CONTROLLI AUTOMATICI
Ingegneria della Gestione Industriale
CONTROLLO IN RETROAZIONE
Ing. Luigi Biagiotti
Tel. 051 2093034 / 051 2093068
e-mail: [email protected]
http://www-lar.deis.unibo.it/~lbiagiotti
Considerazioni generali sul controllo
•
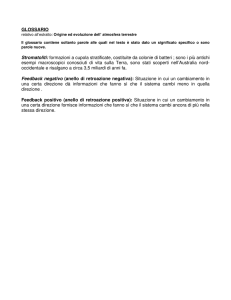
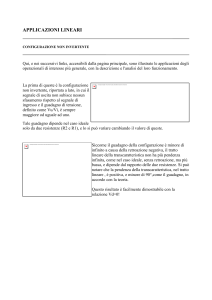
Elementi di un sistema di controllo
comando
di riferimento
yref
ingresso
di controllo
controllore
u
variabile
attuata
attuatore
disturbo
agente sul
sistema
d
ua
errore di controllo
e = y - yref
impianto
(modello)
y
uscita
del sistema
Obiettivo del progetto del sistema di controllo:
• garantire che l'errore di controllo (e) sia il più piccolo possibile e
cioè
• y segua il più fedelmente possibile yref
• in presenza di disturbi (d) non misurabili
• in presenza di incertezze sui parametri del modello
• con azioni di controllo (u) limitate
Luigi Biagiotti
Controlli Automatici
Retroazione -- 2
Considerazioni generali sul controllo
•
Requisiti di un sistema di controllo
•
stabilità
•
e limitato ∀ t
prestazioni statiche
valore dell'errore (modulo) a regime (esaurito il transitorio)
•
con segnale di riferimento e/o di disturbo standard
gradino, rampa,…
prestazioni dinamiche
caratteristiche del transitorio
Luigi Biagiotti
segnali di riferimento standard
Controlli Automatici
Retroazione -- 3
Considerazioni generali sul controllo
•
•
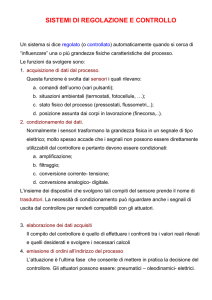
Requisiti di un sistema di controllo
regione di ammissibilità della risposta al gradino
yref
risposta al riferimento
Luigi Biagiotti
risposta al disturbo t
Controlli Automatici
Retroazione -- 4
Controllo ad azione diretta
controllore
attuatore
impianto
sintesi diretta
•
Prestazione dinamica:
•
•
scelta di Geq(s)
Prestazione statica:
•
.
diversi problemi realizzativi, utile come concetto
Luigi Biagiotti
Controlli Automatici
Retroazione -- 5
Sintesi diretta
sintesi diretta
idealmente:
•
Tuttavia il controllore opera senza possedere informazioni circa il
reale andamento dell’uscita y(t), diverso da quello ideale per effetto di
•
•
•
disturbi
errori del modello G(s)
variazioni parametriche
Luigi Biagiotti
Controlli Automatici
Retroazione -- 6
Azione diretta e disturbi
sintesi diretta
Effetto dei disturbi sull’uscita:
sovrapposizione
degli effetti
Errore sull’uscita: il
controllore non agisce sul
disturbo che resta invariato
Luigi Biagiotti
Controlli Automatici
Retroazione -- 7
Azione diretta e variazioni parametriche
sintesi diretta
Variazione del plant per effetto della variazione di un parametro:
Nella sintesi si assume:
Errore sull’uscita
Luigi Biagiotti
Controlli Automatici
Retroazione -- 8
Azione diretta ed errori di modello
sintesi diretta
Errore di modello:
Nella sintesi si
assume:
Errore sull’uscita
Luigi Biagiotti
Controlli Automatici
Retroazione -- 9
Esempi di controllo ad azione diretta
3
3
Sistema da
controllare 2
Dinamica
desiderata
1
00
sintesi diretta
1
2
4
6
8
00
t
Caso ideale
yref s + 1 10
2 s + 10
yref
Luigi Biagiotti
2
Controlli Automatici
