Ins. Antonio Palladino
FISICA - La Statica dei Corpi Rigidi
Statica dei corpi rigidi
1. Definizione di Equilibrio del punto materiale
La Statica studia l’equilibrio dei corpi rigidi. Un corpo è in equilibrio se esso è in quiete e rimane
in quiete al trascorrere del tempo.
In primo luogo studieremo l’equilibrio del punto materiale. Ricordiamo che nella cinematica si è
detto che un corpo si può approssimare ad un punto materiale (di dimensioni puntiformi, ma dotato
di massa) quando le sue dimensioni sono piccole rispetto al sistema di riferimento e ad i movimenti
che il corpo stesso può compiere.
Un corpo approssimabile ad un punto materiale è allora in equilibrio se esso è in quiete e rimane
in quiete al trascorrere del tempo.
Definiamo adesso la risultante delle forze: per risultante delle forze si intende la somma
vettoriale di tutte le forze che agiscono su un punto materiale. La risultante delle forze si indica con
il simbolo R .
Condizione di equilibrio
Si dice allora che un punto materiale è in equilibrio quando la somma delle forze che agiscono sul
punto è nulla. In simboli si scrive:
F1 F2 F3 FN R 0
Le F sono le varie forze agenti sul punto e R è la risultante.
Tale condizione può verificarsi se:
a) sul corpo non agisce nessuna forza;
b) sul corpo agiscono due forze uguali (per modulo e direzione) ed opposte (per verso);
c) sul corpo agiscono tre o più forze la cui somma vettoriale (metodo punta-coda) risulta
essere un vettore nullo.
La condizione di equilibrio del punto materiale è una chiara conseguenza del 1° principio della
dinamica, che afferma che un corpo su cui agiscono forze la somma delle quali è zero permane nel
suo stato di quiete (o di moto rettilineo uniforme).
Esempio 1. Un libro è posto su un tavolo e resta in
equilibrio su di esso. Quali sono le forze in gioco?
Sul libro agiscono due forze:
a) la forza peso, esercitata dalla Terra, diretta lungo la
verticale, dall’alto verso il basso;
b) la forza vincolare, esercitata dal tavolo, diretta lungo la
verticale, dal basso verso l’alto.
Le due forze sono evidentemente uguali ed opposte, e la loro
somma è quindi nulla.
Esempio 2. Una pallina è sospesa ad un filo fissato al soffitto di una
stanza e resta ferma in equilibrio. Quali sono le forze in gioco?
Sulla pallina agiscono due forze:
a) la forza peso, esercitata dalla Terra, diretta lungo la verticale, dall’alto
verso il basso;
b) la forza vincolare, esercitata dal filo, diretta lungo la verticale, dal
basso verso l’alto.
Anche qui le due forze sono evidentemente uguali ed opposte, e la loro
somma è nulla.
1 – Statica dei corpi rigidi
FVINC
P
FVINC
P
Ins. Antonio Palladino
FISICA - La Statica dei Corpi Rigidi
Esempio 3. Un pesetto è sospeso a due fili fissati a dei sostegni verticali e resta fermo in
equilibrio. Quali sono le forze in gioco?
Sul pesetto agiscono tre forze:
a) la forza peso, esercitata dalla Terra, diretta lungo la
verticale, dall’alto verso il basso;
T2
T
b) le due forze vincolari, esercitate dai fili, dirette come in
1
P
figura 3, lungo le direzioni dei fili stessi.
Anche qui le tre forze hanno somma nulla, come si può
verificare applicando il metodo punta-coda ai tre vettori.
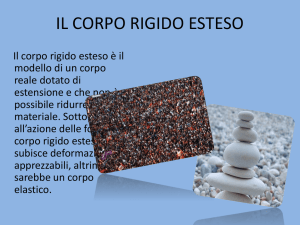
2. Equilibrio di un corpo rigido
Non tutti gli oggetti sono approssimabili a punti materiali, anzi lo studio della Statica riguarda
precipuamente proprio gli oggetti non puntiformi, denominati corpi rigidi. Un corpo rigido è un
corpo esteso, composto di particelle le cui distanze reciproche restano sempre invariate. Un corpo
rigido è cioè un oggetto indeformabile.
