Addestramento di reti multistrato
² Struttura delle reti multistrato
² Proprietµ
a di approssimazione
² Formulazione dei problemi di addestramento
² Backpropagation e momentum
² Metodi di ottimizzazione per l'addestramento
² Il metodo del gradiente di Barzilai-Borwein
² Algoritmo non monotono di stabilizzazione
1
Struttura delle reti multistrato
L'architettura di una rete multistrato
(multilayer feed-forward, multilayer perceptron)
µ
e de¯nita da:
² M nodi di ingresso, sprovvisti di capacitµ
a di
elaborazione, associati agli ingressi xi 2 R
² un insieme di neuroni organizzati in L ¸ 2
strati, di cui:
{ L ¡ 1 strati nascosti (hidden layers) ;
{ uno strato di uscita, che fornisce le uscite
yi della rete
² un insieme di archi orientati e pesati che stabiliscono le connessioni.
Non esistono connessioni tra i neuroni di uno
stesso strato, n¶
e connessioni in feedback.
2
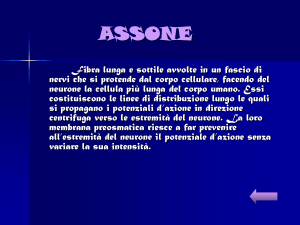
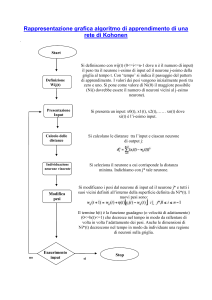
Rete multistrato
ingressi
x1
uscite
y1
x2
y2
x3
strato d’uscita
strato nascosto strato nascosto
Rete a 3 strati con 2 strati nascosti, 3 ingressi, 2 uscite.
3
Consideriamo una rete a 2 strati, con 1 strato
nascosto e 1 uscita (lineare):
²
xi: i¡ma componente dell'ingresso
² wji: peso della connessione tra l'ingresso i
e il neurone nascosto j
²
µj : soglia del neurone nascosto j
²
vj : peso della connessione tra il neurone
nascosto j e il neurone d'uscita
²
Ã: funzione di attivazione dei
neuroni dello strato nascosto
²
zj : uscita del neurone nascosto j
²
aj : combinazione dei segnali in ingresso
al neurone nascosto j
²
y: uscita della rete.
4
Si ha:
aj =
M
X
i=1
y=
wjixi ¡ µj ;
N
X
vj zj =
j=1
=
zj = Ã(aj );
N
X
0
vj à @
M
X
j=1
i=1
N
³
´
X
T
vj à wj x ¡ µj ;
j=1
j = 1; : : : ; N
1
wjixi ¡ µj A
dove wj = (wj1; : : : ; wjM )T .
La funzione di attivazione à si suppone usualmente di®erenziabile e sigmoidale. Le funzioni
piµ
u comuni sono la
funzione logistica
1
; c>0
¡ct
1+e
e la funzione tangente iperbolica
Ãc(t) =
1 ¡ e¡t
Ã(t) = tanh(t=2) =
:
¡t
1+e
5
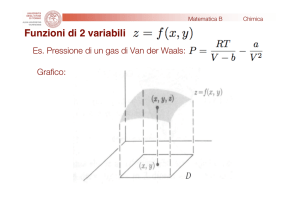
Rete con 2 strati e 1 strato nascosto
+
w11
w21
x1
1
2
ψ
z1
1
θ1
v1
w31
+
w12
x2
a1
w22
w32
a2
v2
y
+
2
θ2
v3
+
θ3
ψ
z2
a3
ψ
z3
3
6
Proprietµ
a di approssimazione
Le proprietµ
a di approssimazione delle reti multistrato sono state oggetto di numerosi studi.
In particolare, le reti a 2 strati con 1 strato
nascosto sono approssimatori universali per
le funzioni continue su insiemi compatti di RM ,
per un'ampia classe di funzioni di attivazione.
