NOTE SULLE ROTAZIONI RIGIDE
(Meccanica Analitica - a.a. 2014/15)
Sommario
1. Vi sono, oltre agli angoli di Eulero, ulteriori sistemi di coordinate lagrangiane idonei a descrivere
il moto di corpi rigidi con punto fisso; vi sono ulteriori rappresentazioni delle rotazioni, equivalenti
a quella descritta dagli elementi di SO(3, R).
2. Il teorema di Eulero prevede che sia sempre possibile raccordare tra loro due configurazioni di
un corpo rigido con punto fisso, mediante una rotazione attorno a una direzione fissa e suggerisce
un’ulteriore scelta di variabili lagrangiane.
3. L’isomorfismo locale
SU (2, C) ≈ SO(3, R)
determina, a partire da una rotazione reale, la trasformazione lineare di uno spinore.
4. Le rotazioni infinitesime commutano tra di loro cosı́ come le velocità angolari.
5. La velocità angolare giace nello spazio tangente al gruppo SO(3, R).
1 Rappresentazione spinoriale degli operatori di rotazione.
1.1 Rappresentazione complessa di un vettore reale.
Un vettore, per es. lo spostamento x = (P − O), oltre che come matrice colonna (con tre elementi
reali) può essere rappresentato con una matrice complessa 2 × 2:
x
z
x − iy
x=
y
←→ P =
.
x + iy
−z
z
Notiamo che la matrice P è hermitiana (P † = P ) e a traccia nulla; viceversa una qualsiasi matrice
hermitiana e a traccia nulla deve avere la forma di P e determina univocamente un vettore. La richiesta
che P sia a traccia nulla, ha come conseguenza che il determinante di P individua il modulo del vettore
x: det P = −||x||2 .
Ci domandiamo ora come si trasforma la matrice P per effetto di una rotazione reale, vale a dire se
A ∈ SO(3, R) trasforma le componenti di x secondo l’usuale equazione
′
x
x
y′ = A y
z′
z
al termine della trasformazione resta individuata la matrice
z′
x′ − iy ′
′
P =
.
x′ + iy ′
−z ′
Qual’è la legge di trasformazione P −→ P ′ ? Per rispondere introduciamo una particolare famiglia di
operatori in campo complesso.
1
1.2 Le matrici di SU(2, C) sono individuate da tre coordinate.
Supponiamo di applicare un operatore lineare a un vettore dello spazio vettoriale bidimensionale C2 .
La trasformazione è del tutto analoga alla rotazione di un vettore nel piano R2 , con la differenza che le
componenti dei vettori e le entrate della matrice che rappresenta l’operatore sono numeri complessi. Ciò
significa che, indicando con w = w1 e1 + w2 e2 un vettore di C2 , la trasformazione lineare, è comunque
rappresentata dalla
′ w1
α β
w1
=
,
w2′
w2
γ δ
dove tutti i numeri che compaiono nell’equazione sono, in linea di principio, complessi.
In modo analogo a quanto già visto per gli operatori di SO(3, R), si può mostrare che le matrici
complesse unitarie
α β
Q=
(QQ† = Q† Q = 1),
γ δ
conservano i moduli dei vettori di C2 . È interessante notare che se all’unitarietà aggiungiamo la richiesta che il determinante di tali matrici sia = +1, possiamo affermare che ciascuna di queste matrici è
individuata dal valore di 3 soli parametri reali. Si lascia al lettore la verifica diretta di:
∗
α β
1 0
α
β
α γ∗
=
Q=
β ∗ δ∗
γ δ
0 1
−β ∗ α∗
=⇒
αα∗ + ββ ∗ = 1.
αδ − βγ = +1
Le matrici Q, unitarie e unimodulari, costituiscono il gruppo SU (2, C), che con SO(3, R) ha per ora in
comune solo il numero di parametri che individuano ciascun elemento del gruppo.
1.3 C’è una corrispondenza (homomorfismo) tra i gruppi SU(2, C) e SO(3, R).
Torniamo alla matrice P precedentemente introdotta. C’è un’interessante legame tra di essa e gli
elementi di SU (2, C): l’azione di una matrice unitaria su P è formalizzata dalla trasformazione di
similitudine
∗
α
β
z
x − iy
α −β
′
†
P = QP Q =
.
