. 1. Cenni costruttivi e")
8. MACCHINA A INDUZIONE (ASINCRONA).
1. Cenni costruttivi e generalità.
Le macchine asincrone trifasi sono macchine rotanti a corrente alternata, costituite da due
armature cilindriche coassiali, separate tra loro da un piccolo traferro: si tratta dunque della
situazione strutturale considerata per lo studio del campo rotante.
In linea di principio, come tutte le macchine rotanti, anche la macchina asincrona ha un
funzionamento reversibile: quando assorbe potenza elettrica ai morsetti e, tramite una
conversione di energia, la eroga in forma meccanica all'albero, la macchina funziona come
motore. Se il flusso di potenza si inverte, essa funziona come generatore.
Nel seguito si studierà prevalentemente il funzionamento della macchina asincrona come
motore.
Dal punto di vista della struttura magnetica si può osservare quanto segue: allo scopo di
limitare le perdite nel materiale ferromagnetico (causate dalle correnti parassite), le armature
magnetiche sono realizzate in lamierini di acciaio a basso tenore di carbonio e di solito con una
modesta percentuale di silicio. Inoltre, lo spessore è pari a (0.5÷0.65) mm ed i piani di
laminazione risultano perpendicolari all'asse della macchina.
Usualmente l'armatura esterna costituisce la parte fissa della macchina (statore) mentre quella
interna, calettata su un albero (per la trasmissione della potenza meccanica), è rotante (rotore).
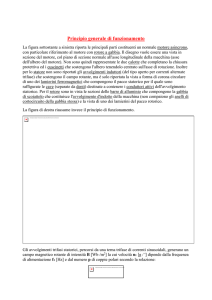
Ciascuna struttura ha cave tutte uguali e uniformemente distribuite lungo la periferia, nella zona
prospiciente il traferro (v. fig. 01).
Fig. 01 Rappresentazione di un lamierino statorico e di uno rotorico di una macchina asincrona.
Questa macchina elettrica è detta "a induzione", in quanto entrambi i gruppi di avvolgimenti
presenti (quello avvolto nelle cave di statore e quello disposto sul rotore) sono sede di f.e.m. .
L'avvolgimento disposto nelle cave di statore è dotato di morsetti: per la alimentazione della
macchina, tali morsetti vengono connessi ad una rete di alimentazione in c.a. .
Questa macchina è anche detta "asincrona", in quanto la sua velocità di rotazione meccanica
non dipende univocamente dalla frequenza di alimentazione (come invece avviene per il campo
magnetico rotante), ma anche dalle condizioni di carico.
L'avvolgimento connesso alla rete di alimentazione, detto primario, è solitamente di tipo
polifase. L'avvolgimento disposto sul rotore, detto secondario, è sempre polifase, ha lo stesso
numero di poli di quello dello statore e può essere fondamentalmente di due tipi:
permanentemente chiuso in corto circuito. Tale tipo di avvolgimento, costituito da
conduttori attivi con forma di barre (connesse fra loro sulle parti frontali da due anelli
di corto circuito) è detto avvolgimento a gabbia: questa può essere di tipo semplice
115
(come schematizzato in fig. 02), multipla (con due o più ordini di barre sovrapposte
radialmente), o con barre di forma particolare (profonda, trapezoidale, rettangolare);
di tipo aperto, detto anche "a rotore avvolto", dotato di avvolgimento trifase: questo
può essere collegato a triangolo o a stella. Nel seguito si farà riferimento al
collegamento a stella (cui ci si può ricondurre in termini di equivalenza anche nel caso
di collegamento a triangolo): in questa ipotesi, ognuno dei tre capi liberi è connesso ad
un anello conduttore (collettore ad anelli). Durante la rotazione del rotore, su ciascuno
dei tre anelli (isolati fra loro, coassiali e solidali con l'albero) possono strisciare
altrettante spazzole (fisse rispetto allo statore): queste spazzole costituiscono tre
morsetti per il collegamento degli avvolgimenti rotorici con eventuali circuiti fissi,
esterni alla macchina.
Fig. 02. Avvolgimento a gabbia di scoiattolo posto sul rotore.
In fig. 03.a è mostrata una sezione schematica della struttura della macchina con rotore di tipo
avvolto: vi sono tre morsetti (as, bs, cs) per l'avvolgimento di statore (primario) ed altri tre (ar,
br, cr) per l'avvolgimento di rotore (secondario). In fig. 03.b, che si riferisce sempre al tipo con
rotore avvolto, gli avvolgimenti sono simbolicamente schematizzati come fossero bobine
concentrate in corrispondenza dei rispettivi assi magnetici, e sono messi in evidenza gli anelli.
Il funzionamento di queste macchine si basa sul principio del campo magnetico rotante (studi
di G. Ferraris, nel 1890); nel tempo lo sviluppo è stato tale che questa macchina è una delle più
diffuse, sia nelle applicazioni industriali che domestiche.
Fig. 03a. Sezione schematica della struttura della macchina con rotore di tipo avvolto.
116
Fig. 03b. Sezione schematica della struttura della macchina con rotore di tipo avvolto. Gli avvolgimenti
sono indicati come bobine concentrate in corrispondenza dei rispettivi assi magnetici; sono messi in
evidenza gli anelli.
La macchina ad induzione si presta a vari modi di funzionamento: il più comune è quello
come motore. Per questo impiego si utilizza soprattutto il tipo con rotore a gabbia mentre
quello con rotore ad anelli è destinato ad impieghi particolari; per semplicità didattica si fa però
qui riferimento proprio al tipo con rotore avvolto, essendo comunque sostanzialmente analogo
lo studio del funzionamento per le due tipologie.
2. Funzionamento con avvolgimento secondario aperto e rotore fermo.
2.1. Il campo rotante e le f.e.m. indotte.
Si studia dapprima il funzionamento della macchina nelle seguenti condizioni (fig. 04):
rotore fermo;
avvolgimenti di statore alimentati con un sistema di tensioni alternate sinusoidali
simmetriche Vas , Vbs , Vcs , a frequenza f e valore efficace V1 costanti (fig. 05);
morsetti di uscita degli avvolgimenti trifase di rotore non connessi ad un circuito
esterno;
assi magnetici di avvolgimenti di fase corrispondenti di statore e di rotore allineati
(questa ipotesi non limita la validità dello studio, ma consente di avere f.e.m. indotte
degli avvolgimenti di statore e di rotore in fase tra loro).
Fig. 04. Funzionamento a vuoto di una macchina asincrona con rotore avvolto.
117
L'avvolgimento di statore, alimentato con un sistema simmetrico di tensioni sinusoidali con
pulsazione , è percorso da un sistema trifase equilibrato di correnti, I as m , I bs m , I cs m ,
aventi valore efficace Im. Esse generano pertanto nel traferro un campo principale di f.m.m.
(fig. 05) avente espressione:
mm e , t M m cos t e K M 1 I m cos t e ,
dove Mm è l'ampiezza massima del campo di f.m.m. rotante al traferro e e è l'angolo elettrico,
pari al prodotto dell’angolo meccanico per il numero delle paia di poli (n=p/2); e è
computato a partire da una opportuna posizione angolare lungo la periferia.
Fig. 05. Diagrammi vettoriali nel funzionamento a vuoto con rotore fermo.
La velocità di rotazione elettrica del campo rotante vale e = . La velocità di rotazione
meccanica 0 vale:
0
4 f
p
p 2
rad
s ,
ovvero:
N0
2 f
p
giri 120 f
s
p
giri
min
.
