Le forze conservative
• Una forza si dice conservativa se
–
il lavoro eseguito dalla forza sul punto materiale P mentre si sposta dalla
posizione P1 alla posizione P2 dipende soltanto dalla posizione iniziale e
dalla posizione finale
– e non dal percorso effettuato, dalla traiettoria seguita per andare da P1 a
P2, ne da alcun altro parametro come la velocità, il tempo impiegato, ecc.
• Allora
– esiste una funzione U della posizione del punto
materiale P,
U(P) = U(x,y,z),
– tale che il lavoro fatto dalla forza conservativa
quando il punto materiale si sposta tra due punti
qualsiasi, P1 e P2, è dato dalla differenza tra i
valori che la funzione U assume nel punto
iniziale P1 meno quello che assume nel punto
finale P2.
q
g
P1
W
F
P2
f
F dr
i,g
U(P1) U(P2 ) U
U= energia potenziale
G.M. - Informatica B-Automazione 2002/03
y
La forza peso
B
P1
• Verifichiamo che la forza peso è conservativa:
– Dobbiamo far vedere che per qualunque percorso il lavoro
fatto dalla forza per andare da P1 a P2 è sempre lo stesso
indipendente dal percorso.
WP1AP2 WP1 A WAP2
– Prendiamo il percorso P1A P2.
WP1A P d mg
P1A cos 0
mg
P1A
P1A
A
P2
y1 y2
WP1A mg y1 y2 mgy 1 mgy 2
WP1AP2 WP1 A mgy 1 mgy 2
WAP2 P d mg
AP2
cos
0
2
– Prendiamo ora il percorso P1B P2.
WP1BP 2 WP1B WBP2 WBP 2 WP1A mgy 1 mgy 2
G.M. - Informatica B-Automazione 2002/03
y
La forza peso
P
– Prendiamo un qualsiasi percorso tra P1 e P2.
W
W
P2
P dr
P mg j
A
P1, g
dr dxi dyj dzk
P2
P2
P1, g
Pxdx Pydy Pz dz
P1, g
B
P1
dr
P2
P2
mgdy mg dy
P1, g
W mg yy 2 mgy 2 mgy 1
y
1
• L’energia potenziale potrebbe essere
U mgy
W U(P1 ) U(P2 ) mgy 1 mgy 2
G.M. - Informatica B-Automazione 2002/03
La forza elastica
x2
x1
• Valutiamo il lavoro fatto dalla forza elastica per spostare il corpo dalla
posizione x1 a x2.
– Lo spostamento è rettilineo
– ma la forza non è costante
• Utilizziamo la definizione più generale
P2
F
W
W
el
P1, g
x2
x1 ,g
dr
Felxdx Felydy Felz dz
x2
x
1 2 1 2
W k
kx 2 kx1
2
2
2 x1
2
Fel kxi
dr dxi dyj dzk
x2
x1, g
x2
kxdx k xdx
x1 ,g
Il lavoro dipende solo dai
punti iniziali e finali: la forza
1 2
elastica è conservativa!
U kx
La sua energia
potenziale:
G.M. - Informatica B-Automazione 2002/03
2
L’energia potenziale
• E’ un’altra forma di energia, legata la posizione di un corpo
– È possibile cambiare l’energia potenziale di un corpo eseguendo
del lavoro (per esempio sollevare un peso U=mgy)
• le forze conservative
– Forza peso
Ux, y, z mgy mgh
h = quota
– Forza elastica
U(x, y,z)
1 2
kx
2
Ux, y, z
– Forza di gravitazione universale
Ux, y, z
– Forza di Coulomb
GmM
r
1 q1q 2
4 o r
• La funzione energia potenziale è determinata a meno di una costante
arbitraria
U x,y,z Ux,y,z cos tan te
1
G.M. - Informatica B-Automazione 2002/03
Determinazione dell’energia potenziale
dall’espressione della forza
• Utilizzando la definizione di energia potenziale:
WP1P2 U U(P1 ) U(P2 )
P
• Che può essere riscritta, considerando i punti Po,
iniziale, e P, il generico punto dello spazio:
WPo P U U(Po ) U(P)
• Da cui:
Po
P
U(P ) U(Po ) WPo P U(Po ) F dr Non è necessario specificare la
Po
traiettoria
• Per derivare la funzione energia potenziale occorre:
– Fissare arbitrariamente un punto dello spazio Po.
– Assegnare un valore arbitrario all’energia potenziale del punto Po.
