APPENDICE A:
CONSIDERAZIONI SUL PROGETTO EMC & ESD
MODELLO
MANUALE
12 4 3
a
2 Generazione
Multimode™
CONTROLLER PER MOTORI
©
2002
CURTIS
INSTRUMENTS,
INC.
PROGETTO DI CURTIS PMC DELLA SERIE
1200. CONTROLLER PROTETTO DAL
BREVETTO STATUNITENSE NUM. 4626750.
CURTISINSTRUMENTS,INC.
200 Kisco Avenue
Mount Kisco, NY 10509 USA
Tel: 914-666-2971
Fax:914-666-2188
www.curtisinst.com
Manuale
Rev.
A-8
Manuale
Curtis
1243 GEN 2
1243 GEN 2
A: Ottobre
p/n
37044
2002
APPENDICE D:
SCHEDA TECNICA
APPENDICE D
SCHEDA
Tabella D-1
TECNICA
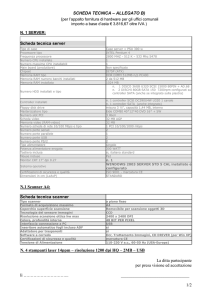
SCHEDA TECNICA: CONTROLLER 1243 GEN 2
Entrata tensione nominale
Frequenza operativa PWM
Isolamento elettrico al dissipatore
24–36 V
16 kHz
500 V ac (minimo)
Voltaggio entrata KSI (minimo)
Corrente di entrata KSI (senza contattori)
16.8 V
78 mA senza programmatore;
120 mA con programmatore 1311 (110 mA con 1307)
Voltaggio di entrata logica
Corrente di entrata logica
>7.5 V High; <1 V Low
15 mA
Gamma temperature ambiente per il funzionam. da -40°C a 50°C (da -40°F a 122°F)
Riduzione sovratemperatura dissipatore
85°C (185°F)
Riduzione sottotemperatura dissipatore
-25°C (-13°F)
Protezione sovravoltaggio
modelli da 24V: riduz. a circa 30V, riduz. a ³34V
modelli da 36V: riduz. a circa 45V, riduz. a ³49V
Protezione sottovoltaggio
modelli da 24V: riduz. a circa 17V, riduz. a ³13V
modelli da 36V: riduz. a circa 25V, riduz. a ³21V
Valore ambientale imballaggio
Peso
IP53
1.45 kg (3.2 lb)
Dimensioni (L × W × H)
198 × 114 × 70 mm (7.8" × 4.5" × 2.8")
Conformità alle regole
Sicurezza, parti applicabili: EN 1175-1:1998
EMC ed EMI: EN 12895:2000
Componente Riconosciuta UL, UL File AU1841
ARMATURA
NUMERO
MODELLO *
VOLTAGGIO
NOMINALE BATTERIA
(volt)
CORRENTE LIMITE
TRASMISSIONE
(amp.)
CAMPO
POTENZIALE
POTENZIALE
2 MIN.
(amp.)
1 ORA
(amp.)
POTENZIALE
2 MIN.
(amp.)
POTENZIALE
1 ORA
(amp.)
CORRENTE
LIMITE DI
FRENAT.
(amp.)
1243-24XX
24
350
350
120
35
20
350
1243-42XX
24–36
200
200
80
25/35†
15/20
200
1243-43XX
24–36
300
300
100
25/35†
15/20
300
* Le ultime due cifre dei numeri del modello 1243GEN2 sono 20 o un valore più alto:
1243-2401, 1243-4202, e 1243-4301 sono controller 1243,
1243-2420, 1243-4221, e 1243-4320 sono controller 1243GEN2.
† I modelli 1243-42XX e -43XX sono disponibili come modelli da 25 amp. o 35 amp.
Manuale
Curtis
1243 GEN 2
D-1
APPENDICE C:
INDICE
INDICE DEI PARAMETRI PROGRAMMABILI
APPENDICE C
INDICE
INDICE DEI PARAMETRI PROGRAMMABILI
1. INFORMAZIONI GENERALI ............................................. 1
I parametri programmabili del controller 1243GEN2 sono elencati qui sotto in ordine alfabetico
(con il nome che compare sul display del programmatore), con riferimenti all’entrata principale
nelmanuale.