Il campo rotante di f.m.m. produce un campo rotante di induzione magnetica, avente la
medesima forma d'onda: l'effetto di tale campo è quello di indurre delle f.e.m. in tutti i
conduttori attivi della macchina, sia nello statore che nel rotore.
D'altra parte, dato che i morsetti esterni degli avvolgimenti rotorici sono aperti, non vi può
essere circolazione di corrente in tali avvolgimenti: pertanto alla generazione del campo rotante
danno contributo le sole correnti statoriche.
Per quanto riguarda le f.e.m. indotte dal campo rotante, per l'ipotesi di rotore fermo, tutti i
conduttori attivi della macchina vedono un campo rotante alla medesima velocità: pertanto le
f.e.m. indotte in tali conduttori (sia di statore che di rotore), e quindi quelle complessive di fase,
sono caratterizzate dalla stessa frequenza f, pari a quella delle tensioni di alimentazione.
Il valore massimo nel tempo della f.e.m. (avente forma d'onda sinusoidale) indotta in un
singolo conduttore è pari a:
1
Eco max ,
2
dove è il flusso di un polo. Dunque il valore efficace di tale f.e.m. è pari a:
Eco
Eco max
2
2
f .
118
Il flusso , che attraversa il traferro e che induce in ogni conduttore attivo una f.e.m. di valore
Eco, costituisce il flusso utile della macchina, cioè il flusso che concatena in uguale misura i
conduttori di statore e quelli di rotore (flusso mutuo, o principale): in tale senso il flusso , pur
essendo costante come forma e rotante nel traferro, assume in termini di concatenamento il
medesimo significato del flusso utile considerato nello studio del trasformatore (fisso nello
spazio e variabile nel tempo).
Le f.e.m. di fase di statore e di rotore, indotte dal flusso magnetico rotante, hanno espressione:
E1 j
U e1
2
2
E2 j
U e2
2
2
dove Ue1 ed Ue2 sono i numeri di conduttori di un avvolgimento di fase statorico e di uno
rotorico.
2.2. Rappresentazione vettoriale sul piano della macchina.
L'interpretazione vettoriale di queste considerazioni è mostrata in fig. 05: come riferimento
dei vettori, in tale figura si è adottato un piano complesso il cui asse reale coincide con l’asse
della prima fase di statore (as). Come nello studio dei sistemi trifase, è quindi possibile fare
riferimento ad una sola fase; per le altre due fasi tutto avviene identicamente, salvo lo
sfasamento di 120° e 240° rispettivamente.
Le grandezze elettriche (tensione, f.e.m., corrente) ed i parametri (resistenza, induttanza)
relativi alla prima fase statorica (as) saranno indicati col pedice 1; il pedice 2 sarà usato per le
corrispondenti grandezze e parametri relativi alla prima fase rotorica (ar).
Le tre correnti statoriche sono praticamente magnetizzanti e quindi sfasate di 90° in ritardo
rispetto alla tensione di fase ai morsetti; esse danno luogo ad un campo di f.m.m. rotante
(costante nel tempo e mobile nello spazio) m m . Poiché l’asse reale del piano complesso
(mediante cui rappresentare le grandezze temporali, quali tensioni, correnti e f.e.m.) coincide
con l’asse della fase as, il vettore mm è in fase col vettore della corrente I as m della fase as. Si
ricorda che la f.m.m. statorica mm (e così pure la rotorica) è unica e dovuta a tutte e tre le
correnti. Il campo m m dà luogo ad un campo di induzione magnetica al traferro, in fase con
esso, rappresentabile mediante il vettore flusso .
L'espressione della f.e.m. in un
conduttore vale pertanto anche in termini vettoriali, per cui si può scrivere:
Eco
j
2 2
.
Le f.e.m. di fase della prima fase (a) dell'avvolgimento di statore ( E as E1 ) e di rotore
( E ar E 2 ) risultano pari a:
E1 U e1 E c
E 2 U e2 E c
.
Esse sono sfasate di 90° in anticipo rispetto al flusso . Dunque tali f.e.m. sono legate fra loro
in modo simile a quanto avviene in un trasformatore ideale:
E1 U e1 Eco U e1
k .
E2 U e 2 Eco U e 2
Per la legge di Kirchhoff delle tensioni, le f.e.m. statoriche devono essere uguali alle rispettive
tensioni (trascurando la piccola caduta di tensione nell’avvolgimento):
E as Vas ,
E bs Vbs ,
E cs Vcs
( E1 V1 ) .
119
3. Funzionamento con avvolgimento secondario chiuso e rotore fermo.
Si consideri che il rotore sia sempre mantenuto nella posizione fissa considerata nel paragrafo
precedente e i morsetti connessi agli anelli dell’avvolgimento trifase di rotore siano chiusi in
corto circuito (fig. 06).
La chiusura dei morsetti degli avvolgimenti rotorici comporta la circolazione di una terna
equilibrata di correnti sinusoidali. Ogni corrente rotorica di fase è così caratterizzata:
la sua ampiezza dipende dall’ampiezza della f.e.m. di fase E 2 e dall’impedenza di fase
complessiva vista da ciascuna f.e.m.;
la sua frequenza è la stessa ( f ) della f.e.m. che la sostiene;
la sua fase dipende dall'angolo caratteristico dell'impedenza rotorica complessiva di
ciascuna fase. Essendo l’impedenza di tipo ohmico – induttivo, tale corrente è in ritardo
rispetto alla f.e.m. E 2 .
E' importante osservare che anche le tre correnti rotoriche danno luogo ad un campo rotante a
distribuzione sinusoidale, rappresentabile pertanto con un vettore ( m2 , fig. 07); la velocità di
rotazione di m 2 è la stessa della velocità di rotazione del campo di f.m.m. prodotto dalle
correnti di statore ( m m ).
Fig. 06. Funzionamento con avvolgimento secondario chiuso e rotore fermo. Schema della macchina.
Fig. 07. Funzionamento con avvolgimento secondario chiuso e rotore fermo. Diagramma vettoriale.
120
3.1. Effetti delle f.m.m. agenti al traferro.
Analogamente a quanto fatto per la f.m.m. di statore, anche quella di rotore si può esprimere
in funzione della corrente di fase I 2 :
m2 K M 2 I 2
.
Riguardo alla direzione di m2 , si consideri quanto segue (fig. 06 e 07). Le tre correnti
statoriche I as m , I bs m , I cs m , entranti nell’avvolgimento statorico, danno luogo al campo di
f.m.m. rotante mm , diretto come la corrente I as m nella fase as ( I m in fig. 07).
Le tre correnti rotoriche, dovute alle tre f.e.m. rotoriche E a r , Eb r , E c r e quindi uscenti
dall’avvolgimento rotorico, danno luogo ad un campo di f.m.m. m 2 diretto in senso opposto
alla corrente della prima fase (ar) I a r I 2 .
Tale f.m.m. m 2 modifica il valore del flusso al traferro; ne segue una variazione delle f.e.m
E a s , Eb s , E c s , che a vuoto sono uguali alle tensioni ai morsetti Vas , Vbs , Vcs , (legge di
Kirchhoff delle tensioni). Dovendo valere quest’ultima legge, viene assorbita un’ulteriore terna
di correnti dal lato primario ( I a' s , I b' s , I c' s ), così da riportare il flusso al valore iniziale e
soddisfare la legge di Kirchhoff delle tensioni (si trascurano qui la resistenza e la reattanza di
dispersione statoriche).
