❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Prof. Andrea Perego
Dispense di
Fisica Generale
Ad uso degli studenti del C.d.L. in Informatica
A.A. 2014–2015
(Quarta edizione)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Queste dispense sono state redatte per fornire agli studenti un testo dove gli argomenti del corso
siano trattati in modo analogo a quello delle lezioni in aula e con lo stesso formalismo. Allo scopo
di migliorare per quanto possibile la loro utilità, l’autore chiede ai lettori una collaborazione attiva
nel segnalare tutto ciò che essi trovino di errato o esposto in maniera non chiara.
Bogliasco, 10 marzo 2012
Andrea Perego
Nel presentare la quarta edizione delle dispense l’autore vuole ringraziare sentitamente gli studenti che gli hanno segnalato e permesso di correggere un certo numero di errori tipografici e non,
alcuni non rilevabili con sistemi automatici di correzione ortografica.
Bogliasco, 4 gennaio 2015
Andrea Perego
Copyright e licenza d’uso
Questo testo è proprietà intellettuale di
Andrea Perego – Università di Firenze, Dipartimento di Fisica e Astronomia.
L’autore concede a chiunque la facoltà di riprodurre, distribuire, utilizzare il materiale incluso
nel rispetto delle norme che seguono:
• l’utilizzo è concesso solo a fini didattici e per distribuzione gratuita.
• L’utilizzatore dovrà citare la fonte del materiale prelevato. Nel riprodurre questo testo non è
consentito cancellare o alterare la presente licenza d’uso e/o le altre indicazioni di proprietà
intellettuale.
• Qualora il materiale sia inserito in un’altra opera d’ingegno, dovrà risultare perfettamente identificabile ciò che origina dalla presente opera e ciò che non ne deriva.
• È vietata la riproduzione totale o parziale, o l’uso di materiale dalla presente opera sotto forma
o all’interno di documenti in formati proprietari di una specifica applicazione. In particolare la
riproduzione e l’uso sono vietati per applicazioni della ditta microsoft o comunque in formati
che prevedano una fruizione esclusiva o privilegiata per la piattaforma “windows”.
2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Indice
Capitolo 1: Concetti generali di fisica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.1: Il metodo sperimentale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.2: Grandezze fisiche e loro misura. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2.1: Tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2.2: Lunghezza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2.3: Massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2.4: Multipli e sottomultipli dell’unità di misura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3: Errori di misura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.3.1: Errori di taratura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.3.2: Errori di sensibilità e di lettura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.3.3: Errori statistici o a posteriori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.3.4: Propagazione dell’errore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.4: Analisi dimensionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Capitolo 2: Cinematica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.1: Sistemi di coordinate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.1.1: Coordinate cartesiane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.1.2: Coordinate cilindriche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.1.3: Coordinate sferiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2: Traiettoria. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3: Il vettore posizione e spostamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.4: Proprietà dei vettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.4.1: Vettori e scalari. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.4.2: Convenzioni di scrittura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.4.3: Vettori e componenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.4.4: Somma di vettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
2.4.5: Moltiplicazione di un vettore per uno scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.4.6: Versori, versori degli assi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.4.7: Prodotto scalare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.4.8: Prodotto vettoriale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.4.9: Composizione di prodotti vettoriali. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.4.10: Derivate e integrali di vettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.5: Descrizione del moto mediante i vettori posizione e spostamento . . . . . . . . . . . . . . . . . . . . . . 35
2.6: Definizione di velocità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.7: Accelerazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.7.1: Velocità e accelerazione in componenti intrinseche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.7.2: Tipi possibili di traiettoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.8: Moti vincolati e gradi di libertà . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.8.1: Moto circolare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.8.2: Moto lungo una traiettoria parabolica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.8.3: Moto piano in coordinate polari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.9: Cinematica dei sistemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.9.1: Il corpo rigido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.10: Movimento relativo di sistemi di riferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.11: Moto del corpo rigido – concetto di rotazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
2.11.1: Accelerazione dei punti del corpo rigido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.12: Rotolamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Capitolo 3: Dinamica del punto materiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.1: Forza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.2: Massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.2.1: Concetto di punto materiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.3: Esperienze che portano alle leggi della dinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.4: Le leggi di Newton. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
3.4.1: La prima legge di Newton. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.4.2: La seconda legge di Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.4.3: La terza legge di Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.5: Interpretazione delle esperienze alla luce delle leggi di Newton . . . . . . . . . . . . . . . . . . . . . . . . 69
3.5.1: Caduta dei gravi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.5.2: Piano orizzontale e inclinato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.5.3: Apparecchio di Fletcher . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
3.6: Vincoli e reazioni vincolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.6.1: Vincoli bilateri e unilateri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.6.2: Vincoli di massa trascurabile e forze applicate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.7: Forze di attrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.7.1: Attrito fra solidi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.7.2: Attrito nel moto attraverso un fluido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.8: Integrazione delle equazioni di moto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.8.1: Integrazione diretta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
3.8.2: Casi semplici di integrazione diretta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.8.3: Separazione delle variabili. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.8.4: Moltiplicazione per la derivata prima. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.8.5: Equazioni differenziali lineari a coefficienti costanti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.9: Esempi di studio di moti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.9.1: Moto di un oggetto lanciato. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.9.2: Oggetto che cade in un liquido viscoso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.9.3: Moto di un corpo sotto l’effetto di una molla ideale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.9.4: Pendolo semplice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.10: Sistemi non inerziali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
3.10.1: Sistema non inerziale che trasla rispetto a quello inerziale . . . . . . . . . . . . . . . . . . . . . . . 95
3.10.2: Piattaforme girevoli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
3.11: La Terra come sistema non inerziale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
3.11.1: Effetto della forza centrifuga sulla forza peso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
3.11.2: Effetti della forza di Coriolis. Deviazione verso oriente dei gravi in caduta . . . . . . . 102
Capitolo 4: Dinamica dei sistemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.1: Quantità di moto e prima equazione cardinale della dinamica . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.2: Il centro di massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.2.1: Esempi di calcolo di centri di massa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
4.3: Il concetto di momento di forza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
4.4: Momento angolare e seconda equazione cardinale della dinamica . . . . . . . . . . . . . . . . . . . . . . 115
4.5: Momento angolare di un corpo rigido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
4.6: La II equazione cardinale per un corpo rigido con ω costante in direzione . . . . . . . . . . . . . 120
4.7: Proprietà del momento d’inerzia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
4.8: Esempi di calcolo di momenti d’inerzia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
4.8.1: Sbarra rettilinea sottile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
4.8.2: Rettangolo e parallelepipedo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
4.8.3: Momenti d’inerzia di un cerchio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
4.8.4: Momenti d’inerzia di un cilindro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
4.8.5: Momento d’inerzia di una sfera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
4.9: Alcuni risultati sui momenti di forza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
4.9.1: Il vincolo di perno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
4.9.2: Vincoli di massa trascurabile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
4.9.3: Momento risultante delle forze peso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
4.10: Statica dei sistemi meccanici e dei corpi rigidi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
4.11: Esempi di studio di moti di sistemi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
4.11.1: Ruota che rotola lungo un piano inclinato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
4.11.2: Pendolo composto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
4.11.3: Sbarra vincolata a due guide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
6
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Capitolo 5: Energia meccanica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
5.1: Le macchine semplici e il lavoro meccanico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
5.2: Teorema delle forze vive ed energia cinetica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
5.3: Forze conservative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
5.4: Conservazione dell’energia meccanica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
5.5: Energia potenziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
5.5.1: Energia potenziale della forza peso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
5.5.2: Energia potenziale elastica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
5.5.3: Energia potenziale di un’interazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
5.6: Lavoro e forze vincolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
5.7: Lavoro e energia cinetica per un corpo rigido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
5.7.1: Teorema di König . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
5.8: Studio del moto attraverso l’energia potenziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
5.8.1: Energia potenziale e equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
5.8.2: Piccole oscillazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
5.9: Energia potenziale centrifuga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
5.10: Potenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
5.10.1: Potenza e motori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
5.11: Applicazione della conservazione dell’energia allo studio di moti . . . . . . . . . . . . . . . . . . . . . 172
5.11.1: Pendolo semplice e composto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
5.11.2: Ruota che rotola lungo un piano inclinato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
5.11.3: Sbarra vincolata a due guide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
5.11.4: Pendolo su carrello mobile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
5.11.5: Disco rotolante in una guida circolare che ruota con velocità angolare costante . . . 179
Capitolo 6: Gravitazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
6.1: Le leggi di Keplero. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
6.2: Derivazione approssimata della forza gravitazionale per orbite circolari. . . . . . . . . . . . . . . . 185
7
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
6.3: Calcolo della forza gravitazionale per le orbite ellittiche. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
6.3.1: Proprietà dell’ellisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
6.3.2: Calcolo della forza gravitazionale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
6.4: La legge della gravitazione universale. Massa inerziale e gravitazionale . . . . . . . . . . . . . . . . 190
6.5: L’esperienza di Cavendish. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
6.6: Energia potenziale gravitazionale. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
6.7: Forza gravitazionale di una distribuzione di massa a simmetria sferica . . . . . . . . . . . . . . . . 196
6.8: Il problema dei due corpi soggetti all’interazione gravitazionale . . . . . . . . . . . . . . . . . . . . . . . 199
Capitolo 7: Urti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
7.1: Impulso di una forza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
7.2: Proprietà degli urti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
7.3: Urti fra due particelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
7.3.1: Urti elastici unidimensionali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
7.3.2: Urti elastici bidimensionali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
7.4: Esempi di urti in sistemi meccanici. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
7.4.1: Il pendolo balistico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
7.4.2: Fisica del biliardo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
Appendice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
A.1: Formulario di trigonometria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
A.1.1: Definizioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
A.1.2: Traslazione di angoli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
A.1.3: Formule di addizione e sottrazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
A.1.4: Formule di duplicazione e bisezione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
A.1.5: Formule di prostaferesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
A.1.6: Risoluzione dei triangoli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
A.1.7: Equivalenza di funzioni trigonometriche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
A.1.8: Funzioni trigonometriche e calcolo infinitesimale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
8
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
A.1.9: Funzioni trigonometriche inverse. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
A.2: Elementi di calcolo infinitesimale dal punto di vista della fisica . . . . . . . . . . . . . . . . . . . . . . . 233
A.2.1: La derivata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
A.2.2: Funzioni di più variabili e derivate parziali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
A.2.3: Integrali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
A.2.4: Integrali di superficie, di volume e di linea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
A.3: Energia potenziale all’interno di una distribuzione sferica di massa . . . . . . . . . . . . . . . . . . . 248
A.4: Problema dei due corpi con interazione gravitazionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
A.4.1: L’iperbole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
A.4.2: La parabola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251
A.4.3: La traiettoria sotto l’effetto della forza gravitazionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252
9
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
10
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
1.
Concetti generali di fisica
1.1 Il metodo sperimentale
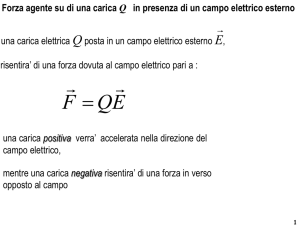
La ricerca in fisica si basa sul cosiddetto metodo sperimentale o metodo galileiano. Un’analisi
approfondita del metodo sarebbe ben al di là delle possibilità di questa dispensa, per cui ci limitiamo
a delinearne gli aspetti principali in modo estremamente semplificato e sintetico. Per farlo ci
serviremo dello schema in fig. 1.1.1.
Esperimenti
Esperimenti
di verifica
Dati
sufficienti?
De du zi on e
Determinazione
conseguenze
dell’ipotesi
Induzione
no
Osservazione
del fenomeno
no
Accordo?
sì
sì
Dati
no
sufficienti?
Formulazione
ipotesi
di legge fisica
sì
Legge fisica
Fig. 1.1.1: Schema del percorso che porta alla determinazione di una legge fisica.
Il processo inizia con l’osservazione di un qualche fenomeno, che si decide di studiare. Lo
studio avviene attraverso l’esecuzione di una serie di esperimenti. Ogni esperimento consiste nel
provocare o attendere che si produca naturalmente (in alcuni casi, come, per esempio, ricerche sui
raggi cosmici, lo sperimentatore è completamente “passivo”) il fenomeno, controllando e variando
di volta in volta le condizioni sotto le quali avviene, e misurando una o più grandezze fisiche
relative al medesimo. I concetti di grandezza fisica e misura sono fondamentali e saranno illustrati
immediatamente nel seguito.
Gli esperimenti ripetuti porteranno ad acquisire una quantità di dati da cui sarà possibile, sperabilmente, ipotizzare l’esistenza di una o più relazioni fra le grandezze fisiche che sono state prese
11
1.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
in considerazione. Questa fase del processo è fondamentalmente induttiva e porta alla formulazione
di un’ipotesi di legge fisica. Il premio Nobel per la Fisica Richard Feynman in una sua lezione usa
per questa fase il termine guess, ovvero congetturare. Più precisamente, si tratta di quello che in
inglese è chiamato educated guess, ossia un “congetturare”, ma ragionando razionalmente in base
a una serie di dati oggettivi.
Una volta formulata l’ipotesi, se ne possono dedurre le conseguenze, ossia predire il risultato
di altri fenomeni, sui quali si condurranno esperimenti di verifica. Se il risultato anche di un solo
esperimento di verifica contrasta con l’ipotesi fatta, questa dovrà essere abbandonata o riformulata
in modo da tener conto del disaccordo, o, se necessario, si dovrà tornare a eseguire esperimenti che
aiutino una nuova formulazione.
Quando un’ipotesi di legge fisica viene verificata in un numero sufficiente di esperimenti può
essere accettata come legge fisica vera e propria. Quale sia il numero “sufficiente” di esperimenti
è una questione per cui non esiste una risposta unica preconfezionata: il mondo della ricerca
normalmente avvia un dibattito in proposito caso per caso. Il procedimento di verifica dell’ipotesi
di legge è fondamentalmente deduttivo.
È da notare che qualsiasi legge fisica non costituirà mai una verità assoluta, anche se risulta
verificata in un numero vastissimo di fenomeni. L’epistemologo Karl Popper ha sottolineato che
una legge fisica si può chiamare tale solo in quanto risulta falsificabile, termine che nel contesto
non significa che è “imitabile in modo fraudolento”, ma che “può essere dimostrata falsa da un
[successivo] esperimento”.
Nella storia della fisica è successo che determinate leggi ritenute valide per secoli siano state poi
“falsificate” relativamente alla loro applicabilità in determinati campi. Ad esempio, al passaggio
fra il XIX e il XX secolo esperimenti condotti sugli atomi e su fenomeni relativi alle onde elettromagnetiche hanno confutato la validità della meccanica e dell’elettrologia “classiche” quando si
ha a che fare con sistemi di dimensioni a livello atomico e inferiore e/o con velocità dell’ordine di
quella della luce nel vuoto. Da queste evidenze sperimentali è nata la cosiddetta “fisica moderna”,
basata sulle teorie della meccanica quantistica e della relatività ristretta e generale. Tuttavia, per
la stragrande maggioranza dei fenomeni che percepiamo direttamente con i nostri sensi nella vita
quotidiana, lo scarto fra le predizioni della fisica moderna e di quella classica rimane al di sotto
di quello che può minimamente avere interesse pratico e quindi le leggi classiche, che permettono
di calcolare l’andamento dei fenomeni in modo estremamente più semplice, si possono considerare
ancora valide. Esistono alcune eccezioni, come ad esempio il sistema di posizionamento GPS, che
può funzionare solo in quanto progettato tenendo conto dei risultati della relatività generale, per
cui l’orologio su un satellite va avanti di circa 38 µs al giorno rispetto a un orologio identico fermo
sulla superficie terrestre.
1.2 Grandezze fisiche e loro misura
Una grandezza fisica è una qualsiasi quantità che può essere misurata. Ogni grandezza fisica ha
una sua definizione operativa, ossia deve essere definita attraverso la descrizione esatta e univoca
del procedimento con cui viene misurata. Il processo di misura può essere diretto, nel qual caso
implica il confronto della grandezza da misurare con un campione che costituisce l’unità di misura
della grandezza stessa, oppure indiretto, ossia costituito dalla misura diretta di altre grandezze
che poi sono combinate in un’espressione (ad esempio, una misura indiretta di velocità implica la
determinazione di una lunghezza e di un tempo, di cui si prenderà il rapporto).
In meccanica esistono tre grandezze fondamentali che vengono misurate direttamente e quindi
richiedono un campione di unità di misura. Nel sistema di misura SI, adottato a livello mondiale
in campo scientifico, avremo:
1.2
12
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
1.2.1 Tempo
L’unità di tempo, il secondo, era definita fino al 1967 su base astronomica, come sottomultiplo
della durata di un anno solare, ma poi si è preferito utilizzare come unità di riferimento il periodo dell’onda elettromagnetica emessa nella transizione fra due livelli dell’isotopo 133 del Cesio,
prendendone un multiplo. Definire il secondo in base a un fenomeno microscopico assicura una
migliore precisione e riproducibilità del campione. Si usa il simbolo s per indicare il secondo. È da
notare che nella meccanica classica il tempo costituisce una variabile indipendente, mentre la fisica
relativistica unisce il tempo e le tre componenti dimensionali dello spazio in un unico oggetto a 4
dimensioni chiamato “spazio–tempo”.
1.2.2 Lunghezza
L’unità di lunghezza è il metro. Anch’esso è stato definito inizialmente in base a un campione
macroscopico, una barra di platino–iridio conservata in Francia all’Ufficio Internazionale di Pesi e
Misure di Sèvres. In seguito si è definito come lo spazio percorso dalla luce nel vuoto in una data
frazione di secondo. Si usa m come simbolo per indicare il metro.
1.2.3 Massa
L’unità di misura della massa è il chilogrammo ed è tutt’ora rappresentata da un campione
macroscopico di platino–iridio conservato a Sèvres. Sul metodo di confronto ci soffermeremo in
seguito. Si usa il simbolo kg per indicare il chilogrammo.
Mentre le unità “microscopiche” possono essere riprodotte direttamente, quando necessario, nei
laboratori di tutto il mondo, per le misure di massa dal campione primario nominato sopra sono
stati ricavati campioni secondari e cosı̀ via, fino a quelli usati nei singoli laboratori.
1.2.4 Multipli e sottomultipli dell’unità di misura
Le misure di una determinata grandezza fisica possono spaziare, a seconda dei casi, in un campo
molto vasto di ordini diversi. Per comodità di scrittura e di citazione vengono quindi usati prefissi
che esprimono l’ordine di grandezza, generalmente di 3 in 3 ordini. Diamo di seguito una tabella
dei prefissi che saranno usati durante il corso.
Nome
Simbolo
moltiplicatore
Tera
T
1012
Giga
G
109
Mega
M
106
kilo
k
103
milli
m
10−3
micro
µ
10−6
nano
n
10−9
pico
p
1012
Tab. 1.2.4: Multipli e sottomultipli delle unità di misura.
13
1.2.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
1.3 Errori di misura
Ogni operazione di misura fornisce un risultato che non rappresenta un valore esatto della
quantità misurata ma solo un’approssimazione più o meno buona, a seconda delle condizioni e
degli strumenti usati per misurare. Se, ad esempio, misuriamo la lunghezza di un tavolo usando un
metro a nastro, la nostra misura avrà un limite di precisione di almeno mezzo millimetro, mentre
un micrometro ci fornirà misure di lunghezza, fino a un massimo di qualche centimetro, con la
precisione del centesimo di millimetro.
Fig. 1.3.1: Micrometro.
Il limite di precisione di una misura è chiamato errore di misura: esso deve sempre essere citato
assieme al valore della misura a cui si riferisce. Il risultato di una misura dato senza il rispettivo
errore non ha alcun valore fisico, o scientifico in generale.
L’errore su una quantità q viene di solito indicato come ∆q e può essere espresso direttamente
tramite l’intervallo di incertezza:1
l = (1.251 ± 0.001) m
ossia
l = 1.251 m,
∆l = 1 mm
nel qual caso si parla di errore assoluto oppure come percentuale della misura, ossia come errore
relativo
l = 1.2514 m,
∆l
= 0.08%
l
L’errore assoluto e l’errore relativo forniscono la stessa informazione e sono quindi del tutto equivalenti, tuttavia in alcuni casi l’errore relativo dà un’idea più immediata della precisione della misura;
al contrario, l’errore relativo perde di significato quando si misurano quantità il cui valore oscilla
nell’intorno di zero (è addirittura matematicamente impossibile esprimere l’errore relativo di una
misura con risultato nullo). In ogni caso l’errore espresso come ∆q è una quantità positiva che
rappresenta il massimo scarto in valore assoluto fra la misura e la grandezza misurata. Se diciamo
quindi di avere misurato una quantità q trovando un valore q0 ± ∆q, diciamo che la grandezza è
compresa nell’intervallo di valori q0 − ∆q ≤ q ≤ q0 + ∆q.
1
In questo testo utilizzeremo il punto come separatore per i decimali, allineandoci alla convenzione anglosassone.
Questo sia perché la lingua della comunicazione scientifica internazionale è l’inglese, sia perché la stragrande maggioranza dei linguaggi di programmazione, usati per il calcolo scientifico, si attengono a questa convenzione.
1.3
14
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Di norma, l’errore di misura dà solo l’ordine di grandezza del limite di precisione ed è quindi
espresso con non più di una o due cifre significative (un errore ∆l = 1.234 mm non avrebbe molto
senso). L’errore, infine, stabilisce un limite al numero di cifre significative con cui è corretto
riportare il risultato di una misura: non avrebbe senso, ad esempio, scrivere l = (1.2345 ± 0.1) m.
Allo stesso tempo ha senso aggiungere zeri dopo il punto decimale per il risultato della misura, in
funzione della precisione della medesima. Se scriviamo ad esempio l = 5 m sottintendiamo un errore
di misura dell’ordine dei metri, mentre se scriviamo l = 5.0 m l’errore si suppone dell’ordine delle
decine di centimetri. Sarebbe quindi poco corretto scrivere l = (5 ± 0.01) m, mentre si dovrebbe
scrivere l = (5.00 ± 0.01) m.
Gli errori di misura si possono raggruppare, senza la pretesa di una classificazione esatta, in
base alla causa che li origina.
1.3.1 Errori di taratura
Derivano dalla precisione intrinseca dello strumento con cui viene effettuata la misura. Di solito
sono forniti dal costruttore dello strumento stesso. Ad esempio, un multimetro digitale tascabile
può avere una precisione di taratura dello 0.5%, il che significa che ogni misura effettuata col
medesimo ha questo errore relativo.
1.3.2 Errori di sensibilità e di lettura
L’errore di sensibilità di uno strumento è dato dalla minima variazione della quantità misurata
che esso è in grado di rivelare.
Fig. 1.3.2: Multimetro digitale.
Ad esempio, il multimetro digitale della fig. 1.3.2 sta misurando una tensione di 18.91 V (Volt).2
In queste condizioni il suo errore di sensibilità è di 0.01 V.
Quando la misura viene letta attraverso una scala analogica, come ad esempio su un normale
metro, si parla di errore di lettura intendendo l’indeterminazione con cui l’occhio dell’operatore
riesce a operare il confronto.
1.3.3 Errori statistici o a posteriori
Gli errori di taratura e sensibilità sono detti anche errori a priori, perché conoscendo le condizioni
e lo strumento usato si può prevedere l’errore prima ancora di effettuare la misura. Esistono invece
casi in cui ripetendo la stessa misura nelle stesse condizioni i risultati variano di volta in volta con
differenze molto maggiori dei limiti di sensibilità. In una tale situazione, a meno che non vi sia un
2
L’immagine è puramente esemplificativa: lo strumento infatti ha i terminali di misura staccati!
15
1.3.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
effetto sistematico di cui non si è tenuto conto (ad esempio, se si è misurata una grandezza che
dipende anche dalla temperatura mentre questa stava variando nel laboratorio) si attribuisce la
dispersione delle misure alla somma di tante piccole fluttuazioni/perturbazioni, che si ripercuotono
in modo diverso e casuale in ciascuna di esse. Avendo a disposizione un certo numero di misure,
si può ricavare con procedimenti statistici un errore a posteriori, che comunque ha un significato
probabilistico (esprime l’intervallo di valori entro cui la misura ha una determinata probabilità di
cadere).
Va notato che, mentre nel campo della fisica classica la dispersione delle misure è legata a
piccole fluttuazioni delle condizioni in cui esse avvengono, esistono fenomeni della fisica moderna/microscopica che sono direttamente governati da leggi di tipo probabilistico. Ad esempio, il
tempo per cui un singolo isotopo instabile vive prima di decadere con una reazione nucleare non è
determinato, ma si conosce solo la probabilità di decadimento in funzione del tempo. Se misuriamo,
quindi, più volte il numero di isotopi che decadono in un dato tempo in una sorgente radioattiva,
troveremo sempre un risultato diverso.
Dobbiamo infine considerare il fatto che l’operazione stessa del misurare una grandezza fisica
può perturbare il sistema su cui si effettua la misura, modificando il valore della grandezza misurata e lasciando il sistema in uno stato diverso da quello iniziale. Si pensi, ad esempio, a quello
che succederebbe se volessimo misurare la temperatura di una piccola quantità d’acqua con un termometro tradizionale avente un bulbo di volume paragonabile a quello del liquido: evidentemente
il risultato risentirebbe pesantemente anche della temperatura del bulbo prima della sua immissione nell’acqua. Mentre nel campo di validità della fisica classica questo problema è di ordine
tecnico e si può pensare di minimizzare gli effetti perturbativi, nella meccanica quantistica vale il
principio di indeterminazione, per cui risulta intrinsecamente impossibile, ad esempio, misurare
contemporaneamente con precisione la posizione e la velocità di una particella.
1.3.4 Propagazione dell’errore
Si chiama propagazione dell’errore il procedimento con cui si attribuisce l’errore a una quantità
che non è stata misurata direttamente, ma determinata attraverso la misura di altre. Supponiamo
ad esempio di determinare l’area di un rettangolo da misure dirette di due lati contigui, con risultati
a e b ed errori ∆a e ∆b. L’area sarà data da A = a b. Considerando l’area A come funzione di
a e b, possiamo considerare il differenziale dA = b da + a db, approssimando al primo ordine la
variazione della funzione al variare di a e di b. Sappiamo che la variazione di a rispetto al valore
“vero” sarà compresa nell’intervallo −∆a ≤ da ≤ ∆a, ossia |da| ≤ ∆a; analogamente |db| ≤ ∆b.
Conseguentemente il massimo scarto in valore assoluto ∆A fra l’area misurata e il suo valore
vero sarà dato da ∆A = b ∆a + a ∆b. In generale, se vorremo calcolare l’errore su una quantità
f = f (a1 , a2 . . . an ) scriveremo
�
�
�
�
�
�
�
n �
�
� ∂f �
� ∂f �
� ∂f �
� ∂f �
�
�
�
�
�
�
�
�
∆f = �
∆a1 + �
∆a2 + . . . + �
∆an =
� ∂ai � ∆ai
∂a1 �
∂a2 �
∂an �
(1.3.1)
i=1
Su questa relazione si devono fare alcune osservazioni
1. essa è valida solo quando le quantità a1 . . . an sono misurate in modo indipendente l’una dall’altra. Se alcune di esse fossero misurate indirettamente per mezzo di una stessa quantità, ad
esempio a1 = f1 (b, . . .) e a2 = f2 (b, . . .) la dipendenza in comune da b dovrebbe essere esplicitata
in f prima della propagazione.
2. il risultato della formula corrisponde alla situazione in cui tutti i contributi all’errore hanno
segno tale da sommarsi effettivamente e quindi costituisce una stima “pessimista” dell’errore su
1.3.4
16
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
f detta errore massimo.
Nel caso di errori statistici la formula (1.3.1) è decisamente inadeguata, per quanto detto al
punto 2 sopra. Si può dimostrare che la propagazione corretta richiede una formula quadratica:
∆f =
��
∂f
∂a1
�2
(∆a1 )2 +
�
∂f
∂a2
�2
(∆a2 )2 + . . . +
�
∂f
∂an
�2
�
� n �
�
�� ∂f 2
2
�
(∆an ) =
(∆ai )2
∂a
i
i=1
(1.3.2)
Per chiarezza facciamo un esempio concreto di propagazione dell’errore. Supponiamo di avere
misurato direttamente una lunghezza trovando il valore a ± ∆a, numericamente a = (5.0 ± 0.1) m.
Consideriamo ora una nuova grandezza b, dimensionalmente una superficie, che è data dalla relazione b = a2 . Calcoliamo la propagazione dell’errore su b con la formula (1.3.1) e otteniamo
∆b = 2 |a| ∆a, da cui numericamente b = 25 m2 , ∆b = 2 · 5.0 m · 0.1 m = 1 m2 . Supponiamo adesso
di voler calcolare l’errore su una terza grandezza c che è data da c = a/b. Se b fosse stata misurata
in modo indipendente e non calcolata a partire dalla misura di a sarebbe stato corretto usare la
(1.3.1) a partire da a e b ed avremmo avuto
� �
�
�
�a�
�1�
0.1 m
5m
1
1
� �
2
�
�
∆c = � � ∆a + � 2 � ∆b =
+
· 1m =
+
m−1 = 0.012 m−1
b
b
25 m2
625 m4
250 125
(1.3.3)
Invece, essendo b funzione di a, non possiamo propagare l’errore su c con la (1.3.3), ma dobbiamo
esplicitare la dipendenza: c = a/a2 = 1/a. Se propaghiamo l’errore a partire solo da a, l’unica
quantità misurata in modo indipendente, abbiamo
� �
�1�
1
1
∆c = �� 2 �� ∆a =
· 0.1 m =
m−1 = 0.004 m−1
a
25 m2
250
(1.3.4)
Si nota come l’errore corretto, fornito dalla (1.3.4), risulti minore di quello dato dalla (1.3.3).
Questo è dovuto al fatto che la (1.3.3) sarebbe corretta se b fosse una quantità misurata indipendentemente da a: in tal caso gli scarti di a e b dai valori “veri” non sarebbero correlati e si potrebbe
avere, ad esempio, il caso in cui lo scarto su a è positivo mentre quello su b è negativo, ed entrambi
contribuiscono a far aumentare il rapporto. In realtà, essendo b funzione di a, quando il valore
misurato di a supera il valore “vero”, anche quello di b deve fare altrettanto, per cui si ha una
compensazione nel rapporto.
1.4 Analisi dimensionale
Ogni grandezza fisica ha una sua dipendenza funzionale dalle grandezze fondamentali, a cui
corrispondono quelle che si chiamano dimensioni della grandezza stessa. In meccanica abbiamo le
tre grandezze fondamentali viste in 1.2, che indicheremo con i simboli L (lunghezza), T (tempo), M
(massa). Se consideriamo ad esempio la velocità, essa è definita come il rapporto fra una lunghezza
e un intervallo di tempo: potremo esprimere questa dipendenza attraverso quella che si chiama
equazione dimensionale, dove il simbolo [g] sta per “le dimensioni della grandezza fisica g”.
[v] =
L
= L T −1
T
17
(1.4.1)
1.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Analogamente, come vedremo in seguito, un’accelerazione a è data dal rapporto fra una differenza
di velocità e un intervallo di tempo, mentre una forza F risulta dal prodotto di una massa per
un’accelerazione. Avremo
L
T
[a] =
= L T −2
T
[F ] = L M T −2
(1.4.2)
In generale, ogni grandezza meccanica X sarà rappresentata da un’equazione dimensionale del tipo
[X] = Li M j T k
(1.4.3)
Lo stesso ragionamento vale anche per le grandezze fisiche non meccaniche, a patto di aggiungere
come altra grandezza fondamentale la corrente elettrica.
La correttezza delle dimensioni è un presupposto fondamentale perché una qualsiasi formula
contenente grandezze fisiche abbia senso. Un errore concernente le dimensioni è per un fisico, o
chiunque si occupi della materia, studenti compresi, l’equivalente di una terribile “stecca”, nell’aria
più famosa dell’opera, per un cantante lirico. Per questo motivo occorre prestare la massima
attenzione alla correttezza dimensionale di ogni espressione che si scrive; allo stesso tempo la
verifica dimensionale costituisce un metodo utile per scoprire errori di natura algebrica nei calcoli.
Diamo quindi alcune indicazioni utili in materia:
1. Se un’espressione è costituita di più parti che si sommano o sottraggono fra loro, ognuna di
queste parti deve avere le stesse dimensioni dell’espressione finale.
2. Quando le quantità fisiche contenute in un’espressione sono rappresentate da simboli algebrici, a
ciascun simbolo sono implicitamente associate le dimensioni. Prendiamo ad esempio l’equazione
del moto armonico di un oggetto attaccato a una molla
m
d2 x
= −kx
dt2
(1.4.4)
dove x rappresenta la coordinata spaziale del punto che si muove, m la sua massa e k la costante
elastica della molla. Avremo ovviamente [x] = L, [m] = M , la costante della molla rappresenta
il rapporto fra la forza esercitata dalla molla e il suo allungamento, per cui [k] = M T −2 .
La derivata seconda rispetto al tempo
� corrisponde
� – dimensionalmente parlando – a dividere
per un tempo al quadrato, per cui m (d2 x/dt2 ) = L M T −2 . Per l’altro termine abbiamo
[kx] = L M T −2 . L’equazione risulta quindi dimensionalmente corretta. Controlli di questo
genere devono essere effettuati ad ogni passaggio dei calcoli algebrici.
3. Quando si passa a effettuare la valutazione numerica, ai simboli che rappresentano le grandezze
fisiche si sostituiranno i valori con le rispettive unità di misura. Solo in questo modo sarà possibile mantenere la correttezza delle espressioni e controllare il risultato da un punto di vista
dimensionale. Purtroppo la fretta e la faciloneria portano a volte gli studenti (e non solo!)
a effettuare calcoli senza le unità di misura, che vengono poi “appiccicate” al risultato finale.
Questo metodo, oltre a produrre espressioni scorrette se praticato per iscritto, porta facilmente
ad errori clamorosi e pertanto non sarà accettato nei compiti scritti del corso.
Come esempio, supponiamo di voler calcolare dalla (1.4.4) il valore dell’accelerazione a0 dell’oggetto quando la molla è spostata di una lunghezza x0 . Sia x0 = 0.10 m, m = 2.0 kg,
1.4
18
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
k = 50.0 N · m−1 il valore della costante elastica della molla.3 Dalla (1.4.4) si ha
a0 = −
k
x0
m
da cui
50.0 N · m−1
0.10 m =
2.0 kg
m · kg · s−2 · m−1
= −2.5
m = −2.5 m · s−2
kg
a0 = −
(1.4.5)
In generale, un’espressione simbolica fornisce più informazione, e non solo di natura dimensionale, di una in cui siano stati eseguiti, anche parzialmente, i calcoli numerici. Per questo motivo
è quasi sempre fortemente consigliabile eseguire tutti i calcoli relativi a un problema di fisica,
finché possibile, per via puramente algebrica e sostituire i valori numerici solo dopo che sono
state ottenute le formule finali per le quantità cercate.
3
La forza ha una propria unità di misura, derivata da quelle fondamentali, il newton, rappresentata col simbolo N .
La forza di 1 N è definita come quella che, applicata in un sistema inerziale a un corpo di massa pari a 1 kg, lo
fa muovere con accelerazione 1 m · s−2 . Quindi, dimensionalmente, 1 N = 1 m · kg · s−2 La costante della molla
rappresenta una forza per unità di allungamento e quindi si misura convenientemente in N/m.
19
1.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
20
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
2.
Cinematica
Si chiama cinematica quella parte della meccanica che ha come scopo la descrizione di ogni moto
possibile degli oggetti. Abbiamo evidenziato la parola descrizione per sottolineare che la cinematica
non si occupa di determinare quale sarà il moto effettivo di un sistema dovuto alle interazioni fra
i suoi componenti o fra essi e gli oggetti esterni, ma solo di parametrizzare e descrivere tutti i
possibili moti permessi al sistema in base alle sue caratteristiche. Per fare un esempio concreto,
consideriamo un percorso di “montagne russe” di un luna–park: la cinematica studia il modo
di descrivere in modo compiuto e sintetico la posizione dei vagoni in funzione del tempo, con
la condizione che questi si muovano lungo le rotaie, ma non si occupa di determinare con quale
velocità questi si muoveranno effettivamente una volta lasciati andare dal punto iniziale.
Alla base della cinematica sta l’assunzione che ogni sistema meccanico si possa ricondurre a un
insieme finito o infinito di punti: descrivere il moto del sistema significa dare la posizione nello
spazio di ciascun punto in funzione del tempo. Questo porta ad affrontare come compito iniziale
la descrizione del moto di un singolo punto.
2.1 Sistemi di coordinate
Per conoscere la posizione di un punto nello spazio avremo bisogno di un sistema di riferimento
e delle relative coordinate del punto rispetto al medesimo. Lo spazio della meccanica classica è il
“normale” spazio a 3 dimensioni della geometria euclidea. La posizione di un punto può essere
determinata per mezzo di sistemi di coordinate diversi.
Z
P
z
O
Y
y
x
X
Fig. 2.1.1: Coordinate cartesiane ortogonali.
21
2.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
2.1.1 Coordinate cartesiane
Il metodo più usato per rappresentare la posizione di un punto nello spazio è quello che usa un
sistema di coordinate cartesiane ortogonali. Da un punto O, detto origine del sistema escono tre
linee orientate fra loro ortogonali, dette rispettivamente asse X, asse Y e asse Z. La posizione di
un punto P è espressa tramite la misura delle proiezioni ortogonali del punto, (x, y, z), sui tre assi.
Da notare che le proiezioni possono risultare sia positive che negative.
Per convenzione, in meccanica si utilizza una terna di coordinate cosiddetta destrorsa. Questo
significa che gli assi X, Y e Z sono orientati rispettivamente come il pollice, l’indice e il medio
della mano destra quando le tre dita sono tenute perpendicolari fra loro. Esiste tuttavia un modo
più elegante e conveniente per determinare l’orientamento di una terna di assi, che viene vivamente
raccomandato agli studenti piuttosto che mettersi a “giocare” con le dita delle mani, anche perché
lo stesso sistema è utile, come vedremo, in altre situazioni. Osserviamo che gli assi X, Y e Z
stanno fra loro in una relazione ciclica, indicata schematicamente in fig. 2.1.2, per cui all’asse X
segue Y , a Y segue Z e a Z segue X. Allora, se la terna è destrorsa e noi immaginiamo di guardare
dalla “punta” di uno degli assi (asse Z in figura) l’asse successivo (l’asse X) vedremo il terzo asse
(l’asse Y ) ruotato di 90◦ in senso antiorario rispetto al secondo.
Z
x
y
Y
z
O
X
Fig. 2.1.2: Relazione ciclica fra gli assi e osservazione di una terna destrorsa.
La stessa cosa avviene, naturalmente, se guardiamo dalla “punta” dell’asse X o dell’asse Y .
2.1.2 Coordinate cilindriche
Questo sistema di coordinate risulta utile per descrivere situazioni in cui esiste una simmetria
di rotazione intorno ad un asse. Si considera un sistema cartesiano ortogonale, ma, proiettato il
punto P sul piano XY (P’), si considerano come coordinate la distanza r di P’ dall’origine O,
l’angolo ϕ di cui si deve ruotare l’asse X in senso antiorario (visto dalla “punta” dell’asse Z) per
sovrapporlo alla congiungente OP’ e la coordinata cartesiana z di P (vedi fig. 2.1.3). Avremo per
le tre coordinate 0 ≤ r < ∞, 0 ≤ ϕ < 2π, −∞ < z < ∞.
Fra le coordinate cartesiane (x, y, z) e le coordinate cilindriche r, ϕ, zc valgono le seguenti rela-
2.1.2
22
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Z
P
z
Y
P’
r
O
ϕ
X
Fig. 2.1.3: Coordinate cilindriche.
zioni1
r
ϕ
zc
�
= x2 + y 2
= arctan(x, y)
=z
x = r cos ϕ
y = r sin ϕ
z = zc
(2.1.1)
Un caso particolare di coordinate cilindriche si ha quando ci si limita a descrivere la posizione di
un punto in un piano, che si identifica con il piano XY , per cui zc = 0 e si usano solo le coordinate
r, ϕ. In questo caso si parla di coordinate polari.
2.1.3 Coordinate sferiche
Questo sistema di coordinate è particolarmente adatto per le situazioni che presentano simmetria
sferica. In questo caso le coordinate sono date dalla distanza r del punto P dall’origine, dall’angolo
θ formato dall’asse Z con la congiungente OP e dall’angolo ϕ che è definito esattamente come per
le coordinate cilindriche. Avremo 0 ≤ r < ∞, 0 ≤ θ ≤ π, 0 ≤ ϕ < 2π. Le relazioni fra le coordinate
cartesiane e quelle sferiche sono date da
1
�
r = x2 +�y 2 + z 2
�
z
√
θ = arccos
x2 +y 2 +z 2
ϕ = arctan(x, y)
x = r sin θ cos ϕ
y = r sin θ sin ϕ
z = r cos θ
(2.1.2)
Si noti che la coordinata ϕ è stata scritta in funzione di x e y come arctan(x, y) e non semplicemente come
arctan(y/x). Questo perché la normale funzione trigonometrica arctan α è definita nell’intervallo (−π/2, π/2),
mentre l’angolo ϕ, per rappresentare una posizione qualsiasi di P, deve poter variare nell’intervallo 0 ≤ ϕ < 2π o
equivalentemente −π ≤ ϕ < π. La funzione arctangente con due parametri è appunto la versione estesa all’intero
angolo giro: tale funzione esiste nelle librerie matematiche dei principali linguaggi di programmazione, anche se
l’ordine in cui compaiono i parametri varia da linguaggio a linguaggio. Ad esempio, nel linguaggio C esiste la
funzione atan2(p1,p2) dove p1 è la coordinata y e p2 la x. Si veda anche A.1.7 in Appendice.
23
2.1.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Z
P
θ
r
Y
P’
O
ϕ
X
Fig. 2.1.4: Coordinate sferiche.
È da notare che, comunque si scelga il sistema di coordinate, per determinare la posizione di un
punto nello spazio sono sempre necessari tre parametri.
Conoscere il moto di un punto significa conoscere in funzione del tempo le sue coordinate in un
sistema di riferimento determinato, ossia ad esempio, nel caso di coordinate cartesiane, la terna
x(t), y(t), z(t).
x = x(t)
y = y(t)
z = z(t)
(2.1.3)
2.2 Traiettoria
Un punto che si muove cambia la sua posizione da istante a istante: la curva determinata
da queste posizioni costituisce quella che si chiama la traiettoria del moto. Per un moto in tre
dimensioni la traiettoria può essere determinata in un riferimento cartesiano ortogonale da un
sistema di equazioni del tipo2
�
f1 (x, y, z) = 0
f2 (x, y, z) = 0
(2.2.1)
mentre per un moto nel piano x, y la traiettoria è data da un’unica funzione f (x, y) = 0. In molti
casi si può esprimere la traiettoria più convenientemente in modo parametrico, ossia rappresentando
2
Una relazione fra le coordinate definisce in generale una superficie, in generale non piana, e l’intersezione di due
superfici una linea.
2.2
24
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
le coordinate in funzione di un unico parametro p.
x = x(p)
y = y(p)
z = z(p)
(2.2.2)
Se il parametro p coincide con il tempo, la (2.2.2) coincide con la (2.1.3) e si ha la conoscenza
completa del moto. Se si conosce a priori la traiettoria del moto, basterà determinare in funzione
del tempo il parametro p : p = p(t).
In modo analogo la traiettoria può essere rappresentata anche in un altro dei sistemi di riferimento visti precedentemente.
Come esempio di traiettoria, mostriamo quella elicoidale percorsa da un punto che si trova sul
bordo di una vite che viene avvitata o svitata. Se scegliamo un sistema di riferimento avente l’asse
Z coincidente con l’asse della vite, mentre r0 è la distanza del punto considerato dall’asse e h il
passo della vite, ossia l’avanzamento del punto in direzione Z quando la vite compie un giro intero,
potremo esprimere la traiettoria in coordinate cartesiane ortogonali come
� x = r0 cos p
y = r0 sin p
h
z = 2π
p
(2.2.3)
2
1
1.0
!1.0
0.5
!0.5
0.0
0.0
0
0.5
!0.5
1.0
!1.0
Fig. 2.2.1: Traiettoria in un moto elicoidale.
In coordinate cilindriche la traiettoria può essere espressa in modo più semplice, scrivendo le
coordinate r e zc direttamente in funzione della terza coordinata ϕ
� r = r0
h
zc = 2π
ϕ
25
(2.2.4)
2.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
2.3 Il vettore posizione e spostamento
La posizione di un punto è determinata dalle sue coordinate, ma ad essa si può associare anche
un’entità fisica che ha il nome di vettore.
Z
P1
P
Y
O
X
Fig. 2.3.1: Vettori posizione e spostamento.
Dato un punto P, consideriamo un segmento di retta orientato che parte dall’origine O e arriva al
punto P. Convenzionalmente, il segmento viene rappresentato graficamente come una freccia. Questa entità prende il nome di vettore–posizione del punto P e si indica nelle formule con l’espressione
(P − O).
Utilizzare il vettore–posizione non aggiunge alcuna informazione rispetto a quella già fornita
dalle coordinate del punto, ma nel seguito si vedrà che si tratta di un concetto molto utile, anche
perché molte altre grandezze fisiche possono essere convenientemente rappresentate da vettori.
Analogamente al vettore–posizione possiamo definire il vettore–spostamento: se P e P1 sono
due punti nello spazio, chiamiamo vettore–spostamento da P a P1 il segmento di retta orientato
che va dal primo punto al secondo. Indichiamo tale vettore con l’espressione (P1 − P).
Per un vettore possiamo definire le componenti come le proiezioni del segmento orientato lungo
gli assi del sistema di riferimento cartesiano. Nel caso del vettore–posizione queste coincidono con
le coordinate cartesiane del punto P.
(P − O)
⇔
(x, y, z)
+
sist. riferimento
(2.3.1)
La (2.3.1) esprime il fatto che conoscere il vettore–posizione corrisponde biunivocamente a conoscere le coordinate del punto e il sistema di riferimento in cui sono espresse.
Nel caso del vettore–spostamento è facile vedere che se le coordinate di P e P1 sono, rispettivamente, (x, y, z) e (x1 , y1 , z1 ) le componenti del vettore sono date da (x1 − x, y1 − y , z1 − z).
Avremo quindi
(P1 − P)
⇔
(x, y, z)
+
(x1 − x, y1 − y , z1 − z)
+
sist. riferimento
(2.3.2)
ossia che la conoscenza del vettore–spostamento corrisponde a conoscere, in un sistema di riferimento, le coordinate del punto di partenza e le componenti del vettore.
2.3
26
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Possiamo caratterizzare un vettore anche in un modo diverso: chiamiamo modulo del vettore
posizione o spostamento la lunghezza del segmento che lo rappresenta, ossia la distanza fra i suoi
estremi. Il modulo di un vettore posizione e spostamento si indica con la notazione |P − O| e
|P1 − P|, rispettivamente. In termini di componenti il modulo dei vettori è dato dalla radice
quadrata della somma dei quadrati di esse:
�
x2 + y 2 + z 2
�
|P1 − P| = (x1 − x)2 + (y1 − y)2 + (z1 − z)2
|P − O| =
(2.3.3)
Il modulo ovviamente non fornisce tutta l’informazione sul vettore, che però può essere integrata
se aggiungiamo ad esso la direzione e il verso. La direzione e il verso del vettore possono essere
parametrizzati come segue: se trasliamo il vettore senza cambiarne l’orientazione fino a portarne
il punto iniziale a coincidere con l’origine del sistema di riferimento, le coordinate sferiche angolari
θ e ϕ del punto finale identificano univocamente direzione e verso (mentre la coordinata r viene a
coincidere con il modulo del vettore).
Z
P1
P
θ
Y
O
ϕ
X
Fig. 2.3.2: I parametri θ e ϕ determinano direzione e verso del vettore (P1 − P ).
L’utilità del concetto di vettore–spostamento diventa evidente se consideriamo questa situazione:
supponiamo di essere inizialmente nel punto P e di compiere uno spostamento (P1 − P) e quindi
da P1 uno spostamento (P2 − P1 ) arrivando in P2 .
Alternativamente, avremmo potuto effettuare prima uno spostamento (P3 − P) con lo stesso
modulo, direzione e verso di (P2 − P1 ) e quindi uno spostamento da P3 con lo stesso modulo,
direzione e verso di (P1 − P). In questo modo saremmo arrivati allo stesso punto finale P2 . Da
questo possiamo ricavare due considerazioni:
a. Eseguendo spostamenti dello stesso modulo e direzione in ordine diverso il risultato finale non
cambia.
b. La successione dei due spostamenti è equivalente a un unico spostamento (P2 − P). Risulta
logico considerare il vettore (P2 − P) come somma dei vettori (P1 − P) e (P2 − P1 ). Possiamo
introdurre quindi in questo modo il concetto di somma di due vettori.
La nostra definizione di somma di vettori giustifica il formalismo scelto per indicare i vettori–
spostamento. Se infatti trattiamo le indicazioni dei punti come se fossero semplici entità algebriche,
27
2.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Z
P2
P3
O
P1
P
Y
X
Fig. 2.3.3: La somma di due spostamenti non dipende dall’ordine dei medesimi e obbedisce alla
regola del parallelogrammo.
operando su di esse, arriviamo a un risultato corretto:3
/1 − P + P2 − P
/1 ) = (P2 − P)
(P1 − P) + (P2 − P1 ) = (P
(2.3.4)
2.4 Proprietà dei vettori
Abbiamo introdotto il concetto di vettore attraverso il caso particolare dei vettori–posizione e
spostamento, ma esso si applica a molte altre grandezze fisiche. Per questo facciamo adesso una
rassegna delle proprietà più importanti dei vettori.
2.4.1 Vettori e scalari
Chiamiamo grandezza fisica vettoriale una grandezza alla quale si associa, oltre che una intensità, anche una direzione e un verso. In fisica esistono molte grandezze di questo genere, che
quindi possono essere rappresentate convenientemente da vettori. Fra esse vedremo, ad esempio,
in meccanica velocità, accelerazione, forza, in elettrologia i campi elettrico e magnetico.
Le grandezze invece che sono espresse da un singolo valore che ne dà l’intensità, ma non sono
associate a una direzione nello spazio, vengono chiamate scalari. Esempi di grandezze scalari sono
il tempo4 , la massa, la temperatura, la carica elettrica. Una grandezza scalare si può chiamare
anche semplicemente “uno scalare”, per analogia con “un vettore”.
2.4.2 Convenzioni di scrittura
Le grandezze vettoriali vengono indicate nelle formule in modo particolare, affinché ne risalti la
natura diversa da quella degli scalari:
a. Nei testi stampati, come questa dispensa, le grandezze vettoriali sono indicate di norma in
3
4
Questa analogia, che facilita i calcoli di somme di vettori–spostamento e posizione, può essere sfruttata solo quando
il risultato “algebrico” delle operazioni sui punti ha la forma di un vettore.
In meccanica classica: in relatività esso costituisce la quarta dimensione dello “spazio tempo”.
2.4.2
28
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
neretto, mentre gli scalari non lo sono:
v : vettore
s : scalare
(2.4.1)
b. Nei testi manoscritti, nei calcoli fatti a mano su un foglio di carta o alla lavagna i vettori
si indicano con una piccola freccia sovrapposta al simbolo: �v , o, più semplicemente, con la
sottolineatura: v. È importante, soprattutto per chi si trova in fase di studio, riportare sempre
nelle formule la caratteristica vettoriale degli elementi.
Dovendo riportare in un grafico una grandezza vettoriale che non sia la posizione o uno spostamento, si disegnerà una freccia con lunghezza proporzionale al modulo del vettore, secondo un
opportuno fattore di scala, con direzione e verso corretti e partente dal punto dove la grandezza
vettoriale è localizzata o applicata5 .
2.4.3 Vettori e componenti
Un vettore può essere espresso attraverso le sue componenti cartesiane, che di norma si indicano
utilizzando in pedice il nome dell’asse:
v ≡ (vx , vy , vz )
(2.4.2)
Data una grandezza fisica vettoriale, il valore delle sue componenti dipenderà dal sistema di riferimento scelto (in particolare, dalla direzione scelta per gli assi. Le componenti saranno le stesse
in due sistemi aventi gli assi corrispondenti paralleli fra loro). Il modulo di un vettore si indica col
simbolo |v| è dato in termini di componenti da (vedi (2.3.3)):
|v| =
�
vx2 + vy2 + vz2
(2.4.3)
Esso risulta uguale in tutti i sistemi di riferimento.
2.4.4 Somma di vettori
In 2.3 abbiamo introdotto il concetto di somma di vettori attraverso la “regola del parallelogrammo”. Ne approfondiamo qui le proprietà.
Se proiettiamo nel piano X, Y i vettori della fig. 2.3.3 vediamo immediatamente che sommare
due vettori comporta sommare le componenti omologhe
Dalla fig. 2.4.1 la proprietà è evidente per le componenti x e y, ma potremmo proiettare i vettori
nel piano Y, Z o Z, X, verificando che essa vale anche per la terza componente. Abbiamo quindi
in generale:
v1 ≡ (v1x , v1y , v1z ) , v2 ≡ (v2x , v2y , v2z ) , v = v1 + v2 ⇒ v ≡ (v1x + v2x , v1y + v2y , v1z + v2z )
(2.4.4)
A questo punto è utile introdurre il concetto di vettore nullo: un vettore nullo ha modulo nullo
e quindi ha nulle tutte le componenti (l’annullamento del modulo implica che le componenti siano
5
Sul concetto di vettore applicato si veda oltre, dove si parla di forze.
29
2.4.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Y
v2y
v1y
v1x
v2x
X
Fig. 2.4.1: Il vettore risultante dalla somma di due vettori ha come componenti la somma delle loro
componenti.
nulle in qualsiasi sistema di riferimento). Un vettore nullo non ha direzione né verso, per cui risulta
indistinguibile da uno scalare nullo.
L’operazione di somma sui numeri porta con sé il concetto di opposto, che possiamo estendere ai
vettori: il vettore opposto di un vettore v è quel vettore, che chiameremo −v, tale che v+(−v) = 0.
Dalla (2.4.4) risulta immediatamente che
v ≡ (vx , vy , vz ) ⇒ −v ≡ (−vx , −vy , −vz )
(2.4.5)
In termini di modulo, direzione e verso il vettore opposto a un vettore dato ha lo stesso modulo,
mentre gli angoli che definiscono direzione e verso cambiano: θ → π − θ, φ → π + φ.
Il concetto di vettore opposto ci consente di definire la differenza di vettori:
v1 − v2 = v1 + (−v2 )
(2.4.6)
Diamo infine le proprietà della somma di vettori:
a. proprietà commutativa: a + b = b + a
b. proprietà associativa: (a + b) + c = a + (b + c).
Da queste proprietà e dalla (2.4.5) discende la possibilità di definire la somma algebrica di vettori
come una successione di somme e sottrazioni (ad esempio: a + b − c + d . . .) che possono essere
eseguite in qualsiasi ordine, come avviene per gli scalari.
2.4.5 Moltiplicazione di un vettore per uno scalare
Possiamo definire l’operazione di moltiplicazione di un vettore v per uno scalare s, indicata da
s v, come l’operazione in cui ciascuna delle componenti di v viene moltiplicata per s.
v ≡ (vx , vy , vz )
⇒
s v ≡ (s vx , s vy , s vz )
(2.4.7)
Corrispondentemente, il modulo del vettore risultante è il prodotto del modulo di v per il valore
2.4.5
30
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
assoluto di s:
|s v| = |s| |v|
(2.4.8)
La moltiplicazione per uno scalare non altera la direzione di un vettore, ma se lo scalare è negativo
il verso del vettore viene rovesciato.
2.4.6 Versori, versori degli assi
Si chiama versore un vettore di modulo unitario. Un versore contiene informazione relativa
soltanto alla direzione e al verso e viene usato solitamente moltiplicato per uno scalare in modo da
formare un vettore in cui l’informazione d’intensità e quella direzionale sono chiaramente separate.
I versori si indicano come i vettori, ma in alcuni testi, per identificarli meglio, si usa il simbolo ˆ:
û.
Hanno particolare rilevanza i tre versori diretti come i tre assi cartesiani del sistema di riferimento. Convenzionalmente, i versori corrispondenti agli assi X, Y e Z sono chiamati i, j, k.
Z
k
O
j
Y
i
X
Fig. 2.4.2: I versori dei tre assi.
I versori degli assi permettono di esprimere un qualsiasi vettore esplicitamente in funzione delle
sue componenti, e risultano molto utili nelle operazioni di calcolo vettoriale.
v = vx i + vy j + vz k
(2.4.9)
2.4.7 Prodotto scalare
Il prodotto scalare è un’operazione fra due vettori che ha per risultato uno scalare e risulta utile,
come vedremo, in diversi campi della fisica. Il prodotto scalare fra un vettore a e un vettore b si
indica con la notazione a · b ed è definito come il prodotto dei rispettivi moduli moltiplicato per il
coseno dell’angolo fra i due vettori6
a · b = |a| |b| cos α
6
(2.4.10)
Dei due possibili angoli, a somma 2π, si considera sempre quello minore, per cui l’angolo α fra i vettori risulta
sempre 0 ≤ α ≤ π.
31
2.4.7
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Il prodotto scalare gode delle proprietà:
a. Proprietà commutativa: a · b = b · a.
b. Proprietà distributiva rispetto alla somma: a · (b + c) = a · b + a · c.
Un caso interessante di prodotto scalare è quello del prodotto fra i versori degli assi: il prodotto
di un versore con se stesso dà risultato 1 e il prodotto di versori diversi 0: i · i = j · j = k · k = 1,
i · j = j · k = k · i = 0.
Sfruttando la proprietà b. e esprimendo i vettori in funzione delle componenti e dei versori degli
assi come nella (2.4.9) si arriva al risultato
a · b = ax bx + ay by + az bz
(2.4.11)
Ossia, si ottiene il prodotto scalare di due vettori sommando fra loro i prodotti delle componenti
omologhe.
Segnaliamo infine un’identità che ci sarà utile nel seguito, ossia il fatto che il prodotto scalare
di un vettore con se stesso corrisponde al modulo quadrato del medesimo
v · v = |v|2
(2.4.12)
2.4.8 Prodotto vettoriale
Fra due vettori è definito anche un altro tipo di prodotto, il prodotto vettoriale, che produce
come risultato un vettore. Si indica con il simbolo7 × e si calcola con le regole seguenti:
a. Il modulo del vettore risultante dal prodotto vettoriale a × b è dato dal prodotto dei moduli dei
due vettori moltiplicato per il seno dell’angolo fra i medesimi
|a × b| = |a| |b| sin α
(2.4.13)
b. La direzione del vettore risultante è perpendicolare al piano formato dai due vettori8
c. Il verso del vettore risultante è tale che se si guardano i vettori di partenza dalla sua “punta
di freccia” si vede che per ruotare il primo vettore e portarlo sul secondo si deve compiere una
rotazione in senso antiorario.
Il prodotto vettoriale gode delle seguenti proprietà:
a. È anticommutativo: a × b = −b × a.
b. Proprietà distributiva rispetto alla somma: a × (b + c) = a × b + a × c.
Anche in questo caso è importante vedere quale risultato si ha calcolando il prodotto vettoriale
fra i versori degli assi. Con le regole date sopra si trova facilmente:
i×i=j×j=k×k=0
i×j=k
j×k=i
j × i = −k
k × j = −i
7
8
k×i=j
i × k = −j
(2.4.14)
In alcuni testi è usato il simbolo ∧.
Nel caso di vettori paralleli o antiparalleli il piano non è definito, ma il modulo del vettore risultante è nullo, per
cui non si pone il problema della direzione.
2.4.8
32
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
c
Z
b
α
a
Y
O
X
Fig. 2.4.3: Il prodotto vettoriale a×b: il vettore risultante c è perpendicolare al piano formato
dagli altri due e l’osservatore che guarda verso la sua “freccia” vede che il primo vettore (a) dovrebbe
ruotare in senso antiorario per sovrapporsi al secondo (b). Un osservatore che guardasse dal lato opposto
vedrebbe una rotazione in senso orario.
Ossia, il prodotto vettoriale di due versori degli assi è nullo se questi coincidono e se sono diversi
corrisponde al terzo versore, con segno che dipende dall’ordine dei primi due. Questo risultato si
sintetizza nel modo seguente: si considerino i versori degli assi in una sequenza ciclica i → j →
k → i . . ..
i
j
k
Fig. 2.4.4: La sequenza ciclica dei versori degli assi per il calcolo del prodotto vettoriale.
Se facciamo il prodotto vettoriale fra due versori contigui secondo la sequenza, otterremo il terzo
versore con segno “+”, se i versori sono nell’ordine opposto alla sequenza, il risultato avrà segno
“−”.
Conoscendo i prodotti vettoriali fra i versori degli assi e sfruttando la proprietà distributiva b.
possiamo calcolare a × b in componenti
a × b = (ax i + ay j + az k) × (bx i + by j + bz k) =
= (ay bz − az by ) i + (az bx − ax bz ) j + (ax by − ay bx ) k
Un modo di sintetizzare la (2.4.15) è considerare il
minante:
�
� i
�
a × b = �� ax
� bx
(2.4.15)
prodotto vettoriale come il risultato del deterj
ay
by
�
k ��
az ��
bz �
(2.4.16)
Che può essere calcolato con la regola di Sarrus. Da un punto di vista pratico, si sconsiglia agli
studenti di imparare a memoria il risultato della (2.4.15) ma piuttosto si consiglia di effettuare il
calcolo volta per volta a partire dalle componenti e dai versori.
33
2.4.8
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
2.4.9 Composizione di prodotti vettoriali
Completiamo la sezione sui vettori considerando le due combinazioni di prodotti di vettori che
capitano non infrequentemente in fisica:
a. Prodotto misto. Ha la forma a · b × c e ha come risultato uno scalare. I prodotto misto può
essere eseguito solo calcolando prima il prodotto vettoriale e poi quello scalare, e il risultato si può
interpretare geometricamente come il volume del parallelepipedo (in generale non rettangolo)
che ha i tre vettori come spigoli uniti in un vertice. Il volume è dato con segno positivo o negativo
a seconda che il risultato del prodotto vettoriale b × c si trovi nel semispazio che contiene a o
meno, fra i due suddivisi dal piano contenente b e c.
a
c
b
Fig. 2.4.5: Interpretazione del prodotto misto a · b × c come volume di un parallelepipedo.
Il prodotto misto gode delle seguenti proprietà:
• a · b × c = b · c × a = c · a × b. Il risultato non cambia se si cambiano di posto i vettori
nell’espressione, mantenendo l’ordine ciclico. Se si scambiano fra loro due vettori, il prodotto
cambia segno.
• a · b × c = a × b · c. Il risultato non cambia se si scambiano fra loro gli operatori del prodotto
scalare e vettoriale.
b. Doppio prodotto vettoriale. Ha la forma a × (b × c). Le sue proprietà sono:
• Non è associativo: a × (b × c) �= (a × b) × c
• Si può calcolare sfruttando l’identità a × (b × c) = (a · c) b − (a · b) c.
2.4.10 Derivate e integrali di vettori
L’operazione di derivazione di un vettore viene eseguita sulle varie componenti. Se un vettore
v ha le componenti vx , vy e vz funzione di un parametro scalare p avremo:
v = vx (p) i + vy (p) j + vz (p) k
⇒
dv
dvx
dvy
dvz
=
i+
j+
k
dp
dp
dp
dp
(2.4.17)
La (2.4.17) vale se i versori degli assi sono costanti o comunque non dipendono dal parametro p.
Nel caso in cui questo accada, si applica la normale regola sulla derivata di un prodotto
v = vx (p) i(p) + vy (p) j(p) + vz (p) k(p) ⇒
dv
dvx
dvy
dvz
di
dj
dk
⇒
=
i+
j+
k + vx
+ vy
+ vz
dp
dp
dp
dp
dp
dp
dp
(2.4.18)
dove la derivata dei vettori (in pratica, ci troveremo a calcolare solo la derivata di un versore
rispetto al tempo) sarà vista in dettaglio più sotto.
2.4.10
34
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Integrali contenenti vettori compariranno in diverse forme e saranno trattati di caso in caso; in
generale valgono sempre le normali regole dell’algebra.
2.5 Descrizione del moto mediante i vettori posizione e spostamento
In 2.2 siamo giunti alla conclusione che il moto di un punto P è completamente determinato
dalla conoscenza in funzione del tempo delle sue coordinate. Il vettore posizione (P − O) si può
esprimere nella forma (2.4.9) come
(P − O) = x i + y j + z k
(2.5.1)
Quindi, la conoscenza di (P − O)(t) descrive completamente il moto.
Z
a)
Z
P2
b)
P2
P
Y
O
Y
P1
P1
O
X
X
Fig. 2.5.1: a) Moto di un punto P lungo una traiettoria da P1 a P2 . b) Il moto visto come successione di spostamenti infinitesimi (ovviamente rappresentati come finiti per necessità di visualizzazione
grafica).
Consideriamo (vedi fig. 2.5.1a) un punto P che si muove lungo una traiettoria. Supponiamo
che al tempo t1 esso si trovi nella posizione P1 e al tempo t2 nella posizione P2 . Nel tempo che
intercorre fra t1 e t2 il punto compie uno spostamento (P2 − P1 ). Questo vettore spostamento ci
informa sul punto di partenza e di arrivo, ma non ci dà una descrizione completa del moto, dato
che non contiene alcuna informazione su tutto ciò che avviene fra t1 e t2 , in particolare sull’effettiva
traiettoria percorsa dal punto P. Se però suddividiamo il moto da P1 a P2 in tanti spostamenti
consecutivi, come in fig. 2.5.1b, vediamo che questi danno una descrizione ancora approssimata,
ma più precisa, del moto. Se facciamo tendere a infinito il numero degli spostamenti, mentre
il loro modulo tende a 0, e supponiamo di conoscere il tempo t corrispondente all’inizio di ogni
spostamento, avremo una descrizione del moto precisa sia per quanto riguarda la traiettoria che il
tempo. Da un punto di vista matematico questo si può esprimere come
(P2 − O) = (P1 − O) +
�
t2
dP
(2.5.2)
t1
dove l’integrale rappresenta la somma vettoriale di un numero infinito di spostamenti infinitesimi
dP consecutivi.
35
2.5
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
È da notare che via via che riduciamo l’ampiezza dei vettori spostamento, i rispettivi punti
iniziali e finali sulla traiettoria si avvicinano e conseguentemente la direzione dello spostamento infinitesimo risulta tangente alla traiettoria nel punto iniziale (e, a meno di una distanza infinitesima,
anche finale) dello spostamento.9
2.6 Definizione di velocità
Tornando al moto della sezione precedente, supponiamo che un osservatore abbia piazzato degli
apparecchi capaci di rilevare la posizione del punto P nello spazio a un certo istante di tempo
(possiamo pensare a macchine fotografiche che scattano istantanee), dispositivi, questo è un punto
molto importante, fissi rispetto al sistema di riferimento. Usando un cronometro e scattando foto
al tempo t1 e successivamente al tempo t2 potrà determinare le posizioni corrispondenti di P.
Attraverso queste misure dirette è possibile costruire una nuova grandezza fisica vettoriale che
chiamiamo velocità media
vm,(t1 ,t2 ) =
(P2 − P1 )
[(P − O)(t2 ) − (P − O)(t1 )]
=
t2 − t1
t2 − t1
(2.6.1)
Analogamente al vettore spostamento finito discusso in 2.5, il vettore velocità media dà dell’informazione che però non permette di conoscere il moto nei suoi particolari. Se chiamiamo
∆t = t2 − t1 l’intervallo di tempo fra la prima e la seconda determinazione della posizione di P (in
pratica, l’intervallo di tempo fra le fotografie), possiamo definire la velocità all’istante t1 come
v(t1 ) = lim
∆t→0
[(P − O)(t1 + ∆t) − (P − O)(t1 )]
dP
=
∆t
dt
(2.6.2)
Il vettore velocità è quindi definito come rapporto fra il vettore spostamento infinitesimo e l’intervallo di tempo infinitesimo in cui avviene. Questo rapporto costituisce la derivata del vettore
posizione rispetto al tempo. Per quanto scritto in 2.5 la direzione della velocità risulta tangente
alla traiettoria. Dalla (2.6.2) risulta anche che se a un certo istante conosciamo la velocità v
e vogliamo sapere quale sarà lo spostamento del punto dopo un tempo infinitesimo dt potremo
scrivere semplicemente
dP = v dt
(2.6.3)
Corrispondentemente, la (2.5.2) può essere scritta come
(P2 − O) = (P1 − O) +
�
t2
(2.6.4)
v(t) dt
t1
Questa equazione stabilisce il fatto che se noi conosciamo la posizione del punto mobile P all’istante
t1 e la sua velocità in funzione del tempo (in generale v non sarà costante!) potremo ricavare la
posizione di P a qualsiasi tempo successivo.
Vogliamo infine richiamare l’attenzione su due punti importanti:
9
La retta tangente a una curva in un punto A è definita come il limite delle rette secanti la curva in
ulteriore punto B quando facciamo avvicinare B fino a coincidere al limite con A.
2.6
36
A
e in un
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
a. Un vettore spostamento o velocità cambia le sue componenti a seconda del sistema di riferimento
usato, ma mantiene invariato il suo significato fisico se consideriamo sistemi diversi fra loro in
quiete10 : se ad esempio prendete la cartina di una città e tracciate un vettore spostamento
fra due monumenti, il vettore avrà determinate componenti se considerate un sistema di assi
(X, Y ) diretti verso est e verso nord, rispettivamente. Se ora considerate un altro sistema
di assi, (X � , Y � )diretti rispettivamente verso NE e NO, il vettore avrà altre componenti, ma
rappresenterà lo stesso spostamento fisico e avrà, ovviamente, lo stesso modulo.
Y
Y'
P1
X'
P2
X
Fig. 2.6.1: Il vettore spostamento fra due punti ha componenti diverse se rappresentato in due
sistemi di riferimento, ma mantiene inalterato il suo significato fisico.
Se invece consideriamo sistemi di riferimento diversi in moto fra loro i vettori spostamento e
velocità risultano intrinsecamente diversi:
Y
Y'
O'
S'
S
P
X
O
X'
Fig. 2.6.2: Gli spostamenti e le velocità del passeggero P che cammina sul carro sono misurati con
risultato diverso dallo sperimentatore sul carro S e quello a terra S’.
Nel disegno di figura 2.6.2 la locomotiva si sta spostando verso destra trainando un carro lungo
un binario rettilineo. Il passeggero P sta camminando sul carro in direzione della locomotiva.
Uno sperimentatore S si trova fermo sul carro e misura la posizione di P rispetto a un sistema
10
Come vedremo meglio nel seguito, un sistema OXY risulta in quiete rispetto ad un altro O� X � Y � se tre punti fissi
in OXY e non allineati risultano fissi anche in O� X � Y � .
37
2.6
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
di riferimento OXY solidale col carro. Egli troverà che P, ad esempio, si è spostato in direzione
X di 1 m in 1 s. Contemporaneamente lo sperimentatore S� si trova fermo a terra e misura la
posizione di P rispetto a un sistema di riferimento O� X � Y � che ha gli assi paralleli a OXY ma
è solidale col terreno. S� vede P muoversi più velocemente, in funzione di come si sta muovendo
la locomotiva: per esempio, vede che P si è spostato, nello stesso intervallo di 1 s, di 11 m in
direzione X � . Se S� misura anche gli spostamenti di S, che sta fermo sul carro, troverà che nello
stesso secondo S si è spostato di 10 m, trainato col carro dalla locomotiva. In termini di velocità,
P avrà una velocità di vx = 1 m · s−1 per l’osservatore S, e una velocità vx� = 11 m · s−1 per
S� . La relazione che intercorre in meccanica classica fra le velocità misurate in diversi sistemi di
riferimento è detta relatività galileiana. Nell’esempio che abbiamo fatto gli assi dei due sistemi si
mantengono paralleli e la relazione risulta semplice ed immediata; nel seguito studieremo anche
i casi più complessi.
b. La grandezza fisica velocità come è stata definita in forma vettoriale è quella che viene usata
in meccanica, ma non è la sola possibile definizione di velocità. Nella lingua inglese è chiamata
velocity, mentre con il termine speed si indica una grandezza scalare che pure ha applicazione
nella vita di tutti i giorni. Non esistendo una differenza di termini analoga nella lingua italiana,
nel seguito di questa sezione useremo il termine celerità per indicare questo concetto. In pratica,
la celerità è la quantità che viene indicata dal tachimetro delle automobili. Essa non è basata sul
vettore spostamento, ma sulla distanza percorsa in un certo tempo (quantità che a sua volta è
misurata dal contachilometri delle auto). Supponiamo che nell’intervallo infinitesimo dt il punto
studiato compia uno spostamento dP = dx i + dy j + dz k. La sua velocità, coerentemente con
la (2.6.2), è data da
v=
dP
dx
dy
dz
=
i+
j+
k
dt
dt
dt
dt
(2.6.5)
La celerità è data invece da
|dP|
dl
vc =
=
=
dt
dt
�
dx2 + dy 2 + dz 2
dt
(2.6.6)
Allo stesso modo, la celerità media è data dal rapporto fra la lunghezza percorsa sulla traiettoria
(quella segnata dal contachilometri) e il tempo impiegato. La differenza si capisce immediatamente con un esempio: una vettura di formula 1 che completa un gran premio percorre sul
circuito un totale di 300 km in un tempo che può essere, ad esempio, di un’ora e mezza. La sua
celerità media risulta pari a 200 km/h. La sua velocità media, data dalla (2.6.1) risulta invece
nulla, dato che (se trascuriamo la piccola distanza dalla postazione di partenza e la linea di arrivo) l’auto ha compiuto un certo numero di giri del circuito ed è tornata al punto di partenza,
con un vettore spostamento nullo.
2.7 Accelerazione
L’accelerazione è un vettore definito a partire dalla velocità. Un osservatore misura, rispetto a
un sistema di riferimento, la velocità di un punto P all’istante t e all’istante t + ∆t. Si definisce
l’accelerazione media come il rapporto [v(t + ∆t) − v(t)]/∆t. Andando al limite per ∆t → 0
otteniamo l’accelerazione all’istante t:
a(t) = lim
∆t→0
2.7
v(t + ∆t) − v(t)
dv
=
∆t
dt
38
(2.7.1)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
L’accelerazione è definita quindi come la derivata temporale della velocità. Essa è un concetto
già noto nella vita quotidiana, ma in meccanica classica assume una importanza particolare, dato
che entra nell’equazione fondamentale della dinamica. Analogamente, si potrebbero definire anche
una grandezza fisica data dalla derivata temporale dell’accelerazione e cosı̀ via altre grandezze per
derivazione successiva, ma non avrebbero particolare rilevanza nello studio del moto.
2.7.1 Velocità e accelerazione in componenti intrinseche
In 2.6 abbiamo sottolineato il fatto che il vettore velocità risulta sempre tangente alla traiettoria.
Questo può essere scritto nella forma
v = vt
(2.7.2)
dove t è il versore tangente punto per punto alla traiettoria e v rappresenta l’intensità della velocità
(formalmente, la componente di v secondo il versore t, che risulta sempre positiva, o tuttalpiù
nulla, dato che il verso di t è quello di percorrenza della traiettoria). Per l’accelerazione il discorso
è lievemente più complesso. Prima di tutto dobbiamo enunciare una proprietà delle linee curve
nello spazio.
C
ρ
n
P''
P
t
P'
Fig. 2.7.1: Per una linea curva nello spazio è definito in ogni punto un piano di giacenza e un raggio
di curvatura ρ.
Supponiamo di avere una tale linea e consideriamo un suo punto P. Consideriamo anche due
punti P� e P�� pure essi sulla linea. Se questa non ha andamento rettilineo nel tratto che li contiene,
in generale i tre punti non saranno allineati. Per tre punti non allineati passa uno e un solo piano
e, in tale piano, una e una sola circonferenza. Se avviciniamo ora i punti P� e P�� a P, al limite in
cui la loro distanza da P tende a zero, il piano che essi definiscono costituisce il piano di giacenza
della traiettoria nel punto P e il cerchio passante per essi è il cerchio osculatore, mentre il suo
raggio definisce il raggio di curvatura della linea in corrispondenza di P. Il versore n nel piano di
giacenza, perpendicolare al versore t tangente alla linea e puntato verso il centro C del cerchio
osculatore, è il versore normale alla traiettoria.
Si noti che l’orientazione del piano di giacenza e il raggio di curvatura variano in generale da
punto a punto sulla linea. Nel caso particolare in cui la linea nell’intorno di P è una retta, non
è possibile definire univocamente un piano di giacenza (esistono infiniti piani che passano per tre
punti allineati), mentre si può pensare che il raggio di curvatura tenda a infinito.11
Consideriamo adesso la fig. 2.7.2, che rappresenta, nel piano di giacenza, un tratto infinitesimo di traiettoria AB (che, per necessità di visualizzazione, è rappresentato da un tratto finito)
11
Se la traiettoria è espressa in forma parametrica come nella (2.2.2) in funzione di un parametro p, si può dimostrare
39
2.7.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
approssimato, secondo quanto sopra, con il cerchio osculatore di centro C e raggio ρ. A è la posizione del punto in moto all’istante t e corrispondentemente è disegnato il vettore v(t), tangente
alla traiettoria. B rappresenta la posizione del punto all’istante t + dt, con la sua nuova velocità
v(t + dt) che ha cambiato direzione, dovendo restare tangente alla traiettoria, e modulo.
C
dθ
ρ
dt)
t+
v(
A
v(t)
t)
+d
t
(
t dθ
v(t)
//
dv
dθ
B
n(t)
dv
dt
t(t)
Fig. 2.7.2: L’accelerazione si scompone in una componente tangenziale, legata alla variazione di
modulo, e una componente normale, dovuta alla variazione di direzione.
.
Nel punto B è stata riportata anche v(t), e la differenza fra le due velocità è scomposta nella
somma di due vettori dv// e dv⊥ . In figura è rappresentato anche l’angolo infinitesimo dθ fra
le direzioni delle velocità ai tempi t e t + dt. A parte sono disegnati il versore t(t) tangente alla
traiettoria in A e il versore t(t + dt), tangente in B. Anche i due versori formano fra loro un angolo
dθ. Risulta anche evidente che dθ corrisponde all’angolo sotteso dall’arco di circonferenza AB.
In figura l’angolo dθ è disegnato finito, ma se lo immaginiamo tendente a 0 vediamo che sia
il vettore dt che la componente dv⊥ tendono a diventare perpendicolari a t(t) e diretti come il
vettore normale alla traiettoria n(t), che punta verso il centro del cerchio osculatore.
Consideriamo adesso la velocità espressa come v = v t, possiamo scrivere l’accelerazione, sua
derivata temporale, come (vedi (2.4.18))
a(t) =
dv
dv
dt
=
t+v
dt
dt
dt
(2.7.3)
che il raggio di curvatura in un determinato punto è dato da
ρ=
�
�
2
2
x� + y � + z �
2
� 32
(y � z �� − z � y �� )2 + (z � x�� − x� z �� )2 + (x� y �� − y � x�� )2
dove x� = dx/dp, x�� = d2 x/dp2 e analogamente per le altre coordinate. Nel caso la traiettoria giaccia in un piano
XY e sia espressa tramite la relazione y = f (x) il raggio di curvatura è espresso da
2 3
ρ=
(1 + y � ) 2
|y �� |
dove y � = dy/dx e y �� = d2 y/dx2 .
2.7.1
40
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Dalla figura vediamo che il triangolo isoscele formato da i versori t(t), t(t + dt) e dt è simile al
triangolo ABC, per cui vale la proporzione
|dt|
AB
=
|t|
ρ
⇒
|dt| =
AB
ρ
(2.7.4)
(nel secondo passaggio si è sfruttato il fatto che |t| = 1). Il fatto che dθ sia infinitesimo ci autorizza
a considerare uguali la lunghezza del segmento AB e quella dell’arco di traiettoria. Quest’ultima è
la distanza percorsa nell’intervallo infinitesimo dt e vale, a meno di infinitesimi di ordine superiore,
v dt. Segue che
|dt| =
v dt
ρ
⇒
dt
v
= n
dt
ρ
(2.7.5)
Inserendo nella (2.7.3) il risultato della (2.7.5) abbiamo infine
a=
dv
dv
v2
=
t+
n
dt
dt
ρ
(2.7.6)
Vediamo quindi che, su una traiettoria curva, il vettore accelerazione si scompone in una parte
tangenziale, diretta come la velocità (in direzione, ma non necessariamente in verso, dato che dv/dt
può essere negativo), e in una parte normale, nel piano di giacenza della traiettoria e puntata verso
l’interno della curva. L’accelerazione tangenziale è data dalla derivata temporale dell’intensità
della velocità, mentre quella normale corrisponde al quadrato della velocità diviso per il raggio di
curvatura della traiettoria nel punto.
Di questo risultato abbiamo un esempio nella vita di tutti i giorni quando ci troviamo dentro
un’automobile. Se in rettilineo premiamo l’acceleratore o il freno modifichiamo la celerità, come
vediamo dall’indicazione del tachimetro, e quindi l’intensità della velocità. Contemporaneamente
ci sentiamo spinti verso lo schienale del sedile o verso l’anteriore della vettura. Se invece percorriamo una curva mantenendo costante l’indicazione tachimetrica ci sentiamo spinti verso l’esterno
della curva. Queste spinte, che sono forze, sono direttamente legate, come vedremo oltre, alle
accelerazioni tangenziali e normali a cui la vettura è soggetta.
2.7.2 Tipi possibili di traiettoria
Nel parlare della traiettoria di un punto che si muove abbiamo considerato sempre in generale
delle linee curve continue. Le caratteristiche fisiche del moto impongono dei limiti alle possibili
traiettorie, visualizzati in fig. 2.7.3.
a)
A
P
B
b)
c)
C
D
P
P
E
Fig. 2.7.3: Esempi di moti permessi o proibiti dalle leggi della meccanica classica.
41
2.7.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
In a) abbiamo un moto in cui il punto arriva in un certo istante al punto A e all’istante
immediatamente successivo si trova in B, a una distanza finita da A. Questo moto implicherebbe
una velocità infinita e non è considerato possibile dalla meccanica classica.
Nell’esempio b) abbiamo una traiettoria che presenta un punto angoloso in C: se il punto
che si muove ci arriva con velocità finita, questa dovrebbe cambiare istantaneamente direzione
al passaggio per C, quindi con accelerazione infinita. Un simile comportamento è considerato in
meccanica classica in due casi:
1. Il punto materiale sta rallentando e arriva in C con velocità nulla, quindi riparte. In questo
caso non abbiamo una variazione finita del vettore velocità in un tempo infinitesimo.
2. Il punto materiale arriva in C e subisce un urto. Gli urti sono fenomeni che verranno studiati
nel seguito, in cui si producono accelerazioni estremamente alte, tanto che nel loro studio si
possono considerare, in buona approssimazione, cambiamenti finiti e istantanei della velocità.
Infine in c) è rappresentato il moto oscillatorio di un punto che “fa la spola” fra D e E. Questo
è un caso particolare di b) ed è assolutamente permesso, ed anzi piuttosto comune, a patto che il
punto arrivi in D e E con velocità nulla. In D l’accelerazione sarà diretta verso destra e in E verso
sinistra.
2.8 Moti vincolati e gradi di libertà
In generale non è possibile conoscere a priori quale traiettoria percorrerà un punto che si muove
nello spazio. In tal caso il moto sarà determinato dalla conoscenza delle sue 3 coordinate, in
funzione del tempo, come in (2.1.3). Potremmo scegliere di studiare il moto in coordinate cilindriche
o sferiche, ma in ogni caso dovremmo conoscere l’andamento temporale di 3 parametri scalari
indipendenti. Esprimiamo questo concetto dicendo che un punto che si muove liberamente (vedi
sotto) nello spazio ha 3 gradi di libertà. Il numero di gradi di libertà di un punto (o di un sistema
di punti) è per definizione il numero di parametri scalari indipendenti che occorre conoscere in
funzione del tempo per determinarne il moto.
