Capitolo 1
Classificazione delle superfici
compatte
1.1 Alcuni risultati topologici
Siano X uno spazio topologico ed Y un insieme, e sia f : X → Y una funzione
surgettiva.
Definizione 1.1. Si dice topologia quoziente su Y indotta da X attraverso f (o più
brevemente topologia quoziente su Y ) la topologia i cui aperti sono definiti nel modo
seguente:
U
aperto di
Y
⇐⇒
f −1 (U )
aperto di X
(1.1)
Si dimostri per esercizio che: i) la 1.1 definisce effettivamente una topologia su Y ; ii)
la topologia quoziente indotta da X attraverso f su Y è la topologia più fine che rende
continua l’applicazione f .
Si osservi inoltre che la topologia quoziente su Y è tale che: se X è compatto allora Y
è compatto; se X è connesso allora Y è connesso; se X è connesso per archi allora Y
è connesso per archi.
Proposizione 1.2. Siano X e Y due spazi topologici, e sia τ la topologia di Y . Sia
f : X → Y una funzione continua surgettiva. Se f è chiusa (o aperta), allora τ
coincide con la topologia quoziente indotta da X su Y attraverso f .
Dimostrazione. Sia σ la topologia quoziente di Y . Se C è un chiuso (un aperto) di σ,
per definizione si ha che f −1 (C) è chiuso (aperto) in X. Poiché f è chiusa (aperta), si
ha che f (f −1 (C)) = C risulta un chiuso (aperto) di τ .
QED
Teorema 1.3. Sia X uno spazio di Hausdorff, compatto e sia f : X → Y una funzione
surgettiva. Se Y ha la topologia quoziente indotta da X attraverso f , allora le seguenti
condizioni sono equivalenti:
1
Classificazione superfici compatte
i) Y è uno spazio di Hausdorff;
ii) f è chiusa;
iii) l’insieme F = {(x1 , x2 ) ∈ X × X : f (x1 ) = f (x2 )} è chiuso in X × X con la
topologia prodotto.
Dimostrazione. i) =⇒ ii). Sia C un chiuso di X. Poiché X è compatto, C è compatto.
La continuità di f implica che f (C) è compatto in Y . Essendo Y di Hausdorff, f (C)
risulta chiuso in Y .
ii) =⇒ iii). Sia DX = {(x, x) ∈ X × X : x ∈ X} la diagonale di X × X. È noto
che DX è chiuso per la topologia prodotto di X × X se, e solo se, X è di Hausdorff
(vedi, ad esempio, [1]). Essendo dunque DX chiuso ed essendo f chiusa per ipotesi,
si ha che (f × f )(DX ) è chiuso per la topologia prodotto di Y × Y , cioè si ha che
(f × f )−1 ((f × f )(DX )) è chiuso per la topologia prodotto di X × X. Per concludere
si osservi che (f × f )−1 ((f × f )(DX )) = F .
iii) =⇒ i). Poiché F = (f × f )−1 ((f × f )(DX )), l’ipotesi F chiuso nella topologia
prodotto di X × X implica che (f × f )(DX ) è chiuso nella topologia prodotto della
topologia quoziente di Y × Y . Dall’ipotesi che f è surgettiva segue immediatamente
che (f × f )(DX ) = DY = {(y, y) ∈ Y × Y : y ∈ Y }, e dunque che la diagonale DY
di Y è chiusa. Pertanto Y risulta di Hausdorff.
QED
Il teorema 1.3 sarà molto usato nel seguito, nel caso particolare in cui sia data una
relazione di equivalenza ∼ sullo spazio topologico compatto e di Hausdorff X ed in
cui l’applicazione f sia la proiezione sul quoziente: quando interesserà sapere se lo
spazio quoziente X/∼ è di Hausdorff, basterà verificare se l’insieme F = {(x1 , x2 ) ∈
X × X : f (x1 ) = f (x2 )} (che in questo caso è il grafico della relazione ∼) è chiuso o
meno.
L’elementare risultato che segue sta alla base della costruzione dell’operazione di “taglia e incolla”.
Lemma 1.4. Sia X uno spazio topologico unione di due insiemi chiusi (o aperti) A e
B. Siano g : A → Y e h : B → Y due applicazioni continue (per la topologia indotta)
di A e B in uno spazio topologico Y , tali che
g|A∩B = h|A∩B
Allora l’applicazione k : X → Y definita dalla
k|A = g
,
k|B = h
è continua.
Dimostrazione. Siano A e B chiusi in X, e sia C un chiuso di Y . Poiché
k−1 (C) = g−1 (C) ∪ h−1 (C)
2
Classificazione superfici compatte
e poiché g−1 (C) e h−1 (C) sono chiusi in A e in B - e quindi sono chiusi in X l’insieme k−1 (C) è chiuso in X. Dunque k è continua. Una analoga argomentazione
prova il teorema nel caso in cui A e B siano aperti.
QED
Ricordando che un’unione di aperti è aperta, il lemma 1.4 può generalizzarsi nel modo
seguente:
Lemma 1.5. Sia {Ai } un ricoprimento aperto dello spazio topologico X, e siano
fi : Ai → Y applicazioni continue (per la topologia indotta) da Ai in uno spazio
topologico Y , tali che
(fi )|Ai ∩Aj = (fj )|Ai ∩Aj
per tutti gli indici i e j. Allora l’applicazione h : X → Y definita dalle
h|Ai = fi
è continua.
1.2 L’operazione di taglia e incolla
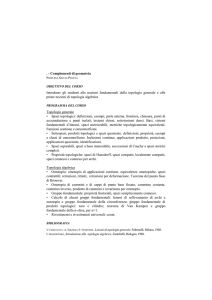
Si consideri nel piano un poligono convesso (chiuso) P . Sia d una sua corda, e siano
P1 e P2 i due poligoni convessi (chiusi) tali che
P1 ∪ P2 = P
P1 ∩ P2 = d
Si applichino a P1 e a P2 , rispettivamente, due movimenti rigidi s1 e s2 del piano, in
modo che s1 (P1 ) = Q1 e che s2 (P2 ) = Q2 siano tra loro disgiunti. Sia Q = Q1 ∪ Q2 .
Q
P
Q2
d
P1
P2
d1
d2
Q1
Figura 1.1: operazione del “taglia e incolla”
Si indichi con ∼ la relazione di equivalenza su Q così definita:
x ∼ y se e solo se:
x = y oppure
3
Classificazione superfici compatte
−1
x ∈ s1 (d), y ∈ s2 (d), s−1
1 (x) = s2 (y) oppure
−1
x ∈ s2 (d), y ∈ s1 (d), s2 (x) = s−1
1 (y)
Il risultato seguente definisce l’operazione di “taglia e incolla” sui poligoni del piano:
Lemma 1.6 (del “taglia e incolla”). Il poligono chiuso P dotato della topologia
indotta da R2 è omeomorfo al quoziente Q/∼ dotato della topologia quoziente.
−1
Dimostrazione. Siano r1 = s−1
1 e r2 = s2 gli inversi dei movimenti rigidi sopra
definiti. Sia r : Q → P la funzione definita come
r|Q1 = r1
e r|Q2 = r2
La funzione r risulta continua grazie al lemma 1.4. Inoltre lo spazio Q/∼ è di Hausdorff: infatti, se π è la proiezione canonica di Q sul quoziente Q/∼ , l’insieme
{(x1 , x2 ) ∈ Q × Q : π(x1 ) = π(x2 )}
risulta uguale all’unione C1 ∪ C2 ∪ C3 , dove C1 = {(x, x) ∈ Q × Q : x ∈ Q}, dove
C2 = {(s1 (p), s2 (p)) : p ∈ d} e dove C3 = {(s2 (p), s1 (p)) : p ∈ d}. L’insieme
C1 è chiuso perché Q è di Hausdorff. L’insieme C2 è compatto perché immagine della
corda d di P - che è compatta - attraverso la funzione continua s1 × s2 ; poiché lo spazio
Q × Q è di Hausdorff, C2 è chiuso. Per un’analoga ragione C3 risulta chiuso.
Dunque C1 ∪ C2 ∪ C3 è chiuso, e pertanto Q/∼ è di Hausdorff, grazie al teorema 1.3.
In conclusione P , Q e Q/∼ sono tre spazi topologici di Hausdorff e compatti.
La funzione r risulta costante sulle classi di equivalenza della relazione ∼, e dunque è
ben definita una funzione re : Q/∼ → P (vedi fig. 2) tale che re ◦ π = r.
Si vuol provare che re è un omeomorfismo di Q/∼ su P . La funzione r è chiaramente
biunivoca, e si ha:
i) re è continua: se C è un chiuso di P , allora r −1 (C) è un chiuso di Q perché r è
continua, e dunque è un compatto; allora π(r −1 (C)) = C è un compatto di Q/∼
poiché π è continua, e dunque è un chiuso perché Q/∼ è di Hausdorff.
ii) re è chiusa: sia infatti K un chiuso di Q/∼ ; K è anche compatto perché Q/∼ è un
compatto. Allora, poiché re è continua, l’insieme re(K) è un compatto di uno spazio di
Hausdorff, ed è pertanto un chiuso.
QED
In quel che segue accadrà spesso di dover “incollare” tra loro poligoni chiusi del piano
mediante relazioni di equivalenza che identificano lati di poligoni diversi in modo non
lineare. Questo tipo di operazione si giustifica mediante i seguenti risultati:
Lemma 1.7. Sia dato un triangolo T del piano e siano l, t ed s i suoi lati. Sia assegnato
un omeomorfismo φ di l su l, che fissi gli estremi di l. Esiste allora un omeomorfismo
Φ del triangolo T su se stesso tale che Φ|l = φ, e che Φ|t = Φ|s = id
Dimostrazione. A meno di isomorfismi lineari, si può supporre che T sia rettangolo
isoscele, con i cateti l e s di lunghezza unitaria piazzati, rispettivamente, lungo l’asse y
ed x di un sistema di riferimento cartesiano ortogonale (vedi figura 1.2).
4
Classificazione superfici compatte
1
t
l
T
s
1
Figura 1.2: triangolo relativo al “taglia e incolla non lineare”
L’omeomorfismo φ del lato l su se stesso si può scrivere come:
(0, y) 7→ (0, ϕ(y))
(0 ≤ y ≤ 1)
con ϕ omeomorfismo dell’intervallo [0, 1] su se stesso tale che ϕ(0) = 0 e ϕ(1) = 1.
Si ponga
y
0 ≤ x < 1, 0 ≤ y ≤ 1 − x
(x, (1 − x)ϕ( 1−x ))
Φ(x, y) =
(1, 0)
per x = 1 e y = 0
L’applicazione Φ risulta un omeomorfismo di T su se stesso e soddisfa le richieste
dell’enunciato del lemma (esercizio).
QED
Proposizione 1.8 (del “taglia e incolla non lineare”). Sia assegnato un poligono convesso R del piano ed un triangolo T esterno ad esso. Sia dato un omeomorfismo φ di
uno dei lati del poligono, d1 , su uno dei lati del triangolo, d2 . Sia ∼ la relazione di
equivalenza di identificazione
x ∼ φ(x)
∀x ∈ d1
Il quoziente (R ∪ T )/∼ è omeomorfo allo spazio ottenuto operando una omotetia ed
un movimento rigido sul triangolo T che porta il lato d2 di T a coincidere con il lato
d1 di R, ed il terzo vertice di T nella regione esterna a R.
Dimostrazione. A meno di una omotetia del triangolo T , si può supporre d2 della
stessa lunghezza di d1 . Sia ora r un movimento rigido del piano che trasforma T in un
5
Classificazione superfici compatte
ϕ
T
d2
d1
R
Figura 1.3: attaccamento del triangolo T nel “taglia e incolla non lineare”
triangolo T ′ in modo che il lato r(d2 ) di T ′ venga a coincidere con il lato d1 di R e che
il terzo vertice di T sia portato in un punto esterno a R. La funzione
χ = r −1 ◦ φ−1
è un omeomorfismo di d2 su se stesso che si può supporre a estremi fissi. Grazie al
lemma 1.7 esiste un omeomorfismo Θ di T su se stesso tale che Θ|d2 = χ. Allora per
il poligono R ed il triangolo Θ(T ) vale quanto stabilito nel lemma 1.6, con l’uso del
movimento rigido r, e si conclude la dimostrazione.
QED
Il risultato appena dimostrato del “taglia e incolla non lineare” sarà nel seguito usato in situazioni molto piu‘ generali (“incollamento” mediante omeomorfismo di bordi
di superfici cilindriche limitate e chiuse nello spazio, “incollamento” mediante omeomorfismo di componenti del bordo di superfici a bordo, etc.). La dimostrazione del
“Lemma del taglia ed incolla non lineare” in queste situazioni più generali non ha né
maggiori difficoltà né maggiore interesse del caso visto nel piano, e non sarà per questo
esposta.
1.3 Superficie: definizioni e primi esempi
Una superficie topologica è un oggetto matematico che corrisponde all’idea intuitiva,
a tutti familiare, di superficie fatta di plastica, di carta, di metallo o di altri materiali.
Esempi classici, e come si vedrà, praticamente esaustivi, sono quelli delle superfici dei
poliedri che ognuno ha certamente incontrato in qualche contesto.
Definizione 1.9. Una superficie è uno spazio topologico connesso e di Hausdorff tale
che ogni suo punto ha un intorno aperto omeomorfo ad un aperto di R2 .
I risultati topologici e le operazioni di taglia e incolla presentate nella prima parte di
questo capitolo permettono agevolmente di costruire esempi significativi di superfici
topologiche a partire da poligoni piani chiusi, nel modo qui di seguito esemplificato.
6
Classificazione superfici compatte
◮ Esempio I–1. Si consideri il quadrato Q = [0, 1] × [0, 1] del piano
cartesiano, dotato della topologia indotta da R2 . Si consideri la relazione
♯ tra punti di Q così definita:
p = q oppure
p♯q ⇐⇒
∃y ∈ [0, 1] : p = (0, y) e q = (1, y) oppure
∃x ∈ [0, 1] : p = (x, 0) e q = (x, 1).
(1.2)
Sia ∼ la relazione di equivalenza ottenuta da ♯ imponendo le proprietà
riflessiva, simmetrica e transitiva (vedi esempio I–4 dell’appendice A).
La relazione di equivalenza ∼ è illustrata nella figura 1.4 ; tramite di essa
coppie di lati opposti del quadrato Q vengono tra loro identificati.
◭
a
b
b
a
Figura 1.4: quadrato con lati identificati omeomorfo a un toro
Sia Q/∼ lo spazio quoziente dotato della topologia quoziente e sia π la proiezione sul
quoziente π : Q → Q/∼ . Poiché Q è compatto e connesso, anche Q/∼ è compatto e
connesso. Vogliamo ora mostrare che Q/∼ è uno spazio di Hausdorff; grazie al teorema
1.3 ciò equivale a mostrare che l’insieme F = {(p, q) ∈ Q×Q : π(p) = π(q)} è chiuso
in Q × Q. A tal uopo si considerino i seguenti insiemi:
C1
C2
C3
C4
C5
C6
= {((x, y), (x, y)) ∈ Q × Q : (x, y) ∈ Q}
= {((0, y), (1, y)) ∈ Q × Q : y ∈ [0, 1]}
= {((1, y), (0, y)) ∈ Q × Q : y ∈ [0, 1]}
= {((x, 0), (x, 1)) ∈ Q × Q : x ∈ [0, 1]}
= {((x, 1), (x, 0)) ∈ Q × Q : x ∈ [0, 1]}
= {((0, 0), (1, 1)), ((1, 1), (0, 0)), ((0, 1), (1, 0)), ((1, 0), (0, 1))}
L’insieme C1 è chiuso perché Q è di Hausdorff; gli insiemi C2 , C3 , C4 e C5 sono
chiusi perché sottoinsiemi di uno spazio di Hausdorff ed immagini del compatto [0, 1]
di R attraverso applicazioni continue; C6 è chiuso poiché insieme finito di punti in uno
spazio di Hausdorff. Poiché F = C1 ∪ C2 ∪ C3 ∪ C4 ∪ C5 ∪ C6 , si conclude che F
7
Classificazione superfici compatte
è chiuso. Pertanto Q/∼ risulta uno spazio compatto, connesso e di Hausdorff. Ora,
se p ∈ Q è un punto della parte interna di Q, la restrizione della proiezione π ad un
qualunque dischetto aperto D = D(p, ε) = {q ∈ Q : d(p, q) < ε} di centro p e raggio
ε scelto in modo che D non intersechi il bordo di Q risulta un omeomorfismo; dunque
π(D) è un intorno aperto di π(p) omeomorfo ad un aperto di R2 . Se p è un punto di un
lato del quadrato Q che non è un vertice, l’operazione di taglia e incolla descritta nella
figura 1.5 (che risulta un omeomorfismo grazie al lemma 1.6) riconduce al caso in cui
in cui p è un punto interno al poligono.
a2
a1
c
b
b
b
c
a2
c
p
p
a1
a1
a2
a2
a1
Figura 1.5: uso del “taglia e incolla” per ricondurre al caso di punto interno al toro il
caso di punto sui lati (ma non vertice)
Se infine p è un vertice di Q, l’operazione di taglia e incolla descritta nella figura 1.6
(sempre omeomorfismo grazie al lemma 1.6) riconduce di nuovo al caso in cui p è un
punto interno al poligono.
Dunque ogni punto di Q/∼ ha un intorno aperto omeomorfo ad un aperto di R2 ,
ed in conclusione esso risulta una superficie, che si chiama toro o superficie torica, e si
indica con T.
Per giustificare il nome dato a questa superficie si svolga il seguente:
Esercizio 1.10. Si consideri l’applicazione
f : Q = [0, 1] × [0, 1] → R3
f (x, y) = ((a + r cos(2πx)) cos(2πy), (a + r cos(2πx)) sin(2πy), r sin(2πx))
dove 0 < r < a sono assegnati. Si dimostri che f induce un’applicazione fe : Q/∼ →
R3 tale che fe ◦ π = f e che fe è un omeomorfismo sull’immagine f (Q).
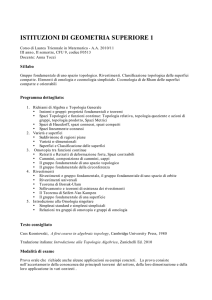
La superficie Q/∼ risulta dunque omeomorfa alla superficie di R3 illustrata in figura
1.7, cioè alla superficie di una “ciambella”, classicamente chiamata toro.
8
Classificazione superfici compatte
a2
a1
b2
b2
c2
d1
b1
a1
c1
b1
a2
p
c1
b1
p a1
a2
d2
c1
d1
d2
c2
c2
b2
d2
d1
Figura 1.6: uso del “taglia e incolla” per ricondurre al caso di punto interno al toro il
caso di punto su un vertice
Figura 1.7: superficie torica in R3
9
Classificazione superfici compatte
Sempre a partire dal quadrato Q = [0, 1] × [0, 1], variando il modo di identificare tra
loro i lati a due a due, si ottengono altre superfici interessanti, qui di seguito descritte.
Il lettore può provare per esercizio che, analogamente a quanto accade nell’esempio del
toro, si tratta effettivamente di superfici.
◮ Esempio I–2. La superficie S ottenuta quozientando Q come in
figura 1.8 risulta omeomorfa alla sfera S 2 = {(x, y, z) ∈ R3 : x2 + y 2 +
z 2 = 1} di R3 . Si verifichi per esercizio che S è omeomorfa alla superficie
ottenuta dal disco ∆ = {(x, y) ∈ R2 : x2 + y 2 ≤ 1} di R2 identificando i
punti del bordo ∂∆ come in figura 1.9, secondo la relazione di equivalenza
s definita da (x, y)s(u, v) ⇐⇒ y = v. Si dimostri poi che l’applicazione
h : ∆ → R3
h(x, y) =
p
1 − y 2 cos π p
x
1 − y2
!
,
p
x
1 − y 2 sin π p
1 − y2
!
induce un’applicazione e
h : ∆/s → S 2 che è un omeomorfismo.
,y
◭
b
a
b
a
Figura 1.8: quadrato con lati identificati omeomorfo ad una sfera
◮ Esempio I–3. La superficie ottenuta quozientando Q come in figura
1.10 si dice bottiglia di Klein e si indica con K. Si provi per esercizio
che la bottiglia di Klein è omeomorfa all’immagine g(Q) del quadrato Q
attraverso l’applicazione
g : Q = [0, 1] × [0, 1] → R4
(a + r cos(2πy)) cos(2πx)
(a + r cos(2πy)) sin(2πx)
g(x, y) =
r sin(2πy) cos(2πx/2)
r sin(2πy) sin(2πx/2)
10
◭
!
Classificazione superfici compatte
a
a
Figura 1.9: situazione cui si riconduce l’analisi delle identificazioni dei lati in Figura
1.8
b
a
a
b
Figura 1.10: quadrato con lati identificati omeomorfo ad una bottiglia di Klein
11
Classificazione superfici compatte
◮ Esempio I–4. Identificando i lati di Q come in figura 1.11 si ottiene
la superficie piano proiettivo, indicata anche P.
