Modellazione e Analisi di Reti Elettriche
1
Modellazione e Analisi di Reti Elettriche
Davide Giglio
1 Introduzione alle Reti Elettriche
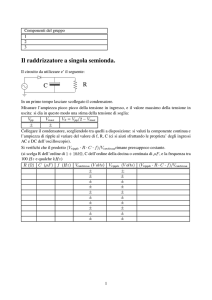
Le reti elettriche costituite da resistori, condensatori e induttori (bipoli), con resistenza R, capacità
C e induttanza L costanti, sono un tipico esempio di sistema dinamico lineare tempo invariante.
Per potere definire le equazioni di stato di una rete elettrica è necessario partire dalle leggi di
funzionamento dei tre componenti illustrati nella seguente figura (a sinistra un resistore, al centro
un condensatore e a destra un resistore), dove con v e i sono indicate le tensioni e le correnti.
i(t)
R
i(t)
v(t)
C
i(t)
v(t)
L
v(t)
Il resistore è caratterizzato da una tensione ai morsetti del componente che è proporzionale alla
corrente che scorre all’interno del componente stesso. La sua legge elementare è:
v(t) = R i(t)
Il condensatore è caratterizzato da una corrente che scorre all’interno del componente che è
proporzionale alla derivata della tensione ai morsetti del componente stesso. Si ha quindi:
i(t) = C
d
v(t)
dt
L’induttore è caratterizzato da una tensione ai morsetti del componente che è proporzionale alla
derivata della corrente che scorre all’interno del componente stesso, ovvero:
v(t) = L
d
i(t)
dt
In generale, nelle reti elettriche costituite dai tre bipoli sopra descritti, lo stato del sistema è rappresentato dalle tensioni ai morsetti dei condensatori e dalle correnti che scorrono all’interno degli
induttori. Dal punto di vista fisico infatti, lo stato del sistema è rappresentato dalle grandezze
che definiscono l’energia (potenziale) che viene immagazzinata in un circuito elettrico; nei circuiti
elettrici costituiti da resistori, condensatori e induttori, l’energia viene immagazzinata nei condensatori (econdensatore (t) = 21 C v(t)2 ) e negli induttori (einduttore (t) = 21 L i(t)2 ). Le equazioni di stato
possono essere ricavate in maniera sistematica a partire dalle leggi fondamentali e sfruttando il
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
2
fatto che le somme delle correnti entranti in un nodo sono nulle (prima legge di Kirchoff – equazione ai nodi) e le somme delle tensioni lungo una maglia sono nulle (seconda legge di Kirchoff –
equazione alle maglie). Essendo le variabili di stato relative ai condensatori e agli induttori (che
rappresentano gli elementi reattivi del sistema), l’ordine del sistema è uguale al numero di tali
elementi presenti nella rete.
Una rete elettrica può essere alimentata in tensione o in corrente. Con riferimento alla figura
seguente, a sinistra vi è la schematizzazione di un generatore di tensione e a destra quella di un
generatore di corrente. Il generatore di tensione e il generatore di corrente sono due generatori
indipendenti ovvero il primo fornisce una certa tensione qualsiasi sia la corrente erogata mentre il
secondo fornisce una certa corrente qualsiasi sia la tensione ai suoi capi. La tensione o la corrente
rappresentano quindi l’ingresso del sistema. Il tipo di generatore da utilizzare (di tensione o di
corrente) dipende dalla tipologia della rete e, in particolare, dalla presenza di bipoli in serie o in
parallelo.
i(t)
v(t)
In genere, le tensioni e le correnti generate e poste in ingresso alla rete elettrica possono essere
continue oppure alternate: nel primo caso avremo in ingresso un segnale costante (gradino) mentre
nel secondo caso un segnale sinusoidale (in certi casi si esplicita il fatto di essere in tensione o
corrente alternata mettendo il simbolo sinusoidale nella schematizzazione del generatore e, più
precisamente, all’interno del cerchio). E’ comunque possibile mettere in ingresso anche altri tipi di
segnale, ad esempio un’onda quadra.
Le reti elettriche più semplici sono quelle costituite da due bipoli, di cui almeno uno reattivo. Si
hanno pertanto i circuiti RC, RL e LC. I primi due vengono descritti da equazioni di stato del
primo ordine mentre gli ultimi da equazioni del secondo ordine.
2 Circuiti RC
vR (t)
R
u(t)
Davide Giglio
iR (t)
C
u(t)
R
iC (t)
C
vC (t)
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
3
Nella figura precedente è illustrato un circuito RC in serie. Tale rete elettrica può essere rappresentata come un sistema LTI di primo ordine la cui variabile di stato è la tensione ai capi del
condensatore. Per ottenere l’equazione di stato si applica la seconda legge di Kirchoff all’unica
maglia presente nella rete.
A tale proposito, siano u(t) la tensione in ingresso alla rete (il circuito RC serie è alimentato da un
generatore di tensione ovvero è pilotato in tensione), vR (t) e vC (t) le tensioni ai capi del resistore e
del condensatore, iR (t) e iC (t) le correnti che scorrono all’interno del resistore e del condensatore
(si veda la figura precedente, a destra).
La corrente all’interno dei componenti della stessa maglia è uguale. Si ha quindi:
iR (t) = iC (t) = i(t)
Per quanto riguarda invece le tensioni, la seconda legge di Kirchoff fornisce:
u(t) = vR (t) + vC (t) =
= R i(t) + vC (t) =
d
= RC
vC (t) + vC (t)
dt
L’equazione di stato del sistema è pertanto:
1
1
d
vC (t) = −
vC (t) +
u(t)
dt
RC
RC
Ipotizzando come uscita la tensione ai capi del condensatore si ottiene:
v ′ (t) = − 1 v (t) + 1 u(t)
C
C
RC
RC
y(t) = vC (t)
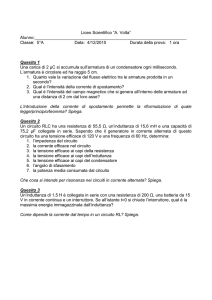
Valutiamo il comportamento del sistema attraverso Matlab e Simulink. La figura seguente (a
sinistra) illustra la risposta al gradino, ipotizzando R = 5 Ohm e C = 2 Farad, e una tensione di
ingresso costante pari a V in = 1 Volt (cioè u(t) = 1(t)).
vC(t)
i(t)
1
1
0.9
0.9
0.8
0.8
0.7
0.7
0.6
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
0
10
20
30
40
50
60
0
0
10
20
30
40
50
60
Da questa figura si vede come la tensione ai capi del condensatore. inizialmente nulla, aumenti fino
a tendere al valore 1 Volt. Il significato fisico di questo comportamento è il processo di carica del
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
4
condensatore (tutte le cariche che inizialmente fluiscono all’interno della rete rimangono “intrappolate” tra le facce del condensatore). Questo comportamento può essere verificato analiticamente
attraverso la determinazione della funzione di trasferimento del sistema e quindi dell’uscita. La
funzione di trasferimento è:
1
1
T (s) = 1 ·
= RC
·
1
1
RC
s+
s+
RC
RC
1
Supponendo che il segnale d’ingresso costante abbia un ampiezza pari a V in , l’uscita del sistema è:
1
V in
in
V
Y (s) = T (s) U (s) = RC ·
= RC 1
1
s
s+
s s+
RC
RC
che, antitrasformata, diventa la seguente funzione nel tempo:
1
y(t) = vC (t) = V in 1(t) − e− RC t
Tale funzione corrisponde (quando V in = 1) alla curva illustrata nella precedente figura. L’uscita
del sistema y(t), derivata e moltiplicata per la costante C, fornisce l’andamento della corrente nel
circuito al variare del tempo. Analiticamente si ottiene:
i(t) = C
V in − 1 t
d
1 − 1 t
y(t) = C V in
e RC =
e RC
dt
RC
R
che corrisponde (quando V in = 1) al segnale illustrato nella figura precedente a destra. Come si
può vedere, la corrente, inizialmente non nulla, con il passare del tempo tende a 0 a causa delle
cariche che non possono più fluire rimanendo bloccate all’interno del condensatore.