Poniamo
M(Ã) = spanfÃ(w0x ¡ µ); µ 2 R; w 2 RM g;
(ossia M(Ã) µ
e l'insieme di tutte le combinazioni
lineari delle funzioni ottenute applicando la funzione di attivazione à a una trasformazione
a±ne di x de¯nita da w e µ.)
Vale il risultato seguente
Teorema 1 (Pinkus, 1996) Sia à 2 C(R).
Allora M(Ã) µ
e denso in C(RM ), nella topologia
della convergenza uniforme sugli insiemi compatti se e solo se à non µ
e un polinomio.
7
Ne segue che, dati :
² una qualsiasi funzione f 2 C(RM ),
² un qualsiasi insieme compatto − ½ RM
² un qualsiasi " > 0
e ¯ssata una funzione di attivazione à qualsiasi
(purch¶
e continua e non polinomiale) si puµ
o
costruire una rete a 2 strati (con scelta opportuna del numero dei neuroni, e dei valori
dei pesi e delle soglie), tale che la funzione ingresso uscita g 2 M(Ã) realizzata dalla rete
soddis¯:
max jf (x) ¡ g(x)j < ":
x2−
Altri risultati recenti consentono di restringere
la scelta di w e µ e anche di allargare l'insieme
delle funzioni di attivazione ammissibili (cfr.
Pinkus, 1999).
8
Le reti a 2 strati consentono anche, in linea di
principio, di interpolare esattamente i dati.
Vale il risultato seguente.
Teorema 2 (Pinkus, 1999) Sia à 2 C(R)
non polinomiale.
M e K numeri
Dati K punti distinti fxigK
i=1 ½ R
K
M
f®igK
i=1 ½ R, esistono K vettori fwj gj=1 ½ R
K
e 2K numeri fvj gK
j=1; fµj gj=1 ½ R tali che
K
X
j=1
vj Ã(wjT xi ¡ µj ) = ®i;
i = 1; : : : ; K:
Molti studi recenti sono stati dedicati alla stima
del grado di approssimazione , in funzione
di M e del numero N di neuroni. Nel caso
generale, per funzioni appartenenti a spazi di
Sobolev, sono stati stabiliti lower bound sull'errore di approssimazione, che implicano la necessitµ
a di una crescita esponenziale del numero
di neuroni di una rete a 2 strati al crescere della
dimensione dello spazio.
9
Un risultato interessante µ
e che per reti a 3
strati (con 2 strati nascosti), in cui la funzione
ingresso-uscita sia del tipo
y=
N2
X
i=1
0
uià @
N1
X
j=1
1
T
vij Ã(wij
x ¡ µij ) ¡ °iA ;
non esistono lower bound teorici sull'errore di
approssimazione e vale il risultato seguente.
Teorema 3 (Maiorov and Pinkus, 1999)
Esiste una funzione di attivazione à 2 C 1,
strettamente crescente e sigmoidale tale che:
per ogni funzione f 2 C([0; 1]M ) ed ogni " > 0,
esistono costanti ui, vij , µij , °i e vettori
wij 2 RM , per cui risulta:
¯
0
1¯
¯
¯
4M+3
2M
+1
X
X
¯
¯
T
¯f (x) ¡
@
A
uiÃ
vij Ã(wij x ¡ µij ) ¡ °i ¯¯ < ";
¯
¯
¯
i=1
j=1
per ogni x 2 [0; 1]M :
10
Il teorema precedente µ
e basato sul famoso
Teorema di Kolmogorov (1957), che ha risolto (in senso negativo) la congettura di Hilbert
sull' esistenza di funzioni continue di tre
variabili, non rappresentabili come composizione di funzioni continue di due variabili
(13-mo problema di Hilbert).