(1.1)
−β ∗ α∗
x + iy
−z
β∗ α
Infatti, ricordiamo quanto osservato per le rotazioni reali: la trasformazione x′ = Ax effettuata da A
sui vettori, agisce anche sulle matrici, e lo fa secondo la legge: B ′ = ABAT . Ma la trasformazione di similitudine (1.1) ha una fondamentale proprietà (che si può dimostrare con un calcolo diretto):
conserva l’hermitianità e la traccia (nulla) di P .
Di conseguenza la struttura di P ′ deve essere identica a quella di P :
z′
x′ − iy ′
′
P =
;
x′ + iy ′
−z ′
e, ancora,
2
2
2
det(P ′ ) = det(QP Q† ) = det(P ) =⇒ x′ + y ′ + z ′ = x2 + y 2 + z 2 .
(1.2)
Quest’ultima proprietà è la stessa che caratterizza l’ortogonalità delle matrici di rotazione A. In
sintesi: l’invarianza dei moduli dei vettori x ∈ R3 è un effetto comune dell’applicazione di A al vettore
x e dell’applicazione di Q alla matrice P . La (1.2) definisce l’applicazione tra i due gruppi, e associa a
ogni rotazione in R3 , descritta da una matrice A ∈ SO(3, R), una trasformazione lineare dei vettori di
C2 descritta dalla matrice Q.
2
SU (2, C) e SO(3, R) sono qui descritti in termini di trasformazioni lineari di spazi vettoriali (rispettivamente C2 e R3 ). Le applicazioni degli operatori dei due gruppi rappresentano una stessa operazione
astratta, la rappresentano su insiemi diversi e con operazioni diverse. Affinché le rappresentazioni siano
equivalenti i due gruppi devono essere isomorfi, vale a dire che se indichiamo con
Q2
e Q1
B
e C
rispettivamente due elementi di SU (2, C) e le due rotazioni reali corrispondenti e con φ l’applicazione
che descrive la corrispondenza tra i due gruppi, si deve avere che
C = φ(Q1 ), B = φ(Q2 ) =⇒ BC = φ(Q2 Q1 ) = φ(Q2 )φ(Q1 ),
cosicché al prodotto Q2 Q1 è associato proprio il prodotto BC (la corrispondenza ”conserva” il prodotto). E cosı́ è:
P ′ = Q1 P Q†1 ←→ x′ = Cx
P ′′ = Q2 P ′ Q†2 ←→ x′′ = Bx′
P ′′ = Q2 Q1 P Q†1 Q†2 ←→ x′′ = BCx
1.4 Relazione tra le coordinate di SU(2, C) e quelle di SO(3, R).
Indicando con x− = x − iy e x+ = x + iy, la trasformazione (1.1) implica che
′
∗
x′ −
α z + β ∗ x− −βz + αx−
z
α
β
′
†
P =
= QP Q =
.
−β ∗ α∗
x′ + −z ′
α∗ x+ − β ∗ z −βx+ − αz
Uguagliando termine a termine gli elementi delle matrici si ha infine
′
−(β ∗ )2 x− +(α∗ )2 x+
x + = −2α∗ β ∗ z
x′ = −2αβz
+α2 x−
−β 2 x+
−′
∗
∗
∗
z = (αα − ββ )z +αβ x−
+α∗ βx+
(1.3)
(1.4)
La (1.4) è una trasformazione lineare che connette le componenti (x′ , y ′ , z ′ ) con le (x, y, z) del
vettore x rispetto a due sistemi di coordinate in R3 . Scriveremo x′ = Ax e, per fissare le idee, calcoliamo
la terza riga di A:
i(−αβ ∗ + α∗ β)
αα∗ − ββ ∗ ).
(α∗ β + αβ ∗
È allora possibile scrivere una corrispondenza tra i parametri di Cayley-Klein α, β e gli angoli di Eulero
semplicemente esprimendo la matrice A in entrambi i sistemi di coordinate e poi uguagliando termine
a termine le due matrici A cosı́ scritte. Se resta un dubbio sul fatto che A sia una matrice reale, basta
sostituire
α = e0 + ie3
β = e2 + ie1
(e0 , e1 , e2 , e3 ∈ R)
e la matrice diviene
e20 +e21 −e22 −e23 2(e1 e2 + e0 e3 ) 2(e1 e3 − e0 e2 )
2(e1 e2 − e0 e3 ) e20 −e21 +e22 −e23 2(e2 e3 + e0 e1 ) .