Il circuito RC presentato può essere modellato in Simulink attraverso il seguente diagramma a
blocchi:
u(t)
1/(R*C)
vC'(t)
1
s
vC(t)
y(t)
1/(R*C)
Attraverso questo diagramma a blocchi valutiamo il comportamento del circuito RC in presenza
di un segnale in ingresso sinusoidale (sistema pilotato in tensione alternata) e in presenza di un
onda quadra in ingresso.
Nella figura seguente sono illustrati l’ingresso e l’uscita del sistema nel caso di segnale in ingresso
sinusoidale con con frequenza ω = 0.5 rad
sec . Come si può vedere, passato un certo periodo di
transitorio, il segnale in uscita è una sinusoide di ampiezza minore. L’effetto di un sistema di
questo tipo è una attenuazione del segnale in ingresso.
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
5
u(t)
y(t)
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
−0.8
−1
−1
0
20
40
60
80
100
120
140
160
0
20
40
60
80
100
120
140
160
Se però mettiamo in ingresso un segnale sinusoidale con frequenza più bassa (ad esempio ω =
0.1 rad
sec , il segnale di uscita risulta meno attenuato, come si può vedere nella figura seguente
u(t)
y(t)
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
−0.8
−1
−1
0
20
40
60
80
100
120
140
160
0
20
40
60
80
100
120
140
160
E’ possibile verificare analiticamente questo comportamento attraverso il calcolo della risposta in
frequenza del sistema, ovvero del comportamento a regime del sistema quando è pilotato da un
ingresso sinusoidale. Sia sin ωt il segnale in ingresso. L’uscita del sistema a regime è pari a:
yr (t) = A sin(ωt + ϕ)
dove A e ϕ sono rispettivamente il modulo e la fase di T (jω).
Si ha:
1
jω −
1
RCω
RC
= 2 2 2
−j 2 2 2
=
T (jω) =
1
1
R C ω +1
R C ω +1
jω +
−ω 2 − 2 2
RC
R C
s
√
1
R2 C 2 ω 2 + 1
R2 C 2 ω 2
A=
+
=
R2 C 2 ω 2 + 1
(R2 C 2 ω 2 + 1)2
(R2 C 2 ω 2 + 1)2
RCω
− 2 2 2
ϕ = arctan R C ω + 1 = − arctan (RCω)
1
1
RC
1
RC
R2 C 2 ω 2 + 1
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
6
L’uscita del sistema a regime è quindi:
√
R2 C 2 ω 2 + 1
sin (ωt − arctan (RCω))
yr (t) =
R2 C 2 ω 2 + 1
Rispetto all’ingresso, l’uscita del sistema è sfasata verso destra
di una quantità pari ad arctan (RCω)
√
R2 C 2 ω 2 +1
e presenta una attenuazione in quanto è evidente che R2 C 2 ω2 +1 = √R2 C12 ω2 +1 < 1. A tale proposito, si può inoltre osservare che l’attenuazione è tanto più forte quanto più è alta la frequenza
ω del segnale in ingresso, mentre per valori bassi di ω l’uscita non viene attenuata più di tanto
(ovviamente hanno influenza anche i valori di R e C). Questo è il tipico comportamento di un
filtro “passa-basso” (di primo ordine) ovvero un sistema che “taglia” le alte frequenze e “lascia
passare” le basse frequenze.
I filtri dei segnali sono molto importanti in quanto consentono di “pulire” il segnale da frequenze
indesiderate (ad esempio, rumori e disturbi che agiscono a determinate frequenze). Il circuito RC
può fungere anche da filtro “passa-alto” (di primo ordine), che “taglia” le basse frequenze e “lascia
passare” le alte frequenze. Per fare ciò è necessario considerare come uscita la tensione ai capi del
resistore vR (t). Ricordando che u(t) = vR (t) + vC (t), il sistema LTI diventa:
v ′ (t) = − 1 v (t) + 1 u(t)
C
C
RC
RC
y(t) = −vC (t) + u(t)
La funzione di trasferimento di questo sistema è:
1
1
s
RC
+1=1−
·
=
T (s) = −1 ·
1
1
1
RC
s+
s+
s+
RC
RC
RC
1
La risposta in frequenza, ovvero il valore del segnale di uscita a regime a fronte di un ingresso
sinusoidale sin ωt, è:
√
RCω R2 C 2 ω 2 + 1
1
yr (t) =
sin
ωt
+
arctan
R2 C 2 ω 2 + 1
RCω
essendo:
1
ω
jω jω −
−ω 2 − j
RCω
R2 C 2 ω 2
jω
RC
RC
+j 2 2 2
=
= 2 2 2
T (jω) =
=
1
1
1
R C ω +1
R C ω +1
jω +
−ω 2 − 2 2
−ω 2 − 2 2
RC
R C
R C
s
√
R2 C 2 ω 2
RCω R2 C 2 ω 2 + 1
R4 C 4 ω 4
+
=
A=
R2 C 2 ω 2 + 1
(R2 C 2 ω 2 + 1)2
(R2 C 2 ω 2 + 1)2
RCω
R2 C 2 ω 2 + 1
1
= arctan
ϕ = arctan
RCω
R2 C 2 ω 2
R2 C 2 ω 2 + 1
A parte lo sfasamento (in questo caso è verso sinistra e ha un’intensità pari all’inverso di quella
del caso precedente), in questo caso si ha una forte attenuazione del segnale per bassi valori di ω,
mentre il segnale di ingresso rimane praticamente invariato per alti valori di ω. Quindi il circuito
RC con uscita sul resistore funge da filtro passa-alto.
Torniamo al sistema considerato inizialmente (circuito RC con uscita sul condensatore).
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
7
u(t)
y(t)
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
−0.8
−1
−1
0
5
10
15
20
25
30
35
40
0
5
10
15
20
25
30
35
40
Nella figura precedente sono illustrati l’ingresso e l’uscita del sistema nel caso di onda quadra
in ingresso. Come si può vedere, l’uscita del sistema è caratterizzata da periodi di carica del
condensatore (corrispondente agli intervalli di tempo in cui l’ingresso è 1) seguiti da periodi di
scarica del condensatore (corrispondente agli intervalli di tempo in cui l’ingresso è 0). Il fenomeno
di scarica del condensatore può essere osservato attraverso la risposta libera del sistema.
La forma del segnale di uscita dipende fortemente dai valori R e C. Nella figura precedente è
illustrato il comportamento dell’uscita quando R = 2 Ohm e C = 1 Farad mentre nella figura
successiva è illustrato il comportamento dell’uscita quando R = 0.8 Ohm e 0.5 Farad.
u(t)
y(t)
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
−0.8
−1
−1
0
5
10
15
20
25
30
35
40
0
5
10
15
20
25
30
35
40
Nel caso in cui RC > 1, quando u(t) = 1 il condensatore fa molta fatica a caricarsi e quindi
presenterà un lungo periodo di transitorio; allo stesso modo, quando u(t) = 0 la scarica del condensatore è molto lenta. In pratica, il segnale, sia nella fase di carica che nella fase di scarica del
condensatore non riesce mai a raggiungere valori prossimi al valore a cui tende (1 nella carica e
0 nella scarica). Il risultato è un segnale in uscita con un andamento “triangolare” come quello
illustrato nella figura vista in precedenza.