Nel Teorema di Kolmogorov si dimostra che le
funzioni continue di n varabili si possono rappresentare come sovrapposizione di funzioni
di una variabile. Nella versione piµ
u semplice
(Lorentz, 1976) si ha
Teorema 4 Esistono n costanti ¸j > 0,
Pn
j=1 ¸j · 1 e 2n + 1 funzioni continue strettamente crescenti Ái : [0; 1] ! [0; 1] tali che ogni
funzione continua f di n variabili su [0; 1]n si
puµ
o rapprentare nella forma:
f (x1 : : : ; xn) =
2n+1
X
i=1
0
g@
n
X
j=1
1
¸j Ái(xj )A ;
per qualche g 2 C[0; 1] dipendente da f .
11
Il ruolo (controverso) del Teorema di Kolmogorov
nello studio delle reti neurali µ
e stato (ed µ
e tuttora oggetto) di un intenso dibattito.
Alcune delle versioni del Teorema sembrano
suggerire la rappresentazione di una funzione
attraverso una struttura di rete multistrato, in
cui perµ
o la funzione (di attivazione) g µ
e incognita e puµ
o avere un andamento fortemente
non smooth (Vitushkin (1964)). Ciµ
o potrebbe
rendere scarsamente signi¯cativa l'interpretazione neurale. Questa µ
e la tesi in
F.Girosi and T.Poggio, Representation properties of
Networks: Kolmogorov's Theorem is irrelevant, Neural
computation, 1989.
D'altra parte, in molti lavori recenti Kurkova,
Sprecher, Pinkus,..) il teorema di Kolmogorov
viene utilizzato per stabilire risultati di approssimazione attraverso reti multistrato.
V.Kurkova, Kolmogorov's Theorem is relevant,
Neu-
ral computation, 1991.
Cfr. anche il survey:
F.Scarselli and A.C. Tsoi, Neural Networks,1998.
12
Formulazione dei problemi di addestramento
Fissata l'architettura (2 strati, 1 uscita), e raccogliendo in un vettore w 2 Rn tutti i parametri
incogniti, il problema dell'addestramento relativo a un training set assegnato:
T = f(xp; dp); p = 1; : : : ; P g
viene usualmente formulato un come problema
di ottimizzazione del tipo:
P
1 X
min E(w) =
Ep(w);
w
2P p=1
e una misura dell'errore relativa al
in cui Ep µ
p¡mo pattern. La misura piµ
u usata µ
e l'errore
quadratico
Ep(w) = (y(xp; w) ¡ dp)2;
dove y(xp; w) µ
e l'uscita della rete in corrispondeza all'ingresso xp e al vettore di parametri w.
13
Le di±coltµ
a computazionali dei problemi di addestramento di reti multistrato sono tipicamente dovute a
² non compattezza degli insiemi di livello
² forti nonlinearitµ
a di E
² presenza di zone \piatte" nella super¯cie
della funzione d'errore
² possibile mal condizionamento dell'Hessiana
² elevata dimensionalitµ
a di w
² elevato numero P di campioni
² presenza di minimi locali
a di dover ripetere l'addestramento
² necessitµ
in corrispondenza a varie architetture, a varie
funzioni di errore, a vari criteri di arresto.
µ da notare, tuttavia che non µ
E
e richiesta una
grande precisione nella soluzione e puµ
o anche
essere preferibile interrompere il processo di
minimizzazione prematuramente (in base all'errore ottenuto su un validation set)
( \early stopping" ).
14
La compattezza degli insiemi di livello µ
e assicurata se alla funzione di errore si aggiunge
un termine di regolarizzazione, de¯nendo la
nuova funzione obiettivo
P
1 X
Ep(w) + °kwk2 ;
E(w) =
2P p=1
con ° > 0:
In tal caso tutti gli insiemi di livello
L(®) = fw 2 Rn : E(w) · ®g
sono compatti ed µ
e possibile stabilire risultati
di convergenza globale (a punti stazionari)
per molti algoritmi di ottimizzazione.
La presenza del termine di regolarizzazione µ
e
tuttavia motivata, nella teoria dell'apprendimento, dall'esigenza di migliorare le capacitµ
a di
generalizzazione, penalizzando valori elevati dei
pesi e prevenendo fenomeni di overtraining.
