Legge della Gravitazione Universale
m A mB
| F |= G 2
r
mB
mA
massa inerziale: mi
massa gravitazionale attiva e passiva ma, mp
m p = amI
(WEP)
m p = bm A
(Azione-Reazione)
mI = mA = mP
• m: massa che subisce la forza
• mi (da 1 a N): masse che
esercitano la forza
X
Xi
N
mi
( x ) G
i 1 X X i
Distribuzione continua r(x) teorema di Gauss
x
xi
se X X
( xi 0
'
(i 1,2,3),
r
x
2
i
i
1
X - X
1
x x
i
' 2
i
x3
x
x2
x1
,
xi x j
xi xi' 1
1
3 5 3 xi x j r 2 i j
r
r
2 i, j r
i
i
x
2
r xi )
i
Massa
Momento di Dipolo
(nullo se s.d.r. è centrato sul centro di massa)
Momento di Quadrupolo
(nullo per simmetrie sferiche)
Terra: Requat. e Rpolare differiscono di 1 parte su mille
Sole: Requat. e Rpolare differiscono di 1 parte su 105
Avanzamento del Perielio dei pianeti: Mercurio
Mercurio: 5600.73 ± 0.20’’ per secolo di cui
Effetto dovuto alla Relatività Generale: 43”
per secolo
Perturbazione dal moto dei pianeti: 532”
per secolo
Perturbazione dal momento di quadrupolo del sole:
pochi sec per secolo
Il resto e’ legato al s.d.r. astronomico solidale con la terra (5025’’)
Dj Sun ?
Dipende da suo momento di quadrupolo
Dicke e Goldberg (1961): misura dell’intensità della
radiazione solare sulla superficie
J = Q/2MR3 = 2 x 10-5 (errore al 10%)
Questo valore di J genererebbe un avanzamento del perielio pari a 3 sec arco per
secolo rendendo le osservazioni compatibili con la teoria di Brans-Dicke .
Hill e Stebbins (1975): Stessa tecnica – smentirono la misura
J = Q/2MR3 = 1 x 10-6 (errore al 400%)
Anni ’80: Misura delle oscillazioni solari
J = Q/2MR3 = 2 x 10-7 (errore al 10%)
Brown et al.(1989): Misura più accurata
J = Q/2MR3 = 1.5 x 10-7 (errore al 10%)
GM T
g=
2
RT
Scarsa accuratezza nella conoscenza
di masse e raggi dei pianeti
Cavendish Experiment
(1798)
E’ considerato il primo esperimento moderno !!!
Miglioramenti
1) Fibre di quarzo, Leve Ottiche (Boys, 1889)
2) Periodo invece che angoli (Heyl, 1942)
Accuratezza di qualche parte per mille
Source of the CODATA internationally recommended values
http://physics.nist.gov/cuu/Constants/bibliography.html
G
1) Misure di Proporzionalità tra Massa Attiva e Passiva : Saranno
discusse le due verifiche più importanti, dovute a Kreuzer e Bartlett-Van Buren
2) Misure di Unicità del Free Fall: Saranno discusse le principali tecniche
sperimentali per verificare l’unicità del Free Fall, con particolare attenzione al
funzionamento degli esperimenti con la bilancia di torsione.
3) Effetti di gravitazione Classica: le forze mareali
Materiale Didattico
TESTI FONDAMENTALI
1) UFF: D.V.Sivuchin, Fisica Generale per l’illustrazione della bilancia di torsione.
2) MASSA ATTIVA E PASSIVA: Leggere le idee fondamentali dei due esperimenti negli
articoli originali (non viene richiesta la conoscenza dettagliata). Gli articoli sono disponibili in rete.
