Distribuzione Gaussiana
Nella maggioranza dei casi (ma non in tutti) facendo un istogramma delle misure acquisite
si ottiene una curva a campana detta ‘normale’ o Gaussiana.
G x, ,
1
e
2
1 x
2
2
Gx, , dx 1
= Valor Medio (vedi prossimo lucido)
= deviazione standard (vedi prossimo lucido)
• Si puo dimostrare che l’istogramma ha una forma Gaussiana quando tutte le sorgenti
di inceretezza hanno un contributo molto piccolo e casuale
• Esistono tuttavia altre curve che incontreremo nel corso, come ad esempio la
Binomiale o la Poissoniana
• Poiche la Gaussiana è simmetrica attorno al valore medio allora
Media = Mediana = Moda
Teoremi
Nel caso di un numero N finito di misure, ripetibili ed indipendenti, che possano essere
descritte da una distribuzione gaussiana
G x, ,
allora
1
e
2
1- La migliore stima del parametro è la media
1 x
2
2
1
x
N
N
x
i 1
i
2 – La migliore stima del parametro è la deviazione standard del campione
N
x
(x
i 1
i
x) 2
N 1
3 – L’incertezza relativa sul valore di è data da
incertezza sul valore di x come stima di
2( N 1)
Distribuzione Gaussiana
Nell’ipotesi che i dati misurati si distribuiscano seguendo una curva Gaussiana è possibile
dare una definizione più quantitativa della deviazione standard
• Il 68% delle misure cadrà all’interno dell’intervallo
x ; x
• Il 95% delle misure cadrà all’interno dell’intervallo
x 1.96 ; x 1.96
• il 99.7% delle misure cadrà all’interno dell’intervallo
x 3 ; x 3
Perche il 68% o il 95% ?
G x, ,
Data una gaussiana normalizzata
1
e
2
1 x
2
Gx, , dx 1
x
Allora
G x, , x dx 0.68
x
x 1.96
G x, , x dx 0.95
x 1.96
x 3
G x, , x dx 0.997
x 3
2
Distribuzione Gaussiana
Questa proprietà è vera esclusivamente per una distribuzione Gaussiana.
Per altre distribuzioni potranno valere, caso per caso, percentuali differenti
Per esempio
1 - Poissoniana con valor medio <x> = 8 e = 2.8
In un intervallo di più o meno una deviazione standard cadono il 62% dei conteggi
2 - Poissoniana con valor medio <x> = 10 e = 3.2
In un intervallo di più o meno una deviazione standard cadono il 73% dei conteggi
3 - Poissoniana con valor medio <x> = 5 e = 2.2
In un intervallo di più o meno una deviazione standard cadono il 74% dei conteggi
Nota:
Valor medio e deviazione standard sono definite per un qualsiasi set di dati, tuttavia solo
per il caso della Gaussiana è possibile dimostrare il legame con i parametri della
distribuzione stessa.
Probabilità Integrale – ERF – Funzione degli errori
Come ho fatto a calcolare gli integrali di prima ?
Come posso fare per calcolare l’integrale di una gaussiana per altri intervalli di integrazione ?
Oppure .. più in generale ?
Come faccio a trovare la probabilità che una data misura x0 faccia parte della distribuzione
statistica ‘Gaussiana’ che ha valor medio xbest e ?
Il punto di partenza è l’integrale parametrizzato
xbest
Probabilità Integrale – ERF – Funzione degli errori
Come ho fatto a calcolare gli integrali di prima ?
Come posso fare per calcolare l’integrale di una gaussiana per altri intervalli di integrazione ?
Oppure .. più in generale ?
Come faccio a trovare la probabilità che una data misura x0 faccia parte della distribuzione
statistica ‘Gaussiana’ che ha valor medio xbest e ?