Il corpo rigido è un oggetto ideale poiché non esistono nella realtà oggetti assolutamente
indeformabili: anche il diamante, la più dura delle sostanze, si può comprimere o rompere. Molti
oggetti, anche di uso quotidiano, si possono però approssimare abbastanza bene a corpi rigidi.
L’astrazione del corpo rigido è molto utile poiché semplifica notevolmente i problemi.
Un punto materiale può solo traslare, cioè cambiare di posizione; invece un corpo rigido oltre a
traslare può anche ruotare. Quindi i movimenti a cui può essere soggetto un corpo rigido sono la
traslazione e la rotazione.
2a. Risultante delle forze agenti su un corpo rigido
Se le forze sono applicate tutto nello stesso punto del corpo rigido, la risultante è semplicemente la
somma vettoriale delle singole forze, calcolata come di consueto con la regola del parallelogramma
(figura a) o con il metodo punta-coda (figura b).
Ma a differenza di un punto materiale, su un corpo rigido le forze possono essere applicate anche
in punti distinti e allora diviene più complesso determinare la risultante (figura c).
R
F2
F1
F3
R
figura a
'
F3
F2
'
F2
F1
figura b
figura c
In primo luogo cominciamo col dire che se spostiamo una forza agente su un corpo rigido lungo la
sua linea d’azione in un altro punto dello stesso corpo, l’effetto è lo stesso, cioè il corpo rigido sarà
soggetto allo stesso movimento.
F
F
2 – Statica dei corpi rigidi
F
Ins. Antonio Palladino
FISICA - La Statica dei Corpi Rigidi
Risultante di forze applicate sulla stessa retta
Se due o più forze sono applicate ad un corpo rigido sulla stessa retta, la risultante delle forze è
uguale alla somma vettoriale delle forze e può essere applicata in un punto qualunque della retta.
FB
FA
FB
figura a
R
FA
figura b
figura c
Infatti, come appare dalla figura, è possibile spostare le due forze dai loro punti di applicazione
lungo la retta d’azione in modo che esse insistano sullo stesso punto di applicazione (figura b);
successivamente esse si possono addizionare come di consueto (figura c).
Risultante di forze non parallele applicate in punti diversi (forze concorrenti)
Se due o più forze non parallele sono applicate in punti diversi di un corpo rigido, la loro
risultante si ottiene prima spostando le due forze lungo le rispettive rette d’azione fino al punto di
intersezione e poi eseguendo la somma vettoriale secondo le regole consuete.
FA
FA
A
O
FB
B
figura a
FA
O
FB
R
FB
figura b
figura c
Risultante di forze parallele aventi lo stesso verso (forze parallele e concordi)
Se al corpo rigido sono applicate due forze parallele, per determinare la risultante non si possono
applicare le regole precedenti, in quanto pur spostandole lungo le rispettive rette d’azione, esse
rimarranno sempre parallele e non potranno essere applicate nello stesso punto.
Vediamo allora come si procede:
FA
FA
A
FB
FB
A'
B'
B
figura a
R
FA
figura b
A'
FB
P
dA
dB
B'
figura c
Detti A e B i punti di applicazione delle due forze, in primo luogo spostiamo le due forze lungo le
loro rette d’azione in A’ e B’, in modo che la congiungente A’B’ sia perpendicolare alle due rette
(figura b); la risultante ha lo stessa direzione e lo stesso verso delle due forze e modulo pari alla
somma dei rispettivi moduli; il punto di applicazione P è compreso tra A’ e B’ e ha distanze da A’ e
B’ rispettivamente indicate con dA e dB (figura c). Tali distanze sono legate alle intensità delle due
forze, secondo la relazione:
Fa ·d a Fb ·d b
3 – Statica dei corpi rigidi
Ins. Antonio Palladino
FISICA - La Statica dei Corpi Rigidi
Risultante di forze parallele aventi verso opposto (forze parallele e discordi)
La situazione è analoga al caso precedente. Vediamo come si procede:
FA
FA
A
B
FB
FA
R
B'
FB
A'
figura a
figura b
B'
A'
P
FB
dB
dA
figura c
Detti A e B i punti di applicazione delle due forze, come prima spostiamo le due forze lungo le
loro rette d’azione in modo che la congiungente A’B’ sia perpendicolare alle due rette (figura b); la
risultante ha le stessa direzione delle due forze, il verso della maggiore e intensità uguale alla
differenza delle due forze; il punto di applicazione P è posto all’esterno di A’B’, dalla parte della
forza maggiore e ha distanze da A’ e B’ indicate come prima con dA e dB (figura c). Anche in questo
caso le distanze sono legate alle intensità delle due forze secondo la relazione:
Fa ·d a Fb ·d b
2b. Coppia di forze
Una coppia di forze è insieme particolare di due forze di uguale modulo, di direzioni parallele e di
verso opposto. Le rette su cui giacciono le forze sono dette rette d’azione. La distanza d tra le due
rette d’azione è detta braccio della coppia. La coppia di forze ha evidentemente risultante uguale a
zero, poiché le due forze sono uguali ed opposte.