Questa terna di correnti dà luogo ad un campo di f.m.m. rotante m 2' , uguale e contrario al
campo prodotto dalla f.m.m. rotorica m 2 :
m 2' m 2
.
Il campo di f.m.m. statorico risulta quindi:
m1 m m m 2' m m m2
.
La relazione esistente tra le correnti risulta essere, relativamente alla prima fase (as e ar):
'
I as I as m I as
I1 I m I 2'
cioè
.
Le correnti I a r I 2 e I a' s I 2' sono tra loro in fase; la relazione tra i loro moduli è pari a
quella dei moduli delle f.m.m m2 ed m2' , dovute rispettivamente ad una terna di correnti
statoriche ed a una di correnti rotoriche.
I 2'
I2
Ue2
U e1
1
k
.
Questa relazione è tipica delle correnti ai morsetti di un trasformatore ideale, avente rapporto di
trasformazione k uguale a quello con cui sono legate le f.e.m. E1 ed E 2 .
Considerato che gli avvolgimenti delle due strutture sono contemporaneamente percorsi da
corrente si verifica, dal punto di vista magnetico, una situazione sul tipo di quella schematizzata
121
in fig. 08: nella figura (che ha uno scopo di supporto puramente qualitativo) ciascuno degli
avvolgimenti di statore e di rotore è simbolicamente rappresentato come costituito da una cava.
Fig. 08. Rappresentazione dei flussi di dispersione statorico 1d e rotorico 2d e del flusso comune .
Il flusso , che attraversa il traferro, è il flusso comune, ugualmente concatenato con gli
avvolgimenti di statore e di rotore. Oltre al flusso (cui è legato lo sviluppo della coppia
meccanica), vi sono anche dei flussi di dispersione: il flusso indicato in fig. 08 con 1d è un
flusso sostenuto dalle sole correnti primarie e che concatena unicamente gli avvolgimenti di
statore, mentre il flusso 2d è sostenuto e concatena unicamente le correnti di rotore.
L'effetto dei flussi di dispersione è unicamente quello di creare negli avvolgimenti che li
producono delle f.e.m. autoindotte. Queste f.e.m. sono convenientemente rappresentabili, dal
punto di vista circuitale, con delle induttanze di dispersione (L1d, L2d), analogamente a quanto
fatto per il trasformatore. Considerando poi che la frequenza di tutte le grandezze elettriche (sia
di statore che di rotore) è quella di rete (f), si può fare riferimento alle corrispondenti reattanze:
X 1d L1d
X 2 d L2 d .
La corrente magnetizzante I m , che sostiene il flusso, risulta responsabile delle f.e.m. indotte, a
questo legate. Quindi, sempre in analogia con il trasformatore, le f.e.m. si possono esprimere in
funzione della I m ; in particolare per la E1 si può porre:
E1 j X m I m ,
dove la reattanza Xm è detta reattanza di magnetizzazione.
In base alle relazioni trovate, ai morsetti del trasformatore ideale si ha il seguente bilancio di
potenze:
E1 I '2 E 2 I 2 .
Questa relazione esprime l'uguaglianza delle potenze attive e reattive trasferite dal primario al
secondario, cioè delle potenze trasmesse al traferro tra statore e rotore (relativamente però ad
una sola delle tre fasi della macchina).
3.2. Circuito equivalente a rotore bloccato.
Tenendo conto delle reattanze di dispersione e di magnetizzazione e delle resistenze degli
avvolgimenti, per la macchina asincrona a rotore bloccato si può introdurre il circuito
equivalente monofase di fig. 09, valido per ciascuna fase (a, b, c) di statore (pedice 1) e di
rotore (pedice 2); questo circuito equivalente è del tutto simile a quello ricavato per il
trasformatore. Il funzionamento della macchina è però essenzialmente legato alla sua struttura
122
trifase: infatti, le f.e.m. E1 ed E 2 sono indotte dal flusso principale , prodotto dall'azione
contemporanea delle correnti trifasi equilibrate delle due strutture e rotante nel traferro. In
termini di grandezze vettoriali il circuito di fig. 09 corrisponde, per ciascuna fase, alle seguenti
equazioni:
V1 E1 R1 I1 j X 1d I1
E 2 R2 I 2 j X 2 d I 2 ,
dove R2 è la resistenza di fase propria dell'avvolgimento rotorico. Nel seguito, salvo
specificazione apposita, si considera il funzionamento della macchina con anelli cortocircuitati,
cioè senza la connessione di una resistenza esterna a ciascuna spazzola degli avvolgimenti di
rotore.
Va infine detto che il fatto che i conduttori degli avvolgimenti di rotore (ovviamente dotati di
resistenza) siano percorsi da corrente e siano immersi in un campo di induzione magnetica
implica che su di essi agiscano delle forze; l'effetto globale di queste forze è quello di dare una
coppia meccanica, agente sull'albero nella medesima direzione di rotazione del campo rotante.
Fig. 09. Circuito equivalente di una fase della macchina asincrona trifase con rotore fermo.
4. Funzionamento con avvolgimento secondario aperto e rotore in movimento.
Si consideri un campo magnetico rotante al traferro con velocità meccanica 0 [rad/s] (N0
[giri/min]) e si supponga che il rotore (i cui avvolgimenti sono sempre aperti) sia mantenuto in
rotazione con velocità [rad/s] (N [giri/min]), nel medesimo senso di rotazione del campo
rotante.
Per effetto del campo rotante, nei conduttori di statore (fissi nello spazio) sono indotte delle
f.e.m. con la medesima frequenza del caso studiato nel Par. 2 .
Viceversa, considerato un conduttore generico del rotore, la velocità meccanica del campo
rotante rispetto a tale conduttore risulta pari a:
r = 0 –
.
Si definisce scorrimento (relativo) la quantità:
s
0
0
.
Per = 0 s = 1;
per = 0 s = 0;
per > 0 s < 0 .
Pertanto la velocità del campo rotante rispetto al conduttore di rotore vale:
r = s · 0 .
123
La situazione è perfettamente analoga a quella studiata nel Par.2, salvo che la velocità vale s
volte quella precedente: del medesimo fattore s risulta pertanto ridotta l'ampiezza della f.e.m.
indotta nel generico conduttore di rotore e la frequenza di tale f.e.m. (cfr. anche il cap. 8 del
campo magnetico rotante). Dunque la frequenza della f.e.m. di rotore vale:
f2 s f ,
mentre il valore efficace della f.e.m. in ogni conduttore è pari a:
Eco s Eco ,
dove:
Eco è il valore efficace della f.e.m. indotta in un conduttore di rotore quando
quest'ultimo ruota alla velocità ;
Eco è il valore efficace della f.e.m. indotta nello stesso conduttore di rotore quando
questo è fermo (tale f.e.m. coincide in ogni caso con quella indotta in un conduttore di
statore).
Naturalmente anche la f.e.m. complessiva dell'avvolgimento di fase di rotore è caratterizzata da
una frequenza f 2 s f (detta frequenza di scorrimento) e la sua ampiezza vale:
E2 s E2
.
E' evidente che, qualora il rotore ruoti alla stessa velocità del campo rotante, si ha:
s=0 ,
da cui:
E2 0 .