In particolare, ° potrebbe essere scelto utilizzando un validation set.
15
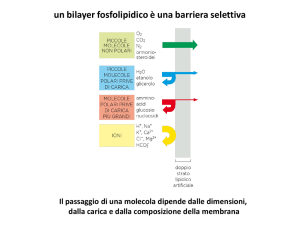
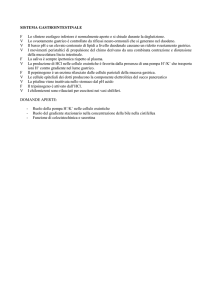
Super¯cie d'errore di una rete costituita da
1 solo neurone, con 1 ingresso e 1 uscita,
in funzione del peso e della soglia
16
Backpropagation e Momentum
Uno dei primi algoritmi proposti per il calcolo
dei pesi µ
e il metodo noto come metodo di
backpropagation (BP), e si puµ
o identi¯care
con il metodo del gradiente.
La versione batch µ
e de¯nita dall'iterazione
wk+1 = wk ¡ ´k rE(wk );
e il gradiente di E in wk
dove: rE(wk ) µ
´k 2 R (learning rate) de¯nisce il passo.
Il termine backpropagation µ
e legato alla tecnica utilizzata per il calcolo del gradiente, che
si puµ
o ricondurre attualmente a una tecnica di
di®erenziazione automatica.
Una tecnica analoga µ
e quella utilizzata da tempo
nei problemi di controllo ottimo per esprimere
(in funzione di stato e costato) il gradiente
rispetto al controllo (Bryson-Ho, 1969).
17
Sia wji il peso di un arco entrante nel neurone j. Calcoliamo il termine @Ep =@wji
(per una rete multistrato di tipo generale).
i
zi
wji
aj
zj
ψ
j
Utilizzando le regole di derivazione, e tenendo conto
della struttura, si puµ
o porre
@Ep @aj
@Ep
=
:
@wji
@aj @wji
De¯nendo
@Ep
;
@aj
±j =
e ricordando che
aj =
X
wjizi;
i
dove la sommatoria µ
e estesa ai neuroni e agli ingressi
che inviano archi a j (inclusa la soglia wj0 con z0 = 1),
si ha
@Ep
= ±j zi:
@wji
18
Basta calcolare zi, ±j per ottenere la derivata.
e l'uscita del neurone i e quindi si puµ
o
La quantitµ
a zi µ
determinare, a partire dall'ingresso, applicando successivamente le trasformazioni de¯nite dalla rete
( propagazione in avanti degli ingressi ).
Rimane da calcolare, per ogni neurone, la quantitµ
a
±j =
@Ep
:
@aj
Distinguiamo due casi:
(a) il neurone k appartiene allo strato d'uscita.
δk
ak
Ψ’(ak)
yk
δΕ
δyk
k
In tal caso yk = Ã(ak ) e quindi
@Ep
@Ep
= Ã(ak )0
;
@ak
@yk
essendo Ã(ak )0 la derivata della funzione di attivazione
e @Ep=@yk calcolabile analiticamente.
±k ´
19
(b) il neurone j µ
e un neurone nascosto.
In tal caso, si puµ
o porre:
X @Ep @ak
@Ep
=
;
±j ´
@aj
@ak @aj
k
dove la somma µ
e estesa a tutti i neuroni (nascosti o
d'uscita) che ricevono segnali dal neurone j.
(Ep dipende da aj solo attraverso la dipendenza da ak ) .
Essendo
ak = : : : + wkj zj + : : :
=
: : : + wkj Ã(aj ) + : : :
si ha:
@ak
= Ã(aj )0wkj ;
@aj
e quindi si puµ
o scrivere
X
0
±j = Ã(aj )
±k wkj ;
k
Quindi:
le quantitµ
a ±j (dette errori) relative ai neuroni di uno
strato, si ottengono propagando all'indietro lungo la rete
gli errori relativi ai neuroni dello strato successivo, a
partire dallo strato d'uscita.
