Architetture VLSI per l’elaborazione digitale dei segnali
– Seconda Prova in Itinere – 30 gennaio 2008
Nome e Cognome
Una risposta corretta = + 1.5
Una risposta sbagliata “grave” = - 1.5
Una risposta sbagliata “meno grave” = - 0.75
Appunti e libri NON utilizzabili
Tempo a disposizione: 30’
Numero equivalente di domande corrette
Risultato Seconda Prova in Itinere Orale
LA MATITA E’ ILLEGALE
Architetture VLSI per l’elaborazione digitale dei segnali
Domanda 1
x1a
Seconda Prova in Itinere
2008 2009
Sinusoidi discrete nel tempo le cui pulsazioni angolari siano separate da un multiplo intero di 2 sono
identiche.
x2a Sinusoidi discrete nel tempo le cui frequenze f siano separate da un multiplo intero di sono identiche.
x3a
Sinusoidi discrete nel tempo le cui pulsazioni angolari siano separate da un multiplo intero di sono
identiche.
Domanda 2
2008 2009
La potenza associata all’errore di
quantizzazione
Domanda 3
x1a
diminuisce aumentando la frequenza di campionamento
x2a
diminuisce aumentando il numero di livelli di quantizzazione
x3a
diminuisce per ampiezze del segnale sufficientemente ridotte
2008 2009
Se il segnale in ingresso ad un quantizzatore
eccede il dynamic range di ingresso del
quantizzatore medesimo:
Domanda 4
x1a
si ha distorsione sul segnale in uscita
x2a
si aumenta il rapporto segnale/rumore in uscita
x3a
il segnale di uscita non subisce alcune effetto
2008 2009
x1a
Se il segnale in ingresso ad un quantizzatore occupa
x2a
metà del dynamic range di ingresso del
quantizzatore medesimo:
x3a
si ha distorsione sul segnale in uscita
si aumenta il rapporto segnale/rumore in uscita
si diminuisce il rapporto segnale/rumore in uscita
Riguardo alla domanda precedente sarebbe meglio farci un conto
Domanda 5
2008 2009
comporta sempre perdita di informazione
x1a
non comporta perdita di informazione se la banda del segnale di ingresso al
campionatore è compresa nell’intervallo [-Fs, Fs]
Il campionamento a x2a
frequenza Fs
non comporta perdita di informazione se la banda del segnale di ingresso al
campionatore è compresa nell’intervallo [-Fs/2, Fs/2]
x3a
Domanda 6
2008
x1a
In un convertitore a
sovracampionamento che opera x2a
a frequenza Fos, a parità di
quantizzatore
x3a
Domanda 7
diminuisce il rumore di quantizzazione nella banda di interesse del
segnale se il convertitore viene seguito da un filtro digitale opportuno
diminuisce il rumore di quantizzazione nella banda di interesse del
segnale se il convertitore viene preceduto da un filtro digitale opportuno
2009
L’utilizzo di un
convertitore a
sovracampionamento
Domanda 8
diminuisce il rumore di quantizzazione tra 0 e Fos/2
x1a
diminuisce la potenza associata all’errore di quantizzazione
x2a
distribuisce il rumore di quantizzazione su una banda di frequenze più elevata
x3a
aumenta la risoluzione del quantizzatore
2008 2009
L’utilizzo di un convertitore a
x1a
antialiasing analogico che precede il campionatore
Le risposte sbagliate comportano un decremento del punteggio.