Tale risultato si giustifica osservando che in questa situazione i conduttori attivi di rotore si
muovono in sincronismo con il campo, non tagliando le sue linee di flusso (ovvero, il flusso
concatenato con ciascuna spira di rotore non varia nel tempo): non vi possono dunque essere
f.e.m. indotte (cfr. Cap.8 sul campo magnetico rotante).
5. Funzionamento con avvolgimento secondario chiuso e rotore in movimento.
Si consideri che il rotore venga mantenuto in rotazione ad una generica velocità e i morsetti
dell'avvolgimento trifase di rotore siano sempre collegati, tramite il sistema di spazzole, a tre
morsetti di altrettante resistenze, uguali fra loro e aventi gli altri tre morsetti collegati a stella.
Per effetto delle f.e.m. indotte negli avvolgimenti di rotore, circola una terna equilibrata di
correnti sinusoidali. Ogni corrente rotorica di fase è così caratterizzata:
la sua ampiezza dipende dalla ampiezza ( E 2 s E 2 ) della f.e.m. di fase e dalla
impedenza di fase complessiva vista da ciascuna f.e.m.;
la sua frequenza è la stessa ( f 2 s f ) della f.e.m. che la sostiene;
la sua fase dipende dall'angolo caratteristico dell'impedenza rotorica complessiva di
ciascuna fase R2 j s X 2d .
5.1. Velocità dei campi rotanti.
E' importante osservare che anche le correnti rotoriche danno luogo ad un campo rotante a
distribuzione sinusoidale, rappresentabile pertanto con un vettore ( m 2 ). La velocità di
rotazione di m2 rispetto al rotore (in quanto sede delle correnti che creano tale campo) vale:
2 f 2 s 2 f
rad
s 0
p 2 p 2
s
.
124
D'altra parte il rotore si muove con una velocità di rotazione pari a:
1 s 0
;
pertanto la velocità del campo rotante di rotore rispetto allo statore (somma delle due velocità)
risulta pari ad 0.
Si può dunque concludere che i due campi di f.m.m. ruotano sincroni al traferro, così come
avveniva quando il rotore era mantenuto fermo.
5.2. Circuiti equivalenti e trasformazione di frequenza.
Da quanto detto si conclude che tutte le grandezze di funzionamento della macchina sono
caratterizzate dal fatto di essere sinusoidali. La frequenza f1 delle grandezze elettriche di statore
è quella della rete di alimentazione ( f ); invece, la frequenza delle grandezze elettriche di rotore
è legata, come visto, allo scorrimento s dalla relazione:
f2 s f
.
Pertanto, indicate sempre con X1d ed X2d le reattanze di dispersione, entrambe calcolate alla
frequenza di rete f, le equazioni elettriche, scritte in termini di vettori corrispondenti alle
grandezze istantanee, assumono il seguente aspetto:
V1 E1 R1 I1 j X 1d I1
E 2 R 2 j s X 2 d I 2 ,
dove E 2 è il vettore f.e.m. indotta in una fase del rotore quando esso ruota con velocità (o
N). Si osservi che i vettori delle due equazioni scritte sono rappresentativi di grandezze
sinusoidali non tutte isofrequenziali fra loro: essi non sono pertanto direttamente confrontabili,
né è possibile rappresentare in un unico circuito equivalente il funzionamento dei circuiti di
statore e di rotore.
L’equazione relativa alle grandezze di rotore corrisponde al circuito equivalente di fig.10a: le
varie quantità che compaiono in questa equazione sono numeri complessi costanti, individuati
da una ampiezza e da una fase. Se ora si divide il primo membro della equazione e l'impedenza
a secondo membro per lo scorrimento s, si ottiene:
E2
s
R
2 j X 2d I 2
s
.
Fig. 10a e 10b. Circuito equivalente di una fase rotorica, rispettivamente riferito al lato rotore e al lato
statore.
125
Riguardo a questa nuova equazione si può osservare quanto segue:
il vettore corrente I 2 è rimasto inalterato a seguito della trasformazione effettuata;
la reattanza che compare nell'equazione trasformata (X2d) è quella corrispondente alla
frequenza di rete ( X 2d L2d );
l'angolo caratteristico dell'impedenza R2 j s X 2d è rimasto inalterato in
R2 s j X 2d ed è pari a:
s X 2d
;
2 arctan
R2
il modulo E 2 s del vettore a primo membro dell’equazione trasformata è legato
alla f.e.m. secondaria a rotore fermo (E2) dalla relazione (cfr. Par. 4):
E2
E2
s
;
in base a quest'ultima eguaglianza e considerato che, a seguito della trasformazione, I 2
e 2 non sono cambiati, si può scrivere in termini vettoriali:
E2
E2
s
.
L'equazione trasformata può dunque riscriversi così:
R
E 2 2 j X 2d I 2
s
.
Questa è un’equazione di grandezze vettoriali costanti, formalmente equivalente a quella
inizialmente scritta per il circuito secondario di rotore: tuttavia ora i vettori dell’equazione
trasformata sono rappresentativi di grandezze sinusoidali alla frequenza di rete f. Tale
equazione può dunque essere interpretata mediante il circuito equivalente di fig.10b. Questo
circuito è ora confrontabile con quello di statore; se ne deduce il circuito equivalente (relativo
ad una fase) mostrato in fig.11, dove in parallelo alla reattanza di magnetizzazione Xm è stata
posta una resistenza Rp, rappresentativa delle perdite nel circuito magnetico.
Fig. 11. Circuito equivalente completo di una fase della macchina asincrona trifase con rotore in
movimento. E’ evidenziata la potenza Pt trasmessa da statore a rotore (è divisa per tre, in quanto questo
è il circuito equivalente di una fase).
126
6. Circuiti equivalenti per lo studio del funzionamento.
Osservando il circuito di fig.11 si riconosce che esso ha la medesima struttura di quello di fig.
09, valido per il motore funzionante a rotore bloccato: dal punto di vista circuitale, il
funzionamento con rotore in movimento (con conseguente sviluppo di potenza meccanica Pm)
si può interpretare in modo simile al caso di rotore bloccato, pur di sostituire alla resistenza R2
una resistenza R2/s, rappresentativa di tutta la potenza trasferita al rotore.
6.1. Interpretazione magnetica ed energetica della trasformazione di frequenza.
Dal punto di vista magnetico la f.m.m. prodotta dal rotore in moto ruota sincrona con quella
di statore (come nel caso di rotore bloccato) e questo fatto, visto in termini circuitali,
corrisponde proprio ad un circuito del tipo di fig.10b, funzionante a frequenza di rete f.
Vale la pena di esaminare il significato della trasformazione effettuata anche in termini
energetici. Il fatto che la potenza attiva del circuito secondario di fig.11 sia uguale a quella che
proviene dal primario si verifica dalle equazioni relative alle grandezze elettriche ai morsetti del
trasformatore ideale: infatti le f.e.m. E1 ed E 2 sono legate fra loro sempre tramite il rapporto
del numero di conduttori efficaci, mentre le correnti I 2' ed I 2 sono legate dall'inverso di tale
rapporto (in quanto rappresentative delle f.m.m. agenti al traferro, secondo un diagramma del
tipo di quello di fig. 07, già considerato per il funzionamento a rotore bloccato). Si può dunque
scrivere ( = prodotto scalare):
U e1
U e1 '
E1 I 2'
E 2 I 2' E 2
I 2 E2 I 2
U e 2
U e 2
Per quanto riguarda la potenza reattiva occorre osservare quanto segue:
la potenza reattiva localizzata nelle reattanze del circuito primario non dipende dalla
trasformazione di frequenza effettuata:
E2
Q1 1 X 1d I1 2
Xm
;
la potenza reattiva legata alla induttanza di dispersione secondaria vale:
Q 2 X 2 d I 2 2 .