◭
b
a
a
b
Figura 1.11: quadrato con lati identificati omeomorfo a un piano proiettivo
Sia dato il disco chiuso ∆ = {(x, y) ∈ R2 : x2 + y 2 ≤ 1} dotato della topologia
indotta da R2 . Si consideri in ∆ la relazione di equivalenza R che identifica tra loro i
punti antipodali di ∂∆, come indicato in figura 1.12. Si provi per esercizio che ∆/R è
una superficie omeomorfa al piano proiettivo.
c
c
Figura 1.12: situazione cui si riconduce l’analisi delle identificazioni dei lati in Figura
1.11
Sia ora S 2 = {(x, y, z) ∈ R3 : x2 + y 2 + z 2 = 1} la sfera unitaria dello spazio R3 ,
dotata della topologia indotta da R3 . Si consideri la relazione di equivalenza, denotata
a, che identifica tra loro i punti antipodali di S 2 . Si mostri che S 2 /a è omeomorfa al
piano proiettivo.
1.4 Sviluppo piano e somma connessa di superfici
Per illustrare la tecnica dello sviluppo piano delle superfici compatte, che porterà alla
loro classificazione a meno di omeomorfismi, si comincia con un esempio. Si consideri
12
Classificazione superfici compatte
p
c
c
a(p)
Figura 1.13: visualizzazione della mappa antipodale
la superficie del tetraedro della figura 1.14 e si operino “tagli” lungo gli spigoli indicati
con a, b e c. Si passi cioè dalla superficie del tetraedro al sottoinsieme S dello spazio
formato dalle quattro facce del tetraedro poste come appaiono in figura 1.15 e si quozienti S mediante la relazione di equivalenza ∼ che identifica tra loro i lati delle facce
come indicato in figura.
Figura 1.14: tetraedro
b
c
c
a
b
a
Figura 1.15: tetraedro con tagli lungo gli spigoli e loro identificazione
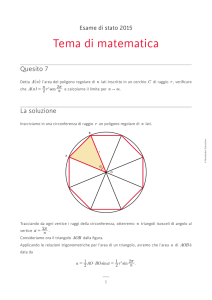
In conseguenza del lemma 1.6 lo spazio quoziente S/∼ risulta omeomorfo alla superficie del tetraedro. Sempre mediante un omeomorfismo (si “apra” e si “stenda” S sul
piano) si trasformi il quozienteS/∼ in un esagono regolare con i lati identificati tra loro
a coppie (vedi figure 1.16 e 1.17) a costituire quello che si dice uno sviluppo piano del
tetraedro. In conclusione l’esagono regolare chiuso, quozientato rispetto alla relazione
di equivalenza di identificazione dei lati a coppie come in figura 1.17, risulta omeomorfo alla superficie del tetraedro di partenza (che è, si noti, omeomorfa alla superficie
della sfera S 2 ).
13
Classificazione superfici compatte
c
b
b
c
a
a
Figura 1.16: sviluppo piano della Figura 1.15
b
c
b
c
a
a
Figura 1.17: altro sviluppo piano della Figura 1.15
Risulta chiaro dall’esempio che la possibilità di trovare uno sviluppo piano per ogni
superficie compatta darebbe un potente strumento per lo studio di questa classe di superfici. Si noti che nel paragrafo precedente sono stati forniti sviluppi piani (ottenuti
quozientando un quadrato chiuso) della sfera S 2 , del toro T, del piano proiettivo P e
della Bottiglia di Klein K.
Si proverà qui di seguito che difatti ogni superficie compatta ha uno sviluppo piano.
La dimostrazione di questo risultato si basa su un fondamentale teorema dimostrato da
Radò nel 1925, (vedi [4]). Cominciamo col definire cosa si intenda per triangolo di una
superficie compatta.
Definizione 1.11. Un triangolo di una superficie compatta S è una terna (T, T ′ , φ) costituita da un sottoinsieme chiuso T di S, da un triangolo chiuso T ′ del piano euclideo
e da un omeomorfismo φ di T ′ su T . Quando si dirà che un sottoinsieme chiuso T
di S è un triangolo si farà sempre implicito riferimento ad una terna (T, T ′ , φ) come
sopra definita, in cui T appare al primo posto. Le immagini attraverso φ dei lati di
T ′ si diranno lati del triangolo T e le immagini dei vertici di T ′ si diranno vertici del
triangolo T .
La superficie del tetraedro, usata nell’esempio all’inizio del paragrafo, è costituita
esclusivamente da triangoli che si saldano tutti con precisione lungo i bordi, ed è chiaro che questa proprietà del tetraedro ha suggerito come ottenerne uno sviluppo piano.
Volendo tentare di ripetere nel caso generale ciò che si è fatto per il tetraedro, occorre
la seguente:
14
Classificazione superfici compatte
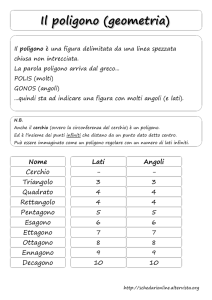
Definizione 1.12. Un insieme finito di triangoli {T1 , . . . , Tn } di una superficie compatta S si dice una triangolazione di S se:
S
a) ni=1 Ti = S;
b) per j, k ∈ {1, . . . , n}, j 6= k, l’intersezione Tj ∩ Tk è vuota, oppure è costituita da
un solo vertice, oppure è costituita da un intero, unico lato. Una superficie S si dice
triangolabile se ammette una triangolazione.
Per le superfici compatte triangolabili è possibile costruire uno sviluppo piano nello
stesso senso (e con la stessa idea) del caso del tetraedro. Più precisamente si dimostra
il:
Teorema 1.13. Ogni superficie compatta triangolabile è omeomorfa allo spazio ottenuto quozientando un poligono piano regolare, chiuso, avente un numero pari di lati,
rispetto ad una relazione di equivalenza che identifica opportunamente tra loro i lati del poligono a coppie. Un tale spazio quoziente si dice uno sviluppo piano della
superficie data.
Dimostrazione. Per n ∈ N sia τ = {T1 , . . . , Tn } una triangolazione di una superficie
compatta assegnata S. Siano {T1′ , . . . , Tn′ } e {φ1 , . . . , φn }, rispettivamente, i triangoli
del piano e gli omeomorfismi associati alla triangolazione tali che φi (Ti′ ) = Ti per
i = 1, . . . , n. Si può supporre, a meno di traslazioni opportune, che i triangoli del
piano {T1′ , . . . , Tn′ } siano tra loro a due a due disgiunti.
ϕ
T3
l1
T2
l1′
T ′1
T2′
T3′
T4′
T5′
T6′
T1
T6
T4
T5
Figura 1.18: prima fase della dimostrazione del teorema 1.13
Si consideri ora T1′ , sia l1′ uno dei suoi lati e sia l1 = φ1 (l1′ ) il corrispondente lato di T1 .
Il lato l1 è comune ad un altro triangolo della triangolazione τ della superficie S: infatti
se così non fosse i suoi punti non estremi non potrebbero avere intorni aperti omeomorfi
ad aperti di R2 . Sia dunque, a meno di una permutazione dei triangoli, T2 ∈ τ il
triangolo tale che T1 ∩ T2 = l1 e sia ϕ = (φ−1
2 ◦ φ1 )|l1′ il naturale omeomorfismo tra il
−1
′
′
′
lato l1 di T1 ed il lato φ2 (l1 ) di T2 . Si consideri a questo punto lo spazio topologico
T1′ ∪ T2′ e lo si quozienti rispetto alla relazione di equivalenza di identificazione di due
15
Classificazione superfici compatte
dei lati indotta dall’omeomorfismo ϕ ottenendo lo spazio quoziente M . Grazie alla
proposizione 1.8 lo spazio M è omeomorfo ad un quadrilatero P ′ chiuso del piano.
L’applicazione continua ψ : T1′ ∪ T2′ → T1 ∪ T2 definita come
φ1
su T1′
ψ=
φ2
su T2′
passa al quoziente M e definisce in modo naturale un’applicazione continua del quadrilatero P ′ del piano sul quadrilatero T1 ∪ T2 della superficie S. L’applicazione ψ è un
omeomorfismo della parte interna di P ′ sulla parte interna del quadrilatero T1 ∪ T2 e
trasforma omeomorficamente lati di P ′ in lati del quadrilatero T1 ∪ T2 della superficie.
Parlando in modo intuitivo, si sono “incollati tra loro i due triangoli T1′ e T2′ , riducendo
di uno il numero di “pezzi che compongono la superficie.
P’
T3
l1
T2
T ′1
T2′
l1′
T3′
T1
T6
T4
T5
T4′
T5′
T6′
Figura 1.19: seconda fase della dimostrazione del teorema 1.13
A questo punto si ripete il procedimento sopra esposto prendendo al posto di T1′ il
quadrilatero P ′ e considerando i restanti triangoli {T3′ , . . . , Tn′ } della triangolazione.
Dopo n − 1 passi si ottengono un poligono chiuso R′ del piano ed una applicazione
Ψ : R′ → S continua e surgettiva che ristretta alla parte interna di R′ è un omeomorfismo sull’immagine, e tale che la sua restrizione ad un qualunque lato di R′ è un
omeomorfismo su un lato della triangolazione τ della superficie S. È chiaro che, essendo S una superficie, l’immagine attraverso Ψ di un qualunque lato di R′ è immagine di
esattamente due lati distinti di R′ . Pertanto R′ ha un numero pari di lati. Per concludere la dimostrazione basta osservare che l’applicazione continua Ψ : R′ → S è chiusa
(poiché R′ è compatta e S è di Hausdorff) e dunque, grazie al Lemma 1.2, la topologia
della superficie S è la topologia quoziente indotta da R′ attraverso Ψ. In conclusione
la superficie S risulta omeomorfa al poligono chiuso R′ quozientato identificando tra
loro i lati a coppie, nessuno escluso, nel modo indotto da Ψ.
QED
Come si è già detto prima, nel 1925 T. Radò, ([4]), dimostrò il seguente risultato:
Teorema 1.14. Ogni superficie topologica compatta è triangolabile.
16
Classificazione superfici compatte
T2
T3
T1
c
c
T4′
T6′
b
T3′
T1′
T2′
T6
T4
a
T5
T5′
b
a
Figura 1.20: sviluppo piano ottenuto nel teorema 1.13
Grazie al risultato di Radò, il teorema 1.13 può essere enunciato in tutta la sua generalità:
Corollario 1.15. Ogni superficie compatta è omeomorfa allo spazio ottenuto quozientando un poligono piano regolare, chiuso, avente un numero pari di lati, rispetto ad
una relazione di equivalenza che identifica opportunamente tra loro i lati del poligono
a coppie. Un tale spazio quoziente si dice uno sviluppo piano della superficie data.
È a questo punto naturale chiedersi se è vero che identificando tra loro a coppie i lati di
un qualunque poligono chiuso, regolare, piano avente un numero pari di lati, si ottiene
lo sviluppo piano di una qualche superficie. La risposta è affermativa come si enuncia
nel seguente:
Teorema 1.16. Lo spazio topologico ottenuto quozientando un poligono chiuso, regolare, piano avente un numero pari di lati (o una “lunula”), rispetto ad una relazione
di equivalenza che identifichi tra loro i lati del poligono a coppie, è una superficie
compatta.
Dimostrazione. Si denoti con P il poligono chiuso del piano avente un numero pari
di lati, e sia ∼ la relazione di equivalenza assegnata di identificazione dei lati di P a
coppie. Occorre innanzi tutto mostrare che il quoziente P/∼ è uno spazio di Hausdorff.
Grazie al teorema 1.3 è sufficiente provare che l’insieme F = {(p1 , p2 ) ∈ P × P :
p1 ∼ p2 } è un chiuso per la topologia prodotto di P × P . Per far questo si può
scomporre F in un’unione di chiusi, analogamente al caso del toro nell’esempio I–1.
Poiché P/∼ risulta (connesso) compatto e di Hausdorff, resta da provare che esso è
localmente omeomorfo a R2 . Sia π : P → P/∼ la proiezione sul quoziente, e sia p un
punto della parte interna di P . Esiste dunque un dischetto aperto ∆(p, ε), di centro p e
raggio ε > 0, tutto contenuto nella parte interna di P , sul quale la restrizione di π è un
omeomorfismo con l’immagine π(∆(p, ε)). Pertanto π(∆(p, ε)) è un intorno aperto di
π(p) omeomorfo all’aperto ∆(p, ε) di R2 .
Se ora p è un punto appartenente ad un lato di P senza essere un vertice, si operi su
P/∼ con un’operazione di taglia e incolla come indicato in figura 1.21, tenendo conto
17
Classificazione superfici compatte
k
c
p
k
h
k
p
h
h
Figura 1.21: come rendere “interno” un punto di un lato
del fatto che il lato cui p appartiene viene identificato tramite ∼ con uno ed un solo
altro lato di P .
Grazie al lemma 1.6 l’operazione di taglia e incolla risulta un omeomorfismo di P/∼
ed inoltre p è, nella nuova situazione, un punto interno del poligono da quozientare.
Dunque, come abbiamo già provato, π(p) ha un intorno aperto omeomorfo ad un aperto
di R2 .
Resta per ultimo il caso in cui il punto p è un vertice del poligono P . Se p è lo stesso
estremo di due lati che sono tra loro identificati come in figura 1.22
a p a
aa
a
p
Figura 1.22: come rendere “interno” un vertice in un caso particolare
si opera con l’omeomorfismo di P/∼ descritto sempre nella figura 1.22 tornando nuovamente alla situazione in cui p è un punto interno al poligono da quozientare e si
conclude al solito modo. Se invece non ci troviamo nelle situazioni precedentemente
considerate, siano p1 , . . . , pk tutti i vertici di P equivalenti a p. Si può supporre senza
perdere di generalità che ci siano almeno due classi di equivalenza di vertici: se così
non fosse, tramite l’operazione inversa di quella descritta nella figura 1.22 si introduce
un nuovo vertice non equivalente a quelli già presenti nel poligono. Si può a questo
punto supporre che il vertice q che precede p non sia equivalente a p. Come rappresentato nella figura 1.23, sia b il lato che collega q a p e sia a il lato che termina in p e non
contiene q. È importante a questo punto osservare che, per le ipotesi poste, i lati a e b
non sono identificati tra loro: se lo fossero, in un caso p e q risulterebbero equivalen18
Classificazione superfici compatte
ti, nell’altro p sarebbe un vertice con le caratteristiche di quello descritto nella figura
1.22. Dunque il lato a viene identificato con un altro lato di P diverso da b. Si operi
un omeomorfismo di taglia e incolla come in figura 1.23 diminuendo di uno il numero
a
c
a
c
p
p1
q
b
a
c
q1
p1
q
Figura 1.23: come ricondursi al caso della figura 1.22
di vertici equivalenti a p. Si ripeta il ragionamento fin qui svolto finché la classe di
equivalenza di p non contenga un solo vertice. A questo punto l’unica possibilità è che
questo vertice sia lo stesso estremo di due lati che sono tra loro identificati, e dunque si
procede come descritto nella figura 1.22 passando nuovamente alla situzione in cui p è
interno al poligono da quozientare e si conclude.
QED
Il corollario 1.15 ed il teorema 1.16, insieme, costituiscono uno strumento molto utile
per lo studio delle superfici compatte: il problema è infatti ricondotto a studiare tutti i
possibili quozienti ottenibili da un poligono chiuso, regolare, piano con un numero pari
di lati, mediante identificazione dei lati tra loro a coppie. Ad ogni superficie sarà sostituito un suo sviluppo piano. Nello sviluppo piano ad ogni lato del poligono regolare si
assegna una lettera identificativa ed un verso di percorrenza, generalmente indicato da
una freccia sul lato, come nell’esempio I–1 e seguenti. La convenzione ovvia è che lati
identificati da una stessa lettera sono da identificare tra loro tenendo conto del verso di
percorrenza indicato.
Una ulteriore “algebrizzazione” dello studio delle superfici compatte si può ottenere
come segue: se P è un poligono chiuso, regolare, piano con un numero pari di lati tra
loro identificati a coppie, si scelga uno dei vertici del poligono P e si percorrano i lati
in senso antiorario a partire da quel vertice, scrivendo di seguito, a formare una parola,
le lettere corrispondenti ai lati incontrati. Ad ogni lettera sarà assegnato l’esponente
−1 se il verso di percorrenza del lato corrispondente è quello orario; esponente +1 che si omette di indicare - altrimenti (vedi figura 1.24).
In questo modo ad ogni superficie compatta si fa corrispondere, attraverso un suo sviluppo piano, una parola formata da un numero finito di lettere, ognuna ripetuta esattamente due volte, che può figurare, ogni volta, senza alcun esponente o con esponente
-1. Viceversa ogni parola formata da un numero finito di lettere, ognuna ripetuta esattamente due volte, che figura senza alcun esponente o con esponente -1, rappresenta
19
Classificazione superfici compatte
d
a
b
c
a
b
c
d
Figura 1.24: superficie di parola ad−1 cbc−1 da−1 b
nel modo ovvio una superficie. Rappresenta infatti la superficie il cui sviluppo piano
è un poligono chiuso, regolare piano con un numero (pari) di lati uguale al numero di
lettere che formano la parola, identificati tra loro a coppie nel modo indicato dalla parola stessa. Riprendendo l’esempio I–1 e seguenti, si può costruire la seguente tabella
nella quale si associano al toro, alla sfera, alla bottiglia di Klein ed al piano proiettivo
le seguenti parole:
T
S2
K
P
aba−1 b−1
abb−1 a−1
aba−1 b
abab
Nell’esempio I–2 e nell’esempio I–4 si suggeriscono una realizzazione della sfera e una
del piano proiettivo ottenute quozientando un disco chiuso di raggio unitario rispetto ad
una opportuna relazione di equivalenza che identifica tra di loro le due semicirconferenze in cui si divide il bordo del disco chiuso. Con lo stesso metodo appena usato per
i poligoni, volendo considerare il disco chiuso come un “poligono” avente come “lati”
due semicirconferenze opposte nelle quali si divide il suo bordo, si possono associare
a sfera e piano proiettivo, rispettivamente, le parole:
S2
P
cc−1
cc
Si è studiato in dettaglio, nei paragrafi precedenti, come quozientando spazi topologici
di Hausdorff, compatti, rispetto a relazioni di equivalenza chiuse, si ottengano quozienti
di Hausdorff; si è anche studiata l’operazione di taglia ed incolla. Si è ora in grado di
usare speditamente queste operazioni con le superfici compatte. Per procedere nel loro
studio ci si servirà anche della seguente:
Definizione 1.17. Una superficie a bordo è uno spazio topologico connesso e di Hausdorff tale che ogni suo punto ha un intorno omeomorfo ad un aperto di R2 oppure allo
20
Classificazione superfici compatte
spazio ∆+ = {(x, y) ∈ R2 : x2 + y 2 < 1, y ≥ 0}. Per una superficie a bordo,
l’insieme dei punti che hanno un intorno omeomorfo ad un aperto di R2 si dice interno
della superficie; l’insieme di quei punti p che hanno un intorno Vp per il quale esiste
un omeomorfismo hp di Vp su ∆+ tale che hp (p) = 0 si dice bordo della superficie.
Esempi di superfici a bordo sono il disco chiuso ∆ = {(x, y) ∈ R2 : x2 + y 2 ≤ 1}
del piano ed il cilindro C = {(x, y, z) ∈ R3 : x2 + y 2 = 1, −1 ≤ z ≤ 1} dello
spazio R3 . Quozientando il quadrato Q = [0, 1] × [0, 1] per la relazione di equivalenza
chiusa che identifica due dei lati opposti come descritto in figura 1.25 si ottiene una
superficie a bordo chiamata nastro di Möbius e che sarà denotata con M. Il bordo del
disco ∆ è ovviamente una circonferenza ed il bordo del cilindro C è costituito da due
circonferenze disgiunte.
a
a
a
Figura 1.25: il nastro di Möbius
Esercizio 1.18. Si provi esplicitamente che il nastro di Möbius è una superficie a bordo
e che il bordo del nastro di Möbius è omeomorfo ad una circonferenza.
Si possono mostrare a questo punto alcuni divertenti risultati di “chirurgia topologica”,
come quelli che seguono:
Lemma 1.19. Siano dati due nastri di Möbius disgiunti M1 ed M2 . Sia ∼ la relazione
di equivalenza che identifica tra loro la circonferenza bordo di M1 e la circonferenza
bordo di M2 . Lo spazio quoziente (M1 ∪ M2 )/∼ è omeomorfo alla bottiglia di Klein
K.
Dimostrazione. Siano M1 ed M2 i due nastri di Möbius, rappresentati come in figura
1.26.
Si identifichino tra loro il bordo di M1 ed il bordo di M2 e si divida M1 in due parti
operando un taglio lungo il diametro come in figura 1.27; si incolli poi ognuna delle
due parti ottenute ad M2 come in figura 1.28. La superficie così ottenuta è la bottiglia
di Klein K.