Tuttavia in molti casi esistono dei limiti fisici, detti in generale vincoli, che confinano il moto
del nostro punto in un sottospazio. In questo caso i gradi di libertà del punto diventano meno
di 3. Ad esempio, consideriamo un moto confinato nel piano XY : in questo caso avremo sempre
z = 0 e il moto sarà determinato da due soli gradi di libertà, ossia le coordinate x e y. Se invece
avessimo un moto confinato sulla superficie di una sfera centrata nell’origine degli assi, avremmo
ancora due gradi di libertà, che sarebbero espressi convenientemente dalle coordinate sferiche θ e
ϕ, mentre il raggio r rimarrebbe fisso. Avremo in generale due soli gradi di libertà quando il moto
del punto è confinato su una superficie.
Un confinamento ancora più ristretto si ha se il punto può muoversi soltanto lungo una linea
predeterminata, espressa ad esempio parametricamente come in (2.2.2). In questo caso, come già
accennato, avremo un solo grado di libertà, rappresentato dal parametro p. Se togliessimo ancora
un grado di libertà il punto sarebbe costretto a rimanere fisso in una posizione.
In ogni situazione, la posizione del punto è determinata dall’andamento temporale dei parametri
che rappresentano i suoi gradi di libertà, mentre la velocità dipende anche dalle loro derivate prime
rispetto al tempo e l’accelerazione anche dalle derivate seconde, sempre rispetto al tempo. Le
derivate rispetto al tempo sono tanto comuni in meccanica, che si è introdotta una notazione più
sintetica e veloce per le medesime, mediante l’uso di punti sovrapposti alla quantità da derivare.
Ad esempio
ẋ ≡
dx
dt
ẍ ≡
d2 x
dt2
(2.8.1)
Un punto sopra una variabile ne indica la derivata prima temporale, due punti la derivata seconda.
2.8
42
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Nello studiare il moto di un punto, occorrerà preventivamente stabilire quanti sono i gradi di
libertà, scegliere i parametri opportuni per rappresentarli, dopo di che le grandezze caratteristiche
del moto si potranno e dovranno esprimere in funzione di questi parametri e delle loro derivate
temporali. Si consiglia fin da ora vivamente lo studente dall’evitare di usare termini generici come
v e a per indicare la velocità e l’accelerazione di un punto in una situazione particolare, ma di
usare piuttosto termini espliciti come ẋ, ϕ̈, ossia derivate temporali dei parametri del moto o loro
funzioni. Questo perché, fatto sperimentalmente ben assodato, l’uso dei termini generici come v ed
a porta lo studente meno attento a pensare che si tratti di quantità costanti nel tempo e a trattarle
erroneamente come tali mentre in generale non lo sono.
Nel seguito diamo due esempi di descrizione di moti vincolati tramite i gradi di libertà.
2.8.1 Moto circolare
Vogliamo descrivere il moto di un punto P che si muove nel piano XY ed è vincolato a spostarsi
su una circonferenza centrata nell’origine O di raggio R.
a)
b)
Y
t u
n P
O
ϕ
ϕ
X
t
Y
u
ϕ
X
Fig. 2.8.1: Moto di un punto su una traiettoria circolare. In b) sono evidenziati gli angoli formati
dai versori con gli assi cartesiani.
Il punto ha un solo grado di libertà: la sua posizione può essere determinata dalla conoscenza
dell’angolo ϕ che il vettore posizione (P − O) forma con l’asse X. Osservando anche le (2.1.1)
risulta immediato esprimere il vettore posizione come
(P − O) = x i + y j = R cos ϕ i + R sin ϕ j
(2.8.2)
ossia in funzione del solo parametro variabile ϕ. Corrispondentemente avremo per la velocità e
l’accelerazione
v = −R sin ϕ ϕ̇ i + R cos ϕ ϕ̇ j
a = −R(sin ϕ ϕ̈ + cos ϕ ϕ̇2 ) i + R(cos ϕ ϕ̈ − sin ϕ ϕ̇2 ) j
(2.8.3)
Dall’espressione vettoriale della velocità si ricava immediatamente il modulo: |v| = R |ϕ̇|. Vogliamo
esprimere velocità e accelerazione in componenti intrinseche. Per fare questo partiamo dal versore
u in figura, che è diretto come (P − O). Dalla (2.8.2), considerando che un versore ha modulo
unitario, risulta immediatamente
u = cos ϕ i + sin ϕ j
43
(2.8.4)
2.8.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Il versore tangente alla traiettoria, t, si può ricavare osservando la parte b) della fig. 2.8.1.
t = − sin ϕ i + cos ϕ j
(2.8.5)
Si può verificare immediatamente che u · t = 0, come richiesto dall’ortogonalità dei vettori. Infine,
il versore n, normale alla traiettoria e diretto verso il centro del cerchio osculatore (che nel caso
corrisponde alla traiettoria stessa) si ricava banalmente considerando che n = −u
n = − cos ϕ i − sin ϕ j
(2.8.6)
Possiamo adesso, come esercizio, verificare che v = v t. Calcoliamo la componente di v in direzione
di t come
v · t = (−R sin ϕ ϕ̇ i + R cos ϕ ϕ̇ j) · (− sin ϕ i + cos ϕ j) = R ϕ̇
(2.8.7)
Abbiamo che |v · t| = R |ϕ̇| = |v|, risultato che già prova il fatto che la velocità è diretta secondo
t, ma possiamo verificare che la componente di v perpendicolare a t è nulla
v · n = (−R sin ϕ ϕ̇ i + R cos ϕ ϕ̇ j) · (− cos ϕ i − sin ϕ j) = 0
(2.8.8)
Calcoliamo adesso le componenti tangenziale e normale dell’accelerazione
a · t = [−R(sin ϕ ϕ̈ + cos ϕ ϕ̇2 ) i + R(cos ϕ ϕ̈ − sin ϕ ϕ̇2 ) j] · (− sin ϕ i + cos ϕ j) = R ϕ̈
(2.8.9)
che corrisponde, come deve, alla derivata temporale della (2.8.7). Per l’accelerazione normale
abbiamo
a · n = [−R(sin ϕ ϕ̈ + cos ϕ ϕ̇2 ) i + R(cos ϕ ϕ̈ − sin ϕ ϕ̇2 ) j] · (− cos ϕ i − sin ϕ j) = R ϕ̇2
(2.8.10)
La componente normale dell’accelerazione risulta uguale a v 2 /R. Abbiamo quindi verificato completamente la (2.7.6).
In generale, per un moto circolare abbiamo visto che
1. Il moto si può descrivere mediante un unico parametro, l’angolo ϕ formato dal vettore posizione con l’asse X (andrebbe bene anche se considerassimo l’angolo formato con una qualsiasi
direzione fissa nel sistema di riferimento: cambierebbero le componenti cartesiane di velocità e
accelerazione ma non quelle intrinseche).
2. La velocità è tangenziale alla traiettoria con componente R ϕ̇.
3. l’accelerazione ha una componente tangenziale pari a R ϕ̈ e una normale pari a R ϕ̇2 . Nel caso di
un moto uniforme, con ϕ̇ = cost., non cambia nel tempo il modulo della velocità e l’accelerazione
è diretta verso il centro del cerchio.
2.8.2 Moto lungo una traiettoria parabolica
Vogliamo descrivere adesso il moto di un punto che si sposta in un piano lungo una traiettoria
parabolica espressa dalla funzione y = c x2 , con c > 0 (dato che sia x che y sono lunghezze, dovrà
essere [c] = L−1 )
2.8.2
44
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
a)
b)
Y
Y
dP
n
t
y'dx
dx
P
X
x
X
Fig. 2.8.2: Moto di un punto su una traiettoria parabolica. In b) è illustrato il modo di ricavare
l’espressione del versore tangente alla traiettoria.
Anche in questo caso partiamo dallo scrivere il vettore posizione
(P − O) = x i + y j = x i + c x2 j
(2.8.11)
Risulta naturale esprimere l’unico grado di libertà del moto tramite il parametro x. Determiniamo
in funzione di esso anche velocità e accelerazione
v = ẋ i + 2c x ẋ j
a = ẍ i + (2c x ẍ + 2c ẋ2 ) j
(2.8.12)
Vogliamo esprimere velocità e accelerazione in componenti intrinseche. Per questo dobbiamo ricavare l’espressione dei versori tangente e normale in ogni punto della traiettoria e lo facciamo in
generale per una traiettoria piana descritta da una funzione y = y(x). Possiamo determinare il
versore tangente considerando uno spostamento infinitesimo dP sulla traiettoria, come visualizzato
nella parte b) della fig. 2.8.2. Avremo
dP = dx i + dy j = dx i + y � dx j
(2.8.13)
dove y � = dy/dx e scegliamo il verso dello spostamento per cui dx > 0. Sappiamo che lo spostamento è tangente alla traiettoria (vedi sez. 2.5); per ottenere il versore tangente basterà calcolare
t=
dP
dx i + y � dx j
1
y�
�
�
= �
=
i
+
j
|dP|
1 + y � 2 dx
1 + y� 2
1 + y� 2
(2.8.14)
Una volta note le componenti cartesiane di t, quelle del versore normale n si determinano con lo
stesso metodo evidenziato nella fig. 2.8.1 b)
y�
1
n = −�
i+ �
j
2
�
1+y
1 + y� 2
45
(2.8.15)
2.8.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Per la nostra parabola avremo
1
2cx
t= √
i+ √
j
2
2
1 + 4c x
1 + 4c2 x2
2cx
1
n = −√
i+ √
j
1 + 4c2 x2
1 + 4c2 x2
(2.8.16)
Calcoliamo adesso velocità e accelerazione in componenti intrinseche
v=
�
1 + 4c2 x2 ẋ t
(2.8.17)
che corrisponde al modulo della velocità calcolato dalla (2.8.12). Si ricava anche che v · n = 0. Per
l’accelerazione
�
4c2 x ẋ2
1 + 4c2 x2 ẍ + √
1 + 4c2 x2
2
2c ẋ
a·n= √
1 + 4c2 x2
a·t=
(2.8.18)
Se si deriva la componente di v secondo il suo versore t data dalla (2.8.17) si ricava l’accelerazione
tangenziale data dalla (2.8.18).
2.8.3 Moto piano in coordinate polari
a)
b)
y
du ϕ
dϕ
uϕ
r
O
ϕ
P
uϕ
dϕ
du r
ur
ur
x
Fig. 2.8.3: Moto di un punto su un piano espresso tramite le coordinate polari e i versori corrispondenti. In b) è evidenziato lo schema da cui si ricavano i valori delle derivate temporali dei versori.
Possiamo esprimere la posizione di un punto P che si muove nel piano XY mediante le coordinate
polari r e ϕ. In coordinate polari scomporremo i vettori secondo le direzioni e versi indicati da due
versori: il versore ur che ha la direzione e verso di (P − O) e il versore uϕ che giace nel piano XY ,
è perpendicolare a ur e, visto dalla “punta” dell’asse Z, risulta ruotato di π/2 in senso antiorario
rispetto a ur . Con questo sistema di versori il vettore posizione risulta semplicemente
(P − O) = r ur
2.8.3
46
(2.8.19)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Vogliamo calcolare, sempre rispetto ai versori introdotti, le componenti della velocità e dell’accelerazione di P. Nel derivare rispetto al tempo la (2.8.19) va considerato il fatto che gli stessi
versori ur e uϕ variano in direzione con lo spostarsi del punto. Dalla fig. 2.8.3 b) si vede che se
in un intervallo di tempo infinitesimo dt l’angolo ϕ varia di dϕ, i due vettori variano di quantità
infinitesime rispettivamente dur = dϕ uϕ , duϕ = −dϕ ur . Possiamo quindi scrivere le derivate
temporali dei versori come
u̇r = ϕ̇ uϕ
u̇ϕ = −ϕ̇ ur
(2.8.20)
Avremo quindi per la velocità di P espressa con i nostri versori
vP = ṙ ur + r u̇r = ṙ ur + r ϕ̇ uϕ
(2.8.21)
Derivando ancora allo stesso modo troviamo per l’accelerazione
aP = (r̈ − r ϕ̇2 ) ur + (r ϕ̈ + 2ṙ ϕ̇) uϕ
(2.8.22)
Si noti che i versori ur e uϕ non sono in generale i versori tangente e normale alla traiettoria,
mentre questo avviene se la traiettoria è un cerchio centrato nell’origine, quindi con r = cost., nel
qual caso la (2.8.22) concorda esattamente con le (2.8.9), (2.8.10).
2.9 Cinematica dei sistemi
All’inizio del capitolo avevamo detto che qualsiasi sistema meccanico si può considerare composto
da un insieme finito o infinito di punti e che descriverne il moto significa conoscere in funzione del
tempo le coordinate di tutti i punti, ossia quella che si chiama la configurazione del sistema. Se
consideriamo un sistema di n punti, ciascuno dei quali libero di muoversi indipendentemente nello
spazio, avremo un totale di 3 n gradi di libertà. Un sistema costituito da infiniti punti liberi avrebbe
infiniti gradi di libertà e il suo moto non sarebbe rappresentabile compiutamente.
Se alcuni dei punti sono vincolati a muoversi in un determinato modo, il numero dei loro gradi
di libertà diminuisce, e quindi anche quello totale del sistema. Un caso interessante si ha quando
i vincoli costituiscono relazioni fra i moti di due o più punti.
Consideriamo come esempio due punti P1 e P2 , vincolati a mantenere fissa la loro distanza
D. Ci aspettiamo che i gradi di libertà del sistema siano 5, ossia i 6 che spetterebbero ai due
punti se fossero liberi meno uno, eliminato dal vincolo. In effetti, è facile convincerci che le cose
stanno proprio cosı̀: consideriamo il punto P1 : esso può trovarsi in qualsiasi posizione dello spazio
e quindi per individuarlo possiamo usare le sue tre coordinate (x1 , y1 , z1 ) in un sistema cartesiano
ortogonale OXY Z. Una volta fissata la posizione di P1 , P2 può trovarsi solo su una superficie
sferica di centro P1 e raggio D. Se consideriamo un sistema cartesiano P1 X1 Y1 Z1 di origine P1
e con gli assi paralleli a quelli di OXY Z, le coordinate sferiche angolari θ2 e ϕ2 di P2 in questo
sistema ne individuano univocamente la posizione rispetto a P1 . Il sistema quindi ha 5 gradi di
libertà, rappresentabili tramite i parametri (x1 , y1 , z1 , θ2 , ϕ2 ).
2.9.1 Il corpo rigido
Si chiama corpo rigido un insieme (finito o infinito) di punti vincolati a mantenere costanti le
distanze reciproche. Si dimostra facilmente che, anche nel caso di infiniti punti, a un corpo rigido
47
2.9.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Z1
Z
P2
Y1
θ2 D
P1
z1
O
Y
ϕ2
y1
x1
X1
X
Fig. 2.9.1: Due punti vincolati a mantenere fissa la loro distanza costituiscono un sistema con 5
gradi di libertà.
competono 6 gradi di libertà. Cominciamo a ragionare infatti come nel caso appena esemplificato:
scegliamo un primo punto P1 del corpo, che si potrà trovare in ogni posizione dello spazio e quindi
avrà, come prima, 3 gradi di libertà rappresentabili dalle coordinate cartesiane (x1 , y1 , z1 ). Una
volta fissata la posizione di P1 , scegliamo un secondo punto P2 appartenente al corpo. P2 potrà
muoversi su una superficie sferica di centro P1 e raggio |P2 − P1 |; la sua posizione sarà ancora
determinata dagli angoli (θ2 , ϕ2 ). Adesso scegliamo un terzo punto P3 del corpo, che non sia
allineato con P1 e P2 . Se manteniamo fissi i primi due punti, P3 potrà solo ruotare intorno
all’asse determinato da essi e la sua posizione si potrà individuare tramite un solo angolo ψ3 . Una
volta cosı̀ fissata la posizione dei primi tre punti, tutti gli altri punti del corpo dovranno mantenere
fisse le distanze da P1 , P2 e P3 e quindi non potranno più effettuare alcun movimento, per cui i
6 parametri (x1 , y1 , z1 , θ2 , ϕ2 , ψ3 ) individuano la posizione di tutti i punti del sistema.
Z1
ψ3
Z
P2
P3
θ2 D
P1
z1
O
Y1
Y
ϕ2
y1
x1
X1
X
Fig. 2.9.2: Tre punti non allineati vincolati a mantenere costanti le distanze reciproche costituiscono
un sistema con 6 gradi di libertà. Ulteriori punti con gli stessi vincoli non aumentano i gradi di libertà..
2.9.1
48
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
2.10 Movimento relativo di sistemi di riferimento
In 2.5 abbiamo visto che gli spostamenti e le velocità sono valutati in modo diverso a seconda
del sistema di riferimento in cui si trova l’operatore con i suoi apparecchi di misura. Vogliamo
estendere lo studio al caso più generale, dove un sistema varia nel tempo l’orientazione dei propri
assi rispetto ad un altro.
Z
Z'
P
O
Y
Y'
O'
X
X'
Fig. 2.10.1: Il vettore posizione del punto
O� X � Y � Z � .
P
nel sistema OXY Z che si muove rispetto al sistema
Consideriamo un sistema cartesiano OXY Z e un vettore posizione (P − O) espresso nel medesimo. Il sistema di riferimento a sua volta si muove rispetto ad un altro sistema O� X � Y � Z � . Se le
coordinate di P in OXY Z sono (x, y, z) potremo scrivere per il vettore posizione di P nel sistema
O� X � Y � Z �
(P − O� ) = (P − O) + (O − O� ) = x i + y j + z k + (O − O� )
(2.10.1)
Possiamo anzitutto considerare i versori i, j e k . Comunque il sistema di riferimento si muova, i
punti sulle estremità dei versori mantengono fisse le proprie distanze reciproche e quelle dall’origine
O. Il sistema di riferimento OXY Z dunque si muove rispetto a O� X � Y � Z � come un unico corpo
rigido, a cui competono 6 gradi di libertà. I parametri corrispondenti sono le coordinate di O nel
sistema O� X � Y � Z � e tre angoli, che individuano gli orientamenti degli assi X, Y e Z rispetto a
quelli di O� X � Y � Z � . Questi tre angoli sono detti angoli di Eulero. Non approfondiamo oltre su
di essi, sia perché possono essere definiti in modi differenti12 , sia perché non ce ne serviremo in
pratica.
Vediamo adesso come viene valutata la velocità di P nei due sistemi di riferimento. Useremo
un apice per le grandezze misurate in O� X � Y � Z � . Derivando rispetto al tempo la (2.10.1) si ha
d
di
dj
dk
�
�
(P − O� ) = vP
= vO
+ ẋ i + ẏ j + ż k + x
+y
+z
dt
dt
dt
dt
12
(2.10.2)
Ad esempio, chi si occupa di studiare il volo degli aerei usa una definizione diversa da quella usata normalmente in
meccanica classica
49
2.10
C Andrea Perego 2012-2015 – versione 15 marzo 2016 h10:38
Vogliamo esprimere le derivate temporali dei versori13 in un modo sintetico, che tenga conto delle
loro proprietà. Innanzitutto, dato che il modulo di ciascun versore è unitario, avremo
d 2
d
di
|i| =
(i · i) = 2 i ·
=0
dt
dt
dt
⇒
i·
di
=0
dt
(2.10.3)
Espressioni analoghe valgono per gli altri due versori. Questo ci dice, come già avevamo visto in
2.7, che la derivata temporale di un versore è sempre perpendicolare al versore stesso. Possiamo
allora esprimerla come il prodotto vettoriale fra il versore e un altro vettore. Per ciascun versore,
in linea di principio potremo considerare un vettore diverso, che chiameremo rispettivamente ω i ,
ω j , ω k definiti nel modo seguente
ω i : (ωix i + ωiy j + ωiz k) × i =
di
dt
ω j : (ωjx i + ωjy j + ωjz k) × j =
dj
dt
ω k : (ωkx i + ωky j + ωkz k) × k =
(2.10.4)
dk
dt
Osserviamo subito che le componenti ωix , ωjy e ωkz possono avere un valore arbitrario, dato che
comunque il loro effetto è annullato dal prodotto vettoriale. Usando tre vettori indipendenti imponiamo che la derivata di ciascun versore è perpendicolare al versore stesso, ma non possiamo dire
che dopo un intervallo infinitesimo dt i tre versori siano ancora perpendicolari fra loro. Dobbiamo
imporre anche queste condizioni. Una di esse è
(i + di) · (j + dj) = 0
⇒
i · dj + j · di = 0
(2.10.5)
dove si è sfruttato il fatto che i · j = 0 e si è trascurato il termine di · dj in quanto infinitesimo del
secondo ordine. Introducendo le (2.10.4) nella (2.10.5) abbiamo
i · [(ωjx i + ωjy j + ωjz k) × j] dt + j · [(ωix i + ωiy j + ωiz k) × i] dt = 0
⇒
−ωjz + ωiz = 0
(2.10.6)
Imponendo anche le altre due condizioni, ossia che j · dk + k · dj = 0 e k · di + i · dk = 0 si
ottiene, rispettivamente, che deve essere ωkx = ωjx e ωiy = ωky . Da questo si deduce che possiamo
scrivere correttamente la derivata temporale dei tre versori usando uno e un solo vettore ω .
di
=ω×i
dt
dj
=ω×j
dt
dk
=ω×k
dt
(2.10.7)
Il vettore ω cosı̀ definito è detto velocità angolare del sistema di versori i, j, k. Esso può essere
espresso per mezzo degli angoli di Eulero e delle loro derivate temporali, ma, mentre useremo
13
Tutte le derivate temporali dei versori si OXY Z sono ovviamente valutate nel sistema O� X � Y � Z � : in OXY Z
sarebbero identicamente nulle.
2.10
50
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
il concetto di velocità angolare, non ci occuperemo di calcolarla se non in casi particolarmente
semplici.
Possiamo riscrivere la (2.10.2) in funzione della velocità angolare come
�
�
ω × i) + y (ω
ω × j) + z (ω
ω × k) =
vP
= vP + vO
+ x (ω
�
= vP + vO + ω × (x i + y j + z k)
�
= vP + vO
+ ω × (P − O)
����
�
��
�
vel. rel.
vel. trasc.
(2.10.8)
La (2.10.8) esprime nel caso più generale la relazione che esiste fra la velocità di uno stesso punto
�
misurata in due sistemi di riferimento diversi. La velocità vP
di P misurata nel nel sistema
� � � �
(O X Y Z ) è data dalla velocità vP misurata in (OXY Z) che chiamiamo velocità relativa e dalla
�
cosiddetta velocità di trascinamento vt� = vO
+ ω × (P − O). La velocità di trascinamento si
può definire come la velocità di un punto che istantaneamente coincide con P ma è fermo nel
sistema (OXY Z). Il primo termine della velocità di trascinamento deriva dal fatto che l’origine di
(OXY Z) si muove in (O� X � Y � Z � ), il secondo termine è legato al cambiamento di direzione degli
assi nel tempo.
Abbiamo visto come varia il vettore velocità al variare del sistema di riferimento. Possiamo
estendere la cosa a un qualsiasi vettore w che sia espresso nel sistema (OXY Z) come w = wx i +
wy j + wz k
�
�
dw
di
dj
dk
= ẇx i + ẇy j + ẇz k + wx
+ wy
+ wz
dt O� X � Y � Z �
dt
dt
dt
�
�
(2.10.9)
dw
=
+ω ×w
dt OXY Z
Quindi la derivata temporale di un vettore misurata in due sistemi di riferimento in moto relativo
differisce per un termine dato dal prodotto vettoriale fra la velocità angolare ω di un sistema
rispetto all’altro e il vettore stesso. Un caso particolare si ha se consideriamo il vettore ω stesso
�
ω
dω
dt
�
=
O� X � Y � Z �
�
ω
dω
dt
�
OXY Z
+ω ×ω =
�
ω
dω
dt
�
(2.10.10)
OXY Z
Quindi la derivata temporale del vettore ω coincide nei due sistemi di riferimento.14
Vogliamo spingerci oltre in questo studio e determinare come viene misurata nel sistema
(O� X � Y � Z � ) l’accelerazione del punto P. Per fare questo deriviamo rispetto al tempo la (2.10.2)
a�P
=
a�O
�
�
di
dj
dk
d2 i
d2 j
d2 k
+ ẍ i + ÿ j + z̈ k + 2 ẋ
+ ẏ
+ ż
+x 2 +y 2 +z 2
dt
dt
dt
dt
dt
dt
(2.10.11)
Per il calcolo della derivata seconda temporale dei versori
d2 i
d
ω × i) = ω̇
ω × i + ω × (ω
ω × i)
=
(ω
dt2
dt
14
(2.10.12)
Essa avrà naturalmente componenti diverse nei due sistemi, ma resterà lo stesso vettore, come nel primo esempio
dato in 2.6.
51
2.10
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Analogamente a quanto fatto per la (2.10.8), la (2.10.12) si può scrivere come
a�P =
ω × (P − O) + ω × [ ω × (P − O) ] + 2 ω × vP
aP + a�O + ω̇
����
� �� �
�
��
�
acc. rel.
acc. Coriolis
acc. trasc.
(2.10.13)
Il primo termine della (2.10.13) è l’accelerazione misurata nel sistema OXY Z, cioè l’accelerazione
relativa. Il secondo termine costituisce l’accelerazione di trascinamento: essa corrisponde all’accelerazione del punto Q che istantaneamente coincide con P ma è fisso nel sistema mobile.
Il terzo termine, infine, prende il nome di accelerazione di Coriolis dal nome del fisico francese che
l’ha studiata per primo. Essa risulta da due contributi identici, uno che proviene dalla derivazione
della velocità relativa, uno dalla derivazione della velocità di trascinamento. Infatti, anche se avessimo in OXY Z una velocità relativa costante, questa cambierebbe di direzione in O� X � Y � Z � perché
gli assi del primo sistema variano la loro orientazione nel tempo; inoltre il punto P, muovendosi
in OXY Z, va a coincidere istante per istante con un punto Q diverso, a cui compete una diversa
velocità di trascinamento.
Le considerazioni e i calcoli fatti nella presente sezione possono apparire formali e complicati,
ma questo risulta dal fatto che la descrizione del moto relativo di due sistemi di riferimento nel caso
generale è effettivamente un argomento complicato e non molto intuitivo, anche perché migliaia
di anni di scrittura e disegno su superfici bidimensionali ci hanno portato ad avere mediamente
difficoltà quando si tratta di visualizzare oggetti e situazioni in tre dimensioni. In ogni caso,
abbiamo pensato opportuno fornire le formule generali, mentre per gli esempi e le applicazioni ci
limiteremo a casi particolari in cui è anche più facile acquisire una visione intuitiva dei fenomeni.
2.11 Moto del corpo rigido – concetto di rotazione
I risultati della sezione precedente sono estremamente utili per analizzare in maggior dettaglio il
moto di un corpo rigido. Dato un corpo rigido, infatti, noi possiamo sempre determinare su di esso
un punto O e altri tre punti Px , Py , Pz tali che i vettori (Px − O), (Py − O), (Pz − O) risultino
fra loro perpendicolari e diretti come i tre assi di una terna cartesiana. Una volta stabilita questa
terna, che risulta solidale con il corpo rigido, tutti gli altri punti di esso manterranno costanti le
loro coordinate rispetto ad essa. In generale, potremo determinare infiniti sistemi cartesiani solidali
col corpo rigido, ma basta averne fissato uno per descrivere compiutamente il moto.
Infatti, una volta stabilita la terna solidale con il corpo, il moto di ciascun punto in un sistema
di riferimento esterno obbedisce alle (2.10.8) e (2.10.13), in cui i termini di velocità e accelerazione
relativa risultano identicamente nulli, dato che il punto è fermo nel sistema solidale con il corpo
rigido. la (2.10.8) diventa15
vP = vO + ω × (P − O)
(2.11.1)
Più in generale, se abbiamo due punti qualunque P1 e P2 , scrivendo le loro velocità secondo la
(2.11.1) e facendone la differenza, ricaviamo
vP1 − vP2 = ω × (P1 − P2 )
(2.11.2)
La (2.11.2) è detta formula fondamentale della cinematica del corpo rigido e lega fra loro le velocità di due qualsiasi punti. Si nota immediatamente che la differenza di velocità fra due punti
15
Omettiamo gli apici “ � ” per riferirci al sistema esterno al corpo, dato che qui non esistono velocità e accelerazioni
relative.
2.11
52
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
risulta sempre perpendicolare al vettore che unisce i punti stessi. Questo risultato si poteva ricavare
osservando che per qualsiasi coppia di punti |P1 − P2 | = cost. e che
� immediatamente
�
2
d/dt |P1 − P2 | = 2 (vP1 − vP2 ) · (P1 − P2 ).
La (2.11.2) permette di fare alcune considerazioni interessanti:
1. Se ω si mantiene nullo tutti i punti hanno la stessa velocità. In questo caso si parla di un moto
di traslazione. Gli spostamenti di tutti i punti in un dato intervallo di tempo sono uguali e gli
assi solidali con il corpo mantengono invariata la loro orientazione rispetto agli assi del sistema
esterno.
2. Se un punto del corpo ha velocità sempre nulla (possiamo supporre, senza perdere in generalità,
che sia O) tutti gli altri punti si muovono su superfici sferiche centrate in esso, e si dice che il
corpo ha un moto di rotazione.
a)
b)
C
hP
P vP
dφ
C
dP=ωhP dt
P
hP
ω
O
Fig. 2.11.1: a) Moto di un corpo rigido intorno ad un asse fisso passante per O. Un osservatore
che guarda lungo l’asse verso la “punta” del vettore ω vede i punti muoversi su traiettorie circolari. b)
Angolo infinitesimo di cui ruota un punto intorno all’asse per uno spostamento infinitesimo dP.
Se poi ω mantiene fissa la sua direzione, tutti i punti che si trovano sulla retta parallela a
ω passante per O rimangono fermi: tale retta si chiama asse di rotazione. Gli altri punti si
muovono su circonferenze giacenti in piani perpendicolari all’asse di rotazione e aventi i centri
su di esso. La velocità di ciascun punto è data da:
vP = ω × (P − O)
⇒
ω | hP
|vP | = |ω
(2.11.3)
dove hP è la distanza di P dall’asse di rotazione, raggio della traiettoria circolare. Per un osservatore che guarda verso la “punta” del vettore ω i punti del corpo ruotano in senso antiorario.
Se t è il versore tangente al cerchio-traiettoria nel verso del moto, vP = vP t = ω hP t. Se consideriamo lo spostamento in un intervallo di tempo infinitesimo dt avremo dP = dP t = ω hP dt t.
Ciò corrisponderà uno spostamento di un angolo dφ = dP/hP = ω dt. La derivata dell’angolo in
funzione del tempo è φ̇ = ω. Questo giustifica il nome velocità angolare attribuito a ω . È da notare che i movimenti di rotazione hanno caratteristiche diverse e più complesse degli spostamenti
traslatori. Infatti, ad esempio, se sottoponiamo un corpo a due spostamenti traslatori successivi,
a ogni punto competerà uno spostamento uguale, e se invertiremo l’ordine degli spostamenti il
risultato non cambierà, come avviene per gli spostamenti di un punto. Questo non avviene per
le rotazioni: se ruotiamo ad esempio un corpo rigido di un angolo finito αx intorno all’asse X
53
2.11
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
e quindi di un angolo αy intorno all’asse Y , questo si troverà, come dimostra la fig. 2.11.2, in
una configurazione completamente diversa di quella a cui sarebbe giunto se avessimo effettuato
le due rotazioni in ordine inverso.16
Z b)
Z
a)
c)
Z
1)
Y
Y
X
X
Z
Z d)
e)
Y
X
Y
Y
X
X
2)
Fig. 2.11.2: Invertendo l’ordine di due rotazioni intorno ad assi diversi si ottengono due risultati
diversi per il movimento di un corpo rigido. Dalla situazione di partenza a) seguendo la sequenza 1)
si opera sul dizionario prima una rotazione di π/2 intorno all’asse Z e poi una, sempre di π/2, intorno
all’asse Y . Nella sequenza 2) le due rotazioni sono invertite di ordine.
2. Le differenze di velocità fra i punti del corpo rigido sono tutte perpendicolari a ω . Questo
significa che tutti i punti, in ogni istante, hanno la stessa componente di velocità in direzione di
ω . Vogliamo dimostrare che in ogni istante il moto di un corpo rigido si può considerare dato
dalla composizione di un moto di traslazione nella direzione di ω e di una rotazione intorno a
un asse diretto come ω , detto asse istantaneo di rotazione. I punti che si trovano su di esso
avranno, nell’istante considerato, velocità parallela a ω .
Si può dimostrare facilmente l’affermazione: consideriamo un punto O sul corpo rigido e il
componente vO⊥ della sua velocità nella direzione perpendicolare a ω (vedi fig. 2.11.3). Il punto
O e i due vettori vO⊥ e ω individuano il piano p1 in fig. 2.11.3. Se vO⊥ = 0 O si trova sull’asse
istantaneo di rotazione, che in questo caso è la retta r passante per O parallela a ω . In generale
VO⊥ �= 0 e l’asse istantaneo di rotazione ai è una retta parallela a r giacente nel piano p2 che
contiene O, il vettore ω ed è perpendicolare a p1 . La distanza fra l’asse di rotazione ai e la retta r
vale h = |vO⊥ |/ω; un osservatore che fosse in piedi sul piano p3 passante per O e perpendicolare
a p1 e p2 , con la direzione piedi–testa parallela a ω e nello stesso verso, e guardasse verso la
“punta” del vettore vO⊥ vedrebbe ai a destra rispetto a r.
La retta cosı̀ determinata è effettivamente l’asse istantaneo di rotazione: se prendiamo un
punto Q su di essa avremo
vQ = vO// + vO⊥ + ω × (Q − O) = vO// + vO⊥ − vO⊥ = vO//
(2.11.4)
dove vO// è il componente di vO parallelo a ω . Il risultato è dovuto al fatto che con la scelta
16
Si può dimostrare che l’ordine delle rotazioni rispetto a assi diversi non cambia il risultato quando queste sono
infinitesime.
2.11
54
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
p2
p1
r
ai
vO
ω
Q
t. ro
taz.
h=
asse
istan
ω
vO
O
ω (Q – O)
p3
Fig. 2.11.3: Determinazione dell’asse istantaneo di rotazione di un corpo rigido.
fatta per ai risulta evidentemente ω × (Q − O) = −VO⊥ . Quindi tutti i punti di ai hanno
all’istante velocità parallela a ω , c.v.d.
2.11.1 Accelerazione dei punti del corpo rigido
L’accelerazione di un punto P appartenente un punto rigido può essere ricavata dalla (2.10.13),
dove si deve considerare che, essendo il punto fermo nel sistema di assi solidale col corpo, la sua
velocità e accelerazione relativa sono sempre nulle. Rimangono soltanto quindi i termini che nel
caso generale costituiscono l’accelerazione di trascinamento.
ω × (P − O) + ω × [ ω × (P − O) ]
aP = aO + ω̇
(2.11.5)
La (2.11.5) non si presta, nel caso generale, a interpretazioni intuitivamente evidenti, ma è interessante studiare il caso più semplice, quello della rotazione intorno ad un asse fisso. Consideriamo
un corpo rigido che si muove con velocità angolare ω = ϕ̇ k intorno al punto O fisso. Consideriamo
un altro punto P del corpo, situato a una distanza h dall’asse Z.
Il punto P si muove su una traiettoria circolare di raggio h giacente in un piano parallelo al
piano XY e con il centro sull’asse Z. La sua velocità è data da ω × (P − O) = h ϕ̇ t, dove t è il
versore tangente alla traiettoria. La sua accelerazione è data dalla somma di due componenti
ω × (P − O) = ϕ̈ k × (P − O) = h ϕ̈ t
ω̇
ω × [ ω × (P − O) ] = ϕ̇ k × [ ϕ̇ k × (P − O) ] = h ϕ̇2 n
(2.11.6)
La (2.11.6) è perfettamente coerente con la (2.7.6). Il termine normale prende il nome di accelerazione centripeta del moto di rotazione.
55
2.11.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Z
h
an
P
at
Y
ω
O
ϕ
X
Fig. 2.11.4: Accelerazione tangenziale e normale di un punto di un corpo rigido rotante intorno ad
un asse fisso.
2.12 Rotolamento
Il rotolamento è una forma particolare di moto vincolato in cui le superfici di due corpi si
mantengono in contatto fra loro. La condizione espressa cosı̀ è molto generica e comprende casi
particolarmente complicati, come ad esempio quello di uno pneumatico semi–sgonfio che rotola sul
terreno aderendo ad esso con una zona finita di superficie. Se invece ci limitiamo a considerare due
corpi rigidi la situazione diventa più definita. In questo caso le due superfici in ciascun istante si
toccano in un punto, in cui sono reciprocamente tangenti.
a)
b)
vP
'
P'
P
n'
n'
'
=v P
P'
P
P v
vP
n
n
Fig. 2.12.1: Rotolamento di due superfici rigide. Nel caso a) le velocità dei due punti in contatto, P
e P� , sono uguali solo nella direzione della normale e si ha strisciamento, nel caso b) le velocità coincidono
e si ha rotolamento puro.
Un punto P della prima superficie e un punto P� della seconda sono istantaneamente in contatto.
Le loro velocità vP e vP� dovranno avere uguale componente nella direzione della normale alle
superfici. Se cosı̀ non fosse all’istante successivo i due corpi si separerebbero, e non si avrebbe
più rotolamento, o dovrebbero compenetrarsi, fatto impedito dalla loro rigidità. Quindi vP e vP�
potranno differire solo per le componenti tangenti alle superfici. Se queste sono diverse, le due
superfici strisceranno una sull’altra. Se invece vP = vP� non si avrà strisciamento e il moto sarà
detto rotolamento puro.
2.12
56
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Lo studio del moto di rotolamento puro fra due superfici nello spazio tridimensionale è particolarmente complesso, perché istante dopo istante, al cambiare dei punti di contatto, cambiano la
direzione delle normali alle superfici e i raggi di curvatura locali delle medesime, e risulta quindi
ben al di sopra degli scopi di questa dispensa. È invece “abbordabile” e molto utile il caso in cui il
moto di rotolamento risulta confinato in due sole dimensioni e le superfici di contatto, di cui possiamo considerare solo l’intersezione col piano di moto, si riducono a curve di forma geometricamente
semplice.
Come primo esempio di moto di rotolamento in due dimensioni consideriamo il rotolamento
puro di una ruota di raggio r su una guida rettilinea fissa, illustrato in fig. 2.12.2.
y
O
C
ϕ
P
x
Q
Fig. 2.12.2: Rotolamento di una ruota di raggio r su una guida rettilinea.
Osserviamo prima di tutto che la ruota, vincolata a muoversi in un piano, ha di per sé 3 gradi di
libertà. Possiamo infatti individuare la configurazione di essa se conosciamo le due coordinate nel
piano del suo centro C17 e l’angolo ϕ formato da un suo punto P con una direzione fissa. Inoltre
la ruota è vincolata a poggiare sulla guida e questo implica un’ulteriore restrizione: il centro C
dovrà essere sempre a una distanza r dalla guida. Infine, il rotolamento puro implica che il punto
della ruota che istantaneamente tocca la guida (Q in fig.) abbia velocità nulla. Questo ulteriore
vincolo abbassa il numero di gradi di libertà a uno, per cui potremo descrivere il moto della ruota
usando un unico parametro.
Per tradurre in pratica il ragionamento, fissiamo un sistema di riferimento cartesiano con l’asse
X parallelo alla guida a una distanza r da essa. In questo modo possiamo indicare la posizione del
centro C semplicemente in base alla sua ascissa x, mentre l’ordinata resterà sempre nulla. Scelto
poi un punto P sulla ruota, individueremo la sua posizione rispetto al centro in funzione dell’angolo
ϕ che la congiungente CP forma con il segmento che va da C al punto di contatto con la guida.18
Avendo scelto il verso di crescita di ϕ antiorario, potremo subito scrivere la velocità angolare della
ruota come ω = ϕ̇ k.
Cerchiamo adesso la relazione che deve esistere fra i parametri x e ϕ, dovuta al vincolo di
rotolamento puro. Per fare questo scriviamo in funzione dei due parametri la velocità del punto Q
che si trova istantaneamente a contatto della guida
vQ = vC + ω × (Q − C) = ẋ i + ϕ̇ k × (−r j) = (ẋ + r ϕ̇) i
(2.12.1)
Per il vincolo di rotolamento puro la velocità di Q deve essere uguale a quella del punto con cui
17
18
Da un punto di vista formale potremmo ugualmente scegliere qualsiasi punto sulla ruota per questo scopo, ma la
scelta del centro semplifica enormemente lo studio.
Si noti che l’angolo viene contato a partire dalla direzione fissa verso quella mobile e non viceversa. Non sarebbe
stato sbagliato fare il contrario, ma questo avrebbe complicato i calcoli con forti rischi di errori di segno.
57
2.12
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Q è in contatto sulla guida, che è ovviamente fermo, per cui dobbiamo imporre che sia
vQ = 0
⇒
ẋ = −r ϕ̇
(2.12.2)
La (2.12.2) costituisce la relazione cercata fra i parametri, o, più precisamente, fra le loro derivate
temporali. Possiamo ricavare da essa una relazione fra i parametri stessi, integrando rispetto al
tempo fra l’istante t = 0, quello che scegliamo arbitrariamente come origine dei tempi, e un istante
generico t.
�
0
t
ẋ dt = −
�
0
t
r ϕ̇ dt
⇒
x(t) − x(0) = −r[ϕ(t) − ϕ(0)]
(2.12.3)
La (2.12.3) si semplifica ancora se scegliamo l’origine dei tempi t = 0 all’istante in cui il centro
C del cerchio coincide con l’origine O del sistema di riferimento, per cui x(0) = 0, e scegliamo il
punto P in modo che per t = 0 si trovi in contatto con la guida, cosı̀ che ϕ(0) = 0. Con queste
condizioni, che siamo liberi di scegliere senza perdere in generalità, la relazione fra x e ϕ ad ogni
istante risulta semplicemente x = −r ϕ. Si può quindi studiare il moto del sistema utilizzando uno
solo dei due parametri.
Fig. 2.12.3: Componenti della velocità dei punti sul bordo di una ruota che rotola su una guida
rettilinea.
Nella fig. 2.12.3 sono rappresentate le velocità di alcuni punti che si trovano sul bordo di una
ruota che sta rotolando su una guida rettilinea. Per ciascun punto vale la relazione fondamentale
(2.11.2), ossia vP = vC + ω × (P − C): i vettori verdi rappresentano il termine vC , che è uguale
per ciascun punto, mentre i vettori blu rappresentano ω × (P − C), ossia la velocità di rotazione
intorno a C. I vettori rossi sono la somma delle due componenti e indicano la velocità effettiva
dei diversi punti del bordo. Si vede che tali velocità sono tutte perpendicolari alle congiungenti i
punti con il punto che si trova istantaneamente fermo a contatto con la guida. Infatti per il punto
di contatto passa l’asse istantaneo di rotazione della ruota, diretto come il versore k. Si noti anche
che nel punto alla sommità della ruota le due componenti della velocità sono entrambe orizzontali
e dirette verso destra (il vettore verde non si vede in quanto coperto da quello blu) e la velocità di
tale punto risulta dunque parallela a quella del centro, ma di valore doppio. Nel punto di contatto
invece le due velocità si annullano a vicenda ed esso risulta, come deve essere, istantaneamente
fermo.
Come ulteriore esempio di moto bidimensionale con rotolamento puro consideriamo quello di
una ruota di centro C e raggio r vincolata a rotolare entro una guida semicircolare di raggio R.
Per studiare il moto prima di tutto stabiliamo un sistema di riferimento, che prendiamo con
origine nel centro O della guida e con l’asse X rivolto verso il basso, mentre l’asse Y è orizzontale
2.12
58
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
O
y
θ
R
C
r
x
P
ϕ t
Q n
Fig. 2.12.4: Moto di una ruota che rotola entro una guida semicircolare. Il centro C della ruota si
muove come un punto di una ipotetica sbarra rigida (indicata in giallo) imperniata in O
e diretto verso destra, in modo da avere, con l’asse Z uscente dal foglio, una terna destrorsa.19
Nella figura sono indicati anche i versori n e t, rispettivamente normale e tangenziale alle superfici
nel punto di contatto. Ripetiamo il ragionamento fatto nel caso precedente ed osserviamo che il
centro C della ruota si muoverà su una circonferenza di centro O e raggio R − r; per fissare la
sua posizione basterà conoscere l’angolo θ che la congiungente OC forma con l’asse X. Una volta
fissata la posizione di C, per conoscere la configurazione del sistema basta conoscere la posizione
di un ulteriore punto P, che prendiamo sul bordo e parametrizziamo mediante l’angolo ϕ che la
congiungente CP forma con la direzione dell’asse X 20 . Il rotolamento puro implica una relazione
fra gli angoli θ e ϕ che vogliamo determinare.
Notiamo che il centro C della ruota si muove mantenendo la sua distanza da O pari a R − r,
come se fosse imperniato a una sbarra rigida di tale lunghezza, avente l’altro estremo in O. Il moto
avviene quindi come se C appartenesse a questa sbarra e possiamo utilizzare per la sua velocità la
formula generale valida per un corpo rigido (2.11.1) ottenendo
vC = vO + θ̇ k × (C − O) = θ̇ k × (R − r) n = (R − r) θ̇ t
(2.12.4)
La velocità di P si può scrivere come
vP = vC + ϕ̇ k × (P − C)
(2.12.5)
Scriviamo quindi la velocità del punto Q sul bordo della ruota che si trova istantaneamente in
contatto con la guida
vQ = vC + ϕ̇ k × (Q − C) = (R − r) θ̇ t + ϕ̇ k × r n = [(R − r) θ̇ + r ϕ̇] t
(2.12.6)
Imponendo che la velocità di Q sia nulla si ottiene
vQ = 0
19
20
(R − r) θ̇ = −r ϕ̇
⇒
(2.12.7)
Non esiste alcun motivo di scegliere la direzione dell’asse X sempre orizzontale, mentre è molto importante, se si
vogliono poter usare le normali convenzioni per i prodotti vettoriali, che i sistemi di riferimento scelti siano destrorsi.
Si noti che anche in questo caso si misurano gli angoli a partire da una direzione fissa e crescenti per rotazioni in
senso antiorario.
59
2.12
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Se infine, come nel caso precedente, scegliamo il punto P in modo che quando θ = 0 sia anche
ϕ = 0, potremo ottenere una relazione particolarmente semplice fra gli angoli: (R − r) θ = −r ϕ.
2.12
60
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
3.
Dinamica del punto materiale
In questo capitolo affrontiamo il problema della dinamica, ossia quello di collegare il moto di
un oggetto alle sue cause e di fornire un metodo per poter determinare il moto a cui un corpo
sarà soggetto a partire dalle medesime. Va notato che questo argomento viene trattato in modo
diverso, anche se ovviamente con le stesse conclusioni, nei diversi manuali di meccanica ad uso degli
studenti universitari: la trattazione che sarà seguita qui è ripresa dal corso a suo tempo tenuto dal
prof. P. R. Maurenzig agli studenti del C.d.L. in fisica dell’Università di Firenze.
Prima di iniziare uno studio sistematico, vogliamo considerare alcuni fatti che ci sono familiari
dalla vita quotidiana:
a. Per mettere in moto un oggetto fermo occorre esercitare su di esso una qualche azione che
comporta uno sforzo fisico.
b. Gli oggetti abbandonati a se stessi tendono a muoversi in una direzione precisa, verso quello
che noi chiamiamo “basso”. Per mantenere un corpo fermo è necessario porlo sopra, appenderlo
sotto o bloccarlo insieme a un altro oggetto. Se vogliamo personalmente tenere fermo un oggetto
che non sia altrimenti sorretto, dobbiamo esercitare uno sforzo fisico che dipende dall’oggetto:
chiamiamo “pesanti” gli oggetti che richiedono uno sforzo fisico maggiore, rispetto agli altri che
diciamo “leggeri”.
c. Nel mettere in moto un oggetto fermo, a parità di sforzo, l’effetto che si ottiene dipende anche
dal tipo di oggetto che si vuole mettere in moto. Gli oggetti pesanti entreranno in moto più
difficilmente e raggiungeranno velocità più basse.
d. Un oggetto in moto tende nella maggior parte dei casi a rallentare e fermarsi. Fanno eccezione
i corpi celesti il cui moto risulta ripetitivo come traiettoria e velocità.
Queste considerazioni ci portano a pensare che il moto di un corpo dipenda dall’azione che altri
corpi esercitano su di esso: esprimeremo questo fatto attraverso una grandezza fisica che chiameremo forza. Il moto inoltre dipende anche da una caratteristica del corpo stesso, che esprimeremo
attraverso la grandezza fisica massa.
Consideriamo infine il punto d., che ha complicato l’interpretazione della dinamica da quando
l’uomo ha cominciato a porsi il problema fino all’epoca di Galileo e Newton. La tendenza dei corpi
sulla Terra a rallentare e fermarsi in assenza di azioni continue su di essi portava a pensare che
un corpo per il solo fatto di muoversi debba “consumare” qualcosa di cui dispone, esattamente
come le automobili consumano il carburante del serbatoio. Il moto dei corpi celesti era visto come
un’eccezione, spiegata, ad esempio, con una loro differente qualità, a cui si accoppiava il moto
circolare considerato perfetto, o con il fatto che una qualche entità soprannaturale li rifornisse
continuamente della quantità consumata per muoversi.
Tuttavia un’analisi più accurata mostra che ogni volta che un corpo in movimento entra in
contatto con altri si creano interazioni che tendono a diminuire la velocità relativa dei corpi, dovute
a un fenomeno che è ben noto nella vita quotidiana e che chiamiamo attrito. Si ha attrito ogni volta
che due corpi solidi si trovano a contatto uno con l’altro, soprattutto se si ha strisciamento, ma
anche quando un corpo si muove all’interno di un mezzo liquido o gassoso. Anche se non è possibile
eliminare completamente l’attrito, esistono diversi modi di ridurne gli effetti: l’uso di lubrificanti,
il passaggio da strisciamento a rotolamento per mezzo di ruote e cuscinetti, l’eliminazione del
contatto fra l’oggetto in moto e il piano d’appoggio, come si ha sui tavoli a cuscino d’aria, ecc. Via
via che si riducono gli effetti dell’attrito, si vede che si riduce la tendenza a fermarsi di un corpo
che si muove, in assenza di ulteriori azioni su di esso.
61
3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Veniamo ora a considerare in dettaglio le grandezze fisiche a cui abbiamo accennato.
3.1 Forza
Il concetto di forza, come già accennato, nasce da quello quotidiano di sforzo muscolare. Se
vogliamo però introdurre la forza come grandezza fisica, dobbiamo darne una definizione operativa.
Anche se alla fine del nostro studio daremo una definizione più soddisfacente, basata sui risultati
ottenuti, a questo punto possiamo definire la forza solo in modo empirico, dicendo che è quella
grandezza che viene misurata con uno strumento detto dinamometro.
F
p.a.
Fig. 3.1.1: Dinamometro.
Il dinamometro è costituito da una molla di materiale elastico (tipicamente, acciaio) con due
attacchi alle estremità. Uno degli attacchi viene agganciato al punto a cui deve essere applicata
la forza, e rigidamente connesso ad esso sta una scala graduata che si sviluppa parallelamente alla
molla. All’altra estremità viene collegato l’oggetto che agisce con la forza da misurare; questa
estremità reca una lancetta trasversale che indica lo stato di allungamento della molla sulla scala
graduata. Dato uno strumento con queste caratteristiche, dobbiamo precisare il modo con cui si
effettua la misura:
a. Si collega un’estremità del dinamometro, come spiegato sopra, al punto a cui deve essere applicata la forza e l’altra estremità all’oggetto che applica la forza: la direzione che assume il
dinamometro nello spazio è la direzione della forza; il verso è quello che va dal punto di applicazione all’altra estremità della molla.1
b. Definiamo uguali fra loro due forze che, applicate ciascuna al dinamometro, lo mettono nella
stessa direzione e provocano il medesimo allungamento della molla. Definiamo una forza F3
uguale alla somma di altre due forze F1 e F2 , ossia F3 = F1 + F2 se questa, applicata da sola al
dinamometro, lo mette nella stessa direzione e provoca lo stesso allungamento che si avrebbero
se applicassimo contemporaneamente al dinamometro F1 e F2 . In questo modo noi possiamo
tarare il nostro dinamometro stabilendo sperimentalmente una scala di forze in funzione del suo
allungamento, senza dover assumere a priori una relazione fra intensità della forza e allungamento della molla. Di fatto, a posteriori si può verificare che le molle di acciaio entro un limite
di sollecitazione si allungano in modo proporzionale all’intensità della forza applicata, ma con il
nostro metodo evitiamo di dipendere a priori da una tale condizione e otteniamo che se due forze
sono misurate come uguali da un determinato dinamometro, risulteranno tali anche per qualsiasi altro dinamometro costruito secondo le stesse specifiche, anche se non identico al primo. In
pratica, l’unica condizione che deve essere rispettata è che la molla non si “sfianchi” col tempo,
ossia che ritorni sempre nella stessa posizione quando si elimina la forza e che, applicando più
volte la stessa forza, si allunghi sempre nella stessa misura. Possiamo fissare un’unità di misura
della forza scegliendo come campione un determinato allungamento di un preciso esemplare di
dinamometro. Questo non è un modo particolarmente conveniente per definire l’unità di misura, dato che dipende da un particolare oggetto di cui sarebbe anche problematico garantire che
1
Questo modo di effettuare la misura è corretto solo se, agendo in un laboratorio soggetto a gravità, possiamo
trascurare il peso del dinamometro rispetto alla forza che stiamo misurando.
3.1
62
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
col tempo non modifichi il suo comportamento, tuttavia questa definizione ci servirà solo per
l’investigazione che ci porterà alla formulazione delle leggi del moto. Utilizzando il dinamometro
è possibile anche verificare sperimentalmente che:
– Se appendiamo al dinamometro uno stesso oggetto in uno stesso laboratorio misuriamo sempre
la stessa forza (se ci spostassimo in punti diversi sulla Terra potremmo vedere piccole differenze,
se poi facessimo l’esperimento sulla Luna o su un laboratorio orbitale i risultati sarebbero diversi:
sulla Luna la forza si ridurrebbe circa a un quarto, mentre in orbita il corpo “galleggerebbe”
senza bisogno di essere sostenuto e la forza misurata sarebbe nulla). Chiamiamo questo tipo di
forza forza peso.
a)
b)
F
F
Fig. 3.1.2: In a) la forza è applicata direttamente al dinamometro, mentre in b) viene interposta
una funicella che scorre su una carrucola. Nei due casi si misura la stessa intensità della forza, ma con
direzioni diverse.
– Se, invece di applicare una forza direttamente al dinamometro, noi la colleghiamo attraverso una
funicella che facciamo passare su una carrucola il cui perno è opportunamente lubrificato e/o
provvisto di cuscinetti, la forza misurata si mantiene della stessa intensità ma la sua direzione
cambia a seconda della posizione del dinamometro e della carrucola.2
Fig. 3.1.3: Dispositivo per verificare che le forze si sommano come vettori.
In base alle considerazioni fatte sopra è possibile costruire un apparecchio in cui due oggetti
sono appesi a due funicelle che passano su due carrucole e sono collegati a un dinamometro. Con
2
Questo risultato richiede anche che le masse della funicella e della carrucola, misurate secondo la definizione data
nella sezione successiva, siano trascurabili rispetto a quelle degli altri oggetti in gioco.
63
3.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
questo sistema, cambiando gli oggetti e la posizione delle carrucole, è possibile verificare che le
due forze applicate al dinamometro sono sempre equivalenti alla forza che si otterrebbe applicando
la regola del parallelogrammo della somma dei vettori. Questo fatto porta a stabilire la qualità
vettoriale della grandezza fisica “forza”.
3.2 Massa
Vogliamo adesso definire la grandezza fisica che corrisponde all’inerzia dei corpi ad essere messi
in movimento. L’esperienza quotidiana basta a convincerci che l’inerzia di un corpo non è legata
a direzioni particolari e quindi considereremo una grandezza fisica scalare. Definiamo la massa
attraverso l’uso di uno strumento che chiamiamo carrello delle masse.
m
Fig. 3.2.1: Carrello delle masse: il carrello oscilla sotto l’azione delle molle con minimo attrito. La
massa da misurare è fissata rigidamente al carrello.
L’oggetto è costituito da un carrello su ruote che si muove su rotaie con minimo attrito ed è
attaccato a due molle aventi l’altra estremità bloccata su sostegni fissi. Il carrello reca un sistema
che permette di bloccare rigidamente con esso la massa da misurare. Bloccata la massa, si sposta
il carrello in una direzione e si misura il periodo T delle oscillazioni che questo compie. Per la
misura valgono le regole seguenti
a. Due oggetti A e B hanno la stessa massa se il periodo delle oscillazioni TA che si ottiene fissando
A al carrello è uguale a quello TB che si ottiene fissando B.
b. Un oggetto C ha massa mC pari alla somma delle masse mA + mB di due altri oggetti A e B se,
posto da solo sul carrello, produce oscillazioni con un periodo TC uguale a quello che si misura
ponendo contemporaneamente sul carrello gli oggetti A e B.
Come abbiamo fatto per per il dinamometro, usiamo il carrello solo per confrontare le masse di
oggetti diversi e stabilire una regola di somma, senza fare alcuna ipotesi su quale sia nel dettaglio
la relazione che lega il periodo d’oscillazione T alla massa posta sul carrello. In questo modo due
masse che risultano uguali se misurate su un determinato carrello, lo risulteranno anche se misurate
con un carrello diverso, purché rispettante le stesse specifiche generali. Se a questo punto scegliamo
un oggetto arbitrario e gli attribuiamo la massa unitaria, possiamo costruire una scala di masse.
Nel caso della massa, l’unità ufficiale è tuttora costituita, come citato in 1.2.3, da un particolare
oggetto fisico.
3.2.1 Concetto di punto materiale
Questo capitolo è intitolato Dinamica del punto materiale ma non abbiamo ancora definito il
relativo concetto, che merita un momento di attenzione. Da un punto di vista rigoroso un punto
materiale equivale a un punto geometrico che possieda una quantità di massa m; tuttavia un oggetto di questo genere, se esistesse realmente, sarebbe addirittura non accessibile agli esperimenti.
In pratica, in tutti gli esempi che tratteremo useremo corpi di dimensioni finite, che noi schematizzeremo tramite la loro massa e le coordinate di uno dei loro punti. Questo è in generale corretto
se nel moto tutti i punti del corpo hanno istante per istante velocità uguali. Nel seguito vedremo,
studiando la dinamica dei sistemi, che per qualsiasi oggetto esiste un punto che si muove secondo
3.2.1
64
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
la dinamica del punto materiale, e questo darà una giustificazione rigorosa alla schematizzazione.
3.3 Esperienze che portano alle leggi della dinamica
Elenchiamo qui alcune semplici evidenze sperimentali che inducono a ipotizzare le leggi della
dinamica. Condurremo le nostre esperienze in un sistema di riferimento fisso rispetto alla Terra,
come può essere la stanza di un laboratorio.
a. Al punto b. dell’introduzione avevamo notato che gli oggetti lasciati a se stessi tendono a muoversi verso la direzione che chiamiamo “basso”, nel movimento che chiamiamo “cadere”. Per
evitare che un oggetto cada dobbiamo farlo sostenere da qualche altro oggetto che sia rigidamente connesso a terra. Possiamo appendere vari oggetti a un dinamometro e misurare la forza
che si deve esercitare su di essi perché rimangano fermi senza cadere. Possiamo mettere gli stessi
oggetti sul carrello per la misura delle masse: troveremo che queste stanno, per i vari oggetti,
nello stesso rapporto delle forze che abbiamo misurato prima. Se lasceremo cadere gli oggetti
e studieremo il loro moto, troveremo che tutti si muovono allo stesso modo, con accelerazione
costante, uguale per tutti gli oggetti.3
b. Se noi appoggiamo un oggetto su un piano orizzontale (ossia perpendicolare alla direzione che
assume il dinamometro quando ve lo appendiamo) questo resterà immobile. Se adesso cominciamo a inclinare il piano, l’oggetto resterà fermo fino a quando avremo raggiunto un certo
angolo, poi comincerà a scendere. Se noi levighiamo la superficie del piano e quella d’appoggio
dell’oggetto, questo comincerà a muoversi per angoli d’inclinazione più piccoli; usando un piano
a cuscino d’aria il nostro oggetto si metterà in moto alla minima inclinazione. Una volta in
moto il corpo ha un’accelerazione costante che dipende dall’inclinazione del piano. Se invece,
sul piano a cuscino d’aria, diamo una spinta all’oggetto fermo, questo continuerà a muoversi con
velocità costante.
c. Possiamo esperimentare ulteriormente con un dispositivo noto come apparecchio di Fletcher: su
un piano orizzontale con attrito minimizzato posa un corpo di massa m1 .
m1
m2
Fig. 3.3.1: Apparecchio di Fletcher.
Al corpo è attaccata una funicella inestensibile e di massa trascurabile che è tesa parallelamente
al piano, passa su una carrucola e reca appeso all’altra estremità un corpo di massa m2 . Vediamo
usando un dinamometro che se vogliamo mantenere fermi i corpi dobbiamo applicare a quello di
massa m1 una forza orizzontale pari a quella necessaria per sostenere appeso il corpo di massa
m2 . Se togliamo la forza che mantiene fermo il sistema, il corpo di massa m2 si muoverà verso il
basso con accelerazione costante e il corpo di massa m1 , vincolato dalla funicella, avrà lo stesso
moto in direzione orizzontale. Cambiando le masse cambia l’accelerazione nel moto.
d. Dopo aver fatto i nostri esperimenti nel laboratorio, ci sposteremo su un vagone ferroviario in
movimento su una pianura. Vedremo che finché il vagone si muove su un tratto rettilineo a
3
Questo vale finché si può trascurare l’attrito dell’aria.
65
3.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
velocità costante rispetto al terreno i nostri esperimenti daranno esattamente gli stessi risultati,
ma se il vagone avrà accelerazione non nulla gli esperimenti daranno risultati diversi.
3.4 Le leggi di Newton
Evidenza sperimentale come quella descritta nella sezione precedente portò Newton a formulare
le sue tre leggi che costituiscono la base della meccanica classica.
3.4.1 La prima legge di Newton
Dalle esperienze citate sopra si deduce che nel sistema del laboratorio un corpo può restare fermo
solo se ad esso è applicata una forza verticale che compensi quella di attrazione su esso esercitata
dalla Terra. Una volta realizzata questa condizione, il corpo potrà restare fermo solo se su di esso
non sono applicate forze orizzontali, o se la loro somma è nulla. A questo punto se interagiamo
con il corpo mettendolo in moto, finita la nostra interazione questo manterrà una condizione di
moto rettilineo a velocità costante. Se si opera su un riferimento mobile rispetto alla Terra, il
comportamento del corpo sarà lo stesso solo se il sistema si muove di moto rettilineo uniforme.
Newton sintetizza questa evidenza nella sua prima legge:
Corpus omne perseverare in statu suo quiescendi vel movendi
uniformiter in directum nisi quatenus a viribus impressis cogitur statum illum mutare.4
Questa legge, nota come principio d’inerzia, nella formulazione originale newtoniana non parla
del sistema di riferimento; oggi si preferisce enunciarla tenendo conto anche di questo aspetto:
Se un corpo non interagisce con altri oggetti, è sempre possibile
determinare un sistema di riferimento in cui esso o è fermo o si muove
di moto rettilineo uniforme.
Un tale sistema di riferimento si chiama riferimento inerziale e la legge ne stabilisce l’esistenza.
In generale i possibili sistemi inerziali sono infiniti e si muovono uno rispetto all’altro di moto
traslatorio rettilineo e uniforme.
3.4.2 La seconda legge di Newton
Le esperienze evidenziano una relazione fra la somma delle forze applicate a un corpo e l’accelerazione del medesimo. In particolare poi la relazione risulta di proporzionalità fra forza e
accelerazione. Newton espresse la legge con l’affermazione
Mutationem motus proportionalem esse vi motrici impressae
et fieri secundum lineam rectam qua vis illa imprimitur.5
Nella formulazione attuale diventa
In un sistema di riferimento inerziale l’accelerazione di un corpo è
4
5
La frase appare come Lex I nel capitolo Axiomata sive leges motus dell’opera di Sir Isaac Newton Philosophiæ
Naturalis Principia Mathematica, pubblicata nel 1687. In italiano: ogni corpo persevera nel suo stato di quiete o
di moto rettilineo uniforme se non è costretto a mutare tale stato da una qualche forza impressa.
Ibidem, Lex II. Ovvero: la mutazione del moto è proporzionale alla forza motrice impressa e avviene lungo la linea
retta secondo la quale la forza è impressa.
3.4.2
66
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
direttamente proporzionale alla somma delle forze che gli altri corpi
esercitano su di esso e inversamente proporzionale alla sua massa.
Se indichiamo con F la somma delle forze applicate ad un corpo di massa m, avremo, in un
sistema inerziale, una relazione di proporzionalità con l’accelerazione a
F = kma
(3.4.1)
dove la costante k si determina sperimentalmente e dipende dalle unità di misura adottate per
forza e massa. Questa relazione può essere verificata, nella fase deduttiva del processo di ricerca,
innumerevoli volte. Una volta che la legge si considera accettata, possiamo usarla per definire la
forza. Scegliamo per la costante k un valore unitario e definiamo la forza e la sua unità di forza
nel modo seguente:
La somma delle forze applicate a un corpo equivale al prodotto
della sua massa per la sua accelerazione. La forza unitaria di 1
newton 6 è quella che, applicata a un corpo avente massa 1 kg, produce un’accelerazione di 1 m · s−2
Con questa definizione la relazione che lega forza e accelerazione diventa
F = ma
(3.4.2)
Abbiamo racchiuso la (3.4.2) in un rettangolo per sottolineare il fatto che essa rappresenta la
formula fondamentale della dinamica in meccanica classica, che permette di determinare il moto
di un corpo una volta nota la sua massa e le forze agenti su di esso.
L’equazione dimensionale della forza è
[F ] = L · M · T−2
(3.4.3)
3.4.3 La terza legge di Newton
Se consideriamo le esperienze citate in 3.3 possiamo vedere che le forze sono dovute all’interazione
fra due corpi. A volte questa interazione avviene per contatto diretto, come nel caso di un oggetto
appoggiato su o appeso a un altro, o di due oggetti che si urtano, in altri casi il contatto diretto
non si ha, come per la forza che attrae i corpi verso il basso, nella direzione del centro della Terra
(e come per le forze dovute ai fenomeni elettromagnetici). Nel caso della gravità è ragionevole
pensare che l’interazione avvenga fra il corpo e la Terra stessa; Newton andò oltre e, utilizzando i
dati che venivano dagli astronomi, arrivò, come vedremo in un capitolo successivo, a formulare la
legge di gravitazione universale.
Gli esperimenti suggeriscono anche che le forze che i due corpi interagenti si applicano reciprocamente siano uguali in modulo, dirette lungo la linea che collega i punti di applicazione, con verso
6
In fisica alcune unità di misura sono chiamate con il cognome di uno scienziato, in genere colui che le ha introdotte
per primo. In questi casi vige la convenzione di scrivere il nome dell’unità di misura, per esteso, con l’iniziale
minuscola, mentre la sigla ha l’iniziale maiuscola: abbiamo cosı̀ newton (unità di forza), joule (unità di energia),
watt (unità di potenza), coulomb (unità di carica elettrica), mentre le rispettive sigle sono N, J, W, C.
67
3.4.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
opposto. Possiamo visualizzare il fatto considerando la fig. 3.4.1, dove un corpo è appeso a un
dinamometro, che a sua volta è attaccato a un sostegno fisso.
S
Fds
Fsd
D
Fcd
Fdc
C
Ftc
Fct
T
Fig. 3.4.1: Interazioni fra la Terra e un peso , il peso e un dinamometro , il dinamometro e un
sostegno.
Per visualizzare meglio le forze reciprocamente applicate abbiamo disegnato corpo, dinamometro
e sostegno come separati fra loro, anche se nella realtà sono connessi. Al corpo C la Terra applica
una forza Ftc . Allo stesso tempo il corpo C applica una forza Fct alla Terra (nel seguito vedremo che
la si può pensare applicata al centro della Terra). Le due forze sono uguali in modulo e direzione, con
verso opposto: Ftc = −Fct . Il corpo poi applica una forza Fcd al dinamometro e il dinamometro
una forza Fdc al corpo. Anche in questo caso le forze sono opposte Fcd = −Fdc . Infine, il
dinamometro applica al sostegno una forza Fds , e il sostegno una forza Fsd al dinamometro, con
Fds = −Fsd . Il corpo sta fermo e questo implica per la (3.4.2) che la somma delle forze a esso
applicate è nulla Ftc + Fdc = 0; anche il dinamometro è fermo, per cui Fcd + Fsd = 07 . Il sostegno
è a sua volta fermo, dal che si deduce che dovrà interagire con altri oggetti che gli applicheranno
forze tali da compensare, con la loro somma, la forza Fds .
La formulazione originale di Newton della terza legge è
Actioni contrariam semper et æqualem esse reactionem: sive
corporum duorum actiones in se mutuo semper esse æquales et
in partes contrarias dirigi.8
che possiamo riscrivere in termini attuali
I corpi interagiscono sempre a due a due; nell’interazione ciascun
corpo esercita sull’altro una forza e le due forze sono fra loro uguali
in modulo, opposte in verso e dirette lungo la linea che collega i punti
di applicazione.
La validità della terza legge o principio è dimostrata soprattutto dalle sue conseguenze nella
meccanica dei sistemi; esso è chiamato comunemente principio di azione e reazione, anche se i due
7
8
Stiamo considerando trascurabile la massa del dinamometro; in caso contrario dovremmo considerare anche l’interazione gravitazionale fra esso e la Terra
Ibidem, Lex III. Ovvero: all’azione corrisponde sempre una reazione uguale e contraria: ossia le azioni di due corpi
saranno sempre uguali e dirette in versi opposti.
3.4.3
68
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
termini diversi tenderebbero a suggerire una qualche asimmetria e quasi un rapporto in cui l’azione
causa la reazione, mentre l’interazione è perfettamente simmetrica. Su questa legge si possono fare
alcune considerazioni:
– essa stabilisce che tutte le interazioni sono binarie, ossia coinvolgono due e solo due corpi. A
prima vista può sembrare un dato scontato, ma si tratta invece di un’affermazione importantissima: se ci pensiamo bene, è tutt’altro che scontato che le interazioni meccaniche fra un sistema
di corpi siano riducibili alla sovrapposizione di sole interazioni binarie.
– Nella terza legge è implicito il fatto che l’interazione si propaghi istantaneamente: supponiamo
di avere due corpi lontani che interagiscono con una forza (gravitazione, attrazione elettrostatica) funzione della distanza. Nel momento stesso in cui spostiamo uno dei corpi, varierà la
forza esercitata sull’altro, per quanto lontano questo possa essere. Con questo mezzo si potrebbero mandare segnali da un punto a un altro a velocità infinita. Albert Einstein, sulla base
dell’evidenza sperimentale legata a fenomeni elettromagnetici, ha confutato questa possibilità
nella sua Teoria della Relatività.
Infine, dobbiamo considerare che un laboratorio fisso sulla Terra non è rigorosamente un sistema
inerziale, dato il movimento di rotazione del pianeta (e, in misura minore, quello di rivoluzione).
Tuttavia gli effetti sono abbastanza piccoli da aver permesso ugualmente di stabilire le leggi di
Newton; una volta che queste sono state fissate, una ricerca più accurata porta a verificare la
non inerzialità del riferimento terrestre e a confrontarne gli effetti con quanto previsto dalle leggi,
trovandoli in accordo entro gli errori di misura.
3.5 Interpretazione delle esperienze alla luce delle leggi di Newton
Mentre seguire con precisione il percorso induttivo dall’evidenza sperimentale alla formulazione
delle leggi sarebbe abbastanza complicato, e interessante soprattutto da un punto di vista storico,
possiamo facilmente e rigorosamente mostrare come gli esperimenti concordino con le leggi formulate, facendo al tempo stesso un esercizio utile per imparare a trattare i problemi di meccanica.
Vogliamo quindi analizzare alla luce delle leggi gli esperimenti citati in 3.3.
3.5.1 Caduta dei gravi
Se misuriamo la massa di un insieme di n oggetti, determinando i valori {m1 , m2 . . . mn } e
poi misuriamo, per gli stessi oggetti, le forze che si devono esercitare per tenerli fermi appesi al
dinamometro, trovando intensità delle medesime {F1 , F2 . . . Fn } vediamo che forze e masse sono
proporzionali
F1
F2
Fn
=
= ... =
=k
m1
m2
mn
(3.5.1)
Confrontando questo risultato con (3.4.2) si ricava immediatamente che k rappresenta il modulo
dell’accelerazione costante che ci aspettiamo caratterizzi il moto di tutti i corpi in caduta libera.
Tale accelerazione è la cosiddetta accelerazione di gravità, che si indica con il simbolo g e ha un
valore medio pari a 9.81 m · s−2 . L’accelerazione con cui un peso cade non dipende comunque solo
dall’attrazione gravitazionale, ma è influenzata anche dal movimento di rotazione terrestre, tanto
che essa va da 9.78 m · s−2 . all’Equatore fin a 9.83 m · s−2 ai poli. Essa inoltre varia anche da
luogo a luogo a causa di anomalie locali. In ogni caso gli oggetti lasciati cadere in uno stesso luogo
procedono con la stessa accelerazione.9
9
Questo se si può trascurare l’attrito dell’aria: ciò è possibile per i primi metri di caduta di oggetti sufficientemente
densi, come blocchi di metallo, mentre non è possibile, ad esempio, per una piuma. Si deve proprio a Newton aver
messo in evidenza che evidenti differenze nel moto di cauta sono dovute dell’attrito dell’aria, con un esperimento
69
3.5.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Possiamo quindi concludere che ogni corpo sulla superficie Terrestre è soggetto a una forza
Fg = m g che preferiamo chiamare forza peso piuttosto che forza di gravità, dato che non deriva
soltanto dall’attrazione gravitazionale.
3.5.2 Piano orizzontale e inclinato
Consideriamo un corpo di massa m appoggiato su un piano o, per maggior semplicità, vincolato
su su una guida rettilinea che permette solo il moto lungo se stessa.
a)
b)
y
c
)y
y
T
α
N
mg
N
N
x
x
mg
α
mg
α
x
α
Fig. 3.5.1: Moto di un corpo su una guida: a) guida inclinata con attrito, b) guida orizzontale senza
attrito, c) guida inclinata senza attrito.
Se non sono stati presi provvedimenti per minimizzare l’attrito, inclinando la guida di un angolo
α, il corpo, se inizialmente fermo, non inizia a muoversi, almeno fino a che l’angolo di inclinazione
non raggiunge un certo valore. Interpretiamo questo comportamento considerando che il vincolo
interagisce con il corpo: per evitare che quest’ultimo “entri” dentro la guida esercita una forza N
(vedi fig. 3.5.1 a) normale alla superficie di contatto: questo tipo di forza, esercitato da un vincolo
su un corpo per impedire che quest’ultimo si muova in direzioni non permesse, prende il nome di
reazione vincolare.10 Tuttavia l’attrito consente al vincolo di esercitare anche una forza T tangente
alla superficie, che interferisce con il moto del corpo lungo la guida.11 Con il sistema di assi che
abbiamo scelto in figura, abbiamo per la forza–peso
m g = m g sin α i − m g cos α j
(3.5.2)
Il corpo inizialmente fermo resta cosı̀ se la somma delle forze applicate è nulla
m g sin α i − m g cos α j − T i + N j = 0
10
11
⇒
�
N = m g cos α
T = m g sin α
(3.5.3)
in cui una biglia metallica e una piuma, in un tubo di vetro in cui era stato fatto il vuoto, cadevano con uguale
accelerazione.
Il termine usato ha un aspetto infelice in quanto può portare a fare confusione con il concetto di reazione nel
senso del terzo principio. Si tratta invece di due cose totalmente diverse. Ad esempio, nel caso della fig. 3.5.1 b
si potrebbe erroneamente pensare che N e la forza–peso m g costituiscano una coppia azione–reazione nel senso
del terzo principio. Questo sarebbe completamente errato: la reazione corrispondente a N per il terzo principio
è una forza uguale applicata verso il basso alla guida, non disegnata in figura, mentre la reazione corrispondente
a m g si può pensare applicata al centro della Terra. Nella fig. 3.4.1 sono invece indicate chiaramente le coppie
azione–reazione. Come regola generale, è utile ricordare che azione e reazione non sono mai applicate allo stesso
corpo.
Il meccanismo dell’attrito sarà spiegato in maggiore dettaglio nel seguito.
3.5.2
70
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
La presenza della forza di attrito potrebbe essere anche evidenziata sperimentalmente mettendo
la guida in posizione orizzontale e applicando al corpo una forza pure orizzontale attraverso un
dinamometro. Si verificherebbe che il corpo inizia a muoversi solo quando la forza applicata
ha superato un determinato valore, corrispondente al massimo valore possibile per la forza di
attrito. Via via che diminuiamo l’attrito fra corpo e guida la forza d’attrito massima che può essere
esercitata diminuisce: dalla (3.5.3) si comprende che più diminuisce la massima forza d’attrito
disponibile, più diminuisce il valore massimo di α per cui il corpo resta fermo sulla guida inclinata.
Se assumiamo di essere nella condizione ideale in cui tutto l’attrito è stato eliminato, la guida
potrà esercitare solo una forza normale alla sua superficie. In fig. 3.5.1 b vediamo il corpo appoggiato sulla guida senza attrito disposta orizzontalmente. In questo caso la reazione vincolare N
compensa esattamente la forza peso. In direzione orizzontale non è applicata al corpo alcuna forza.
Per la prima legge di Newton in un sistema inerziale il corpo, se inizialmente fermo, resta fermo.
Se applichiamo ad esso una forza orizzontale F = F i costante, il corpo accelererà con accelerazione
a = ẍ i, dove ẍ = F/m. Al momento in cui sospendiamo l’applicazione di F, il corpo continuerà a
muoversi con la velocità che aveva acquisito, che non varierà ulteriormente.
In fig. 3.5.1 c abbiamo invece la guida senza attrito inclinata. Il corpo non può penetrare nella
guida, né esistono forze che possano farlo sollevare da essa, per cui non si muoverà nella direzione
Y , ma solo in direzione X. Possiamo scrivere in componenti la (3.4.2)
�
m ẍ = m g sin α
0 = N − m g cos α
⇒
�
ẍ = g sin α
N = m g cos α
(3.5.4)
La seconda legge di Newton ci permette di ricavare l’accelerazione del moto lungo la guida, che è
verificata sperimentalmente, e ci fornisce anche il valore della forza N.
3.5.3 Apparecchio di Fletcher
Vogliamo studiare l’apparecchio introdotto al punto c di 3.3. Consideriamo le forze applicate
ai due corpi: il corpo 1 appoggia su una guida orizzontale priva di attrito. Su esso agisce la forza
peso di intensità m1 g, la forza esercitata dalla guida che sostiene il corpo, N , perpendicolare alla
guida data la mancanza di attrito, e la forza orizzontale T esercitata dalla funicella che collega i
due corpi. In fig. 3.5.2 abbiamo disegnato come vettori tutte le forze agenti su ciascuno dei due
corpi. Da ora e per tutto il seguito adotteremo una convenzione in questo tipo di disegni: le frecce
indicano direzione e verso dei vettori e le quantità scalari come m1 g, m2 g, N e T indicano le
componenti dei vettori nella direzione e verso delle frecce; nel caso delle due ultime forze, che sono
incognite, questo significa che se troveremo per esse un risultato negativo, il loro verso effettivo
sarà opposto a quello con cui le abbiamo disegnate.
Il corpo 2 è soggetto alla forza–peso m2 g e alla forza verticale applicata dalla funicella. Quest’ultima forza, in base a quanto detto in 3.1, ha la stessa intensità della forza che l’altro estremo
della funicella applica al corpo 1, e quindi possiamo ancora indicarla con T .
Da un punto di vista cinematico, il corpo 1 si muoverà lungo la guida orizzontale. Per esso
utilizziamo il sistema di riferimento fisso O1 X1 Y1 con l’asse delle ascisse orizzontale e diretto
verso la carrucola. Il corpo 2 è appeso alla funicella; questa permetterebbe al corpo di oscillare
a mo’ di pendolo, ma il corpo è inizialmente fermo e su di esso non agiscono forze in direzione
orizzontale, per cui possiamo dire che il suo moto avverrà solo in direzione verticale. Per il secondo
corpo usiamo un sistema di riferimento fisso O2 X2 Y2 avente l’asse delle ascisse diretto secondo la
verticale discendente. La funicella inestensibile fa sı̀ che se il corpo 1 si sposta di un tratto ∆x1 ,
il corpo 2 si sposterà di un tratto ∆x2 = ∆x1 . Se disponiamo le origini dei due sistemi in modo
tale che quando x1 = 0 risulti anche x2 = 0, le ascisse dei due corpi manterranno valori identici
fra loro durante il moto, per cui potremo scrivere x1 = x2 = x.
71
3.5.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
N
y1
O1
x1
m1
T
O2
m1g
y2
T
m2
m2g
x2
Fig. 3.5.2: Analisi dell’apparecchio di Fletcher mediante le leggi di Newton.
A questo punto scriviamo le equazioni che si ricavano dalla (3.4.2): per il corpo 1 in direzione
orizzontale e verticale, per corpo 2 solo in direzione verticale, dato che in direzione orizzontale non
abbiamo né forze né movimento
�
m1 ẍ = T
0 = N − m1 g
(3.5.5)
m2 ẍ = m2 g − T
Sostituendo il valore di T che si ricava dalla prima delle (3.5.5) nella terza avremo
N = m1 g
(m1 + m2 )ẍ = m2 g
T = m1 ẍ
⇒
N = m1 g
2
ẍ = m1m+m
g
2
T = m1 m2 g
m1 +m2
(3.5.6)
Si determinano quindi l’accelerazione del moto dei due corpi e i valori delle reazioni vincolari N e
T.
3.6 Vincoli e reazioni vincolari
Nello studio dei sistemi meccanici capita spesso di incontrare situazioni in cui uno o più oggetti
limitano in qualche modo il moto del corpo che è il centro del nostro interesse. Quasi sempre si
tratta di corpi rigidi o comunque con una proprietà immutabile, come la lunghezza per una funicella
inestensibile. Questi oggetti interagiscono con il nostro corpo attraverso forze che chiamiamo
reazioni vincolari e di cui vogliamo adesso vedere in dettaglio le caratteristiche.
Le reazioni vincolari si distinguono dalle altre forze non perché siano fisicamente di natura
diversa, ma per il modo in cui compaiono nello studio del moto: mentre le altre forze, infatti, sono
in genere note e si vuole calcolare il loro effetto sul moto,12 delle reazioni vincolari conosciamo
a priori l’effetto sul moto, ma non l’entità. Esse quindi compaiono sempre come incognite in un
problema di moto e se ne può conoscere il valore solo dopo la risoluzione.
Tuttavia, se l’intensità delle reazioni vincolari è incognita a priori, in molti casi è possibile e
necessario individuare già dall’inizio la direzione in cui esse sono esercitate, in base al tipo di
12
Questo non esclude che vi siano situazioni in cui si conosce già il moto, perché studiato sperimentalmente, e si vuol
dedurre quali forze, anche non vincolari, lo hanno prodotto.
3.6
72
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
vincolo. A questo livello del nostro studio della meccanica non possiamo impostare un’analisi
rigorosa delle reazioni vincolari ma, dato che esse compaiono in moltissimi casi, come dimostra
anche la sezione precedente, dobbiamo arrivare per via empirica a un minimo di conoscenza che ci
consenta di trattarle con successo.
Le forze esercitate dai vincoli sono tali da impedire gli spostamenti del corpo vincolato che
violano le restrizioni cinematiche imposte dai vincoli stessi: ad esempio, un vincolo che obbliga un
corpo a muoversi lungo una linea impedirà gli spostamenti perpendicolari alla traiettoria stabilita
e questo dovrà farlo con forze anch’esse perpendicolari alla traiettoria; una funicella applicherà a
un corpo attaccato a una sua estremità una forza nella sua stessa direzione.
