Distanza con segno da una retta e trasformazioni
del piano cartesiano
Antonino Leonardis
1
Rette nel piano cartesiano (ripasso)
Una retta r nel piano cartesiano è associata a un polinomio di primo grado
ax + by + c (con almeno uno tra a e b diverso da 0), o equivalentemente a
un equazione ax + by + c = 01 , in modo che un punto specifico P (xP , yP )
appartenga alla retta se e solo se è verificata l’equazione:
axP + byP + c = 0.
Data una retta r = ax + by + c = 0 e un punto P (xP , yP ), la distanza tra
la retta e il punto è data dalla formula2 :
d(r, P ) =
|axP + byP + c|
√
a2 + b2
dalla quale possiamo subito vedere che un punto ha distanza 0 da una retta
(nel qual caso si deve annullare il numeratore) se e solo se le appartiene, come
ci aspetteremmo. Due polinomi ax + by + c e a0 x + b0 y + c0 rappresentano
la stessa retta (ovvero due rette coincidenti) se e solo se si ottengono l’uno
dall’altro moltiplicando per una costante diversa da 0. Infatti in tal caso le
equazioni ax + by + c = 0 e a0 x + b0 y + c0 = 0 hanno le stesse soluzioni, come
si può verificare in più modi (supponiamo a0 = ka, b0 = kb, c0 = kc):
- Modo difficile: Il sistema:
ax + by + c = 0
a0 x + b0 y + c0 = 0
per trovarne le intersezioni è indeterminato perché i determinanti (Cramer) sono tutti nulli:
• a · kb − b · ka = 0
1
la quale, risolta rispetto a y, dà la forma esplicita equivalente y = mx+q (con m = − ab
e q = − cb ) nel caso la retta non sia verticale
2
si noti che siccome a e b non sono entrambi nulli a2 + b2 è una quantità strettamente
maggiore di 0
1
• b · kc − c · kb = 0
• c · ka − a · kc = 0
- Modo facile: Se ax + by + c è uguale a 0, allora lo è anche moltiplicato
per una costante (0 · k = 0), e viceversa lo stesso vale per a0 x + b0 y + c.
2
Distanza con segno da una retta
2.1
Normalizzazione
Data una retta r = {ax + by + c = 0} possiamo considerare l’equazione
equivalente a0 x + b0 y + c0 = 0 ottenuta moltiplicando per k = √a21+b2 . Come
abbiamo ricordato precedentemente, tale equazione rappresenta la stessa
retta, e viene chiamata equazione normalizzata. Un rapido conto:
(a0 )2 + (b0 )2 =
a2
b2
a2
b2
+ 2 = 2
+ 2
=1
2
2
k
k
a +b
a + b2
ci permette di dire che una retta normalizzata soddisfa (a0 )2 + (b0 )2 = 1.
Una seconda normalizzazione, che verifica anch’essa tale proprietà, si ottiene moltiplicando per −k, ottenendo la stessa normalizzazione cambiata di
segno3 . D’ora in poi supporremo che la retta r = {ax + by + c = 0} sia già
normalizzata, ovvero che a2 + b2 = 1. La distanza di un punto P (xP , yP ) da
tale retta sarà quindi data dalla formula4 :
d(r, P ) = |axP + byP + c|.
2.1.1
Esempi
√
• La retta 3x+4y +7 = 0 si può normalizzare ( 32 + 42 = 5) ottenendo:
r1 →
r2 →
3
4
7
5 x + 5 y + 5 = 0.
− 53 x − 45 y − 75 = 0.
2
2
9
Come affermato si ha ± 35 + ± 45 = 25
+ 16
25 = 1. Tutte e tre le
equazioni, per esempio, hanno la soluzione x = −1, y = −1, ovvero
tale punto appartiene a tutte e tre le rette (ovviamente, visto che le
rette sono tutte uguali!).
