Rudimenti di topologia sugli spazi normati
20 settembre 2011
In queste dispense introdurremo il concetto di topologia sugli spazi normati,
con particolare interesse per gli spazi vettoriali Rn . Questa introduzione è particolarmente utile per definire i limiti e la continuità per funzioni a più variabili. Con
il simbolo R+ denoteremo l’insieme {x ∈ R : x ≥ 0}.
1 Spazi normati
Definizione 1.1 Sia X uno spazio vettoriale su R. Una norma su X è una funzione
k·k : X −→ R+
tale che
1. kxk = 0 se e solo se x = 0.
2. kλxk = |λ|kxk per ogni λ ∈ R e per ogni x ∈ X .
3. (Disuguaglianza triangolare) kx + yk ≤ kxk + kyk per ogni x, y ∈ X .
Definizione 1.2 La coppia (X , k·k), dove X è uno spazio vettoriale X su R e k·k
è una norma su X , si dice uno spazio normato.
Esempio 1.3 La funzione valore assoluto su R è una norma su R; di conseguenza
la coppia (R, |·|) è uno spazio normato.
Proposizione 1.4 La funzione
k·k :
−→ q R+
(x1 , . . . , xn ) 7−→
x21 + · · · + x2n
Rn
è una norma su Rn . Tale norma si dice norma Euclidea.
1
(1.1)
Dimostrazione. Chiaramente si ha che k(x1 , . . . , xn )k ≥ 0 per ogni (x1 , . . ., xn ) ∈
Rn . Dimostriamo che le tre richieste della definizione di norma valgono.
1. Si noti che k(0, . . . , 0)k = 0. Supponiamo ora che k(x1 , . . ., xn )k = 0. Di
conseguenza x21 + · · · + x2n = 0 e quindi xi = 0 per ogni i ∈ {1, . . . , n}.
2. Siano λ ∈ R e (x1 , . . . , xn ) ∈ Rn . Vale
q
kλ (x1 , . . . , xn )k = k(λx1 , . . . , λxn )k = (λx1 )2 + · · · + (λxn )2
q
= |λ| x21 + · · · + x2n = |λ|k(x1 , . . ., xn )k.
3. Si noti che
1
k(x1 , . . . , xn )k = ((x1 , . . . , xn ) · (x1 , . . ., xn )) 2
per ogni (x1 , . . . , xn ) ∈ Rn , dove il simbolo · denota il prodotto scalare di Rn .
Per una definizione di prodotto scalare si veda ad esempio [1, Pagg. 110 e
seguenti]. Per ogni (x1 , . . . , xn ) , (y1 , . . ., yn ) ∈ Rn vale la seguente disuguaglianza di Schwarz
q
q
|(x1 , . . . , xn ) · (y1 , . . . , yn )| ≤ x21 + · · · + x2n y21 + · · · + x2n .
Pertanto, se (x1 , . . ., xn ) , (y1 , . . ., yn ) ∈ Rn , allora
k(x1 , . . ., xn ) + (y1 , . . ., yn )k2 = k(x1 + y1 , . . . , xn + yn )k2
= (x1 + y1 , . . ., xn + yn ) · (x1 + y1 , . . ., xn + yn )
= (x1 , . . ., xn ) · (x1 , . . . , xn ) + (y1 , . . . , yn ) · (y1 , . . ., yn )
+2 (x1 , . . . , xn ) · (y1 , . . . , yn )
= k(x1 , . . ., xn )k2 + k(y1 , . . . , yn )k2 + 2 (x1 , . . . , xn ) · (y1 , . . ., yn )
≤ k(x1 , . . ., xn )k2 + k(y1 , . . . , yn )k2
q
q
+2 x21 + · · · + x2n y21 + · · · + x2n
= (k(x1 , . . . , xn )k + k(y1 , . . . , yn )k)2 .
La dimostrazione è conclusa.
2
Esercizio 1 Dimostrare che la funzione
k·k∞ :
Rn
−→
R
(x1 , . . . , xn ) 7−→ max {|x1 |, . . . , |xn |}
(1.2)
è una norma su Rn .
Esercizio 2 Dimostrare che la funzione
k·k1 :
Rn
−→
R
(x1 , . . . , xn ) 7−→ |x1 | + · · · + |xn |
(1.3)
è una norma su Rn .
2 Topologia
In questa sezione la coppia (X , k·k) denoterà uno spazio metrico.
Definizione 2.1 Dati xo ∈ X e r > 0, l’insieme
B(xo , r) = Br (xo ) = {x ∈ X : kx − xo k < r}
(2.4)
si dice palla (o boccia) di X centrata in xo e raggio r.
Esempio 2.2 Se X = R e k·k è la norma Euclidea, allora B(xo , r) coincide con
l’intervallo ]xo − r, xo + r[.
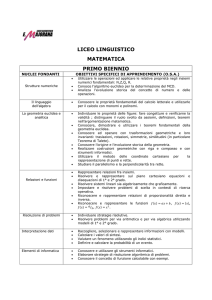
Esempio 2.3 Se X = R2 e k·k è la norma Euclidea, allora
B ((xo , yo ) , r) = (x, y) ∈ R2 : (x − xo )2 + (y − yo )2 < r2 .
Per una rappresentazione grafica si veda la Figura 1.
