Parte I (Sensori)
Stima sperimentale dei parametri in regime statico
Se si vogliono stimare i parametri di un
sensore in regime statico occorre disporre
di un segnale in ingresso campione che
viene fatto variare opportunamente.
Inoltre, spesso, una data misura non
viene ripetuta: si eseguono due sole
misure, una per valori crescenti del
misurando e una per valori decrescenti.
Si suppone che il valore del misurando
non altera le caratteristiche statistiche dei
residui!
Nel
caso
di
un
misuratore,
i
dati
potrebbero
essere
quelli
riportati
in
tabella.
Pressione di
riferimento
kPa
0.000
1.000
2.000
3.000
4.000
5.000
6.000
7.000
8.000
9.000
10.000
Pressione misurata
valori crescenti
-1.12
0.21
1.18
2.09
3.33
4.50
5.26
6.59
7.73
8.68
9.80
valori decrescenti
-0.69
0.42
1.65
2.48
3.62
4.71
5.87
6.89
7.92
9.10 1
10.20
Parte I (I sensori)
Stima sperimentale dei parametri in regime statico
In genere, si suppone che la curva di
calibrazione sia una retta. Essa dovrà
approssimare i dati reali nel miglior modo
possibile, secondo un opportuno criterio. In
genere si utilizza il metodo dei minimi
quadrati; esso minimizza la somma dei
quadrati degli scarti verticali tra dati reali e
curva interpolante.
L’equazione della retta interpolante ha la
forma:
q0 m qi b
essendo:
q0
qi
m
b
la variabile dipendente
la variabile indipendente
la pendenza della curva
l’intercetta con l’asse verticale.
2
Parte I (I sensori)
Stima sperimentale dei parametri in regime statico
I parametri m e b vengono determinati
minimizzando un opportuno funzionale
costo. Ovvero imponendo che siano nulle le
due derivate parziali rispetto a m e a b.
Valgono le seguenti relazioni:
q q
m
N q q
q q q q q
b
N q q
N qi qo
i
2
2
i
2
i
o
i
o
i
2
i
o
i
2
i
essendo N il numero di coppie di misure
disponibili.
3
Parte I (I sensori)
Stima sperimentale dei parametri in regime statico
La quantità:
2
qo
s
1
2
mqi b qo
n
rappresenta la deviazione standard di q0.
Ovvero, il valore della deviazione standard
ottenuta, supponendo che l’ingresso fosse
mantenuto costante e si fosse fatta una
serie di letture, nelle stesse condizioni
sperimentali.
4
Parte I (I sensori)
Stima sperimentale dei parametri in regime statico
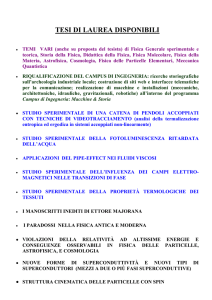
Nel caso del sistema per la misura di pressione si
ottengono i seguenti valori:
m = 1,08
b = -0,85 Kpa
sqo = 0.20 Kpa, sm = 0,0134 sb = 0.078 kPa
Se si assume per tali parametri una distribuzione di
tipo gaussiano e si prende in considerazione il limite a
99.7% (± 3s), si possono dare per i parametri le
seguenti stime:
m = 1,08 ± 0.04 b = -0,85 ± 0,24 kPa
Nel
caso
del
nostro misuratore
di pressione, si
ottiene il grafico
riportato
5
Parte I (I sensori)
Stima sperimentale dei parametri in regime statico
Nelle situazioni reali la grandezza nota è q0 e
si vuole avere una stima della grandezza in
ingresso In tale caso è necessario invertire
l’equazione utilizzata per la determinazione
dei parametri. La corrispondente deviazione
standard viene data dalla formula:
1
qo b
s
qi 2
m
n
m
2
2
qi
sq2i
Applicando tale relazione al
nostro misuratore di pressione si
ottiene sqi = 0.18kPa.
6
Parte I (I sensori)
Stima sperimentale dei parametri in regime statico
Spesso i limiti dell’errore sono dati in termini
di di errore probabile ep. Esso è definito
come:
ep = 0,674 s
L’intervallo ±ep contiene il 50% dei valori.
Il procedimento di taratura descritto
permette di distinguere tra bias e
imprecisone. Il bias è il termine che può
essere rimosso, dopo la procedura di
calibrazione.
Si può quindi definire la
taratura come il processo che
permette di rimuovere il bias e
di definire quantitativamente
7
l’imprecisione!
Parte I (I sensori)
Stima sperimentale dei parametri in regime statico
Si consideri una relazione lineare del tipo :
y k x i k i
i
ovvero, in forma matriciale :
y k x k
se si indica con il vettore dei parametri stimati, le
corrispondenti stime della y, saranno :
ŷ k x k ˆ .
Mentre l’errore assume la forma :
e k y k y k .