Per RC > 1 e soprattutto per RC ≪ 1, si ha invece, in corrispondenza di u(t) = 1, una carica
del condensatore molto rapida e quindi l’andamento esponenziale può essere assimilato ad una
andamento a gradino; allo stesso modo, quando u(t) = 0 il condensatore subirà una scarica molto
veloce. Il risultato è un segnale in uscita assimilabile all’onda quadra in ingresso, come quello
illustrato nella figura precedente.
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
8
R
u(t)
C
L’onda quadra in ingresso può essere generata attraverso un generatore di tensione costante che
viene alternativamente connesso al circuito da uno switch. Nel caso illustrato in figura il generatore
di tensione è collegato ai due bipoli e quindi si carica il condensatore. Quando lo switch viene
posizionato sull’altro connettore, i due bipoli vengono corto-circuitati (non ricevono più la tensione
fornita dal generatore) e quindi si scarica il condensatore (in questo caso si ha l’evoluzione libera
del sistema).
L’evoluzione libera del circuito RC in serie può essere studiata a partire dal circuito illustrato nella
figura seguente. Nel circuito non è presente alcun generatore ma si suppone che, all’istante iniziale,
la tensione ai capi del condensatore non sia nulla e sia uguale a V0 .
R
V0
C
L’equazione di stato del sistema è la stessa vista in precedenza in cui però bisogna imporre u(t) = 0.
La risposta libera, dovuta esclusivamente alle condizioni iniziali, è:
Yl (s) = 1 ·
1
V0
1 · V0 =
1
s + RC
s + RC
che, antitrasformata, diventa la seguente funzione nel tempo:
1
yl (t) = V0 e− RC t
Questa curva rappresenta l’andamento nel tempo della tensione ai capi del condensatore quando
il circuito non è alimentato. Come si può vedere nella figura seguente (si è di nuovo ipotizzato
V0 = 1 Volt, oltre che R = 5 Ohm e C = 2 Farad), la tensione presente inizialmente ai capi del
condensatore va via via estinguendosi con il passare del tempo (scarica del condensatore).
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
9
vC(t)
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
10
20
30
40
50
60
Il resistore e il condensatore possono essere messi in parallelo invece che in serie. Il circuito
risultante è quello illustrato nella figura seguente. Si noti che in questo caso il circuito è alimentato
da un generatore di corrente che fornisce una corrente u(t) a prescindere dalla tensione ai capi del
generatore. Come nel caso del circuito RC in serie, anche il circuito RC in parallelo può essere
rappresentato come un sistema LTI di primo ordine, la cui variabile di stato è sempre la tensione
ai capi del condensatore. Questa volta però, per ottenere l’equazione di stato, bisogna applicare la
prima legge di Kirchoff al nodo che unisce generatore di corrente, resistore e condensatore.
u(t)
u(t)
R
C
iR (t)
R
iC (t)
vR (t) C
vC (t)
In un sistema di questo tipo la tensione ai capi dei tre componenti è la stessa:
v(t) = vR (t) = vC (t)
Invece, la corrente entrante il nodo citato in precedenza è uguale alla corrente uscente, ovvero
(prima legge di Kirchoff):
u(t) = iR (t) + iC (t) =
1
d
=
vR (t) + C
vC (t) =
R
dt
d
1
vC (t) + C
vC (t)
=
R
dt
L’equazione di stato del sistema è quindi:
1
1
d
vC (t) = −
vC (t) + u(t)
dt
RC
C
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
10
Considerando come uscita sempre la tensione ai capi del condensatore si ottiene:
v ′ (t) = − 1 v (t) + 1 u(t)
C
C
RC
C
y(t) = vC (t)
Il comportamento nel tempo del circuito RC in parallelo è molto simile al comportamento visto in
precedenza per quanto riguarda il circuito RC in serie (si noti comunque la variazione in ampiezza
del segnale). Nella figura seguente (a sinistra) è illustrata la risposta al gradino ottenuta con
Matlab, ipotizzando R = 5 Ohm e C = 2 Farad, e una corrente di ingresso costante pari a I in = 1
Ampère.
vC(t)
iC(t)
5
5
4.5
4.5
4
4
3.5
3.5
3
3
2.5
2.5
2
2
1.5
1.5
1
1
0.5
0.5
0
0
10
20
30
40
50
0
60
0
10
20
30
40
50
60
Dal punto di vista analitico, l’uscita del sistema (cioè la tensione ai capi del condensatore ma anche
di ogni altro bipolo del circuito) è data da
Y (s) = T (s) U (s) =
1
C
s+
1
RC
in
I
I in
C
=
·
1
s
s s + RC
avendo indicato con I in la corrente costante in ingresso. Antitrasformando si ottiene la seguente
funzione nel tempo:
1
y(t) = vC (t) = R I in 1(t) − e− RC t
L’uscita del sistema y(t), derivata e moltiplicata per la costante C, fornisce l’andamento della corrente che fluisce nel condensatore al variare del tempo (figura precedente a destra). Analiticamente
si ottiene:
iC (t) = C
d
y(t) = C R V in
dt
1
RC
1
1
e− RC t = I in e− RC t
Anche la risposta in frequenza fornisce risultati analoghi a quelli del circuito RC in serie. In questo
caso, il valore del segnale a regime è
√
R2 C 2 ω 2 + 1
sin (ωt − arctan (RCω))
yr (t) = R
R2 C 2 ω 2 + 1
cioè, rispetto alla risposta in frequenza del circuito RC in serie, vi un’ulteriore amplificazione R
del segnale di ingresso (o attenuazione se R < 1).
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
11
3 Circuiti RL
Il circuito RL, illustrato nella seguente figura, presenta un comportamento simile a quello del
circuito RC. In questo caso l’elemento dinamico è rappresentato dall’induttore. Il circuito RL può
essere rappresentato come un sistema LTI di primo ordine la cui variabile di stato è la corrente che
fluisce all’interno dell’induttore.
vR (t)
R
u(t)
iR (t)
L
u(t)
R
iL (t)
L
vL (t)
Analogamente a quanto in precedenza, per ottenere l’equazione di stato del circuito RL in serie, si
applica la seconda legge di Kirchoff all’unica maglia presente nella rete. A tale proposito, siano u(t)
la tensione in ingresso alla rete, vR (t) e vL (t) le tensioni ai capi del resistore e dell’induttore, iR (t)
e iL (t) le correnti che scorrono all’interno del resistore e dell’induttore (si veda la figura precedente,
a destra).
La corrente all’interno dei componenti della stessa maglia è uguale. Si ha quindi:
iR (t) = iL (t)
iL (t) rappresenta la variabile di stato del sistema. Dalla seconda legge di Kirchoff si ha:
u(t) = vR (t) + vL (t) =
d
= R iR (t) + L
iL (t) =
dt
d
iL (t)
= R iL (t) + L
dt
L’equazione di stato del sistema è pertanto:
d
R
1
iL (t) = − iL (t) + u(t)
dt
L
L
Ipotizzando come uscita la corrente che fluisce all’interno dell’induttore si ottiene:
i′ (t) = − R i (t) + 1 u(t)
L
L
L
L
y(t) = iL (t)
La figura seguente (a sinistra), ottenuta con Matlab, illustra la risposta al gradino, ipotizzando
R = 2 Ohm e L = 2 Henry, e una tensione di ingresso costante pari a V in = 1 Volt (cioè u(t) = 1(t)).
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
12
iL(t)
vL(t)
1
1
0.9
0.9
0.8
0.8
0.7
0.7
0.6
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
0
10
20
30
40
50
60
0
0
10
20
30
40
50
60
In relazione al grafico ottenuto, si possono fare delle valutazioni equivalenti a quelle fatte per
il circuito RC in serie, facendo attenzione però che in questo caso l’uscita è rappresentata dalla
corrente e non dalla tensione. Quindi, in questo caso, l’induttore, alimentato da una tensione
costante, viene percorso dalla massima corrente possibile, mentre la tensione ai capi dell’induttore
va esaurendosi nel tempo (figura a destra).