3
Si osservi che, dato un rapporto a : b, esistono solo due coppie (a0 , b0 ) tali che (a0 )2 +
(b0 )2 = 1 e a : b = a0 : b0 ovvero a0 b = ab0 (si intende che 0 : 0 è uguale a qualsiasi rapporto
e due rapporti x : 0 sono uguali). Tali coppie si ottengono intersecando la retta xb = ay e
la circonferenza x2 + y 2 = 1 ottenendo le due soluzioni x = a0 , y = b0 e x = −a0 , y = −b0 .
4
Tale formula è semplicemente ottenuta da quella solita notando che il denominatore
è 1.
2
2.2
Semipiano positivo determinato da una retta normalizzata
Data una retta normalizzata r = {ax + by + c = 0} possiamo considerare
il vettore ~v (a, b). Tale vettore è perpendicolare alla retta, infatti giace sulla
retta bx − ay = 0 che si verifica facilmente essere perpendicolare a r (la verifica è lasciata per esercizio), ed ha lunghezza 1 grazie alla normalizzazione.
In particolare, mi dà una “freccetta” che indica uno dei due semipiani in cui
r divide il piano. La normalizzazione con segno opposto ovviamente darà il
vettore opposto.
2.2.1
Definizione
Il semipiano indicato dal vettore ~v (a, b) è il semipiano positivo determinato dalla retta normalizzata ax + by + c = 0. Cambiando di segno la
normalizzazione, si ottiene l’altro semipiano come semipiano positivo.
2.3
Distanza con segno
Alla distanza tra una retta normalizzata r = {ax + by + c = 0} e un punto
P (xP , yP ) possiamo dare un segno: diamo segno positivo se P appartiene al
semipiano positivo determinato da r, negativo (o nullo) altrimenti. Facendo
un pochino di conti si verifica che tale segno è quello originale del polinomio
axP + byP + c, ovvero la distanza con segno avrà formula:
˜ P ) = axP + byP + c.
d(r,
2.4
Esempi importanti
Le due equazioni degli assi rx → y = 0 e ry → x = 0 sono già normalizzate
(12 +02 = 02 +12 = 1) e le distanze con segno non sono altro che le coordinate
del punto:
˜ y , P ) = xP
d(r
˜ x , P ) = yP
d(r
e in effetti è proprio cosı̀ che sono definite le coordinate:
• La coordinata x è la distanza dall’asse delle y ({x = 0}) con segno
positivo nel semipiano del 1◦ e 4◦ quadrante, che è proprio il semipiano
indicato dal vettore ~vx (a, b) = (0, 1).
• La coordinata y è la distanza dall’asse delle x ({y = 0}) con segno
positivo nel semipiano del 1◦ e 2◦ quadrante, che è proprio il semipiano
indicato dal vettore ~vx (a, b) = (1, 0).
3
Questo ci permette di capire, come vedremo nel prossimo paragrafo, quali sono le coordinate in un sistema definito da due rette perpendicolari e
normalizzate in modo da avere il verso positivo di ogni retta nel semipiano
positivo determinato dall’altra retta.
2.5
2.5.1
Cambio di sistema di riferimento
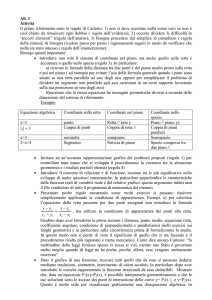
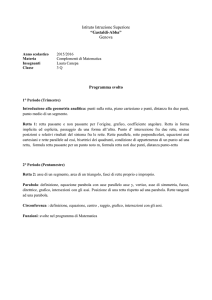
Teorema
Sia data una coppia ordinata di rette r = {ax + by + c = 0} e s =
{dx + ey + f = 0} perpendicolari e normalizzate in modo che ~v (a, b) ruotato
di 90◦ in senso orario dia ~v 0 (d, e), ovvero si possono orientare le rette secondo questi vettori. Questo vuol dire d = b e e = −a, come si può vedere in
figura nel caso a, b > 0 (usando la congruenza dei due triangoli rettangoli
disegnati5 e quindi dei loro cateti a, b, d, e).