Il punto di partenza è l’integrale parametrizzato
P
xbest x0
t
Gx, , x dx Gx' , ,0 dx'
best
xbest x0
Nota : x' x - x best
xbest x0 t
xbest x0 t
dove
t
dx' dx
t
xbest x0
x 'best 0
Non è una uguaglianza matematica ma una equivalenza dopo un
cambio di coordinate. Ricordatevi che una traslazione conserva le
differenze
P
xbest x0
Gx, , x dx
best
t
P
Gx, ,0 dx
t
xbest x0
P( x, , xbest )
xbest x0
xbest x0
con
t
xbest x0
Sia per esempio
t 0.32
0.32
G x, ,0dx
P
0.32
Dobbiamo usare la tabella
Quindi
0.32
P
G x, ,0dx 0.251
0.32
Pagina 289 taylor
Quindi:
• Data una misura x0
• Data una distribuzione gaussiana con valor medio xbest e deviazione standard
• Sia t = |x0 – xbest|/ = 0.32
Allora ho una probabilità pari all’area esterna alla gaussiana,
0.32
P 1
G x, ,0dx 1 0.251 74.9%
0.32
cioè il 74.9% di probabilità, di trovare una misura uguale o ‘peggiore’ (cioè più lontana da
xbest) di x0. Quindi ho il 74.9% di probabilità che x0 appartenza alla distribuzione
NOTA IMPORTANTE
Cosa succede se t=1.96 ?
In questo caso, ho solo il 5% di probabilità di avere una misura uguale o peggiore di x0,
quindi x0 è una ‘cattiva’ misura.
0
t
.
P( x,0, )
t
La probabilità di avere una misura uguale o peggiore di x0 si calcola integrando su tutto
l’intervallo esterno a partire dal punto in questione (x0) su entrambi i lati della gaussiana
Esercizio:
Provate a verificare sulle tabelle se è vero che
P
P
xbest x0
Gx, , x dx Gx, ,0dx 0.68
best
xbest x0
xbest x0
2
Gx, , x dx Gx, ,0dx 0.95
best
xbest x0
P
2
xbest x0
2.58
Gx, , x dx G x, ,0dx 0.99
best
xbest x0
P
2.58
xbest x0
0.5
Gx, , x dx Gx, ,0dx 0.39
best
xbest x0
0.5
Nota importante
Nei lucidi precedenti abbiamo definito l’osservabile ‘t’ definita come
t
xbest x0
L’osservabile ‘t’ indica, in questo caso, la distanza della misura x0 dal valor medio in unità di
deviazione standard
Ovviamente il valore dell’osservabile ‘t’ dipende dalla corretta conoscenza di xbest e della
deviazione standard
In una distribuzione Gaussiana, noto il valore dell’osservabile ‘t’ è possibile, in qualsiasi
caso, calcolare la probabilità di avere una misura di valore uguale o maggiore (in modulo) di
x0 attraverso l’uso della proprietà integrale e delle tavole.
Nota:
La deviazione standard nella formula di ‘t’ è quella ‘VERA’ non quella misurata !
Distribuzione Gaussiana
Nell’ipotesi che i dati misurati si distribuiscano seguendo una curva Gaussiana è possibile
dare un carattere predittivo alla deviazione standard
• La prossima misura ha il 68 % di probabilità di cadere all’interno dell’intervallo
x ; x
• La prossima misura ha il 95 % di probabilità di cadere all’interno dell’intervallo
x 2 ; x 2
• La prossima misura ha il 99.7 % di probabilità di cadere all’interno dell’intervallo
x 3 ; x 3
La deviazione standard quindi:
• E’ una quantita associata alla singola misura
• E’ una stima quantitativa della incertezza su una singola misura
• E’ una stima quantitativa della dispersione delle singole misure
• E’ una stima della larghezza della distribuzione di probabilità delle misure
• NON è una stima dell’errore del valor medio ottenuto
• NON è una stima dell’incertezza statistica presente nel nostro valor medio
• NON dipende dal numero di misure effettuate
• Che variabile statistica quantifica l’errore/incertezza presente nel valor medio ?
Deviazione Standard della Media
E possibile Dimostrare che nel caso di dati che si distribuiscono seguendo una distribuzione
Gaussiana l’incertezza a cui è soggetto il valore medio è data dal rapporto della deviazione
standard con la radice quadrata del numero di misure effettuate.
