1
ITIS G. CARDANO
Ruote dentate
Le ruote dentate servono per la
trasmissione del moto rotatorio continuo
fra due alberi a distanza ravvicinata, con
assi paralleli, concorrenti o sghembi. I
denti della ruota motrice spingono,
durante la rotazione, i denti della ruota
condotta: quando la prima avanza di un
dente anche la seconda avanza di un
dente; è esclusa così ogni possibilità di
slittamento. Il rapporto di trasmissione
risulta rigorosamente costante e l'entità
degli sforzi trasmessi è limitata solo in
relazione alla resistenza meccanica dei
denti. Vi sono ruote dentate cilindriche
(per le trasmissioni fra assi paralleli o
sghembi) e ruote dentate coniche (per la
trasmissione fra assi concorrenti).
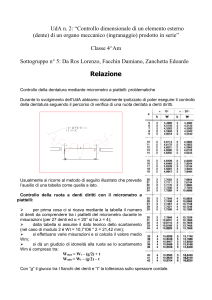
Ruote dentate cilindriche a denti diritti
Durante il movimento di due ruote
dentate cilindriche ingranate si possono
individuare due circonferenze tangenti fra
loro, dette circonferenze primitive,
corrispondenti ai contorni delle ruote di
frizione con lo stesso rapporto di
trasmissione. Le circonferenze primitive
delle due ruote rotolano l'una sull'altra,
ovviamente senza strisciare, con la
stessa velocità periferica.
I denti, intagliati sulla corona della ruota,
si estendono fra due circonferenze
concentriche al cerchio primitivo: la
circonferenza esterna o di troncatura e la
circonferenza interna o di fondo.
La circonferenza di troncatura limita la
sporgenza del dente; la circonferenza di
fondo limita la rientranza del dente. E
tratto del dente compreso fra la
circonferenza primitiva e la circonferenza
di troncatura è detto testa del dente; il
tratto compreso fra la circonferenza
primitiva e la circonferenza di fondo è
detta piede del dente; le altezze dei due
tratti
sono
dette
rispettivamente
addendum e dedendum.
Il numero di denti non può che essere un
numero intero; è anche opportuno che il
diametro primitivo, dal quale dipende la
distanza fra gli assi delle ruote dentate,
sia un numero razionale.
Per evitare di introdurre un numero
irrazionale
nei
calcoli,
il
dimensionamento dei denti si effettua in
funzione del modulo (m):
m=d/z
Nel sistema modulare metrico i moduli
sono unificati:
Moduli da preferire: 0,5 – 1 - 1,125 1,5 – 2 – 3 – 4 – 5 – 6 – 8 – 10 – 12 – 16
– 20 – 25 – 32 – 40 – 50
Moduli possibili: 0,75 – 1 – 1,25 –
1,375 – 1,75 - 2,25 – 2,75 – 3,5 – 4,5 –
5,5 – 7 - 9 - 11 - 14 - 18 - 22 – 28 – 36 –
45
Moduli da evitare: 3,25 – 3,75 – 6,5
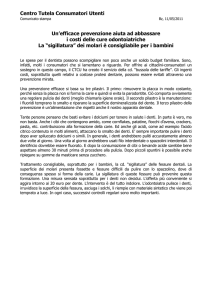
ELEMENTI DI UNA RUOTA DENTATA A DENTI DIRITTI:
d
=
diametro primitivo
de
=
diametro di troncatura
di
=
diametro di fondo
h
=
altezza del dente
a
=
addendum
a’
=
dedendum
s
=
spessore del dente
v
=
vano
p
=
passo.