Tuttavia in molti casi il vincolo potrebbe esercitare altre forze oltre a quelle strettamente necessarie per costringere il moto: la guida trattata in 3.5.2 può applicare anche forze parallele alla sua
superficie, a meno che non sia completamente priva di attrito: definiamo vincolo liscio o ideale un
vincolo che si limita a impedire i moti non permessi senza influenzare direttamente quelli permessi.
Questa definizione non è rigorosa e ne troveremo una migliore nel seguito,13 ma consente nella
maggior parte dei casi di schematizzare correttamente le reazioni vincolari. In essa è implicito il
fatto che i vincoli ideali devono essere, nella stragrande maggioranza dei casi, privi di attrito.14
3.6.1 Vincoli bilateri e unilateri
Alcuni vincoli sono capaci di impedire scostamenti del moto da quello permesso in ogni direzione
questi tendano ad avvenire, altri vincoli sono capaci solo di impedire scostamenti in determinate
direzioni ma non in altre: ad esempio le rotaie ferroviarie costringono il treno a non spostarsi
verso il basso o deviare lateralmente rispetto al loro andamento, almeno finché le ruote poggiano
su entrambi i binari, ma non possono impedire, appunto, che le ruote si stacchino da essi e, una
volta che queste si siano staccate, cessano di operare; per contro, le rotaie delle “montagne russe”
trattengono il vagone in traiettoria anche quando questo tenderebbe a sollevarsi da esse. Per quest’ultimo tipo di vincolo parliamo di vincolo bilatero e per le rotaie ferroviarie di vincolo unilatero.
Allo stesso modo, la guida trattata in 3.5.2 costituisce un vincolo unilatero, perché non potrebbe
trattenere il corpo se le altre forze tendessero a farlo staccare, e la funicella dell’apparecchio di
Fletcher in 3.5.3 non può impedire movimenti che la farebbero restare lasca, come ad esempio se
una forza applicata al corpo 2 lo facesse accelerare, da fermo, verso l’alto.
Nel caso dei vincoli unilateri non è possibile prevedere a priori se riusciranno a svolgere il loro
compito durante il moto oppure no. L’unico modo di accertarsene è risolvere il problema di moto
come se fossero bilateri, calcolando le forze che sarebbero chiamati a esercitare, e controllare poi
che esse rientrino nella capacità dei vincoli. In caso contrario, nel momento del moto in cui il
vincolo unilatero non riesce ad applicare la forza richiesta, il corpo vincolato si stacca dal vincolo
e si muove liberamente fino a quando non rientra in contatto o comunque rimette il vincolo in
condizione di funzionare. Ad esempio, nello studiare l’apparecchio di Fletcher abbiamo supposto,
aiutati anche dall’esperienza quotidiana, che il corpo 1 sarebbe rimasto appoggiato alla guida e la
funicella tesa. Dalle (3.5.6) le quantità N e T risultano sempre positive, il che implica che le forze
hanno effettivamente i versi con cui le abbiamo disegnate nello schema, che sono quelli permessi al
vincolo.
3.6.2 Vincoli di massa trascurabile e forze applicate
I vincoli che influiscono sul moto di un corpo possono essere oggetti esterni, di cui ad esempio si
sa che rimarranno fermi, come la guida in 3.5.2 e 3.5.3, oppure meccanismi che interagiscono fra i
corpi costituenti il nostro sistema e sono partecipi del moto, come la funicella nell’ultimo esempio.
13
14
Vedi 5.6.
Fa eccezione il vincolo di rotolamento puro, che, pur essendo un vincolo ideale, può essere realizzato anche mediante
attrito.
73
3.6.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
In questo caso capita abbastanza spesso che l’oggetto–vincolo sia considerato di massa trascurabile
rispetto ai corpi di cui si studia il moto, o perché questo corrisponde a una situazione reale, o
perché l’idealizzazione serve a facilitare la soluzione di un problema posto in ambito didattico.
In queste condizioni, la seconda legge di Newton impone che la somma delle forze applicate al
vincolo, o a una parte qualsiasi di esso, sia nulla. Se infatti nella (3.4.2) la massa m è nulla, risulta
nulla la risultante delle forze.15 . Le forze applicate al vincolo contengono le reazioni, nel senso del
terzo principio, alle forze che questo applica ai corpi, più altre forze che possono essere applicate
ad esso da ulteriori oggetti.
a)
T
T
y
T
W
dϕ
/2
b)
T
dW
T
T
ϕ
T
x
dϕ
dϕ /2
/2
O
dϕ
/2
T
Fig. 3.6.1: Forze applicate alla funicella dell’apparecchio di Fletcher. In a) la funicella è separata
nei due tratti rettilinei e quello curvo che appoggia sulla carrucola. in b) si evidenziano le forze agenti su
un elemento infinitesimo del tratto curvo.
Per vedere con un esempio concreto quali sono le forze che agiscono su un vincolo di questo
genere, consideriamo la funicella che collega i corpi dell’apparecchio di Fletcher. Per studiare il
sistema è conveniente separare la funicella in tre parti, come mostrato in fig. 3.6.1 a: le due parti
rettilinee, rispettivamente orizzontale e verticale, e la parte che appoggia sulla carrucola e ne segue
la circonferenza. All’estremo del tratto orizzontale che è collegato al corpo 1 è applicata per il terzo
principio una forza −T i di uguale intensità e direzione ma verso opposto rispetto a quella che la
fune applica al corpo; la massa trascurabile implica che all’altro estremo del tratto orizzontale sarà
applicata una forza T i nel verso opposto, in modo da avere somma delle forze nulla. Studiamo
il tratto di funicella che è a contatto con la carrucola e scomponiamolo in elementi infinitesimi
come mostrato in fig. 3.6.1 b. Consideriamo l’elemento mostrato in figura: la congiungente il suo
centro con il centro della carrucola forma un angolo ϕ con la direzione dell’asse X. Il segmento può
essere approssimato come rettilineo e sottende un angolo infinitesimo dϕ. La carrucola esercita su
ciascun tratto una reazione infinitesima dW che impedisce alla fune di penetrare dentro di essa.
Questa reazione, se il vincolo fune–carrucola è ideale, sarà perpendicolare alla direzione del tratto
infinitesimo. Allo stesso tratto saranno applicate due forze dai segmenti di fune immediatamente
adiacenti, che saranno angolate in modo simmetrico di un angolo dϕ/2 rispetto alla direzione del
tratto sotto studio. La somma delle tensioni applicate e della reazione della carrucola deve essere
nulla, dato che il tratto è di massa trascurabile. Perché ciò sia verificato le componenti delle tensioni
ai due estremi nella direzione del tratto devono essere uguali in modulo e opposte in verso. Questo
implica, come si vede in figura, che i moduli delle tensioni applicate agli estremi devono essere
uguali. La reazione dW della carrucola deve compensare la somma delle componenti delle tensioni
perpendicolari al tratto. Ciascuna tensione ha una componente T sin(dϕ/2) � T dϕ/2 (dato il
valore infinitesimo di dϕ). Si deduce che l’intensità della reazione deve essere dW = T dϕ. Data la
posizione del tratto, possiamo scrivere la reazione in componenti cartesiane dW = T dϕ (cos ϕ i +
15
A questo stadio non risulta rigorosamente il fatto che si possa applicare al vincolo una relazione riservata ai punti
materiali, ma nel seguito si vedrà che è corretto farlo.
3.6.2
74
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
sin ϕ j). La somma di tutte le reazioni applicate dalla carrucola ai vari elementi vale
W=
�
π
2
T (cos ϕ i + sin ϕ j) dϕ = T i + T j
(3.6.1)
0
Vediamo quindi che ogni tratto della fune aderente alla carrucola ha agli estremi forze di uguale
intensità. Questo implica che all’estremità inferiore del tratto di fune aderente alla carrucola è
applicata una forza uguale in modulo a quella applicata all’estremo superiore. Di nuovo, per il
terzo principio Sul tratto di fune verticale agiscono ancora due forze T j e −T j. Si noti che, se
consideriamo l’intero tratto di fune aderente alla carrucola, la somma delle forze applicate agli
estremi e dalla carrucola vale −T i − T j + W = 0: anche su questo tratto la somma delle forze
applicate è nulla.
Infine, vorremmo soffermarci un momento sul meccanismo delle forze vincolari. Pensiamo ad
un tavolo su cui sono appoggiati oggetti diversi: su ciascuno di essi il tavolo esercita una reazione
vincolare che compensa esattamente la forza peso. Che un oggetto inanimato e semplice come
un tavolo riesca ad adeguarsi con precisione assoluta alle forze peso di corpi diversi può sembrare
paradossale. Riusciamo a spiegare il fenomeno se, guardando il tavolo più da vicino, non lo consideriamo più come un corpo rigorosamente rigido, ma dotato di una certa elasticità. Pensiamo
quindi agli oggetti come se fossero appoggiati su un tappeto elastico, che si piegherà sotto di essi
in misura tale da fornire a ciascuno l’appoggio necessario. Nel caso pratico di un tavolo, su cui
poggino oggetti di massa limitata come penne, libri, ecc., la deformazione elastica è talmente piccola da poter essere considerata trascurabile nello studio di gran parte dei fenomeni meccanici che
si potranno avere, e quindi è perfettamente lecito considerare il tavolo un corpo rigido. Qui, come
in molti altri casi, percepiamo la differenza fra la fisica e una disciplina, come la matematica, dove
le realtà sono di norma rigorose e assolute.
3.7 Forze di attrito
Quando due superfici solide strisciano l’una sull’altra o un corpo solido si muove all’interno
di un fluido si sviluppano delle forze, dette forze di attrito, che ostacolano il moto. Le forze di
attrito soddisfano a delle relazioni che qui vogliamo illustrare, precisando però subito che si tratta
di approssimazioni e non di leggi rigorose.
3.7.1 Attrito fra solidi
Nel caso di un corpo solido che appoggia su una superficie la forza di attrito si esercita tangenzialmente e, a seconda delle situazioni, può impedire che l’oggetto inizialmente fermo inizi a
muoversi, caso in cui parliamo di attrito statico, o ostacolarne il moto, nel qual caso abbiamo attrito
dinamico. Per l’attrito statico abbiamo le seguenti condizioni:
a. La forza di attrito che si esercita sul corpo, tangenzialmente alla superficie di contatto, ha
intensità e verso tali da compensare le forze che tenderebbero a farlo muovere.
b. Il modulo della forza d’attrito T non può superare una frazione della forza normale N che la
superficie esercita sul corpo, secondo un coefficiente µs che si dice coefficiente d’attrito statico
|T| ≤ µs |N|
(3.7.1)
La forza d’attrito massima che si può esercitare è data quindi da |T| = µs |N| e non dipende
75
3.7.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
dall’estensione della superficie di contatto. Il coefficiente d’attrito dipende dai materiali in
contatto, dalla levigatura delle superfici e dall’eventuale presenza di lubrificanti.
Analizziamo l’esempio del piano inclinato illustrato in fig. 3.5.1 a: le forze normali e tangenziali
esercitate sul corpo sono date dalla (3.5.3). Dato che fra esse deve valere la (3.7.1), il coefficiente
d’attrito dovrà soddisfare la condizione
µs ≥
|T|
|N|
⇒
µs ≥ tan α
(3.7.2)
Questa relazione spiega perfettamente il fatto che se, partendo con la guida orizzontale, la si inclina
progressivamente, ad un certo punto il corpo inizia a muoversi: infatti al crescere di α decresce
il modulo della forza normale N e cresce quello di T fino al punto in cui il coefficiente, finito, di
attrito statico non permette che si eserciti una forza tangenziale sufficiente a mantenere l’equilibrio.
Riguardo all’attrito statico, occorre sempre aver presente che la (3.7.1) implica la possibilità
di esercitare una forza, ma non implica che in ogni condizione sia effettivamente esercitata una
forza pari alla massima possibile. In pratica, quando è presente l’attrito statico e il corpo studiato
è inizialmente fermo rispetto alla superficie di appoggio, il procedimento corretto consiste nel
calcolare la forza tangenziale che occorre per mantenere il corpo fermo e quindi, a posteriori,
verificare se tale forza può essere esercitata con il coefficiente d’attrito statico dato. Se questo non
avviene, il corpo si muoverà e il problema dovrà essere trattato considerando attrito dinamico.
Quando un corpo striscia su una superficie con attrito si avrà una forza tangenziale che si oppone
al moto e che è data da
|T| = µd |N|
T = −µd |N| vers v
(3.7.3)
dove v è la velocità del corpo relativa alla superficie su cui sta strisciando. La forza di attrito
dinamico è quindi sempre opposta alla velocità e proporzionale al modulo della forza normale
secondo un coefficiente µd ,analogo a µs , detto coefficiente di attrito dinamico. A parità di materiali
e di condizioni, in generale µd < µs .
3.7.2 Attrito nel moto attraverso un fluido
Un oggetto solido che si muove attraverso un fluido, sia esso un gas o un liquido, è soggetto a
una forza d’attrito. L’entità della forza dipende dalla natura e dalle condizioni del fluido, dalle
dimensioni, dalla forma e dal tipo di superficie del corpo e infine dalla velocità di quest’ultimo
rispetto al fluido. Ferme restando le altre condizioni, la forza d’attrito generalmente aumenta con
la velocità: in molti casi al di sotto di una velocità limite, dipendente anch’essa dai fattori sopra
citati, la forza d’attrito è proporzionale alla velocità e vale quindi
Fa = −λ v
(3.7.4)
Questa situazione prende il nome di regime di attrito viscoso e il coefficiente λ è il coefficiente di
attrito viscoso.
3.8 Integrazione delle equazioni di moto
Le leggi di Newton consentono di ricavare l’accelerazione di uno o più punti materiali una
volta che siano note le forze ad essi applicate. Questo significa che per un sistema meccanico
3.8
76
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
con n gradi di libertà ricaveremo un sistema di n equazioni ciascuna delle quali potrà contenere i
parametri di moto, le loro derivate prime e seconde ed eventualmente il tempo in modo esplicito. Si
tratterà di equazioni differenziali del secondo ordine, perché contengono le derivate prime e seconde
dei parametri, per di più accoppiate, ossia contenenti ciascuna come incognite più parametri. Per
conoscere il moto del sistema, ossia l’andamento temporale degli n parametri, è necessario integrare
il sistema di equazioni, eventualmente disaccoppiandole preventivamente, ossia riportandole a un
nuovo sistema in cui ciascuna equazione contiene solo uno dei parametri di moto e le sue derivate.
Questo tipo di problema è in generale molto complesso e spesso i risultati sono ottenibili solo con un
calcolo numerico approssimato, per cui risulta ben al di sopra del livello di questo testo. Tuttavia,
è utile presentare alcuni metodi di risoluzione per i casi più semplici, che verranno studiati nel
seguito. Come prima limitazione considereremo sistemi a un solo grado di libertà, per cui avremo
una sola equazione con un solo parametro, o comunque sistemi a più gradi di libertà in cui le
equazioni siano state già disaccoppiate, e contengano ciascuna un solo parametro come incognita.
Se chiamiamo x(t) il parametro di moto da studiare, il caso più generale di equazione di questo
tipo ha la forma
F (ẍ(t), ẋ(t), x(t), t) = 0
(3.8.1)
dove F è una funzione del parametro, delle sue derivate ed eventualmente del tempo. La (3.8.1)
però è solo una forma astratta di equazione, mentre noi considereremo solo casi concreti e particolarmente semplici.
3.8.1 Integrazione diretta
Il tipo più semplice di equazione di moto ha la forma
ẍ = f (t)
(3.8.2)
dove f (t) è una funzione del tempo. Questa equazione si può integrare direttamente, utilizzando
le conoscenze acquisite in un qualsiasi corso elementare di analisi matematica. Supponiamo che
l’istante iniziale in cui cominciamo a studiare il moto sia t = 0 e integriamo la (3.8.2) rispetto al
tempo
� t
� t
ẍ dt =
f (t) dt
(3.8.3)
0
0
Il primo membro della (3.8.3) ha come primitiva ẋ(t); se riusciamo a determinare, con le normali
regole di integrazione delle funzioni, la primitiva di f (t), ossia una funzione F (t) tale che dF (t)/dt =
f (t), avremo
ẋ(t) − ẋ(0) = F (t) − F (0)
(3.8.4)
La (3.8.4) permette di ricavare ẋ(t) a patto di conoscere il suo valore all’istante iniziale. Questa
è una caratteristica generale delle equazioni differenziali: se l’equazione è di ordine n, per la sua
soluzione completa occorrerà conoscere n valori detti condizioni iniziali dell’equazione. Introdotto
il valore della velocità iniziale ẋ(0),16 l’equazione assume la forma
ẋ = g(t)
16
dove g(t) = F (t) − F (0) + ẋ(0)
(3.8.5)
Possiamo parlare propriamente di velocità solo se x rappresenta una coordinata su un asse cartesiano; se, ad
esempio, x fosse un angolo avremmo una velocità angolare. In ogni caso, da ora in poi, per semplicità e per favorire
la comprensione del fenomeno fisico, supporremo che x sia una coordinata cartesiana.
77
3.8.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
La (3.8.5) è perfettamente analoga all’equazione iniziale (3.8.2) salvo per il fatto che l’incognita è
la derivata temporale prima di x(t). Si può procedere allo stesso modo e arrivare alla soluzione
x(t) − x(0) = G(t) − G(0)
(3.8.6)
dove G(t) è una primitiva di g(t). Qui compare la seconda condizione iniziale che deve essere nota,
ossia la posizione iniziale x(0).
3.8.2 Casi semplici di integrazione diretta
Il caso più semplice di integrazione diretta è quello in cui l’accelerazione è nulla: ẍ = 0
L’integrazione dà come risultato ẋ(t) − ẋ(0) = 0: questo implica che la velocità rimanga costante nel tempo, ossia mantenga il valore all’istante iniziale. Se ẋ(0) = v0 avremo ẋ = v0 . Questa
equazione si integra a sua volta, con risultato x(t)−x(0) = v0 t. Se x(0) = s0 otteniamo l’equazione
del moto rettilineo uniforme x(t) = s0 + v0 t.
Il caso immediatamente successivo è quello di accelerazione costante: ẍ = a0 . L’integrazione dà
ẋ(t) − ẋ(0) = a0 t, ossia ẋ = v0 + a0 t Integrando ancora abbiamo x(t) − x(0) = v0 t + (1/2)a0 t2 ,
ossia x(t) = s0 + v0 t + (1/2)a0 t2 , la nota equazione del moto rettilineo uniformemente accelerato.
Da un punto di vista dinamico, i due moti derivano rispettivamente da assenza di forze o da
una forza costante.
3.8.3 Separazione delle variabili
Questo metodo permette di integrare equazioni del tipo
ẋ = f (x) g(t)
(3.8.7)
Scrivendo esplicitamente la derivata abbiamo
dx
= f (x) g(t)
dt
dx
= g(t) dt
f (x)
⇒
(3.8.8)
Dove il primo membro dipende solo dalla variabile x e il secondo da t. A questo punto si può
integrare
�
x(t)
x(0)
dx
=
f (x)
�
t
g(t) dt
(3.8.9)
0
Se si riescono a trovare le primitive delle funzioni integrande per entrambi i membri, si ottiene una
relazione che collega x e t. Questo metodo può integrare anche equazioni del tipo ẍ = f (ẋ) g(t),
fornendo una relazione fra ẋ e t. In generale, il metodo non fornisce equazioni in forma esplicita
x(t) = h(t) (o l’analoga per ẋ), ma solo una relazione implicita, che non sempre è facile integrare
ulteriormente, se necessario.
3.8.4 Moltiplicazione per la derivata prima
Il metodo funziona con equazioni del tipo ẍ = f (x). Esso consiste nel moltiplicare entrambi i
3.8.4
78
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
membri per ẋ e integrare rispetto al tempo, ricordando che (d/dt)ẋ2 = 2 ẋ ẍ e che ẋ dt = dx
�
t
ẋ ẍ dt =
0
1
⇒
2
�
0
�
t
f (x) ẋ dt
0
t
d 2
ẋ dt =
dt
�
0
x(t)
⇒
f (x) dx
⇒
1 2
1
ẋ (t) − ẋ2 (0) =
2
2
�
x(t)
(3.8.10)
f (x) dx
0
Se si può determinare una primitiva di f (x) si ottiene una relazione fra ẋ2 e x.
3.8.5 Equazioni differenziali lineari a coefficienti costanti
Questo metodo permette di integrare solo un tipo particolare di equazioni, che però compaiono
non di rado nello studio di sistemi meccanici. Si tratta di equazioni del tipo17
a2 ẍ + a1 ẋ + a0 x = f (t)
(3.8.11)
dove a0 , a1 e a2 sono coefficienti reali costanti. Nel caso in cui il secondo membro sia nullo, ossia
f (t) = 0, si parla di equazione omogenea, altrimenti di equazione non omogenea. Per ogni equazione
non omogenea esiste un’equazione detta omogenea associata, che si ottiene dalla prima ponendo a
0 il secondo membro.
La teoria di questo tipo di equazioni dimostra che la soluzione generale di esse è data dalla somma
di una qualsiasi soluzione dell’equazione non omogenea e della soluzione generale dell’omogenea
associata.
La soluzione particolare può essere trovata facilmente se f (t) ha una forma semplice. Ad esempio
– se f (t) = c con c costante la soluzione particolare è x(t) = c/a0 . Infatti in questo caso ẋ(t) =
ẍ(t) = 0 e sostituendo nella (3.8.11) si verifica immediatamente che l’equazione è soddisfatta.
– Se f (t) = b0 + b1 t + b2 t2 + . . . + bn tn , ossia un polinomio di ordine n in t, la soluzione è a sua
volta un polinomio in t dello stesso ordine, x(t) = c0 + c1 t + c2 t2 + . . . + cn tn dove i valori dei
coefficienti ci devono essere determinati sostituendo l’espressione di x e quelle che ne derivano
per ẋ e ẍ nella (3.8.11) e imponendo che essa sia soddisfatta per ogni valore di t.
– Se f (t) = b cos(ω t + φ) la soluzione è del tipo x(t) = c cos(ω t + ϕ), dove i coefficienti c e ϕ
vanno calcolati come nel caso precedente.
La soluzione generale dell’omogenea associata si ottiene col procedimento che segue: dall’equazione differenziale si ricava un’equazione algebrica sostituendo alla derivata di ordine j di x rispetto
al tempo una normale incognita αj . La nostra equazione risulterà quindi del tipo
a2 α2 + a1 α + a0 = 0
(3.8.12)
Questa equazione ammetterà due radici α1 e α2 , reali o complesse coniugate. La soluzione generale
dell’equazione differenziale omogenea ha la forma
x(t) = c1 eα1 t + c2 eα2 t
17
(3.8.13)
Nel seguito ci limiteremo a equazioni di ordine non superiore al secondo, ma il metodo funziona in generale con
equazioni di qualsiasi ordine.
79
3.8.5
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
dove i coefficienti c1 e c2 si ricaveranno dalle condizioni iniziali, ossia sostituendo i valori di x(0)
in essa e di ẋ(0) nell’equazione che si ottiene derivando la (3.8.13) rispetto al tempo e imponendo
che siano entrambe soddisfatte. La forma di soluzione (3.8.13) è la più adatta se le due radici sono
reali e distinte fra loro, ma esistono forme diverse per casi particolari:
– Se le radici sono reali e coincidenti, α1 = α2 , la soluzione è x(t) = (b1 + b2 t) eα1 t , con b1 e b2
costanti da determinare.
– Se le radici sono complesse coniugate, del tipo α = γ ± i δ la soluzione può essere messa nella
forma x(t) = d eγ t cos(δ t + φ) dove i coefficienti d e φ di determinano dalle condizioni iniziali.
Un caso particolare si ha quando a1 = 0, per cui l’equazione omogenea associata ha la forma
a2 ẍ + a0 = 0, se a2 e a0 dello stesso segno. In questo caso l’equazione può essere posta nella
forma ẍ + ω 2 x = 0 e la soluzione è del tipo x(t) = d cos(ω t + φ) dove le costanti d e φ si
ricavano dalle condizioni iniziali.18 Un moto con questa equazione di moto si definisce armonico
semplice.
3.9 Esempi di studio di moti
Diamo qui la risoluzione di alcuni problemi di moto, sia per l’importanza dei fenomeni relativi,
sia con lo scopo di introdurre lo studente alla metodica corretta di svolgimento. Lo studio di un
moto si può suddividere in una serie di fasi:
a. Caratterizzazione cinematica. Si analizza il sistema dal punto di vista delle sue caratteristiche
di moto, rilevando il numero di gradi di libertà e quanti di essi siano effettivamente interessati
dal moto. Si scelgono opportuni sistemi di riferimento e i parametri di moto. In questa fase
un errore tipico del principiante è quello di voler andare troppo oltre, cercando di prevedere già
quello che si potrà conoscere solo dopo aver utilizzato la (3.4.2).
b. Studio delle forze. Per ogni corpo di cui si deve studiare il moto si traccerà il diagramma di
corpo libero, ossia un disegno in cui compaiono tutte le forze (reazioni vincolari comprese) che
agiscono su di esso.
c. Scrittura delle equazioni della dinamica. Applicando la (3.4.2) a ciascun corpo si scriveranno le
equazioni del moto in forma differenziale.
d. Integrazione delle equazioni di moto. Si integrano le equazioni differenziali ottenute per quanto
possibile, arrivando nel migliore dei casi a espressioni esplicite dei parametri di moto in funzione
del tempo, ossia alla soluzione finale, o comunque fin dove è possibile arrivare.
e. Analisi dei risultati. È sempre utile, anzi, necessario analizzare le formule ottenute alla luce
di quello che i principi e – perché no – anche il senso comune ci suggeriscono, controllare la
plausibilità dei risultati ottenuti, verificandola magari in casi particolari in cui la soluzione è
più semplice, e, in caso questi siano paradossali, capire se si è commesso un errore (caso di gran
lunga più probabile) o se effettivamente il sistema studiato evolve in un modo che contrasta
quello che ci saremmo aspettati.
Non si può far a meno di notare che in molti corsi di fisica tenuti alle scuole medie superiori
per la mancanza da parte degli studenti di conoscenze di calcolo infinitesimale (uno strumento
tanto importante per la meccanica da essere stato creato al tempo stesso in cui questa veniva
forgiata, nel caso di Newton da una stessa persona) si finisce per fare una rassegna “zoologica”,
nel senso puramente descrittivo del termine, di un certo numero di moti (rettilineo uniforme,
rettilineo uniformemente accelerato, circolare uniforme, ecc.) e per non sottolineare come solo il
secondo principio, tramite la (3.4.2) fornisca lo strumento per risolvere i problemi di moto. Gli
18
È noto dalla trigonometria che le funzioni del tempo A sin(ω, t + φ), B cos(ω t + ϕ) e C sin ω t + D cos ω t, con
opportuna scelta delle coppie di parametri (A, φ) (B, ϕ), (C, D) possono essere portate ad un identico andamento.
Quindi può essere usata una qualsiasi delle tre varianti.
3.9
80
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
studenti finiscono cosı̀ per pensare che F = m a sia solo una delle tante formule da imparare a
memoria per fare buona figura all’esame, anzi, per citare il prof. Manlio Mandò, “quella formula
che sta fra il polispasto [una sorta di paranco] e l’igrometro a capello”.19 Da questo deriva che essi
cerchino di risolvere i problemi meccanici semplicemente scegliendo uno dei moti studiati come il
più “consono” al sistema in esame e applicandone pedissequamente le formule, senza passare dalle
equazioni di moto che provengono dal secondo principio. Spesso poi a questo si aggiunge la sicumera
di considerare costanti grandezze, ad esempio le accelerazioni, che nel caso non lo sono affatto,
arrivando a risultati addirittura grotteschi. A volte purtroppo questo modus operandi persiste anche
in studenti che affrontano corsi di fisica a livello universitario, ma non è assolutamente accettabile
da parte di alcun docente che abbia a cuore anche solo la dignità della materia insegnata: pertanto
si consigliano gli studenti di osservare attentamente come vengono risolti gli studi di moto che
seguono, non per impararli a memoria, ma per “incorporare” il procedimento fisicamente corretto.
3.9.1 Moto di un oggetto lanciato
Vogliamo studiare il moto di un corpo che sia stato lanciato, sulla superficie terrestre, imprimendogli una velocità iniziale di modulo v0 , inclinata di un angolo α rispetto all’orizzontale. Nel
nostro studio trascureremo la presenza dell’attrito dell’aria sul corpo in movimento; la nostra soluzione sarà corretta, almeno in buona approssimazione, ad esempio, per un sasso lanciato da un
bambino, ma non lo sarebbe per una palla da baseball lanciata da un pitcher professionista (che
può toccare i 170 km/h) o per il proiettile di un’arma da fuoco (che in molti casi esce dalla canna
a velocità supersonica, ossia superiore a � 1200 km/h). Allo stesso modo, ma per motivo diverso,
non si potrebbe trascurare l’attrito dell’aria nel lancio di una foglia secca d’albero o di una piuma.
Iniziamo la caratterizzazione cinematica osservando che il corpo (schematizzato come punto
materiale), una volta lanciato, avrà tre gradi di libertà. Scegliamo un sistema di riferimento avente
l’origine nel punto in cui il corpo è abbandonato nel lancio, l’asse X orizzontale, l’asse Y verticale;
scegliamo poi direzione e verso dell’asse X in modo tale che il vettore velocità iniziale si trovi nel
piano XY , e più precisamente nel primo quadrante.
4
m
y
3
mg
2
1
v0
α
O
2
4
6
8
m
x
10
Fig. 3.9.1: Un oggetto di massa m lanciato con velocità iniziale in modulo v0 , inclinata di un angolo
α rispetto all’orizzontale. È raffigurato il piano XY in cui avviene il moto.
L’asse Z sarà diretto in orizzontale in modo da completare una terna destrorsa (in fig. 3.9.1 sarebbe uscente dal foglio). Prendiamo come istante iniziale t = 0 quello in cui il corpo è abbandonato
19
Manlio Mandò, Lezioni di Fisica Generale – Parte prima – I fondamenti della meccanica, Libreria Universitaria
L. Tinarelli, Bologna, 1968, pag. 107.
81
3.9.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
nel lancio. Avremo come condizioni iniziali
x(0) = 0
y(0) = 0
z(0) = 0
ẋ(0) = v0 cos α
ẏ(0) = v0 sin α
ż(0) = 0
(3.9.1)
Sul corpo agisce esclusivamente la forza peso pari a −mg j. Possiamo scrivere quindi le equazioni
di moto
m ẍ = 0
m ÿ = −mg
(3.9.2)
m z̈ = 0
Possiamo integrare facilmente una prima volta le (3.9.2) secondo quanto trovato in 3.8.2
ẋ = v0 cos α
ẏ = v0 sin α − g t
ż = 0
(3.9.3)
Si possono integrare le (3.9.3) allo stesso modo
x = v0 cos α t
y = v0 sin α t − 12 g t2
z=0
(3.9.4)
Le (3.9.4) danno le coordinate del punto in funzione del tempo e costituiscono la soluzione completa
del problema di moto.Vediamo innanzitutto che il moto si mantiene nel piano XY e non si ha
spostamento in direzione Z. Questo deriva ovviamente dal fatto che il corpo inizialmente non ha
una componente di velocità in questa direzione e per tutta la durata del moto le forze applicate
hanno pure componente nulla lungo Z. Una situazione cosı̀ palese poteva essere anche verificata a
priori, nelle fasi a e b della risoluzione, in modo da limitare subito lo studio del moto ai gradi di
libertà in cui si svolge.
Vediamo poi che il moto orizzontale si svolge a velocità costante, mentre quello lungo la verticale
risulta uniformemente accelerato.
Possiamo ottenere anche facilmente l’equazione della traiettoria, ricavando t dalla prima delle
(3.9.4) e sostituendolo nella seconda. Abbiamo
y = tan α x −
2v02
g
x2
cos2 α
(3.9.5)
ossia una parabola, come è noto. Possiamo calcolarci la gittata xg , che nel nostro sistema coincide
con il valore di x per cui il proiettile tocca di nuovo terra, ossia y = 0
xg = 2
3.9.1
v02
v2
sin α cos α = 0 sin 2α
g
g
82
(3.9.6)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
m
8
6
x(t)
4
2
y(t)
0.2
0.4
0.6
0.8
s 1.0
Fig. 3.9.2: Grafici di x(t) e y(t) per il moto dell’oggetto lanciato. Velocità iniziale 10 m · s−1 , angolo
α = π/6.
A titolo di esercizio, effettuiamo dei controlli sulla formula ottenuta (controlli che dovranno diventare una buona abitudine per chi intende dedicarsi a questo tipo di problemi)
– Controllo dimensionale. Il termine v02 /g ha dimensioni (L2 · T−2 )/(L · T−2 ) = L, come deve
essere.
– Controllo di plausibilità. La gittata risulta tanto maggiore quanto maggiore è la velocità di
lancio, mentre decresce al crescere dell’accelerazione di gravità.
Possiamo infine cercare il massimo della gittata, che si ha quando sin 2α = 1 ossia α = π/4.
5
m
7π/16
4
3π/8
3
5π/16
π/4
2
3π/16
1
π/8
π/16
0
2
4
6
8
10 m
Fig. 3.9.3: Grafici delle traiettorie del proiettile lanciato con differenti valori dell’angolo iniziale.
Velocità iniziale 10 m · s−1 .
Per qualsiasi problema di questo genere vi sono parecchie domande che uno studente farebbe
bene a porsi per trovare una risposta: ad esempio, in fig. 3.9.3 si vede come si possa ottenere la
stessa gittata con angolazioni iniziali diverse; in quali casi il proiettile impiega meno o più tempo
a toccare di nuovo il terreno?
3.9.2 Oggetto che cade in un liquido viscoso
Vogliamo studiare il moto di una biglia metallica che viene lasciata cadere da ferma in un tubo
83
3.9.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
.
λx
mg
x
Fig. 3.9.4: Corpo che cade in un liquido viscoso.
verticale contenente un liquido viscoso, ad esempio olio.
Scegliamo un riferimento con l’asse X diretto verso il basso e l’origine alla superficie del liquido,
da dove il corpo viene lasciato cadere. Prendiamo l’origine dei tempi al momento del rilascio.
Anche in questo caso il corpo, schematizzato come un punto materiale, ha 3 gradi di libertà, ma
possiamo facilmente vedere che il moto si svilupperà solo secondo la verticale: all’istante iniziale il
corpo ha velocità nulla ed è soggetto alla forza peso, per cui comincerà ad accelerare e acquisterà
una velocità diretta verso il basso. Appena la velocità del corpo è diversa da 0 il liquido comincia
ad esercitare su di esso una forza di attrito viscoso proporzionale alla velocità e diretta in senso
opposto ad essa, ossia, almeno inizialmente, secondo la verticale ascendente. Il moto del corpo
rimane quindi su una traiettoria verticale e anche in tutto lo sviluppo successivo non si creano
altre forze in direzione orizzontale. Questo risultato ci permette di studiare il moto semplicemente
nella direzione dell’asse X che abbiamo scelto. Le nostre condizioni iniziali saranno x(0) = 0 e
ẋ(0) = 0.
Sul corpo agisce la forza peso mg i e la forza di attrito viscoso −λ ẋ i. Scriviamo la (3.4.2) nella
sua componente X e abbiamo
m ẍ = m g − λ ẋ
(3.9.7)
se introduciamo una nuova costante η = λ/m e dividiamo per m membro a membro abbiamo
l’equazione di moto
ẍ = g − η ẋ
(3.9.8)
A titolo di esercizio, integriamo l’equazione di moto con due metodi diversi. Iniziamo con il metodo
di separazione delle variabili. Se scriviamo ẍ esplicitamente come dẋ/dt abbiamo
dẋ
= g − η ẋ
dt
⇒
dẋ
= dt
g − η ẋ
(3.9.9)
Integrando entrambi i membri si ha
�
ẋ(t)
ẋ(0)
3.9.2
dẋ
=
g − η ẋ
84
�
0
t
dt
(3.9.10)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
L’integrale al secondo membro è semplicemente t; per quello al primo membro effettuiamo una
sostituzione introducendo una nuova variabile z = g − η ẋ, per cui dz = −η dẋ
1
−
η
�
g−η ẋ
g
dz
=t
z
(3.9.11)
dove si è già tenuto conto del fatto che ẋ(0) = 0. Una funzione primitiva di 1/z è ln z per cui
1
g−η ẋ
− [ln z]g
=t
η
�
�
1
η
− ln 1 − ẋ = t
η
g
⇒
(3.9.12)
La (3.9.12) può essere facilmente invertita in modo da ottenere ẋ(t)
ẋ =
�
g �
1 − e−η t
η
(3.9.13)
2.0
m/s
1.5
1.0
0.5
0.0
0.5
1.0
1.5
s
2.0
Fig. 3.9.5: Velocità di un corpo che cade in un mezzo viscoso, in funzione del tempo. η = 5 s−1 .
È interessante soffermarci ad analizzare questo risultato: la velocità parte da un valore nullo
e aumenta nel tempo ma sempre più lentamente, andando a stabilizzarsi sul valore limite g/η.
Questo è quanto si ricava da un’analisi qualitativa del fenomeno; inizialmente l’accelerazione del
corpo è quella di gravità g ma via via che aumenta la velocità aumenta la forza d’attrito e quindi l’accelerazione diminuisce. Asintoticamente si raggiunge la velocità per cui la forza d’attrito
compensa esattamente la forza peso, come si vede dalla (3.9.8), e non si ha più accelerazione.
La (3.9.13) può essere integrata direttamente per ottenere x(t)
�
0
t
ẋ dt =
�
0
t
�
g �
1 − e−η t dt
η
85
⇒
x=
�
g
g �
t − 2 1 − e−η t
η
η
(3.9.14)
3.9.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
0.8
m
a)
4
m
0.6
3
0.4
2
0.2
1
0.0
0.1
0.2
0.3
0.4
s
b)
0.0
0.5
0.5
1.0
1.5
s
2.0
Fig. 3.9.6: Spostamento di un corpo che cade in un mezzo viscoso, in funzione del tempo. In a)
sono evidenziati gli istanti iniziali. η = 5 s−1 .
La (3.9.14) esprime il fatto che il moto è inizialmente accelerato ma tende successivamente a
diventare uniforme, al raggiungimento della velocità limite.
Vogliamo mostrare come si può integrare l’equazione di moto usando la procedura per le equazioni differenziali lineari a coefficienti costanti. La (3.9.8) può essere infatti scritta nella forma
ẍ + η ẋ = g
(3.9.15)
Una soluzione particolare dell’equazione è data da x = (g/η) t; sostituendo questo valore nella (3.9.15) si vede che è identicamente soddisfatta. Per determinare la soluzione generale dell’equazione omogenea associata, costruiamo l’equazione algebrica corrispondente
α2 + η α = 0
⇒
�
α=0
α = −η
(3.9.16)
La soluzione dell’equazione risulta dunque
x=
g
t + c1 + c2 e−η t
η
(3.9.17)
dove c1 e c2 sono due costanti da determinare in base alle condizioni iniziali
�
x(0) = 0
ẋ(0) = 0
⇒
⇒
c1 + c2 = 0
g
η − η c2 = 0
⇒
�
c1 = − ηg2
c2 = ηg2
(3.9.18)
Sostituendo nella (3.9.17) i valori delle costanti c1 e c2 si ottiene di nuovo la (3.9.14).
3.9.3 Moto di un corpo sotto l’effetto di una molla ideale
Vogliamo studiare un corpo che si trova su una guida rettilinea orizzontale priva di attrito, a
cui è attaccato un capo di una molla ideale disposta orizzontalmente, con l’altro estremo fisso.
Definiamo molla ideale un dispositivo di lunghezza di riposo l0 , che se allungato o compresso a una
lunghezza differente l esercita una forza di richiamo F = −k(l − l0 ). La forza tende a riportare
3.9.3
86
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
y
kx N
mg
O
x
Fig. 3.9.7: Moto di un corpo attaccato ad una molla ideale di costante k.
la molla alla sua lunghezza di riposo l0 ; k è detta costante della molla. Una forza di richiamo
proporzionale allo spostamento è detta in generale forza elastica.
Il nostro corpo di massa m si trova vincolato dalla guida a muoversi solo lungo l’orizzontale
(salvo forze che lo spingessero a staccarsi dalla guida). Scegliamo un sistema di riferimento con
l’asse X diretto lungo la guida e scegliamo l’origine in modo che corrisponda alla posizione per cui
la molla risulta a riposo.
In direzione verticale sul corpo agiscono la forza peso −mg j e la reazione vincolare N che la
compensa esattamente. In direzione orizzontale agisce la forza −k x i dovuta alla molla. Se il corpo
fosse inizialmente fermo in x = 0 anche questa forza si annullerebbe ed esso non si muoverebbe.
Consideriamo invece la situazione in cui il corpo viene spostato (per mezzo di altre forze, dovute,
ad esempio, allo sperimentatore) in una posizione x = x0 e abbandonato da fermo. Fissiamo in
questo istante l’origine dei tempi, cosı̀ che le condizioni iniziali risultano x(0) = x0 , ẋ(0) = 0.
Scriviamo la (3.4.2) in direzione orizzontale
m ẍ = −k x
(3.9.19)
Introducendo una costante ω 2 = k/m l’equazione di moto si può porre nella forma
ẍ + ω 2 x = 0
(3.9.20)
L’equazione differenziale (3.9.20) è lineare a coefficienti costanti,del tipo omogeneo. La soluzione
è data in 3.8.5 e si può mettere nella forma
x = d cos(ωt + φ)
(3.9.21)
Le condizioni iniziali consentono di calcolare le costanti d e φ.20
�
20
x(0) = x0
ẋ(0) = 0
⇒
⇒
d cos φ = x0
−d ω sin φ = 0
⇒
�
d = x0
φ=0
(3.9.22)
La seconda delle (3.9.22) è soddisfatta per d = 0, che però non è una soluzione accettabile, in quanto impedirebbe
di soddisfare la prima equazione (e corrisponderebbe a una situazione in cui il corpo resta sempre fermo in x = 0,
incompatibile con le condizioni iniziali); le altre possibili soluzioni sono φ = 0 e φ = π. Prendendo φ = 0 e
sostituendo nella prima equazione si ottiene d = x0 e quindi x = x0 cos(ω t); prendendo φ = π si ottiene d = −x0 ,
ma cos(α + π) = − cos α per cui le soluzioni sono equivalenti.
87
3.9.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
L’equazione integrata del moto risulta quindi
x = x0 cos
1.0
m
��
�
k
t
m
(3.9.23)
x(t)
0.5
-0.5
2
4
6
8
s
10
2
4
6
8
s
10
-1.0
1.0
m/s
0.5
-0.5
.
x(t)
-1.0
Fig. 3.9.8: Grafici dello spostamento e della velocità per un moto armonico, con
Riguardo a questo moto possiamo fare diverse considerazioni:
�
k/m = 1 s−1 .
– Il moto è periodico e riprende lo stesso andamento ogni volta che l’argomento della funzione
trigonometrica cresce di 2π. Possiamo associare al moto un periodo T e una frequenza f
T =
2π
ω
f=
1
ω
=
T
2π
(3.9.24)
Il periodo rappresenta il tempo dopo il quale il moto riprende le sue caratteristiche, la frequenza
il numero di periodi che hanno luogo in un secondo. La frequenza si misura in Hertz (Hz), dove
1 Hz = 1 s−1 . La quantità ω si chiama invece pulsazione e si misura in rad · s−1 . Frequenza
e pulsazione sono fra loro proporzionali: ω = 2π f . Per moti di questo tipo si parla anche di
oscillazioni armoniche.
– Anche la velocità in un moto armonico ha un andamento sinusoidale, ma sfasato di π/2 rispetto
allo spostamento: quando lo spostamento è al massimo la velocità è nulla, e viceversa.
– Questo tipo di moto è particolarmente importante perché molti oggetti, se deformati leggermente
dall’interazione con altri, rispondono con forze di richiamo proporzionali alla loro deformazione,
ossia elastiche.
3.9.4 Pendolo semplice
Vogliamo studiare il moto di un corpo che è attaccato a una funicella inestensibile, di massa
trascurabile e lunghezza l, avente l’altro estremo fissato. Le dimensioni lineari del corpo devono
essere molto minori di l, in modo da poterle trascurare al confronto. L’oggetto viene tenuto fermo
con la funicella tesa ad un angolo ϕ0 rispetto alla verticale discendente e abbandonato.
Scegliamo un sistema di riferimento con l’origine nel punto fisso della funicella e l’asse X diretto
secondo la verticale discendente. Scegliamo la direzione dell’asse Y in modo che il corpo si trovi
3.9.4
88
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
inizialmente nel piano XY . Il corpo è soggetto alla forza peso m g i e alla reazione N della funicella,
che sarà diretta lungo di essa. Sul corpo quindi non agiscono forze al di fuori del piano XY : il
moto iniziale sarà in tale piano, per cui anche agli istanti successivi non si avranno forze fuori del
piano XY e il moto vi sarà confinato. Se al corpo avessimo impresso una velocità iniziale con
componente non nulla fuori da tale piano, il moto non sarebbe stato più confinato e avremmo
avuto quello che si chiama un pendolo sferico, sistema molto più complesso da studiare.
O
ϕ
y
l
n
P
N
t
mg
x
Fig. 3.9.9: Pendolo semplice.
Notiamo poi che il vincolo costituito dalla funicella è unilatero: essa può opporsi a che il corpo
vincolato si allontani dall’estremo O più della sua lunghezza l, mediante una reazione vincolare N
esercitata su P e diretta verso O, ma non potrebbe impedire un moto per cui P si avvicinasse a
una distanza da O minore di l, perché in tal caso la fune rimarrebbe lasca e non eserciterebbe forze.
Per studiare il problema, supponiamo di sostituire la fune con una sbarra rigida di massa trascurabile, che potrebbe fornire una reazione N anche diretta radialmente verso l’esterno, risolviamo
le equazioni di moto, calcoliamo N e verifichiamo che abbia il verso possibile per la funicella.
In questo caso risulta estremamente conveniente scomporre le forze e le accelerazioni secondo una
direzione radiale, indicata dal versore n in fig. 3.9.9, e una tangenziale, con verso positivo quando
l’angolo ϕ cresce, indicata dal versore t. L’accelerazione del punto P è data dalle espressioni (2.8.9)
e (2.8.10)
aP = l ϕ̈ t + l ϕ̇2 n
(3.9.25)
Al corpo sono applicate la forza peso m g i e la reazione vincolare N = N n. Scriviamo le equazioni
di moto proiettate lungo i versori t e n
m lϕ̈ = −m g sin ϕ
m l ϕ̇2 = N − m g cos ϕ
(3.9.26)
A questo punto qualcuno potrebbe obiettare che un sistema di riferimento con gli assi orientati come
t e n non è inerziale, per cui non si può scrivere la (3.4.2). L’obiezione sarebbe dettata da un sano
scrupolo, ma non giustificata: l’accelerazione espressa dalla (3.9.25) infatti è quella che misurerebbe
un osservatore solidale con il sistema inerziale OXY e noi ci siamo limitati a scomporre l’equazione
F = m a secondo direzioni che variano nel tempo. Dato il carattere vettoriale dell’equazione, una
volta che questa contenga gli elementi valutati in un sistema di riferimento inerziale può essere
scomposta istante per istante in un qualsiasi sistema di riferimento. Le (3.9.26) si possono scrivere
89
3.9.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
come
ϕ̈ = − gl sin ϕ
(3.9.27)
N = m g cos ϕ + m l ϕ̇2
La prima delle (3.9.27) contiene l’informazione necessaria per ricavare il moto del punto, mentre
la seconda permette di ricavare istante per istante il valore della reazione vincolare e verificare che
corrisponda a quanto ottenibile da una funicella, ossia N ≥ 0. Vediamo subito che se l’angolo
iniziale ϕ0 > π/2, essendo le condizioni iniziali ϕ(0) = ϕ0 e ϕ̇(0) = 0, risulta N < 0, per cui
limiteremo lo studio ai casi in cui ϕ0 ≤ π/2.21
Possiamo integrare la prima delle (3.9.27) moltiplicando entrambi i membri per ϕ̇
�
0
t
ϕ̇ ϕ̈ dt = −
g
l
�
0
t
sin ϕ ϕ̇ dt
⇒
1 2
1
g
ϕ̇ (t) − ϕ̇2 (0) = −
2
2
l
�
ϕ(t)
sin ϕ dϕ
(3.9.28)
ϕ(0)
Sostituendo nella (3.9.28) i valori delle condizioni iniziali abbiamo
ϕ̇2 =
2g
(cos ϕ − cos ϕ0 )
l
(3.9.29)
Questa equazione non costituisce una soluzione completa ed esplicita per il moto, come sarebbe la
conoscenza della funzione ϕ(t), ma fornisce molte informazioni utili:
– Dato che ϕ̇2 non può essere negativo, il moto è confinato nell’intervallo per cui cos ϕ ≥ cos ϕ0 ,
ossia −ϕ0 ≤ ϕ ≤ ϕ0 .
– All’istante iniziale ϕ̇ = 0 e ϕ̈ < 0: il corpo inizia a muoversi verso valori di ϕ minori, come
suggerisce anche l’esperienza quotidiana. La velocità cresce
� in modulo via via che il corpo si
avvicina alla posizione più bassa, ϕ = 0, per cui ϕ̇ = − (2g/l)(1 − cos ϕ0 ). Superato questo
punto, il corpo procede nella zona in cui ϕ < 0, riprendendo gli stessi valori di velocità che
aveva prima e arrivando a fermarsi in ϕ = −ϕ0 . A questo punto il moto si inverte e il corpo
ripercorre la traiettoria in senso inverso, con moto perfettamente speculare al precedente, fino
ad arrivare a fermarsi nel punto iniziale. Il moto risulta quindi in una oscillazione periodica fra
i valori dell’angolo −ϕ0 e ϕ0 .
La (3.9.29) potrebbe essere ulteriormente integrata per separazione delle variabili
�
dϕ
2g
=±
(cos ϕ − cos ϕ0 )
dt
l
⇒
dt = ± �
dϕ
2g
l (cos ϕ
− cos ϕ0 )
(3.9.30)
Nella (3.9.30) il segno del secondo membro va scelto a seconda del segno della velocità nel tratto di
percorso in cui si sta integrando. Sussiste poi una difficoltà matematica dovuta al fatto che la funzione integranda al secondo membro non ha una primitiva esprimibile mediante una combinazione
21
Che la funicella non costituisca vincolo sufficiente in caso di ϕ0 > π/2 si può ricavare anche solo in base al senso
comune. Se infatti ϕ0 = π/2 + α, con 0 < α < π/2, il corpo abbandonato da fermo cade direttamente verso il
basso, fino al punto in cui la sua distanza da O diventa di nuovo uguale a l, e questo avviene con ϕ = π/2 − α. A
questo punto la funicella si tende improvvisamente e si ha un fenomeno che la meccanica classifica fra gli urti, il cui
risultato non è prevedibile banalmente.
3.9.4
90
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
finita di funzioni trascendenti elementari (ossia funzioni trigonometriche, logaritmi, esponenziali,
ecc.). L’integrale stesso definisce una funzione di nuovo tipo, che appartiene alla classe dei cosiddetti integrali ellittici. I valori possono essere ottenuti per approssimazione numerica. In particolare
possiamo calcolare numericamente il periodo T del moto oscillatorio, osservando che un’oscillazione
consta di 4 fasi: da ϕ0 a 0, da 0 a −ϕ0 , da −ϕ0 a 0, da 0 a ϕ0 e che in ciascuna fase |ϕ̇| dipende
punto per punto solo da |ϕ|, mentre il segno di ϕ̇ è negativo nelle prime due fasi e positivo nelle
altre. Questo implica che ciascuna fase del moto sia percorsa in uno stesso tempo, per cui
T =4
�
l
2g
�
ϕ0
0
dϕ
�
(cos ϕ − cos ϕ0 )
(3.9.31)
L’integrale della (3.9.31) è improprio, in quanto la funzione integranda diverge in ϕ = ϕ0 , ma
risulta comunque in un valore finito, che dipende dall’estremo di oscillazione ϕ0 .
2.5
s
2.0
1.5
1.0
0.5
0.0
0º
20º
40º
60º
80º
Fig. 3.9.10: Periodo di un pendolo semplice di lunghezza l = 1 m in funzione dell’ampiezza di
oscillazione espressa in gradi (con g = 9.810 m · s−2 ).
In fig. 3.9.10 è mostrato il periodo di un pendolo semplice di lunghezza l = 1 m soggetto all’accelerazione di gravità g = 9.810 m · s−2 in funzione dell’angolo ϕ0 da cui il corpo viene abbandonato, espresso in gradi.22 Si vede che, al crescere di ϕ0 da valori prossimi a 0 fino a π/2, il periodo
varia circa nell’intervallo (2.0, 2.4) s. La tabella 3.9.1 riporta il periodo del pendolo e il rapporto
fra questo e il periodo delle piccole oscillazioni (vedere oltre).
22
Lo zero finale nel valore di g indica che si considera il valore conosciuto fino alla quarta cifra significativa.
91
3.9.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
ϕ0
T [s]
T /Tpo
◦
5
2.007
1.000
10
2.010
1.002
20
2.021
1.008
30
2.041
1.017
◦
40
2.069
1.031
50◦
2.106
1.050
60
2.153
1.073
70
2.211
1.102
80
2.282
1.1372
90
2.368
1.180
◦
◦
◦
◦
◦
◦
◦
Tab. 3.9.1: Periodo di un pendolo semplice di lunghezza l = 1 m in funzione dell’ampiezza di
oscillazione espressa in gradi (con g = 9.810 m · s−2 ).
Non c’è da stupirsi del fatto che Galileo Galilei, con le possibilità limitatissime che aveva per
misurare il tempo (basandosi sul battito del polso o sul calare del livello del liquido in un recipiente
con un foro) ritenne isocrone le oscillazioni del pendolo indipendentemente dalla loro ampiezza.
Ma in effetti la sua conclusione, anche se non rigorosamente esatta, è sostanzialmente verificata
se l’ampiezza rimane limitata (in un ambito di 20◦ varia meno dell’1%), e costituı̀ un elemento
importante per la comprensione della meccanica.
Possiamo trattare come caso particolare quello delle cosiddette piccole oscillazioni, che si ha
quando ϕ0 � 1 rad. Avremo, per un noto teorema di trigonometria, sin ϕ � ϕ e potremo riscrivere
la prima delle (3.9.27) come
ϕ̈ +
g
ϕ=0
l
(3.9.32)
Questa equazione risulta identica alla (3.9.20) con ω 2 = g/l; si può quindi utilizzare la stessa
soluzione arrivando al risultato (con le condizioni iniziali date)
ϕ = ϕ0 cos
��
�
g
t
l
(3.9.33)
Il moto delle piccole oscillazioni di un pendolo semplice risulta quindi armonico con periodo
Tpo = 2π
�
l
g
(3.9.34)
Vogliamo infine studiare il moto del pendolo semplice con condizioni iniziali diverse, ossia: si
lancia il corpo all’istante iniziale dalla posizione ϕ(0) = 0 con una velocità tale che ϕ̇(0) = ω0 . Le
equazioni di moto (3.9.27) non cambiano al cambiare delle condizioni iniziali e si possono integrare
con lo stesso procedimento usato sopra. Con le nuove condizioni iniziali otteniamo
ϕ̇2 = ω02 −
3.9.4
2g
(1 − cos ϕ)
l
92
(3.9.35)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Se introduciamo un parametro adimensionale λ = ω02 l/g possiamo riscrivere la (3.9.35) come
ϕ̇2 =
g
(λ − 2 + 2 cos ϕ)
l
(3.9.36)
Introducendo questo risultato nella seconda delle (3.9.27) possiamo esprimere la reazione vincolare
in funzione di ϕ
N = m g (λ − 2 + 3 cos ϕ)
(3.9.37)
Vediamo adesso l’informazione che la (3.9.36) e la (3.9.37) danno sul moto del pendolo: dovendo
essere sempre ϕ̇2 ≥ 0 avremo la disuguaglianza
cos ϕ ≥
2−λ
2
(3.9.38)
Dovendo poi essere, dato il vincolo unilatero N ≥ 0 avremo
cos ϕ ≥
2−λ
3
(3.9.39)
Inizialmente supponiamo di sostituire la funicella con una sbarretta rigida di massa trascurabile,
in modo da non dover considerare la (3.9.39) e vediamo che al crescere della velocità iniziale, ossia
di λ. Avremo i casi seguenti
a1. Se λ ≤ 2 deve essere nel moto cos ϕ ≥ cos ϕ0 = (2 − λ)/2 ≥ 0 questo significa che l’angolo
massimo raggiunto nel primo tratto del moto risulta ϕ0 ≤ π/2. Raggiunto questo valore, il
corpo torna indietro e si stabilisce un moto oscillatorio che corrisponde esattamente a quello
studiato precedentemente.
b1. Se 2 < λ < 4 abbiamo ancora un valore limite per ϕ0 , ma con −1 < cos ϕ0 < 0, ossia con
π/2 < ϕ0 < π. Il pendolo compie oscillazioni che portano il corpo al di sopra del centro di
sospensione O.
c1. Se λ = 4 il valore limite diventa ϕ = π. Il corpo, sorretto dalla sbarretta, si ferma nella posizione
opposta a quella iniziale sulla verticale di O e rimane fermo. Tuttavia la minima perturbazione
in queste condizioni lo farebbe ripartire verso il basso in una delle due direzioni possibili.23 .
Ovviamente questa situazione è soprattutto un caso limite idealizzato, praticamente impossibile
da realizzare sperimentalmente.
d1. se λ > 4 la condizione (3.9.38) è verificata per qualsiasi valore di ϕ. Il corpo raggiunge la
posizione ϕ = π con ϕ̇ > 0 e quindi prosegue nella stessa direzione. Il moto è ancora periodico,
ma anziché oscillatorio risulta adesso rotatorio, con velocità massima in ϕ = 0 e minima in
ϕ = π.
Passiamo adesso a considerare il pendolo sorretto dalla funicella, per cui deve valere la (3.9.39)
a2. Se λ ≤ 2 soddisfare la (3.9.38) implica soddisfare anche la (3.9.39), dato che (2−λ)/2 ≥ (2−λ)/3.
Non vi è alcuna differenza rispetto al caso della sbarretta in a1.
b2. Se 2 < λ ≤ 4 la condizione (3.9.39) è soddisfatta solo se ϕ ≤ ϕ1 , con cos ϕ1 = (2 − λ)/3. Si
vede anche che π/2 < ϕ1 < ϕ0 ≤ π. Questo significa che la funicella rimane tesa solo fino al
raggiungimento dell’angolo ϕ1 , dopo di che si allenta e il corpo non è più soggetto al vincolo.
23
Questa situazione, vedremo nel seguito, si dice di equilibrio instabile.
93
3.9.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Esso continuerà il moto come un proiettile finché la sua distanza da O sarà minore di l. A
questo punto la funicella sarà di nuovo distesa e si avrà un fenomeno che la meccanica classifica
fra gli urti, dalle condizioni particolari del quale dipenderà il moto successivo.24
d2. Se 4 ≤ λ < 5 esiste comunque un valore ϕ1 < π per cui la funicella si allenta e abbiamo un moto
dello stesso tipo del precedente b2.
e2. Se λ ≥ 5 anche la (3.9.39) è verificata per qualsiasi valore di ϕ e il moto è identico a quello in
d1.
Che si debba avere λ ≥ 5 per un moto circolare con la funicella sempre tesa si poteva ricavare
anche ragionando direttamente sulla seconda delle (3.9.37): ϕ2 diminuisce via via che il corpo si
porta più in alto e al tempo stesso cos ϕ diventa sempre più negativo. Il punto più critico per
la tensione della fune si ha quindi in ϕ = π, dove il termine positivo m l ϕ̇2 deve compensare il
termine negativo −m g. La tabella 3.9.2 riassume i tipi di moto del pendolo semplice quando il
vincolo è realizzato con una sbarretta o una funicella.
λ
sbarretta
funicella
λ≤2
oscillazione
oscillazione
2<λ<4
diventa lasca
λ=4
si ferma in ϕ = π
4<λ<5
rotazione
λ≥5
rotazione
Tab. 3.9.2: Andamento del moto di un pendolo semplice con condizioni iniziali ϕ(0) = 0, ϕ̇(0) = ω0 ,
in funzione del parametro λ = ω02 l/g.
3.10 Sistemi non inerziali
Abbiamo detto che la (3.4.2) vale esclusivamente in un sistema inerziale; questo sarebbe evidente
sperimentalmente se cercassimo di ripetere gli esperimenti che ad essa hanno portato stando su un
veicolo in movimento. Vogliamo vedere tuttavia come la dinamica possa essere interpretata da un
osservatore che si trova in un sistema non inerziale.
In 2.10 abbiamo studiato come sono misurate velocità e accelerazioni da due osservatori che
si trovano solidali con due sistemi di riferimento in moto relativo. Consideriamo in particolare
la relazione fra le accelerazioni (2.10.13), supponendo che il sistema O� X � Y � Z � sia inerziale e
cerchiamo di studiare la meccanica come interpretata da un osservatore sul sistema non inerziale
OXY Z. Possiamo riscrivere sinteticamente la (2.10.13) come
a = ar + at + ac
(3.10.1)
dove a è l’accelerazione nel sistema inerziale, ar quella misurata dall’osservatore nel sistema non
inerziale, mentre at e ac sono rispettivamente l’accelerazione di trascinamento e di Coriolis. Pos24
Finché la funicella è e rimane tesa, la possiamo considerare perfettamente inestensibile, ma nel momento in cui passa
da lasca a tesa non si può trascurare la sua elasticità, ossia la forza finita con cui si oppone all’allungamento.
3.10
94
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
siamo scrivere la (3.4.2) nella forma
F = m ar + m at + m ac
(3.10.2)
L’osservatore sul sistema non inerziale vede solo l’accelerazione ar , ma se scrivesse m ar = F
nessuno dei suoi esperimenti confermerebbe la legge. Le cose invece tornerebbero a posto se
considerasse
m ar = F − m at − m ac
(3.10.3)
La (3.10.3) può sembrare una banale manipolazione algebrica della (3.10.2), ma si presta ad una
interpretazione fisica interessante: i termini −m at e −m ac corrispondono dimensionalmente a
delle forze e se indichiamo Ft = −m at , Fc = −m ac possiamo scrivere
m ar = F + Ft + Fc
(3.10.4)
La (3.10.4) suggerisce che l’osservatore posto nel sistema non inerziale, oltre alle forze che agiscono
nel sistema inerziale, rilevi agenti su ogni punto materiale P anche una forza di trascinamento e
una forza di Coriolis date, secondo la (2.10.13) dalle espressioni
ω × (P − O) + ω × [ ω × (P − O) ]}
Ft = − m {aO + ω̇
Fc = − 2 m ω × vr
(3.10.5)
dove aO e ω sono rispettivamente l’accelerazione dell’origine e la velocità angolare del sistema
non inerziale misurate in quello inerziale, e vr è la velocità misurata nel sistema non inerziale.
L’esperienza conferma esattamente questo fatto, quindi l’osservatore sul sistema non inerziale misura effettivamente Ft e Fc , che sono dette forze d’inerzia o anche forze apparenti. La differenza fra
le forze d’inerzia e le altre sta nel fatto che l’osservatore sul sistema non inerziale, mentre potrebbe
associare tutte le altre forze all’interazione fra coppie di corpi, non riuscirebbe mai a trovare per
quelle d’inerzia i corpi a cui è applicata la relativa reazione, secondo il terzo principio. In questo consiste l’aspetto apparente delle forze d’inerzia, ma l’apparenza finisce qui, perché esse sono
misurabili e producono effetti ben concreti, come sa chi purtroppo ha subito un colpo di frusta a
seguito di un tamponamento automobilistico! Proponiamo alcuni esempi in cui si evidenziano le
forze d’inerzia.
3.10.1 Sistema non inerziale che trasla rispetto a quello inerziale
Consideriamo ad esempio un osservatore su un vagone ferroviario che sta procedendo lungo un
rettilineo piano, accelerando rispetto al terreno. In questo caso un sistema di riferimento posto
sul vagone trasla rispetto a un sistema fisso, per cui ω = 0. L’accelerazione aO del sistema
di riferimento fisso sul vagone coincide con quella del vagone rispetto al terreno. Ogni punto
materiale è soggetto quindi a una forza di trascinamento Ft = −m aO diretta in senso opposto
all’accelerazione del vagone. Questo fenomeno ci è ben noto dalle nostre esperienze quotidiane con
i veicoli: se siamo su un’auto che accelera ci sentiamo spinti indietro, se frena in avanti.
Un sistema particolare soggetto a questo tipo di forze d’inerzia è il cosiddetto ascensore di
Einstein, ossia un ascensore che, sganciato dai suoi sostegni, si trova in caduta libera.
In fig. 3.10.1 è rappresentato l’oggetto in questione. Il riferimento O� X � Y � è inerziale, ad esempio solidale con l’edificio, mentre il riferimento OXY è non inerziale, solidale con l’ascensore.
95
3.10.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
O'
y'
O
y
-mgi
P
mgi
x'
x
Fig. 3.10.1: Ascensore di Einstein. In verde la forza peso, in rosso la forza d’inerzia che si misura nel sistema
di riferimento dell’ascensore.
All’interno dell’ascensore si trova un corpo P di massa m. Un osservatore solidale con il sistema
fisso vede l’ascensore cadere con accelerazione a = g i� a causa del suo peso, mentre il corpo P è
pure soggetto a una forza peso m g i� e si muove con la stessa accelerazione dell’ascensore. Se P era
fermo rispetto all’ascensore nel momento in cui questo ha cominciato a cadere, avrà lo stesso moto
dell’ascensore e quindi resterà fermo nel sistema OXY . Per l’osservatore sul sistema dell’ascensore
il corpo è soggetto alla forza peso m g i (ovviamente i = i� ), ma anche a una forza di trascinamento
−m aO = −m g i. Per lui quindi la forza totale agente su P è nulla e questo gli spiega perché
il corpo rimanga fermo “sospeso in aria” all’interno dell’ascensore. Più in generale, ogni oggetto
che si trovi dentro l’ascensore in caduta libera si muoverà rispetto all’ascensore come se fosse in
assenza di peso. L’ascensore di Einstein è un esperimento che comunque sarebbe poco conveniente
da realizzare in pratica, perché o ci accontenteremmo di farlo cadere per un tempo molto breve, o avremmo difficoltà a fermarlo senza che si provocassero danni. Tuttavia, il comportamento
dell’ascensore di Einstein è caratteristico di qualsiasi sistema di riferimento che si trovi in caduta
libera. Ad esempio, facendo percorrere ad un aereo la traiettoria che avrebbe un proiettile una
volta lanciato è possibile produrre al suo interno la condizione di assenza di peso: per ovvi problemi tecnici si può ottenere il fenomeno solo per tempi limitati, che comunque in pratica arrivano
tipicamente ai 25 s. Infine, anche un satellite artificiale si muove sotto la sola influenza della forza
di gravità per cui risulta in “caduta libera” anche se gira intorno alla Terra senza precipitarvi
sopra: gli astronauti e i materiali che si trovano all’interno risultano permanentemente in assenza
di peso.25
3.10.2 Piattaforme girevoli
Un altro tipo di sistema non inerziale che si trova comunemente in pratica e si presta ad essere
studiato senza eccessiva difficoltà è costituito da una piattaforma girevole che ruota con velocità
angolare costante intorno a un asse fisso. Per fissare le idee, prendiamo un sistema di riferimento
solidale con la piattaforma, formato dagli assi X e Y sul piano della medesima e dall’asse Z che
coincide con l’asse di rotazione. Consideriamo anche un sistema inerziale O� X � Y � Z � dove O� ≡ O,
25
Se si chiedesse a persone non esperte di fisica il motivo per cui gli astronauti sono in assenza di peso ci sentiremmo
dire spesso che ciò avviene perché “sono nello spazio, dove non c’è forza di gravità”. Questo è ben lungi da essere
vero: ad esempio la “International Space Station” orbita ad un’altitudine media di 390 km rispetto alla superficie
terrestre e la forza di gravità è l’89% di quella a terra.
3.10.2
96
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
l’asse Z � coincide con quello Z, mentre gli assi X e Y si trovano nel piano X � Y � . Le forze d’inerzia
ω = 0. Data la simmetria del sistema,
sono ancora date dalle (3.10.5) dove aO = 0, ω = ω k, ω̇
risulta conveniente usare coordinate cilindriche (r, ϕ, z) a cui corrispondono i versori ur , uϕ , k.
Si vede facilmente che i tre versori, nell’ordine dato, costituiscono una terna cartesiana destrorsa
e che per loro vale, relativamente al prodotto vettoriale, la stessa relazione ciclica delle (2.4.14),
illustrata in Fig. 2.4.4.
ur × uϕ = k
uϕ × ur = −k
uϕ × k = ur
k × uϕ = −ur
k × ur = uϕ
ur × k = −uϕ
(3.10.6)
Avremo quindi per le forze d’inerzia
Ft = − m ω k × [ ω k × (r ur + z k) ] = m ω 2 r ur
Fc = − 2 m ω k × (ṙ ur + r ϕ̇ uϕ + ż k) = 2 m ω(r ϕ̇ ur − ṙ uϕ )
(3.10.7)
Si vede immediatamente che non esistono componenti di forza d’inerzia nella direzione Z; la prima
delle (3.10.7) è una forza diretta radialmente verso l’esterno che si chiama forza centrifuga. Possiamo scrivere le equazioni di moto per un punto materiale nel sistema della piattaforma, scomposte
secondo i nostri assi
m ar = Fr + m ω 2 r + 2 m ω r ϕ̇
m aϕ = Fϕ − 2 m ω ṙ
(3.10.8)
m az = Fz
dove Fr , Fϕ e Fz sono le componenti secondo gli assi della forza totale non d’inerzia agente sul
punto.
La forza centrifuga è quella che risulta più evidente anche dall’esperienza quotidiana: tutti
sappiamo che quando ci troviamo su un veicolo in curva veniamo spinti verso l’esterno, e uno
sperimentatore sul sistema mobile potrebbe facilmente misurare questa forza con un dinamometro,
semplicemente attaccando un estremo dello strumento a un sostegno fisso e collegando il corpo
all’altro estremo.
Vogliamo, a titolo di esempio e di esercizio, studiare come sono visti dal sistema fisso e dalla
piattaforma ruotante alcuni casi semplici di moto. Trattandosi di moti che avvengono nel piano
XY potremmo considerare sempre z = 0.
Il primo moto che vogliamo studiare è quello attribuito dall’osservatore sulla piattaforma a
un oggetto che si trovi fermo al di fuori di essa: per fare un esempio concreto, pensiamo a un
osservatore che sta su una giostra e osserva un palo fissato al terreno fuori di essa, a distanza h dal
suo asse. Per un osservatore sul terreno il palo risulta ovviamente immobile, ma per chi si trova
sulla giostra (che consideriamo ruotare con ω > 0, ossia in senso antiorario) il palo si muove di moto
circolare uniforme in senso orario con velocità data da ṙ = 0, ϕ̇ = −ω. Avremo poi r̈ = ϕ̈ = 0. Se
introduciamo questi dati nelle (3.10.8) otteniamo
�
ar = −ω 2 h
aϕ = 0
(3.10.9)
L’osservatore sulla piattaforma attribuisce quindi al palo un’accelerazione centripeta perfettamente coerente con il fatto che lo vede muoversi di moto circolare uniforme; le accelerazioni
coincidono con quelle che si calcolano in base alla (2.8.22).
97
3.10.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
a)
b)
y'
y
y
y'
ω
O
x
P x'
O
x
FCo
ω
P Fcf
x'
Fig. 3.10.2: Un palo P piantato a terra vicino a una giostra (visione dall’alto). In a) un osservatore
a terra vede il palo fermo e la giostra che gira in senso antiorario. In b) Un osservatore sulla giostra vede
il palo girare in senso orario, mentre le forze centrifuga e di Coriolis provvedono la corretta accelerazione.
Come secondo esempio consideriamo un corpo che all’istante iniziale sia lanciato dal centro
della piattaforma, priva di attrito, con velocità v0 radiale. Supponiamo che il lancio avvenga nella
direzione dell’asse X e che in tale momento esso coincida con l’asse X � del sistema fisso. Un
osservatore solidale con il sistema inerziale interpreta il fenomeno molto semplicemente: il corpo
non è soggetto a forze sul piano orizzontale e quindi seguita a muoversi di moto rettilineo uniforme
lungo l’asse X � . Per l’osservatore sulla piattaforma il corpo si allontana dal centro ma allo stesso
tempo ruota in senso orario con ϕ̇ = −ω. Avremo quindi r(0) = 0, ṙ(0) = v0 , r̈ = 0, ϕ(0) = 0,
ϕ̇(0) = 0, ϕ̈ = 0. Calcolando con questi dati le componenti delle forze nelle (3.10.8) si ha
�
ar = −ω 2 r
aϕ = −2 m ω v0
(3.10.10)
che corrispondono esattamente alle accelerazioni che si determinano dalle (2.8.22).
a)
b)
y'
y
ω
O
x
y
x'
P
O
P x'
x
FCo
Fcf
y'
Fig. 3.10.3: Un punto materiale P viene lanciato con velocità v0 diretta lungo l’asse X solidale con
la giostra, la cui superficie è supposta priva di attrito, all’istante in cui questo coincide con l’asse X � del
sistema fisso. In a) il moto visto dal sistema fisso: il punto seguita a muoversi di moto rettilineo uniforme
lungo X � . In b) il moto visto dal sistema mobile: il punto percorre una traiettoria a spirale, sotto l’effetto
della forza centrifuga, diretta radialmente, e di quella di Coriolis, sempre perpendicolare alla traiettoria.
3.10.2
98
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Come ultimo esempio consideriamo un punto materiale P vincolato a muoversi lungo una guida
rettilinea priva di attrito che coincide con l’asse X solidale con la giostra. Inizialmente il punto
viene mantenuto fermo a una distanza r0 dal centro O, applicando una forza radiale che compensa
la forza centrifuga m ω 2 r0 . All’istante t = 0 si lascia libero il punto sulla guida.
Un osservatore sul sistema inerziale vede, nelle sue coordinate polari r� e ϕ� , il punto muoversi
radialmente e allo stesso tempo ruotare con ϕ̇� = ω. Sul corpo agisce la reazione vincolare della
guida N = N uϕ� , perpendicolare alla guida stessa, mentre non agiscono forze radiali. Possiamo
scrivere le sue equazioni di moto in coordinate polari, usando la (2.8.22)
�
m r̈� − m r� ω 2 = 0
2 m ω ṙ� = N
(3.10.11)
Le (3.10.10) consentono di determinare il moto radiale del punto e il valore della reazione vincolare.
Per l’osservatore sul sistema mobile il punto mantiene fisso ϕ = 0, ma è soggetto alle forze inerziali
e alla reazione vincolare della guida. Le sue equazioni di moto risultano
�
m r̈ = m r ω 2
0 = N − 2 m ω ṙ
(3.10.12)
La distanza del punto dal centro della giostra è ovviamente la stessa nei due sistemi di riferimento, ossia r = r� , per cui le (3.10.11) e (3.10.12) coincidono. Nelle (3.10.11) l’accelerazione in
direzione ur� è nulla per mancanza di forze, mentre l’accelerazione in direzione uϕ� è data dalla
reazione vincolare, mentre nel sistema mobile l’accelerazione radiale è data dalla forza centrifuga
e la reazione vincolare compensa la forza di Coriolis. Possiamo integrare le equazioni di moto: la
prima delle (3.10.12) può essere scritta nella forma r̈ − ω 2 r = 0 e risulta un’equazione lineare omogenea a coefficienti costanti. L’equazione algebrica associata è α2 − ω 2 = 0, che dà come soluzioni
α = ± ω. Conseguentemente possiamo esprimere r(t) e la sua derivata nella forma
r(t) = c1 eω t + c2 e−ω t
ṙ(t) = c1 ω eω t − c2 ω e−ω t
(3.10.13)
Le condizioni iniziali r(0) = r0 e ṙ(0) = 0 consentono di calcolare le costanti c1 e c2
r(t) =
r0
2
(eω t + e−ω t ) = r0 cosh ω t
ṙ(t) =
r0 ω
2
(eω t − e−ω t ) = r0 ω sinh ωt
(3.10.14)
Sostituendo la seconda delle (3.10.14) nella seconda delle (3.10.12) possiamo calcolare il valore
della reazione vincolare in funzione del tempo
N = 2 m ω 2 r0 sinh ω t
(3.10.15)
Il punto materiale si muove allontanandosi dal centro e via via aumenta la sua accelerazione. Questo
tipo di moto può avvenire solo per un tempo limitato, dato che la distanza dal centro aumenta
99
3.10.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
a)
b)
y'
y
y'
ω
x
P
O
N
O
x'
P
N
Fcf
FCo
x
x'
y
Fig. 3.10.4: Un punto materiale P viene abbandonato da fermo lungo una guida priva di attrito diretta lungo
l’asse X solidale con la giostra, all’istante in cui questo coincide con l’asse X � del sistema fisso. In a) il moto visto
dal sistema fisso: il punto si muove lungo una traiettoria a spirale ed è soggetto solo alla reazione vincolare N
della guida. In b) il moto visto dal sistema mobile: il punto si allontana lungo l’asse X, sotto l’effetto della forza
centrifuga, diretta radialmente, mentre la forza di Coriolis è compensata dalla reazione vincolare della guida.
esponenzialmente nel tempo e allo stesso modo cresce la reazione N , il che richiede uno sforzo
sempre maggiore al dispositivo che mantiene costante la velocità angolare della piattaforma.26
3.11 La Terra come sistema non inerziale.
Abbiamo già accennato che il moto della Terra rende non inerziale ogni sistema di riferimento
solidale con essa. La Terra ruota su se stessa in 24 h, compie un’orbita completa intorno al Sole in
365 giorni ed è partecipe del movimento dell’intero sistema solare, ma di questi tre moti il primo
è quello a cui compete un’accelerazione di gran lunga maggiore, ed è sostanzialmente quello che
produce effetti di un qualche rilievo pratico. Possiamo quindi considerare la terra come un sistema
rotante intorno al suo asse S-N con velocità angolare Ω = 2π/86400 s � 7.272 · 10−5 rad · s−1 . Allo
scopo di evidenziare gli effetti di non inerzialità, approssimeremo il pianeta come perfettamente
sferico, con raggio r = 6378 km, con accelerazione di gravità g = 9.832 m · s−2 (valore che si rileva
ai poli).
Le forze d’inerzia agenti in un sistema solidale con la Terra sono, secondo quanto visto prima per
i sistemi rotanti, la forza centrifuga e la forza di Coriolis. Se si assume un sistema con l’origine nel
centro del pianeta e l’asse Z diretto verso il polo Nord, coincidente quindi con l’asse di rotazione,
le forze sono date dalle (3.10.7).
3.11.1 Effetto della forza centrifuga sulla forza peso
Vogliamo valutare prima l’effetto della forza centrifuga e per fare questo sezioniamo la Terra con
un piano passante per l’asse di rotazione, che taglierà la superficie lungo un meridiano, e prendiamo
l’asse X nel piano stesso, come in fig. 3.11.1.
Preso un punto P fermo sulla superficie ad un angolo di latitudine γ, su di esso agiranno la
26
Nelle sezioni seguenti impareremo come specificare più rigorosamente quello che a questo punto chiamiamo genericamente “sforzo”.
3.11.1
100
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
z
m Ω2 r cos γ
P
mg
O
mg'
γ'
γ
x
Fig. 3.11.1: Effetto della forza centrifuga su un punto della superficie terrestre che si trova a una
latitudine γ. Nel disegno sono indicate la forza di gravità m g, diretta verso il centro del pianeta, la forza
centrifuga m Ω2 r cos γ diretta radialmente e perpendicolarmente all’asse di rotazione Z, la risultante
delle due forze espressa come m g � . L’entità della forza centrifuga è esagerata nel disegno rispetto a
quella di gravità, allo scopo di rendere meglio apprezzabili le relazioni geometriche.
forza di gravità e la forza centrifuga, date rispettivamente da
Fgrav = −m g cos γ i − m g sin γ k
Fcfg = m Ω2 r cos γ i
(3.11.1)
La forza centrifuga dipende solo dalla distanza di P dall’asse, pari a r cos γ, e risulta quindi nulla
al polo e massima all’equatore. Sul punto P agisce quindi la somma delle due forze
F = m [(Ω2 r − g) cos γ i − g sin γ k]
(3.11.2)
Il termine in parentesi quadre della (3.11.2) ha le dimensioni di un’accelerazione e l’equazione si interpreta con il fatto che un osservatore in P misura una forza peso a cui corrisponde un’accelerazione
��
�2
Ω2 r
�
g =g
1−
cos2 γ + sin2 γ
g
(3.11.3)
Il fattore adimensionale Ω2 r/g nella (3.11.3) vale circa 3.431 · 10−3 . L’accelerazione della forza
peso ha quindi valore massimo al polo, dove g � = g, e minimo all’equatore, dove g � = g (1−Ω2 r/g).
Inoltre la forza peso risulta non più diretta verso il centro ma forma con l’asse X un angolo γ �
γ � = arctan �
1−
sin γ
�
Ω2 r
g
cos γ
(3.11.4)
Al polo e all’equatore risulta γ � = γ mentre a latitudini intermedie γ � > γ. In tabella 3.11.1 sono
riportati i risultati numerici a diversi valori di latitudine.
101
3.11.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
γ
0◦
g � (m · s−2 )
γ�
9.798
0◦
10◦
9.799
10.037◦
20◦
9.802
20.06◦
30◦
9.8071
30.09◦
40◦
9.812
40.10◦
◦
50
9.818
50.10◦
60◦
9.824
60.09◦
70◦
9.828
70.06◦
80◦
9.831
80.03◦
90◦
9.832
90◦
Tabella 3.11.1: Variazione in modulo e direzione dell’accelerazione associata alla forza peso dovuta
alla forza centrifuga della rotazione terrestre, a varie latitudini.
Il risultato pratico finale è che un osservatore sulla superficie terrestre misurerà, a seconda della
latitudine, una forza peso lievemente diversa da quella che si avrebbe se il pianeta non ruotasse su
se stesso, ma questo non cambia niente di concettuale nelle esperienze descritte nella sezione 3.3.
3.11.2 Effetti della forza di Coriolis. Deviazione verso oriente dei gravi in caduta
In un sistema solidale con la Terra i corpi sono soggetti alla forza di Coriolis, che in alcuni
casi provoca effetti misurabili o addirittura evidenti. Un esempio dell’ultima specie è il ben noto
pendolo di Foucault: un pendolo ottenuto appendendo un peso a un cavo, normalmente di lunghezza
dell’ordine o superiore alla decina di metri, in modo che le oscillazioni si mantengano per diverse
ore,27 viene messo in moto e si verifica che il piano verticale in cui avviene l’oscillazione ruota
costantemente; al polo compie un giro completo in 24 ore, mentre la rotazione diventa più lenta
via via che l’esperimento è fatto a latitudini più vicine all’equatore, dove l’effetto non sussiste.
Tuttavia, lo studio dettagliato del fenomeno presenta complicazioni che non lo rendono adatto a
questo livello di conoscenza della meccanica. Altri fenomeni dovuti alla forza di Coriolis sono la
deviazione dei proiettili di cannone e la deviazione verso oriente dei gravi in caduta. Vogliamo
analizzare proprio quest’ultimo effetto e lo faremo in corrispondenza dell’equatore, dove l’effetto è
massimo.
Utilizzeremo lo stesso sistema di riferimento usato precedentemente in 3.11.1, e avremo un
corpo P (vedi fig. 3.11.2) che viene lasciato cadere da un’altezza h rispetto al suolo. Il corpo si
trova inizialmente sull’asse x del nostro sistema, con x(0) = r + h, dove r è il raggio terrestre,
e ẋ(0)=0. Inoltre, ovviamente, y(0) = z(0) = 0 e ẏ(0) = ż(0) = 0. Nel nostro studio faremo
alcune approssimazioni, che tuttavia non incideranno in modo significativo sul risultato. La prima
approssimazione è di considerare che sul corpo agisca una forza peso costante −m g i, dove g
rappresenta quella che sopra è stata indicata con g � , ossia l’accelerazione risultante dalla somma
delle forze di gravità e centrifuga. Trascureremo quindi sia il fatto che l’accelerazione di gravità
cambia in intensità con la distanza dal centro della Terra28 , sia il fatto che per effetto della forza
di Coriolis il moto non si svolgerà lungo l’asse X ma devierà in direzione delle Y positive, per cui
a rigore la forza peso, che all’equatore è diretta verso il centro della Terra, non sarà sempre diretta
27
28
Un pendolo di lunghezza minore e periodo più corto subirebbe un maggiore smorzamento da parte dell’aria.