Ad esempio tali richieste sono soddisfatte dagli assi cartesiani: {0x+1y+0 =
0} e {1x − 0y + 0 = 0}.
Con tali premesse, dato un punto P (xP , yP ), le sue coordinate nel sistema di
riferimento determinato dalle rette r, s sono date sostituendo nei corrispettivi
polinomi di primo grado le coordinate di P :
˜ P ) = bxP − ayP + f
x0P = d(s,
˜ P ) = axP + byP + c.
yP0 = d(r,
5
Se ciò non fosse già stato fatto e non fosse troppo scontato per lo studente, è un buon
esercizio dimostrare tale congruenza.
4
2.5.2
Fatto importante (non è richiesta la dimostrazione)
Data una trasformazione (che in particolare è una funzione biunivoca) del
piano T (traslazione, rotazione, riflessione, omotetia, etc.), le coordinate di
un punto P nel sistema in cui gli assi sono T (rx ) e T (ry ) (ovvero sono traslati/ruotati/etc. secondo T ) danno le coordinate del punto T −1 (P ) (ovvero del
punto ottenuto applicando a P la trasformazione (= funzione) inversa, cioè
rispettivamente traslazione del vettore opposto/rotazione in verso contrario/etc.)6 . Ad esempio se sposto gli assi di un vettore (1, 1) ottengo i nuovi
assi {x − 1 = 0} e {y − 1 = 0} da cui le coordinate x0P = xP − 1, yP0 = yP − 1
che non sono altro che le coordinate del punto di partenza traslato del vettore
opposto (−1, −1).
3
Funzioni trigonometriche elementari
Indichiamo con O l’origine e con I il punto (1, 0) del piano cartesiano. Sia
dato un angolo (orientato) α.
3.1
Definizione
Si consideri un punto P tale che OP = 1 (quindi sulla circonferenza di
raggio 1 e centro nell’origine, che è chiamata circonferenza goniometrica) e
[ sia equivalente ad α. Allora definiamo il coseno
che l’angolo orientato IOP
e il seno dell’angolo α come le coordinate del punto P :
P = (xP , yP ) =: (cos(α), sin(α)).
Definiamo inoltre la tangente come il rapporto di tali coordinate:
tan(α) :=
sin(α)
cos(α)
ovvero come il coefficiente angolare della retta OP . Tale valore non è ovviamente definito per angoli equivalenti a ± π2 . Si osservi che dalla definizione si
ottiene immediatamente la seguente formula trigonometrica fondamentale:
sin(α)2 + cos(α)2 = 1 (Esercizio: Perché?).
6
Dimostrazione intuitiva (bisogna ragionarci su un po’ per capirla): se si sposta il
piano con i nuovi assi per farli tornare a coincidere con quelli standard, i punti subiranno
la trasformazione inversa rispetto a quella che manda gli assi standard nei nuovi assi.
5
3.2
Definizione equivalente per angoli acuti
Si consideri un triangolo rettangolo qualsiasi con un angolo 0 < α < π/2
e lati a (opposto ad α), b, c (ipotenusa). Allora i rapporti tra i lati dipendono solo da α (criterio di similitudine per triangoli rettangoli). Definiamo
dunque:
a
c
b
cos(α) =
c
a
tan(α) =
b
sin(α) =
1
b
= (chiamata cotangente)
tan(α)
a
1
c
= (chiamata secante)
sec(α) =
cos(α)
b
1
c
csc(α) =
= (chiamata cosecante)
sin(α)
a
cot(α) =
Verrà eventualmente vista la dimostrazione dell’equivalenza delle due definizioni date (non molto complicata) a lezione o in una interrogazione guidata.