– Calcolare il lavoro effettuato dalla forza da Po al generico punto P lungo
una qualsiasi traiettoria che connetta Po con P.
G.M. - Informatica B-Automazione 2002/03
L’energia potenziale
• le forze conservative
– Forza peso
• Il punto di riferimento Po è un punto del piano xz, con y=0 (quota nulla)
• Ai punti del piano orizzontale y=0 si assegna energia potenziale nulla
Ux, y, z mgy mgh
– Forza elastica
h = quota
• Il punto di riferimento Po è la posizione dell’estremo libero della molla in
condizioni di molla non deformata, x=0.
• Quando la molla non è deformata, x=0, si assegna energia potenziale nulla
U(x, y,z)
1 2
kx
2
– Forza di gravitazione universale
– Forza di Coulomb
• Il punto di riferimento Po è il punto all’infinto.
• Al punto all’infinito, si assegna energia potenziale nulla
GmM
Ux, y, z
r
1 q1q 2
Ux, y, z
4 o r
G.M. - Informatica B-Automazione 2002/03
Il lavoro effettuato da una forza conservativa
su un percorso chiuso è nullo
• Consideriamo un percorso chiuso
W
P2
q
P1
F dr F dr F dr
P2 , g 1
P1 ,g 2
• Le forze conservative dipendono dalla
posizione.
g1
P1
F
g1
P1
F
P2
g2
q
P2
dWA F dr Fdscos q
dWR F dr Fdscos q
dWA dWR
P2
P1
F dr F dr
P1 , g 1
P 2 ,g 1
W
P2
P2
P1 ,g 2
P1 ,g 1
F dr F dr F dr 0
G.M. - Informatica B-Automazione 2002/03
Lavoro della forza di attrito
• La forza di attrito statico fa lavoro nullo:
– Nel caso di attrito statico, non c’è spostamento: quindi il lavoro è
nullo
– Se il piano di appoggio si sposta rispetto al SdR utilizzato, si
osservi che:
• il piano e l’oggetto poggiato su di esso subiscono lo stesso
spostamento
• Le forze di attrito sono uguali ed opposte (azione e reazione)
• Il lavoro complessivo è nullo
a
• La forza di attrito dinamico fa, sempre, un lavoro negativo:
– Consideriamo un oggetto che viene spostato su di un piano
orizzontale scabro.
G.M. - Informatica B-Automazione 2002/03
Lavoro della forza di attrito dinamico
• Consideriamo un punto materiale che si muove su un piano orizzontale
sulla traiettoria g tra P1 e P2.
Fa
• Il modulo della forza di attrito dinamico è
Fad d N d mg
costante
q
g
P1
P2
• Il lavoro effettuato dalla forza di attrito dinamico
WP1P2
P1P 2
P2
F
ad dr
P1, g 1
P2
Fadds cos
P1, g 1
P2
P2
mgds mg ds
d
P1 ,g 1
d
P1 ,g 1
d mg
P1P 2
è la lunghezza del tratto di traiettoria percorso
• il lavoro della forza di attrito dinamico non dipende solo dal punto
iniziale e da quello finale, ma anche dalla lunghezza della traiettoria
scelta
• Su un percorso chiuso il lavoro è diverso da zero
• La forza di attrito dinamico non è conservativa
G.M. - Informatica B-Automazione 2002/03
L’energia potenziale in presenza di più
forze conservative
• Il lavoro effettuato da tutte le forze conservative è dato da:
n
W
n
W U U
k
k 1
n
U
n
k 1
Uk
k
k 1
k 1
ki
U k f
n
n
U U
ki
k 1
kf
k 1
L’energia potenziale totale è la somma delle
energia potenziali delle singole forze
W Ui Uf
G.M. - Informatica B-Automazione 2002/03
La conservazione dell’energia
• Supponiamo di avere un punto materiale che si muove sotto l’azione di
forze conservative.
• Il teorema delle forze vive ci dice che il lavoro della risultante è uguale
alla variazione dell’energia cinetica:
WR K K f Ki
• Poiché tutte le forze sono conservative, il lavoro della risultante può
essere messo in relazione con la variazione di energia potenziale
WR U Ui Uf
U
U
k
• Combinando le due relazioni si ottiene:
K U
K U 0
K U K f Ki U f Ui K f Uf Ki Ui Ef Ei 0
E KU
energia meccanica totale
Solo forze conservative: l’energia
meccanica totale si conserva!