QED
21
Classificazione superfici compatte
a
c
h
c
b
b
M2
a
M1
Figura 1.26: due nastri di Möbius
α
c
a
h
h
c
a
β
β
b
b
α
Figura 1.27: taglia e incolla dei due nastri di Möbius
h
c
β
b
α
a
b
c
a
h
Figura 1.28: bottiglia di Klein ottenuta dai due nastri di Möbius
22
Classificazione superfici compatte
Il lemma 1.19 dice che “incollando” lungo il bordo due nastri di Möbius si ottiene la
bottiglia di Klein.
Si consideri ora una qualunque superficie compatta S, sia p un punto di S e sia Up un
intorno aperto di p in S omeomorfo tramite hp ad un disco aperto ∆(0, 2ε) di centro
0 e raggio 2ε > 0 nel piano. Sia inoltre l’omeomorfismo hp tale che hp (p) = 0, e si
ponga Dp = (hp )−1 (∆(0, ε)).
Definizione 1.20. L’insieme Dp si dice un dischetto aperto attorno a p in S. Lo spazio
topologico S\Dp si dice ottenuto da S tagliando un dischetto aperto (attorno a p).
Proposizione 1.21. L’insieme S\Dp , ottenuto da una superficie S tagliando un dischetto aperto attorno ad un punto p, è una superficie a bordo. Il bordo di S\Dp è il
bordo ∂Dp di Dp , omeomorfo alla circonferenza ∂∆(0, ε).
Dimostrazione. La dimostrazione è del tutto ovvia. Per ognuno dei punti q di ∂Dp l’
omeomorfismo hp opportunamente ristretto fornisce un omeomorfismo di un intorno
di q in S\Dp su un insieme di R2 omeomorfo a {(x, y) ∈ R2 : x2 + y 2 < 1, y ≥ 0}.
QED
La seguente proposizione mette in relazione il nastro di Möbius con il piano proiettivo:
Proposizione 1.22. Se p è un punto del piano proiettivo P, la superficie a bordo P\Dp
ottenuta tagliando un dischetto aperto attorno a p in P è un nastro di Moebius.
Dimostrazione. Sia P ottenuto a partire dal disco unitario chiuso del piano, identificando tra loro due opposte semicirconferenze del bordo, secondo la parola cc (vedi figura
1.29). Si passi a P\Dp tagliando il dischetto aperto tratteggiato nella figura 1.30.
c
c
Figura 1.29: piano proiettivo P
I passi successivi della dimostrazione sono rappresentati nella sequenza di omeomorfismi che è illustrata nella figura 1.31. Attraverso di essi si trasforma P\Dp nel nastro di
Möbius M, concludendo la dimostrazione.
QED
23
Classificazione superfici compatte
c
c
Figura 1.30: piano proiettivo privato P del dischetto Dp
h
c
c
h
h
c
Figura 1.31: trasformazione di P\Dp nel nastro di Möbius
24
Classificazione superfici compatte
Gli esempi di superficie che si sono fin qui forniti possono essere “combinati” tra di
loro per formare nuove superfici, mediante l’operazione di somma connessa che si va
ora a definire:
Definizione 1.23. Siano S1 ed S2 due superfici compatte disgiunte, e siano p ∈ S1 e
q ∈ S2 . Siano S1 \Dp ed S2 \Dq le due superfici a bordo ottenute tagliando, rispettivamente, un dischetto attorno a p in S1 ed un dischetto attorno a q in S2 . Sia ∼ la
relazione di equivalenza che identifica tra loro, tramite un omeomorfismo, il bordo di
S1 \Dp e quello di S2 \Dq (ognuno omeomorfo ad una circonferenza). Lo spazio topologico quoziente [(S1 \Dp )˚
∪(S2 \Dq )]/∼ si dice somma connessa delle superfici S1 ed
S2 , e si denota con S1 #S2 .
(a)
(b)
(c)
Figura 1.32: esempio di somma connessa
Dimostrare che una somma connessa di due superfici S1 ed S2 , illustrata con un esempio nella figura 1.32, è a sua volta una superficie, è un facile esercizio che si lascia al
lettore. È interessante, e sarà utile in quel che segue, sviluppare a questo punto alcuni
esempi fondamentali.
◮ Esempio I–5. Si considerino un toro T1 , ottenuto come quoziente
di un quadrato chiuso del piano mediante l’identificazione dei lati indot−1
ta dalla parola a1 b1 a−1
1 b1 , ed un toro T2 , ottenuto come quoziente di un
quadrato chiuso del piano (disgiunto dal precedente) mediante l’identifica−1
zione dei lati indotta dalla parola a2 b2 a−1
2 b2 . Si taglino, rispettivamente,
un dischetto D1 dal toro T1 ed un dischetto D2 dal toro T2 e si realizzi la
somma connessa T1 #T2 . La realizzazione della somma connessa dei due
tori e la successione di omeomorfismi definiti nella figura 1.33 (vedi lemma 1.6 e lemma 1.7) provano che la superficie T1 #T2 è omeomorfa alla
superficie ottenuta da un ottagono regolare chiuso del piano identificando
−1
−1 −1
i lati secondo la parola a1 b1 a−1
◭
1 b1 a2 b2 a2 b2 .
25
Classificazione superfici compatte
b1
pi_1
c1
c2
a1
b1
a1
b1
pi_2
a2
b2
b2
a2
c
c
b1
a1
a2
b2
a1
a1
a2
b2
b2
b1
a2
a1
b2
b1
a2
Figura 1.33: somma connessa di due tori
26
Classificazione superfici compatte
c2
c1
p1
d2
d1
c2
c1
c1
d
c1
p2
c2
c1
c2
c2
c1
c2
d
Figura 1.34: somma connessa di due piani proiettivi
◮ Esempio I–6. Si considerino un piano proiettivo P1 definito dalla
parola c1 c1 ed un piano proiettivo P2 , disgiunto dal precedente, definito
dalla parola c2 c2 . La realizzazione della somma connessa dei due piani
proiettivi e la successione di omeomorfismi definiti nella figura 1.34 provano che la superficie P1 #P2 è omeomorfa alla superficie ottenuta da un
quadrato chiuso del piano identificando i lati secondo la parola c1 c1 c2 c2 .
◭
Si noti a questo punto che per definizione di somma connessa di superfici, e grazie alla
proposizione 1.22 ed al lemma 1.19 si ottiene direttamente la:
Proposizione 1.24. La somma connessa di due piani proiettivi è una superficie omeomorfa alla bottiglia di Klein.
Questo risultato non è in contraddizione con quello dell’esempio I–6. Per convincersene basta svolgere il seguente:
Esercizio 1.25. Si operi con omeomorfismi di taglia e incolla trasformando la superficie definita dalla parola c1 c1 c2 c2 (somma connessa di due piani proiettivi) nella
superficie definita dalla parola abab−1 (bottiglia di Klein).
◮ Esempio I–7. Si considerino ora un piano proiettivo P definito dalla parola cc ed un toro T, disgiunto dal piano proiettivo, definito dalla
parola aba−1 b−1 . La realizzazione della somma connessa e la successione di omeomorfismi definiti nella figura 1.35 provano che la superficie
P#T è omeomorfa alla superficie ottenuta da un esagono chiuso del piano
identificando i lati secondo la parola ccaba−1 b−1 .
◭
27
Classificazione superfici compatte
c
(1)
a
b
d′
d
b
a
c
b
b
a
c
d
(2)
c
(3)
a
c
b
d
a
b
c
a
Figura 1.35: somma connessa di un piano proiettivo e un toro
Studiamo più in dettaglio la somma connessa “mista” tra tori e piani proiettivi. Ciò che
succede è difatti piuttosto curioso come appare dalla seguente:
Proposizione 1.26. La somma connessa di un toro e di un piano proiettivo è omeomorfa alla somma connessa di tre piani proiettivi. Equivalentemente, la superficie rappresentata dalla parola ccaba−1 b−1 è omeomorfa alla superficie rappresentata dalla
parola ccddf f .
Dimostrazione. Si realizzi la somma connessa di un toro e di un piano proiettivo come
suggerito in figura 1.35 e si usino poi gli omeomorfismi di taglia e incolla descritti nella
figura 1.36. La superficie che si ottiene è omeomorfa alla somma connessa della bottiglia di Klein e di un piano proiettivo. Ricordando a questo punto che, come stabilito
nella proposizione 1.24, la bottiglia di Klein è omeomorfa alla somma connessa di due
piani proiettivi, si conclude la dimostrazione.
QED
Dimostreremo ora che alla somma connessa di superfici corrisponde la giustapposizione di parole, il che consente di provare che la somma connessa è definita univocamente,
a meno di omeomorfismo. Iniziamo con il seguente:
Lemma 1.27. Sia S una superficie compatta e sia Dp un dischetto aperto in S. Se S
ha sviluppo piano rappresentato dalla parola x1 . . . x2n allora S \ Dp è omeomorfa ad
un (2n + 1)-agono i cui lati sono identificati secondo la parola x1 . . . x2n a.
Dimostrazione. Per ipotesi S òmeomorfa ad un 2n-agono di parola x1 . . . x2n , che
possiamo indicare con P . Scegliendo un dischetto D in P tangente al vertice comune
a x2n e x1 , chiaramente P \ D è omeomorfo a ad un (2n + 1)-agono i cui lati sono
identificati secondo la parola x1 . . . x2n a (dove il lato a non è identificato con nessun
28
Classificazione superfici compatte
(1)
b
a
(2)
b
f
f
b
c
c
b
a
c
(3)
a
a
a
b
f
f
f
h
a
(5)
f
(4)
b
f
h
a
b
f
h
h
b
f
hhbf bf − 1
h
b
Figura 1.36: trasformazione di T#P in P#K
29
Classificazione superfici compatte
e per qualaltro lato e corrisponde al bordo di D). Ora, S \ Dp è omeomorfa a P \ D
e Con operazioni di taglia e incolla simili a quelle viste nella
che dischetto aperto D.
e è omeomorfa a P \ D e si
dimostrazione del teorema 1.16, si dimostra che P \ D
conclude.
QED
Teorema 1.28. Siano S1 e S2 due superfici compatte. Se S1 ha sviluppo piano rappresentato dalla parola x1 . . . x2n e S2 ha sviluppo piano rappresentato dalla parola y1 . . . y2m , allora ogni superficie ottenuta come somma connessa di S1 ed S2 ha
sviluppo piano rappresentato dalla parola x1 . . . x2n y1 . . . y2m .
Dimostrazione. Scelti comunque due dischetti aperti D1 , D2 in S1 , S2 , per il lemma
1.27 S1 \ D1 è omeomorfo a un (2n + 1)-agono i cui lati sono identificati secondo la
parola x1 . . . x2n a e S2 \D2 è omeomorfo a un (2m+1)-agono i cui lati sono identificati
secondo la parola y1 . . . y2m b. Indichiamoli, rispettivamente, con P1 e P2 . Abbiamo
dunque un omeomorfismo (S1 \ D1 )˚
∪(S2 \ D2 ) → P1˚
∪P2 , il quale passa al quoziente
definendo un omemorfismo tra S1 #S2 e (P1˚
∪P2 )/ ∼, dove ∼ è l’identificazione tra
b e a−1 (esercizio, utilizzando il lemma 1.4). Si conclude notando che (P1˚
∪P2 )/ ∼ è
omeomorfo al (2n + 2m)-agono di parola x1 . . . x2n y1 . . . y2m .
QED
Corollario 1.29. La somma connessa # definisce un’operazione binaria associativa
sull’insieme delle classi di omeomorfismo di superfici compatte.
Dimostrazione. Siano date due superfici compatte S1 , S2 . Grazie al teorema 1.28, tutte
le superfici ottenute come somma connessa S1 #S2 sono tra loro omeomorfe. Supponiamo ora, per i ∈ {1, 2}, di sostituire Si con una superficie Sei ad essa omeomorfa.
Poiché Sei ha lo stesso sviluppo piano di Si , dal teorema 1.28 si conclude facilmente che
ogni superficie ottenuta come somma connessa Se1 #Se2 è omeomorfa ad ogni somma
S1 #S2 . La somma # associa quindi alla classe di omeomorfismo di S1 e a quella di
S2 una ed una sola classe di omeomorfismo di superfici compatte.
L’associatività è anch’essa una conseguenza del teorema 1.28, giacché la giustapposizione di parole è chiaramente associativa.
QED
Il seguente esercizio dimostra che esiste un elemento neutro:
Esercizio 1.30. Sia S una qualunque superficie compatta. Se S denota come al solito
la sfera, si provi che S#S è omeomorfa ad S.
I risultati visti finora dimostrano immediatamente la seguente:
−1
Osservazione 1.31. Per i ∈ {1, . . . , m}, sia Ti il toro definito dalla parola ai bi a−1
i bi .
Per j ∈ {1, . . . , n}, sia Pj lo spazio proiettivo definito dalla parola cj cj . Supponiamo
inoltre che le superfici suddette siano a due a due disgiunte. Allora
1. T1 # · · · #Tm è omeomorfa alla superficie ottenuta identificando i lati di un 4m−1
−1 −1
agono regolare chiuso del piano secondo la parola a1 b1 a−1
1 b1 · · · am bm am bm .
30
Classificazione superfici compatte
2. P1 # · · · #Pn è omeomorfa alla superficie ottenuta identificando i lati di un 2nagono regolare chiuso del piano secondo la parola c1 c1 · · · cn cn .
3. P1 # · · · #Pn #T1 · · · #Tm è omeomorfa alla superficie ottenuta identificando i
lati di un (2n + 4m)-agono regolare chiuso del piano secondo la parola
−1
−1 −1
c1 c1 · · · cn cn a1 b1 a−1
1 b1 · · · am bm am bm .
La somma “mista” di tori e piani proiettivi può essere ulteriormente caratterizzata come
segue.
Teorema 1.32. Siano n ed m due numeri naturali. La somma connessa di n piani
proiettivi e di m tori è una superficie omeomorfa alla somma connessa di n + 2m piani
proiettivi. Equivalentemente, la superficie rappresentata dalla parola
−1
−1 −1
c1 c1 · · · cn cn a1 b1 a−1
1 b1 · · · am bm am bm
è omeomorfa alla superficie rappresentata dalla parola c1 c1 · · · cn+2m cn+2m .
Esercizio 1.33. Si dimostri il teorema 1.32, facendo uso della proposizione 1.26.
1.5 La classificazione delle superfici compatte
A conclusione di questo capitolo, raccogliendo i frutti della teoria e dei risultati esposti, si enuncia e si dimostra un teorema che classifica le superfici compatte a meno di
omeomorfismi. La dimostrazione di questo teorema, che si basa sull’uso dell’operazione di taglia e incolla, ha una struttura manifestatamente algoritmica che ne suggerisce la
implementazione computazionale. Nella sua tesi di laurea, [2], M.L. Guglielmi presenta, tra altro, un programma scritto in “Mathematica” per riconoscere automaticamente
la classe di omeomorfismo di una qualunque superficie compatta data mediante una
“parola” che la identifica. Il programma implementa l’operazione di taglia ed incolla,
secondo i dettami della dimostrazione del teorema di classificazione che sarà qui di
seguito presentata.
Grazie al corollario 1.15 ed al teorema 1.16, studiare le superfici compatte equivale a
studiare tutti i possibili spazi ottenuti come quoziente di un poligono regolare, piano,
chiuso, avente un numero pari di lati, rispetto ad una qualunque relazione di equivalenza che identifica tra loro a coppie i lati del poligono. Come abbiamo stabilito, la
relazione di equivalenza di identificazione dei lati del poligono - e dunque la superficie
- è individuata da una parola avente un numero finito di lettere, ognuna delle quali
appare nella parola esattamente due volte, ognuna delle volte con esponente +1 (che si
omette di scrivere) o con esponente −1. Per comodità espositiva diremo che due lati
del poligono formano una coppia se ai due lati è assegnata una stessa lettera, cioè se
sono identificati tramite la relazione di equivalenza. Una coppia di lati si dirà coppia
del primo tipo se la lettera ad essi assegnata appare nella parola una volta con esponente
+1 ed una con esponente −1; si dirà coppia del secondo tipo altrimenti. Una coppia
di lati si dirà una coppia di lati adiacenti se la coppia è formata da lati del poligono
31
Classificazione superfici compatte
aventi un vertice in comune. Ad esempio, nella sfera dd−1 e nel toro aba−1 b−1 tutte le
coppie di lati sono del primo tipo, mentre nel piano proiettivo cc appare una coppia del
secondo tipo. Le coppie di lati del toro non sono coppie di lati adiacenti.
Teorema 1.34. Ogni superficie compatta è omeomorfa ad una sfera, ad una somma
connessa di tori o ad una somma connessa di piani proiettivi.
Dimostrazione. Partiamo dunque da un poligono piano chiuso P i cui lati sono tutti
identificati tra loro a coppie nel modo descritto da una parola W . La dimostrazione
sarà esposta in forma di algoritmo, in passi successivi:
Passo uno. Si verifica il numero delle lettere della parola.
• Si osserva che se la parola W ha una sola lettera ripetuta due volte, la dimostrazione si conclude subito. Infatti una parola con una sola lettera ripetuta individua
una coppia di lati adiacenti del primo tipo aa−1 che corrisponde ad una sfera,
oppure una coppia di lati adiacenti del secondo tipo aa, che corrisponde ad un
piano proiettivo.
• Se invece il poligono P ha almeno quattro lati (cioè se W ha almeno due lettere
diverse ripetute) si va al passo due.
Passo due. Si eliminano le coppie di lati adiacenti del primo tipo.
• Se nel poligono P non ci sono coppie di lati adiacenti del primo tipo si va al
passo tre.
• Altrimenti, scelta una coppia di lati adiacenti del primo tipo (individuata ad
esempio dalla lettera a), si applica l’omeomorfismo descritto nella figura 1.37
per eliminare la coppia, passando dalla parola W del tipo Aaa−1 B alla nuova
parola AB nella quale figura una lettera di meno (qui le lettere maiuscole A e
B indicano sequenze di lettere). Corrispondentemente si è ridotto di due unità il
numero di lati del poligono P . Si torna poi al passo uno.
a
a
a
(a)
(b)
a
a
(c)
Figura 1.37: come eliminare una coppia adiacente del primo tipo
Passo tre. Si trasforma il poligono P in un nuovo poligono in cui tutti i vertici sono tra
loro identificati.
32
Classificazione superfici compatte
• Se tutti i vertici sono tra loro equivalenti tramite le identificazioni dei lati, si va
al passo quattro direttamente.
• Supponiamo dunque che ci siano almeno due classi di equivalenza di vertici distinte. Si trovano allora due vertici consecutivi nel poligono, C e D, che non sono
nella stessa classe di equivalenza. Si noti che, poiché a questo punto dell’algoritmo dimostrativo non ci sono coppie del primo tipo di lati adiacenti e poiché C
e D non sono equivalenti, i lati a e b di figura 1.38 non possono essere fra loro
identificati. Si opera con un omeomorfismo di taglia ed incolla come in figura
1.38, passando ad un nuovo poligono che ha un vertice in meno nella classe di
equivalenza cui appartiene D ed un vertice in più nella classe di equivalenza cui
appartiene C. Si torna ora al passo due.
D
b
a
C
c
C
c
a
D
D
c
b
C
Figura 1.38: come eliminare un rappresentante della classe di D
Passo quattro. Si rendono adiacenti le eventuali coppie del secondo tipo.
• Se nel poligono non ci sono coppie di lati del secondo tipo o se tutte le coppie di
lati del secondo tipo sono adiacenti, si va direttamente al passo cinque.
• Se nel poligono compare una coppia di lati del secondo tipo non adiacenti, si
opera con un omeomorfismo come in figura 1.39, passando ad un nuovo poligono
in cui c’è una coppia di lati del secondo tipo non adiacenti in meno, ed una coppia
di lati del secondo tipo adiacenti in più. Si ripete poi il passo quattro.
Passo cinque. Si rendono consecutive le eventuali coppie del primo tipo “intrecciate”.
• Se nel poligono non ci sono coppie di lati del primo tipo, significa che in esso
figurano solo coppie di lati adiacenti del secondo tipo, e dunque il quoziente
del poligono risulta omeomorfo ad una somma connessa di piani proiettivi, e la
dimostrazione è conclusa.
Supponiamo che, arrivati al passo cinque dell’algoritmo dimostrativo, nel poligono P ci sia una coppia di lati del primo tipo, individuata per esempio dalla
33
Classificazione superfici compatte
a
b
b
a
a
b
Figura 1.39: come rendere adiacente una coppia del secondo tipo
lettera a; supponiamo cioè che la parola W associata al poligono sia del tipo
aN a−1 S, dove le lettere maiuscole indicano come d’uso un’intera sequenza di
lati. Si dimostra allora che esiste necessariamente un’altra coppia di lati del
primo tipo, individuata per esempio dalla lettera b, intrecciata alla prima, tale cioè
che la parola associata al poligono sia in realtà della forma aV bZa−1 U b−1 T .
Infatti se, per assurdo, i lati etichettati con a non fossero separati da una coppia
del primo tipo con essi intrecciata, allora il poligono avrebbe la struttura esposta
nella figura 1.40. Poiché le coppie di lati del secondo tipo del poligono sono tutte
adiacenti, ogni lato in N sarebbe identificato con un lato in N , ed ogni lato in
S con un lato in S. Pertanto non ci sarebbero lati in N identificati con lati in S
e dunque i vertici estremi di a starebbero in due classi di equivalenza distinte.