u
2
4
6
8
y
2
s +1
10
y
s + 10
Retroazione -- 10
t
Esempi di controllo ad azione diretta
variazione dei parametri
yref s + 1 10
2 s + 10
u
cancellazione imperfetta polo/zero
3
2
y
s + 1 .1
variazione dei parametri
yref s + 1 10
2 s + 10
u
2
s + 1 .3
la dinamica
dello zero
prevale
y
2
1
00
Controlli Automatici
2
4
6
8
t
3
2
G<1
1
00
Luigi Biagiotti
G<1
2
4
6
8
t
Retroazione -- 11
Sintesi diretta
Il progetto per sintesi diretta non è sempre possibile:
• Sistemi con ritardo
• Sistemi non a fase minima
¾ Poli e/o zeri non stabili
• Sistemi (non strettamente) propri
Luigi Biagiotti
Controlli Automatici
Retroazione -- 12
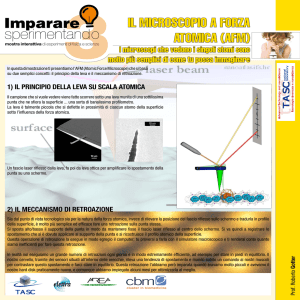
Controllo in retroazione
•
Per limitare i problemi dei controllori in azione diretta, ricorriamo alla
retroazione
yref
controllore
u
attuatore
ua
impianto
(modello)
y
trasduttore
Sistema di controllo
•
Consente di fornire al controllore informazioni circa l’andamento
effettivo dell’uscita y(t)
•
Costi maggiori per la presenza del trasduttore di misura
•
Sono retroazionabili solo le variabili accessibili alla
misura
Luigi Biagiotti
Controlli Automatici
Retroazione -- 13
Schema di controllo in retroazione
+
-
: trasduttore di misura e
di acquisizione del riferimento
: impianto da controllare
•
: attuatore
: regolatore
Schema equivalente in retroazione unitaria
+
Luigi Biagiotti
Controlli Automatici
Retroazione -- 14
Schema di controllo in retroazione
+
-
fdt di anello L(s)
•
Utilizzando il guadagno di anello L(s) otteniamo le seguenti fdt:
Luigi Biagiotti
Controlli Automatici
Retroazione -- 15
Retroazione e disturbi
+
-
•
Se il guadagno di anello L(s) è sufficientemente elevato
•
•
l’uscita y segue fedelmente l’ingresso yref
il disturbo d risulta attenuato
Luigi Biagiotti
Controlli Automatici
Retroazione -- 16
Retroazione e variazioni parametriche
+
Variazione del plant per effetto della variazione di un parametro:
•
Se il guadagno di anello L(s) è sufficientemente elevato
•
Variazioni della fdt di anello vengono attenuate nella fdt
del sistema retroazionato
Luigi Biagiotti
Controlli Automatici
Retroazione -- 17
Sistemi di controllo in retroazione
•
Requisiti
•
Stabilità
•
in condizioni nominali
in condizioni perturbate (stabilità robusta)
Prestazioni
statiche in condizioni nominali
dinamiche in condizioni nominali
per diverse tipologie di segnali di ingresso (ysp, d, n)
valori a regime
per variazioni a gradino dei segnali di ingresso (ysp, d, n)
tempo di assestamento, massimo sorpasso
banda passante, picchi di risonanza
moderazione dell'azione di controllo
statiche e dinamiche in condizioni perturbate (prestazioni
robuste)
Luigi Biagiotti
errori di modello, variazione dei parametri
Controlli Automatici
Retroazione -- 18
Esempi di controllo in retroazione
•
Controllo proporzionale - calcolo della fdt
+
-
Sistema del 1° ordine
+
-
al crescere di k:
il guadagno tende ad 1
il polo (reale) si sposta a sinistra
Luigi Biagiotti
Controlli Automatici
nuovo polo
Retroazione -- 19
