Università di Siena
Teoria della Stima
Lucidi del corso di
Identificazione e Analisi dei Dati
A.A. 2002-2003
Università di Siena
1
Indice
X Approcci al problema della stima
Stima parametrica
Stima bayesiana
X Proprietà degli stimatori
X Stime a minima varianza
X Stima di massima verosimiglianza
X Problemi di stima parametrica
Stima di Gauss-Markov
Stima ai minimi quadrati
X Stima Bayesiana
Stima a minimo errore quadratico medio
Stima ottima lineare
Identificazione e Analisi dei Dati
Università di Siena
2
Variabili aleatorie scalari
Sia X una variabile aleatoria (v.a.) scalare
X:Ω→R
definita sull’insieme di eventi elementari Ω.
La notazione
X ∼ FX (x), fX (x)
denota che:
• FX (x) è la funzione distribuzione di probabilità di X
FX (x) = P {X ≤ x} ,
∀x ∈ R
• fX (x) è la funzione densità di probabilità di X
Z x
FX (x) =
fX (σ) dσ, ∀x ∈ R
−∞
Identificazione e Analisi dei Dati
Università di Siena
3
Variabili aleatorie vettoriali
Sia X = (X1 , . . . , Xn ) una variabile aleatoria vettoriale
X : Ω → Rn
definita sull’insieme di eventi elementari Ω.
La notazione
X ∼ FX (x), fX (x)
denota che:
• FX (x) è la funzione distribuzione di probabilità congiunta di X
FX (x) = P {X1 ≤ x1 , . . . , Xn ≤ xn } ,
∀x = (x1 , . . . , xn ) ∈ Rn
• fX (x) è la funzione densità di probabilità congiunta di X
Z x1
Z xn
FX (x) =
...
fX (σ1 , . . . , σn ) dσ1 . . . dσn , ∀x ∈ Rn
−∞
−∞
Identificazione e Analisi dei Dati
Università di Siena
4
Momenti di una distribuzione
• primo momento (media)
mX = E[X] =
Z
+∞
x fX (x) dx
−∞
• secondo momento centrato (varianza)
2
σX
= Var(X) = E (X − mX )
2
=
Z
+∞
−∞
(x − mX )2 fX (x) dx
Esempio Si definisce densità normale, e si indica con N(m, σ 2 ), la densità
f(x) = √
1
2πσ
(x − m)2
−
2σ 2
e
in cui m è la media della distribuzione e σ 2 è la varianza.
Identificazione e Analisi dei Dati
Università di Siena
5
Campionamento di una variabile aleatoria
Si considerino n ripetizioni indipendenti dello stesso esperimento casuale.
L’osservazione è dunque costituita da una successione X1 , . . . , Xn di v.a.
indipendenti ed aventi la stessa densità di probabilità f(·).
Definizione 1 Una successione X1 , . . . , Xn di v.a. indipendenti e
identicamente distribuite (i.i.d.) si dice campione di dimensione n di
densità f(·).
Si definisca la v.a. vettoriale X=(X1 , . . . , Xn ). Qual è la densità di
probabilità congiunta di X?
Dato che le v.a. X1 , . . . , Xn sono indipendenti, risulta:
fX (x) =
n
Y
f(xi ),
x = (x1 , . . . , xn )
i=1
Identificazione e Analisi dei Dati
Università di Siena
6
Problema della Stima
Problema. Stimare il valore della variabile incognita θ ∈ Rp sulla base di
un’osservazione y della v.a. Y ∈ Rn .
Due possibili scenari:
a. Stima parametrica
La variabile θ è un parametro incognito, e la densità di probabilità di
Y dipende da θ
b. Stima bayesiana
L’incognita θ è una variabile aleatoria, ed è nota la densità di
probabilità congiunta di Y e θ
Identificazione e Analisi dei Dati
Università di Siena
7
Stima parametrica
• La distribuzione (o la densità) di probabilità della v.a. Y ha una forma
funzionale nota, che dipende da un vettore θ di parametri incerti
Y ∼ FYθ (y), fYθ (y)
• Θ ⊆ Rp denota lo spazio dei parametri, in cui assume valori il vettore
dei parametri θ
• Y ⊆ Rn denota lo spazio delle osservazioni, in cui assume valori la
variabile aleatoria Y
Identificazione e Analisi dei Dati
Università di Siena
8
Problema della stima parametrica
Il problema della stima parametrica consiste nello stimare il parametro
incognito θ sulla base di un’osservazione y della v.a Y .
