Università degli studi di Siena
Dipartimento di ingegneria dell’informazione e scienze matematiche
Dispense del corso di
Teoria dei Giochi e Giochi Evolutivi
Parte 1 - Teoria dei Giochi
Dario Madeo, Chiara Mocenni
Marzo 2016
Indice
1 Elementi della teoria dei giochi non cooperativi
1.1
1.2
1.3
1.4
4
Giochi a 2 giocatori con strategie pure . . . . . . . . . . . . . . . . . . . . .
4
1.1.1
Matrici di payoff e best reply . . . . . . . . . . . . . . . . . . . . . .
6
1.1.2
È una questione di ... equilibrio! . . . . . . . . . . . . . . . . . . . . .
7
1.1.3
Giochi con n giocatori . . . . . . . . . . . . . . . . . . . . . . . . . .
10
Strategie miste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
1.2.1
Strategie miste e funzione payoff come valore atteso . . . . . . . . . .
13
1.2.2
Best reply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
Equilibrio di Nash . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
1.3.1
Calcolo degli equilibri di Nash misti: 2 giocatori e 2 strategie . . . . .
15
1.3.2
Calcolo degli equilibri di Nash misti: 2 giocatori e 3 strategie . . . . .
16
Giochi simmetrici a due giocatori . . . . . . . . . . . . . . . . . . . . . . . .
17
1.4.1
Equilibri di Nash simmetrici . . . . . . . . . . . . . . . . . . . . . . .
18
1.4.2
Calcolo degli equilibri di Nash simmetrici . . . . . . . . . . . . . . . .
18
1.4.3
Classificazione dei giochi simmetrici 2 x 2 . . . . . . . . . . . . . . . .
24
1
Introduzione
La teoria dei giochi nasce con lo scopo di individuare il linguaggio matematico appropriato
per la modellizzazione e lo studio dei fenomeni economici. Questa può avere due ruoli diversi, il primo è quello di interpretare la realtà, ossia spiegare come mai, in certe situazioni
di conflitto, i soggetti coinvolti (giocatori) adottano certe strategie piuttosto che altre. Il
secondo ruolo è invece quello di determinare quali situazioni di equilibrio possono verificarsi
come risultato dell’interazione tra i due soggetti. Le interazioni strategiche studiate dalla
teoria dei giochi avvengono fra soggetti intelligenti e razionali. Intelligenti significa essi sono
in grado di capire la situazione in cui si trovano e di effettuare ragionamenti logici complessi. Razionali significa che sanno ordinare i loro obiettivi in un scala di preferenze e che si
comporteranno in modo da ottenere il risultato a loro più gradito, fra quelli ai quali sono in
grado di arrivare. In altri termini la decisione sarà guidata dalla voglia di massimizzare un
certo profitto, relativo ad una certa scala di valori che varia da contesto a contesto.
La teoria dei giochi evolutivi è un’estensione della teoria dei giochi classica, che si ispira
ai meccanismi di selezione ed evoluzione delle specie in un contesto biologico. Tale teoria coinvolge individui appartenenti a vaste popolazioni, che non necessariamente hanno una
conoscenza dell’intera struttura del gioco, o l’abilità di effettuare complicati processi razionali.La teoria dei giochi evolutivi è stata introdotta come uno strumento per studiare i processi
di selezione dei geni ed anche i comportamenti nei sistemi biologici e sociali. Il suo scopo è
quello di caratterizzare da un punto di vista dinamico le scelte, in termini di strategie, degli
individui di una popolazione coinvolta in un gioco. Il presupposto fondamentale della teoria
evolutiva è che la capacità fisica di un individuo di riprodursi corrisponde al payoff ottenuto.
Di conseguenza, le strategie di maggior successo, in termini di payoff, sono anche quelle che
si moltiplicano velocemente e alla fine possono diventare dominanti dopo alcune generazioni.
Queste idee trovano un’espressione analitica nella forma della cosiddetta replicator equation.
La teoria dei giochi evolutiva studia i processi di selezione dei geni, delle specie in ambito ecologico, dei comportamenti nei sistemi biologici e sociali tramite la formalizzazione di
modelli matematici. Questo tipo di modelli spiega solo le dinamiche aggregate, non i comportamenti individuali. Infatti, l’ipotesi di base è che le strategie che hanno più successo
vengono adottate con più frequenza; ciò può essere dovuto a dinamiche di apprendimento
sociale, oppure a vere e proprie dinamiche di evoluzione biologica, in cui il comportamento è
geneticamente determinato e gli individui portatori di geni di successo producono una prole
2
più numerosa, on grado di replicare il comportamento dei genitori. I primi modelli di giochi
evolutivi hanno infatti avuto origine in ambito biologico e si proponevano di analizzare la
distribuzione di certe caratteristiche di specie biologiche animali o vegetali non facilmente
spiegabili, come effetti dell’adattamento della specie all’ambiente esterno. La teoria dei giochi evolutiva è stata usata per modellizare sistemi predatore preda, la diffusione del virus
dell’HIV e la riproduzione delle cellule tumorali.
In alcune ricerche più recenti la teoria dei giochi evolutivi è stata estesa a sistemi costituiti
da un numero finito di individui connessi tra di loro da una rete sociale. In questi studi la
replicator equation su rete viene utilizzata come un modello che consente di spiegare quanto
e come le interazioni tra individui possono modificare l’opinione personale, quest’ultima vista
come l’unica fonte decisionale per la scelta di una strategia.
3
Capitolo 1
Elementi della teoria dei giochi non
cooperativi
1.1
Giochi a 2 giocatori con strategie pure
In molti contesti reali, un soggetto si trova nella situazione di dover prendere una decisione,
scegliendo fra varie opzioni possibili. In generale, la scelta cade su quell’opzione che permette
di ottenere il miglior esito in base ad una scala di preferenze (in alcuni casi, si sceglie il meno
peggio!). In altri termini, la decisione sarà guidata dalla voglia di massimizzare un certo
profitto, relativo ad una certa scala di valori che varia da contesto a contesto.
Si supponga di avere a disposizione n scelte numerate per affrontare una certa situazione.
Per indicare in maniera formale la scelta, si utilizza un vettore x di n componenti (x ∈ Rn ).
In particolare la componente i-esima xi sarà l’unica pari ad 1 se si è deciso di adottare la
strategia indicata con il numero i. Un vettore siffatto determina univocamente la scelta
strategica che è stata adottata. In altri termini:
xi =
1 se la strategia adottata è la i
0 se la strategia adottata non è la i
(1.1)
Si può pensare al profitto, normalmente chiamato payoff, come ad una funzione π(x) :
Rn −→ R che associa ad ogni vettore di scelta x un numero reale che quantifica il profitto
che il soggetto trae dall’utilizzare la strategia scelta.