d
d
d 0
Anche se la risultante è zero, l’effetto di una coppia di forze su un corpo è tutt’altro che
trascurabile. Vedremo infatti che le coppie sono responsabili dei movimenti di rotazione del corpo
rigido.
Per caratterizzare una coppia di forze, in fisica si usa una grandezza ad hoc, il momento.
Il momento di una coppia di forze è una grandezza vettoriale M definita nel seguente modo:
1) il modulo M è dato dal prodotto M F d , dove F è il modulo delle due forze e d è la
distanza delle loro rette d’azione;
2) la direzione è quella perpendicolare al piano in cui si trovano le due forze della coppia;
3) il verso si individua con la regola della mano destra.
Più semplicemente, possiamo intendere il momento di una coppia positivo quando la coppia di
forze induce una rotazione in senso antiorario e negativo quando la coppia induce una rotazione in
senso orario.
Il momento aumenta con l’aumentare del modulo delle forze e della distanza tra le loro rette
d’azione; se le due forze giacciono sulla stessa retta d’azione il braccio della coppia è zero e quindi
il momento della coppia risulta nullo.
2c. Equilibrio di un corpo rigido
4 – Statica dei corpi rigidi
Ins. Antonio Palladino
FISICA - La Statica dei Corpi Rigidi
Ci chiediamo se la condizione che la risultante delle forze sia nulla sia sufficiente per assicurare
che un corpo rigido sia in equilibrio. La condizione che la risultante delle forze sia zero non è
sufficiente per garantire l’equilibrio di un corpo rigido. Infatti se al corpo rigido è applicata una
coppia di forze (che ha risultante nulla), il corpo rigido inizierà a ruotare (figura b), finché le forze
non si dispongono sulla stessa retta d’azione (figura c).
figura a
figura b
figura c
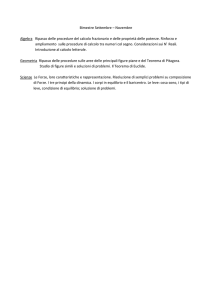
Possiamo inoltre affermare che quanto più elevato è il momento di una coppia, tanto più alta è
l’entità della rotazione indotta sul corpo rigido. La sbarretta della figura a è sottoposta ad una
coppia di momento M = 18 N·m; nella figura b il momento della coppia è maggiore (M = 30 N·m),
in quanto, sebbene le forze siano rimaste invariate, il braccio della coppia è aumentato; è evidente
che la sbarretta della figura b ruoterà più velocemente di quella della figura a. Confrontando poi la
figura c con la figura a il braccio della coppia è rimasto invariato, mentre le forze sono aumentate
d’intensità; il momento è pari a M = 30 ·m, come nel secondo caso e la sbarretta tenderà a ruotare
con la stessa velocità della sbarretta della figura b.
F 5N
F 3N
F 3N
d 6m
d 10 m
d 6m
figura a
figura b
figura c
Concludendo, possiamo affermare che un corpo rigido è in equilibrio quando esso non trasla né
ruota. Affinché ciò si verifichi, è sufficiente che:
1. la risultante delle forze R sia uguale a zero; ciò assicura l’assenza di movimenti di
traslazione;
2. la risultante dei momenti M delle forze sia uguale a zero; ciò assicura l’assenza di
movimenti di rotazione.