Definizione 2 Uno stimatore del parametro θ è una funzione
T : Y −→ Θ
Dare uno stimatore T (·) corrisponde a fissare la regola che, se si osserva y,
allora si stima θ con la quantità θ̂ = T (y).
In base alla definizione data, la classe dei possibili stimatori è infinita!
Una prima questione consiste quindi nello stabilire dei criteri per decidere
quali stimatori siano “buoni” e quali no, ovvero per confrontare due
stimatori.
Quale criterio conviene adottare per la scelta di un buon stimatore?
Identificazione e Analisi dei Dati
Università di Siena
9
Stima non polarizzata
Ovviamente, il risultato migliore che uno stimatore può fornire è che la
stima coincida con il valore vero del parametro. Dato che la stima è una
v.a., è allora ragionevole richiedere che ciò accada in media.
Definizione 3 Uno stimatore T (·) del parametro θ si dice corretto (o non
polarizzato) se E θ [T (Y )] = θ, ∀θ ∈ Θ.
corretto
polarizzato
PSfrag replacements
θ
Identificazione e Analisi dei Dati
Università di Siena
10
Esempi
• Y1 , . . . , Yn v.a. i.d. con media m. La media campionaria
n
1X
Yi
Ȳ =
n i=1
è una stima non polarizzata di m. Infatti
n
1X
E[Yi ] = m
E Ȳ =
n i=1
• Y1 , . . . , Yn v.a. i.i.d. con varianza σ 2 . La varianza campionaria
n
1 X
(Yi − Ȳ )2
S =
n − 1 i=1
2
è una stima non polarizzata di σ 2 .
Identificazione e Analisi dei Dati
Università di Siena
11
Stima consistente
Definizione 4 Sia {Yi }∞
i=1 una successione di v.a.. La successione di
stimatori Tn =Tn (Y1 , . . . , Yn ) si dice consistente per θ se Tn converge a θ in
probabilità per ogni θ ∈ Θ, cioè
lim P θ {kTn − θk > ε} = 0
n→∞
,
∀ε > 0
,
∀θ ∈ Θ
n = 500
n = 100
PSfrag replacements
n = 50
n = 20
θ
Identificazione e Analisi dei Dati
Università di Siena
12
Esempio
Y1 , . . . , Yn v.a. i.i.d. con media m e varianza σ 2 . La media campionaria
n
1X
Yi
Ȳ =
n i=1
è uno stimatore consistente di m.
Vale infatti il seguente teorema.
Teorema 1 (Legge dei grandi numeri) Sia {Yi }∞
i=1 una successione di v.a.
indipendenti e identicamente distribuite con media m e varianza finita.
Allora la media campionaria Ȳ converge a m in probabilità.
Osservazione Sappiamo che la media campionaria è una stima non
polarizzata di m. Inoltre, sotto le ipotesi del Teorema 1, risulta
σ2
Var(Ȳ ) =
→0
n
per
n→∞
Identificazione e Analisi dei Dati
Università di Siena
13
Errore quadratico medio
Si consideri uno stimatore T (·) del parametro scalare θ.
Definizione 5 Si definisce errore quadratico medio la quantità
E θ (T (Y ) − θ)2
Se lo stimatore T (·) è corretto, l’errore quadratico medio coincide con la
varianza della stima.
Definizione 6 Dati due stimatori T1 (·) e T2 (·) del parametro θ, T1 (·) si
dice preferibile a T2 (·) se
θ
2
θ
2
, ∀θ ∈ Θ
E (T1 (Y ) − θ) ≤ E (T2 (Y ) − θ)
Restringendo l’attenzione agli stimatori corretti, cerchiamo quello, se
esiste, con minima varianza per ogni valore di θ.
Identificazione e Analisi dei Dati
Università di Siena
14
Stima non polarizzata a minima varianza
Definizione 7 Uno stimatore corretto T ∗ (·) del parametro scalare θ viene
detto efficiente (o UMVUE, uniformly minimum variance unbiased
estimator) se
h
i
2
θ
∗
θ
2
E (T (Y ) − θ) ≤ E (T (Y ) − θ) , ∀θ ∈ Θ
per ogni stimatore corretto T (·) di θ.