Per verificare analiticamente questo comportamento, si consideri la funzione di trasferimento del
sistema:
1
1
T (s) = 1 ·
· = L
R L
R
s+
s+
L
L
1
Supponendo che il segnale d’ingresso costante abbia un ampiezza pari a V in , l’uscita del sistema è:
V in
V in
1
V in 1 V in
·
= L =
· −
·
Y (s) = T (s) U (s) =
R
R
R
s
L s
L
s+
s+
s s+
L
L
L
1
L
che, antitrasformata, diventa la seguente funzione nel tempo:
y(t) = iL (t) =
V in R
1(t) − e− L t
L
Tale funzione corrisponde (quando V in = 1) alla curva illustrata nella precedente figura. L’uscita
del sistema y(t), derivata e moltiplicata per la costante L, fornisce l’andamento della tensione ai
capi dell’induttore al variare del tempo. Analiticamente si ottiene:
vL (t) = L
R
d
y(t) = V in e− L t
dt
che corrisponde (quando V in = 1) al segnale illustrato nella figura precedente a destra. Come si
può vedere, la tensione, inizialmente non nulla, con il passare del tempo tende a 0 (l’induttore
tende a corto-circuitarsi).
Lo schema Simulink del circuito RL, illustrato nella seguente figura, ci consente di valutare il
comportamento del sistema alimentato da tensioni con una particolare forma d’onda.
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
13
iL'(t)
u(t)
iL(t)
1
s
1/L
y(t)
R/L
Ad esempio, nella figura seguente sono illustrati l’ingresso e l’uscita del sistema nel caso di segnale
in ingresso sinusoidale con frequenza ω = 0.5 rad
sec . Anche in questo caso, passato un certo periodo
di transitorio, il segnale in uscita è una sinusoide di ampiezza minore. Bisogna però fare sempre
attenzione perché tale segnale in uscita è la corrente nell’induttore e non la tensione ai suoi capi.
Per fare quindi delle considerazioni relative alle caratteristiche di filtraggio dobbiamo considerare
la derivata nel tempo di questo segnale di uscita. Come si vedrà più avanti analiticamente, il
circuito RL in serie, cosı̀ come presentato, ha caratteristiche di filtraggio passa-alto.
u(t)
y(t)
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
−0.8
−1
−1
0
20
40
60
80
100
120
140
160
0
20
40
60
80
100
120
140
160
Attraverso il calcolo della risposta in frequenza determiniamo analiticamente il valore dell’uscita a
regime con il segnale sin ωt in ingresso. L’uscita è:
√
L
L2 ω 2 + R 2
yr (t) = 2 2
sin
ωt
−
arctan
ω
L ω + R2
R
essendo:
R
R
ω
jω −
− 2 +j
R
Lω
L
L
L =
=
=
−j 2 2
T (jω) =
2 2
2
2
2 ω 2 + R2
R
L
L
ω
+ R2
−L
ω
−
R
R
jω +
−ω 2 − 2
2
L
L
L
s
√
R2
L2 ω 2 + R 2
L2 ω 2
+
= 2 2
A=
2
2
L ω + R2
(L2 ω 2 + R2 )
(L2 ω 2 + R2 )
Lω
− 2 2
2
L
ω
ϕ = arctan L ω + R = − arctan
R
R
L2 ω 2 + R 2
1
L
Davide Giglio
1
L
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
14
Come già osservato precedentemente, yr (t) rappresenta la corrente nell’induttore. Per verificare
caratteristiche di filtraggio dobbiamo invece verificare il comportamento a regime del valore della
tensione ai capi dell’induttore. Per effettuare questo calcolo, osserviamo che:
n
o
y ′ (t) = L−1 s Y (s) − y(0− )
e quindi, supponendo y(0− ) = 0, si ottiene:
ω
1
s
·s
ω
′
−1
−1
L
L
y (t) = L
· 2
=L
2
R
s + R s + ω
s+
(s2 + ω 2 )
L
L
E’ quindi possibile determinare la risposta in frequenza al sistema caratterizzato dalla funzione di
trasferimento:
1
s
T (s) = L
R
s+
L
Il risultato è il valore a regime della tensione ai capi dell’induttore:
√
R
ω L2 ω 2 + R 2
sin ωt + arctan
vL,r (t) =
L2 ω 2 + R 2
Lω
essendo:
1
R
1
R
1
jω
jω
−
− ω2 − j 2 ω
jω
Lω 2
Rω
L
L
L
L
=
=
=
+j 2 2
T (jω) = L
2
2
2
2
2
R
L
ω
+
R
L
ω
+ R2
R
R
jω +
−ω 2 − 2
−ω 2 − 2
L
L
L
s
√
L2 ω 4
R2 ω 2
ω L2 ω 2 + R 2
A=
+
=
2
2
L2 ω 2 + R 2
(L2 ω 2 + R2 )
(L2 ω 2 + R2 )
Rω
L2 ω 2 + R 2
R
ϕ = arctan
= arctan Lω
Lω 2
L2 ω 2 + R 2
L’analisi di questo valore a regime, al variare della frequenza ω del segnale di ingresso, porta a
concludere che il circuito RL in serie può essere utilizzato come filtro passa-alto.
u(t)
u(t)
R
Davide Giglio
L
iR (t)
R
iL (t)
vR (t) L
vL (t)
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
15
Il resistore e l’induttore possono essere messi in parallelo invece che in serie. Il circuito risultante
è quello illustrato nella figura precedente. In questo caso il circuito è alimentato da un generatore
di corrente che fornisce una corrente u(t) a prescindere dalla tensione ai capi del generatore. Per
ottenere l’equazione di stato del circuito RL parallelo si applica la prima legge di Kirchoff al nodo
che unisce generatore di corrente, resistore e induttore.
Essendo i componenti in parallelo, la tensione ai capi del generatore, del resistore e dell’induttore
è la stessa:
v(t) = vR (t) = vL (t)
Invece, la corrente entrante il nodo che unisce i tre bipoli è uguale alla corrente uscente, ovvero
(prima legge di Kirchoff):
u(t) = iR (t) + iL (t) =
1
=
vR (t) + iL (t) =
R
L d
1
vL (t) + iL (t) =
iL (t) + iL (t)
=
R
R dt
L’equazione di stato del sistema è quindi:
R
R
d
iL (t) = − iL (t) + u(t)
dt
L
L
Considerando come uscita sempre la corrente all’interno dell’induttore si ottiene:
i′ (t) = − R i (t) + R u(t)
L
L
L
L
y(t) = iL (t)
Il comportamento nel tempo del circuito RL in parallelo è analogo (a meno di differenze dovute ai
diversi parametri) al comportamento visto per il circuito RL in serie.
4 Circuito LC (oscillatore elettrico)
vL (t)
L
u(t)
iL (t)
C
u(t)
L
iC (t)
C
vC (t)
Il circuito LC illustrato nella precedente figura è la più semplice rete elettrica che viene rappresentata da un sistema LTI di secondo ordine. Il circuito LC presenta infatti due elementi dinamici: un
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
16
induttore (con induttanza L) collegato in serie ad un condensatore (con capacità C). Il circuito è
alimentato da un generatore di tensione. Le variabili di stato del sistema LTI saranno la corrente
che fluisce all’interno dell’induttore (che, data la struttura della rete, corrisponde alla corrente che
circola nell’intera maglia) e la tensione ai capi del condensatore.