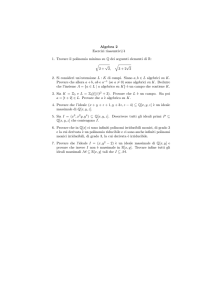
Esempio 2.4 Se X = R2 e k·k∞ è la norma definita in (1.2), allora
B ((xo , yo ) , r) = ]xo − r, xo + r[ × ]yo − r, yo + r[.
Per una rappresentazione grafica si veda la Figura 2.
3
y
2
1
x
−3
−2
−1
−1
1
2
−2
−3
Figura 1: Rappresentazione grafica della palla centrata in (0, 0) e raggio 2 rispetto
alla norma Euclidea.
y
2
1
x
−3
−2
−1
−1
1
2
−2
−3
Figura 2: Rappresentazione grafica della palla centrata in (0, 0) e raggio 2 rispetto
alla norma k·k∞ .
4
y
2
1
x
−3
−2
−1
−1
1
2
−2
−3
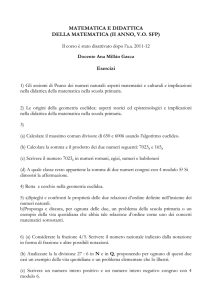
Figura 3: Rappresentazione grafica della palla centrata in (0, 0) e raggio 2 rispetto
alla norma k·k1 .
Esempio 2.5 Se X = R2 e k·k1 è la norma definita in (1.3), allora
B ((xo , yo ) , r) = (x, y) ∈ R2 : |x − xo | + |y − yo | < r .
Per una rappresentazione grafica si veda la Figura 3.
Definizione 2.6 Sia xo ∈ X . Un sottoinsieme U di X si dice un intorno di xo se
esiste r > 0 tale che B(xo , r) ⊆ U .
Definizione 2.7 Un sottoinsieme A di X si dice aperto se per ogni x ∈ A esiste
r = rx > 0 tale che B(x, r) ⊆ A.
Un sottoinsieme C di X si dice chiuso se X \C è aperto.
Esercizio 3 Dimostrare che un sottoinsieme A di X è aperto se e solo se A è un
intorno di ogni suo punto.
Definizione 2.8 Sia B ⊆ X . Un punto xo ∈ B si dice interno a B se B è un intorno
di xo . L’insieme
B̊ = {x ∈ B : x interno a B}
si dice l’interno di B.
5
Definizione 2.9 Sia B ⊆ X . Un punto xo ∈ X si dice di chiusura o di aderenza per
/ L’insieme
B se, per ogni r > 0, B ∩ B(xo , r) 6= 0.
B = {x ∈ X : x di chiusura per B}
si dice la chiusura di B.
Definizione 2.10 Sia B ⊆ X . Un punto xo ∈ X si dice di accumulazione per B se
per ogni r > 0 esiste y tale che y ∈ B ∩ B(xo , r).
Definizione 2.11 Sia B ⊆ X . Un punto xo ∈ B si dice isolato se xo non è di
accumulazione per B.
Definizione 2.12 Sia B ⊆ X . Un punto xo ∈ X si dice di frontiera per B se xo è di
chiusura sia per B che per X \ B. L’insieme
∂B = {x ∈ X : x di frontiera per B}
si dice la frontiera di B.
Esercizio 4 Sia Aα una famiglia di insiemi aperti di X . Provare che ∪α Aα è un
insieme aperto.
Esercizio 5 Siano A1 e A2 insiemi aperti di X . Provare che A1 ∩ A2 è un insieme
aperto.
Esercizio 6 Sia B ⊆ X . Provare che
1. B̊ è un insieme aperto;
2. B̊ ⊆ B;
3. B̊ è il più grande insieme aperto contenuto in B.
Esercizio 7 Sia X = R dotato della norma Euclidea. Si consideri, per ogni
n ∈ N \ {0}, l’insieme aperto An = 0, 1 + n1 . Provare che ∩n∈N\{0} An non è
un insieme aperto.
Esercizio 8 Sia Cα una famiglia di insiemi chiusi di X . Provare che ∩αCα è un
insieme chiuso.
6
Esercizio 9 Siano C1 e C2 insiemi chiusi di X . Provare che C1 ∪C2 è un insieme
chiuso.
Esercizio 10 Sia B ⊆ X . Provare che
1. B è un insieme chiuso;
2. B ⊆ B;
3. B è il più piccolo insieme chiuso contenente B.
Esercizio 11 Sia B ⊆ X . Provare che x ∈ B è isolato se e solo se esiste r > 0 tale
che B(x, r) ∩ B = {x}.
Esercizio 12 Sia B ⊆ X . Provare che ∂B = B ∩ X \ B.
Esercizio 13 Sia X = R dotato della norma Euclidea e sia
I = [0, 1] ∪ [2, 3[∪]4, 5[∪{6} ∪ ([7, 8] ∩ Q) .
˚˚
˚ I,
˚ I.
˚ I,
˚ I,
Determinare gli insiemi ∂I, I, I,
Riferimenti bibliografici
[1] V. Barutello, M. Conti, D. L. Ferrario, S. Terracini, G. Verzini, Analisi
Matematica, Volume 2, Apogeo, Milano, 2008.
[2] G. De Marco, Analisi Due/1, Decibel Zanichelli, Padova, 1992.
[3] G. Prodi, Analisi Matematica, Bollati Boringhieri, Torino, 1970.
[4] W. Rudin, Principles of Mathematical Analysis, third edition, McGraw-Hill,
1964.
7