Didattica della geometria?
Il programma di Klein
Bourbaki e l’algebra lineare
I fondamenti di Hilbert
Poincaré e la topologia
La geometria differenziale
Le geometrie non-euclidee
Gli Elementi di Euclide
La geometria dei numeri
Il metodo delle coordinate
Trasformazioni e invarianti
La misura dello spazio
Parametri e dimensioni
Autosimilarità e frattali
La scuola di Atene
Gli Elementi di Euclide (~ 300 a.c.)
1. Definizioni, postulati, nozioni comuni
2. L’algebra geometrica e le proporzioni
3. La circonferenza
4. Poligoni inscritti e circoscritti
5. Grandezze proporzionali
6. Figure simili
7. Numeri primi e divisibilità
8. Le proporzioni continue
9. La teoria dei numeri
10. Grandezze incommensurabili
11. Geometria solida
12. Aree e volumi
13. Poliedri regolari
Gli Elementi di Euclide
Definizioni
1. Punto è ciò che non ha parti.
2. Linea è ciò che ha lunghezza senza larghezza.
3. Estremi di una linea sono punti.
4. Retta è una linea che giace ugualmente rispetto ai punti su di essa.
5. Superficie è ciò che ha solo lunghezza e larghezza.
6. Estremi di una superficie sono linee.
7. Piano è una superficie che giace ugualmente rispetto alle rette su di essa.
8. Angolo piano è l’inclinazione reciproca di due linee in un piano che si incontrino
e non giacciano in una retta.
9. Quando le linee che comprendono l’angolo sono rette, l’angolo si chiama rettilineo.
10. Quando una retta innalzata a partire da un’altra retta forma con essa angoli adiacenti
uguali, ciascuno di questi è retto, e la retta si chiama perpendicolare a quella su cui si
è innalzata.
11. Ottuso è un angolo maggiore di un angolo retto.
12. Acuto è un angolo minore di un angolo retto.
13. Termine è ciò che è estremo di qualche cosa.
14. Figura è ciò che è compreso da uno o più termini.
Gli Elementi di Euclide
15. Cerchio è una figura piana compresa da un’unica linea (che si chiama circoferenza) tale che
tutte le rette che terminano su di essa a partire da un medesimo punto fra quelli interni alla
figura siano uguali fra loro.
16. Quel punto si chiama centro del cerchio.
17. Diametro del cerchio è una retta condotta per il centro e terminata da entrambe le parti
dalla circonferenza del cerchio, la quale retta taglia anche il cerchio a metà.
18. Semicerchio è la figura compresa da un diametro e dalla circonferenza da esso tagliata,
e centro del semicerchio è lo stesso punto che è anche centro del cerchio.
19. Figure rettilinee sono quelle comprese da rette: figure trilatere quelle comprese da tre
rette, quadrilatere comprese da quattro rette e multilatere quelle comprese da più di
quattro rette.
20. Delle figure trilatere, si chiama triangolo equilatero una che ha i tre lati uguali, triangolo
isoscele una che ha due lati uguali, triangolo scaleno una che ha i tre lati disuguali.
21. Inoltre, si chiama triangolo rettangolo una figura trilatera che ha un angolo retto, triangolo
ottusangolo una che ha un angolo ottuso e triangolo acutangolo una che ha i tre angoli acuti.
22. Delle figure quadrilatere, si chiama quadrato una che ha i lati uguali e gli angoli retti,
rettangolo una che ha gli angoli retti ma i lati diseguali, rombo una che ha i lati uguali ma
gli angoli non retti, romboide una che ha lati e angoli opposti uguali ma non è un
rettangolo o un rombo. Ogni altra figura quadrilatera si chiama trapezio.
23. Parallele sono due rette giacenti in uno stesso piano che, prolungate illimitatamente in
entrambe le direzioni, non si incontrino fra loro da nessuna delle due parti.
Gli Elementi di Euclide
Postulati
1. È possibile condurre una linea retta daPostulati
un qualsiasi punto ad ogni altro punto.