3. Baricentro
Il baricentro o centro di gravità di un corpo rigido è un punto ideale in cui si può ritenere applicata
concentrato tutto il peso del corpo.
5 – Statica dei corpi rigidi
Ins. Antonio Palladino
FISICA - La Statica dei Corpi Rigidi
Il corpo rigido può essere immaginato come un insieme di volumetti, che occupano posizioni fisse
gli uni rispetto agli altri, ognuno con un proprio peso; si viene a determinare un insieme di forze
parallele e concordi, tutte dirette verso il basso; la risultante di tutti questi pesi parziali fornisce,
naturalmente, il peso dell’intero corpo. Si chiama allora baricentro o centro di gravità del corpo
rigido il punto di applicazione della forza-peso del corpo, cioè il centro delle numerose forze
relative ai pesi dei volumetti in cui immaginiamo di scomporre il corpo rigido.
G
P
Per determinare la posizione del baricentro di un corpo, dobbiamo distinguere se il corpo è
omogeneo con un centro di simmetria oppure no:
a) se il corpo è omogeneo (cioè fatto dello stesso materiale in tutte le sue parti) ed ha un centro
di simmetria, allora il baricentro coincide con tale punto. È questo il caso di tutti i corpi
omogenei, aventi forme regolari, come quadrati, rettangoli, cerchi, triangoli, ecc. Nel caso del
triangolo il baricentro fisico coincide con il baricentro geometrico (punto d’incontro delle
mediane). Nel caso di quadrato, rettangolo, rombo, ecc., il baricentro coincide con il punto
d’incontro delle diagonali.
b) se il corpo è non è omogeneo, la determinazione della posizione del baricentro può essere
fatta per via matematica (cioè utilizzando opportune formule) o per via sperimentale.
G
G
G
G
G
Baricentri di corpi simmetrici ed omogenei
Osserviamo una cosa importante: non è detto che il centro di gravità di un
corpo rigido sia un punto appartenente al corpo rigido stesso. Per esempio il
centro di gravità di un anello è nel suo centro, dove non c’è materia
appartenente all’anello.
G
Oltre che in statica, il baricentro ha grossa importanza nella dinamica dei corpi rigidi. Il teorema
del moto del baricentro afferma che il baricentro di un corpo rigido si muove come un punto
materiale nel quale sia addensata tutta la massa del sistema e sia assoggettato al risultante di tutte le
forze agenti sul corpo stesso.
3a. Condizione di equilibrio di un corpo rigido appoggiato su un piano
Un corpo appoggiato su un piano è in equilibrio quando la verticale passante per il suo baricentro
cade all’interno della sua base di appoggio. Finché questo accade (fig. a, fig. b), sul corpo rigido
agiscono la forza di gravità e la reazione vincolare, le quali costituiscono una coppia di braccio
nullo: poiché allora la risultante delle forze è zero e la risultante dei momenti pure è zero, il corpo
6 – Statica dei corpi rigidi
Ins. Antonio Palladino
FISICA - La Statica dei Corpi Rigidi
resta in equilibrio, senza ruotare né traslare. Se invece la verticale passante per il baricentro del
corpo fuoriesce dalla base di appoggio (fig. c), la forza di gravità e la reazione vincolare
costituiscono una coppia di braccio diverso da zero: poiché il momento è diverso da zero, si genera
una rotazione e il corpo cade.
G
FVINC
FVINC
FVINC
G
P
P
fig. a
fig. b
G
P
fig. c
3b. Condizione di equilibrio di un corpo rigido sospeso in un punto
Un corpo sospeso (vincolato) in un punto è in
equilibrio quando la verticale abbassata dal punto di
FVINC
FVINC
sospensione passa per il baricentro del corpo.