In generale però le scelte sono condizionate da altri fattori. Non è raro trovarsi in contesti
4
in cui il guadagno che si ottiene non dipende esclusivamente dalle proprie decisioni; vi possono essere ulteriori soggetti che partecipano nel processo di scelta, i quali hanno le stesse
intenzioni: massimizzare il proprio profitto. In questi casi, succede spesso che il guadagno
che si può ottenere non dipenderà solo dalle proprie scelte, ma anche da quelle altrui (e
viceversa). Se fosse possibile comunicare con gli altri partecipanti, si potrebbe in qualche
maniera trovare un accordo. In tal caso la scelta potrebbe essere guidata da un semplice
compromesso tra le parti in gioco. Tuttavia il caso più interessante si ha nel momento in cui
le scelte dei vari partecipanti sono fra loro indipendenti e guidate solo dalla voglia di ogni
soggetto di massimizzare il proprio guadagno.
L’interazione appena descritta viene detta gioco, ed i soggetti che vi partecipano sono i
giocatori. Nel caso più semplice, il gioco si sviluppa tra due soggetti. Usando la definizione
presentata in precedenza, si indichi con x ∈ Rn come il vettore che identifica la scelta del
primo soggetto su un pool di n strategie, cosı̀ si indicherà con y ∈ Rm la scelta del secondo
partecipante, il quale ha a disposizione m opzioni. I payoff sono dunque rappresentati da
due funzioni, una per ogni soggetto:
π1 (x, y) : Rn × Rm −→ R payoff giocatore 1
π2 (x, y) : Rn × Rm −→ R payoff giocatore 2
L’obiettivo dei giocatori ora diventa quello di massimizzare il proprio payoff, ma tenendo conto di ciò che farà l’avversario. Il meccanismo di decisione si sviluppa a busta chiusa; le scelte
di entrambi sono rese note contemporaneamente, dunque non vi è spazio per tentennamenti,
escamotage o simili. È analogo al funzionamento di una asta per appalti pubblici: si scrive la propria scelta in una busta chiusa e tutte le buste vengono aperte contemporaneamente.
La teoria dei giochi, di cui si parlerà nel seguito, è una branca della matematica che ci
permette di effettuare delle scelte razionali. La razionalità di cui si parla è qualcosa di
astratto, probabilmente diverso rispetto a quella prettamente umana; essa viene definita in
base a determinati assiomi matematici, che, al solito, cercano nel miglior modo possibile di
fornire un modello abbastanza potente e allo stesso tempo semplice da poter descrivere e
gestire situazioni reali.
La teoria dei giochi è uno strumento che ci aiuta a prendere decisioni. Essa è abbastanza
robusta e si avvantaggia di svariati risultati e teoremi. Tali risultati si basano sul fatto che
sono note tutte le funzioni di payoff; tutti i risultati della teoria infatti, si basano, oltre
che sulla razionalità dei giocatori, anche sul fatto che si conoscono già i payoff. In realtà
costruire le funzioni di payoff è spesso un lavoro arduo; è quasi come chiedere di quantificare
la felicità che trae una persona dal fare una certa cosa! In questi casi ci vengono in aiuto altri
5
strumenti, come ad esempio la stima del costo dell’informazione. Si assumerà comunque che
i payoff siano ben determinati tramite qualche metodo e la teoria dei giochi subentrerà per
dare delle risposte di tipo esecutivo, basate su tale informazione a priori.
1.1.1
Matrici di payoff e best reply
Dovrebbe essere chiaro fino a questo punto che il payoff del giocatore 1, cosı̀ come quello del
giocatore 2, sono determinati dalla coppia di strategie (i, j), dove i è la strategia adottata
dal giocatore 1 e j quella adoperata dal giocatore 2. Si indica con aij il payoff che il giocatore
1 ottiene se egli usa la strategia i mentre il suo avversario la strategia j. Con bij si indica il
payoff del secondo giocatore: ancora, bij è il guadagno che ottiene quando lui sceglie j e il
primo giocatore sceglie i.
Segue in maniera naturale dalla descrizione precedente, che sono state implicitamente definite
due matrici di payoff A, B ∈ Rn×m , tali che A = {aij } e B = {bij }. Mediante tali matrici,
si caratterizzano le funzioni di payoff:
π1 (x, y) = xT Ay
π2 (x, y) = xT By
Infatti, nel momento in cui x ed y sono vettori costruiti come descritto in precedenza, allora
xT Ay e xT By selezionano gli elementi aij della matrice A e bij della matrice B, posto che xi
ed yj siano le uniche componenti di x e di y pari ad 1.
Nell’ambito della teoria dei giochi, vengono introdotte le best reply (lett. miglior risposta).
Queste sono delle particolari funzioni che ci aiutano nel processo decisionale. La best reply
del giocatore 1 associa ad ogni scelta strategica del giocatore 2 l’insieme delle strategie che il
giocatore 1 deve adottare se vuole massimizzare il suo payoff. Si indicano con β1 (j) e β2 (i)
le best reply dei giocatori. Ecco un esempio:
1 3 0
β1 (1) = {3}
β1 (2) = {3}
A = 2 0 4 =⇒
β1 (3) = {2}
5 9 3
In pratica, considerando che le colonne indicano le strategie del giocatore 2, si fissa la colonna
relativa alla strategia j; si cerca in tale colonna l’elemento massimo. La best reply sarà
dunque la strategia i (riga) al quale corrisponde l’elemento massimo. Un altro esempio:
6
3 6 2
β1 (1) = {3}
β1 (2) = {1, 2}
A = 3 6 1 =⇒
5 1 0
β1 (3) = {1}
In questo caso succede che, se il giocatore 2 adotta la strategia j = 2, allora il giocatore 1
è indifferente nell’utilizzare le strategie i = 1 ed i = 2, in quanto gli garantiscono lo stesso
payoff. La costruzione della best reply function del giocatore 2 è del tutto analoga a quella
appena descritta, salvo scambiare i ruoli alle righe (strategie del giocatore 1) con le colonne
(strategie del giocatore 2).
1.1.2
È una questione di ... equilibrio!
Si consideri il seguente gioco:
3 6 20
β1 (1) = {3}
β1 (2) = {1, 2}
A = 3 6 1 =⇒
5 1 0
β1 (3) = {1}
4 8 2
β2 (1) = {2}
β2 (2) = {3}
B = 1 1 10 =⇒
3 5 5
β2 (3) = {2, 3}
Il giocatore 1 potrebbe voler adottare come strategia i = 1, nella speranza che il giocatore
2 scelga j = 3. In tal caso, il giocatore 1 guadagnerebbe il payoff più alto (20). Ma se
il giocatore 2 scegliesse j = 3, otterrebbe un payoff pari a 2. Il giocatore 2 dal canto suo
sarebbe molto propenso ad ottenere il payoff 10 e può raggiungere tale obiettivo scegliendo
j = 3 e sperando che l’avversario scelga i = 2; ma in questo modo il giocatore 1 otterrebbe
un modesto payoff pari ad 1.