Questo in contraddizione con il fatto che, essendo stato superato il punto tre
dell’algoritmo dimostrativo, i vertici del poligono sono tutti tra loro equivalenti.
Dunque la parola W associata al poligono P è del tipo aV bZa−1 U b−1 T .
N
a
a
S
Figura 1.40: coppia del primo tipo non adiacente
• Se dunque, arrivati al passo cinque dell’algoritmo, nel poligono P ci sono due
coppie del primo tipo intrecciate, si opera con gli omeomorfismi descritti nella
figura 1.41: questi omeomorfismi non mutano l’adiacenza di nessuna delle coppie del secondo tipo del poligono, ma trasformano il poligono stesso in modo
34
Classificazione superfici compatte
b
a
c
a
c
b
a
a
c
b
(2)
(1)
c
d
c
a
a
a
d
d
c
c
(3)
(4)
Figura 1.41: come rendere consecutive due coppie del primo tipo “intrecciate”
35
Classificazione superfici compatte
che i quattro lati appartenenti alle due coppie del primo tipo intrecciate vengano
a trovarsi in sequenza consecutiva. La nuova parola W associata al poligono sarà
del tipo cdc−1 d−1 K. Si ripeta il passo cinque finché tutte le coppie del primo
tipo che appaiono nel poligono non vengono a trovarsi raggruppate a due a due,
tra loro intrecciate, in sequenze di quattro lati consecutivi.
Riferendosi a quanto già visto, nel caso in questione la superficie risulta essere,
per opportuni n, m ∈ N, n ≥ 0, m > 0, omeomorfa ad una somma connessa di
n piani proiettivi ed m tori. Grazie al teorema 1.32 si conclude che se n = 0 la
superficie è omeomorfa alla somma connessa di m tori; se invece n > 0 essa è
omeomorfa alla somma connessa di n + 2m piani proiettivi.
QED
Come conseguenza del teorema appena dimostrato si trova che le superfici compatte
sono esaurite (a meno di omeomorfismi) dalla combinazione per somma connessa dei
modelli naturali elencati inizialmente, e cioè sfera, toro, piano proiettivo: un risultato,
questo, non facilmente immaginabile quando ci si pone all’inizio il problema della
classificazione.
Appare naturale chiedersi se anche nel caso di superfici compatte con bordo sia possibile una classificazione così soddisfacente. La risposta è affermativa, e qui illustreremo
brevemente come si opera in questo caso. Si osserva innanzi tutto che:
Lemma 1.35. In una superficie a bordo, compatta, il bordo è costituito da un numero
finito di componenti connesse, ognuna delle quali è omeomorfa ad una circonferenza
del piano.
Dimostrazione. Il bordo di una superficie risulta, per definizione, chiuso e localmente
omeomorfo ad R (vedi definizione 1.17). Essendo la superficie compatta, esistono solo
un numero finito di componenti connesse compatte del bordo, e ognuna di esse risulta
omeomorfa ad una circonferenza del piano (esercizio).
QED
Sia data una superficie compatta a bordo S, il cui bordo abbia k componenti connesse
B1 , · · · , Bk , ognuna omeomorfa ad una circonferenza del piano (vedi lemma 1.35).
Si considerino k dischi chiusi ∆1 , · · · , ∆k del piano, disgiunti tra loro e da S. Per
ogni i = 1, . . . , k sia φi : Bi → ∂∆i un omeomorfismo. Sullo spazio compatto
S ′ = S ∪ ∆1 ∪ · · · ∪ ∆k si consideri la relazione di equivalenza ∼ che identifica s ∈ Bi
con φi (s) ∈ ∂∆i , per i = 1, . . . , k.
Lemma 1.36. Lo spazio quoziente Se = S ′ /∼ risulta una superficie compatta senza
bordo.
Dimostrazione. Esercizio.
36
Classificazione superfici compatte
Volendo descrivere la situazione per immagini, si è dimostrato (o si deve dimostrare
per esercizio) che “incollando” il bordo di un dischetto ad ogni componenete connessa
del bordo di una superficie compatta a bordo si ottiene una superficie compatta senza
bordo. L’operazione inversa è quella di tagliare da una superficie compatta un numero
finito di dischetti aperti.
Definizione 1.37. Sia S una superficie compatta, sia k ∈ N e siano {p1 , . . . , pk }
punti distinti di S. Siano {Dp1 , . . . , Dpk } dischetti aperti attorno, rispettivamente, a
{p1 , . . . , pk } di S, tra loro disgiunti (vedi definizione 1.20). L’insieme S\{Dp1 ∪ · · · ∪
Dpk } si dice ottenuto da S tagliando k dischetti aperti.
In modo del tutto analogo a quanto stabilito nella proposizione 1.21, si prova che l’insieme ottenuto da una superficie compatta S tagliando k dischetti aperti è una superficie
compatta con bordo, il cui bordo è omeomorfo all’unione di k circonferenze disgiunte.
Vale il seguente risultato:
Teorema 1.38. Siano S1 ed S2 due superfici compatte con bordo. Supponiamo che i
bordi delle due superfici abbiano lo stesso numero di componenti connesse (ognuna
omeomorfa ad una circonferenza). Allora S1 ed S2 sono omeomorfe se e solo se le
superfici compatte senza bordo Se1 and Se2 , ottenute da S1 ed S2 incollando un dischetto
lungo ogni componente del bordo, sono tra loro omeomorfe.
Di quest’ultimo teorema non forniamo la dimostrazione, che può essere trovata, per
esempio in [3]. Evidenziamo invece una ovvia, interessante conseguenza dovuta al
teorema 1.34:
Corollario 1.39. Ogni superficie compatta a bordo è omeomorfa alla superficie ottenuta tagliando un numero finito di dischetti aperti da una sfera o da una somma connessa
di tori o da una somma connessa di piani proiettivi.
In [3], per dimostrare il teorema 1.38 si prova che le superfici con bordo si possono tutte
costruire, a meno di omeomorfismo, quozientando un poligono piano, regolare chiuso
per una relazione di equivalenza che identifica tra loro a coppie alcuni dei lati. I lati
che non vengono identificati con nessun altro costituiscono il bordo della superficie.
Le relazioni di identificazione dei lati di un poligono che danno origine a superfici a
bordo sono rappresentate, secondo lo schema già usato, da parole con un numero finito
qualunque di lettere, ognuna delle quali appare al massimo due volte e ognuna delle
volte con esponente +1 o −1. Il programma di cui si è già parlato, [2], implementa
anche la classificazione delle superfici compatte con bordo.
Esercizi 1.40. Di ciascuna delle seguenti parole si dica se definisce una superficie
compatta (o una superficie compatta a bordo). Si classifichino le superfici e le superfici
a bordo eventualmente ottenute con l’apposito algoritmo:
1. abcdd−1 a−1 b−1 c−1
37
Classificazione superfici compatte
2. abcacb−1 a
3. abcda−1 b−1 c−1 d−1
4. abca−1 b−1 c−1 d−1
5. dc−1 a−1 bb−1 ac
6. abcdea−1 b−1 c−1 d−1 e−1
7. dac−1 bca−1 b−1
8. bca−1 cbda−1 d
1.6 Esercizi di riepilogo
Esercizio 1.41. Si consideri una corona circolare chiusa C nel piano R2 , dotata della
topologia indotta. Si identifichino tra loro la circonferenza interna e quella esterna,
nei due possibile modi a seconda del verso di percorrenza.
1. Si dica se gli spazi quoziente ottenuti sono superfici o no.
2. In caso affermativo se ne determinino gli sviluppi piani, e si riconoscano le
superfici secondo il teorema di classificazione.
Esercizio 1.42. Classificare tutte le possibili superfici che si possono ottenere identificando i lati di un esagono ognuno con il suo opposto.
Esercizio 1.43. Si consideri la superficie P definita dalla parola s−1 bshcb−1 h−1 e sia
T un triangolo equilatero chiuso del piano.
1. Determinare P secondo il teorema di classificazione delle superfici compatte.
2. Identificare tra loro esattamente due lati di T nei due possibili modi, e, dette T1
e T2 , le superfici ottenute, classificare T1 e T2 a meno di omeomorfismi.
3. Per i = 1, 2, sia dato un omemorfismo ψ : ∂Ti → ∂P e si consideri lo spazio
Ri = (P ∪ Ti )/ ∼, con x ∼ y se e solo se y = x oppure y = ψ(x). Dire se Ri
sia una superficie compatta e se abbia bordo o meno.
4. Identificare Ri a meno di omeomorfismo nei due possibili casi.
Esercizio 1.44. Sia T la superficie torica, e sia T0 la superficie con bordo ottenuta
tagliando da T un dischetto aperto. Si indichi con M il nastro di Möbius, e si consideri
◦
lo spazio X ottenuto da T0 ∪ M identificando ∂ T0 con ∂ M.
1. Si provi che X è una superficie compatta senza bordo.
2. Si determini un rappresentante della classe di omeomorfismo di X.
38
Classificazione superfici compatte
3. Si risponda alle domande precedenti nel caso in cui T sia rimpiazzata da una
qualunque superficie compatta senza bordo.
Esercizio 1.45.
1. Consideriamo le superfici compatte definite dalle seguenti parole:
W1 = a1 a2 a3 a4 a1 −1 a2 −1 a3 −1 a4 ,
W2 = a1 a2 a3 a4 a1 −1 a2 −1 a3 −1 a4 −1 .
Chiamiamo S1 , S2 le superfici rappresentate, rispettivamente, da W1 , W2 . Si
trovi il rappresentante, nel senso del teorema di classificazione delle superfici compatte, delle superfici Si , per i = 1, 2. Per farlo si percorrano i passi
dell’algoritmo utilizzato per dimostrare il teorema di classificazione.
2. Generalizzando, dire quali superfici rappresentano (al variare di n) i poligoni
ottenuti identificando i lati secondo le parole
Un = a1 a2 a3 · · · an a1 −1 a2 −1 a3 −1 · · · an ,
Vn = a1 a2 a3 · · · an a1 −1 a2 −1 a3 −1 · · · an −1 .
39
Capitolo 2
Omotopia di applicazioni e di spazi
2.1 Spazi connessi per archi e localmente connessi per archi
Uno spazio topologico X si dice connesso per archi se, dati due punti qualsiasi x0 e x1
in X, esiste un’applicazione continua f dell’intervallo unità I = {t ∈ R : 0 ≤ t ≤ 1}
in X, tale che f (0) = x0 , f (1) = x1 . L’applicazione continua f viene chiamata un
cammino (o arco) da x0 a x1 .
◮ Esempio II–1. Qualsiasi intervallo di R è connesso per archi. Lo
stesso vale per ogni convesso di Rn .
◭
Siano x0 , x1 , x2 tre punti di di uno spazio topologico X e supponiamo che esistano
due cammini f : I → X da x0 a x1 e g : I → X da x1 a x2 . Allora l’applicazione
h : I → X definita da:
per 0 ≤ t ≤ 12
f (2t)
h(t) =
g(2t − 1) per 21 ≤ t ≤ 1
è un cammino da x0 a x1 . Vale dunque vale il
Lemma 2.1. Sia X uno spazio topologico e siano x0 , x1 e x2 tre punti di X. Se
esistono un cammino da x0 a x1 ed un cammino da x1 a x2 , allora esiste un cammino
da x0 a x2 .
Corollario 2.2. Se in uno spazio topologico X esiste un punto y0 tale che ogni y ∈ X
è congiunto a y0 da un cammino, allora lo spazio X è connesso per archi.
Sia f un cammino di X. Poichéf (I) è connesso, esso è contenuto nella componente
connessa di f (0) in X. Ne segue la
Proposizione 2.3. Uno spazio connesso per archi è connesso.
40
Omotopia di applicazioni e di spazi
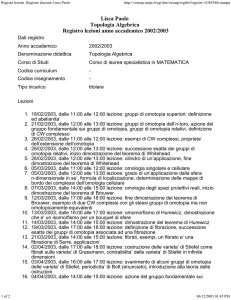
Il seguente esempio mostra che non vale l’inverso della proposizione precedente.
◮ Esempio II–2. Siano
P = {(x, y) ∈ R2 : 0 ≤ x < 1,
Yν = {(x, y) ∈ R2 : x =
1
,
ν
0 < y < 1}
0<y ≤1−
1
}
ν
per ν = 2, 3, ..., e sia
X = P \ (∪ν Yν )
Lo spazio X è connesso (esercizio). Sia x0 = (0, a) con 0 < a < 1 e
x1 = (b, c) con 12 < b < 1, 0 < c < 1, e siaf : I → X un cammino
da x0 a x1 in X. Posto f (t) = (f1 (t), f2 (t)), la funzione continua f2
ha sul compatto I un massimo K < 1. D’altra parte per tν ∈ I tale
che f1 (tν ) = ν1 , deve essere f2 (tν ) ≥ 1 − ν1 per ν = 1, 2, ... Questa
contraddizione prova che X non è connesso per archi.
◭
......... ................
1
n
1 1
5 4
1
3
1
2
Figura 2.1: spazio connesso ma non connesso per archi
Lo spazio X si dice localmente connesso per archi se ogni punto ha un sistema fondamentale di intorni ciascuno dei quali è connesso per archi (per la topologia indotta).
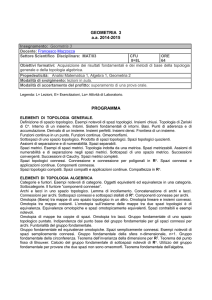
◮ Esempio II–3. Siano, per n ∈ N,
n>1
X0 = {(x, y) ∈ R2 : 0 ≤ x ≤ 1,
y = 0}
41
Omotopia di applicazioni e di spazi
Y0 = {(x, y) ∈ R2 : x = 0,
0 ≤ y ≤ 1}
1
,
n
0 ≤ y ≤ 1}
Yn = {(x, y) ∈ R2 : x =
e sia
∞
[
X=
Yn
n=0
!
∪ X0
Lo spazio X (con la topologia indotta da R2 ) è connesso per archi, ma
non localmente connesso nei punti (0, y) con 0 < y ≤ 1.
◭
Y0
Y5
Y3
Y2
.... .....
X0
1
n
1 1
5 4
1
3
1
2
Figura 2.2: spazio connesso per archi ma non localmente connesso per archi
Proposizione 2.4. Uno spazio topologico è localmente connesso per archi se e soltanto
se esso ha una base di aperti che sono connessi per archi (per la topologia indotta).
Dimostrazione. È chiaro anzitutto che, se esiste nello spazio topologico X una base di
aperti connessi per archi, X è localmente connesso per archi.
Viceversa, sia X localmente connesso per archi. Dato x0 ∈ X e dato un intorno aperto
U di x0 , sia V = {x ∈ U : esiste un cammino da x0 a x contenuto in U }. Si ha
x0 ∈ V ⊂ U . Per ogni y ∈ V , esiste un intorno A di y connesso per archi tale che
y ∈ A ⊂ U . Dunque A ⊂ V (vedi lemma 2.1), e per conseguenza V è aperto.
Dati y e z in V esistono due cammini f : I → X, g : I → X da x0 a y e da x0 a z tali
che f (I) ⊂ U , g(I) ⊂ U , e per conseguenza f (I) ⊂ V , g(I) ⊂ V . Dal corollario
2.2 segue che V è connesso per archi.
QED
Sia x ∈ X. La componente connessa per archi di x è l’insieme dei punti di X che sono
congiunti a x da cammini in X. La componente connessa per archi di un punto x ∈ X
42
Omotopia di applicazioni e di spazi
X0
A
y
V
U
Figura 2.3: intorni costruiti nella dimostrazione della proposizione 2.4
è ovviamente contenuta nella componente connessa di x, poiché gli archi sono sottoinsiemi connessi. Le componenti connesse di uno spazio topologico X sono sottoinsiemi
chiusi, mentre per le componenti connesse per archi si ha:
Lemma 2.5. Se X è localmente connesso per archi, le componenti connesse per archi
sono aperte e chiuse.
Dimostrazione. Il fatto che la componente connessa per archi Cx del punto x ∈ X
è aperta è conseguenza diretta della proposizione 2.4 e del lemma 2.1. Per dimostrare
che il complementare di Cx in X è chiuso, si consideri un qualunque y ∈
/ Cx e sia B
un intorno connesso per archi di y. Sia ora b un qualunque punto di B. Poiché esiste
un arco tra y e b, se esistesse un arco tra b e x esisterebbe anche un arco tra y e x (vedi
lemma 2.1) e dunque y apparterrebbe a Cx . Di conseguenza b ∈
/ Cx . Per l’arbitrarietà
di b ∈ B si conclude.
QED
Come conseguenza immediata ma interessante si ottiene
Corollario 2.6. Se X è connesso e localmente connesso per archi, X è connesso per
archi.
Esercizi 2.7.
1. Si provi che qualsiasi aperto connesso di Rn è connesso per archi.
2. Sia R l’insieme dei numeri reali e sia τ la famiglia dei sottoinsiemi di R che si
ottengono dagli aperti della retta R togliendo una famiglia di punti al più numerabile.
Si dimostri che:
a) la famiglia dei sottoinsiemi τ è una topologia su R;
b) detta Γ la retta R con la topologia τ , si provi che Γ è connesso ma non connesso per
archi.
3. Sia χ l’insieme delle applicazioni continue I → I con la topologia della convergenza uniforme. Si provi che lo spazio χ è connesso per archi.
43
Omotopia di applicazioni e di spazi
2.2 Omotopia
Siano X e Y due spazi topologici. Si studierà qui di seguito l’insieme delle applicazioni
continue da X in Y , con lo scopo di raggruppare in classi le applicazioni che si possono
“deformare” con continuità l’una nell’altra, in un senso reso preciso dalla seguente
Definizione 2.8. Due applicazioni continue
f0 : X → Y
f1 : X → Y
si dicono omotope (in simboli f0 ∼ f1 ) se esiste un’ applicazione continua
F : X ×I → Y
tale che
F (x, 0) = f0 (x)
F (x, 1) = f1 (x)
per ogni x ∈ X. L’applicazione F si chiama un’ omotopia di f0 in f1 .
f1
X
F
I
X
Y
f0
Figura 2.4: funzioni considerate nella definizione 2.8
Teorema 2.9. L’omotopia è una relazione di equivalenza.
Dimostrazione. L’applicazione
(x, t) 7→ f0 (x)
definisce un’omotopia di f0 in f0 . Dunque f0 ∼ f0 .
Data l’omotopia F di f0 in f1 , l’applicazione
X × I ∋ (x, t) 7→ F (x, 1 − t)
44
Omotopia di applicazioni e di spazi
definisce un’omotopia di f1 in f0 . Dunque, se f0 ∼ f1 , è f1 ∼ f0 .
Sia f0 ∼ f1 e f1 ∼ f2 , e siano F e G, rispettivamente, un’omotopia di f0 in f1 e
un’omotopia di f1 in f2 . Poiché F (x, 1) = f1 (x) = G(x, 0), posto
per x ∈ X 0 ≤ t ≤ 21
F (x, 2t)
H(x, t) =
G(x, 2t − 1) per x ∈ X 12 ≤ t ≤ 1
è definita un’applicazione
H :X ×I →Y
Applicando il lemma 1.4 ai chiusi X × [0,
Inoltre, poiché
1
2]
e X × [ 12 , 1] si prova che H è continua.
H(x, 0) = F (x, 0) = f0 (x)
H(x, 1) = G(x, 1) = f2 (x)
si conclude che f0 ∼ f2 .
QED
Una nozione più restrittiva di quella dell’omotopia tra applicazioni ora presentata è
quella dell’omotopia relativa. L’omotopia relativa interesserà particolarmente nel seguito, nel caso dei cammini.
Definizione 2.10. Siano X e Y due spazi topologici. Dati X0 ⊂ X e Y0 ⊂ Y , se
f0 (X0 ) ⊂ Y0 , f1 (X0 ) ⊂ Y0 , e se esiste un’omotopia F di f0 in f1 tale che
F (X0 × I) ⊂ Y0
si dice che f0 e f1 sono omotope relativamente a X0 e Y0 e F si dice un’omotopia di
f0 in f1 relativa a X0 e Y0 .
Come ci si può aspettare, vale il seguente
Teorema 2.11. L’omotopia relativa è una relazione di equivalenza.
Dimostrazione. Esercizio.
Il teorema 2.9 consente di ripartire le applicazioni continue di X in Y in classi di equivalenza, che saranno chiamate classi di omotopia. Il problema centrale della teoria dell’omotopia consiste nell’esprimere le classi di omotopia mediante invarianti topologici
degli spazi X e Y .
Si esamineranno ora alcuni esempi, elementari e significativi, di omotopie tra applicazioni e si vedrà come, per certe scelte degli spazi topologici X e Y , la classificazione
omotopica delle applicazioni tra di essi si banalizzi e perda di interesse. Si ricorda anzitutto che un sottoinsieme S di Rn si dice stellato rispetto ad un punto s0 ∈ S se per
ogni s ∈ S il segmento [s, s0 ] = {ts + (1 − t)s0 : t ∈ [0, 1]} è contenuto interamente
in S.