2(e1 e3 + e0 e2 ) 2(e2 e3 − e0 e1 ) e20 −e21 −e22 +e23
Qui abbiamo introdotto i parametri di Eulero ei che sono 4, ulteriori, possibili variabili lagrangiane,
vincolate dalla condizione
e20 + e21 + e22 + e23 = 1.
Dunque esistono, e sono facilmente esplicitabili, relazioni funzionali tra angoli di Eulero e parametri di
Cayley-Klein (o parametri di Eulero).
3
1.5 L’isomorfismo non è globale.
Si può mostrare che la corrispondenza tra SU (2, C) e SO(3, R)è di tipo 2 : 1. Ci basta verificarlo in
un caso elementare, quello di una rotazione piana attorno all’asse Oz. In tal caso, detto φ l’angolo della
rotazione, si ha
x′ + = x cos φ + y sin φ + i(−x sin φ + y cos φ) = x(cos φ − i sin φ) + iy(cos φ − i sin φ) = e−iφ x+
x′ − = x cos φ + y sin φ − i(−x sin φ + y cos φ) = x(cos φ + i sin φ) − iy(cos φ + i sin φ) = eiφ x−
z ′ = z.
Tenendo conto delle (1.4), si ottiene che
α2 = eiφ .
β = 0;
La corrispondenza SU (2, C) e SO(3, R) associa dunque tra loro le seguenti matrici:
iφ/2
cos φ sin φ 0
e
0
Qφ =
←→ A = − sin φ cos φ 0 .
0
e−iφ/2
0
0
1
Se consideriamo due rotazioni, in particolare φ = 2π e φ = 4π, a ciascuna di esse corrisponde una
matrice distinta di SU (2, C):
−1 0
1 0
Q2π =
Q4π =
= −Q2π ,
0 −1
0 1
mentre è del tutto evidente che per entrambe le rotazioni
A = I.
Generalizzando questo caso, si può mostrare che la corrispondenza è tra ogni A ∈ SO(3, R) e una
coppia di matrici (Q, −Q) di SU (2, C). Parleremo allora di homomorfismo, in quanto la biunivocità
dell’applicazione non è rispettata.1
1.6 Q si esprime mediante i parametri di Eulero e le matrici di Pauli.
Se introduciamo le parentesi di Pauli σ i , una generica matrice di SU (2, C) si scrive come segue:
Q=
α = e0 + ie3
β = e2 + ie1
γ = −(e2 − ie1 ) δ = e0 − ie3
= e0
1
0
0
1
0
+ie1
1
1
0
0
+ie2
i
−i
0
1
+ie3
0
0
−1
= e0 1 + ie · σ.
Nel caso specifico di una rotazione piana attorno all’asse z, per come abbiamo già trattato il caso, si
può scrivere:
φ
φ
Qφ = 1 cos + iσ 3 sin .
2
2
Le stesse matrici di Pauli forniscono una decomposizione particolarmente sintetica delle matrici
hermitiane a traccia nulla. Dalla definizione, si ha che
0 1
0 −i
1
0
P =x
+y
+z
= x · σ.
1 0
i
0
0 −1
1
Si può anche parlare di isomorfismo locale nel senso che la biunivocità vale tra un aperto di SU (2, C) contenente Q (cosı́
come un aperto contenente −Q!) e uno di SO(3, R) contenente A.
4
2 Il teorema di Eulero
Supponiamo che un corpo rigido con un punto fisso, posizionato inizialmente in una configurazione
C0 , si trovi dopo un intervallo di tempo (t − t0 ) in una configurazione Ct , seguendo una qualunque
evoluzione temporale. Il teorema di Eulero, in pratica, ci assicura che si può sempre individuare una
rotazione (attorno a un asse fissato) che connetta queste configurazioni. Questo significa che la reale
evoluzione temporale del corpo è matematicamente equivalente a tale rotazione (istante per istante,
l’asse di rotazione, nell’evoluzione reale, potrebbe cambiare direzione).
Alla dimostrazione del teorema, premettiamo il seguente
Lemma: Ogni matrice A ∈ SO(3, R) ha (almeno) un autovalore uguale a +1.
Dim.: gli autovalori di A sono le radici dell’equazione di terzo grado a coefficienti reali det(A−λI) = 0.