Lo scenario delineato conduce ad un circolo vizioso, mosso essenzialmente dall’egoismo di
entrambi i giocatori. Agendo come descritto in precedenza, essi potrebbero prendere una
decisione che poi potrebbe quasi certamente non rispecchiare le aspettative. L’idea per
uscirne fuori è quella di giungere ad un compromesso, ovvero effettuare una scelta strategica
che va bene ad entrambi i giocatori. Bisogna cioè raggiungere una situazione di equilibrio
tra le parti. In termini matematici, si può definire un equilibrio alla seguente maniera:
∗
∗
(i , j ) è un equilibrio ⇐⇒
7
i∗ ∈ β1 (j ∗ )
j ∗ ∈ β2 (i∗ )
(1.2)
Tale nozione è stata formalizzata dal premio Nobel J.F.Nash da cui il nome equilibri di
Nash. Osservando le best reply function riportate in precedenza, si ottiene che (i∗ , j ∗ ) =
(1, 2). Infatti
i∗ = 1 ∈ β1 (j ∗ = 2) = {1, 2}
e
j ∗ = 2 ∈ β2 (i∗ = 1) = {2}.
Se il giocatore 2 fosse a conoscenza del fatto che l’avversario sceglie i = 1, allora sicuramente
sceglierebbe j = 2; questa mossa gli garantirebbe il massimo payoff raggiungibile in relazione
al fatto che i = 1. Il giocatore 1 similmente, venendo a conoscenza del fatto che il giocatore
2 giocherà j = 2, si troverà nella situazione di dover scegliere tra i = 1 ed i = 2, nel qual caso
riuscirà comunque a massimizzare il suo payoff. Se ai giocatori venisse data la possibilità di
cambiare la propria strategia una volta scelti i = 1 e j = 2, essi non ne avrebbero motivo.
Per questo si parla di equilibrio.
L’equilibrio di Nash trovato in particolare è non stretto, a causa del fatto che il giocatore 1
ha due opzioni per massimizzare il suo payoff rispetto alla scelta j = 2. Nei casi in cui questa
ambiguità non si presenta, si parlerà invece di equilibri stretti. Non è però in generale
garantito che, dato un certo gioco, esista un solo equilibrio di Nash. Si possono presentare
delle situazioni in cui gli equilibri sono più di uno, o addirittura nessuno!
Si possono trovare gli equilibri di Nash (qualora esistono!) utilizzando uno schema a bimatrice. Si supponga di avere un gioco definito dalle seguenti matrici di payoff:
A=
5 1
1 2
,B =
2 1
7 3
Si costruisce a partire dalle matrici A e B la seguente bimatrice:
gioc. 2
strat. 1
strat. 1
(5, 2)
strat. 2
(1, 1)
strat. 2
(1, 7)
(2, 3)
gioc. 1
La lettura della bimatrice è semplice: ad esempio la coppia (1, 7) indica il payoff che ottengono i giocatori se il primo usa la strategia 2 ed il secondo la strategia 1; chiaramente 1 è
il payoff che ottiene il primo giocatore, 7 è il payoff per il secondo. Si può a questo punto
provare a valutare se esistono equilibri di Nash facendo le seguenti considerazioni:
8
• se il giocatore 1 adotta la strategia 1, l’avversario preferisce scegliere la strategia 1; per
questo, si disegnano delle frecce che partono da tutti gli elementi della riga indicata
dalla strategia 1, verso la strategia (1, 1);
• se il giocatore 1 utilizza la strategia 2, l’avversario sceglie la strategia 1; si mandano
quindi delle frecce che partono da tutti gli elementi della riga indicata dalla strategia
2, verso la strategia (2, 1);
• se il giocatore 2 sceglie la strategia 1, l’avversario usa la strategia 1; di nuovo, si
tracciano delle frecce che partono da tutti gli elementi della colonna indicata dalla
strategia 2, verso la strategia (1, 1);
• infine, se il giocatore 2 adotta la strategia 2, l’avversario preferisce scegliere la strategia
2; si disegnano delle frecce che partono da tutti gli elementi della colonna indicata dalla
strategia 2, verso la strategia (2, 2).
Si ottiene dunque la seguente situazione:
gioc. 2
strat. 1
gioc. 1
strat. 2
strat. 1
(5, 2)
↑
(1, 7)
←
←
strat. 2
(1, 1)
↓
(2, 3)
Nel momento in cui si ottiene una certa strategia che possiede solo frecce entranti, allora
quella rappresenta un equilibrio di Nash stretto. In particolare il numero di frecce entranti
è pari al massimo che è 2 nel caso specifico di giochi con 2 partecipanti. Nel caso particolare
si ha che la strategia (1, 1) è un equilibrio di Nash stretto. Ecco un altro esempio:
gioc. 2
strat. 1
gioc. 1
strat. 2
strat. 1
(4, 20)
l
(4, 7)
←
→
strat. 2
(3, 15)
↑
(2, 13)
La doppia freccia sta indicare il fatto che il giocatore 1 è indifferente a scegliere la sua
strategia se l’avversario sceglie la strategia 1 (otterrà in ogni caso lo stesso payoff). Si vede
che la coppia di strategie (1, 1) è un equilibrio poichè ha 2 frecce entranti, ma in questo caso
non è stretto, infatti ne ha anche una uscente.
9
gioc. 2
strat. 1
gioc. 1
strat. 2
strat. 1
(−3, 5)
↓
(3, 7)
←
→
strat. 2
(3, −1)
↑
(2, 12)
In quest’ultimo caso, non sono presenti coppie di strategie che hanno 2 frecce entranti; si
conclude dicendo che non si hanno equilibri di Nash.
1.1.3
Giochi con n giocatori
Definiamo I = {1, 2, ...n} l’insieme dei giocatori, dove n è un intero positivo e con Si =
{1, 2, ...mi } l’insieme di strategie pure per ogni giocatore i ∈ I, con mi ≥ 2. Il giocatore i è
caratterizzato da un vettore xi ∈ Rmi tale che:
xij =
1 se la strategia adottata dal giocatore i è la j
.
0 se la strategia adottata dal giocatore i non è la la j
(1.3)
L’insieme dei vettori {x1 , x2 , . . . , xn } viene detto profilo di strategie.