6
Come vedremo in seguito, si possono ottenere facilmente le funzioni trigonometriche di un angolo sapendo il suo supplementare o il suo opposto
(esplementare); quindi, siccome per multipli di π/2 il loro valore è facilissimo
da calcolare (sono le coordinate delle intersezioni della circonferenza goniometrica con gli assi cartesiani), è sufficiente conoscerle per gli angoli acuti
(inoltre discende immediatamente dalla definizione col triangolo che considerando l’angolo complementare le funzioni trigonometriche si scambiano,
pertanto basterebbe anche limitarsi ad α ≤ π/4).
3.3
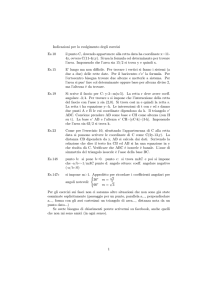
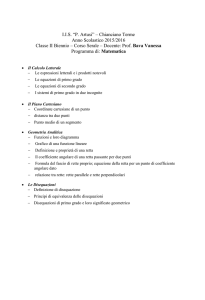
Disuguaglianza fondamentale
Confrontando le aree in figura (moltiplicate per due) si ottiene la seguente
disuguaglianza fondamentale per angoli acuti in radianti :
sin(α) < α < tan(α)
7
4
Riflessione
Siano date le equazioni normalizzate di due rette perpendicolari, che quindi
formano un sistema di riferimento:
r = {ax + by + c = 0}
s = {bx − ay + f = 0}
Allora la riflessione rispetto alla retta r conserva le distanze dai due nuovi
assi cambiando il segno a quella rispetto a r in quanto viene cambiato il
semipiano mentre non modifica il segno della distanza rispetto a s. Questo
significa che se P 0 = (xP 0 , yP 0 ) è il riflesso di P = (xP , yP ) rispetto alla retta
r valgono le uguaglianze (ovvero il sistema):
axP 0 + byP 0 + c = −(axP + byP + c)
= bxP − ayP +f
bxP 0 − ayP 0
+f
Risolvendo tale sistema rispetto a xP 0 e yP 0 si ottengono le equazioni della
riflessione rispetto alla retta r.
Si osservi che la prima equazione si può riscrivere come:
a
xP 0 + xP
yP 0 + yP
+b
+c=0
2
2
ovvero è equivalente alla condizione che il punto medio di P P 0
sia sulla retta r (ESERCIZIO: Verificare geometricamente che
quando due punti hanno distanza opposta da una retta allora
il punto medio sta su tale retta.). Invece la seconda può essere
riscritta come proporzione:
a : b = (xP − xP 0 ) : (yP − yP 0 )
ovvero il vettore P~P 0 ha la stessa direzione (non orientata)
di ~v = (a, b) che abbiamo visto a lezione essere appunto perpendicolare
alla retta r.
Si osservi inoltre che s può essere sostituita da qualunque
retta parallela ottenendo la medesima soluzione (il termine
noto f infatti si cancella).
Per completezza, risolviamo dunque il sistema col metodo di riduzione (ricordando che le equazioni sono normalizzate):
2+
2
b
(a
)xP 0 + ac = (b2 − a2 )xP − 2abyP − ac
a2 )yP 0 + bc = −2abxP + (a2 − b2 )yP − bc
(b2+
ovvero:
xP 0 = (b2 − a2 )xP − 2abyP − 2ac
yP 0 = −2abxP + (a2 − b2 )yP − 2bc.
8
4.1
Esempio: riflessione rispetto alla bisettrice del 1◦ e 3◦
quadrante
La retta normalizzata ha equazione:
1
1
√ x+ √ y =0
2
2
e dunque in questo caso la riflessione si ottiene dalle ben note formule (c =
0, a2 = b2 = −ab = 12 ):
1
xP 0 = ( 12 − 12 )x
P − 2 · − 2 yP = yP
yP 0 = −2 · − 12 xP + ( 12 − 12 )yP = xP .
