GEOMETRIA EUCLIDEA
CONCETTI FONDAMENTALI
Presentazione a cura
della Prof. ssa
Annunziata Di Biase
Novembre 2014
NOTIZIE STORICHE
La parola GEOMETRIA deriva dal greco e significa “MISURA
DELLA TERRA”
Furono TALETE di Mileto e PITAGORA di Samo ad introdurre
in Grecia le conoscenze geometriche di egiziani e babilonesi.
Ma nel III secolo a. C. fu il matematico EUCLIDE di
Alessandria in Egitto, a dare una struttura razionale alle
conoscenze geometriche note sino ad allora scrivendo una
delle più grandi opere della cultura occidentale, gli
“Elementi” . Questa grande opera è organizzata in 13 libri.
Essa prese il posto di tutti i libri precedenti sulla geometria
e viene chiamata “GEOMETRIA EUCLIDEA”.
DALLA GEOMETRIA INTUITIVA (degli antichi Egizi studiata nelle
scuole elementari e medie)
ALLA GEOMETRIA RAZIONALE (degli antichi Greci studiata nelle
scuole superiori)
Geometria intuitiva: studia le proprietà delle “figure reali” basandosi
sull’intuito, osservazione e sulle esperienze che ce ne danno i nostri sensi e
non sul ragionamento.
INTUITIVA
Si basa su
OSSERVAZIONI
PROVE
TENTATIVI
ESPERIENZE
Geometria razionale: si studiano le proprietà di “figure ideali” basandosi
sull’intuito, ma principalmente sul ragionamento.
RAZIONALE
Parte da
ENTI e CONCETTI
PRIMITIVI
Non definibili, ma
descritti mediante
ASSIOMI o POSTULATI
Concetti fondamentali
Concetti e enti primitivi: In geometria i concetti primitivi non si
possono definire esplicitamente, ma possono essere definiti
implicitamente attraverso degli assiomi.
Ente: ciò che esiste.
Grandezza: ciò che si può misurare.
Definizione: una frase nella quale si assegna un nome a un ente e
se ne elencano le proprietà o caratteristiche.
Assiomi o postulati: Affermazioni che esprimono delle proprietà
evidenti, suggerite dalla nostra intuizione e dalla nostra
esperienza. Sono proprietà che “supponiamo” essere vere a
priori e che pertanto non dimostriamo.
Gli assiomi scelti devono soddisfare le seguenti condizioni:
1. COMPATIBILITA’: non devono contraddirsi l’uno con l’altro
2. INDIPENDENZA : dalle proprietà affermate dell’uno non si devono poter
dedurre le proprietà affermate dell’altro
Teorema: è una proposizione dimostrabile, cioè a differenza dell’assioma
non è vera a priori, ma occorre dimostrare la sua veridicità attraverso un
ragionamento logico.
Lemma: è un teorema che non ha una grande importanza di per sé, ma che
è particolarmente utile per la dimostrazione di altri teoremi. Esso precede
un altro teorema chiamato teorema principale e serve a semplificarne la
dimostrazione. In geometria si trovano pochissimi lemma.
Corollario: è un teorema importante che segue alcuni teoremi ed è una
proposizione che risulta essere una conseguenza immediata di un altro
teorema o di un postulato.
CONCETTI ED ENTI PRIMITIVI
Non si possono definire con idee più elementari e sono espressi
da parole il cui significato è noto a tutti. Non abbiamo bisogno di
definirli.
Sono CONCETTI PRIMITIVI:
MOVIMENTO RIGIDO,
2. APPARTENENZA
1.
SONO ENTI PRIMITIVI:
1. PUNTO, 2. RETTA, 3. PIANO, 4. SPAZIO
Enti geometrici primitivi
Gli enti primitivi della geometria sono:
PUNTO
RETTA
PIANO
SPAZIO
PUNTO
Il punto è un ente geometrico fondamentale privo di
dimensioni.
Un punto nella geometria euclidea poiché non ha dimensione
(adimensionale) non è una grandezza, rappresenta solo una
posizione nello spazio. Esso si indica con le lettere maiuscole
dell’alfabeto latino.
B
A
C
RETTA
Infiniti punti allineati determinano una retta. La retta è una
grandezza ed è caratterizzata da una sola dimensione: la lunghezza
(L). Le rette si indicano con le lettere minuscole dell’alfabeto
latino.