45
Omotopia di applicazioni e di spazi
Proposizione 2.12. Sia f : X → S un’applicazione continua di uno spazio topologico
X in un sottoinsieme S ⊆ Rn stellato rispetto ad un suo punto s0 (e dotato della
topologia indotta). Allora f è omotopa all’applicazione costante cs0 : X → S definita
da cs0 (x) = s0 per ogni x ∈ X.
Dimostrazione. L’applicazione F : X × I → S definita da (x, t) 7→ tf (x) + (1 −
t)s0 è continua poiché composizione di applicazioni continue e, ovviamente, si ha che
F (x, 0) = s0 = cs0 (x) e F (x, 1) = f (x) per ogni x ∈ X.
QED
Come ovvia conseguenza della proposizione 2.12 si deduce che
Corollario 2.13. Siano dati un qualunque spazio topologico X ed un qualunque sottoinsieme stellato S di Rn . Tutte le applicazioni continue da X in S sono tra loro
omotope.
Si ricordi che Rn stesso, tutti i suoi sottospazi, tutti i suoi sottoinsiemi convessi ed in
particolare la palla unità Bn = {x ∈ Rn : |x| < 1} e la sua chiusura B n , sono
sottoinsiemi stellati di Rn .
Consideriamo ora il caso in cui il dominio delle applicazioni continue considerate sia
un sottoinsieme stellato di Rn .
Proposizione 2.14. Sia f : S → Y un’applicazione continua da un sottoinsieme S
di Rn stellato rispetto ad un suo punto s0 (e dotato della topologia indotta) a valori
in un qualunque spazio topologico Y . Allora f è omotopa all’applicazione costante
cf (s0 ) : S → Y definita da cf (s0 ) (s) = f (s0 ) per ogni s ∈ S.
Dimostrazione. L’applicazione F : S × I → Y definita come F (s, t) = f (ts + (1 −
t)s0 ) è un’omotopia tra cf (s0 ) e f .
QED
Dunque, anche nelle ipotesi della proposizione 2.14 lo studio delle classi di omotopia
delle applicazioni si banalizza:
Corollario 2.15. Siano dati un qualunque sottoinsieme stellato S di Rn ed un qualunque spazio topologico Y . Tutte le applicazioni continue da S in Y sono tra loro
omotope.
Si osservi che quanto appena dimostrato per sottoinsiemi stellati di Rn vale direttamente per sottoinsiemi stellati di un qualunque spazio vettoriale topologico su R (ossia
uno R-spazio vettoriale su cui è definita una topologia tale che la somma vettoriale e
il prodotto per uno scalare siano applicazioni continue). Nasce anche naturalmente, a
questo punto, l’esigenza di decidere quali applicazioni costanti siano tra loro omotope,
questione a cui risponde la seguente
Proposizione 2.16. Siano X e Y due spazi topologici. Se Y è connesso per archi,
allora tutte le applicazioni costanti di X in Y sono tra loro omotope.
46
Omotopia di applicazioni e di spazi
Dimostrazione. siano cu : x 7→ u e cv : x 7→ v due qualunque applicazioni costanti
da X in Y , e sia γ : I → Y un cammino da u a v. L’applicazione F : X × I → Y
definita da F (x, t) = γ(t) è un’omotopia tra cu e cv .
QED
Esercizio 2.17. Per n ∈ N, n > 0 sia S n = {x ∈ Rn+1 : |x| = 1} la sfera unitaria
dello spazio Rn+1 e sia p ∈ S n . Sia X uno spazio topologico e sia f : X → S n \{p}
un’applicazione continua. Si provi che f è omotopa ad una applicazione costante e
che tutte le applicazioni continue di X in S n \{p} sono tra loro omotope.
Si troveranno presto molti esempi di applicazioni continue non omotope ad un’applicazione costante. Si vuole anche chiarire, prima di procedere oltre, che l’omotopia e
l’omotopia relativa non sono due nozioni equivalenti. È vero che applicazioni tra loro
omotope relativamente a due sottospazi assegnati, rispettivamente, uno nel dominio e
uno nel codominio, sono in particolare omotope tra loro. Esistono però applicazioni
tra loro omotope, ma non omotope relativamente a due sottospazi assegnati, uno nel
dominio ed uno nel codominio. A tal proposito si veda il seguente
◮ Esempio II–4. Si considerino, per n ∈ N, n ≥ 1 i seguenti
sottoinsiemi di R2
X0 = {(0, s) : 0 ≤ s ≤ 1}
Xn = {s(0, 1) + (1 − s)(1/n, 0) : s ∈ [0, 1]}
e sia
X = X0 ∪
[
n≥1
Xn
dotato della topologia indotta da R2 . Si considerino le due applicazioni
continue id : X → X, l’applicazione identica, e c(0,0) : X → X, l’applicazione costante c(0,0) (x) = (0, 0) per ogni x ∈ X. Grazie al corollario
2.13 si ha che c(0,0) e id sono omotope. D’altra parte si ha che c(0,0) e
id non sono omotope relativamente a {(0, 0)} e {(0, 0)} (lo si provi per
esercizio).
◭
Si studierà ora, dal punto di vista dell’omotopia, la composizione di applicazioni continue. Si ricordi che la relazione di equivalenza di omotopia si indica con ∼.
Teorema 2.18. Siano X, Y e Z spazi topologici, siano f0 e f1 due applicazioni continue di X in Y e siano g0 e g1 due applicazioni continue di Y in Z. Se f0 ∼ f1 e
g0 ∼ g1 , risulta
g0 ◦ f0 ∼ g1 ◦ f1
Dimostrazione. Proviamo anzitutto che
g0 ◦ f0 ∼ g0 ◦ f1
47
Omotopia di applicazioni e di spazi
.....
Figura 2.5: omotopia X × I → X nell’esempio II–4
Se F è un’omotopia di f0 in f1 , l’applicazione
g0 ◦ F : X × I → Z
è un omotopia di g0 ◦ f0 in g0 ◦ f1 .
Proviamo ora che
g0 ◦ f1 ∼ g1 ◦ f1
Sia G un’omotopia di g0 in g1 , e sia f˜1 : X × I → Y × I l’applicazione continua
definita da
f˜1 (x, t) = (f1 (x), t)
L’applicazione K = G ◦ f˜1 : X × I → Z è continua. Essendo
K(x, 0) = G(f˜1 (x, 0)) = G(f1 (x), 0) = g0 (f1 (x))
K(x, 1) = G(f˜1 (x, 1)) = G(f1 (x), 1) = g1 (f1 (x))
per ogni x ∈ X, l’applicazione K è un’omotopia di g0 ◦ f1 in g1 ◦ f1 .
Poiché l’omotopia è una relazione di equivalenza si ottiene
g0 ◦ f0 ∼ g0 ◦ f1 ∼ g1 ◦ f1
QED
48
Omotopia di applicazioni e di spazi
Corollario 2.19. Siano X, Y , Z, W spazi topologici. Siano g : Y → Z, h :
W → X, f0 : X → Y , f1 : X → Y applicazioni continue. Se f0 ∼ f1 , risulta
g ◦ f0 ∼ g ◦ f1 e f0 ◦ h ∼ f1 ◦ h.
Esercizio 2.20. Si estenda il teorema 2.18 e il corollario 2.19 all’omotopia relativa.
Definizione 2.21. Siano X e Y due spazi topologici. Se esistono due applicazioni
continue f : X → Y e g : Y → X tali che g ◦ f : X → X e f ◦ g : Y → Y
siano ambedue omotope alle applicazioni identiche (in X e Y rispettivamente ) :
g ◦ f ∼ idX
f ◦ g ∼ idY
allora si dirà che X e Y hanno lo stesso tipo di omotopia e si scriverà X ∼ Y .
Ciascuna delle applicazioni continue f e g si chiamerà un’ equivalenza omotopica.
Analogamente a quanto accade per l’omotopia tra applicazioni si ha che:
Teorema 2.22. Il tipo di omotopia è una relazione di equivalenza.
Dimostrazione. Chiaramente
X∼X
e
X ∼ Y implica Y ∼ X
Sia ora Z un terzo spazio topologico e sia X ∼ Y , Y ∼ Z. Siano f : X → Y ,
g : Y → X, u : Y → Z, v : Z → Y applicazioni continue tali che g ◦ f ∼ idX ,
f ◦ g ∼ idY , v ◦ u ∼ idY , u ◦ v ∼ idZ . Per il corollario 2.19 v ◦ u ◦ f ∼ f , e
quindi g ◦ v ◦ u ◦ f ∼ g ◦ f ∼ idX , ossia ( g ◦ v ) ◦ ( u ◦ f ) ∼ idX .
Similmente, sempre per il corollario 2.19 u ◦ f ◦ g ∼ u e quindi u ◦ f ◦ g ◦ v ∼ idZ
ossia ( u ◦ f ) ◦ ( g ◦ v ) ∼ idZ .
In conclusione X ∼ Z.
QED
Si dice che lo spazio X è contrattile se l’applicazione identica idX : X → X è
omotopa ad un’applicazione costante di X in X.
Teorema 2.23. Uno spazio è contrattile se e solo se ha lo stesso tipo di omotopia di un
punto.
Dimostrazione. Se X è contrattile esiste un punto x0 ∈ X tale che idX ∼ cx0 ove
cx0 : X → X è tale che cx0 (x) = x0 per ogni x ∈ X. Sia g : {x0 } → X tale che
g(x0 ) = x0 . Dunque g ◦ f ∼ idX e f ◦ g ∼ id{x0 } , in conclusione X ∼ {x0 }.
Viceversa, se X ha il tipo di omotopia di un punto {p0 }, esistono due applicazioni
continue f : X → {p0 }, g : {p0 } → X tali che g ◦ f ∼ idX e f ◦ g ∼ id{p0 } .
Posto x0 = g(p0 ) è (g ◦ f )(x) = g(p0 ) = x0 per ogni x ∈ X.
QED
49
Omotopia di applicazioni e di spazi
Lemma 2.24. Uno spazio contrattile è connesso per archi.
Dimostrazione. Sia F un’omotopia dell’applicazione idX : X → X in un’applicazione c : X → X, che trasforma X in un punto x0 ∈ X. Per ogni x ∈ X
l’applicazione γx : I → X definita da
γx (t) = F (x, t)
è continua, e quindi è un cammino da
γx (0) = F (x, 0) = idX (x) = x
a
γx (1) = F (x, 1) = c(x) = x0 .
L’asserto segue dal corollario 2.2.
QED
Per le proposizioni 2.12 e 2.14, un qualunque sottoinsieme stellato di Rn (o di un
qualunque spazio vettoriale topologico su R) è contrattile. In particolare lo spazio Rn
stesso è contrattile. Il disco unità chiuso (o aperto) per una qualsiasi norma di Rn è
contrattile. Similmente, ogni spazio vettoriale topologico su R è contrattile e lo è il
disco unità chiuso (o aperto) per una qualsiasi norma continua in uno spazio vettoriale
topologico su R. Ogni insieme convesso è contrattile.
Sia Y un sottospazio di uno spazio topologico X. Se esiste un’applicazione continua
h : X → Y ⊆ X tale che h(y) = y per ogni y ∈ Y , si dice che Y è un retratto di
X, e l’applicazione h si chiama una retrazione di X su Y .
Ci si interesserà ora di eventuali retrazioni h di X su Y omotope all’applicazione
identica. Più precisamente:
Definizione 2.25. Un sottospazio topologico Y di uno spazio topologico X si dice un
retratto per deformazione di X se esiste un’applicazione continua
F :X ×I →X
tale che
F (x, 0) = x
F (x, 1) ∈ Y
F (y, t) = y
per ogni x ∈ X
per ogni x ∈ X
per ogni y ∈ Y
e
ogni
0≤t≤1
L’applicazione x 7→ F (x, 1) si dice in questo caso una retrazione per deformazione di
X su Y .
Se l’applicazione continua F : X × I → X è invece solo tale che
F (x, 0) = x
F (x, 1) ∈ Y
F (y, 1) = y
F (y, t) ∈ Y
50
per
per
per
per
ogni
ogni
ogni
ogni
x∈X
x∈X
y∈Y
y∈Y
e
ogni
0≤t≤1
Omotopia di applicazioni e di spazi
allora Y si dice un retratto per deformazione in senso debole di X e x 7→ F (x, 1) si
dice una retrazione per deformazione in senso debole di X su Y .
Se infine l’applicazione continua F : X × I → X è tale che
F (x, 0) = x
F (x, 1) ∈ Y
F (y, 1) = y
per ogni x ∈ X
per ogni x ∈ X
per ogni y ∈ Y
allora Y si dice un retratto per deformazione in senso iperdebole di X e x 7→ F (x, 1)
si dice una retrazione per deformazione in senso iperdebole di X su Y .
Siano Y e X come sopra, sia Y un retratto per deformazione in senso iperdebole di
X e sia h : X → Y una retrazione in senso iperdebole di X su Y . Sia i : Y → X
l’inclusione di Y in X; risulta ovviamente h ◦ i = idY e l’applicazione i ◦ h è omotopa
all’applicazione identica idX . Le applicazioni h ◦ i e i ◦ h sono dunque equivalenze
omotopiche fra Y e X, e di conseguenza vale il
Proposizione 2.26. Ogni spazio topologico X ha lo stesso tipo di omotopia di un
suo qualunque retratto (per deformazione, per deformazione in senso debole e) per
deformazione in senso iperdebole.
Si costruiranno e studieranno adesso alcuni spazi topologici che forniscono esempi
significativi ed interessanti e che saranno particolarmente utili nel seguito.
Definizione 2.27. Nel piano R2 , siano C1 e C−1 le due circonferenze di raggio unitario
e centri, rispettivamente, (1, 0) e (−1, 0). Il sottoinsieme di R2 definito da
O = C 1 ∪ C2
dotato della topologia indotta da R2 si dice figura otto.
◮ Esempio II–5. L’insieme O (figura otto) è un retratto per deformazione di R2 \ {(−1, 0), (1, 0)}. Per provarlo si consideri l’applicazione d
del semipiano Πd = {(x, y) ∈ R2 : x ≥ 0} privato del punto (1, 0), a
valori in C1 , così definita: a) per q ∈ Πd esterno a C1 , d(q) è quell’intersezione della retta contenente l’origine e q con la circonferenza C1 che è
più vicina a q; b) per q interno a C1 (e diverso da (1, 0)) d(q) è l’intersezione della semiretta uscente da (1, 0) e contenente q con C1 (vedi Figura
2.6). L’applicazione d risulta ovviamente continua.
Simmetrizzando ora la costruzione di d rispetto all’asse delle y, si ottiene
un’applicazione s del semipiano Πs = {(x, y) ∈ R2 : x ≤ 0} privato
del punto (−1, 0), a valori in C−1 , che assieme a d, grazie al lemma 1.4,
definisce una retrazione per deformazione di R2 \ {(−1, 0), (1, 0)} su O
(esercizio). Dunque R2 \ {(−1, 0), (1, 0)} ha lo stesso tipo di omotopia
di O. Poiché tutti gli insiemi ottenuti togliendo due punti distinti da R2
51
Omotopia di applicazioni e di spazi
sono tra loro omeomorfi, nel riferirsi a quanto illustrato in questo esempio si userà dire che lo spazio R2 privato di due punti ha lo stesso tipo di
omotopia della figura otto.
◭
p
r
d(p)
s(t)
t
s(r)
d(r)
q
s(δ)
δ
d(q)
Figura 2.6: retrazione di R2 \ {(−1, 0), (1, 0)} sulla figura otto
Si consideri, per n ∈ N, n > 1, il cammino ln : [− nπ , πn ] → R2 così definito:
ln (ϑ) =
x(ϑ) = cos(ϑ) cos( n2 ϑ)
y(ϑ) = sin(ϑ) cos( n2 ϑ)
tale che ln (− nπ ) = ln ( nπ ) = 0. La sua immagine Pn , detta petalo di ampiezza 2π
n (rappresentata nella figura 7 per il caso n = 3) è contenuta in uno degli angoli determinati
π
in coordinate polari (ρ, ϑ) dalle semirette ϑ = −π
n e ϑ = n.
Definizione 2.28. Per j, n ∈ N si indichi con Rnj la rotazione in R2 di un angolo
attorno all’origine e si consideri il sottoinsieme di R2 così definito
Fn =
n−1
[
2jπ
n
Rnj (Pn )
j=0
L’insieme Fn rappresentato nella figura 7, dotato della topologia indotta da R2 , si dice
corolla con n petali.
52
Omotopia di applicazioni e di spazi
◮ Esempio II–6. Si indichi con p il punto ( 21 , 0) interno al petalo Pn .
L’insieme
R2 \ {p, Rn1 (p), . . . , Rnn−1 (p)}
ottenuto da R2 togliendo un punto interno ad ogni petalo di Fn (togliendo
precisamente gli n punti ottenuti ruotando p degli angoli multipli interi
di 2π
n ) ha lo stesso tipo di omotopia di Fn . La dimostrazione di questo
fatto (esercizio) si ispira alla costruzione data nell’esempio II–5, nel caso
della figura otto, che tra l’altro risulta essere omeomorfa a F2 . Poiché tutti
gli insiemi ottenuti da R2 togliendo un qualunque sottoinsieme di n punti
distinti sono tra loro omeomorfi, per riferirsi a quanto mostrato in questo
esempio si userà dire che lo spazio R2 privato di n punti distinti ha lo
stesso tipo di omotopia di una corolla con n petali.
◭
p
P3
Figura 2.7: corolla con tre petali
Definizione 2.29. Per j ∈ N, j > 0, sia Cj la circonferenza di centro (j, 0) e raggio j
di R2 . L’insieme
n
[
Cj
Bn =
j=1
rappresentato in figura 8, dotato della topologia indotta da R2 si dice un bouquet di n
circonferenze.
◮ Esempio II–7. Siano dati i seguenti sottoinsiemi di Rn (o più in generale di uno spazio vettoriale topologico E su R con una norma continua
| |) e siano, per r ∈ R, r ≥ 0
Bn (r) = {x ∈ E : |x| < r}
B n (r) = {x ∈ E : |x| ≤ r}
53
Omotopia di applicazioni e di spazi
B3
1
2
3
Figura 2.8: bouquet di tre circonferenze
S n−1 (r) = {x ∈ E : |x| = r}
Per r = ∞ si ponga B n (∞) = Bn (∞) = Rn . La sfera unitaria S n−1
dello spazio è un retratto per deformazione di B n (s) \ Bn (r) per ogni r
e s tali che 0 < r ≤ 1 ≤ s ≤ ∞. La sfera S n−1 è anche un retratto per
deformazione di Bn (s) \ B n (r) per ogni r e s tali che 0 ≤ r < 1 < s ≤
∞. Una retrazione (esercizio) è data dall’applicazione h definita da
h(x) =
x
|x|
Un’omotopia tra la retrazione h e l’identità è data dall’applicazione
F (x, t) = tx + (1 − t)(
x
)
kxk
(esercizio).
Come caso particolare, lo spazio Rn privato di un suo punto (per esempio
dell’origine) si retrae per deformazione su S n−1 e dunque ha lo stesso tipo
di omotopia di S n−1 .
Per n ∈ N, n > 1 e r ∈ R, r > 0, sia p un punto della sfera S n−1 (r) di
Rn . Allora S n−1 \ {p} è contrattile (vedi esercizio 2.17) e dunque ha lo
stesso tipo di omotopia di un punto grazie al teorema 2.23.
◭
Esercizi 2.30. Si provi che:
1. L’insieme Bn (bouquet di n circonferenze) è omeomorfo a Fn (corolla con n petali),
per n ≥ 2.
2. Se p e q sono due punti distinti della sfera unitaria S n di Rn+1 , allora S n \ {p, q}
ha lo stesso tipo di omotopia di S n−1 .
3. Se p, q e r sono tre punti distinti della sfera unitaria S 2 di R3 , allora S 2 \ {p, q, r}
ha lo stesso tipo di omotopia della figura otto (vedi esempio II–7).
4. Siano ora X = {(x, y, z) ∈ R3 : y = z = 0}, Y = {(x, y, z) ∈ R3 : x = z = 0}
e Z = {(x, y, z) ∈ R3 : x = y = 0} gli assi coordinati di R3 . Si provi che:
54
Omotopia di applicazioni e di spazi
i) R3 \ {Z} ha lo stesso tipo di omotopia del cilindro C = {(x, y, z) ∈ R3 : x2 + y 2 =
1}.
ii) Posto X + = {(x, y, z) ∈ X : x ≥ 0}, l’insieme R3 \ X + è contrattile.
iii) L’insieme R3 \ {Z ∪ X + } ha lo stesso tipo di omotopia della figura otto.
iv) Il cilindro C = {(x, y, z) ∈ R3 : x2 + y 2 = 1} si retrae per deformazione su
S 1 = {(x, y, z) ∈ R3 : x2 + y 2 = 1, z = 0}.
5. Se p è un punto del toro T, allora T \ {p} ha lo stesso tipo di omotopia della figura
otto.