Siano u(t) la tensione in ingresso alla rete, vL (t) e vC (t) le tensioni ai capi dell’induttore e del
condensatore, iL (t) e iC (t) le correnti che scorrono all’interno dell’induttore e del condensatore. Si
osserva subito che le correnti che fluiscono nei singoli bipoli sono tutte uguali, cioè:
iL (t) = iC (t)
La seconda legge di Kirchoff , applicata all’unica maglia presente nella rete, fornisce:
u(t) = vL (t) + vC (t) =
d
=L
iL (t) + vC (t)
dt
Questa equazione è un’equazione di stato. Per determinare l’altra equazione di stato bisogna cercare un’equazione che metta in relazione la derivata dell’altra variabile di stato (la tensione ai capi
del condensatore) con le due variabili di stato. A tale proposito, si osservi che la legge di funzionamento del condensatore mette in relazione la derivata della tensione ai capi del condensatore con
la corrente che fluisce al proprio interno, che però è la stessa della corrente che fluisce all’interno
dell’induttore, ovvero:
d
1
1
vC (t) =
iC (t) =
iL (t)
dt
C
C
Questa relazione può essere utilizzata (nella determinazione delle equazioni di stato) ogni volta che
un condensatore e un induttore sono presenti nella stessa maglia.
Si ha quindi:
1
1
d
iL (t) = − vC (t) + u(t)
dt
L
L
1
d
vC (t) =
iL (t)
dt
C
Ponendo iL (t) = x1 (t) e vC (t) = x2 (t) e ipotizzando come uscita la tensione ai capi del condensatore
si ha la seguente classe di sistemi LTI:
1
1
0
−
L x(t) + L u(t)
ẋ(t) =
1
0
0
C
y(t) = 0 1 x(t)
Prima di valutare il comportamento del sistema attraverso Matlab e Simulink, facciamo alcune
considerazioni su questa classe di sistemi.
1
1
s
L
=0
s2 +
=0
det(sI − A) = 0
det
− C1 s
LC
Essendo LC > 0 il sistema presenta due poli complessi coniugati a parte reale nulla:
√
LC
s = ±j
LC
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
La matrice inversa (sI − A)−1
1
s
L
−
1
1
s2 +
s2 + LC
LC
1
s
C
1
1
s2 + LC
s2 + LC
17
è:
da cui si ottiene la funzione di trasferimento:
T (s) = C (sI − A)−1 B =
1
LC
s2 +
1
LC
I poli del sistema e la struttura della funzione di trasferimento evidenziano un comportamento
oscillatorio del sistema. Il circuito LC viene infatti chiamato “oscillatore elettrico” in quanto
presenta, anche con una tensione costante in ingresso, una uscita sinusoidale. Tutte le correnti e
le tensioni in gioco presentano un andamento nel tempo oscillatorio.
Valutiamo, attraverso Matlab, il valore della tensione ai capi del condensatore e della corrente nel
circuito quando L = 1 Henry e C = 2 Farad e in ingresso vi è una tensione costante pari a 1 Volt.
vC(t)
iC(t)
2
2
1.5
1.5
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
−2
−2
0
5
10
15
20
25
30
35
40
0
5
10
15
20
25
30
35
40
Le curve illustrate nelle due figure precedenti evidenziano l’andamento oscillatorio del sistema.
Determiniamo analiticamente, nel caso generale, i due segnali (tensione ai capi del condensatore e
corrente nel circuito). A fronte di un ingresso costante di tensione V in Volt, l’uscita è:
V in
in
V
1
s
= V in
Y (s) = T (s) ·
= LC
−
1
1
s
s
2
s +
s s2 +
LC
LC
Antitrasformando si ottiene:
y(t) = vC (t) = V
in
!
√
LC
1(t) − cos
t
LC
e quindi:
√
√
√
√
LC
LC
LC
d
in
in LC
vC (t) = C V
sin
t=V
sin
t
iC (t) = C
dt
LC
LC
L
LC
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
18
La tensione ai capi dell’induttore è:
vL (t) = u(t) − vC (t) = V in · 1(t) − V in · 1(t) − V in cos
√
√
LC
LC
t = V in cos
t
LC
LC
e, ovviamente:
iL (t) = iC (t) = V
in
√
√
LC
LC
sin
t
L
LC
Come si può vedere, oscilla tutto.
In presenza di sistemi che sono caratterizzati da un comportamento oscillatorio dello stato è molto
importante stare attenti quando si alimenta il sistema con una tensione alternata. E’ infatti
possibile che, con segnali di ingresso con certe frequenze (in particolare con la stessa frequenza
secondo la quale evolve il sistema), l’uscita diventi instabile. Questo a causa del fenomeno della
risonanza.
Verifichiamo questo fatto implementando attraverso Simulink il nostro sistema. Il modello utilizzato è quello nella figura seguente.
iL'(t)
u(t)
iL(t)
1
s
1/L
vC'(t)
1/C
vC(t)
1
s
y(t)
1/L
Si consideri inoltre lo specifico sistema caratterizzato da L = 1 Henry e C = 2 Farad, ovvero:
0 −1
1
ẋ(t) =
x(t) +
u(t)
0.5 0
0
y(t) = 0 1 x(t)
Nei grafici seguenti vi è l’uscita del sistema per u(t) = sin t e u(t) = sin
u(t)
3
2
2
1
1
0
0
−1
−1
−2
−2
0
10
20
Davide Giglio
30
2
2 t.
y(t)
3
−3
√
40
50
60
−3
0
10
20
30
40
50
60
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
19
u(t)
y(t)
20
20
15
15
10
10
5
5
0
0
−5
−5
−10
−10
−15
−15
−20
0
10
20
30
40
50
−20
60
0
10
20
30
40
50
60
Come si può vedere, nel secondo caso, la frequenza del segnale di ingresso, uguale a quella dovuta
ai poli del sistema, rende instabile l’uscita del sistema.
L’oscillatore elettrico evolve nel tempo con il comportamento sopra descritto anche in assenza di
segnale in ingresso. In assenza di tensione in ingresso, al posto del generatore di tensione vi è un filo
(il bipolo viene corto-circuitato). In questo caso l’evoluzione del sistema è dovuta esclusivamente
alla componente libera (“evoluzione libera”). Il circuito risultante è quello illustrato nella figura
seguente.
L
C
Le equazioni di stato di questo sistema sono:
1
0 −
L
ẋ(t) =
x(t)
1
0
C
(non ci interessa l’uscita).
Determiniamo l’evoluzione dello stato attraverso Simulink. Il modello Simulink da utilizzare è
illustrato nella figura seguente.
x1'(t)
1
s
x1(t)
1/C
x2'(t)
1
s
x2(t)
-1/L
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
20
Si ponga x1 (0− ) = iL (0− ) = 4 Ampère e x2 (0− ) = vC (0− ) = 4 Volt. Con tali condizioni iniziali (e
con L = 1 Henry e C = 2 Farad), l’evoluzione dello stato è quella illustrata di seguito.
x1(t)
x2(t)
6
6
4
4
2
2
0
0
−2
−2
−4
−4
−6
−6
0
10
20
30
40
50
60
0
10
20
30
40
50
60
In generale, analiticamente si ha:
X(s) = (sI − A)−1 x(0− ) con x(0− ) =
X(s) =
x2 (0− )
L
1
2
s +
LC
−
x1 (0 )
+ x2 (0− ) s
C
1
s2 +
LC
x1 (0− ) s −
x1 (0− )
x2 (0− )
Antitrasformando si ottiene:
√
√
√
x2 (0− ) LC
LC
LC
−
t−
sin
t
x1 (t) = x1 (0 ) cos
LC
L
LC
√
√
√
−
x2 (t) = x1 (0 ) LC sin LC t + x2 (0− ) cos LC t
C
LC
LC
La figura seguente illustra l’andamento al variare del tempo del rapporto
x2 (0− )
x1 (0− ) .
