1
Il pendolo di Maxwell studiato con la tecnica MBL
Barbara Pecori, Dipartimento di Fisica, Università di Bologna
Giacomo Torzo, Dipartimento di Fisica, Università di Padova
Lo studio sperimentale del moto del pendolo di Maxwell, spesso effettuato in modo
riduttivo al solo scopo di misurare il momento di inerzia di un disco, può invece essere
utilizzato come ricco banco di prova sia per consolidare le conoscenze di meccanica
degli allievi sia per sottolineare il ruolo dei modelli nella costruzione di conoscenza in
fisica.
Il moto del pendolo infatti si presta ad una descrizione abbastanza semplice tanto in
termini di momenti delle forze agenti quanto in termini di conservazione dell’energia.
La capacità di diversi modelli fisici di descrivere (o predire) il comportamento del
sistema può essere controllata mediante l’analisi dei dati sperimentali che si ottengono
collegando il pendolo di Maxwell ad un PC tramite una interfaccia seriale e due sensori
(di forza e di spostamento). Si può infatti partire da un modello semplice in grado di
spiegare qualitativamente il moto del pendolo, per poi arrivare ad una descrizione via
via più raffinata ottenuta cercando di minimizzare, per le variabili caratteristiche del
fenomeno, lo scarto tra i valori previsti dal modello teorico e i valori misurati
sperimentalmente.
L’alta frequenza di acquisizione caratteristica del sistema utilizzato e la versatilità del
SW di elaborazione dei dati permettono poi di studiare non solo il moto di caduta e
risalita del pendolo ma anche la fase di “urto” con la fine del filo, controllando
sperimentalmente l’uguaglianza tra l’impulso della forza applicata dal filo al pendolo e
la variazione della quantità di moto di quest’ultimo.
2
1.
Cos’è il pendolo di Maxwell ?
Il “pendolo” di Maxwell ha poco a che fare con il tradizionale pendolo: per definirlo
con una parola sola potremmo dire che esso è uno yo-yo1.
Una definizione più precisa può essere “un solido a simmetria cilindrica costituito da
un disco di raggio R e da un asse di raggio r <<R attorno al quale si avvolgono due fili
di uguale lunghezza. Entrambi i fili hanno uno dei capi bloccato ad una estremità
dell’asse mentre l’altro si aggancia ad un sostegno fisso, cosicchè in condizioni di
equilibrio stabile il corpo resta appeso con il proprio asse disposto orizzontalmente”
(Figura 1).
r
R
α
Pendolo di Maxwell
YO-YO
Figura 1
Come nel caso dello yo-yo, se il pendolo di Maxwell viene lasciato libero dopo aver
avvolto i due fili per un tratto attorno all’asse, esso comincia a ruotare e a scendere
fino a che i fili si sono completamente svolti e a quel punto esso comincia a risalire
tornando quasi all’altezza iniziale, compiendo in tal modo un moto quasi periodico2 di
salita e discesa.
Una osservazione attenta del moto può rivelarci che la dinamica di questo sistema ha
poco in comune con quella del pendolo: semmai ha qualche analogia con il moto di una
palla elastica che rimbalza su un pavimento rigido.
2.
Perchè il pendolo “cade” così lentamente ?.
L’aspetto del moto che a prima vista colpisce di più è che l’accelerazione della
“caduta” è molto ridotta rispetto a quella che avrebbe un oggetto in caduta libera. Per
studiare questo sistema cominciamo quindi con il formulare un modello da cui derivare
una previsione teorica della accelerazione. La caratteristica saliente di questo sistema
1
Giocattolo di origine indonesiana (Filippine) costituito da due dischi uguali, di solito
in legno, connessi rigidamente da un asse attorno al quale è avvolto un filo; una
estremità del filo è bloccata sull’asse e l’altra è tenuta in mano dal giocatore (Webster’s
New World Dictionary).
2 Il moto sarebbe periodico solo se non ci fosse dissipazione e quindi l’altezza cui il
pendolo si trova alla fine della risalita fosse uguale a quella da cui è cominciata la
discesa.
3
(se confrontato con il solido in caduta libera) è la rotazione necessariamente prodotta
dalla presenza del filo: lo yo-yo , per scendere, deve ruotare, e quando è a “fine corsa”
se continua a ruotare deve salire.
