AUMENTO DELL’ATTIVITA’ MUSCOLARE VOLONTARIA MEDIANTE UTILIZZO DI
FEEDBACK VISIVO: STUDIO PILOTA.
Grazzina F. , Rejc E.
1 – INTRODUZIONE E OBIETTIVI
La lesione del LCA è un evento che causa instabilità anatomo-funzionale dell’arto inferiore.
La necessità di abbreviare ed ottimizzare il recupero funzionale degli atleti pone l’attenzione sulla
ricerca di nuove metodologie e tecnologie in grado di stimolare adattamenti che possano contribuire
a ritornare in tempi brevi ad un rendimento simile a quello precedente il trauma.
L’intervento chirurgico di ricostruzione del LCA permette il ripristino della stabilità anatomica, ma
in assenza di una adeguata riabilitazione continuerà a persistere l’instabilità funzionale.
Abbiamo quindi pensato di realizzare uno strumento che permetta di evitare tutte le problematiche
legate all’immobilizzazione, che serva a coadiuvare la mobilizzazione domiciliare precoce postchirurgica con e senza carico e che permetta il monitoraggio dei miglioramenti da parte del medico
nelle visite di controllo successive.
Alcuni punti dell’utilizzo del sistema studiato pongono l’accento sul miglioramento della
coordinazione motoria precoce e dell’azione “agonisti – antagonisti”; viene posta inoltre attenzione
alla mobilizzazione del tricipite surale.
Con le dovute modifiche, questo progetto permetterebbe anche l’introduzione di un carico precoce
progressivo, e lo stesso potrebbe essere gestito dal paziente in base alle sue sensazioni.
Nel lavoro di Rizzello e Ligazzolo (1993) viene data molta importanza durante la rieducazione
all’utilizzo e sviluppo di processi cognitivi quali attenzione, memoria, percezione e volontà, dai
quali deriva la qualità stessa del recupero.
Si potrebbe ipotizzare una precoce funzione di riattivazione muscolare e percettiva grazie ai
movimenti attivi del paziente con carichi variabili programmando specifici esercizi, valutando la
precisione della risposta per le prime tre settimane, anche “on line”. Ulteriori studi e modifiche
possono estendere l’utilizzo dello strumento in oggetto anche nella terza-quarta settimana,
modificando la superficie d’appoggio plantare sostituendo esercizi di feedback che prevedono
l’utizzo di palloni di diverse dimensioni e forme.
Uno studio condotto su esercizi di equilibrio in stazione eretta ha mostrato un incremento
dell’attività muscolare utilizzando un feedback visivo (Rougier 2003). Un altro lavoro (Prablanc
1992) mostra come un feedback visuo-chinestesico durante esercizi di reaching possa migliorare
l’esecuzione di un movimento che, una volta impostato per raggiungere un obiettivo, debba essere
improvvisamente modificato per il cambio di posizione del target stesso.
Lo scopo di questo studio è verificare se esercizi di flesso estensione della gamba accompagnati
da un obiettivo di coordinazione fine, verificabile mediante feedback, attivino maggiormente la
muscolatura dell’arto inferiore in esame rispetto ad un medesimo movimento svolto senza alcuna
consegna specifica. In aggiunta, si vuole rilevare se l’eventuale aumento di attività muscolare porti,
nel tempo, ad aumenti d’espressione di forza.
Il raggiungimento di obiettivi di coordinazione fine di discreta difficoltà dovrebbe portare ad una
consistente attività muscolare dell’arto impegnato nell’esercizio, anche per un aumento della
motivazione del soggetto a svolgere i compiti motori assegnatigli. Questa situazione dovrebbe
indurre, dopo il periodo di trattamento, un aumento d’espressione di forza maggiore rispetto a
soggetti svolgenti movimenti senza alcun obiettivo.
2 – PROTOCOLLO SPERIMENTALE
Il soggetto di questo studio è uno studente di sesso maschile senza alcuna patologia, che ha svolto in
successione le seguenti prove:
1)
Prova “retta”
Il soggetto doveva svolgere le seguenti prove di flesso estensione della gamba sulla coscia, per una
durata di 45’’:
i) senza feedback - SF: semplici movimenti di piegamento e distensione della gamba sulla coscia.
ii) con feedback - CF : i movimenti dell’arto venivano riprodotti su di uno schermo, e l’obiettivo era
quello di svolgere movimenti i più rettilinei possibile.
2)
Prova “numeri”
Il soggetto doveva raggiungere con la pianta del piede (senza sollevarlo) ed effettuare una
leggerissima pressione sul numero dettato dall’operatore, secondo un ordine casuale, e poi tornare
al punto di partenza. La durata della prova era di 45’’.