Per ogni profilo di strategie ed ogni giocatore i ∈ I, sia πi (x1 , x2 , . . . , xn ) ∈ R il payoff
associato al giocatore i. In teoria dei giochi, il payoff per un giocatore è una funzione che
esprime la valutazione del suo risultato ottenuto, a seguito delle scelte operate da tutti i
giocatori coinvolti. Come già visto nelle sezioni precedenti, nel caso particolare di un gioco a
due giocatori le funzioni payoff, π1 (x1 , x2 ) e π2 (x1 , x2 ), vengono rappresentate da due matrici
A e B del tipo Rm1 ×m2 ; notare inoltre che in questo caso sono stati usati x1 al posto di x, e
x2 anzichè y.
1.2
Strategie miste
Una strategia mista per il giocatore i è una distribuzione di probabilità sull’insieme delle sue
mi strategie pure. Formalmente:
xij = Probabilità con cui il giocatore i userà la strategia j
10
(1.4)
Alla luce di questa definizione possiamo interpretare una strategia pura come un caso particolare di una strategia mista. Dire che “il giocatore i usa la strategia pura j” equivale a
dire che “il giocatore i usa la strategia j con il 100% di probabilità”.
Esempio 1.2.1 Un esempio di strategia mista è il seguente:
0.4
0.1
xi =
0 ,
0.5
(1.5)
dove il giocatore i ha a disposizione mi = 4 strategie. In questo caso, il giocatore i userà
la strategia 1 con probabilità del 40% (0.4), la strategia 2 con probabilità del 10% (0.1),
la strategia 3 con probabilità dello 0% (0), ed infine la strategia 4 con probabilità del 50%
(0.5).
Poichè xij (per j = 1, 2, ..., mi ) rappresentano delle probabilità, allora esse sono non negative
e la loro somma è uguale a uno. In virtù di queste proprietà, si dice che il vettore xi ∈ Rmi
appartiene al simplesso ∆i nell’mi -spazio, definito come:
)
(
mi
X
i
xij = 1 .
(1.6)
∆i = xi ∈ Rm
+ :
j=1
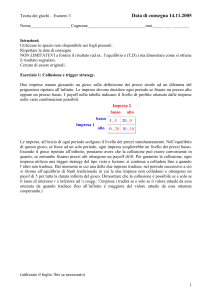
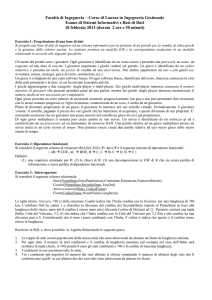
La figura 1.1 rappresenta geometricamente il simplesso nel caso m = 3.
Il simplesso ∆i del giocatore i ha dimensione mi − 1. I vertici di ∆i sono i versori nell’mi i
spazio, identificati da e1i = (1, 0, ..., 0), e2i = (0, 1, ..., 0), fino a em
i = (0, 0, ..., 1). Ogni vertice
j
ei rappresenta la strategia mista del giocatore i che assegna probabilità 1 all’j-esima strategia
pura. Se il giocatore i usa la strategia pura j, allora xi = eji . Il simplesso di strategie miste
∆i è un involucro convesso dei vertici, ed ogni xi ∈ ∆i è una combinazione convessa dei
versori, o strategie pure eji :
mi
X
(1.7)
xi =
xij eji .
j=1
Il sottoinsieme interno di ∆i è definito come:
int(∆i ) = {xi ∈ ∆i : xij > 0
∀j}
(1.8)
Le strategie miste di questo sottoinsieme vengono chiamate interne o completamente miste,
ed assegnano probabilità positive a tutte le strategie pure dei giocatori. L’insieme delle
strategie non interne in ∆i viene chiamato frontiera (o bordo) di ∆i , definito come:
bd(∆i ) = {xi ∈ ∆i : xi ∈
/ int(∆i )}
11
(1.9)
Figura 1.1: Il simplesso ∆i con m = 3.
La frontiera di ∆i è l’insieme di strategie xi per le quali almeno una strategia j viene giocata
con probabilità nulla, ovvero ∃j ∈ {1, . . . , mi } : xij = 0.
Un profilo di strategie miste X = {x1 , x2 , ..., xn } è un punto dello spazio delle strategie miste
del gioco:
Θ = ×i∈I ∆i .
(1.10)
Essendo Θ il prodotto di n unità semplici ∆i , dove ognuna di esse è un insieme (mi − 1)12
dimensionale per ogni giocatore i ∈ I, l’insieme è un poliedro (m − n)-dimensionale in Rm ,
con m = m1 + m2 + ... + mn il numero totale di strategie pure nel gioco. Un profilo di
strategie X è detto interno se ogni componente xi è interna. Il sottoinsieme di tali profili è
definito come:
int(Θ) = ×i∈I int(∆i ).
(1.11)
Similmente, il contorno di Θ, bd(Θ), è l’insieme dei profili non interni x ∈ Θ.
1.2.1
Strategie miste e funzione payoff come valore atteso
L’introduzione del concetto di strategie miste implica una rivisitazione del concetto di payoff.
Infatti, poichè le strategie miste sono distribuzioni di probabilià, allora anche il payoff è il
valore atteso dei payoff che si possono guadagnare utilizzando solo strategie pure. Tale
risultato vale per qualunque gioco con n giocatori.
Nel seguito, viene proposta una dimostrazione della precedente affermazione, utilizzando il
caso semplice dei giochi con 2 giocatori. Sia A ∈ Rm1 ×m2 la matrice di payoff del giocatore
1. Si supponga che il giocatore 1 decida di utilizzare la strategia pura i, mentre il giocatore
2 gioca una strategia mista x2 . In media, il giocatore 1 guadagnerà la seguente quantità:
u1i =
m2
X
aij x2j ,
j=1
ovvero la somma dei payoff ai,j pesati dalle probabilità x2j . Si supponga ora che anche il
giocatore 1 utilizzi una strategia mista x1 . In media, il giocatore 1 guadagnerà:
m1
X
x1i u1i =
i=1
m1 X
m2
X
x1i aij x2j ,
i=1 j=1
ovvero la somma dei payoff medi u1i pesati dalle probabilità x1i . La doppia sommatoria
suggerisce che la precedente equazione possa essere riscritta in forma matriciale, vale a dire:
m1 X
m2
X
x1i aij x2j = xT1 Ax2 .
i=1 j=1
13
Ma la precedente equazione corrisponde alla definizione di payoff che era stata introdotta
parlando di strategie pure, ovvero:
π1 (x1 , x2 ) = xT1 Ax2 .
(1.12)
In maniera del tutto simile, si può lavorare sul payoff del secondo giocatore, utilizzando la
matrice di payoff B, ovvero:
π2 (x1 , x2 ) = xT1 Bx2 .