Per stabilire una relazione quantitativa tra rotazione attorno all’asse e traslazione lungo
la verticale definiamo innanzitutto un sistema di riferimento per individuare la
posizione x del baricentro, ad esempio un asse verticale diretto verso l’alto con origine
nella posizione di equilibrio stabile. In questo modo, se L è la lunghezza di ciascun filo,
la coordinata del punto di sospensione è xo=L. Se quindi facciamo ruotare il disco, a
partire dalla posizione di equilibrio, la distanza dal punto di sospensione xo–x(t)
diminuisce (dato che i due fili si avvolgono sull’asse) e possiamo dire che tra l’angolo
di rotazione α(t) e lo spostamento verticale x(t) vale la relazione :
x(t)=rα(t).
[1]
Un modo per spiegare perchè l’accelerazione a di questo sistema deve essere minore
della accelerazione di gravità g, può essere derivato dal principio di conservazione della
energia. Se il disco viene lasciato libero, con i due fili ugualmente avvolti sull’asse, a
partire da una altezza x1<xo, il lavoro compiuto dalla forza peso (pari alla diminuzione
dell’energia potenziale ∆U=mg∆x) va ad aumentare non solo l’energia cinetica
traslazionale Et=mv2/2, ma anche l’energia cinetica rotazionale Er=Iω2/2,(m è la massa
del pendolo di Maxwell e I il suo momento di inerzia rispetto all’asse di simmetria). La
velocità v =dx/dt di traslazione verticale è infatti legata alla velocità angolare dalla
relazione v=ωr, che si ottiene derivando la [1] rispetto al tempo.
Quindi per pari percorso di caduta ∆x (e quindi pari diminuzione di energia potenziale
∆U) l’energia cinetica traslazionale del pendolo di Maxwell deve essere minore di
quella di un corpo in caduta libera e di conseguenza minore dev’essere la sua velocità e
la sua accelerazione.
Il perchè sia a < g è quindi facilmente intuibile, ma quanto vale esattamente a ? e si
tratta di una accelerazione costante come per la caduta libera?
La risposta può essere ricavata (nella approssimazione che assume trascurabili gli
attriti e quindi la dissipazione di energia) per due strade: o utilizzando la
conservazione dell’energia totale o studiando la dinamica del sistema che permette di
calcolare la variazione del momento della quantità di moto rispetto all’asse di
simmetria del pendolo.
3.
La conservazione dell’energia
La conservazione dell’energia ci dice che l’energia totale U+Et+Er resta costante
durante la discesa, e quindi, posto U=mgx, Et=mv2(x)/2, Er=Iω2(x)/2,
m
I
mk 2
1 + 2 v2 =
v
[2]
2
mr
2
ove v(x) è la velocità traslazionale del pendolo per ogni valore della distanza x percorsa
a partire dalla situazione in cui il pendolo è fermo.
L’equazione [2] mostra che il sistema si comporta come se la massa inerziale fosse
m(1+I/mr2) = m k, e, risolta rispetto alla velocità, fornisce una relazione analoga a
quella per la velocità terminale di un corpo in caduta libera:
mgx = mv 2 / 2 + Iω 2 / 2 =
v( x ) =
2g x
= 2( g / k ) x = 2 a x
1 + I / ( mr 2 )
[3]
4
Il coefficiente k =1+I/mr2 è il fattore di riduzione della accelerazione a rispetto al caso
di caduta libera, e il coefficiente I/mr2 =(k–1) è pari al rapporto Er/Et tra energia
cinetica rotazionale e traslazionale.
All’ultima eguaglianza nella relazione [3] s può giungere o per similitudine con la
trattazione del moto dei gravi, o tramite la definizione di accelerazione come derivata
temporale della velocità:
a=
4.
dv( x ) dv( x ) dx 1
g
2g
=
=
( x ) ±1 / 2 v( x ) =
= g/k
2
dt
dx dt 2 1 + I / ( mr )
1 + I / ( mr 2 )
[4]
La variazione del momento della quantità di moto.
Allo stesso risultato si arriva usando l’equazione che uguaglia il momento delle forze
esterne T alla derivata del momento angolare L :
dL
T=
[5]
dt
Se calcoliamo il momento angolare rispetto all’asse di simmetria, dobbiamo tener conto
solo della tensione τ dei fili3, dato che possiamo pensare la forza peso applicata al
baricentro (Figura 2) e quindi con momento risultante nullo rispetto all’asse.