6. Se p è un punto del piano proiettivo P, allora P \ {p} ha lo stesso tipo di omotopia
di una circonferenza.
7. Se p è un punto della bottiglia di Klein K, allora K\{p} ha lo stesso tipo di omotopia
della figura otto.
8. Se p è un punto del nastro di Möbius M, allora M \ {p} ha lo stesso tipo di omotopia
della figura otto.
9. Se p è un qualunque punto della superficie S ottenuta come somma connessa di n
tori (n > 1), allora S \{p} ha lo stesso tipo di omotopia di F2n (corolla con 2n petali).
10. Se p è un qualunque punto della superficie S ottenuta come somma connessa di n
piani proiettivi (n > 1), allora S \ {p} ha lo stesso tipo di omotopia di Fn (corolla con
n petali).
11. Se p e q sono due qualunque punti distinti della superficie S ottenuta come somma
connessa di n tori (n > 1), allora S \ {p, q} ha lo stesso tipo di omotopia di F2n+1
(corolla con 2n + 1 petali).
12. Se p e q sono due qualunque punti distinti della superficie S ottenuta come somma
connessa di n piani proiettivi (n > 1), allora S \ {p, q} ha lo stesso tipo di omotopia
di Fn+1 (corolla con n + 1 petali).
13. Riconoscere, tra le coppie di spazi aventi lo stesso tipo di omotopia incontrate negli
esercizi precedenti, quelle in cui uno spazio è un retratto per deformazione dell’altro.
14. Si provi che lo spazio Bn (bouquet di n circonferenze) privato del suo punto (2n, 0)
si retrae per deformazione su Bn−1 (bouquet di n − 1 circonferenze).
15. Si provi che lo spazio Fn (corolla con n petali) privato del suo punto (1, 0) ha lo
stesso tipo di omotopia di Fn−1 (corolla con n − 1 petali).
55
Capitolo 3
Il gruppo fondamentale
3.1 Omotopia di cammini
In tutto il presente paragrafo X denoterà uno spazio topologico connesso per archi.
Un’applicazione continua dall’intervallo I = [0, 1] della retta reale R a valori in X si
dirà un cammino in X.
Siano x0 , x1 e x2 punti di X e siano f e g due cammini da x0 a x1 e da x1 a x2 ,
rispettivamente. L’applicazione
h:I→X
espressa dalle
h(t) =
f (2t)
per 0 ≤ t ≤ 12
g(2t − 1) per 12 ≤ t ≤ 1
(3.1)
è ben definita, in quanto f (2 21 ) = f (1) = x1 = g(0) = g(2 12 − 1), e continua. Poiché
h(0) = f (0) = x0 e h(1) = g(2 − 1) = g(1) = x2 si ha che h è un cammino in X da
x0 a x2 . Denoteremo h con f g, e diremo che h è ottenuto attaccando f e g.
Osservazione 3.1. La costruzione di h può descriversi come segue: anzitutto si identifica I, dominio di f , con [0, 21 ] passando da t a 1t = 2t ; poi si identifica I, dominio
2
di g, con [ 12 , 1] passando da t a (t − 12 )/ 12 = 2t − 1.
Si noti che lo studio delle classi di omotopia dei cammini definiti sull’intervallo I a
valori in un qualunque spazio topologico X, connesso per archi, è banale: essendo I
stellato, tutti i cammini in X sono omotopi ad un cammino costante (vedi proposizione 2.14). Nel seguito considereremo soltanto omotopie di cammini che lasciano fissi
gli estremi. Le classi di omotopia relativa che si vengono così a costruire assumono un
significato topologico molto interessante. Dunque se f e f ′ sono due cammini da x0 a
x1 , un’ omotopia F di f in f ′ è un’applicazione continua di I × I in X tale che
F (t, 0) = f (t) F (t, 1) = f ′ (t) per ogni
F (0, s) = x0
F (1, s) = x1
per ogni
56
t∈I
s ∈ I.
Il gruppo fondamentale
Quando in seguito parleremo di cammini omotopi, sottintenderemo sempre - salvo avviso contrario - che essi hanno gli stessi estremi. Useremo le stesse notazioni introdotte
nel paragrafo 2.2.
Lemma 3.2. Se f ∼ f ′ e g ∼ g′ , risulta f g ∼ f ′ g′ .
Dimostrazione. Poiché
f (0) = f ′ (0) = x0 f (1) = f ′ (1) = x1
g(0) = g′ (0) = x1 g(1) = g′ (1) = x2
esiste f ′ g′ . Siano F e G due omotopie di f in f ′ e di g in g′ , rispettivamente. Sia
H : I × I → X l’applicazione definita dalle
F (2t, s)
per 0 ≤ t ≤ 12 0 ≤ s ≤ 1
H(t, s) =
G(2t − 1, s) per 21 ≤ t ≤ 1 0 ≤ s ≤ 1
Anzitutto H è definita coerentemente, in quanto
1
1
F (2 , s) = F (1, s) = x1 = G(0, s) = G(2 − 1, s)
2
2
inoltre essa è continua (lemma 1.4). Infine si ha :
F (2t, 0) = f (2t) = f g(t)
per
H(t, 0) =
G(2t − 1, 0) = g(2t − 1) = f g(t) per
H(t, 1) =
F (2t, 1) = f ′ (2t) = f ′ g′ (t)
per
G(2t − 1, 1) = g′ (2t − 1) = f ′ g′ (t) per
H(0, s) = F (0, s) = x0 per
H(1, s) = G(1, s) = x2 per
0 ≤ t ≤ 21
1
2 ≤t≤1
0 ≤ t ≤ 21
1
2 ≤t≤1
0≤s≤1
0 ≤ s ≤ 1.
Dunque H è un’omotopia di f g in f ′ g′ .
QED
Definizione 3.3. L’applicazione t 7→ f (1 − t) definisce un cammino da x1 a x0 , che
indicheremo con f −1 .
Lemma 3.4. Se f ∼ f ′ , risulta f −1 ∼ f ′−1 .
Dimostrazione. Data un’omotopia F di f in f ′ , sia Fe : I × I → X l’applicazione
definita dalla
Fe(t, s) = F (1 − t, s)
Si verifica subito che Fe è un’omotopia di f −1 in f ′−1 .
QED
Lemma 3.5. Siano f, g, h tre cammini, da x0 a x1 , da x1 a x2 , da x2 a x3 , rispettivamente. Risulta (f g)h ∼ f (gh).
57
Il gruppo fondamentale
Dimostrazione. Si ha
per 0 ≤ t ≤ 14
f (4t)
1
(f g)(2t) per 0 ≤ t ≤ 2 =
((f g)h)(t) =
g(4t − 1) per 41 ≤ t ≤ 12
1
h(2t − 1) per 2 ≤ t ≤ 1
(f (gh))(t) =
f (2t)
per 0 ≤ t ≤
(gh)(2t − 1) per
1
2
1
2
≤t≤1=
g(4t − 2) per
h(4t − 3) per
3
4
1
2
≤t≤
3
4
≤t≤1
Consideriamo l’applicazione F : I × I → X definita dalla
t
4t
f ( s+1
) = f ( s+1
)
per 0 ≤ t ≤ s+1
4
4
t− s+1
s+2
per s+1
g( 1 4 ) = g(4t − s − 1)
F (t, s) =
4 ≤t≤ 4
4
s+2
t− s+2
4t−s−2
h( t− s+2
4
4
per s+2
)
=
h(
2−s ) = h( 2−s )
4 ≤t≤1
1−
4
4
L’applicazione F è continua. Inoltre
F (t, 0) = ((f g)h)(t)
F (t, 1) = (f (gh))(t)
per ogni 0 ≤ t ≤ 1. Infine, per 0 ≤ s ≤ 1, si ha
F (0, s) = f (0) = x0
F (1, s) = h(1) = x3
QED
Si consideri ora un punto x0 ∈ X e sia ex0 : I → X il cammino costante
ex0 (t) = x0
Vale il seguente:
Lemma 3.6. Sia f un cammino da x0 a x1 . Risulta
ex0 f ∼ f, f ex1 ∼ f.
58
Il gruppo fondamentale
Dimostrazione. a) Si ha
ex0 (2t)
per 0 ≤ t ≤ 12
ex0 f (t) =
f (2t − 1) per 21 ≤ t ≤ 1
Sia F : I × I → X l’applicazione definita dalle
per 0 ≤ t ≤ 2s
ex0 (t)
F (t, s) =
s
f ( t− 2s ) = f ( 2t−s ) per s ≤ t ≤ 1
1−
2−s
2
2
L’applicazione F è continua. Inoltre
per 0 ≤ t ≤ 1
F (t, 0) = f (t)
F (t, 1) =
ex0 (2t)
per 0 ≤ t ≤ 12
f (2t − 1) per 12 ≤ t ≤ 1
= (ex0 f )(t) per 0 ≤ t ≤ 1
F (0, s) = x0
F (1, s) = x1
per 0 ≤ s ≤ 1
b) Essendo e−1
x1 = ex1 , per a) risulta
−1
(f ex1 )−1 = e−1
= ex1 f −1 ∼ f −1
x1 f
onde, per il lemma 3.4
f ex1 ∼ f
QED
I punti iniziali e finali dei cammini f f −1 e f −1 f coincidono rispettivamente, con x0 e
x1 .
Lemma 3.7. Risulta f f −1 ∼ ex0 e similmente f −1 f ∼ ex1 .
Dimostrazione. a) Per 0 ≤ s ≤ 1, sia fs : I → X l’applicazione definita dalla
fs (t) = f (st). Risulta che fs è un cammino da x0 a f (s) e si ha che f1 = f , f0 = ex0 .
Essendo fs−1 (t) = fs (1 − t) = f (s(1 − t)), il cammino fs fs−1 è definito dalle
fs (2t) = f (2st)
per 0 ≤ t ≤ 12
−1
fs fs =
fs−1 (2t − 1) = fs (2 − 2t) = f (2s(1 − t)) per 12 ≤ t ≤ 1.
Sia F : I × I → X l’applicazione definita dalla
F (t, s) = fs fs−1 (t)
Si verifica facilmente che F è continua. Infatti le applicazioni
(t, s) 7→ fs (2t) = f (2ts)
59
Il gruppo fondamentale
(t, s) 7→ fs (2 − 2t) = f (2s(1 − t))
sono continue, rispettivamente, nei rettangoli
{(t, s) : 0 ≤ t ≤
1
,
2
0 ≤ s ≤ 1}
e
1
≤ t ≤ 1, 0 ≤ s ≤ 1}
2
e, per t = 12 , esse coincidono con l’applicazione
{(t, s) :
1
s 7→ F ( , s) = fs (1) = f (s)
2
definita per 0 ≤ s ≤ 1.
Inoltre
F (t, 0) = f (0) = x0 , F (t, 1) = f f −1 (t)
F (0, s) = x0 ,
per
0≤t≤1
F (1, s) = fs fs−1 (1) = f (0) = x0 per
0≤s≤1
Dunque F è un’omotopia di f f −1 in ex0 .
b) Poiché il punto iniziale di f −1 è x1 , per quanto visto in a) risulta
f −1 f ∼ ex1
QED
3.2 Il gruppo fondamentale
In questo paragrafo considereremo, nello spazio topologico X, connesso per archi,
cammini aventi punto iniziale e punto finale coincidenti in un punto x0 . Chiameremo
tali cammini cappi in X di origine x0 . Considereremo soltanto omotopie di cappi di
origine x0 , supponendo tacitamente che tali omotopie siano relative a x0 .
Dai risultati del paragrafo precedente discende il
Teorema 3.8. L’ insieme delle classi di omotopia dei cappi di origine x0 composti
nel modo definito dalla equazione 3.1 e con l’operazione di inversione introdotta nella
definizione 3.3, è un gruppo.
Questo gruppo prende il nome di gruppo fondamentale, o gruppo di Poincaré di X di
origine x0 , e si indica con Π1 (X, x0 ).
In seguito indicheremo con [f ] la classe di omotopia del cappio f . Risulta per il lemma 3.4 [f ]−1 = [f −1 ]. Inoltre l’elemento identico del gruppo è la classe di omotopia e
di ex0 .
Il ruolo del punto x0 è precisato dalla seguente
60
Il gruppo fondamentale
Proposizione 3.9. Dati x0 e x1 in X, esiste un isomorfismo di Π1 (X, x0 ) su Π1 (X, x1 ).
Dimostrazione. Sia σ un cammino da x0 a x1 . Ad ogni cappio f di origine x0 , si
associ il cappio σ −1 f σ di origine x1 . Se f ′ è un cappio di origine x0 omotopo a f ,
per il corollario 2.19 σ −1 f ′ σ è un cappio di origine x1 omotopo a σ −1 f σ. Indichiamo
con σ# l’applicazione di Π1 (X, x0 ) in Π1 (X, x1 ) che alla classe di omotopia [f ] di f
in Π1 (X, x0 ) associa la classe di omotopia [σ −1 f σ] di σ −1 f σ in Π1 (X, x1 ). Poiché,
per il lemma 3.7, il cappio σσ −1 è omotopo a ex0 , cioè la classe di omotopia di σσ −1
è l’elemento identico di Π1 (X, x0 ), dati due cappi f1 e f2 di origine x0 , è
σ −1 f1 f2 σ ∼ σ −1 f1 σσ −1 f2 σ ∼ (σ −1 f1 σ)(σ −1 f2 σ)
ossia
σ# ([f1 ][f2 ]) = σ# ([f1 ])σ# ([f2 ])
Inoltre
σ# ([ex0 ]) = [ex1 ]
Infine
(σ −1 )# σ# ([f ]) = (σ −1 )# ([σ −1 f σ]) = [σσ −1 f σσ −1 ] = [f ]
per ogni cappio f di origine x0 , sicché
(σ −1 )# σ# = id in
Π1 (X, x0 )
e similmente
σ# (σ −1 )# = id in
Π1 (X, x1 )
QED
Si osservi che
(σ −1 )# = (σ# )−1
Sia τ un altro cammino da x0 a x1 . Il cammino στ −1 è un cappio di origine x0 , per il
quale risulta
−1
−1
τ#
σ# ([f ]) = τ#
([σ −1 f σ]) =
= [τ σ −1 f στ −1 ] = [(στ −1 )−1 f (στ −1 )] = [στ −1 ]−1 [f ][στ −1 ]
Ne segue il
Lemma 3.10. Dati due cammini da x0 a x1 , esiste un automorfismo interno Γ di
Π1 (X, x0 ) tale che
σ# = τ # ◦ Γ
61
Il gruppo fondamentale
Dunque Π1 (X, x0 ) e Π1 (X, x1 ) sono isomorfi, ma non canonicamente isomorfi.
Indicheremo con Π1 (X) il gruppo Π1 (X, x) per un x ∈ X prefissato, con la convenzione che, al variare di x, Π1 (X) è definito a meno di un isomorfismo.
Siano X e Y due spazi topologici connessi per archi e sia φ : X → Y un’applicazione
continua di X in Y . Se f è un cappio in X con origine x0 , l’applicazione φ ◦ f è un
cappio in Y con origine φ(x0 ). Inoltre, se f ′ è un altro cappio in X con origine x0 e
omotopo a f , per il corollario 2.19 φ ◦ f ′ è un cappio in Y con origine φ(x0 ) e omotopo
a φ ◦ f . È dunque definita un’applicazione
φ⋆ : Π1 (X, x0 ) → Π1 (Y, φ(x0 ))
Se f1 e f2 sono due cappi in X con origine x0 , è
φ⋆ ([f1 ][f2 ]) = [φ ◦ f1 f2 ] = [(φ ◦ f1 )(φ ◦ f2 )] = [φ ◦ f1 ][φ ◦ f2 ] = φ⋆ ([f1 ])φ⋆ ([f2 ]).
Inoltre, φ ◦ ex0 = eφ(x0 ) , quindi
φ⋆ ([ex0 ]) = [eφ(x0 ) ].
Vale dunque il
Lemma 3.11. L’applicazione φ⋆ è un omomorfismo.
Lemma 3.12. Sia Z uno spazio topologico connesso per archi e sia ψ : Y → Z
un’applicazione continua . Risulta
(ψ ◦ φ)⋆ = ψ⋆ ◦ φ⋆
Dimostrazione.
(ψ ◦ φ)⋆ ([f ]) = [ψ ◦ φ ◦ f ] = ψ⋆ ([φ ◦ f ]) = ψ⋆ ◦ φ⋆ ([f ])
QED
Siano φ0 e φ1 due applicazioni continue omotope di X in Y . Se F : X × I → Y è
un’omotopia di φ0 in φ1 l’applicazione λ : I → Y definita dalla
λ(t) = F (x0 , t)
è un cammino in Y da φ0 (x0 ) in φ1 (x0 ).
Teorema 3.13. Risulta
φ1⋆ = λ# ◦ φ0⋆
Dimostrazione. Sia f un cappio in X con origine x0 . Poiché
φ1⋆ ([f ]) = [φ1 ◦ f ]
e
λ# ◦ φ0⋆ ([f ]) = λ# ([φ0 ◦ f ]) = [λ−1 (φ0 ◦ f )λ],
62
Il gruppo fondamentale
dobbiamo provare che
φ1 ◦ f ∼ λ−1 (φ0 ◦ f )λ
Si consideri l’applicazione G : I × I → Y definita da
G(t, s) = F (f (t), s)
L’applicazione G è continua. Inoltre, per 0 ≤ t ≤ 1,
G(t, 0) = F (f (t), 0) = (φ0 ◦ f )(t)
G(t, 1) = F (f (t), 1) = (φ1 ◦ f )(t)
e per 0 ≤ s ≤ 1,
G(0, s) = F (f (0), s) = F (x0 , s) = λ(s)
G(1, s) = F (f (1), s) = F (x0 , s) = λ(s)
Consideriamo nel quadrato chiuso I × I il segmento α di estremi (0, 1) e (1, 1) e la
spezzata β individuata dalla sequenza ordinata di vertici (0, 1), (0, 0), (1, 0) e (1, 1). In
I × I, i cammini α e β sono omotopi ad estremi fissi (la verifica è un facile esercizio),
e dunque le loro immagini attraverso G in Y sono curve omotope a estremi fissi in Y .
Una verifica diretta mostra che G ◦ α = φ1 ◦ f e G ◦ β = λ−1 (φ0 ◦ f )λ, da cui la tesi.
QED
Teorema 3.14. Se due spazi topologici connessi per archi hanno lo stesso tipo di
omotopia, i rispettivi gruppi fondamentali sono isomorfi .
Dimostrazione. Siano φ : X → Y e ψ : Y → X due equivalenze omotopiche, cioè
due applicazioni continue tali che
ψ ◦ φ ∼ idX
φ ◦ ψ ∼ idY
Per il teorema precedente (ψ ◦ φ)⋆ e (φ ◦ ψ)⋆ sono automorfismi di Π1 (X) e Π1 (Y ).
Dal lemma 3.12 segue che φ⋆ è un isomorfismo di Π1 (X, x) in Π1 (Y, φ(x)).
QED
Definizione 3.15. Uno spazio topologico connesso per archi X tale che Π1 (X) sia
banale si dice semplicemnete connesso.
Poiché il gruppo fondamentale dello spazio ridotto ad un punto è banale, dal teorema
2.23 segue il
Corollario 3.16. Uno spazio contrattile è semplicemente connesso.
Dal teorema 3.14 segue il
63
Il gruppo fondamentale
Teorema 3.17. Se Y è un retratto per deformazione di X, l’inclusione i : Y → X
determina un isomorfismo i⋆ : Π1 (Y, y0 ) → Π1 (X, y0 ).
Dati due spazi connessi per archi X e Y , il prodotto topologico X × Y è connesso per
archi. Siano x0 ∈ X e y0 ∈ Y e siano prX , prY le proiezioni canoniche su X e su Y .
Teorema 3.18. Il gruppo Π1 (X×Y, (x0 , y0 )) è canonicamente isomorfo a Π1 (X, x0 )×
Π1 (Y, y0 ).
Dimostrazione. Se f : I → X × Y è un cappio con punto iniziale (x0 , y0 ), le
applicazioni fX = prX ◦f e fY = prY ◦f sono due cappi in X e in Y con punti iniziali
x0 e y0 . L’applicazione f 7→ (fX , fY ) è un’applicazione suriettiva dell’ insieme dei
cappi in X × Y con punto iniziale (x0 , y0 ) nel prodotto cartesiano degli insiemi dei
cappi in X e in Y , rispettivamente, con punti iniziali x0 e y0 . Dati infatti due cappi
f1 : I → X,
f1 (0) = x0 ,
f2 : I → Y,
f2 (0) = y0 ,
l’applicazione
f : t 7→ (f1 (t), f2 (t))
è un cappio in X × Y , con f (0) = (x0 , y0 ) e tale che fX = f1 , fY = f2 .
Dal corollario 2.19 segue che, se f ′ : I → X × Y è un cappio in X × Y con lo
′ , f ∼ f ′ (le omotopie
stesso punto iniziale di f , e tale che f ∼ f ′ , risulta fX ∼ fX
Y
Y
essendo omotopie relative ai punti (x0 , y0 ), x0 e y0 rispettivamente).