Le radici sono: o tutte reali, o una reale e due tra loro complesse coniugate. La teoria degli operatori
lineari2 dimostra che A, essendo ortogonale, è sempre diagonalizzabile con una trasformazione di similitudine e che gli autovalori {λ1 , λ2 , λ3 }, che si trovano sulla diagonale, sono di modulo unitario. Inoltre,
essendo A unimodulare, ne segue che
λ1 λ2 λ3 = +1.
Se λ è una radice reale e x è un autovettore reale non nullo, allora dalla condizione di ortogonalità e
dall’equazione agli autovalori Ax = λx, si ha che
kAxk2 = kxk2
e kAxk2 = |λ|2 kxk2 =⇒ λ = ±1.
Se tutte le radici sono reali, esse sono (1, 1, 1) o (1, −1, −1), per l’unimodularità di A. Altrimenti, se
due autovalori sono complessi, devono essere della forma λ2,3 = e±iΦ ; ne consegue che
λ∗2 = λ3 =⇒ |λ2 |2 = 1 = λ2 λ∗2 = λ2 λ3 ;
anche in tal caso la condizione sul determinante di A comporta λ1 = +1.
Teorema di Eulero: Ogni matrice A ∈ SO(3, R), A 6= I, è una rotazione di un angolo Φ attorno a un
asse n.
Dim.: il precedente lemma ci assicura che la matrice A ha un autovettore n con autovalore 1: An = n.
La retta individuata da n è invariante rispetto alla rotazione. Sia π il piano ortogonale a tale retta:
π = {y|n · y = 0}.
Poiché A è ortogonale, A(π) = π. Indicando con e1 , e2 una base ortogonale su π, relativamente alla
terna n, e1 , e2 , A è rappresentata dalla matrice
1 0
0
A = 0 a1 a2 .
0 a3 a4
a1 a2
′
D’altra parte, per le proprietà di A, la matrice
A =
a3 a4
è evidentemente ortogonale e speciale, dunque appartiene a SO(2, R), il gruppo delle rotazioni piane.
Quindi A è una rotazione attorno alla direzione individuata da n (detta asse di rotazione).
Come corollario del teorema di Eulero, possiamo affermare che:
Ogni matrice A ∈ SO(3, R) può essere scritta, in una qualche base ortonormale, come
2
Per una trattazione dettagliata, si veda p.es. il libro di testo a pp. 150-152.
5
1
0
0
A = 0 cos Φ sin Φ .
0 − sin Φ cos φ
La descrizione di una rotazione di un corpo rigido con punto fisso, è qui realizzata mediante nuove
coordinate lagrangiane: due variabili individuano la direzione del versore n dell’asse di rotazione, una
terza coordinata è proprio l’angolo Φ della rotazione attorno a tale asse. Dall’invarianza della traccia per
trasformazioni di similitudine, è facile mostrare che l’angolo Φ è proprio l’argomento degli autovalori
complessi.
Osservazione: le coppie (n, Φ) e (−n, −Φ) rappresentano la medesima rotazione. Si può dunque
restringere l’angolo all’intervallo [0, π].
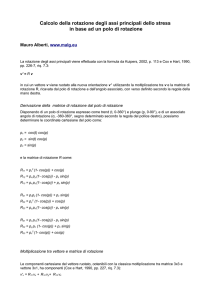
Ci proponiamo ora di esplicitare mediante queste nuove variabili lagrangiane la relazione lineare tra
le componenti di x e x′ , vale a dire dei vettori posizione che individuano i punti del corpo rigido prima
e dopo la rotazione3 . A tal fine, analizziamo la decomposizione dei vettori qui sotto illustrata:
N
V
9Φ z
s Q
P
N
′
x
x
=Φ
x∧n
n(n · x)
P
R?
?
n
V-
Q
Qui vediamo la rotazione del punto P dall’alto. V è il piede della perpendicolare
tracciata da Q a (P − N ).
O
nella figura di sinistra il generico vettore spostamento x = (P − O) viene ruotato in senso orario nel
vettore x′ = (Q − O). Quest’ultimo, come è evidente dalla figura, si decompone anche in:
(Q − O) = (N − O) + (V − N ) + (Q − V ).
Valutiamo separatamente ciascuno di questi componenti:
➀ (N − O) = [(P − O) · n]n, essendo (P − O) · n la proiezione di (P − O) lungo l’asse di n.