2
ITIS G. CARDANO
Fissato il modulo della dentatura, le
dimensioni dei vari elementi costruttivi si
determinano mediante le relazioni
riportate nella tabella seguente:
- diametro primitivo
d = mz
- passo
p
=
πm
- addendum
a=m
- dedendum
a’=(7/6)m
- altezza del dente
h = a + a’ =
(13/6)m
- spessore e vano del dente
s=v
= p/2 = πm/2
- lunghezza del dente
b = λ
m = 8 ÷ 12 m
- diametro di troncatura o di testa d e= d
+ 2a = m(z+2)
- diametro interno o di base
di = d –
2(7/6)m
Rapporto di trasmissione
Per rapporto di trasmissione ( τ ) di una coppia di
ruote dentate si intende il rapporto fra la
velocità angolare della ruota motrice e la
velocità angolare della ruota condotta;
essendo le velocità proporzionali ai
rispettivi numeri di giri, si ha:
τ = ω1 / ω2 = n1 / n2 = d2 / d1 = z2 /
z1
dove :
n
= numero di giri;
d
= diametro primitivo delle ruote;
z
= numero di denti;
= velocità angolare;
1
= indica i valori riferiti alla ruota
conduttrice
2
= indica i valori riferiti alla ruota
condotta.
Quando il numero di giri della ruota
condotta è maggiore del numero di giri
della ruota motrice il rapporto di
trasmissione è minore di 1 e l'ingranaggio
è detto moltiplicatore; quando il numero di
gire della ruota condotta è inferiore al
numero di giri della ruota motrice il
rapporto di trasmissione è maggiore di 1
e l'ingranaggio è detto riduttore.
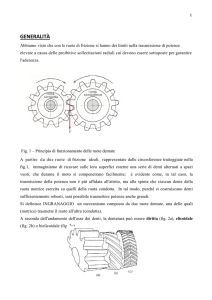
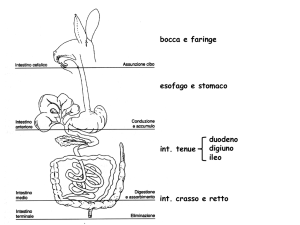
Costanza del rapporto di trasmissione
Nelle ruote dentate il punto di contatto C1
(Figura A) si sposta periodicamente, al
passaggio del dente, sia dalla retta dei
centri sia dalle circonferenze primitive, in
relazione al profilo del dente.
Per ottenere che il rapporto di
trasmissione si mantenga rigorosamente
costante, in modo da evitare il distacco e
la compenetrazione dei denti, è
necessario che, qualunque sia la
posizione del punto di contatto, la linea
d’azione della spinta esercitata dai denti
della ruota motrice sui denti della ruota
condotta passi sempre per il punto di
tangenza C delle due circonferenze
primitive, a distanza dai centri delle ruote
inversamente
proporzionale
ai
corrispondenti numeri di giri. I profili che
soddisfano questa condizione si dicono
coniugati.
Perché i due denti possano mantenersi
costantemente a contatto, è necessario
che il moto relativo sia uno strisciamento
nella direzione della tangente t ai profili
nel
punto
di
contatto
C1;
la
perpendicolare a t passante per C1
incontra la retta dei centri nel punto C e
rappresenta la linea d'azione della forza
trasmessa.
Figura A
COSTANZA DEL RAPPORTO DI TRASMISSIONE
3
ITIS G. CARDANO
In pratica, per motivi di uniformità e
semplicità, si considerano solo due tipi di
profili: il profilo cicloidale e il profilo
evolvente. Questo ultimo, presenta
notevoli
vantaggi
ed
è
oggi
universalmente adottato.
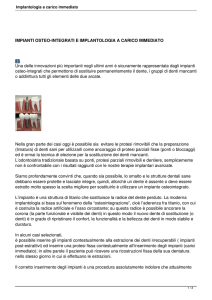
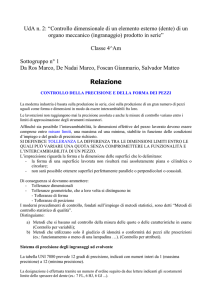
Profilo ad evolvente
L’evolvente è la curva ciclica descritta da
un punto di una retta (epiciclo) che rotola
senza strisciare su una circonferenza
(deferente).
Consideriamo la coppia di denti con
profilo ad evolvente in Figura B. Essendo
C1, il punto di contatto, in base alle
proprietà dell'evolvente la C1A e la C1B
sono normali ai profili dei denti, tangenti
alle circonferenze deferenti di centro 01 e
02 e trovano sulla medesima retta
normale alle superfici di contatto nel
punto C1. Perché il rapporto di
trasmissione risulti costante, la retta
normale alle superfici di contatto deve
passare per il punto C di tangenza delle
due circonferenze primitive. Di fatto nelle
ruote dentate con profilo ad evolvente i
punti di contatto si spostano sulla
tangente comune alle circonferenze
deferenti delle due ruote, passante per il
punto C.