1.2.2
(1.13)
Best reply
Per analizzare il concetto di best reply, indichiamo con X−i le strategie che fanno parte del
profilo X eccetto xi , e con πi (xi , X−i ) il payoff del giocatore i.
Una strategia mista xi ∈ ∆i sarà una best reply per il giocatore i se esso non ha a disposizione
nessun’altra strategia che gli dia un payoff maggiore rispetto ad X. Questo ci permette di
definire la corrispondenza best reply per strategie pure βi : Θ → ∆i che assegna ad ogni
X ∈ Θ l’insieme non vuoto di best reply per il giocatore i cosı̀ definito:
βi (X) = {xi ∈ ∆i : πi (xi , X−i ) ≥ πi (zi , X−i ) ∀zi ∈ ∆i }
In altri termini, una strategia xi ∈ βi (X) è la miglior risposta possibile alle strategie X−i
adottate dagli avversari.
1.3
Equilibrio di Nash
Uno dei concetti cardine della teoria dei giochi è quello di equilibrio di Nash. L’idea intuitiva
è quella di giungere ad un compromesso tra le parti, ovvero una scelta strategica che vada
bene a tutti i giocatori, ottenendo cosı̀ un equilibrio. In teoria dei giochi si definisce equilibrio
di Nash un profilo di strategie rispetto al quale nessun giocatore ha interesse ad essere l’unico
a cambiare.
Definendo il concetto di equilibrio di Nash in termini di best reply, avremo che un profilo di
strategie X ∈ Θ è un equilibrio di Nash se
xi ∈ βi (X) ∀i.
14
In altri termini, se ogni strategia del profilo X è best reply per ogni giocatore, allora X è un
equilibrio di Nash.
Un equilibrio di Nash X ∈ Θ è stretto se ogni componente xi è l’unica best reply per X, cioè
se βi (X) = {xi } ∀i. Ogni equilibrio stretto in un profilo di strategie è un vertice del poliedro
Θ.
Sia ΘN E l’insieme di tutti gli equilibri di Nash di un gioco. Vale il seguente teorema (Nash,
1950):
Teorema 1.3.1 Per ogni gioco, ΘN E 6= ∅.
Tale teorema ci garantisce che, nello spazio delle strategie miste, ogni gioco ammette sempre
almeno un equilibrio di Nash. È dunque possibile avere giochi che non possiedono equilibri
di Nash puri, ma hanno equilibri di Nash misti (ad esempio, la morra cinese).
1.3.1
Calcolo degli equilibri di Nash misti: 2 giocatori e 2 strategie
Consideriamo i giochi a due giocatori e due strategie. I payoff dei 2 giocatori sono rappresentati dalle seguenti matrici:
A=
a1 b 1
c1 d 1
,
B=
a2 c 2
b2 d 2
.
e la relativa bimatrice è:
G2
s1
s1 (a1 , a2 )
s2
(b1 , c2 )
s2
(d1 , d2 )
G1
(c1 , b2 )
Si considerino le funzioni di payoff ottenute con le matrici A e B, ed usando come vettori
x = [x1 1 − x1 ]T ed y = [y1 1 − y1 ]T :
π1 (x, y) = x1 [(a1 − c1 + d1 − b1 )y1 + b1 − d1 ] + (c1 − d1 )y1 + d1
(1.14)
π2 (x, y) = y1 [(a2 − c2 + d2 − b2 )x1 + b2 − d2 ] + (c2 − d2 )x1 + d2
15
Calcolando le derivate
∂π1
∂x1
x∗1 =
e
∂π2
∂y1
e ponendole uguali a 0, si ottengono le seguenti soluzioni:
(a2 − c2 )
(d2 − b2 )
, x∗2 =
(d2 − b2 ) + (a2 − c2 )
(d2 − b2 ) + (a2 − c2 )
(1.15)
(d1 − b1 )
(a1 − c1 )
y1∗ =
, y2∗ =
(d1 − b1 ) + (a1 − c1 )
(d1 − b1 ) + (a1 − c1 )
Tali soluzioni sono valide se appartengono al simplesso ∆ di dimensione 2 e rappresentano l’eventuale equilibrio misto del gioco. Gli equilibri puri invece possono essere ricavati
utilizzando il metodo della bimatrice.
1.3.2
Calcolo degli equilibri di Nash misti: 2 giocatori e 3 strategie
Di seguito viene riportato a titolo di esempio il calcolo dell’equilibrio di Nash misto della
morra cinese. Si noti che la morra cinese non ha equilibri puri, e quindi per il teorema di
Nash deve esserci per forza almeno un equilibrio misto. Le matrici di payoff del gioco sono
le seguenti:
0 −1 1
0 −1
A = BT = 1
−1 1
0
Si costruiscano i vettori x ed y come spiegato in precedenza:
y1
x1
, y =
x2
y2
x=
1 − y1 − y2
1 − x1 − x2
Le funzioni di payoff diventano:
π1 (x, y) = xT Ay = (−3y2 + 1)x1 + (3y1 − 1)x2 − y1 + y2
π2 (x, y) = xT By = (−3x2 + 1)y1 + (3x1 − 1)y2 − x1 + x2
Si passa quindi al calcolo delle derivate:
16
∂π1
= −3y2 + 1
∂x1
∂π1
= 3y1 − 1
∂x2
,
∂π2
= −3x2 + 1
∂y1
∂π2
= 3x1 − 1
∂y2
Infine si pongono le derivate pari a 0:
∂π1
∂x1
∂π1
∂x2
∂π2
∂y1
∂π2
∂y2
1.4
1
∗
=
y
1
3
= −3y2 + 1 = 0
1
=⇒
y2∗ =
3
= 3y1 − 1 = 0
y3∗ = 1 − y1∗ − y2∗ = 1
3
1
x∗1 =
3
= −3x2 + 1 = 0
1
=⇒
x∗2 =
3
= 3x1 − 1 = 0
x∗3 = 1 − x∗1 − x∗2 = 1
3
Giochi simmetrici a due giocatori
In questo paragrafo analizzeremo i giochi simmetrici a due giocatori, base fondamentale per
la teoria dei giochi evolutiva. Un gioco è simmetrico quando i due giocatori hanno lo stesso
guadagno in condizioni analoghe.
Un gioco simmetrico coinvolge dunque due giocatori con lo stesso numero di strategie e la
funzione payoff di ogni strategia è indipendente dalla postazione del giocatore dalla quale
viene giocata. Richiedere l’equivalenza delle funzioni payoff delle strategie pure è equivalente
a richiedere che la matrice dei payoff del secondo giocatore sia la trasposta della matrice dei
payoff del primo, ovvero: B = AT . In questo caso, introducendo la funzione di payoff
π(x, y) = xT Ay, si ha che:
π1 (x, y) = π(x, y)
17
π2 (x, y) = xT By = y T B T x = y T Ax = π(y, x).