Si veda il capitolo sulla gravitazione universale.
3.11.2
102
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
z
y
O
h
P
x
Fig. 3.11.2: Spostamento verso oriente di un grave che cade per un’altezza h alla latitudine dell’equatore. L’entità della caduta nel disegno è esagerata di svariati ordini di grandezza per renderla
visibile, come pure l’entità dello spostamento è esagerata in proporzione ad h.
secondo −i. Scriviamo l’espressione della forza di Coriolis che agisce su P
FCor = −2 m Ω k × (ẋ i + ẏ j + ż k) = 2 m Ω (ẏ i − ẋ j)
(3.11.5)
Vediamo quindi che sul corpo non agiscono forze in direzione Z e quindi, date le condizioni iniziali,
per tutto il moto avremo z = 0. Scriviamo invece esplicitamente le equazioni di moto per le altre
direzioni
�
�
m ẍ = −m g + 2 m Ω ẏ
ẍ = −g + 2 Ω ẏ
⇒
(3.11.6)
m ÿ = −2 m Ω ẋ
ÿ = −2 Ω ẋ
La seconda delle (3.11.6) può essere integrata facilmente
ẏ(t) = −2 Ω (x(t) − x(0))
(3.11.7)
Noi stiamo considerando un corpo che cade da un’altezza h, per cui x(t) − x(0) passa da 0 a −h
e corrispondentemente 0 ≤ ẏ(t) ≤ 2 Ω h. Il termine 2 Ω ẏ nella (3.11.6) per ẍ risulta quindi sempre
minore di 4 Ω2 h, ossia � 2.1 · 10−7 m · s−2 per una caduta di un dislivello h = 10 m e dieci volte
tanto per una caduta di 100 m. In entrambi i casi il termine risulta del tutto trascurabile rispetto
all’accelerazione della forza peso g � 9.8 m · s−2 . Possiamo quindi considerare il moto in direzione
X come determinato dalla sola forza peso e l’integrazione fornisce facilmente come risultati
ẋ(t) = −g t
⇒
x(t) = r + h −
1 2
gt
2
(3.11.8)
Introducendo l’espressione di ẋ nella seconda delle (3.11.6) si ottiene
ÿ = 2 Ω g t
⇒
ẏ(t) = Ω g t2
103
⇒
y(t) =
1
Ω g t3
3
(3.11.9)
3.11.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Abbiamo quindi uno spostamento progressivo del corpo nella direzione delle y positive, ossia verso
oriente. Dall’ultima delle (3.11.8) possiamo calcolare il tempo t necessario perché il corpo cada di
un dislivello h, ossia perché x vada da r + h a r. Risulta
t=
�
2h
g
⇒
�
√
2 2
h3
y(t) =
Ω
3
g
(3.11.10)
Se ne ricava che un corpo lasciato cadere all’equatore per una distanza di 10 m finirà in un punto
spostato verso oriente di � 0.7 mm rispetto alla direzione verticale che si potrebbe determinare
staticamente mediante un filo a piombo. Se consideriamo una caduta di 100 m lo spostamento sale
a � 2 cm.
3.11.2
104
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
4.
Dinamica dei sistemi
Nel capitolo precedente abbiamo stabilito i principi della meccanica per il punto materiale; di
fronte a un sistema di più punti materiali abbiamo asserito che in alcuni casi questo può essere
trattato come un unico punto, altrimenti si può studiare il moto applicando F = m a a ciascuno dei
punti materiali che lo costituiscono, dove F rappresenta per ogni punto la somma di tutte le forze ad
esso applicate. In questo capitolo vedremo che per qualsiasi sistema meccanico si possono ottenere
delle importanti informazioni generali sul suo comportamento dinamico senza dover risolvere le
equazioni di moto punto per punto, e introdurremo due nuove grandezze fisiche che contengono le
predette informazioni.
Prima di tutto vogliamo approfondire il concetto di sistema meccanico. Un tale sistema è
costituito, sappiamo, da un insieme finito o infinito di punti materiali: possiamo quindi definire un
sistema meccanico definendo di volta in volta il criterio per stabilire se un punto materiale ne fa
parte o no. Va sottolineato il fatto che la definizione del sistema meccanico è data arbitrariamente
da chi lo intende studiare. Nel definire il sistema non esistono criteri obbligatori a priori, ma
valgono considerazioni di opportunità pratica.
Il secondo punto generale che vogliamo affrontare è la distinzione, dato un sistema meccanico,
fra forze interne e forze esterne applicate ai punti materiali che ne fanno parte.
F1,A
P1
F
F3,13,B
F1,3
F1,2
FA,1
A
FA,2
F2,1
P2
F2,A
F2,3
F2,B
F3,2
P3
B
FB,2
FB,3
Fig. 4.1.1: Un sistema meccanico costituito dai punti materiali P1 , P2 , P3 . In rosso sono mostrate le forze
interne dovute all’interazione fra i punti del sistema, in verde le forze esterne dovute all’interazione con i punti A
e B non facenti parte del sistema.
Definiamo forze interne al sistema quelle forze la cui reazione nel senso del terzo principio è
applicata a un altro punto del sistema, ossia le forze che sono dovute alle interazioni fra punti
facenti parte del sistema. Definiamo invece forze esterne tutte le altre forze che non sono interne.
Se avessimo definito le forze esterne come quelle la cui reazione è applicata a un punto esterno al
sistema, ci saremmo trovati in difficoltà a classificare le forze d’inerzia, per le quali non è possibile
determinare un punto a cui sia applicata la reazione; con la nostra definizione invece le forze
d’inerzia, se presenti, sono sempre esterne al sistema.
105
4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
4.1 Quantità di moto e prima equazione cardinale della dinamica
Consideriamo un sistema costituito da n punti materiali {P1 , P2 . . . Pn }. A ciascun punto Pi
del sistema saranno applicate forze interne dovute all’interazione con altri punti: chiameremo Fi,j
la forza applicata sul punto i-mo dal punto j-mo.1 . Per ciascuna Fi,j esisterà la reazione Fj,i e per
il terzo principio Fj,i = −Fi,j . Inoltre sul punto Pi potranno agire delle forze esterne: chiameremo
Fi,e la somma di queste forze. Per il secondo principio della dinamica, la somma Fi di tutte le
forze agenti sul punto sarà uguale alla sua accelerazione moltiplicata per la massa
Fi =
�
Fi,j + Fi,e = mi ai
(4.1.1)
j�=i
Se scriviamo la relazione (4.1.1) per ciascun punto materiale del sistema e sommiamo le equazioni
membro a membro abbiamo
� �
�
�
Fi,j +
Fi,e =
mi ai
i
i
j�=i
(4.1.2)
i
La doppia sommatoria al primo membro è costituita da tutte le coppie di forze interne Fi,j e Fj,i
e quindi risulta complessivamente nulla. Si avrà quindi
Re =
�
mi ai
(4.1.3)
i
Dove Re è detta la risultante delle forze esterne ed è la somma vettoriale di tutte le forze esterne
applicate al sistema.
Riguardo al concetto di risultante va chiarito subito un aspetto importante. Le forze sono vettori
applicati, ossia entità fisiche caratterizzate da intensità, direzione, verso e punto di applicazione.
Esiste in generale una completa equivalenza fra l’effetto di più forze applicate allo stesso punto
materiale e quello di un’unica forza pari alla loro somma vettoriale; se invece sommiamo forze
applicate a punti diversi otteniamo un vettore libero, a cui non è associato un punto di applicazione.
Sarebbe quindi errato pensare la risultante delle forze esterne come applicata a priori a un qualche
punto, tuttavia vedremo che in alcuni casi il moto si svolge come se la risultante delle forze fosse
applicata in un determinato punto.
Tornando alla (4.1.3) possiamo scriverla in un modo più significativo se introduciamo per ogni
sistema meccanico una nuova grandezza fisica, che chiamiamo quantità di moto, che definiamo
come segue
�
P=
mi vi
(4.1.4)
i
La quantità di moto è data quindi dalla somma delle velocità di ciascun punto materiale del sistema
moltiplicate per la massa del medesimo. In termini di P la (4.1.3) diventa
Ṗ = Re
1
(4.1.5)
Non necessariamente ogni punto del nostro sistema dovrà interagire con tutti gli altri, per cui alcune di queste forze
potranno essere nulle.
4.1
106
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Quindi la derivata temporale della quantità di moto di ogni sistema meccanico uguaglia istante per
istante la risultante delle forze esterne. La (4.1.5) ci fornisce informazione sul moto di un qualsiasi
sistema di punti materiali, informazione che nella maggior parte dei casi non sarà sufficiente a
determinare il moto di ogni punto del sistema (basti pensare che la (4.1.5) è una singola equazione
vettoriale e quindi permette di determinare solo tre grandezze indipendenti, mentre un sistema
meccanico può avere molti più gradi di libertà) ma che è comunque utile. Essa prende il nome di
prima equazione cardinale della dinamica.
Un caso particolare della (4.1.5) si ha quando la risultante delle forze esterne è nulla. In tal caso
Re = 0
⇒
Ṗ = 0
⇒
P = cost.
(4.1.6)
La (4.1.6) è chiamata conservazione della quantità di moto, e stabilisce che se la risultante delle
forze esterne è nulla per un sistema meccanico, la quantità di moto non varia, ossia si conserva. Il
risultato vale anche separatamente per componenti: se Re è nulla in una direzione, la componente
di P in quella direzione si conserva. Infine, se un sistema meccanico non interagisce con l’esterno,
e costituisce quello che si chiama un sistema isolato, la sua quantità di moto rimane costante.
Questo è il primo principio di conservazione che incontriamo nello studio della meccanica e vale
la pena di notare un aspetto particolare di questo tipo di relazioni: mentre lo studio del moto di un
punto o di un sistema mediante le equazioni di moto derivanti direttamente da F = m a richiede
di seguire il moto istante per istante integrando le equazioni da un momento iniziale in poi, un
principio di conservazione ci consente di arrivare a risultati, ad esempio, validi ad un certo tempo
t > 0 a partire dalle condizioni iniziali a t = 0 ma senza dover conoscere i particolari di quello che
è successo ai tempi intermedi.
x1
y
N1
x2
N2
F1,2
F2,1
m2g
m1g
x
Fig. 4.1.2: Due corpi, di masse rispettivamente m1 e m2 , si trovano su una guida orizzontale senza
attrito e interagiscono tramite una molla. La quantità di moto orizzontale si conserva.
Consideriamo come esempio un sistema formato da due corpi, di masse rispettive m1 e m2 , che
si trovano su una guida orizzontale senza attrito e sono collegati da una molla. Prendiamo un
sistema di riferimento con l’asse X orizzontale e l’asse Y verticale. In direzione verticale agirà su
ciascuno di essi la forza peso −mi g j che sarà compensata dalla reazione del vincolo Ni = Ni j;
non avremo quindi moto in direzione verticale. In direzione orizzontale chiamiamo x1 l’ascissa di
un punto del primo corpo e x2 l’ascissa di un punto sul secondo. Le uniche forze orizzontali sono
quelle dovute alla molla, che sono forze interne al sistema. Pertanto la risultante delle forze esterne
ha componente nulla in direzione x e si conserva la componente corrispondente della quantità di
moto.2 Dato che i due corpi traslano, ciascun punto del primo corpo ha ugual velocità ẋ1 e ciascun
2
Risulta nulla anche la componente y, ma per questa abbiamo utilizzato una condizione più stringente, ossia
l’annullarsi della somma fra peso e reazione vincolare separatamente per ciascuno dei due corpi.
107
4.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
punto del secondo velocità ẋ2 . La componente x della quantità di moto si potrà scrivere quindi
Px = m1 ẋ1 + m2 ẋ2 . Avremo
m1 ẋ1 (t) + m2 ẋ2 (t) = m1 ẋ1 (0) + m2 ẋ2 (0)
(4.1.7)
Se supponiamo che all’istante iniziale i corpi fossero fermi, la (4.1.7) si può integrare ancora facilmente
m1 x1 (t) + m2 x2 (t) = m1 x1 (0) + m2 x2 (0)
(4.1.8)
La conservazione della quantità di moto ci fornisce una relazione dinamica fra le coordinate dei
due corpi. Essa non può fornirci le soluzioni separate x1 (t) e x2 (t) perché queste dipenderanno,
evidentemente, dalle caratteristiche della molla, mentre nel nostro studio essa non compare assolutamente, anzi, avrebbe potuto essere sostituita da qualsiasi altro tipo di interazione fra i due corpi
senza che le (4.1.7) e (4.1.8) cambiassero. La “potenza” dei principi di conservazione sta proprio
nella loro generalità.
4.2 Il centro di massa
La quantità di moto di un sistema può essere espressa anche in un modo che risulta più interessante, se consideriamo che per ogni sistema meccanico di punti materiali Pi possiamo definire
istante per istante un punto G, che chiamiamo centro di massa, dalla relazione
(G − O) =
�
i
in componenti:
�
mi xi
xG = i
M
mi (Pi − O)
�
=
i mi
yG =
�
i
�
i
mi yi
M
mi (Pi − O)
M
zG =
�
i
(4.2.1)
mi zi
M
dove con M abbiamo indicato la massa totale del sistema. La definizione (4.2.1) vale per un insieme
numerabile di punti materiali. Se abbiamo invece una distribuzione continua di massa, con densità
volumetrica data da ρ(x, y, z) = dm/dV la somma diventa un integrale
(G − O) =
�
V
(Pi − O) ρ dV
�
=
ρ dV
V
in componenti:
�
x ρ dV
xG = V
M
yG =
�
V
�
V
(Pi − O) ρ dV
M
y ρ dV
M
zG =
�
V
(4.2.2)
z ρ dV
M
dove V è il volume occupato dal sistema. Sul centro di massa possiamo fare alcune considerazioni
– La (4.2.1) definisce sempre un punto, e la definizione è indipendente dal sistema di riferimento:
cambiando questo cambieranno le componenti di (G − O), ma il punto individuato resterà
lo stesso.
se consideriamo
un riferimento con origine O� avremo (G − O� ) =
� Ad esempio,
�
�
(1/M ) i mi (Pi − O ) = (1/M ) i mi [(Pi − O) + (O − O� )] = (G − O) + (O − O� ), ossia la
relazione che sussiste in generale fra i vettori posizione relativi a uno stesso punto al cambiare
del riferimento.
4.2
108
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
– Il centro di massa non coincide in generale con uno dei punti del sistema, e può capitare dove
la densità locale di massa è nulla. Si pensi ad esempio a una palla costituita da una “buccia”
sferica, il cui centro di massa è il centro geometrico della sfera. Pertanto il centro di massa è
un punto geometrico e non un punto materiale. Tuttavia vedremo che il moto di un sistema
si svolge come se fosse un punto materiale di massa pari a M . Nel caso di un corpo rigido, il
centro di massa non varia la sua posizione rispetto a tutti gli altri punti del corpo, e si dice
quindi solidale col moto del corpo rigido.
Consideriamo la derivata temporale della (4.2.1), nel sistema di riferimento di origine O
d
1 �
d
1 �
(G − O) = vG =
mi (Pi − O) =
mi vi
dt
M i
dt
M i
⇒
P = M vG
(4.2.3)
Possiamo quindi esprimere la quantità di moto di un sistema come prodotto della sua massa per
la velocità del centro di massa. In termini di centro di massa, la (4.1.3) diventa
Re = M aG
(4.2.4)
La (4.2.4) significa che il centro di massa di ogni sistema meccanico si muove come un punto
materiale di massa pari a quella dell’intero sistema a cui sia applicata la risultante delle forze
esterne. La prima equazione cardinale espressa in questa forma è perfettamente analoga a F = m a
per un punto materiale e spiega rigorosamente perché nel capitolo precedente abbiamo potuto
trattare corpi estesi come se fossero punti materiali.
4.2.1 Esempi di calcolo di centri di massa
Vogliamo mostrare a titolo di esempio come si effettua il calcolo del centro di massa per alcuni
oggetti. Preventivamente enunciamo una proprietà fondamentale del centro di massa, che si sfrutta
spesso nei calcoli. Supponiamo di avere due sistemi di punti materiali, uno formato dai punti
{P1 , P2 . . . Pn } e l’altro dai punti {Pn+1 ,�
Pn+2 . . . Pn+m }. Il primo sistema avrà come centro
n
di massa G1 , dove (G1 − O) = (1/M1 ) i=1 mi (Pi − O), il secondo G2 , con (G2 − O) =
�n+m
(1/M2 ) i=n+1 mi (Pi − O). È facile vedere, effettuando il calcolo diretto, che se consideriamo un
terzo sistema contenente i punti del primo e del secondo, il suo centro di massa si può calcolare a
partire da G1 e G2 : (G − O) = (1/(M1 + M2 )) [M1 (G1 − O) + M2 (G2 − O)]. Questo significa che
il centro di massa di un sistema costituito da due sotto–sistemi si può calcolare come il centro di
massa di due punti materiali corrispondenti ai centri di massa dei sottosistemi e aventi ciascuno la
massa del sotto–sistema corrispondente. La proprietà si estende banalmente al caso di un sistema
costituito da più sotto–sistemi.
Come primo esempio di calcolo di centro di massa, vogliamo ottenere un risultato generale:
il centro di massa di due punti materiali si trova sulla retta che li congiunge, a distanze da essi
inversamente proporzionali alle rispettive masse. Per dimostrare quanto sopra ci riferiamo alla
fig. 4.2.1: i punti sono G1 e G2 , con masse rispettive M1 e M2 . Vediamo innanzitutto che il
vettore posizione di un qualunque punto P che si trovi sulla retta congiungente G1 e G2 può
essere posto nella forma
(P − O) = (G1 − O) + λ D u
(4.2.5)
dove u è un versore diretto come (G2 − G1 ) e D è la distanza fra i punti, D = |G2 − G1 |. Se λ = 0
P ≡ G1 , se λ = 1 P ≡ G2 , se 0 < λ < 1 P si trova all’interno del segmento G1 G2 . Il vettore
109
4.2.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
S1
G1
M1
S=S1+S2
S2
G
u
G2
M2
M
O
Fig. 4.2.1: La figura illustra due proprietà del centro di massa: a) il centro di massa di un sistema
costituito da due sotto–sistemi aventi masse rispettive M1 e M2 e centri di massa G1 , G2 si può calcolare
come quello di due punti materiali nelle posizioni dei centri di massa, in ciascuno dei quali è concentrata
la massa del rispettivo sottosistema. b) Il centro di massa di due punti materiali si trova sulla retta
congiungente i punti, a distanze fra essi inversamente proporzionali alle rispettive masse.
posizione del centro di massa si può scrivere in base alla definizione (4.2.1)
(G − O) =
1
[M1 (G1 − O) + M2 (G2 − O)]
M1 + M2
(4.2.6)
In base alla (4.2.5) possiamo scrivere
(G2 − O) = (G1 − O) + D u
(4.2.7)
Sostituendo nella (4.2.6) abbiamo
1
[M1 (G1 − O) + M2 (G1 − O) + M2 D u] =
M1 + M2
M2
=(G1 − O) +
Du
M1 + M2
(G − O) =
(4.2.8)
Confrontando il risultato con la (4.2.5) risulta che G si trova sulla congiungente G1 e G2 a una
distanza da G1 pari a D M2 /(M1 + M2 ) e quindi a distanza D M1 /(M1 + M2 ) da G2 . Il rapporto
fra le distanze è il reciproco del rapporto fra le masse, per cui è provata la proporzionalità inversa.
Calcoliamo adesso la posizione del centro di massa di una sbarretta rettilinea omogenea di
lunghezza l e spessore trascurabile: la definizione (4.2.1) costituisce in pratica la media pesata
delle coordinate dei punti del sistema dove le masse rispettive fungono da pesi. Se scomponiamo
la sbarretta in elementi di lunghezza infinitesima dx, a ciascun elemento corrisponderà la stessa
massa infinitesima. La media pesata ha pesi tutti uguali e si riduce a una media aritmetica, per
cui il centro di massa risulta nel centro geometrico della sbarretta, a distanza l/2 dagli estremi.
4.2.1
110
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
B
α
G
A
H
dx
C
M
x
Fig. 4.2.2: Calcolo del centro di massa per un triangolo omogeneo.
Passiamo a calcolare il centro di massa di una superficie piana a forma di triangolo ABC,
omogenea. Suddividiamo il triangolo in tante strisce di spessore infinitesimo, parallele al lato AC,
come si vede in fig. 4.2.2.3 Ciascuna striscia corrisponde a una sbarretta omogenea ed avrà quindi
il centro di massa in corrispondenza del centro geometrico. I centri di massa si troveranno quindi
sulla mediana BM relativa al lato AC. Resta da individuare il punto sulla mediana, per esempio
attraverso la sua distanza da B. Stabiliamo un asse x lungo la mediana, con origine in B e sia dx
il tratto di mediana tagliato da ogni striscia. Ad ogni striscia compete una massa infinitesima dm
e, sfruttando la proprietà vista prima, determiniamo il centro di massa come quello di tanti punti
materiali che giacciono sulla mediana, ciascuno a una distanza x da B, aventi la massa della striscia
corrispondente. Se σ è la densità superficiale di massa, costante, del triangolo, ossia la massa per
unità di superficie, la massa di ciascuna striscia è data da σ w dx cos α, dove w è la lunghezza della
striscia, α è l’angolo formato dalla mediana con l’altezza BH relativa al lato AC, per cui dx cos α
è l’altezza della striscia. Per quanto riguarda w, si vede che ogni striscia ha al di sopra un triangolo
simile al triangolo ABC, che ha per base w e la mediana lunga x. Se l è la lunghezza dell’intera
mediana BM e b la lunghezza del lato AC, per la similitudine vale w/x = b/l. La massa di ogni
striscia è quindi dm = σ x dx cos α b/l. Calcoliamo l’ascissa di G usando la (4.2.1) e sostituendo
la somma con un integrale
xG
1
=
M
�
1
x dm =
M
strisce
�
l
x=0
σ cos α b 2
σ cos α b l2
x dx =
l
3M
(4.2.9)
Teniamo conto del fatto che σ, data l’omogeneità, è anche il rapporto fra la massa del triangolo e la
sua superficie, che vale AC · BH/2, ossia b l cos α/2, per cui σ = 2 M/(b l cos α). Sostituendo nella
(4.2.9) avremo infine xG = (2/3) l. Dalla geometria sappiamo che le tre mediane di un triangolo si
incrociano in un solo punto a due terzi della loro lunghezza, risultato perfettamente coerente con
quanto adesso determinato, visto che avremmo potuto svolgere il calcolo usando anche le altre due
mediane e avremmo trovato risultati analoghi.
Vogliamo adesso calcolare la posizione del centro di massa di un settore circolare omogeneo di
raggio R e ampiezza α. Per simmetria il centro di massa dovrà trovarsi sulla retta che biseca il
settore. Prendiamo dunque un sistema di riferimento con l’origine nel centro del settore e l’asse X
diretto lungo la linea che lo biseca. Per trovare la posizione lungo l’asse X partiamo dal calcolare
la posizione del centro di massa non di tutto il settore, ma di un arco di spessore infinitesimo,
come ad esempio l’arco di circonferenza marcato in rosso in fig. 4.2.3. Indichiamo con λ la densità
3
Sul modo di calcolare questi integrali si veda il punto 2 dell’appendice.
111
4.2.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
y
B dϕ
R
α/2
α/2
O
ϕ
x
A
Fig. 4.2.3: Calcolo del centro di massa per un settore circolare omogeneo.
lineare di massa dell’arco, ossia la massa per unità di lunghezza che vale M/(α R) e suddividiamo
l’arco in tanti tratti infinitesimi di ampiezza angolare dϕ, dove ϕ è l’angolo formato da ciascun
tratto con l’asse X. La massa infinitesima di ogni tratto è dm = λ R dϕ e la sua coordinata x vale
R cos ϕ. L’ascissa del centro di massa dell’arco si calcola quindi come
xG =
1
M
�
α/2
λ R2 cos ϕ dϕ =
−α/2
2 sin α2
2 λ R2
α
sin = R
M
2
α
(4.2.10)
La (4.2.10) fornisce la posizione del centro di massa di un arco di circonferenza in funzione del
raggio e dell’angolo. Possiamo fare delle verifiche di plausibilità, sempre utili: prima di tutto
vediamo che xG ≥ 0 per ogni valore di α, coerentemente col fatto che la maggior parte della massa
si trova ad avere sempre x > 0. Se α = 2π xG = 0, ovvio dato che si tratta dell’intero cerchio.
Se α → 0 sin(α/2) → α/2 e xG → R. Anche questo risultato è corretto, dato che in questo caso
l’arco si riduce ad un punto materiale posto a distanza R dall’origine.
Sfruttiamo il risultato per trovare il centro di massa del settore: possiamo scomporre il settore
in tanti archi concentrici di raggio x variabile e spessore infinitesimo dx. Chiamiamo σ la densità
superficiale del settore, con σ = 2 M/(R2 α). Possiamo quindi calcolare il centro di massa del
settore considerando gli archi aventi massa infinitesima dm = σ x α dx e il rispettivo centro di
massa con ascissa 2 x sin(α/2)/α. Avremo
xg =
1
M
�
0
R
2 σ sin
α 2
2 σ R3
α
4 sin α2
x dx =
sin = R
2
3 M
2
3
α
(4.2.11)
Si poteva arrivare al risultato (4.2.11) dalla (4.2.10) in modo più semplice ed elegante. Possiamo
considerare il settore circolare come costituito di tanti settori infinitesimi di ampiezza angolare dϕ,
come le stecche che costituiscono un ventaglio. Ciascun settore infinitesimo è approssimabile con
un triangolo isoscele, di cui sappiamo che il centro di massa si trova a 2/3 della lunghezza della
mediana. Ragionando cosı̀ il nostro settore, dal punto di vista del centro di massa, è equivalente
a una distribuzione unidimensionale omogenea di massa lungo un arco di circonferenza di raggio
2 R/3. L’ascissa del centro di massa si determina usando la formula (4.2.10) con un raggio pari a
2 R/3 e si ritrova il risultato della (4.2.11). È da notare che mandando a zero l’ampiezza angolare
della “stecca di ventaglio” questa finisce per somigliare a una sbarretta sottile, che avrebbe il centro
di massa a metà lunghezza; tuttavia se ragionassimo in questo modo commetteremmo un errore,
4.2.1
112
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
dato che non si può dimenticare di aver a che fare sempre con una stecca di ventaglio, per quanto
stretta, la quale ha una larghezza crescente dal centro alla periferia, e quindi un centro di massa
più spostato verso quest’ultima.
y
A
dx
A
R
V
C
V
β
B
C
x
B
Fig. 4.2.4: Calcolo del centro di massa per un cono.
Come ultimo esempio, vogliamo calcolare la posizione del centro di massa per un cono omogeneo
avente altezza h e raggio di base R. Se V è il vertice del cono e C il centro del cerchio di base,
come in fig. 4.2.4, indichiamo con β l’angolo di semi–apertura del cono, con tan β = R/h. Possiamo
suddividere il cono con piani perpendicolari a VC, a distanza infinitesima l’uno dall’altro. Ciascuna
fetta è simmetrica rispetto all’asse VC e quindi il suo centro di massa si troverà sul medesimo.
Resta da determinare la distanza del centro di massa del cono da V. Per fare questo prendiamo
un sistema di riferimento con origine in V e l’asse X diretto verso C. Se consideriamo una fetta
del cono posta a distanza x dall’origine e di spessore dx, possiamo approssimarla a un cilindro4
di raggio x tan β e altezza dx, e scrivere il suo volume infinitesimo come dV = π x2 tan2 β dx. Il
volume del cono risulta allora
V =
�
h
π x2 tan2 β dx =
0
1
1
π h3 tan2 β = π h R2
3
3
(4.2.12)
La densità ρ del cono risulta quindi ρ = M/V = 3 M/(π R2 h). Possiamo adesso calcolare la
posizione x del centro di massa sommando il contributo di ogni fetta, avente massa dm = ρ dV .
xG =
1
M
�
h
ρ π x3 tan2 β dx =
0
3πρ 2 2 3
h R = h
4M
4
(4.2.13)
Il centro di massa del cono si trova quindi sull’asse a una distanza dal vertice pari a tre quarti
dell’altezza; la sua posizione non dipende dall’apertura angolare, ossia, data h, dal raggio di base
R.
4
Rigorosamente, la fetta ha la forma di un tronco di cono, ma il contributo al volume dovuto all’inclinazione della
superficie laterale è, come si può dimostrare, trascurabile.
113
4.2.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
4.3 Il concetto di momento di forza
Per proseguire nel nostro studio della dinamica dei sistemi introduciamo un nuovo concetto: data
una forza F applicata in un punto P e un ulteriore punto C detto centro di riduzione, chiamiamo
momento della forza F rispetto a C
τ = (P − C) × F
(4.3.1)
Il momento di una forza risulta quindi dal prodotto vettoriale del vettore spostamento che collega
il centro di riduzione al punto d’applicazione con la forza stessa. Da un punto di vista geometrico,
(vedi fig. 4.3.1) se chiamiamo retta d’azione della forza la retta passante per P parallela a F,
individuiamo il piano5 passante per essa e il centro di riduzione C, il momento della forza è diretto
perpendicolarmente al piano e vale in modulo |ττ | = |F| b, dove b è il cosiddetto braccio della forza,
ossia la distanza fra C e la retta d’azione. Il verso del momento è tale che un osservatore in piedi
sul piano in C, con la testa nel verso del momento, guardando P vede la forza diretta sempre verso
la sua sinistra.
τ
H
F
P
b
C
Fig. 4.3.1: Rappresentazione geometrica del calcolo del momento di una forza.
Il momento di forza ha le seguenti proprietà
– Il momento risulta nullo se C si trova sulla retta d’azione della forza ((P − C) risulta parallelo
alla forza).
– Il momento di una forza non cambia se il punto di applicazione viene spostato nella direzione
della forza stessa. Scriviamo F = F u, dove u è un versore. Dato il punto di applicazione P e il
centro di riduzione C, qualsiasi altro punto P� che si trovi sulla retta passante per P parallela a
F avrà come vettore spostamento rispetto a C (vedi anche la (4.2.4)) (P� − C) = (P − C) + α u,
dove α è il parametro che individua il punto sulla retta. Avremo quindi (P� − C) × F u =
(P − C) × F u + α u × F u. L’ultimo prodotto vettoriale è nullo perché i vettori sono paralleli.
– Dato un sistema di punti Pi a cui sono applicate forze Fi si definisce momento risultante delle
forze
τR =
�
(Pi − C) × Fi
(4.3.2)
i
5
Se C si trova sulla retta d’azione i piani sono infiniti, ma in tale caso il momento è nullo e non si pongono ulteriori
problemi.
4.3
114
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Se calcoliamo il momento risultante rispetto a un nuovo centro di riduzione C� avremo
�
�
�
�
(Pi −C� )×Fi =
[ (Pi − C) + (C − C� )]×Fi =
(Pi −C)×Fi +(C−C� )×
Fi (4.3.3)
i
i
i
i
Quindi al cambiare del centro di riduzione il momento risultante cambia di una quantità pari
al prodotto vettoriale del vettore spostamento dal nuovo al vecchio centro di riduzione per la
risultante delle forze considerate. Questo significa che se un sistema di forze ha risultante nulla il
suo momento risultante non cambia al cambiare del centro di riduzione.6 Il caso particolare più
semplice di un sistema di forze a risultante nulla è quello di due forze opposte F1 = −F2 = F
applicate rispettivamente a due punti materiali P1 e P2 . Questo sistema di forze si chiama
coppia. Dato che il momento risultante della coppia non dipende dal centro di riduzione, si
può calcolare usando come tale uno dei due punti a cui le forze sono applicate, ad esempio
P2 , cosı̀ che basta calcolare il momento di F1 . In tal modo risulta immediatamente evidente
che |ττ | = |F| b, dove b, che qui si chiama braccio della coppia, è la distanza fra le due rette di
applicazione.
τ
F
P1
b
P2
-F
Fig. 4.3.2: Momento risultante di una coppia di forze.
Il momento di una forza ha le dimensioni di una forza moltiplicata per uno spostamento
[ττ ] = L2 · M · T−2
(4.3.4)
Il momento di forza non ha un’unità di misura specifica, e si misura in N · m (newton per metro).7
4.4 Momento angolare e seconda equazione cardinale della dinamica
Vogliamo ripetere per i momenti di forza quanto fatto per le forze in 4.1. Dato un sistema di
6
7
Si faccia molta attenzione a non confondere il concetto di momento risultante con momento della risultante. La
risultante di un sistema di forze, come già detto, è un vettore libero, privo di punto di applicazione e quindi non se
ne può calcolare il momento.
Nel prossimo capitolo vedremo che altre importantissime grandezze fisiche, il lavoro e l’energia, hanno le stesse
dimensioni del momento di forza. Per queste grandezze esiste un’unità specifica, il joule. Tuttavia, anche se con
le stesse dimensioni, lavoro ed energia hanno un significato fisico diverso da quello del momento di forza, per cui
quest’ultimo non viene misurato in joule.
115
4.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
punti materiali con forze applicate come in quel caso, e preso un punto C come centro di riduzione
per i momenti, vogliamo studiare la somma dei momenti delle forze applicate ai punti del sistema.
Se Fi è la somma delle forze applicate al punto i–mo, come nella (4.1.1), avremo
�
�
(Pi − C) × Fi =
(Pi − C) × mi ai
i
(4.4.1)
i
Calcoliamo il momento risultante esplicitando le varie forze che agiscono su ogni punto
�
�
�
�
(Pi − C) × Fi =
(Pi − C) ×
Fi,j + Fi,e =
(Pi − C) × Fi,e = τ e
i
i
(4.4.2)
i
j�=i
Il risultato anche qui deriva dal fatto che per ogni forza interna Fi,j esiste la reazione Fj,i , opposta
e sulla stessa retta d’azione, cosı̀ che il momento complessivo delle due risulta nullo rispetto a
qualsiasi centro di riduzione. La (4.4.2) significa che se calcoliamo il momento risultante di tutte
le forze che agiscono su un sistema, esso corrisponde a quello delle sole forze esterne.
Introduciamo adesso per ogni sistema meccanico, dato un centro di riduzione C, una nuova
grandezza fisica che chiamiamo momento della quantità di moto o momento angolare definito come
segue
L=
�
i
(Pi − C) × mi vi
(4.4.3)
Calcoliamo la derivata temporale di L
L̇ =
�
i
(Pi − C) × mi ai +
�
i
(vi − vC ) × mi vi =
�
i
(Pi − C) × mi ai − vC × P
(4.4.4)
Se confrontiamo la (4.4.4) con la (4.4.1) e la (4.4.2) avremo
L̇ + vC × P = τ e
⇒
L̇ = τ e
se
vC (t) = 0 ∀t
oppure
(4.4.5)
C≡G
La (4.4.5) stabilisce una relazione fra la derivata temporale del momento della quantità di moto
e il momento risultante delle forze esterne al sistema, che prende il nome di seconda equazione
cardinale della dinamica. Nella pratica la (4.4.5) viene usata quasi sempre nella forma semplificata
valida quando il centro di riduzione C è fisso o coincide con il centro di massa.
Nei casi in cui il momento risultante delle forze esterne rispetto a un punto fisso o al centro di
massa del sistema è nullo, la (4.4.5) porta alla conservazione del momento della quantità di moto.
Esso si conserva, ovviamente, in un sistema isolato.
Allo stadio attuale delle nostre conoscenze sul soggetto non è possibile eseguire studi rigorosi
sull’argomento, ma vogliamo comunque illustrare il fenomeno almeno con un esempio.
4.4
116
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
z
y
P
ϕ
O
x
Fig. 4.4.1: Esempio di conservazione del momento della quantità di moto. In figura non sono disegnati i vincoli
che impediscono al supporto ogni movimento tranne la rotazione intorno al suo asse.
Consideriamo un supporto cilindrico rigido con l’asse verticale, libero di muoversi intorno all’asse
stesso, e una sbarretta rigida saldata al supporto perpendicolarmente all’asse di questo, in modo
tale che mentre il supporto gira la sbarretta si muove in un piano orizzontale. Una sferetta forata
P di massa m è infilata nella sbarretta e può scorrere lungo di essa. Consideriamo la massa del
cilindro e della sbarretta trascurabili rispetto a m e le dimensioni della sferetta trascurabili rispetto
alla sua distanza dall’asse del cilindro. Studiamo il moto del sistema in un riferimento fisso avente
l’origine sull’asse del cilindro, che coincide con l’asse Z, e gli assi X e Y nel piano in cui si muove
la sbarretta. Il sistema supporto–sbarretta, potendo solo ruotare intorno all’asse Z, ha un solo
grado di libertà, che possiamo parametrizzare mediante l’angolo polare ϕ formato dalla sbarretta
con l’asse X. La sferetta segue il moto della sbarretta, ma può anche scorrere lungo di essa, per
cui ha un ulteriore grado di libertà, esprimibile mediante la sua distanza r dall’asse Z.
Inizialmente supponiamo che la sferetta sia tenuta ferma sulla sbarretta ad una distanza r0
dall’asse di rotazione (ad esempio, con una funicella che le impedisce di allontanarsi) e che la
velocità di rotazione sia ϕ̇ = ω0 . Utilizziamo come centro di riduzione per i momenti di forza e il
calcolo di L l’origine O degli assi, fissa.
Per costringere il supporto a ruotare soltanto intorno all’asse Z vi dovranno essere dei vincoli,
costituiti da dei cuscinetti. Supponiamo di aver ridotto a zero l’attrito dei vincoli, in modo che
questi non influiscano sul moto permesso di rotazione. Non possiamo dimostrarlo rigorosamente
adesso, per cui ci limitiamo ad accettare l’affermazione che i vincoli ideali devono dare un momento
risultante nullo nella direzione dell’asse di rotazione Z. Se consideriamo il sistema supporto +
sbarretta + sferetta, le forze esterne sono le reazioni vincolari di cui sopra e le forze peso, che però,
essendo dirette lungo Z, daranno anch’esse momento nullo lungo l’asse di rotazione. Fra la sferetta
e la sbarretta si eserciterà una reazione vincolare mutua, che tuttavia rientra fra le forze interne
al sistema e non compare in τ e . Avremo quindi τ ez = 0 e conseguentemente si conserverà Lz .
Avendo supposto che l’unica massa non trascurabile sia quella della sferetta, possiamo calcolare
facilmente il momento angolare:
L = (P − O) × m vP = r ur × m (ṙ ur + r ϕ̇ uϕ ) = m r2 ϕ̇ k
(4.4.6)
dove abbiamo utilizzato le formule del moto in coordinate polari trattato in 2.8.3. Il momento
117
4.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
angolare risulta quindi diretto lungo l’asse di rotazione: se inizialmente manteniamo r(t) = r0 =
cost. la conservazione di Lz implica che ϕ̇(t) = ω0 = cost.. Nel momento in cui eliminiamo la forza
che tiene la sferetta ferma rispetto alla sbarretta, questa tenderà a allontanarsi dall’asse di rotazione
(se per un attimo ci mettiamo in un sistema di riferimento che ruota con la sbarretta, possiamo
dire che inizialmente la forza centrifuga agente sulla sferetta era compensata dal vincolo, e che se
eliminiamo questo essa causerà un’accelerazione r̈ > 0). Non vogliamo qui studiare in dettaglio
il moto della sferetta, che dipenderà anche dalla presenza di attrito o meno con la sbarretta, ma
visto che Lz seguita a conservarsi, potremo scrivere che
m r2 ϕ̇ = m r02 ω0
⇒
ϕ̇ =
r02
ω0
r2
(4.4.7)
La (4.4.7) costituisce una relazione dinamica fra r e ϕ̇ e ci dice che, ad esempio, via via che la
sferetta si allontana dall’asse la velocità di rotazione diminuisce. Questo tipo di effetto è ben noto,
ad esempio, ai pattinatori, che iniziano a girare su se stessi a braccia allargate per poi stringere le
braccia al petto e aumentare la loro velocità angolare.
Nella maggior parte dei casi il concetto di momento della quantità di moto trova applicazione nel
caso di movimenti di rotazione, ma sarebbe sbagliato pensare che esso derivi solo dalle rotazioni.
Consideriamo ad esempio una persona che, come in fig. 4.4.2, osservi dal bordo della strada un’auto
di massa m che si avvicini con velocità v. Se disponiamo un sistema di riferimento con l’origine
nella posizione dell’osservatore e l’asse X parallelo alla strada, e supponiamo che l’auto si muova
lungo una traiettoria parallela all’asse X e distante h da esso. Il momento angolare dell’auto con
centro di riduzione O vale
L = ( x(t) i + h j ) × m (−v i) = m v h k
(4.4.8)
L’auto quindi, pur traslando lungo una traiettoria rettilinea, ha un momento angolare diverso da
zero rispetto all’osservatore. Se l’auto si avvicinasse con momento nullo, beh, l’osservatore farebbe
bene a scansarsi, e alla svelta . . .
y
v
h
x
O
Fig. 4.4.2: Nel disegno visto dall’alto una persona posta in O osserva l’auto di massa m che si
muove lungo la strada con velocità v. Rispetto all’osservatore l’auto ha momento della quantità di moto
L = m v h k.
4.4
118
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
4.5 Momento angolare di un corpo rigido
Consideriamo un corpo rigido e calcoliamo il suo momento angolare dalla definizione (4.4.3),
rispetto a un punto C appartenente al corpo o solidale col suo moto.8 Possiamo considerare quindi
che le velocità di ciascun punto del corpo sono legate dalla (2.11.1)
L=
�
i
=
(Pi − C) × mi [vC + ω × (Pi − C)] =
�
�
i
�
mi (Pi − C) × vC +
=M (G − C) × vC −
�
i
�
i
mi (Pi − C) × [ ω × (Pi − C) ] =
(4.5.1)
mi (Pi − C) × [ (Pi − C) × ω ]
Se C è fermo oppure se C ≡ G il primo termine del risultato della (4.5.1) si annulla. Da adesso
in poi, salvo indicazione contraria, considereremo sempre uno di questi casi. Il secondo termine è
scritto in modo da poterlo trattare come un operatore che opera sulla velocità ω del corpo rigido e
che dipende dalla distribuzione di massa del corpo intorno a C. Tale operatore prende in generale
il nome di tensore d’inerzia e lega il momento della quantità di moto del corpo rigido alla sua
velocità angolare. Una trattazione generale del momento angolare di un corpo rigido è piuttosto
complessa e al di là del livello del presente corso. Ci limiteremo invece ad un caso particolare, che
ha comunque un vasto ambito di applicazione, ossia quello di un corpo rigido che si muove con
velocità angolare costante in direzione, ossia con ω = ω uω , dove uω = cost. Ci limiteremo inoltre
a calcolare la componente di L in direzione di ω , ossia L · uω .
L · uω = −
=
�
�
i
i
mi {(Pi − C) × [ (Pi − C) × ω ]} · uω =
mi [ (Pi − C) × uω ] · [ (Pi − C) × uω ] ω =
�
i
2
mi | (Pi − C) × uω | ω = I ω
(4.5.2)
Nel primo passaggio si sono sfruttate le proprietà del prodotto misto enunciate in 2.4.9. La componente nella direzione di ω del momento angolare è quindi proporzionale ad ω e il fattore di
proporzionalità I è detto momento d’inerzia. Considerando poi la definizione di prodotto vettoriale, si vede subito che | (Pi − C) × uω | = |Pi − C| |uω | sin θi = di dove di è la distanza del punto
Pi dall’asse passante per C e parallelo a ω .
Possiamo quindi scrivere
I=
�
mi d2i
nel caso continuo I =
�
d2 ρ dV
(4.5.3)
V
i
dove la seconda espressione vale per una distribuzione continua di massa con densità ρ(x, y, z).
Quindi, anche se nella definizione compare uno specifico punto C, il momento d’inerzia risulterebbe
lo stesso se calcolato rispetto a un qualsiasi altro punto sulla retta passante per C parallela a ω .
Parliamo quindi di momento d’inerzia del corpo rigido rispetto a un asse.
Consideriamo adesso due casi di corpo rigido che si muove con ω costante in direzione (vedi
fig. 4.5.2). Nel caso a) abbiamo un corpo rigido vincolato a ruotare intorno ad un asse fisso,
8
Se consideriamo, ad esempio, un corpo a forma di ciambella, un punto sull’asse di simmetria è solidale col moto del
corpo anche se non è un punto materiale di esso. Lo stesso centro di massa di una ciambella rigida si trova sull’asse
di simmetria, dove la densità di massa è nulla.
119
4.5
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Hi
di
Pi
uω θi
C
Fig. 4.5.1: Il modulo del prodotto vettoriale | (Pi − C) × uω | corrisponde alla distanza di = Pi Hi
del punto Pi dall’asse passante per C e parallelo a uω .
a)
ω
b)
ω
G
C
vG
Fig. 4.5.2: Esempi di moto di corpo rigido in cui ω mantiene direzione costante. In a) il corpo ruota
intorno ad un asse fisso, in b) il disco si muove sul piano e contemporaneamente gira su se stesso, per cui
ω è perpendicolare al piano.
mentre nel caso b) abbiamo un disco rigido che si muove su un piano e contemporaneamente ruota
su se stesso, sempre nel piano, per cui la velocità angolare è diretta perpendicolarmente al piano.
Se nel caso a) consideriamo come centro di riduzione un punto C fisso (il che implica si trovi
sull’asse di rotazione), nel caso b) il centro di massa G del disco e scriviamo il momento d’inerzia I
rispetto all’asse parallelo a ω passante per il centro di riduzione, come dato dalla (4.5.3), vediamo
che le distanze di dei vari punti dei corpi dall’asse considerato per il calcolo rimangono costanti nel
tempo e quindi il momento d’inerzia I degli oggetti rispetto agli assi usati è pure invariabile. In
generale il momento d’inerzia di un corpo che si muove con velocità angolare costante in direzione,
rispetto a un asse parallelo ad ω passante per un punto del corpo (o solidale col moto del medesimo)
rimane costante al muoversi del corpo.
4.6 La II equazione cardinale per un corpo rigido con ω costante in direzione
Nella sezione precedente abbiamo visto che per un corpo rigido la componente del momento
angolare nella direzione della velocità angolare vale L · uω = I ω Se deriviamo questa equazione
4.6
120
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
membro a membro rispetto al tempo otteniamo
d
[ L · uω ] = L̇ · uω + L · u̇ω
dt
d
[ I ω ] = I˙ ω + I ω̇
dt
(4.6.1)
Se ω rimane costante in direzione, ossia u̇ω = 0, anche I˙ = 0 e ne consegue
L̇ · uω = I ω̇
(4.6.2)
La (4.6.2) esprime la componente lungo ω della derivata temporale del momento angolare. Se
proiettiamo la seconda equazione cardinale (4.4.5) in questa direzione otteniamo
I ω̇ = τ e · uω
(4.6.3)
Questa equazione rappresenta la seconda cardinale per un corpo rigido che si muove con ω in
direzione costante. Il momento d’inerzia per la derivata temporale dell’intensità di ω uguaglia la
componente in direzione di ω del momento risultante delle forze esterne. Essa sarà essenziale per
risolvere molti dei problemi di moto che saranno presi in considerazione durante il corso.
In generale, si può dimostrare che, anche nel caso più generale di ω variabile in direzione, le due
equazioni cardinali sono sufficienti per determinare il moto di un corpo rigido. Non diamo qui la
dimostrazione, ma possiamo notare che un corpo rigido ha 6 gradi di libertà e che le due equazioni
cardinali, essendo vettoriali, producono un sistema di 6 equazioni scalari. Questo fatto tuttavia ci
dice che le cardinali possono essere sufficienti, ma non ci garantisce che lo siano davvero. Infatti
anche per sistemi con un numero inferiore di gradi di libertà, ma non rigidi, il moto non può non
essere determinabile usando soltanto le equazioni cardinali. Ad esempio di questo consideriamo il
sistema di due corpi su una guida orizzontale studiato nella sezione 4.1. Abbiamo già visto lı̀ che
la prima equazione cardinale fornisce una relazione fra le velocità dei corpi, la (4.1.7), che però non
è sufficiente a determinare separatamente il moto di ciascuno. Se anche applichiamo la seconda
cardinale, la situazione non cambia: consideriamo come centro di riduzione un punto fisso che si
trovi alle coordinate (0, −h); è facile vedere che il momento risultante delle forze esterne, le forze
peso e le reazioni vincolari, è nullo, per cui si conserva il momento angolare. Esso è dato da
L = (x1 i + h j) × m1 ẋ1 i + (x2 i + h j) × m2 ẋ2 i = −h (m1 ẋ1 + m2 ẋ2 ) k
(4.6.4)
La costanza del momento angolare si riduce alla costanza di m1 ẋ1 + m2 ẋ2 , ossia esattamente la
(4.1.7); essa quindi non dà alcuna nuova informazione. In termini intuitivi e non rigorosi, possiamo
pensare che nell’esempio di 4.1 le forze interne fra i due corpi sono fondamentali nel determinare
il moto, mentre in un corpo rigido le forze interne si limitano a mantenere fisse le distanze fra i
punti materiali che lo compongono.
4.7 Proprietà del momento d’inerzia
Il momento d’inerzia gode di un certo numero di proprietà, che risultano utili per calcolarlo:
121
4.7
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
a)
b)
O'
O
O'
Fig. 4.7.1: Nel calcolo di un momento d’inerzia di un corpo si possono “spostare” le masse parallelamente all’asse rispetto a cui questo è calcolato, senza che il risultato cambi In a) il momento d’inerzia
rispetto all’asse di simmetria del cilindro omogeneo è equivalente a quello del cerchio di base, in cui la
massa del cilindro fosse distribuita uniformemente. In b) invece si vuole calcolare il momento d’inerzia
di un cono rispetto al suo asse: se si spostassero gli elementi di massa parallelamente ad esso sulla base,
avremmo sı̀ una distribuzione di massa in un cerchio, ma la densità superficiale degraderebbe dal centro
alla periferia.
– Dato un corpo, se spostiamo i punti materiali che lo compongono lungo rette parallele all’asse
rispetto a cui vogliamo calcolare il momento d’inerzia, non variamo le loro distanze dall’asse
stesso e quindi non alteriamo I; in pratica, si può “schiacciare” tutta la massa in un unico piano
perpendicolare all’asse. Ad esempio, il momento d’inerzia di un cilindro omogeneo rispetto al
suo asse è uguale a quello di una distribuzione laminare, ossia bidimensionale, a forma di cerchio
omogeneo avente la stessa massa, e analogamente il momento d’inerzia di un parallelepipedo
omogeneo rispetto a un asse parallelo a uno spigolo equivale a quello di un rettangolo omogeneo.
Questo tipo di ragionamento è spesso utile per il calcolo dei momenti d’inerzia, ma occorre fare
attenzione a come risulta la distribuzione di densità a seguito dello “schiacciamento” (vedi
fig. 4.7.1).
– Consideriamo una distribuzione piana di massa, che prendiamo nel piano XY di un sistema
di riferimento solidale con la distribuzione, avente origine O (vedi
Se scriviamo il
� fig. 4.7.2).
2
momento d’inerzia del corpo rispetto
all’asse
X
abbiamo
I
=
m
y
,
mentre
il momento
x
i
i
i
�
2
rispetto
all’asse
Y
risulta
I
=
m
x
.
Il
momento
rispetto
all’asse
Z
vale
invece
Iz =
y
i
i
i
�
2
2
m
(x
+
y
).
Abbiamo
quindi
I
=
I
+
I
.
Ossia,
il
momento
d’inerzia
rispetto
all’asse
i
z
x
y
i
i
i
perpendicolare al piano di giacenza del corpo è uguale alla somma dei momenti d’inerzia rispetto
ai due assi nel piano. Come corollario abbiamo che se prendiamo altri due assi nel piano, ruotati
rispetto ai primi due, la somma dei momenti d’inerzia a essi relativi non cambierà, dovendo
restare uguale a Iz .
– Una proprietà importante del momento d’inerzia va sotto il nome di teorema di Huygens–Steiner
e si enuncia come segue: il momento d’inerzia di un sistema rispetto ad un asse α è uguale al
momento d’inerzia rispetto ad un asse αG parallelo al primo e passante per il centro di massa del
sistema, aumentato della quantità M D2 , dove M è la massa totale del sistema e D la distanza
fra gli assi α e αG .
Iα = IαG + M D2
(4.7.1)
Il teorema di Huygens–Steiner permette di calcolare facilmente il momento d’inerzia rispetto
a un asse qualsiasi, purché si conosca il momento d’inerzia rispetto all’asse ad esso parallelo e
passante per il centro di massa. Dato poi che la quantità M D2 è sempre positiva (o nulla se
α ≡ αG ) possiamo dire che, dato un sistema meccanico, fra tutti i momenti d’inerzia rispetto
ad assi paralleli, quello rispetto all’asse passante per il centro di massa ha il valore minimo.
4.7
122
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
z
y
Pi
yi
xi
x
O
Fig. 4.7.2: Si calcolano i momenti d’inerzia di una distribuzione piana di massa giacente nel piano
XY , rispetto agli assi ortogonali: il momento rispetto all’asse Z, perpendicolare al piano in cui giace la
massa, è sempre uguale alla somma dei momenti rispetto agli altri due assi.
Il momento d’inerzia di un sistema rispetto �
a un asse direzionato come il versore u e passante
2
per il punto C vale, secondo la (4.5.2), Iu,C = i mi [ (Pi − C) × u ] . Se G è il centro di massa
del sistema, possiamo scrivere il momento d’inerzia come
Iu,C =
�
i
=
�
i
+2
2
mi {[ (Pi − G) + (G − C) ] × u } =
2
mi [ (Pi − G) × u ] +
�
�
i
�
i
�
i
2
mi {[ (Pi − G) × u ] + [(G − C) × u ] } =
2
mi [(G − C) × u ] +
� �
�
�
mi [ (Pi − G) × u ] ·
mi [(G − C) × u ] = Iu,G + M D2
i
(4.7.2)
�
2
Nel secondo termine del penultimo passaggio,
m
[(G
−
C)
×
u
]
,
l’espressione
in
parentei
i
si quadre non dipende dai vari punti e quindi può essere portata fuori dalla somma, ottenendo
2
M [(G − C) × u ] ; osservando poi di nuovo la fig. 4.5.1 si comprende che l’espressione in parentesi quadre�rappresenta il quadrato della
� distanza fra gli assi. Nell’ultimo termine del penultimo
passaggio i mi [ (Pi − G) × u ] = [ i mi (Pi − G) ] × u = M (G − G) × u = 0.
Un metodo alternativo, meno elegante, di dimostrare il teorema consiste nel considerare una
terna cartesiana di riferimento avente l’origine �
nel centro di massa G del sistema, e di calcolare il
momento d’inerzia rispetto all’asse Z: IZ,G = i mi (x2i + yi2 ). Il momento d’inerzia rispetto ad
un asse parallelo all’asse Z e passante per un punto C vale
IZ,C =
�
i
=
�
�
�
mi (xi − xC )2 + (yi − yC )2 =
mi (x2i + yi2 ) +
i
= IZ,G +
�
i
(x2C
+
2
yC
)
�
i
= IZ,G + M D2
2
mi (x2C + yC
)−2
mi − 2 xC
�
i
i
mi xi xC − 2
mi xi − 2 yC
2
dove D2 = x2C + yC
è la distanza fra gli assi, mentre
123
�
�
i
�
�
i
mi yi yC =
(4.7.3)
mi yi =
i
mi xi = M xG = 0 e analogamente per
4.7
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
a)
b)
z
D
C
C
G
G
yc
Pi
y
xc
x
Fig. 4.7.3: Teorema di Huygens–Steiner: in a) il momento d’inerzia rispetto all’asse passante per C
è uguale a quello rispetto all’asse parallelo passante per il centro di massa G aumentato dell’espressione
M D2 dove M è la massa del sistema e D la distanza fra gli assi. In b) la dimostrazione del teorema è
fatta considerando direttamente le coordinate dei punti del sistema.
�
i
mi yi .
4.8 Esempi di calcolo di momenti d’inerzia
4.8.1 Sbarra rettilinea sottile
Consideriamo una sbarra rettilinea9 di lunghezza 2l, sottile (ossia con le dimensioni trasversali
trascurabili rispetto alla lunghezza), di massa M omogeneamente distribuita. Vogliamo calcolare
il suo momento d’inerzia rispetto a un asse passante per il centro di massa, che coincide col centro
geometrico della sbarretta. Poniamo un asse X con l’origine nel centro di massa e consideriamo il
contributo al momento d’inerzia di un elemento infinitesimo di sbarretta, di lunghezza dx, posto
alla coordinata x. Se λ è la densità lineare di massa (λ = M/2l), l’elemento dà al momento
d’inerzia totale un contributo infinitesimo dI = x2 λ dx. Il momento d’inerzia si ottiene sommando
con un integrale il contributo di tutti gli elementi
I=
�
l
−l
λ x2 dx =
2 3 1
λ l = M l2
3
3
(4.8.1)
4.8.2 Rettangolo e parallelepipedo
Vogliamo calcolare il momento d’inerzia di una distribuzione di massa piana e omogenea a forma
di rettangolo, di lati 2a e 2b, massa totale M , rispetto a un asse passante per il centro di massa e
9
Si noti che negli esempi che seguono e in generale le lunghezze di segmenti saranno date come 2l o in modo analogo
quando ha qualche significato fisico (posizione del centro di massa) il punto posto a metà lunghezza. Si faccia quindi
attenzione al fatto che altri testi potrebbero riportare formule apparentemente diverse per i momenti d’inerzia degli
oggetti trattati di seguito, dovute al fatto che con l intendono l’intera lunghezza dell’oggetto.
4.8.2
124
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
perpendicolare al rettangolo. Usiamo un sistema di coordinate con l’origine nel centro di massa,
l’asse X parallelo al lato di lunghezza 2a e l’asse Y a quello
di lunghezza 2b. Partiamo a calcolare
�
il momento d’inerzia rispetto all’asse y, dato da Iy = i mi x2i . Per la prima proprietà enunciata
in 4.7, possiamo spostare i vari punti del rettangolo su traiettorie parallele all’asse Y , fino a giacere
sull’asse X, formando una sbarretta omogenea di lunghezza 2a. Quindi Iy = (1/3) M a2 . Con
ragionamento analogo ricaviamo Ix = (1/3) M b2 . Per la proprietà dei momenti delle figure piane
il momento rispetto all’asse perpendicolare al piano vale
Iz = Ix + Iy =
1
M (a2 + b2 )
3
(4.8.2)
Se consideriamo ora un parallelepipedo omogeneo avente spigoli di lunghezza 2a, 2b e 2c, e vogliamo
calcolare il momento d’inerzia rispetto a un asse parallelo agli spigoli di lunghezza 2c passante per
il centro di massa, possiamo “schiacciare” tutta la massa a formare un rettangolo omogeneo di lati
2a e 2b. Quindi il momento d’inerzia del parallelepipedo risulta dato dalla stessa formula (4.8.2).
a)
b)
Iy=⅓M l2
y
Iz=⅓M (a2+b2)
z
l
y
D
dx
x
G
G
2c
A
2b
Ix=⅓M a2
C
x
Ix=⅓M b2
B
2a
Fig. 4.8.1: Momenti d’inerzia di una sbarra sottile, di un rettangolo e di un parallelepipedo omogenei.
In a) si calcola il momento d’inerzia della sbarra rispetto ad un asse ortogonale ad essa, sommando il
contributo di ciascun elemento infinitesimo di lunghezza dx. In b) si calcolano i momenti d’inerzia del
rettangolo ABCD rispetto ai due assi che stanno nel piano della figura. Per ciascun momento si può
concentrare la massa in una sbarretta. Il momento d’inerzia del rettangolo rispetto all’asse perpendicolare
al piano è dato dalla somma di quelli precedentemente calcolati. Esso poi corrisponde anche al momento
d’inerzia di un parallelepipedo omogeneo avente per base il rettangolo e di altezza qualunque.
4.8.3 Momenti d’inerzia di un cerchio
Consideriamo un cerchio omogeneo di raggio R e massa M . Utilizziamo un sistema di riferimento
con l’origine nel centro del cerchio, che è il centro di massa, gli assi X e Y nel piano del cerchio e
l’asse Z perpendicolare. Vogliamo calcolare il suo momento d’inerzia rispetto all’asse Z. L’oggetto
avrà una densità superficiale di massa σ = M/πR2 ; possiamo suddividerlo in una serie di corone
circolari di raggio r e larghezza dr. La massa di ciascuna corona vale dm = σ 2π r dr. Tutti i
punti di una corona si trovano alla medesima distanza r dall’asse rispetto a cui vogliamo calcolare
il momento d’inerzia, per cui la corona dà un contributo al momento d’inerzia totale pari a dI =
dm r2 = σ 2π r3 dr. Troviamo il momento d’inerzia del cerchio sommando il contributo di ogni
corona mediante un integrale
Iz =
�
R
σ 2π r3 dr =
0
125
1
1
σ π R4 = M R2
2
2
(4.8.3)
4.8.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
y
z
y
r
x
O
x
O
Fig. 4.8.2: Momenti d’inerzia di un cerchio. Il momento rispetto all’asse Z, perpendicolare al piano della
figura, si calcola sommando i contributi di corone circolari infinitesime.
A questo punto è facile calcolare anche il momento d’inerzia rispetto a un asse passante per il
centro di massa e contenuto nel piano del cerchio, come gli assi X e Y . Sfruttando le proprietà dei
momenti d’inerzia di una figura piana e la simmetria del cerchio avremo
�
Ix = Iy
Ix + Iy = Iz
⇒
Ix = Iy =
1
1
Iz = M R2
2
4
(4.8.4)
4.8.4 Momenti d’inerzia di un cilindro
Consideriamo un cilindro omogeneo di massa M , raggio R e altezza 2h. Vogliamo calcolare
i momenti d’inerzia rispettivamente rispetto all’asse di simmetria e a un asse ad esso ortogonale
passante per il centro di massa. Utilizziamo un sistema di coordinate con l’asse X coincidente
con l’asse di simmetria e l’origine nel centro di massa, che si trova ovviamente a ugual distanza h
dalle basi. Il momento d’inerzia Ix del cilindro si può calcolare “schiacciando” la sua massa in un
cerchio omogeneo avente il centro di massa per centro e giacente nel piano Y Z, ossia parallelo alle
basi. Esso risulta quindi uguale a quello calcolato in 4.8.3 e quindi Ix = (1/2) M R2 .
z
dx
z
h
y
R
G
G
x
x
dx
Fig. 4.8.3: Momenti d’inerzia di un cilindro omogeneo. Il momento rispetto all’asse di simmetria X
si può calcolare concentrando tutta la massa in un cerchio. Il momento rispetto agli assi Y e Z si calcola
sommando i contributi di “fette” di spessore infinitesimo dx.
Per calcolare il momento d’inerzia rispetto a un asse ortogonale a quello di simmetria, come
l’asse Z, suddividiamo il cilindro in “fette” tagliate perpendicolarmente all’asse di simmetria, di
4.8.4
126
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
spessore infinitesimo dx. La densità volumetrica di massa del cilindro è ρ = M/(2π R2 h) e la
massa di ciascuna fetta vale dm = ρ π R2 dx. Il contributo della fetta al momento d’inerzia del
cilindro è dato dalla somma di due termini: il momento d’inerzia della fetta rispetto a un asse
parallelo all’asse Z passante per il centro di massa della fetta, dato dalla (4.8.5), più il termine del
teorema di Huygens–Steiner, ossia la massa della fetta per il quadrato della distanza fra il suo asse
e l’asse Z. Avremo quindi dI = (1/4) dm R2 + dm x2 . Calcoliamo il momento d’inerzia del cilindro
sommando i contributi con un integrale
�
�
�
� h
1 2
1 2
2
2
Iz =
R +x
dm =
ρπ
R +x
R2 dx =
4
4
−h
−h
�
�
�
�
1 4
2 2 3
1 2 1 2
= ρπ
R h+ R h =M
R + h
2
3
4
3
�
h
�
(4.8.5)
4.8.5 Momento d’inerzia di una sfera
Vogliamo calcolare il momento d’inerzia di una sfera omogenea di massa M e raggio R rispetto
a un asse passante per il suo centro, che è anche il centro di massa. Utilizziamo un sistema
di riferimento cartesiano con l’origine nel centro e notiamo che, per la simmetria della sfera, i
momenti d’inerzia rispetto a qualsiasi asse passante per il centro sono uguali. Scegliamo di calcolare
il momento rispetto all’asse X e suddividiamo la sfera con piani perpendicolari a detto asse, in
“fette” di spessore infinitesimo dx. La fetta
√ che si trova a distanza x dal centro è approssimabile
come un cilindro di altezza dx e raggio R2 − x2 . Se la densità della sfera è ρ = 3 M/(4π r3 ), la
massa di ogni fetta è dm = ρ π (R2 − x2 ) dx e il suo momento d’inerzia rispetto all’asse X vale,
per la (4.8.4), dI = (1/2) ρ π (R2 − x2 )2 dx. Otteniamo il momento d’inerzia della sfera sommando
i contributi con un integrale
I=
�
R
−R
1
1
ρ π (R2 − x2 )2 dx = ρ π
2
2
�
R
−R
(R4 + x4 − 2 R2 x2 ) dx =
z
8
2
ρ π R5 = M R2 (4.8.6)
15
5
z
dx
y
G
G
x
x
Fig. 4.8.4: Momento d’inerzia di una sfera rispetto a un asse passante per il centro.
127
4.8.5
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
z
a)
F2y
y
b)
F2x
P2
Fy
Fx
O
y
x
C
x
F1y
P1
Fz
F1x
Fig. 4.9.1: Vincoli di perno. In a) un corpo rigido è vincolato a muoversi solo ruotando intorno
all’asse Z. Sono illustrati i due cuscinetti che impediscono all’asse di cambiare direzione e il vincolo che
impedisce al corpo di traslare nella direzione dell’asse. In b) è schematizzato un sistema piano, con le
forze applicate dal perno al corpo.
4.9 Alcuni risultati sui momenti di forza
4.9.1 Il vincolo di perno
Un tipo di vincolo molto comune, applicato a corpi rigidi, è quello che impedisce tutti i moti salvo
quelli intorno ad un asse determinato. Se vogliamo vincolare in questo modo un corpo, dobbiamo di
norma applicare delle forze vincolari almeno in due punti diversi lungo l’asse di rotazione permessa.
Questo perché se applicassimo le forze vincolari in un unico punto P, potremmo impedire a quel
punto del corpo di muoversi, ma, scrivendo la II cardinale con centro di riduzione in P, vediamo che
dette forze darebbero momento nullo e quindi non potrebbero mantenere fermo l’asse contrastando
altre forze che, esercitando un momento, tendessero a fargli cambiare direzione. Questo fatto è ben
esemplificato anche negli oggetti di uso comune: ad esempio le porte hanno almeno due cardini
posti verso le due estremità di un lato verticale.
In fig. 4.9.1 a è illustrato un corpo rigido vincolato muoversi ruotando solo intorno all’asse Z.
L’asse è mantenuto fermo da due perni posti nei punti P1 e P2 Ciascun perno applicherà al corpo
forze in direzione X e Y . Le forze F1x e F2x daranno una risultante tale da impedire una traslazione
dell’intero asse in direzione X e un momento risultante tale da impedire la rotazione dell’asse nel
piano XZ. Le forze F1y e F2y impediscono la traslazione in direzione Y e la rotazione nel piano Y Z.
A questo punto il corpo, oltre a ruotare intorno all’asse Z, potrebbe traslare in direzione Z: per
impedire questo movimento dovremo prevedere un fermo capace di fornire una forza in direzione
Z, come mostrato in figura. Se il vincolo è ideale, non dovrà influenzare il moto di rotazione
intorno all’asse Z, e questo si traduce nel fatto che le forze vincolari non dovranno generare un
momento nella direzione dell’asse di rotazione. Questo avverrà se le rette di applicazione delle
forze passeranno per, o, nel caso di Fz , coincideranno con l’asse Z.
Dato che nel moto intorno ad un asse fisso ogni punto si muove in un piano perpendicolare
all’asse, è spesso possibile e conveniente schematizzare il sistema come piano e considerare il perno,
per quanto riguarda il moto nel piano, come un vincolo applicato in un solo punto. In fig. 4.9.1 b
vediamo cosı̀ schematizzato un corpo vincolato a ruotare nel piano XY intorno al punto O fisso.
Il perno esercita sul corpo forze sia in direzione X che Y e se il vincolo è ideale possiamo pensare
le forze applicate nel punto O, in modo da non dare momento rispetto ad esso. Considerare due
reazioni Fx e Fy di intensità e verso arbitrari corrisponde a considerare una sola forza vincolare F,
nel piano XY , con intensità, direzione e verso arbitrari, ma nella risoluzione dei problemi è quasi
4.9.1
128
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
sempre più conveniente la prima schematizzazione. Le forze Fx e Fy corrispondono alla somma
delle forze applicate nei due punti P1 e P2 dell’esempio precedente.
4.9.2 Vincoli di massa trascurabile
Nella sezione 3.6.2 abbiamo visto che un oggetto di massa trascurabile che vincoli rigidamente fra
loro altri oggetti dovrà esercitare su di essi forze la cui somma vettoriale sia nulla. Se consideriamo
per esso anche la II equazione cardinale, la massa trascurabile corrisponde ad avere P = L = 0,
per cui dalla (4.1.6) e dalla (4.4.5) abbiamo immediatamente Re = 0 e τ e = 0. Se la risultante
e il momento risultante delle forze applicate sul vincolo devono essere nulli, cosı̀ devono essere
anche, per il terzo principio, risultante e momento risultante delle forze applicate dal vincolo ai
corpi ad esso collegati. Consideriamo come esempio un caso piano, in cui una sbarra rigida di
massa trascurabile è imperniata a una estremità nel punto A di un corpo e all’altra estremità
nel punto B di un secondo corpo. La sbarra applicherà al primo corpo nel punto A una forza
FA = FAx i + FAy j e al secondo corpo in B una forza FB = FBx i + FBy j. La risultante delle due
forze deve essere nulla per quanto detto sopra: FA = −FB . Le due forze quindi costituiscono una
coppia, ma dovendo avere anche momento risultante nullo, il braccio della coppia dovrà annullarsi,
e quindi le forze si trovano sulla stessa retta d’azione. In pratica, la sbarretta esercita sui due corpi
forze di ugual modulo e direzione, verso opposto, dirette secondo la linea che unisce i due perni.
FAy
A
FAx
y
x
FBx
O
B
FBy
Fig. 4.9.2: Una sbarra di massa trascurabile è imperniata alle due estremità a due corpi diversi.
Essa esercita su di essi forze uguali in modulo e direzione, opposte in verso, aventi come retta d’azione la
linea che passa per i due perni.
4.9.3 Momento risultante delle forze peso
Calcoliamo il momento risultante τ p delle forze peso applicate a un sistema: su ogni punto
materiale di massa mi agirà una forza Fi = mi g u, dove u è il versore della verticale discendente.
Avremo quindi, rispetto a un centro di riduzione C
τp =
�
i
(Pi − C) × mi g u =
�
�
i
�
mi (Pi − C)
× g u = (G − C) × M g u
(4.9.1)
La (4.9.1) significa che il momento risultante delle forze peso applicate a un sistema corrisponde a
quello che si calcolerebbe se tutta la massa fosse concentrata nel centro di massa. Questo risultato
129
4.9.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
ci permetterà, quando dovremo risolvere problemi usando le equazioni cardinali, di considerare
le forze peso come un’unica forza di intensità M g applicata al centro di massa del sistema. Per
questo motivo il centro di massa è chiamato anche baricentro.
Si tenga presente che questa equivalenza vale per quanto riguarda il momento risultante10 ma
non significa che le forze peso si possano considerare concentrate nel centro di massa in generale.
Ad esempio, se attaccassimo un oggetto pesante a un cavo d’acciaio, ogni parte del cavo dovrebbe
resistere al peso dell’oggetto e a quello del cavo al di sotto di essa. Questo effetto non è trascurabile
per i meccanismi che sollevano pesi su lunghi percorsi, come i montacarichi delle miniere. Se
considerassimo la forza peso del cavo concentrata realmente nel suo baricentro, tutte le parti di
cavo al di sotto di esso non ne risentirebbero.
4.10 Statica dei sistemi meccanici e dei corpi rigidi
La statica è quella branca della meccanica che si occupa dell’equilibrio dei sistemi meccanici. Si
dice che un sistema è in equilibrio se esso, a partire da una situazione in cui tutti i punti hanno
velocità nulle, si mantiene in quiete. Questo implica per il secondo principio della dinamica che la
somma delle forze agenti su ognuno dei punti materiali che lo compongono deve essere nulla. Se la
somma delle forze su ogni punto è nulla, risultano nulli anche la risultante delle forze esterne e il
momento risultante. Questo tuttavia non ci assicura l’inverso, ossia in generale l’annullamento della
risultante delle forze esterne e del momento risultante non costituiscono una condizione sufficiente
per l’equilibrio.
Per un corpo rigido invece le equazioni cardinali sono sufficienti a determinare il moto; quindi
se risultante e momento risultante delle forze esterne sono nulli e il sistema si trova inizialmente in
quiete, avremo una situazione d’equilibrio.
4.11 Esempi di studio di moti di sistemi
Diamo di seguito alcuni esempi di studio di moti di sistemi. Il metodo di approccio è ancora
quello descritto nella sezione 3.9, ma potremo applicare le equazioni cardinali per determinare il
moto dei corpi rigidi che eventualmente si presentino nel sistema meccanico.
4.11.1 Ruota che rotola lungo un piano inclinato
Il problema è analogo a quello risolto in 3.5.2, ma questa volta abbiamo a che fare con una ruota
vincolata a rotolare senza strisciare su una guida rettilinea fissa, inclinata di un angolo α rispetto
all’orizzontale. La ruota sarà costituita, ad esempio, da un disco omogeneo di massa m e raggio r.
Supporremo la ruota inizialmente ferma sul piano.
Per la caratterizzazione cinematica del sistema ci riferiremo esattamente a quanto già fatto in
2.12, con l’unica differenza che adesso l’asse X del riferimento sarà inclinato di un angolo α rispetto
all’orizzontale. Useremo come parametri per studiare il moto la coordinata x del centro di massa
(e geometrico) G della ruota e l’angolo ϕ che la congiungente detto centro con un punto fissato P
sul bordo della ruota forma, in senso antiorario, rispetto a una direzione fissa, quella del versore
−j. Varrà ancora la relazione cinematica (2.12.2): ẋ = −rϕ̇.
Alla nostra ruota sono applicate le seguenti forze esterne:
– forze peso: dato che per la risoluzione del sistema mediante le equazioni cardinali ci interesserà
solo la risultante e il momento risultante di esse, in base alla proprietà dimostrata in 4.9.3
10
Vedremo nel seguito che la stessa proprietà vale anche per l’energia potenziale delle forze peso.
4.11.1
130
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
y
O
G
N
ϕ
Q
T
mg
P
x
α
Fig. 4.11.1: Una ruota è vincolata a rotolare senza strisciare lungo un piano inclinato.
potremo considerare un’unica forza di modulo mg applicata nel centro di massa della ruota.
– Una reazione vincolare della guida applicata, in direzione normale alla medesima, al punto Q
della ruota che è via via istantaneamente a contatto con la guida, indicata con N = N j.
– Perché si possa mantenere il rotolamento puro, il punto Q della ruota deve avere istantaneamente
velocità nulla. Questo implica in generale la presenza di una forza esercitata dalla guida su Q
in direzione tangenziale, che indichiamo con T = T i. Per adesso la necessità di una forza
tangenziale è solo un’ipotesi, confortata dall’esperienza quotidiana per cui fra gli pneumatici
dei veicoli e il terreno deve esserci sufficiente attrito. Sarà la soluzione stessa del problema a
dimostrare la necessità della forza tangenziale.
Si noti che mentre il verso della forza peso è determinato a priori e anche quello di N si deve
pensare rivolto nel verso del versore j, dato che impedisce alla ruota di penetrare nella guida, non
sappiamo a priori in che verso sia diretta T. In questi casi non è né necessario né utile cercare di
“indovinare” a priori il verso, ma se ne fissa uno arbitrariamente: se nel moto risultante T dovesse
avere verso opposto a quello fissato la componente T assumerebbe un valore negativo.
A questo punto possiamo scrivere le equazioni di moto della ruota, che saranno date dalle due
componenti X e Y della prima equazione cardinale e dalla componente Z della seconda cardinale.
Infatti la ruota ha un moto roto–traslatorio in cui il centro di massa si muove su una traiettoria
parallela alla guida, mentre gli altri punti ruotano intorno con velocità angolare11 ω = ϕ̇ k fissa in
direzione. Utilizziamo il centro di massa come centro di riduzione per i momenti e la (4.6.2) diventa
I ω̇ = I ϕ̈, dove I è il momento d’inerzia della ruota rispetto a un asse diretto come il versore k
passante per il centro di massa. Per un disco omogeneo vale la (4.8.4) per cui I = (1/2) m r2 .
L’unica forza esterna che dà momento rispetto al centro di massa è T e il suo momento vale12
τ T = (Q − G) × T i = −r j × T i = T r k. Abbiamo quindi le equazioni di moto
11
12
m ẍ = mg sin α + T
0 = N − mg cosα
I ϕ̈ = T r
(4.11.1)
Il segno positivo nella relazione che lega la velocità angolare a ϕ dipende dall’aver scelto l’angolo crescente per
rotazioni in senso antiorario.
Di seguito diamo il calcolo formale del momento della forza: con l’esperienza si potranno ricavare questo genere di
risultati assai più rapidamente. Nel caso, ad esempio, forza e vettore spostamento si trovano nel piano XY , per
cui il momento sarà diretto secondo k; il braccio della forza è r e T tenderebbe a far ruotare il corpo in direzione
antioraria, per cui prendiamo il segno positivo.
131
4.11.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Nella terza delle (4.11.1) possiamo sostituire a ϕ̈ il valore −ẍ/r che si ricava dalla relazione cinematica. Ricavando poi T e sostituendo nella prima equazione troviamo
m ẍ = mg sin α −
I
ẍ
r2
⇒
ẍ = g sin α
1
1+
I
m r2
(4.11.2)
La (4.11.2) costituisce la soluzione del moto e ci mostra che il centro di massa della ruota scende
con accelerazione costante, come nel caso del corpo che trasla su un piano inclinato senza attrito,
ma la sua accelerazione è minore di quella, pari a g sin α, trovata in 3.5.2 per il moto puramente
traslatorio. Per il disco risulta minore di un fattore 2/3.13
Sostituendo il valore dell’accelerazione trovato con la (4.11.2) nella terza delle (4.11.1) possiamo
determinare l’entità della forza tangenziale.
T =−
I
I
m r2
ẍ
=
−mg
sin
α
r2
1 + mIr2
(4.11.3)
La (4.11.3) dimostra la necessità di una forza tangenziale per mantenere il rotolamento puro. Si
vede anche che la forza è proporzionale all’accelerazione del centro di massa. Il valore trovato di T
è negativo, per cui la forza è diretta in senso opposto a quello in cui l’abbiamo fissata inizialmente.
Interpretiamo questo fatto osservando che per mantenere il rotolamento puro se il centro di massa
cambia velocità deve cambiare anche la velocità angolare della ruota e T è l’unica forza che dà
momento rispetto al centro di massa e può quindi causare un’accelerazione angolare. Se la guida
a un certo punto curvasse verso l’alto e diventasse orizzontale, il moto soddisfarebbe ancora le
equazioni (4.11.1), ma con α = 0 Risulta ẍ = ϕ̈ = 0 e T = 0. In questa situazione la forza
tangenziale richiesta è nulla, ma solo perché la velocità del centro di massa e quella angolare
rimangono costanti e il rotolamento puro si mantiene da solo.
Ci possiamo anche porre questo problema: se la forza tangenziale dovesse essere prodotta da
attrito statico nel punto di contatto, quale dovrebbe essere il valore minimo del coefficiente d’attrito
per evitare lo slittamento della ruota? Possiamo rispondere facilmente osservando innanzitutto che,
dovendo essere il punto della ruota in contatto con la guida istantaneamente fermo, l’attrito dovrà
essere statico e dovrà valere la (3.7.1), dove N e T coincidono esattamente con le forze omonime
del caso presente. Si dovrà avere
µs ≥
|T|
|N|
⇒
µs ≥ tan α
1
I
m r2
+ mIr2
(4.11.4)
Possiamo infine studiare il caso in cui il coefficiente d’attrito non è sufficiente per mantenere il
rotolamento puro. In questo caso non avremo più la relazione cinematica fra velocità del centro di
massa e velocità angolare, mentre la forza T sarà data dalla (3.7.3). In modulo avremo |T| = µd |N|.
Il verso di T è opposto alla velocità del punto di contatto Q della ruota con la guida. Questo implica
che T sia diretta in senso opposto all’asse X. Se supponessimo infatti che non esistesse l’attrito
la ruota scenderebbe traslando lungo il piano inclinato senza girare (I ϕ̈ = 0 e ϕ̇(0) = 0). Il punto
13
Si noti che non abbiamo sostituito immediatamente il valore esplicito di I per il disco, (1/2) m r2 , nelle formule.
Questo sia perché cosı̀ i nostri risultati restano validi anche per una ruota con diversa distribuzione di massa, sia perché rimane traccia nelle formule dei contributi dovuti alla rotazione, per cui risulta più facile la loro interpretazione,
o la correzione di un eventuale errore che si fosse verificato nei passaggi precedenti.
4.11.1
132
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Q avrebbe la stessa velocità di G e quindi una velocità diretta nel senso positivo dell’asse X. Se
l’attrito è insufficiente a mantenere istantaneamente fermo Q, questo avrà ancora velocità nello
stesso senso. Possiamo anche ragionare sul fatto che in caso di rotolamento puro T è diretta in
senso opposto all’asse X: se l’attrito è insufficiente avremo ancora una forza diretta nello stesso
senso ma di intensità inferiore a quella necessaria per mantenere il rotolamento. Le equazioni di
moto rimangono le (4.11.1), ma al posto della relazione cinematica fra i parametri di moto avremo
T = −µd |N | = −µd mg cos α
(4.11.5)
Inserendo nelle (4.11.1) abbiamo
�
m ẍ = mg sin α − µd mg cos α
I ϕ̈ = −µd mg r cos ϕ
⇒
�
ẍ = g (sin α − µd cos α)
ϕ̈ = −µd g mI r cos α
(4.11.6)
Possiamo verificare che se le accelerazioni lineare e angolare della ruota sono date dalle (4.11.6)
il punto Q ha sempre velocità diretta nel verso dell’asse x. Infatti la velocità di Q è data dalla
(2.12.1): vQ = (ẋ + r ϕ̇) i. Se la ruota parte da ferma con le accelerazioni date dalle (4.11.6)
ẋ(t) = ẍ t e ϕ̇(t) = ϕ̇ t. Sostituendo i valori dati dalle (4.11.6) si ricava che ẋ + r ϕ̇ > 0 se µd non
verifica la relazione (4.11.4) che dà il minimo valore di attrito per il rotolamento puro.
4.11.2 Pendolo composto
Si chiama pendolo composto o pendolo fisico un corpo rigido di massa m vincolato a ruotare
intorno ad un asse orizzontale fisso, con il centro di massa non sull’asse medesimo. Consideriamo
un sistema di riferimento con l’origine O sull’asse di rotazione e l’asse X diretto come la verticale
discendente e l’asse Y perpendicolare all’asse di rotazione, che viene a coincidere con l’asse Z.
Scegliamo poi la posizione di O in modo che il centro di massa G del corpo si trovi sul piano
XY . Il corpo può essere esteso anche in direzione Z ma ogni suo punto, potendo solo ruotare, si
muoverà in un piano parallelo al piano XY .
V
O
H
y
h
ϕ
G
mg
x
Fig. 4.11.2: Pendolo composto. In figura è rappresentata la sezione del corpo perpendicolare all’asse
di rotazione e passante per il centro di massa.