2.
1.
3.
2.
4.
3.
5.
4.
È possibile prolungare illimitatamente una retta finita in linea retta.
È possibile condurre una linea retta da un qualsiasi punto ad ogni altro punto.
È possibile tracciare un cerchio con qualsiasi centro e distanza (raggio) qualsiasi.
È possibile prolungare illimitatamente una retta finita in linea retta.
Tutti gli angoli retti sono uguali fra loro.
È possibile tracciare un cerchio con qualsiasi centro e distanza (raggio) qualsiasi.
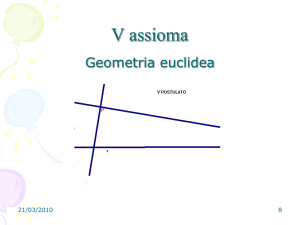
Se, in un piano, una retta, intersecando due altre rette, forma con esse, da una medesima
Tutti gli angoli retti sono uguali fra loro.
parte, angoli interni la cui somma è minore di due angoli retti, allora queste due rette, se
5. Se,
in un piano, una
retta, intersecando
due
altre rette,dalla
formaparte
con esse,
indefinitamente
prolungate,
finiscono con
l’incontrarsi
detta.da una medesima
parte, angoli interni la cui somma è minore di due angoli retti, allora queste due rette, se
indefinitamente prolungate, finiscono con l’incontrarsi dalla parte detta.
Nozioni comuni
1. Cose uguali a un’altra sono uguali tra
loro. comuni
Nozioni
2.
1.
3.
2.
4.
3.
5.
4.
Se a cose uguali si aggiungono cose uguali, allora si ottengono cose uguali.
Cose uguali a un’altra sono uguali tra loro.
Se a cose uguali si tolgono cose uguali, allora si ottengono cose uguali.
Se a cose uguali si aggiungono cose uguali, allora si ottengono cose uguali.
Cose che possono essere portate a sovrapporsi l’una con l’altra sono uguali tra loro.
Se a cose uguali si tolgono cose uguali, allora si ottengono cose uguali.
Il tutto è maggiore della parte.
Cose che possono essere portate a sovrapporsi l’una con l’altra sono uguali tra loro.
5. Il tutto è maggiore della parte.
I fondamenti di Hilbert (1899)
1. I cinque gruppi di assiomi
2. Compatibilità e indipendenza
3. La teoria delle proporzioni
4. Le teoria delle aree piane
5. Il teorema di Desargues
6. Il teorema di Pascal
7. Costruzioni geometriche
III Problema di Hilbert
Due poliedri aventi lo stesso
volume sono equiscomponibili?
L’invariante di Dehn
Due poliedri sono equiscomponibili se e solo se hanno
lo stesso volume e lo stesso invariante di Dehn
!
D(P ) =
!(Si) ⊗ δ(Si) ∈ R ⊗Z R/πZ
Z
i
I fondamenti di Hilbert
Concetti primitivi
Oggetti: punto, retta, piano.
Concetti primitivi
Relazioni:
appartenenza,
ordinamento (stare “tra’’), parallelismo, congruenza, continuità.
Oggetti: punto,
retta, piano.
Relazioni: appartenenza, ordinamento (stare “tra’’), parallelismo, congruenza, continuità.
Assiomi di appartenenza
Assiomi
appartenenza
1. Dati due punti distinti P e Q, esiste
unadiretta
r = P Q tale che P e Q appartengono ad r.
2.
1.
3.
2.
3.
4.
4.
5.
6.
5.
6.
7.
7.
8.
Tali
P e Qdistinti
determinano
univocamente
r. tale che P e Q appartengono ad r.
Datipunti
due punti
P e Q, esiste
una rettalar retta
= PQ
Ad
retta
almeno
due punti
ad ogni
Taliogni
punti
P eappartengono
Q determinano
univocamente
laeretta
r. piano appartengono almeno tre
punti non allineati (cioè non appartenenti ad una stessa retta).
