Controllo di Azionamenti Elettrici
Lezione n°7
Corso di Laurea in Ingegneria dell’Automazione
Facoltà di Ingegneria
Università degli Studi di Palermo
Controllo dei motori in corrente
continua con eccitazione separata
1
Nella maggior parte degli azionamenti elettrici il motore in corrente continua
viene inserito in un sistema di controllo a retroazione. Alcune delle motivazioni
che portano a questa scelta sono le seguenti:
¾ necessità di operare nel più ampio campo di punti del piano coppia/velocità
con basse perdite e adattando il funzionamento del motore alle caratteristiche
del carico meccanico;
¾ soprattutto per motori di considerevole potenza, il circuito d’armatura presenta
una bassa impedenza che, in alcune situazioni, può portare la corrente
d’armatura ad assumere valori molto più alti di quello nominale (effetto
positivo della forza controelettromotrice);
¾ in situazioni transitorie (accelerazione o frenata), si possono avere
sovracorrenti dovute alle rapide variazioni della tensione d’armatura o della
velocità;
¾ presenza di sovraccarichi meccanici.
¾ necessità di disporre di un controllo veloce su corrente e coppia al fine di
limitarne i valori e proteggere il motore;
2
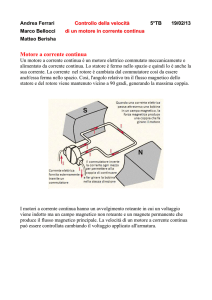
Controllo in retroazione del motore c.c.
3
Modello dell’attuatore
Td
ya
1
Ri + s Li
Va
+
−
1
Ra + s La
Ia
Km
Tm
+
−
1
b+s J
ω
Kb
4
Schema di controllo in cascata
¾ Anello interno con dinamica veloce per il controllo della corrente a cui si
aggiunge un anello esterno per il controllo della velocità.
5
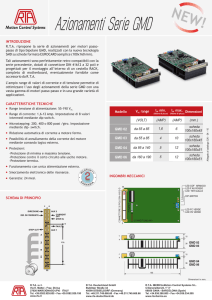
Regolatore di corrente
Td
ya
Va
1
Ri + s Li
+
Ia
1
Ra + s La
−
Tm
Km
+
−
ω
1
b+s J
Kb
¾ La retroazione di velocità legata alla forza controelettromotrice causa uno
scostamento dalla struttura con anelli annidati; è possibile ridisegnare lo
schema nel modo seguente.
Kb
b+sJ
ya
1
R i + s Li
Va
+
−
+
1
R a + s La
KmKb
b+sJ
Td
Ia
Km
Tm +
−
Gia (s ) =
1
b+sJ
ω
(b + J s )
I a (s )
=
Va (s ) [(Ra + La s )(b + J s ) + K b K m ]
6
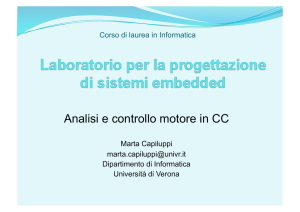
Regolatore di corrente (2)
Kb
b+sJ
I arif +
G ci
ya
a
−
1
R i + s Li
Va
+
−
+
1
R a + s La
Td
Ia
Km
Tm +
−
ω
1
b+sJ
KmKb
b+sJ
¾ regolatore PID
TI TD s 2 + TI s + 1 1
Gci PID ( s ) = K P
sT
TI s
1+ D
N
¾ funzione di trasferimento a catena aperta dell’anello di corrente
a
J
1
+
s
1
1 / Ri
b
TI TD s 2 + TI s + 1
b
F( s ) = KP
s TD
TI s
La J
bLa + JRa
L (bRa + K b K m )
1 +
1 + s i
s2 +
s + 1
N
bRa + K b K m
Ri
bRa + K b K m
14243
regolatore
14243
attuatore
1 4 2 4 3
processo
7