Per modello di retta possiamo prendere in considerazione un filo
teso fra due punti. Un modello migliore può essere preso un raggio
luminoso che rispetto al precedente ha il pregio di avere
dimensioni decisamente più ridotte.
PIANO
Infiniti punti e infinite rette determinano un piano. Il piano è caratterizzato
da due dimensioni: lunghezza (L) e larghezza (L)
LxL=S
Si indica con una lettera dell’alfabeto greco minuscola.
Come modello di piano possiamo prendere un foglio di carta. Per
rappresentarlo possiamo utilizzare un parallelogramma e per convenzione
si utilizza, per indicarlo, una lettera dell’alfabeto greco minuscola.
lunghezza
SPAZIO
Infiniti punti, infinite rette e infiniti piani determinano lo spazio.
Gli enti geometrici sono tutti situati nello spazio.
Lo spazio è caratterizzato da tre dimensioni: lunghezza (L),
larghezza (L) e altezza (L).
LxLxL=V
Punti coincidenti
B
A≡
Punto A
coincide con
B
A≡B
Per indicare che due punti
coincidono si usa il simbolo ≡
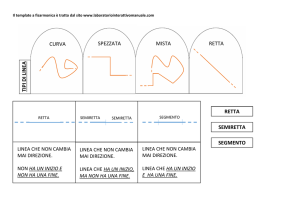
La linea retta
Rette COMPLANARI: se esiste un piano che le contiene entrambe.
Rette INCIDENTI: rette complanari che hanno un punto in comune
Rette PARALLELE: rette complanari che non hanno nessun punto in
comune o che hanno tutti i punti in comune
Rette SGHEMBE: se non sono complanari, e di conseguenza non
hanno punti in comune né sono parallele.
Assiomi fondamentali
- Una retta contiene infiniti punti
- Un piano contiene infiniti punti e infinite rette
- Lo spazio contiene infiniti punti, infinite rette, infiniti piani
Assiomi di appartenenza
Per due punti distinti passa una ed una sola retta (= due punti distinti
appartengono a una sola retta)
Per tre punti non allineati passa uno e un solo piano (= tre punti non allineati
appartengono a un solo piano)
La retta passante per due punti distinti di un piano giace completamente sul
piano
Assioma di ordinamento
-La retta è un insieme di punti totalmente ordinato, tale che:
- Dati due punti A e B, o A precede B o B precede A.
A
B
- Se A precede B e B precede C, allora A precede C.
A
B
C
Retta e punto
Consideriamo una retta r e un punto P su di essa
Se la retta è formata da un numero infinito ed
illimitato di punti allora un suo generico punto P
la divide in due parti
Si viene a formare un nuovo ente che si chiama
semiretta.
SEMIRETTA: ciascuna delle parti in cui una retta è divisa da un suo
punto.
Il punto è detto: ORIGINE delle semirette
Due semirette si dicono OPPOSTE o adiacenti se:
• hanno solo l’origine in comune
• appartengono alla stessa retta
Semiretta
Caratteristiche della semiretta
La semiretta ha un punto di inizio che ne rappresenta l’origine e un verso
che rappresenta la direzione verso la quale si estende la semiretta.
Due o più semirette che hanno un’origine in comune condividono la stessa
origine.
Il modello di semiretta è rappresentato da un laser.
r
P
verso
semiretta
t
s
H
r
k
Semirette con origine in comune
Retta e punto
Per un punto
passano infinite rette
Il punto per cui passano
le rette è detto
centro del fascio
Le infinite rette che passano
per un punto costituiscono
un fascio proprio di rette
Fascio PROPRIO di rette: rette complanari passanti per uno stesso
punto detto centro del fascio
Fascio IMPROPRIO di rette: rette complanari parallele ad una stessa
retta che rappresenta la direzione del fascio
Retta PER due punti
Per due punti passa una
ed una sola retta
Retta e due punti
Consideriamo una retta r e due punti A e B su di essa.
La parte di retta compresa tra i due punti considerati da origine
ad un nuovo ente che si chiama segmento.
I due punti considerati A e B si chiamano estremi.
segmento
In una retta
ci sono infiniti punti
(lo dice l’assioma).
E in un segmento?
Anche il segmento contiene infiniti punti (compresi tra due estremi),
come la retta e la semiretta, perché sono insiemi DENSI.
Un insieme si dice denso se presi due punti qualsiasi su di essi esiste
almeno un altro punto interno ad essi.