Deviazione standard della media m x
N
Altri nomi della Deviazione Standard della media (SDOM) sono:
• Errore Standard
• Errore Standard della Media
• La Deviazione Standard della media decresce con l’aumentare del numero di misure
Nell’ipotesi di:
• Aver effettuato N misure della medesima quantità (misure ripetute ed indipendenti).
• I dati misurati si distribuiscano seguendo una distribuzione Gaussiana.
• NON siano presenti errori sistematici.
C’e’ il 68% di probabilità che il valore xvero sia all’interno dell’intervallo (xbest – m; xbest + m).
Il valore xbest è estratto atrraverso il processo di media.
Analogamente per il 95% ed il 99.7% di probabilità con 1.96m e 3m
Per comprendere in maniera intuitiva l’origine della deviazione standard della media
• Immaginate di avere un numero infinito di dataset composti ciascuno da N misure di una
osservabile fisica.
• I dati in ciascun dataset si distribuiranno secondo una gaussiana, con un valor medio ed
una deviazione standard
Media
Dev. Std
Media
Dev. Std
Media
Dev. Std
Media
Dev. Std
Media
Dev. Std
• Posso ottenere un numero infinito di valori medi (uno per dataset).
• Costruiamo la distribuzione dei valori medi ottenuti in ciascun dataset.
• Questa distribuzione è una Gaussiana
• Questa distribuzione avrà come valore medio xvero
• Questa distribuzione avrà come deviazione standard la deviazione standard della
media di un singolo dataset
Nota importante
La deviazione dalla media è uno strumento molto utile per valutare il numero di
misure necessarie per ottenere un certo errore. P.es.
Devo misurare una osservabile, una stima a priori mi dice che dovrei ottenere come
valor medio <x> ed una deviazione standard
Se volessi una incertezza nel valore medio pari all’1% quante misure dovrei fare ?
m
x
m
x
1%
1
0.01
N x
1
N
x 0.01
2
Nonostante le proprietà della deviazione standard e della deviazione dalla media siano
dimostrabili solo sotto precise ipotesi si generalizza la loro definizione e uso.
DEFINIZIONI
Deviazione Standard
La deviazione standard è una stima dell’incertezza sulla singola misura, in altre parole è
una valutazione quantitativa delle fluttuazioni casuali e quindi di come si disperdono le
singole misure attorno al valore medio. In particolare, nella gaussiana, esiste il 68% di
probabilità che una singola misura sia all’interno dell’intervallo (xbest – ; xbest + )
Deviazione Standard della Media m
La deviazione standard della media è una stima dell’incertezza sul valor medio, in altre
parole è una valutazione quantitativa di quanto (in assenza di errore sistematico) xbest è
lontano da xvero . In particolare, esiste il 68% di probabilità che xvero sia all’interno
dell’intervallo (xbest – m; xbest + m)
Nota Importante
Voglio conoscere il valore di una osservabile attraverso una operazione di misura.
Ipotizzo che i dati si distribuiscano secondo una gaussiana attorno al valore medio
Effettuo N misure (indipendenti e ripetibili) dell’osservabile.
• Estraggo il valore medio (la migliore stima del valore vero)
• Estraggo la deviazione standard del campione (la migliore stima di )
• Estraggo la deviazione dalla media (la migliore stima del mio errore)
• Estraggo il valore dell’osservabile ‘t’
t
xbest x0
• Posso quindi affermare che ho il 68% (t=1) di probabilità che il valore vero sia nell’intervallo
(xmedio ± m) o il 99.7% (t=3) che il valore vero sia nell’intervallo (xmedio ± 3m)
Tuttavia:
• per estrarre la deviazione dalla media devo usare la deviazione standard, che tuttavia non
conosco ma di cui ho una stima (la deviazione standard del campione) non
necessariamente corretta.
• Come posso stimare l’errore della misura se non conosco il valore vero della deviazione
standard ?