Kreuzer L.B., 1968, “Experimental evidence of the equivalence of active and
passive gravitational mass”, Phys. Rev., 169, 1007
Bartellet D.F. and Van Buren D., 1986, “Equivalence of active and passive gravitational
mass using the moon”, Phys. Rev. Lett. 57, 21
TESINA POSSIBILE
Verifiche dell’UFF
ANALISI DELLE DISCREPANZE SULLE MISURE DI G CON PENDOLI DI TORSIONE
La misura di G si basa su misure di 1) Distanza 2) Peso 3) Costante di torsione del pendolo
Il risultato di G dipende dal valore mattiva della grande massa attraente. Valori di G diversi
ottenuti con masse di diversa natura possono essere interpretati come limite superiore alla
dipendenza di mattiva dalla composizione dei materiali.
Errore tipico
.0.002/6.67 ~ 3 10-4
Differenza tra i due valori di 0.007
Indicazione della presenza di un errore
sistematico o di un effetto di violazione?
L.B.Kreuzer, Phys. Rev., 169, nr.5 (1007-1012), 1968.
Set-up sperimentale
Generazione del segnale
Cilindro di Teflon (76% di Fluoro, 20 kg) immerso in una mistura di Triclorotilene e Dibromometano
(74% di Bromo).
Il cilindro traslato avanti e indietro nel contenitore grazie a un filo di nylon che lo traina, se la densità
tra liquido e solido è diversa si genera un segnale gravitazionale che dipende dalla posizione del
cilindro rispetto al liquido.
Sensore: Bilancia di torsione
Una torsione viene indotta sulla bilancia grazie alla diversa posizione del cilindro.
Lettura del segnale
Leva ottica: fascio laser riflesso indietro da uno specchietto solidale con il filo di sospensione della
bilancia (manubrio). Registrate variazioni dell’angolo a riposo.
La strategia di misura
1) Bilancia di torsione
2) Misura di zero: variando la temperatura del sistema liquido+solido si può ottenere
rsolido=rliquido per cui DF=0 a cui corrisponde DQbilancia=0 se non ci sono violazioni.
3) I segnali devono dipendere direttamente dalle differenze di massa per ridurre l’errore.
4) Materiali sono scelti per
• densità simili
• masse chimicamente inerti e omogenee
• evidenziare le violazioni sull’equivalenza tra mi e mp possono essere legate alle diverse
composizioni nucleari (E/A) e (Z/A) tra solido (76% dii Fluoro) e liquido (74% di Bromo).
1.
2.
3.
1.
2.
3.
I Segnali
La forza d’attrazione gravitazionale è proporzionale alla differenza di massa attiva tra fluido
e solido;
La differenza di densità misura la differenza di massa passiva tra fluido e solido (La densità è
data da misure di massa nel campo terrestre.)
Quando la differenza di densità è zero si deve avere segnale nullo. Un eventuale segnale
residuo pone un limite superiore sulla differenza percentuale tra massa passiva e attiva.
Il Metodo ed il suo Limite
Rivelazione sincrona al moto del cilindro vibrazioni indotte sul sistema
Misura della temperatura per monitorare la densità, essendo noti i coefficienti di
dilatazione del solido e del liquido dati da tabelle
Errore sistematico: rfilo di nylon che trascina il corpo diversa da rTeflon
Dm
£ 5 ×10 -5
m
L’errore Dy nel punto dell’intersezione
definisce il limite superiore
Densità uguali
r
2
X1 - X 2
mI 1a1 = -GmP1mA2
= F1
3
| X1 - X 2 |
X 2 - X1
mI 2 a2 = -GmP 2 mA1
= F2
3
| X 2 - X1 |
1
3a Legge della dinamica: Ad ogni
azione corrisponde una reazione uguale
e contraria
mP1mA2 = mP 2 mA1
| F1 |=| F2 |
mP1 mP 2
=
m A1 m A2
Crosta ricca di
Alluminio
(ra 2350 kg/m3 )
dOC = 10 km
Mantello ricco
di Ferro,
(rb 3350 kg/m3 )
D.F.Bartlett & D.Van Buren, Phys. Rev. Lett.,
57, nr.1 (21-24), 1986.