( retro-propagazione degli errori )
20
Retro-propagazione
a
δj
k
ψ
Ψ’(aj)
k
k
wkj
+
y
δk
k
j
±j = Ã(aj
)0
X
±k wkj :
k
La tecnica di backpropagation consente di calP
colare rE = p rEp con un costo
O(P £ W );
dove W µ
e il numero di parametri, P il numero
di pattern.
21
La convergenza del metodo BP, per un valore
costante della learning rate ´ puµ
o essere garantita nell'ipotesi che il gradiente di E soddis¯
una condizione di Lipschitz, ossia esista L tale
che, per ogni w; u si abbia:
krE(w) ¡ rE(u)k · Lkw ¡ uk:
Fissato un punto iniziale w0 2 Rn de¯niamo
l'insieme di livello
L0 = fw : E(w) · E(w0)g:
Vale il risultato seguente.
Teorema 5 Supponiamo che valga una condizione di Lipschitz su un insieme limitato convesso contenente L0 e che si assuma
2¡"
;
L
con " > 0. Allora la successione fwk g de¯nita
da
"·´·
wk+1 = wk ¡ ´rE(wk )
ha punti di accumulazione e ogni punto di accumulazione µ
e un punto stazionario di E.
22
In pratica, puµ
o essere di±cile stimare L e un
passo costante µ
e in genere ine±ciente.
Sono disponibili varie tecniche di ricerca unidimensionale, ben note nel campo dei metodi
di ottimizzazione, che garantiscono la convergenza e fanno migliorare notevolmente il comportamento del metodo.
Tuttavia, tutte le implementazioni tradizionali
del metodo del gradiente sono in generale inef¯cienti e possono richiedere un numero molto
elevato di iterazioni e di valutazioni della funzione e del gradiente anche per problemi di piccola dimensione.
Una modi¯ca spesso e±cace µ
e la cosiddetta
momentum updating rule
wk+1 = wk ¡ ´rE(wk ) + ¯(wk ¡ wk¡1);
dove ´ > 0 e ¯ > 0 sono valori ¯ssati
(ad es. ´ ¼ 0:01 ¥ 0:001, ¯ ¼ 0:7 ¥ 0:9).
23
Tale modi¯ca µ
e nota nel campo dei metodi
di ottimizzazione come Heavy Ball method
(HB), a causa dell'analogia con il moto di un
corpo pesante in un campo di forze, in presenza
di attrito.
Si puµ
o enunciare il risultato seguente, che µ
e un
risultato di convergenza locale.
Teorema 6 (Poljak, 1964) Sia w¤ un punto
di minimo di E, tale che la matrice Hessiana
sia de¯nita positiva e abbia tutti gli autovalori
in [`; L] con ` > 0. Supponiamo che
0 · ¯ < 1;
0 < ´ < 2(1 + ¯)=L:
Allora esiste " > 0, tale che se w0; w1 stanno
nella sfera fu : jju ¡ w¤jj · "g, il metodo (HB)
a lineare.
converge a w¤ con rapiditµ
24
Nel caso quadratico si dimostra che, con una
scelta opportuna dei parametri, la rapiditµ
a di
convergenza µ
e superiore a quella del metodo
del gradiente ed µ
e comparabile con quella del
gradiente coniugato. La scelta ottima µ
e
p !2
Ãp
4
L¡ `
p
p
´= p
¯= p
2
( L + `)
L+ `
e garantisce un bound sul rapporto fra gli errori
consecutivi approssimativamente eguale a
p
p
L¡ `
p :
p
q=
L+ `
Nel metodo del gradiente con ricerche esatte
L¡`
q=
:
L+`
Nel caso generale, tuttavia la convergenza non
puµ
o essere garantita e la scelta dei parametri
puµ
o essere di±cile.