In definitiva il momento totale delle forze agenti, che produce la rotazione è : T=τ r.
τ
ω
mg
Figura 2
Il momento angolare è L=Iω,e la sua derivata vale dL/dt =Idω/dt=I(a/r). Quindi la
relazione[5] può essere riscritta:
τ r = (I/r) a
[6]
D’altra parte, applicando la seconda legge di Newton per la forza risultante mg–τ
agente sul sistema, otteniamo una seconda relazione che lega tensione e accelerazione:
mg–τ =ma
[7]
Ovviamente ciascuno dei due fili è soggetto a τ/2, ma come si è già notato tutto
avviene come se avessimo un solo filo verticale teso lungo la verticale passante per il
baricentro (cme nel caso dello Yo-Yo). I due momenti torcenti perpendicolari al piano
verticale contenente l’asse di simmetria nel pendolo di Maxwell sono uguali ed opposti
ed hanno quindi risultante nulla.
3
5
Eliminando dalle due relazioni [6] e [7] l’incognita τ otteniamo di nuovo il risultato
fornito dalla relazione [4]
[8]
a = g [m / (I/r2 +m)]=g/k
Il fattore k=1+ I/mr2, di cui viene ridotta la accelerazione del pendolo di Maxwell,
rispetto a quella di un corpo che cade soggetto solo alla forza peso, può essere molto
maggiore dell’unità.
Infatti, se in una prima approssimazione (che vedremo essere valida per r<<R)
trascuriamo il momento di inerzia dell’asse del pendolo rispetto a quello del disco,
possiamo stimare I≈mR2/2, ovvero
k≈1+(1/2)(R/r)2
[9]
Se vogliamo che il nostro yo-yo scenda molto lentamente (k>>1) dobbiamo perciò
scegliere un rapporto elevato tra diametro del disco e diametro dell’asse.
Il moto avviene ad accelerazione costante, come per i corpi in caduta libera, ma è come
se il campo gravitazionale “efficace” fosse ridotto del fattore k.
5.
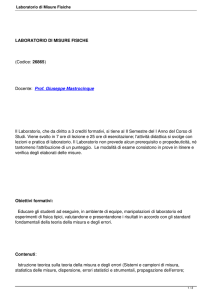
Apparato sperimentale.
Il pendolo e il suo interfacciamento
Se interfacciamo un pendolo di Maxwell ad un Personal Computer mediante un
sensore di posizione (sonar) ed un sensore di forza, possiamo studiarne la cinematica e
la dinamica con accuratezza e verificare le previsioni del modello sopra delineato.
Noi abbiamo usato due tipi di interfacce particolarmente adatte per l’impiego didattico
(ULI II e PASCO 500)4, dotate di un software, per la visualizzazione e la
manipolazione dei dati acquisiti, facile da usare ed insieme potente, e che comunicano
con il PC attraverso la porta seriale RS2325
4
Si tratta di interfacce “intelligenti”, dotate di microprocessore per la gestione
ottimizzata dei dati raccolti, prodotte rispettivamente della Vernier Software
(distribuitore EDUSA,POBox 510224, USA, [email protected]) e della PASCO
Scientific (distribuitore ELItalia, Milano, fax:02-2362467)
5 Nel Macintosh si possono usare le porte modem o stampante, nel PC-IBM le porte
COM1 o COM2.
6
sensore
di forza
sonar
interfaccia
Figura 3
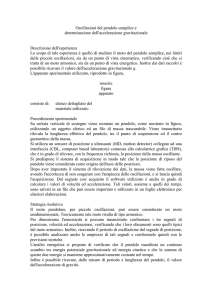
Il pendolo è costituito da un sottile disco metallico con un foro al centro in cui passa
un asse fissato al disco mediante una vite.
L’asse è ricavato da una barretta metallica tornita e forata come illustrato in figura 4
per realizzare un pendolo di Maxwell con diversi valori del rapporto R/r.