Se questo accade (fig. a), sul corpo rigido agiscono
la forza di gravità e la reazione vincolare, le quali
costituiscono una coppia di braccio nullo: poiché
allora la risultante delle forze è zero e la risultante dei
G
G
momenti pure è zero, il corpo resta in equilibrio. Se
invece la verticale passante per il punto di appoggio
non passa per il baricentro del corpo (fig. b), la forza
P
P
di gravità e la reazione vincolare costituiscono una
coppia di braccio diverso da zero: poiché il momento è diverso da zero, si genera una rotazione che
riporta il corpo nella posizione di equilibrio.
4. Classificazione dell’equilibrio
L’equilibrio può essere di tre tipi: stabile, instabile e indifferente.
4a. Equilibrio stabile
Una posizione è di equilibrio è stabile quando, spostando leggermente l’oggetto da tale posizione
di equilibrio, esso tende a ritornarvi. Una semisfera appoggiata su un tavolo è in equilibrio stabile,
poiché, se pure spostata di poco, ritorna nella posizione iniziale. Anche un quadro appeso alla
parete, con il baricentro posto sulla verticale del chiodo, in basso, è in equilibrio stabile.
4b. Equilibrio instabile
L’equilibrio è instabile quando, spostando anche di pochissimo l’oggetto dalla posizione di
equilibrio, esso si allontana definitivamente da essa, per portarsi in una diversa posizione di
equilibrio. Un cono appoggiato su un tavolo con la punta in basso è in equilibrio instabile, poiché,
se pure spostato di pochissimo, crolla a terra. Un quadro appeso alla parete, a testa in giù, con il
baricentro posto sulla verticale del chiodo, ma in alto, è in equilibrio instabile: anche se con un po’
di fatica si riesce a metterlo in tale posizione, basterà un piccolissimo spostamento per riportarlo
giù, nella posizione di equilibrio stabile.
4c. Equilibrio indifferente
L’equilibrio è indifferente quando, spostando l’oggetto dalla posizione di equilibrio, esso non
tende né a ritornare nella posizione di partenza, né a portarsi verso un’altra situazione di equilibrio,
7 – Statica dei corpi rigidi
Ins. Antonio Palladino
FISICA - La Statica dei Corpi Rigidi
ma mantiene la nuova posizione. Una sfera appoggiata su un tavolo è in equilibrio indifferente
poiché essa, spostata dalla posizione iniziale, resta permanentemente nella nuova posizione.
Analogamente un quadro appeso nel suo baricentro è in equilibrio indifferente, poiché esso
mantiene qualunque inclinazione assegnata.
equilibrio stabile
equilibrio instabile
equilibrio indifferente
5. Macchine semplici
Non sempre è facile sollevare dei corpi pesanti servendosi dei propri muscoli; in certi casi ci si
riesce solo attraverso l’uso di macchine come il piano inclinato, le leve, le carrucole, ecc.
In generale, si definisce macchina semplice un dispositivo meccanico che serve per equilibrare o
vincere una forza (detta forza resistente) applicando un’altra forza di modulo e direzione diversa,
(detta forza motrice). Il rapporto tra la forza resistente e la forza motrice è detto guadagno della
macchina:
forza resistente
guadagno
forza motrice
Ovviamente l’uso della macchina è tanto più conveniente quanto più piccola è forza motrice da
applicare rispetto alla forza resistente, cioè quanto più alto è il suo guadagno. Una macchina è detta
vantaggiosa se il guadagno è maggiore di 1 (la forza motrice è minore della forza resistente),
svantaggiosa se il guadagno è minore di 1 (la forza motrice è maggiore della forza resistente).
5a. Le leve
La leva è la più antica macchina elementare in quanto appare addirittura nell'arte egizia di circa
5000 anni fa. Nella figura è rappresentata una leva. Essa consiste in una trave AB più o meno lunga,
appoggiata o in grado di ruotare intorno ad un asse fisso passante per il punto O detto fulcro della
leva. Agli estremi della trave sono applicate dall’esterno nel punto A la forza motrice Fm e nel
Fr . Le
distanze OA e OB delle forze Fm ed Fr
punto B la forza resistente
dal fulcro O prendono il nome di bracci
della leva e, in particolare, di braccio della
forza motrice (indicato con bm) e braccio
della forza resistente della leva (indicato
con br).
bm
A
O
Fm
br
B
Fr
fulcro
Vogliamo trovare la relazione matematica esistente tra Fm , Fr , bm e br quando la leva è in
equilibrio. Affinché ci sia equilibrio occorre che la trave AB non trasli né ruoti.