Il metodo µ
e stato applicato con criteri euristici
e risulta notevolmente piµ
u e±ciente, in pratica,
rispetto al metodo del gradiente anche per valori costanti di ´ e ¯.
25
Metodi di ottimizzazione per l'addestramento
Per l'addestramento di reti multistrato sono
utilizzabili i metodi di ottimizzazione non vincolata per problemi a grande dimensione e in
particolare:
² Metodi delle direzioni coniugate
(implementazioni globalmente convergenti del
metodo di Polak-Ribiµ
ere)
² Metodi Quasi-Newton a memoria
limitata
² Metodi tipo Gauss-Newton (troncati)
² Metodi di Newton (troncati)
µ possibile fornire formule di backpropagation
E
anche per il calcolo dell'Hessiana, per il calcolo
del prodotto Hessiana£direzione e per il calcolo
della Jacobiana (in Gauss-Newton) (Bishop).
Tuttavia per il calcolo delle derivate seconde il
costo puµ
o crescere con O(P £ W 2) .
26
La classe di metodi di addestramento piµ
u e±ciente, nei problemi di \media" di±coltµ
a e con
numero di variabili dell'ordine del migliaio appare essere quella dei
metodi Quasi-Newton a memoria limitata .
Tuttavia il limite principale dei metodi tipo
Quasi-Newton (e dei metodi del Gradiente Coniugato) nei problemi di addestramento \difa
¯cili" risiede nel requisito di monotonicitµ
nella riduzione di E:
E(wk+1) < E(wk );
che deve esere \su±ciente" e deve essere
assicurata attraverso ricerche unidimensionali
abbastanza accurate e costose .
Ciµ
o puµ
o comportare costi computazionali inaccettabili, soprattutto in presenza di \valli
ripide"
(di±coltµ
a tipica dei problemi non lineari, in
presenza di mal condizionamento della matrice
Hessiana).
27
Esempio: Funzione di Maratos
2 ¡ 1)2
F (x) = x1 + ¿ (x2
+
x
1
2
(¿ = 10)
Per valori abbastanza elevati di ¿ la funzione ha
una valle (lungo x21 + x22 = 1) ed ha punto di minimo
prossimo a (¡1; 0). Tutti i metodi monotoni devono
seguire la valle.
28
Il metodo del gradiente di Barzilai-Borwein
Una recente versione del metodo del gradiente,
nota come metodo del gradiente di BarzilaiBorwein (BB), appare particolarmente promettente nei problemi di addestramento \di±cili".
Il metodo BB µ
e un metodo di tipo gradiente
descritto dallo schema iterativo
1
k+1
k
w
= w ¡ k rE(wk )
®
e de¯nito mediante una delle
dove lo scalare ®k µ
seguenti formule
sT y
®1 = T
s s
yT y
®2 = T
s y
con
s = wk ¡ wk¡1;
y = rE(wk ) ¡ rE(wk¡1):
29
Le scelte dello scalare ®k sono connesse
all'equazione Quasi-Newton
Bs = y
dove B µ
e una matrice n £ n simmetrica de¯nita
positiva che approssima la matrice Hessiana
r2E(wk ).
Infatti, gli scalari
sT y
®1 = T
®2 =
s s
minimizzano, rispettivamente:
yT y
sT y
1
k®Is ¡ yk
ks ¡ Iyk
®
(Ossia B viene scelta della forma B = ®I)
Altra interpretazione:
Nel caso quadratico, ®1 e ®2 sono approssimazioni degli autovalori ¸i dell'Hessiana.
Per una funzione quadratica, il metodo del
gradiente converge in n passi se gli spostamenti sono 1=¸i, per i = 1; : : : ; n.
30
La convergenza del metodo del gradiente BB µ
e
stata stabilita nel caso di obiettivo quadratico
strettamente convesso (Raydan, 93).