Alle estremità di ciascuna sezione sono praticati due sottili fori trasversali (1 mm) nei
quali possano passare i due fili che sostengono il pendolo.
cappio
viti di
blocco
r1
l
r2
fori per
filo
r3
l
l
asse
puleggia
s
Figura 4 (sistemare)
Abbiamo agganciato il pendolo ad un sensore di forza mediante un filo sottile e
robusto (lenza in dacron) lungo circa 1 metro, alle cui estremità sono stati ricavati due
cappi abbastanza lunghi da permetterne l’allacciamento all’asse come in figura 4 (si
7
infila nel foro ciascun cappio e si fa passare l’anello di filo uscente dal foro attorno
all’asse).
A seconda della coppia di fori usati si ottengono diversi valori di R/r .
6.
Una analisi sperimentale del moto.
In figura 5 è mostrata una registrazione della posizione, della velocità e della
accelerazione del pendolo6, e della tensione del filo verso il tempo durante il moto.
Figura 5 (sistemare)
I dati si riferiscono ad un pendolo di ottone di raggio R=47.5 mm, spessore 3 mm e
massa totale m=227 g. Le lunghezze dei tre tratti di asse con diversi diametri è l=20
mm, ed i tre raggi sono r1=5 mm, r2=3.17 mm e r3=2 mm, rispettivamente. I dati
sono stati registrati con il filo avvolto sulle sezioni dell’asse con raggio r3. Si vede
subito che la funzione x(t) è una successione di parabole, come quella che si otterrebbe
registrando il moto di una pallina che rimbalzi sul pavimento.
L’andamento della velocità nel tempo è infatti una successione tratti di rette con
pendenza negativa costante (pari al valore della accelerazione) separati da brevissimi
tratti in cui la accelerazione assume un valore positivo molto grande.
A prima vista sembra che la velocità cambi segno istantaneamente in corrispondenza
dei valori minimi della altezza (cioè negli istanti in cui il filo è tutto svolto). Ciò non è
esatto, come vedremo più in dettaglio in seguito.
Vediamo ora quanto dovrebbe valere la accelerazione in base al nostro modello: la
relazione [8] esprime la accelerazione in funzione di I, r, e g, ci basta quindi solo
calcolare il momento di inerzia per stimare a.
6
Velocità e accelerazione sono automaticamente calcolate con i dati di x(t) dal
pacchetto software.
8
Il momento di inerzia rispetto all’asse per un cilindro omogeneo di densità ρ, raggio R
e spessore s vale I=πR4sρ /2. Per il nostro pendolo, che è composto di quattro cilindri
coassiali, si ha :
r 4 + r24 + r34 2 l
I = ( πρ / 2)[ R 4 s + (r14 + r24 + r34 )2 l] = ( πρR 4 s / 2)1 + 1
R4
s
[10]
Il termine in parentesi grafa vale nel nostro caso circa 1.9×10-3, che possiamo
trascurare rispetto all’unità. E’quindi giustificato approssimare I con il momento di
inerzia del solo disco: I≈mR2/2,e porre k≈1+(R/r)2/2. Con i valori da noi usati
(R=47.5 mm, r=2 mm) otteniamo k≈283 e a= 0.035 m/s2,
Figura 6
Il valore misurato (a
in figura 6) conferma l’ordine di grandezza della
nostra previsione, ma il valore sperimentale risulta in eccesso di oltre il 20% .
L’approssimazione fatta per il calcolo di I è dell’ordine di 0.2% e una correzione che
tenga conto del momento di inerzia dell’asse andrebbe a ridurre ancora di più il valore
teorico di a. Per “far tornare i conti” dobbiamo allora ipotizzare che nella costruzione
del nostro modello sia stato trascurato qualche aspetto del fenomeno studiato.
Osserviamo allora che nella relazione [1] abbiamo assunto nullo lo spessore del filo,
che nel nostro caso ha invece uno spessore di circa 0.4 mm.
Se supponiamo che la lunghezza del filo che si avvolge sull’asse resti costante al centro
della sezione del filo stesso7, allora il valore efficace del raggio dell’asse che abbiamo
usato va aumentato di metà del diametro del filo8, cioè 0.2 mm, e questo porta il valore
di k a 232, e il valore previsto dell’accelerazione diventa a =0.042 m/s2.
=0.044m/s2
7
Facciamo cioè l’ipotesi che il filo sia un cilindro solido perfettamente elastico,
sottoposto ad una tensione costante, e ad una flessione con raggio di curvatura r..
8 Questa ipotesi può essere verificata qualitativamente ripetendo la misura con un filo
più sottile e con uno più spesso.