UMVUE
PSfrag replacements
θ
Identificazione e Analisi dei Dati
Università di Siena
15
Migliore stima lineare
Restringiamo l’attenzione alla classe degli stimatori lineari, ossia stimatori
del tipo
n
X
ai y i , a i ∈ R
T (y) =
i=1
Definizione 8 Uno stimatore lineare corretto T ∗ (·) del parametro scalare
θ viene detto BLUE (best linear unbiased estimator) se
h
i
2
θ
∗
θ
2
E (T (Y ) − θ) ≤ E (T (Y ) − θ) , ∀θ ∈ Θ
per ogni stimatore lineare corretto T (·) di θ.
Esempio. Yi v.a. indipendenti con media m e varianza σi2 , i = 1, . . . , n.
n
X
1
1
Y
Ŷ = n
2 i
X 1
σ
i=1 i
2
σ
i
i=1
risulta essere la migliore stima lineare non polarizzata di m.
Identificazione e Analisi dei Dati
Università di Siena
16
Limite di Cramer-Rao
Il limite di Cramer-Rao stabilisce un limite inferiore per la varianza di ogni
stimatore corretto del parametro θ.
Teorema 2 Sia T (·) uno stimatore corretto del parametro scalare θ, e si
supponga che lo spazio delle osservazioni Y sia indipendente da θ. Allora
(sotto alcune ipotesi di regolarità...)
θ
2
E (T (Y ) − θ) ≥ [In (θ)]−1
"
2 #
θ
∂ ln fY (Y )
dove In (θ)=E θ
( quantità di informazione di Fisher).
∂θ
Osservazione. La valutazione di In (θ) richiede generalmente la
conoscenza di θ; quindi il valore del limite di Cramer-Rao è tipicamente
sconosciuto all’utente. Esso può comunque essere usato per dimostrare che
uno stimatore non polarizzato è efficiente.
Identificazione e Analisi dei Dati
Università di Siena
17
Limite di Cramer-Rao
Nel caso in cui il parametro θ sia vettoriale, e T (·) ne è uno stimatore
corretto, risulta
E θ (T (Y ) − θ) (T (Y ) − θ)0 ≥ [In (θ)]−1
(1)
dove la disuguaglianza è da intendersi in senso matriciale.
In (θ) denota la matrice di informazione di Fisher
"
0 #
θ
θ
∂ ln fY (Y )
∂ ln fY (Y )
In (θ) = E θ
∂θ
∂θ
La matrice a sinistra nella (1) è la matrice di covarianza dello stimatore.
Identificazione e Analisi dei Dati
Università di Siena
18
Limite di Cramer-Rao
Se le v.a. Y1 , . . . , Yn sono i.i.d., risulta
In (θ) = nI1 (θ)
1
Dunque, per θ fissato, il limite di Cramer-Rao migliora come
n
all’aumentare della dimensione n del campione.
Esempio. Y1 , . . . , Yn v.a. i.i.d. con media m e varianza σ 2 . Risulta
E
h
Ȳ − m
2 i
[I1 (θ)]−1
σ2
−1
≥ [In (θ)] =
=
n
n
dove Ȳ denota la media campionaria. Se le v.a. Y1 , . . . , Yn seguono una
1
densità normale, risulta anche I1 (θ)= 2 .
σ
Essendo dunque raggiunto il limite di Cramer-Rao, nel caso di v.a.
normali i.i.d. la media campionaria è uno stimatore efficiente della media.
Identificazione e Analisi dei Dati
Università di Siena
19
Stima di massima verosimiglianza
Si consideri una v.a. Y ∼fYθ (y), e una sua osservazione y. Si definisce
funzione di verosimiglianza la funzione di θ (y è fissato!)
L(θ|y) = fYθ (y)
Una stima ragionevole di θ è quel valore del parametro che massimizza la
probabilità dell’evento osservato.
Definizione 9 Si definisce stimatore di massima verosimiglianza del
parametro θ lo stimatore
TML (y) = arg max L(θ|y)
θ∈Θ
Osservazione. I punti di massimo delle funzioni L(θ|y) e ln L(θ|y)
coincidono. In alcuni casi può risultare conveniente cercare i punti di
massimo di ln L(θ|y).
Identificazione e Analisi dei Dati
Università di Siena
20
Proprietà della stima di massima verosimiglianza
Si consideri il caso di parametro θ scalare.
Teorema 3 Sotto le ipotesi di validità del limite di Cramer-Rao, se esiste
uno stimatore T ∗ (·) che raggiunge il limite di Cramer-Rao, allora esso
coincide con lo stimatore di massima verosimiglianza TML (·).