133
4.11.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Possiamo considerare la fig. 4.11.2, dove è indicata la sezione del corpo nel piano XY . Sia h
la distanza OG del centro di massa dall’asse di rotazione e ϕ l’angolo formato dalla congiungente
OG con l’asse x. Si noti l’analogia con la schematizzazione fatta in 3.9.4 per il pendolo semplice.
Per quanto riguarda le forze applicate al sistema, avremo la forza peso che per i nostri scopi
potremo considerare applicata in G, mentre il vincolo di asse fisso eserciterà delle forze in direzione
sia dell’asse X sia dell’asse Y , le cui risultanti sono indicate come V = −V i e H = H j e hanno
come rette d’azione gli assi del sistema di riferimento. I versi delle forze sono stati scelti arbitrariamente: quelli effettivi si potranno ricavare solo dopo aver risolto il problema di moto. Vi saranno
eventualmente anche forze dirette lungo l’asse Z, che però non compariranno nell’equazione di
moto e quindi possiamo non considerare nel nostro schema.
Per risolvere il problema del moto applichiamo la seconda equazione cardinale nella direzione
dell’asse Z con centro di riduzione O, fisso. La velocità angolare del corpo è data da ω = ϕ̇ k. Se
IG è il momento d’inerzia del corpo rispetto ad un asse parallelo all’asse Z passante per il centro di
massa, il momento d’inerzia rispetto all’asse di rotazione vale, per il teorema di Huygens–Steiner,
I = IG + m h2 . La seconda equazione cardinale risulta
(IG + m h2 ) ϕ̈ = −mg h sin ϕ
⇒
ϕ̈ = −g
mh
sin ϕ
IG + m h2
(4.11.7)
Se chiamiamo lunghezza equivalente del pendolo composto la quantità leq = (IG + m h2 )/(m h) la
(4.11.7) diventa ϕ̈ = −(g/leq ) sin ϕ. Questa equazione di moto corrisponde a quella del pendolo
semplice (3.9.27). Possiamo quindi riutilizzare completamente lo studio fatto per quel sistema e
dire che un pendolo composto si muove esattamente come un pendolo semplice di una opportuna
lunghezza equivalente. Ovviamente ci riferiamo alla versione del pendolo semplice dove il vincolo
è dato da una sbarra rigida di massa trascurabile. Nel caso di un pendolo composto costituito da
una sbarra sottile omogenea di lunghezza 2l imperniata in un’estremità, il momento d’inerzia IG
è dato dalla (4.8.1) e la lunghezza equivalente risulta leq = (4/3) l.
4.11.3 Sbarra vincolata a due guide
Consideriamo un sistema meccanico costituito da una sbarra rigida sottile e omogenea AB di
massa m e lunghezza 2l. La sbarra si trova in un piano verticale e ha l’estremo A vincolato
a scorrere in una guida verticale fissa senza attrito, mentre l’estremo B scorre entro una guida
orizzontale fissa pure priva di attrito; A si trova più in alto di B. Consideriamo un sistema
di riferimento avente l’asse X passante per la guida orizzontale e l’asse Y per quella verticale.
Aggiungiamo al sistema una molla di costante k disposta in direzione orizzontale e con un estremo
attaccato al punto B della sbarra. La molla è montata in modo da fornire una forza F = −k x i,
dove x è l’ascissa del punto B.
Come primo problema cerchiamo, in funzione del valore k della costante della molla, le eventuali
posizioni di equilibrio del sistema.
Come sempre, iniziamo analizzando la cinematica: la sbarra vincolata in un piano ha tre gradi
di libertà, ma i due vincoli di scorrimento lungo le guide eliminano un grado di libertà ciascuno, per
cui avremo alla fine un solo grado di libertà. Notiamo poi che il centro di massa della sbarra, a metà
della sua lunghezza, ha una distanza fissa dall’origine O pari a l, la semi–lunghezza della sbarra.
Ciò deriva dalla nota proprietà geometrica per cui un triangolo rettangolo è inscrivibile in un cerchio
e la sua ipotenusa coincide con un diametro. Il centro dell’ipotenusa quindi è il centro del cerchio
e la sua distanza dal vertice opposto è pari al raggio. Ne risulta che i triangoli AGO e BGO sono
isosceli. Dobbiamo scegliere un parametro che dia l’informazione sulla configurazione del sistema:
potremmo scegliere la coordinata x del punto B, ma poi risulterebbe poco conveniente esprimere
� Esso
la rotazione della sbarra. Preferiamo quindi usare un angolo e scegliamo l’angolo ϕ = GAO.
rappresenta l’angolo formato dalla sbarra con una direzione fissa (la verticale discendente) e cresce
4.11.3
134
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
y
H
A
ϕ
G
l
mg
V
F
B
x
O
Fig. 4.11.3: Una sbarra rigida, sottile e omogenea è vincolata a muoversi in un piano verticale con
gli estremi che scorrono lungo due guide senza attrito.
quando la sbarra ruota in senso antiorario, per cui potremo scrivere la velocità angolare della
sbarra come ω = ϕ̇ k. Per mezzo dell’angolo ϕ possiamo esprimere la posizione di tutti i punti
della sbarra; in particolare
(G − O) = l sin ϕ i + l cos ϕ j
(4.11.8)
mentre xB = 2l sin ϕ.
Analizziamo adesso le forze che agiscono sul nostro sistema meccanico, costituito dalla sbarra.
Abbiamo la forza peso −mg j, che possiamo considerare applicata al centro di massa, dato che siamo
interessati solo alla sua risultante e al momento risultante. Il vincolo senza attrito della guida
verticale applica al punto A una forza orizzontale H = H i; analogamente la guida orizzontale
applica in B una forza verticale V = V j. Infine la molla applica in B una forza orizzontale
F = −k xB i = −2k l sin ϕ i. Per l’equilibrio del corpo rigido è sufficiente l’annullamento della
risultante e del momento risultante delle forze esterne. Per lo studio del moto il centro di riduzione,
se non si vuole introdurre il termine aggiuntivo nella (4.4.5) deve essere un punto fisso o il centro
di massa. Nel caso della statica però possiamo tener presente che se Re = 0 il momento risultante
delle forze esterne è invariante rispetto al centro di riduzione (vedi 4.3), per cui possiamo calcolarlo
rispetto al punto più conveniente dal punto di vista della semplicità dei calcoli. Uguagliamo quindi
a zero la risultante delle forze esterne nelle direzioni orizzontale e verticale e il momento risultante
delle medesime, che scegliamo di calcolare rispetto al punto B
H − F = 0
V − mg = 0
mg l sin ϕ − H 2l cos ϕ = 0
(4.11.9)
Ricavando H dalla prima due equazione delle (4.11.9) e sostituendolo nella terza avremo
mg l sin ϕ − 4k l2 sin ϕ cos ϕ = 0
⇒
�
sin ϕ = 0
mg
cos ϕ = 4k
l
solo se k ≥
mg
4l
(4.11.10)
Vediamo quindi che avremo sempre una posizione di equilibrio con ϕ = 0: in questa situazione
135
4.11.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
l’asta è verticale e la molla non è tesa; V = mg, ossia la forza esercitata dalla guida in B compensa
il peso, mentre H = 0. L’altra soluzione esiste solo se k ≥ mg/4l, perché deve essere cos ϕ ≤ 1;
vediamo che se k = mg/4l la posizione d’equilibrio data dalla soluzione coincide con l’altra già
trovata in ϕ = 0, mentre via via che k cresce oltre il valore–limite essa si sposta per valori maggiori
di ϕ.
Supponiamo adesso che il sistema sia tenuto in equilibrio dalla molla in una posizione ϕ = ϕ0 �= 0
e che la molla sia staccata da B. Vogliamo studiare il moto che ne consegue e, ad esempio, la
velocità angolare della sbarra quando arriva alla configurazione con ϕ = π/2. Dovremo scrivere le
equazioni cardinali della dinamica, e per la seconda useremo adesso G come centro di riduzione.
Calcoliamoci le componenti orizzontale e verticale dell’accelerazione di G derivando la (4.11.8)
rispetto al tempo
�
ẋG = l cos ϕ ϕ̇
ẏG = −l sin ϕ ϕ̇
⇒
�
ẍG = l cos ϕ ϕ̈ − l sin ϕ ϕ̇2
ÿG = −l sin ϕ ϕ̈ − l cos ϕ ϕ̇2
(4.11.11)
Possiamo scrivere la prima equazione cardinale della dinamica in direzione orizzontale e verticale,
più la seconda cardinale in direzione di ω
m l (cos ϕ ϕ̈ − sin ϕ ϕ̇2 = H
m l (sin ϕ ϕ̈ − cos ϕ ϕ̇2 ) = V − mg
I ϕ̈ = V l sin ϕ − H l cos ϕ
(4.11.12)
Dove I = (1/3) m l2 è il momento d’inerzia della sbarra rispetto a un asse parallelo a ω passante
per G. Dalle prime due equazioni si ricavano i valori di H e V e si sostituiscono nella terza
I ϕ̈ = mg l sin ϕ − m l2 sin2 ϕ ϕ̈ − m l2 sin ϕ cos ϕ ϕ̇2 − m l2 cos ϕ ϕ̈ + m l2 sin ϕ cos ϕ ϕ̇2
⇒
(I + m l ) ϕ̈ = mg l sin ϕ
2
⇒
(4.11.13)
Otteniamo cosı̀ l’equazione che, integrata, ci permette di calcolare l’andamento temporale di ϕ, e
quindi di conoscere il moto. Possiamo integrare l’equazione moltiplicando entrambi i membri per
ϕ̇
�
�
1
(I + m l2 ) ϕ̇2 (t) − ϕ̇2 (0) = −mg l [cos ϕ(t) − cos ϕ(0)]
2
(4.11.14)
Con le condizioni iniziali ϕ(0) = ϕ0 e ϕ̇(0) = 0 avremo
(I + m l2 ) ϕ̇ ϕ̈ = mg l sin ϕ ϕ̇
⇒
ϕ̇2 =
3 g
[cos ϕ0 − cos ϕ]
2 l
(4.11.15)
La velocità angolare con cui si raggiungerà la configurazione ϕ = π/2 è
ϕ̇ϕ=π/2 =
4.11.3
�
3 g
cos ϕ0
2 l
136
(4.11.16)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
5.
Energia meccanica
Questo capitolo è dedicato allo studio dell’energia meccanica, che costituisce un caso particolare
della grandezza fisica energia. L’energia è forse la grandezza più importante che esista in fisica,
sia perché nelle sue varie forme si trova in ogni branca (meccanica, termodinamica, elettrologia e
fisica microscopica, quantistica e relativistica), sia perché è la grandezza fisica “con cui bisogna
sempre fare i conti”, al cui bilancio è impossibile sfuggire. Di seguito introdurremo i vari concetti
e grandezze fisiche che ci porteranno a definire l’energia meccanica.
5.1 Le macchine semplici e il lavoro meccanico
Per sostenere direttamente un oggetto è necessario applicarvi una forza che compensi esattamente la forza peso. Se vogliamo sollevarlo dobbiamo applicare, almeno per un certo tempo, una
forza anche di poco superiore alla forza peso, in modo da avere un’accelerazione verso l’alto, dopo
di che possiamo tornare ad applicare una forza uguale e contraria alla forza peso. Tuttavia fin
dall’antichità l’uomo ha inventato delle macchine con cui si può sollevare un oggetto applicando
una forza inferiore al suo peso.
y
y
a)
A
F
lB
V
lA O
V
B
b)
r2
r1
θ
H
H
x
F
θ
x
mg
mg
Fig. 5.1.1: Due esempi di macchine semplici: a) leva, b) paranco. In entrambi i casi è possibile
sollevare un oggetto di peso mg utilizzando una forza F inferiore al peso, ma lo spostamento del peso è
in ugual proporzione minore a quello del punto di applicazione di F .
In fig. 5.1.1 a) abbiamo una leva, ossia una sbarra imperniata intorno ad un asse orizzontale
passante per il suo punto O sito a distanze rispettivamente lA e lB dai due estremi. All’estremo A
della sbarra è applicata una fune a cui è appeso un corpo di massa m, soggetto quindi a una forza
peso −mg j, a cui corrisponde una forza identica applicata alla sbarra in A. All’altra estremità è
applicata verso il basso una forza F = −F j. Studiamo l’equilibrio della sbarra, fissando un sistema
di riferimento con origine in O, l’asse X orizzontale e l’asse Y verticale. Il vincolo in O applica
alla sbarra una forza vincolare che in generale può avere una componente H = H i orizzontale e
137
5.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
una componente V = V j verticale. Scriviamo le equazioni cardinali per l’equilibrio della sbarra
H = 0
V − mg − F = 0
mg lA cos θ − F lB cos θ = 0
(5.1.1)
Dalle (5.1.1) traiamo le seguenti conclusioni
– Il vincolo nel fulcro non deve esercitare sulla sbarra una reazione orizzontale, mentre la reazione
verticale equivale alla somma del peso dell’oggetto e della forza usata per sollevarlo.
– Per La forza F abbiamo F = mg lA /lB . Se lB > lA F < mg, ossia riusciremo a sollevare
l’oggetto con una forza inferiore al suo peso.
– Se vorremo sollevare il peso di un tratto sA dovremmo abbassare il punto di applicazione di
F di un tratto sB in generale diverso da sA . Se ad esempio volessimo innalzare l’oggetto fino
alla posizione in cui la sbarra è orizzontale, avremmo sA = lA sin θ e sB = lB sin θ; si può
dimostrare poi facilmente che qualunque sia sA vale la relazione sB = sA lB /lA . Se spostiamo
la posizione del punto O, detto fulcro della leva, lungo la sbarra, cambiando il rapporto lA /lB
abbiamo tutta una serie di situazioni in cui possiamo sollevare l’oggetto con forza maggiore o
minore, ma contemporaneamente dobbiamo spostare il punto di applicazione della forza di un
tratto proporzionalmente minore o maggiore. A parità del tratto sA di cui solleveremo l’oggetto,
avremo sempre F sB = mg sA , ossia la quantità F sB non dipende dalla posizione del fulcro.
In fig. 5.1.1 b abbiamo un paranco, costituito da due cilindri di raggi r1 e r2 rigidamente uniti
fra loro in modo da avere lo stesso asse di simmetria. I cilindri sono vincolati a ruotare intorno a
un asse orizzontale fisso. Sul bordo del cilindro di raggio r1 è arrotolata una fune che reca appeso
all’estremità l’oggetto da sollevare, mentre sul bordo del cilindro di raggio r2 è arrotolata, in senso
opposto, una fune a cui viene applicata la forza F con cui vogliamo sollevare l’oggetto. Studiamo
l’equilibrio del paranco in un sistema di riferimento centrato sull’asse di rotazione con l’asse X
orizzontale e l’asse Y verticale. Al paranco è applicata dalla prima funicella una forza −mg j e
dalla seconda funicella una forza −F j, mentre il vincolo può esercitare una reazione orizzontale
H = H i e una verticale V = V j, applicate su un punto dell’asse. Le equazioni cardinali risultano
H = 0
V − mg − F = 0
mg r1 − F r2 = 0
(5.1.2)
Anche in questo caso possiamo trarre conclusioni
– Il vincolo non deve esercitare una reazione orizzontale ma ne esercita una verticale che compensa
la somma del peso dell’oggetto e della forza usata per sollevarlo.
– Per la forza F abbiamo F = mg r1 /r2 . Variando il rapporto r1 /r2 possiamo sollevare l’oggetto
con una forza diversa, anche minore del suo peso.
– Se indichiamo con θ come in figura l’angolo di cui ruota il paranco, positivo in senso antiorario,
cosı̀ che la velocità angolare del paranco risulta ω = θ̇ k, la velocità del punto P1 del bordo del
cilindro di raggio r1 dove la fune si stacca dalla superficie del cilindro, tale che istantaneamente
(P1 − O) = r1 i , risulta vP1 = vO + ω × (P1 − O) = r1 θ̇ j. Il punto della corda che istantaneamente coincide con P1 , al confine fra la parte di corda arrotolata e quella libera, ha la
medesima velocità, come pure tutti i punti al di sotto di esso. Se il paranco ruota di un angolo
infinitesimo dθ, l’estremità della fune a cui è attaccato l’oggetto si solleva di un tratto r1 dθ e
di conseguenza a una rotazione di un angolo finito ∆θ corrisponde un sollevamento dell’oggetto
per un tratto r1 ∆θ. Con un ragionamento analogo si dimostra che alla stessa rotazione ∆θ
5.1
138
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
corrisponde un abbassamento dell’estremità della fune a cui è applicata F di un tratto r2 ∆θ.
Quindi a un sollevamento dell’oggetto di un tratto s1 = r1 ∆θ corrisponde un abbassamento del
punto di applicazione di F di un tratto s2 = r2 ∆θ, per cui s2 = s1 r2 /r1 . Anche in questo caso
vale sempre l’uguaglianza F s2 = mg s1 , indipendentemente dalla misura dei raggi dei cilindri
che costituiscono il paranco.
Questi sono solo due esempi di come sia possibile sollevare un oggetto utilizzando una forza
minore della sua forza peso, con uno spostamento proporzionalmente maggiore del punto di applicazione della forza, o viceversa con una forza maggiore e uno spostamento minore. La stessa
situazione si avrebbe se invece di contrastare la forza peso dovessimo contrastare una forza diversa,
come quella esercitata da una molla. Oggetti come la leva e il paranco appartengono alla categoria
delle cosiddette macchine semplici, di cui esistono moltissimi altri tipi, fra cui possiamo ricordare
ad esempio il “cric” che si usa per sollevare gli autoveicoli. La caratteristica di queste macchine è
di essere oggetti in se stessi completamente inerti,1 che funzionano in base a forze applicate dall’esterno. Lo stesso tipo di relazione fra forza e spostamento lo possiamo vedere anche senza bisogno
di macchine: consideriamo una persona che debba portare n mattoni dal pianterreno all’ultimo
piano di un palazzo, servendosi di una scala. Una persona particolarmente forte potrà caricarsi
tutti i mattoni addosso e fare un’unica salita, mentre una persona meno forte dovrà portare un
numero minore di mattoni per volta, facendo più viaggi. Anche in questo caso il prodotto della
forza usata dall’uomo per l’altezza totale di cui è salito contando i vari viaggi non dipende da come
viene suddiviso il carico e uguaglia sempre il peso totale dei mattoni moltiplicato per il dislivello
fra la loro posizione iniziale e finale. A questo punto vediamo che in tutti questi casi, con o senza
l’aiuto delle macchine semplici, sembra esistere una quantità invariante a parità di risultato che
vogliamo ottenere, ossia il prodotto della forza che dobbiamo esercitare per lo spostamento del suo
punto di applicazione. Per chiarirci meglio le idee analizziamo l’esempio che segue.
α
y
O
a)
α
B
A
y
O
x
b)
α
B
A
x
Fig. 5.1.2: Una persona deve portare una valigia dal punto O al punto B. Può scegliere se percorrere
prima il tratto piano OA e poi salire in verticale del tratto AB, oppure salire lungo il lato inclinato della
rampa OB. In a) l’uomo porta direttamente la valigia a mano, mentre in b) si serve di un carrello. In rosso
è indicata la forza peso della valigia, in verde la forza esercitata dall’uomo e in blu la reazione vincolare
che il carrello esercita sulla valigia. Nell’ovale tratteggiato è rappresentato ingrandito il diagramma di
corpo libero della valigia mentre si trova sul piano inclinato.
Una persona deve portare una valigia dal punto O al punto B di una rampa inclinata OAB,
avente OA = l e AB = h. La persona inizialmente decide di portare la valigia a mano, come in
fig. 5.1.2 a, e ha a disposizione due percorsi. Può portare la valigia in piano da O ad A, esercitando
su di essa una forza (in verde in figura) pari alla forza peso della valigia (in rosso); avremo quindi
F = mg e spostamento sOA = l. La persona quindi sale una scala verticale arrivando da A a B. La
forza esercitata è sempre F = mg e lo spostamento sAB = h. Il prodotto finale forza×spostamento
risulta uguale a mg (h + l). La persona può invece portare la valigia lungo la rampa inclinata OB:
1
Alla luce di quanto vedremo nel prossimo capitolo, il termine “inerti” si potrà precisare più rigorosamente dicendo
che le macchine non forniscono energia agli oggetti ad esse accoppiati.
139
5.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
in questo caso ancora
F = mg mentre per lo spostamento abbiamo sOB =
√
risultante è mg l2 + h2 .
√
l2 + h2 ; il prodotto
La persona però può anche decidere di usare, per portare la valigia, un carrello che supponiamo
di massa trascurabile e capace di muoversi senza attrito. Se sceglie il primo percorso visto nel caso
precedente, per il tratto OA dovrà solo esercitare una piccola forza orizzontale iniziale per fare
accelerare il carrello da fermo, dopo di che questo, nel nostro sistema idealizzato, si muoverà da
solo fino a raggiungere A; poco prima dell’arrivo un’altra piccola forza diretta all’indietro servirà
per farlo fermare. Questo succede perché ora la forza peso della valigia è compensata dalla reazione
vincolare (in blu) esercitata dal carrello, che a sua volta risente della reazione vincolare esercitata
dal pavimento. Le forze iniziali e finali possono essere piccole quanto vogliamo (se la persona non
ha fretta!) per cui il prodotto forza × spostamento è nullo. Nel tratto da A a B invece il carrello
non è di alcun aiuto: la persona dovrà caricarselo addosso e issarlo. In questa fase la persona
eserciterà una forza F sul carrello, che a sua volta eserciterà la sua reazione vincolare N sulla
valigia. In condizioni di equilibrio F = N = mg, per cui il prodotto forza × spostamento sul totale
del percorso vale mg h. Se la persona sceglie invece di spingere il carrello lungo la rampa inclinata
dovrà esercitare una forza (si veda l’ovale tratteggiato in fig. 5.1.2 b) F = mg sin α√, mentre il
2
2
carrello applicherà sulla valigia una forza N = mg cos α, dove
√ sin α = AB/OB = h/ l + h . Il
2
2
prodotto forza × spostamento vale in questo caso mg sin α l + h = mg h.
a mano
con carrello
tratto
F
s
Fs
F
s
Fs
OA
mg
l
mg l
0
l
0
AB
mg
h
mg h
mg
h
mg h
mg
√
l2 + h2
mg(l + h)
√
mg l2 + h2
OA + AB
OB
mg h
mg
√ h
l2 +h2
√
l2 + h2
mg h
Tab. 5.1.1: Riepilogo dei risultati per il problema della persona che sposta la valigia se si calcola
semplicemente il prodotto dell’intensità della forza applicata dalla persona per la distanza di cui si sposta
la valigia. Sono mostrati la forza applicata, lo spostamento del punto di applicazione e il prodotto delle
due grandezze per i diversi percorsi, con o senza uso del carrello.
La tabella 5.1.1 riassume i risultati: mentre negli esempi della leva e del paranco il prodotto
forza × spostamento equivaleva sempre al prodotto della forza peso per il dislivello di cui l’oggetto
veniva sollevato, vediamo che questo non avviene nel caso della valigia portata a mano. Invece se
si usa il carrello il risultato è quello aspettato. Il motivo sta nel fatto che il carrello compensa con
la sua reazione vincolare la componente di forza peso che è perpendicolare allo spostamento dell’oggetto, lasciando alla persona di applicare la componente nella direzione del moto: esso consente
di spostare la valigia senza sforzo in orizzontale, dà un aiuto parziale sul piano inclinato, mentre
non risulta assolutamente utile sulla scala, dove la persona deve applicare forza nella direzione
dello spostamento. Questo porta a pensare che nel calcolare il prodotto di forza e spostamento
occorra tenere conto anche delle rispettive direzioni; in particolare sembra che si debba considerare
solo la componente della forza nella direzione dello spostamento. Se consideriamo che la forza e
lo spostamento sono entità vettoriali, esiste un’operazione che produce proprio il risultato che ci
interessa, ossia il prodotto scalare. Proviamo a vedere cosa succede se invece che fare il prodotto
delle intensità dei due vettori, come abbiamo fatto finora, prendiamo il prodotto scalare F · s. I
risultati sono sintetizzati nella tabella 5.1.2.2
Utilizzando il prodotto scalare di forza per spostamento tutti i risultati sono coerenti fra loro
e corrispondono a quanto trovato nei casi di leva e paranco. Questi e molti altri esempi portano
2
Per il calcolo con il carrello sulla rampa si tiene conto del fatto che la forza ha intensità mg sin α ed è diretta come
5.1
140
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
a mano
con carrello
tratto
F
s
F·s
F
s
F·s
OA
mg j
li
0
0
li
0
AB
mg j
hj
mg h
mg j
hj
mg h
OA + AB
OB
mg h
mg j
li + hj
mg h
mg sin α (cos α i + sin α j)
mg h
li + hj
mg h
Tab. 5.1.2: Riepilogo dei risultati per il problema della persona che sposta la valigia. Considerando
la natura vettoriale di forza e spostamento e prendendo il prodotto scalare si ottiene lo stesso risultato
per qualsiasi modalità di spostamenti.
a pensare che una grandezza fisica costituita dal prodotto scalare di una forza per lo spostamento
del punto a cui è applicata possa avere una qualche utilità e quindi definiamo una tale grandezza
con il nome di lavoro meccanico, a cui associamo il simbolo L. Negli esempi che abbiamo fatto
la forza restava costante in modulo e in direzione mentre lo spostamento era sempre rettilineo: se
vogliamo dare una definizione di lavoro che sia valida in generale, anche quando una forza variabile
è applicata a un punto che si muove lungo una curva qualsiasi, occorre spezzare la traiettoria in
una successione di spostamenti infinitesimi dP, come visto in 2.5, e definire preventivamente il
lavoro infinitesimo di una forza applicata a un punto che compie uno spostamento infinitesimo
dL = F · dP
(5.1.3)
Possiamo poi definire il lavoro associato a una forza il cui punto di applicazione si muove da una
posizione iniziale P1 a una posizione finale P2 lungo una traiettoria Γ attraverso l’integrale
L=
�
P1 Γ P2
(5.1.4)
F · dP
La forza F in generale non sarà costante ma potrà dipendere, ad esempio, dalla posizione del
punto, dalla sua velocità e anche dal tempo (la forza potrebbe essere diversa a tempi diversi).
Pertanto per calcolare il lavoro si dovranno conoscere la traiettoria, la velocità del punto di applicazione ed eventualmente anche a che tempo il punto tocca le varie posizioni sulla traiettoria.
Tuttavia, nonostante queste difficoltà, vedremo che la grandezza fisica lavoro meccanico risulta
molto utile e in determinati casi può essere valutata in modo semplice.
L’unità di misura del lavoro è il joule, indicato dal simbolo J. Essendo il lavoro il prodotto di
una forza per uno spostamento, un joule è il lavoro prodotto da una forza di 1 N quando il suo
punto di applicazione si sposta di 1 m nella direzione della forza. L’equazione dimensionale per il
lavoro è
[L] = L2 · M · T−2
(5.1.5)
√
√
il piano inclinato, che ha versore cos α i + sin α j. Si ha poi sin α = h/ l2 + h2 e cos α = l/ l2 + h2 per cui
h
mg √
l2 + h2
�
l
√
l2 + h2
i+
h
√
l2 + h2
� �
�
h
j · l i + h j = mg √ 2
l + h2
141
�
l2 + h2
√
l2 + h2
�
= mg h
5.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
P2
P3
Γ
P1
Fig. 5.1.3: Calcolo del lavoro di una forza (in verde) applicata a un punto che si muove da P1 a
lungo la traiettoria Γ. La traiettoria viene suddivisa in una successione di spostamenti infinitesimi
(in figura sono indicati solo alcuni, in rosso, disegnati come finiti per ovvi motivi di visualizzazione); per
ciascun spostamento si deve considerare la forza esercitata nel momento in cui il punto d’applicazione
si trova in quella posizione sulla traiettoria e calcolare il prodotto scalare F · dP. Tutti i contributi
infinitesimi vengono sommati per ottenere il valore del lavoro.
P2
5.2 Teorema delle forze vive ed energia cinetica
Sia F la somma di tutte le forze applicate3 , istante per istante, a un punto materiale P di
massa m. Per il secondo principio della dinamica, F = m a. Ci ricordiamo anche del fatto che lo
spostamento infinitesimo del punto di applicazione si può scrivere in funzione della sua velocità e
del tempo infinitesimo in cui avviene, come nella (2.6.3): dP = v dt. Avremo
dL = F · dP = m a · v dt
(5.2.1)
Se consideriamo la derivata temporale del quadrato della velocità possiamo scrivere
d 2
d
v =
(v · v) = a · v + v · a = 2 a · v
dt
dt
⇒
m a · v dt =
1
m
2
�
d 2
v
dt
�
dt = d
�
1
m v2
2
�
(5.2.2)
Per il nostro punto materiale possiamo definire una nuova grandezza fisica, che chiamiamo energia
cinetica e indichiamo con il simbolo T
T =
1
m v2
2
per un punto materiale
(5.2.3)
L’energia cinetica di un punto materiale è quindi una quantità scalare definita, istante per istante,
come la metà del prodotto della sua massa per il quadrato della sua velocità. Possiamo riscrivere
la (5.2.1) in termini di energia cinetica e integrarla su un tratto di traiettoria finita
dL = dT
⇒
LP1 Γ P2 = TP2 − TP1 = ∆ T
(5.2.4)
La (5.2.4) costituisce il teorema delle forze vive, detto anche teorema dell’energia cinetica, per un
punto materiale: il lavoro fatto dalla somma di tutte le forze applicate a un punto materiale in uno
spostamento è uguale alla differenza fra l’energia cinetica finale e quella iniziale del punto stesso.
Dalla (5.2.4) si ricava anche che lavoro e energia cinetica hanno le stesse dimensioni e si misurano
entrambi in joule.
3
Si noti che nella definizione generale di lavoro il termine F non è necessariamente la somma delle forze applicate a
un punto materiale, ma può essere una qualunque fra le tante.
5.2
142
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Se passiamo da un punto materiale a un sistema di punti materiali Pi con masse mi , possiamo
considerare la somma dei lavori di tutte le forze applicate a tutti i punti del sistema. In un intervallo
di tempo infinitesimo dt avremo
dL =
�
i
mi ai · vi dt =
�
dTi
(5.2.5)
i
dove con Ti abbiamo indicato l’energia cinetica del punto i-mo. Se definiamo l’energia cinetica di
un sistema meccanico come la somma delle energie cinetiche di tutti i punti che lo compongono
T =
� 1
mi vi2
2
i
per un sistema meccanico
(5.2.6)
La (5.2.6) permette di scrivere la (5.2.4) anche per un sistema di punti materiali e cosı̀ abbiamo
il teorema dell’energia cinetica per un sistema meccanico: la somma dei lavori di tutte le forze
applicate a tutti i punti di un sistema meccanico che si muove da una configurazione iniziale a una
finale è uguale alla differenza fra l’energia cinetica del sistema nella configurazione finale e quella
nella configurazione iniziale.
5.3 Forze conservative
Abbiamo visto che nel caso più generale il lavoro di una forza su un tratto di traiettoria che
unisce un punto iniziale a uno finale può essere valutato solo se si conosce la traiettoria e in alcuni
casi occorre conoscere anche la velocità del punto di applicazione e il tempo di passaggio per ogni
tratto infinitesimo. Adesso vogliamo restringere il nostro campo d’interesse a un tipo particolare di
forze, dette posizionali: una forza posizionale dipende soltanto da dove si trova nello spazio il suo
punto d’applicazione, non dipende dalla sua velocità o dal tempo. Se F è posizionale F = F(x, y, z).
In questa sezione, da ora in poi, quando parleremo di forza penseremo a una forza posizionale.
Il lavoro di una forza posizionale quando il punto d’applicazione si sposta da un punto A a un
punto B richiede per essere calcolato la conoscenza della traiettoria. Chiameremo LA Γ B il lavoro
per andare da A a B lungo una traiettoria Γ. Se invertiamo il percorso, andando da B a A lungo
la stessa traiettoria, abbiamo
LB Γ A = −LA Γ B
(5.3.1)
Questo perché, calcolando il lavoro tramite l’integrale (5.1.4), tornando indietro sulla stessa traiettoria si ripercorrono i medesimi spostamenti, passando per gli stessi punti, e quindi ritrovando gli
stessi valori della forza, ma il verso degli spostamenti è invertito rispetto a prima.
Fra tutte le forze posizionali esistono forze che chiameremo conservative, per le quali il lavoro
quando il punto di applicazione si sposta da A a B dipende dalle coordinate dei due punti, ma
non dalla particolare traiettoria seguita. Più precisamente, una forza posizionale è conservativa se
si può dimostrare che soddisfa una delle quattro proprietà che seguono:
I Il lavoro di una forza conservativa lungo una qualsiasi traiettoria chiusa è nullo. In formule la
proprietà è scritta4
�
I
F · dP = 0
∀Γ
(5.3.2)
Γ
4
Il simbolo
�
indica un integrale ciclico, ossia, appunto un integrale lungo un percorso chiuso.
143
5.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
II Il lavoro di una forza conservativa dipende solo dalla posizione dei punti iniziale e finale dello
spostamento ma non dalla traiettoria; quindi il lavoro per andare da uno stesso punto A a uno
stesso punto B attraverso due traiettorie diverse è lo stesso qualsiasi siano le traiettorie.
�
II
A Γ1 B
F · dP =
�
A Γ2 B
F · dP
∀ Γ1 , Γ2
(5.3.3)
III Il lavoro per uno spostamento da un punto A a un punto B (che per una forza conservativa
potremo chiamare semplicemente LAB dato che non dipende dalla traiettoria) si può esprimere
come differenza dei valori di una funzione scalare V (x, y, z) fra la posizione iniziale e quella
finale. La funzione V è detta energia potenziale associata alla forza conservativa F.
III
LAB = V (xA , yA , zA ) − V (xB , yB , zB )
(5.3.4)
IV Le tre componenti di una forza conservativa sono date in ciascun punto dalle derivate parziali
di una funzione scalare, l’energia potenziale, rispetto alla variabile corrispondente, cambiate di
segno.
IV
F=−
∂V
∂V
∂V
i−
j−
k
∂x
∂y
∂z
(5.3.5)
Le derivate sono calcolate nel punto in cui vogliamo determinare la forza. La situazione in cui
una quantità vettoriale funzione del posto ha le componenti date dalle derivate parziali di una
quantità scalare è abbastanza comune in fisica (e in matematica), cosı̀ che viene definito un
operatore apposito, detto gradiente, che opera su una quantità scalare s, funzione del posto, per
produrre il valore nel punto considerato di una quantità vettoriale w:
grad s =
∂s
∂s
∂s
i+
j+
k=w
∂x
∂y
∂z
wx =
wy =
wz =
⇒
∂s
∂x
∂s
∂y
(5.3.6)
∂s
∂z
In termini di gradiente la (5.3.5) diventa
IV
F = −grad V
(5.3.7)
Vogliamo dimostrare che le quattro proprietà sono fra loro equivalenti, ossia che se una forza
posizionale soddisfa una di esse, soddisfa automaticamente anche le altre tre. Usando il simbolo ⇔
per la doppia implicazione, possiamo dire che per dimostrare l’equivalenza delle quattro proprietà
basta dimostrare che I ⇔ II, II ⇔ III, III ⇔ IV. Vediamo le dimostrazioni.
I ⇒ II: Si considerino due traiettorie qualunque, Γ1 e Γ2 , che collegano gli stessi punti A e B (vedi
fig. 5.1.4). Calcoliamo il lavoro totale per andare da A a B via Γ1 e tornare ad A via Γ2 ; dato che
il percorso totale è una traiettoria chiusa, per la I deve essere nullo
LA Γ1 B Γ2 A = LA Γ1 B + LB Γ2 A = 0
5.3
144
⇒
LA Γ1 B = LA Γ2 B
(5.3.8)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
dove si è sfruttata la proprietà (5.3.1).
II ⇒ I: Consideriamo una qualsiasi traiettoria chiusa Γ e chiamiamo LΓ il lavoro associato. Se
prendiamo arbitrariamente su essa due punti A e B distinti avremo
LΓ = LA Γ1 B Γ2 A = LA Γ1 B − LA Γ2 B = 0
(5.3.9)
II ⇒ III: Scegliamo arbitrariamente un punto C e calcoliamo il lavoro per andare da C ad A lungo
una traiettoria qualsiasi. Per la II il risultato non dipenderà dalla traiettoria e quindi, dato che C
è fissato, dipenderà solo dalle coordinate di A. Questo vale per qualsiasi altro punto5 e quindi in
ogni punto P = (x, y, z) possiamo definire una funzione scalare V (x, y, z) in base al lavoro fatto
dalla forza per andare da C a P
V (x, y, z) = −LCP
(5.3.10)
Per dimostrare l’asserto III consideriamo un percorso chiuso CABC
0 = LCA + LAB + LBC
a)
⇒
LAB = LCB − LCA = V (xA , yA , zA ) − V (xB , yB , zB )
B
Γ1
b)
(5.3.11)
A
B
Γ2
A
C
Fig. 5.1.4: Proprietà delle forze conservative. a) Traiettorie usate per dimostrare che I ⇔ II. b)
Percorso per dimostrare che II ⇒ III.
III ⇒ II: Se vale la proprietà III il lavoro per andare da un punto a un altro dipende solo dalle
coordinate dei due punti, e quindi è lo stesso per ogni traiettoria.
III ⇒ IV: Consideriamo uno spostamento infinitesimo dP = dx i+dy j+dz k a partire dal punto P
il cui vettore posizione è (P − O) = x i + y j + z k. Il lavoro associato allo spostamento infinitesimo
vale
dL = F · dP = (Fx i + Fy j + Fz k) · (dx i + dy j + dz k) = Fx dx + Fy dy + Fz dz
(5.3.12)
Se vale la III però deve essere
dL = V (x, y, z) − V (x + dx, y + dy, z + dz) = −
5
∂V
∂V
∂V
dx −
dy −
dz
∂x
∂y
∂z
(5.3.13)
In questa dimostrazione supponiamo che da C si possano raggiungere tutti i punti dello spazio, cosa che non
costituisce una limitazione essenziale almeno per i casi che studieremo.
145
5.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Le due espressioni trovate devono coincidere qualsiasi siano i valori (infinitesimi) di dx, dy, dz.
Se dy = dz = 0 questo implica Fx = −∂V /∂x e analogamente si prova che Fy = −∂V /∂y,
Fz = −∂V /∂z, dimostrando che vale la IV.
IV ⇒ III: Calcoliamo il lavoro per andare da un punto A a un punto B secondo una traiettoria
qualunque, tenendo conto della IV
LAB =
�
AΓB
=−
�
AB
F · dP = −
�
AΓB
�
∂V
∂V
∂V
dx +
dy +
dz
∂x
∂y
∂z
�
=
(5.3.14)
dV = V (xA , yA , zA ) − V (xB , yB , zB )
Sulle forze conservative possiamo fare le seguenti osservazioni
– Il fatto che una forza sia conservativa permette tramite la (5.3.7) di calcolare in ogni punto il
valore di una quantità vettoriale, la forza, a partire da una quantità scalare, l’energia potenziale.
– Nella definizione di energia potenziale data con la (5.3.10) la scelta del punto di riferimento
C è arbitraria. Essendo V (xC , yC , zC ) = LCC = 0 l’energia potenziale risulta nulla in C. Se
scegliamo come riferimento un punto diverso C� e chiamiamo V� l’energia potenziale determinata
a partire da questo avremo
V � (x, y, z) = −LC� P = −LC� C − LCP = V (x, y, z) − LC� C
(5.3.15)
Ossia, le due energie potenziali in ogni punto differiscono per il lavoro LC� C , una quantità
costante. Dato che questa sparisce calcolando le derivate della (5.3.5), entrambe le energie
potenziali producono come risultato la stessa forza e quindi sono equivalenti a tutti gli effetti
pratici. In pratica, il valore dell’energia potenziale nei singoli punti non ha significato fisico,
mentre lo hanno le differenze di energia da un punto all’altro.
L’energia potenziale ha le stesse dimensioni del lavoro e dell’energia cinetica e si misura anch’essa
in joule.
5.4 Conservazione dell’energia meccanica
Consideriamo un sistema meccanico in cui tutte le forze che fanno lavoro sono conservative. Se
calcoliamo la somma dei lavori di tutte le forze applicate al sistema quando questo passa da una
configurazione 1 a una configurazione 2 avremo
L=
�
i
Vi (1) − Vi (2) = −∆V
Dove le Vi sono le energie potenziali delle varie forze applicate e V =
la (5.2.4) abbiamo che nel passaggio da una configurazione all’altra
∆T = −∆V
⇒
∆T + ∆V = 0
⇒
(5.4.1)
�
i
Vi . Se confrontiamo con
T + V = costante
(5.4.2)
Chiamiamo la quantità T + V energia meccanica del sistema e abbiamo la cosiddetta conservazione
dell’energia meccanica, ossia il fatto che se in un sistema tutte le forze che fanno lavoro sono
5.4
146
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
conservative l’energia meccanica, ossia la somma dell’energia cinetica e dell’energia potenziale, si
mantiene costante.
Sulla conservazione dell’energia meccanica si possono e si devono fare diverse considerazioni:
come prima cosa rileviamo che tutti i concetti sviluppati nel presente capitolo sono pure deduzioni
basate sui principi della dinamica e non derivano da uno studio sperimentale ulteriore. Se si vuole,
l’unico aspetto sperimentale della conservazione dell’energia meccanica consiste nel fatto che in
natura esistono effettivamente forze conservative. Questo comunque non sminuisce l’importanza
della conservazione dell’energia meccanica, sia perché fornisce, spesso con minor sforzo di quello
richiesto per l’applicazione di F = m a o delle equazioni cardinali, un’equazione di moto che
contiene le velocità e non le accelerazioni, e quindi del primo ordine anziché del secondo, sia
soprattutto perché, come già accennato parlando di quantità di moto e momento angolare, la
conservazione di una grandezza fisica nel moto consente in molti casi un approccio mentale più
congeniale ai problemi, la possibilità di trarre risultati qualitativi generali anche senza addentrarsi
in tutti i particolari dei calcoli, e il fatto di poter ricavare informazione sullo stato finale di un
sistema, a partire da uno stato iniziale, senza doverne seguire l’evoluzione in ogni istante intermedio.
Per contro va considerato che la conservazione dell’energia fornisce una sola equazione scalare per
l’intero sistema meccanico, per cui potrà essere sufficiente a determinare il moto solo nel caso di
un unico grado di libertà.
Un’altra considerazione da fare è che la conservazione dell’energia meccanica non si presenta
praticamente mai in modo rigoroso negli esperimenti di laboratorio e nei fenomeni della vita di
tutti i giorni. Questo a causa delle forze d’attrito che sono sostanzialmente sempre presenti. Le
forze d’attrito, come quelle espresse dalla (3.7.3) e (3.7.4), sono dirette in senso opposto alla
velocità del punto d’applicazione. Per questo avremo, in ogni intervallo di tempo infinitesimo,
dL = F · v dt < 0. Questo implica che il lavoro delle forze d’attrito sia negativo su qualsiasi
traiettoria, aperta o chiusa. Se abbiamo un sistema meccanico dove agiscono forze conservative e
di attrito, indicando con Lcons e Lattr i rispettivi lavori, abbiamo
Lcons + Lattr = ∆T
⇒
∆T + ∆V = Lattr < 0
(5.4.3)
L’energia meccanica quindi decresce durante il moto: salvo il caso in cui l’energia potenziale del
sistema può decrescere indefinitamente, questa avrà un valore minimo sotto il quale non può
andare e quindi la perdita di energia avverrà a carico dell’energia cinetica, finché essa raggiungerà
lo zero e il sistema si fermerà; infatti se T = 0 per la (5.2.6) tutti i punti materiali del sistema
hanno velocità nulla. Questo è il motivo per cui i moti tendono in generale a smorzarsi e cessare,
fatto che, come già notato, ha impedito per molti secoli la comprensione delle leggi del moto.
Dalla (5.4.3) si vede che in presenza di attrito la quantità che “si consuma” nel moto è l’energia
meccanica. L’esperienza quotidiana ci mostra che quando si ha attrito i corpi che interagiscono
tendono a scaldarsi;6 il primo principio della termodinamica stabilisce che l’energia meccanica
perduta va ad aumentare nella stessa quantità l’energia interna dei corpi interagenti. In questo
modo si passa dalla conservazione dell’energia meccanica che, come abbiamo visto, ha i suoi limiti
di validità alla conservazione dell’energia tout–court, un principio assolutamente generale che vale
in tutti i campi della fisica. Fino ad oggi, quando in un fenomeno si è misurata una variazione di
energia, è sempre stato possibile verificare che o vi è stato un trasferimento fra il sistema studiato
e l’ambiente esterno, sotto forma di apporto o sottrazione, o dell’energia è stata immagazzinata
o rilasciata nel sistema in/da una forma che prima non era stata conosciuta/considerata. Ad
esempio, in elettrologia si osserva che determinati dispositivi, come induttanze e condensatori,
possono immagazzinare e rilasciare energia, e che le onde elettromagnetiche trasportano energia
da un punto all’altro dello spazio.
6
A questo punto non abbiamo una definizione fisicamente rigorosa della temperatura e ci appelliamo alla percezione
che di questo concetto si ha nella vita comune.
147
5.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Tornando all’energia interna della termodinamica, in modo molto qualitativo e poco rigoroso
possiamo dire che il fenomeno di “riscaldamento” corrisponde a un aumento del moto di agitazione
delle componenti microscopiche (molecole, atomi, e loro elementi) che compongono gli oggetti
interagenti, alle quali potremmo ancora associare un’energia cinetica, ma questi moti, in generale
scorrelati, non producono spostamenti apprezzabili del sistema e non incidono sull’energia cinetica
macroscopicamente misurabile.
5.5 Energia potenziale
Vogliamo vedere adesso come si dimostra che una forza è conservativa e si determina l’espressione
dell’energia potenziale corrispondente, introducendo alcune forze conservative con le loro proprietà.
Il procedimento per determinare se una forza è conservativa e ricavare l’espressione dell’energia
potenziale può essere suddiviso nei passi seguenti:
a. Data la forza posizionale da studiare, si calcola il lavoro quando il punto di applicazione si
sposta da un punto A a un punto B generici secondo una traiettoria scelta arbitrariamente. È
conveniente scegliere una traiettoria che renda il calcolo più semplice.
b. Si verifica che il lavoro può essere scritto come la differenza fra il valore di una stessa funzione della posizione nel punto iniziale e finale della traiettoria, e se ne deduce una probabile
energia potenziale (a questo punto l’espressione trovata non può essere considerata sicuramente
un’energia potenziale valida, perché risulta da un calcolo del lavoro su un’unica traiettoria).
c. Si verifica che l’espressione ipotizzata per l’energia potenziale è quella effettiva, attraverso la
proprietà IV, ossia calcolandone il gradiente e controllando che corrisponda, col segno cambiato,
in ogni punto al valore della forza.
5.5.1 Energia potenziale della forza peso
Vogliamo dimostrare che la forza peso è conservativa e calcolarne l’energia potenziale. Consideriamo inizialmente un solo punto di massa m in un sistema di riferimento in cui gli assi X e Y
sono in un piano orizzontale e l’asse Z corrisponde alla verticale ascendente. In questo sistema
la forza peso del punto si scrive come F = −mg k. Calcoliamo il lavoro per andare da un punto
A ≡ (xA , yA , zA ) a un punto B ≡ (xB , yB , zB ). In questo caso possiamo scegliere una traiettoria
generica
�
� zB
LA Γ B =
(Fx dx + Fy dy + Fz dz) = −mg
dz = mg zA − mg zB
(5.5.1)
Γ
zA
L’espressione suggerisce di prendere come energia potenziale mg z. Si verifica che
−grad (mg z) = −
∂(mg z)
∂(mg z)
∂(mg z)
i−
j−
k = −mg k
∂x
∂y
∂z
(5.5.2)
Quindi la forza peso è conservativa e ha come energia potenziale mg z. Si vede che con questa
espressione prendiamo il piano degli assi XY come riferimento a cui corrisponde energia nulla. Se
avessimo usato un riferimento con l’origine a una quota diversa sulla verticale, avremmo ottenuto
un’energia potenziale diversa in ogni punto per una costante pari alla differenza di quota delle due
origini. Tuttavia questo, come spiegato, non cambia il valore della forza che si ricava. In questo caso
è stato elementare effettuare il calcolo del lavoro su una traiettoria generica, ma avremmo potuto
rendere il procedimento ancor più intuitivamente evidente scegliendo ad esempio una traiettoria
in cui si va prima dal punto A a un punto di coordinate P1 = (xB , yB , zA ) muovendosi in un
5.5.1
148
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
piano orizzontale e quindi si raggiunge B con uno spostamento parallelo all’asse Z. In questo
modo si vede che nello spostamento da A a P1 il lavoro è nullo, dato che lo spostamento, qualsiasi
traiettoria si scelga, è perpendicolare alla forza, mentre solo l’ultimo tratto da P1 a B, percorso in
verticale, contribuisce al lavoro.
Se abbiamo un sistema di più punti materiali e l’asse Z del riferimento diretto come la verticale
ascendente, possiamo scrivere l’energia potenziale complessiva delle forze peso come
V =
�
Vi =
i
�
mi g zi = M g zG
(5.5.3)
i
dove l’ultimo passaggio deriva dalla definizione di centro di massa. Si vede quindi che l’energia
potenziale delle forze peso si può calcolare come se tutta la massa del sistema fosse concentrata
nel centro di massa. Questa proprietà completa quelle già dimostrate per la risultante delle forze
peso (che è abbastanza ovvia) e per il momento risultante.
Infine notiamo che l’energia potenziale della forza peso si esprime in base all’altezza di ciascun
punto materiale rispetto a una qualsiasi quota di riferimento che rimanga costante, per cui è lecito
scegliere quella che rende l’espressione più semplice. Cambiare la quota di riferimento corrisponde
ad aggiungere o togliere all’espressione dell’energia potenziale un termine costante, privo quindi
di significato fisico. Addirittura sarebbe lecito scrivere l’energia potenziale della forza peso per
un sistema utilizzando quote di riferimento diverse per parti diverse di esso, a patto che ciascuna
quota rimanga costante.
5.5.2 Energia potenziale elastica
Una molla reagisce con una forza di richiamo proporzionale in intensità alla distanza per cui è
stata estesa e diretta lungo la linea che congiunge i suoi estremi. Consideriamo una molla avente
un estremo fisso nell’origine del nostro sistema di riferimento e calcoliamo il lavoro quando l’altro
estremo si sposta da un punto A a un punto B. Per semplicità supponiamo che la lunghezza di
riposo della molla sia nulla. Se O è l’origine e P la posizione generica dell’estremo mobile della
molla avremo
Fel = −k (P − O) = −k(x i + y j + z k)
(5.5.4)
Possiamo calcolare il lavoro secondo una traiettoria costruita con tre tratti rettilinei (vedi
fig. 5.5.1a): un tratto da A a P1 = (xB , yA , zA ), parallelo all’asse X in questo tratto
LA Γ1 P1 = −k
�
xB
x dx =
xA
1
1
k x2A − k x2B
2
2
(5.5.5)
Andiamo poi da P1 a un punto P2 = (xB , yB , zA ) muovendoci lungo l’asse Y e troviamo corri2
2
spondentemente LP1 Γ2 P2 = (1/2) k (yA
− yB
). Andiamo infine da P2 a B muovendoci lungo l’asse
2
2
Z e trovando LP2 Γ3 B = (1/2) k (zA
− zB
). Sommando i tre lavori abbiamo il lavoro totale, la cui
espressione porta a postulare per l’energia potenziale
1
Vel = k (x2 + y 2 + z 2 )
2
(5.5.6)
È immediato vedere che il gradiente cambiato di segno della (5.5.6) produce la forza data dalla
149
5.5.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
a)
b)
zB
zB
B
B
zA
P1
zA
P2
A
A
yA
O
xA
P3
yB
O
xB
xA
yA
yB
xB
Fig. 5.5.1: Percorsi per calcolare il lavoro di una forza elastica. In a) si percorre prima un tratto
rettilineo lungo l’asse X, poi uno lungo l’asse Y e poi lungo l’asse Z. In b) si percorre prima un tratto
sulla superficie sferica centrata nell’origine e con raggio OA e poi un tratto lungo il raggio che va da O
a B.
(5.5.4), per cui concludiamo che l’espressione (5.5.6) rappresenta effettivamente l’energia potenziale
elastica.
Possiamo anche scrivere la forza direttamente in funzione del vettore r = x i + y j + z k = r ur .
Corrispondentemente l’espressione in parentesi nella (5.5.6) è la distanza al quadrato del punto
considerato dall’origine. Avremo
Fel = −k r ur
1
Vel = k r2
2
(5.5.7)
In base a questa considerazione possiamo trovare un altro tipo di traiettoria conveniente per calcolare il lavoro da A a B: si percorre prima un tratto sulla superficie sferica di centro O e raggio rA ,
fino a raggiungere un punto P3 che si trova sul raggio congiungente OB a distanza rA dall’origine.
In questo percorso la forza, radiale, è sempre perpendicolare agli spostamenti infinitesimi e quindi
il lavoro è nullo. Raggiungiamo poi B muovendoci lungo il raggio che lo connette all’origine. Uno
spostamento infinitesimo lungo il raggio è rappresentato come dP = dr ur ; conseguentemente
LP3 Γ B =
�
Γ
−k r ur · dr ur = −
�
rB
k r dr =
rA
1
2
2
k (rA
− rB
)
2
⇒ Vel =
1 2
kr
2
(5.5.8)
In generale si può dimostrare che a una molla di costante k e lunghezza di riposo l0 corrisponde
un’energia potenziale Vel = (1/2) k (l − l0 )2 , dove l è la lunghezza a cui si trova estesa la molla.
5.5.3 Energia potenziale di un’interazione
Nella presentazione delle forze conservative e negli esempi dati sopra ci siamo sempre riferiti
a una forza applicata a un punto materiale e dipendente solo dalla posizione del medesimo. Il
terzo principio comporta tuttavia che le forze si manifestino come conseguenza di una interazione
fra corpi e per ogni interazione avremo due forze applicate a due punti materiali diversi, dirette
5.5.3
150
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
secondo la congiungente i punti e con verso opposto. Non per questo sono errate o non–fisiche
le energie potenziali della forza peso e di una molla ricavate appena sopra: nel caso della forza
peso l’interazione avviene fra un corpo e il pianeta Terra, nel caso della molla l’estremo fisso sarà
solidale con un sostegno a sua volta solidale con la struttura del laboratorio e, via dicendo, alla
fine ancora con la Terra. Nell’interazione corpo–Terra all’oggetto e al pianeta sono applicate forze
di uguale intensità e per il secondo principio le accelerazioni che ne derivano sono inversamente
proporzionali alle masse. Data la sproporzione fra la massa della Terra e quella dell’oggetto, il
movimento indotto del pianeta è del tutto trascurabile, per cui possiamo considerare fisso il punto
di applicazione della reazione alla forza che stiamo considerando sull’oggetto in studio.
Il caso è diverso se consideriamo una forza che agisce fra due oggetti di masse paragonabili,
come ad esempio una molla con le estremità attaccate a due punti materiali P1 e P2 , ciascuno
dotato di almeno un grado di libertà di movimento. In questo caso l’interazione provocherà in
generale uno spostamento di entrambi i punti materiali. Se studiassimo soltanto la forza F1
applicata a P1 , essa non risulterebbe neppure posizionale, in quanto varierebbe in intensità e
direzione anche con P1 fisso, al muoversi di P2 . Non avrebbe quindi senso studiare (da un punto
di vista energetico, ma anche in generale) quello che succede a uno solo dei due punti: dobbiamo
studiare contemporaneamente i due punti interagenti ed estendere il concetto di conservatività al
loro insieme. Le forze F1 e F2 saranno considerate posizionali se dipendenti solo dalle coordinate
di entrambi i punti
F2 = −F1 = F(x1 , y1 , z1 , x2 , y2 , z2 )
(5.5.9)
Possiamo ancora parlare di traiettorie del sistema, ma queste saranno costituite da una linea per
il punto 1 e una linea per il punto 2. Diremo che l’interazione è conservativa se
L{A1 ,A2 } Γ {B1 ,B2 } = V (x1A , y1A , z1A , x2A , y2A , z2A ) − V (x1B , y1B , z1B , x2B , y2B , z2B )
(5.5.10)
L’energia potenziale dovrà quindi dipendere dalle coordinate di entrambi i punti. Introdurremo
poi i gradienti rispetto alle coordinate del primo e del secondo punto
grad1 V =
∂V
∂V
∂V
i+
j+
k
∂x1
∂y1
∂z1
grad2 V =
∂V
∂V
∂V
i+
j+
k
∂x2
∂y2
∂z2
(5.5.11)
grad2 V = −grad1 V
(5.5.12)
E potremo ricavare le forze sui due punti
�
F1 = −grad1 V
F2 = −grad2 V
dove necessariamente
Con questa espansione dei concetti si possono definire ancora le quattro proprietà enunciate in 5.3
e dimostrarne l’equivalenza, arrivando a definire l’energia potenziale in un’interazione.
Vogliamo fare un esempio di questa situazione rivisitando l’energia potenziale elastica trattata
in 5.5.2. Se considereremo la molla applicata a due punti materiali, la forza elastica sarà data da
F1 = k (P2 − P1 )
F2 = k (P1 − P2 )
(5.5.13)
dato che le forze applicate ai due punti sono proporzionali alla distanza fra essi, dirette come il
segmento che li congiunge e attrattive. Possiamo ipotizzare che l’energia potenziale abbia una
151
5.5.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
forma analoga alla (5.5.8) ma dipenda dalla distanza D fra i punti
1
Vel = k D2
2
D=
�
(x1 − x2 )2 + (y1 − y2 )2 + (z1 − z2 )2
(5.5.14)
e verificare che i gradienti di essa riproducano le forze (5.5.13), ricordando che (P1 − P2 ) =
(x1 − x2 ) i + (y1 − y2 ) j + (z1 − z2 ) k. Avremo
−
el = − ∂ � 1 k �(x1 − x2 )2 + (y1 − y2 )2 + (z1 − z2 )2 �� = k (x2 − x1 )
∂x1
2
∂V
∂x1
�1 �
��
∂
2
2
2
− ∂xel
= − ∂x
= k (x1 − x2 )
2 k (x1 − x2 ) + (y1 − y2 ) + (z1 − z2 )
2
2
∂V
(5.5.15)
e analogamente per le altre due coordinate, per cui l’assunto risulta provato. Ovviamente, se uno
dei due punti è vincolato a rimanere fermo, l’energia potenziale (5.5.14) coincide con la (5.5.8).
È perfettamente lecito ipotizzare direttamente l’espressione dell’energia potenziale, come abbiamo fatto qui sopra, a patto di dimostrarne la validità. A titolo di esempio vogliamo comunque far
vedere come si può impostare il calcolo del lavoro nel caso della molla operante fra due punti liberi.
z
B2
P2
P1
B1
O
A1
A2
y
x
Fig. 5.5.2: Traiettorie per il calcolo del lavoro complessivo delle forze esercitate da una molla quando i suoi
estremi si spostano dalle posizioni iniziali A1 , A2 alle posizioni finali B1 , B2 .
Dobbiamo determinare il lavoro complessivo delle forze agenti agli estremi della molla quando
essi si spostano dalle posizioni iniziali A1 , A2 alle posizioni finali B1 , B2 (vedi fig. 5.5.2). Per
effettuare il calcolo nel modo più semplice spostiamo prima i due estremi della molla con una
traslazione pura che porti il primo estremo da A1 a B1 , mentre l’altro estremo andrà in P1 . In
questo tratto, essendo il moto una traslazione, gli spostamenti infinitesimi sono uguali: dP2 =
dP1 mentre le forze sono opposte per il terzo principio: ne risulta ovviamente un lavoro nullo.
Nel secondo tratto manteniamo il primo punto, che ha già raggiunto la posizione finale, fermo e
spostiamo il secondo punto mantenendo costante la sua distanza dal primo, fino a portarlo nella
posizione P2 , sulla congiungente B1 B2 . In questo tratto il primo punto è fermo, e la forza applicata
non compie lavoro, mentre il secondo si muove su una superficie sferica centrata nella posizione del
primo, per la forza applicata radialmente e gli spostamenti infinitesimi sono ortogonali, e il lavoro è
nullo. Infine, mantenendo fermo il primo punto, si sposta il secondo lungo la congiungente B1 B2 ,
fino a raggiungere la posizione finale. In questo caso la forza applicata al secondo punto fa un
5.5.3
152
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
lavoro che si può calcolare in modo perfettamente analogo a quanto fatto per la (5.5.8) ottenendo
per l’energia potenziale l’espressione (5.5.14).
Infine
� vogliamo notare che un’energia potenziale d’interazione che sia funzione della distanza
D = (x2 − x1 )2 + (y2 − y1 )2 + (z2 − z1 )2 fra i punti interagenti avrà i gradienti rispetto alle
coordinate dei due punti uguali in modulo, opposti in verso e diretti lungo la congiungente. Infatti
se V = f (D), ricordando la regola di derivazione della radice quadrata, si ha
df (D)
dD
df (D)
=
dD
df (D)
=
dD
df (D)
grad2 V =
dD
grad1 V =
�
�
∂D
∂D
∂D
i+
j+
k =
∂x1
∂y1
∂z1
1
[(x1 − x2 ) i + (y1 − y2 ) j + (z1 − z2 ) k] =
D
1
(P1 − P2 )
D
�
�
∂D
∂D
∂D
df (D) 1
i+
j+
k =
(P2 − P1 )
∂x2
∂y2
∂z2
dD D
(5.5.16)
5.6 Lavoro e forze vincolari
In 3.6 abbiamo dato una definizione empirica di vincolo ideale come vincolo che impone delle
limitazioni cinematiche al moto senza influenzare i moti permessi. Da un punto di vista energetico,
possiamo osservare che i vincoli ideali in forma di guida esercitano reazioni vincolari perpendicolari
alla direzione di moto permessa, per cui le reazioni fanno lavoro nullo. Le reazioni su un corpo
rigido imperniato su un asse fisso hanno rette d’azione passanti per l’asse e quindi non compiono
lavoro, perché lo spostamento dei punti d’applicazione è perpendicolare alle forze.
Possiamo anche notare che se una forza compie lavoro questo si traduce in una variazione di
energia cinetica del sistema a cui è applicata e quindi la forza influenza il moto del medesimo.
Queste considerazioni ci portano a una definizione più generale e rigorosa di vincoli ideali: un
vincolo è ideale se le forze da esso esercitate compiono complessivamente lavoro nullo per ogni
sistema di spostamenti permessi. Abbiamo sottolineato la parola complessivamente perché un
vincolo, quando opera fra due parti mobili di un sistema, può trasferire energia da una parte
all’altra e quindi ciascuna delle due forze esercitate sulle due parti può compiere lavoro, ma deve
essere nullo il lavoro complessivo delle due forze.
Per comprendere meglio questa situazione consideriamo un blocco a forma di triangolo rettangolo
con un cateto che poggia su una guida orizzontale fissa senza attrito (vedi fig. 5.6.1).
La superficie superiore del blocco risulta inclinata di un angolo α rispetto all’orizzontale e su di
essa può scorrere senza attrito un ulteriore blocco. Siamo interessati a studiare le reazioni vincolari
che si hanno fra i due blocchi. La faccia superiore del blocco triangolare funziona da guida e quindi
possiamo pensare che la reazione vincolare esercitata sul blocco appoggiato sia perpendicolare alla
superficie di scorrimento. Se fissiamo un sistema di riferimento con l’asse X orizzontale e l’asse Y
verticale possiamo scrivere la reazione esercitata sul blocco superiore7
N = N (sin α i + cos α j)
7
(5.6.1)
Più precisamente, la reazione fra i due blocchi sarà distribuita lungo la superficie di contatto, ma possiamo considerarne la risultante: dato che gli oggetti traslano e quindi tutti i loro punti hanno la stessa velocità, considerare la
forza vincolare applicata in un solo punto non altera i risultati per quanto concerne il lavoro.
153
5.6
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
y
N
B
O
A
N
P2
P1
w
α
C
x
Fig. 5.6.1: Il blocco triangolare ABC può scorrere senza attrito su una guida orizzontale. Su di esso può
scorrere senza attrito un ulteriore blocco. Gli oggetti sono disegnati lievemente scostati fra loro per evidenziare
quale forza vincolare è applicata a ciascuno.
Per il terzo principio al blocco inferiore sarà applicata una reazione −N.
Vogliamo calcolare il lavoro delle due forze per un qualsiasi spostamento permesso dai vincoli
e per questo dobbiamo analizzare la cinematica del sistema. Il blocco inclinato può solo scorrere
lungo la guida orizzontale e se x è l’ascissa del punto A ogni punto del blocco, compreso il punto
P1 a cui è applicata la reazione vincolare −N, ha uguale velocità ẋ i. Per indicare la posizione
del blocco superiore rispetto a quello inclinato usiamo un asse W direzionato come la superficie
inclinata, con l’origine in B e chiamiamo w la coordinata lungo l’asse del punto di applicazione
P2 della reazione vincolare. È da notare che i punti P1 e P2 sono all’istante geometricamente
coincidenti, ma hanno velocità diverse, dato che il blocco superiore può scorrere su quello inferiore.
Se AB = h possiamo scrivere il vettore posizione di P2 e la sua velocità nel sistema di coordinate
fisso come
(P2 − O) = (x + w cos α) i + (h − w sin α) j
⇒
vP2 = (ẋ + ẇ cos α) i − ẇ sin α j
(5.6.2)
Calcoliamo il lavoro della reazione applicata in ciascuno dei due punti per uno spostamento
infinitesimo qualunque
dLP1 = −N · vP1 dt = −N (sin α i + cos α j) · ẋ i dt = −N sin α ẋ dt
dLP2 = N · vP2 dt = N (sin α i + cos α j) · [(ẋ + ẇ cos α) i − ẇ sin α j] dt = N sin α ẋ dt
(5.6.3)
Vediamo quindi che la reazione vincolare compie lavori di segno opposto sui due blocchi, per cui il
lavoro complessivo sul sistema è nullo. Similmente possiamo considerare il vincolo di rotolamento
puro fra due corpi, in cui in un determinato istante si trovano in contatto un punto P1 del primo
corpo e un punto P2 del secondo corpo. Fra i due punti si esercita una forza vincolare che ha
in generale componenti sia tangenti che perpendicolari alle superfici in contatto. Se F è la forza
vincolare applicata da P2 a P1 avremo per il lavoro totale del vincolo durante intervallo infinitesimo
del contatto, tenendo conto del terzo principio, dL = (F · vP1 − F · vP2 ) dt. La condizione di
rotolamento puro impone che sia nell’istante di contatto vP1 = vP2 e quindi il lavoro risulta nullo.
Come ulteriore esempio possiamo considerare le reazioni vincolari che mantengono costanti le
distanze di tutti i punti di un corpo rigido. Per ciascuna coppia di punti P1 e P2 del corpo rigido
che interagiscono fra loro si sviluppano due forze F1 e F2 in relazione fra loro come dettato dal
terzo principio. Il lavoro complessivo per uno spostamento infinitesimo risulta
dL = [F1 · vP1 + F2 · vP2 ] dt = F1 · (vP1 − vP2 ) dt = 0
5.6
154
(5.6.4)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Il lavoro risulta nullo perché la forza è diretta come (P1 − P2 ) e quindi per la (2.11.2) è perpendicolare alla differenza delle velocità. Quindi i vincoli che “tengono insieme” un corpo rigido sono
ideali.
Occorre in ogni caso prestare attenzione a due categorie di vincoli per cui la situazione è più
complessa:
a. I vincoli unilateri, visti in 3.6.1. Se sono ideali non fanno lavoro finché sono in grado di agire,
ma nel momento in cui dovrebbero fornire una forza nel verso a loro non consentito cessano
totalmente di esercitare forze. Essi quindi sono ancora vincoli che non fanno complessivamente
lavoro, ma occorre tener presente che quando cessano di agire cambia la condizione cinematica
del sistema.
b. Esistono vincoli che dipendono esplicitamente dal tempo. Consideriamo ad esempio un pendolo
semplice in cui la funicella di sospensione sia collegata a un meccanismo che possa variare durante
il moto la lunghezza del pendolo, come in fig. 5.6.2. In questo caso la reazione N applicata dalla
funicella al punto materiale compie lavoro durante il moto, quando la lunghezza del pendolo
aumenta o diminuisce. Un vincolo di questo tipo viene ancora classificato come ideale, in quanto
si dice che non compie lavoro per qualunque spostamento virtuale, dove per virtuale si intende
uno spostamento infinitesimo permesso dai vincoli nella configurazione istantanea. In modo
lievemente pittoresco, potremmo pensare a un “diavoletto” che fermasse il tempo, bloccando
cosı̀ il meccanismo che altera la lunghezza del pendolo, e che quindi analizzasse gli spostamenti
permessi dal vincolo al punto materiale a tempo fermo. Questo tipo di ragionamenti portano
a enunciare quello che viene chiamato principio dei lavori virtuali, che però non tratteremo
nel corso. Per questo motivo, non ci occuperemo mai di vincoli esplicitamente dipendenti dal
tempo.
N
Fig. 5.6.2: Pendolo con lunghezza variabile. Il meccanismo raffigurato varia la lunghezza del pendolo
durante il moto.
5.7 Lavoro e energia cinetica per un corpo rigido
Consideriamo un corpo rigido. Sappiamo già che le forze interne che mantengono costanti le
distanze fra i suoi punti compiono complessivamente lavoro nullo. Vogliamo calcolare il lavoro
complessivo delle forze esterne. Supponiamo come di consueto che il corpo sia formato da punti
materiali Pi e che sia Fi la somma delle forze esterne applicate a ciascun punto. Avremo per il
lavoro
�
�
L=
Fi · dPi =
Fi · vi dt
(5.7.1)
i
i
Esprimiamo le velocità dei punti secondo la formula generale del moto del corpo rigido (2.11.2), in
155
5.7
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
funzione della velocità di un particolare punto C, appartenente al corpo o comunque solidale col
suo moto, e della velocità angolare
L=
=
�
i
Fi · [vC + ω × (Pi − C)] dt =
�
�
i
�
Fi · vC dt +
�
�
i
�
i
Fi · vC dt +
�
�
i
Fi · [ ω × (Pi − C)] dt =
(5.7.2)
(Pi − C) × Fi · ω dt = Re · vC dt + τ e · ω dt
Il primo termine della (5.7.2) rappresenta il lavoro che sarebbe associato alla risultante delle forze
esterne se venisse applicata al punto C. Se ω = ϕ̇ u, con u versore, il secondo termine si può scrivere
come τω dϕ, dove τω è la componente del momento risultante delle forze esterne nella direzione di
ω . In 4.6 abbiamo affermato che il moto di un corpo rigido è determinato dalle equazioni cardinali,
ossia dalla conoscenza della risultante e del momento risultante delle forze esterne. Qui vediamo
che anche il lavoro è funzione solo di questi due elementi.
5.7.1 Teorema di König
Il teorema di König stabilisce una proprietà importante dell’energia cinetica di un sistema meccanico. Consideriamo un osservatore solidale con un riferimento che possiamo considerare fisso, il
quale studia il moto di un sistema meccanico; per lui l’energia cinetica del sistema è data dalla
(5.2.6), con le velocità da lui misurate. Consideriamo adesso un riferimento con l’origine nel centro
di massa del sistema meccanico e gli assi che si mantengono sempre paralleli a quelli del sistema
fisso; un osservatore su questo sistema attribuirà alle velocità i valori dati dalla (2.10.8) con ω = 0.
Se chiamiamo ui le velocità misurate da questo secondo osservatore, fra queste e le velocità vi
misurate nel riferimento fisso vale la semplice relazione
vi = ui + vG
(5.7.3)
dove vG è la velocità del centro di massa misurata nel rifermento fisso.
Se introduciamo la (5.7.3) nella (5.2.6) otteniamo per l’energia cinetica
1 �
1 �
2
mi [ui + vG ]2 =
mi [u2i + 2 ui · vG + vG
]=
2 i
2 i
�
�
�
1 �
1
2
2
=
mi ui + M vG +
mi ui · vG =
2 i
2
i
1
1 �
2
= M vG
+
mi u2i
2
2 i
T =
(5.7.4)
�
Dove M è la massa totale del sistema. Il risultato deriva dal fatto che i mi ui = M uG = 0,
in quanto uG è la velocità del centro di massa misurata in un riferimento dove il punto stesso
è l’origine. L’energia cinetica di un sistema meccanico si può quindi sempre considerare come la
somma di due parti: la prima, detta energia cinetica del centro di massa, è quella che si avrebbe se
tutta la massa del sistema fosse concentrata nel centro di massa, la seconda parte, detta relativa
al centro di massa è quella che si misura in un riferimento avente l’origine nel centro di massa.
Il teorema di König ha utilità particolare nel caso di un sistema rigido, in cui permette di
semplificare grandemente il calcolo dell’energia cinetica. Per giungere al risultato partiamo dal5.7.1
156
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
l’espressione generale dell’energia cinetica (5.2.6) e vi introduciamo la relazione cinematica (2.11.2)
scritta rispetto al centro di massa G
1 �
1 �
2
mi vi2 =
mi [vG + ω × (Pi − G)] =
2 i
2 i
�
1 �
1 �
2
2
=
mi vG
+
mi [ ω × (Pi − G)] +
mi vG · [ ω × (Pi − G)] =
2 i
2 i
i
�
�
�
�
�
�
1
1
2
2
= M vG
+
mi [(Pi − G) × uω ]
ω 2 + vG · ω ×
mi (Pi − G) =
2
2
i
i
T =
=
(5.7.5)
1
1
2
M vG
+ IGω ω 2
2
2
Il secondo termine nel penultimo passaggio contiene, in parentesi graffe,
la definizione di momento
�
d’inerzia (4.5.2), mentre nel terzo termine si annulla la sommatoria i mi (Pi −G) = M (G−G) =
0. Vediamo quindi che la componente dell’energia cinetica del corpo rigido relativa al centro di
massa corrisponde alla metà del momento d’inerzia del corpo rispetto a un asse parallelo ad ω
passante per G, moltiplicata per il quadrato della velocità angolare.
Un caso particolare si ha quando un corpo rigido è vincolato a muoversi rotando intorno ad
un asse fisso. Se O è un punto dell’asse, possiamo scrivere vG = ω × (G − O), da cui (vedi 4.5)
ω | D, dove D è la distanza di G dall’asse di rotazione. Avremo quindi
|vG | = |ω
T =
1
1
1
M D2 ω 2 + IGω ω 2 = IOω ω 2
2
2
2
(5.7.6)
Dove nell’ultimo passaggio si è utilizzato il teorema di Huygens–Steiner. L’energia cinetica di un
corpo rigido ruotante intorno ad un asse fisso è la metà del prodotto del momento d’inerzia rispetto
all’asse per il quadrato della velocità angolare.
5.8 Studio del moto attraverso l’energia potenziale
Consideriamo la fig. 5.8.1, dove un oggetto di massa m è vincolato a muoversi lungo una guida
priva di attrito disposta in un piano verticale
y
A
B
T/mg
D
C
E
V/mg
F
O
x
Fig. 5.8.1: Un corpo di massa m è vincolato a muoversi lungo una guida priva di attrito disposta
in un piano verticale.
157
5.8
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Utilizziamo un sistema di riferimento con l’asse X orizzontale, nel piano di moto, disposto
all’altezza del punto F all’estremità più bassa della guida, e con l’asse Y verticale. La guida può
essere rappresentata matematicamente da una funzione y = f (x), che ne dà l’altezza in funzione
della coordinata x. All’oggetto di massa m, che supponiamo di dimensioni trascurabili, sono
applicate la forza peso e la reazione vincolare della guida. La forza peso è conservativa e, per
quanto visto in 5.5.1, ha un’energia potenziale pari a
V = m g y = m g f (x)
(5.8.1)
L’energia potenziale del punto materiale risulta quindi proporzionale all’andamento altimetrico della guida. Supponiamo che all’istante iniziale l’oggetto venga abbandonato da fermo dalla posizione
A in figura. Possiamo scrivere l’equazione della conservazione dell’energia
1
m v 2 + m g y = m g yA
2
(5.8.2)
dove l’energia meccanica in una configurazione generica è uguagliata a quella iniziale. Questa
equazione ci permette di conoscere il modulo della velocità del punto in qualsiasi
posizione del
√
suo moto successivo. Ad esempio nel punto F, con yF = 0, avremo |v| = 2 g yA . Un’analisi
qualitativa del moto ci fa vedere che il corpo comincia a muoversi dalla posizione in A con la
componente X della velocità diretta verso destra, √
e che la componente non cambierà segno nel
moto successivo, per cui nel punto F avremo ẋ = 2 g yA . Osserviamo quindi ancora una volta
come un principio di conservazione permetta di trarre dei risultati su una situazione finale di moto
senza dover analizzare nei particolari tutto ciò che avviene negli istanti intermedi. In effetti ci è
bastato conoscere l’altezza iniziale e finale dell’oggetto, senza dover fare calcoli inerenti l’andamento
specifico di f (x).
Quanto detto sopra tuttavia necessita di una precisazione: la (5.8.2) ci dice con quale velocità
in modulo l’oggetto arriverebbe alla posizione finale in F, ma da sola non ci assicura del fatto che
il moto si sviluppi effettivamente cosı̀. Per approfondire il discorso dobbiamo considerare che la
funzione f (x) è proporzionale all’energia potenziale dell’oggetto, f (x) = V /(mg). Questo fatto
ci porta a interpretare la figura che rappresenta la guida anche come un grafico dell’energia del
sistema. Se infatti tracciamo dal punto A una linea orizzontale, l’altezza yA di questa rispetto
all’asse X risulterà proporzionale all’energia meccanica totale E del sistema: yA = E/(mg). Se
consideriamo adesso la situazione in un punto qualunque, possiamo identificare la distanza verticale
dalla quota del punto alla retta tracciata prima come proporzionale, sempre con lo stesso fattore
1/(mg), all’energia cinetica che compete all’oggetto in quella posizione. Questo ragionamento ci
consente una descrizione qualitativa ma corretta del moto: possiamo dire, ad esempio, che l’oggetto
accrescerà la sua velocità (parliamo sempre di moduli) fino ad arrivare al punto C, dove l’altezza
della guida ha un minimo locale, poi la velocità diminuirà fino al punto D, un massimo locale.
Possiamo dire anche che in D l’oggetto avrà la stessa velocità che aveva quando prima è passato
per B, punto alla stessa quota di D. Da D in poi vediamo che la velocità aumenterà di nuovo fino
al raggiungimento di F.
Dal grafico possiamo vedere anche un’altra cosa: se avessimo abbandonato il corpo da fermo in
una posizione sulla guida intermedia fa i punti B e D, esso non avrebbe mai potuto raggiungere
nel moto il punto F. Infatti la sua energia totale è rappresentata nel grafico dalla linea orizzontale
tratteggiata in rosso e l’energia cinetica dalla distanza in verticale fra questa e il profilo della guida;
non potendosi avere un’energia cinetica negativa il moto non può svilupparsi oltre i punti dove la
linea dell’energia totale tocca il profilo. In questo caso il moto sarebbe stato confinato in quella
che viene chiamata una buca di potenziale; nei punti estremi raggiunti l’energia cinetica è nulla e
l’oggetto si ferma, invertendo il suo moto. Dato poi che la velocità del corpo dipende solo dalla sua
5.8
158
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
quota, possiamo concludere che il moto confinato sarebbe costituito dall’alternarsi di due fasi, in
una delle quali il movimento è verso destra e nell’altra verso sinistra; ogni fase poi sarebbe percorsa
nello stesso tempo e i due moti sarebbero fra loro speculari, formando un moto periodico.
5.8.1 Energia potenziale e equilibrio
Sempre riferendoci alla situazione di fig. 5.8.1, vogliamo vedere cosa succede se abbandoniamo il
corpo da fermo in una delle posizioni C, D o E, dove il profilo della guida, rappresentato da f (x)
ha rispettivamente un minimo relativo, un massimo relativo e un flesso orizzontale. Ragionando in
termini di forze, possiamo dire che in tutti e tre i casi la guida ha localmente la tangente orizzontale
e quindi l’oggetto, se inizialmente fermo, si comporta come se fosse su una guida orizzontale, ossia
rimane fermo; questo corrisponde al fatto che la reazione vincolare esercitata dalla guida sul corpo
risulta verticale e compensa esattamente la forza peso. Diciamo quindi che le posizioni C, D o E
sono configurazioni di equilibrio del sistema, intendendo con questa espressione: configurazioni tali
che se il sistema meccanico vi si trova a un certo istante con le velocità di tutti i suoi punti nulle
(ossia, equivalentemente, con energia cinetica nulla), esso rimarrà fermo indefinitamente.
Possiamo ricavare lo stesso risultato anche in generale, senza un’analisi basata direttamente
sulle forze, per un qualsiasi sistema meccanico dove i vincoli siano ideali e le forze conservative.
Se al tempo t = 0 il sistema è fermo e non si trova in equilibrio, al tempo dt dovrà avere una
quantità infinitesima di energia cinetica dT > 0. Supponiamo che il sistema abbia r gradi di
libertà, rappresentati dai parametri {q1 , q2 . . . qr }. Lo spostamento infinitesimo di ciascun punto
P del sistema sarà rappresentabile mediante le variazioni infinitesime dei parametri di moto
dP =
∂P
∂P
∂P
dq1 +
dq2 + . . . +
dqr
∂q1
∂q2
∂qr
(5.8.3)
Se consideriamo tutte le possibili combinazioni di variazioni infinitesime {dq1 , dq2 . . . dqr }, ad esse
corrisponderanno tutti i possibili spostamenti infinitesimi del sistema compatibili con i vincoli. Se
le condizioni iniziali corrispondono a un punto di stazionarietà dell’energia potenziale, ossia una
configurazione {q10 , q20 . . . qr0 } tale che
�
∂V (q1 , q2 , qr ) ��
=0
�
∂qi
q10 ,q20 ...qr0
∀i,
1≤i≤r
(5.8.4)
avremo per la variazione di energia potenziale
dV =
r
�
∂V
dqi = 0
∂qi
i=1
⇒
dT = 0
(5.8.5)
Per la conservazione dell’energia a una variazione nulla di energia potenziale corrisponde una
variazione nulla di energia cinetica. Quindi qualsiasi sistema di spostamenti infinitesimi permesso
dai vincoli non produrrebbe un’energia cinetica positiva: da ciò segue che il sistema non si metterà
in moto e resterà nella sua configurazione di quiete, per cui sarà in equilibrio.
Torniamo ora al problema di fig. 5.8.1: i punti C, D ed E sono punti di equilibrio, ma il punto
C, dove l’energia potenziale ha un minimo relativo, gode di una proprietà particolare. Se infatti
spostiamo l’oggetto di un piccolo tratto da C e l’abbandoniamo da fermo, oppure se agiamo su di
esso, fermo inizialmente in C, con una forza ulteriore per un tempo breve, fornendogli un’energia
159
5.8.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
cinetica non nulla, il moto successivo del corpo si manterrà nelle immediate vicinanze di C. Una
posizione di equilibrio che gode di questa proprietà si dice di equilibrio stabile. È facile vedere che,
invece, le posizioni d’equilibrio in D e E, dove la funzione ha rispettivamente un massimo relativo
e un flesso orizzontale, non sono stabili: un minimo spostamento dell’oggetto provocherà l’avvio
di un moto che lo porterà lontano dal punto di partenza. Questo equilibrio è detto instabile.8 Nel
caso di una energia potenziale che dipende da più parametri si possono presentare configurazioni
di stazionarietà ancora diverse, come il punto di sella (vedi fig. 5.8.2): solo in caso di un minimo
relativo avremo equilibrio stabile.
z
y
O
x
Fig. 5.8.2: Grafico di un’energia potenziale funzione di due parametri, V (x.y) che presenta un punto
di sella nell’origine.