Il luogo geometrico dei punti di contatto
successivi è detto linea d’ingranamento o
d’imbocco.
Figura B DENTI CON PROFILO AD EVOLVENTE
La spinta dei denti è esercitata lungo la
retta normale alle superfici di contatto,
coincidente con la linea d’ingranamento;
ha quindi direzione costante.
L’angolo θ che la direzione costante della
spinta forma con la perpendicolare (c)
alla retta dei centri O1-O2 è detto angolo
di pressione.
le
Minimo numero di denti
Per ottenere ingranaggi riduttori con
rapporti di trasmissione notevolmente alti
ma non troppo ingombranti, la ruota
dentata minore (rocchetto o pignone)
deve avere il minimo numero di denti
possibile tenendo conto che al di sotto di
un certo limite si verifica il fenomeno
dell’interferenza.
Per evitare l’interferenza, indicando con:
(z'): il numero di denti della ruota più
piccola (rocchetto) e con
(z"): il numero di denti della ruota
maggiore,
si dimostra che il numero di denti del
rocchetto non deve in pratica essere
inferiore a:
zmin = 2 /{√[(z"/z')2 + (1 + 2z"/z')sen2θ] –
(z"/z') }
4
ITIS G. CARDANO
Proporzionamento della dentatura
(METODO REULEAUX)
Per semplicità, si può considerare il dente
come una mensola, incastrata ad un
estremo e sollecitata all’estremo libero da
un carico concentrato F, di lunghezza
uguale all’altezza del dente.
Nella maggior parte dei casi sono noti la
potenza P da trasmettere e i numeri di giri
al minuto primo (n) della ruota motrice e
della ruota condotta.
Con questi dati si può determinare il
momento torcente. Indicando la potenza
P in [kW], il momento torcente è dato
dalle seguenti relazioni:
Mt = 955,4 P / n
[daN m]
Mt = 955000 P / n [daN mm]
La forza periferica F è data dal rapporto
fra il momento torcente applicato e il
raggio primitivo della ruota:
F = Mt / r
Il massimo momento flettente nella
sezione d'incastro vale:
Mf = F • (13/6) • m = (Mt / r ) • (13 / 6) •
m
Il modulo di resistenza a flessione è
quello di un rettangolo avente per base
la larghezza del dente
(b = λ m = 8 ÷ 12 m):
Wf = (1/6) λ m (π m / 2)2
L'equazione di stabilita a flessione
assume quindi la forma:
F ( 13/6) m = k’ (1/6) λ m (π m / 2)2
da cui si ricava:
m = ³√(10,5 / λ) • ³√( Mt / K’ • z)
Il coefficiente di proporzionalità λ (λ = b
/ m) è normalmente 10 (può variare da 8
a 12 secondo la velocità periferica).
Queste relazioni sono applicabili sia alla
ruota conduttrice sia alla ruota condotta.
Il modulo così calcolato, espresso in mm,
non risulta in genere un numero intero;
deve quindi essere arrotondato al valore
immediatamente superiore nelle serie dei
moduli unificati.
Il coefficiente dinamico di sicurezza alla
flessione K' varia con il variare della
velocità periferica.
Per il carico di sicurezza le ruote si
distinguono in ruote di forza e ruote di
lavoro. Sono dette ruote di forza quelle
utilizzate per trasmettere forze periferiche
notevoli con velocità periferiche molto
basse (inferiori a 1 m/s). Sono dette
invece ruote di lavoro quelle utilizzate per
la trasmissione del moto a regimi di
rotazione più elevati. Per le prime si
assume K uguale al carico di sicurezza
statico alla flessione; per le seconde si
deve tener conto delle sollecitazioni
dinamiche dovute alla velocità periferica e
K’ si determina mediante formule
empiriche; le più comuni sono le
seguenti:
- ingranaggi lenti e scarsamente precisi:
K’ = K • [3 / (3 + v)];
- ingranaggi veloci e precisi:
K’ = K • [6 / (6 + v)];
- ingranaggi molto veloci e molto precisi :
K’ = K • [5,6 / (5,6 + √v)];
Per la velocità periferica si assume
inizialmente un valore di tentativo; poi ,
calcolati i raggi primitivi
r=mz/2
si valuta se la velocità periferica assunta
è effettivamente accettabile.