Pertanto questa potenza reattiva tiene conto della trasformazione di frequenza; d'altra parte
occorre osservare che, rispetto a tale trasformazione, ciò che risulta invariante è l'energia
magnetica immagazzinata (1/2)·L2d·(I2)². La Q2 rappresenta perciò la potenza reattiva
corrispondente a tale energia, riportata alla frequenza di rete.
6.2. Potenza e coppia trasmesse al traferro.
La potenza elettrica attiva assorbita dallo statore, diminuita delle perdite per effetto Joule
negli avvolgimenti di statore e delle perdite nel ferro, costituisce la totale potenza trasmessa da
statore a rotore attraverso il traferro: tale potenza rappresenta la somma della potenza
meccanica e delle perdite Joule negli avvolgimenti di rotore.
La potenza (Pt) trasmessa elettromagneticamente tra statore e rotore può essere così espressa
(con riferimento al circuito secondario di fig.11 e tenendo conto del fatto che la macchina è
trifase):
R
Pt 3 2 I 2 2
.
s
127
Questa potenza trasmessa comprende sia la potenza perduta per effetto Joule negli avvolgimenti
di rotore ( P j 2 3 R2 I 2 2 ), sia la potenza meccanica ( Pm C t ); la coppia qui
considerata (Ct) è quella trasmessa elettromagneticamente tra statore e rotore e differisce da
quella all'albero per effetto della coppia corrispondente alle perdite meccaniche. Dunque si ha:
Pt Pm P j 2
,
cioè:
R
3 2 I 2 2 C t 3 R 2 I 2 2
s
Da questa relazione si ricava l'espressione della coppia:
C t 3 R 2 I 2 2
1 s
s
.
.
Ricordando che la velocità di rotazione del rotore () e quella del campo rotante (0) sono così
legate:
1 s 0 ,
l'espressione della coppia diviene:
Ct 3
P
R2 s
2
I2 t
0
0
.
La coppia è dunque pari alla potenza trasmessa tra statore e rotore divisa per la velocità del
campo rotante.
Il circuito equivalente di fig.11 consente di studiare il funzionamento della macchina
asincrona in tutto il campo di velocità: se ne possono ricavare informazioni circa le potenze
elettriche attive e reattive assorbite, perdute e trasmesse, nonché riguardo alla coppia trasmessa
ed alla potenza meccanica.
6.3. Circuito equivalente semplificato della macchina asincrona.
Nello studio del funzionamento è spesso conveniente effettuare alcune trasformazioni sul
circuito equivalente di fig.11:
una prima trasformazione consiste nell'effettuare il riporto al circuito primario dei
parametri del circuito secondario, come mostrato in fig.12; analogamente a quanto
visto nel caso del trasformatore, il riporto si effettua attraverso il quadrato del rapporto
di trasformazione del trasformatore ideale ( k U e1 U e 2 );
una semplificazione del circuito (del tutto simile a quanto fatto per il trasformatore)
consiste nel trasferire il ramo derivato a monte della impedenza primaria, con il
conseguente ottenimento di un'unica impedenza serie (fig.13). Questa operazione
implica, nello studio del funzionamento, un errore di maggiore entità di quanto non
valga l'errore nel caso del trasformatore; in effetti la presenza del traferro implica una
più elevata corrente magnetizzante, come pure dei flussi dispersi di maggiore entità.
Per tali fatti, pur essendo molto spesso adottata, la semplificazione è quantitativamente
meno giustificata.
128
Fig. 12. Circuito equivalente completo di una fase della macchina asincrona trifase riferito al lato
statorico.
Fig. 13. Circuito equivalente ridotto di una fase riferito al lato statorico. E’ evidenziata la potenza Pt
trasmessa da statore a rotore (è divisa per tre, in quanto questo è il circuito equivalente di una fase).
7. Significati di scorrimento e modi di funzionamento della macchina asincrona.
Nella resistenza R2 s viene localizzata, dal punto di vista della equivalenza circuitale, tutta
la potenza trasmessa dallo statore al rotore, costituita dalla potenza meccanica e dalle perdite
Joule complessive del circuito secondario: è quindi opportuno rendere esplicita questa
suddivisione. Conviene pertanto distinguere due resistenze secondarie connesse in serie,
definite dalla seguente relazione:
R2
1
R2 R2 1 .
s
s
Nella prima resistenza si localizzano le perdite Joule del secondario, mentre la resistenza di
valore R2 1 s s rappresenta, moltiplicata per 3 I 2 2 , la potenza meccanica resa dalla
macchina Pm:
1
Pm 3 R2 1 I 22
s
E' importante evidenziare il significato energetico
originariamente definita con riferimento alle velocità:
s
0
0
della
grandezza
scorrimento,
.
In base al circuito equivalente di fig. 11, la potenza trasmessa tra statore e rotore è pari a:
129
P
R
Pt 3 2 I 2 2 J 2
s
s
,
da cui:
s
PJ 2
.
Pt
Dunque lo scorrimento s corrisponde al rapporto tra le perdite Joule complessive negli
avvolgimenti secondari e la potenza trasmessa al traferro tra statore e rotore.
7.1. Caratteristica meccanica della macchina asincrona trifase.
La quantità di maggiore interesse è la coppia trasmessa elettromagneticamente tra statore e
rotore. Tale quantità si può calcolare in base all’espressione ottenuta nel Par. 6:
P
Ct t ,
0
essendo Pt la potenza trasmessa al traferro ed 0 la velocità meccanica del campo rotante
[rad/s].
L'espressione della coppia in funzione dei parametri della macchina e delle grandezze
funzionali (tensione di alimentazione, scorrimento) si può facilmente determinare se si fa
riferimento al circuito equivalente semplificato di fig.13.
Infatti, noto il valore efficace (V1) della tensione di fase di alimentazione, il quadrato della
corrente I '2 vale:
I 2' 2
V12
2
'
R R2 X X ' 2
1d
2d
1
s
avendo posto:
V12
R2'
2
Z 2 R1
s s
R2'
Z 2 R1 2 X 1d X 2' d
2
2
,
.
Considerando che, in generale, per la coppia trasmessa vale la relazione:
R '2
s
Ct 3
0
2
I '2
,
ne consegue (sempre con riferimento al circuito equivalente semplificato di fig.13):
Ct
3 V12
R'
R
sZ
0 Z 2 2 1
Z
s Z
R2'
.
Questa espressione evidenzia la dipendenza della coppia dallo scorrimento s: la funzione
Ct=Ct(s) (oppure Ct=Ct()) prende il nome di caratteristica meccanica della macchina.
Per 1 s 0 0 0 , si ha il funzionamento da motore. Infatti:
la potenza trasmessa da statore a rotore Pt è positiva (quindi viene assorbita potenza
dalla rete elettrica);
la potenza meccanica resa all’albero Pm è positiva (cioè fornita al carico meccanico).