Con K = {1, 2, ..., k} indicheremo l’insieme di strategie pure, dove k è il numero di strategie
pure per ognuno dei due giocatori. Le strategie miste del primo e del secondo
P giocatore
k
: i∈K xi = 1},
saranno indicate rispettivamente da x ∈ ∆ e y ∈ ∆, dove ∆ = {x ∈ R+
mentre Θ = ∆2 . L’insieme di best reply è rispetto ad una strategia z ∈ ∆ è lo stesso per
entrambi i giocatori ed è rappresentato da β(z):
β(z) = {x ∈ ∆ : π(x, z) ≥ π(y, z) ∀y ∈ ∆}.
1.4.1
(1.16)
Equilibri di Nash simmetrici
Nel contesto dei giochi simmetrici una coppia di strategie (x, y) ∈ Θ = ∆2 costituisce un
equilibrio di Nash, (x, y) ∈ ΘN E , se e solo se x ∈ β(y) e y ∈ β(x). Se x = y, l’equilibrio
(x, y) si dice è simmetrico. Il sottoinsieme di strategie x ∈ ∆ che sono in equilibrio con se
stesse è:
∆N E = {x ∈ ∆ : (x, x) ∈ ΘN E }
(1.17)
Non è detto che gli equilibri di Nash di un gioco simmetrico siano simmetrici, ma ogni gioco
simmetrico ha almeno un equilibrio di Nash simmetrico.
Teorema 1.4.1 Per ogni gioco simmetrico finito a due giocatori, ∆N E 6= ∅.
1.4.2
Calcolo degli equilibri di Nash simmetrici
Abbiamo visto che se x ∈ ∆N E (x è un equilibrio di Nash simmetrico), allora x ∈ β(x). In
altri termini:
π(x, x) ≥ π(y, x) ∀y ∈ ∆,
ovvero
xT Ax ≥ y T Ax ∀y ∈ ∆.
È possibile riscrivere la precedente equazione usando le sommatorie:
k
X
i=1
xi [Ax]i ≥
k
X
yi [Ax]i ∀y ∈ ∆,
i=1
dove [Ax]i indica l’i-esima componente del vettore Ax.
18
(1.18)
Valgono i seguenti risultati.
Teorema 1.4.2 Sia x una strategia pura (x = eh ). Se [Ax]h ≥ [Ax]i ∀i 6= h, allora x ∈
∆N E .
Dim. Sia M = [Ax]h . Si ha che:
k
X
xi [Ax]i = xh [Ax]h = M,
i=1
e
k
X
yi [Ax]i = yh [Ax]h +
i=1
k
X
yi [Ax]i = yh M +
i=1,i6=h
k
X
i=1,i6=h
Poichè M ≥ [Ax]i ∀i 6= h, allora:
k
X
k
X
yi [Ax]i ≤
i=1,i6=h
yi M = (1 − yh )M.
i=1,i6=h
Dunque:
k
X
xi [Ax]i = M,
i=1
e
k
X
yi [Ax]i ≤ M.
i=1
Da cui segue che
k
X
i=1
xi [Ax]i ≥
k
X
yi [Ax]i ∀y ∈ ∆.
i=1
19
yi [Ax]i .
Teorema 1.4.3 Sia x una strategia appartenente a int∆, cioè una strategia mista tale per
cui xi > 0 ∀i. Se [Ax]i = [Ax]j ∀i, j, allora x ∈ ∆N E .
Dim. Poniamo M = [Ax]i ∀i. Allora::
k
X
e
xi [Ax]i =
k
X
xi M = M
k
X
i=1
i=1
i=1
k
X
k
X
k
X
yi [Ax]i =
i=1
yi M = M
i=1
xi = M · 1 = M,
yi = M · 1 = M.
i=1
Dunque, la 1.18 vale sempre in maniera non stretta, ovvero:
k
X
xi [Ax]i =
i=1
k
X
yi [Ax]i ∀y ∈ ∆.
i=1
Questo significa x è un equilibrio di Nash simmetrico. Inoltre, tale equilibrio è non stretto.
Teorema 1.4.4 Sia x una strategia mista con un’unica componente nulla (xh = 0, xi >
0 ∀i 6= h). Se [Ax]i = [Ax]j ∀i 6= h, j 6= h, e [Ax]i ≥ [Ax]h ∀i 6= h allora x ∈ ∆N E .
Dim. Poniamo M = [Ax]i ∀i 6= h. Allora:
k
X
i=1
xi [Ax]i =
k
X
xi M = M
i=1
k
X
xi = M · 1 = M,
i=1
e
k
X
i=1
yi [Ax]i =
k
X
i=1,i6=h
yi M + yh [Ax]h = M
k
X
yi + yh [Ax]h = M (1 − yh ) + yh [Ax]h .
i=1,i6=h
Nella seconda equazione è stato sfruttato il fatto che
20
k
X
yi = 1 ⇒
i=1
k
X
yi = 1 − yh .
i=1,i6=h
Per ipotesi, si ha che M ≥ [Ax]h . Da cui:
M
yh M
yh M + M − M
M − M (1 − yh )
M
k
X
xi [Ax]i
i=1
≥
≥
≥
≥
≥
[Ax]h
yh [Ax]h
yh [Ax]h
yh [Ax]h
M (1 − yh ) + yh [Ax]h
k
X
≥
yi [Ax]i ∀y ∈ ∆.
⇒
⇒
⇒
⇒
⇒
i=1
Dunque, poichè x soddisfa la 1.18 per ogni y, allora x è un equilibrio di Nash simmetrico.
Di seguito viene mostrato come sia possibile utilizzare i teoremi precedenti per calcolare gli
equilibri simmetrici di giochi con 3 strategie.
Per quanto riguarda il calcolo degli equilibri misti interni, si pone il vettore
x1
x2
x=
1 − x1 − x2
e si calcola il vettore Ax. Successivamente, sfruttando il teorema 1.4.3, si risolve il seguente
sistema rispetto x1 ed x2 :
(
[Ax]1 = [Ax]2
[Ax]2 = [Ax]3
,
(1.19)
dove [Ax]i è l’i-esima componenteP
del vettore Ax. Se la soluzione ottenuta appartiene all’interno del simplesso (cioè xi > 0 e 3i=1 xi = 1), allora essa rappresenta un punto di equilibrio
di Nash simmetrico.
Per calcolare eventuali equilibri misti sulla frontiera, è possibile sfruttare il teorema 1.4.4.
