P.R.I.N. 2005
Metodi e Algoritmi Integrati per la Diagnostica
Non Distruttiva di Beni Architettonici
Coordinatore scientifico Giuseppe Acciani
Durata del programma
24 mesi
ET 2007, Firenze 30 giugno 2007
unità partecipanti/1
BARI (G. Acciani)
Tecniche di feature extraction e classificazione di segnali
per l'analisi di dati multidimensionali nella diagnostica non
distruttiva di beni architettonici
CAGLIARI (B. Cannas)
Tecniche di Soft Computing per la diagnostica non
distruttiva di opere murarie
CATANIA (G. Aiello)
Sviluppo di un codice a elementi finiti per la diagnostica
non distruttiva di beni architettonici mediante onde elettromagnetiche e/o ultrasoniche
ET 2007, Firenze 30 giugno 2007
unità partecipanti/2
PISA (A. Musolino)
Caratterizzazione e identificazione teorico-sperimentale di
nuove tecniche di indagine non distruttiva a onde guidate
ultrasonore per l’ispezione strutturale di beni architettonici
ROMA (R. Parisi)
Schiere di sensori per la diagnostica non distruttiva di beni
architettonici
ET 2007, Firenze 30 giugno 2007
finanziamenti
Risorse
disponibili
15.500
COFIN
assegnato
24.800
CAGLIARI
10.200
24.000
34.200
CATANIA
5.700
13.100
18.800
PISA
19.500
45.300
64.800
ROMA
11.100
25.800
36.900
Totale
62.000
133.000
195.000
Unità
BARI
ET 2007, Firenze 30 giugno 2007
Totale
40.300
obiettivi
Realizzare un sistema multisensoriale per la DnD di murature in grado
di integrare tecniche tradizionali e non tradizionali con metodologie di
interpretazione “cooperativa” dei dati acquisiti
Sviluppare un sistema integrato di acquisizione dati e gestione delle
informazioni e delle conoscenze per evidenziare le specifiche
caratteristiche di un’opera muraria
Fornire una valutazione dello stato di conservazione dell’opera
muraria e classificare e misurare le tipologie di difetti individuate
ET 2007, Firenze 30 giugno 2007
articolazione della ricerca
1. Ottimizzazione di tecniche diagnostiche ND tradizionali
e sviluppo di metodologie innovative
Indagini soniche ed ultrasoniche e termografia
Modellazione di strutture murarie
Indagini su sensori scalari e vettoriali (sonico/US)
Obiettivo:definire e implementare una procedura di progettazione
ottimizzata del sistema trasmissione - ricezione per individuarne
caratteristiche e parametri che garantiscano affidabilità e
flessibilità diagnostica
ET 2007, Firenze 30 giugno 2007
articolazione della ricerca
2. Integrazione e interpretazione delle informazioni.
Diagnosi della struttura
Classificazione dei difetti più comuni.
Elaborare con tecniche di soft-computing le informazioni ottenute dal
sistema multisensoriale
Obiettivo: realizzare una procedura di Data Fusion e Decision
Fusion per la caratterizzazione diagnostica dello stato della
muratura in esame
ET 2007, Firenze 30 giugno 2007
attività svolte al 30/05/07
Simulazione
BA
Classificazione dati
simulazioni
Misure
BA
Elaborazione dati
misurati
BA
PI
RM
CA
CA
PI
PI
ET 2007, Firenze 30 giugno 2007
CA
RM
CT
attività svolte al 30/05/07
Simulazione
Bari: Ultrasonico e sonico 2 e 3D
Pisa: Ultrasonico e sonico 3D, posizionamento
sensori
Roma: Analisi propagazione in ambienti
riverberanti
Cagliari: Sonico 3D, prove per trasparenza
Catania: Sviluppo software dedicato
ET 2007, Firenze 30 giugno 2007
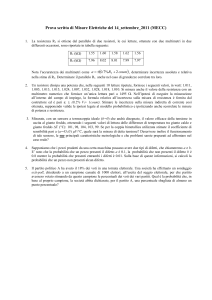
Risultati simulazioni
Time 9e-5 s – Spostamento – f = 70 kHz
Perturbazione dovuta al difetto
Onda Longitudinale
Analisi di propagazione di onde elastiche longitudinali
Onda trasversale
Spostamento v - lettura in trasparenza
Onda diretta L
Eco della parete 3 del difetto
Eco di fondo
Eco della parete 1 del difetto
Spostamento v - lettura in riflessione
Eco del difetto in asse
Onda diretta T
Eco del difetto
Eco del difetto sul bordo
Eco di fondo
ET 2007, Firenze 30 giugno 2007
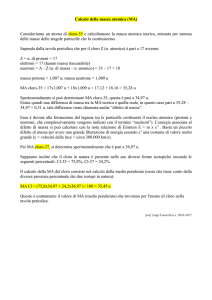
Risultati simulazioni
Analisi di propagazione di onde elastiche trasversali
Senza difetto
1550
Fx(t)
520
Difetto
Y
X
Z
Condizione al bordo
x=0 y=0 z=0
ET 2007, Firenze 30 giugno 2007
Con difetto
Risultati simulazioni
Ambienti riverberanti
Esempio di molteplici fronti d’onda individuati da più coppie
microfoniche in caso di riverbero.