130
Il campo di funzionamento come motore è delimitato dalle seguenti condizioni limite:
funzionamento a rotore fermo: = 0 (s = 1):
oltre che alla condizione di rotore permanentemente bloccato, corrisponde alla situazione
di avviamento di un motore a partire da fermo (funzionamento allo spunto);
funzionamento a vuoto: = 0 (s = 0):
questa condizione corrisponde alla completa assenza di coppia resistente di carico, cui fa
riscontro, per reazione, un valore nullo della coppia motrice. Infatti il motore, partendo da
fermo, tende ad accelerare fino a raggiungere la velocità del campo rotante (0): a tale
velocità si annullano le f.e.m. di rotore, dunque le correnti di rotore ed anche la coppia.
In realtà, questa situazione di funzionamento, pur essendo molto prossima a quella di un motore
alimentato e con l'albero libero di ruotare, non si verifica in modo rigoroso, in quanto le perdite
meccaniche di attrito e di ventilazione connesse alla rotazione del rotore costituiscono un carico
meccanico ineliminabile. E’ per questa ragione che la potenza trasmessa è leggermente
superiore a quella meccanica disponibile all'albero: la differenza è costituita proprio dalle
perdite meccaniche.
In fig. 14a è rappresentato l'andamento tipico della caratteristica meccanica di una macchina
asincrona con velocità variabile tra – e + . La zona tra 0 0 (1 s 0) corrisponde al
funzionamento da motore. In ascissa si può notare un doppio riferimento: quello della velocità
di rotazione è orientato verso destra ed ha origine nel punto di intersezione degli assi; il
riferimento dello scorrimento è orientato in direzione opposta (si ricorda che: s=(0 )/0)
ed ha origine in corrispondenza della velocità del campo rotante 0, detta anche velocità di
sincronismo). I dati della macchina rappresentata sono:
Pn = 7.5 kW: potenza nominale da motore;
Vn = 380 V: tensione nominale;
In = 15 A: corrente nominale;
p = 4 poli;
fn = 50 Hz; (si deduce 0 = 1500 giri/min);
n = 1445 giri/min: velocità nominale.
3
Freno
2
Motore
coppia
[per unità]
1
1
0
2
1
s
Ck
Cr/Cn
F
Ct/Cn
0.5
0
0.5
1
1.5
1
0.5
0
1.5
/0
0.5
2
1
Generatore
2
3
4
5
Fig. 14a. Caratteristica meccanica di una macchina asincrona a tensione costante. La coppia Ct è
rapportata al valore nominale Cn; Ck è la coppia di spunto. La velocità è rapportata al valore di
sincronismo 0. Con linea tratteggiata è indicata la caratteristica di un carico meccanico.
131
Il valore della coppia a scorrimento unitario (cui corrisponde una velocità nulla, cioè una
situazione di inizio avviamento) è indicata con Ck (coppia di spunto).
In fig.14a è anche rappresentata (a tratteggio) una possibile caratteristica meccanica Cr= Cr()
di un carico meccanico collegato all'albero del motore. L’avviamento è infatti governato
dall’equazione meccanica del moto rotatorio:
d
Ct C r J
dt
dove J è il momento totale di inerzia.
Il punto di funzionamento di regime è in corrispondenza del punto F, di intersezione delle
caratteristiche meccaniche del motore e del carico.
La condizione di funzionamento usuale si ha per velocità prossime a quelle di sincronismo
0 (s = 2 3 %).
Dall’analisi e dall’elaborazione delle diverse espressioni ricavate per la coppia trasmessa si
possono dedurre le osservazioni di seguito riportate.
La coppia è proporzionale al quadrato della tensione.
La coppia (Ck) allo spunto (s = 1) (funzionamento da motore) vale:
Ck 3
con: I '2k I '2
s 1
R2' I 2' k 2 3
0
V12
0 Z
2
R2' ,
.
Questa coppia è, con buona approssimazione, proporzionale alla resistenza rotorica (R2): tale
valore può pertanto essere variato modificando il valore della resistenza del secondario.
La curva Ct=Ct(s) ha un massimo. Lo scorrimento smax in corrispondenza al quale esso
si verifica (pari allo zero della equazione d C t d s 0 ) vale:
R'
s max 2
Z
(+: funzionamento da motore; : funzionamento da generatore).
Pertanto lo scorrimento in corrispondenza del quale si verifica la coppia massima dipende dal
valore della resistenza secondaria. Sostituendo l'espressione di smax nella equazione della
coppia Ct=Ct(s) si arriva invece a concludere che il valore della coppia massima è:
C t max
3 V12
.
R1
0 2 Z 1
Z
(+: funzionamento da motore; : funzionamento da generatore).
Esso è dunque indipendente dal valore della resistenza secondaria.
Per piccoli valori dello scorrimento (velocità di rotazione prossima a quella del campo
rotante) la coppia è, con buona approssimazione, proporzionale allo scorrimento stesso
ed inversamente proporzionale alla resistenza secondaria. Infatti, per scorrimenti
piccoli (|s| <<1) si ha:
R'2
R1
s
R'2
X 1d X '2d ,
s
132
da cui:
I'2
2
s 2 V1 R2'
2
ed infine (sempre per |s| <<1):
R2'
s
Ct 3
0
2
I ' 2 3 V1 s
2
0 R2'
.
7.2. Funzionamento della macchina asincrona con scorrimento nel campo s > 1 (freno).
Questa condizione di funzionamento per lo scorrimento corrisponde a valori di velocità <0;
pertanto il rotore ruota in senso opposto al campo rotante. La potenza trasmessa da statore a
rotore:
R'
Pt 3 2 I 2'
s
2
è positiva; pertanto la macchina assorbe potenza elettrica dalla rete (trasferendola, a meno delle
perdite, al rotore). Inoltre la macchina assorbe anche potenza meccanica (perché tale potenza
Pm C t , pensata come erogata all'albero, è negativa, essendo <0):
1
Pm 3 R2' 1 I 2'
s
2
Tutta la potenza viene dunque dissipata all'interno: il funzionamento in questa zona di
scorrimento è quello di un freno.
7.3. Funzionamento della macchina asincrona con scorrimento nel campo s < 0 (generatore).
In tale zona di funzionamento la velocità di rotazione è nel medesimo senso del campo
rotante, ma di valore superiore alla sua velocità 0: lo scorrimento s è quindi negativo. Si
analizzino la potenza trasmessa da statore a rotore Pt e la potenza meccanica resa all’albero Pm:
R'
Pt 3 2 I 2'
s
2
2
1
Pm 3 R2' 1 I 2' .
s
Entrambe sono negative, per cui:
è positiva la potenza trasmessa dal rotore allo statore e poi da questo verso la rete;
la potenza meccanica è negativa, cioè in realtà assorbita all'albero.
In conclusione, la macchina funziona da generatore, perché assorbe potenza meccanica,
erogandola sotto forma elettrica (a meno delle perdite).
8. Avviamento (“spunto”) dei motori asincroni.
L'avviamento dei motori asincroni direttamente alimentati dalla rete costituisce un problema
rilevante dal punto di vista impiantistico e funzionale. Infatti, la corrente naturale assorbita allo
spunto e durante l'avviamento è dell'ordine di 5÷8 volte la corrente nominale e diminuisce
lentamente:ciò si può determinare dal circuito equivalente di fig. 13, che consente di scrivere la
formula:
1
1
V1
I1 s V1
j
Rp
'
X
m
R1 R2 j X 1d X 2' d
s
133
Al variare dello scorrimento s tra 1 e 0 l’andamento del valore efficace della corrente è
riportato in fig. 14b, per lo stesso motore da 7.5 kW dell’esempio.