Cominciamo dall’assenza di traslazione. Fm e Fr non sono le uniche forze esercitate sulla leva; il
fulcro esercita una forza vincolare FV . Per l’equilibrio di traslazione la risultante delle forze deve
essere nulla:
Fm Fr FV 0
8 – Statica dei corpi rigidi
Ins. Antonio Palladino
FISICA - La Statica dei Corpi Rigidi
da questo si ha che:
FV Fm Fr
La forza FV esercitata dal fulcro ha quindi
FV
modulo pari alla somma delle due forze Fm
e Fr , stessa direzione e verso opposto.
L’assenza di rotazioni impone che la
somma dei momenti delle coppie agenti sulla
trave sia pari a zero; a prima vista però non
sembrano esserci delle coppie (essendoci
bm
A
O br
Fm
B
Fr
solo 3 forze), ma dato che FV in modulo è
fulcro
data dalla somma di Fm e Fr , la situazione
della trave si può vedere come in figura sotto, scomponendo FV :
È evidente allora che sulla leva agiscono:
a) una coppia data da Fm e Fm , di
braccio bm, di momento M m Fm ·bm , che
tende a far ruotare la leva in senso antiorario
(momento positivo);
b) una coppia data da Fr e Fr , di
braccio br, di momento M r Fr ·br , che
A
Fm
bm
Fm
Fr
O
br
B
Fr
fulcro
tende a far ruotare la leva in senso orario (momento negativo).
Le due coppie inducono versi di rotazione opposti; per l’equilibrio occorre che i loro momenti
debbano bilanciarsi:
Mm Mr
e quindi:
Fm ·bm Fr ·br
Vediamo così che la leva è in equilibrio quando il momento della forza motrice è uguale al
momento della forza resistente, cioè quando i prodotti delle forza per i relativi bracci sono uguali. In
sostanza, forze e bracci sono inversamente proporzionali. La relazione precedente si può anche
scrivere:
Fm : Fr br : bm
Classificazione delle leve
Le leve si possono suddividere in tre generi diversi, detti di 1ª specie, di 2ª specie e di 3ª specie.
Leve di 1ª specie.
Le leve si dicono di 1ª specie quando la forza motrice e la forza resistente sono poste da lati
opposti rispetto al fulcro; le leve viste in precedenza erano di 1ª specie.
Le leve di 1ª specie possono essere vantaggiose o svantaggiose, a seconda di se è maggiore la
forza resistente o la forza motrice.
9 – Statica dei corpi rigidi
Ins. Antonio Palladino
A
bm
FISICA - La Statica dei Corpi Rigidi
O
Fm
br
B
A
Fr
bm
br
O
Fm
B
Fr
fulcro
fulcro
leva di 1° genere vantaggiosa
leva di 1° genere svantaggiosa
Esempi di leve di 1ª specie sono la bilancia a bracci uguali (quella che si usa per le misure di
massa), l’altalena, le mollette per stendere i panni, le forbici, il “piede di porco”, ecc.
Leve di 2ª specie.
Le leve si dicono di 2ª specie se la forza
resistente è posta tra il fulcro e la forza
motrice.
Le leve di 2ª specie sono sempre
vantaggiose, poiché il braccio br è
sempre minore del braccio bm e quindi la
forza resistente risulta sempre maggiore
della forza motrice.
Esempi di leve di 2° genere sono lo
schiaccianoci, lo spruzzetto lavavetri,
ecc.
bm
O
Fm
br
B
Fr
A
fulcro
Leve di 3ª specie
Si dicono leve di 3ª specie quelle in cui la
forza motrice è posto tra il fulcro e la forza
Fm
br
resistente.
Le leve di 3ª specie sono sempre
Fr
bm
svantaggiose, poiché il braccio bm è sempre O
B
minore del braccio br e quindi la forza
A
fulcro
resistente è sempre minore della forza
motrice.
Esempi di leve di 3° genere sono la
pinzetta per le ciglia, il braccio (quello che portiamo attaccato alla spalla), il mollettone per il
caminetto ecc.