Esempi di controllo in retroazione
•
Sistema del 1° ordine con controllo proporzionale
• condizioni nominali
+
•
Risposte al gradino
yref = 1
k=1
1
00
-
1
2
3
Luigi Biagiotti
yref = 1
k = 10
1
4
t
00
1
2
3
yref = 1
k = 100
1
4
t
Controlli Automatici
00
1
2
3
4
t
Retroazione -- 20
Esempi di controllo in retroazione
•
Sistema del 1° ordine con controllo proporzionale
• variazione dei parametri
+
•
Risposte al gradino
yref = 1
k=1
1
00
1
2
3
Luigi Biagiotti
yref = 1
k = 10
nominale
1
4
t
00
-
1
2
3
yref = 1
k = 100
1
4
t
Controlli Automatici
00
1
2
3
4
t
Retroazione -- 21
Esempi di controllo in retroazione
•
Controllo proporzionale – sistema del 2° ordine
Calcolo della fdt
+
-
al crescere di k:
il guadagno tende ad 1
Luigi Biagiotti
Controlli Automatici
Retroazione -- 22
Esempi di controllo in retroazione
•
Sistema del 2° ordine in retroazione unitaria
• condizioni nominali
+
•
-
Risposte al gradino
3
3
2.5
2.5
2.5
2
2
2
1.5
1.5
1.5
1
1
1
0.5
0.5
0.5
0
0
2
4
6
k=1
Luigi Biagiotti
8
10
0
3
0
2
4
6
8
k = 10
Controlli Automatici
10
0
0
2
4
6
8
10
k = 100
Retroazione -- 23
Esempi di controllo in retroazione
•
Sistema del 2° ordine in retroazione unitaria
• variazione dei parametri
+
•
-
Risposte al gradino
3
3
2.5
2.5
2.5
2
2
2
1.5
1.5
1.5
1
1
1
0.5
0.5
0.5
0
0
2
4
6
k=1
Luigi Biagiotti
8
10
0
3
0
2
4
6
8
k = 10
Controlli Automatici
10
0
0
2
4
6
8
10
k = 100
Retroazione -- 24
Esempi di controllo in retroazione
•
Sensitività ai disturbi
Impianto
1
u
(s + 1)
d
+
+
2
y
(s + 2)
d
yref
e
-
k
1
u
(s + 1)
+
+
2
y
(s + 2)
Sistema di controllo in retroazione
Luigi Biagiotti
Controlli Automatici
Retroazione -- 25
Esempi di controllo in retroazione
•
Sensitività ai disturbi
yref
e
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Step Response
0
1
2
3
4
yref = 0, d = 1
k=1
Luigi Biagiotti
+
1
u
(s + 1)
k
-
d
s
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
2
y
(s + 2)
+
Step Response
0
1
2
3
4
yref = 0, d = 1
k = 10
Controlli Automatici
s
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
valore del
disturbo senza
controllo
Step Response
0
1
2
3
4
s
yref = 0, d = 1
k = 100
Retroazione -- 26
Sistemi di controllo in retroazione
•
Schema di riferimento
ysp
+
-
e
+
n
-
R(s)
u
d
G(s)
+ y
+
Matrice delle funzioni di trasferimento
tra le diverse uscite di interesse
e gli ingressi
Luigi Biagiotti
Controlli Automatici
Retroazione -- 27
Errore a regime e tipo di sistema
•
Consideriamo il sistema in retroazione unitaria:
Teorema del valore finale:
Errore a regime nella risposta ad un segnale X(s):
Luigi Biagiotti
Controlli Automatici
Retroazione -- 28
Errore nella risposta al gradino
•
La L-trasformata del gradino di ampiezza A vale:
L’errore rispetto al gradino è detto anche errore di posizione ep
Costante di posizione (o di guadagno):
Il numero (h) di poli nell’origine di G(s) determina il TIPO del
sistema
Se G(s) è di TIPO ≥1 (ha 1 o più poli nell’origine)
Luigi Biagiotti
Controlli Automatici
⇒ ep=0
Retroazione -- 29
