PrjOfLin.doc
1
Indice
Indice................................................................................................................................................... 2
Progettazione di un convertitore flyback off–line ............................................................................. 4
Dimensionamento del trasformatore......................................................................................................... 8
Sezione dei conduttori ...............................................................................................................................................9
Dimensionamento del condensatore di filtro in ingresso ....................................................................... 11
Ulteriori passi del progetto....................................................................................................................... 12
Rete di retroazione...................................................................................................................................................12
Circuito ausiliario di alimentazione.........................................................................................................................13
Circuito di bootstrap ................................................................................................................................................13
Filtro di uscita..........................................................................................................................................................15
Protezione dal sovraccarico e dal cortocircuito .......................................................................................................16
Note............................................................................................................................................................. 16
Progettazione di un convertitore forward off-line........................................................................... 17
Caratteristiche comuni a tutta la famiglia .............................................................................................. 17
Descrizione generale.................................................................................................................................. 17
Principio di funzionamento ...................................................................................................................... 18
Dimensionamento del trasformatore....................................................................................................... 20
Sezione dei conduttori .............................................................................................................................................21
Dimensionamento del condensatore di filtro in ingresso ....................................................................... 21
Filtro di uscita............................................................................................................................................ 22
Ulteriori passi di progetto......................................................................................................................... 23
Circuito di bootstrap ................................................................................................................................................23
Circuito ausiliario di alimentazione.........................................................................................................................23
Protezione dal sovraccarico e dal cortocircuito .......................................................................................................23
Protezione contro l’apertura del circuito di feedback (sovratensione in uscita) ................................. 23
Convertitore forward a due transistor .................................................................................................... 24
Convertitore push-pull.............................................................................................................................. 25
Appendice A Fili di Litz.................................................................................................................... 28
Dettagli sulla fabbricazione ...................................................................................................................... 28
Appendice B Induttori toroidali: calcolo e note varie ..................................................................... 30
Calcolo........................................................................................................................................................ 30
Note varie ................................................................................................................................................... 30
Produttori e distributori di nuclei toroidali ..............................................................................................................31
PrjOfLin.doc
Pag. 2
Appendice C Costanti Fisiche .......................................................................................................... 32
Appendice D Tabella delle sezioni AWG ......................................................................................... 33
PrjOfLin.doc
Pag. 3
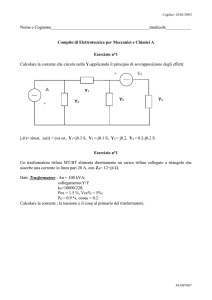
Progettazione di un convertitore flyback off–line
optional
+
+
+
Vout
Vin
controller
PWM
Qui si prende in esame solo il caso di convertitore funzionante in modo discontinuo, che è il più
usato. Le considerazioni valgono sia per il current mode, che per il voltage mode. Pur se si esamina
qui specificatamente il caso di un convertitore off–line, le considerazioni svolte valgono in generale
anche per un convertitore DC/DC e per un convertitore AC/DC a bassa tensione (secondary
switching).
Il convertitore flyback funziona sullo stesso principio del convertitore di tipo boost, con la
differenza che si ha un trasformatore per permettere l’isolamento galvanico tra ingresso e uscita. Il
principio di funzionamento è immagazzinare energia magnetica nel nucleo del trasformatore,
quando il transistor è acceso, per poi trasferirla al carico quando il transistor è spento. La tensione
che si ritrova sul secondario non è correlata al rapporto spire, come invece avviene nei convertitori
di tipo forward: il rapporto spire gioca un ruolo nel determinare le correnti e le tensioni di picco sul
primario e sul secondario. Il picco di corrente nel secondario è comunque legato a quello nel
primario con la solita relazione. Si gioca con il rapporto spire per ottenere il miglior compromesso
fra:
•
corrente nel transistor
•
correnti sul trasformatore
•
tensione inversa sul diodo di uscita
• tensione sul transistor in stato off
Il trasformatore deve immagazzinare energia magnetica nel nucleo, quindi questo deve essere del
tipo con traferro (gap). Il traferro può essere realizzato tramite un piccolo spazio d’aria sulle
colonne del trasformatore, quando si utilizzano nuclei tipo E, ETD, olle, ecc., oppure utilizzando
nuclei toroidali con traferro distribuito: nuclei tipo MPP, o Kool-Mµ (realizzati mischiando polveri
di ferrite a resine).
Nel convertitore flyback il trasformatore si comporta come due induttori accoppiati, quando
conduce il primario, il secondario è spento, e viceversa, e avviene un trasferimento di energia dal
primario al secondario.
PrjOfLin.doc
Pag. 4
Il condensatore di filtro si dimensiona in base al tempo di hold-up richiesto (cioè il tempo in cui
deve continuare a funzionare anche se manca la tensione di ingresso): si veda il paragrafo ad esso
dedicato per tutti i dettagli.
Si inizia con l’impostare i parametri di progetto:
Vo : tensione nominale di uscita
I o : corrente nominale di uscita
f : frequenza di lavoro del convertitore switching
T : pari a 1 f
η : rendimento approssimato ipotizzato (circa 0.8)
Ton % : percentuale del periodo del segnale di comando in cui il transistor di potenza rimane acceso.
< 50% se si vuole evitare di fare la slope compensation sui current mode controller.
Ton =
Ton %
T
100
Tdead % : percentuale del periodo del segnale di comando non assegnato nè al periodo di on, nè a quello
di off del transistor (il periodo di off serve per assicurare un adeguato reset al nucleo del
trasformatore). Il dead time serve per avere margine per garantire il buon funzionamento, senza
saturazioni, anche in condizioni al limite, o quando si ha un brusca variazione del carico
all' uscita.
Tdead =
Tdead %
T
100
Vin min : minima tensione di ingresso per cui il circuito deve funzionare (tiene conto del ripple, delle
variazioni sul valore nominale e del tempo di hold - up).
Vin max : massima tensione di ingresso.
Vd : tensione di conduzione del diodo raddrizzatore all' uscita.
Von : tensione di conduzione del transistor: pari a VCEsat per un BJT a RDSon ⋅ I pk per un MOSFET
Gli altri parametri di lavoro sono i seguenti:
I pk = corrente di picco sul primario, al termine del periodo Ton
L p =induttanza del primario del trasformatore
Toff = T − Ton − Tdead
Treset = Toff . E' il tempo lasciato al nucleo per resettarsi.
L’energia immagazzinata nell’induttore costituito dal primario è:
E=
1
2
L p I pk
2
PrjOfLin.doc
(1)
Pag. 5
mentre la corrente che scorre nel primario durante il tempo Ton è:
IL =
Ton
1
∫L
0
(2)
Vin dt
p
Ora si passa a calcolare la corrente di picco sul primario I pk , che scorre al termine del periodo di
conduzione e l’induttanza L p del primario. I valori si calcolano con il Ton massimo, la Vin minima
e la I o massima. Questa corrente è indipendente da Vin , perché se questa varia, Ton varia
conseguentemente, in modo da mantenere costante l’energia accumulata.
I valori si ricavano impostando un sistema di equazioni composto dalla (1) e dalla (2):
1
2
E = 2 L pk I p
Ton
I L = 1 Vin dt
∫0 L p
che risolto fornisce:
2 I o (Vo + Vd )
T
Vin min on % η
100
I pk =
2 I o (Vo + Vd )
T
Vin min on η
T
I pk =
Lp =
(3)
(3)bis
V 2 in min T 2 onη
T ⋅ 2 I o (Vo + V ) d
Il rapporto spire
Np
Ns
(4)
è ora fissato, in quanto deve essere impostato in modo che il nucleo del
trasformatore si resetti nel tempo in cui il transistor è spento. Per maggior sicurezza si impone che
Ton + Treset sia inferiore a T , per avere un po’ di margine:
Treset = T − Ton − Tdead
(5)
Il reset è imposto in modo che il prodotto V • secondi applicato al primario durante Ton eguagli il
prodotto V • secondi durante Treset , tenendo conto che, durante la conduzione del secondario, la
tensione sul primario è:
V1 = (Vo + Vd )
Np
(6)
Ns
Impostando l’uguaglianza dei due prodotti volt secondo:
(V
in min
− Von )Ton =
Np
Ns
(Vo + Vd )(T − Ton − Tdead )
(7)
Il rapporto spire, in funzione dei parametri di progetto, è allora il seguente:
PrjOfLin.doc
Pag. 6
Np
Ns
=
(V
in min
− Von )Ton
(8)
(Vo + Vd )(T − Ton − Tdead )
Calcoliamo anche la tensione di picco sul transistor, senza considerare il leakage spike:
V pk = Vin max + (Vo + Vd )
Np
(9)
Ns
Il leakage spike è circa il 30% di V pk . Bisogna assicurarsi che il transistor riesca a sopportare tutta
la tensione. Se V pk è troppo elevata, bisogna ridurre il Ton , tenendo però conto del fatto che così
aumentano le correnti.