Pertanto è definita un’applicazione canonica suriettiva
Π1 (X × Y, (x0 , y0 )) → Π1 (X, x0 ) × Π1 (Y, y0 )
che è un omomorfismo. Infatti se f e g sono due cappi in X × Y , con origine (x0 , y0 ),
risulta
(f g)X = fX gX ,
(f g)Y = fY gY .
Inoltre le immagini mediante prX e prY dell’elemento identico di Π1 (X × Y, (x0 , y0 ))
sono gli elementi identici di Π1 (X, x0 ) e di Π1 (Y, Y0 ).
L’omomorfismo è iniettivo. Infatti, se f è tale che fX ∼ ex0 , e fY ∼ ey0 , e se F1 e F2
sono le rispettive omotopie, l’applicazione
(t, s) 7→ (F1 (t, s), F2 (t, s))
è un’omotopia di f con e(x0 ,y0 ) .
QED
64
Il gruppo fondamentale
3.3 Prodotti liberi di gruppi e loro quozienti
Sia {Gi }i∈I una famiglia di gruppi. Supponiamo che per i diversi gli elementi dei Gi
siano distinti. Denotiamo
E = ∪i∈I Gi
e sia W (E) l’insieme delle parole di E, cioè
W (E) = {a1 a2 ...an : n ∈ N e ai ∈ E per i = 1, ..., n}
Il numero degli elementi di E che compongono una parola w è detto lunghezza della
parola w (denotato con lg(w) ). L’unica parola di lunghezza zero è detta parola vuota
e denotata w0 .
Definiamo su W (E) un prodotto tra parole: se w = a1 ...an e w′ = a′1 ...a′m si ponga
ww′ = a1 ...an a′1 ...a′m .
L’insieme W (E) dotato di questo prodotto è un semigruppo il cui elemento neutro
è la parola vuota wo . Poiché lg(w + w′ ) = lg(w) + lg(w′ ) nessuna parola non vuota
ha inverso.
Indichiamo con ≈ la seguente relazione tra gli elementi di W (E):
Definizione 3.19. Si dice che due parole w e w′ di W (E) sono equivalenti (w ≈ w′ ),
se una delle due parole può essere cambiata nell’altra per mezzo di un numero finito
di operazioni del tipo seguente:
a) cancellazione da una parola di un elemento e che sia elemento unità per qualche
G1 o introduzione di un tale elemento:
wew′ ≈ ww′
b) rimpiazzamento di due elementi consecutivi xy, appartenenti allo stesso Gi mediante l’elemento z uguale al loro prodotto in Gi o rimpiazzamento di z con
xy:
wxyw′ ≈ wzw′ .
Proposizione 3.20. La relazione ≈ sopra definita è una relazione di equivalenza; il
prodotto passa al quoziente delle classi di equivalenza, che sarà indicato W (E)/W0
(W0 è la classe di equivalenza della parola vuota w0 ). Il quoziente W (E)/W0 è un
gruppo.
Dimostrazione. Esercizio. (Suggerimento: si definisca come inversa di w = a1 ...an la
−1
parola w = a−1
n ...a1 ).
QED
Il gruppo W (E)/W0 si dice prodotto libero della famiglia di gruppi {Gi }i∈I e
si indica ∗i∈I Gi Nel caso che I = {i1 , ..., in } sia un insieme finito si scrive anche
Gi1 ∗ Gi2 ∗ ... ∗ Gin .
65
Il gruppo fondamentale
Definizione 3.21. Una parola w = a1 a2 ...an si dice ridotta se:
1. nessun ai è l’elemento neutro di qualche Gj ;
2. non ci sono elementi consecutivi appartenenti allo stesso gruppo Gi .
L’esempio più semplice di parola ridotta è quello costituito da un elemento di E che
non sia elemento neutro di qualche Gi .
Teorema 3.22. Ogni classe di equivalenza di W (E) contiene una, ed una sola, parola
ridotta.
Dimostrazione. Se w = a1 a2 ...ar è ridotta e se a ∈ E otteniamo una parola ridotta
| aw |≈ aw ponendo
a1 a2 ...ar
se a è un elemento neutro
aa1 a2 ...ar
se a non è un elemento neutro e
non sta nello stesso gruppo Gi di a1
ba2 ...ar
| aw |=
se a non è un elemento neutro,
appartiene allo stesso gruppo Gi di a1 e
b = aa1 non è un elemento neutro
a2 ...ar
se a non è un elemento neutro,
appartiene allo stesso gruppo Gi di a1 e
a = a−1
1
Data a ∈ E sia ora Ta la funzione definita, sull’insieme delle parole ridotte, come
w 7→| aw |. Per w1 ridotta o no, w1 = b1 ...br , poniamo:
Tw1 = Tb1 ◦ ... ◦ Tbr
Se w0 indica come al solito la parola vuota, per definizione si ha che, per ogni w ∈
W (E), la parola Tw (w0 ) è ridotta ed equivalente a w. Inoltre si prova subito che se
x, y, z ∈ Gi e se xy = z, allora
Tz = Tx ◦ Ty
e che Te è l’identità se e è l’elemento neutro di qualche Gi . Di conseguenza, se w1 ≈
w2 , si ha Tw1 = Tw2 ; in particolare quando w0 è la parola vuota si ha Tw1 (w0 ) =
Tw2 (w0 ). Dunque nel caso in cui w1 ≈ w2 siano due parole equivalenti e ridotte si
ottiene
w1 = Tw1 (w0 ) = Tw2 (w0 ) = w2
Dunque ogni classe di equivalenza in W (E) contiene una ed una sola parola ridotta.
QED
66
Il gruppo fondamentale
Teorema 3.23. Dato un gruppo G, una famiglia {Gi }i∈I di gruppi ed una famiglia di
omomorfismi {hi }i∈I , hi : Gi → G, esiste uno, ed un solo, omomorfismo
h : ∗i∈I Gi → G
tale che h |Gi = hi .
Dimostrazione. Una qualunque funzione g : E → G può essere estesa ad una funzione
g̃ : W (E) → G
ponendo
g̃(a1 a2 ...an ) = g(a1 )g(a2 )...g(an )
Nel nostro caso definiamo
h : W (E) → G
come
h(a1 a2 ...an ) = hi1 (a1 )...hin (an )
dove aj ∈ Gij per j = 1, ..., n. L’applicazione h risulta un omomorfismo di semigruppi
e si ha, se aj aj+1 = b in Gij
hij (aj )hij (aj+1 ) = hij (b)
Inoltre, se e ∈ Gi è l’elemento neutro, hi (e) è l’elemento neutro di G. Cioè h passa al
quoziente W (E)/W0 . Pertanto si può definire un omomorfismo
h∗ : ∗i∈I Gi → G
L’unicità segue dal fatto che un qualunque omomorfismo con le proprietà richieste
coincide con h su E.
QED
Definizione 3.24. Si dice gruppo libero il prodotto libero di una famiglia di gruppi
ciascuno dei quali è ciclico infinito.
Teorema 3.25. Il centro di un gruppo libero G = ∗i∈I Gi con almeno due fattori è
banale.
Dimostrazione. Supponiamo che a1 ...ar sia una parola ridotta nel centro del gruppo e
che ai ∈ Gji per i = 1, . . . , r. Siccome G contiene almeno due fattori, esiste a ∈ Gi1
con (i1 6= j1 ) che non è un elemento neutro. Allora aa1 ..ar è ridotta. Anche la parola
a1 ..ar a deve essere ridotta, altrimenti
a1 ..ar a ≈ a1 ..ar−1 a′
con lg(a1 ..ar−1 a′ ) < lg(a1 ..ar a), cioè esisterebbe una parola ridotta equivalente ad
aa1 ..ar e di lunghezza minore. Ciò sarebbe in contraddizione con il Teorema . Pertanto
a1 ..ar = w0
QED
Sia data una famiglia di coppie di parole R = {(Sj , Tj )}j∈J di W (E).
67
Il gruppo fondamentale
Definizione 3.26. Si dice che due parole di W (E) sono R-equivalenti se una può essere
cambiata nell’altra con un numero finito di operazioni di tipo a), b), (vedi la Definizione
3.19) e
c) rimpiazzamento di Sj con Tj o di Tj con Sj , per j ∈ J.
Se due parole w e w′ sono R-equivalenti scriviamo w ≈R w′
Proposizione 3.27. La R-equivalenza è una relazione di equivalenza. L’operatore di
prodotto in W (E) passa al quoziente in W (E)/≈R . Poiché ≈⇒≈R , indicando con
WR la classe di R-equivalenza della parola vuota w0 si ha W0 ⊆ WR e si usano le
seguenti notazioni:
W (E)/≈R := W (E)/WR = ∗i∈I Gi /R
è un gruppo detto quoziente del prodotto libero ∗i∈I Gi rispetto all’insieme di relazioni
R.
Dimostrazione. Esercizio.
3.4 Il teorema di Van Kampen
I due seguenti teoremi contengono i risultati più significativi ottenuti da Van Kampen
sul calcolo del gruppo fondamentale.
Teorema 3.28. Supponiamo che lo spazio topologico X = X1 ∪ X2 sia l’unione di
due insiemi X1 e X2 aperti connessi per archi la cui intersezione X0 = X1 ∩ X2
sia non vuota e connessa per archi. Se Π1 (X), Π1 (X1 ), Π1 (X2 ) indicano i gruppi
fondamentali di X, X1 , X2 , rispettivamente, tutti di punto base a ∈ X0 e se ji :
Π1 (X0 ) → Π1 (Xi ), (i = 1, 2), indica l’omomorfismo indotto dall’inclusione X0 ⊆
Xi (i = 1, 2), sia J l’insieme di relazioni
J = {(j1 (α), j2 (α)),
α ∈ Π1 (X0 )}
Allora Π1 (X) ∼
= (Π1 (X1 ) ∗ Π1 (X2 ))/J
Dimostrazione. Siano
hi : Π1 (Xi ) → Π1 (X)
(i = 1, 2)
gli omomorfismi indotti dall’inclusione, e sia
h : Π1 (X1 ) ∗ Π1 (X2 ) → Π1 (X)
l’omomorfismo indotto dalla famiglia {hi }i=1,2 secondo quanto stabilito nel teorema
3.23). Una formulazione algebrica precisa della tesi da dimostrare è la seguente:
h è surgettiva ed ha lo stesso nucleo della proiezione canonica di Π1 (X1 ) ∗
Π1 (X2 ) su (Π1 (X1 ) ∗ Π1 (X2 ))/J
68
Il gruppo fondamentale
Come sappiamo, se E = Π1 (X1 ) ∪ Π1 (X2 ) e se W (E) = W è il semigruppo delle
parole studiato nel paragrafo precedente, indicando con W0 e Wj , rispettivamente, le
classi di ≈-equivalenza e di J-equivalenza della parola vuota w0 , si ha
W0 ⊆ WJ
e
W/WJ = (Π1 (X1 ) ∗ Π1 (X2 ))/J
Pertanto, se hc : W → W/W0 = Π1 (X1 ) ∗ Π1 (X2 ) è la proiezione canonica e se
h̃ = h ◦ hc : W → Π1 (X1 )
per dimostrare il teorema è sufficiente provare che:
h̃ è surgettiva ed il suo nucleo è WJ .
Iniziamo ora la effettiva dimostrazione del teorema. Un cammino di X si dice corto se
è tutto contenuto in X1 , oppure tutto contenuto in X2 . Per ogni x ∈ X, sia d(x) un
cammino corto che colleghi x con il punto a ∈ X0 scelto nell’enunciato, stando tutto in
Xi se x ∈ Xi , i = 1, 2. Per un cappio u di X0 siano, [u] la sua classe di equivalenza
in Π1 (X), [u]j la sua classe di equivalenza in Π1 (Xj ), (j = 0, 1, 2).
Surgettività di h̃. Sia w un cappio in X di punto base a e sia S una suddivisione di
w in cammini corti
w = w1 w2 ...wn
Per trovare S si fa riferimento al numero di Lebesgue del ricoprimento di [0, 1] fatto
mediante w−1 (X1 ) e w−1 (X2 ) (per la definizione di numero di Lebesgue si veda il
capitolo sui rivestimenti di queste dispense). Vogliamo ora associare a (w, S) due
parole di W che indicheremo M 1 (w, S) e M 2 (w, S); a questo scopo sia ti il punto
finale di wi e sia di = d(ti ).
wn′ = d−1
Posto w1′ = w1 d1 , w′ i = d−1
n−1 wn si ha
i−1 w1 di (i = 2, ...n − 1),
che
−1
−1
w′ = w′ 1 ...w′ n = w1 d1 d−1
1 w2 d2 d2 ...d−1 wn ∼ w1 ...wn = w
e che w′ i è un cappio corto contenuto nello stesso Xj di wi (i = 1...n; j = 1, 2).
Associamo ora a w′ la parola M 1 (w, S) di W ottenuta sostituendo a w′ i , per i =
1, . . . n:
[w′ i ]1 se w′ i ⊂ X1
[w′ i ]2
se w′ i 6⊂ X1
e la parola M 2 (w, S) di W ottenuta sostituendo a w′ i , per i = 1, . . . n:
[w′ i ]2
se w′ i ⊂ X2
[w′ i ]1
se w′ i 6⊂ X2
69
Il gruppo fondamentale
Le parole M 1 (w, S) e M 2 (w, S) differiscono solo per le lettere corrispondenti a w′ i
contenuti sia in X1 che in X2 (cioè in X0 ), per le quali si ha
[w′ i ]1 = j1 [w′ i ]0
e
[w′ i ]2 = j2 [w′ i ]0
Pertanto M 1 (w, S) ≈J M 2 (w, S). Se wi′ ∈ Π1 (Xj) si ha hj ([w′ i ]j ) = [w′ i ] ∈
Π1 (X) (i = 1...n; j = 1, 2) Per definizione di h̃ si ha
h̃(M 1 (w, S)) = h̃(M 2 (w, S)) = [w′ ] = [w]
che prova la surgettività di h̃.
Nel seguito della dimostrazione si farà uso dei fatti seguenti, di immmediata verifica:
1. se nel prodotto di cammini w = w1 ...wn sostituiamo wi con un altro cammino
corto vi omotopo a wi in Xk (k = 1 o 2), la parola M j (w, S) non cambia
(j = 1, 2);
2. se togliamo o aggiungiamo nel prodotto w1 ...wn un cappio corto di punto base
a ∈ X0 omotopo alla costante in X0 , l’unico effetto su M j (w, S) (j = 1, 2)
è quello di togliere o aggiungere un elemento neutro. M j (w, S) resta pertanto
nella stessa classe di J-equivalenza ;
3. se la suddivisione S ′ di w è ottenuta da S dividendo uno dei cammini corti
wi in ui vi , allora M 1 (w, S) ≈J M 1 (w, S ′ ) (J = 1, 2). Pertanto la classe
di J-equivalenza di M 1 (w, S) e M 2 (w, S) non dipende dalla suddivisione in
cammini corti usata.
Calcolo di Ker(h̃). Sia w ∼ ea in X e sia M = [w1 ]i1 · · · [wp ]ip (dove ij ∈ {1, 2}
per j = 1, . . . p) una parola di W (E) tale che ˜(h)(M ) = [w]. Dobbiamo provare che
M ∈ WJ .
Se w ∼ ea sia F : I × I → X l’omotopia. Si ha:
F (t, 0) = w(t)
F (t, 1) = a
F (0, s) = a
F (1, s) = a
per
t, s ∈ I.
Scegliamo una suddivisione di I ×I in quadratini uguali tra loro, di diametro minore del
numero di Lebesgue del ricoprimento {F −1 (X1 ), F −1 (X2 ). Siano essi m2 quadratini
Ordiniamo i quadratini in modo che quello di centro (s, t) venga prima di quello di
centro (s′ , t′ ) se t < t′ o t = t′ e s < s′ . Sia vi la spezzata fatta di 2m lati di quadratini
che collega il vertice (0, 1) con (1, 0)di I × I lasciando sotto i primi quadratini (0 <
70
Il gruppo fondamentale
i < n), vi = αi ...α2m . Siano αr αr+1 due lati dell’(i+1)-esimo quadratino e siano βr
e βr+1 gli altri due lati
F (α1 )F (α2 )...F (αr )F (αr+1 )...F (α2m )
è una suddivisione in cammini corti di F (vi ).
Usando i), ii), iii) e sottintendendo la suddivisione S si prova che
M j (F (vi )) =
≈J
≈J
≈J
(per
M j (F (α1 )...F (αr )F (αr+1 )...F (α2m )) ≈J
M j (F (α1 )...F (αr αr+1 )...F (α2m )) ≈J
M j (F (α1 )...F (βr βr+1 )...F (α2m )) ≈J
M j (F (α1 )...F (βr )F (βr+1 )...F (α2m )) = M j (F (vi + 1))
0 ≤ i < m2 ). Pertanto
M ≈J M j (F (v0 ) ≈J M j (F (vm2 ) ≈J M j (ea ) ≈J (w0 )
QED
Teorema 3.29. Sia X uno spazio topologico connesso per archi e sia X = X1 ∪ X2
l’unione di due sottoinsiemi aperti, connessi per archi. Se X1 ∩ X2 = A ∪ B è l’unione
di due insiemi aperti, non vuoti, disgiunti, connessi per archi A e B e se X2 , A, B,
sono semplicemente connessi, allora
Π1 (X) ∼
= Π1 (X1 ) ∗ Z.
Dimostrazione. Sia a ∈ A e siano Π1 (X) = Π1 (X, a) e Π1 (X1 ) = Π1 (X1 , a).
Sia b ∈ B e siano c1 un cammino in X1 che colleghi a con b e c2 un cammino in X2
che colleghi b con a. Posto c = c1 c2 e detto γ un generatore di Z, per il teorema 3.23
esiste un unico omomorfismo
h : Π1 (X1 ) ∗ Z → Π1 (X1 )
tale che h(γ) = [c] e che h |Π1 (X1 ) sia l’omomorfismo indotto da X1 ⊆ X. Se
hc : W (Π1 (X1 ) ∪ Z) = W → W/W0
è la proiezione canonica sul quoziente e se h̃ = h ◦ hc : W → Π1 (X), la tesi del
teorema diventa (analogamente al caso del teorema 3.28):
h̃ è surgettiva e il suo nucleo è W0 .
Le tecniche ed il metodo di dimostrazione sono del tutto simili a quelli esposti nella
dimostrazione del teorema 3.28.
QED
71
Il gruppo fondamentale
3.5 Esempi ed applicazioni
a) Per n ∈ N sia
S n = {x = (x1 , ..., xn+1 ) ∈ Rn+1 :
n+1
X
x2i = 1}
i=1
e siano p e q due punti distinti di S n . Allora S n = S n \ {p} ∪ S n \ {q}; inoltre S n \ {p}
S n \ {q} hanno lo stesso tipo di omotopia di un punto (esercizio). Se n ≥ 2 si può
applicare il teorema 3.28 con X = S n , X1 = S n \ {p}, X2 = S n \ {q}. Pertanto
Π1 (S n ) = 1
(n ≥ 2).
Se n = 1 si può applicare il teorema 3.29 avendosi X1 ∩ X2 = S 1 \ {p, q}.
Risulta pertanto
Π1 (S 1 ) = 1 ∗ Z = Z.
b) Il gruppo fondamentale di n cerchi che si incontrano in uno stesso punto.
Sia dato nel piano cartesiano, per s ∈ N, l’insieme
Cs = {(x, y) ∈ R2 : (x − s)2 + y 2 = s2 }
e sia
Bn =
n
[
Cs .
s=1
Sia qn ∈ Cn , qn = (2n, 0). Si può scomporre Bn nel modo seguente
Bn = Bn \ {qn } ∪ Cn \ {0}.
Posto Bn = X, Bn \{qn } = X1 , Cn \{0} = X2 si ha che Π1 (Bn \{qn }) = Π1 (Bn−1 ),
e grazie al teorema 3.29
Π1 (Bn ) = Π1 (Bn−1 ) ∗ Z.
Pertanto, tenendo onto della parte a),
Π1 (Bn ) = Z ∗ Z ∗ ...Z
(n
volte).
Esercizi. Calcolare i gruppi fondamentali dei seguenti spazi:
i) una corona circolare;
ii) il nastro di Moëbius;
iii) il toro di dimensione 2 a cui si sia tolto un punto;
iv) la bottiglia di Klein a cui si sia tolto un punto;
v) il piano proiettivo a cui si sia tolto un punto;
72
Il gruppo fondamentale
c) Attaccamento di una n-cella ad uno spazio topologico.
Si considerino in Rn i seguenti insiemi:
D n = {x = (x1 , ..., xn ) ∈ Rn :
n
X
x2i ≤ 1}
i=1
S n−1 = {x = (x1 , ..., xn ) ∈ Rn :
en = {x = (x1 , ..., xn ) ∈ Rn :
n
X
i=1
n
X
x2i
i=1
x2i = 1}
< 1}
Supponiamo che Y sia uno spazio topologico e che f : S n−1 → Y sia una funzione
continua. Consideriamo l’unione disgiunta Y ˚
∪Dn di Y e D n con la seguente relazione
di equivalenza ∼ :
x∼y
se x = y
o
x = f (y) o
f (x) = y
o
f (x) = f (y).
