LEZIONE 04 CINEMATICA
La CINEMATICA Descrive il moto avvalendosi dei concetti di posizione, spostamento, velocità e accelerazione
definiteoperativamente da misure di spazio e tempo e prescindendo dalle cause.
La DINAMICA Descrive il moto ( ricava le Equazioni del moto ) tenendo in considerazione le cause : le Forze.
La STATICA Studia le condizioni di Equilibrio
PUNTO MATERIALE Oggetto di dimensioni infinitesime nel quale si suppone concentrata la massa del corpo esteso.
Gli oggetti considerati punti materiali sono quelli che hanno dimensioni molto minori delle distanze in gioco.
CORPO RIGIDO ESTESO rimangono invariate le distanze fra i punti materiali che lo compongono.
Sistema di riferimento
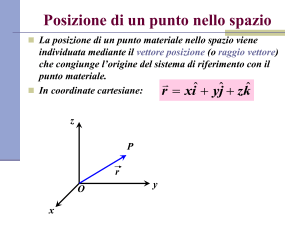
Un oggetto è in moto quando la sua posizione( vettore posizione) varia nel tempo.
Un moto che non faccia riferimento a un sistema di riferimento è privo di senso.
Il moto viene descritto, in termini di traiettoria e velocità, in modo diverso da osservatori che
utilizzano Sistemi di Riferimento diversi.
In medicina la superficie terrestre viene generalmente considerata come un sistema
di riferimento fisso. Si trascurano quindi gli effetti della rotazione e della rivoluzione terrestre.
Non confondere la legge oraria S (t) con la traiettoria y = f(x)
Nel piano la traiettoria è individuata da una y=f(x)
y
y=3x2 - 5x
O
P
x
MOTO IN DUE DIMENSIONI
(2D)
Conosciuta la traiettoria e fissato un punto O, supponiamo che P si muova sulla curva partendo da O secondo la
legge oraria S (t ) 6t 2 2
La legge oraria fornisce la lunghezza della coordinata curvilinea S misurata lungo la traiettoria, in funzione del
tempo, a partire dal punto O
S(t)
Legge oraria
t
La posizione del punto sulla traiettoria è individuato dal vettore posizione R (t ) Rx(t )i Ry (t ) j che è la composizione, istante per istante, delle due componenti rettilinee Rx (t ) e Ry (t ) , funzioni parametriche del tempo. Se
la traiettoria si chiude ritornando al punto di partenza, lo Spazio percorso ( scalare) è la lunghezza della traiettoria chiusa, mentre lo Spostamento ( vettore) è nullo.( vedi figura)
y
∆R=Spostamento
S spazio
R1
R 2 vettore posizione
x
x
velocità scalare media VS .media
SpazioPercorso S S0 S
t t0
t
t
da cui
ΔS = Vmedia Δt quindi S(t) = S(t0) + VmediaΔt *
La velocità scalare media esprime il concetto di rapidità con cui viene percorso lo spazio lungo una traiettoria
(speed)
Velocità scalare istantanea V (t ) lim t 0
S
( vedremo che è il modulo della velocità vettoriale istantanea V
t
Accelerazione scalare media aSc.media t _ t0
V t V0
t t0
V
( variazione media della velocità scalare )
t
V (t ) V (t0 ) asc _ media (t t0 )
Accelerazione scalare istantanea a (t ) Limt 0
V
t
( variazione istantanea della velocità scalare )
In queste equazioni non appaiono informazioni sulla direzione e il verso della velocità.
E’ quindi sempre necessario conoscere la traiettoria.
VELOCITA’ E ACCELERAZIONE VETTORIALI
Nella Velocità vettoriale, media ed istantanea, si utilizzano i vettori Posizione e Spostamento.
y
y
x
x
Il Vettore Spostamento R è la corda ( non l’arco effettivamente percorso ).
r
r
r
r
r
r
R R(t + t ) - R(t ) [ Rx (t + t ) i + Ry (t + t ) j] - [ Rx (t ) + Ry (t )]
VMedia =
=
=
=
t
t
t
Rx r Ry r x r y r
=
i+
j=
i+
j
t
t
t
t
r
La velocità vettoriale media è chiamata Velocità Media ed ha la direzione di R
Non confondere Velocità Media con Velocità scalare media
Al limite Δt→0 Velocity
r
r
r
r
R
x r y r
dx r dy r
VIsta = Limt ® 0
= Limt ® 0 ( i +
j) =
i+
j = Vx i + Vy j
t
t
t
dt
dt
r
r
r
r
r
R dR d ( S u )
VISTANYT . = Limt ® 0
=
=
= V uT
t
dt
dt T
La velocità istantanea avrà la direzione della tangente alla curva in P, rappresentata dal versore uT .
r
Per t 0 , il modulo della corda dR si confonde con la lunghezza dS dell’arco ( spazio percorso), per cui
r
r
dR = dS uT
Il modulo della velocità vettoriale istantanea coincide con la velocità scalare istantanea
dS
dt
ACCELERAZIONE VETTORIALE
Esprime la rapidità con la quale il vettore velocità cambia nel tempo il suo modulo e/o la sua direzione
y
VF
Vi
V VF Vi
Il vettore a ha sempre la direzione di V e, in generale, non è tangente alla traiettoria come la velocità.
a avrà una componente //// a V ( aT ) e una componente V ( a ).
r
NB: Esiste una V e quindi una accelerazione anche quando Vi e VF hanno moduli uguali ma direzioni diverse. ( Es: moto circolare uniforme)
r
Nel moto Rettilineo V e quindi l’accelerazione hanno la direzione di Vi e di VF . L’accelerazione è detta
tangenziale ( aT ) ed è dovuta alle variazioni del modulo della velocità.
La componente a è invece dovuta alla variazione della direzione del vettore velocità ed è detta Centripeta.
MOTO CIRCOLARE
dS
radianti, adimensionale
r
d : modulo d , direzione asse rotazione-normale piano rotazione, verso vite destrosa
d
il modulo della velocità angolare =
d dS V
V r
dt r dt r
A parità di velocità angolare, la velocità periferica aumenta con il raggio.
La velocità angolare e la frequenza avrebbero unità di misura rappresentate nello stesso modo.
= s-1 ; f = s-1.
Per chiarezza nella velocità angolare si mantiene il nome rad (rad/s)
a
Derivando rispetto al tempo se r = cost (moto circolare)
dV dr
d
r
r
dt
dt
dt
T(Periodo) è il tempo necessario per percorrere 2π radianti
2
2 f
T
rad
sec