Architetture VLSI per l’elaborazione digitale dei segnali
sovracampionamento permette di rilassare le
richieste sul filtro
Domanda 9
Seconda Prova in Itinere
x2a
antialiasing analogico che segue il campionatore
x3a
antialiasing digitale che segue il campionatore
2008 2009
Un sistema è chiamato statico
x1a
se la sua uscita in ogni istante dipende solo dagli ingressi correnti e
non dagli ingressi passati o futuri al sistema
x2a
se la sua uscita in ogni istante dipende dagli ingressi correnti e dagli
ingressi passati o futuri al sistema
x3a
se l’uscita è costante
Domanda 10 2008 2009
Considerando come
ingresso il segnale x(n) e
come uscita il segnale
y(n) il sistema in figura è
x(n)
y(n)=nx(n)
x1a
lineare e tempo variante
x2a
non lineare e tempo invariante
x3a
non lineare e tempo variante
n
Domanda 11 2008 2009
lineare e tempo variante
x(n)
y (n)=x(n-1)
z-1 e tempo invariante
x2a non lineare
x1a
Considerando come
ingresso il segnale x (n)
e come uscita il segnale
y(n) il sistema in figura è
x(n)
y (n)=x(n-1)
delay
x3a
lineare e tempo invariante
Domanda 12 2009
Considerando come
ingresso il segnale x(n) e
come uscita il segnale
y(n) il sistema in figura è
y(n)= x(n) cos0n
x(n)
cos0n
x1a
lineare e tempo variante
x2a
non lineare e tempo invariante
x3a
non lineare e tempo variante
Domanda 13 2008 2009
L’interconnessione di due sistemi in parallelo equivale a un unico sistema
T1
T = T1 + T2
y1(n)
x(n)
y(n)
T2
x1a
x2a sempre
x(n)
y2(n)
solo se i due sistemi sono
lineari e tempo invarianti
T = T1 + T2
y(n)
x3a
TP
solo se i due sistemi sono
lineari
Domanda 14 2008 2009
Per un sistema lineare tempo invariante la
risposta impulsiva è la risposta del sistema
x1a
ad un gradino di ampiezza unitaria
x2a
ad un impulso di ampiezza unitaria
x3a
ad un impulso di ampiezza infinita
Domanda 15 2008 2009
Un sistema lineare tempo invariante causale è BIBO (Bounded Input Bounded
Le risposte sbagliate comportano un decremento del punteggio.
x1a
lim h( n) 1
n
Architetture VLSI per l’elaborazione digitale dei segnali
Seconda Prova in Itinere
Output) stabile se vale per la sua risposta impulsiva
x2a
x3a
lim h(n) 0
n
lim h(n) 0
n0
Domanda 16 2008 2009
Condizione necessaria e sufficiente perché un
sistema causale lineare e tempo invariante sia
BIBO (Bounded Input Bounded Output) stabile
x1a
è che tutti gli zeri di H(z) siano all’interno del cerchio
di raggio unitario nel piano z.
x2a
è che tutti i poli e gli zeri di H(z) siano all’interno del
cerchio di raggio unitario nel piano z.
x3a
è che tutti i poli di H(z) siano all’interno del cerchio
di raggio unitario nel piano z.
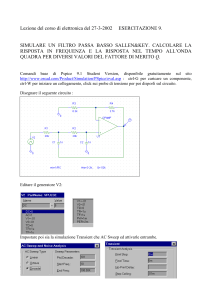
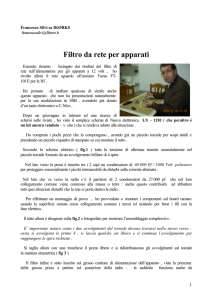
Domanda 17 2009
Date le posizioni degli zeri di un filtro FIR causale indicate in figura
piano z
x1a
il filtro è a fase non lineare
x2a
il filtro è a fase lineare
x3a
non si può dire nulla sulla fase
x1a
il filtro è a fase lineare
x2a
il filtro è a fase non lineare
x3a
non si può dire nulla sulla fase
cerchio di raggio
unitario
1/z*3
z3
1/z*2
z2
z4
z1
1/z1
z*2
z*3
1/z2
1/z3
Domanda 18 2008
Date le posizioni degli zeri di un filtro FIR causale indicate in figura
piano z
cerchio di raggio
unitario
1/z*3
z3
1/z*2
z2
z4
z1
1/z1
z*2
z*3
1/z2
1/z3
Domanda 19 2008 2009
Un sistema a ritardo puro
y(n) = x(n-k)
x1a
ha risposta in fase inversamente proporzionale alla frequenza
x2a
ha risposta in fase direttamente proporzionale alla frequenza
x3a
ha risposta in fase costante, indipendente dalla frequenza
Domanda 20 2009
Il sistema descritto dall’equazione
alle differenze
y ( n)
x1a
ha risposta in fase lineare
x2a
ha risposta in fase non lineare
1
1
y (n 2) x(n) x(n 1) x3a
4
4
non si può dire nulla riguardo alla linearità della risposta in fase
Domanda 21 2009
Le risposte sbagliate comportano un decremento del punteggio.