SEGMENTI PARTICOLARI
Segmenti CONSECUTIVI: segmenti che hanno in comune un estremo e
nessun altro punto (i segmenti giacciono su rette origine non
coincidenti tra loro)
Segmenti ADIACENTI: due segmenti che oltre ad essere consecutivi
appartengono alla stessa retta cioè hanno un estremo in comune e le
rette origini sono coincidenti tra loro.
Punto medio di un segmento
Punto che divide il segmento in due segmenti uguali
AM = MB = 1/2 AB
A
M
B
SIMMETRIA CENTRALE
Due punti A e B si dicono simmetrici rispetto ad un punto
centrale M se A e B sono equidistanti da esso. Il punto M si
chiama centro di simmetria.
A
M
B
RETTA PER TRE PUNTI
Rette per tre
punti
I tre punti non
sono allineati
Passano
3 rette
I tre punti
sono allineati
Passa
una retta
Per tre punti
non allineati
passano 3 rette
Per tre punti
allineati passa
una ed una
sola retta
Una volta verificato che per tre punti
si dicono
allineatiTre
passapunti
una sola
retta, quando
3allineati
punti si dicono
allineati?
se giacciono
su una stessa retta
Piano e retta
Piano e retta possono essere:
Complanari
r
a
complanari
r
a
Incidente
incidente
r
Parallelo
a
parallelo
r
a
Riguardiamo le
seguenti figure
complanari
r
a
incidente
r
a
parallelo
Cosa succede se una
retta ha 2 punti di
contatto col piano?
Se una retta ha
due punti di contatto
col piano è ad
esso complanare
Postulato di partizione del piano
Una retta r di un piano divide il piano in due parti non vuote tali che:
r
A
B
Se i punti A e B appartengono alla stessa parte, allora il segmento AB è
contenuto in questa parte
C
r
D
Se i punti C e D appartengono a parti diverse, allora il segmento CD ha
in comune con r un punto
Una retta r complanare ad un piano a ha tutti i suoi punti in comune col
piano. In questo caso si dice che la retta r giace sul piano a.
Essendo la lunghezza della retta infinita abbiamo che una retta che giace
sul piano a lo divide in due parti uguali o non uguali dette semipiani.
SEMIPIANO: ciascuna delle due parti in cui un piano è diviso da una
sua retta, la retta è detta origine del semipiano.
Due semipiani si dicono OPPOSTI se:
• hanno solo la retta origine in comune
• appartengono allo stesso piano
Semipiano
Si definisce semipiano
ciascuna delle parti in cui
un piano risulta suddiviso
da una retta complanare
Grandezze omogenee e non omogenee
Due grandezze si dicono omogenee se sono dello stesso tipo e quindi si
possono:
1.
Confrontare
2.
Sommare
Esempi di grandezze omogenee: segmenti con segmenti e angoli con
angoli.
Due grandezze si dicono non omogenee o eterogenee se non sono dello
stesso tipo e quindi non si possono né confrontare e né sommare.
Esempi di grandezze non omogenee: segmenti con angoli.
MOVIMENTO RIGIDO
Il movimento rigido non si può definire, perché è un concetto
primitivo. L’assioma che lo caratterizza dice che: il
movimento rigido conserva le distanze. Il movimento rigido è
una trasformazione che altera la posizione ma non la forma
della figura considerata.
F1
F2
CONGRUENZA
Due figure F1 e F2 si dicono congruenti o sovrapponibili quando
è possibile sovrapporle con un movimento rigido in modo che
coincidano punto per punto. I punti che coincidono si dicono
corrispondenti o omologhi.
F1
F2
F1 F2
CONGRUENZA DIRETTA
Se il movimento che porta a sovrapporre la figura F2 su F1 è di
trascinamento o di scivolamento (non si esce dal piano) allora la
congruenza tra F1 e F2 si dice DIRETTA.
F1
F2
F1 F2
CONGRUENZA INVERSA
Se il movimento che porta a sovrapporre la figura F2 su F1 è di
ribaltamento (si esce dal piano) allora la congruenza tra F1 e F2
si dice INVERSA.
F1
F2
F1 F2
FIGURE UGUALI E DISUGUALI
Due figure F1 e F2 si dicono uguali se rappresentano la stessa figura
cioè se sono già sovrapposte inizialmente e coincidono punto per punto.