➁ k(V − N )k = k(Q − N )k cos Φ = k(P − N )k cos Φ =⇒
(V − N ) = (P − N ) cos Φ = [(P − O) − (N − O)] cos Φ = [x − n(x · n)] cos Φ
➂ k(Q − V )k = k(Q − N )k sin Φ = k(P − O) ∧ nk sin Φ =⇒ (Q − V ) = (x ∧ n) sin Φ.
In totale,
(Q − O) = (x · n)n + [x − (x · n)n] cos Φ + (x ∧ n) sin Φ.
Riordinando, abbiamo:
x′ = x cos Φ + (x · n)n(1 − cos Φ) + (x ∧ n) sin Φ.
3
(2.1)
Si noti che, approfondendo tale analisi, sarebbe ovviamente possibile scrivere equazioni di trasformazione tra questi nuovi
parametri e le coordinate di SU (2, C) e SO(3, R) già studiate.
6
3 Commento: perché studiare SU (2, C)?
Nel passaggio dalla Cinematica alla Meccanica del corpo rigido, in realtà ben poco degli sviluppi
teorici qui presentati saranno utilizzati per scrivere e risolvere le corrispondenti equazioni differenziali
del moto. Ciò nonostante si richiama l’attenzione sulla rappresentazione delle rotazioni in termini degli
operatori di SU (2, C) per i seguenti motivi:
1. Le coordinate naturali per descrivere gli elementi di questo gruppo (siano esse i parametri di
Cayley-Klein o quelli di Eulero) sono coordinate lagrangiane, alternative agli angoli di Eulero.
L’introduzione del gruppo complesso ha permesso di esemplificare in modo non banale la possibilità di ricorrere a sistemi di coordinate lagrangiane tra loro distinti per descrivere uno stesso
sistema meccanico.
2. È possibile scrivere equazioni di trasformazione tra le coordinate lagrangiane
(φ, θ, ψ)
(e0 , e1 , e2 , e3 )
(n, Φ)
ed esprimere le matrici di SO(3, R) mediante i parametri di Eulero: dal punto di vista pratico
questa sostituzione può risultare conveniente, in quanto gli elementi delle matrici, piuttosto che in
termini di funzioni trigonometriche, sono formati da semplici polinomi di secondo grado.
3. Nella descrizione quanto meccanica, l’equazione del moto (che non è piú l’equazione di Newton)
non determina la posizione della particella, bensı́ la funzione d’onda (una funzione complessa)
Ψ(x, t),
che fornisce l’ampiezza di probabilità, o piú precisamente, la probabilità dP(x, t) della particella
di trovarsi all’istante t nell’elemento di volume dx dy dz che circonda il punto x:
dP(x, t) = C|Ψ(x, t)|2 dx dy dz,
C essendo una costante di normalizzazione.
D’altra parte, in Meccanica Quantistica, alle particelle è attribuito un momento angolare totale che
somma due contributi: quello orbitale (che è il momento angolare classico, prodotto del vettore
spostamento e della quantità di moto) e un momento intrinseco detto di spin. Questa grandezza può
assumere valori discreti e a particelle come l’elettrone si associano due possibili numeri quantici:
1
2
o
1
− .
2
Questo è il motivo per cui all’elettrone si associa, piuttosto che una singola funzione d’onda, una
coppia di funzioni d’onda, o meglio, una funzione d’onda a due componenti:
Ψ(x, + 12 )
Ψ+
Ψ=
=
Ψ(x, − 12 )
Ψ−
(le due componenti sono dette con spin up e con spin down).
Dal punto di vista formale, questa funzione è proprio un vettore complesso di C2 come quello a cui
abbiamo applicato la trasformazione lineare Q ∈ SU (2, C). Questi vettori hanno dunque un’importante applicazione in Fisica e per essi Ehrenfest coniò nel 1929 il termine spinori. Una loro
caratteristica, che abbiamo già precedentemente individuato, è che sono invarianti per rotazioni
pari a 2n(2π) mentre per un numero dispari di 2π uno spinore Ψ è trasformato in −Ψ.