5.8.2 Piccole oscillazioni
In 3.9.3 abbiamo studiato il moto di un blocco sotto l’effetto della forza di una molla, giungendo all’equazione di moto ẍ + ω 2 x = 0 (3.9.19), dove ω 2 = k/m. In 5.5.2 abbiamo dimostrato
che la forza della molla è conservativa e corrisponde a un’energia potenziale, nel caso di 3.9.3,
V (x) = (1/2) k x2 . Con le condizioni iniziali già utilizzate, x(0) = x0 , ẋ(0) = 0 possiamo scrivere
l’equazione della conservazione dell’energia, scrivendo l’espressione generale dell’energia meccanica
e uguagliandola al valore dell’espressione stessa calcolato nelle condizioni iniziali
1
1
1
mẋ2 + k x2 = k x20 = E
2
2
2
(5.8.6)
dove E, costante, corrisponde all’energia potenziale iniziale. In generale, qualsiasi siano le condizioni iniziali, avremo un’equazione del tipo
ẋ2 + ω 2 x2 = C
8
(5.8.7)
In alcuni testi si parla anche di equilibrio indifferente, riferendosi alla situazione in cui l’energia potenziale si mantiene
costante per un intervallo finito di valori del parametro, come ad esempio nel caso di un corpo poggiato su una
guida orizzontale.
5.8.2
160
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Dove C è una costante non negativa. Se deriviamo rispetto al tempo la (5.8.7) troviamo la (3.9.19).
Possiamo quindi dire che un’equazione nella forma (5.8.7) rappresenta un moto armonico con
pulsazione ω.
Consideriamo adesso un sistema meccanico con un solo grado di libertà, rappresentato dal parametro q, in cui tutte le forze sono conservative e i vincoli ideali. Il vettore posizione di ogni punto
del sistema sarà funzione del parametro di moto q: (Pi − O) = (Pi − O)(q). Corrispondentemente
le velocità dei punti saranno date da vi = (dPi /dq) q̇. Possiamo scrivere l’energia cinetica del
sistema come
�
�2
1 �
1 �
dPi
1
2
T =
mi vi =
mi
q̇ 2 = A(q) q̇ 2
(5.8.8)
2 i
2 i
dq
2
dove A(q) è la funzione che risulta dalla sommatoria, sempre positiva.9 Al sistema corrisponderà
un’energia potenziale V (q); supponiamo che la configurazione q = q0 corrisponda a un minimo
dell’energia potenziale. Si avrà quindi in q0 una situazione di equilibrio stabile, la quale ci assicura
del fatto che, se abbandoneremo il sistema da fermo con |q − q0 | sufficientemente piccolo, o lo
faremo partire da q = q0 con energia cinetica sufficientemente piccola, il moto sarà confinato in
un intervallo intorno a q0 . Per questo motivo, potremo approssimare l’energia potenziale V (q) in
serie di potenze intorno a q = q0
�
1 d2 V ��
V (q) � V (q0 ) +
(q − q0 )2
2 dq 2 �q=q0
dove
�
d2 V ��
>0
dq 2 �q=q0
(5.8.9)
Nell’espansione manca il termine al primo ordine, dato che in un minimo la derivata dV /dq è nulla,
mentre la derivata seconda è positiva.10 Scriviamo la conservazione dell’energia meccanica
�
1
1 d2 V ��
A(q) q̇ 2 + V (q0 ) +
(q − q0 )2 = E
2
2 dq 2 �q=q0
(5.8.10)
Se introduciamo un nuovo parametro η = q − q0 e, considerando che il moto è confinato in un
intorno ristretto di q0 , approssimiamo11 A(q) � A(q0 ), avremo
�
1
1 d V ��
2
A(q0 ) η̇ +
η2 = C
2
2 dq 2 �q=q0
2
9
10
11
⇒
η̇ 2 + ω 2 η 2 = C �
dove ω 2 =
d2 V
dq 2
�
�
�
q=q0
A(q0 )
(5.8.11)
Per determinati sistemi possono esistere configurazioni limite in cui A(q) = 0 per particolari valori di q, ma non
sono di interesse nel caso che stiamo studiando.
Una funzione di una variabile può avere un minimo relativo in cui anche la derivata seconda e terza nel punto
sono nulle e la prima derivata non nulla è la quarta, ma si tratta di un caso particolare di scarso interesse pratico.
Esso si verifica in alcuni problemi idealizzati quando al variare di un parametro, ad esempio la costante k di una
molla, si raggiunge il valore per cui una posizione d’equilibrio passa da stabile a instabile. In queste condizioni si
hanno piccole oscillazioni non armoniche, il cui periodo cresce al diminuire dell’ampiezza, ma ciò avviene solo per
un preciso valore del parametro e anche la minima variazione porta a un normale caso di oscillazioni armoniche o a
un equilibrio instabile.
Possiamo approssimare la funzione A(q) all’ordine zero in q − q0 perché A(q0 ) è un valore positivo finito, per cui
i termini successivi della serie di potenze si possono trascurare. Non possiamo invece fare lo stesso con l’energia
potenziale, perché se la considerassimo semplicemente costante elimineremmo del tutto l’effetto delle forze che
richiamano il sistema verso la posizione di equilibrio stabile.
161
5.8.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
dove C e C � sono costanti. La (5.8.11) ha quindi la stessa forma della (5.8.7). Se ne deduce che
per un sistema a un grado di libertà con vincoli ideali e forze conservative se esistono posizioni
di equilibrio stabile in un loro intorno si avranno moti oscillatori armonici, con la pulsazione data
dalla (5.8.11).
Si ha una situazione analoga anche nel caso di sistemi con più gradi di libertà nell’intorno di un
punto di minimo dell’energia potenziale. Una teoria dettagliata sarebbe al di sopra del livello del
corso, ma possiamo enunciare il risultato, ossia il fatto che in questo caso, per un sistema a n gradi
di libertà, esisteranno n combinazioni lineari dei parametri qi a cui corrisponderanno equazioni di
moto armonico con n pulsazioni in generale diverse, dette modi normali d’oscillazione del sistema.
Alcuni di questi modi potranno essere degeneri, ossia non corrispondere a oscillazioni con periodo
finito ma a moti di traslazione o rotazione con velocità o velocità angolare costanti.
Ad esemplificazione di quanto detto sopra possiamo considerare il problema dei due corpi legati
da una molla visto in 4.1. Supponiamo che la molla possa agire sia a trazione che a compressione
e fissiamo per i centri di massa dei due corpi origini diverse sull’asse X, spostate fra loro di una
distanza pari alla lunghezza di riposo l0 della molla. In questo modo se x1 = x2 = 0 la molla risulta
a riposo e l’energia potenziale associata alla molla è V = (1/2) k (x2 −x1 )2 . L’energia potenziale ha
un minimo quando x1 = x2 e quindi nell’intorno di ogni punto che soddisfi la condizione avremo
due modi normali d’oscillazione. Non avendo a disposizione i risultati della teoria a n gradi di
libertà, non potremo procedere utilizzando la conservazione dell’energia, ma mostreremo i risultati
scrivendo direttamente le equazioni di moto che derivano dal secondo principio della dinamica.
Non è difficile determinare le forze che la molla esercita sui due oggetti: supponiamo che sia
inizialmente x1 = x2 = 0 e che spostiamo il secondo oggetto di una quantità positiva ∆x2 . La
molla si allungherà di tale quantità e quindi eserciterà sul primo oggetto una forza F1,2 = k ∆x2 i
Se invece avessimo spostato il primo oggetto di una quantità positiva ∆x1 la molla si sarebbe
accorciata e avrebbe esercitato su di esso una forza F1,2 = −k ∆x1 i. Da questo deriva che per
una qualsiasi configurazione la forza agente sul primo oggetto è F1,2 = k (x2 − x1 ) i. Per il terzo
principio sarà poi F2,1 = −F1,2 . Possiamo quindi scrivere le equazioni di moto
�
m1 ẍ1 = k (x2 − x1 )
m2 ẍ2 = k (x1 − x2 )
(5.8.12)
Sommando membro a membro le equazioni abbiamo m1 ẍ1 + m2 ẍ2 = 0, ossia m1 ẋ1 + m2 ẋ2 =
Px = cost., come avevamo già determinato considerando la conservazione della quantità di moto.
La coordinata xG del centro di massa del sistema, che è una combinazione lineare delle ascisse dei
due punti, evolve nel tempo a velocità costante, e costituisce un modo di oscillazione degenere.
Consideriamo un’altra combinazione lineare delle coordinate, δ = x2 − x1 . Calcoliamo la sua
derivata seconda tenendo conto delle (5.8.12)
ẍ2 − ẍ1 = −
�
k
k
+
m1
m2
�
(x2 − x1 )
⇒
δ̈ +
k
m1 m2
δ = 0 dove µ =
µ
m1 + m2
(5.8.13)
Vediamo che la differenza fra le ascisse dei due corpi evolve nel tempo come la coordinata di un
oggetto di massa µ che oscilla attaccato a una molla di costante k. Questo costituisce il secondo
modo normale, non degenere, del sistema. La quantità µ è detta massa ridotta del sistema a due
corpi e vedremo che compare in tutti i problemi in cui si ha un sistema di due corpi soggetto
soltanto a forze interne.
Come ulteriore esempio consideriamo il sistema di fig. 5.8.3, dove su una guida rettilinea orizzontale priva di attrito sono disposti tre corpi. I due corpi nelle posizioni esterne, 1 e 2, hanno
massa m mentre quello centrale, il corpo 3, ha massa M . Fra i corpi sono interposte due molle di
5.8.2
162
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
ugual costante k, capaci di agire sia a trazione che a compressione. Scegliamo anche in questo caso
origini diverse per le ascisse dei tre corpi, spostate una rispetto all’altra in modo tale che quando
x1 = x2 = x3 = 0 entrambe le molle risultano scariche.
y
F1,3
x1
m
k
x3
x2
k
F3,2 F3,1
F2,3
M
m
x
Fig. 5.8.3: Sistema oscillante composto da due corpi di massa m fra i quali è interposto un corpo di
massa M . I tre oggetti si muovono lungo una guida rettilinea orizzontale priva di attrito e sono collegati
da molle di ugual costante k. Sono indicate solo le forze agenti in direzione orizzontale.
Con un ragionamento analogo a quello del caso precedente possiamo ricavare i valori delle forze
che le molle applicano ai corpi in funzione della loro posizione e abbiamo F1,3 = k (x3 − x1 ) i,
F2,3 = k (x3 − x2 ) i. Scriviamo le equazioni di moto
m ẍ1 = k (x3 − x1 )
m ẍ2 = k (x3 − x2 )
M ẍ3 = k (x1 + x2 − 2x3 )
(5.8.14)
Anche in questo caso sommando membro a membro le tre equazioni troviamo m ẍ1 +m ẍ2 +M ẍ3 =
0, ossia la conservazione della componente x della quantità di moto, il modo normale degenere.
Sottraendo membro a membro la prima equazione dalla seconda e introducendo un nuovo parametro
di moto η = x2 − x1 abbiamo
m (ẍ2 − ẍ1 ) = −k (x2 − x1 )
⇒
η̈ +
k
η=0
m
(5.8.15)
Al parametro η è associato il secondo modo normale di oscillazione. Introduciamo poi il parametro
δ = x1 + x2 − 2x3 e calcoliamoci δ̈ utilizzando le (5.8.14)
δ̈ =
k
k
k
(x3 − x1 ) + (x3 − x2 ) − 2 (x1 + x2 − 2x3 )
m
m
M
⇒
δ̈ +
k
mM
2m+M
δ=0
(5.8.16)
che ci dà il terzo modo normale. È interessante notare che se facessimo partire il sistema da
fermo con x3 (0) = 0 e x2 (0) = −x1 (0) = x0 il sistema si muoverebbe di un moto periodico
avente per pulsazione il secondo modo normale, in cui x3 (t) = 0 e x2 (t) = −x1 (t). La massa
centrale resterebbe ferma mentre le masse laterali oscillerebbero in modo speculare intorno ad
essa, allontanandosi e avvicinandosi simultaneamente. Se invece partissimo, sempre con il sistema
fermo, con x1 (0) = x2 (0) = 0 e x3 (0) = x0 avremmo un moto oscillatorio con la pulsazione del terzo
163
5.8.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
modo normale, in cui le due masse esterne si muovono sempre alla stessa velocità, mantenendo
quindi la distanza iniziale, mentre la massa interna si muove in controfase con loro. Le ampiezze
sarebbero tali da mantenere fermo il centro di massa del sistema. È sempre possibile, con opportune
condizioni iniziali, eccitare uno solo dei modi normali di un sistema oscillante, ottenendo un moto
periodico del sistema in cui ogni parte si muove di moto armonico, mentre in generale il moto è
dato da una sovrapposizione di diversi modi normali, per cui non risulta periodico.
5.9 Energia potenziale centrifuga
Vogliamo verificare se è possibile utilizzare la conservazione dell’energia meccanica nel sistema
di riferimento di una piattaforma girevole intorno ad un asse fisso con velocità angolare costante,
come definito in 3.10.2. Supponiamo innanzitutto che i vincoli del sistema meccanico siano ideali
e che tutte le forze non d’inerzia siano conservative. Utilizziamo anche adesso un sistema di
coordinate cilindriche con l’asse Z corrispondente all’asse di rotazione. Ogni punto materiale
nel sistema di riferimento rotante è soggetto alla forza di trascinamento e alla forza di Coriolis.
Quest’ultima risulta sempre perpendicolare alla velocità del punto materiale e quindi il lavoro
ω × v) · v dt risulta nullo.
corrispondente a qualsiasi spostamento infinitesimo, dato da dL = −2 m (ω
La forza di Coriolis, quindi, pur non essendo conservativa (dipendendo dalla velocità, non è neppure
posizionale) non fa mai lavoro e quindi non altera il bilancio energetico del sistema.
La forza di trascinamento si riduce alla forza centrifuga, data dalla prima delle (3.10.7)
Fcf g = m ω 2 r ur = m ω 2 (x i + y j)
(5.9.1)
È facile verificare che questa forza posizionale è conservativa e corrisponde a un’energia potenziale
1
1
Vcf g = − m ω 2 (x2 + y 2 ) = − m ω 2 r2
2
2
(5.9.2)
Consideriamo il moto in fig. 3.10.4, ossia quello di un punto materiale che è vincolato a muoversi
lungo una guida senza attrito disposta radialmente sulla piattaforma e viene abbandonato dalla
quiete con r(0) = r0 . Nel sistema della piattaforma la velocità del punto è data da ṙ ur . La guida
si comporta come un vincolo ideale e quindi l’unica energia potenziale che dobbiamo considerare è
quella centrifuga. La conservazione dell’energia si scrive
1
1
1
m ṙ2 − m ω 2 r2 = − m ω 2 r02
2
2
2
ṙ2 = ω 2 (r2 − r02 )
⇒
(5.9.3)
�
La (5.9.3) si può integrare per separazione delle variabili. Delle due soluzioni ṙ = ±ω r2 − r02
dobbiamo prendere quella con segno positivo in base alla prima delle due equazioni di moto (3.10.12)
(la quale si ritrova immediatamente derivando rispetto al tempo la (5.9.3)). Separando le variabili
e integrando abbiamo
�
r(t)
r0
dr
�
=ω
2
r − r02
�
t
dt
ponendo r = z r0
0
⇒
�
1
z(t)
dz
√
= ωt
z2 − 1
(5.9.4)
La funzione integranda nell’ultimo passaggio ha come primitiva arccosh z, da cui si ricava la soluzione (3.10.14).
5.9
164
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Va notato che mentre nel sistema della piattaforma possiamo utilizzare la conservazione dell’energia meccanica, questa non si conserva nel sistema inerziale. Per mantenere la piattaforma a
velocità angolare costante mentre il punto materiale si allontana dall’asse di rotazione occorre un
motore che applichi un momento alla piattaforma e faccia lavoro. Possiamo calcolare il lavoro fatto
dal motore nell’intervallo di tempo che occorre al punto materiale per passare dalla posizione iniziale a una con distanza dall’asse pari a r1 . Le uniche forze che fanno lavoro sul sistema sono quelle
applicate dal motore. Per il teorema delle forze vive il lavoro fatto corrisponderà alla variazione
di energia cinetica; la piattaforma è un corpo rigido che ruota intorno a un asse fisso con velocità
angolare costante e quindi la sua energia cinetica non varia. Resta la variazione di energia cinetica
del punto materiale. La sua velocità nel sistema inerziale è data dalla (2.8.21): v = ṙ ur + r ω uϕ .
L’energia cinetica vale quindi
T =
1
m (ṙ2 + r2 ω 2 )
2
(5.9.5)
Il lavoro del motore equivale alla variazione di energia cinetica
L=
1
1
1
1
m (ṙr21 +r12 ω 2 )− m r02 ω 2 = m (r12 ω 2 −r02 ω 2 +r12 ω 2 )− m r02 ω 2 = m ω 2 (r12 −r02 ) (5.9.6)
2
2
2
2
Dove si è calcolato ṙr21 dalla (5.9.3).
A titolo di esercizio, possiamo calcolare il lavoro anche con un altro metodo, considerando che
al punto materiale è applicata la reazione vincolare N = 2 m ω ṙ uϕ , ricavata nelle (3.10.12). Una
forza uguale e opposta è applicata alla piattaforma per il terzo principio. La piattaforma è un corpo
rigido che ruota intorno ad un asse fisso con velocità angolare costante, e quindi il suo momento
angolare non varia. Perché questo succeda occorre che il motore applichi alla piattaforma un
momento di forza opposto a quello della reazione vincolare applicata alla piattaforma, e quindi
coincidente col momento della forza N applicata al punto materiale. Tale momento vale
τ = r ur × 2 m ω ṙ uϕ = 2 m ω r ṙ k
(5.9.7)
Applicando un tale momento il motore deve fare in ogni intervallo di tempo infinitesimo un lavoro
dL = τ ω dt (vedi (5.7.2)). Avremo quindi
L=
�
tf
2 m ω r ṙ ω dt = 2 m ω
0
2
�
r1
r0
r dr = m ω 2 (r12 − r02 )
(5.9.8)
5.10 Potenza
Data una forza F applicata ad un punto P che si muove, si definisce potenza media W in un
intervallo di tempo (ti , tf )
W =
L
tf − ti
(5.10.1)
dove L è il lavoro compiuto dalla forza nell’intervallo di tempo. La potenza media è quindi definita
come il rapporto fra il lavoro compiuto e il tempo impiegato a compierlo. Se consideriamo un
165
5.10
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
intervallo di tempo dt infinitesimo e il corrispondente lavoro infinitesimo dL possiamo definire la
potenza istantanea come
W =
dL
dt
(5.10.2)
Considerando la definizione di lavoro la potenza si può esprimere anche come
W =
F · dP
F · v dt
=
=F·v
dt
dt
(5.10.3)
ossia come prodotto scalare della forza per la velocità del punto materiale a cui è applicata.
La potenza, essendo il rapporto fra lavoro e tempo, ha dimensioni
[W ] = L2 M T −3
(5.10.4)
L’unità di misura della potenza è il watt 12 , dal nome di James Watt (1736–1819), inventore e
ingegnere meccanico inglese famoso soprattutto per il suo contributo allo sviluppo del motore a
vapore, e viene indicata simbolicamente con W. La potenza di 1 W corrisponde a un lavoro di 1 J
fatto in 1 s.
Il concetto di potenza è largamente utilizzato anche al di fuori dell’ambito strettamente scientifico–tecnologico, perché a molti dispositivi utilizzati quotidianamente è associata una potenza o,
più spesso, una potenza massima che possono produrre o assorbire: dalle lampadine ai motori, agli
amplificatori audio. Per questo motivo esistono anche altre unità di misura diverse dal watt, come
il cavallo-vapore 13 , CV (1 CV � 735 W), utilizzato fino a non molti anni fa come unità standard
per la potenza dei motori. Infine, il watt è usato come base per l’unità di energia chilowattora,
kWh, corrispondente al lavoro prodotto da una potenza di 1000 W impiegata per un’ora: 1 kWh =
3.6 · 106 J.14
Per avere un’idea pratica delle potenze associate all’uomo e alle macchine, possiamo ricordare
che un atleta può produrre fino a 300 ÷ 400 W di potenza per periodi dell’ora, o arrivare a punte
istantanee oltre il kW; un’auto utilitaria ha potenze generalmente al di sotto dei 50 kW; una
centrale elettrica può generare potenze delle centinaia di MW o dei GW.
Possiamo studiare come esempio il moto di un corpo a cui è applicata una forza (variabile) F da
un dispositivo con una potenza costante W . Vogliamo vedere come varia nel tempo la velocità del
corpo di massa m inizialmente fermo al tempo t = 0. Se consideriamo un sistema di riferimento
con l’asse X nella direzione della forza, dal teorema delle forze vive (5.2.4) avremo
dL = W dt = dT
12
13
14
⇒
Wt=
1
m ẋ2
2
⇒
ẋ(t) =
�
2W t
m
(5.10.5)
A differenza di altre unità di misura, come il newton e il joule, che vengono pronunciate secondo la fonetica inglese, in
Italia, anche nell’ambiente della fisica, è uso pronunciare watt secondo la fonetica italiana. Ciò deriva probabilmente
dal fatto che questa unità, a differenza delle altre citate, usate quasi esclusivamente nel contesto della fisica, viene
largamente utilizzata nella vita di tutti i giorni,
La definizione originale fa corrispondere l’unità di misura alla potenza necessaria per sollevare, al livello del mare,
una massa di 75 kg per l’altezza di 1 m nel tempo di 1 s. Nel mondo anglosassone è usato l’unità HP horsepower,
con diverse definizioni e valori a seconda del campo di applicazione.
Purtroppo nel linguaggio corrente viene fatta spesso confusione fra kWh e kW, e capita di sentir dire che la fattura
dell’energia elettrica riporta un consumo di tot kW!
5.10
166
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Questo risultato ci mostra che se vogliamo far accelerare un’auto di massa pari a m = 1000 kg
da ferma fino alla velocità v = 100 km/h in un tempo t = 10 s avremo bisogno di un motore di
potenza non inferiore a
W =
m v2
=
2t
1000 kg ·
�
105 m
3.6 · 103 s
20 s
�2
� 38.6 kW
(5.10.6)
La stima fatta stabilisce solo un valore teorico minimo della potenza, per due ordini di motivi:
a. Abbiamo trascurato completamente qualsiasi forza che si opponga al moto, come gli attriti interni nel sistema di trasmissione e l’attrito fra le ruote e il terreno15 . Abbiamo trascurato inoltre
l’attrito dell’aria sul veicolo, che cresce con la velocità e oltre 50 km/h comincia a diventare
l’effetto dominante.
b. Il motore non è in grado di produrre in ogni condizione la sua potenza massima. In particolare
dalla (5.10.3) si vede che per fornire una potenza costante quando la velocità tende a zero
sarebbe necessaria una forza che tende a infinito.
In pratica, per ottenere un’accelerazione come questa richiesta servono motori con potenza
almeno circa doppia di quella ricavata con la (5.10.6).
5.10.1 Potenza e motori
I motori sono dei dispositivi che forniscono energia meccanica a partire da forme di energia
diverse (ad esempio, nei motori a combustione interna si sfrutta l’energia, di natura elettromagnetica, associata ai legami chimici delle molecole), in modo continuativo, finché la fonte di energia
è disponibile. Il caso più tipico di motore è quello in cui l’energia meccanica prodotta è fornita
attraverso la rotazione di un asse rigido, detto albero motore, che applica una coppia ai dispositivi
ad esso collegati. Una coppia di momento uguale in intensità e opposta in verso è applicata, per
il terzo principio di Newton, dalla parte del motore che non gira insieme all’albero al supporto
a cui il motore è fissato (ad esempio, la scocca del veicolo che il motore fa muovere)16 . In ogni
istante i parametri fondamentali del funzionamento di un motore di questo tipo sono il momento
τ della coppia (la coppia motrice), applicata dall’albero agli oggetti ad esso connessi, e la velocità
angolare ω di rotazione dell’albero stesso. Consideriamo solo le intensità di queste grandezze senza
evidenziarne l’aspetto vettoriale, dato che la direzione è fissata dall’asse dell’albero e il verso da
quello della rotazione. Quando l’albero motore gira con velocità angolare ω e applica una coppia
τ per la (5.7.2) produce in un intervallo infinitesimo di tempo dt un lavoro dL = τ ω dt, per cui la
potenza erogata dal motore risulta
W =τω
(5.10.7)
Fra un motore e il dispositivo su cui si vuole applicare la coppia prodotta (utilizzatore) possono
essere inseriti meccanismi, come gruppi di ingranaggi, con lo scopo di variare il rapporto fra la
velocità angolare dell’albero motore e quella dell’utilizzatore. Un dispositivo ideale di questo
genere si comporta come una macchina semplice, per cui la potenza prodotta dal motore e quella
applicata all’utilizzatore coincidono. Possiamo esemplificare questo fatto con il sistema meccanico
15
16
Non parliamo qui dell’attrito statico che mantiene il rotolamento puro di una ruota nell’esempio trattato in 4.11.1,
ma del cosiddetto attrito volvente, dovuto al fatto che il contatto fra ruota e terreno non è puntiforme, che si
manifesta come una coppia di forze diretta in modo da opporsi sempre al moto di rotolamento.
Si pensi, ad esempio, al motore che fa girare il rotore di un elicottero: al corpo del velivolo è applicata una coppia
uguale e contraria a quella delle pale, che tenderebbe a farlo ruotare in senso opposto ad esse. Questa rotazione non
desiderata è contrastata dall’elica di coda o fornendo l’elicottero di due rotori controrotanti.
167
5.10.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
di fig. 5.10.1. In a) un motore applica una coppia di momento τ a una ruota di raggio r1 , sul cui
bordo è avvolta una fune che fa sollevare un peso di massa m con velocità v costante.
a)
b)
τ
T
τ'
r1
S
r1
T
r2
T
S
T
mg
mg
Fig. 5.10.1: Confronto della potenza erogata da un motore senza e con l’introduzione di un ingranaggio. in a) il
motore applica una coppia τ a una velocità angolare ω e solleva il peso a velocità costante v. In b) il motore applica
una coppia τ � a una velocità angolare ω � e tramite ingranaggi fa girare la ruota di raggio r2 che gira solidalmente
con una di raggio r1 a cui è avvolta la fune, che solleva ancora il peso con la stessa velocità di prima. Le due ruote
dentate sono disegnate separate in modo che la forza mutua S possa essere evidenziata in modo univoco.
Da un punto di vista cinematico, se il peso sale con velocità v la ruota deve girare con velocità
angolare (prendendo come verso positivo delle rotazioni quello orario) ω = v/r1 . Sono indicate
nello schema la forza peso, la tensione T ai capi della fune, il momento τ della coppia del motore
e le reazioni vincolari al perno della ruota, che mantengono l’asse fermo (la reazione orizzontale è
tratteggiata ad indicare che il vincolo in generale sarà in grado di esercitare una tale componente
di forza, ma nel caso in esame la mancanza di altre forze orizzontali ci fa concludere che essa
avrà valore nullo). Il peso non accelera, per cui deve essere T = mg. La ruota gira a velocità
angolare costante, per cui la componente della seconda equazione cardinale nella direzione dell’asse
di rotazione, con centro di riduzione su di esso, risulta 0 = L̇ω = τ − T r1 da cui τ = T r1 = mg r1 .
In b) la ruota a cui è applicato l’albero motore ingrana in una seconda ruota di raggio r2 a cui è
rigidamente attaccata sullo stesso asse una ruota di raggio r1 , su cui è avvolta la fune che solleva il
peso, supponiamo sempre con la stessa velocità v costante del caso precedente. La velocità angolare
ω2 di questa ruota dovrà essere tale (prendendo ancora il verso positivo orario) che −ω2 r1 = v.
La ruota del motore e la seconda ruota dentata sono legate da un vincolo di rotolamento puro,
per cui le velocità dei punti di contatto devono coincidere. Questo comporta per la nuova velocità
angolare ω � della ruota a cui è applicato l’albero motore ω � r1 = −ω2 r2 (le due ruote girano in sensi
opposti) da cui ω � = v (r2 /r12 ). La velocità angolare dell’albero motore è quindi ridotta rispetto
all’altro caso (se r2 < r1 , come in figura) di un fattore r2 /r1 . Per quanto riguarda le forze, avremo
ancora ovviamente T = mg. La seconda cardinale per il corpo rigido formato dalle due ruote,
rispetto all’asse di rotazione, dà 0 = T r1 − S r2 da cui S = mg (r1 /r2 ). La seconda cardinale per
la ruota con l’albero motore dà 0 = τ � − S r1 ossia τ � = mg (r12 /r2 ). Il momento che deve fornire
adesso il motore è aumentato di un fattore r1 /r2 . La potenza sviluppata dal motore nei due casi
5.10.1
168
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
vale
v
= mg v
r1
r2 r2
caso b) W � = τ � ω � = mg 1 v 2 = mg v
r2 r1
caso a) W = τ ω = mg r1
(5.10.8)
Vediamo quindi che interponendo l’ingranaggio si può ottenere lo stesso risultato dal motore con
un valore diverso della coppia e della velocità angolare, ma la potenza richiesta rimane la stessa17 .
Per una data velocità angolare il motore può produrre una coppia che va da zero a un valore massimo; di questo possiamo convincerci pensando al fatto che, se stiamo percorrendo con un’auto una
strada piana rettilinea a velocità costante, avremo l’acceleratore fisso in una determinata posizione:
se la strada comincia a salire, per mantenere la stessa velocità, ossia, salvo cambiar marcia, per
mantenere costante ω, sarà necessario premere più a fondo sull’acceleratore, mandando più combustibile al motore per fargli produrre una coppia e una potenza maggiori. Questo perché sulla strada
piana il motore si limitava a produrre tanta energia quanta ne veniva dissipata dagli attriti e dalla
resistenza dell’aria, mentre sulla salita deve fornire anche energia che viene accumulata sotto forma
di energia potenziale gravitazionale del veicolo. la (5.10.7) ci dà poi, conoscendo la coppia massima
tM (ω), anche la potenza massima WM (ω). Ogni particolare tipo di motore è caratterizzato dalle
curve tM (ω) e WM (ω), nonché dal valore massimo di ω raggiungibile.In un contesto motoristico
la velocità angolare viene solitamente espressa in giri/min (1 giro/min = (2π/60) rad · s−1 ). In
fig, 5.10.2 sono rappresentate le curve di coppia e potenza massime per un motore a combustione
interna, a pistoni, con caratteristiche tali da essere idoneo per un’auto di prestazioni medio–alte.
120
100
200
80
150
60
100
40
50
Potenza [ kW ]
Coppia [N . m]
250
20
1000
2000
3000
4000
5000
6000
7000
Vel. ang. [ giri / min ]
Fig. 5.10.2: Curve di coppia e potenza massima in funzione della velocità angolare per un motore a
combustione interna a pistoni.
Alcune caratteristiche mostrate dal grafico sono caratteristiche di tutti i motori a pistoni usati
per autotrazione:
a. Esiste un valore di ω, ωτ M per il motore produce la massima coppia in assoluto; a questo
corrisponde un valore ωW M per cui si ha la potenza massima. Dalla (5.10.7) risulta ωτ M < ωW M .
b. Al decrescere di ω, se ω < ωτ M , decrescono la coppia e la potenza che il motore può produrre,
che sono nulle per ω → 0. Questo fatto ha diverse implicazioni:
17
La potenza richiesta, mg v, corrisponde ovviamente all’aumento di energia potenziale del peso per unità di tempo:
V = mg y dove y è la quota rispetto a un riferimento fisso, da cui dV /dt = mg ẏ = mg v
169
5.10.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
b1. Il motore non può avviarsi da solo ma deve essere messo in rotazione a mano o da un dispositivo diverso (come un motore elettrico d’avviamento).
b2. È opportuno che il motore, in caso di autotrazione, non sia collegato meccanicamente in
permanenza con le ruote, ma possa essere sconnesso e riconnesso con gradualità, cosa che si
ottiene tramite il meccanismo detto frizione.
b3. Alle basse velocità del veicolo il motore, se fosse collegato direttamente alla ruote, dovrebbe
girare troppo lentamente e non produrrebbe la coppia necessaria: per questo si inserisce fra
motore e ruote un sistema di ingranaggi che consente di variare il rapporto fra la velocità
angolare dell’albero motore e quella delle ruote, ossia il cambio. Alle basse velocità del veicolo
il rapporto fra la velocità angolare dell’albero motore e quella delle ruote è maggiore (marce
basse), mentre viene usato un rapporto più piccolo quando il veicolo si muove più velocemente
(marce alte).
Nei motori elettrici invece tipicamente la coppia non va a zero all’annullarsi della velocità angolare, anzi in alcuni casi raggiunge il valore massimo: questo consente a tali motori di avviarsi
da soli, nel momento in cui viene fatta passare corrente negli avvolgimenti al loro interno, e di
essere usati per avviare motori a combustione interna. In molte applicazioni non hanno bisogno
di un cambio di rapporti. Motori elettrici sono usati con vantaggio per la trazione di veicoli a
cui l’energia può essere fornita dall’esterno attraverso una linea di alimentazione, come per i locomotori dei treni, ma incontrano notevoli inconvenienti se questo non è possibile e l’energia deve
essere immagazzinata all’interno del veicolo stesso; questo a causa del fatto che non si dispone di
mezzi di immagazzinamento dell’energia elettrica efficienti (in termini di energia immagazzinabile
per unità di peso e di volume) e ricaricabili rapidamente, a confronto del serbatoio di combustibile
di un motore a combustione interna.
Vogliamo infine studiare, attraverso lo studio di un modello estremamente semplificato, alcune
problematiche della trazione di un veicolo a due assi.
G
V1
H1
H1
τ
x
h
l
l
V2
H2
τ
V1
N1
V2
H2 N2
T1
T2
Fig. 5.10.3: Schema semplificato della trazione di un veicolo a due assi. Le ruote sono disegnate
separate dal corpo del veicolo per poter tracciare senza ambiguità le forze mutue. Le forze V1 e V2 sono
applicate all’asse delle ruote, ma spostate in alto nel disegno per evitare la sovrapposizione con N1 e N2 .
In fig. 5.10.3 è schematizzato un veicolo a due assi che si muove di moto rettilineo su un percorso
piano, accelerando nella direzione positiva dell’asse X. Il veicolo potrebbe essere a due o quattro
ruote. Nella nostra schematizzazione
- il veicolo è costituito da un corpo rigido (carrozzeria) su cui sono imperniati gli assi delle ruote,
di raggio r, senza sospensioni e senza sterzo. Il centro di massa della carrozzeria è considerato
trovarsi a ugual distanza l in orizzontale dai due assi e a una quota h al di sopra della linea che
5.10.1
170
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
li collega.
- Il motore è applicato direttamente all’asse delle ruote posteriori. Si considerano gli assi e le
ruote di massa trascurabile rispetto a quella m della carrozzeria.
- Si trascurano attriti interni e resistenza dell’aria.
Su ciascuno dei due sistemi assi–ruote agiscono le forze vincolari che tengono l’asse solidale con
la carrozzeria, (H1 , V1 , H2 , V2 ) e le reazioni vincolari al contatto con il terreno (N1 , T1 , N2 , T2 ).
Sull’asse posteriore è applicato il momento τ prodotto dal motore. Alla carrozzeria sono applicate
le reazioni, nel senso del terzo principio, alle forze H1 , V1 , H2 , V2 e la reazione al momento che il
motore applica all’asse della trazione.
Scriviamo per ciascuna delle due ruote la prima equazione cardinale nelle direzioni orizzontale
e verticale e la componente perpendicolare al piano di figura della seconda cardinale, con centro
di riduzione nel centro di massa. Avendo considerato la massa delle ruote trascurabile avremo
post.
da cui ricaviamo
post.
T1 − H1 = 0
N − V1 = 0
1
T1 r − τ = 0
�
T1 = H1 = τr
N1 = V1
ant.
ant.
T2 − H2 = 0
N − V2 = 0
2
T2 = 0
�
T2 = H2 = 0
N2 = V2
(5.10.9)
(5.10.10)
Scriviamo le equazioni cardinali, analogamente a quanto fatto per le ruote, anche per la carrozzeria.
Come centro di riduzione della seconda cardinale usiamo il centro di massa.
m ẍ = H1 + H2
0 = V1 + V2 − mg
0 = (V2 − V1 ) l + (H2 + H1 ) h + τ
(5.10.11)
Dove nella seconda cardinale i momenti devono equilibrarsi se la carrozzeria non comincia a ruotare.
Introducendo nelle (5.10.11) i risultati delle (5.10.10) abbiamo
m ẍ = τr = m a
�
�
V1 = m
g + a h+r
2
l
�
�
V2 = m
g − a h+r
2
l
(5.10.12)
Dove abbiamo indicato con a l’accelerazione del veicolo. Questi risultati mettono in luce alcuni
fatti interessanti.
a. L’accelerazione del veicolo è data da a = (τ /m r); essa è quindi direttamente proporzionale alla
coppia motrice e inversamente proporzionale alla massa della vettura e al raggio della ruota.
b. Se consideriamo l’intero sistema carrozzeria più ruote, le uniche forze esterne sono le reazioni al
contatto col terreno, N1 = V1 , N2 = V2 , T1 = m a, T2 = 0. Quindi
b1. La forza esterna che fa accelerare il veicolo è T1 , ossia la forza di attrito col terreno. Sembra
a prima vista paradossale, visto che siamo abituati a pensare l’attrito come causa di smorzamento o cessazione del moto, ma dobbiamo ricordarci che qui si tratta di attrito statico,
che non compie lavoro ma dà al veicolo l’aderenza per accelerare. È noto che dove si ha poco
171
5.10.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
attrito fra ruote e terreno diventa difficile o impossibile far accelerare (o frenare, o sterzare)
un veicolo, perché le ruote motrici slittano.
b2. Perché si abbia aderenza sufficiente al rotolamento puro fra la ruota motrice e il terreno occorre che sia |T1 |/|N|1 ≤ µ, dove µ è il coefficiente di attrito statico fra ruota e terreno18 . Dalle
(5.10.12) vediamo che sulle ruote posteriori durante l’accelerazione grava una forza maggiore
della metà del peso del veicolo, per un fattore (a/g) ((h + r)/l), mentre sulle ruote anteriori
la forza è inferiore alla metà del peso per uno stesso fattore. Anche se avessimo connesso il
motore all’asse anteriore avremmo ottenuto, come è facile vedere, la stessa distribuzione delle
forze verticali. Il fattore di differenza è proporzionale al rapporto a/g, ossia all’accelerazione
del veicolo rispetto a quella di gravità, e da (h + r)/l, ossia il rapporto fra l’altezza del centro
di massa del veicolo da terra e la metà della distanza fra i due assi delle ruote. Nel caso di
auto da corsa, in categorie in cui l’accelerazione ha un ruolo preminente (si pensi per esempio ai cosiddetti dragster), per cui può essere19 a > g, questo fatto incoraggia fortemente,
insieme ad altre considerazioni tecniche, l’uso della trazione posteriore. Viceversa, in fase di
decelerazione, il peso grava maggiormente sull’asse anteriore e infatti i freni anteriori hanno
un ruolo preminente sui veicoli. Il fenomeno che abbiamo evidenziato ha effetti ancora più
spettacolari sulle moto di grossa potenza, dove il rapporto (h + r)/l è in genere maggiore che
per le auto: in fase di accelerazione il veicolo si può impennare facendo alzare dal terreno la
ruota anteriore. Sulle auto da corsa per migliorare l’aderenza delle ruote al terreno si fa largo
uso di alettoni o altre appendici aerodinamiche con effetto deportante, ossia tale da spingere
la vettura verso il basso, aumentando il valore delle forze normali N1 e N2 e quindi, a parità
di coefficiente d’attrito, la massima accelerazione o decelerazione del veicolo. Per le auto di
Formula 1 le forze normali, ad alte velocità, sono dovute maggiormente a questi dispositivi
che non al peso stesso. In questo modo viene aumentata anche la resistenza dell’aria all’avanzamento (che nel nostro modello semplificato abbiamo trascurato), ma resta comunque
un notevole vantaggio sul tempo di percorrenza del circuito.
5.11 Applicazione della conservazione dell’energia allo studio di moti
Vogliamo analizzare alcuni dei problemi già studiati precedentemente e altri nuovi utilizzando
la conservazione dell’energia meccanica.
5.11.1 Pendolo semplice e composto
In entrambi i casi l’energia meccanica si conserva e l’energia potenziale è quella della forza peso.
Nel caso del pendolo semplice, trattato in 3.9.4, l’energia potenziale vale V = −m g l cos ϕ. Se
abbandoniamo il pendolo da fermo con ϕ = ϕ0 avremo
1 2 2
m l ϕ̇ − m g l cos ϕ = −m g l cos ϕ0
2
⇒
ϕ̇2 =
2g
(cos ϕ − cos ϕ0 )
l
(5.11.1)
ossia la (3.9.29).
Nel caso del pendolo composto, trattato in 4.11.2, l’energia potenziale della forza peso si può
calcolare considerando tutta la massa concentrata nel centro di massa, per cui V = −m g h cos ϕ.
18
19
In condizioni ottimali per uno pneumatico su asfalto secco µ può raggiungere valori dell’ordine di 1.
Per auto di Formula 1 abbiamo, per velocità inferiori a 200 km/h, a/g � 1.5.
5.11.1
172
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
L’energia cinetica del pendolo vale, per la (5.7.6), T = (1/2)(IG + m h2 ) ϕ̇2 Avremo quindi
1
(IG + m h2 ) ϕ̇2 − m g h cos ϕ = −m g h cos ϕ0
2
⇒
ϕ̇2 = g
2mh
(cos ϕ − cos ϕ0 ) (5.11.2)
IG + m h2
coerente con la (4.11.7).
5.11.2 Ruota che rotola lungo un piano inclinato
Il problema è stato trattato in 4.11.1. L’energia potenziale è quella della forza peso, calcolata in
base all’altezza del baricentro, V = −m g x sin α. L’energia cinetica è data dal teorema di König:
T = (1/2) (m ẋ2 + I ϕ̇2 ). Con le condizioni iniziali x(0) = 0, ẋ(0) = 0 abbiamo
1
m
2
�
1+
I
m r2
�
ẋ2 − m g x sin α = 0
⇒
ẋ2 =
2 g sin α
x
1 + mIr2
(5.11.3)
5.11.3 Sbarra vincolata a due guide
Si tratta del problema trattato in 4.11.3. Vogliamo prima di tutto studiare le posizioni di
equilibrio in presenza della molla, secondo quanto visto in 5.8.1. I vincoli sono ideali e le forze
conservative. Possiamo scrivere l’energia potenziale del sistema, data dalla somma dell’energia
della forza peso e quella della molla
V = m g l cos ϕ + 2 k l2 sin2 ϕ
(5.11.4)
Per trovare le posizioni di equilibrio uguagliamo a zero la derivata di V rispetto al parametro di
moto ϕ
�
dV
mg �
= 4 k l2 sin ϕ cos ϕ − m g l sin ϕ = 4 k l2 sin ϕ cos ϕ −
dϕ
4kl
(5.11.5)
Nella (5.11.5) abbiamo messo in evidenza il termine che contiene le dimensioni, 4 k l2 , lasciando
il resto dell’espressione adimensionale: il termine (m g)/(4 k l) = α è infatti un numero puro e
potremo convenientemente indicarlo con il simbolo α. Qualora sia possibile, è sempre conveniente
isolare la dipendenza dimensionale nelle espressioni di grandezze fisiche, andando poi a studiare
funzioni di numeri puri. Potremo infatti studiare l’equilibrio guardando dove si annulla la funzione
W = (dV /dϕ)/(4 k l2 ). Avremo
W =0
⇒
�
sin ϕ = 0
cos ϕ = α solo se α ≤ 1
(5.11.6)
La (5.11.6) coincide con la (4.11.10). Studiando l’energia potenziale possiamo anche determinare
quando le posizioni di equilibrio sono stabili o instabili. Per fare questo potremmo studiare il segno
della derivata seconda d2 V /dϕ2 nelle posizioni di equilibrio, ma in generale si può più convenientemente evitare di derivare ancora e studiare invece il segno di W (ossia, della derivata dell’energia
potenziale) intorno ai punti in cui si annulla. Consideriamo prima il caso α < 1. Il nostro intervallo
173
5.11.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
di interesse è 0 ≤ ϕ ≤ π/2; in esso W si annulla se ϕ = 0 oppure se ϕ = ϕ1 , dove ϕ1 = arccos α
(0 < ϕ1 < π/2). W è data dal prodotto di due funzioni, di cui studiamo separatamente il segno,
come si vede in tabella 5.11.1.
0
ϕ
ϕ1
sin ϕ
−
0
+
+
+
cos ϕ − α
+
+
+
0
−
W
−
0
+
0
V
�
min
❃
✱
−
max
�
Tab. 5.11.1: Studio del segno della derivata dell’energia potenziale e andamento dell’energia, con
α < 1.
Dal segno della derivata ricaviamo l’andamento crescente o decrescente dell’energia potenziale e
vediamo che si ha un minimo, con equilibrio stabile, in ϕ = 0, mentre la posizione ϕ1 corrisponde
a equilibrio instabile. Nel caso α > 1 W si annulla solo in ϕ = 0 e abbiamo
0
ϕ
sin ϕ
−
0
+
cos ϕ − α
−
−
−
W
+
0
V
❃
✱
−
max
�
Tab. 5.11.2: Studio del segno della derivata dell’energia potenziale e andamento dell’energia, con
α > 1.
In questo caso abbiamo solo la posizione di equilibrio in ϕ = 0, che risulta instabile. In fig. 5.11.1
è rappresentato l’andamento di V /(4 k l2 ), per diversi valori del parametro α. Nel caso α = 1
l’equilibrio in ϕ = 0 diventa instabile, ma la funzione è particolarmente “piatta” nell’intorno del
punto, dato che si annullano anche le derivate seconda e terza rispetto a ϕ e sviluppando in serie
di potenze abbiamo V /(4 k l2 ) � 1 − ϕ4 /8.
Vogliamo studiare anche il moto del sistema utilizzando la conservazione dell’energia. Sappiamo
che il centro di massa della sbarra si muove lungo una circonferenza di centro O e raggio l, per cui
risulta T = (1/2) (I + m l2 ) ϕ̇2 . La conservazione dell’energia risulta
1
(I + m l2 ) ϕ̇2 + m g l cos ϕ + 2 k l2 sin2 ϕ = E
2
(5.11.7)
dove E, l’energia meccanica costante, si calcola in base alle condizioni iniziali. Se k = 0 la (5.11.7)
coincide con la (4.11.14).
Possiamo infine calcolare dalla (5.8.11) il periodo delle piccole oscillazioni del sistema intorno a
ϕ = 0 quando α < 1. Abbiamo
4
A(0) = I + m l = m l2
3
2
5.11.3
�
�
�
d2 V ��
1
2
= 4kl − mgl = mgl
−1
dϕ2 �ϕ=0
α
174
(5.11.8)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
2.0
V/4kl2
α=2
1.5
1.0
α=1
α = 0.8
0.5
α = 0.5
α = 0.1
-0.5
0.5
1.0
ϕ
1.5
Fig. 5.11.1: Grafico dell’energia potenziale del problema 5.11.3, per vari valori del parametro α. I
punti in rosso rappresentano le posizioni di equilibrio instabile per α < 1.
da cui
3
ω =
4
2
�
�
1
g
−1
α
l
⇒
T = 2π
�
4l
�
3 α −1 g
�1
(5.11.9)
5.11.4 Pendolo su carrello mobile
Vogliamo studiare un sistema meccanico analogo al pendolo composto visto in 4.11.2, ma con
una variazione sostanziale: il pendolo non è più imperniato con asse orizzontale fisso. L’asse a cui
è imperniato il pendolo, infatti, è solidale con un carrello rigido che può muoversi lungo una guida
orizzontale senza attrito, con velocità nello stesso piano di oscillazione del pendolo. Il carrello ha
massa m1 e centro di massa G1 , che supponiamo essere sulla verticale dell’asse del pendolo. Il
pendolo ha massa m2 , centro di massa G2 a distanza h dall’asse di sospensione, momento d’inerzia
rispetto a un asse parallelo a quello di sospensione e passante per G2 pari a IG .
Le velocità di tutti i punti del sistema hanno componenti in un unico piano verticale, per cui
possiamo studiare il moto come piano. Fissiamo un sistema di riferimento cartesiano con l’asse
X orizzontale passante per l’asse di sospensione del pendolo e l’asse Y in direzione della verticale
ascendente. Il punto C che individua l’intersezione dell’asse di sospensione con il piano XY si
muoverà lungo l’asse delle ascisse. Il sistema ha due gradi di libertà: il carrello può scorrere lungo
la guida orizzontale, e la sua posizione è nota se si conosce l’ascissa x1 del suo centro di massa G1 ,
che coincide con quella di C; una volta fissata la posizione del carrello, il pendolo può oscillare
indipendentemente intorno al suo asse di sospensione, e la posizione di ogni suo punto può essere
determinata attraverso l’angolo ϕ formato dalla congiungente CG2 con la verticale discendente.
Le coordinate del centro di massa del pendolo sono (G2 − O) = (x + h sin ϕ) i − h cos ϕ j.
Da un punto di vista dinamico notiamo che le forze esterne agenti sul sistema sono le forze peso
e le reazioni vincolari esercitate dalla guida che sostiene il carrello. Tutte queste forze risultano
verticali, per cui sul sistema la risultante delle forze esterne in direzione orizzontale è nulla. Si
conserva quindi la componente orizzontale Px della quantità di moto del sistema. Avremo
Px = m1 ẋ + m2 (ẋ + h cos ϕ ϕ̇) = (m1 + m2 ) ẋ + m2 h cos ϕ ϕ̇ = cost.
175
(5.11.10)
5.11.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
y
O
C
x
h
ϕ
G2
m 2g
G1
Fig. 5.11.2: Pendolo composto imperniato su un carrello mobile, libero di scorrere su una guida
orizzontale priva di attrito.
Specifichiamo le condizioni iniziali del moto che vogliamo studiare, dicendo, ad esempio, che ci
interessa il moto del sistema quando esso è inizialmente fermo, ossia ẋ(0) = ϕ̇(0) = 0, e viene
abbandonato con x(0) = 0 e il pendolo che forma un angolo ϕ(0) = ϕ0 . Con queste condizioni
iniziali risulta Px = 0, per cui integrando rispetto al tempo si ha
(m1 +m2 ) (x(t)−x(0))+m2 h (sin ϕ(t)−sin ϕ(0)) = 0
⇒
(m1 +m2 ) x+m2 h sin ϕ = m2 h sin ϕ0
(5.11.11)
La (5.11.11) rappresenta una relazione dinamica fra i parametri di moto, dovuta alla conservazione della quantità di moto orizzontale. Consideriamo adesso il sistema dal punto di vista dell’energia
meccanica: i vincoli sono ideali e le forze conservative, per cui essa si conserva. L’energia potenziale
del sistema è quella della forza peso; il centro di massa del carrello si muove sempre solo in direzione orizzontale, per cui l’energia potenziale del carrello rimane costante e si può non considerare.
Resta l’energia potenziale del pendolo, data da
V = −m2 g h cos ϕ
(5.11.12)
La conoscenza dell’energia potenziale basta a trarre alcune conclusioni sul moto del sistema:
a. V ha un minimo per ϕ = 0 e un massimo per ϕ = π. Le due configurazioni sono di equilibrio,
rispettivamente stabile e instabile.
b. Le condizioni iniziali del moto sono T (0) = 0 (il sistema parte da fermo) e V (0) = −m2 g h cos ϕ0 .
Durante il moto quindi dovrà essere sempre V (t) ≤ V (0), il che implica cos ϕ ≥ cos ϕ0 L’angolo
ϕ0 da cui viene abbandonato il pendolo è compreso nell’intervallo 0 ≤ ϕ0 < π (se ϕ0 = π il
sistema rimane in equilibrio). Ne segue che il moto è confinato nell’intervallo −ϕ0 ≤ ϕ ≤ ϕ0 .
La simmetria del sistema intorno a ϕ = 0 ci porta a concludere che il moto sarà oscillatorio,
suddiviso in quattro tratti in cui si avranno condizioni di angolo e velocità angolare speculari,
come descritto per il pendolo semplice in 3.9.4, ma la presenza del carrello ci fa pensare che
l’equazione di moto per il parametro ϕ sarà diversa da quella per un pendolo.
c. La conservazione della quantità di moto data dalla (5.11.11) consente di determinare la posizione
5.11.4
176
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
del carrello sulla guida durante il moto in funzione dell’angolo ϕ del pendolo:
x=
m2 h
(sin ϕ0 − sin ϕ)
m1 + m2
(5.11.13)
Se ϕ0 < π/2 il carrello comincerà a muoversi verso destra e raggiungerà il massimo valore di x
per ϕ = −ϕ0 , dato da xmax = 2 m2 h sin ϕ0 /(m1 + m2 ). Avremo quindi nel moto 0 ≤ x ≤ xmax
e xmax rappresenta l’ampiezza dell’intervallo in cui varia x. Se invece ϕ0 > π/2 nella prima
parte del moto, mentre l’angolo decresce da ϕ0 a π/2, sin ϕ aumenta e quindi x si sposta verso
sinistra, raggiungendo il valore minimo per ϕ = π/2: xmin = m2 h (sin ϕ0 − 1)/(m1 + m2 ) < 0.
Dopo che ϕ ha raggiunto π/2, seguitando a diminuire, il carrello si muove verso destra fino a
che si raggiunge la configurazione con ϕ = −π/2; questa corrisponde al massimo valore di x:
xmax = m2 h (sin ϕ0 + 1)/(m1 + m2 ). Nell’ultimo tratto del semi–periodo ϕ decresce fino a −ϕ0 ,
mentre il carrello si muove verso sinistra. Il carrello quindi si muove in un intervallo di ampiezza
2 m2 h/(m1 + m2 ).
Possiamo proseguire nello studio del moto scrivendo l’energia cinetica del sistema
�
� 1
1
1
m1 ẋ2 + m2 (ẋ + h cos ϕ ϕ̇)2 + h2 sin2 ϕ ϕ̇2 + IG ϕ̇2 =
2 �
2 �
2
1
m21
1
=
m1 +
ẋ2 + (IG + m2 h2 sin2 ϕ) ϕ̇2 =
2
m2
2
�
2 �
1
2 m1 + m2 sin ϕ
=
IG + m2 h
ϕ̇2
2
m1 + m2
T =
(5.11.14)
Fra il primo e il secondo passaggio si è sfruttata l’uguaglianza m2 (ẋ + h cos ϕ ϕ̇) = −m1 ẋ che
risulta dalla (5.11.10), nell’ultimo passaggio si è usata ancora la (5.11.10) per eliminare ẋ e scrivere
T solo in funzione di ϕ e ϕ̇. Questa forma è opportuna perché consente di scrivere la conservazione
dell’energia in funzione di un solo parametro di moto
�
�
1
m1 + m2 sin2 ϕ
IG + m2 h2
ϕ̇2 − m g h cos ϕ = −m g h cos ϕ0
2
m1 + m2
⇒
ϕ̇2 =
⇒
(5.11.15)
2 m g h (cos ϕ − cos ϕ0 )
IG + m2 h2
m1 +m2 sin2 ϕ
m1 +m2
La (5.11.15) consente di calcolare la velocità angolare del pendolo in funzione della posizione. È
molto istruttivo analizzare i casi limite di moto che si hanno al variare di m1 :
a. m1 → ∞. Il secondo termine in parentesi quadra nell’espressione dell’energia cinetica in
(5.11.15) tende al valore m2 h2 , dato che la frazione tende a 1. L’equazione di moto allora
coincide con quella di un normale pendolo composto, (4.11.7), il cui asse di sospensione è fisso. Il motivo fisico è abbastanza evidente: se m1 → ∞ la conservazione della quantità di
moto orizzontale impone che il carrello resti fermo, come si vede anche dalla (5.11.13) in cui
corrispondentemente x → 0.
b. m1 → 0. In questo caso l’energia cinetica del pendolo diventa T = (1/2) [IG + m2 h2 sin2 ϕ] ϕ̇2 .
In queste condizioni il carrello si limita a mantenere l’asse di sospensione del pendolo a una quota
fissa, ma non può applicare al pendolo una reazione vincolare in direzione orizzontale, perché
177
5.11.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
altrimenti acquisterebbe un’accelerazione orizzontale infinita. In pratica, tutto va come se l’asse
del pendolo, invece di essere fissato su un carrello, potesse scorrere liberamente su una guida
orizzontale senza attrito che applica una reazione solo in direzione verticale (vedi fig. 5.11.3).
y
V
C
O
x
h
G2
ϕ
m 2g
Fig. 5.11.3: Pendolo composto il cui asse di sospensione può scorrere liberamente lungo una guida
orizzontale. Le forze esterne applicate sono solo la forza peso e la reazione della guida, entrambe verticali,
per cui il centro di massa G2 mantiene immutata la sua ascissa e si muove solo in verticale, lungo la
linea disegnata in rosso.
In questo caso le forze esterne agenti sul pendolo sono soltanto verticali, per cui, se il sistema
parte da fermo, l’ascissa xG2 = x + h sin ϕ del centro di massa G2 non varia e rimane al valore
iniziale h sin ϕ0 . La velocità del centro di massa è solo verticale e vale h sin ϕ ϕ̇ j, da cui risulta
l’energia cinetica trovata sopra.
Si potrebbe integrare ulteriormente l’equazione di moto per separazione delle variabili, ottenendo
un’espressione analoga alla (3.9.30), ma più complicata, che può essere integrata solo per approssimazione numerica. In fig. 5.11.4 è riportato l’andamento di ϕ(t) e x(t), per valori particolari degli
elementi caratterizzanti il sistema, ricavato appunto dal calcolo numerico approssimato.
ϕ [rad]
2
π/2
1
0.5
1.0
1.5
2.0
2.5
3.0
1.0
1.5
2.0
2.5
3.0
t [s]
1
−π/2
2
0.5
x [m]
0.4
0.3
0.2
0.1
0
0.5
t [s]
-0.5
Fig. 5.11.4: Andamento dei parametri di moto per un’oscillazione del pendolo su carrello mobile,
con m1 = 2 kg, m2 = 1 kg, IG = 0.33 kg · m2 , h = 1 m, g = 9.81 m · s−2 , ϕ0 = (3/4) π.
5.11.4
178
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
5.11.5 Disco rotolante in una guida circolare che ruota con velocità angolare costante
Vogliamo studiare il moto di un disco di massa m e raggio r che è vincolato a rotolare senza
strisciare entro una guida semicircolare di raggio R, rimanendo nel piano verticale della guida. La
guida a sua volta ruota intorno a un asse verticale con velocità angolare ω costante, mantenuta
da un opportuno dispositivo. Vogliamo studiare le posizioni di equilibrio del disco e trovare la sua
equazione di moto.
z
a)
z
b)
O
ω
x
y
R
O
θ
C
r
x
ϕ
P
C
Fig. 5.11.5: Un disco di massa m e raggio r è vincolato a rotolare senza strisciare lungo una guida
semicircolare di raggio R disposta in un piano verticale, mantenendosi in detto piano. La guida a sua
volta ruota con velocità angolare ω costante intorno ad un asse verticale passante per il suo centro O.
Il problema è stato affrontato da un punto di vista cinematico in 2.12. Scegliamo un sistema di
riferimento cartesiano con l’origine nel centro della guida, l’asse X lungo il diametro orizzontale
di essa, l’asse Z verticale e l’asse Y disposto a formare una terna destrorsa. La velocità angolare
con cui ruota la guida sarà ω = ω k Il fatto che il piano in cui si trovano la guida e il disco ruoti
intorno a un asse verticale non cambia le condizioni di moto nel piano stesso. In esso avremo
quindi un solo grado di libertà; useremo ancora gli angoli θ e ϕ per esprimere la configurazione del
sistema, non indipendenti ma legati fra loro dalla relazione cinematica (2.12.7), (R − r) θ = −r ϕ,
con opportuna scelta del punto P usato per parametrizzare la rotazione del disco.20
Da un punto di vista dinamico, il disco che vogliamo studiare è sottoposto alla forza peso,
conservativa, e alle reazioni vincolari. Il vincolo di rotolamento puro rispetta la conservazione
dell’energia meccanica e supponiamo gli altri vincoli ideali.21 Studieremo il moto nel sistema
rotante: vale quanto abbiamo visto in 5.9 e a ciascun elemento di massa dm del disco corrisponderà
un’energia potenziale centrifuga
1
dVcf g = − dm ω 2 x2
2
(5.11.16)
All’intero disco corrisponderà un’energia potenziale centrifuga
Vcf g
20
21
�
1 2
1
1
=− ω
x2 dm = − ω 2 Iz = − ω 2 [ICz + m (R − r)2 sin2 θ] =
2
2
2
disco
1 2
= − ω m (R − r)2 sin2 θ + cost.
2
(5.11.17)
Il fatto di aver scelto gli assi in modo diverso da quanto fatto in 2.12 non altera la relazione cinematica.
Per mantenere il disco nel piano XZ durante il moto sarà necessario che il vincolo applichi ad esso forze in direzione
Y . Un modo di realizzare un vincolo del genere sarebbe quello di costruire la guida con una sezione a “U”, cosı̀ che
i bordi laterali impedirebbero al disco di uscire dal piano.
179
5.11.5
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Infatti l’integrale che compare è il momento d’inerzia del disco rispetto all’asse Z, che viene scomposto secondo il teorema di Huygens–Steiner come somma del momento rispetto a un asse parallelo
passante per il centro di massa, ICz , più il termine dato dalla massa per il quadrato della distanza
fra gli assi. Il termine con ICz è costante e quindi non è fisicamente significativo. In pratica abbiamo dimostrato che in questo caso l’energia potenziale centrifuga si può calcolare come se tutta
la massa del corpo rigido fosse concentrata nel suo centro di massa.22 . Oltre all’energia potenziale
centrifuga avremo quella delle forze peso, che scriveremo come Vp = m g zc . In totale avremo per
l’energia potenziale
�
�
1
V = −m g (R − r) cos θ + ω 2 (R − r)2 sin2 ϕ = −m g (R − r) (cos θ + α sin2 θ)
2
(5.11.18)
dove abbiamo introdotto la costante adimensionale α = (R − r) ω 2 /(2 g). Possiamo studiare le
posizioni di equilibrio come abbiamo fatto in 5.11.3, studiando l’annullamento e il segno di dV /dϕ
e troviamo
dV
= m g (R − r) sin ϕ (1 − 2 α cos ϕ)
dϕ
(5.11.19)
Per l’equilibrio risulta
α <
α>
1
2
eq. stabile in θ = 0
1
2
eq. instabile in θ = 0 e stabile in θ = ±θ0 con cos θ0 =
(5.11.20)
1
2α
Il risultato è del tutto plausibile, visto che α ∝ ω 2 : per valori piccoli di α (e a maggior ragione se
α = 0, ossia se la guida non ruota) prevale la forza peso e l’unica posizione di equilibrio è nel punto
più basso, in θ = 0. Quando α supera il valore limite 1/2 prevale l’effetto della forza centrifuga, per
cui l’equilibrio in θ = 0 diventa instabile e nascono due nuove posizioni di equilibrio simmetriche.
Per lo studio della dinamica scriviamo l’energia cinetica, utilizzando il teorema di König
1
1
1
1
(R − r)2 2
m (R − r)2 θ̇2 + IC ϕ̇2 = m (R − r)2 θ̇2 + IC
θ̇ =
2
2
r2
� 2
� 2
1
IC
= m (R − r)2 1 +
θ̇2
2
m r2
T =
(5.11.21)
dove IC è il momento d’inerzia del disco rispetto all’asse passante per il centro di massa e diretto
come la sua velocità angolare nel sistema mobile, −ϕ̇ j. Per un disco omogeneo sappiamo che
IC = (1/2) m r2 . Abbiamo usato la relazione cinematica fra θ e ϕ per esprimere l’energia cinetica
in funzione solo del primo parametro. Si noti la somiglianza dell’espressione trovata con l’energia
cinetica nella (5.11.3): in entrambi i casi abbiamo rotolamento puro e il termine dovuto alla
rotazione dà un contributo pari a quello del moto del centro di massa moltiplicato per il fattore
I/(m r2 ).
22
Abbiamo incontrato già diverse situazioni in cui una certa grandezza fisica relativa a un sistema si può calcolare
come se la massa fosse concentrata nel centro di massa, ma questo non autorizza a considerare il fatto una proprietà
generale da considerare valida a cuor leggero in ogni situazione.
5.11.5
180
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Possiamo scrivere l’equazione di moto imponendo la conservazione dell’energia
1
m (R − r)2
2
�
�
IC
1+
θ̇2 − m g (R − r) (cos θ + α sin2 θ) = E
m r2
(5.11.22)
Il valore dell’energia meccanica E si ricava di volta in volta dalle condizioni iniziali.
Può essere interessante studiare i moti possibili utilizzando il grafico dell’energia. Consideriamo
un caso in cui α = 0.8, per cui si ha equilibrio instabile in θ = 0 e stabile in θ = ± arccos(1/2α).
In fig. 5.11.6 è riportato il grafico dell’energia meccanica in funzione di θ, con α = 0.8. Se l’energia
è inferiore a E2 = V (0), come per E1 , il moto risulta oscillatorio e confinato tra due valori di θ
entrambi positivi o negativi, a seconda della posizione iniziale. Per E > V (0) si hanno oscillazioni
fra due valori di θ simmetrici rispetto allo zero. Nel caso E2 , in cui l’energia meccanica è esattamente V (0), il moto arriva in θ = 0, dove il disco si ferma e rimane finché la minima perturbazione
non lo rimette in moto.
-3.7
E [J]
V
-3.8
E3
-3.9
E2
-4.0
E1
-4.1
-4.2
-4.3
-1.5
-1.0
-0.5
0.0
θ [rad]
0.5
1.0
1.5
Fig. 5.11.6: Grafico dell’energia per il disco che rotola in una guida semicircolare su una piattaforma
rotante, con m = 1 kg, R = 0.5 m, r = 0.1 m, g = 9.81 m · s−2 , α = 0.8.
181
5.11.5
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
182
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
6.
Gravitazione
In questo capitolo trattiamo la forza di attrazione che si esercita fra ogni coppia di corpi e
che prende il nome di forza gravitazionale o gravitazione universale. La forza gravitazionale è
la prima delle quattro forze o interazioni fondamentali della fisica1 ed è stata introdotta da Sir
Isaac Newton alla fine del diciassettesimo secolo, più o meno contestualmente con le leggi della
meccanica. La seconda interazione fondamentale ad essere stata studiata sistematicamente è quella
elettromagnetica, durante il diciannovesimo secolo, a opera di numerosi scienziati, fra cui James
Clerk Maxwell, che ne sintetizzò le caratteristiche attraverso le leggi che vanno sotto il nome di
equazioni di Maxwell. Le ultime due interazioni, le cosiddette forza forte e forza debole, agiscono
fra le particelle che costituiscono i nuclei atomici e il loro studio risale al ventesimo secolo.
Gli elementi sperimentali su cui Newton si basò per stabilire la sua legge di gravitazione universale erano fondamentalmente due: da un lato la forza peso agente su tutti gli oggetti sulla Terra,
dall’altro il moto dei corpi celesti, dei pianeti del sistema solare allora conosciuti, ossia Mercurio,
Venere, Terra, Marte, Giove, Saturno, e dei loro satelliti, la Luna, i quattro satelliti di Giove scoperti da Galileo nel 1610, Io, Europa, Ganimede e Callisto, e dei satelliti che qualche decennio più
tardi Huygens e Cassini scoprirono intorno a Saturno.
In particolare, l’astronomo danese Tycho Brahe (1546–1601) aveva raccolto una grande quantità
di osservazioni sul moto dei pianeti del sistema solare, che passarono al suo assistente, il tedesco
Johannes Kepler (1571–1630), noto nel nostro paese come Keplero. Keplero dedicò più di un
decennio allo studio dei dati e fra il 1609 e il 1619 pubblicò le sue leggi sul moto dei pianeti, che
costituirono l’elemento fondamentale su cui Newton poté basarsi per la sua gravitazione universale.
6.1 Le leggi di Keplero
Diamo di seguito l’enunciato delle tre leggi sul moto dei pianeti:
I
I pianeti si muovono su orbite ellittiche, di cui il Sole occupa uno dei
fuochi.
II Il segmento che collega il Sole con il pianeta spazza aree uguali in
tempi uguali.
III Il rapporto fra il cubo dell’asse maggiore dell’orbita e il quadrato del
periodo di rivoluzione è lo stesso per tutti i pianeti che orbitano intorno al Sole.
Le tre leggi valgono con buona approssimazione, ma non sono rispettate del tutto rigorosamente,
1
Una delle aspirazioni della fisica moderna è di raggiungere quella che si chiama l’unificazione delle forze, ossia la
possibilità di spiegare tutte le interazioni attraverso un’unica teoria. Sono stati fatti passi in questa direzione, ma
preferiamo proporre qui le forze fondamentali come separate.
183
6.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
in quanto
– Esse considerano il Sole come fermo. Ciò è vero solo, come vedremo nel seguito, se consideriamo
le masse dei pianeti trascurabili rispetto a quella del Sole. Fra i pianeti Giove, che ha la massa
più grande, è quello che si discosta maggiormente dalle leggi di Keplero.
– Si trascura l’interazione che i pianeti hanno fra loro e con i loro satelliti. L’interazione diretta
fra i diversi pianeti è evidentemente molto inferiore a quella con il Sole, sempre per le rispettive
masse, ma va notato, ad esempio, che i pianeti più esterni sono stati “predetti”, prima di essere
effettivamente osservati, dallo studio delle perturbazioni che inducono sull’orbita dei pianeti
interni.
– Per il pianeta Mercurio il moto risente anche, in modo misurabile, del fatto che si avvicina ai
limiti di validità della meccanica classica e che si deve tener conto degli effetti della Relatività
Generale.
Va notato anche che nelle leggi di Keplero si trascurano le dimensioni del Sole e dei pianeti
rispetto alle rispettive distanze, considerando i corpi come punti materiali. Tuttavia questo, come
vedremo nel seguito, ha effetti solo nella misura in cui i corpi celesti non si possono considerare
sfere con distribuzione di massa simmetrica, in quanto dimostreremo che la forza gravitazionale
complessiva prodotta da tali oggetti equivale a quella che si avrebbe se la massa fosse concentrata
nel centro della sfera.
ur
a)
r
Pp
ϕ
S
FP
H
b)
r+
dϕ
Pa
dr
P2
P1
r
S
Fig. 6.1.1: a) Orbita ellittica di un pianeta P intorno al Sole S; è rappresentato anche l’altro fuoco dell’ellisse. È
disegnata anche la forza agente sul pianeta, diretta verso il Sole, e sono riportati i punti di afelio Pa e perielio Pp,
ossia i punti dove il pianeta ha, rispettivamente, la massima e la minima distanza dal Sole. L’eccentricità dell’orbita
è esagerata per evidenziare la forma ellittica. b) Il pianeta compie uno spostamento infinitesimo sull’orbita da P1
a P2 : sono evidenziati gli elementi per il calcolo della velocità areolare.
La prima legge implica che il moto di ciascun pianeta è confinato in un piano e che quindi il
momento angolare del pianeta ha direzione fissa, perpendicolare al piano dell’orbita. Se infatti
indichiamo con P e S i punti che individuano la posizione del pianeta e del Sole, rispettivamente,
avremo per il momento angolare L = (P − S) × m v, dove m e v sono, rispettivamente, la massa
e la velocità del pianeta; se (P − S) e v sono in uno stesso piano fisso, come stabilisce la legge, L
sarà sempre diretto perpendicolarmente al piano.
La seconda legge implica che il momento angolare del pianeta è una costante del moto. Possiamo
infatti studiarlo in un sistema avente l’origine nel Sole e l’asse X passante per i due fuochi, come
in fig. 6.1.1. Usando le coordinate polari abbiamo
L = r ur × m (ṙ ur + r ϕ̇ uϕ ) = m r2 ϕ̇ k
(6.1.1)
D’altra parte, come si vede in fig. 6.1.1 b, se il pianeta in uno spostamento infinitesimo sull’orbita
6.1
184
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
effettuato in un tempo dt si sposta da P1 a P2 , l’area spazzata è quella del triangolo SP1 P2 , data
da dA = (1/2) SP2 · P1 H = (1/2) (r + dr) r sin dϕ = (1/2) r2 dϕ, dove l’ultima eguaglianza vale a
meno di infinitesimi di ordine superiore al primo. Abbiamo quindi
dA =
1 2
r dϕ
2
A = Ȧ =
⇒
1 2
r ϕ̇
2
(6.1.2)
A è quella che si chiama velocità areolare e la seconda legge stabilisce che è costante. Dal confronto
della (6.1.2) con la (6.1.1) si ricava immediatamente che ciò implica la costanza di L, calcolato
usando il Sole, fisso, quale centro di riduzione. Le leggi della dinamica ci fanno concludere che
all’accelerazione del pianeta lungo la traiettoria curva percorsa a velocità non uniforme corrisponda
una forza F non nulla ad esso applicata. La costanza di L permette di ricavare
L̇ = 0
⇒
τ = (P − S) × F = 0
⇒
F = −F ur
(6.1.3)
Infatti se τ = 0 o è nullo il modulo di almeno uno dei fattori del prodotto vettoriale, il che
risulta impossibile, oppure la forza è nella stessa direzione del vettore posizione. Sapendo che
l’accelerazione è sempre diretta verso il lato concavo della traiettoria (vedi 2.7.1), dalla seconda
legge della dinamica si ricava che la forza agente sul pianeta è diretta verso il Sole, ed è pertanto
una forza attrattiva.
Alla luce del terzo principio della dinamica la direzione della forza è coerente con un’interazione
fra il Sole e il pianeta. Vogliamo calcolare adesso dalle leggi di Keplero l’entità della forza.
6.2 Derivazione approssimata della forza gravitazionale per orbite circolari
Una derivazione rigorosa dell’entità della forza gravitazionale a partire dalle leggi di Keplero
risulta abbastanza laboriosa, per cui preferiamo affrontare prima il problema nel caso particolare
di orbite circolari.
a)
b)
"
!
!
#
$
&
%
!
Fig. 6.2.1: Grafici in scala delle orbite dei pianeti del sistema solare noti all’epoca di Newton. Per
facilitare il confronto, le orbite sono proiettate sullo stesso piano e disegnate con gli assi allineati fra loro.
In a) l’intero gruppo di 6 pianeti: ogni divisione della scala equivale a 108 km. In b) è ingrandita la zona
dei pianeti più vicini al Sole: ogni divisione della scala equivale a 2 · 107 km.
185
6.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
In fig. 6.2.1 sono riportate in scala le orbite dei sei pianeti noti all’epoca di Newton. Esse
risultano abbastanza simili a dei cerchi. Il parametro � di eccentricità, che misura la differenza di
forma fra un ellisse ed un cerchio ed è definito come � = (ra − rp )/(ra + rp ) dove ra e rp sono le
distanze Sole–pianeta rispettivamente all’afelio e al perielio, risulta < 0.1 per tutti i pianeti salvo
Mercurio, la cui orbita ha � = 0.2 (la differenza da un cerchio è chiaramente visibile in figura). Per
questo motivo studiare il caso dell’orbita circolare può avere anche un senso pratico.
Se consideriamo un’orbita circolare, per la seconda legge di Keplero essa dovrà essere percorsa
con velocità angolare ϕ̇ costante. L’accelerazione del moto risulta ovviamente diretta verso il
centro, perpendicolarmente alla traiettoria, ed è data banalmente dalla (2.7.6), per cui la forza di
attrazione F vale
F = −m ϕ̇2 r ur
(6.2.1)
La terza legge di Keplero per l’orbita circolare diventa
r3
=C
T2
dove T =
2π
2π
=
ω
ϕ̇
⇒
ϕ̇2 =
4π 2 C
r3
(6.2.2)
Sostituendo il valore di ϕ̇2 della (6.2.2) nella (6.2.1) si ottiene
F = −4π 2 C
m
ur
r2
(6.2.3)
C è una costante che ha lo stesso valore per il moto di tutti i pianeti, per cui la forza esercitata su
ogni pianeta risulta inversamente proporzionale al quadrato della sua distanza dal Sole.
Considerando orbite ellittiche, è possibile confrontare in modo abbastanza facile le forze che si
esercitano su un pianeta quando questo si trova all’afelio e al perielio. In questi particolari punti
abbiamo le seguenti condizioni:
a. la distanza r fra il pianeta e il Sole ha un massimo o un minimo e quindi ṙ = 0.2 Ne segue che
la velocità del pianeta è data da v = r ϕ̇ uϕ .
b. La normale alla traiettoria coincide con la direzione della congiungente il Sole col pianeta.
L’accelerazione del pianeta risulta quindi normale alla traiettoria e vale a = v 2 /ρ, dove ρ è il
raggio di curvatura dell’ellisse nel punto, da non confondersi con r, la distanza pianeta–Sole. Il
raggio di curvatura, per la simmetria dell’ellisse attorno al suo centro, è uguale all’afelio e al
perielio.
Avremo quindi per le intensità delle forze Fa all’afelio e Fp al perielio, tenendo conto che la
velocità areolare A = (1/2) r2 ϕ̇ è costante in ogni punto della traiettoria
r2 ϕ̇2
Fa = m aρ a
Fp = m
rp2 ϕ̇2p
ρ
⇒
4 A2
Fa = m ρ
F = m 4 A2
p
ρ
1
2
ra
1
rp2
(6.2.4)
Le forze all’afelio e al perielio sono dunque inversamente proporzionali ai quadrati delle distanze
Sole–pianeta.
2
Se pensiamo la traiettoria espressa nella forma r = r(ϕ) avremo in generale ṙ = (dr/dϕ) ϕ̇. Segue che dove la
distanza è massima o minima, e quindi (dr/dϕ) = 0, risulta ṙ = 0.
6.2
186
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
6.3 Calcolo della forza gravitazionale per le orbite ellittiche
Presentiamo qui il calcolo dell’intensità della forza attrattiva in ogni punto della traiettoria
ellittica. Innanzitutto, dobbiamo studiare le proprietà di questa curva.
6.3.1 Proprietà dell’ellisse
Dati due punti F1 e F2 , detti fuochi, distanti fra loro 2d, e un piano passante per essi, si definisce
l’ellisse come il luogo geometrico dei punti P del piano3 per cui la somma delle distanze dai due
fuochi ha un valore dato 2a costante: PF1 + PF2 = 2a.
y
r
A
ϕ
F1
P
b
O H
a
F2
B x
Fig. 6.3.1: Ellisse in un sistema di coordinate cartesiane.
Osserviamo immediatamente che deve essere a > d: in generale infatti i punti dell’ellisse non
staranno sulla retta passante per i fuochi e quindi avremo per ogni punto un triangolo PF1 F2 ; una
nota proprietà dei triangoli stabilisce che la lunghezza di un lato è sempre minore della somma delle
lunghezze degli altri due, da cui la condizione. Nel caso limite a = d si vede facilmente che il luogo
geometrico si riduce al segmento di retta F1 F2 . Si vede inoltre che l’ellisse risulta simmetrico
rispetto al punto mediano del segmento F1 F2 . Per questo motivo è consuetudine studiarlo in
un sistema di coordinate cartesiane avente l’origine O in detto punto, l’asse X diretto lungo la
congiungente dei fuochi e l’asse Y perpendicolare, nel piano della curva (vedi fig. 6.3.1). In questo
sistema risulta evidente che se (x0 , y0 ) è un punto dell’ellisse, anche i punti (x0 , −y0 ), (−x0 , y0 ) e
(−x0 , −y0 ) si trovano sulla curva.
Possiamo trovare l’equazione dell’ellisse in coordinate cartesiane considerando un suo punto
generico P ≡ (x, y) e scrivendo le lunghezze dei lati PF1 e PF2 per mezzo del teorema di Pitagora
applicato ai triangoli rettangoli PHF1 e PHF2 , dove H è la proiezione ortogonale di P sull’asse
X
�
�
(x + d)2 + y 2 + (x − d)2 + y 2 = 2a
(6.3.1)
Portando la seconda radice quadrata al secondo membro ed elevando entrambi i membri al quadrato
abbiamo
x2 + d2 + 2 x d + y 2 = 4a2 + x2 + d2 − 2 x d + y 2 − 4a
�
⇒ a2 − x d = a (x − d)2 + y 2
3
�
(x − d)2 + y 2
⇒
(6.3.2)
Se non si pone la limitazione sul piano il luogo geometrico è una superficie tridimensionale detta ellissoide.
187
6.3.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Elevando ancora al quadrato i membri
a4 +x2 d2 −2 a2 d x = a2 x2 +a2 d2 −2 a2 d x+a2 y 2
⇒
(a2 −d2 ) x2 +a2 y 2 = a2 (a2 −d2 ) (6.3.3)
Se introduciamo una nuova lunghezza b tale che b2 = a2 − d2 e dividiamo entrambi i membri della
(6.3.3) per a2 b2 otteniamo la forma canonica dell’equazione dell’ellisse
x2
y2
+ 2 =1
2
a
b
(6.3.4)
Se nella (6.3.4) poniamo x = 0 ricaviamo y = ±b, mentre se poniamo y = 0 abbiamo x = ±a.
I parametri a e b corrispondono quindi alle lunghezze, rispettivamente, del semiasse maggiore e
minore dell’ellisse.
Per i nostri scopi sarà utile l’equazione dell’ellisse in coordinate polari, centrate in un fuoco.
Scegliamo come origine delle coordinate polari F1 e esprimiamo la lunghezza PF2 utilizzando il
teorema di Carnot4 applicato al triangolo PF1 F2
r+
�
r2 + 4 d2 − 4 d r cos ϕ = 2a
⇒
�
r2 + 4 d2 − 4 d r cos ϕ = 2a − r
(6.3.5)
Elevando al quadrato entrambi i membri abbiamo
r2 + 4 d2 − 4 d r cos ϕ = 4 a2 + r2 − 4 a r
⇒
r=
a2 − d2
a − d cos ϕ
(6.3.6)
Vediamo che per ϕ = 0 r(0) = a+d e che per ϕ = π r(π) = a−d. Questi due valori costituiscono
la distanza rispettivamente massima e minima di P da F1 . È usuale scrivere la (6.3.6) utilizzando
i parametri p = (a2 − d2 )/a = b2 /a e � = d/a. In tal modo l’equazione dell’ellisse diventa
r=
p
1 − � cos ϕ
(6.3.7)
Il parametro � si chiama eccentricità dell’ellisse e corrisponde alla definizione di eccentricità data
in 6.2. Per un ellisse 0 < � < 1. Nel caso � = 0 l’ellisse diventa un cerchio, mentre per � = 1
la curva risulta una parabola.5 Si noti che la forma (6.3.7) dipende dal fatto di aver scelto come
centro delle coordinate F1 . Se avessimo scelto F2 , al denominatore avremmo avuto 1 + � cos ϕ (il
risultato si ottiene facilmente se si pensa che scambiare l’origine da un fuoco a un altro corrisponde
a ruotare il piano di π intorno a O; nel far questo ϕ → ϕ + π e cos(ϕ + π) = − cos ϕ).
Vogliamo infine calcolare l’area dell’ellisse. Il modo più semplice per farlo è di considerare
che se abbiamo una linea chiusa in un sistema cartesiano piano e operiamo una trasformazione
per cui tutte le ascisse dei punti risultano divise per un fattore a, l’area racchiusa dalla figura
risulterà anch’essa divisa per a. Se dividiamo tutte le ordinate per un fattore b, analogamente
l’area risulterà divisa per b. Se operiamo entrambe le trasformazioni l’area sarà divisa per a b. Nel
4
5
Vedi Appendice 1.
Vedi Appendice 4.
6.3.1
188
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
nostro caso operare le trasformazioni significa passare a nuove coordinate x� = x/a e y � = y/b:
2
2
corrispondentemente l’equazione dell’ellisse diventa x� + y � = 1, ossia l’equazione di un cerchio di
raggio unitario, avente area π. Con questo ragionamento l’area dell’ellisse risulta immediatamente
π a b.
6.3.2 Calcolo della forza gravitazionale
Abbiamo dimostrato in generale che la forza agente sul pianeta è diretta verso il fuoco, quindi
radiale in un sistema di riferimento in esso centrato. Corrispondentemente dalla (2.8.22) avremo
F = m aP = m (r̈ − r ϕ̇2 ) ur
(6.3.8)
Dobbiamo calcolare l’espressione in parentesi tonde della (6.3.8). Per farlo teniamo presente che
dalle (6.1.2) e (6.3.7) si ha
ϕ̇ =
1 =
r
con A = cost.