Due figure sono disuguali se non sono né uguali e né congruenti
F1 = F2
F1
≠
F2
Proprietà della congruenza
RIFLESSIVA: una figura è congruente a se stessa, cioè
F1 F1
SIMMETRICA: se F1 è congruente a F2, allora anche F2 è congruente a
F1, cioè se
F1 F2, allora F2 F1
TRANSITIVA: se F1 è congruente a F2, e F2 è congruente a F3 allora anche
F1 è congruente a F3,cioè se
F1 F2 e F2 F3, allora F1 F3
PROPOSIZIONI DEDOTTE
Tutte le rette sono congruenti fra loro.
Tutte le semirette sono congruenti fra loro.
Tutti i piani sono congruenti fra loro.
CONFRONTO TRA GRANDEZZE
Per confrontare l’altezza di due persone e vedere chi è più alto, facciamo
mettere affiancate le due persone in modo che i piedi stiano allo stesso
livello, dopo di che confrontiamo l’estremità della testa: è più alto chi ha
l’estremità della testa più in alto.
Un procedimento analogo si fa per confrontare due segmenti.
Confrontare due segmenti significa stabilire se sono congruenti o non lo
sono. Nel caso in cui non siano congruenti significa stabilire quale tra i
due sia il maggiore.
Per confrontare due segmenti AB e CD, facciamo in modo che con un
movimento rigido gli estremi A e C coincidano, che coincidano anche le
rette AB e CD e che gli estremi B e D stiano dalla stessa parte rispetto ad
A e C.
A questo punto possono verificarsi tre situazioni possibili:
1. L’estremo B è esterno al segmento CD, allora diciamo che AB è
maggiore di CD, scriviamo AB > CD;
A
B
A==C
C
D
D
B
2. L’estremo B coincide con D, (C A, D B), allora diciamo che i due
segmenti sono congruenti, scriviamo AB CD ;
A
B
A=C
C
D
B=D
3. L’estremo B è un punto interno al segmento CD, allora diciamo che AB è
minore di CD, scriviamo AB < CD.
A
B
A=C
C
D
B
D
Per il confronto tra grandezze omogenee vale la legge di esclusione che
dice: il verificarsi di uno dei tre casi esclude gli altri due.
LEGGE DI TRICOTOMIA
Dati sue segmenti AB e CD si avrà:
1. AB CD
2. AB < CD
3. AB > CD
SOMMA DI SEGMENTI
Dati due segmenti la loro somma è il segmento che si ottiene
disponendoli uno adiacente all’altro
a
b
a+b
DIFFERENZA DI SEGMENTI
Si dice differenza di due segmenti a e b, di cui il primo è
maggiore o congruente al secondo, il segmento c che
addizionato al secondo da per somma il primo.
b
a
b
c
a
a=c+b
MULTIPLI E SOTTOMULTIPLI DI UN SEGMENTO
Si definisce multiplo di un segmento a secondo il numero
naturale n 2, la somma di n segmenti congruenti ad a.
a
b = 4a
a è detto sottomultiplo di b secondo n.
ANGOLO
Un angolo è formato da ciascuna delle due parti in cui un piano viene
diviso da due semirette aventi l’origine in comune
Angolo concavo
Angolo convesso
Un angolo si dice CONCAVO se contiene i prolungamenti dei suoi lati
Un angolo si dice CONVESSO se non contiene i prolungamenti dei suoi lati
I punti di un angolo che non appartengono ai lati si dicono
interni.
Gli altri punti, sempre esclusi i lati, si dicono esterni.
Un angolo contiene al suo interno infinite semirette.
ANGOLO PIATTO
Angolo PIATTO: un lato è il prolungamento dell’altro ( 180° =
π); é un angolo convesso.
O
b
equivale ad un semipiano
a
ANGOLI PARTICOLARI: GIRO E NULLO
Angolo GIRO: i due lati sono sovrapposti (360° = 2π); è concavo.
Esso è dato dall’unione di due angoli piatti e coincide con tutto il
piano.
Angolo NULLO: i due lati sono sovrapposti (0°) si riduce ad una
semiretta; è convesso.
o
ANGOLI PARTICOLARI
Angolo RETTO: è la metà di un angolo
piatto (90° = π/2); è convesso
Angolo ACUTO: è minore di 90°
Angolo OTTUSO: è maggiore di 90°
Angoli OPPOSTI AL VERTICE: se i lati dell’uno sono i
prolungamenti dell’altro
ANGOLI ADIACENTI
Angoli ADIACENTI: due angoli che oltre ad essere consecutivi hanno i
due lati non comuni l’uno sul prolungamento dell’altro (o che
appartengono alla stessa retta o che le rette origine sono coincidenti
tra loro).