In particolare da queste formule si deduce che:
π
π
− α = cos(α), cos
− α = sin(α).
sin
2
2
4.2
Esempio: riflessione rispetto agli assi cartesiani
Riflettendo rispetto agli assi cartesiani usuali (Esercizio: applicare la formula per la riflessione a tali rette e dedurre le formule seguenti) si ottengono
inoltre le seguenti formule notevoli:
sin(α) = − sin(−α) = − sin(π + α), cos(α) = cos(−α) = − cos(π + α).
5
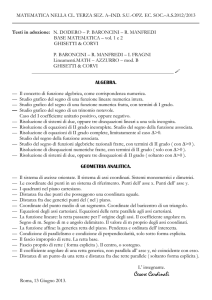
Rotazione intorno all’origine
Ricordiamo innanzitutto la formula fondamentale sin2 + cos2 = 1, per la
quale abbiamo che le rette considerate in questo paragrafo sono già normalizzate. Sia dato un angolo (orientato) α. Ruotando gli assi dell’angolo
−α (e ricordando le ultime relazioni trigonometriche ottenute) otteniamo il
sistema di riferimento (vedi figura):
r = {sin(α)x + cos(α)y = 0}
s = {cos(α)x − sin(α)y = 0}
da cui il cambiamento di coordinate, e quindi anche la rotazione dell’angolo α (fatto importante osservato alla fine del capitolo sul cambiamento di
coordinate), è dato dalle formule:
0
xP = cos(α)xP − sin(α)yP
yP0 = sin(α)xP + cos(α)yP
9
5.1
Applicazione: formule trigonometriche
Se P è il punto della circonferenza goniometrica che corrisponde all’angolo
α e P 0 e lo stesso punto ruotato di un altro angolo β intorno all’origine, che
quindi corrisponde all’angolo α + β, otteniamo che:
cos(α+β) = x0P = cos(α) cos(β)−sin(α) sin(β), sin(α+β) = yP0 = sin(α) cos(β)+cos(α) sin(β).
Ricapitolazione - riassunto dei concetti fondamentali
Rette nel piano cartesiano (ripasso)
• Ripasso1: Due equazioni implicite di una retta rappresentano la stessa retta (ovvero due rette coincidenti) se e solo se si ottengono l’una
dall’altra moltiplicando per una costante diversa da 0.
• Ripasso2: La distanza di un punto P (xP , yP ) da una retta r =
ax + by + c = 0 è:
d(r, P ) =
|axP + byP + c|
√
.
a2 + b2
Distanza con segno da una retta
• Possiamo
quindi normalizzare l’equazione di una retta dividendola per
√
a2 + b2 ed eventualmente cambiandola di segno. In questo caso a2 +
b2 = 1 e quindi la distanza diventa:
d(r, P ) = |axP + byP + c|.
• Togliendo il valore assoluto, otteniamo una distanza con segno che
è positiva nel semipiano indicato dalla “freccetta” (vettore) ~v (a, b) e
negativa (o nulla) altrimenti:
˜ P ) = axP + byP + c.
d(r,
• La distanza con segno è esattamente come sono definite le coordinate
cartesiane (distanza con segno dall’asse y per la coordinata x e distanza
con segno dall’asse x per la coordinata y); pertanto, possiamo generalizzare a due assi cartesiani qualunque (perpendicolari e normalizzati
con verso positivo scelto).
10
• In formule, dati due tali assi {ax + by + c = 0} e {bx − ay + f = 0},
le coordinate di P (xP , yP ) sono semplicemente:
x0P = bxP − ayP + f
yP0 = axP + byP + c
ovvero i polinomi di primo grado delle equazioni in cui si sostituiscono
le coordinate di P .
• Fatto importante (senza dimostrazione): Se una trasformazione
T manda gli assi in T (rx ) e T (ry ), le coordinate utilizzando tali assi
del punto P sono le stesse che ha il punto P 0 , trasformato di P tramite
T −1 (funzione inversa), nel sistema cartesiano standard
• Ad esempio la traslazione di un vettore ~v = (1, 1) manda gli assi in
{x − 1 = 0} e {y − 1 = 0} e con questi assi P (xP , yP ) ha coordinate
x0P = xP − 1 e yP0 = yP − 1; ma queste sono anche le coordinate di P 0
ottenuto traslando P del vettore −~v = (−1, −1). Vedremo qualcosa di
analogo nel caso delle rotazioni (che analizzeremo solo nel caso in cui
il centro di rotazione sia l’origine degli assi).