Lo spazio quoziente, dotato dalla topologia quoziente, si indica con Y ∪f D n e si dice
ottenuto attaccando ad Y una n-cella mediante f.
Per calcolare il gruppo fondamentale di Y ∪f D n , si scelga un punto p interno a D n
e si ponga
X1 = (Y ∪f Dn ) \ {p}
X2 = en .
Poiché D n \ {p} ha lo stesso tipo di omotopia di S n−1 , si ottiene che X1 ha lo stesso
tipo di omotopia di Y e dunque
Π1 (X1 ) ∼
= Π1 (Y ).
Inoltre en \ {p} ha lo stesso tipo di omotopia di S n−1 ; dunque
Π1 (en \ {p}) ∼
= Π1 (S n−1 ).
Il teorema 3.28 permette di stabilire che:
Π1 (Y ∪f Dn ) ∼
= Π1 (Y ) se n ≥ 3.
Nel caso n = 2, Π1 (e2 \ {p}) ∼
=
= Z, e detto γ un generatore di Π1 (S 1 ) ∼
= Π1 (S 1 ) ∼
2
Π1 (e \ {p}), si ottiene (vedi teorema 3.28)
J = {f∗ (γ) = 1}
ove f∗ : Π1
(S 1 )
→ Π1 (Y ) è l’omomorfismo indotto da f : (S 1 ) → (Y ). Pertanto
Π1 (Y ∪f D2 ) ∼
= Π1 (Y )/{f∗ (γ) = 1}
Nel caso n = 1 aplicando il teorema 3.29 con X1 = Π1 (Y ∪f D 1 ) \ {p} e X2 = e1 si
conclude che
Π1 (Y ∪f D 1 ) \ {p} ∼
= Π1 (Y ) ∗ Z.
Esercizi. Calcolare i gruppi fondamentali dei seguenti spazi:
73
Il gruppo fondamentale
vi) il toro ;
vii) la bottiglia di Klein;
viii) lo spazio proiettivo;
ix) la somma connessa di tori;
x) la somma connessa di spazi proiettivi;
xi) tutti i possibili spazi ottenuti attaccando due 1-celle alla figura B2 (vedi parte b);
d) Nodi.
Il nodo è una curva chiusa semplice di R3 . Il gruppo fondamentale del complementare (in R3 ) di un nodo N è detto gruppo fondamentale del nodo ed indicato
Π(N ).
Due nodi N1 , N2 si dicono dello stesso tipo se esiste un omeomorfismo di R3 che
trasforma l’uno nell’altro. In questo caso, ovviamente, Π(N1 ) Π(N2 ) sono isomorfi.
Esempio. Calcolo del gruppo della circonferenza.
Sia S 1 = {(x, y, z) ∈ R3 : z = 0, x2 + y 2 = 1}.
Il gruppo fondamentale della circonferenza Π(S 1 ) è dato da Π1 (R3 \ S 1 ), gruppo
fondamentale di R3 \ S 1 . Posto
X = R3 \ S 1 ,
X1 = R3 \ {(x, y, z) ∈ R3 : z = 0, x2 + y 2 ≤ 1},
X2 = R3 \ {(x, y, z) ∈ R3 : z = 0, x2 + y 2 < 1},
grazie al teorema 3.29 si conclude che
Π(S 1 ) = Π1 (R3 \ S 1 ) = Π1 (X1 ) ∗ Z = Z.
Un nodo toroidale è un nodo che giace su una superficie torica T espressa parametricamente da
x = (10 + cos ϕ) sin θ
y = (10 + cos ϕ) cos θ
z = sin ϕ
ϕ, θ ∈ R
e siano
C1 = {(x, y, z) ∈ R3 : z = 0, x2 + y 2 = 100},
C2 = {(x, y, z) ∈ R3 : x = 0, (y − 10)2 + z 2 = 100},
Se d è la distanza euclidea di R3 si ponga:
T i = {u ∈ R3 : d(u, C1 ) ≤ 1}
e
T e = {u ∈ R3 : d(u, C1 ) ≥ 1}.
si provi per esercizio che T i ha lo stesso tipo di omotopia di C1 e che T e ha lo stesso
tipo di omotopia di R3 \ C1 . Pertanto (vedi esempio precedente )
Π1 (T i ) = Z
74
Il gruppo fondamentale
e
Π1 (T e ) = Π(C1 ) = Z.
Dati p e q interi primi tra loro sia Cp,q il nodo toroidale espresso parametricamente
da
θ = pt
ϕ = qt 0 ≤ t ≤ 2π
Vogliamo calcolare Π(Cp,q ) = Π1 (R3 \ Cp,q ). A questo scopo definiamo
P : R 3 → C1
come
e siano
(x, y, z) 7→ ( p
10x
x2 + y 2
,p
10y
x2 + y 2
, 0)
X1 = {u ∈ R3 : d(u, C1 ) < 2 e 6 ∃ k ∈ (0, 1] tale che k(u − P (u)) + P (u) ∈ Cp,q }
1
e 6 ∃ k ≥ 1 tale che k(u − P (u)) + P (u) ∈ Cp,q }.
2
Gli insiemi X1 e X2 sono aperti, e si dimostra facilmente (esercizio) che X1 ha lo
stesso tipo di omotopia di T i (e quindi di C1 ) e che X2 ha lo stesso tipo di omotopia di
T e (e quindi di R3 \ C1 ). Inoltre l’intersezione di X1 e X2 ha lo stesso tipo di omotopia
di T \ Cp,q
X1 ∩ X2 =
X2 = {u ∈ R3 : d(u, C1 ) >
= {u ∈ R3 :
1
< d(u, C1 ) < 2 e 6 ∃ k > 0 tale che k(u − P (u)) + P (u) ∈ Cp,q }.
2
Essendo p e q interi primi tra loro, non esiste t ∈ (0, 2π) avente la stessa immagine dei
punti 0 e 2π attrverso la curva Cp,q .
T \ Cp,q risulta connesso per archi ed ha lo stesso tipo di omotopia della curva
esprussa da
θ = pt
lp,q
ϕ = qt + ε 0 ≤ t ≤ 2π
dove ε è un numero positivo abbastanza piccolo. (Esercizio: trovare le equivalenze
omotopiche).
Pertanto Π1 (T \ Cp,q ) = Z, un suo generatore essendo la curva lp,q . Un’applicazione del teorema 3.28 permette di stabilire che
Π(Cp,q ) = Π1 (R3 \ Cp,q ) = Za ∗ Zb /{ap = bq }.
e) Il teorema del punto fisso.
75
Il gruppo fondamentale
Teorema 3.30. Sia f : D 2 → D 2 una funzione continua D 2 = {(x, y) ∈ R2 :
x2 + y 2 ≤ 1}) Allora esiste x0 ∈ D 2 tale che f (x0 ) = x0 .
La dimostrazione fa uso del seguente lemma.
Lemma 3.31. Non esiste alcuna funzione continua g : D 2 → S 1 che sia l’identità su
S1.
Dimostrazione. Supponiamo che una tale funzione g esista. Se i : S 1 → D2 indica la
funzione inclusione, il seguente diagrmma è commutativo: Dai risultati del Cap.I 3.11
e 3.12 si deduce che anche il diagramma è commutativo. Poiché D 2 è contrattile, si
ottiene
g∗ ◦ i∗ (Z) = g∗ (1) = 1 6= Z
che contraddice la commutatività del diagramma.
Dimostrazione (del teorema 3.30). Si supponga, per assurdo, che f non abbia
alcun punto fisso. Dunque x 6= f (x)∀x ∈ D 2 , e (x, f (x)) individuano un’ unica retta
del piano. La funzione g : D 2 → S 1 che associa ad x l’intersezione (dalla parte di
x) della retta per (x, f (x))con il bordo di D 2 , è una funzione continua (esercizio) che
ristretta ad S 1 = ∂D2 è l’identità. Questo contraddice il lemma precedente.
f) Il teorema fondamentale dell’algebra.
Teorema 3.32. Ogni polinomio complesso non costante ha almeno una radice.
Dimostrazione. Per assurdo. Non è restrittivo supporre che il polinomio sia della forma
q(z) = z n +
n−1
X
bi z i .
i=0
Sia Dd = {z ∈ C :| z |≤ d} e ∂Dd = {z ∈ C :| z |= d} ∼ S 1 la sua frontiera. La
funzione continua h : ∂Dd → S 1 definita da
h(z) =
q(z)
.
| q(z) |
si estende ad una funzione continua su tutto Dd e dunque (Cap.I) è omotopa ad una
applicazione costante. L’applicazione costante k : ∂Dd → S 1
k(z) =
zn
.
| zn |
non è omotopa ad una applicazione costante (esercizio). D’altra parte, per d abbastanza
grande, h e k sono omotope, essendo l’omotopia
Pn−1 i
z n + t i=0
bi z
.
H(z, t) =
P
n−1
| z n + t i=0 bi z i |
Contraddizione.
QED
76
Appendice A
Prerequisiti
A.1 Spazi di Hausdorff
Uno spazio topologico X si dice uno spazio di Hausdorff (o T2 ) se, dati due punti
distinti x e y in X, esistono U, V intorni aperti di x, y (rispettivamente) tali che U ∩V =
∅.
◮ Esempio I–1. Lo spazio Rn , con la topologia euclidea, è uno spazio
di Hausdorff. Siano infatti x, y ∈ Rn distinti. Abbiamo d(x, y) = ε > 0
e, scelte U, V come le palle di raggio ε/2 centrate in x, y (rispettivamente),
risulta U ∩ V = ∅: infatti se esistesse uno z ∈ U ∩ V si avrebbe
ε = d(x, y) ≤ d(x, z) + d(z, y) < ε,
il che è impossibile.
◭
Il ragionamento appena visto vale per ogni spazio metrico rispetto alla sua distanza d,
perciò:
Osservazione A.1. Ogni spazio metrico è di Hausdorff.
◮ Esempio I–2. Su R si può definire la topologia della semicontinuità superiore scegliendo come famiglia di aperti
{∅, R} ∪ {(−∞, a) : a ∈ R}.
Lo spazio topologico così definito non è di Hausdorff, poichè due aperti
non vuoti si intersecano sempre.
◭
Proposizione A.2. Dato uno spazio di Hausdorff X, ogni Y ⊆ X è uno spazio di
Hausdorff.
1
Prerequisiti
Esercizio A.3. Dimostrare la proposizione A.2.
Dati due spazi topologici X, Y con famiglie di aperti σ, τ rispettivamente, sul prodotto
cartesiano X × Y possiamo definire la topologia prodotto scegliendo come aperti le
unioni
[
Ui × Vj
i∈I,j∈J
con Ui ∈ σ per ogni i ∈ I e Vj ∈ τ per ogni j ∈ J.
Proposizione A.4. Se X e Y sono spazi di Hausdorff allora X × Y è uno spazio di
Hausdorff.
Esercizio A.5. Dimostrare la proposizione A.4.
Proposizione A.6. Uno spazio topologico X è di Hausdorff se, e solo se, la diagonale
∆X = {(x, x) : x ∈ X} è un chiuso di X × X.
Dimostrazione. Dimostriamo anzitutto che se X è di Hausdorff allora ∆X è aperto,
ovvero il suo complementare C(∆X ) è aperto. Data (x, y) ∈ C(∆X ), abbiamo x 6= y
e dunque esistono U, V intorni aperti disgiunti di x, y in X. Il prodotto U × V è un
intorno aperto di (x, y) in X che non interseca ∆X . Dunque esiste un intorno aperto
U × V di (x, y) in C(∆X ), come desiderato. Viceversa, se ∆X è un chiuso allora X
è di Hausdorff. Dati x, y distinti in X, la coppia (x, y) ammette un intorno aperto in
C(∆X ). Per la definizione di aperti nella topologia prodotto, esiste un intorno aperto di
(x, y) in C(∆X ) della forma U × V con U, V aperti di X. Per costruzione, U ∩ V = ∅.
QED
Dati uno spazio topologico X e una relazione di equivalenza ∼, denotiamo con X/ ∼
il quoziente e con π : X → X/ ∼ la proiezione sul quoziente. Possiamo dotare X/ ∼
della cosiddetta topologia quoziente scegliendo come aperti gli insiemi A ⊆ X/ ∼
dotati di retroimagine π −1 (A) aperta. Il seguente esempio dimostra che, dato uno
spazio di Hausdorff X, non sempre un suo quoziente X/ ∼ è di Hausdorff:
◮ Esempio I–3.
Sia X = [−1, 1]
equivalenza ∼ su X ponendo
x∼1
x ∼ −1
∀y ∈] − 1, 1[,
x∼y
e definiamo una relazione di
⇔ x=1
⇔ x = −1
⇔ |x| = |y|
Chiaramente X è di Hausdorff, in quanto sottospazio di R. Tuttavia X/ ∼
non è di Hausdorff poiché 1 e −1 non ammettono intorni disgiunti (in
questo caso si dice che 1 e −1 non sono separabili).
◭
Tuttavia esiste una condizione necessaria e sufficiente sulla relazione ∼ affinché il
quoziente X/ ∼ sia anch’esso uno spazio di Hausdorff (si veda il teorema 1.3).
2
Prerequisiti
◮ Esempio I–4. Consideriamo il quadrato Q = [0, 1] × [0, 1] e la
relazione di equivalenza definita identificando ogni punto (x, 0) con (x, 1)
ed ogni (0, y) con (1, y). Per la precisione:
∀x, y ∈]0, 1[,
∀x ∈]0, 1[, y ∈ {0, 1},
∀x ∈ {0, 1}, y ∈]0, 1[,
∀x, y ∈ {0, 1},
(x, y) ∼ (z, w)
(x, y) ∼ (z, w)
(x, y) ∼ (z, w)
(x, y) ∼ (z, w)
⇔ x = z, y = w
⇔ x = z, w ∈ {0, 1}
⇔ z ∈ {0, 1}, y = w
⇔ z, w ∈ {0, 1}
Lo spazio quoziente Q/ ∼ risulta uno spazio di Hausdorff poiché l’insieme
F = {((x, y), (z, w)) : π(x, y) = π(z, w)} =
= {((x, y), (z, w)) : (x, y) ∼ (z, w)}
è un chiuso di Q × Q. Infatti
F = ∆Q ∪
4
[
γi ([0, 1]) ∪ I
j=1
dove ∆Q è la diagonale di Q, dove γ1 , ..., γ4 : [0, 1] ∈ Q × Q sono curve
continue definite da
γ1 (t) = ((0, t), (1, t)), γ2 (t) = ((1, t), (0, t)),
γ3 (t) = ((t, 0), (t, 1)), γ4 (t) = ((t, 1), (t, 0))
e dove I è l’insieme finito
I = {((0, 0), (1, 1)), ((1, 1), (0, 0)), ((0, 1), (1, 0)), ((1, 0), (0, 1))}.
Ora, ∆Q è chiuso per la proposizione A.6 (X × X è di Hausdorff poiché
lo è X). Le immagini γi ([0, 1]) sono compatte in X × X e dunque chiuse
per la proposizione seguente.
◭
Proposizione A.7. Se X è uno spazio di Hausdorff ed Y ⊆ X è un suo sottospazio
compatto, allora Y è chiuso in X.
Esercizio A.8. Dimostrare la proposizione A.7.
Proposizione A.9. Siano X uno spazio topologico compatto, Y uno spazio di Hausdorff e f : X → Y una funzione continua. Allora f è chiusa. Se, inoltre, f è biiettiva
allora f è un omeomorfismo.
3
Prerequisiti
Dimostrazione. Dobbiamo anzitutto dimostrare che se C è un chiuso di X allora f (C)
è un chiuso di Y . L’insieme C è compatto, essendo un chiuso di uno spazio compatto. Per la continuità di f , l’immagine f (C) è compatta. La proposizione seguente
ci consente di concludere che f (C) è un chiuso di Y , come desiderato. Supponiamo adesso che f sia biiettiva. Per concludere che f sia un omeomorfismo ci basta
dimostrare che l’inversa g = f −1 : Y → X è anch’essa continua, ossia che per
ogni chiuso C di X la retroimmagine g−1 (C) è continua. Ma ciò segue immediatamente dal fatto che g−1 (C) coincida con f (C), che è chiusa per quanto visto sopra.
QED
A.2
Spazi connessi
Sia X uno spazio topologico. Diciamo che X è sconnesso se esistono due aperti
A, B ⊂ X, non vuoti e disgiunti, tali che A ∪ B = X; una tale coppia A, B si dice una
sconnessione di X. Diciamo X connesso se non ammette alcuna sconnessione.
◮ Esempio I–5. R e tutti gli intervalli reali sono connessi.
◭
Si noti come nella definizione sia possibile sostituire “aperti” con “chiusi”. Inoltre
dalla stessa definizione deriva immediatamente che X è sconnesso se e solo se esiste
un sottoinsieme proprio A ⊂ X, non vuoto, che sia aperto e chiuso in X.
Proposizione A.10. Siano X, Y spazi topologici e sia f : X → Y una funzione
continua. Se X è connesso allora la sua immagine f (X) è connessa.
Esercizio A.11. Dimostrare la proposizione A.10.
Dato uno spazio topologico X, ciascun sottoinsieme connesso massimale si dice una
componente connessa di X.
Proposizione A.12. Le componenti connesse di uno spazio topologico X sono chiusi
di X.
Esercizio A.13. Dimostrare la proposizione A.12.
Il seguente esempio dimostra che le componenti connesse non sono, in generale, aperte.
◮ Esempio I–6. Consideriamo l’insieme Q dei numeri razionali,
con la topologia indotta dalla topologia euclidea di R. Le componenti
connesse di Q sono i singoletti {q} con q ∈ Q, che non sono aperti di Q.
◭
Nell’esempio precedente, le componenti connesse non sono aperte a causa di un “difetto” locale. Definiamo infatti uno spazio topologico localmente connesso se ogni punto
ha un sistema fondamentale di intorni connessi. Vale allora la proprietà seguente.
4
Prerequisiti
Proposizione A.14. Sia X uno spazio topologico localmente connesso. Allora le
componenti connesse di X sono aperte e chiuse.
Esercizio A.15. Dimostrare la proposizione A.14.
Concludiamo con un esempio di spazio topologico connesso ma non localmente connesso.
◮ Esempio I–7. Sia f : [0, 1] → R la funzione definita da
0
se x = 0
f (x) =
sin(1/x) altrimenti
e sia X il grafico di f , con la topologia indotta da R2 . Lo spazio X non è
localmente connesso, poiché il punto (0, 0) non ammette un sistema fondamentale di intorni connessi. Ciò si deriva facilmente dall’osservazione
che, per ogni ε > 0 sufficientemente piccolo, detto D il disco centrato
in (0, 0) e di raggio ε, l’intersezione D ∩ X è sconnessa. D’altra parte
X è connesso. Infatti, posto G = {(x, sin(1/x)) : x > 0}, si ottiene
che G è connesso come conseguenza della proposizione A.10. Poiché
X = {(0, 0)} ∪ G con (0, 0) aderente a G, si ottiene che G ⊂ X ⊂ G e
si conclude che X è connesso grazie alla proposizione seguente.
◭
Proposizione A.16. Sia X uno spazio topologico e sia Y ⊆ X un sottospazio connesso. Allora ogni Z tale che Y ⊆ Z ⊆ Y è connesso.
Esercizio A.17. Dimostrare la proposizione A.16 utilizzando la proposizione A.12.
5
Bibliografia
[1] C HECCUCCI V., T OGNOLI A., V ESENTINI E., Lezioni di Topologia Generale,
Feltrinelli, Milano, 1977.
[2] G UGLIELMI M.L., Tesi di Laurea, Firenze, 1997.
[3] M ASSEY W.S., Algebraic Topology: an Introduction, Harcourt, Brace & World,
New York, 1967.
[4] R ADÒ T., Über den Begriff der Riemannschen Fläche, Acta Litt.Sci. Szeged., 2,
(1925), pp. 101-121.
[5] S EIFERT H., T HRELFALL W., A Textbook of Topology, New York, Academic
Press, 1980.
6
Indice
1 Classificazione superfici compatte
1.1 Alcuni risultati topologici . . . . . . . . . . .
1.2 L’operazione di taglia e incolla . . . . . . . .
1.3 Superficie: definizioni e primi esempi . . . .
1.4 Sviluppo piano e somma connessa di superfici
1.5 La classificazione delle superfici compatte . .
1.6 Esercizi di riepilogo . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
. 1
. 3
. 6
. 12
. 31
. 38
2 Omotopia di applicazioni e di spazi
40
2.1 Spazi connessi per archi . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.2 Omotopia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3 Il gruppo fondamentale
3.1 Omotopia di cammini . . . . . . . . . .
3.2 Il gruppo fondamentale . . . . . . . . .
3.3 Prodotti liberi di gruppi e loro quozienti
3.4 Il teorema di Van Kampen . . . . . . .
3.5 Esempi ed applicazioni . . . . . . . . .
.
.
.
.
.
56
56
60
65
68
72
A Prerequisiti
A.1 Spazi di Hausdorff . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Spazi connessi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1
4
7
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
INDICE
8