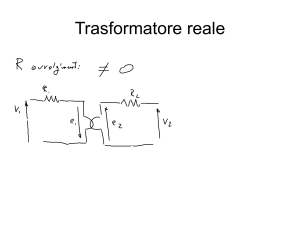
A questo punto possiamo calcolare i valori rms delle correnti a primario e a secondario, necessari
per stabilire il diametro dei fili degli avvolgimenti. Sia la corrente a primario che quella a
secondario hanno una forma triangolare, che parte da 0 e arriva al massimo, sul primario, e che
parte da un massimo e arriva a 0, sul secondario. Il valore di picco della corrente sul secondario è
pari quella a primario riflessa attraverso il rapporto spire:
I pk sec = I pk
Np
(10)
Ns
Corrente a primario
Ton
Toff
Tdead
Toff
Tdead
Corrente a secondario
Ton
I valori rms sono i seguenti
I rms =
I pk
I rms sec =
Ton %
3 100
I pk N p
3 Ns
(11)
T − Ton − Tdead
T
(12)
Ora si passa a verificare che, con i valori minimi e massimi della tensione in ingresso, ci sia
effettivamente il tempo per il reset del nucleo. Si può anche verificare qual è il Ton per la tensione
di ingresso nominale.
PrjOfLin.doc
Pag. 7
Si calcola Ton imponendo che la potenza a primario eguagli quella a secondario, comprendendo nel
conto anche il rendimento. La potenza sul primario è data dalla (1), usando la (3) e la (4) per
esplicitare i parametri, mentre quella sul secondario, considerando anche il rendimento è:
Psec =
I o (Vo + Vd )
η
(13)
Uguagliando quindi la (1) con la (13) si ha:
Ton =
2 I o (Vo + Vd )
Vin I pk η f
(14)
Si passa ora a calcolare il tempo di reset necessario al nucleo, ottenuto sempre uguagliando il
prodotto volt secondo in stato di on, con quello in stato di off. Si riscrive la (7) come:
(Vin − Von )Ton =
Np
Ns
(Vo + Vd )(Treset )
e si ricava, utilizzando Ton dato dalla (14):
Treset = Ton
(Vin − Von ) N s
Vo + Vd N p
(15)
A questo punto il dimensionamento elettrico è completato. Bisogna dimensionare il trasformatore e,
dato che il rapporto spire non verrà esattamente quello desiderato, bisognerà tornare indietro e
verificare le correnti rms, di picco, la tensione di picco V pk , Ton e Treset .
Dimensionamento del trasformatore
Il tipo nucleo si sceglie in base alle esigenze contingenti. Per usi generali si utilizzano nuclei EE,
oppure ETD. Se è necessaria una buona schermatura EMI e RFI si utilizzano olle, o nuclei RM,
soprattutto per basse potenze. Gli altri nuclei soddisfano esigenze specifiche: per esempio, se si
hanno problemi di ingombro in altezza si userà un nucleo EFD, oppure un nucleo toroidale in
molypermalloy se si desidera una buona schermatura RFI e non è necessario l’isolamento fra
primario e secondario (un trasformatore su ferrite toroidale è difficile da isolare a 4KV!). Una prima
stima delle dimensioni del nucleo può essere effettuata utilizzando le tabelle pubblicate in vari libri,
o nei data sheet dei produttori di ferriti. In base a questi dati si ha un punto di partenza per trovare,
per tentativi, il nucleo più adatto all’esigenza specifica. Bisogna considerare che, in un
trasformatore flyback, per potenze superiori a pochi watt, è necessario traferrare il nucleo, per
evitare saturazioni. In caso di nucleo ad E il traferro va posto, di preferenza, solo sulla gamba
centrale, coperto dagli avvolgimenti, per evitare flussi dispersi e disturbi nell’ambiente circostante.
I parametri di partenza da utilizzare per il progetto sono:
Ae : area equivalente del nucleo, in m 2
L1000 : induttanza per 1000 spire in H , calcolata con lo spessore di traferro stabilito
Si calcola ora il numero di spire del primario:
Np =
Lp
L1000
PrjOfLin.doc
(16)
Pag. 8
Questo valore si approssima in genere all’intero superiore, a meno che sia molto vicino all’intero
inferiore.
Il numero di spire sul secondario si calcola utilizzando il rapporto spire teorico calcolato in
precedenza con la (8):
Ns =
Np
Np
Ns
A questo punto bisogna verificare che l’induzione massima nel nucleo non sia troppo elevata. In
linea di massima si possono utilizzare i seguenti valori di induzione massima:
Frequenza
Induzione massima
50 kHz o meno
160 mT
100 kHz
120 mT
200 kHz
80 mT
Per frequenze pari o inferiori a 50 kHz, il conto delle perdite ammetterebbe induzioni anche
maggiori di 160 mT. Però è bene limitarsi a tale valore per evitare problemi nei transitori che si
verificano con i bruschi aumenti del carico sul secondario del trasformatore.
Bmax =
L p I pk
(17)
N p Ae
Se Bmax ha il valore desiderato va tutto bene e si procede oltre. Se invece è troppo alto, o troppo
basso bisogna ritornare indietro variando il traferro o l’area del nucleo.
A questo punto si calcolano i valori reali, ottenuti con un numero di spire intero, per i valori di
induttanza del primario, per le tensioni di picco sul transistor e sul diodo, e per il rapporto spire, e si
verifica che non ci siano problemi.
L’induttanza primaria reale è:
L = N p2 ⋅ L1000
La tensione di picco sul transistor, senza considerare il leakage spike è:
V pk = Vin max +
Np
Ns
(Vo + Vd )
Con il leakage spike si considera generalmente il 30% in più di questo valore
La tensione inversa che deve essere sopportata dal diodo in uscita è:
V pkdiode = V pk
Ns
+ Vo
Np
(18)
Infine il rapporto spire reale che si ottiene vale:
Np
Ns
=
reale
N p int ero
N s int ero
Sezione dei conduttori
La sezione dei fili di rame si impone in modo da suddividere all’incirca in parti eguali le perdite nel
rame e quelle nel ferro. I conduttori si dimensionano, in linea di massima, per una densità di
PrjOfLin.doc
Pag. 9
corrente di 4 A/mm2, considerando la sezione di conduzione reale, diminuita a causa dell’effetto
pelle, e non quella fisica.
Nel calcolo delle perdite di conduzione nel rame bisogna considerare l’effetto pelle e l’effetto
prossimità (Eddy currents), alle frequenze di lavoro, considerando che la forma d’onda è quadra e
non sinusoidale, quindi bisogna tener conto anche di qualche armonica di ordine superiore al primo.
Per correnti superiori a qualche ampère è consigliabile l’uso di fili di Litz, o fogli di rame piatti
(questi ultimi utilizzabili solo se l’avvolgimento è costituito da un massimo di 2 o 3 spire), con
conduttori elementari di diametro inferiore alla profondità di penetrazione alla frequenza di lavoro.
σ =
ρ
πµ 0 µ r f
Bisogna ricordare che la profondità di penetrazione è definita come la distanza dalla superficie al
punto dove la densità di corrente si riduce ad 1/e volte il valore che ha in superficie.