2A
r2
(6.3.9)
1−� cos ϕ
p
Deriviamo la seconda delle (6.3.9) rispetto al tempo, tenendo presente la prima
d
dt
� �
1
1
�
2 A � sin ϕ
= − 2 ṙ = sin ϕ ϕ̇ =
r
r
p
p
r2
⇒
ṙ = −
2A�
sin ϕ
p
(6.3.10)
Se deriviamo ancora rispetto al tempo ṙ ricavato dalla (6.3.10) abbiamo
r̈ = −
2A�
4 A2 � cos ϕ
cos ϕ ϕ̇ = −
p
p
r2
(6.3.11)
Inoltre si vede facilmente per il secondo termine in parentesi della (6.3.8) che r ϕ̇2 = 4 A2 /r3 . Si
ha quindi per l’accelerazione
r̈ − r ϕ̇2 = −
4 A2 � cos ϕ 4 A2
4 A2
− 3 =− 2
2
p
r
r
r
�
� cos ϕ 1
+
p
r
�
=−
4 A2 1
p r2
(6.3.12)
da cui
F = −m
4 A2 1
p r2
(6.3.13)
Resta da considerare la terza legge di Keplero, ricordando che, essendo A la velocità areolare
costante vale A T = π a b
a3
A2 a
A2
= 2 2 = 2 =C
2
T
π b
π p
189
⇒
A2
= π2 C
p
(6.3.14)
6.3.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
La (6.3.13) diventa infine
F = −4π 2 C
m
ur
r2
(6.3.15)
esattamente identica alla (6.2.3).
6.4 La legge della gravitazione universale. Massa inerziale e gravitazionale
Le espressioni identiche della forza esercitata sui pianeti del sistema solare (6.2.3) e (6.3.15) ci
fanno vedere che essa è direttamente proporzionale alla massa del pianeta attratto, inversamente
proporzionale al quadrato della distanza fra i corpi celesti e contiene una costante identica per ogni
pianeta e nota dalle misure astronomiche. Lo studio del moto dei satelliti di Giove aveva portato
a risultati analoghi, ma con una costante diversa, attribuibile al fatto che adesso il corpo attraente
è Giove invece del Sole.
È logico ipotizzare che le costanti dipendano da una caratteristica individuale del corpo attraente
e possiamo esplicitare l’ipotesi scrivendo il coefficiente 4 π 2 C come G MGS , dove G è un coefficiente
che vale per qualsiasi coppia di corpi attrattore–attratto e MGS è una nuova grandezza fisica che
corrisponde alla misura in cui il corpo attraente può esercitare la forza gravitazionale. Chiamiamo
questa grandezza massa gravitazionale e, per evitare confusioni con la grandezza fisica massa
che compare nel secondo principio della dinamica e abbiamo utilizzato nei capitoli precedenti,
chiamiamo quest’ultima massa inerziale. Possiamo quindi scrivere per un pianeta del sistema
solare l’intensità della forza su di esso esercitata dal Sole come
FP = G
miP MGS
r2
(6.4.1)
dove miP è la massa inerziale del pianeta e MGS è la massa gravitazionale del Sole. Se però
vogliamo considerare valido il terzo principio della dinamica dobbiamo considerare che anche il
pianeta eserciterà sul Sole una forza uguale in intensità e direzione e opposta in verso a FP . Se
facciamo l’ulteriore logica ipotesi che l’attrazione gravitazionale funzioni in modo simmetrico per
il Sole che attrae il pianeta e per il pianeta che attrae il Sole, dovremo scrivere l’intensità della
forza subita dal Sole come
FS = G
miS MGP
r2
(6.4.2)
Per il terzo principio della dinamica le forze devono essere uguali in intensità, da cui risulta
miP MGS = miS MGP
⇒
MGS
MGP
=
miS
miP
(6.4.3)
Con le nostre ipotesi le masse gravitazionali dei corpi che interagiscono risultano proporzionali alle
rispettive masse inerziali. Se il rapporto fra due grandezze fisiche è il medesimo, costante, per
qualsiasi corpo, è lecito considerarle come la stessa grandezza espressa in unità di misura diverse.
Avere introdotto una costante G nella formula ci consente di usare per la massa gravitazionale la
stessa unità di misura della massa inerziale e quindi, di fatto, ipotizzare l’uguaglianza delle masse
gravitazionali e inerziali: la costante G dovrà essere determinata sperimentalmente e servirà a tenere conto dei rapporti di “efficacia” con cui le masse agiscono a determinare l’inerzia e l’attrazione
gravitazionale fra i corpi.
6.4
190
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Possiamo infine scrivere, con le nostre ipotesi, la legge della gravitazione universale di Newton
nella forma
F = −G
m1 m2
ur
r2
(6.4.4)
dove m1 e m2 sono le masse dei due corpi (puntiformi o di dimensioni trascurabili rispetto alla
loro distanza), r è la distanza e ur è un versore nella direzione della congiungente i corpi e verso
che va dal corpo attraente al corpo attratto.
Va ancora sottolineato che mentre il processo che porta alla forma della forza (6.3.15) è una
pura deduzione dalle leggi sperimentali di Keplero, ottenuta considerando validi i principi della
meccanica di Newton, la (6.4.4) è a questo punto il frutto di ipotesi che devono essere verificate
sperimentalmente. Questo valeva a maggior ragione per Newton, che aveva appena stabilito i
principi della dinamica.
Un punto piuttosto sorprendente delle scoperte di Newton è il fatto che la proprietà con cui un
corpo risponde agli agenti che vogliono cambiarne la velocità sia la stessa per cui esercita una forza
attrattiva sugli altri corpi. Possiamo considerare, per esempio, la legge di Coulomb6 che stabilisce
una forza attrattiva o repulsiva fra gli oggetti in funzione della loro carica elettrica
F=k
q1 q2
ur
r2
(6.4.5)
Nella (6.4.5) q1 e q2 sono le quantità di carica elettrica presenti sui due corpi che interagiscono. La
carica elettrica è evidentemente una grandezza fisica che possiamo associare ai corpi, ma non ha
niente a che vedere con l’inerzia dei medesimi, anzi, non è neppure una proprietà intrinseca di un
corpo, dato che può essere trasferita da un corpo all’altro, mentre non possiamo modificare la massa
di un corpo se non modificando il corpo stesso, aggiungendovi o togliendovi materia.7 Newton si rese
ben conto dell’importanza fondamentale di questa proprietà e fece diversi esperimenti per verificare
l’identità delle masse inerziali e gravitazionali. Il modo più diretto di fare la verifica consiste nel
confrontare le forze con cui corpi diversi sono attratti dalla Terra, misurate staticamente con il
dinamometro, e le rispettive masse inerziali misurate con il metodo definito in 3.2. Le masse
gravitazionali si possono anche confrontare fra loro usando una bilancia a due piatti. Tuttavia
Newton, conscio dei limiti tecnologici del suo tempo, preferı̀ usare un metodo che gli dava risultati
con errori di misura inferiori. Costruı̀ un pendolo in cui il corpo oscillante era cavo e lo riempı̀
di materiali diversi. Se supponiamo che la massa inerziale mi e gravitazionale mg siano diverse,
avremo per le piccole oscillazioni (vedi 3.9.4)
mi l ϕ̈ = −mg g ϕ
⇒
� �
l
mi
T = 2π
g mg
(6.4.6)
Se le due masse sono fra loro proporzionali in ogni materiale i periodi non devono cambiare, e questo
fu il risultato di Newton. Esperimenti più precisi sono stati condotti in seguito, fra cui ricordiamo
quelli del fisico ungherese Loránd Eötvös (1848–1919) che occuparono lo scienziato dal 1885 al
1910. Essi vennero condotti confrontando con un apposito strumento gli effetti dell’attrazione
gravitazionale e della forza centrifuga da noi studiati in 3.11.1 e ebbero come risultato la coincidenza
6
7
L’esempio è valido per noi ma non per Newton, dato che la legge di Coulomb fu introdotta dal suo scopritore nel
1785, parecchi decenni dopo la morte del fondatore della meccanica.
Questo è vero nel contesto della fisica classica, mentre nella fisica relativistica la massa di un corpo dipende dal suo
stato di moto ed esiste una relazione di equivalenza fra massa e energia espressa dalla famosa legge E = m c2 .
191
6.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
delle masse a meno di una parte in 107 . Esperimenti successivi hanno verificato l’equivalenza a
meno di una parte in 1012 .
L’altro aspetto della gravitazione universale che può ancora meravigliare è proprio la sua “universalità”, ossia il fatto che la stessa forza che costringe i pianeti a orbitare intorno al Sole si
manifesti anche fra qualsiasi coppia di corpi su una scala di dimensioni molti ordini di grandezza
più piccola. Una misura diretta della forza gravitazionale fra due corpi in laboratorio fu eseguita
solo circa un secolo più tardi (vedi 6.5), ma Newton aveva a disposizione almeno una serie di dati
su cui operare una verifica sperimentale. Egli decise infatti di confrontare l’accelerazione di gravità
che agisce sui corpi alla superficie Terrestre con quella della Luna nella sua orbita. Newton era stato in grado di dimostrare che per una forza come quella gravitazionale da lui proposta l’attrazione
dovuta a una distribuzione di massa a simmetria sferica si poteva calcolare concentrando la massa
nel centro della sfera. Questo ci porta a scrivere per l’accelerazione di gravità g dei corpi in caduta
sulla superficie terrestre
g=
G mT
rT2
(6.4.7)
dove mT e rT sono rispettivamente la massa e il raggio della Terra. Se consideriamo l’orbita lunare
circolare l’accelerazione della Luna è quella centripeta data da
aL = ω 2 rT L =
4 π 2 rT L
T2
(6.4.8)
dove rT L è il raggio dell’orbita lunare e T il suo periodo. Questa accelerazione è dovuta alla forza
gravitazionale della Terra, per cui avremo
4 π 2 rT L
G mT
= 2
2
T
rT L
(6.4.9)
Ricavando G mT dalla (6.4.7) e sostituendo nella (6.4.9) si ottiene
4 π 2 rT3 L
=g
T 2 rT2
(6.4.10)
dove tutte le quantità sono misurabili ed erano note al tempo di Newton. Se calcoliamo il primo
membro della (6.4.10) con i valori attualmente noti, rT = 6371 km, rT L = 384 · 103 km, T =
23.7 giorni, otteniamo
4 π 2 (384 · 106 )3 m3
= 9.90 m · s−2
(23.7 · 24 · 3600)2 s2 (6.371 · 106 )2 m2
(6.4.11)
Il valore è diverso da quello noto di g (solo effetto gravitazionale) per poco più dell’1%. La differenza
si può attribuire a vari fattori, fra cui l’aver schematizzato l’orbita lunare come perfettamente
circolare e aver trascurato l’effetto gravitazionale sulla Luna dovuto al Sole e agli altri pianeti.
Quando Newton provò per la prima volta a fare questa verifica i dati sperimentali a sua disposizione
non erano corretti e non si ritenne soddisfatto. Solo quando nuovi dati gli fornirono un risultato
simile al nostro si decise a pubblicare, nel 1684, la sua teoria della gravitazione universale.
6.4
192
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
6.5 L’esperienza di Cavendish
Si deve allo scienziato inglese Henry Cavendish (1731–1810) la prima verifica diretta della legge
di gravitazione universale fra corpi in laboratorio. La fig. 6.5.1 riproduce lo schizzo originale di
Cavendish dove è mostrato l’apparato sperimentale usato.
Fig. 6.5.1: L’apparato usato da Cavendish per la misura della forza gravitazionale (disegno originale dell’autore).
L’apparecchio usato da Cavendish per misurare la forza è la cosiddetta bilancia di torsione, uno
strumento particolarmente adatto per la misura di forze di piccola entità.
y
a)
b)
M
Fg
m
ft
τel
M
ϕ
O
m
x
m
Fg
ϕ
M
m
M
Fig. 6.5.2: Schema della bilancia di torsione utilizzata da Cavendish per la misura della forza
gravitazionale. In a) la visione tridimensionale, in b) è rappresentato il piano di moto delle sfere.
Due sferette di piombo di massa m = 0.73 kg (e quindi di � 5 cm di diametro; vedi schema in
fig. 6.5.2) sono poste all’estremità di una bacchetta di legno lunga 2 l = 183 cm. La bacchetta è
attaccata a un filo di rame (argentato) sottile (ft in fig. 6.5.2a), con due ulteriori fili per mantenerla
orizzontale. Il filo di sospensione presenta elasticità di torsione: questo significa che la bacchetta
con le sferette ha una posizione di equilibrio nel piano orizzontale in cui giace (corrispondente
193
6.5
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
all’angolo ϕ = 0 in fig. 6.5.2 b); se si ruota la bacchetta di un angolo ϕ il filo, torcendosi, applica
un momento di forza di richiamo τ el = −E ϕ k dove k è il versore della verticale ascendente ed E
è una costante che dipende dalla lunghezza, dalla sezione e dal materiale del filo. In particolare, E
cresce se aumenta la sezione e diminuisce se aumenta la lunghezza. Due sfere di piombo di massa
M = 158 kg (e quindi di diametro � 30 cm) sono sorrette da un apposito sostegno, che permette
di avvicinarle e allontanarle rispetto alle sferette. Mentre le sfere grandi sono tenute ferme dal
loro sostegno, le sfere piccole possono muoversi sotto l’effetto dell’attrazione gravitazionale delle
grandi, che è contrastato solo dal momento di torsione del filo. Se in assenza dell’attrazione delle
sfere grandi la bacchetta stava in equilibrio con ϕ = 0, ora avrà una nuova posizione di equilibrio
che possiamo calcolare. Sia r la distanza fra il centro di una delle sfere piccole e quello della sfera
grande più vicina:8 su ciascuna sferetta agirà una forza Fg = G m M/r2 , che possiamo considerare
tangente alla circonferenza su cui avviene il movimento. Le forze di attrazione formano una coppia
con momento τ g = 2 Fg l k. All’equilibrio avremo, per la seconda cardinale applicata al sistema
bacchetta + sferetta, τ el + τ g = 0 da cui
2GmM l
−Eϕ=0
r2
⇒
ϕeq =
2GmM l
E r2
(6.5.1)
Se misuriamo l’angolo della posizione di equilibrio ϕeq , la distanza r fra i centri delle sfere e
conosciamo la costante di torsione E del filo possiamo ricavare il valore di G dalla (6.5.1), essendo
note le altre quantità. La determinazione di E si effettua mettendo il pendolo di torsione in
oscillazione e misurando il periodo, dopo aver allontanato le sfere grandi. In questo caso l’unico
momento di forza agente sul pendolo è quello di richiamo del filo di torsione e, se indichiamo con I
il momento d’inerzia della bacchetta e delle sferette rispetto all’asse coincidente con il filo abbiamo9
I ϕ̈ = −E ϕ
T = 2π
⇒
�
I
E
(6.5.2)
Misurato il periodo di oscillazione e il momento d’inerzia, dalla (6.5.2) si ricava E e quindi, dalla
(6.5.1), G.
Va ricordato che la forza di gravitazione universale è stata posta nella forma (6.4.4) solo molto
dopo l’epoca di Newton e Cavendish, per cui in realtà questi, con il suo esperimento, non si
proponeva tanto di ricavare il valore della costante G, quanto di pesare la Terra. Seguitando a
utilizzare la forma (6.4.4) e le relazioni che ne conseguono, che sono comunque equivalenti a quelle
usate da Cavendish, dalla (6.4.7), che esprime l’accelerazione di gravità g al suolo in funzione della
forza gravitazionale della Terra, abbiamo
mT =
g rT2
G
(6.5.3)
Determinato G, dalla (6.5.3) otteniamo la massa della Terra mT . Cavendish, come ogni fisico
sperimentale che si rispetti, prima di affrontare la misura di una grandezza di valore sconosciuto,
ha cercato di avere una qualche indicazione sull’ordine di grandezza della medesima, in modo da
poter progettare il suo apparato sperimentale con una ragionevole speranza di successo. Per dare
8
9
Non consideriamo l’attrazione su ciascuna sfera piccola dovuta alla sfera grande più lontana, ma il modulo della
forza risulta inferiore di circa due ordini di grandezza per la maggiore distanza, e l’angolo piccolo formato dalle forze
con la bacchetta dà luogo a un ulteriore riduzione nel momento delle medesime lungo l’asse verticale di rotazione.
Trascurando l’attrito, che comunque nel caso ha un effetto assolutamente minimale sul periodo di oscillazione.
6.5
194
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
una stima a priori della massa della Terra, e quindi dell’ordine di grandezza della forza di attrazione
che avrebbe dovuto misurare, Cavendish si basò sulla densità media dei materiali sulla superficie e
sulla parte più esterna della crosta terrestre (“esplorata” mediante le miniere). Tale densità veniva
valutata come � 2.7 · 103 kg · m−3 (ossia circa due volte e mezzo la densità dell’acqua). In realtà gli
strati centrali della Terra contengono elementi con densità maggiore, che portano la densità media
a un valore circa doppio. Se infatti usiamo la (6.5.3) per stimare G da una stima di mT , abbiamo
G = g rT2 /mT . Una sottostima di mT porta a una sovrastima di G, per cui Cavendish si aspettava
di dover misurare una forza di entità circa doppia di quella effettiva. Nonostante questo Cavendish
riuscı̀ a realizzare la sua misura, che si presentava comunque molto delicata. Si pensi che il periodo
del pendolo di torsione era dell’ordine di 20 minuti,10 per cui sarebbe stato estremamente poco
conveniente attendere che, una volta avvicinate le sfere grandi, l’attrito ne fermasse l’oscillazione
nella posizione di equilibrio: Cavendish ricavava questa dalla misura dei valori estremi raggiunti
da ϕ durante le oscillazioni del pendolo. Comunque, il periodo cosı̀ lungo rendeva la misura
sensibile a disturbi di qualunque genere, per cui Cavendish racchiuse tutto il suo apparato in una
scatola di legno (vedi fig. 6.5.1) ed effettuava i rilevamenti della posizione della sbarretta con le
sfere piccole (gli spostamenti erano dell’ordine di 4 mm) attraverso due cannocchiali che puntavano
scale graduate poste agli estremi della sbarretta, illuminate da apposite lampade. Il valore che si
ottiene per G dalle misure di Cavendish risulta G = 6.74·10−11 N·m2 ·kg−2 ; le misure più moderne
danno come risultato
G = (6.6738 ± 0.0008) · 10−11 N · m2 · kg−2
(6.5.4)
La misura ha un errore relativo di 1.2 · 10−4 e risulta una delle costanti della fisica note con minor
precisione.
La misura della forza gravitazionale fra due masse note in laboratorio permette di verificare
direttamente e compiutamente la (6.4.4) e stabilire la validità della gravitazione universale di
Newton.
6.6 Energia potenziale gravitazionale
La forza gravitazionale è una forza posizionale e si può dimostrare facilmente che essa è conservativa. Per farlo riutilizzeremo esattamente la procedura utilizzata in 5.5.3 per la forza elastica.
Supponiamo di avere due punti P1 e P2 soggetti all’attrazione gravitazionale. Indichiamo con ur
il versore di (P2 − P1 ). Usiamo per semplicità una sola costante k = G m1 m2 nell’espressione
della forza gravitazionale ed abbiamo
F1 =
k
r2
ur
F2 = − rk2 ur
(6.6.1)
dove r = |P2 − P1 |. Calcoliamo il lavoro dell’interazione gravitazionale quando i due punti si spostano dalla configurazione in si trovano, rispettivamente, nelle posizioni A1 , A2 alla configurazione
in cui le posizioni sono B1 , B2 . Consideriamo gli stessi spostamenti utilizzati in 5.5.3 e visualizzati
in fig. 5.5.2. Analogamente a quel caso, l’unico lavoro non nullo è compiuto da F2 durante lo
spostamento lungo la congiungente B1 B2 , mentre la distanza fra i punti va da quella iniziale rA ,
10
Per ottenere un angolo di deviazione apprezzabile si può aumentare la massa delle sfere piccole e diminuire il
coefficiente di richiamo E, fattori che portano entrambi a un allungamento del periodo di oscillazione.
195
6.6
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
rimasta invariata negli spostamenti precedenti, a quella finale rB .
L=
�
rB
−
rA
k
k
k
ur · dr ur =
−
2
r
rB
rA
⇒
Vgrav = −
k
r
(6.6.2)
Verifichiamo che l’espressione di Vgrav dedotta nella (6.6.2) è corretta calcolandone i gradienti
rispetto alle coordinate del primo e del secondo punto, che danno per risultato le (6.6.1). Abbiamo quindi dimostrato che l’interazione gravitazionale è conservativa e le corrisponde un’energia
potenziale inversamente proporzionale alla distanza fra i punti.
6.7 Forza gravitazionale di una distribuzione di massa a simmetria sferica
Molte delle osservazioni e degli esperimenti sulla forza di gravità che abbiamo visto si riferivano
a distribuzioni di massa a forma sferica. Vogliamo dimostrare che per tali distribuzioni la forza
gravitazionale risultante su un punto materiale esterno alla distribuzione corrisponde a quella che
si avrebbe se tutta la massa fosse concentrata al centro della sfera.
Chiariamo anzitutto che perché risulti vero quanto sopra annunciato non è necessario avere una
sfera in cui la massa è distribuita in modo omogeneo: quello che conta è che la distribuzione di
massa abbia simmetria sferica. In tutti i punti della distribuzione che si trovano alla stessa distanza
dal centro la densità locale di massa dovrà essere la stessa, ma potrà variare allontanandosi o
avvicinandosi al centro. Se d è la distanza dal centro della sfera, per la densità ρ dovremo avere
ρ = ρ(d).
Dimostreremo l’assunto non calcolando direttamente la forza, che sarebbe più complesso data la
natura vettoriale, ma determinando l’energia potenziale, da cui la forza deriva. Inoltre svolgeremo
la dimostrazione per una quantità di massa distribuita omogeneamente su una superficie sferica
di raggio R. Una distribuzione di massa a simmetria sferica si può sempre suddividere in tante
distribuzioni omogenee su “croste” concentriche di spessore infinitesimo e raggi diversi, cosı̀ che se
la proprietà vale per una di esse deve valere per l’intera distribuzione.
a)
y
b)
R
B
θ
O
y
Q
H A
Q
R
r
P
x
B
r
θ
O
P
HA
x
Fig. 6.7.1: Calcolo dell’energia potenziale gravitazionale prodotta in un punto P da una una massa M distribuita omogeneamente su una superficie sferica di centro O e raggio R. In a) il punto P si trova all’esterno della
superficie, in b) all’interno.
In fig. 6.7.1 abbiamo una massa M distribuita omogeneamente su una superficie sferica di raggio
R. Prendiamo un sistema di riferimento cartesiano con l’origine O nel centro della superficie sferica.
6.7
196
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
In figura è rappresentata la sezione della superficie effettuata dal piano XY . Prendiamo un punto
materiale P di massa m e calcoliamo l’energia potenziale gravitazionale associata all’interazione
con la distribuzione di massa. Data la simmetria del sistema, non perdiamo in generalità se
consideriamo il punto P sull’asse X. Per calcolare l’energia potenziale suddividiamo la superficie
sferica in anelli di larghezza infinitesima i cui punti hanno tutti la stessa distanza r da P. A
ciascun anello corrisponderà un angolo θ formato dalla congiungente i suoi punti con l’asse X e
un’estensione angolare dθ, corrispondente ad una larghezza R dθ. In fig. 6.7.1 vediamo un punto
Q su uno degli anelli e la sua proiezione H sull’asse X. La lunghezza dell’anello è quella di una
circonferenza di raggio QH = R sin θ La superficie dell’anello è data dal prodotto lunghezza per
larghezza e vale dS = 2 π R2 sin θ dθ. La densità di massa superficiale σ è σ = M/(4 π R2 ). Se
introduciamo la costante γ = G m possiamo scrivere l’energia potenziale gravitazionale infinitesima
associata all’interazione dell’anello con il punto P
dV = −
γ 2 πR2 σ sin θ dθ
γ M sin θ dθ
=−
r
2
r
La distanza r si può calcolare con il teorema di Carnot e vale r =
potenziale di tutta la distribuzione sarà data da
V =−
γM
2
�
0
π
(6.7.1)
√
x2 + R2 − 2 x R cos θ. L’energia
sin θ dθ
r
(6.7.2)
Osserviamo che, essendo r2 = x2 + R2 − 2 x R cos θ risulta, differenziando, 2 r dr = 2 x R sin θ dθ
da cui sin θ dθ/r = dr/(x R). In questo modo si può cambiare la variabile d’integrazione in (6.7.2)
da θ a r ottenendo
� rB
γM
γM
V =−
dr = −
(rB − rA )
(6.7.3)
2 x R rA
2xR
dove rA e rB sono rispettivamente le distanze da P degli anelli che si trovano in corrispondenza
di θ = 0 e θ = π. I valori di rA e rB cambiano a seconda che il punto P si trovi all’interno o
all’esterno della superficie sferica. Se P è all’esterno avremo rA = x − R, rB = x + R; se invece P è
all’interno avremo rA = R − x, rB = R + x. Avremo corrispondentemente per l’energia potenziale
V = − 2γxMR (x + R − x + R) = − γ xM
V = − 2γxMR (R + x − R + x) = − γRM
se P esterno
(6.7.4)
se P interno
Se P è situato esternamente alla superficie sferica l’energia potenziale gravitazionale vale −γ M/x,
ossia quella che si avrebbe se tutta la massa fosse concentrata nell’origine; se invece P si trova
all’interno l’energia potenziale ottenuta non dipende da x ed è quindi costante allo spostarsi del
punto. A questo corrisponde una forza gravitazionale nulla.
Abbiamo stabilito il risultato per una distribuzione di massa a simmetria sferica che interagisce
con un singolo punto materiale, ma è semplice estenderlo a due distribuzioni sfericamente simmetriche che interagiscono fra loro. Supponiamo di avere due tali distribuzioni, una distribuzione
1 di centro C1 e una distribuzione 2 di centro C2 . Ogni punto materiale della distribuzione 1
interagisce con la 2 come se la massa fosse concentrata in C2 e quindi il problema si riduce a quello
della distribuzione 1 interagente con un punto posto in C2 , per cui abbiamo dimostrato che tutto
va come se la massa della prima distribuzione fosse concentrata in C1 . Due distribuzioni sferiche
197
6.7
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
di massa che non si toccano fra loro interagiscono quindi come se le masse fossero concentrate nei
rispettivi centri.
Questa proprietà porta anche a un risultato piuttosto curioso, anche se quasi impossibile da
verificare sperimentalmente per ovvie motivazioni di ordine pratico. Supponiamo di avere una
distribuzione di massa sferica di centro C, raggio R e completamente omogenea. Consideriamo la
forza che si produrrebbe su un punto P di massa m che si trovasse all’interno della distribuzione, a
una distanza r < R dal centro di essa. Se, come sopra, introduciamo la costante γ = G m sappiamo
dalla (6.7.4) che la forza su P è quella che sarebbe prodotta dalla parte della distribuzione di massa
a distanza da C inferiore a r, se fosse concentrata in C. Avremo
F=−
γ Mi
γ M r3
γM
u
=
−
ur = − 3 r ur
r
r2
r 2 R3
R
(6.7.5)
dove Mi è la parte di M contenuta nella sfera di raggio r; per l’omogeneità della distribuzione Mi
sta alla massa totale M come r3 sta a R3 . La dipendenza della forza da r è lineare; si tratta quindi
di una forza di richiamo elastico.11
Se immaginiamo di ricavare una cavità rettilinea di larghezza trascurabile all’interno della nostra distribuzione di massa, che supporremmo priva di attrito alle pareti, e di lasciare un corpo
puntiforme (o comunque di dimensioni trascurabili rispetto alla sfera) a una delle estremità della
cavità, esso si muoverà di moto armonico.
y
A
F
N
P
x
C
B
Fig. 6.7.2: Un corpo P lasciato a un’estremità di una cavità rettilinea scavata in una distribuzione sferica
omogenea di massa si muove di moto armonico.
Supponiamo di avere collegato due punti qualunque A e B sulla superficie della sfera con una
cavità rettilinea. Esiste sempre un piano che contiene A, B e il centro C della sfera: in tale piano
fissiamo il nostro sistema di riferimento, con l’origine nel centro della sfera e l’asse Y parallelo alla
cavità. Un corpo P di massa m che si trovi nella cavità sarà sottoposto alla forza di gravità F data
dalla (6.7.5) e alla reazione vincolare N esercitata dalle pareti. La forza F si può scrivere come
F=−
11
GmM
(x i + y j)
R3
(6.7.6)
Abbiamo ricavato la forza all’interno della distribuzione sferica senza cercare di calcolare l’energia potenziale. Questo
perché il calcolo dell’energia potenziale gravitazionale all’interno della distribuzione di massa risulta delicato e non
banale. Esso è effettuato in Appendice 3.
6.7
198
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Scriviamo la componente lungo l’asse Y dell’equazione di moto (la componente lungo X ci darebbe
la reazione vincolare) e abbiamo
GmM
m ÿ = −
y
R3
⇒
ÿ + ω y = 0 con ω =
2
�
GM
R3
(6.7.7)
Il moto armonico ha lo stesso periodo se abbandoniamo il corpo da una posizione all’interno della
cavità invece che da uno degli estremi, ed è lo stesso indipendentemente dai punti estremi A e
B scelti, ossia, ad esempio, se la cavità corrisponde a un diametro o a una corda di lunghezza
qualsiasi. Se potessimo realizzare l’esperimento con una sfera avente il raggio e la massa della
Terra, con densità costante all’interno, il periodo risulterebbe dell’ordine di 1 h 25 m.
6.8 Il problema dei due corpi soggetti all’interazione gravitazionale
Vogliamo adesso seguire un percorso in qualche modo inverso a quello che ci ha portato dalle
leggi di Keplero alla gravitazione universale, studiando il moto di due punti materiali soggetti
soltanto alle mutue forze gravitazionali, considerando assodata la (6.4.4). Lo studio del moto di
due punti materiali interagenti solo fra loro, in assenza di forze esterne, è noto in fisica col nome
di problema dei due corpi.
Stabiliamo innanzitutto le quantità che useremo nello studio e i rispettivi nomi: due punti
materiali hanno ciascuno 3 gradi di libertà e, anche se interagiscono fra loro (salvo che attraverso
uno o più vincoli che ne limitino il movimento) il sistema da essi formato avrà 6 gradi di libertà.
Scegliamo un sistema di riferimento OXY Z e indichiamo i vettori posizione dei due punti, per
economia di scrittura, nella forma (P1 − O) = r1 , (P2 − O) = r2 . Definiamo anche r = r2 − r1 .
Come prima osservazione vediamo che se i punti interagiscono solo fra loro si deve conservare
la quantità di moto complessiva del sistema
P = m1 ṙ1 + m2 ṙ2 = (m1 + m2 ) ṙG = cost.
(6.8.1)
Nel nostro caso la forza d’interazione è conservativa, data dalla (6.4.4). Anche qui, per semplificare la notazione, introduciamo un’unica costante k = G m1 m2 . Corrispondentemente avremo
un’energia potenziale V = −k/r,dove r = |r| = |r2 − r1|, la distanza fra i punti. Potremo scrivere
la conservazione dell’energia nella forma
1
1
k
m1 ṙ21 + m2 ṙ22 − = E
2
2
r
(6.8.2)
La conservazione di P e il fatto che l’energia potenziale dipenda da r ci suggeriscono di esprimere
i vettori posizione dei punti r1 e r2 in funzione di rG e r. Le relazioni che legano i vettori posizioni
alle variabili scelte sono lineari e si ottiene facilmente
r1 = rG −
r = r +
2
G
199
m2
m1 +m2
r
m1
m1 +m2
r
(6.8.3)
6.8
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Esprimiamo adesso l’energia cinetica del sistema sostituendo le nuove variabili
�
�
1
m22
m2
2
m1 ṙ2G +
ṙ
−
2
ṙ
·
ṙ
+
g
2
(m1 + m2 )2
m1 + m2
�
�
1
m21
m1
2
+ m2 ṙ2G +
ṙ
+
2
ṙ
·
ṙ
=
g
2
(m1 + m2 )2
m1 + m2
1
1 m1 m2 2
= (m1 + m2 ) ṙ2G +
ṙ
2
2 m1 + m2
T =
(6.8.4)
Vediamo che l’energia cinetica si divide in due termini: il primo corrisponde all’energia cinetica di
un punto materiale coincidente con il centro di massa e con massa pari alla somma delle masse e
viene talvolta indicata come energia cinetica del centro di massa, perché corrisponde all’energia
cinetica che avrebbe il sistema se tutta la massa fosse concentrata nel centro di massa; il secondo
termine è detto energia cinetica relativa al centro di massa.
Per la conservazione di P risulta ṙG = cost., per cui è costante l’energia cinetica del centro
di massa. Tenendo conto di questo fatto possiamo scrivere una nuova equazione di conservazione
analoga alla (6.8.2).
1
k
µ ṙ2 − = E1
2
r
(6.8.5)
Possiamo interpretare la (6.8.5) come la conservazione dell’energia meccanica per un sistema costituito da un unico punto materiale dotato di massa µ = m1 m2 /(m1 + m2 ), dove µ è detta massa
ridotta del sistema, che si muove in un sistema di riferimento inerziale con un vettore di posizione
r. Questo risultato si dice riduzione a un corpo del problema dei due corpi. In pratica, dei 6 gradi
di libertà del sistema, l’andamento di 3 è dato dalla conservazione di P (il centro di massa è fermo
o si muove di moto rettilineo uniforme), mentre gli altri 3 gradi di libertà, corrispondenti al vettore
r2 − r1 , si possono studiare come il moto di un unico punto materiale.
a)
b)
Z
m1
P1
r1
F12
m2
P2
F21
G
Z'
r2
Y'
Y
r
O
O'
X
P
F µ
X'
Fig. 6.8.1: Riduzione del problema dei due corpi a un corpo. In a) il sistema originale dei due punti materiali
interagenti soltanto fra loro. Una volta stabilito che il centro di massa G si muove con velocità costante,
basta studiare, come illustrato in b), il moto di un solo punto materiale con massa µ = m1 m2 /(m1 + m2 ) il cui
vettore posizione è r = r2 − r1 e a cui è applicata la stessa forza prima applicata a P2 .
P1 e P2
Nel sistema ridotto la forza è sempre diretta radialmente, sulla retta che unisce il punto all’origine; questo significa che il momento di essa calcolato rispetto all’origine è nullo. Da questo
6.8
200
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
risulta per la (4.4.5) la costanza del momento angolare L. Abbiamo due possibilità
1. Nelle condizioni iniziali L = 0 e il momento rimane nullo nel moto successivo: essendo L =
r × µ v, questo implica che la velocità è sempre solo radiale e il moto si svolge lungo la retta che
unisce la posizione iniziale del punto con l’origine.
2. Nelle condizioni iniziali L �= 0 : se il momento angolare è costante e non nullo i vettori r e
v durante il moto non sono mai paralleli e giacciono nel piano, che rimane costante nel moto,
passante per l’origine perpendicolare a L. Il moto risulta quindi piano, ossia confinato in due
sole dimensioni.
Vogliamo studiare il moto nel caso 2, che è più generale e interessante. Sapendo che il moto si
svolge in un piano fisso, possiamo scegliere il sistema di riferimento in modo che vi giacciano gli
assi delle ascisse e delle ordinate. Questo ci permetterà di studiare il moto in coordinate polari
usando quanto ricavato in 2.8.3. Possiamo scrivere due equazioni indipendenti, che costituiscono
le equazioni di moto del sistema, per mezzo della conservazione dell’energia nella forma (6.8.5) e
di quella del momento angolare, che per il nostro moto piano è dato dalla (6.1.1)
12 µ (ṙ2 + r2 ϕ̇2 ) −
k
r
= E1
(6.8.6)
µ r ϕ̇ = l
2
Dove le costanti E1 e l si determinano in base alle condizioni iniziali. Possiamo ricavare ϕ̇ dalla
seconda equazione e sostituirlo nella prima, ottenendo
1
1 l2
k
µ ṙ2 +
− = E1
2
2
2 µr
r
(6.8.7)
Questa è un’equazione differenziale del primo ordine nella sola variabile r, che può essere integrata
per separazione di variabili. Possiamo interpretare l’equazione come la conservazione dell’energia
per un punto materiale di massa µ che si muove lungo una sola direzione: il primo termine al primo
membro è infatti l’energia cinetica che competerebbe a un tale punto, mentre i termini successivi
sono funzioni soltanto della posizione e si possono interpretare come l’energia potenziale. Questo è
ovvio per l’ultimo termine, mentre il secondo costituisce una novità interessante; esso infatti deriva
dal termine (1/2) µ r2 ϕ̇2 della (6.8.6), che rappresenta una parte dell’energia cinetica nel moto
piano, ma per la conservazione del momento angolare può essere scritto come funzione solo di r.
Il termine, per motivi che saranno chiari nel seguito, prende il nome di barriera centrifuga.
In questa sede non vogliamo spingerci ad integrare la (6.8.7),12 ma possiamo ricavare molte
informazioni interessanti studiando l’andamento dell’energia potenziale, che nell’interpretazione
sopra enunciata ha la forma
V (r) =
1 l2
k
−
2
2 µr
r
(6.8.8)
Non è difficile determinare l’andamento di V (r), ricordando che k > 0 e µ > 0:
– Per r → 0 il primo termine, in 1/r2 , prevale sul secondo e quindi V (r) → +∞.
– Per r → ∞ il primo termine è trascurabile rispetto al secondo e V (r) � −k/r. Ne segue che
V (r) è negativa e cresce asintoticamente verso il valore 0.
– V (r) si annulla solo per r = r0 = l2 /(2 k µ), è positiva per r < r0 e negativa per r > r0 .
12
Una soluzione più completa è data in Appendice 4.
201
6.8
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
– La derivata dV (r)/dr si annulla solo per r = rm = l2 /(k µ) (rm = 2 r0 ). Dal segno della derivata
si ricava che V (r) è decrescente per r < rm e crescente per r > rm .
L’energia potenziale si può quindi tracciare come in fig. 6.8.2.
E1 [J]
E1b
1.10 28
0
ro
r [m]
rm
1.10 9
2.10 9
3.10 9
4.10 9
-1.10 28
-2.10 28
r1
E1a
r2
-3.10 28
Fig. 6.8.2: Andamento dell’energia potenziale (6.8.8). Il grafico è stato tracciato con i dati relativi al moto
della Luna intorno alla Terra.
Dato che deve essere E1 ≥ V (r) (vedi 5.8), il valore minimo possibile dell’energia, prefissato
il valore di l, corrisponde al minimo di V (r), il valore in r = rm . Corrispondentemente abbiamo
E1m = −µ k2 /(2 l2 ). In questa situazione la distanza r fra i corpi deve rimanere uguale a rm e
abbiamo un’orbita circolare.13 Per valori di E1 tali che E1m < E1 < 0, come E1a in figura, durante
il moto r varia fra due valori limite, r1 e r2 . Si può dimostrare14 che in queste condizioni il moto
avviene su una traiettoria ellittica con un fuoco in r = 0, in cui r1 e r2 sono la minima e la massima
distanza fra gli oggetti. I due corpi non si allontanano mai indefinitamente e il moto viene detto
legato.
Se E1 > 0, come E1b in figura, esiste una distanza minima fra i due corpi, dovuta al termine
di V (r) proporzionale a 1/r2 (da cui si comprende il nome di “barriera” centrifuga), ma non una
distanza massima. Il moto quindi non è confinato e avviene su una traiettoria aperta, che si può
dimostrare essere di forma iperbolica. Nel caso particolare in cui E1 = 0 la traiettoria è ancora
aperta, ma risulta di forma parabolica.
Vediamo quindi che per due punti materiali interagenti tramite la forza gravitazionale
– Il centro di massa resta fermo o si muove di moto rettilineo uniforme.
– Dalla (6.8.3) vediamo che se scegliamo un sistema di riferimento centrato nel centro di massa e
con gli assi fissi (inerziale per quanto detto immediatamente sopra), avremo le nuove coordinate
dei punti r� 1 e r� 2 date da
�
m2
r
r1 = r1 − rG = − m1 +m
2
(6.8.9)
r� = r − r = m1 r
2
G
2
m1 +m2
In questo sistema i due punti si trovano in ogni momento su una retta passante per l’origine,
in posizioni opposte e con distanze inversamente proporzionali alle rispettive masse. Se quindi
13
14
I valori dell’energia E1 di cui parliamo adesso corrispondono a una scelta particolare per la costante che compare
sempre nell’energia potenziale, che corrisponde ad avere V (r) → 0 quando r → ∞. Se avessimo scelto un altro
valore della costante, tutti i valori di E1 sarebbero diversi ma non cambierebbe il comportamento fisico del sistema.
Vedi Appendice 4.
6.8
202
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
r varia seguendo una traiettoria ellittica, anche i due punti si muovono su traiettorie ellittiche
aventi un fuoco nel centro di massa, come illustrato in fig. 6.8.3.
Fig. 6.8.3: Moto legato di due punti materiali sotto l’azione dell’attrazione gravitazionale, nel sistema del
centro di massa. Il punto disegnato in rosso ha massa doppia di quello in verde. I segmenti di retta uniscono le
posizioni dei due punti a uno stesso istante e passano tutti per il centro di massa. Le varie posizioni sono tracciate
a intervalli di tempo costanti, in modo da evidenziare la costanza della velocità areolare.
203
6.8
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
204
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
7.
Urti
Esattamente come nella vita di tutti i giorni, in meccanica si parla di urti quando due corpi
arrivano in contatto con velocità diverse e fra loro si sviluppa un’interazione caratterizzata da forze
particolarmente intense che agiscono per tempi molto brevi (in generale, ben sotto il secondo) e
cambi repentini di velocità.
Fig. 7.1.1: Una palla da baseball nel momento in cui viene colpita dalla mazza. Si noti l’evidente
deformazione, che mostra chiaramente l’intensità delle forze che si sviluppano fra i due oggetti.
In fig. 7.1.1 si nota l’evidente deformazione di una palla da baseball nel momento in cui viene
colpita dalla mazza: per chi ha mai provato a stringerne una in mano è chiara l’entità della forza
necessaria a provocare un effetto simile.
7.1 Impulso di una forza
Per studiare i fenomeni di urto è utile introdurre una nuova grandezza fisica, l’impulso di una
forza. L’impulso di una forza che opera per un intervallo di tempo [t1 , t2 ] non è che l’integrale della
forza rispetto al tempo
� t2
I=
F dt
(7.1.1)
t1
Per l’impulso vale una proprietà analoga al teorema delle forze vive per il lavoro. Se F è l’unica
forza o la somma delle forze applicate a un punto materiale avremo
I=
�
t2
t1
F dt =
�
t2
t1
m a dt =
�
v(t2 )
v(t1 )
m dv = m v(t2 ) − m v(t1 ) = ∆ P
(7.1.2)
Quindi l’impulso della somma delle forze applicate a un punto materiale corrisponde alla variazione
205
7.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
di quantità di moto. Se consideriamo un sistema di punti possiamo considerare l’impulso totale
come somma di tutti gli impulsi di tutte le forze applicate ai punti Pi del sistema e avremo,
ricordando la (4.1.1) e la (4.1.2)
I=
� ��
i
t2
t1
� �
Fi dt =
t2
t1
�
�
i
�
Fi dt =
�
t2
t1
Re dt =
�
t2
M aG dt = ∆ P
(7.1.3)
t1
Quindi vediamo che per un sistema di punti materiali l’impulso totale risulta solo dalle forze esterne,
mentre le forze interne danno un contributo complessivo nullo, e che l’impulso coincide ancora con
la variazione della quantità di moto.
7.2 Proprietà degli urti
In generale i fenomeni di urto sono caratterizzati da alcune proprietà:
1. Le forze che si sviluppano durante l’urto, se si considera come sistema meccanico l’insieme
dei corpi coinvolti, sono forze interne. Esse quindi non provocano variazione della quantità
di moto. Se il sistema è isolato, ossia non interagisce con altri corpi, la quantità di moto si
conserva rigorosamente. Inoltre dobbiamo tener presente che se anche sui corpi che collidono
agiscono altre forze (ad esempio, le forze peso), la loro entità è del tutto trascurabile, durante
l’urto, rispetto alle forze che dall’urto sono provocate direttamente, e che vengono dette forze
impulsive. Inoltre la durata breve dell’urto fa sı̀ che la variazione di quantità di moto dovuta
alle forze non impulsive sia trascurabile. Per questo si può approssimare, nell’urto fra corpi non
vincolati, la quantità di moto finale uguale a quella iniziale. Lo stesso ragionamento vale per
il momento della quantità di moto. Occorre tuttavia notare che se gli oggetti che partecipano
all’urto sono vincolati ad altri oggetti fissi, durante l’urto le forze vincolari, per mantenere le
condizioni cinematiche, possono diventare dello stesso ordine di grandezza delle forze impulsive.
In questo caso si dice che i vincoli sono cimentati dall’urto e non si può più affermare, in generale,
che non si hanno variazioni della quantità di moto e/o del momento angolare.
2. Il fatto che gli urti avvengano in tempi brevi permette di trarre una conseguenza importante
sugli spostamenti degli oggetti durante un urto. Per vedere questo fatto consideriamo un caso
estremamente semplice. A un punto materiale di massa m inizialmente fermo viene applicata una
forza F costante per un tempo τ , quindi comunicando un impulso I = F τ . Al tempo τ il punto
avrà una quantità di moto P = I, ossia una velocità v = I/m. Lo spazio percorso dal punto al
tempo τ sarà s = (1/2) (F/m) τ 2 = (1/2) (I/m) τ . Se ripetiamo l’esperimento diminuendo via
via τ e aumentando in proporzione F in modo da mantenere I costante, vediamo che la velocità
finale al tempo τ rimane sempre la stessa, ma lo spazio percorso dal corpo, che è proporzionale
a τ , via via diminuisce. Questi risultati sono illustrati in fig. 7.2.1. Tale comportamento non
vale solo per il nostro esempio ma è assolutamente generale e ci porta a concludere che possiamo
trascurare gli spostamenti dei corpi durante gli urti, dove forze molto grandi operano per tempi
molto piccoli.
Queste proprietà ci portano a definire quella che si chiama approssimazione impulsiva, che
consiste nel trattare il sistema degli oggetti che collidono come isolato durante l’urto, a trascurare
la durata dell’urto stesso e gli spostamenti che avvengono. In pratica, si considerano forze tendenti
a infinito che operano per un tempo tendente a zero, per cui, come già accennato in 2.7.2, i corpi
coinvolti nell’urto hanno variazioni istantanee finite di velocità. Nello studio degli urti si cerca, per
quanto possibile, di non dover considerare nei particolari quello che succede durante l’interazione,
ma si è interessati a determinare le velocità subito dopo l’urto in base a quelle immediatamente
precedenti ad esso, sfruttando i principi di conservazione e le caratteristiche dell’interazione.
7.2
206
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
a [m.s –2]
10
8
6
4
2
0.0
1.0
0.2
0.4
0.6
0.8
1.0 t [s]
0.2
0.4
0.6
0.8
1.0 t [s]
v [m.s –1]
0.8
0.6
0.4
0.2
0.0
s [m]
1.0
0.8
0.6
0.4
0.2
0.0
0.2
0.4
0.6
0.8
t [s] 1.0
Fig. 7.2.1: Una forza costante agisce su un punto materiale inizialmente fermo per un tempo dato τ . I grafici
rappresentano l’andamento dell’accelerazione, della velocità e dello spazio percorso per quattro valori della forza e
del tempo diversi, ma con impulso costante. La massa del punto è 1 kg, l’impulso 1 N · s e i tempi di azione della
forza sono 0.1, 0.2, 0.5 e 1 s. Nel grafico dello spazio percorso sono evidenziati i punti corrispondenti alla cessazione
della forza e i rispettivi spostamenti.
7.3 Urti fra due particelle
Vogliamo esaminare adesso il tipo più semplice di urti, ossia quello che avviene fra due particelle,
ossia di due corpi che si comportano cinematicamente come punti materiali. Considereremo quindi
un sistema con sei gradi di libertà, corrispondenti alle coordinate della prima e della seconda
particella. Indichiamo con m1 e m2 le masse delle due particelle, con v1 e v2 le loro rispettive
velocità. Possiamo scrivere in funzione di questi elementi la quantità di moto e l’energia cinetica
del sistema1
P = m1 v1 + m2 v2 = M vG
1
1
T = m1 v12 + m2 v22
2
2
(7.3.1)
Studiamo l’urto in maniera analoga a quanto fatto per il problema dei due corpi. In particolare
esprimiamo le velocità delle due particelle in funzione di due parametri: la velocità del centro di
massa vG e la differenza delle velocità w = v1 − v2 . Le velocità delle particelle, analogamente a
1
Da qui in poi useremo i pedici “i” (iniziale) per indicare le grandezze immediatamente prima dell’urto e “f ” (finale)
per le grandezze immediatamente dopo l’urto. Dove questi mancano, come nelle formule immediatamente seguenti,
le relazioni valgono in generale.
207
7.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
quanto ottenuto nella (6.8.3), si possono scrivere in funzione delle nuove variabili
v1 = vG +
v = v −
2
G
m2
m1 +m2
w
m1
m1 +m2
w
(7.3.2)
Per l’energia cinetica otteniamo, analogamente alla (6.8.4)
T =
1
1
2
M vG
+ µ w2
2
2
(7.3.3)
La (7.3.3) permette di fare una considerazione molto importante su questo tipo di urti. Se escludiamo situazioni in cui durante l’urto si libera una certa quantità di energia che prima era “congelata”
nel sistema (si può pensare, ad esempio, ad una molla compressa che viene sbloccata, o a una carica
esplosiva che si innesca) l’energia meccanica, che prima e dopo l’urto è data dall’energia cinetica
(7.3.3), può solo conservarsi o diminuire, il secondo caso perché viene immagazzinata energia potenziale (ad esempio, si comprime una molla che resta poi bloccata) o perché viene dissipata da
forze d’attrito o in altro modo. Dalla (7.3.3) vediamo che, dovendo rimanere costante vG per la
conservazione della quantità di moto, il primo termine di T , l’energia cinetica del centro di massa,
non può variare. L’eventuale diminuzione di energia cinetica fra prima e dopo l’urto è quindi dovuta solo a una variazione del secondo termine, l’energia cinetica relativa al centro di massa. Da
ciò scaturiscono le seguenti conseguenze
– A meno che la velocità del centro di massa prima dell’urto sia nulla, non si può avere un urto
in cui l’energia cinetica finale risulti nulla, ossia entrambe le particelle dopo l’urto siano ferme.
– Se nell’urto si conserva l’energia, ossia Tf = Ti , dovrà essere wf2 = wi2 , ossia |wf | = |wi |.
Il modulo della differenza delle velocità rimarrà quindi invariato, mentre potrà variare la sua
direzione. Un urto di questo genere si chiama urto elastico.
– Si ha la massima perdita di energia quando wf2 = 0, ossia |wf | = 0. Questo urto si chiama
completamente anelastico e dopo un tale urto, dato che w = v1 − v2 , le due particelle avranno
la stessa velocità; in pratica dall’urto usciranno come se si fossero “appiccicate” a formare
un’unica particella. La velocità finale sarà ovviamente v1f = v2f = vG .
7.3.1 Urti elastici unidimensionali
Vogliamo studiare il caso più semplice di urti elastici, quello per cui le due particelle si muovono
sempre su una stessa linea. Un urto di questo genere si ha, ad esempio, quando una palla di biliardo
ne colpisce un’altra ferma in modo perfettamente centrato. Studieremo il fenomeno introducendo
un asse X corrispondente alla linea di moto delle particelle e potremo omettere la connotazione
vettoriale nelle (7.3.2), intendendo con v1 e v2 le velocità, positive o negative, lungo l’asse, ossia
v1 = v1 i e v2 = v2 i. La conservazione della quantità di moto in una direzione fornisce una
relazione scalare, mentre un’altra è fornita dalla conservazione dell’energia; abbiamo due incognite
scalari, v1f e v2f , per cui possiamo determinarle direttamente senza bisogno di altre informazioni.
Le (7.3.2) diventano
m2
w
v1 = vG + m1 +m
2
(7.3.4)
v = v − m1 w
2
G
m1 +m2
L’elasticità dell’urto implica in generale |wf | = |wi |; data l’unidimensionalità questa relazione
si traduce in |wf | = |wi |, da cui wf = ±wi . La soluzione wf = wi , come si vede considerando
7.3.1
208
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
le (7.3.4), implica v1f = v1i e v2f = v2i , ossia nessun cambio di velocità fra prima e dopo l’urto.
Questa situazione implicherebbe un “non–urto”: essa è chiaramente permessa dalle condizioni
di conservazione, che vengono ovviamente rispettate, ma nella grandissima parte dei casi non è
fisicamente possibile (ad esempio, una palla di biliardo che arriva centrata su un’altra non può
attraversarla senza interagire, come se fosse immateriale!). Resta la soluzione wf = −wi , ossia
v1f − v2f = −(v1i − v2i ). Questa relazione, insieme alla conservazione della quantità di moto,
permette di scrivere un sistema lineare che dà la soluzione del problema
�m v + m v = m v + m v
1 1f
2 2f
1 1i
2 2i
v1f − v2f = v2i − v1i
(7.3.5)
Il sistema lineare di primo grado si risolve facilmente e si ottiene
v1f =
v2f =
m1 −m2
m1 +m2
v1i +
2 m2
m1 +m2
v2i
2 m1
m1 +m2
v1i +
m2 −m1
m1 +m2
v2i
(7.3.6)
Un caso interessante si ha quando m1 = m2 : dalle (7.3.6) si ottiene v1f = v2i , v2f = v1i . Le due
particelle si scambiano le velocità. Un altro caso interessante è quello per cui una delle particelle,
ad esempio la seconda, è ferma prima dell’urto, ossia v2i = 0. In questo caso
1. Se m1 < m2 la prima particella rimbalza indietro, mentre la seconda si mette in moto nella
direzione che aveva la prima, ma con velocità minore.
2. Se m1 > m2 la prima particella prosegue nella stessa direzione con velocità minore di quella che
aveva prima, mentre la seconda si mette in moto nella stessa direzione con velocità maggiore di
quella iniziale della prima.
3. Se m1 = m2 la prima particella si ferma e la seconda prosegue con la velocità che aveva l’altra.
È un caso particolare dello scambio di velocità.
7.3.2 Urti elastici bidimensionali
Adesso passiamo a studiare l’urto di particelle in cui le velocità iniziali sono su una stessa
linea, ma le forze che si sviluppano non sono in generale dirette lungo la linea, per cui nell’urto
le particelle cambiano direzione. Questo avviene, ad esempio, se una palla di biliardo ne colpisce
un’altra ferma in modo non centrato.
Studiamo l’urto in un sistema di riferimento in cui l’asse X contiene le velocità iniziali. Lo stesso
asse conterrà quindi anche la velocità del centro di massa vG , che rimane invariata nell’urto. Le
velocità finali delle due particelle saranno dirette in generale in direzioni diverse, per cui formeranno
fra loro un angolo ed esisterà un solo piano che le contiene. In questo piano dovrà trovarsi anche
la velocità del centro di massa, che è una combinazione lineare delle velocità delle particelle, e
quindi il piano dovrà contenere l’asse X. Nel caso in cui le velocità delle particelle dopo l’urto
avessero la stessa direzione, questa sarebbe anche la direzione di vG e quindi le velocità resterebbero
lungo l’asse X e si avrebbe un urto unidimensionale. Esisterà quindi un piano, passante per
l’asse X, in cui si troveranno le velocità delle particelle sia prima sia dopo l’urto, che risulterà
quindi bidimensionale. Per determinare il piano dell’urto occorre avere informazioni ulteriori sulla
modalità di esso e sulle forze che si sviluppano: nel caso delle palle di biliardo, ad esempio, le
forze non hanno componenti verticali e le velocità resteranno in un piano orizzontale. Vediamo
comunque che, anche conoscendo il piano in cui si sviluppa l’urto, la conservazione della quantità di
moto e dell’energia non sono sufficienti a determinare le velocità finali. Infatti adesso queste hanno
209
7.3.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
due componenti ciascuna, per cui abbiamo in totale quattro incognite scalari. La conservazione
della quantità di moto nel piano fornisce due relazioni scalari e quella dell’energia una terza, che
non sono sufficienti, da sole, a determinare le incognite. Occorre in generale ulteriore informazione
sull’interazione che si ha nell’urto: tornando ad esempio alle palle di biliardo, si può assumere che
la forze d’urto che esse si applicano reciprocamente siano nella direzione che unisce i rispettivi
centri, e da questo si può ricavare la direzione della velocità della palla colpita dopo l’urto.
Per studiare un urto in due dimensioni risulta utile considerare un sistema di riferimento non
fisso, ma centrato nel centro di massa delle due particelle e con gli assi paralleli a quelli del
sistema fisso. Dato che la velocità del centro di massa si conserva, questo sistema è inerziale e non
comporta l’introduzione di forze d’inerzia. Se indichiamo con u1 e u2 le velocità in questo sistema,
esse varranno u1 = v1 − vG e u2 = v2 − vG , mentre la loro differenza sarà ancora data da w. Nel
sistema del centro di massa le (7.3.2) diventano dunque
u1 =
m2
m1 +m2
w
(7.3.7)
u = − m1 w
2
m1 +m2
Le (7.3.7) valgono sia prima che dopo l’urto e mostrano una proprietà molto importante: le velocità
delle due particelle nel sistema del centro di massa risultano sempre su una stessa linea, una
opposta all’altra e il rapporto fra i loro moduli è inversamente proporzionale al rapporto delle
masse: |u1 | / |u2 | = m2 /m1 . Nel caso di urto elastico |wf | = |wi | e conseguentemente i moduli
delle due velocità, |u1 | e |u2 |, non variano nell’urto. Varia soltanto la direzione di w e quindi
l’unico parametro incognito rimane la nuova direzione di wf . Se indichiamo con Θ l’angolo fra la
nuova e la vecchia direzione, l’urto si può rappresentare come in fig. 7.3.1.
centro di massa
laboratorio
anelastico
v1f
v1i
v2f
u1f
u1i
θ1
θ2
Θ
u2f
u2i
v1f
elastico
v1i
u 1f
u1i
θ1
v2f
θ2
Θ
u2f
u2i
Fig. 7.3.1: I diagrammi rappresentano le velocità prima e dopo l’urto fra due particelle. I due diagrammi
superiori si riferiscono a un urto parzialmente anelastico, mentre quelli inferiori a un urto elastico. I diagrammi di
sinistra mostrano le velocità nel sistema del laboratorio, quelli di destra nel sistema del centro di massa. In ciascun
urto si ha m2 = 2 m1 e v2i = 0. Nel sistema del centro di massa si vede che le velocità delle due particelle sono sulla
stessa retta; inoltre nell’urto anelastico esse diminuiscono mentre rimangono costanti in modulo nell’urto elastico.
Gli urti bidimensionali di due particelle possono essere rappresentati geometricamente per mezzo
di un diagramma che mostra le relazioni fra gli angoli di deviazione θ1 e θ2 delle particelle nel sistema
7.3.2
210
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
del laboratorio e l’angolo di deviazione Θ nel sistema del centro di massa. Se moltiplichiamo la
prima delle (7.3.2) membro a membro per m1 e la seconda per m2 , considerando le condizioni dopo
l’urto abbiamo
�m v = m v + µw
1 1f
1 G
f
(7.3.8)
m2 v2f = m2 vG − µ wf
dove µ = m1 m2 /(m1 + m2 ) è la massa ridotta del sistema. Le relazioni vettoriali espresse dalla
(7.3.8) si possono rappresentare nel diagramma di fig. 7.3.2.
θ1
m
µw
f
f
m 1v 1
m1vG
2v
2f
Θ
m2vG
θ2
Fig. 7.3.2: Diagramma di urto fra due particelle, dove sono rappresentati gli angoli di deviazione θ1 e θ2 dopo
l’urto e l’angolo di deviazione Θ nel sistema del centro di massa.
Il diagramma risulta ancora più interessante nel caso particolare di urto elastico in cui la particella 2 sia inizialmente ferma: v2i = 0. Se scriviamo la seconda delle (7.3.2) moltiplicata membro
a membro per m2 e la consideriamo prima dell’urto abbiamo m2 v2i = m2 vG − µ wi . Se la
velocità iniziale della seconda particella è nulla abbiamo µ wi = m2 vG . Per l’elasticità dell’urto
|wf | = |wi |, per cui vale µ |wf | = m2 |vG |. Questa uguaglianza fa sı̀ che nel diagramma di fig. 7.3.2
l’estremo del vettore µ wf si trova su una circonferenza di raggio m2 |vG |, e abbiamo i diagrammi
di fig. 7.3.3.
a)
b)
m2vG
f
µw
µw
f
m1vG
Θ
θ1
m1vG
θ2
Θ
m2vG
v 2f
m2
θ1 θ1max
v 1f
m1
v 2f
m2
f
m 1v 1
θ2
Fig. 7.3.3: Urto elastico fra due particelle, di cui la seconda inizialmente ferma. In a) m1 > m2 , in b) m1 < m2 .
Nel diagramma a) la massa m1 della particella 1 che colpisce è maggiore di quella m2 della
particella 2 ferma: si vede che la particella 1 non potrà mai essere deflessa oltre un angolo massimo
θ1max = arcsin(m2 /m1 ). Se invece m1 < m2 la prima particella può essere deflessa a qualsiasi
angolo. La seconda particella, come è ovvio, non può mai essere deflessa all’indietro.
211
7.3.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
7.4 Esempi di urti in sistemi meccanici
Vogliamo concludere lo studio degli urti con due esempi di sistemi meccanici di uso pratico in
cui la teoria esposta trova applicazione.
7.4.1 Il pendolo balistico
Il pendolo balistico è uno strumento inventato nel 1742 dal matematico inglese Benjamin Robins
(1707—1751), con lo scopo di misurare la velocità di un proiettile sparato da una pistola o un
fucile. I proiettili delle armi attualmente in uso hanno velocità all’uscita dalla canna dell’ordine
di 300 ÷ 400 m · s−1 per le pistole e 800 ÷ 900 m · s−1 per i fucili e le armi automatiche da guerra,
ossia circa 1 ÷ 3 volte quella del suono nell’aria. Attualmente non è difficile misurare velocità simili
usando due cellule fotoelettriche disposte a distanze anche solo dell’ordine del metro fra loro, dato
che intervalli di tempo dell’ordine di 1 ms possono essere rilevati con molta facilità e precisione per
via elettronica. Sicuramente i proiettili del XVIII secolo avevano velocità minori, ma comunque
non misurabili direttamente attraverso il rilevamento dei tempi di passaggio, data la tecnologia
dell’epoca. Il metodo di Robins consiste nel far incidere il proiettile su un blocco di materiale
(tipicamente legno) nel quale esso si conficca realizzando un urto completamente anelastico. Il
blocco è sospeso in modo da formare un pendolo, che si mette in moto in seguito all’urto del
proiettile con una velocità iniziale che può essere dedotta misurando l’elongazione massima del
pendolo. Alla base del funzionamento del dispositivo sta il fatto che la massa del proiettile,
tipicamente dell’ordine di 10 g o meno, è almeno due ordini di grandezza inferiore a quella del
blocco in cui si conficca, per cui la velocità del blocco dopo l’urto risulta ridotta rispetto a quella
del proiettile nella stessa misura.
In una versione del pendolo balistico il blocco su cui incide il proiettile è sospeso a dei fili in
modo da formare un pendolo semplice o un sistema equivalente.
C
D
N1 ϕ
N2
A
m1
B
m2
Fig. 7.4.1: Pendolo balistico realizzato con un blocco sospeso mediante fili.
In fig. 7.4.1 si vede un proiettile di massa m1 che incide con velocità v1 orizzontale su un
blocco di legno di massa m2 , sospeso mediante due fili di lunghezza l. Le forze che agiscono sul
sistema sono le forze peso del blocco e del proiettile, ovviamente non impulsive, la forza impulsiva
che si sviluppa fra i due oggetti nell’urto che, se l’arma è stata puntata correttamente, risulta
orizzontale, e infine le reazioni vincolari dei fili di sospensione, dirette secondo la verticale e quindi
non cimentate dall’urto. In queste condizioni la componente orizzontale della quantità di moto del
sistema non varia durante l’urto e abbiamo
m1 v1 = (m1 + m2 ) vf
7.4.1
212
(7.4.1)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
dove vf è la velocità orizzontale del blocco con il proiettile conficcato immediatamente dopo l’urto.
A questo punto il blocco si muove vincolato dai fili, ossia spostandosi verso destra e allo stesso
tempo sollevandosi, come mostrato in figura. Va notato che tutti i punti del blocco e del proiettile
conficcato in questo moto hanno la stessa velocità e quindi si ha una traslazione pura. La velocità
di ogni punto del blocco corrisponde alla velocità degli estremi dei fili di sospensione, A e B a
contatto con esso, e, dato che questi ruotano intorno ai rispettivi estremi fissi C e D, può essere
espressa come v = l ϕ̇ uϕ , dove ϕ è l’angolo formato dai fili con la verticale discendente e uϕ il
versore tangente alle traiettorie circolari di A e B. Possiamo analizzare il moto successivo all’urto
fissando l’origine dei tempi immediatamente dopo la collisione e prendendo come condizioni iniziali
ϕ(0) = 0, ϕ̇(0) = ω0 = vf /l, dove l’ultima relazione deriva dall’uguagliare, come dovuto, la velocità
del blocco espressa in funzione di ϕ a quella che risulta immediatamente dopo l’urto dalla (7.4.1).
Dal momento che il sistema blocco più proiettile trasla, il moto successivo corrisponde a quello
di un pendolo semplice in cui la massa totale m1 + m2 fosse concentrata all’estremo di uno dei
fili di sospensione, analizzabile per mezzo della conservazione dell’energia. L’energia cinetica di
un tale dispositivo è data da T = (1/2) (m1 + m2 ) l2 ϕ̇2 , mentre l’energia potenziale è data da
V = −(m1 + m2 ) g l cos ϕ. Possiamo quindi scrivere l’equazione della conservazione dell’energia
1
1
(m1 + m2 ) l2 ϕ̇2 − (m1 + m2 ) g l cos ϕ = (m1 + m2 ) l2 ω02 − (m1 + m2 ) g l
2
2
(7.4.2)
Se avremo scelto opportunamente i valori di m2 e l il pendolo oscillerà fino a raggiungere un valore
massimo ϕ1 dell’angolo, arrivato al quale si fermerà e tornerà indietro. L’angolo massimo ϕ1 si può
misurare se si appoggia a uno dei fili un ago di materiale molto leggero imperniato nell’estremo
fisso (C o D), che ruota insieme al filo finché ϕ cresce, ma resta fermo nella posizione del massimo
quando il pendolo torna indietro, grazie a una lieve frizione al suo perno. L’angolo ϕ1 corrisponde
al valore di ϕ per cui nella (7.4.2) risulta ϕ̇ = 0 ed abbiamo
(m1 + m2 ) g l (1 − cos ϕ1 ) =
1
1
m21
(m1 + m2 ) l2 ω02 =
v2
2
2 m1 + m2 1
(7.4.3)
Dalla (7.4.3) si ricava facilmente la velocità del proiettile immediatamente prima dell’urto
v1 =
m1 + m2 �
2 g l (1 − cos ϕ1 )
m1
(7.4.4)
Per avere un’idea del funzionamento pratico del dispositivo, se abbiamo m1 = 10 g e v1 = 400 m·s−1 ,
usando un pendolo balistico con m2 = 2 kg e l = 1 m si ottiene un’elongazione ϕ1 � 37◦ .
Un problema che può presentarsi con il dispositivo è legato al fatto che una direzione del proiettile
non esattamente orizzontale e giacente nel piano di oscillazione del pendolo può portare a urti in
cui i fili diventano laschi o sono cimentati da forze impulsive capaci di spezzarli. Tali problemi
possono essere evitati se il blocco viene imperniato a un centro fisso mediante un sostegno rigido,
costituendo un pendolo composto. Questo tipo di pendolo balistico è mostrato in fig. 7.4.2.
Dobbiamo considerare le reazioni vincolari che il perno applica al pendolo nel punto di sospensione C e che possiamo schematizzare come una componente verticale V e una orizzontale H. La
forza d’urto nell’interazione blocco – proiettile sarà diretta orizzontalmente, per cui mentre possiamo escludere che la reazione V sia cimentata, questo non si può affatto dire per H, che risulterà in
generale una forza impulsiva e dunque non trascurabile durante l’urto. In queste condizioni la componente orizzontale della quantità di moto del sistema non rimarrà invariata nell’urto, ma vediamo
facilmente che rimarrà invariato il momento angolare misurato rispetto al punto di sospensione C.
213
7.4.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Infatti la forza d’urto non provoca variazioni in quanto interna, le forze peso non sono impulsive
e le reazioni in C hanno momento nullo. Con il sistema di riferimento scelto, avente l’origine in
C e l’asse delle ascisse orizzontale, possiamo scrivere la componente del momento angolare del
sistema in direzione Z, immediatamente prima dell’urto, come Li = m1 h v1 , dove h è la distanza
in verticale fra la traiettoria del proiettile e la quota del punto di sospensione.
y
H
h
m1
V
C
x
ϕ
l
G
m2
Fig. 7.4.2: Pendolo balistico realizzato con un blocco rigidamente imperniato.
Se supponiamo che il proiettile resti conficcato sulla verticale del centro di massa G del pendolo2
avremo per la componente del momento angolare immediatamente dopo l’urto Lf = (I +m1 h2 ) ω0 ,
dove I è il momento d’inerzia del pendolo rispetto all’asse Z del sistema di riferimento, passante per
C, e ω0 il valore iniziale di ϕ̇ immediatamente dopo l’urto, in perfetta analogia al caso precedente.3
Risulta
m1 h v1 = (I + m1 h2 ) ω0
(7.4.5)
Possiamo studiare il moto del pendolo dopo l’urto mediante la conservazione dell’energia. L’energia
cinetica dopo l’urto è data da T = (1/2) (I + m1 h2 ) ϕ̇2 , e l’energia potenziale V = −(m2 l +
m1 h) g cos ϕ. L’equazione della conservazione dell’energia risulta
1
1
(I + m1 h2 )ϕ̇2 − (m2 l + m1 h) g cos ϕ = (I + m1 h2 )ω02 − (m2 l + m1 h) g
2
2
(7.4.6)
Come nel caso precedente, il pendolo arriva a un’elongazione massima ϕ1 data da
1
(I + m1 h2 )ω02 = (m2 l + m1 h) g (1 − cos ϕ1 )
2
(7.4.7)
√
I + m1 h2 �
v1 =
2 (m2 l + m1 h) g (1 − cos ϕ1 )
m1 h
(7.4.8)
da cui
2
3
O comunque se trascuriamo gli effetti dovuti al fatto che questa condizione non si realizzi in pieno, molto piccoli in
quanto m1 � m2 .
Trascurando le dimensioni finite del proiettile rispetto alla distanza h dal centro di sospensione.
7.4.1
214
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Un inconveniente di questo metodo sta nel fatto che componente orizzontale della reazione vincolare nel perno risulta cimentata: ciò comporta uno sforzo al perno che sollecita indebitamente la
struttura. Vogliamo vedere se scegliendo opportunamente la quota h a cui far incidere il proiettile è
possibile avere una situazione in cui la reazione orizzontale non viene sollecitata. Per questo scopo
studiamo il sistema durante l’urto per mezzo della (3.4.2) e delle equazioni cardinali. Introduciamo
la forza F = F i agente sul blocco e corrispondentemente −F = −F i agente sul proiettile. Scriviamo la (3.4.2) in direzione orizzontale per il proiettile, la prima cardinale in direzione orizzontale
per il pendolo e la seconda cardinale per il pendolo con centro in C
m1 ẍ1 = −F
m2 ẍ2 = F − H
I ϕ̈ = F h
(7.4.9)
dove x1 e x2 sono, rispettivamente, le coordinate dei centri di massa del proiettile e del pendolo.
Consideriamo l’urto iniziare per t = 0 con durata τ e integriamo le (7.4.9) rispetto al tempo durante
l’urto
�τ
m1 ẍ1 dt = m1 h ω0 − m1 v1 = −IF
0
�
τ
(7.4.10)
m2 ẍ2 dt = m2 l ω0 = IF − IH
0
�τ
I ϕ̈ dt = I ω0 = IF h
0
dove IF e IH sono gli impulsi in direzione orizzontale associati alle rispettive forze e si sono espresse
le velocità finali in termini di ω0 come nello studio precedente. Se ricaviamo IF dalla terza delle
(7.4.10) e lo sostituiamo nella seconda otteniamo I ω0 = m1 h v1 − m1 h2 ω0 , ossia di nuovo la
(7.4.5), a conferma della validità del metodo. Se nella seconda delle (7.4.10) poniamo IH = 0 e
sostituiamo il valore di IF ricavato dalla terza abbiamo
m1 l ω0 =
I
ω0
h
⇒
h=
I
m2 l
(7.4.11)
Se il proiettile inciderà alla distanza h dal centro di sospensione data dalla (7.4.11) l’impulso della
forza H risulterà nullo e quindi il vincolo non sarà cimentato. Si noti che l’espressione di h dipende
da quantità caratteristiche del pendolo, ma né dalla massa né dalla velocità del proiettile. La quota
h data dalla (7.4.11) definisce dunque una proprietà generale del dato pendolo balistico, ossia il
punto in cui si può colpire senza sollecitare il perno, detto centro di percussione.
7.4.2 Fisica del biliardo
Le palle da biliardo che si muovono e si urtano su un piano orizzontale danno luogo a molti
fenomeni che si possono studiare con le nostre conoscenze di fisica. Vogliamo qui analizzare solo
alcuni dei casi più semplici. Il primo sarà lo studio di quello che succede quando una palla di biliardo
di massa m e raggio r viene colpita con una stecca. Per semplicità ci limiteremo ai tiri in cui la
stecca viene mossa su una linea orizzontale, parallela al piano del biliardo, e la biglia viene colpita
nel piano verticale mediano (vedi fig. 7.4.3). La forza applicata dalla stecca alla biglia è orizzontale
e, con il sistema di riferimento scelto, è data da F = F i; nel punto di contatto della biglia col
piano si sviluppano una reazione verticale V ed una orizzontale H. La reazione verticale non è
evidentemente cimentata dall’urto e si limita a compensare la forza peso, V = m g, mentre quella
215
7.4.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
verticale, essendo dovuta all’attrito, deve sottostare a una delle due relazioni: |H| ≤ µs |V | nel
caso statico o |H| = µd |V | nel caso dinamico. I coefficienti d’attrito valgono � 0.6, per cui la forza
d’attrito è limitata a una frazione della forza peso della palla e non risulta impulsiva. Le cose vanno
diversamente se il giocatore colpisce la biglia con la stecca inclinata verso il basso: in questo caso
la forza impulsiva della stecca ha una componente verticale, per cui risulta cimentata la reazione
verticale V e, di conseguenza, anche H. Il movimento successivo della biglia può allora deviare da
una traiettoria rettilinea e si hanno i cosiddetti effetti; questi diventano particolarmente evidenti
se la stecca è quasi verticale, come nella tecnica detta del massé con cui si riescono a ottenere
traiettorie curve e/o un ritorno indietro della biglia.
y
a)
F
h
C
O
H
V
b)
ϕ
2
x
1
Q
Fig. 7.4.3: Una palla di biliardo viene colpita con la stecca orizzontale. In a) la sezione trasversa e in b) la
vista dall’alto: nel caso 1 la stecca si muove in un piano verticale che contiene il centro della biglia, tratteggiato in
rosso, ed abbiamo un colpo centrato, la situazione studiata nel testo; nel caso 2 la stecca non si muove in un piano
non contenente il centro della biglia e a questa viene comunicato un effetto.
Vogliamo anzitutto studiare il moto della biglia immediatamente dopo il colpo di stecca; le forze
agenti sulla biglia sono tutte nel piano verticale che contiene il centro di essa e la traiettoria della
stecca, per cui il moto immediatamente dopo il colpo si manterrà in tale piano e per studiarlo
dovremo considerare solo la velocità ẋ del centro C e la velocità angolare4 ω = −ϕ̇ k. Scriviamo
per la biglia la prima equazione cardinale in direzione X e la seconda cardinale in direzione −Z,
con centro di riduzione in C
�
m ẍ = F − H
(7.4.12)
I ϕ̈ = F h + H r
Dove I è il momento d’inerzia della biglia rispetto al centro e risulta I = (2/5) m r2 (vedi 4.8.5).
Integriamo le (7.4.12) come abbiamo fatto per le equazioni del pendolo balistico, trascurando
l’impulso di H che, come detto, non risulta impulsiva. Ricordando che la biglia è inizialmente
ferma e indicando con v0 e ω0 i valori, rispettivamente, di ẋ e ϕ̇ immediatamente dopo l’urto
otteniamo
�
m v0 = IF
(7.4.13)
I ω0 = IF h
Dove IF è l’impulso trasmesso dalla stecca alla biglia. La condizione di rotolamento puro, con
i versi scelti per gli spostamenti lineari e angolari, è ẋ = r ϕ̇: la biglia si troverà dopo l’urto in
4
Per questo problema abbiamo preferito scegliere il verso delle rotazioni come orario perché rende molto più intuitivo
lo studio del moto successivo.
7.4.2
216
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
condizione di rotolamento puro se v0 = ω0 r ossia
v0 = ω0 r
⇒
IF
IF h r
=
m
I
h = h0 =
⇒
I
2
= r
mr
5
(7.4.14)
La (7.4.14) è esattamente equivalente alla (7.4.11) e mostra che anche per la biglia esiste un centro di
percussione, colpendo il quale, indipendentemente dall’entità dell’urto, ossia dall’impulso trasferito
dalla stecca, il moto immediatamente successivo rispetta le condizioni di rotolamento puro. Se si
verifica questa condizione immediatamente dopo l’urto, nel moto successivo, non essendoci forze
che tendano ad accelerare o frenare il centro di massa, il moto della biglia è rettilineo e uniforme e
il rotolamento puro si mantiene senza che si debba sviluppare una forza d’attrito H nel punto di
contatto con il piano.5
Se invece h �= h0 la velocità del centro di massa della biglia e la sua velocità angolare, immediatamente dopo l’urto, non consentiranno il rotolamento puro. Vogliamo studiare il moto della
biglia dopo l’urto in queste condizioni. Data una velocità iniziale del centro della biglia v0 (ossia
data l’entità del colpo di stecca da cui questa deriva), dalle (7.4.13) si ricava
r ω0 =
m v0 h r
5 h
5
= v0 = β v0
I
2
r
2
(7.4.15)
dove abbiamo introdotto il parametro β = h/r, che idealmente può variare nell’intervallo −1 ≤
β ≤ 1, corrispondente a punti di impatto della stecca fra l’altezza del piano fino alla sommità della
biglia (in pratica le dimensioni finite della stecca limitano l’intervallo di altezza del colpo a una
zona non troppo sotto o sopra la quota del centro della biglia).
Se indichiamo con t = 0 l’attimo immediatamente dopo l’urto avremo che la velocità vQ del
punto di contatto della biglia con il piano sarà inizialmente vQ (0) = (v0 −r ω0 ) i = [ 1−(5/2) β ] v0 i.
Quindi, in fig. 7.4.3, la velocità del punto di contatto Q immediatamente dopo l’urto è diretta verso
destra se β < 2/5 e verso sinistra se β > 2/5. In entrambi i casi avremo attrito dinamico. La
prima equazione cardinale in direzione verticale per la biglia dà
0 = V − mg
⇒
�
V = mg
|H| = µ m g
(7.4.16)
dove abbiamo utilizzato la relazione generale dell’attrito dinamico (3.7.3). Se β < 2/5 il punto di
contatto inizialmente striscia verso destra e la forza d’attrito risulta diretta verso sinistra, come
in figura. Possiamo scrivere la prima cardinale in direzione orizzontale e la seconda cardinale, con
centro in C, per la biglia
�
5
m ẍ = −H = −µ m g
I ϕ̈ = H r = µ m g r
⇒
ẍ = −µ g
r ϕ̈ = µ m g r2 =
I
5
2
(7.4.17)
µg
Stiamo trascurando il fatto che in realtà sulla biglia, oltre che l’attrito dell’aria, agisce anche un attrito volvente,
derivante dal contatto biglia–piano non puntiforme e dal conseguente sviluppo di una coppia di forze d’attrito che
ostacolano la rotazione, facendo lavoro negativo e sottraendo energia cinetica alla biglia. Di ciò si deve evidentemente
tenere conto, come della non perfetta elasticità degli urti sulle sponde, per spiegare il rallentamento progressivo e
la fermata della biglia; nondimeno lo studio del moto immediatamente dopo il colpo di stecca che faremo in questa
approssimazione dà risultati sostanzialmente corretti.
217
7.4.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Le (7.4.17) si integrano facilmente, con le condizioni iniziali trovate ẋ(0) = v0 , r ϕ̇(0) =
ẋ = v0 − µ g t
r ϕ̇ =
5
2
β v0 +
5
2
5
2
β v0
(7.4.18)
µgt
L’attrito dinamico quindi fa diminuire nel tempo la velocità del centro di massa e aumentare la
velocità angolare. Ad un certo istante t i due termini della (7.4.18) arriveranno a coincidere
5
5
v0 − µ g t = β v0 + µ g t
2
2
�
�
2 v0 1 − 52 β
t=
7µg
⇒
(7.4.19)
Corrispondentemente per t = t avremo
ẋ(t) = r ϕ̇(t) =
5
v0 (1 + β)
7
(7.4.20)
In questo momento fra la velocità del centro di massa e quella angolare è soddisfatta la relazione
di rotolamento puro. Il punto di contatto fra ruota e piano è fermo e, per il ragionamento già
fatto nel caso β = 2/5, la biglia comincerà a muoversi di rotolamento puro con velocità del centro
di massa e angolare costanti (se trascuriamo l’attrito volvente e dell’aria). L’andamento del moto
della biglia in questo caso è visualizzato dal diagramma di sinistra di fig. 7.4.4, dove sono presentati
i risultati per vari valori di β con −1 ≤ β ≤ 2/5.
Β$
#v, r Ω$ !m s "
!1
2
Β%
%v, r Ω& !m s "
10
5
!1
2
5
4
8
2
0.2
0.4
0.6
0.8
t !s"
6
!2
4
!4
!6
2
!8
!10
0.0
0.2
0.4
0.6
0.8
t !s"
Fig. 7.4.4: Moto della palla di biliardo dopo essere stata colpita dalla stecca. Nel grafico di sinistra
sono disegnate in rosso la velocità del centro di massa e in verde il prodotto della velocità angolare
per il raggio (fino al momento in cui eguaglia la prima velocità), per diversi valori del parametro β
corrispondenti a altezze diverse della stecca: −1,−0.5, −0.2, 0, 0.2, 0.4. Si considera una velocità iniziale
del centro della biglia di 3 m · s−1 e un coefficiente di attrito µ = 0.6. Il grafico di destra rappresenta
l’andamento delle velocità per valori di β pari a 0.4, 0.6, 0.8, 1.
Dal grafico vediamo che se β < 0 (biglia colpita al di sotto della quota del centro) la velocità
angolare iniziale è nel senso opposto a quello necessario per il rotolamento puro con spostamento
verso destra. Il centro di massa della biglia rallenta prima di raggiungere la velocità per cui si
“innesca” il rotolamento puro; comunque, anche se fosse possibile colpire praticamente la biglia
con β = −1 si arriverebbe a una velocità finale nulla, il che significa che con la stecca orizzontale
non è possibile colpire la biglia in modo che vada avanti, rallenti e torni indietro da sola.