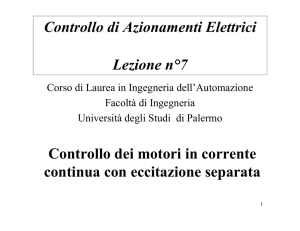
Errore di posizione e tipo di sistema
•
Risposte al gradino
errore a regime
costante
errore a regime
nullo
errore a regime
nullo
1.5
1.5
1.5
1
1
1
0.5
0.5
0.5
0
0
1
2
3
4
sistema di tipo 0
Luigi Biagiotti
5
0
0
5
10
15
20
25
sistema di tipo 1
Controlli Automatici
0
0
5
10
15
20
sistema di tipo 2
Retroazione -- 30
Errore nella risposta alla rampa
•
La L-trasformata della rampa di pendenza A vale:
L’errore rispetto alla rampa è detto anche errore di velocità ev
Costante di velocità:
velocità
In funzione del tipo del sistema avremo:
tipo 0:
ev=∞
tipo 1:
ev=A/K
tipo ≥2: ev = 0
Luigi Biagiotti
Controlli Automatici
Se G(s) è di TIPO ≥2 (ha
2 o più poli nell’origine) ⇒
ev=0
Retroazione -- 31
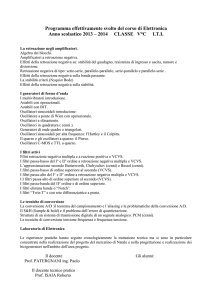
Errore di velocità e tipo di sistema
•
Risposte alla rampa
errore a regime
crescente
errore a regime
costante
errore a regime
nullo
1.5
1.5
1.5
1
1
1
0.5
0.5
0.5
0
0
1
2
3
4
sistema di tipo 0
Luigi Biagiotti
5
0
0
5
10
15
20
25
sistema di tipo 1
Controlli Automatici
0
0
5
10
15
20
sistema di tipo 2
Retroazione -- 32
Errore di accelerazione
•
Analogamente, considerando il segnale:
L’ errore di accelerazione ea risulta:
Costante di accelerazione:
accelerazione
In funzione del tipo del sistema avremo:
tipo 0,1: ea=∞
tipo 2:
ea=A/K
tipo ≥3: ea=0
Luigi Biagiotti
Controlli Automatici
Se G(s) è di TIPO ≥3 (ha
3 o più poli nell’origine) ⇒
ea=0
Retroazione -- 33
Caso generale
G(s)
Kp
Kv
Ka
Tipo 0
Κ
0
0
Tipo 1
∞
Κ
0
Tipo 2
∞
∞
Κ
ep
•
Per segnali, in generale del tipo:
Si ha, indicando con
Luigi Biagiotti
ev
ea
h il tipo del sistema:
Controlli Automatici
Retroazione -- 34
Retroazione non unitaria
•
Nel caso in cui il sistema in
esame presenti una dinamica
H(s) non unitaria sul ramo di
retroazione:
•
Ci si riconduce alla retroazione
unitaria considerando, per il
calcolo dell’errore a regime, lo
schema equivalente:
Luigi Biagiotti
Controlli Automatici
Retroazione -- 35
Esempio
•
•
•
Determinare l’errore a regime del
sistema in retroazione con
ingresso:
a gradino X(s) = 5/s
a rampa X(s) = 5/s2
Per i valori di
+
-
k = 1, 100
Verificare con Matlab/Simulink la correttezza dei risultati
Luigi Biagiotti
Controlli Automatici
Retroazione -- 36
Esempio
•
Determinare gli errori a regime di
posizione, velocita` ed
accelerazione (ep , ev , ea) del
sistema in retroazione con
ingresso il gradino X(s) = 2/s
Verificare con Matlab/Simulink la correttezza dei risultati
Luigi Biagiotti
Controlli Automatici
Retroazione -- 37
Esempio
•
•
Determinare il valore di K per
avere errore a regime < 0.1 con
ingresso a gradino unitario.
Il sistema in retroazione, per tale
valore di K, e` stabile?
+
-
Verificare con Matlab/Simulink la correttezza dei risultati
Luigi Biagiotti
Controlli Automatici
Retroazione -- 38
CONTROLLI AUTOMATICI
Ingegneria della Gestione Industriale
CONTROLLO IN RETROAZIONE
FINE
Ing. Luigi Biagiotti
Tel. 051 2093034 / 051 2093068
e-mail: [email protected]
http://www-lar.deis.unibo.it/~lbiagiotti