La permeabilità magnetica del vuoto vale:
µ 0 = 4π ⋅ 10 −7
mentre la resistività del rame a 25 °C è pari a:
ρ CU 25 = 2.3 ⋅ 10 −8 Ω ⋅ m
A questo punti si controlla che l’area libera a disposizione dei conduttori nel nucleo prescelto sia
sufficiente per alloggiare gli avvolgimenti. Se non lo è, si deve valutare se è possibile e conveniente
ridurre leggermente la sezione dei conduttori, oppure se è meglio utilizzare un nucleo più grande, e
quindi ripetere tutto il dimensionamento del trasformatore. Bisogna tenere presente che è meglio
non realizzare ogni avvolgimento diviso in più di due semi-avvolgimenti, per non avere un
incremento esponenziale delle perdite. Se si divide ogni avvolgimento in due metà, la disposizione
fisica degli avvolgimenti è obbligatoriamente quella illustrata nella figura seguente e i due
semi-avvolgimenti possono essere sia in serie che in parallelo:
mezzo
secondario
mezzo
secondario
rocchetto
mezzo
primario
mezzo
primario
A causa della fisica che governa il trasformatore bisogna prestare molta attenzione nel suddividere
gli avvolgimenti in vari strati che vengono poi posti in serie, o in parallelo, anche se questo
problema è più sentito in un trasformatore per convertitori di tipo forward (forward, push-pull, half
e full bridge, ecc.) che in un convertitore flyback. Si vedano le note della Unitrode per maggiori
dettagli sull’argomento.
PrjOfLin.doc
Pag. 10
Dimensionamento del condensatore di filtro in ingresso
Il condensatore di filtro in ingresso si dimensione in base al tempo in cui il convertitore deve
continuare a funzionare anche se manca la tensione di alimentazione (tempo di hold—up). Nel caso
dei convertitori off-line questo tempo si pone generalmente pari ad una semionda, vale a dire 10 ms
in Europa e 8.33 ms negli USA.
Negli alimentatori off—line bisogna infine considerare la corrente di ripple che scorre attraverso il
condensatore: essa è elevata, quindi bisogna utilizzare condensatori high ripple. I condensatori, a
causa dell’elevata corrente che devono assorbire ed erogare, devono inoltre essere del tipo da
105 °C.
La strada più comoda da seguire ora è ricavare il valore del condensatore in base alla variazione di
tensione ammessa nel tempo di hold-up. Potremmo anche dimensionare il condensatore in base al
ripple richiesto su in ingresso: in questo caso otterremmo un valore molto inferiore rispetto a quello
necessario per garantire il funzionamento in caso della perdita di una semionda.
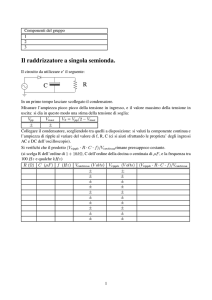
I1
P1
Vi
∆V
+
Vi
Vac
Ci
t
∆t
Introduciamo i seguenti simboli:
Vi : tensione di ingresso (tensione sul primario)
∆t : tempo di hold—up: come si vede dalla figura, esso è leggermente maggiore di un semiperiodo
e mezzo
I 1m : corrente media che scorre nel primario
V1m : tensione media applicata al primario durante il tempo ∆t
P1 : potenza erogata dal primario, pari alla potenza in uscita dal convertitore divisa per l’efficienza
stimata P1 = Po η
Con questi simboli e il disegno riportato sopra siamo in grado di calcolare il valore di C1 .
∆V =
I 1m ∆t
Ci
(19)
Per calcolare I 1m basta fare il bilancio delle potenze tra primario e secondario, utilizzando, per la
tensione sul primario, il suo valore medio durante il tempo ∆t :
V1m =
Vi + (Vi − ∆V ) 2Vi − ∆V
=
2
2
PrjOfLin.doc
Pag. 11
I 1m =
2 P1
P1
=
Vm 2Vi − ∆V
(20)
Risolvendo il sistema costituito dalla (19) e dalla (20) rispetto a C i abbiamo la soluzione cercata:
I 1m ∆t
∆V = C
i
I = 2 P1
1m 2Vi − ∆V
Ci =
(21)
2 P1∆t
∆V (2Vi − ∆V )
Il valore di ∆t , nel caso di perdita di una semionda è pari ad un semiperiodo e mezzo più un altro
po’ di tempo, che si può in prima approssimazione stimare pari ad un angolo compreso fra π 4 e
π 3.
Se invece conosciamo il valore di C i e vogliamo sapere a quanto ammonta il ∆V , allora le (21),
risolte rispetto a ∆V porgono:
∆V =
2Vi C i ±
(2Vi Ci )2 − 8∆tP1Ci
2C i
Conoscendo il valore di ∆V si può calcolare il valore di Vin min da usare nella (3) e seguenti.
Ulteriori passi del progetto
A questo punto mancano ancora i seguenti elementi:
•
rete di retroazione (e relativa stabilizzazione)
•
circuito di bootstrap e circuito ausiliario di alimentazione
•
filtro di uscita
•
protezione dal sovraccarico e dal cortocircuito
Rete di retroazione
Se l’uscita deve essere galvanicamente isolata dall’ingresso, conviene utilizzare un fotoaccoppiatore
per riportare il segnale dall’uscita, posta sul secondario, al controller PWM, posto sul primario. In
questo caso l’amplificatore d’errore, con il relativo riferimento di tensione va posto sul lato
secondario, prima del fotoaccoppiatore. L’amplificatore d’errore più usato è il TL431, perché è
piccolo (il case è un TO92 a 3 pin) e contiene già il riferimento di tensione.
Siccome il fotoaccoppiatore ha in genere una grossa dispersione del CTR (current transfer ratio)
occorre prestare attenzione a stabilizzare la rete di reazione sia col minimo, che col massimo valore
possibile del CTR.
Un altro modo a volte usato per realizzare la rete di retroazione, quando sia necessaria la
separazione galvanica tra ingresso e uscita, consiste nel prelevare il segnale di retroazione da un
avvolgimento ausiliario, isolato dall’uscita (magari lo stesso usato per lo stadio ausiliario di
alimentazione del controller PWM). In questo caso si risparmia il fotoaccoppiatore, con i problemi
connessi, ma, non monitorando direttamente la tensione di uscita, la regolazione è meno buona.
PrjOfLin.doc
Pag. 12
Questo tipo di regolazione è possibile perché il convertitore flyback ha una buona cross regulation
fra i vari secondari.
Per i dettagli sulla realizzazione e stabilizzazione della rete di reazione si rimanda ai testi
specializzati.
Circuito ausiliario di alimentazione
Se la tensione sul primario del convertitore è abbastanza elevata (come valore limite si può dire
25÷30V) ricavare direttamente da essa l’alimentazione per il regolatore PWM l’eventuale
elettronica ausiliaria può condurre ad un’eccessiva potenza dispersa, con conseguente riduzione del
rendimento energetico dell’apparecchio. In questi casi si realizza un avvolgimento secondario
ausiliario sul trasformatore, da cui ricavare l’alimentazione desiderata. Può rendersi necessario
limitare questa tensione con un regolatore lineare.
L’isolamento tra l’avvolgimento ausiliario e il secondario deve avere le stesse caratteristiche di
quello tra primario e secondario, perché esso è direttamente in contatto con il primario: deve avere
le caratteristiche dell’isolamento tra circuiti SELV e circuiti a tensione pericolosa. Invece tra
l’avvolgimento ausiliario e il primario basta avere un isolamento funzionale, anche perché i due
circuiti hanno comunque la massa in comune.
La tensione ausiliaria va raddrizzata con un diodo veloce, perché è alla stessa frequenza di
commutazione del secondario principale. La corrente richiesta è comunque bassa, quindi i diodi
sono piccoli ed economici. La tensione inversa dei diodi si calcola con la (18), mettendo la tensione
di alimentazione ausiliaria al posto di Vo .
La tensione ausiliaria viene in genere posta attorno ai 15 V, perché è con essa che il regolatore
PWM pilota il MOSFET di potenza, ed è questo il valore ottimale per pilotarne il gate.