Architetture VLSI per l’elaborazione digitale dei segnali
Per un filtro passa basso, a parità di
ordine, frequenza di taglio e
frequenza di campionamento
Seconda Prova in Itinere
x1a
un filtro FIR è più selettivo di un IIR
x2a
un filtro IIR richiede sempre meno hardware di un filtro FIR
x3a
un filtro IIR è più selettivo di un FIR
Domanda 22 2008
Un filtro a media mobile
H ( z)
1 M k
z
M 1 k 0
x1a
ha M zeri
x2a
ha M zeri ed M poli
x3a
ha M+1 zeri e M poli
Domanda 23 (nuovo)
Il sistema descritto dall’equazione x1a
yn
1 M
xn k
M 1 k 0
ha risposta in fase che varia in modo non lineare con la frequenza
x2a
ha ritardo di gruppo che varia linearmente con la frequenza
x3a
ha risposta in fase che varia in modo lineare con la frequenza
Domanda 24 2009
Il sistema filtrante a media mobile x1a
descritto dall’equazione
1 M
yn
xn k
M 1 k 0
ha caratteristiche di selezione in frequenza di tipo passa alto
x2a
ha caratteristiche di selezione in frequenza di tipo passa banda
x3a
ha caratteristiche di selezione in frequenza di tipo passa basso
Domanda 25 2008 2009
Date le posizioni degli zeri di un filtro FIR causale indicate in figura
piano z
cerchio di raggio
unitario
x1a
il filtro è un filtro passa alto
x2a
il filtro un filtro passa basso
x3a
non si può dire nulla sul tipo di
filtro
x1a
il filtro è passa alto
x2a
il filtro è passa basso
x3a
il filtro è elimina banda
x1a
il filtro è un filtro passa basso
1/z*2
z2
z1
z*2
1/z2
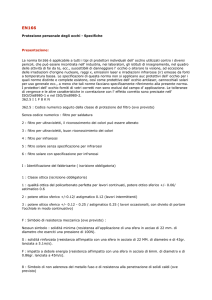
Domanda 26 new (alternativa alla precedente)
Date le posizioni degli zeri di un filtro FIR causale indicate in figura
piano z
z1
cerchio di raggio
unitario
z*1
Domanda 27 2009
Date le posizioni degli zeri di un filtro indicate in figura
Le risposte sbagliate comportano un decremento del punteggio.
Architetture VLSI per l’elaborazione digitale dei segnali
piano z
Seconda Prova in Itinere
cerchio di raggio
unitario
zz=0
x2a
il filtro un filtro passa alto
x3a
è un filtro passa banda
zp=0.8
Domanda 28 2008 2009
Date le posizioni dei poli e degli zeri di un filtro mostrate in figura
piano z
x1a
in filtro è in filtro FIR
x2a
il filtro un filtro IIR
x3a
non si può dire nulla sul tipo di filtro
cerchio di raggio
unitario
zp2
zz1
zp1
z*z1
z*p2
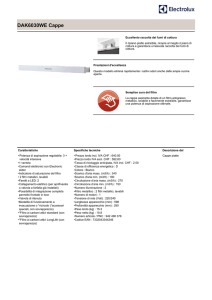
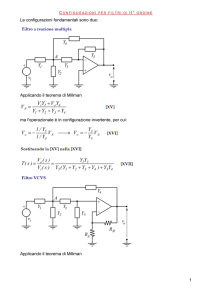
Domanda 29 2009
piano z
Aggiungere alle singolarità mostrate in figura le
singolarità necessarie affinché il sistema elimini
le frequenze nell’intorno a = fc/4 (dove fc è la
frequenza di clock del sistema digitale che
realizza la funzione di trasferimento)
cerchio di raggio
unitario
zp2
zp1
z*p2
Domanda 30 2008 2009
x1a
La quantizzazione dei coefficienti nei filtri FIR provoca uno
x2a
spostamento della posizione nel piano z
x3a
dei poli e degli zeri
dei poli
degli zeri
Domanda 31 2008 2009
La quantizzazione dei coefficienti nei filtri FIR a
fase lineare produce il seguente effetti
x1a
la fase diventa non lineare
x2a
il filtro diventa instabile
x3a
la frequenza di taglio viene modificata
Domanda 32 2008 2009
La quantizzazione dei coefficienti nei filtri IIR provoca uno
spostamento della posizione nel piano z
x1a
dei poli e degli zeri
x2a
dei poli
x3a
degli zeri
Domanda 33 2008 2009
I cicli limite in un sistema IIR sono provocati
dalla quantizzazione
x1a
dei coefficienti dei filtri
x2a
dei segnali in un punto qualsiasi del filtro
Le risposte sbagliate comportano un decremento del punteggio.
Architetture VLSI per l’elaborazione digitale dei segnali
x3a
Seconda Prova in Itinere
dei segnali all’interno dei rami di retroazione
Domanda 34 2008 2009
Il processo di decimazione richiede un filtro passa basso con
banda congruente con la frequenza di campionamento
Le risposte sbagliate comportano un decremento del punteggio.
x1a
di ingresso
x2a
di uscita
x3a
media delle due