3
2
1
4
5
Fig. 1: Schema della pedana sulla quale è stato svolto il test di reaching “numeri”.
3)
Prova “bersagli”
Il soggetto appoggiava il piede sopra un apposito strumento che permetteva di comandare un
puntatore sullo schermo del computer, e con una leggera pressione dell’avampiede poteva dare un
comando. In questo test, della durata di 45’’, apparivano sullo schermo in ordine sparso dei piccoli
bersagli, che dovevano essere raggiunti dal puntatore e doveva essere azionato il comando tramite
avampiede.
4)
Prova “bersagli inversi”
Il soggetto appoggiava il piede sopra lo strumento precedentemente descritto e svolgeva gli stessi
compiti; la difficoltà ulteriore consisteva nel fatto che i comandi erano invertiti: spostando il piede a
destra il puntatore si spostava a sinistra, e così di seguito.
Durante l’esecuzione dei test sopra esposti è stata misurata l’attività elettromiografica
(elettromiografo: diametro elettrodi: 5mm, distanza interelettrodo: 40mm, preamplificazione del
filtraggio a passa banda - CMRR ≥ 70dB, PB = 10Hz-1KHz, Zin= 1,5MΩ, guadagno = 1000) dei
muscoli retto femorale, vasto mediale, vasto laterale, bicipite femorale, gastrocnemio laterale,
posizionando accuratamente gli elettrodi (Stegeman 2000, De Luca 1992) ed acquisendo i segnali
ad una frequenza di campionamento di 1000 Hz (Biopac MP100).
3 - RISULTATI
1)
Prova “retta”
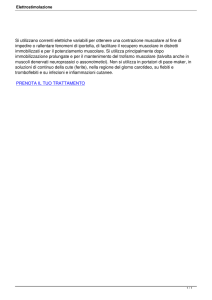
Test "retta"
CF [V/s]
2,500
SF [V/s]
iEMG [V/s]
2,000
1,500
1,000
0,500
0,000
soleo
tibiale ant.
vasto med.
bicipite fem.
retto fem.
gastro lat.
Fig. 2: attività EMGrafica integrata durante movimenti flesso estensori del ginocchio con (CF) e senza (SF)
feedback visivo.
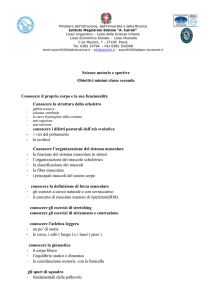
2, 3, 4) Esercizi di reaching
4,000
numeri [V/s]
bersagli [V/s]
3,500
bers - inv [V/s]
Reaching
iEMG [V/s]
3,000
2,500
2,000
1,500
1,000
0,500
0,000
soleo
tibiale ant.
vasto med.
bicipite fem.
retto fem.
gastro lat.
Fig. 3: attività EMGrafica integrata durante movimenti di reaching a comando vocale (numeri) e con
feedback visivo normale (bersagli) e con comandi invertiti (bers – inv).
I dati presentati riscontrano un notevole incremento di attività muscolare utilizzando il feedback
visivo per i muscoli soleo e bicipite femorale.
L’assenza di risultati evidenti per gli altri muscoli esaminati è probabilmente dovuta ad alcune
differenze biomeccaniche riscontrate tra le due posizioni di esecuzione dei test.
Ulteriori sperimentazioni potranno rilevare quali condizioni biomeccaniche forniscano i risultati
migliori in ambito riabilitativo, e potranno indicare eventuali significatività statistiche dei dati
rilevati.
4 - BIBLIOGRAFIA
De Luca, C., Knafliz, M., 1992. Surface Electromyography: What’s New?
CLUT Torino.
Prablanc, C., Martin, O.,1992. Automatic control during hand reaching at undetected twodimensional target displacements. In: J Neurophysiology (2):455-69.
Rougier, P., 2003. Visual feedback induces opposite effects on elementary centre of gravity
and centre of pressure minus centre of gravity motions in undisturbed upright stance.
In: Clinical biomechanics, vol. 18, no. 4, pp. 341-349(9).
Stegeman, D., Merletti, R., Rau,G., Hagg, G., Harlaar, J., Baten, C., Hogrel, J.Y.
CD rom SENIAM 2000.
Rizzello C., Ligazzolo M.A., 1992. Principi di trattamento. In: De Giovanni Emilio: Il
trattamento riabilitativo nelle lesioni traumatiche dell’arto inferiore. Edizioni Sbm, Bologna.
Severio Colonna. Legamento Crociato anteriore: rieducazione funzionale e valutazione dei
risultati. Edi-ermes.
Contatti:
[email protected]
348-2382114