Circuito di bootstrap
Se si utilizza un avvolgimento ausiliario sul trasformatore per ricavare la tensione di alimentazione
del regolatore PWM sorge un problema: all’accensione il regolatore PWM è spento, quindi non è
presente nemmeno la tensione ausiliaria. Occorre quindi un circuito di bootstrap per far partire il
tutto. Questo circuito deve assorbire pochissima potenza, oppure deve poter essere spento durante il
normale funzionamento del convertitore.
Se invece la tensione a primario è sufficientemente bassa, si può ricavare da essa, mediante un
regolatore lineare di tipo serie, o parallelo (cioè uno zener), la tensione di alimentazione ausiliaria.
Il circuito di bootstrap più semplice, ma utilizzabile solo con circuiti integrati di controllo che
abbiano una notevole isteresi tra tensione di on e tensione di off (tipicamente si accendono con 16 V
e si spengono con 10 V) è il seguente:
PrjOfLin.doc
Pag. 13
+Vpwr
from the auxiliary
winding on the
main transformer
Rb
to the PWM controller
power supply pin
+
Vcc
fast diode
Cb
Introduciamo i seguenti simboli:
VULVOn (Undervoltage lockout On): tensione a cui il controller si accende
VULVOff (Undervoltage lockout Off): tensione a cui il controller si spegne
L’isteresi sull’under voltage lockout è evidentemente pari a:
Vhist = VULVon − VULVOff
All’accensione il condensatore C b , che deve essere piuttosto grande, generalmente dai 47 ai
220 µF, si carica lentamente attraverso la resistenza Rb , connessa al condensatore di ingresso.
Quando la tensione su C b raggiunge il valore VULVOn , il controller PWM parte e assorbe corrente da
C b , mentre la tensione sull’avvolgimento ausiliario cresce. Il tutto deve essere dimensionato in
modo tale che la tensione sull’ausiliario sia superiore a VULVOff prima che quella sul condensatore
C b sia inferiore allo stesso valore, cioè si deve evitare che il controller si spenga. Durante il tempo
in cui il controller PWM sta partendo, la corrente erogata dalla resistenza Rb è molto più piccola
rispetto a quella richiesta dal controller, così nei conti la si trascura. Essa deve essere piccola,
perché è sempre presente durante il funzionamento del convertitore, e rappresenta potenza persa
sulla resistenza Rb , che, tra l’altro, si scalda molto.
Il condensatore C b e la resistenza Rb devono essere dimensionati in modo tale da rispettare i
seguenti vincoli:
•
avere sufficiente riserva di carica per far funzionare il convertitore fintanto che la tensione
ausiliaria abbia raggiunto almeno il valore di VULVOff . Ciò comporta un valore minimo per C b .
•
avere un ritardo accettabile tra il momento in cui il convertitore viene alimentato e quello in cui
effettivamente parte. Esso parte quando la tensione su C b raggiunge il valore VULVOn , con un
ritardo determinato dalla costante di tempo Rb ⋅ C b . Questo ritardo può essere di alcuni secondi
e la sua espressione analitica è: t delay = Rb C b log e
•
V pwr
V pwr − Vcc
.
Anche quando la tensione VCC è inferiore al valore di soglia VULVOn , il controller assorbe un po’
di corrente: la caduta di tensione causata da questa corrente sulla resistenza Rb non deve essere
così elevata da impedire a VCC di raggiungere il valore di soglia. Inoltre, nel calcolo del tempo
PrjOfLin.doc
Pag. 14
di ritardo all’accensione bisogna considerare che questa corrente si sottrae a quella che va a
caricare il condensatore.
•
Non dissipare una potenza eccessiva sulla resistenza Rb , sia perché è potenza che viene
dissipata sempre, anche durante il funzionamento a regime del convertitore, sia per non avere la
resistenza troppo grossa e calda.
Questo schema ha due difetti principali:
1. Non è utilizzabile se Vhist = VULVon − VULVOff è troppo piccola, perché il condensatore si scarica
prima che la tensione ausiliaria abbia raggiunto il valore necessario.
2. Non è utilizzabile se V pwr ha un range di variabilità troppo ampio, perché occorrerebbe far
dissipare troppa potenza alla resistenza Rb .
In questi due casi si possono usare altri schemi, per i quali si rimanda ai testi specializzati. Qui si
vuole solo ricordarne uno:
+Vpwr
Rb
+
Cb
Filtro di uscita
In un convertitore flyback il filtro di uscita è costituito teoricamente solo dal condensatore
necessario ad immagazzinare l’energia ceduta dal trasformatore; energia che viene ceduta al carico
quando il transistor è acceso, e quindi il secondario non eroga energia. Questo condensatore deve
essere del tipo high ripple, perché il ripple di corrente su di esso è elevato, ed anche del tipo da
105 °C, perché viene molto sollecitato termicamente. E’ spesso consigliabile utilizzare più
condensatori uguali in parallelo, per ridurre il ripple di corrente in ognuno di essi, e per ridurre
l’impedenza complessiva. Una cura particolare deve in tal caso essere posta nella realizzazione del
circuito stampato, per evitare che un condensatore sia più sollecitato rispetto agli altri: è necessario
che la lunghezza delle piste dal trasformatore ad ognuno dei condensatori sia la stessa.
Generalmente, in parallelo ai condensatori elettrolitici di filtro, si pone un condensatore al poliestere
da qualche centinaio di nano farad.
Per ridurre ulteriormente il ripple ad alta frequenza presente in uscita, e i disturbi irradiati e
condotti, generalmente si piazza un’induttanza di piccolo valore a monte dei condensatori, seguita
da un piccolo condensatore.
Per i dimensionamento del condensatore di filtro valgono le seguenti considerazioni: il
condensatore immagazzina carica elettrica quando il transistor è spento (il secondario conduce) e la
PrjOfLin.doc
Pag. 15
cede al carico quando il transistor è acceso (il secondario non eroga corrente). Quindi in uscita si
avrà un ripple di tensione alla frequenza di commutazione. Siccome questo ripple è piccolo
(generalmente qualche decina di mV) rispetto alla tensione di uscita, possiamo assumere che la
scarica del condensatore sul carico avvenga secondo una rampa lineare. Così l’equazione solita:
dv(t )
dt
si trasforma in:
ic (t ) = C
ic (t ) = C o
∆Vr
Ton
che è molto più semplice da risolvere. ∆Vr è la tensione di ripple, imposta dal progetto, mentre T è
il tempo in cui il secondario non conduce corrente (il transistor è on), come visto in precedenza.
Quindi il condensatore deve avere un valore pari a:
Co =
I out Ton
∆Vr
Bisogna inoltre considerare il ripple di tensione dovuto alla caduta di tensione causata dal ripple di
corrente sulla resistenza ESR del condensatore.
Protezione dal sovraccarico e dal cortocircuito
In un convertitore flyback con controller di tipo current mode, oppure di tipo voltage mode, ma con
limitazione del picco di corrente, in caso di sovraccarico, o di cortocircuito all’uscita si ha una
limitazione automatica della potenza fornita al carico. Infatti, bisogna ricordare che questo tipo di
convertitore immagazzina nel nucleo del trasformatore energia durante il periodo in cui il transistor
è acceso, per poi trasferirla al secondario quando il transistor è spento. Se si ha una limitazione del
picco di corrente nel transistor, l’energia immagazzinata nel trasformatore, per ogni ciclo, sarà pari
a:
1 2
LI pk
2
Più di questa energia non può quindi essere trasferita al carico e il convertitore funziona quindi a
potenza costante.
Nei controller di tipo current mode più recenti, si ha una circuiteria speciale che si accorge se il
picco di corrente nel transistor è eccessivo, e quindi dovuto ad una condizione anomala
(cortocircuito, o forte sovraccarico): in tal caso il controller viene spento e l’intera sequenza di soft
start è ripetuta. Questo modo di funzionamento è spesso chiamato hic cup mode.
Pcortocircuito =
Note
Esistono alcune variazioni sul tema del convertitore flyback, utilizzate per migliorare questo o
quell’aspetto, ma qui non vengono prese in considerazione. Quella illustrata è la configurazione di
gran lunga più usata.