Nel caso generale, il metodo BB puµ
o non convergere. Un metodo di stabilizzazione globale
(GBB method), (Raydan, 97) µ
e de¯nito da
1
k)
=
rE(w
®k
dove 0 < ¸k · 1 µ
e calcolato per mezzo di una
line search non monotona di tipo Armijo
(introdotta originariamente per stabilizzare il
metodo di Newton) (Grippo, Lampariello,
Lucidi, 86), e basata sulla condizione
wk+1
wk
¡ ¸k
E(wk + ¸dk ) ·
max
0·j·min(k;M)
n
E(wk¡j )
o
+ °¸rE(wk )T dk ;
dove
1
dk = ¡ k rE(wk )
®
e il passo BB (eventualmente modi¯cato).
e ®k µ
31
Il metodo GBB
² consente di migliorare notevolmente il
comportamento del metodo del gradiente
²µ
e competitivo con il metodo del gradiente
coniugato anche nei problemi convessi
a grande dimensione
² puµ
o richiedere un costo computazionale
elevato in problemi di±cili.
µ necessario un ulteriore rilassamento della non
E
monotonicitµ
a (Fletcher,2001)
Una nuova tecnica di stabilizzazione non
monotona del metodo BB µ
e stata de¯nita recentemente ed µ
e basata su:¤
{ la combinazione di una tecnica
watchdog non monotona
con una
line search non monotona
{ l'introduzione di una nuova linesearch che
consente anche incrementi del passo
Appare particolarmente promettente
per l'addestramento di reti multistrato
¤ Grippo
e Sciandrone, 2001, in corso di stampa su
Computational Optimization and Applications
32
Algoritmo non monotono di stabilizzazione
Lo schema di globalizzazione proposto (NMS1)
µ
e applicabile ad un metodo qualsiasi.
Si puµ
o descrivere de¯nendo
² una sequenza di iterazioni principali k = 0; 1::
che producono i punti wk
² per ogni k, una sequenza di iterazioni interne
che generano attraverso un algoritmo locale
una sequenza ¯nita di N punti:
k
yik ; y2k ; : : : ; yN
Si suppone che per ogni k sia generata una direzione dk gradient-related, ossia tale che
kdk k · c1krE(wk )k
rE(wk )T dk · ¡c2krE(wk )k2;
per c1; c2 > 0.
Ad esempio dk = (1=®k )rE(wk ); con
0 < " · ®k · 1=":
33
Un'iterazione principale puµ
o essere descritta dallo
schema seguente
Algoritmo NMS1
Passo 1. Calcola la direzione dk e poni
p1 = dk ;
y1 = wk + dk
Passo 2. Per i = 2; N determina una direzione
pi (con un algoritmo qualsiasi) e poni
yi = yi¡1 + pi
Passo 3. Se risulta
E(yN ) ·
max
fE(wk¡j )g ¡ ¯(
0·j·min(k;M )
N
X
i=1
kpik);
dove M ¸ 0 µ
e un intero pre¯ssato, poni
wk+1 = yN ;
altrimenti determina ¸k utilizzando un
algoritmo di ricerca unidimensionale
non monotono e poni
wk+1 = wk + ¸k dk
34
La ricerca unidimensionale deve soddisfare la
condizione seguente:
Condizione sulla line search (LS)
Sia K un sottoinsieme di indici tale che
wk+1 = wk + ¸k dk ;
Allora:
(C1) Per ogni k 2 K risulta:
E(wk + ¸k dk ) ·
max
0·j·min(k;M)
k 2 K;
fE(wk¡j )g¡¾(¸k kdk k);
dove M ¸ 0 µ
e un intero pre¯ssato,
e ¾ : R+ ! R+ µ
e una funzione di forzamento;
(C2) Se K µ
e un sottoinsieme in¯nito, se fE(wk )g
converge e se fwk gK µ
e limitata, allora si ha
rE(wk )T dk
lim
= 0:
k
k!1;k2K
kd k
La condizione (LS) puµ
o essere soddisfatta in
modo costruttivo, attraverso un algoritmo di
ricerca unidimensionale che ammette anche eventuali incrementi del passo di primo tentativo
¸=1
35
Si puµ
o dimostrare il seguente risultato.