7.4.2
218
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Nel caso β > (2/5) la velocità iniziale del punto di contatto Q è diretta verso sinistra, per cui
la forza d’attrito risulta H = −µ m g, ossia nel verso opposto a quello disegnato in figura. Le
equazioni di moto sono del tutto analoghe alle (7.4.17) e (7.4.18), ma i termini che contengono µ
hanno segno opposto a prima. Abbiamo in particolare
ẋ = v0 + µ g t
r ϕ̇ =
5
2
β v0 −
5
2
⇒
µgt
t=
2 v0
�5
β−1
7µg
2
�
(7.4.21)
Le velocità al momento in cui inizia il rotolamento puro sono ancora date dalla (7.4.20); il moto è
visualizzato nel grafico di destra di fig. 7.4.4. Vediamo che in questo caso il centro di massa della
biglia accelera dopo il colpo di stecca e raggiunge il rotolamento puro con una velocità maggiore di
quella che aveva subito dopo l’urto; al contempo la velocità angolare diminuisce rispetto a quella
iniziale. Dalla fig. 7.4.4 si vede che, con i valori di velocità iniziale e attrito dati, il rotolamento
<
puro viene raggiunto in un tempo t <
∼ 0.5 s corrispondente a spostamenti ∆x ∼ 0.7 m.
Vogliamo ora analizzare un altro elemento fondamentale del biliardo, ossia l’urto della biglia con
la sponda. In prima approssimazione trascuriamo l’attrito fra biglia e sponda, assumendo quindi
la forza d’urto perpendicolare alla sponda, e consideriamo l’urto perfettamente elastico.
a)
b)
y
vf
F
αf
α
αi
vi
O
vf ωg
vi
N
T
x
Fig. 7.4.5: Urto di una palla di biliardo con la sponda, visto dall’alto. In a) si trascura l’attrito
fra biglia e sponda e si considera l’urto completamente elastico. Sono indicate le velocità del centro
della biglia immediatamente prima e dopo l’urto. In b) è rappresentato un modello più realistico del
fenomeno: l’urto non è più perfettamente elastico e la palla, essendo stata colpita con la stecca a sinistra
del piano verticale mediano, ha una componente di velocità angolare in direzione verticale, indicata da
ωg . Conseguentemente la forza d’urto che si sviluppa ha anche una componente tangenziale alla sponda.
La situazione è rappresentata nella fig. 7.4.5 a, dove la biglia è vista dall’alto nel momento
dell’urto. L’urto elastico implica che |vf | = |vi |, mentre la forza d’urto perpendicolare alla sponda
fa sı̀ che si conservi, nel sistema di riferimento indicato, la componente Y della quantità di moto, e
quindi della velocità. Se dunque vi = vix i + viy j e corrispondentemente vf = vf x i + vf y j avremo
vf y = viy
2
2
vf2 x + vf2 y = vix
+ viy
⇒
vf x = ±vix
(7.4.22)
La soluzione vf x = vix corrisponderebbe alla biglia che penetra nella sponda senza interagire, e non
è quindi fisicamente accettabile, anche se ovviamente obbedisce ai principi di conservazione. Resta
219
7.4.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
la soluzione vf x = −vix . Questo risultato comporta che se la biglia arriva alla sponda formando
un angolo α con la perpendicolare ad essa, ripartirà dopo l’urto formando ancora un angolo α, ma
dalla parte opposta, come un raggio di luce che si riflette in uno specchio.
Questa è solo un’approssimazione di quello che avviene durante l’urto fra biglia e sponda: innanzi
tutto l’urto non è perfettamente elastico e comporta quindi una diminuzione di velocità del centro
della biglia, mentre non si può del tutto trascurare l’attrito fra biglia e sponda, soprattutto se il
giocatore nel colpire la palla con la stecca le ha dato il cosiddetto effetto o giro. Questo avviene
quando il giocatore colpisce la palla muovendo la stecca in un piano verticale che non contiene il
centro, ma è spostato a destra o a sinistra; la situazione che ne consegue è visualizzata in fig. 7.4.5
b. Se supponiamo che il giocatore abbia colpito la biglia come nel caso 2 della fig. 7.4.3 b, ossia
a sinistra del piano mediano, questa avrà acquistato anche una componente di velocità angolare
in direzione verticale, indicata come ωg in fig. 7.4.5 b. In pratica, la biglia, vista dall’alto, oltre
che muoversi verso la sponda girerà in senso orario (o in senso antiorario se colpita a destra del
piano mediano). Durante l’urto con la sponda si produce una forza impulsiva N perpendicolare a
questa e se µ è il coefficiente d’attrito dinamico fra biglia e sponda, si produrrà anche una forza
tangenziale |T | = µ |N |, diretta come in figura. Questa componente farà sı̀ che l’angolo di uscita
della biglia da sponda sia αf > αi . Se il giocatore avesse colpito la biglia dandogli il giro a destra,
la forza T sarebbe stata diretta nel senso opposto e avremmo avuto αf < αi . Imprimendo una
dose sufficiente di quest’ultimo tipo di giro si può riuscire addirittura a far rimbalzare la palla
dalla stessa parte della normale alla sponda, anziché da parte opposta. Un’analisi quantitativa del
fenomeno sarebbe al di sopra del livello di questo testo.
Come ultimo aspetto del biliardo vogliamo studiare l’urto fra due biglie, nell’approssimazione che
questo risulti elastico e che si possano trascurare forze tangenziali; ci interesseremo in particolare
degli urti dove una delle biglie è inizialmente ferma. Prima di tutto consideriamo un urto centrato,
in cui la traiettoria del centro della biglia “battente” punta verso quello della biglia ferma. In questo
caso valgono le relazioni (7.3.6) e in particolare, data l’uguaglianza delle masse delle biglie, avremo
che dopo l’urto il centro di massa della battente è fermo mentre quello della biglia colpita acquista
la velocità che aveva prima il centro della battente. Tuttavia l’aspetto più interessante riguarda le
velocità angolari che, nell’approssimazione di forza d’urto normale, rimangono inalterate nell’urto.
La biglia battente quindi, se aveva raggiunto il rotolamento puro, dopo l’urto avrà il centro di
massa fermo ma una velocità angolare non nulla. Il moto ha andamento simile a quello della biglia
colpita dalla stecca e può essere studiato nello stesso modo che ha portato alle equazioni dalla
(7.4.17) alla (7.4.21): se in particolare la biglia battente arriva con rotolamento puro e velocità
del centro v1i , dopo l’urto il centro di massa accelererà da fermo fino a raggiungere il rotolamento
puro con velocità (2/7) v1i . Se invece la biglia battente colpisce quando non ha ancora raggiunto il
rotolamento puro dopo il colpo di stecca iniziale (cosa che avviene più facilmente se le biglie erano
già vicine prima di esso) possono aversi comportamenti diversi. In particolare, se arriva priva di
rotazione rimarrà ferma dopo l’urto e se arriva con una rotazione in senso opposto a quella del
rotolamento puro tornerà indietro. La biglia colpita subito dopo l’urto ha velocità angolare nulla
e raggiunge il rotolamento con velocità del centro pari a (5/7) v1i .
Se l’urto non è centrato avremo la situazione di fig. 7.4.6. Il centro C1 della biglia battente ha
una traiettoria che non punta sul centro C2 della biglia ferma. Tracciamo una retta passante per
C2 parallela alla traiettoria di C1 . La distanza fra le due rette, b in figura, si dice parametro d’urto.
Se b > 2 r, con r raggio delle biglie, ovviamente non si ha urto. Se b < 2 r l’urto avviene quando la
distanza C1 C2 si riduce a 2 r. Nella nostra approssimazione le forze d’urto sono dirette lungo la
congiungente i centri e formano un angolo θ2 = arcsin(b/2 r) con la direzione iniziale della biglia
battente. La seconda biglia, inizialmente ferma e soggetta alla forza F21 , dopo l’urto si muoverà
nella direzione della forza, per cui la sua velocità v2f formerà un angolo θ2 con la direzione della
velocità v1i della biglia battente prima dell’urto. Applicando i risultati trovati in 7.3.2 si possono
determinare anche la direzione della velocità v1f e i moduli delle velocità finali. Si trova che le
7.4.2
220
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
V1f
C1
V2f
θ1
V1i
b F12
F21
C2
θ2
V2f
Fig. 7.4.6: Urto fra due biglie, visto dall’alto. La biglia di centro C2 è inizialmente ferma. La
biglia di centro C1 ha velocità iniziale v1i e la sua traiettoria non punta a C2 . Se tracciamo una retta
parallela alla traiettoria iniziale della biglia battente e passante per C2 , la sua distanza dall’altra, b, è il
parametro d’urto. In figura è mostrata anche la relazione fra la velocità iniziale della biglia battente e
quelle dopo l’urto.
µw
θ1
mvG
2f
mv
f
mv 1
f
velocità finali delle biglie costituiscono i cateti di un triangolo rettangolo avente per ipotenusa la
velocità iniziale v1i .
Θ
mvG
θ2
Fig. 7.4.7: Diagramma delle velocità per l’urto di due biglie, caso particolare di quelli presentati
in fig. 7.3.3, con m1 = m2 . Si deduce che le velocità delle biglie dopo l’urto costituiscono i cateti di
un triangolo rettangolo avente come ipotenusa la velocità iniziale della biglia battente (2 m vG = m v1i ).
Gli angoli di deflessione delle biglie sono da parti opposte rispetto alla direzione della battente prima
dell’urto e non superano il valore π/2. Le velocità finali delle biglie sono sempre perpendicolari fra loro.
In fig. 7.4.7 è rappresentato un diagramma analogo a quelli di fig. 7.3.3, nel caso particolare in
cui m1 = m2 . La relazione enunciata fra le velocità prima e dopo l’urto risulta evidente. Vediamo
quindi che le velocità delle biglie immediatamente dopo l’urto formano sempre un angolo di π/2
fra loro. Naturalmente anche per l’urto non centrato dopo la collisione si avrà un “riassesto” fra
le velocità angolari e quelle dei centri di massa fino al raggiungimento del rotolamento puro.
221
7.4.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
222
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Appendice
Questa parte del testo contiene un formulario essenziale di trigonometria, che potrà essere
consultato dagli studenti durante le prove scritte. Nell’appendice vengono inoltre trattati argomenti
che non costituiscono parte integrante del programma del corso, ma sono presentati per motivi di
completezza.
A.1 Formulario di trigonometria
Quanto segue ha la forma di un breve prontuario; tuttavia ogni formula viene anche dimostrata,
perché la matematica deve essere compresa più che imparata a memoria.
A.1.1 Definizioni
Le funzioni trigonometriche sono definite in base al cerchio goniometrico, mostrato in fig. A.1.1.
y
P
r
α
x
O
Fig. A.1.1: Cerchio goniometrico per la definizione delle funzioni trigonometriche.
In un sistema cartesiano piano è tracciata una circonferenza di raggio r centrata nell’origine. A
ogni punto P sulla circonferenza corrisponde un valore dell’angolo α formato dalla congiungente
OP con l’asse X misurato in senso antiorario. se (x, y) sono le coordinate di P, definiamo le
223
A.1.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
funzioni trigonometriche1
y
r
x
cos α =
r
sin α
y
tan α =
=
cos α
x
sin α =
(A.1.1)
Dalla definizione si ricavano immediatamente alcune proprietà:
a. Le funzioni sin α e cos α sono periodiche con periodo 2π e variano nell’intervallo [−1, 1]. La
funzione tan α è periodica con periodo π e assume tutti i valori reali. La funzione tan α diverge
per α = π/2 e α = 3 π/2, tendendo a +∞ a sinistra e a −∞ a destra dei punti di divergenza.
b. Le funzioni sin α e cos α hanno andamento analogo, semplicemente spostato lungo l’asse delle
ascisse. Vale la relazione cos α = sin(α + π/2).
c. Le funzioni sin α e tan α sono dispari, ossia sin(−α) = − sin α e tan(−α) = − tan α, mentre la
funzione cos α è pari: cos(−α) = cos α.
d. Dal teorema di Pitagora abbiamo la relazione fondamentale
sin2 α + cos2 α = 1
(A.1.2)
∀α
L’andamento delle funzioni è mostrato in fig. A.1.2.
sin!Α"
1.0
0.5
1
2
3
4
5
6
4
5
6
Α
"0.5
"1.0
cos!Α"
1.0
0.5
Out[41]=
1
2
3
Α
"0.5
"1.0
tan!Α"
6
4
2
1
2
3
4
5
6
Α
"2
"4
"6
Fig. A.1.2: Grafici delle funzioni sin α, cos α, tan α nell’intervallo 0 ≤ α ≤ 2 π.
1
È normale uso non circondare necessariamente l’argomento di una funzione trigonometrica con parentesi tonde:
sin x = sin(x). Le parentesi si devono usare quando in loro assenza potrebbero sorgere ambiguità riguardo all’argomento della funzione.
A.1.1
224
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Dalla relazione (A.1.2) si ricavano le formule
sin α =
�√
1 − cos2 α
0≤α≤π
√
− 1 − cos2 α π ≤ α ≤ 2π
(A.1.3)
��
1 − sin2 α
0 ≤ α ≤ π/2 3π/2 ≤ α ≤ 2π
�
cos α =
− 1 − sin2 α π/2 ≤ α ≤ 3π/2
Le formule (A.1.3) presentano un cambio di segno a seconda dei quadranti, per cui è conveniente
usarle solo quando non sussistano possibili ambiguità.
A.1.2 Traslazione di angoli
Dalle definizioni si determinano formule per il calcolo delle funzioni trigonometriche quando
l’angolo viene traslato di valori particolari o cambiato di segno, mostrate in tab. A.1.1.
−α
π
2
π
2
−α
+α
π−α
π+α
sin
− sin α
cos α
cos α
sin α
− sin α
cos
cos α
sin α
− cos α
− cos α
tan
− tan α
1
tan α
− sin α
− tan α
tan α
1
− tan
α
Tab. A.1.1: Tabella per il calcolo delle funzioni trigonometriche con l’argomento traslato di valori
particolari o cambiato di segno.
A.1.3 Formule di addizione e sottrazione
Vogliamo ricavare formule per le funzioni trigonometriche relative alla somma o sottrazione di
angoli. Per farlo il metodo più semplice è usare il formalismo vettoriale.
In fig. A.1.3 abbiamo due sistemi cartesiani piani con la stessa origine, di cui il sistema X � OY �
risulta ruotato di un angolo α rispetto al sistema XOY . Il versore u forma un angolo β con l’asse
X � e si può quindi esprimere come
u = cos β i� + sin β j�
(A.1.4)
dove i� e j� sono rispettivamente i versori degli assi X � e Y � . Lo stesso versore u si può esprimere
nel sistema XOY come
u = cos(α + β) i + sin(α + β) j
(A.1.5)
I versori degli assi X � e Y � si possono a loro volta esprimere nell’altro sistema di riferimento come
i� = cos α i + sin α j
j� = − sin α i + cos α j
225
(A.1.6)
A.1.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
y
y'
u
β
x'
α
x
O
Fig. A.1.3: Il versore
rispetto all’altro.
u
è rappresentato nei due sistemi di riferimento, ruotati di un angolo α uno
Se sostituiamo le espressioni (A.1.6) nella (A.1.4) abbiamo
u = cos β (cos α i + sin α j) + sin β (− sin α i + cos α j) =
= (cos α cos β − sin α sin β) i + (sin α cos β + cos α sin β) j
(A.1.7)
Uguagliando le componenti di u date dalle (A.1.5) e (A.1.7) abbiamo le formule di somma per seno
e coseno
sin(α + β) = sin α cos β + cos α sin β
(A.1.8)
cos(α + β) = cos α cos β − sin α sin β
Se nelle (A.1.8) sostituiamo β con −β e teniamo conto della parità delle funzioni abbiamo subito
le formule di sottrazione
sin(α − β) = sin α cos β − cos α sin β
(A.1.9)
cos(α − β) = cos α cos β + sin α sin β
Scrivendo la tangente come rapporto fra seno e coseno e dividendo numeratore e denominatore per
cos α cos β si determinano anche le formule di addizione per la terza funzione trigonometrica
tan(α + β) =
tan(α − β) =
A.1.3
tan α + tan β
1 − tan α tan β
tan α − tan β
1 + tan α tan β
226
(A.1.10)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
A.1.4 Formule di duplicazione e bisezione
Le formule di duplicazione sono un caso particolare delle formule di somma, con β = α. Si ha
immediatamente
sin 2α =2 sin α cos α
(A.1.11)
cos 2α = cos α − sin α
2
2
Per ricavare la formula di bisezione del seno facciamo la sostituzione cos2 α = 1 − sin2 α nella
seconda delle (A.1.11) e abbiamo cos 2α = 1 − 2 sin2 α; facendo la sostituzione sin2 α = 1 − cos2 α
si ottiene cos 2α = 2 cos2 α − 1. Dalle espressioni trovate di determina che
sin
cos
α
=±
2
�
1 − cos α
2
α
=±
2
�
1 + cos α
2
(A.1.12)
Anche le formule di bisezione presentano ambiguità di segno e vanno usate tenendo conto dei
quadranti in cui si trovano gli angoli.
A.1.5 Formule di prostaferesi
Le formule di prostaferesi permettono di esprimere il prodotto di due funzioni trigonometriche,
seno o coseno, come somma di altre due funzioni trigonometriche. Si ottengono per inversione dalle
relazioni (A.1.8) e (A.1.9). Abbiamo
sin α sin β =
1
[cos(α − β) − cos(α + β)]
2
cos α cos β =
1
[cos(α − β) + cos(α + β)]
2
sin α cos β =
1
[sin(α − β) + sin(α + β)]
2
(A.1.13)
A.1.6 Risoluzione dei triangoli
Diamo alcune formule che mettono in relazione gli elementi di un triangolo. Cominciamo da un
triangolo rettangolo, secondo la nomenclatura di fig. A.1.4.2
2
Nella nomenclatura degli elementi di un triangolo è convenzione indicare i vertici con caratteri maiuscoli, le lunghezze
dei lati con caratteri minuscoli e gli angoli con lettere greche. Inoltre si scelgono le lettere in modo da far corrispondere
il nome di ciascun un vertice con quello dell’angolo al medesimo e del lato opposto.
227
A.1.6
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
a)
β
γ1
i
c
a
c2
γ2
C
B
b)
B
α
γ
c1
A
H
C
b
A
Fig. A.1.4: Gli elementi di un triangolo. In a) quelli di un triangolo rettangolo, in b) quelli di un
triangolo qualunque.
c2 = i cos γ1 = i sin γ2
c1 = i cos γ2 = i sin γ1
c2 = c1 tan γ2
(A.1.14)
Queste formule sono di uso cosı̀ comune che lo studente dovrebbe poterle ricordare immediatamente
alla bisogna.
La fig. A.1.4 b ci permette di dimostrare due importanti teoremi sui triangoli qualsiasi. Il primo
è il cosiddetto teorema dei seni. Possiamo esprimere l’altezza BH in due modi
BH = a sin γ = c sin α
a
c
=
sin α
sin γ
⇒
(A.1.15)
Lo stesso procedimento può essere esteso anche alle altezze relative agli altri due lati e si ottiene
a
b
c
=
=
sin α
sin β
sin γ
(A.1.16)
ossia: le lunghezze dei lati di un triangolo stanno tra loro come i seni degli angoli rispettivamente
opposti.
Il secondo teorema che vogliamo provare è il teorema di Carnot, che serve a determinare un lato
di un triangolo quando siano noti gli altri due e l’angolo compreso. Esso si basa sul teorema di
Pitagora
2
2
2
AB = BH + AH
(A.1.17)
Possiamo calcolare facilmente i due cateti: BH = a sin γ, AH = |b − a cos γ|. Aver introdotto il
valore assoluto nella seconda espressione la rende valida anche nel caso in cui α > π/2. Avremo
quindi
c2 = (a sin γ)2 + (b − a cos γ)2
c=
⇒
�
a2 + b2 − 2 a b cos γ
(A.1.18)
Con un ragionamento analogo si dimostra che il teorema di Carnot vale anche nel caso in cui
γ > π/2
A.1.6
228
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
A.1.7 Equivalenza di funzioni trigonometriche
Abbiamo già rilevato che le funzioni trigonometriche seno e coseno hanno lo stesso andamento
e si differenziano solo per una traslazione dell’argomento. Vogliamo dimostrare una proprietà
abbastanza banale, che però si rivela utile in molti casi. Consideriamo le funzioni
A sin(x + ϕ)
A cos(x + ψ)
B sin(x) + C cos(x)
(A.1.19)
Vogliamo dimostrare che con opportuna scelta dei parametri A, ϕ, ψ, B e C ciascuna delle tre
forme corrisponde a una stessa funzione e che esse quindi sono equivalenti e rappresentano ciascuna
il modo più generale in cui si può scrivere una funzione ad andamento sinusoidale in senso lato,
come ad esempio l’andamento della posizione di un punto che si muove di moto armonico in una
direzione. L’equivalenza fra le prime due forme risulta dall’identità sin(α + π/2) = cos α, per cui
si ha sin(x + ψ + π/2) = cos(x + ψ) da cui
ϕ=ψ+
π
2
ψ =ϕ−
π
2
(A.1.20)
Per dimostrare l’equivalenza fra la prima forma e la terza usiamo la formula di addizione A sin(x +
ϕ) = A sin x cos ϕ + A cos x sin ϕ da cui
�
�
B = A cos ϕ
C = A sin ϕ
√
A = B2 + C 2
ϕ = arctan(B, C)
(A.1.21)
dove arctan(B, C) è introdotta in A.1.9. Analogamente si ha A cos(x + ψ) = A cos x cos ψ −
A sin x sin ψ da cui
�
�
√
B = −A sin ψ
A = B2 + C 2
(A.1.22)
C = A cos ψ
ψ = arctan(C, −B)
A.1.8 Funzioni trigonometriche e calcolo infinitesimale
Diamo le formule fondamentali per la derivazione e l’integrazione delle funzioni trigonometriche.
Per ricavarle dimostriamo il valore di un limite fondamentale, ossia che
lim
x→0
sin x
=1
x
(A.1.23)
La dimostrazione si ottiene con riferimento alla fig. A.1.5
In fig. A.1.5 abbiamo un arco di cerchio AB di centro O e raggio unitario, corrispondente
a un angolo al centro x, con 0 < x < π/2. Da B è tracciata la perpendicolare a OA, che
incontra il segmento in H, mentre un’ulteriore perpendicolare a OA è tracciata da A e incontra
�
il prolungamento di OB in C. Abbiamo BH = sin x, AB = x, AC = tan x. Inoltre l’area del
�
triangolo OAB vale OA·BH/2 = sin(x)/2; l’area del settore circolare corrispondente all’arco AB
229
A.1.8
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
C
B
x
O
H
A
Fig. A.1.5: Schema per la dimostrazione del limite di sin x/x per x → 0.
2
vale π OA x/(2π) = x/2; infine, l’area del triangolo OAC vale OA · AC/2 = tan(x)/2. Le tre
aree, nell’ordine in cui le abbiamo citate, risultano ognuna più grande dalla precedente, come si
vede immediatamente considerando che il primo triangolo è contenuto nel settore che a sua volta
è contenuto nel secondo triangolo. Abbiamo quindi le relazioni
sin x < x < tan x
⇒
1<
x
1
<
sin x
cos x
⇒
cos x <
sin x
<1
x
(A.1.24)
I passaggi nelle disequazioni sono corretti in quanto tutte le quantità sono positive. Le disuguaglianze (A.1.24) valgono per ogni valore di x con 0 < x < π/2 e quindi anche al limite per
x → 0. Andando al limite cos x → 1, il valore 1 ovviamente non varia e quindi il limite di sin(x)/x,
dovendo rimanere compreso fra gli altri due, deve andare a 1. Risulta quindi dimostrata la (A.1.23).
Si noti che l’area del settore circolare vale x/2 solo se x è la misura dell’angolo in radianti: da
qui risulta che tutte le formule seguenti sono valide esclusivamente se gli angoli sono espressi in
radianti. Dimostriamo poi un altro limite che ci sarà indispensabile
1 − cos x
=0
x
(A.1.25)
1 − cos x
1 − cos x 1 + cos x
sin2 x
= lim
= lim
=
x→0
x
x
1 + cos x x→0 x (1 + cos x)
sin x
sin x
= lim
lim
=0
x→0
x x→0 1 + cos x
(A.1.26)
lim
x→0
Per la dimostrazione si opera come segue
lim
x→0
Dimostrati i teoremi risulta facile determinare la derivata di sin x
d sin x
sin(x + h) − sin(x)
sin(x) cos(h) + cos(x) sin(h) − sin(x)
= lim
= lim
=
h→0
h→0
dx
h
h
cos(h) − 1
sin(h)
= sin(x) lim
+ cos(x) lim
= cos(x)
h→0
h→0
h
h
A.1.8
230
(A.1.27)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Analogamente
d cos x
cos(x + h) − cos(x)
cos(x) cos(h) − sin(x) sin(h) − cos(x)
= lim
= lim
=
h→0
h→0
dx
h
h
cos(h) − 1
sin(h)
= cos(x) lim
− sin(x) lim
= − sin(x)
h→0
h→0
h
h
(A.1.28)
Si può a questo punto determinare facilmente la derivata di tan x
d tan x
d
=
dx
dx
�
sin x
cos x
�
=
cos x
sin x
sin2 x
1
+ sin x
=
1
+
=
cos x
cos2 x
cos2 x
cos2 x
(A.1.29)
Le funzioni primitive di seno e coseno risultano immediatamente dalle derivate
�
�
sin x dx = − cos x + C
cos x dx = sin x + C
(A.1.30)
d cos x
= − log (| cos x|) + C
cos x
(A.1.31)
Per la primitiva di tan x si ha
�
tan x dx =
�
sin x
dx = −
cos x
�
A.1.9 Funzioni trigonometriche inverse
Le funzioni trigonometriche inverse hanno come argomento il valore di una funzione trigonometrica e come risultato l’angolo a cui corrisponde tale valore.
arcsin!x"
1.5
1.0
0.5
!1.0
!0.5
0.5
1.0
x
!0.5
!1.0
!1.5
Fig. A.1.6: La funzione arcsin(x).
231
A.1.9
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
arccos!x"
3.0
2.5
2.0
1.5
1.0
0.5
!1.0
!0.5
0.5
1.0
x
Fig. A.1.7: La funzione arccos(x).
Le funzioni trigonometriche dirette, essendo periodiche, hanno lo stesso valore per valori diversi
dell’argomento e quindi possono essere invertite solo scegliendo convenzionalmente un intervallo
angolare in cui risultano monotone. Nel caso della funzione arcsin, l’inversa del seno, si sceglie
l’intervallo [−π/2, π/2] e si ha una funzione crescente il cui argomento può variare nell’intervallo
−1 ≤ x ≤ 1. La funzione è visualizzata in fig.A.1.6.
Per la funzione arccos si sceglie l’intervallo [0, π] e si ha una funzione decrescente il cui argomento
può variare in −1 ≤ x ≤ 1. La funzione è mostrata in fig. A.1.7.
arctan!x"
1.5
1.0
0.5
!10
!5
5
10
x
!0.5
!1.0
!1.5
Fig. A.1.8: La funzione arctan(x).
Per la funzione arctan si sceglie l’intervallo (−π/2, π/2) e si ha una funzione crescente definita
per tutti i valori reali dell’argomento, con limiti arctan(x) → −π/2 per x → −∞, arctan(x) → π/2
per x → +∞. La funzione è mostrata in fig. A.1.8.
La funzione arctan è la più usata in pratica, in quanto serve per calcolare l’angolo ϕ delle
coordinate polari piane a partire dalle coordinate cartesiane x, y. Spesso nei testi si trova la
relazione ϕ = arctan(y/x) che però non è corretta perché, data la definizione di arctan(x), dà un
risultato limitato ai quadranti I e IV, mentre ϕ può avere qualsiasi valore nell’intervallo 0 ≤ ϕ ≤ 2 π.
Diversi linguaggi di programmazione presentano una variante della funzione arctan avente per
argomenti i valori delle coordinate x e y, che fornisce il risultato corretto. Se si ha a disposizione,
ad esempio, un calcolatore tascabile che sa calcolare solo arctan(y/x) si può comunque risalire al
corretto valore di ϕ utilizzando la tab. A.1.2.
A.1.9
232
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
x
+
−
y
−
arctan(y/x) + π
+
arctan(y/x) + π
arctan(y/x) + 2π
∗
arctan(y/x)
Tab. A.1.2: Tabella per il calcolo dell’angolo delle coordinate polari date le coordinate cartesiane. A
seconda del segno dell’ascissa e dell’ordinata si calcolerà l’espressione corrispondente. ∗ Se non si aggiunge
2π il valore di ϕ che si ottiene è negativo e quindi non nell’intervallo [0, 2π], ma comunque corretto.
A.2 Elementi di calcolo infinitesimale dal punto di vista della fisica
Per poter affrontare con un minimo di rigore lo studio della fisica, della meccanica in particolare,
non si può far a meno di alcuni concetti matematici relativi a quella disciplina che va sotto il
nome di calcolo infinitesimale. Prova ne è il fatto che Isaac Newton, mentre gettava le basi della
meccanica, ha contribuito in modo sostanziale allo sviluppo di questa branca della matematica che
stava appena nascendo. Per gli studenti di oggi il termine calcolo infinitesimale risulta obsoleto, in
quanto la materia viene inglobata nei corsi di analisi matematica, ma preferisco usarlo lo stesso,
in quanto sottolinea la differenza fondamentale di punto di vista che un matematico e un fisico
hanno di fronte a questo problema. Il matematico ha la necessità, appunto, di analizzare in modo
completo tutte le possibili implicazioni ed estensioni di ogni concetto che riguardi la sua materia,
mentre per il fisico nozioni come la derivata o l’integrale sono prima di tutto strumenti di calcolo
che si possono utilizzare con vantaggio in tutti i casi in cui aiutano a risolvere i problemi concreti.
Per fare un paragone molto terra–terra, per un fisico un cacciavite è uno strumento che si può
utilizzare provandolo via via sulle viti che si incontrano e imparandone sperimentalmente i limiti,
mentre un matematico che vedesse il cacciavite dal punto di vista della sua disciplina tenderebbe
a cercare delle relazioni generali che legassero tutti i vari tipi di strumenti con tutti i tipi di viti
con cui si possono usare.
Dal momento che diversi studenti hanno manifestato un certo disagio riguardo alla matematica
del corso, soprattutto di fronte a concetti come le derivate parziali e gli integrali di linea, superficie
e volume, che non avevano ancora incontrato nei corsi di analisi, si è creduto opportuno fornire qui
un compendio di questi argomenti, trattati da un punto di vista pratico–informale, senza rigore
ma con lo scopo di evidenziarne il significato fisico e le possibilità di applicazione. In particolare
si vedrà che i “famigerati” integrali di linea, superficie e volume dal punto di vista del fisico si
riducono a operazioni molto semplici, almeno in linea di principio.
A.2.1 La derivata
Consideriamo una funzione y = f (x), riportata in un grafico cartesiano. Consideriamo il punto
A sulla curva della funzione in corrispondenza di un particolare valore di x, x = x0 ; sarà A ≡
(x0 , f (x0 )). Consideriamo poi il punto B sulla curva spostato in orizzontale di un tratto ∆x:
B ≡ (x0 + ∆x, f (x0 + ∆x)). Chiameremo ∆y la differenza fra i valori della funzione in B e A:
∆y = ∆f (x)x=x0 = f (x0 + ∆x) − f (x0 ). La retta che passa per i punti A e B ha equazione3
y=
∆y
(x − x0 ) + f (x0 )
∆x
(A.2.1)
Il rapporto ∆y/∆x corrisponde al coefficiente angolare della retta e si dice anche rapporto
3
Si ricorda che, dalla geometria analitica elementare, la retta che passa per i punti P1 ≡ (x1 , y1 ) e
equazione(y − y1 )/(y2 − y1 ) = (x − x1 )/(x2 − x1 ) da cui y = [(y2 − y1 )/(x2 − x1 )] (x − x1 ) + y1 .
233
P2 ≡ (x2 , y2 ) ha
A.2.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
y
3.2
3.0
B
f(x0 + ∆x)
2.8
2.6
∆y
f(x0)
2.4
1.5
tangente
A
∆x
x0
2.0
2.5
x0 + ∆x
3.0
x 3.5
Fig. A.2.1: Grafico di una funzione y = f (x), con la retta passante per i suoi punti A e B separati
sulle ascisse da un tratto ∆x. Al tendere a zero di ∆x la retta diventa la tangente alla curva in A.
incrementale. Se ora facciamo tendere a zero il tratto ∆x troveremo l’equazione di una retta che
tocca la curva in due punti coincidenti, ovvero, per definizione, la retta tangente alla curva in A
�
�
∆y
y = lim
(x − x0 ) + f (x0 )
∆x→0 ∆x
(A.2.2)
il termine in parentesi quadre della (A.2.2) si chiama derivata della funzione f(x) in x = x0 e
corrisponde al coefficiente angolare della retta tangente. Se il limite esiste in un intervallo di
valori di x, possiamo definire una nuova funzione f � (x) che ha per valore la derivata di f (x) nei
vari punti. La derivata si può anche convenientemente indicare per mezzo del rapporto dy/dx =
lim∆x→0 (∆y/∆x) dove dx è l’incremento infinitesimo della variabile x e dy il corrispondente
incremento, sempre infinitesimo, della variabile y = f (x). Quindi, in generale
f � (x) =
dy
f (x + ∆x) − f (x)
= lim
dx ∆x→0
∆x
(A.2.3)
Si può considerare la derivata come un operatore che opera sulla funzione f (x) e scriverlo come
d/dx per cui
d
f (x) = f � (x)
dx
(A.2.4)
Se consideriamo gli incrementi dx e dy nella (A.2.3) come normali entità algebriche possiamo
ricavare
dy = df (x) = f � (x) dx
A.2.1
234
(A.2.5)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Si può dimostrare rigorosamente la validità della (A.2.5), come pure, in generale, la validità dei risultati che si ottengono considerando gli incrementi infinitesimi come normali variabili e applicando
le usuali regole del calcolo algebrico. La quantità espressa come dy o df (x) si chiama differenziale
della funzione f (x) e rappresenta il suo incremento infinitesimo corrispondente a un incremento
infinitesimo dx della variabile x.
Infine, possiamo derivare ulteriormente la derivata di una funzione f (x) ottenendo la derivata
seconda f �� (x)
f �� (x) =
�
�
d2 y
d2
d d
=
f
(x)
=
f
(x)
dx2
dx2
dx dx
(A.2.6)
e analogamente le derivate successive, ossia, la terza, la quarta, l’ennesima, indicata con
f (n) (x) = (dn /dxn )f (x).
La principale applicazione pratica delle derivate viene dal fatto che nei punti in cui la derivata di
una funzione si annulla, f � (x) = 0, avremo un massimo o un minimo relativo della funzione, a meno
che non si annulli anche la derivata seconda e resti non nulla la terza, caso in cui avremo un flesso
orizzontale. Questa proprietà si sfrutta per risolvere problemi di massimizzazione e minimizzazione
di una funzione, ma possiamo considerare l’argomento ampiamente svolto nel primo corso di Analisi
Matematica.
Un’ulteriore applicazione della derivata l’abbiamo nell’approssimazione di una funzione nell’intorno di un punto. Consideriamo la (A.2.2), che rappresenta la tangente alla curva della funzione nel punto x0 ; questa retta è quella che, in un intorno di x0 , si discosta meno dalla funzione:
possiamo quindi considerarla la migliore approssimazione al primo ordine di f (x)4
f (x) � f (x0 ) + f � (x)|x=x0 (x − x0 )
(A.2.7)
In fisica succede abbastanza spesso che, mentre non si riesce ad avere una risoluzione generale di un
problema, questa sia possibile se, quando una variabile varia in un intervallo abbastanza limitato,
si approssimano le funzioni di essa al primo ordine. Questa procedura è detta linearizzazione del
problema; un esempio è quello delle piccole oscillazioni trattate in 5.8.2.
Possiamo cercare un’approssimazione migliore di una funzione f (x) nell’intorno di un punto x0
se invece di una retta utilizziamo un polinomio di ordine n. Il polinomio che approssima meglio la
funzione sarà quello per cui il valore in x0 corrisponderà a quello della funzione e che avrà tutte
le derivate successive, calcolate in x = x0 coincidenti con le derivate della funzione. Consideriamo
per semplicità una variabile z = x − x0 e se chiamiamo Pn (z) il generico polinomio di ordine n in
4
Preferiamo scrivere f � (x)|x=x0 piuttosto che f � (x0 ) per indicare che prima deriviamo la funzione e poi calcoliamo
il valore della derivata in un punto e non viceversa, operazione che non avrebbe senso, dato che se derivassimo il
valore della funzione in un punto, essendo questo un numero, ossia una costante, la derivata sarebbe sempre nulla.
Infatti, la derivata di una funzione in un punto si può calcolare solo se si conosce anche l’andamento di essa in un
intorno del punto. Nondimeno useremo anche la notazione f � (x0 ) o analoghe, che vanno comunque interpretate
correttamente secondo quanto detto sopra.
235
A.2.1
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
z avremo
Pn (z) = a0 + a1 z + a2 z 2 + . . . + an z n
d
Pn (z) = a1 + 2 a2 z + 3 a3 z 2 + . . . + n an z n−1
dz
d2
Pn (z) = 2 a2 + 3 · 2 a3 z + 4 · 3 z 2 + . . . + n(n − 1) z n−2
dz 2
d3
Pn (z) = 3 · 2 a3 + 4 · 3 · 2 z + 5 · 4 · 3 z 2 + n(n − 1)(n − 2) z n−3
dz 3
.... ....................................................
n
d
Pn (z) = n! an
dz n
(A.2.8)
Da cui in generale si ricava
di
Pn (z)|z=0 = i! ai
dz i
(A.2.9)
Vogliamo che le derivate del polinomio in z = 0, ossia in x = x0 coincidano con quelle della funzione
da approssimare. Questo comporta per i coefficienti
ai =
1 di
f (x)|x=x0
i! dxi
(A.2.10)
Avremo quindi per l’approssimazione di ordine n della funzione in x = x0
d
1 d2
f (x)|x=x0 (x − x0 ) +
f (x)|x=x0 (x − x0 )2 +
dx
2! dx2
1 d3
1 dn
3
+
f
(x)|
(x
−
x
)
+
.
.
.
+
f (x)|x=x0 (x − x0 )n
x=x
0
0
3! dx3
n! dx3
f (x) � f (x0 ) +
(A.2.11)
In fig. A.2.2 è rappresentato un esempio: si considera la funzione sin x e la si approssima fino al
terzo ordine in x = 0.75 rad. La qualità dell’approssimazione è valutabile dalla tabella A.2.1, dove
sono riportati i valori numerici.
x
sin x
P1 (x)
P2 (x)
P3 (x)
0.75
0.681639
0.681639
0.681639
0.681639
0.85
0.75128
0.754808
0.751399
0.751278
0.95
0.813416
0.827977
0.814344
0.813368
1.05
0.867423
0.901145
0.870472
0.867179
1.15
0.912764
0.974314
0.919783
0.911979
1.25
0.948985
1.04748
0.962278
0.947035
Tab. A.2.1: Valori numerici della funzione y = sin x e delle sue approssimazioni al primo, secondo
e terzo ordine nel punto x = 0.75 rad, corrispondenti ai grafici di fig. A..2.2.
A.2.1
236
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
1.05
1
1.00
2
sin x
3
0.95
0.90
0.85
0.80
0.75
0.70
0.8
0.9
1.0
1.1
1.2
x
Fig. A.2.2: Grafico della funzione y = sin x e delle sue approssimazioni polinomiali al primo, secondo
e terzo ordine, a partire dal punto x = 0.75 rad. I numeri indicano le curve corrispondenti ai vari ordini
di approssimazione. Gli scarti fra la funzione e l’approssimazione del terzo ordine non sono graficamente
quasi irrilevabili.
A.2.2 Funzioni di più variabili e derivate parziali
Consideriamo una funzione di due variabili z = f (x, y). Si definiscono derivate parziali della
funzione rispetto a ciascuna delle variabili x e y nel punto (x0 , y0 )
�
∂f (x, y) ��
f (x0 + ∆x, y0 ) − f (x0 , y0 )
= lim
�
∆x→0
∂x
∆x
(x ,y )
� 0 0
�
∂f (x, y) �
f (x0 , y0 + ∆y) − f (x0 , y0 )
= lim
∆y→0
∂y �
∆y
(A.2.12)
(x0 ,y0 )
In pratica, per calcolare la derivata parziale rispetto a x consideriamo f (x, y) come una funzione in
cui varia la sola x, mentre il valore di y rimane costante, mentre per la derivata parziale rispetto a
y si mantiene costante la x. Si noti che per distinguere la derivata parziale dalla normale derivata
si usa il simbolo ∂ invece di d. Anche in questo caso se le derivate parziali di una funzione f (x, y)
si possono calcolare in un insieme di punti, esse definiscono una nuove funzioni di x e y, ossia
le funzioni derivate parziali. Se ad esempio f (x, y) = x2 + xy + y 2 avremo le derivate parziali
∂f (x, y)/∂x = 2x + y, ∂f (x, y)/∂y = 2y + x.
Come per la derivata di una funzione f (x), anche le derivate parziali risultano molto utili nel
calcolo dei punti dove una funzione di più variabili ha un massimo o un minimo relativo, ma, come
mostrato in fig. 5.8.2, la situazione è complicata dall’esistenza di altre configurazioni, come i punti
di sella, per cui non ci inoltreremo nell’argomento. Vogliamo invece vedere, anche in questo caso,
come le derivate parziali giochino nell’approssimazione di una funzione di più variabili nell’intorno
di un punto. Nel caso di una funzione f (x) abbiamo considerato come sua approssimazione al primo
ordine nell’intorno di un punto x0 la retta tangente nel punto alla funzione stessa. Nel nostro caso
useremo come approssimazione il piano tangente alla superficie z = f (x, y) rappresentata dalla
funzione.
237
A.2.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
z
x2+y2
y2+16
8x+10y-41
100
x2+25
(4,5,41)
0
10
0
x
5
5
y
10
Fig. A.2.3: Esempio di approssimazione al primo ordine di una funzione in due variabili. La funzione
è z = f (x, y) = x2 + y 2 , rappresentata dalla superficie curva, e il punto di partenza per l’approssimazione
è (4, 5, 41). Sono tracciati i piani verticali passanti per il punto e paralleli agli assi x e y, di equazione
x = 4 e y = 5, rispettivamente. In rosso sono rappresentate le curve date dalle funzioni f (4, y) e f (x, 5) ,
intersezioni della superficie con i piani sunnominati. È rappresentato anche il piano tangente alla superficie
nel punto di coordinate (4, 5, 41), di equazione z = 8x + 10y − 41. L’approssimazione al primo ordine della
funzione nell’intorno del punto dato vale f (x, y) � f (4, 5) + (∂f /∂x)|(4.5) (x − 4) + (∂f /∂y)|(4.5) (y − 5) =
8x − 10y − 41.
Si può dimostrare che questo piano ha equazione5
z = f (x0 , y0 ) +
5
�
�
∂f (x, y) ��
∂f (x, y) ��
(x
−
x
)
+
(y − y0 )
0
∂x �(x0 ,y0 )
∂y �(x0 ,y0 )
(A.2.13)
L’equazione generica di un piano si può scrivere, salvo che per i piani verticali, come z = a x + b y + c. Se tagliamo
la superficie z = f (x, y) con il piano verticale y = y0 , la traccia del piano tangente alla superficie in y = y0
corrisponde alla retta tangente in x0 alla funzione f (x, y0 ), dove varia la sola x Tale retta tangente ha equazione
z = f (x0 , y0 ) + (∂f (x, y)/∂x)|(x0 ,y0 ) (x − x0 ). Analogamente se tagliamo la superficie con il piano x = x0 la retta
tangente alla funzione f (x0 , y) risulta z = f (x0 , y0 ) + (∂f (x, y)/∂y)|(x0 ,y0 ) (y − y0 ). Il piano tangente alla superficie
dovrà quindi passare per (x0 , y0 , z0 = f (x0 , y0 )) e per tutti i punti delle due rette tangenti, che possiamo individuare
tramite le loro distanze ∆x da x0 e ∆y da y0 . Deve valere quindi il sistema
z0 = a x0 + b y0 + c
a x0 + b (y0 + +∆y) + c =
Risolvendolo per a, b, c si ottiene la (A.2.13).
A.2.2
�
�
∂f (x,y)
∆x
∂x
(x0 ,y0 )
∂f (x,y)
z0 +
∆y
∂y
(x0 ,y0 )
a (x0 + ∆x) + b y0 + c = z0 +
238
�
�
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
possiamo quindi scrivere, in un intorno di (x0 , y0 ),
�
�
∂f (x, y) ��
∂f (x, y) ��
f (x, y) � f (x0 , y0 ) +
(x − x0 ) +
(y − y0 )
∂x �(x0 ,y0 )
∂y �(x0 ,y0 )
(A.2.14)
Questi ragionamenti si estendono direttamente a una funzione di n variabili f (x1 , x2 . . . xn ).
Avremo n derivate parziali nel punto (x01 , x02 . . . x0n )
�
∂f (x1 , x2 . . . xn ) ��
=
�
∂xi
(x01 ,x02 ...x0n )
lim
∆xi →0
f (x01 , . . . x0(i−1) , x0i + ∆xi , x0(i+1) . . . x0n ) − f (x01 , x02 . . . x0n )
∆xi
(A.2.15)
L’approssimazione al primo ordine della funzione nell’intorno di un punto P = (x01 , x02 . . . x0n )
risulta
�
�
∂f ��
∂f ��
f (x1 , x2 . . . xn ) � f (x01 , x02 . . . x0n ) +
(x1 − z01 ) +
(x2 − z02 )+
∂x1 �P
∂x2 �P
�
�
n
�
∂f ��
∂f ��
+... +
(xn − z0n ) = f (x01 , x02 . . . x0n ) +
(xi − x0i )
∂xn �P
∂xi �P
i=1
(A.2.16)
Analogamente a quanto fatto nel caso di una sola variabile, possiamo introdurre il differenziale
della funzione, espresso da
n
df (x1 , x2 , . . . xn ) =
� ∂f
∂f
∂f
∂f
dx1 +
dx2 + . . . +
dxn =
dxi
∂x1
∂x2
∂xn
∂xi
i=1
(A.2.17)
che rappresenta la variazione infinitesima della funzione quando a ciascuna variabile viene applicato
un incremento infinitesimo dxi . Questo concetto è usato nella propagazione degli errori, in 1.3.4 e
nello studio dell’equilibrio di un sistema in base alla sua energia potenziale, in 5.8.1.
Come per la derivata di una funzione di una sola variabile, si possono definire le derivate parziali
successive, che si calcolano iterando la derivazione parziale. Potendosi derivare rispetto a più
variabili, avremo un certo numero di derivate parziali successive diverse: ad esempio, per una
funzione di due variabili f (x, y) avremo quattro possibilità per le derivate parziali del secondo
ordine
�
�
�
�
∂ 2 f (x,y)
∂f (x,y)
∂ 2 f (x,y)
∂f (x,y)
∂
∂
=
=
2
2
∂x
∂x
∂x
∂y
∂y
∂y
(A.2.18)
�
�
�
�
2
2
∂ f (x,y)
∂f (x,y)
∂ f (x,y)
∂f (x,y)
∂
∂
=
=
∂x∂y
∂x
∂y
∂y∂x
∂y
∂x
Per il teorema di Clairaut 6 inoltre, se le derivate parziali seconde sono continue in ogni punto, le
6
Noto in letteratura anche come teorema di Schwarz.
239
A.2.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
derivate parziali miste coincidono, ossia
∂ 2 f (x, y)
∂ 2 f (x, y)
=
∂x∂y
∂y∂x
(se le derivate seconde sono continue in ogni punto)
(A.2.19)
Si può sviluppare una funzione di più variabili ad ordini superiori al primo intorno ad un punto
ma non utilizzeremo questo concetto nel corso e quindi non ci inoltreremo nell’argomento.
A.2.3 Integrali
Il concetto di integrale nasce dalla necessità di valutare gli effetti cumulativi di quantità che
variano in modo continuo nello spazio e/o nel tempo. Un tipico problema di questo genere è il
calcolo delle aree di superfici piane. Qualsiasi superficie delimitata da un numero finito di lati
rettilinei (ossia, qualsiasi poligono) può essere scomposta in triangoli di cui si possono determinare
le aree per mezzo della formula di Erone7
Fig. A.2.4: Un qualsiasi poligono piano con un numero finito di lati può essere suddiviso in triangoli.
Il problema del calcolo delle aree si complica quando una superficie è delimitata da tratti curvi.
Galileo Galilei in alcuni casi risolveva il problema in modo sperimentale: ritagliava da un cartoncino
(o dal materiale più simile disponibile ai suoi tempi) la sagoma della superficie da misurare e la
pesava con una bilancia. Ritagliava poi dallo stesso cartoncino un quadrato di area unitaria e pesava
anche quello; se il materiale è omogeneo i pesi stanno ovviamente fra loro come le aree e quindi
si ricava la misura voluta. Tuttavia proprio negli anni di Galileo e nel seguito del diciassettesimo
secolo lo studio di questi problemi fu affrontato anche da un punto di vista più prettamente
matematico e si arrivò a concepire l’utilità di suddividere le superfici in parti di dimensioni sempre
più piccole, in modo da poter valutare, come vedremo dopo in un esempio, il contributo di ciascuna
parte in modo semplice. Il risultato finale si ottiene poi sommando i vari contributi. Il concetto
nuovo in questo procedimento è quello di una quantità che diventa estremamente piccola, senza
però arrivare a raggiungere rigorosamente lo zero: si tratta di quelli che oggi chiamiamo infinitesimi
7
Se
� abbiamo un triangolo di lati a, b, c e indichiamo con p il semi–perimetro, p = (a + b + c)/2, l’area è data da
p(p − a)(p − b)(p − c).
A.2.3
240
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
C
0
π/1
π/10
B
H
A
Fig. A.2.5: Poligoni regolari di 10 lati (a sinistra) e di 20 lati (a destra) inscritti in una circonferenza. In colore
la parte della superficie del cerchio non contenuta nei poligoni: si vede come diminuisca al crescere del numero di
lati. È mostrato anche uno dei triangoli isosceli uguali in cui si può suddividere il poligono inscritto.
e a cui Cavalieri,8 nella sua teoria, aveva dato il nome di indivisibili. In questo procedimento si vede
ovviamente il concetto di limite, da cui nascerà poi con Leibniz9 e Newton il calcolo infinitesimale.
Per fare un esempio di questo tipo di ragionamento immaginiamo di voler calcolare l’area di
un cerchio: possiamo inscrivere nel cerchio poligoni regolari con un numero crescente di lati e
osserviamo che l’area di ciascun poligono risulterà inferiore a quella del cerchio, visto che, per
n lati, esistono n segmenti circolari esterni al poligono ma ancora compresi dalla circonferenza;
vediamo anche però che all’aumentare del numero dei lati l’area del poligono cresce, avvicinandosi
sempre di più a quella del cerchio. Potremmo quindi pensare l’area del cerchio coincidente a quella
del poligono inscritto con un numero infinito di lati. Non potendo concepire direttamente un tale
poligono, vediamo cosa accade se ne prendiamo uno con un numero finito ma molto grande n di
lati. Il poligono sarà composto da n triangoli isosceli aventi i lati obliqui pari al raggio r del cerchio
e l’angolo al vertice di ampiezza 2 π/n. In fig. A.2.5 è mostrato uno di tali triangoli, con base AB
e lati obliqui CA e CB. Al crescere di n vediamo che:
a. l’area di ogni triangolo si avvicina sempre più a quella del settore di cerchio corrispondente, che
comprende anche il segmento esterno.
b. La base del triangolo e il corrispondente arco di circonferenza si avvicinano sempre più fra loro,
tanto da poter approssimare l’una all’altra le loro lunghezze, ossia considerare quella della base
pari a 2 π r/n.
c. L’altezza del triangolo isoscele e il lato obliquo tendono pure a coincidere, cosı̀ da poter considerare la misura dell’altezza pari a r.
A questo punto possiamo calcolare l’area del triangolo come semiprodotto della base per l’altezza,
ottenendo π r2 /n; avendosi n triangoli l’area del cerchio risulta πr2 , che sappiamo essere proprio
il valore corretto.
Il concetto vero e proprio di integrale viene usualmente introdotto considerando di voler calcolare
l’area della figura piana che ha come limiti, in un sistema di coordinate cartesiane, la retta x = a,
la retta x = b (con a < b), la retta y = 0, ossia l’asse x, e la curva rappresentata da una
funzione y = f (x), dove f (x) ≥ 0 nell’intervallo a ≤ x ≤ b.10 Suddividiamo l’intervallo (a, b) in
n sottointervalli uguali di ampiezza ∆x = (b − a)/n. In questo modo la superficie che ci interessa
si può approssimare come la somma di n rettangoli aventi i lati verticali sulle rette x = xi , dove
xi = a + i ∆x, con 0 ≤ i ≤ n e i lati orizzontali sulla retta y = 0 e sulle rette y = f (xi ), con
8
9
10
Bonaventura Francesco Cavalieri (1598–1647), matematico italiano, apprezzato da Galileo, che ne favorı̀ la carriera
accademica.
Gottfried Wilhelm von Leibniz (1646–1716), matematico e filosofo tedesco. Sviluppò il calcolo infinitesimale indipendentemente da Isaac Newton e introdusse la notazione per derivate e integrali ancora in uso.
Quello che segue non è un’introduzione matematicamente rigorosa del concetto d’integrale, ma vuole dare un’idea
del rapporto fra i concetti di area, integrale e derivata.
241
A.2.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
∆x
0 1 …
n
f(x)
O
b x
a
Fig. A.2.6: L’area della figura compresa fra la curva y = f (x), l’asse delle ascisse e le rette x = a, x = b può
essere approssimata come somma delle aree di rettangoli dividendo l’intervallo (a, b) in n parti.
1 ≤ i ≤ n. Avremo quindi una valutazione approssimata dell’area In data da
In =
n
�
f (xi ) ∆x
(A.2.20)
i=1
Aumentando il numero di parti in cui si divide l’intervallo le differenze fra la somma delle aree dei
rettangoli e l’area che vogliamo calcolare si riducono; possiamo indicare con I il valore limite di
In che si ottiene quando n tende ad infinito e chiamiamo I integrale definito della funzione f (x)
nell’intervallo (a, b)
I = lim
n→∞
� n
�
i=1
�
f (xi ) ∆x ≡
�
b
f (x) dx
(A.2.21)
a
La sommatoria nella (A.2.21) non diverge perché al crescere del numero di addendi si riduce in
proporzione l’ampiezza ∆x delle parti. Nell’ultimo passaggio è scritta la forma con cui viene
rappresentato l’integrale: la lettera “sigma” della sommatoria prende una forma curva e continua e
∆x diventa un infinitesimo dx. L’integrale si calcola quindi suddividendo l’intervallo in “un numero
infinito di parti di ampiezza infinitesima” e sommando le aree degli infiniti rettangoli che risultano.
Va da sé che una simile ricetta non è applicabile alla lettera in pratica, ma in un certo numero
di casi è possibile trovare il valore dell’integrale in forma esatta. Per vedere questo facciamo un
passo avanti, considerando di calcolare l’integrale non su un intervallo fisso a, b ma su un intervallo
(a, x) dove l’estremo superiore è variabile. Dati f (x) e a, l’integrale calcolato in (a, x) risulta una
funzione di x che possiamo scrivere
I(x) =
�
x
f (x) dx
a
A.2.3
242
(A.2.22)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
dove ovviamente I(a) = 0. Possiamo chiederci quanto valga il differenziale della funzione I(x)
�
dI(x) = I(x + dx) − I(x) =
x+dx
a
f (x) dx −
�
x
f (x) dx
(A.2.23)
a
La differenza fra i due integrali è costituita dall’area del rettangolo infinitesimo delimitato dall’asse
x, dalla funzione e dalle rette x = x e x = x + dx. È facile vedere che quest’area vale11 f (x) dx.
Possiamo quindi scrivere
dI(x)
dx = f (x) dx
dx
dI(x) =
dI(x)
= f (x)
dx
⇒
(A.2.24)
La (A.2.24) fa vedere che in generale la funzione I(x) derivata rispetto a x dà la cosiddetta funzione
integranda f (x). Possiamo quindi conoscere il valore dell’integrale se, data f (x), riusciamo a trovare
la cosiddetta funzione primitiva F (x), ossia una funzione tale che dF (x)/dx = f (x). Se F (x) è
una primitiva, lo sono anche tutte le funzioni F (x) + C, dove C è una costante qualunque. La
funzione I(x) è quella primitiva per cui F (a) = 0. A questo punto possiamo definire l’integrale
(A.2.21) nella forma
�
a
b
f (x) dx = F (b) − F (a)
dF (x)
= f (x)
dx
dove
(A.2.25)
dove F (x) è una qualunque primitiva: infatti, poiché le primitive differiscono fra loro per una
costante, la differenza F (b) − F (a) non dipende dalla particolare primitiva scelta.
La (A.2.25) è la formula fondamentale del calcolo integrale e riconduce il problema del calcolo
delle aree a quello della determinazione di una primitiva della funzione integranda. Rispetto alla
normale definizione geometrica di area occorre tener presente che
- Nei tratti dove f (x) < 0 il contributo all’area viene considerato negativo. Ad esempio (vedi
fig. A.1.2)
�
0
π
sin x dx = − cos(π) + cos(0) = 2 ma
�
2π
π
sin x dx = − cos(2π) + cos(π) = −2 (A.2.26)
- Se si invertono gli estremi dell’intervallo di integrazione, l’integrale cambia segno; infatti dalla
(A.2.25)
�
b
a
f (x) dx = F (a) − F (b) = −
�
b
f (x) dx
(A.2.27)
a
- Una teoria più approfondita mostra che in alcuni casi si possono calcolare integrali anche se la
funzione f (x) non è continua e diverge, oppure su intervalli di integrazione estesi fino all’infinito.
11
Per maggior precisione, con la nostra definizione l’area sarebbe data da f (x + dx) dx. Tuttavia possiamo sfruttare
il concetto di differenziale espresso dalla (A.2.5) e abbiamo f (x + dx) dx = f (x) dx + f � (x) dx2 . L’ultimo termine è
infinitesimo del secondo ordine e quindi non si considera.
243
A.2.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Il calcolo dell’integrale può essere effettuato determinando la funzione primitiva con uno dei
metodi spiegati nei corsi di analisi (integrazione per sostituzione, per parti, ecc.); in altri casi non
è possibile determinare una primitiva della funzione integranda come combinazione di un numero
finito di operazioni algebriche e funzioni trascendenti elementari (trigonometriche, logaritmiche,
esponenziali, ecc.). Allora l’integrale definisce una nuova funzione. Questo avviene ad esempio per
la funzione degli errori 12 erf (x) definita come
2
erf (x) = √
π
�
x
2
e−t dt
(A.2.28)
0
Si può esprimere la funzione come serie infinita di potenze, considerando che
x2
x3
x4
+
+
+ ...
2!
3!
4!
2
t4
t6
t8
e−t = 1 − t2 + − + + . . .
2! 3! 4!
�
�
∞
i
2
x3
x5
x7
x9
2 � (−1)
erf (x) = √
x−
+
−
+
+ ... = √
x2i+1
3
5 · 2! 7 · 3! 9 · 4!
π
π i=0 (2i + 1) i!
ex = 1 + x +
(A.2.29)
dove nell’ultimo passaggio si sono sommate le primitive dei vari termini della serie della funzione
integranda, calcolandole poi fra 0 e x. In altri casi l’integrale viene calcolato in forma approssimata
utilizzando direttamente la (A.2.20) su un numero sufficientemente alto di punti, o con metodi che
ne sono un raffinamento, come quelli di Simpson e di Gauss.
A.2.4 Integrali di superficie, di volume e di linea
In fisica capita spesso di dover calcolare quantità globali a cui ogni parte del sistema fisico dà
un contributo, come ad esempio le coordinate del centro di massa di un sistema o il momento
d’inerzia di un corpo rigido. Per sistemi distribuiti nello spazio con continuità questo comporta
di dover calcolare la somma di infiniti contributi infinitesimi. Per fare un esempio, consideriamo
un pavimento, che identificheremo con il piano XY di un sistema di riferimento cartesiano, su
cui sia stata gettata della sabbia che si è ammonticchiata in modo irregolare, come in fig. A.2.7.
Supponiamo di voler calcolare il volume totale della sabbia che si trova sul pavimento. In ogni
punto di esso la sabbia avrà un’altezza z, diversa da punto a punto, che potremmo considerare
nota come z = h(x, y). Il volume cercato, analogamente al caso del normale integrale, potremo
indicarlo come
�
V =
h(x, y) dx dy
(A.2.30)
S
dove S indica la parte del piano–pavimento su cui si trova la sabbia e dx dy è la superficie di
un rettangolo infinitesimo di pavimento che si trova alle coordinate (x, y). Il modo più comune
per risolvere un integrale di questo tipo consiste nel considerare “strisce” di rettangoli orientate
secondo uno dei due assi e spezzare il calcolo in due integrazioni successive. Il caso più banale si
ha quando la zona di integrazione è semplicemente un rettangolo: ad esempio, come in fig. A.2.7,
quello compreso fra i punti di coordinate13 (0, 0), (10, 0), (10, 10), (0, 10). Potremo decidere di
12
13
Il nome funzione degli errori deriva dal fatto che è l’integrale di una funzione gaussiana, che rappresenta la densità
di probabilità più comune per le fluttuazioni di misure in fisica.
Diamo le coordinate come numeri, che si intenderanno come valori delle lunghezze espressi nella loro unità di misura.
A.2.4
244
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
10
2.0
5
1.5
y
1.0
z
0.5
10
0
0.0
5
x
0
Fig. A.2.7: Su un pavimento, corrispondente al piano XY , è stata versata della sabbia in modo
irregolare, formando delle “dune”. Si può calcolare con un integrale il volume della sabbia se si conosce
l’altezza della sabbia in ogni punto del pavimento, ossia z = f (x, y).
suddividerlo in strisce di spessore infinitesimo dx parallele all’asse Y e avremo
V =
�
��
10
x=0
10
h(x, y) dy
y=0
�
dx =
�
10
I(x) dx
(A.2.31)
x=0
dove l’integrale in parentesi quadre nel primo passaggio riguarda una funzione in cui varia la sola
y mentre la x resta costante, ossia, appunto, un integrale su una striscia parallela all’asse Y . Esso
produce un risultato che è funzione della sola x e che potrà essere integrato ulteriormente. Le
cose si complicano lievemente se la zona del piano xy in cui vogliamo calcolare l’integrale non
è rettangolare. Supponiamo, per esempio, che essa corrisponda a un cerchio di raggio unitario
centrato nell’origine. In questo caso la procedura diventerebbe
V =
�
1
x=−1
��
√
1−x2
√
y=− 1−x2
h(x, y) dy
�
dx =
�
1
I(x) dx
(A.2.32)
x=−1
dove gli estremi di integrazione in parentesi quadre sono quelli di una striscia del cerchio unitario
parallela all’asse Y i cui punti hanno ascisse comprese fra x e x + dx. In casi più complicati, se ad
esempio la superficie d’integrazione non è convessa o la prima integrazione dovrà essere effettuata
su diversi intervalli disgiunti, come mostrato in fig. A.2.8.
Il concetto di integrale di superficie si può estendere a quello di integrale di volume. Supponiamo,
per esempio, di conoscere la densità di un gas, variabile da punto a punto all’interno di un recipiente,
245
A.2.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
y
y
a)
x
b)
x
Fig. A.2.8: Sue superfici di integrazione nel piano xy suddivise in strisce parallele all’asse y. In a)
abbiamo una superficie connessa (cerchio di raggio
√ unitario) e la striscia evidenziata, corrispondente a un
valore x dell’ascissa, ha per limiti in y: y = ± 1 − x2 . La superficie d’integrazione in b) non è convessa
e la striscia evidenziata si spezza in due intervalli disgiunti.
ρ(x, y, z). Potremo allora calcolare la massa totale del gas nel recipiente come
M=
�
(A.2.33)
ρ(x, y, z) dx dy dz
V
dove V rappresenta il volume del recipiente. Anche gli integrali di volume possono essere risolti
per passi successivi come quelli di superficie.
È anche da notare che gli elementi infinitesimi di superficie e di volume non dovranno essere
espressi necessariamente in coordinate cartesiane, ma si potranno usare, se opportuno, anche coordinate polari, cilindriche o sferiche. Ad esempio,un elemento di superficie infinitesimo nel piano
XY si può esprimere in coordinate polari come
dS = r dr dϕ
(A.2.34)
Questo tipo di scomposizione della superficie si presta a calcolare con facilità integrali dove la
funzione ha simmetria radiale. Ad esempio, la (A.2.34) si può usare per calcolare l’area del cerchio
di raggio R
Ac =
�
cerchio
dS =
�
cerchio
r dr dϕ =
�
R
r=0
r
��
2π
ϕ=0
�
dϕ dr = π R2
(A.2.35)
Analogamente, un elemento di volume infinitesimo può essere espresso come
dV = r dr dz dϕ
in coordinate cilindriche
dV = r2 sin θ dr dθ dϕ in coordinate sferiche
(A.2.36)
In alcuni casi, soprattutto quando l’integrale da calcolare presenta delle simmetrie, un integrale di
superficie o di volume può essere impostato direttamente come un normale integrale di una funzione
A.2.4
246
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
di una variabile. Questo avviene quando si riesce a dividere la zona di integrazione in parti di cui
si sa calcolare il contributo all’integrale, aventi una sola componente infinitesima corrispondente
a una variabile che individua ciascuna parte. Ad esempio, i momenti d’inerzia di un cilindro (in
4.8.4) e di una sfera (in 4.8.5) sono calcolati scomponendo i solidi in parti di forma cilindrica
dove una variabile x individua il particolare cilindro e dx ne rappresenta l’altezza infinitesima. A
titolo di esempio vogliamo illustrare il procedimento considerando il calcolo del volume di una sfera
omogenea di raggio R e del suo momento d’inerzia rispetto a un asse passante per il centro, con
una scomposizione diversa da quella usata in 4.8.5.
Z
Y
O
xP
dx
X
Fig. A.2.9: Allo scopo di calcolarne il volume e il momento d’inerzia rispetto a un asse passante per
il centro, una sfera omogenea di raggio R viene scomposta in “bucce” cilindriche concentriche di raggio
x e spessore infinitesimo dx.
Utilizziamo un sistema di riferimento cartesiano con l’origine nel centro della sfera e scomponiamo quest’ultima in una serie di “bucce” cilindriche aventi per asse l’asse Z e spessore infinitesimo.
Possiamo usare l’ascissa x del punto P, intersezione della “buccia” con l’asse X, per individuare
il particolare elemento, mentre
dx corrisponde
allo spessore. Ciascun elemento
√
√
√ si estende in direzione Z nell’intervallo [− R2 − x2 , R2 − x2 ] e quindi ha altezza pari a 2 R2 − x2 . Le “bucce”
corrispondenti a valori piccoli di x saranno strette e alte, diventando via via più larghe e basse al
crescere di x. Possiamo scrivere facilmente l’espressione del volume infinitesimo di ciascuna buccia,
pensando di tagliarla parallelamente all’asse Z e di stenderla√su un piano; in questo modo essa
2
2
diventa un parallelepipedo con gli spigoli di dimensione 2πx,
√ 2 R − x e dx, rispettivamente, per
2
2
cui il volume infinitesimo dell’elemento risulta dV = 4πx R − x dx. Si ottiene il volume della
sfera sommando i contributi di ciascuna buccia, ossia
V =
�
R
4πx
x=0
�
R2 − x2 dx
(A.2.37)
L’integrale si calcola facilmente introducendo la variabile z 2 = R2 − x2 (corrisponde all’altezza
rispetto al piano XY dell’estremità superiore della buccia) per la quale si ottiene differenziando
z dz = −x dx. Si ha
V =
�
0
z=R
−4π
�
�
R2 − x2 z dz =
R
z=0
247
4π z 2 dz =
4
π R3
3
(A.2.38)
A.2.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Si noti come nel primo passaggio il cambio di variabile da x a z fa cambiare l’intervallo d’integrazione, in quanto a x = 0 corrisponde z = R e viceversa.
La stessa scomposizione ci consente di calcolare il momento d’inerzia rispetto all’asse Z; consideriamo la densità della sfera ρ = m/V = (3 m)/(4π R3 ). Il contributo di ciascuna “buccia” al√momento d’inerzia, essendo x la distanza di ogni punto di essa dall’asse Z, vale dI =
4πρ x3 R2 − x2 dx. L’integrale si calcola con lo stesso metodo del precedente
I=
�
R
4πρ x3
x=0
�
�
�
R2 − x2 dx =
0
z=R
−4πρ x2
�
R2 − x2 z dz =
8
2
= 4πρ
(R − z ) z dz =
πρ R5 = m R2
15
5
z=0
R
2
2
2
(A.2.39)
Si chiama, infine, integrale di linea quello in cui la zona di integrazione è costituita da una
traiettoria Γ nello spazio. La funzione integranda, dipendente dalla posizione, può essere scalare o
vettoriale e l’integrale può assumere diverse forme
I=
�
f (x, y, z) dP
Γ
I=
I=
�
�Γ
Γ
f (x, y, z) · dP
(A.2.40)
f (x, y, z) × dP
dando come risultato uno scalare o un vettore. La seconda forma della (A.2.40), in cui una funzione
vettoriale è moltiplicata scalarmente per lo spostamento infinitesimo, si ha nel calcolo del lavoro di
una forza, mentre la terza, con il prodotto vettoriale, compare, ad esempio, nel calcolo del campo
di induzione magnetica prodotto da una corrente che circola in un circuito. Si può ricondurre
l’integrale alla forma (A.2.21) se si conosce in forma parametrica la curva lungo cui si integra,
come la traiettoria nella (2.2.2). Il secondo integrale della (A.2.40) diventa, ad esempio,
I=
=
=
�
fx (x, y, z) dx
Γ
� p2 � �
fx
p
� 1p2
+ fy (x, y, z) dy + fz (x, y, z) dz =
� dx
�
� dy
�
� dz �
x(p), y(p), z(p)
dp + fy x(p), y(p), z(p)
dp + fz x(p), y(p), z(p)
dp =
dp
dp
dp
g(p) dp
p1
(A.2.41)
A.3 Energia potenziale all’interno di una distribuzione sferica di massa
In 6.7 abbiamo determinato l’energia potenziale di una distribuzione di massa omogenea su
una superficie sferica, determinando le (6.7.4), valide rispettivamente all’esterno e all’interno della
superficie. Ne abbiamo dedotto, nel caso di una distribuzione di massa tridimensionale a simmetria
sferica con raggio R, che la forza gravitazionale su un corpo a distanza r0 < R dipende solo dalla
massa che si trova nella sfera di centro r0 e corrisponde a quella che si avrebbe se detta massa
A.3
248
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
fosse concentrata nel centro della distribuzione sferica. Abbiamo ricavato la forza nel caso di una
distribuzione omogenea con la (6.7.5). Qui ci proponiamo invece di ricavare l’energia potenziale
di una distribuzione di massa omogenea a forma di sfera, di raggio R, in un punto che si trovi a
distanza r0 < R dal centro della sfera.
Nel fare questo calcolo è abbastanza facile commettere l’errore di pensare che se la massa che si
trova a distanza dal centro maggiore di r0 non contribuisce alla forza, essa si possa non considerare
nel calcolo dell’energia potenziale. Se cosı̀ facessimo dovremmo scrivere la prima delle (6.7.4)
considerando solo la massa Mi interna alla sfera di raggio r0
Vi = −
γ Mi
γ M r03
γM
=−
= − 3 r02
r0
r0 R3
R
(A.3.1)
dove si è sfruttato il fatto che Mi : M = r03 : R3 . Se considerassimo Vi come energia potenziale gravitazionale all’interno della distribuzione e calcolassimo la forza mediante il gradiente, risulterebbe
una forza repulsiva! Per ottenere l’espressione corretta dell’energia potenziale occorre considerare
anche il contributo della corona sferica con r0 < r ≤ R. Possiamo suddividerla in tante “bucce”
di raggio r e spessore infinitesimo dr, che contribuiranno ciascuna in accordo alla seconda delle
(6.7.4). Se indichiamo con ρ la densità della distribuzione, ρ = 3 M/(4 π R3 ) abbiamo
dVe = −
γ dM
γ 4 π r2 ρ dr
3 γ M r dr
=−
=−
r
r
R3
(A.3.2)
Otteniamo il contributo all’energia potenziale della parte di sfera con r > r0 integrando la (A.3.2)
3γ M
Ve = −
R3
�
R
r0
r dr = −
3γ M
3γ M 2
+
r
2R
2 R3 0
(A.3.3)
Abbiamo infine per l’energia potenziale all’interno della distribuzione
V = Vi + Ve =
1 γM 2 3 γM
r −
2 R3 0 2 R
(A.3.4)
Il secondo termine della (A.3.4) è una costante e quindi non contribuisce a determinare le forze;
esso comunque fa sı̀ che l’espressione (A.3.4) si raccordi con l’energia potenziale all’esterno della
sfera, data da −γ M/r0 , per r0 ≥ R. Se calcoliamo −grad V ritroviamo l’espressione della forza
attrattiva dato in (6.7.5).
L’andamento dell’energia potenziale in funzione della distanza dal centro della distribuzione è
rappresentato in fig. A.3.1.
A.4 Problema dei due corpi con interazione gravitazionale
Vogliamo qui completare l’informazione su alcuni aspetti del problema trattato in 6.8, in particolare la determinazione dei diversi tipi di orbita. Come primo passo studiamo le altre due curve
che costituiranno, oltre all’ellisse, le possibili orbite del nostro punto materiale.
249
A.4
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
V !J"
5.0 ! 106
1.0 ! 107
1.5 ! 107
2.0 ! 107
r !m"
"2 ! 107
"4 ! 107
"6 ! 107
"8 ! 107
Fig. A.3.1: L’energia potenziale all’interno e all’esterno di una distribuzione di massa omogenea a
simmetria sferica, avente massa e raggio corrispondenti a quelli della Terra. La linea rossa corrisponde
al raggio della distribuzione.
A.4.1 L’iperbole
L’iperbole è definita come il luogo dei punti di un piano per cui la differenza delle distanze da
due punti dati, detti fuochi, ha un valore dato costante. Analogamente a quanto fatto in 6.3.1
per l’ellisse, introduciamo i parametri 2d = F1 F2 e 2a = |PF1 − PF2 |. Possiamo vedere che per
l’iperbole deve essere a < d, poiché nel triangolo PF1 F2 la differenza delle lunghezze dei due lati è
sempre minore della lunghezza del terzo. Anche in questo caso studiamo la curva in un sistema di
riferimento avente l’asse X passante per i fuochi e l’origine nel punto equidistante fra essi. Non è
difficile vedere che nel caso limite a = 0 la curva coincide con l’asse Y del nostro sistema, mentre se
a = d gli unici punti che rispettano la condizione del luogo geometrico sono i fuochi stessi. Anche
l’iperbole, nel nostro sistema di riferimento, risulta simmetrica rispetto a entrambi gli assi.
L’equazione dell’iperbole in coordinate cartesiane si ricava allo stesso modo di quella dell’ellisse
�
�
y 2 + (d + x)2 − y 2 + (d − x)2 = 2a
⇒
y 2 + d2 + x2 + 2 d x = 4 a2 + y 2 + d2 − 2 d x + 4a
�
⇒ d x − a2 = a y 2 + (d − x)2 ⇒
⇒
�
y 2 + (d − x)2
⇒ d x + a − 2a dx = a y + a d + a x − 2a dx
2
⇒
2
4
2
2
2
2
2
2
2
(d − a ) x − a y = a (d − a )
2
2
2
2
2
2
2
2
2
⇒
(A.4.1)
⇒
introducendo il nuovo parametro b2 = d2 − a2 e dividendo entrambi i membri per a2 b2 si ottiene
la forma canonica
x2
y2
−
=1
a2
b2
(A.4.2)
La (A.4.2) si può esplicitare in funzione di y come
y=±
A.4.1
b� 2
x − a2
a
250
(A.4.3)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
6
R
4
4
P
2
-4
-2
F1
2
F1
2
-10
4
-8
-6
-4
H
-2
O A 2
F
-2
-2
-4
-4
-6
Fig. A.4.1: Iperbole e parabola.
Dove il segno ± significa che per qualsiasi valore di x per cui esistono punti della curva, ne esistono
due con ordinate opposte. Si vede anche dalla (A.4.3) che la curva non è definita per −a < x < a
e che ai punti x = ±a corrispondono le intersezioni con l’asse X. Questo implica che la curva
è costituita da due tratti disgiunti. Inoltre se consideriamo i casi in cui |x| → ∞, nella radice
quadrata della (A.4.3) possiamo trascurare il termine a2 e abbiamo
b
y=± x
a
(A.4.4)
La (A.4.4) rappresenta due rette passanti per l’origine e simmetriche rispetto all’asse X; esse
costituiscono gli asintoti della curva, ossia le rette a cui la curva si avvicina per x → ±∞.
Calcoliamo l’equazione della curva in coordinate polari, centrate nel fuoco F1 , esattamente come
abbiamo fatto per l’ellisse, utilizzando il teorema di Carnot per ricavare PF2
�
r2 + 4 d2 − 4 d r cos ϕ − r = 2a
⇒ d2 − a2 = r (a + d cos ϕ)
⇒
⇒
r=
r2 + 4 d2 − 4 d r cos ϕ = 4 a2 + r2 + 4 a r
2
1
2
d −a
a
+ ad cos ϕ
=
⇒
p
1 + � cos ϕ
(A.4.5)
dove abbiamo di nuovo introdotto il parametro p e l’eccentricità �. Si noti che per l’iperbole risulta
� > 1; questo implica, dovendo essere r ≥ 0, che la curva è definita solo per un intervallo
di angoli
�
in cui cos ϕ ≥ −a/d, ai valori di ϕ per cui cos ϕ = −a/d corrisponde sin ϕ = ± 1 − (a2 /d2 ) per
cui tan ϕ = ±b/a: gli angoli limite corrispondono alle direzioni degli asintoti.
A.4.2 La parabola
La parabola è definita come il luogo geometrico dei punti di un piano che hanno ugual distanza
da un punto dato, detto fuoco, e una retta R non passante per il punto. È d’uso chiamare 2 d la
251
A.4.2
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
distanza fra il fuoco F e la retta, e di studiare la curva in un sistema cartesiano avente l’asse X
passante per F e perpendicolare alla retta, con l’origine nel punto equidistante fra di essi, per cui
appartenente alla parabola. Possiamo trovare l’equazione della parabola in coordinate cartesiane
considerando che, detto H la proiezione di un punto generico della parabola P sull’asse X, abbiamo
OH = −x, dato che x < 0 Detto A il punto all’intersezione fra l’asse X e la retta R l’eguaglianza
delle distanze implica che deve essere AH = PF, dove la seconda lunghezza si calcola applicando
il teorema di Pitagora al triangolo PFH. Si ha
�
(d + x)2 + y 2 = d − x
⇒
d2 + x2 + 2 d x + y 2 = d2 + x2 − 2 d x
⇒
y 2 = −4 d x (A.4.6)
La parabola è definita, con le nostre convenzioni, solo per x ≤ 0. Risulta abbastanza facile trovare
l’equazione della parabola in coordinate polari centrate in F, osservando che la distanza r = PF
cercata corrisponde anche alla distanza fra P e la retta R
r = 2 d − r cos ϕ
r=
⇒
2d
1 + cos ϕ
(A.4.7)
La parabola ha equazione analoga a quella dell’ellisse e dell’iperbole, dove l’eccentricità vale 1. La
curva è definita per tutti i valori di ϕ e per ϕ → π r → ∞.
A.4.3 La traiettoria sotto l’effetto della forza gravitazionale
Studiamo il moto in coordinate polari e le nostre equazioni di moto sono le (6.8.6); l’andamento
di r è dato dall’equazione (6.8.7). Come prima cosa vogliamo calcolare dalla (6.8.7) il valore minimo
di r1 di r raggiunto durante il moto; anzi, per motivi che vedremo dopo, introduciamo subito la
nuova variabile w = 1/r e cerchiamo il valore w1 corrispondente a r1 , in cui 1/r risulta massimo.
gli estremi di r e w si hanno quando ṙ = 0, per cui avremo
1 l2
k
− − E1 = 0
2 µ r2
r
l2 2
w − k w − E1 = 0
2µ
⇒
(A.4.8)
Scriviamo il discriminante ∆ dell’equazione di secondo grado (A.4.8) e le soluzioni
2 l2 E1
µ
�
�
�
√
k± ∆
µk
2 l2 E1
w=
= 2
1± 1+
l2
l
µ k2
µ
∆ = k2 +
(A.4.9)
Vediamo che la condizione ∆ ≥ 0 per l’esistenza di soluzioni reali corrisponde a E1 ≥ −µ k2 /(2 l2 ).
∆ = 0 corrisponde al valore minimo E1m determinato in 6.8 per cui si ha un moto circolare a
velocità costante. Se E1m ≤ E1 < 0 l’equazione ha due soluzioni positive e quella maggiore,
corrispondente al minimo di r, vale
µk
w1 = 2
l
A.4.3
�
1+
�
2 l2 E1
1+
µ k2
252
�
(A.4.10)
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Se E1 > 0 una delle radici risulta negativa e quindi fisicamente non accettabile. La radice positiva
è ancora data dalla (A.4.10), che quindi rappresenta in generale la situazione di minima distanza
nel moto.
Per determinare la traiettoria del moto deriviamo la (6.8.7) rispetto al tempo14
µ r̈ −
l2
k
+ 2 =0
µ r3
r
(A.4.11)
Possiamo inoltre scrivere
dr
dr l
l d
ṙ =
ϕ̇ =
=−
2
dϕ
dϕ µ r
µ dϕ
� �
1
r
(A.4.12)
Dove abbiamo sfruttato la seconda delle (6.8.6). Deriviamo ancora rispetto al tempo
�
� ��
� �
d
l d 1
l2 d2
1
r̈ =
−
ϕ̇ = − 2 2
dϕ
µ dϕ r
µ r dϕ2 r
(A.4.13)
Introducendo la (A.4.13) nella (A.4.11) e operando la sostituzione (1/r) = w abbiamo
−
l2 2 d2 w l2 3
w
− w + k w2 = 0
µ
dϕ2
µ
d2 w
µk
+w = 2
dϕ2
l
⇒
(A.4.14)
L’equazione rappresenta un andamento armonico. Risolvendola con il metodo spiegato in 3.8.5
abbiamo la soluzione
w(ϕ) =
µk
+ C cos(ϕ + ϕ0 )
l2
(A.4.15)
Dove C e ϕ0 sono costanti da determinare mediante le condizioni iniziali. Scegliamo l’orientamento
del nostro sistema in modo tale che la distanza minima r1 risulti per ϕ = 0. Avremo quindi
w(0) = w1 . Inoltre alla distanza minima ṙ = (dr/dϕ) ϕ̇ = 0: dovendo essere in questa situazione
ϕ̇ �= 0, come si ricava anche dalla seconda delle (6.8.6), avremo (dw/dϕ)(0) = 0. Quindi
�
�
µ2k 1 + 1 +
l
2 l2 E1
µ k2
0 = −C sin(ϕ0 )
�
=
µk
l2
+ C cos(ϕ0 )
⇒
ϕ0 = 0
C =
µk
l2
�
1+
2 l2 E1
µ k2
(A.4.16)
Risulta
1
µk
= 2
r
l
14
�
1+
�
�
2 l2 E1
1+
cos ϕ
µ k2
r=
l2
µk
1+
�
1+
2 l2 E1
µ k2
cos ϕ
(A.4.17)
In generale, derivare un’equazione differenziale ne produce una di ordine superiore e quindi allontana più che
avvicinare alla soluzione. Tuttavia in alcuni casi, come questo, operare sull’equazione derivata risulta più semplice.
253
A.4.3
❢
C Andrea Perego 2012-2015 – versione 4 gennaio 2015 h15:32
Vediamo quindi che
- Se E1 = E1m � = 0 e la traiettoria è circolare
- Se E1m < E1 < 0 � < 1 e la traiettoria è ellittica
- Se E1 = 0 � = 1 e la traiettoria è parabolica
- Se E1 > 0 � > 1 e la traiettoria è iperbolica.
Le traiettorie circolari e ellittiche sono orbite chiuse, in cui il moto è periodico e gli oggetti si
mantengono a distanza finita; le traiettorie paraboliche e iperboliche sono aperte e corrispondono
a moti in cui gli oggetti (dopo un eventuale avvicinamento a seconda delle condizioni iniziali)
tendono a distanziarsi sempre più.
A.4.3
254