Il convertitore flyback è universalmente usato negli alimentatori di bassa e bassissima potenza (per
esempio in tutti quegli alimentatorini per i telefoni cellulari, per i rasoi, per i dischi esterni dei
computer tipo gli Iomega, ecc.), dove ha il vantaggio di permettere una facile implementazione di
PrjOfLin.doc
Pag. 16
una tensione di ingresso universale, da 90 a 260 V circa, sia 50 che 60 Hz. È usato in genere fino a
potenze al di sotto del centinaio di watt. Per potenze superiori presenta dei picchi di corrente
all’ingresso elevati, che, oltre ad essere di per sé problematici, causano un notevole livello di
disturbi condotti e irradiati, difficili da filtrare.
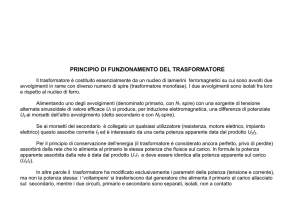
Progettazione di un convertitore forward off-line
Vd
optional
Lo
D1
La
+
+
V2
Co
Ci
+
D2
Ca
Vo
Vi
controller
PWM
Vs
Sotto la denominazione convertitori di tipo forward si cela un’intera schiera di tipologie: in pratica
tutto quello che non è flyback è forward. Le tipologie più importanti appartenenti a questa famiglia
sono:
•
convertitore forward tout court (ad un transistor)
•
convertitore forward a due transistor (una variazione sul tema del forward semplice, che usa
due transistor anziché uno solo, ma sottoposti a tensioni dimezzate)
•
convertitori di tipo push-pull, a loro volta suddivisi in:
• convertitore push pull tout court
• convertitore a mezzo ponte
• convertitore a ponte intero
Caratteristiche comuni a tutta la famiglia
Nello schema della figura precedente si può notare la presenza dell’induttore Lo assieme al diodo di
ricircolo (free wheeeling diode, nella letteratura inglese) D2, per il filtraggio dell’onda quadra in
uscita, come in un normale buck converter. In realtà nei convertitori di tipo push-pull si hanno i due
diodi che hanno contemporaneamente la funzione di raddrizzatore e diodo di ricircolo. Rispetto al
flyback si noti la diversa polarità degli avvolgimenti del trasformatore.
Descrizione generale
Ogni tipologia presenta un particolare mix di vantaggi, svantaggi e caratteristiche peculiari, che la
rendono adatta a diverse circostanze. i convertitori di tipo push pull, usando il trasformatore sia nel
primo che nel terzo quadrante del ciclo d’isteresi, sfruttano meglio il materiale magnetico e non
PrjOfLin.doc
Pag. 17
hanno i problemi di reset che abbiamo visto nel flyback e che ha anche il forward normale, sia a uno
che a due transistor.
B
H
In linea generale si può affermare che il forward a due transistor, e i convertitori a ponte sono più
usati laddove si hanno elevate tensioni sul lato primario (per esempio i 230 V di rete raddrizzati e
livellati), con il primo usato per i livelli di potenza inferiori, il mezzo ponte per potenze intermedie
e il ponte intero per potenze elevate, in genere prossime o superiori ai 1000 W).
Il push pull è utilizzato per potenze elevate, ma con basse tensioni sul lato primario (per esempio
nei convertitori DC/DC di elevata potenza), mentre il forward ad un transistor è utilizzato per
potenze di uscita fino a qualche centinaio di watt.
Principio di funzionamento
Il principio di funzionamento di un convertitore di tipo forward è molto semplice. Il trasformatore si
comporta come un normale trasformatore: quando il transistor conduce si ha trasferimento di
energia al secondario, e quindi si hanno, su di esso, correnti e tensioni che sono legate alle
corrispondenti grandezze sul primario dalle solite relazioni col rapporto spire. Con ovvio significato
dei simboli si ha:
I 2 = I1
N1
N2
V2 = V1
N2
N1
Il trasformatore è tanto più piccolo quanto più la frequenza di lavoro è elevata.
Il filtro LC presente sul secondario estrae il valor medio della tensione presente sul secondario del
trasformatore. Si ha quindi:
N
Vo = δ ⋅ (Vi − Vs ) 2 − Vd
N1
Dove i simboli hanno i seguenti significati:
δ : duty cicle
Vs : tensione di conduzione del transistor
Vd : tensione di conduzione del diodo di uscita
PrjOfLin.doc
Pag. 18
Introduciamo i seguenti altri simboli:
V1 : tensione sul primario
V2 : tensione sul secondario
Vr : tensione di reset
f : frequenza di funzionamento del controller PWM
T : periodo del clock del controller PWM, pari a 1 f
t on : tempo in cui il transistor è acceso
t off : tempo in cui il transistor è spento
t dead : frazione del tempo T non assegnato né a t on , né a t off , ma usato come margine per
compensare tolleranze e approssimazioni di progetto. In genere si pone:
t dead = 20% T
Si ha
T = t on + t off + t dead
In un convertitore forward, il duty cycle massimo deve essere scelto in modo tale da garantire il
reset al trasformatore:
t off ⋅ Vr = t on ⋅ V1
Siccome generalmente si ha
Vr = V1
si ricava che t off è uguale a t on . Quindi il duty cycle massimo è pari al 50%. Se si considera anche
il dead time, si da che il duty cicle massimo è pari al 40%.
Se il duty cycle sale sopra il 50%, il nucleo non ha più il tempo di resettarsi e si sposta verso la
saturazione. Quando si satura non riesce più a reggere la tensione applicata sul primario, e la
corrente sale a valori elevatissimi. Per evitare la distruzione del transistor bisogna utilizzare sistemi
di limitazione della corrente nel transistor: tutti i moderni controller prevedono questa funzionalità.
Per essere sicuri che il nucleo si resetti sempre e comunque si possono utilizzare i regolatori PWM
che limitano il duty cycle massimo al 50%.
Se un duty cycle del 50% è troppo poco per l’applicazione (per esempio perché porta a correnti
troppo elevate) è possibile, variando il numero di spire sull’avvolgimento di reset, lavorare con duty
cycle più elevati, ma in genere non si fa.
In un convertitore push-pull, o a ponte, non serve il tempo per resettare il trasformatore, perché
viene già pilotato in modo da lavorare alternativamente nel 1° e 3° quadrante, passando per lo zero
ad ogni semiciclo. Quindi il duty cycle massimo viene imposto pari a circa l’80%, in modo da avere
un po’ di margine per tolleranze ed approssimazioni nel progetto.
Si può ora passare a calcolare il rapporto spire. Sappiamo che la tensione di uscita è pari al valor
medio della tensione presente sul secondario, cioè:
N
Vo = δ max ⋅ (Vi min − Vs ) 2 − Vd
N1
PrjOfLin.doc
Pag. 19
Il dimensionamento viene effettuato per il duty cycle massimo, corrispondente alla minima tensione
di ingresso. Quando la tensione di ingresso aumenta, il loop di reazione fa in modo che il duty cycle
diminuisca, in modo da mantenere costante la tensione in uscita.
Si ricava immediatamente il valore del rapporto spire
N1
1
=
N 2 Vo
1
+ Vd
δ max
Vimin − Vs
(22)
Dimensionamento del trasformatore
Un trasformatore forward si dimensiona in base alla legge di faraday:
V = ϕ
dove ϕ è il flusso concatenato con le spire.
Chiamando N 1 il numero di spire sul primario, Ae la sezione del nucleo, B l’induzione nel nucleo,
si ha:
ϕ = N 1 Ae B
Quindi abbiamo:
dB(t )
dt
Risolvendo rispetto a B(t) si ha:
V (t ) = N 1 Ae
B(t ) =
1
N 1 Ae
∫ V (t )dt + B(0)
t1
(23)
0
In un convertitore forward si ha il reset del nucleo fra un ciclo e l’altro, quindi:
B(0 ) = 0
Dato che, nel nostro caso, la forma d’onda della tensione è quadra, la (23) diventa:
BMAX =
V1 min t onMAX
(24)
N 1 Ae
Dove
V1 min = Vi min − Vs
Il valore di BMAX è imposto dal tipo di nucleo utilizzato e dalla frequenza di lavoro. Come linee
guida si possono usare i seguenti valori:
Frequenza
Induzione massima
50 kHz o meno
160 mT
100 kHz
120 mT
200 kHz
80 mT
Per frequenze pari o inferiori a 50 kHz, il conto delle perdite ammetterebbe induzioni anche
maggiori di 160 mT. Però è bene limitarsi a tale valore per evitare problemi nei transitori che si
verificano con i bruschi aumenti del carico sul secondario del trasformatore.
