Esercizio 1
Fare formula con polo sbagliato
Buono per le domande
Esercizio 2
Chiedere di fare ft che non rispetta Nyquist
Buono per le domande
Domande
Il sistema con impulsiva:
h(n) = { 1, -2, 3, 1, 7, 0, 5}
ha fase lineare
ha fase non lineare
il sistema è IIR, quindi ha sicuramente fase non lineare
Esercizio 3
Si indichi la condizione che rende periodica la sinusoide discreta nel tempo x(n) = A sin(2 f0 n)
f0 deve essere un numero razionale
f0 deve essere multiplo della frequenza di campionamento
f0 n deve essere intero
Esercizio 4
Sinusoidi discrete nel tempo le cui pulsazioni angolari siano separate da un multiplo intero di 2
sono identiche.
Sinusoidi discrete nel tempo le cui frequenze f siano separate da un multiplo intero di sono identiche.
Sinusoidi discrete nel tempo le cui pulsazioni angolari siano separate da un multiplo intero di sono
identiche.
Esercizio 5
L’oscillazione più alta in una sinusoide discreta nel tempo si ha con = (o = -).
L’oscillazione più alta in una sinusoide discreta nel tempo si ha con = 2 (o = -2).
L’oscillazione più alta in una sinusoide discreta nel tempo si ha con f = (o f = -).
Esercizio 6
Il campionamento non comporta mai perdita di informazione se il segnale ha banda finita.
Il campionamento comporta sempre una perdita di informazione
Il campionamento non comporta perdita di informazione, purché la frequenza di campionamento dia
sufficientemente alta.
Esercizio 7
Il processo di quantizzazione su un segnale campionato (tempo discreto) è reversibile, ma non lo è se
il segnale che viene quantizzato è continuo nel tempo.
Il processo di quantizzazione su un segnale campionato (tempo discreto) è reversibile, purché venga
rispettato il teorema di Nyquist.
Il processo di quantizzazione su un segnale campionato (tempo discreto) è reversibile, purché il
segnale sia a banda finita e venga rispettato il teorema di Nyquist.
Esercizio 8
La potenza associata al rumore di quantizzazione
Diminuisce aumentando la frequenza di campionamento
Diminuisce aumentando il numero di livelli di quantizzazione
Diminuisce per ampiezse del segnale sufficientemente ridotte
Esercizio 9
Il segnale in ingresso ad un quantizzatore
Può eccedere il dinamic range di ingresso del quantizzatore
Deve coincidere dinamic range di ingresso del quantizzatore
Deve essere compreso nel dinamic range di ingresso del quantizzatore
Esercizio 10
L’espressione
SQNR (dB ) 10 log 10 SQNR 1.76 6,02b con b = numero di bit equivalenti di un quantizzatore
vale
per segnali di ingresso al quantizzatore di tipo sinusoidale con frequenza che rispetti il teorema di
Nyquist
per segnali di ingresso che occupino l’intera banda del quantizzatore
per segnali di ingresso al quantizzatore di tipo sinusoidale con di manica pari al dinamic range di
ingresso del quantizzatore.
Esercizio 11
Se il segnale in ingresso ad un quantizzatore eccede il dinamic range di ingresso del quantizzatore
medesimo:
si ha distorsione sul segnale in uscita
si aumenta il rapporto segnale/rumore in uscita
il segnale di uscita non subisce alcune effetto
Esercizio 12
L’utilizzo di un convertitore a sovracampionamento
Permette di diminuire la potenza associata all’errore di quantizzazione
Permette di distribuire il rumore di quantizzazione su una banda di frequenze più elevata
Aumenta la risoluzine del quantizzatore
Esercizio 13
L’utilizzo di un convertitore a sovracampionamento
Permette di rilassare le richieste sul filtro antialiasing che precede il campionatore
Permette di rilassare le richieste sul filtro antialiasing che segue il campionatore
Permette di rilassare le richieste sul filtro decimatore che segue il campionatore
Esercizio 14
Il sistema caratterizzato dalla seguente descrizione ingresso-uscita
y (n) y (n 1) x(n)
è un sistema con memoria
Esercizio 15
Dati sue sistemi in cascata caratterizzati dalle funzioni y(n) = T2[y1(n)] = T2[T1[x(n)]]
Esercizio 16
Un sistema è chiamato statico
se la sua uscita in ogni istante dipende solo dagli ingressi correnti e non dagli ingressi passati o futuri
al sistema
se il sistema ha memoria
se l’uscita è costante
Esercizio 17
Il sistema in figura è
Lineare e tempo variante
Non Lineare e tempo invariante
Non lineare e tempo variante
x(n)
y(n)=nx(n)
n
Esercizio 18
Il sistema in figura è
Lineare e tempo variante
Non Lineare e tempo invariante
Non lineare e tempo variante
x(n)
y(n)= x(n) cos0n
cos0n
Esercizio 19
Per un sistema lineare tempo invariante la risposta impulsiva:
è la risposta del sistema ad un gradino di ampiezza unitaria
è la risposta del sistema ad un impulso di ampiezza unitaria
è la risposta del sistema ad un impulso di ampiezza infinita
Esercizio 20
Un sistema lineare tempo invariante causale
È stabile se vale per la sua risposta impulsiva
lim h(n) 0 lim h( n) 1 lim h( n) 1
n
n
n 0
Esercizio 21
o, equivalentemente:
In un sistema descritto dall’equazione alle differenze:
N
a k y (n k )
k 0
M
b
k x(n
k)
a0 1
k 0
In un sistema di questo tipo è necessario conoscere, oltre ad M ingressi consecutivi, anche il
valore di N uscite per poter computare correttamente la successiva evoluzione del sistema.