La somma di due angoli adiacenti è un angolo piatto.
AôB e BôC = angoli adiacenti
AôB + BôC = angolo piatto
B
C
A
O
Angoli CONSECUTIVI: due angoli aventi in comune il vertice, un lato e
nessun altro punto e i restanti lati giacciono su rette origine non
coincidenti tra loro. AôB + BôC = AôC somma dei due angoli dati (angolo
somma)
CONFRONTARE DUE ANGOLI
Significa stabilire se sono congruenti o non lo sono.
Per confrontare due angoli a di lati a e b e di lati c e
d, bisogna operare un movimento rigido che faccia
sovrapporre o coincidere i due vertici e un lato (uno
dei due lati dell’angolo).
A seconda della posizione del secondo lato b del
secondo angolo si hanno i seguenti tre casi:
a colore verde; colore rosso
1° CASO : a
a coincide con c
b coincide con d
2° CASO :a <
a coincide con c
b inteno angolo
3° CASO: a >
a coincide con c
b esterno angolo
LEGGE DI TRICOTOMIA
Dati due angoli a e , si avrà:
1. a ,
2. a < ,
3. a > ,
si può verificare solo uno dei seguenti casi ( legge di esclusione)
SOMMA DI ANGOLI CONVESSI
1.
Dati due angoli convessi la loro somma è l’angolo che si ottiene
disponendoli uno consecutivo all’altro.
DIFFERENZA DI ANGOLI
Si dice differenza di due angoli, di cui il primo è maggiore o congruente
al secondo, l’angolo che addizionato al secondo da per somma il primo.
Due angoli la cui somma è un angolo retto si dicono COMPLEMENTARI
Due angoli complementari ad uno stesso angolo sono CONGRUENTI
fra loro.
Due angoli la cui somma è un angolo piatto si dicono SUPPLEMENTARI
Due angoli supplementari ad uno stesso angolo sono CONGRUENTI
fra loro.
Due angoli la cui somma è un angolo giro si dicono ESPLEMENTARI
Bisettrice di un angolo
Semiretta che divide un angolo in 2 angoli congruenti
a
a
Figure convesse
Una figura si dice CONVESSA, se per ogni coppia di punti A e B
appartenenti alla figura, il segmento AB è interamente contenuto nella
figura
B
A
Figure concave
Una figura si dice CONCAVA, se esiste almeno una coppia di punti A e B
appartenenti alla figura, tali che il segmento AB non sia interamente
A
contenuto nella figura
B
RETTE PERPENDICOLARI
Due rette si dicono perpendicolari se, incontrandosi,
formano quattro angoli retti.
Asse di un segmento
Retta perpendicolare al segmento AB passante per il suo
punto medio M
90°
A
M
B
SIMMETRIA ASSIALE
Due punti A e B si dicono simmetrici rispetto ad un asse se A e B sono
equidistanti da esso. L’asse si chiama asse di simmetria.
90°
A
M
B
TEOREMA: PROIEZIONE DI UN PUNTO SU UNA RETTA
Da un punto appartenente ad una retta o esterno ad essa si può
condurre una ed una sola retta perpendicolare a quella data.
P
r
90°
H
H = Piede della perpendicolare ad r, condotta dal punto P
H = Proiezione ortogonale di P sulla retta r
Il segmento P H si chiama Distanza di P dalla retta r.
Distanza di un punto da una retta
P
90°
H
Segmento di perpendicolare che unisce il punto alla retta, cioè il
segmento PH
PROIEZIONE DI UN SEGMENTO
Si dice proiezione di un segmento sopra una retta il segmento
che ha per estremi le proiezioni sulla retta degli estremi del
segmento dato.
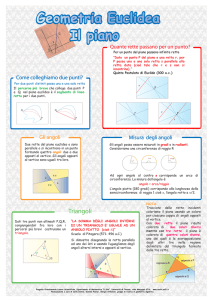
Quinto Postulato di Euclide
Per un punto esterno a una retta passa una e una sola retta
parallela alla retta data
A
Per ogni punto interno alla retta passano infinite rette, ma una e una
sola è la perpendicolare alla retta data per ogni suo punto.