Si supponga di voler verificare la presenza di equilibri misti sulla frontiera, ad esempio
21
considerando x1 = 0. Per prima cosa, si pone il vettore
0
x = x2
1 − x2
e si calcola il vettore Ax. Successivamente, si risolve il seguente sistema rispetto x2 :
(
[Ax]2 = [Ax]3
[Ax]2 ≥ [Ax]1
.
(1.20)
Se la soluzione ottenuta appartiene al simplesso di dimensione 3, allora essa rappresenta un
punto di equilibrio di Nash simmetrico.
Esempio 1.4.5 Consideriamo la matrice
1 2 0
A = 3 0 1 .
1 1 0
Per prima cosa, calcoliamo l’eventuale equilibrio interno. Posto x = [x1 x2 1 − x1 − x2 ]T , si
ha che:
x1 + 2x2
Ax = 2x1 − x2 + 1 .
x1 + x2
A questo punto, si risolve il seguente sistema:
(
[Ax]1 = [Ax]2
[Ax]2 = [Ax]3
(
x1 + 2x2 = 2x1 − x2 + 1
⇒
2x1 − x2 + 1 = x1 + x2
(
−x1 + 3x2 = 1
⇒
x1 − 2x2 = −1
⇒
x1 = −1
x2 = 0
x3 = 1 − x1 − x2 = 1 − (−1) − 0 = 2
Chiaramente tale soluzione non può essere un equilibrio (la componente x1 è negativa!).
Si calcola ora l’eventuale equilibrio di frontiera con x1 = 0.
22
Posto x = [0 x2 1 − x2 ]T , si ha che:
2x2
Ax = 1 − x2 .
x2
Si risolve poi il seguente sistema:
(
[Ax]2 = [Ax]3
[Ax]2 ≥ [Ax]1
(
1 − x2 = x2
⇒
1 − x2 ≥ 2x2
(
x2 = 12
⇒ 1
≥1
2
.
Poichè tale sistema è impossibile, si conclude dicendo che non ci sono equilibri misti sulla
frontiera x1 = 0.
Si calcola ora l’eventuale equilibrio di frontiera con x2 = 0.
Posto x = [x1 0 1 − x1 ]T , si ha che:
x1
Ax = 2x1 + 1 .
x1
Si risolve poi il seguente sistema:
(
[Ax]1 = [Ax]3
[Ax]1 ≥ [Ax]2
(
x1 = x1
⇒
x1 ≥ 2x1 + 1
(
x1 = x1
⇒
−x1 ≥ 1
.
Anche in questo caso il tale sistema è impossibile (x1 > 0), e si conclude dicendo che non ci
sono equilibri misti sulla frontiera x2 = 0.
Infine, si calcola l’eventuale equilibrio di frontiera con x3 = 0.
Posto x = [x1 1 − x1 0]T , si ha che:
−x1 + 2
Ax = 3x1 .
1
Si risolve poi il seguente sistema:
(
[Ax]1 = [Ax]2
[Ax]1 ≥ [Ax]3
(
−x1 + 2 = 3x1
⇒
−x1 + 2 ≥ 1
23
(
x1 = 12
⇒ 3
≥1
2
.
Il sistema in questo caso produce un risultato consistente. L’equilibrio misto sulla frontiera
x3 = 0 è:
1
1
x1 = , x2 = , x3 = 0.
2
2
1.4.3
Classificazione dei giochi simmetrici 2 x 2
In questa sezione analizziamo i giochi in cui i giocatori hanno solamente due strategie pure
a disposizione. Considerando la matrice dei payoff di un generico gioco simmetrico 2 × 2:
a11 a12
A=
(1.21)
a21 a22
Sottraendo a21 dalla prima colonna e a12 dalla seconda, otteniamo:
a11 − a21
0
0
A =
0
a22 − a12
(1.22)
Si ottiene cosı̀ una matrice simmetrica e quindi un gioco totalmente simmetrico, con matrice
dei payoff:
a1 0
0
A =
(1.23)
0 a2
Con a1 = a11 − a21 e a2 = a22 − a12 . La matrice ottenuta, per ogni gioco simmetrico 2 × 2,
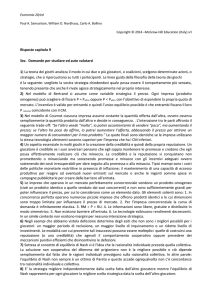
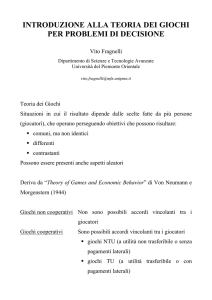
è identificata da un punto a = (a1 , a2 ) ∈ R2 . Questo punto apparterrà ad una dei quadranti
del piano cartesiano, in base al quadrante di appartenenza potremo cosı̀ identificare la categoria alla quale appartiene il gioco. La figura 1.2 ci aiuta nell’identificazione della categoria
di appartenenza.
L’utilità della divisione in categorie consiste nel fatto che tutti i giochi appartenenti a una
data categoria hanno le stesse best reply e relazioni di dominanza. Effettivamente esistono
solo tre categorie per i giochi simmetrici 2 × 2, poichè la quarta categoria è l’immagine
specchio dei giochi che compaiono nella prima categoria. Nei giochi appartenenti alla prima
categoria è evidente che la seconda strategia domina strettamente la prima, poichè a1 < 0
e a2 > 0; per tale ragione la soluzione strettamente dominante è S D = {(2, 2)} ⊂ S,
ΘN E = {(e2 , e2 )} e ∆N E = {e2 }.
Esempio 1.4.6 Un esempio di gioco simmetrico è il Dilemma del Prigioniero, in assoluto
il gioco più conosciuto della teoria dei giochi. Nel gioco ogni giocatore ha solo due strategie
pure, il dilemma si basa sulla seguente storia: Due ladri sospettati di un efferato delitto
vengono imprigionati in due celle separate e quindi con l’impossibilità di comunicare tra
24
Figura 1.2: Suddivisione in categorie dei giochi simmetrici a due giocatori, posizionando il
punto a = (a1 , a2 ) nel piano visualizzo graficamente la categoria di appartenenza
loro. Il giudice ha prove sufficienti per condannare entrambi per il reato minore, ma per
infliggere una pena maggiore ha bisogno della confessione. Il giudice offre uno sconto di
pena a chi accettasse di confessare contro l’altro (in tal caso all’accusato verrebbe inflitta
una pena maggiore mentre l’altro avrebbe uno sconto di pena). I ladri hanno due scelte
possibili: confessare o non confessare. Configureremo cosı̀ il payoff del primo e del secondo
giocatore rispettivamente con le matrici A e B:
4 0
4 5
A=
B=
(1.24)
5 3
0 3
La razionalità individuale porta ogni giocatore a scegliere la seconda strategia, poichè utilizzandola, indipendentemente dalla strategia attuata dall’altro, ottengono un payoff maggiore,
raggiungendo cosı̀ un equilibrio in strategie dominanti. Il dilemma consiste nel fatto che
entrambi i giocatori avrebbero un guadagno maggiore se selezionassero la prima strategia
pura.