Funzioni trigonometriche elementari
• Si definiscono coseno e seno di un angolo α come le coordinate del
punto P associato della circonferenza goniometrica (di centro l’origine
e raggio 1). Il loro rapporto, ovvero il coefficiente angolare della retta
OP , è per definizione la tangente (essa non è definita per OP verticale,
ovvero tali angoli non appartengono al dominio della funzione).
• Per gli angoli acuti vale la definizione equivalente come rapporti dei
lati di un triangolo:
– In un triangolo rettangolo il rapporto tra un cateto e l’ipotenusa
è uguale al seno dell’angolo opposto.
– In un triangolo rettangolo il rapporto tra un cateto e l’ipotenusa
è uguale al coseno dell’angolo acuto adiacente.
– In un triangolo rettangolo il rapporto tra i due cateti è uguale alla
tangente dell’angolo opposto al primo.
• Applicazioni/1: La tangente è legata alla nozione di coefficiente angolare, cioè all’equazione esplicita di una retta (non verticale). Come
vedremo più approfonditamente nel prossimo capitoletto, coseno e seno
di un angolo danno i coefficienti dell’equazione implicita normalizzata (infatti danno un vettore di lunghezza 1 che indica il semipiano
positivo).
11
• Applicazioni/2: Come abbiamo appena detto, le funzioni trigonometriche sono legate ai rapporti dei lati di un triangolo rettangolo
(Esercizio: Quanto è lunga una corda sottesa da un angolo al centro α di una circonferenza di raggio r?). Anticipiamo che esse danno
anche luogo a molti altri teoremi che valgono per triangoli qualunque.
• Applicazioni/3: Vale la disuguaglianza (per angoli acuti in radianti):
sin(α) < α < tan(α). Da essa discenderanno alcune proprietà molto
importanti nello studio delle funzioni trigonometriche che verrà fatto
in 4◦ liceo.
Riflessione
• La riflessione rispetto alla retta r = {ax + by + c = 0} soddisfa il
sistema (ottenuto confrontando le distanze con segno da r e da una
retta perpendicolare s):
axP 0 + byP 0 + c = −(axP + byP + c)
bxP 0 − ayP 0 = bxP − ayP
che risolto dà le seguenti formule risolutive (non richieste):
xP 0 = (b2 − a2 )xP − 2abyP − 2ac
yP 0 = −2abxP + (a2 − b2 )yP − 2bc.
• Caso particolare: per la bisettrice del 1◦ e 3◦ quadrante si ritrovano le
ben note formule:
x P 0 = yP
yP 0 = x P
che danno anche le relazioni trigonometriche per angoli complementari:
π
sin
− α = cos(α)
2
π
− α = sin(α).
cos
2
• Le riflessioni rispetto agli assi similmente danno le relazioni sin(α) =
− sin(−α) = − sin(π + α), cos(α) = cos(−α) = − cos(π + α).
Rotazione intorno all’origine
• La rotazione di un angolo (orientato) α è data dalle formule (ottenute
con la formula della distanza con segno dalla retta che forma un angolo
12
−α con l’asse x e dalla sua perpendicolare, entrambe passanti per
l’origine e normalizzate nel modo giusto):
0
xP = cos(α)xP − sin(α)yP
yP0 = sin(α)xP + cos(α)yP
• Da queste si deducono le formule trigonometriche di addizione:
cos(α+β) = cos(α) cos(β)−sin(α) sin(β), sin(α+β) = sin(α) cos(β)+cos(α) sin(β)
dalle quali si può dedurre quasi ogni altra formula trigonometrica.
13