9
Se alternativamente usiamo il valore sperimentale di k=g/a=223 per calcolare
il valore efficace del raggio r troveremmo r =2.26 mm, corrispondente ad un filo
di spessore 0.5 mm.
Questo può insegnarci che i dettagli che a prima vista sembrano trascurabili si rivelano
a volte più importanti del previsto. In questo caso infatti la correzione dovuta allo
spessore finito del filo introduce una correzione del 27%, molto maggiore di quella
relativa al momento di inerzia dell’asse ( 0.2%, che possiamo continuare a trascurare) .
BISOGNA USARE UN DISCO OMOGENEO
10
7.
Il “peso” del pendolo in condizioni statiche e dinamiche
Chiunque si sia cimentato in un tuffo nell’acqua da una certa altezza ha provato il
senso di vuoto dovuto alla improvvisa “assenza di peso” nella caduta libera.
Nel caso della “caduta frenata” del pendolo di Maxwell è possibile mettere in evidenza
questa “variazione di peso” ?
Il sensore di forza cui il pendolo è attaccato misura continuamente la tensione del filo
in funzione del tempo, e quindi è possibile registrare l’evoluzione τ(t), ad esempio se
teniamo il pendolo bloccato con un altro filo, che ad in certo istante tagliamo per dare
inizio alla caduta.
Cerchiamo di valutare l’ordine di grandezza di tale variazione, per capire se ha senso
tentare di misurarla con l’apparato che abbiamo a disposizione. La forza misurata con
il pendolo fermo dev’essere uguale alla forza peso τo=mg, mentre quando il pendolo
cade essa vale τ1=mg–ma=m(g–g/k)=mg(1–1/k). La variazione relativa che vogliamo
apprezzare è quindi ∆τ/τ=(τo–τ1)/τ=k–1.
Con un limite di sensibilità del sensore di forza9 ∆F/F≈ 0.5%, possiamo apprezzare
l’effetto cercato solo se k<200, ovvero se R/r<√(400)≈20. Con R =47.5 mm dobbiamo
usare r>2.4 mm.
Scegliamo quindi r=r2=3.17mm, e un pendolo di l’alluminio
La massa del pendolo è ora 80 g e quindi τo=0.785N; R =47.5 mm, k=101 e ∆τ/τ≈10–2,
ovvero ci aspettiamo di rilevare una variazione di forza dell’ordine di τok≈8×10–3N.
Figura 7 (pendolo di alluminio)
9
La risoluzione dell’interfaccia è migliore di 0.1%, ma il rumore introdotto dalle
vibrazioni e la presenza di derive termiche e temporali rendono poco attendibili misure
con risoluzioni migliori di 0.5%.
11
In figura 7 è mostrata la registrazione della posizione e della forza prima e dopo
l’inizio della caduta: il valore medio della tensione è rispettivamente τo=0.786 N e
τ1=0.778 N . La differenza è proprio il valore aspettato.
La perturbazione nel grafico τ(t) all’inizio della caduta è dovuta all’azione della forbice
che taglia il filo che blocca il pendolo.
7.
Il teorema dell’impulso
Nel paragrafo 6 avevamo osservato che quando il pendolo arriva a “fine corsa” la sua
velocità lineare sembra cambiare verso istantaneamente, quando “collide con la fine del
filo” . In coincidenza con questo urto con l’invisibile parete posta al livello x=0, si può
osservare che il sensore di forza registra un picco. Cosa accade più esattamente?
Il pendolo scendendo ha acquistato una quantità di moto mv lungo la verticale e diretta
verso il basso, e quando il filo è tutto svolto esso tende ad allungarsi per consentire al
pendolo di proseguire il suo moto. Questo allungamento, per effetto della legge di
Hooke, sviluppa una forza contraria alla direzione del moto che accelera (verso l’alto)
il pendolo. Con l’aumentare della tensione del filo cresce anche l’accelerazione, ed
entrambe raggiungono un massimo in corrispondenza del valore x=0.