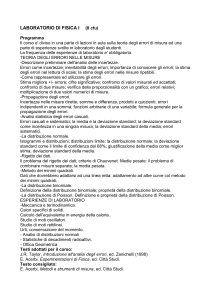
• Se il numero di misure N è ‘piccolo’ posso aspettarmi che il valore della deviazione standard
del campione possa essere molto differente dal valore vero della deviazione
standard
Il grafico riporta l’andamento della deviazione standard al variare del numero di misure nel
caso di un dado equiprobabile. Il valore ‘vero’ è indicato dalla linea gialla.
Osservate che dopo 3-5 tiri la deviazione standard del campione può essere molto
differente dal valore vero della deviazione standard
Per risolvere questo problema bisogna studiare la distribuzione dell’osservabile ‘t’
La distribuzione dell’osservabile ‘t’ è definita “Student’s t distribution” ed data dalla
relazione:
1 Gn 1 / 2 t
1
p(t ,n )
n Gn / 2 n
2
n 1 / 2
Dove G indica una funzione matematica speciale (vedi pg. 196 del Bevington).
Nella formula l’osservabile ‘n’ indica il numero di gradi di libertà (n = N-1 se dal medesimo
set di dati si estrae anche il valor medio) e l’osservabile ‘t’ è data dalla relazione
t
x x0
x
x valor medio estrattodai dati
x deviazione standard estratta dai dati
P((t,n) indica quindi la probabilità di ottenere un determinato t avendo fatto un numero di
misure pari a N
La pagina 266 del Bevington (e la tabella che segue) indicano il valore dell’integrale della
distribuzione della ‘t’ di Student nell’intervallo da x1 = <x> - tx a x2 = <x> + tx fissato il
valore dell’osservabile ‘t’ e del numero di gradi di libertà.
Facciamo un esempio:
• Vengono fatte n (numero piccolo, 2-7) misure e si ottiene un valor medio di 5,88 ed una
deviazione della media di 0,31. Il valore atteso è pari a 6.5
• Nel caso di una distribuzione gaussiana il parametro t assume un valore pari a
t = (6.5-5,88)/0.31 = 2, in altre parole il valor medio misurato dista due deviazioni
standard della media misurate dal valore atteso.
• Se la deviazione standard fosse nota esattamente (e quindi anche la deviazione dalla
media) potremmo dire che esiste il 4.55 % di probabilità che la distanza tra il
valore misurato ed il valore atteso sia dovuto alle fluttuazioni statistiche
• la misura, tuttavia, ha dato solo una stima, non necessariamente precisa, della
deviazione standard
• Questo è il tipico caso in cui è utile la distribuzione della ‘t’ Student
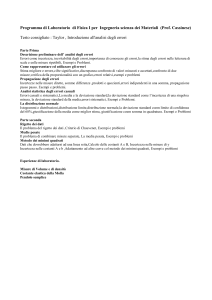
La tabella degli integrali della distribuzione ‘t’ riporta che per t = 2:
Gradi di Liberta
Numero Misure
Probabilità che la differenza dal valor medio sia una
fluttuazione statistica (t=2)
2
3
18.3 %
3
4
13.9 %
4
5
11.6 %
5
6
10.2 %
8
9
8 .0%
10
11
7.3 %
20
21
5.9 %
50
51
5.1 %
infinite
Infinite
4.6 %
Notate che per un numero infinito di misure si ottengono gli stessi risultati della gaussiana
Notate che il risultato dipende dal numero di misure
Notate che la tabella non entra in gioco nel determinare il valore l’errore ma
- la compatibilità o meno di misure tra loro o verso un valore atteso
- l’intervallo di probabilità entro il quale ci aspettiamo di avere il valor medio
La tabella C.8 pg 266
del Bevington
Esercizio:
Uno studente misura l’accelerazione di gravità, g, cinque volte con i seguenti risultati
9.9 m/s2
9.6 m/s2
9.5 m/s2
9.7 m/s2
9.8 m/s2
Trovare il valor medio, la deviazione standard e l’errore sulla misura di g.