7
Ribadiamo quest’ultimo punto: abbiamo mostrato che la rotazione in R3 , descritta da operatori di
SO(3, R),
x′ = Ax,
è rappresentata in campo complesso dalla trasformazione di similitudine
P ′ = QP Q† ,
dove, si deve ricordare, P ′ e P rappresentano x′ e x, rispettivamente.
E fino qui, l’operatore Q ha un ruolo di operatore di rotazione sulle coordinate di x. Ma le matrici Q
sono anche le matrici di rotazione della Meccanica Quantistica, nel senso che, in corrispondenza a una
rotazione reale, la funzione d’onda di un elettrone con spin si trasforma proprio secondo la legge lineare
Ψ+
Ψ−
′
=Q
Ψ+
Ψ−
e Q deve essere un elemento di SU (2, C), perché solo cosı́ è garantita l’invarianza del modulo dello
spinore e, dunque, della probabilità che una particella si trovi in una certa configurazione.
4 Osservazioni sulle rotazioni infinitesime.
Se una trasformazione è infinitesima, cioè se la differenza tra i vettori posizione
dx = x′ − x
è valutata trascurando i contributi superiori al primo ordine di approssimazione, l’equazione di trasformazione (2.1) si riduce a
x′ = x + (n ∧ x)dΦ,
(4.1)
dove cos Φ è stato approssimato a 1 e sin Φ a dΦ; inoltre si è fatto uso di una convenzione sui segni
opposta alla precedente: la trasformazione consiste ora in una rotazione (attiva) dei vettori in senso
antiorario (Φ → −Φ).
D’altra parte, l’approssimazione al primo ordine della matrice A nella formula della rotazione x′ =
Ax si effettua mediante la matrice della trasformazione infinitesima ε:
x′ = (1 + ε)x
(=⇒ dx = εx).
(4.2)
Per fissare le idee, consideriamo una rotazione piana e ne sviluppiamo al primo ordine di approssimazione la matrice, indicando con dΦ la variazione infinitesima dell’angolo :
cos Φ
sin Φ 0
1 0 0
0
dΦ 0
A = − sin Φ cos Φ 0 = 0 1 0 + −dΦ 0 0 ;
0
0
1
0 0 1
0
0 0
quest’ultima è la matrice ε che fornisce la variazione infinitesima dx.
La matrice ε gode evidentemente delle seguenti proprietà:
(1 + ε1 )(1 + ε2 ) = (1 + ε2 )(1 + ε1 ) (le rotazioni infinitesime commutano);
(1 + ε)(1 − ε) = 1 (la rotazione inversa è 1 − ε);
εT = −ε (ε è antisimmetrica).
8
In base a quest’ultima proprietà, e tenendo conto della (4.1), ε, espressa mediante le coordinate n e Φ, è:
3
0
−n3 n2
X
ε = n3
0
−n1 dΦ =
ni Mi dΦ = n · MdΦ
(4.3)
i=1
−n2 n1
0
dove
0 0
0
M1 = 0 0 −1 ,
0 1
0
0 0 1
M2 = 0 0 0 ,
−1 0 0
0 −1 0
0 0 .
M3 = 1
0
0 0
L’identificazione della (4.1) con la (4.2) è basata sul (noto) isomorfismo tra lo spazio vettoriale delle
matrici antisimmetriche 3 × 3 e i vettori di R3 . Ricordando che tutti i punti di un corpo rigido sono
trascinati da un sistema a esso solidale con velocità
ẋ = ω ∧ x,
ω essendo la velocità angolare del corpo rigido rispetto a un osservatore fisso, vale a dire la velocità
angolare di un qualunque sistema solidale con il corpo rigido rispetto a un sistema fisso nello spazio, si
ha che
dx = ωdt ∧ x,
che, confrontata con la (4.1), implica
ωdt = ndΦ.
Proprietà importante: Le rotazioni finite non sono commutative; le rotazioni infinitesime (e con esse
le velocità angolari) lo sono.
Per dimostrare tale proprietà, indichiamo con C e B due successive rotazioni. Indichiamo con A =
BC la rotazione totale4 . A queste rotazioni associamo, piuttosto che le relative velocità angolari, le
matrici antisimmetriche di rotazione:
A −→ Ω = ȦAT ;
B −→ ΩB = ḂB T ;
C −→ ΩC = ĊC T .
Tenendo conto dell’ortogonalità delle trasformazioni, si ottiene
Ω = ȦAT = (ḂC + B Ċ)C T B T = ḂB T + B ĊC T B T .