Esempi di leve
10 – Statica dei corpi rigidi
Ins. Antonio Palladino
leve di 1° genere
FISICA - La Statica dei Corpi Rigidi
leve di 2° genere
11 – Statica dei corpi rigidi
leve di 3° genere
Ins. Antonio Palladino
FISICA - La Statica dei Corpi Rigidi
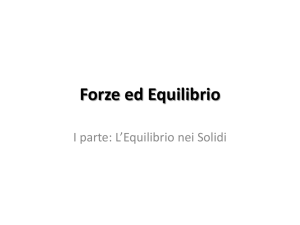
5b. Il piano inclinato
Come le leve, il piano inclinato è uno strumento che si può usare per equilibrare una forza con una
forza diversa. In particolare, il piano inclinato viene utilizzato per spostare oggetti ad altezze più
elevate mediante un cammino più “dolce” rispetto alla salita diretta lungo la direzione verticale.
Consideriamo un blocchetto rettangolare disposto in equilibrio su un piano inclinato di lunghezza l
ed altezza h. Supponiamo che tra il piano e il blocchetto non vi sia attrito. Se inoltre il blocchetto è
sufficientemente basso, la perpendicolare per il suo baricentro cade nella superficie di appoggio; in
tal caso il moto può essere solo di tipo traslatorio, poiché non vi possono essere ribaltamenti o
rotazioni .
Le forze che agiscono sul
blocchetto sono 3:
P esercitata dalla
FV
FE
a) la forza peso
Terra e diretta verso il basso,
b) la forza di reazione vincolare
G
FV ,
esercitata dal piano e
perpendicolare
al
piano
inclinato e
l
P
h
c) la
forza
equilibrante FE ,
esercitata da un filo e parallela al piano, la quale mantiene il blocchetto in equilibrio.
La condizione di equilibrio esige che le tre forze devono avere somma nulla. Per comprendere
P
come questo succede è utile scomporre la forza peso in due componenti, una, ORT , ortogonale al
P
piano inclinato e l’altra PAR , parallela ad
esso.
Vediamo l’analisi delle forze:
a) lungo la direzione perpendicolare al
PPAR
PORT
piano inclinato alla forza
si
oppone la forza di reazione
vincolare
annullano;
FV
PORT
e i loro effetti si
b) lungo la direzione parallela al piano inclinato alla forza
FE
FV
FE
PPAR
si oppone la forza equilibrante
esercitata dal filo e i loro effetti si annullano.
Mediante semplici considerazioni di carattere geometrico (similitudine dei triangoli) si ricava il
valore della forza equilibrante a partire dal peso del blocchetto e dai parametri del piano inclinato:
h
FE P·
l
Il piano inclinato ha allora l’effetto di far ridurre la forza di gravità, di un fattore pari alla
pendenza del piano stesso: quanto più il piano è inclinato, tanto più bassa è la sua pendenza e tanto
più leggera sarà la forza FE da applicare per tenere il corpo in equilibrio, o trascinarlo lungo la
pendenza.
Lavoro su un piano inclinato
12 – Statica dei corpi rigidi
Ins. Antonio Palladino
FISICA - La Statica dei Corpi Rigidi
Calcoliamo il lavoro fatto dalla forza FE contro la gravità per spostare un oggetto lungo tutto il
piano inclinato:
L FE ·s
la forza FE è data dall’espressione vista prima; lo spostamento s è ovviamente pari a l; quindi si
ha:
h
L mg· ·l P·h
l
Si deduce quindi che il lavoro compiuto è lo stesso che si compirebbe se il blocchetto venisse
sollevato lungo la direzione verticale. Il piano inclinato riduce l’entità della forza necessaria per
sollevare il corpo all’altezza h, e ci consente un vantaggio evidente, potendo applicare meno forza
di quella necessaria; l’altra faccia della medaglia è che dobbiamo applicare però la forza (ridotta)
per un percorso più lungo rispetto al sollevamento diretto. Alla fine l’energia spesa è la medesima.
FV
FE
F
G
l
P
13 – Statica dei corpi rigidi
G
h
P