Calcolare con che probabilità la differenza tra il valore misurato e quello atteso possa
essere ricondotta ad una fluttuazione statistica usando la proprietà integrale della
gaussiana e la distribuzione della ‘t’ di Student
In questo caso l’osservabile t = (9.806 – 9.70)/0.08 = 1.33
Secondo l’integrale Gaussiano ho una probabilità del (1-0.8165) = 18.4 % che la differenza
tra la misura ed il valore atteso sia una fluttuazione statistica.
Secondo la distribuzione di student la probabilità è di circa 26.7 %
Esercizio
Dopo aver misurato la velocita del suono v molte volte, uno studente conclude che la
deviazione standard v è pari a 10 m/s. Assumendo che tutte le incertezze siano casuali, lo
studente puo’ raggiungere una precisione desiderata facendo un numero sufficiente di
misure e mediando.
Quante misure sono necessarie per avere un errore sulla velocità del suono pari a 3 m/s ?
Quante misure sono necessarie per avere un errore sulla velocità del suono pari a 0.5 m/s ?
m
m
N
3 m / s
N
m
2
m
10 m / s
10
11
3
2
m
N
0.5 m / s
N
m
2
10 m / s
10
400
0.5
2
ESERCIZI
Provate a fare gli esercizi 4.15, 4.16, 4.17
Attenzione
L’errore finale su una qualsiasi quantità non puo essere di molto inferiore alla sensibilità
strumentale. Altrimenti sarebbe possibile raggiungere precisioni NON fisiche semplicemente
ripetendo le misure più e più volte indipendentemente dallo strumento utilizzato.
Esempio:
Vogliamo misurare la lunghezza di un tavolo con un metro a nastro con tacche da 1 mm. La
sensibilità strumentale è di circa 0.5 mm.
• Eseguendo 9 misure otteniamo un valor medio di 178.2 mm con una deviazione
standard di 1.2 mm.
• La deviazione della media è di 0.4 mm dello stesso ordine di grandezza della sensibilità
strumentale.
• Non ha il minimo senso fare più misure, tanto l’errore sul valor medio non potrà
essere ridotto in maniera significativa.
• questo anche se la matematica ci dice che misurando 9000000 volte
potremmo ottenere una precisione di 0.0004 mm (del decimillesimo di
millimetro).
Esempio:
Vogliamo misurare la posizione di una massa appesa ad una molla con un sensore ad
ultrasuoni con la sensibilità di 0.5 millimetri.
A cause di tutte le influenze esterne la massa non è mai ferma ma oscilla leggermente in
tutte le direzioni. Queste oscillazioni casuali rendono ovviamente la misura meno precisa.
• Eseguendo 9 misure otteniamo un valor medio di 67.2 mm con una deviazione
standard di 3.2 mm.
• La deviazione della media in questo caso è di 1.1 mm, valore superiore (più che
doppio) alla sensibilità strumentale.
• In questo caso, potrebbe essere utile arrivare a circa 50 misure. In questo modo la
deviazione dalla media sarebbe 0.45 mm.
• In questo caso l’effetto delle fluttuazioni casuali è dominante rispetto alla sensibilità
strumentale. Effettuare più misure, quindi, giova per aumentare la precisione
della misura.
Livello di confidenza
Abbiamo visto che nel caso di un numero infinito di misure ripetibili ed indipendenti
che si distribuiscano secondo una gaussiana il 68 % dei dati sperimentali deve cadere
all’interno di una deviazione standard.
In altre parole abbiamo un “livello di confidenza” che, eseguendo una misura più volte,
nel 68% dei casi il risultato cadrà entro una deviazione standard.
Spesso, ma non sempre, si sceglie la deviazione standard, un livello di confidenza del
68%, come riferimento.
Ovviamente questo non vale per una distribuzione poissionana o piatta.
Per distribuzioni non gaussiane di fa il viceversa, si dice xo ± xx al 95% C.L.
Questo significa che il 95% delle misure cadono nell’intervallo xo-xx xo+xx
E’ tutto Chiaro ?
Dovreste aver chiari i seguenti argomenti:
• Deviazione standard della media
• Differenza tra la deviazione standard e la deviazione standard dalla media
• Gaussiana
• Distribuzione di ‘t’ di Student
• Errore minimo
• Livello di Confidenza