Il metodo dei minimi quadrati minimizza la somma dei
quadrati degli errori :
J ˆ e2 k eT e
y ŷ
T
T
ˆ
y ŷ y x y xˆ
y T y y T xˆ ˆ T xT y ˆ T xT xˆ
y y 2ˆ T xT y ˆ T xT xˆ
T
8
Parte I (I sensori)
Stima sperimentale dei parametri in regime statico
Per avere un estremo del funzionale deve essere :
T
J
T T
T
T T
2 x y x x
x x
2 y T x 2 T xT x 0
ovvero :
1 T
T
ˆ x x x y
ˆT
T
T
y x x x
1
.
9
Parte I (I sensori)
Stima sperimentale dei parametri in regime statico
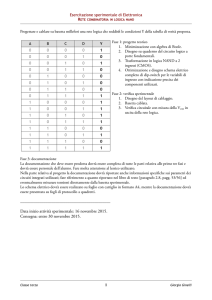
Si supponga di avere un sistema retto
dall’equazione non lineare in x1 e x2 :
y 3 sen x1 2 x22
for i=1:201,
for j=1:63;
y(i,j)=3*sin(x1(i))+2*x2(j)^2;
end
end
10
Parte I (I sensori)
Stima sperimentale dei parametri in regime statico
L’uscita assume il seguente andamento:
mesh(y)
Aggiungiamo quindi del rumore:
yr=y+.2*(rand(601,63)-.5);
11
Parte I (I sensori)
Stima sperimentale dei parametri in regime statico
Per poter applicare il metodo dei
minimi quadrati è necessario
costruire organizzare
opportunamente i dati
for i=1:201,
for j=1:63,
yrv((i-1)*201+j)=yr(i,j);
uv((i-1)*201+j,1)=sin(x1(i));
uv((i-1)*201+j,2)=(x2(j)^2);
end
end
Si può quindi procedere alla stima dei
parametri
par=inv(uv'*uv)*uv'*yrv
par =
3.0009
1.9981
12
Parte I (I sensori)
Stima sperimentale dei parametri in regime statico
E’ possibile quindi procedere alla
simulazione dell’uscita del sistema:
for i=1:201,
for j=1:63;
ys(i,j)=par(1)*sin(x1(i))+par(2)*x2(j)^2;
end
end
E’ possibile stimare anche l’errore:
mesh(yr-ys)
13
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Per
determinare
le
caratteristiche
dinamiche di un sensore, per via
sperimentale, occorre adottare strategie
diverse, in accordo con l’ordine del
sistema. I casi più comuni sono:
•Sistema di ordine zero;
•Sistema del primo ordine;
•Sistema del secondo ordine.
14
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema di ordine zero
Per i sistemi di ordine zero la risposta a una
sollecitazione in ingresso è istantanea e
l’unico parametro dinamico coincide con
la sensibilità (si ricordi che stiamo
supponendo che il sistema sia lineare).
Questa è stata determinata durante la
fase di caratterizzazione statica.
15
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del primo ordine
Per i sistemi del primo ordine occorre
determinare la sensibilità k e la costante di
tempo .
La sensibilità viene determinata mediante
la calibrazione statica del dispositivo;
E’ possibile stimare la costante di tempo
determinando l’istante di tempo in cui la
risposta al gradino raggiunge il 63.2% del
valore di regime. Tale metodo tuttavia
risente dell’incertezza nella determinazione
dell’istante t=0 e non consente in ogni caso
di verificare se il sistema è realmente del
primo ordine.
16
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del primo ordine
Si preferisce, pertanto, analizzare i dati
della risposta al gradino in forma
semilogaritmica. Si ha, infatti:
y kx 1 e t /
y kx
e t /
kx
y
1 e t /
kx
E definendo la quantità:
Si ha:
y
t
Z log e 1
kx
dZ
1
dt
17
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del primo ordine
Quindi riportando Z come grafico di t, si
ottiene una linea retta, la cui pendenza è
proprio -1/. La stima della costante di
tempo risulta più accurata perché basata
sull’uso di tutti i punti disponibili. Inoltre, se i
dati sperimentali sono prossimi a una retta
si ha la certezza che il sistema è proprio del
primo ordine…..
18
Parte I (I sensori)
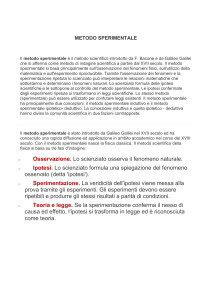
Stima sperimentale dei parametri in regime dinamico
Sistema del primo ordine
y kx 1 e
t /
.....
t=.01:.01:10;
y=5*(1-exp(-t./.3));
plot(t,y)
19
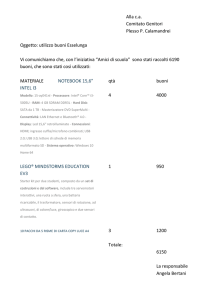
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del primo ordine
y
t
.....Z log e 1 ....
kx
Z=log(1-y/5);
plot(t,Z)
polyfit(t,Z,1)
ans =
-3.3334
0.0001
>> 1/ans(1)
ans =
-0.3000
20
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del primo ordine
Una verifica ancora più forte si può
ottenere operando nel dominio della
frequenza:
•Si sollecita il sistema con un segnale
sinusoidale
a
frequenza
lentamente
variabile;
•Si tracciano i diagrammi del modulo e
della fase, in scala semilogaritmica;
Se il sistema è realmente del primo ordine il
diagramma dei moduli avrà il classico
andamento di un filtro passa basso, con
pendenza
del
diagramma
di
20
dB/decade ad alte frequenze e il
digramma
delle
fasi
tenderà
asintoticamente a -90°.