Esempio. Yi ∼N(m, σi2 ) indipendenti, σi2 nota, i = 1, . . . , n. La stima
n
X
1
1
Y
Ŷ = n
2 i
X 1
σ
i=1 i
2
σ
i
i=1
n
X 1
1
di m è corretta e tale che Var(Ŷ ) = n
, mentre In (m) =
.
2
X 1
σ
i=1 i
2
σ
i
i=1
Essendo raggiunto il limite di Cramer-Rao, Ŷ risulta lo stimatore di
massima verosimiglianza di m.
Identificazione e Analisi dei Dati
Università di Siena
21
La stima di massima verosimiglianza ha un buon comportamento
asintotico.
Teorema 4 Se le v.a. Y1 , . . . , Yn sono i.i.d., allora (sotto alcune ipotesi di
regolarità...)
p
In (θ) (TML (Y ) − θ) −→ N(0, 1)
in densità di probabilità, asintoticamente per n→∞.
Il Teorema 4 ci dice che la stima di massima verosimiglianza è
• asintoticamente corretta
• consistente
• asintoticamente efficiente
• asintoticamente normale
Identificazione e Analisi dei Dati
Università di Siena
22
Esempio. Sia Y1 , . . . , Yn un campione di densità normale con media m e
varianza σ 2 . La media campionaria
n
1X
Yi
Ȳ =
n i=1
è la stima di massima verosimiglianza di m.
p
n
Inoltre In (m)(Ȳ − m) ∼ N(0, 1), essendo In (m)= 2 .
σ
Osservazione. La stima di massima verosimiglianza può non essere
corretta. Si consideri il caso di un campione Y1 , . . . , Yn di densità normale
con varianza σ 2 . La stima di massima verosimiglianza di σ 2 risulta
n
1X
(Yi − Ȳ )2
Ŝ =
n i=1
2
che è non corretta, in quanto E[Ŝ 2 ] =
n−1 2
σ .
n
Identificazione e Analisi dei Dati
Università di Siena
23
Problemi di stima a massima verosimiglianza
Sia Y ∈ Rm un vettore di v.a., tali che
Y = U (θ) + ε
dove
- θ ∈ Rn è il parametro incognito da stimare
- U (·) : Rn → Rm è una funzione nota
- ε ∈ Rm è un vettore di v.a., su cui si fa l’ipotesi
ε ∼ N (0, Σε )
Problema: determinare la stima a massima verosimiglianza di θ
θ̂ML = TML (Y )
Identificazione e Analisi dei Dati
Università di Siena
24
Stima ai minimi quadrati
La densità di probabilità dei dati Y è pari a
fY (y) = fε (y − U (θ)) = L(θ|y)
Perciò, dalle ipotesi su ε
θ̂ML
=
arg max ln L(θ|y)
=
arg min (y − U (θ))0 Σ−1
ε (y − U (θ))
θ
θ
Se la covarianza Σε è nota, si ottiene la stima ai minimi quadrati pesati
Poichè in generale U (θ) è una funzione non lineare, la soluzione si calcola
tramite metodi numerici:
MATLAB Optimization Toolbox → >> help optim
Identificazione e Analisi dei Dati
Università di Siena
25
Stimatore di Gauss-Markov
Nel caso in cui la funzione U (·) sia lineare, ovvero U (θ) = U θ con
U ∈ Rm×n matrice nota, si ha
Y = Uθ + ε
e la stima ML coincide con la stima di Gauss-Markov
−1 0 −1
U Σε y
θ̂ML = θ̂GM = (U 0 Σ−1
ε U)
Nel caso particolare in cui ε ∼ N (0, σ 2 I) (variabili εi indipendenti!), si ha
la stima ai minimi quadrati
θ̂LS = (U 0 U )−1 U 0 y
Nota: la stima LS non dipende dal valore di σ, ma solo da U
Identificazione e Analisi dei Dati
Università di Siena
26
Esempi di stima ai minimi quadrati
Esempio 1.
Yi = θ + εi , i = 1, . . . , m
εi variabili aleatorie indipendenti, con media nulla e varianza σ 2
⇒ E[Yi ] = θ
Si vuole stimare il valore di θ sulla base di m osservazioni delle Yi
Si ha Y = U θ + ε con U = (1 1 . . . 1)0 e
0
θ̂LS = (U U )
−1
m
1 X
U y =
yi
m i=1
0
La stima ai minimi quadrati coincide con la media aritmetica (ed è anche
la stima a massima verosimiglianza se le εi sono Gaussiane)
Identificazione e Analisi dei Dati
Università di Siena
27
Esempi di stima ai minimi quadrati
Esempio 2.