90°
Per ogni punto esterno alla retta passano infinite rette, ma una e una sola è la
parallela e una e una sola è la perpendicolare alla retta data per ogni punto
esterno ad essa.
A
Poligonale o spezzata aperta (non intrecciata)
Insieme di più segmenti consecutivi
lato
vertici
estremi
Poligonale o spezzata chiusa (non intrecciata)
Poligonale aperta a cui si aggiunge un segmento che ne congiunge gli
estremi
POLIGONO
Parte di piano delimitata da una poligonale chiusa non
intrecciata
Poligono convesso: i
prolungamenti di TUTTI i suoi
lati sono esterni al poligono
Poligono concavo: il
prolungamento di ALMENO UN lato lo
divide in due parti
Un poligono ha sempre un egual numero di lati e di vertici
(angoli).
In generale, i lati e gli angoli interni di un poligono si chiamano
ELEMENTI.
Il segmento che ha per estremi due vertici non consecutivi si
chiama diagonale.
Si definisce corda ogni segmento che ha per estremi due punti
qualunque del contorno del poligono non appartenenti a uno
stesso lato.
In un poligono le diagonali sono in numero finito, mentre le corde
sono infinite.
Un poligono si dice equilatero se ha i lati tutti congruenti tra
loro.
Un poligono si dice equiangolo se ha gli angoli tutti congruenti
tra loro.
equilatero
equiangolo
OSSERVAZIONE: Poligono equiangolo non implica che sia equilatero;
POLIGONO EQUILATERO non implica che sia equiangolo.
Angoli interni e esterni
Angoli
esterni
Angoli
interni
L’angolo interno e l’angolo esterno di ciascun vertice di un poligono
sono supplementari
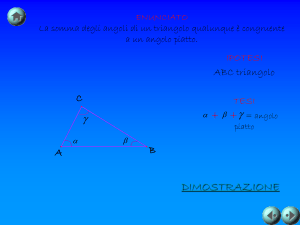
TRIANGOLO
Ha sei elementi: tre lati e tre angoli.
Ad ogni lato si oppone un angolo e viceversa, cioè ad ogni
angolo si oppone un lato.
Il triangolo non ha diagonali, ma ha infinite corde.
ANGOLO ESTERNO
C
A
B B
- Angoli interni al triangolo: ABC, BCA, CAB
- Angoli esterni al triangolo: KBC
K
striscia
striscia
Ha otto elementi: quattro lati e quattro angoli.
Ad ogni lato si oppone un lato angolo e ad ogni angolo si
oppone un angolo.
Il quadrilatero ha due diagonali e ha infinite corde.
Se le strisce hanno altezze diverse…
h
h
h
RETTANGOLO
PARALLELOGRAMMA
RETTANGOLO
PARALLELOGRAMMA
ANALIZZIAMO:
PARALLELOGRAMMA
RETTANGOLO
1) lati opposti uguali paralleli
2) angoli opposti uguali
Parallelogrammo equiangolo
3)
una diagonale divide il
parallelogrammo in due
1) lati opposti uguali e
paralleli
triangoli congruenti
2) 4 angoli retti
4) le diagonali si bisecano
scambievolmente
5) gli angoli adiacenti a ciascun
lato sono supplementari
3) 2 diagonali uguali
4) le diagonali NON coincidono
con le bisettrici
Se le strisce hanno la strisce hanno la stessa altezza…
h
h
h
QUADRATO
ROMBO
QUADRATO
ROMBO
ANALIZZIAMO:
ROMBO
QUADRATO
Parallelogrammo
equilatero
Parallelogrammo regolare
(equiangolo ed equilatero)
1) 4 lati uguali
1) 4 lati e 4 angoli uguali
2) angoli opposti uguali
2) diagonali uguali,
perpendicolari e bisettrici
degli angoli ai vertici.
3) diagonali diverse,
perpendicolari e bisettrici
degli angoli ai vertici.
Trapezi ROMBI
Quadrilateri
Parallelogrammi
RETTANGOLI
Quadr.
Se le strisce hanno forme diverse…
TRAPEZIO
TRAPEZIO SCALENO
TRAPEZIO RETTANGOLO
TRAPEZIO ISOSCELE
ANALIZZIAMO:
Trapezio rettangolo
Trapezio isoscele
Trapezio scaleno
LA PRESENTAZIONE È FINITA,
ORA TOCCA A TE,
BUON LAVORO
FINE PRESENTAZIONE