Ad ogni retta appartengono almeno due punti e ad ogni piano appartengono almeno tre
Dati
punti
non allineati
P appartenenti
, Q e R, esisteadununa
piano
P QR tale che P , Q e R
puntitre
non
allineati
(cioè non
stessa=retta).
appartengono ad .
Dati tre punti non allineati P , Q e R, esiste un piano = P QR tale che P , Q e R
Tali
punti P , Qad
e R .determinano univocamente il piano .
appartengono
Se
punti
P ee R
Q determinano
di una retta runivocamente
appartengonoilad
un piano
, allora tutti i punti di r
Talidue
punti
P, Q
piano
.
appartengono ad (cioè la retta r è contenuta nel piano ).
Se due punti P e Q di una retta r appartengono ad un piano , allora tutti i punti di r
Se
due piani ad
e ⇥ contengono
P , allora
un altro punto Q
appartengono
(cioè la rettaunr punto
è contenuta
nelesiste
piano almeno
).
appartenente ad e ⇥.
Se due piani e ⇥ contengono un punto P , allora esiste almeno un altro punto Q
Esistono
almeno
appartenente
ad quattro
e ⇥. punti non complanari (cioè non appartenenti ad uno stesso piano).
8. Esistono almeno quattro punti non complanari (cioè non appartenenti ad uno stesso piano).
I fondamenti di Hilbert
Assiomi di ordinamento
9. Se un punto Q sta tra i punti P e R, allora Q sta anche tra R e P ; in tal caso i punti P , Q e
R sono allineati.
10. Dati due punti distinti P e R, esistono almeno un punto Q tra P e R e un punto S tale che
R sta tra P e S.
11. Dati tre punti, ce n’è al più uno che sta tra gli altri due.
12. Quattro punti distinti e allineati P , Q, R e S possono essere permutati in modo che Q stia
tra P e R e tra P e S, e R stia tra P e S e tra Q e S.
13. Assioma di Pasch. Siano P , Q e R tre punti non allineati e sia r una retta contenuta nel
piano P QR e non contenente nessuno di questi punti; se r contiene un punto tra P e Q,
allora contiene anche un punto tra P e R o tra Q e R.
... orientazioni su rette e piani,
semirette e segmenti,
semipiani e angoli,
poligoni
I fondamenti di Hilbert
Assiomi di congruenza
14. Dati due punti distinti P e Q, per ogni retta r e ogni punto P di r esiste un (unico) punto
Q di r in ciascuna delle due semirette di r uscenti da P , tale che i segmenti P Q e P Q
(intesi come coppie di punti) sono congruenti.
15. La relazione di congruenza tra segmenti è transitiva.
16. Dati tre punti P , Q e R tali che Q sta tra P e R e tre punti P , Q e R tali che Q sta tra P e
R , se i segmenti P Q e P Q sono congruenti e i segmenti QR e Q R sono congruenti,
allora i segmenti P R e P R sono congruenti.
17. Dato un angolo P OQ (inteso come coppia di semirette OP e OQ uscenti da O), per ogni
piano e ogni semiretta O P in , esistono esattamente due semirette O Q e O Q
uscenti da O in , tali che gli angoli P OQ, P O Q e P O Q sono congruenti.
18. La relazione di congruenza tra angoli è transitiva.
19. Se due triangoli P QR e P Q R (intesi come triple di punti) hanno congruenti tra loro i lati
P Q e P Q , i lati QR e Q R (tutti intesi come segmenti) e gli angoli P QR e P Q R , allora
hanno congruenti tra loro anche i lati P R e P R , gli angoli QRP e Q R P e gli angoli
RP Q e R P Q .
... misura dei segmenti e degli angoli t.c. congruenza = stessa misura
movimenti rigidi = trasformazioni che conservano le misure
I fondamenti di Hilbert
Assioma delle parallele
20. Dati una retta r e un punto P non appartenente a r, esiste un’unica retta s tale che P
appartiene a s e inoltre s è complanare con r ma nessun punto di r appartiene a s (s è la
parallela a r passante per P ).