6
I1/In
5
[per unità]
4
3
2
1
/0
0
0
0.2
0.4
0.6
0.8
1.0
Fig. 14b. Valore efficace della corrente statorica di macchina asincrona a tensione costante. La corrente
I1 è rapportata al valore nominale In. La velocità è rapportata al valore di sincronismo 0.
Questo fatto implica un notevole sovraccarico della rete di alimentazione, con forti cadute di
tensione in linea. Inoltre questa situazione può comportare l'intervento intempestivo delle
protezioni di massima corrente: queste, interpretando l'elevata corrente come un guasto,
provocano in tal caso l'apertura dell’interruttore di alimentazione della macchina.
La soluzione a questo problema viene affrontata in modo diverso, a seconda che il motore
abbia un rotore del tipo ad anelli o del tipo a gabbia. Si analizzerà il solo motore con rotore a
gabbia.
Avviamento di un motore con rotore a gabbia.
Il motore con rotore a gabbia non ha possibilità di collegamento del rotore con un circuito
esterno. Pertanto, allo scopo di contenere le correnti allo spunto, è necessario ricorrere a sistemi
di avviamento che modifichino le condizioni di alimentazione degli avvolgimenti di statore,
riducendo così la tensione applicata a ciascun avvolgimento di fase. Conseguenza di ciò è una
riduzione della coppia motrice, diversamente da quanto avviene nei motori con rotore ad anelli.
Per i motori a gabbia di potenza modesta (in genere non superiore alla decina di kW) e che
possono avviarsi con coppia motrice molto bassa si usa spesso l'avviamento stella-triangolo: il
motore viene avviato collegando gli avvolgimenti a stella ed effettuando solo successivamente
il collegamento a triangolo, che viene poi mantenuto indefinitamente.
In tal modo la corrente assorbita nel collegamento a stella si riduce ad un terzo di quella nel
collegamento a triangolo; però anche la coppia subisce una riduzione ad un terzo.
Infatti, detta Vlinea la tensione di linea, si hanno le seguenti due situazioni:
nel collegamento a stella la tensione di ciascun avvolgimento è pari a Vlinea 3 e la
corrente di linea è la stessa di quella di ciascun avvolgimento di fase;
nel collegamento a triangolo la tensione di avvolgimento è Vlinea ( 3 volte che nel
caso precedente) e la corrente di linea è
volte quella del collegamento a stella.
3 la corrente di ciascun avvolgimento, cioè 3
Inoltre, dato che la coppia è proporzionale al quadrato della tensione applicata a ciascun
avvolgimento di fase, anche per questa quantità si ha la riduzione di un fattore 3 nel
collegamento a stella rispetto al collegamento a triangolo.
134
9. Inversione del moto.
Il rotore di un motore trifase tende a ruotare nel verso del campo magnetico rotante prodotto
dall'avvolgimento di statore: il verso di rotazione del campo dipende, oltre che da come è stato
disposto l'avvolgimento trifase, dal senso ciclico con cui si susseguono le tensioni trifase di
alimentazione della macchina. Ne consegue che, scambiando tra loro una coppia di morsetti, si
inverte il senso ciclico e con esso il verso di rotazione del campo rotante. Quando questa
commutazione dei morsetti di alimentazione viene effettuata con il motore funzionante a
velocità prossima a quella del campo rotante, a seguito della commutazione lo scorrimento
della macchina assume un valore pari a: s 2 (infatti risulta: 0). In queste condizioni la
macchina funziona da freno e rallenta.
10. Grandezze nominali.
La potenza nominale Pn di un motore asincrono è pari alla potenza meccanica disponibile
all’asse, nelle condizioni di alimentazione nominali (tensione, corrente, frequenza nominali).
Il fattore di potenza è sempre inferiore all’unità ed assume valori piuttosto bassi; la zona di
funzionamento si estende, quindi, tra la velocità di sincronismo (scorrimento s = 0) e la velocità
cui corrisponde il massimo fattore di potenza (generalmente s 0.05).
Definita la potenza nominale Pn, tramite il rendimento n e il fattore di potenza cosn nominali
si determina la potenza assorbita in condizioni nominali An:
An
Pn
n cos n
.
Da questa si ricava la corrente nominale:
In
An
3 Vn
.
Poiché n e cosn non sono noti a priori, sulla targa del motore sono di solito riportati sia Pn
che In.
Si riportano alcuni dati di motori asincroni trifase a gabbia con:
Vn = 380 V; fn = 50 Hz: tensione e frequenza nominali; p = 4 poli
Pn [kW]
0.120
4
75
630
n [giri/min]
1315
1435
1480
1491
n [%]
56
83
94.5
96.8
cosn
0.75
0.80
0.86
0.88
Ik / In
Ck / Cn
3.0
7.0
6.7
7.0
1.9
2.8
2.5
2.1
All’aumentare della potenza:
La velocità nominale di rotazione aumenta; lo scorrimento nominale diminuisce,
mantenendosi nell’ordine di pochi percento, ad esclusione dei motori di piccola
potenza;
Il rendimento aumenta, raggiungendo valori molto alti anche per motori di
piccola/media potenza (75kW);
Il fattore di potenza aumenta; esso risulta comunque inferiore a 0.90, comportando la
necessità dell’uso di condensatori di rifasamento.
Per un generatore, la potenza nominale è la potenza elettrica An erogata ai morsetti a tensione,
corrente e velocità nominali; si misura in [VA].
135
Esempio 1
Un motore asincrono trifase a gabbia a p=6 poli, 380V, f=50 Hz ha una resistenza statorica di fase pari a
R1=0.5 alla temperatura di funzionamento. Trascurando le perdite nel nucleo in ferro, determinare la
coppia elettromagnetica quando la potenza assorbita vale Pel = 5 kW e la corrente di fase è I1 = 11 A .
4 f
= 104.7 rad/s = 1000 giri/min.
p
Trascurando la perdita nel ferro, la potenza trasmessa da statore a rotore Pt vale:
La velocità di sincronismo vale: 0
Pt Pel 3 R1 I12 = 4.82 kW
La coppia elettromagnetica vale quindi:
Ct
Pm
P
... t = 46.1 Nm
0
Esempio 2
Un motore asincrono trifase a gabbia da è caratterizzato da:
Vn = 380 V;
In = 284 A;
p=8 poli; fn = 50 Hz;
Pn = 160 kW,
I parametri del motore sono:
R1=0.9910-2 ; R’2=1.5910-2 ;
X1d= X’2d = 5.7010-2 ;
Le perdite nel ferro sono trascurabili.
n = 735 giri/min .
Xm = 3.24
Determinare:
lo scorrimento e la coppia nominali;
lo scorrimento di coppia massima e la relativa coppia;
la coppia di spunto, tramite l’espressione approssimata;
la corrente di spunto.
La coppia nominale del motore (cioè la coppia netta all’albero) è data da:
P
Cn n = 2080 Nm
n
La velocità di sincronismo è pari a 0
4 fn
= 78.5 rad/s = 750 giri/min.
p
Lo scorrimento nominale è pari a:
0 n
= 0.020 = 2.0 %
0
Lo scorrimento di coppia massima e la corrispondente coppia sono:
sn
3 V12
R
0 2 Z 1 1
Z
Poiché si sta considerando il circuito equivalente monofase, la tensione V1 è quella di fase:
R'
smax 2
Z
dove Z R12 ( X 1d X 2' d ) 2
V1 Vn
Si ricava: Z = 0.114 ;
smax = 13.9 %;
Ct max
.