PrjOfLin.doc
Pag. 20
A questo punto si procede per tentativi: si sceglie un nucleo in base alle tabelle pubblicate dai
fabbricanti di ferriti, o sui testi specializzati e si vede se il numero di spire che viene fuori va bene,
oppure se è troppo basso (il nucleo non viene sfruttato, e si può sceglierne uno più piccolo), o se è
troppo alto, e non si possono alloggiare tutte le spire. Dalla (24) abbiamo:
N1 =
V1min tonMAX
(25)
BMAX Ae
Il valore ottenuto dall’equazione precedente è il minimo numero di spire che il primario deve
possedere. Se si mettono meno spire si ottiene un’induzione maggiore, uno spostamento maggiore
verso la saturazione, e un maggiore riscaldamento del nucleo.
Dalla (22) abbiamo immediatamente il numero di spire sul secondario:
V
1
N 2 min = N 1 o + Vd
δ max
Vimin − Vs
Il valore ottenuto dalla precedente equazione è il numero minimo di spire a secondario. Se si usano
meno spire, si raggiunge il duty cicle massimo per un valore della tensione di ingresso superiore al
valore minimo stabilito, quindi a bassa tensione il convertitore non funziona più.
In un convertitore push-pull, o a ponte, non si ha il reset ad ogni ciclo, però B(t) ha valor medio
nullo e cambia segno ad ogni semiciclo: passando da + BMAX a − BMAX , quindi si può usare ancora
la (24), sapendo che ora il valore di induzione tollerabile dal nucleo è pari a due volte BMAX , perché
non è il valore assoluto di induzione, ma il delta tra un semiciclo e il successivo:
B
+Bmax
H
-Bmax
Nel trasformatore forward non è, in generale, necessario aggiungere un traferro, perché quando il
primario conduce, conduce anche il secondario, portando così alla cancellazione reciproca dei
flussi: non si ha quindi la saturazione del nucleo. L’unico flusso non cancellato che rimane nel
nucleo è quello di magnetizzazione, dovuto all’induttanza del primario.
Sezione dei conduttori
Per il dimensionamento della sezione dei conduttori vale quanto detto a proposito del flyback, a cui
perciò si riamanda.
Dimensionamento del condensatore di filtro in ingresso
Il condensatore di filtro in ingresso si dimensiona in base alle medesime considerazioni già esposte
per il convertitore flyback, a cui perciò si rimanda.
PrjOfLin.doc
Pag. 21
Filtro di uscita
Il filtro di uscita è costituito da un induttore Lo e da un condensatore C o . L’induttore Lo si
dimensiona in base al ripple di corrente desiderato. in genere si impone un ripple di corrente
picco—picco pari a ±20% del valore nominale della corrente in uscita.
Io (media)
Toff
∆ I Lpp
Ton
∆I opp = 20% I o
Sappiamo che la corrente in un induttore è data da:
t
1 1
i L = ∫ v L (t )dt + I 0
L t0
Nel nostro caso, dato che la tensione di uscita è, a meno del ripple, costante, e pure la tensione di
ingresso è costante (a meno delle perdite nel trasformatore), durante il tempo Ton si ha:
v L (t ) = cost = V2 − Vo − Vd
quindi:
V − Vo − Vd
i Lo (t ) = 2
⋅ t + I L0
Lo
∆I Lpp =
t on
o
V2 − Vo − Vd
⋅ t on
Lo
Quindi il valore di Lo sarà dato da:
Lo =
V 2 − Vo − Vd
⋅ t on
∆I Lpp
(26)
Nell’equazione precedente bisogna prendere i vari parametri nella stessa situazione; conviene
prendere il valore minimo di V2 a cui corrisponde il valore massimo di t on .
A differenza del convertitore flyback, il condensatore serve solo per filtrare il valor medio,
l’elemento che immagazzina l’energia è l’induttore. Il condensatore non viene dimensionato in base
al valore di capacità necessario per filtrare, che è molto basso, ma in base al valore desiderato per
l’ESR. L’ESR desiderata si calcola in base al ripple di tensione causato dal ripple di corrente sul
condensatore. Il condensatore deve quindi avere un valore di ESR estremamente basso ed essere del
tipo da 105 °C, perché scalda molto. Generalmente il dimensionamento risulta in 50÷150 µF per
ogni ampère di corrente in uscita, a seconda del ripple desiderato e del tipo di condensatore usato.
PrjOfLin.doc
Pag. 22
Dopo il filtro LC principale si usa in genere aggiungere un altro gruppo LC, con l’induttore La
molto più piccolo di Lo , per ridurre ulteriormente il ripple e il rumore in alta frequenza. Non è
necessario che il condensatore C a sia del tipo da 105 °C, e nemmeno a basso ESR.
Ulteriori passi di progetto
A questo punto mancano ancora i seguenti elementi:
•
rete di retroazione (e relativa stabilizzazione)
•
circuito di bootstrap e circuito ausiliario di alimentazione
•
protezione dal sovraccarico e dal cortocircuito
Rete di retroazione
Valgono le medesime considerazioni fatte per il flyback
Circuito di bootstrap
Valgono le stesse considerazione fatte a proposito del flyback
Circuito ausiliario di alimentazione
Valgono le stesse considerazioni fatte per il flyback, con un’aggiunta.
Siccome nel convertitore forward c’è il gruppo LC a valle del trasformatore, si ha una maggiore
variazione della tensione sull’avvolgimento ausiliario, al variare del carico, quindi può essere più
frequentemente richiesto un regolatore lineare per l’alimentazione ausiliaria: in ogni caso non si
mette certo un gruppo LC anche su questa sezione.
Protezione dal sovraccarico e dal cortocircuito
Sia con un regolatore di tipo current mode, con con uno di tipo voltage mode, ma con limitazione
del picco di corrente, si ottiene una limitazione sul picco massimo di corrente sul primario, quindi
anche sul secondario, dato che le due correnti sono legate dal rapporto spire.
Nei controller di tipo current mode più recenti, si ha una circuiteria speciale che si accorge se il
picco di corrente nel transistor è eccessivo, e quindi dovuto ad una condizione anomala
(cortocircuito, o forte sovraccarico): in tal caso il controller viene spento e l’intera sequenza di soft
start è ripetuta. Questo modo di funzionamento è spesso chiamato hiccup mode.
Protezione contro l’apertura del circuito di feedback (sovratensione in uscita)
Per proteggere il circuito dalle sovratensioni che si avrebbero in uscita nel caso in cui si aprisse )a
causa di un guasto) l’anello di reazione (per esempio per rottura del fotoaccoppiatore) si può, per
esempio, operare in uno dei due modi seguenti:
1. Si aggiunge un fotoaccoppiatore in uscita che viene attivato solo se la tensione di uscita supera
un certo valore. Esso pilota un SCR sul primario, che toglie l’alimentazione al controller PWM
oppure agisce su un pin di shut-down.
2. Si monitora la tensione sull’avvolgimento ausiliario (essendo già sul lato primario non è
necessario aggiungere un fotoaccoppiatore) e se supera un determinato valore, si spegne il
controller PWM, togliendogli alimentazione con un SCR oppure agendo su un pin di shut-down,
PrjOfLin.doc
Pag. 23
se presente. Si può monitorare sia la tensione di picco che il valore già filtrato usato per
alimentare i circuiti a primario.