20.
21.
22.
21.
Assioma delle parallele
Assiomi di continuità
...
equipollenza
tra segmenti
Dati una retta r e un punto P non appartenente
a r, esisteorientati,
un’unica retta s tale che P
Assioma
di
Archimede.
Se
P
e
P
sono
punti
distinti
su
una
retta
e Q è un qualunque
0
1
appartiene a s e inoltre s è complanare
con r ma
nessun punto
di rr appartiene
a s (s è la
i
vettori
liberi
punto
di
r
tale
che
P
sta
tra
P
e
Q,
allora
esistono
dei
punti
P
,
.
.
.
,
P
su
r
tali
che Pi
1 per P ). 0
2
n
parallela a r passante
sta tra Pi 1 e Pi+1 per ogni i = 1, . . . , n 1,
i segmenti Pi 1 Pi con i = 1, . . . , n sono tutti congruenti tra loro, e Q sta tra P0 e Pn .
Assiomi di continuità
Assioma di completezza lineare. Aggiungendo un punto a una retta, si ottiene un oggetto
che
non soddisfa
più tutti
3 (ad
ogni
retta appartengono
punti),
Assioma
di Archimede.
Se gli
P0 assiomi
e P1 sono
punti
distinti
su una retta r ealmeno
Q è undue
qualunque
9-12, 14-16
e 21.che P1 sta tra P0 e Q, allora esistono P2 , . . . , Pn punti su r tali che Pi sta
punto
di r tale
tra Pi 1 e Pi+1 per ogni i = 1, . . . , n 1, i segmenti Pi 1 Pi con i = 1, . . . , n sono tutti
congruenti tra loro, e Q sta tra P0 e Pn .
22. Assioma di completezza lineare. Aggiungendo un punto a una retta, si ottiene un oggetto
che non soddisfa più tutti gli assiomi 3 (ad ogni retta appartengono almeno due punti),
9-12, 14-16 e 21.
... la retta e i numeri reali
Il modello “reale”
Teoria degli insiemi
Piano euclideo
Punti del piano:
Rette del piano:
Misura segmenti:
ry
y Py
P
(x, y) ∈
Uy
O
Ux
Px
x
rx
2
Dall’algebra dei segmenti ...
... alla geometria dei vettori
Teorema di Desargues
Teorema di Pappo-Pascal
Peano - I principi di geometria
logicamente esposti (1889)
Weyl - Spazio-tempo-materia (1918)
La geometria dei vettori
Nozioni preliminari
Campo ordinato dei numeri reali R = (R, + , · , ⇥ ), definito come completamento del campo
ordinato dei numeri razionali Q = (Q, + , · , ⇥ ), caratterizzato dalle seguenti proprietà:
1. (R, + ) è un gruppo commutativo (con elemento neutro 0).
2. (R
{0}, · ) è un gruppo commutativo (con elemento neutro 1).
3. a · (b + c) = (a · b) + (a · c) per ogni a, b, c ⇧ R.
4. ⇥ è una relazione d’ordine totale su R.
5. a ⇥ b ⌅ a + c ⇥ b + c, per ogni a, b, c ⇧ R.
6. 0 ⇥ a e 0 ⇥ b ⌅ 0 ⇥ a · b, per ogni a, b ⇧ R.
7. Proprietà di archimede. Per ogni a ⇧ R esiste un numero naturale n tale che n ⇥ a ⇥ n.
8. Completezza. Dati due insiemi A, B ⇤ R con a ⇥ b per ogni a ⇧ A e b ⇧ B, esiste c ⇧ R tale
che a ⇥ c ⇥ b per ogni a ⇧ A e b ⇧ B (il numero c è detto elemento separatore tra A e B).