Esercizio 22
Stabilità
Condizione necessaria e sufficiente perché un sistema causale lineare e tempo invariante sia BIBO
stabile è che tutti i poli di H(z) siano all’interno del cerchio di raggio unitario nel piano z.
Condizione necessaria e sufficiente perché un sistema causale lineare e tempo invariante sia BIBO
stabile è che tutti gli zeri di H(z) siano all’interno del cerchio di raggio unitario nel piano z.
Condizione necessaria e sufficiente perché un sistema causale lineare e tempo invariante sia BIBO
stabile è che tutti i poli e gli zeri di H(z) siano all’interno del cerchio di raggio unitario nel piano z.
Esercizio 23
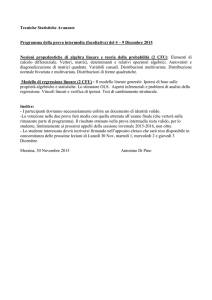
Date le posizioni degli zeri di un filtro FIR indicate in figura
piano z
cerchio di raggio
unitario
1/z*3
z3
1/z*2
z2
z4
z1
1/z1
z*2
z*3
1/z2
1/z3
in filtro è a fase lineare
il filtro è a fase non lineare
non si può dire nulla sulla fase
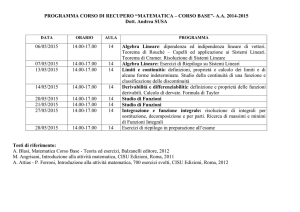
Esercizio 24
Poli filtro FIR
piano z
piano z
cerchio di raggio
unitario
1/z*3
1/z*3
z3
1/z*2
z2
z4
z1
z4
z1
z*2
z*3
z3
1/z*2
z2
1/z1
z*3
1/z*2
z2
1/z1
z4
z1
z*2
1/z2
cerchio di raggio
unitario
1/z*3
z3
1/z3
piano z
cerchio di raggio
unitario
1/z1
z*2
z*3
1/z2
1/z3
Esercizio 25
La Quantizzazione dei coefficienti nei filtri FIR provoca:
uno spostamento della posizione nel piano z dei poli e degli zeri
uno spostamento della posizione nel piano z dei poli
uno spostamento della posizione nel piano z degli zeri
1/z3
1/z2
Esercizio 26
La Quantizzazione dei coefficienti nei filtri IIR provoca:
uno spostamento della posizione nel piano z dei poli e degli zeri
uno spostamento della posizione nel piano z dei poli
uno spostamento della posizione nel piano z degli zeri
Esercizio 27
La quantizzazione dei segnali in un filtro
trasforma il sistema lineare in un sistema non lineare
trasforma il sistema lineare in un sistema non lineare
trasforma il sistema lineare in un sistema non lineare
Esercizio 28
I cicli limite in un sistema IIR sono provocati
Dalla quantizzazione dei coefficienti dei filtri
Dalla quantizzazione dei segnali in un punto qualsiasi del filtro
Dalla quantizzazione dei segnali all’interno dei ram di retroazione
Esercizio 29
Il processo di decimazione richiede
un filtro passa basso con banda congruente con la frequenza di ingresso
un filtro passa basso con banda congruente con la frequenza di uscita (frequenza decimata)
un filtro passa basso con banda congruente con la frequenza di uscita (frequenza decimata) + un
interruttore