G.M. - Informatica B-Automazione 2002/03
Relazione lavoro energia
• Se non tutte le forze sono conservative
– Il lavoro della risultante sarà la somma del lavoro effettuato
• Dalle forze conservative Wc
• Dalle forze non conservative Wnc
WR Wc Wn c
WR K
K U Wnc
K U Wnc
K U Wnc
Wc U
E Wnc
• La variazione dell’energia meccanica totale è uguale al lavoro
effettuato dalle forze non conservative.
• Questa relazione contiene come caso particolare anche la
conservazione dell’energia
–
infatti quando non ci sono forze non conservative Wnc=0
G.M. - Informatica B-Automazione 2002/03
L’energia meccanica totale
• In presenza di forze non conservative l’energia meccanica totale non si
conserva
– La sua variazione è proprio uguale al lavoro delle forze non conservative
• In realtà non bisogna pensare che dell’energia sia andata distrutta o si
sia creata dal nulla, semplicemente c’è stato uno scambio con altre
forme di energia.
–
Nel caso di forze dissipative, attrito dinamico, resistenza passiva, il lavoro
(negativo) di queste forze è accompagnato da un aumento della
temperatura dei corpi interessati
• L’energia meccanica totale diminuisce mentre aumenta l’energia interna dei
corpi (aumento di temperatura)
– Nel caso in cui si ha un aumento dell’energia meccanica totale (per
esempio nelle esplosioni), l’energia interna contenuta nell’esplosivo è stata
trasformata in energia meccanica
• L’esplosivo ha subito una trasformazione chimica.
G.M. - Informatica B-Automazione 2002/03
L’integrale primo del moto
• La legge di conservazione dell’energia può anche essere usata per
determinare la legge oraria quando le forze agenti sono conservative.
• Con un certo numero di vantaggi sulla seconda legge della dinamica
– Equazione scalare e non vettoriale
– Equazione differenziale del primo ordine e non del secondo
• Come si fa?
– Consideriamo un moto unidimensionale: l’energia potenziale sarà solo
funzione di x, U(x).
E K U(x) cos tan te
E 12 mv x U(x)
2E U(x)
vx
m
dx
2E U(x)
dt
m
Che può essere integrata
separando le variabili
2
E è una costante
dx
dt
2E U(x)
m
G.M. - Informatica B-Automazione 2002/03
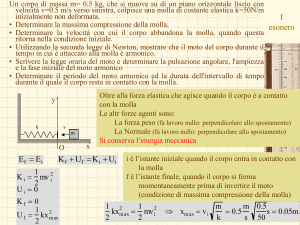
Il diagramma dell’energia
L’energia meccanica
totale
dell’oscillatore armonico
La normale N e la forza
peso non fanno lavoro
1 2
U kx
2
K<0
K<0
Punti di inversione del moto
Felx dx dU Felx
dU
dx
Punto di equilibrio stabile
N
Fel
P
G.M. - Informatica B-Automazione 2002/03
La determinazione della forza
dall’energia potenziale
• Nota l’espressione dell’energia potenziale possiamo determinare la
forza (direzione verso ed intensità)
• Superfici equipotenziali
– Sono il luogo dei punti in cui l’energia potenziale assume lo stesso valore
• Forza peso: piani orizzontali (h=cost)
• Forza elastica: piani perpendicolari all’asse x (x=cost)
• Forza di gravitazione universale e forza di Coulomb: superfici sferiche con
centro nell’origine della forza.
• La forza è perpendicolare alle superfici equipotenziale
– Consideriamo un qualsiasi spostamento infinitesimo su una superficie
equipotenziale (dr tangente alla superficie).
– Poiché la superficie è equipotenziale dU=0
dU dW F dr 0 Fdr
G.M. - Informatica B-Automazione 2002/03
La determinazione della forza
dall’energia potenziale
• Per uno spostamento che avviene lungo l’asse x:
dU
dU dW Fx dx Fx
dx
• Per uno spostamento che avviene lungo l’asse y:
dU
dU dW Fy dy Fy
dy
• Per uno spostamento che avviene lungo l’asse z:
dU dW Fz dz Fz
dU
dz
dU
dU
dU
F gradU
i
j
k
dx
dy
dz
G.M. - Informatica B-Automazione 2002/03
Il diagramma dell’energia
Punti di equilibrio instabile
Punti di equilibrio stabile
equilibrio indifferente
dU
Fx
dx
G.M. - Informatica B-Automazione 2002/03