Solo l’intersezione delle direzioni dovute ai cammini diretti
individua la zona dove è presente la sorgente acustica
Mappa sonora dovuta a sorgente omni-direzionale (in figura è
esaminata anche la parte esterna alla stanza, quest’ultima
delimitata da righe bianche – in tal modo si evidenziano anche
sorgenti immagini, come la parte rossa a destra)
Lunghezza d’onda
Frequenze in esame
Velocità
Propagazione
Acustica nell’aria
l 0.11 m
f 3 kHz
v 344 m/s,
Propagazione onde
elastiche nel
calcestruzzo
ll 0.16 m
ll 0.11 m
f 25 kHz
f 35 kHz
vl 4000 m/s
lt 0.09 m
lt 0.06 m
f 25 kHz
f 35 kHz
vt 2200 m/s
ET 2007, Firenze 30 giugno 2007
Risultati simulazioni
Analisi numerica metodo di lettura in trasparenza
1. Simulazione della propagazione di un onda
elastica nel pilastro senza difetto e con difetti
(aria) di dimensione e posizione variabile.
2. Finite Element Method (FEM), modulo LSDYNA di ANSYS.
3. Emettitore e ricevitore su facce opposte del
pilastro (metodo in trasparenza)
ET 2007, Firenze 30 giugno 2007
Risultati simulazioni
Sviluppo software dedicato 1/2
Equazioni elasticita’ in mezzo lineare omogeneo e isotropo
(λ μ) u μΔu fv ρ u
fv forza per unita’ di volume, r densità di massa volumica; l e m costanti di Lame’.
Discretizzazione spaziale: FEM (elementi nodali lagrangiani del I ordine)
n Ku n R n
Mu
Integrazione nel tempo: differenze centrali
M un1 t Rn t Ku n M2 un un1
2
2
Metodo implicito; viene reso esplicito sostituendo alla matrice M una matrice diagonale M’
costruita a partire da M
u n 1 t M '
2
Il passo di integrazione: Δt
2
ωmax
1
R n t M '
2
1
Ku n 2 u n u n 1
dove max e’ la più grande delle radici di det(K-2M’)=0.
max puo’ essere stimato usando il teorema di Gerschgorin:
ET 2007, Firenze 30 giugno 2007
2
max
max kii
'
k
ij \ m ii
j 1, j i
ne
Risultati simulazioni
Sviluppo software dedicato 2/2
dimensione x della parete
6,00
m
dimensione y della parete
6,00
m
dimensione z della parete
0,25
m
modulo di Young
22,0
GPa
coefficiente di Poisson
0,15
-
densità
2.400
kg/m3
costanti di Lamè
9,560
GPa
costanti di Lamè
4,099
GPa
2,0
kHz
velocità dell’onda
2,0
kms-1
0.4
lunghezza d’onda
1,0
m
0.2
numero di macroelementi
in una lunghezza d’onda
20
-
intervallo di simulazione
30
ms
-0.4
passo temporale
5
μs
-0.6
1
0.8
frequenza
0.6
ux m
0
-0.2
numero di elementi
144000
numero di nodi
35574
-0.8
-1
0.00E+00
1.00E-03
2.00E-03
3.00E-03
4.00E-03
tempo s
senza difetto
ET 2007, Firenze 30 giugno 2007
difetto orizzontale
difetto verticale
5.00E-03
6.00E-03
attività svolte al 30/05/07
Classificazione dati delle Simulazioni
Cagliari: Localizzazione e valutazione
dell’estensione di vuoti.
Bari: Riconoscimento posizione, orientamento
ed estensione di fessure.
ET 2007, Firenze 30 giugno 2007
Classificazione dati delle Simulazioni
Dati simulati
pilastro:
3 eccitazioni
7 ricevitori
per difetto
Diagnosi neurale
FFT2
Le forme d’onda relative al pilastro con
difetto vengono organizzate in matrici.
FFT 2D: le ampiezze dipendono dalle
dimensioni del difetto. Le fasi dipendono
dalla posizione.
32 componenti di ampiezza estratte da
quelle con la cui ampiezza e’ maggiore
del 75% del massimo nella matrice.
Struttura del Multi-Layer Perceptron:
32 nodi di ingresso
1 strato nascosto con 10 nodi e funzione
di attivazione tangente iperbolica
6 nodi di uscita: 3 coodinate posizione
baricentro e 3 dimensioni del difetto.
Funzione di attivazione lineare.
Addestramento (Levenberg-Marquand)
con 70 esempi e 13 test.
ET 2007, Firenze 30 giugno 2007
Baricentro
difetto
MLP
Dimensioni
difetto
Classificazione dati delle Simulazioni
35
30
CLASSE 1
25
L’identificazione della posizione del difetto
avviene mediante un classificatore statistico
che opera sulla base di feature tempofrequenza (feature extraction – trasformate
wavelet) ridotte e selezionate mediante un
algoritmo genetico.