Nei giochi appartenenti alla seconda categoria (a1 , a2 > 0), evidentemente avremo due
equilibri simmetrici e stretti, ed è facile verificare che la strategia mista è in equilibrio
con se stessa x̂ = (a2 /(a1 + a2 ), a1 /(a1 + a2 )) ∈ ∆. Quindi S D = S = {1, 2}, ΘN E =
{(e1 , e1 ), (e2 , e2 ), (x̂, x̂)} e ∆N E = {e1 , e2 , x̂}. I giochi di coordinamento rappresentano un
esempio di gioco appartenente alla seconda categoria.
25
Esempio 1.4.7 Si ha un gioco di coordinamento puro se, per ogni coppia di situazioni,
quando un giocatore preferisce la prima alla seconda, anche tutti gli altri giocatori manifestano la medesima preferenza. Questi sono giochi totalmente simmetrici (A = B). Vediamo
qui di seguito un generico esempio delle matrici dei payoff del primo e del secondo giocatore.
2 0
2 0
A=
B=
(1.25)
0 1
0 1
Entrambi i giocatori preferiranno il profilo di strategie s = (1, 1), che costituirà un equilibrio
di Nash stretto. Ma anche il profilo di strategie s0 = (2, 2) è un equilibrio di Nash stretto,
poichè un giocatore, se prevede con un tasso di probabilità sufficientemente alto che l’altro
giocatore giochi la seconda strategia, la scelta ottimale sarà quella di giocare anch’esso la
seconda. Nel gioco è presente un terzo equilibrio, in questo caso misto, ed è costituito dalle
coppie (x, x) ∈ ∆2 dove x = ( 13 , 23 ). Si hanno cosı̀ due equilibri di Nash puri ed uno misto.
I giochi appartenenti alla terza categoria sono caratterizzati da a1 < 0 e a2 < 0. In questi
giochi non esistono strategie dominanti S D = S, ma la best reply rispetto ad una strategia
pura è l’altra strategia pura. Pertanto tali giochi hanno due equilibri di Nash puri asimmetrici
ed uno misto simmetrico: ΘN E = {(e1 , e2 ), (e2 , e1 ), (x̂, x̂)} e ∆N E = {x̂} dove stavolta x̂ è
caratterizzato da numeratore e denominatore minori di zero. Un classico esempio di gioco
appartenente a questa categoria, è il gioco falchi e colombe.
Esempio 1.4.8 Un classico esempio nella teoria dei giochi evolutiva è il gioco falchi e colombe. Ogni giocatore ha a disposizione due strategie pure: lotta o resa. Si suppone che i
giocatori siano due animali che si contendono una preda, e ciascuno di loro può comportarsi
come falco (lotta) o come colomba (resa). Nel caso in cui uno dei due si comporta da falco,
esso avrà la meglio rispetto all’altro se si comporta da colomba, ottenendo cosı̀ payoff pari
a v > 0 e lasciando all’altro solo le briciole (payoff pari a 0). Entrambi i giocatori hanno
la stessa probabilità di vincere la lotta, e il costo in caso di perdita sarà pari a c > 0. Nel
caso in cui entrambi decidano di adottare la prima strategia, ovvero la lotta, avranno una
probabilità di vincita pari a 21 e un payoff v − c con probabilità 12 . Quindi il payoff atteso
della prima strategia contro se stessa è pari a v−c
Nel caso in cui, invece, entrambi gli animali
2
decidano di comportarsi da colombe, e quindi adotteranno la seconda strategia riusciranno
a suddividersi la preda, ottendno un payoff pari a v2 . Ecco qui indicata le matrici dei payoff:
v−c
v
2
(1.26)
A=
0 v2
mentre la matrice del secondo giocatore è B = AT . Supponiamo ora che valga la disequazione
v < c. Il caso peggiore si ha quando entrambi decidono di adottare un atteggiamento
da falchi, scelta meno conveniente, poichè finiranno per farsi del male vicendevolmente e
otterranno un payoff negativo; come conseguenza si ha che la miglior risposta per uno dei due
giocatori rispetto alla prima strategia è la seconda, ovvero la resa. Quindi le coppie (1, 2)e
26
(2, 1) costituiscono equilibri di Nash puri e stretti ma asimmetrici. Nel gioco è presente
anche un equilibrio misto simmetrico (x, x), dove x attribuisce probabilità λ = vc alla prima
strategia pura e 1 − λ alla seconda.
I giochi appartenenti alla quarta categoria sono caratterizzati da a1 > 0 e a2 < 0. La
soluzione strettamente dominante: S D = {(1, 1)} ⊂ S, ΘN E = {(e1 , e1 )} e ∆N E = {e1 }
che corrisponde, come detto prima, all’immagine specchio dei giochi appartenenti alla prima
categoria. La razionalità dei giocatori nelle partite della seconda categoria porta a pensare
che quest’ultimi giochino l’equilibrio stretto dominante (e1 , e1 ). Al contrario, gli strumenti
standard della teoria dei giochi non cooperativi non rifiutano gli altri due equilibri che sono
entrambi perfetti, ed (e2 , e2 ) è stretto. Tuttavia, dal punto di vista rigorosamente non
cooperativo ci può essere un compromesso tra efficienza e rischio strategico.
27
Bibliografia
• J. Hofbauer and K. Sigmund, Evolutionary games and population dynamics, Cambridge University Press, 1998.
• D. Madeo and C. Mocenni, Game Interactions and dynamics on networked populations,
IEEE Trans. on Autom. Control, vol. 60, n. 7, pp. 1801-1810, 2015.
• J. Maynard Smith, Evolution and the Theory of Games, Cambridge University Press,
Cambridge. 1982.
• J. Nash, Equilibrium points in n-person games, Proc. Nat. Acad. Sci. USA vol. 36,
no. 1, pp. 48-49, 1950. sity Press, 1994.
• M.A. Nowak, Evolutionary Dynamics: Exploring the Equations of Life, Belknap Press
of Harvard University Press, 2006.
• M.J. Osborne, An Introduction to Game Theory, Oxford University Press, 2003.
• J.W. Weibull, Evolutionary Game Theory, MIT Press, 1995.
• J. von Neumann and O. Morgenstern, Theory of games and economic behavior, Princeton University
• C. Brezzi, Teoria dei Giochi: Modelli e Applicazioni in un Contesto Evolutivo, Tesi di
Laura Triennale in Matematica, Università di Siena, 2014.
28