Convertitore forward a due transistor
Vd
high
side
driver
optional
Lo
+
La
D1
Ci
+
Vi
V2
Co
controller
PWM
+
D2
Ca
Vo
Vs
Rispetto al forward semplice cambiano due cose:
•
I due transistor devono sopportare ognuno una tensione pari alla metà di quella che dovrebbero
sopportare in un forward semplice. Lo scotto da pagare per questo vantaggio è, oltre ovviamente
all’avere due transitor (però più economici), la necessità di prevedere una circuiteria di high side
driving per uno dei due transistor: bisogna usare un trasformatore, oppure un integrato fatto
apposta per questo scopo, come l’IR2110 della International Rectifier.
•
Ognuno dei due transistor deve sopportare metà tensione rispetto al forward normale, ma la
corrente che vi scorre non cambia.
•
Si noti che i transistor sono o entrambi accesi, o entrambi spenti, diversamente che in un pushpull dove sono pilotati alternativamente.
•
Non è più necessario aggiungere l’avvolgimento di reset, perché tale funzione è assolta dai due
diodi aggiunti sul primario.
•
I due diodi aggiunti sul primario fanno anche in modo da ridurre notevolmente il picco di
tensione (spike) allo spegnimento dei transistor.
•
Siccome la tensione sul primario è la stessa che si ha nel convertitore forward semplice, il
dimensionamento del trasformatore non cambia rispetto a questo.
PrjOfLin.doc
Pag. 24
Convertitore push-pull
Vd
optional
Lo
La
D1
+
Ci
V2
Q2
Vi
Co
controller
PWM
Q1
+
Ca
+
Vo
D2
Vs
•
Si hanno sia il primario che il secondario a presa centrale. Il secondario è a presa centrale perché
vengono sfruttate sia una semionda positiva, che una negativa, da raddrizzare entrambe.
•
I due diodi sul secondario agiscono sia da raddrizzatori che da diodo di ricircolo (free weeling
diode).
•
Si hanno due transistor, pilotati a fasi alterne (sfasate di 180°), quindi il controller è più
complicato rispetto a quello di un forward.
•
I transistor hanno entrambi il source a massa, quindi il loro pilotaggio è semplice.
•
I transistor devono sopportare entrambi una tensione pari a 2Vi. Ciò si vede chiaramente
osservando che, avendo i due semi-primari lo stesso numero di spire, quando un transistor è on,
l’altro deve sopportare una tensione pari a Vi più la tensione indotta sulla sua parte di primario,
che è ancora pari a Vi. Inoltre si hanno notevoli spike di tensione al passaggio da on a off.
•
Il trasformatore viene pilotato sia nel primo che nel terzo quadrante del suo ciclo di isteresi, così
il flusso sopportabile è il doppio rispetto a quello che si ha in un forward. Inoltre non c’è il
problema di dover avere un tempo per garantire il reset del trasformatore, perché il
funzionamento prevede appunto che la tensione applicata crei un flusso prima in un senso e poi
in un altro, quindi il duty cicle può avvicinarsi molto al 100% (il duty cicle nominale viene
generalmente tenuto intorno all’80%, cioè il 40% del periodo è a on Q1 e il 40% è on Q2).
•
Siccome il duty cycle è il doppio rispetto ad un forward, la corrente di picco, sia a primario che
a secondario, è dimezzata rispetto a questo (si riduce anche il valore rms), permettendo di usare
transistor più economici e di ridurre i disturbi emessi.
•
Siccome il reset del nucleo è affidato all’avere sia i tempi di on dei due transistor uguali che i
due semi primari uguali, c’è la possibilità che leggere asimmetrie in questi parametri creino il
fenomeno del flux walking per cui il flusso comincia a spostarsi in su o in giù nel ciclo di
isteresi, fino a ssaturare il nucleo con la conseguente distruzione dei transistor. Un rimedio a
questo problema è traferrare il nucleo. Anche in questo caso rimane però la possibilità, meno
probabile di prima, che si verifichi il fenomeno del flux walking. La soluzione definitiva a queto
problema è usare un controllo di tipo current mode, perché, se il flusso inizia a sbilanciarsi
PrjOfLin.doc
Pag. 25
rispetto allo zero, si ha un aumento di corrente in uno dei due transistor, ed i controllo in
corrente automaticamente accorcia il tempo di on, e il flusso ritorna ad essere simmetrico
rispetto allo zero.
Convertitore a mezzo ponte
Vd
Vi/2
+ Ci1
high side
driver
optional
Lo
Q2
D1
La
V2
Cf
Co
+
+
Ca
+
Vo
Ci2
Vi/2
Q1
controller
PWM
D2
NB: Col mezzo ponte il controllo in current mode può essere utilizzato solo se la divisione a metà
della tensione di alimentazione è fatta con un sistema hard, non se è fatta con un sistema soft
(partitore capacitivo, con le resistenze di compensazione), come è usuale quando si lavora con la
tensione europea di 230 V (è la situazione illustrata nella figura precedente). Evidentemente ciò non
è possibile nemmeno se l’ingresso è in continua. Un valido sistema hard per la divisione in due
della tensione di alimentazione è utilizzare un duplicatore di tensione utilizzando il punto di
connessione dei due condensatori come punto centrale1. Questo metodo è però possibile solo con
tensioni di ingresso in alternata di valori non troppo elevati: per esempio i 115 V in uso in America.
Per il motivo si veda Unitrode Magnetics Topics SEM1200, Section 4.7 per una discussione
dettagliata. Il metodo suggerito poi nell’Application Note Unitrode U111 non funziona molto bene.
•
1
Il condensatore Cf serve per evitare che nel primario scorra una corrente continua, o, il che è lo
stesso, per evitare il fenomeno del flux walking che porterebbe alla distruzione dei transistor per
Quello che segue è un esempio di realizzazione di due tensioni continue identiche, a partire da un ingresso in alternata,
tipicamente usato con ingresso 115 V 60 Hz.
Qui non sono necessarie le resitenze in parallelo ai condensatori Ci1 e Ci2, perché il circuito è il classico duplicatore di
tensione, di cui viene sfruttata anche la tensione intermedia.
+
Vac
Cf
+
PrjOfLin.doc
Pag. 26
saturazione del nucleo. Esso va dimensionato in modo da avere una caduta di tensione piccola
rispetta all Vi.
•
Ovviamente in parallelo ai condensatori Ci1 e Ci2 vanno messe due resistenze adeguate,
altrimenti la partizione della tensione di ingresso sui due condensatori non è determinata dalla
loro capacità ma dalla resistenza parassita di perdita. Anche in parallelo a Cf può essere utile
aggiungere una resistenza.
•
I due diodi sul secondario agiscono sia da raddrizzatori che da diodo di ricircolo (free weeling
diode).
•
Il secondario è a presa centrale, perché vengono sfruttate sia una semionda positiva, che una
negativa, da raddrizzare entrambe.
•
Si può notare come i due transistor siano pilotati con due segnali sfasati di 180°, quindi il
controller è più complicato rispetto a quello di un forward.
•
Il mosfet Q2 non ha il source a massa, quindi, al contrario del push-pull, è necessario un circuito
di high side driving: bisogna usare un trasformatore, oppure un integrato fatto apposta per
questo scopo, come l’IR2110 della International Rectifier.
•
I due diodi in parallelo ai transistor eliminano il problema degli spike di tensione che penalizza
il push pull, soprattutto nel caso la tensione sul primario sia molto elevata.
•
La tensione che i transistor devono sopportare è pari a Vi, e non a 2 Vi come nel push-pull.
•
La tensione applicata sul primario è pari a Vi/2, e non a Vi. Il flusso sopportabile, siccome si
lavora sull’intero ciclo di isteresi, è doppio rispetto ad un convertitore forward, così il numero di
spire sul primario è pari ad ¼ rispetto ad un forward.
•
Siccome sul trasformatore vengono applicati impulsi di tensione di entrambe le polarità (si
lavora sul primo e terzo quadrante del ciclo di isteresi) non si hanno problemi per il reset del
trasformatore, tranne quanto segnalato nella nota iniziale.