CLASSE 4
Profondità (cm)
20
15
10
CLASSE 10
5
0
-5
0
10
TRASMETTITORE
20
30
40
50
Larghezza (cm)
60
70
80
90
100
La posizione del difetto e’ data
dall’intersezione tra la circonferenza (curva
blu centrata in A) e della ellisse (curva
rossa i cui fuochi sono A e B). Le curve
rappresentano i luoghi dei punti a tempo di
volo costante noti in ricezione.
DIFETTO
EMETTITORE
RICEVITORE A
RICEVITORE B
ET 2007, Firenze 30 giugno 2007
attività svolte al 30/05/07
Rilievi Sperimentali
Pisa: Misure per riflessione: Rilevazione dell’eco
del difetto.
Cagliari: Misura per trasparenza: determinazione
dei “tempi di volo”.
Bari: Misure con termocamera.
ET 2007, Firenze 30 giugno 2007
Rilievi sperimentali
Strumentazione
Misure degli echi dei difetti
Il sistema MsS2020 - SWRI
Deformazioni elastiche a frequenza (5÷250 kHz)
Trasdutore-Sensore di tipo magnetostrittivo
Onde generate:
- longitudinali, torsionali o di tipo Lamb in
strutture cilindriche
- onde di tipo trasverso in strutture piane
Regione ispezionabile:
- per condutture in aria: fino a 70-80 m
- per strutture planari: decina di metri quadrati
ET 2007, Firenze 30 giugno 2007
Rilievi sperimentali
Misure dei tempi di volo
Misura dei tempi di volo per ciascuna coppia emettitore ricevitore
Suddivisione del dominio in celle (10x10)
Problema inverso: determinare la velocita’ che compete a ciascuna cella
Algoritmi utilizzati: Singolar Value Decomp., S V D Regolarizzata, Algebric
Reconstruction Tech., Simultaneous Reconstruction Tech., Gradiente Biconiugato
Dati
simulati
EMETTITORI
RICEVITORI
Risultati inversione dati sperimentali pilastro sano
Errore
1%
Errore
10%
ET 2007, Firenze 30 giugno 2007
Rilievi sperimentali-Termografia
profilo
Profilotermico
termicodell'immagine
dell'immagine20,
20,colonna
colonna180
180
31
31
Temperatura [°C]
temperatura [°C]
30.8
30.6
30.5
30.4
30.2
30
30
29.8
29.6
29.5
00
50
50
100
100
150
150
200
200
250
250
pixel
pixel
I termogrammi sono affetti da rumore
termico e di contrasto eliminabili con un
filtro avente f = 15 n = 1,86°C e kernel
3 pixel. L’analisi del profilo termico ha
evidenziato minimi di temperatura in
corrispondenza della malta.
1 Compressione dovuta
a martellate ripetute.
2 Foro ricoperto da gesso
profondo circa 1 cm
3 Distacco di intonaco
Lo studio in frequenza è stato condotto
con la Pulsed Phase Thermography (PPT)
I diagrammi di ampiezza e di fase (pari al
numero dei frame della misura) sono
ottenute valutando la FFT 2D delle
immagini termiche acquisite.
Si ottengono immagini di fase di zone
difettate che sono meno sensibile a
disturbi come:
riscaldamento non uniforme del campione;
riflessioni ambientali;
le variazioni di emissività della superficie;
la geometria del campione;
la profondità del difetto.
ET 2007, Firenze 30 giugno 2007
attività svolte al 30/05/07
Elaborazione Dati Misurati
Pisa: Localizzazione delle sorgenti secondarie
(triangolazione).
Roma: Analisi dei dati provenienti da schiere di
sensori (mappe acustiche della struttura)
ET 2007, Firenze 30 giugno 2007
Elaborazione dati misurati
t=15 cm
sensors
sensors
YA
2
YB
path 1
path 0
trasducer
path 1
path 2
path 3
lo=71.5 cm
1
2
l0 0.5 ( y A yB )
path 2
t0 ( yB y A ) / v
ET 2007, Firenze 30 giugno 2007
y yB
lk 2k t A
4k
tk (( y B y A ) cos k ) / v
2
Elaborazione dati misurati
Posizione corrente
Localizzazione sorgenti secondarie (difetti)
Lastra di calcestruzzo assimilata ad un ambiente riverberante in cui i bordi riflettono le
perturbazioni elastiche e eventuali difetti agiscono come sorgenti secondarie.
Posizione alternativa
Risultati delle misure effettuate con 4 coppie di sensori posizionati solo su una
faccia della lastra in prossimita’ dei bordi
ET 2007, Firenze 30 giugno 2007
attività pianificate
Realizzazione di altre strutture murarie
strumentate per ulteriori misure
Interpretazione cooperativa dei dati acquisiti
Implementazione di algoritmi di Data Fusion &
Decision Fusion
ET 2007, Firenze 30 giugno 2007