Se la forza gravitazionale esercitata dal mantello sulla
crosta fosse diversa da quella esercitata dalla crosta sul
mantello (violazione del principio d’azione e reazione)
esisterebbe una forza residua sul Centro di Massa che
determinerebbe una deviazione dall’orbita classica legata
al parametro:
æ ma(a) mb(a) ö
S(a, b) = ç ( p) - ( p) ÷
mb ø
è ma
Metodo
Lunar Laser Ranging Accuratezze dell’ordine del cm nella misura dell’orbita
Limite concettuale
Modelli Accurati composizione Lunare
Il rapporto tra mattiva / mpassiva è lo stesso per Fe ed Al
con un accuratezza di una parte su 1012
•
•
•
•
•
•
•
Forza della crosta sul mantello
Dal teorema di Gauss (=-4pGM)
4
Fab = - p Gra rbtVb k̂
3
B posizione centro di massa
O centro geometrico
Indice a crosta
Indice b mantello
OB=s=zcm
OC=t=zmantello
a raggio della crosta
Fab =
òr
f dVb
b b
4
fb = - p Gra z k̂
3
Diretta come OC
Violando il 3o principio si ha
(a)
(a) ö
æ
4
r
r
Fab - Fba = - p GtVb rb( p) ra( p) ç a( p) - b( p) ÷ k̂ =
3
rb ø
è ra
(a)
(a) ö
æ
4
m
m
= - p GtVb rb( p) ra( p) ç a( p) - b( p) ÷ k̂
3
mb ø
è ma
4
Fs = - p GtVb rb ra S(a, b)k̂ = S(a, b)Fb
3
Centro di massa della luna
Che determina una variazione della velocità angolare orbitale
Forza Terra-Luna
Fs
@ 5S(a, b)
FMoon
r=385000 km raggio orbita
a=3470 km raggio crosta
Misure di Lunar Laser Ranging
d dt secondi d'arco/secolo
Valutazione dalle misure con il satellite LAGEOS dell’effetto
delle maree oceaniche sul moto lunare
d dt 5 secondi d'arco/secolo
Supponendo che lo scarto sia attribuibile agli effetti di violazione:
D/ < 1.10-12 /mese
S(a,b) < (1/5) (1/6 p)(1/sin14o ) 1.10-12=5.10-14
Tenendo conto della frazione di composizione di Fe e Al
(fattore 0.08)
S(Al,Fe)= S(a,b)/0.08 = 7.10-13
se mp diversa da ma violazione della
conservazione dell’impulso
La RG si basa su mp=ma
• In questi studi non si tiene conto degli effetti di ritardo dell’interazione gravitazionale
tra i due corpi che sono importanti quando non è più verificata la condizione v/c << 1.
• La conservazione dell’impulso è riformulata in regime relativistico in termini di
conservazione del quadri-impulso.
• In condizioni relativistiche il sistema a due corpi deve tener conto del campo
d’interazione gravitazionale che si propaga in un tempo finito dall’una all’altra
particella. Il campo ha anch’esso associato un impulso (ed un’energia) di cui occorre
tener conto.
Una trattazione rigorosa delle leggi fondamentali della Gravitazione e del complesso problema
associato alla conservazione del quadri-impulso nell’ambito della Relatività Generale, è riportata nel
capitolo 11 del testo C. Moller, The Theory of Relativity, Claredon Press Oxford 1972.
..
mI l 2 q = -mp g × l sinq » -mp g × lq
q
l
mp g
q »×q
mI l
..
mPg sinq
T=
mp g
w »
mI l
mPg
2p
w
= 2p
mI l
mP g
Se il rapporto fosse diverso
da corpo a corpo il periodo
cambierebbe a seconda
del tipo di pendolo
Ideato da Newton (1642-1727)
Bessel (1784-1846)
q
Il rapporto è lo
stesso per tutti i corpi esaminati
con un’accuratezza di una
parte su 60.000
l
mPg sinq
mPg
Si può usare il pendolo per ricavare
informazioni sull'attrazione gravitazionale in
un particolare luogo. Questo tipo di misura
era servita proprio per verificare la legge di
gravitazione universale: le osservazioni
venivano eseguite al livello del mare e su
una montagna per vedere se l'accelerazione
di gravità diminuiva come previsto da
Newton.