Quando il valore calcolato della velocità
periferica
v = 2 π r n / 60
risulta uguale o minore del valore
ipotizzato, il modulo definito si può
ritenere giusto; se invece il valore
calcolato della velocità periferica è
superiore a quello ipotizzato, si deve
ripetere
il
calcolo
del
modulo,
considerando una velocità periferica più
elevata.
5
ITIS G. CARDANO
Proporzionamento della dentatura
(METODO LEWIS)
I denti di un ingranaggio sono
dimensionati
correttamente
quando
presentano al piede una sufficiente
resistenza alla flessione pulsante e
contemporaneamente, sui fianchi, un
valore della pressione specifica inferiore
a quello massimo ammissibile. Il loro
modulo deve essere pertanto definito in
base ai calcoli sia di resistenza a
flessione , sia di resistenza a pressione
specifica.
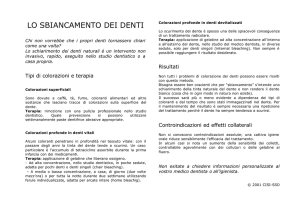
Il dente viene assimilato ad una mensola
incastrata in
corrispondenza
della
circonferenza di piede e caricata
all'estremità libera da una forza (F)
inclinata di un angolo (α) rispetto all'asse
del dente.
CALCOLO DEL MODULO CON IL METODO LEWIS
Dalla figura si ricava che lo sforzo F si
può considerare applicato nel punto in cui
la sua retta d’azione interseca l’asse del
dente e si può scomporre nelle due
componenti F’ (normale all’asse del
dente) e F” (in coincidenza con l’asse del
dente):
F’ = F • sen θ
F” = F • cos θ
Il momento flettente induce nelle fibre di
una parte del dente anche una
sollecitazione a trazione, ma le fibre
maggiormente sollecitate sono quelle
soggette a compressione; ai fini della
resistenza, si considera solo la massima
sollecitazione di compressione.
In una generica sezione del dente si ha:
σ = [(F • cos θ) / (s • b)] + [(6 • x • F •
sen θ) / (s2 • b)]
Come
si
vede, il
valore
della
sollecitazione varia da sezione a sezione
in relazione al variare della distanza (x) e
dello spessore (s).
La sollecitazione massima può essere
calcolata mediante le seguenti formule:
σ
= F / b•m•y
= (2 Mt ) / (λ •m3 • z • y)
dove:
F = forza periferica tangenziale;
b = lunghezza del dente;
m = modulo;
Mt = momento torcente;
z = numero di denti;
λ = rapporto b/m;
y = coefficiente di Lewis che
dipende da numero di denti e angolo
di pressione (vedi tabella).
Questo coefficiente è tanto più piccolo
quanto minore è il numero di denti; il
calcolo si deve quindi effettuare
considerando la ruota della coppia con il
minor numero di denti.
Risolvendo rispetto al modulo (m) si ha:
m = ³√[(2 • Mt ) / (λ • σmax • z • y)]
Per la progettazione, la sollecitazione
massima si pone ovviamente uguale al
carico di sicurezza K’ ; quindi :
m = ³√[(2 • Mt ) / (λ • K’ • z • y)]
Per il calcolo di K’ si procede con gli
stessi criteri già visti per il metodo di
Rouleaux.
Definito il modulo, per il calcolo delle
dimensioni dei denti si applicano le
formule note.