Il secondo termine dell’ultimo membro rappresenta una trasformazione di similitudine della matrice ΩC
che ne trasforma le componenti nel sistema finale, quello raggiunto con la rotazione B. Tradotto in
termini di velocità angolari, si ha
ωA = ω B + ωC ,
che chiaramente è una relazione commutativa.
Poiché le velocità angolari sono vettori, la velocità angolare totale di un corpo rigido soggetto a piú
rotazioni si calcola come nel seguente esempio, facendo uso dell’ordinaria somma vettoriale.
4
nel caso generale, ovviamente, BC 6= CB.
9
z
6
φ̇
6
O-j
u
x
Un disco ruota attorno alla
retta Or con velocità angolare θ̇. A sua volta, la retta Or
ruota attorno all’asse Oz con
velocità angolare φ̇.
y
R
θ̇
k
Z
6
k
G
Y
Kθ
r
Istante per istante il corpo rigido è soggetto a due rotazioni, descritte da due angoli di Eulero: la rotazione
C (per riferirci alla proposizione precedente) ruota Ox di un angolo φ in Or; B ruota di un angolo θ
Oyz in GY Z e le due corrispondenti velocità angolari sono
θ̇u,
e φ̇k.
Conviene sempre riferirsi a un unico osservatore: se GXY Z (con GX = Gr) è un sistema solidale con
il disco, avremo che le velocità angolari sono
θ̇I,
e φ̇ sin θJ + φ̇ cos θK.
Rispetto al sistema inerziale Oxyz, avremo d’altra parte che le velocità angolari si decompongono
come:
θ̇ cos φi + θ̇ sin φj, e φ̇k.
Un’ulteriore applicazione dei risultati teorici consiste nella descrizione di una rotazione infinitesima
come somma vettoriale delle tre derivate temporali degli angoli di Eulero, ciascuna moltiplicata per il
corretto versore:
′
ω(t) = φ̇e3 + θ̇e1 + ψ̇E3 ,
dove la successione delle rotazioni della terna di versori è
φ
′
θ
ψ
ei −→ ei −→ e”i −→ Ei
(i = 1, 2, 3).
Allora, ruotiamo (in senso passivo) tutti i versori su una stessa base, per esempio quella iniziale,
cos φ − sin φ 0
1
cos φ − sin φ 0
1
0
0
0
′
e1 −→
sin φ cos φ 0
0
E3 −→
sin φ cos φ 0
0 cos θ − sin θ
0
0
0
1
0
0
0
1
0 sin θ cos θ
1
di modo che si ottiene la nota relazione:
ω1
0
cos φ
sin φ sin θ
ω2 = φ̇ 0 + θ̇ sin φ + ψ̇ − sin θ cos φ .
ω3
1
0
cos θ
Osservazione: la velocità angolare non è una funzione integrabile degli angoli di Eulero e delle loro
derivate temporali, non si può esprimere come la derivata totale rispetto al tempo di una funzione
degli angoli di Eulero.
Supponiamo per assurdo che
d
ω = Λ(φ, θ, ψ).
dt
10
Per fissare le idee, consideriamo la prima componente di ω, e valutiamo la conseguenza dell’ipotesi:
ω1 = θ̇ cos φ + ψ̇ sin φ sin θ =
da cui
∂Λ1
= cos φ,
∂θ
∂Λ1
∂Λ1
∂Λ1
φ̇ +
θ̇ +
ψ̇,
∂φ
∂θ
∂ψ
∂Λ1
= sin φ sin θ;
∂ψ
ma queste relazioni sono tra loro incompatibili: basta derivare la prima rispetto a ψ, la seconda rispetto
a θ e confrontare i risultati. Conseguentemente ω1 non è una velocità generalizzata.
5 ω è tangente a SO(3, R).
La caratteristica di gruppi come SO(3, R) e SU (2, C) è di essere continui (sono Gruppi di Lie).
SO(3, R)
C
z A = BC
*
B
R
6
-
t=0
A(t)
A(0)
Gli elementi del gruppo sono matrici le cui entrate variano con continuità e con regolarità; ogni ”punto” di questo
spazio è un operatore di rotazione ed è individuato da tre
coordinate. Mediante l’operazione di prodotto tra matrici,
a ogni coppia di matrici si associa la matrice prodotto.