Stesso problema dell’Esempio 1, con E[ε2i ] = σi2 , i = 1, . . . , m
In questo caso, E[εε0 ] = Σε =
σ12
0
...
0
0
.
.
.
σ22
.
.
.
...
0
.
.
.
0
0
...
..
.
2
σm
⇒ La stima lineare ai minimi quadrati è ancora la media aritmetica
⇒ La stima di Gauss-Markov è
θ̂GM = (U
0
−1 0 −1
Σ−1
U Σε y
ε U)
m
X
1
1
= m
2 yi
X 1
σ
i=1 i
2
σ
i
i=1
e coincide con la stima a massima verosimiglianza se le εi sono Gaussiane
Identificazione e Analisi dei Dati
Università di Siena
28
Stima Bayesiana
Stima parametrica: stimare il valore di un parametro incognito θ sulla
base di osservazioni della variabile aleatoria Y , la cui distribuzione ha una
forma funzionale nota che dipende da θ, fYθ (y)
→ stima a massima verosimiglianza
→ stimatori UMVUE e BLUE
→ stimatori ai minimi quadrati
Stima Bayesiana : stimare una variabile aleatoria incognita X, sulla
base di osservazioni della variabile aleatoria Y , conoscendo la densità di
probabilità congiunta fX,Y (x, y)
⇒ stima ottima a posteriori
⇒ stima a minimo errore quadratico medio
⇒ stima ottima lineare
Identificazione e Analisi dei Dati
Università di Siena
29
Stima Bayesiana: formulazione del problema
Problema:
Data una variabile aleatoria incognita X ∈ Rn e una variabile aleatoria
Y ∈ Rm , della quale sono disponibili osservazioni, determinare una stima
di X basata sui valori osservati di Y .
Soluzione: occorre individuare uno stimatore X̂ = T (Y ), dove
T (·) : Rm → Rn
Per valutare la qualità della stima è necessario definire un opportuno
criterio di stima: in generale, si considera il funzionale di rischio di Bayes
ZZ
d(x, T (y)) fX,Y (x, y) dx dy
Jr = E[d(X, T (Y ))] =
e si minimizza Jr rispetto a tutti i possibili stimatori T (·)
d(X, T (Y )) → “distanza” tra la v.a. incognita X e la sua stima T (Y )
Identificazione e Analisi dei Dati
Università di Siena
30
Stima a minimo errore quadratico medio (MEQM)
Sia d(X, T (Y )) = kX − T (Y )k2 .
Si ottiene cosı̀ la stima a minimo errore quadratico medio (MEQM)
X̂MEQM = T ∗ (Y )
dove
T ∗ (·) = arg min E[kX − T (Y )k2 ]
T (·)
Osservazioni:
- si deve risolvere un problema di minimo rispetto a tutti i possibili
stimatori T (·) : Rm → Rn
- il valore atteso E[·] viene calcolato rispetto a entrambe le variabili
aleatorie X e Y → è necessario conoscere la densità di probabilità
congiunta fX,Y (x, y)
Identificazione e Analisi dei Dati
Università di Siena
31
Stima MEQM
Risultato
X̂MEQM = E[X|Y ]
Il valore atteso condizionato di X rispetto ad Y coincide con la stima a
minimo errore quadratico medio di X basata su osservazioni di Y
Generalizzazioni:
- Sia Q(X, T (Y )) = E[(X − T (Y ))(X − T (Y ))0 ]. Allora:
Q(X, X̂MEQM ) ≤ Q(X, T (Y )), per ogni possibile T (Y )
- X̂MEQM minimizza ogni funzione scalare monotona crescente di
Q(X, T (Y )), e in particolare trace(Q) (MEQM) e trace(W Q) con
W > 0 (MEQM pesato)
Identificazione e Analisi dei Dati
Università di Siena
32
Stima ottima lineare (LMEQM)
La stima MEQM richiede la conoscenza della distribuzione di X e Y