5
4
3
2
x2(t)
1
0
−1
−2
−3
−4
−5
−6
−4
−2
0
2
4
6
x1(t)
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
21
E’ interessante osservare come l’andamento al variare del tempo del rapporto tra la variabile di
stato x2 (t) e la variabile di stato x1 produca un andamento ellittico costante. Questo è il classico
comportamento di un sistema oscillatorio semplicemente stabile.
Nella figura precedente è illustrato tale andamento per tre diverse coppie di valori x1 (0− ) e x2 (0− ).
L’ellisse più esterna è relativa ai valori x1 (0− ) = 4 Ampère e x2 (0− ) = 3 Volt, l’ellisse centrale è
relativa ai valori x1 (0− ) = 3 Ampère e x2 (0− ) = 2 Volt e, infine, l’ellisse più interna è relativa ai
valori x1 (0− ) = 2 Ampère e x2 (0− ) = 1 Volt.
5 Circuito RLC
Si consideri la rete elettrica illustrata nella seguente figura.
u(t)
L
C
R
Essa è composta da un induttore (con induttanza L), da un resistore (con resistenza R) e da
un condensatore (con capacità C). I tre bipoli sono in parallelo. Il circuito è alimentato da un
generatore di corrente. L’obiettivo è determinare l’evoluzione nel tempo della tensione ai capi del
condensatore (che, in ogni caso, data la struttura del circuito, corrisponde alla tensione ai capi
degli altri due bipoli). Nella figura seguente sono indicate tutte le tensioni e le correnti in gioco.
u(t)
iL (t)
L
iR (t)
vL (t)
R
iC (t)
vR (t)
C
vC (t)
Le variabili di stato del sistema LTI che rappresenta il funzionamento di questo circuito sono la
corrente iL (t) all’interno dell’induttore e la tensione vC (t) ai capi del condensatore. Il sistema
risultante sarà quindi di secondo ordine. Per scrivere le equazioni di stato è necessario applicare le
leggi di Kirchoff.
Dalla prima legge di Kirchoff si ottiene:
u(t) = iL (t) + iR (t) + iC (t) =
d
1
vC (t)
= iL (t) + vR (t) + C
R
dt
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
22
e, dal momento che vL (t) = vR (t) e vR (t) = vC (t) (seconda legge di Kirchoff applicata alle due
magli della rete), si ottiene:
u(t) = iL (t) +
1
d
vC (t) + C
vC (t)
R
dt
che fornisce la prima equazione di stato:
1
1
1
d
vC (t) = −
vC (t) − iL (t) + u(t)
dt
RC
C
C
Per scrivere la seconda equazione di stato bisogna cercare una relazione che leghi la derivata
della corrente che fluisce all’interno dell’induttore con tale corrente e con la tensione ai capi del
condensatore (o, data la struttura “parallela” del circuito, con ogni altra tensione). Una relazione
di questo tipo è la legge di funzionamento dell’induttore. Si ha infatti:
vL (t) = L
d
iL (t)
dt
⇒
vC (t) = L
d
iL (t)
dt
che fornisce la seconda equazione di stato:
d
1
iL (t) = vC (t)
dt
L
Ponendo vC (t) = x1 (t) e iL (t) = x2 (t) si ottiene la seguente classe di sistemi LTI:
1
1
1
−
−
C x(t) + C u(t)
ẋ(t) = RC
1
0
0
L
y(t) = 1 0 x(t)
Si ponga R = 0.5 Ohm, C = 4 Farad e L = 2 Henry. Il sistema risultante è:
ẋ(t) = −0.5 −0.25 x(t) + 0.25 u(t)
0.5
0
0
y(t) = 1 0 x(t)
Valutiamo il comportamento di quest’ultimo sistema attraverso Matlab / Simulink, e, in particolare, attraverso il seguente modello:
u(t)
ss(A,B,C,D)
y(t)
Circuito RLC
Nella figura seguente a destra è illustrata l’uscita del sistema (tensione ai capi del condensatore) a
fronte di un ingresso costante di 2 Ampère (illustrato nella figura seguente a sinistra).
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
23
u(t)
y(t)
2
2
1.5
1.5
1
1
0.5
0.5
0
0
0
5
10
15
20
25
30
35
40
0
5
10
15
20
25
30
35
40
Nella figura seguente è invece illustrata l’uscita del sistema quando si pone in ingresso un segnale
sinusoidale sin 2t.
u(t)
y(t)
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
−0.8
−1
−1
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
6 Rete elettrica complessa (1)
Si consideri la rete elettrica illustrata nella seguente figura.
L1
C1
R1
C2
R2
L2
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
24
Essa è composta da due resistori (con resistenza R1 e R2 ), da due condensatori (con capacità
C1 e C2 ) e da due induttori (con induttanza L1 e L2 ). Il circuito è alimentato da un generatore di corrente. L’obiettivo è determinare l’evoluzione nel tempo della tensione ai capi dei due
condensatori.
Nella figura seguente sono indicate tutte le tensioni e le correnti in gioco. Per potere mettere in
equazioni di stato è necessario innanzitutto definire le variabili di stato e poi ricavare le equazioni
dalle due leggi di Kirchoff (alle maglie e ai nodi).
vL1 (t)
iL1 (t) L1 iR1 (t)
u(t)
iC1 (t)
vC1 (t)
C1
R1
vR1 (t)
R2
vR2 (t)
iC2 (t)
vC2 (t)
C2
iL2 (t)
iR2 (t)
L2
vL2 (t)
Come più volte ricordato, le variabili di stato di una rete elettrica sono rappresentate dalle tensioni
ai capi dei condensatori e dalle correnti che fluiscono all’interno degli induttori. Nel nostro caso
abbiamo quindi 4 variabili di stato, cioè un sistema del quarto ordine.
Data la struttura della rete, dalla prima legge di Kirchoff possiamo ricavare le seguenti equazioni:
u(t) = iL1 (t) + iC1 (t)
⇒
u(t) = iL1 (t) + C1
iC2 (t) = u(t) + iL2 (t)
⇒
C2
d
vC (t)
dt 1
d
vC (t) = u(t) + iL2 (t)
dt 2
mentre dalla seconda legge si ottiene:
vC1 (t) − vL1 (t) − vR1 (t) = 0
⇒
vC1 (t) − L1
d
iL (t) − R1 iL1 (t) = 0
dt 1
vC2 (t) + vL2 (t) + vR2 (t) = 0
⇒
vC2 (t) + L2
d
iL (t) + R2 iL2 (t) = 0
dt 2
Avendo posto vC1 (t) = x1 (t), vC2 (t) = x2 (t), iL1 (t) = x3 (t) e iL2 (t) = x4 (t) (si veda la figura
seguente) si ottiene le seguenti equazioni di stato:
ẋ1 (t) = −
ẋ2 (t) =
1
1
x3 (t) +
u(t)
C1
C1
1
1
x4 (t) +
u(t)
C2
C2
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
25
1
R1
x1 (t) −
x3 (t)
L1
L1
R2
1
x2 (t) −
x4 (t)
ẋ4 (t) = −
L2
L2
ẋ3 (t) =
x3 (t) L1
u(t)
x1 (t)
C1
R1
x2 (t)
C2
R2
x4 (t)
L2
Dal momento che l’uscita è rappresentata sia dalla tensione ai capi del condensatore C1 sia da
quella ai capi del condensatore C2 , il sistema (o meglio la classe di sistemi LTI) è:
1
0
0
−
0
1
C1
1
C1
0
1
0
0
C
ẋ(t) =
2
x(t) +
u(t)
1
R1
C
2
0
−
0
0
L1
L
1
1
R2
0
0 −
0
−
L
L
2
2
1
0
0
0
y(t) =
x(t)
0 1 0 0
Si consideri, per semplicità, R1 = R2 = R, C1 = C2 = C e L1 = L2 = L e si ponga R = 2 Ohm,
C = 1 Farad e L = 1 Henry. Il sistema risultante è:
0 0 −1 0
1
0 0
1
0
1
ẋ(t) = 1 0 −2 0 x(t) + 0 u(t)
0 −1 0 −2
0
y(t) = 1 0 0 0 x(t)
0 1 0 0
Valutiamo il comportamento di quest’ultimo sistema attraverso Matlab / Simulink, e, in particolare, attraverso il seguente modello:
u(t)
ss(A,B,C,D)
y(t)
Rete elettrica complessa (1)
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
26
Nelle due figure seguenti sono illustrate, oltre l’ingresso, le uscite del sistema (tensioni ai capi dei
condensatori) a fronte di un ingresso costante di 2 Ampère. Le due uscite sono uguali.