A questo punto la velocità è nulla e il baricentro del sistema comincia a salire. La
tensione comincia a diminuire, ma l’accelerazione è ancora diretta verso l’alto e la
velocità (positiva) cresce fino a che la tensione del filo torna ad essereτ1 (cioè quella
che esso aveva durante la discesa con il filo arrotolato sull’asse). A questo punto la
velocità del corpo ha cambiato di segno. Questo “urto con la fine del filo” avviene in
un tempo relativamente breve (∆t≈ 0.16 secondi, cfr. figura 8) cosicchè ad occhio
appare come istantaneo.
v2
v1
Figura 8 (dati delle figure 5 e 6 ottone)
La seconda legge di Newton può fornire una previsione quantitativa della velocità
dopo l’urto in funzione della velocità prima dell’urto e della forza di interazione fi(t)
sviluppata nella collisione. La relazione fi=ma=m(dv/dt) si può anche scrivere in forma
12
integrale: m∆v = ∫ fi (t )dt che ci assicura che la variazione della quantità di moto
nell’urto uguaglia l’integrale dell’impulso fidt.
La forza di interazione nel nostro caso è pari alla variazione ∆τ della tensione del filo
prodotta dalla “collisione” .
=================
Abbiamo visto già che prima della collisione la tensione vale τ1=mg(1–1/k) e quindi,
dato che il sensore misura sempre la tensione τ(t), la variazione della forza elastica che
si sviluppa nell’urto può essere scritta fi(t)=τ(t)–τ1 ≈F(t)–mg, ove F(t) è la forza
misurata dal sensore.
La legge di Hooke ci consente di scrivere τ=K ∆x, ove K è la costante elastica del
doppio-filo e ∆x l’allungamento. Poichè mg=K∆x1, ove x1 è l’allungamento in
condizioni di equilibrio stabile, possiamo scrivere fi=K∆X, con ∆X=∆x–∆x1.
Se per il momento trascuriamo la rotazione durante l’impulso possiamo considerare il
pendolo come un sistema massa-molla, ed aspettarci che il moto sia una oscillazione
armonica la cui pulsazione ω è determinata esclusivamente dalla costante elastica e
dalla massa: ω=√K/m.
In questa approssimazione, ci aspettiamo che la forza di interazione (tensione del filo)
abbia anch’essa un andamento all’incirca armonico, e questo ci permette di ricavare una
stima di K dalla misura della durata dell’impulso ∆t.
Dal grafico di figura 8 possiamo stimare ∆t≈0.16 s, e nell’ipotesi fatta poniamo
∆t≈T/2, ove T è il periodo di questo moto armonico, ed ω=2π/T =la sua pulsazione.
Questa stima del periodo T≈0.32 s fornisce il valore ω2=K/m≈400 s–1, e , nota la
massa m≈0.23 kg, otteniamo la stima di K≈90 N/m
Se ora scriviamo per lo spostamento ∆X(t) della massa m dalla posizione x=0 (pari
all’allungamento per effetto della “collisione”) la relazione
[11]
∆X(t) = A sinωt = ∆Xmax sinωt,
ove A è l’allungamento massimo del filo, per ricavare la velocità deriviamo rispetto al
tempo ottenendo la relazione
v(t) = Aω cosωt = vmax cosωt
[12]
ove Aω è il valor massimo della velocità, che possiamo stimare ancora usando il grafico
di figura 8: Aω ≈ 0.1 m/s.
Questo ultimo risultato ci consente di stimare il valor massimo dell’allungamento:
A= Aω /ω ≈ 0.1 / 20 =5 mm, valore ragionevole.
Per verificare la attendibilità delle stime fatte sin qui, vale la pena di vedere se le misure
di accelerazione durante la collisione forniscono risultati compatibili. Deriviamo
rispetto altemo anche la relazione [12], ottenendo:
a(t) = A ω2 sinωt = amax sinωt,
[13]
Le nostre stime ci fanno prevedere che il valor massimo della accelerazione dovrebbe
essere amax = A ω2 ≈ 0.005×400 =2 m/s2. Ebbene dal grafico di figura 6 vediamo che
questo è proprio il valore misurato.
La stima che abbiamo fatto per la costante elastica del filo K≈90 N/m può essere ora
confrontata con quella fornita dal valore della forza massima registrato durante la
collisione (τmax≈0.45 N in figura 8) diviso per il massimo allungamento stimato
K= τmax/ ∆Xmax ≈ 90 N/m.
13
Anche questo confronto risulta soddisfacente, e ciò conferma che il modello proposto
per la descrizione della collisione è abbastanza realistico.
9.