6
ITIS G. CARDANO
123
VALORE DEL COEFFICIENTE y DI LEWIS
z
Θ = 15 °
12
0.210
13
0.220
14
0.226
15
0.236
16
0.242
17
0.251
18
0.261
29
0.273
20
0.283
21
0.289
22
0.292
24
0.298
26
0.307
28
0.314
30
0.320
34
0.327
38
0.336
43
0.346
50
0.352
60
0.358
75
0.364
100
0.371
150
0.377
300
0.383
∞
0.390
Θ = 20°
0.245
0.261
0.276
0.289
0.295
0.302
0.308
0.314
0.320
0.327
0.330
0.336
0.346
0.352
0.358
0.371
0.383
0.396
0.408
0.421
0.434
0.446
0.459
0.471
0.484
Verifica ad usura
Nel caso degli ingranaggi veloci, con
velocità periferiche superiori a 10 ÷ 12
[m/s], è opportuno procedere ad una
verifica del proporzionamento della
dentatura per stabilire se è assicurata
una sufficiente durata di funzionamento,
tenendo conto dell’inevitabile usura dei
denti.
Dato che sull’usura dei denti incide
notevolmente la velocità periferica, la
verifica si effettua sulla ruota di minore
diametro, con la maggiore velocità
angolare, indipendentemente dal fatto
che sia condotta o conduttrice.
Per la determinazione della pressione di
contatto (pcon) [daN/mm2], nel caso più
comune della dentatura ad evolvente con
l’angolo di pressione di 20°, si può
applicare la formula seguente.
pcon = C √[2 Mt (1 + e) / b d2]
dove:
C
=
coefficiente numerico che
dipende dalla natura dei materiali;
acciaio/acciaio C = 151
acciaio/ghisa
C =
ghisa/ghisa
C =
107
Mt = momento torcente [daNmm]
b = larghezza del dente [ mm ]
d
= diametro primitivo della ruota
minore [ mm ]
e = rapporto fra il numero di denti
della ruota minore e il numero di denti
della ruota maggiore.
La pressione massima ammissibile
dipende dalla durezza superficiale dei
denti, dalla frequenza di rotazione della
ruota minore e dalla durata di
funzionamento prevista.
Si può determinare con la formula
seguente:
pmax = 2,5 HB / 6√(n h)
dove:
HB = durezza Brinell del materiale;
n = numero di giri al minuto della ruota
minore;
h = ore di funzionamento previste.
La durata dell’ingranaggio è definita in
relazione
al
funzionamento;
orientativamente si possono considerare
le seguenti durate:
- 130000 ÷ 150000 ore per il
funzionamento continuo;
- 10000 ÷ 30000 ore per il funzionamento
discontinuo;
- 500 ÷ 2000 ore per il funzionamento
saltuario.
La durezza Brinell può essere ricavata
con sufficiente approssimazione dalla
tabella:
- acciai comuni
HB 200 ÷ 250
- ghisa grigia
HB 180 ÷ 200
- ghisa speciale
HB 180 ÷ 240
Se non risulta soddisfatta la condizione
pcon ≤ pmax
si deve ridurre pcon (aumentando la
larghezza della ruota o il diametro
primitivo) o aumentare pmax (aumentando
la durezza del materiale).
Rendimento
delle
cilindriche a denti diritti
ruote
dentate
7
ITIS G. CARDANO
Nelle trasmissioni con ruote dentate, a
causa dello strisciamento fra i denti, si
genera
una
resistenza
d’attrito
direttamente proporzionale alla forza
trasmessa e al coefficiente d’attrito
radente tra i materiali a contatto. La
potenza disponibile sull’albero condotto è
quindi senz’altro inferiore a quella
presente sull’albero motore. La perdita di
potenza è evidentemente tanto maggiore
quanto minore è il rendimento della
coppia cinematica.
Indicando con (z1) e (z2) i numeri di denti
delle due ruote e con (f) il coefficiente
d’attrito radente, si dimostra, (con una
serie di passaggi alquanto laboriosi) che,
per le ruote dentate cilindriche:
η = 1 / {1 + f • π • [(1 / z1) + (1 / z2)]}
Il valore di (f) varia normalmente da 0,15
a 0,25.
In genere il rendimento degli ingranaggi è
elevato; può essere migliorato con
un’efficace lubrificazione fra i denti in
presa.
ITIS G. CARDANO
With the support of the Lifelong Learning Programme of the European
Union. This project has been funded with support from the European
Commission.
8