Teorema 7 Supponiamo che l'insieme di
livello L0 sia compatto, che che fwk g sia una
successione in¯nita prodotta dall'algoritmo
NMS1 e che la condizione LS sia soddisfatta.
Allora:
(i) fwk g ½ L0 ed ha punti limite
e
(ii) Ogni punto limite della sequenza fwk g µ
e un
un punto stazionario di E in L0, e non µ
punto di massimo locale.
(iii) Siano fyik g, con i = 1; : : : ; N le sequenze
dei punti generati e accettati dall'algoritmo
nelle iterazioni interne.
Allora ogni punto
e un punto
limite di ogni sequenza fyik g µ
e un punto di
stazionario di E in L0, e non µ
massimo locale.
36
Esperienza computazionale
² Il metodo BB µ
e stato inserito nell'algoritmo
di stabilizzazione, utilizzando sia ®1 che ®2
nelle iterazioni locali
² l'algoritmo µ
e stato sperimentato su un
elevato numero di problemi test (CUTE)
con dimensione n da 100 a 10000
² confronti con un metodo Quasi-Newton
a memoria limitata (NAG)
² risultati preliminari su problemi di
addestramento di reti neurali multistrato
La sperimentazione ha mostrato che:
² nei problemi test a grande dimensione il metodo
µ
e competitivo con tecniche tipo Q-N;
² consente di risolvere problemi di±cili
non a®rontabili con metodi monotoni;
² appare particolarmente adatto a risolvere
problemi di addestramento di reti neurali;
²µ
e di semplice programmazione.
Promettente anche la stabilizzazione non
monotona del metodo \momentum".
37
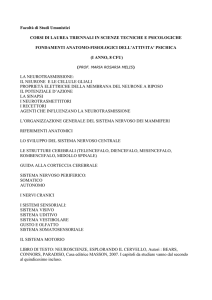
Esempio 1
Rete multistrato (1,2,1) per approssimare sen(x)
1. Prime 300 iterazioni
Approssimazione Sen(x)
100
10
BP
Armijo
Momentum
NMS1(20)
28
25
22
19
16
13
7
4
10
E(w)
1
1
0.1
0.01
0.001
Iterazioni(/10)
38
Esempio 1
Rete multistrato (1,2,1) per approssimare sen(x)
2. 5000 iterazioni
Approssimazione Sen(x)
100
10
E(w)
0.1
469
433
397
361
325
289
253
217
181
145
109
73
37
1
1
BP
Armijo
Momentum
NMS1(20)
0.01
0.001
ITERAZIONI/10
39
Esempio 2
Problema di addestramento 50 neuroni
Modello neurale di combustore
Combust1 50
100000
1000
Q. Newton
NMS1(2)
100
10
100
91
82
73
64
55
46
37
28
19
10
1
1
lo g E (w )
10000
ng/10
40
Esempio 3
Funzione di Maratos
Iterazioni 5-40
Omessi alcuni salti non monotoni
1.5
1
0.5
-1
-1.5
41
33
31
29
27
25
23
21
19
17
15
13
11
9
7
5
3
1
-0.5
QN
35
NMS2
0
Esempio 3
Funzione di Maratos
iterazioni 40-6289 (QN)
1.5
1
0.5
NMS2
1
394
787
1180
1573
1966
2359
2752
3145
3538
3931
4324
4717
5110
5503
5896
6289
0
-0.5
-1
-1.5
42
QN
Ricerca in corso
² Estensioni del metodo BB basate su
stime diverse del passo (uso dei passi BB
calcolati in iterazioni precedenti)
² Stabilizzazione non monotona del metodo
Momentum
² Versioni senza derivate del metodo BB
² Sperimentazione di tecniche di addestramento per reti con 2 strati nascosti
o per reti di Kolmogorov
43