Su SO(3, R) tracciamo curve parametrizzate dal tempo: esse rappresentano l’evoluzione temporale di un
operatore al variare continuo delle sue entrate. Per
fissare le idee, pensiamo che inizialmente un sistema di riferimento solidale con un corpo rigido con
punto fisso coincida con quello inerziale. La matrice A, che descrive nel tempo le successive rotazioni
del corpo rigido al variare continuo degli angoli di Eulero (θ(t), φ(t), ψ(t)), è all’istante iniziale la matrice
identità:
A(0) = I.
Se differenziamo la curva A = A(t) rispetto al tempo nel punto iniziale, otteniamo
dA(t) Ȧ(0) =
dt t=0
che è un vettore tangente alla curva nell’origine5 . Come già sappiamo, dall’ortogonalità di A,
T
A(t)AT (t) = I =⇒ A(t)ȦT (t) + Ȧ(t)AT (t) = 0 =⇒ ȦT (t)AT (t) + Ȧ(t)AT (t) = 0
5
se facciamo partire dallo stesso punto altre curve parametrizzate B = B(t), C = C(t) etc., a ciascuna curva associamo
un vettore tangente, per cui nell’origine delle curve resta definito uno spazio vettoriale 3-dimensionale. Tale spazio tangente a
SO(3, R) viene indicato col simbolo so(3, R).
11
segue l’antisimmetria della matrice Ω(t) = Ȧ(t)AT (t). In particolare, l’antisimmetria di tale matrice
calcolata all’istante iniziale, quando A(0) = I:
ΩT = −Ω = (ȦAT )T =⇒ ȦT (0) = −Ȧ(0) = −Ω(0).
Nell’intorno del punto iniziale, per un intervallo infinitesimo di tempo dt,
Ȧ(0) ≈
A(dt) − A(0)
;
dt
al primo ordine di approssimazione, per un elemento di SO(3, R) prossimo all’identità (in senso infinitesimo), si ha
A(dt) = I + dtȦ(0)
(5.1)
Dunque, la velocità angolare (matrice o vettore) rappresenta un elemento infinitesimo di SO(3, R), tangente a una curva parametrizzata dal tempo. Viceversa, assegnata una velocità angolare, è possibile
determinare la curva di SO(3, R) a cui essa è tangente? La risposta risiede nella cosiddetta mappa
esponenziale che connette i vettori tangenti nell’identità con gli elementi del gruppo. Per esplicitarla,
τ
scriviamo l’infinitesimo dt come , con τ numero reale finito, e, dalla (5.1),
n
n
τ
n
A (dt) ≈ I + Ȧ(0) ≈ eτ Ȧ(0) .
n
Questo è un risultato generale e, a titolo di esempio, lo applichiamo ai vettori dello spazio tangente
(indicato con su(2, C)) di SU (2, C), per esprimere l’operatore Q come esponenziazione di un vettore.
Nel caso specifico, già esaminato, di una rotazione piana attorno all’asse z, abbiamo che:
φ
φ
+ iσ 3 sin .
(5.2)
2
2
Introduciamo ora la definizione di esponenziazione di matrici, sotto la forma di uno sviluppo in serie
che ricalca quello della funzione ex :
Qφ = 1 cos
eB = 1 + B +
1 2
1
B + B3 + · · ·
2!
3!
dove B 2 = BB, B 3 = BB 2 . . . etc. Secondo tale definizione,
2
3
φ
iσ3 (φ/2)
2 1 2 φ
3 1 3 φ
+ i σ3
e
= 1 + iσ3
+ i σ3
+ ···
2
2!
2
3!
2
Siccome poi le matrici di Pauli soddisfano, come è immediato provare direttamente,
σi σk = −σk σi
σi2 = 1,
i 6= k,
i = 1, 2, 3,
la precedente esponenziazione può essere riscritta come
2
3
4
φ
1
φ
1
φ
1
φ
eiσ3 (φ/2) = 1 + iσ3
− 1
− i σ3
+ 1
+ ···
2
2!
2
3!
2
4!
2
Raccogliendo a fattor comune la matrice identità e la matrice di Pauli e riconoscendo gli sviluppi in serie
delle funzioni seno e coseno, si mostra facilmente che l’esponenziazione converge al termine di destra
della (5.2), vale a dire che
Qφ = eiσ3 (φ/2) .
12