... la struttura della retta codificata
negli assiomi per il campo dei numeri reali
La geometria dei vettori
Spazio vettoriale reale, definito come insieme V (di vettori) con una somma vettoriale v + w ⌃ V
e un prodotto per scalari a v ⌃ V per ogni a ⌃ R e v, w ⌃ V , tali che:
1. (V, + ) è un gruppo commutativo (con elemento neutro 0V ).
2. a (v + w) = a v + a w per ogni a ⌃ R e v, w ⌃ V .
3. (a + b) v = a v + b v per ogni a, b ⌃ R e v ⌃ V .
4. (a · b) v = a (b v) per ogni a, b ⌃ R e v ⌃ V .
5. 1 v = v per ogni v ⌃ V .
La dimensione dim V è il minimo numero di vettori che genera V ( = cardinalità di ogni base).
W ⌅ V si dice sottospazio vettoriale, se è uno spazio vettoriale con le operazioni indotte da V .
In tal caso dim W ⇤ dim V e vale l’uguaglianza solo se W = V .
Spazio vettoriale euclideo, definito come coppia (V, ⌥· , · ), con V spazio vettoriale reale
e ⌥· , · prodotto scalare su V , cioè un’applicazione ⌥· , · : V ⇥ V ⇧ R tale che:
1. ⌥v, w = ⌥w, v per ogni v, w ⌃ V .
2. ⌥u + v, w = ⌥u, w + ⌥v, w per ogni u, v, w ⌃ V .
3. ⌥a v, w = a · ⌥v, w per ogni a ⌃ R e v, w ⌃ V .
4. ⌥v, v > 0 per ogni v ⌃ V {0V }.
Per ogni v ⌃ V di chiama norma (o modulo) di v il numero reale non negativo v =
⌥v, v .
... e quella dello spazio nell’algebra degli spazi vettoriali
La geometria dei vettori
Spazi affini reali
Dato un spazio vettoriale reale V , uno spazio affine su V è un insieme non vuoto A (i cui
elementi si chiamano punti) con un’applicazione A A ⌅ V che associa ad ogni coppia di
bbbbbbd
punti P, Q ⌃ A il vettore P Q ⌃ V , in modo che siano soddisfatte le seguenti proprietà:
bbbbbbd
1. Per ogni punto P ⌃ A e ogni vettore v ⌃ V esiste un unico punto Q ⌃ A tale che P Q = v.
bbbbbbd bbbbbbd bbbbbbd
2. Identità di Charles. P Q + QR = P R per ogni P, Q, R ⌃ A.
La dimensione di A è per definizione la dimensione di V . Chiamiamo retta affine uno spazio
affine di dimensione 1 e piano affine uno spazio affine di dimensione 2.
Per ogni punto P ⌃ A e ogni sottospazio vettoriale W ⇤ V , il sottospazio affine passante
bbbbbbd
per P e parallelo a W è l’insieme L = {Q ⌃ A | P Q ⌃ W } (che è uno spazio affine su W ).
Spazi euclidei
Uno spazio euclideo E di dimensione n è uno spazio affine di dimensione n su uno spazio
vettoriale euclideo V . In particolare, una retta euclidea è uno spazio vettoriale euclideo di
dimensione 1 e un piano euclideo è uno spazio euclideo di dimensione 2.
Dati due punti P, Q ⌃ E si definisce distanza euclidea tra P e Q il numero reale non negativo
bbbbbbd
d(P, Q) = ⌥P Q⌥. La funzione distanza d : E E ⌅ [0, ⇧) soddisfa le seguenti proprietà:
1. d(P, Q) = 0 se e solo se P = Q.
2. Proprietà simmetrica. d(P, Q) = d(Q, P ) per ogni P, Q ⌃ E.
3. Proprietà triangolare. d(P, Q) ⇥ d(P, R) + d(R, Q) per ogni P, Q, R ⌃ E.
Bourbaki e l’algebra lineare
A bas Euclide!
Mort aux triangles!