3 = 220V,
Ctmax = 7390 Nm = 3.55 Cn.
Allo spunto (s = 1), coppia e corrente valgono:
Ck 3
1
I1 s V1 j
Xm
V12
0 Z
2
R2' = 2230 Nm = 1.07 Cn.
V1
= 1940 A = 6.83 In.
'
'
R1 R2 j X 1d X 2 d
136
La coppia di spunto risulta essere, in questo caso, dello stesso ordine di grandezza della coppia
nominale, mentre la corrente di spunto è molto più elevata del valore nominale. Questa apparente
incongruenza può essere così spiegata:
allo spunto (s=1), il motore si comporta come un carico ohmico–induttivo, ma fortemente
induttivo (si veda il circuito equivalente). La macchina assorbe molta potenza reattiva e poca
potenza attiva; è quest’ultima che viene trasformata in potenza meccanica all’albero. Quindi si
ha una coppia contenuta, ma un’alta corrente assorbita (per l’elevato valore della potenza
reattiva).
A regime, cioè a piena velocità, lo scorrimento è molto piccolo (s = 2–3 %); la macchina si
comporta come un carico ohmico–induttivo, fortemente resistivo e di resistenza elevata (R2/s è
ora elevato). Ciò limita la corrente assorbita.
11. Controllo scalare di una macchina asincrona (regolazione V/f).
La caratteristica meccanica di una macchina asincrona alimentata a tensione e frequenza
costanti è molto rigida (fig. 14), consentendo il funzionamento continuativo in un campo
ristretto di velocità (nell’intorno della velocità di sincronismo). Si vuole invece ottenere la
caratteristica meccanica di fig. 15, caratterizzata da un tratto a coppia costante e da uno a
potenza costante: essa è del tutto simile a quella ottenibile con una macchina in corrente
continua tramite la regolazione di armatura e di campo.
Fig. 15 Caratteristica meccanica desiderata.
Si illustra ora come sia possibile ottenere una caratteristica meccanica come quella di fig. 15.
Nel funzionamento a piccoli valori di scorrimento, la caratteristica meccanica è pressoché
rettilinea. Essa è caratterizzata dalla seguente equazione:
3 V12 s
3 V12 1
Ct
0 R 2'
0 R 2'
1
0
V
3 1
0
2
1
0 .
'
R2
Ricordando il legame tra la pulsazione elettrica e la velocità di sincronismo 0:
p
0 ,
2
si ricava:
2
2
1
V p
C t 3 1
2 R 2'
2
p
.
137
Se si mantiene costante il rapporto V1 , quella riportata è l’equazione di una retta con
coefficiente angolare costante ed intersezione con l’asse delle ascisse per:
0
2 4 f
p
p
.
Variando la frequenza f e la tensione V1 di alimentazione, mantenendo costante il loro rapporto,
la caratteristica meccanica trasla verso destra (fig. 16):
Ad esempio, per un motore da Vn=380V e fn=50 Hz, si può scegliere:
Vn
V1
220 V
3
n
314 rad
0.700 Wb .
s
Fig. 16 Caratteristica meccanica della macchina asincrona al variale della frequenza f e della tensione di
alimentazione V1, mantenendo costante il loro rapporto.
Si consideri l’avviamento di un motore, connesso ad un carico, con una coppia resistente Cr()
(fig. 16). A velocità nulla, la tensione e la frequenza siano scelte di basso valore così che la
caratteristica meccanica sia la curva “a” (fig. 16). Poiché la coppia motrice (coppia
elettromagnetica) è superiore alla coppia resistente, la velocità angolare cresce:
d C Cr
,
dt
J
dove J: momento d’inerzia del motore e del carico.
Durante l’accelerazione la coppia motrice C diminuisce, muovendosi lungo la caratteristica
naturale tra il punto 1 ed il punto 2.
Aumentando sia la tensione V1 che la frequenza f, mantenendo però costante il loro rapporto, il
punto di funzionamento si porta in 3, tale per cui 3 = 2.
Eseguendo una regolazione fine della tensione e della frequenza, l’andamento irregolare a dente
di sega diventa un segmento orizzontale (fig. 17). Si fa notare come si lavori sul tratto lineare
della caratteristica meccanica naturale della macchina.
138
Fig. 17. Andamento della caratteristica meccanica con una regolazione fine della tensione e della
frequenza, mantenendo costante il loro rapporto.
Scelta del valore di coppia e legge di variazione della frequenza f e della tensione V1.
Si sceglie la coppia desiderata come frazione del valore massimo di coppia : CM:
Ct C M .
SI determina la pulsazione delle f.e.m. e delle correnti rotoriche:
2
Ct
3 V12 s
3 V12 p s
V p
3 1 2
2
'
0 R 2'
2
2 R 2'
R2
,
dove 2 s è la pulsazione delle grandezze rotoriche. Ne segue:
2
C t R 2'
2
V p
3 1
2
f2
2
.
2
Si ricava la corrispondente pulsazione statorica (e quindi la frequenza statorica).
2 s 1
0
1
2
p
p ,
2
da cui
2
p
2
f f 2
p
.
4
Si ricava quindi l’andamento della tensione:
p
V
V
V1 1 1 2 .
2
L’andamento lineare della tensione e della frequenza con la velocità è mostrato in fig. 18.
139
Fig. 18. Andamento della coppia, della frequenza e della tensione durante la regolazione V/Hz.
Regolazione a tensione costante
Quando la tensione raggiunge il valore nominale (o un valore leggermente inferiore per
mantenere un margine di tolleranza), non è più possibile incrementare il valore della tensione.
Il valore di velocità corrispondente viene detto “base” ed indicato con b. Per aumentare la
velocità, è possibile agire solo sulla frequenza. Ciò viene attuato mantenendo costante la
potenza erogata.
Per > b, sia V1 = V1n (fig. 18).
All’aumentare della frequenza, per accrescere la velocità, la coppia massima diminuisce. Infatti
si era trovato:
3 V12
Ct max
R1 0 2 Z
0 2 Z 1
0 2
Z
3 V12
3 V12
R1 2 X 1d X 2' d
2
1
ff .
Se, per assurdo, si mantiene costante il coefficiente , rapporto tra la coppia prescelta e la
coppia massima, la potenza erogata diminuisce con la velocità. Infatti:
Ct * Ct M *
1
2
P Ct
1
2
1
.
140
Per mantenere costante la potenza erogata, occorre aumentare il coefficiente .
Ct
Ct M
3 V12 s
0 R 2'
3 V12
0 2 Z
2Z s
R 2'
2 X 1d X 2' d s
R 2'
2 L1d L'2d s
R 2'
2 L1d L'2 d
R 2'
.
2
Quindi:
2
2 L1d L'2 d
R 2'
.
Regolando la pulsazione rotorica 2, si varia il coefficiente .
Riguardo alla potenza si può scrivere:
C t M
C t
P
1
P b C t b b b C t M b b b
b
2
b
1
b
b
.
Per mantenere costante la potenza al variare della velocità deve essere:
P P b
Ne segue:
b b
b
.
b
b
b
2
2 L1d L'2 d 2 L1d L'2 d
R2'
R2'
Essendo
2
p
2
Ne segue
b
p
b
'
2
2 L1d L2 d
'
R2
b
1 b
p
f
'
2 2 L1d L2 d 2
'
R2
L’andamento è riportato in fig. 18.
141
. 1. Cenni costruttivi e")