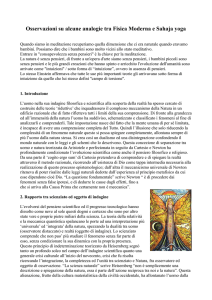
Esperimenti sul principio di equivalenza e precisioni ottenute
Simon Stevin
Galileo Galilei
Isaac Newton
Friedrich Wilhelm Bessel
Southerns
Zeeman
Loránd Eötvös
Potter
Renner
Dicke, Roll, Krotkov
Braginsky, Panov
Shapiro
Keiser, Faller
Niebauer, et al.
Heckel, et al.
Adelberger, et al.
Baeßler, et al.
Adelberger, et al.
Adelberger, et al.
1585
1590
1686
1832
1910
1918
1909
1923
1935
1964
1972
1976
1981
1987
1989
1990
1999
2006
2008
Drop Tower
Pendolo, Drop Tower
Pendolo
Pendolo
Pendolo
Bilancia di torsione
Bilancia di torsione
Pendolo
Bilancia di torsione
Bilancia di torsione
Bilancia di torsione
Lunar Laser Ranging
Supporto fluido
Drop Tower
Bilancia di torsione
Bilancia di torsione
Bilancia di torsione
Bilancia di torsione
Bilancia di torsione
5x10-2
2x10-2
10-3
2x10-5
5x10-6
3x10-8
5x10-9
3x10-6
2x10-9
3x10-11
10-12
10-12
4x10-11
10-10
10-11
10-12
5x10-13
10-13
3x10-14
Fgrav=g mP
FCentrifuga = mIw r =
2
r
mIw RT cosQ
2
q
RT
r
Deviazione del filo
a piombo
q
RT
Se il rapporto variasse la deviazione
dipenderebbe dal corpo utilizzato
come massa del filo a piombo
r
Deviazione del filo
a piombo
q
RT
a =1.7 x 10-3 a 450 di latitudine
• FG=- mg g vers(z)
• Fc = mi ax vers(x)+mi az vers(z)
| FCentrifuga |= mIw 2r
q
r
centrifuga
z
F
= mIw r cosq
2
z
2
l
l’
La componente verticale
della forza centrifiga
è bilanciata dalla forza di gravità
Equilibrio della bilancia
lungo l’asse verticale:
Equilibrio dei pesi
Torsione attorno all’asse orizzontale
z
m I 2w 2r cosq ẑ
S
l
l’
2
Torsione attorno all’asse verticale
l'equazione del momento di torsione sarà:
l=l’
Se i due corpi avessero rapporti diversi
tra massa
inerziale
e dunque ne segue che un momento torcente (torque)
esiste se
e solo see gravitazionale
passiva, la relazione di equilibrio
potrebbe essere verificata solo se le due
masse inerziali fossero diverse.
l
Questo implicherebbe però che le due forze
centrifughe sarebbero diverse e quindi le diverse
Nella posizione di equilibrio questo torque sarà compensato dal torque generato dal filo di
componenti orizzontali indurrebbero una
sospensione.
torsione intorno all’asse verticale
L'utilizzo della bilancia di torsione introdotta da Eötvös ha così aperto la strada a una serie
l 2
M z = (mI 1 - mI 2 ) w r sin q
2
Rotazione intorno
all’asse verticale
l
kjj = M z
Parametro di Eotvos
q
r
2 a1 - a2
h=
a1 + a2
z
N
l
2
S
Ruotando il sistema di 1800
si dovrebbe invertire il segno del momento
e si otterrebbe una rotazione dalla parte opposta
N
l
2
S
hEotvos =10
-8
I risultati nulli ottenuti da Eotvos ci dicono che il rapporto
tra massa inerziale e massa gravitazionale è lo stesso per tutti
i corpi a meno di qualche parte per miliardo
N
l
2
S