y1(t) e y2(t)
u(t)
5
5
4.5
4.5
4
4
3.5
3.5
3
3
2.5
2.5
2
2
1.5
1.5
1
1
0.5
0.5
0
0
2
4
6
8
10
12
14
16
18
0
20
0
2
4
6
8
10
12
14
16
18
20
Nelle due figure seguenti sono invece illustrate le uscite del sistema quando si pone in ingresso un
segnale sinusoidale sin 2t.
y1(t) e y2(t)
u(t)
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
−0.8
−1
−1
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
7 Rete elettrica complessa (2)
Si consideri la rete elettrica illustrata nella seguente figura.
L1
C1
R1
R3
C3
R5
R4
C4
R6
C2
R2
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
27
Essa è composta da sei resistori (con resistenza Ri , i = 1, . . . , 6), da quattro condensatori (con
capacità Cj , j = 1, . . . , 4) e da un induttore (con induttanza L1 ). Il circuito è alimentato da un
generatore di corrente. L’obiettivo è determinare l’evoluzione nel tempo della tensione complessiva
tra i resistori R5 e R6 .
Nella figura seguente sono indicate tutte le tensioni e le correnti in gioco. Per potere mettere in
equazioni di stato è necessario innanzitutto definire le variabili di stato e poi ricavare le equazioni
dalle due leggi di Kirchoff (alle maglie e ai nodi).
vL1 (t)
iL1 (t)
iC1 (t)
u(t)
L1
iR1 (t)
C1
vC1 (t)
iR3 (t)
vR3 (t)
vR1 (t)
R1
C3
R3
iC2 (t)
R5
vR5 (t)
vC3 (t)
C2
vC2 (t)
iR2 (t)
vR2 (t)
iC3 (t)
iR5 (t)
R2
iR4 (t)
vR4 (t)
R4
iC4 (t)
iR6 (t)
C4
R6
vR6 (t)
vC4 (t)
Nella rete elettrica considerata si hanno 5 variabili di stato: quattro dovute ai condensatori e una
dovuta all’induttore. Si ha quindi un sistema del quinto ordine.
Data la struttura della rete, dalla prima legge di Kirchoff possiamo ricavare le seguenti equazioni:
u(t) = iL1 (t) + iC1 (t)
iL1 (t) + iC1 (t) = iR1 (t) + iR3 (t) + iC3 (t) + iR5 (t)
iR1 (t) = iC2 (t) + iR2 (t)
iC2 (t) + iR3 (t) = iR4 (t)
iC3 (t) + iR5 (t) = iC4 (t) + iR6 (t)
iR2 (t) + iR4 (t) + iC4 (t) + iR6 (t) = u(t)
Dalla seconda legge di Kirchoff si ottiene invece:
vL1 (t) = vC1 (t)
vR1 (t) + vC2 (t) − vR3 (t) = 0
vR2 (t) − vC2 (t) − vR4 (t) = 0
vR3 (t) + vR4 (t) − vC3 (t) − vC4 (t) = 0
vC3 (t) − vR5 (t) = 0
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
28
vC4 (t) − vR6 (t) = 0
Queste 12 equazioni consentono di definire le equazioni di stato. Per fare questo è necessario
scrivere tutte le equazioni in funzione delle sole variabili di stato e delle loro derivate. La prima
cosa da fare per ottenere ciò è scrivere espressamente le variabili di stato per quanto riguarda i
′
condensatori e gli induttori (cioè sostituire i termini iCj , j = 1, . . . , 4, con Cj vC
e il termine
j
′
vL1 con il termine L1 iL1 ). Inoltre, per minimizzare il numero di incognite, si devono scrivere le
tensioni ai capi dei resistori in funzione delle correnti, in modo da avere, come uniche incognite, le
correnti che fluiscono nei resistori.
Si ottengono quindi le seguenti equazioni:
(1)
→
′
(t)
u(t) = iL1 (t) + C1 vC
1
(2)
→
′
′
(t) + iR5 (t)
(t) = iR1 (t) + iR3 (t) + C3 vC
iL1 (t) + C1 vC
3
1
(3)
→
′
(t) + iR2 (t)
iR1 (t) = C2 vC
2
(4)
→
′
(t) + iR3 (t) = iR4 (t)
C2 vC
2
(5)
→
′
′
(t) + iR6 (t)
(t) + iR5 (t) = C4 vC
C3 vC
4
3
(6)
→
′
(t) + iR6 (t) = u(t)
iR2 (t) + iR4 (t) + C4 vC
4
(7)
→
L1 i′L1 (t) = vC1 (t)
(8)
→
R1 iR1 (t) + vC2 (t) − R3 iR3 (t) = 0
(9)
→
R2 iR2 (t) − vC2 (t) − R4 iR4 (t) = 0
(10)
→
R3 iR3 (t) + R4 iR4 (t) − vC3 (t) − vC4 (t) = 0
(11)
→
vC3 (t) − R5 iR5 (t) = 0
(12)
→
vC4 (t) − R6 iR6 (t) = 0
Le equazioni di stato si ottengono dalle equazioni che presentano la derivata di una variabile di
stato. Delle 7 equazioni che contengono una derivata (non tutte linearmente indipendenti in quanto
le variabili di stato sono 5), si utilizzino le equazioni (1), (2), (3), (6) e (7). Il risultato sono le
seguenti equazioni:
′
(t) = −
vC
1
1
1
iL (t) +
u(t)
C1 1
C1
1
[u(t) − iR1 (t) − iR3 (t) − iR5 (t)]
C3
1
′
(t) =
vC
[iR1 (t) − iR2 (t)]
2
C2
1
′
(t) =
vC
[u(t) − iR2 (t) − iR4 (t) − iR6 (t)]
4
C4
1
vC (t)
i′L1 (t) =
L1 1
′
(t) =
vC
3
La prima e l’ultima sono equazioni già nella forma corretta (non compare nulla che non sia variabile
di stato, sua derivata o ingresso). Nelle tre equazioni centrali sono invece presenti i termini relativi
alle correnti che fluiscono all’interno dei resistori. E’ necessario esprimere questi termini in funzione
delle variabili di stato. E’ possibile fare questo utilizzando le restanti equazioni dell’elenco visto
precedentemente.
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
29
Per semplificare la trattazione, si ipotizza che tutti i resistori abbiano la stessa resistenza, cioè
Ri = R ∀i = 1, . . . , 6, e che tutti i condensatori abbiano la stessa capacità, cioè Cj = C ∀i =
1, . . . , 4. Inoltre verrà indicata con L l’induttanda dell’unico induttore presente nella rete. Si noti
che senza questa semplificazione i conti risulterebbe estremamente lunghi e complicati.