PrjOfLin.doc
Pag. 27
Appendice A
Fili di Litz
Un filo di Litz è un cavo costituito da numerosi fili elementari isolati tra di loro (sono smaltati) e
ritorti in modo tale che ogni filo abbia la stessa percentuale di lunghezza di tutti gli altri nello strato
più esterno, in quello più interno, e in tutti gli strati intermedi. Il cavo costituito da più fili
elementari serve per annullare l’effetto pelle, se il diametro del filo elementare è inferiore alla
profondità di penetrazione:
σ =
ρ
πµ 0 µ r f
Se il diametro del filo elementare è maggiore della profondità di penetrazione, l’effetto pelle è
comunque ridotto.
Se i fili elementari fossero solamente uniti in un mazzo, si avrebbe comunque che quelli più interni
partecipano meno, o no partecipano del tutto, alla conduzione: è un’altra faccia del solito effetto
pelle. Ecco allora che, ad alte frequenze, sorge la necessità di utilizzare i fili di Litz. Bisogna
prestare particolare attenzione al fatto che tutti i fili elementari siano ben saldati assieme ad ognuna
delle due estremità del cavo, per evitare di emettere grossi disturbi.
Dettagli sulla fabbricazione
I fili di Litz li fa la Oleari di Rho, sita via del Gerolo. Contattare L’ing. Oleari. Vengono prodotti su
specifica del cliente.
I diametri dei fili elementari usati sono i seguenti
0.04 mm
0.05 mm
0.07 mm
0.10 mm
0.15 mm
0.18 mm
0.20 mm
0.25 mm
I fili possono essere in rame smaltato classe F (155 °C)
L’isolamento globale può essere in mylar (-40 °C÷+150 °C, classe B abbondante). Possono usare
anche il Nomex, che è in classe F (e anche V0 per l’infiammabilità), però costa 10 volte tanto ed è
più rigido.
PrjOfLin.doc
Pag. 28
Il diametro esterno del filo risultante è (formula conservativa, in genere viene un po’ più piccolo):
d = α ⋅ N fili ⋅ d filo smaltato + d isolamento esterno
α = 1.25 ÷ 1.28
Il mylar usato ha uno spessore di 12 µm, così lo spessore dell’isolamento esterno viene 45÷48 µm.
Lo spessore della smaltatura è di circa 0.01 mm sui fili più piccoli, 0.012 su diametri maggiori ecc.
PrjOfLin.doc
Pag. 29
Appendice B
Induttori toroidali: calcolo e note varie
Calcolo
I costruttori forniscono il parametro L1000, che è l’induttanza di una bobina realizzata avvolgendo
1000 spire su quel nucleo, misurata in mH.
L’induttanza per un dato numero di spire n è allora:
L1000 N 2
Ln =
10 6
mH
L1000 N 2
H
10 9
Se si vuole calcolare l’induttanza di una bobina toroidale in base ai parametri geometrici allora è:
Ln =
4π ⋅ 10 −7 µ r N 2 Ae
L=
le
H
Dove Ae è l’area della sezione trasversale del toroide e le è la lunghezza della circonferenza media
del toroide. Entrambi i parametri sono forniti dal costruttore.
Note varie
I nuclei per induttori toroidali vengono costruiti con polveri di materiali ferromagnetici mischiati a
resine. Le resine servono sia per tenere legato l’impasto, che per realizzare un traferro distribuito,
evitando così di dover realizzare un taglio trasversale nel nucleo per aumentarne il valore di
saturazione, con i problemi di flusso disperso che ciò comporta. Variando la percentuale di polveri
ferrose e di resine nell’impasto si ottengono materiali con permeabilità e flussi di saturazione
differenti: più è alta la permeabilità, più è basso il flusso di saturazione.
C’è da tener presente che la permeabilità di questi nuclei è fortemente influenzata dal flusso
continuo presente (DC bias). Il costruttore fornisce le curve per calcolare la variazione di
permeabilità, e quindi di valore di induttanza, in funzione del DC bias. Gli induttori si progettano in
modo che abbiano il valore di induttanza nominale alla corrente (DC bias) nominale, e che
l’induttanza a carico nominale sia inferiore rispetto a quella a vuoto di un valore compreso tra il
20% e il 50% (cioè il valore a vuoto sia compreso fra il 125% e il 200% del valore a carico
nominale).
Per gli induttori utilizzati nel filtro sul secondario del trasformatore degli alimentatore switching (o
come induttore in un convertitore di tipo buck) in questo modo si ottiene una riduzione del ripple di
corrente in uscita a basso carico.
I nuclei toroidali si dividono in tre grandi famiglie:
1. Polvere di ferro (iron powder)
2. Molypermalloy
3. Kool-Mµ
PrjOfLin.doc
Pag. 30
Il confronto delle caratteristiche dei tre tipi di nucleo è il seguente:
1. I nuclei in polvere di ferro sono i più economici, ma anche quelli con le perdite maggiori. Non
vanno bene per frequenze di commutazione superiori ai 50÷70 KHz, specie se la corrente è
elevata.
2. I nuclei in Molypermalloy sono i più pregiati, con perdite basse, ma prezzi elevati.
3. I nuclei in Kool-Mµ (prodotti solo dalla Magnetics) hanno caratteristiche e prezzo intermedi fra
i due precedenti e sono caratterizzati da un alto flusso di saturazione.
I nuclei più utilizzati sono quelli con il valore di µr compreso tra 60 e 125. La Magnetics produce
tutte e tre le serie di nuclei nelle stesse dimensioni e con gli stessi valori di permeabilità relativa,
cambia quindi solo il materiale. Siccome il Kool-Mµ ha una saturazione più elevata rispetto alla
polvere di ferro è possibile che, per realizzare un certo induttore, il nucleo Kool-Mµ sia più piccolo
rispetto al nucleo in polvere di ferro.
Produttori e distributori di nuclei toroidali
Produttore: Magnetics Inc.
PrjOfLin.doc
Distributore: BFI Ibexa
tel: 02 31 91 101
Contatto:
Sig. Verdelli interno: 02 31 91 10 25
Pag. 31
Appendice C
Costanti Fisiche
µ 0 = 4π ⋅ 10 −7
ρ rame 25°C = 2.3 ⋅ 10 −8 Ω ⋅ m
PrjOfLin.doc
Pag. 32
Appendice D
Tabella delle sezioni AWG
AWG
IEC Diameter (R20)
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
PrjOfLin.doc
3.15
2.8
2.5
2.24
2
1.8
1.6
1.4
1.25
1.12
1
0.9
0.8
0.71
0.63
0.56
0.5
0.45
0.4
0.355
0.315
0.28
0.25
0.224
0.2
0.18
0.16
0.14
0.125
0.112
0.1
0.09
0.08
0.07
0.063
0.056
0.05
0.045
0.04
0.0355
0.0315
0.028
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
Overall diameter
3.34
2.98
2.72
2.431
2.172
1.943
1.737
1.711
1.389
1.247
1.118
1.003
0.897
0.805
0.721
0.65
0.582
0.523
0.467
0.419
0.376
0.34
0.305
0.274
0.249
0.216
0.1905
0.1702
0.1524
0.1397
0.1245
0.1092
0.0965
0.0864
0.0762
0.0686
0.0635
0.0546
0.0498
0.0452
0.0394
0.0353
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
mm
Wire Area
7.793
6.158
4.909
3.941
3.142
2.545
2.011
1.539
1.227
0.985
0.785
0.636
0.503
0.396
0.312
0.246
0.196
0.159
0.126
0.0990
0.0779
0.0616
0.0491
0.0394
0.0314
0.0254
0.0201
0.0154
0.0123
0.00985
0.00785
0.00636
0.00503
0.00385
0.00312
0.00246
0.00196
0.00159
0.00126
0.00099
0.00078
0.00062
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
mm2
Current capacity
@ 4A/mm2
31.17
24.63
19.63
15.76
12.57
10.18
8.04
6.16
4.91
3.94
3.14
2.54
2.01
1.58
1.25
0.985
0.785
0.636
0.503
0.396
0.312
0.246
0.196
0.158
0.126
0.102
8.042E-02
6.158E-02
4.909E-02
3.941E-02
3.142E-02
2.545E-02
2.011E-02
1.539E-02
1.247E-02
9.852E-03
7.854E-03
6.362E-03
5.027E-03
3.959E-03
3.117E-03
2.463E-03
Pag. 33