Dieudonne: L’algebra lineare permette di presentare la geometria elementare
in modo del tutto rigoroso e senza sforzo, mentre è noto che gli assiomi proposti
fin dalla fine del secolo scorso, nel solco della tradizione euclidea, sono talmente
complessi e sottili da non poterli trattare prima della laurea. Da qui la necessità,
penosa per un matematico, di presentare ai propri allievi solo pseudo argomenti
che non resistono a una seppur superficiale critica.
Weyl: L'angelo della topologia e il diavolo dell'algebra astratta
si disputano l'anima di ogni disciplina della matematica.
Il problema delle parallele
due equazioni
equivalenti
al V postulato
Il problema delle parallele
A
D
C
D
C
B
Hypothesis Danguli obtusi est obsolute
falsa;
C
B
quiaA se ispam destruit.
D
C
A
B
A
B
Hypothesis anguli acuti est absolute falsa;
quia repugnans naturae lineae rectae.
Il problema delle parallele
Gauss - Teorema egregium (curvatura e geodetiche)
Nessuna mappa della sfera sul piano è perfetta
(conserva tutte le distanze, gli angoli, le aree)
geodetica
lossodromica
Riemann - Sulle ipotesi che stanno alla base della geometria (1854)
Geometria sferica
Dall’astronomia ...
... alla prospettiva
Geometria sferica
Geometria proiettiva
Piano proiettivo
come completamento di quello euclideo con i punti all’infinito
... e come quoziente della sfera con i punti opposti identificati
r
R
P
S
r∞
α
s
α∞
s∞
Due rette distinte si incontrano sempre in un punto
Non ci sono parallele, né similitudini
Geometria proiettiva
Trasformazioni proiettive e grafica 3D
d
1 0
d
0
0 1
0
1
0 0
1
0 0 − d+p
p
0
p
p
x
x
p
− d+p
z
x
d+p
y
−
0y
y
z
=
=
d+p
dz
− z (z + d)
z+d
1
0
z
1
1
− d+p
Geometria iperbolica
Lobacevskij - Nuovi principi della geometria con una
teoria completa delle parallele (1829-1836)
Superfici, linee e punti della geometria esistono solo nella nostra
mente, ma misuriamo quelli reali usando dei corpi. È allora bene
parlarne nel senso in cui sono intesi nelle misure, attenendoci alla
rappresentazione dei corpi, a cui siamo avvezzi e che possiamo
controllare senza anteporvi concetti artificiali ed estranei.
Gauss: materialmente non ho trovato nulla di nuovo nell'opera di Lobacevskij,
ma lo sviluppo è fatto per una via diversa da quella che ho seguito io.
Bolyai - Appendice che espone in maniera assoluta
la vera scienza dello spazio (1832)
Gauss: lodare questo lavoro sarebbe come lodare me stesso.
Infatti esso coincide quasi esattamente con le meditazioni che
ho fatto trenta, trentacinque anni fa.
Geometria iperbolica
Disco di Klein
Disco di Poincaré
La linea più breve tra due punti del piano ... non è sempre rettilinea
Geometria iperbolica
γ
β
α
Escher - Angeli e demoni
Non ci sono similitudini
Geometria iperbolica
Hilbert: il piano iperbolico non
si può realizzare interamente come
una superficie nello spazio euclideo
Il programma di Klein (1882)
Due configurazioni C e C in uno spazio geometrico S
si considerano equivalenti in una certa geometria G
se nel gruppo di trasformazioni T che caratterizza G
esiste una trasformazione t : S
S tale che C = t(C).
Geometria
affine
simile
euclidea
sferica
proiettiva
iperbolica
Spazio
Gruppo
Il programma di Klein
Iso
Tra
–
–
Num. parametri
Triangoli
Rettangoli
Parallelogrammi
Trapezi
Quadrilateri
Ellissi
Parabole
Iperboli
–
+
3
2
3
4
5
2
1
2
2
1
2
3
4
1
0
1
Sim
Aff
Dil
+
0
+
0
0
1
2
0
0
0
0
0
Pro