Dalle equazioni (11) e (12) si ricava immediatamente:
iR5 (t) =
1
vC (t)
R 3
iR6 (t) =
1
vC (t)
R 4
Per il calcolo di iR1 (t), iR2 (t), iR3 (t) e iR4 (t) si considerino le equazioni (1), (2), (5), (6) e le
equazioni (8), (9), (10). Le prime quattro forniscono (con opportuni calcoli di sostituzione):
iR2 (t) + iR4 (t) − iR1 (t) − iR3 (t) = 0
che, insieme alle ultime tre, compongono il seguente sistema di quattro equazioni lineari a quattro
incognite.
iR2 (t) + iR4 (t) − iR1 (t) − iR3 (t) = 0
R iR (t) + vC − R iR (t) = 0
3
2
1
R iR2 (t) − vC2 − R iR4 (t) = 0
R iR3 (t) + R iR4 (t) − vC3 − vC4 = 0
La risoluzione di questo sistema fornisce:
iR1 (t) = −
1
1
1
vC2 (t) +
vC3 (t) +
vC (t)
2R
2R
2R 4
1
1
1
vC (t) +
vC (t) +
vC (t)
2R 2
2R 3
2R 4
1
1
1
iR3 (t) =
vC (t) +
vC (t) +
vC (t)
2R 2
2R 3
2R 4
1
1
1
iR4 (t) = −
vC2 (t) +
vC3 (t) +
vC (t)
2R
2R
2R 4
Si noti che iR1 (t) = iR4 (t) e iR2 (t) = iR3 (t).
iR2 (t) =
Tornando alle nostre equazioni di stato, operando le opportune semplificazioni, si ottiene:
i′L1 (t) =
1
vC (t)
L 1
1
1
iL1 (t) + u(t)
C
C
1
′
vC2 (t) = −
vC (t)
RC 2
2
1
′
(t) = −
vC
vC (t) −
vC (t) +
3
RC 3
RC 4
1
2
′
(t) = −
vC
vC (t) −
vC (t) +
4
RC 3
RC 4
′
(t) = −
vC
1
1
u(t)
C
1
u(t)
C
L’uscita richiesta è la tensione complessiva tra i resistori R5 e R6 , ovvero:
y(t) = vR5 (t) + vR6 (t) = vC3 (t) + vC4 (t)
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
x2 (t)
u(t)
30
L1
C1
x1 (t)
R1
R3
x4 (t)
C3
R5
R4
x5 (t)
C4
R6
C2
x3 (t)
R2
Ponendo vC1 (t) = x1 (t), iL1 (t) = x2 (t), vC2 (t) = x3 (t), vC3 (t) = x4 (t) e vC4 (t) = x5 (t) si ottiene
la seguente classe di sistemi LTI:
1
0 −
0
0
0
1
C
1
C
0
0
0
0
0
L
0
1
ẋ(t) = 0
u(t)
0
−
0
0
x(t) +
RC
1
1
2
0
C
−
0
0
−
1
RC
RC
1
2
C
0
0
0
−
−
RC
RC
y(t) = 0 0 0 1 1 x(t)
Si ponga R = 0.5 Ohm, C = 2 Farad e L = 1 Henry. Il sistema risultante è:
0 −0.5 0
0
0
0.5
1
0
0
0
0
0
ẋ(t) = 0
0
−1 0
0 x(t) +
0 u(t)
0
0
0 −2 −1
0.5
0
0
0 −1 −2
0.5
y(t) = 0 0 0 1 1 x(t)
Valutiamo il comportamento di quest’ultimo sistema attraverso Matlab / Simulink, e, in particolare, attraverso il seguente modello:
u(t)
ss(A,B,C,D)
y(t)
Rete elettrica complessa (2)
Nella figura seguente a destra è illustrata l’uscita del sistema (tensione complessiva tra i resistori
R5 e R6 ) a fronte di un ingresso costante di 2 Ampère (illustrato nella figura seguente a sinistra).
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
31
u(t)
y(t)
2
2
1.5
1.5
1
1
0.5
0.5
0
0
1
2
3
4
5
6
7
8
9
0
10
0
1
2
3
4
5
6
7
8
9
10
Nella figura seguente è invece illustrata l’uscita del sistema quando si pone in ingresso un segnale
sinusoidale sin 2t.
u(t)
y(t)
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
−0.8
−1
−1
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
8 Rete elettrica non lineare
Si consideri la rete elettrica illustrata nella seguente figura.
vR (t)
vN L (t)
BNL
iR (t)
vC (t)
R
iN L (t)
C
iL (t)
L
vL (t)
iC (t)
u(t)
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
32
Tale rete è composta da quattro bipoli in serie: un condensatore con capacità C, un resistore con
resistenza R, un induttore con induttanza L e un bipolo non lineare caratterizzato dalla seguente
relazione caratteristica tensione-corrente:
v(t) = −R i(t) + i3 (t)
Il circuito è alimentato da un generatore di tensione. L’uscita del sistema è rappresentata dalla
tensione ai capi del condensatore.
Per definire le equazioni di stato che regolano il funzionamento del circuito, procediamo come visto
in precedenza. Dalla seconda legge di Kirchoff si ottiene:
u(t) = vC (t) + vR (t) + vN L (t) + vL (t) =
= vC (t) + R iR (t) − R iN L (t) + i3N L (t) + L
d
iL (t)
dt
Dato che iC (t) = iR (t) = iN L (t) = iL (t) (la corrente all’interno di una maglia è la stessa per tutti
i bipoli): si ottiene:
u(t) = vC (t) + R iL (t) − R iL (t) + i3L (t) + L
= vC (t) + i3L (t) + L
d
iL (t) =
dt
d
iL (t)
dt
Una equazione di stato è quindi:
d
1
1
1
iL (t) = − vC (t) − i3L (t) + u(t)
dt
L
L
L
L’altra equazione di stato è data dalla legge di funzionamento del condensatore:
iC (t) = C
d
vC (t)
dt
iL (t) = C
d
vC (t)
dt
quindi:
1
d
vC (t) =
iL (t)
dt
C
Ponendo vC (t) = x1 (t) e iL (t) = x2 (t) e ricordando che l’uscita corrisponde a vC (t), si ottiene il
sistema non lineare tempo invariante descritto dalle seguenti equazioni di stato:
1
ẋ1 (t) =
x2 (t)
C
1
1
1
ẋ2 (t) = − x1 (t) − x32 (t) + u(t)
L
L
L
y(t) = x1 (t)
Questa classe di sistema non lineare può essere modellata in Simulink attraverso il seguente schema.
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
x2'(t)
u(t)
1/L
33
x2(t)
1
s
x1'(t)
1/C
x1(t)
1
s
y(t)
3
x2^3(t)
uv
1/L
1/L
Si ponga R = 2 Ohm, C = 2 Farad e L = 1 Henry. Il sistema risultante è:
ẋ1 (t) = 0.5 x2 (t)
ẋ2 (t) = −x1 (t) − x32 (t) + u(t)
y(t) = x1 (t)
Nelle due figure seguenti è illustrata l’uscita del sistema (tensioni ai capi del condensatore) a fronte
di un ingresso costante pari a 4 Volt, cioè un segnale di ingresso u(t) = 4 · 1(t) (figura a sinistra),
e a fronte di un ingresso sinusoidale pari a 0.5 sin 2t (figura a destra).
y(t)
y(t)
5
0.3
4.5
0.2
4
0.1
3.5
3
0
2.5
−0.1
2
1.5
−0.2
1
−0.3
0.5
0
0
10
20
30
40
50
60
−0.4
0
10
20
30
40
50
60
Nella figura seguente è invece illustrata l’evoluzione libera del sistema (quindi in assenza di tensione
di ingresso, u(t) = 0) avendo posto come stato iniziale del circuito vC (0− ) = 2 Volt e iL (0− ) = 1
Ampère.
Davide Giglio
Laboratorio di Analisi dei Sistemi 1
Modellazione e Analisi di Reti Elettriche
34
2.5
2
1.5
1
0.5
0
−0.5
Davide Giglio
0
10
20
30
40
50
60
Laboratorio di Analisi dei Sistemi 1