→ Stimatori di struttura più semplice
Stimatori lineari:
T (Y ) = AY + b
A ∈ Rn×m , b ∈ Rn×1 : coefficienti dello stimatore (da determinare)
La stima lineare a minimo errore quadratico medio è definita da
X̂LMEQM = A∗ Y + b∗
dove
A∗ , b∗ = arg min E[kX − AY − bk2 ]
A,b
Identificazione e Analisi dei Dati
Università di Siena
33
Stima LMEQM
Risultato
Siano X e Y variabili aleatorie tali che:
E[X] = mX
E
X − mX
Y − mY
E[Y ] = mY
X − mX
Y − mY
0
=
RX
0
RXY
RXY
RY
Allora
X̂LMEQM = mX + RXY RY−1 (Y − mY )
ovvero
A∗ = RXY RY−1
b∗ = mX − RXY RY−1 mY
Identificazione e Analisi dei Dati
Università di Siena
34
Proprietà della stima LMEQM
• La stima LMEQM non richiede la conoscenza della distribuzione di
probabilità congiunta di X e Y , ma solo delle covarianze RXY , RY
(statistiche del secondo ordine)
• La stima LMEQM soddisfa
E[(X − X̂LMEQM )Y 0 ]
=
=
E[{X − mX − RXY RY−1 (Y − mY )}Y 0 ]
RXY − RXY RY−1 RY = 0
⇒ L’errore di stima ottimo lineare è scorrelato dai dati Y
• Se X e Y sono congiuntamente Gaussiane si ha
E[X|Y ] = mX + RXY RY−1 (Y − mY )
per cui
X̂LMEQM = X̂MEQM
⇒ Nel caso Gaussiano, la stima MEQM è funzione lineare delle
variabili osservate Y , e quindi coincide con la stima LMEQM
Identificazione e Analisi dei Dati
Università di Siena
35
Esempio di stima LMEQM (1/2)
Yi , i = 1, . . . , m, variabili aleatorie definite da
Yi = ui X + ε i
dove
- X variabile aleatoria di media mX e varianza σX2 ;
- ui coefficienti noti;
- εi variabili aleatorie indipendenti, con media nulla e varianza σi2
Si ha
Y = UX + ε
con U = (u1 u2 . . . um )0 e E[εε0 ] = Σε = diag{σi2 }
Si vuole calcolare la stima LMEQM
X̂LMEQM = mX + RXY RY−1 (Y − mY )
Identificazione e Analisi dei Dati
Università di Siena
36
Esempio di stima LMEQM (2/2)
Si ha:
- mY = E[Y ] = U mX
- RXY = E[(X − mX )(Y − U mX )0 ] = σX2 U 0
- RY = E[(Y − U mX )(Y − U mX )0 ] = U σX2 U 0 + Σε
da cui (dopo qualche passaggio...)
1
mX
σX2
1
U 0 Σ−1
ε U +
σX2
U 0 Σ−1
ε Y +
X̂LMEQM =
Caso particolare: U = (1 1 . . . 1)0 (ovvero Yi = X + εi )
X̂LMEQM =
m
X
1
1
Y
+
2 mX
2 i
σ
σX
i=1 i
m
X
1
1
+
σ2
σX2
i=1 i
Nota: l’informazione a priori su X è considerata come un dato aggiuntivo
Identificazione e Analisi dei Dati
Università di Siena
37
Esercizio sulla stima Bayesiana (1/2)
Si considerino due variabili aleatorie X e Y , la cui pdf congiunta è
− 3 x2 + 2xy
0 ≤ x ≤ 1, 1 ≤ y ≤ 2
2
fX,Y (x, y) =
0
altrimenti
Si vogliono determinare le stime X̂MEQM e X̂LMEQM di X, basate su una
osservazione della variabile Y .
Soluzioni:
• X̂MEQM
2
3
y−
8
= 3
1
y−
2
• X̂LMEQM =
73
1
y+
22
132
Vedere file MATLAB: Es bayes.m
Identificazione e Analisi dei Dati
Università di Siena
38
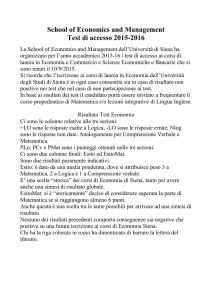
Esercizio sulla stima Bayesiana (2/2)
Joint pdf
0.65
0.64
2.5
0.63
2
0.62
f(x,y)
stime di X
1.5
1
0.61
0.6
0.5
0
2
0.59
1.8
MEQM
LMEQM
E[X]
1
1.6
0.8
0.4
1.2
y
0.58
0.6
1.4
0.2
1
0
fX,Y (x, y)
0.57
x
1
1.1
1.2
1.3
1.4
1.5
y
1.6
1.7
1.8
1.9
2
X̂MEQM (y) (rosso)
X̂LMEQM (y) (verde)
E[X] (blu)
Identificazione e Analisi dei Dati