Calcolo del periodo
Abbiamo visto nel paragrafo 2 che il moto del nostro sistema è come quello di un grave
in caduta libera in un campo gravitazionale ridotto di un fattore k rispetto a quello
normale. Il tempo di caduta di un grave da una altezza h è t=√(2h/a). Quindi nel nostro
caso avremo t=√(2kh/g), e se trascuriamo la dissipazione (approssimando ad h la
altezza h’ a cui il corpo risale dopo un ciclo) il periodo del moto diventa :
T=2t=√(8k/g)√h= 2 2
h
.
g/k
[14]
Il periodo quindi è proporzionale alla radice quadrata dell’ampiezza.
La relazione [14] ci suggerisce l’unica analogia con il pendolo classico, in cui il periodo
l
, ove l è la lunghezza del pendolo. Nel pendolo di Maxwell, il
di oscillazione è 2π
g
rapporto tra lunghezza e accelerazione di gravità è sostituito dal rapporto tra la
lunghezza del filo e la “accelerazione di gravità ridotta” g/k, e il fattore 2π è sostituito
dal fattore 2√2.
9.
Conservazione e dissipazione dell’energia
La relazione [2] esprime la conservazione dell’energia totale durante la discesa e la
risalita del pendolo: possiamo provare a vedere come evolve nel tempo l’energia totale
calcolata secondo tale relazione con i valori di velocità registrati in figura 6, e usando il
valore sperimentale k=223.
Figura 9
E’ subito evidente che la relazione [2] non è in grado di descrivere correttamente la
conservazione dell’energia durante tutto il moto. E non solo perché si vede un graduale
14
rallentamento del moto ed una diminuzione progressiva dell’energia totale E (come già
sappiamo la dinamica del sistema reale contiene termini dissipativi) ma anche perchè,
in corrispondenza delle collisioni con la fine del filo, il valore calcolato di E
(grossolanamente costante durante la discesa) si azzera momentaneamente per poi
tornare al valore precedente all’urto.
Potremmo osservare che ciò che manca nella relazione [2] è il termine dovuto alla
energia elastica che viene immagazzinata nella variazione di tensione del filo (messa in
evidenza dal sensore di forza).
Il contributo dell’energia elastica durante la collisione potrebbe essere scritto
Ee=∆τ(x)∆X, ma questo non basterebbe a rimuovere i “buchi” di energia nel nostro
grafico.
Infatti il valor massimo dell’energia elastica è pari al valor massimo di Et≈Er/k<<Er.
La ragione di un così vistoso errore nella misura della energia ottenuta con il nostro
metodo risiede invece nel fatto che noi ricaviamo proprio il valore di Er da misure di
velocità traslazionale, cosa perfettamente lecita durante discesa e salita ma non
durante la collisione. Durante la collisione la velocità traslazionale, che ha raggiunto il
suo valor massimo, cala, si annulla, e cresce in direzione opposta fino a raggiungere il
suo massimo negativo. Invece la velocità angolare (da cui dipende Er) resta circa
costante in prossimtà del suo massimo valore.
Dissipazione
coeff. attrito viscoso: si può ricavare dalla costante di tempo? (supposto sia
efettivamente un esponenziale si ha circa 77 secondi)... massa≈227g, rapporto
raggi≈20
Si potrebbe cercare una sistematica variazione della accelerazione, con un
massimo attorno a v≈0 (i.e. x=max) e minimi attorno a vmax (i.e. x≈0), e la
differenza di accelerazione corrisponderebbe al momento torcente dell’attrito
viscoso. In tal caso...
La variazione di energia potenziale tra due massimi successivi si può stimare come
lavoro compiuto da una forza di attrito proporzionale alla velocità
x1
x1
t1
x0
x0
t0
∆U01 = ∫ fa dx = − ∫ kv( x )dx = − k ∫ v(t )2 dt
Mi aspetto cioè che i valori dei decrementi di ampiezza dei rimbalzi ∆xi siano
proporzionali agli integrali di v2 in un periodo
Grosso modo questa ipotesi è confermata dai dati sperimentali: sia i decrementi che gli
integrali calano quasi linearmente nel tempo (anche se su tempi brevi come 20 secondi
è difficile distinguere un andamento esponenziale da uno lineare...).
BISOGNA ACQUISIRE ALMENO PER 1 MINUTO (almeno 15 periodi)
10.
Conclusioni
(Ribadire che la tecnica on-line consente questo tipo di laboratorio...)