21
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del primo ordine
Se il sistema è realmente del primo ordine il
diagramma dei moduli avrà il classico
andamento di un filtro passa basso, con
pendenza
del
diagramma
di
20
dB/decade ad alte frequenze e il
digramma
delle
fasi
tenderà
asintoticamente a -90°.
I diagrammi asintotici permetteranno,
inoltre, di determinare il valore della
22
costante di tempo 1/wbreak=1/2pfbreak.
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del secondo ordine
Si consideri un sistema del secondo ordine.
Per esso si può sempre scrivere:
2
d qo
dqo
a2
a1
a0 qo bo qi
2
dt
dt
bo
ao
a1
K ; wn
;
ao
a2
2 a0 a 2
qo
K
s 2 2
qi
s / wn 2s / wn 1
infatti….
23
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
….infatti, si consideri il seguente sistema massa
molla:
forze
ma
dxo
d 2 xo
fi B
K s xo M
dt
dt 2
Ms 2 Bs K s xo f i
xo
1/ Ks
1
s
fi
Ms 2 Bs K s
s 2 M / K s sB / K s 1
1
K
Ks
m / N ;
M
1
2
Ks
wn
B
2
;
Ks
wn
s ;
1
Bw n
B
;
2K s
2K s
Ks
B 24
M
2 KsM
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del secondo ordine
La sensibilità può ancora essere stimata
durante il processo di calibrazione statica.
Gli altri parametri vengono determinati
invece con metodi diversi in accordo con il
valore del coefficiente di smorzamento (cfr.
sistemi sottosmorzati e sistemi sovrasmorzati).
Nel caso di un sistema sottosmorzato si ha:
qo
e w nt
sin 1 2 w nt 1
Kqi
1 2
arcsin 1 2
25
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
….e il massimo della risposta vale:
qoMAX
A1 e
p
1
2
p
a qoMAX A Ae
1
2
2
1
2
;
log e
p2
a
log e
A
2
p
2
1
2
1;
log e a
A
2
p
a
A
1
2
;
;
1
2
p
1
2
a
log e
A
Abbiamo cosi determinato, dai dati
sperimentali il valore del coefficiente
di smorzamento.
26
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Per determinare la pulsazione wn, basta
determinare due passaggi successivi per lo
zero della parte periodica della risposta:
sin
1
2
wn t 0;
1 2 wn t kp ;
1 2 wn t T k 2 p
1 2 wnT 2p ;
1 2 wn t kp ;
1 2 wn t T k 2 p
wn
2p
1 2T
Abbiamo cosi determinato, dai dati
sperimentali il valore della pulsazione.
NB:la stima risulterà più accurata se
si considerano N cicli.
27
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del secondo ordine
Nel caso di sistemi sovrasmorzati conviene
riscrivere la risposta come:
qo
1
2
t / 1
e
e t / 2 1;
Kqi 2 1
2 1
1 2
28
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del secondo ordine
Definiamo:
qo
100
R pi 1
Kqi
Se il sistema è del secondo ordine e si
traccia Rpi in scala semilogaritmica si ottiene
per valori grandi di t, una retta,
29
Infatti….
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del secondo ordine
…infatti…
2
1
t / 1
t / 2
R pi 100
e
e
2 1
2 1
e per t sufficientemente grande si ha :
2
t / 1
R pi 100
e
2 1
Che in scala semilogaritmica è una retta.
1) Indichiamo con P1 il punto in cui tale
asintoto incontra l’asse di Rpi. Si ha, inoltre:
1
R pi 1 100
1 2
1
0.368R pi 0
e
30
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
2) Sottraiamo dalla retta Rpi, ciò corrisponde
ad isolare il contributo del secondo
esponenziale. In scala semilogaritmica
dovremo quindi ottenere una seconda retta.
Il valore iniziale di tale contributo sarà
individuato dal punto
P2 P1 100
e per t 2 sarà
0.368P2 0.368P1 100
31
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del secondo ordine
E’ possibile individuare i parametri del
sistema anche utilizzando la risposta in
frequenza (sistema sottosmorzato):
32
Parte I (I sensori)
Stima sperimentale dei parametri in regime dinamico
Sistema del secondo ordine
E’ possibile individuare i parametri del
sistema utilizzando la risposta in frequenza
(sistema sovrasmorzato):
NB: le informazioni sono state ottenute
utilizzando esclusivamente il diagramma dei
moduli. Se è disponibile anche il diagramma
delle fasi è possibile avere un’ulteriore
verifica del valore dei parametri stimati.
33