21
MAIN
CONT
INTR
pagina
40
ADJ
HRS
HIGH
pagina
45
MAIN
OPEN
DLY
pagina
40
ADJ
HRS
LOW
pagina
45
MAX
FWD
REGEN
pagina
26
ADJ
HRS
MID
pagina
45
MAX
FWD
SPD,
pagina
31
ANTI-TIEDOWN
pagina
41
MAX
LOAD
pagina
27
AUX
DELAY
pagina
28
MAX
REV
REGEN
pagina
26
AUX
TYPE
pagina
28
MAX
REV
SPD,
pagina
31
pagina
50
MIN
FWD
REGEN
pagina
27
pagina
27
ACCEL
RATE,
BATTERY
M1-M4
ADJUST
pagina
M1-M4
VOLTS
M1-M4
BDI
DISABLE
pagina
50
MIN
LOAD
BDI
LIMIT
pagina
50
MIN
REV
REGEN
pagina
27
BDI
LOCKOUT
pagina
51
MOT
WRM
x10mΩ
pagina
44
pagina
23
MOT
HOT
x10mΩ
pagina
44
pagina
24
MOTOR
COMP
pagina
44
pagina
40
POT
FAULT
pagina
38
pagina
31
PUMP
pagina
48
pagina
22
QUICK
START
pagina
21
pagina
23
RESET
VOLTS
pagina
49
SPD
BRAKE
C/L,
BRAKE
RATE,
CONT
M1-M4
M1-M4
DIAG
CREEP
SPEED
CURRENT
DECEL
RATIO
RATE,
M1-M4
VOLTS
Ω
LOW
METER
DIS
TOTL
HRS
pagina
46
RESTRAINT,
M1-M4
pagina
23
DIS
TRAC
HRS
pagina
46
SEQUENCING
DLY
pagina
42
pagina
21
SET
TOTL
HRS
pagina
45
pagina
28
SET
TRAC
HRS
pagina
46
pagina
49
SRO
pagina
42
pagina
47
pagina
46
pagina
47
pagina
46
pagina
25
DRIVE
EM
C/L,
BRAKE
EMPTY
M1-M4
PWM
VOLTS
EMR
DIR
INTR
pagina
43
SRVC
TOTL
EMR
REV
CHECK
pagina
43
SRVC
TOTL
EMR
REV
C/L
pagina
43
SRVC
TRAC
TRAC
HRS
FAULT
CODE
pagina
51
SRVC
FIELD
CHECK
pagina
40
TAPER
FIELD
MAP
pagina
39
THROTTLE
DB
pagina
32
FIELD
MAX
pagina
38
THROTTLE
DECEL
pagina
23
FIELD
MIN
pagina
38
THROTTLE
MAP
pagina
36
pagina
38
THROTTLE
MAX
pagina
34
pagina
49
THROTTLE
TYPE
pagina
32
pagina
48
TRAC
SPD
pagina
47
pagina
41
VARIABLE
BRAKE
pagina
25
FLD
FULL
MAP
START
VOLTS
HOURMETER
TYPE
HPD
HRS
RATE
FAULT
INT
BRAKE
DLY
pagina
28
VOLTAGE
pagina
21
INT
BRAKE
RATE
pagina
26
WARM
pagina
44
pagina
31
LOAD
C-1
COMP
SPEED
Manuale
Curtis
1243 GEN 2
2. INSTALLAZIONE E COLLEGAMENTI ELETTRICI .......... 4
Installazione del Controller ......................................... 4
Collegamenti: Bassa tensione .................................. 6
Collegamenti: Alta tensione ...................................... 6
Collegamenti elettrici: Controller ............................... 7
Collegamenti elettrici: Acceleratore .......................... 9
Accel. potenziometro 5kΩ–0 a 2 fili (“Tipo 1”) .... 10
Presa di corrente asimmetrica 0–5V, potenziometro a 3 fili, ed accel. elettronici (“Tipo 2”) .......11
Accel. potenziometro 0–5kΩ a 2 fili (“Tipo 3”) .... 13
Segnale 0–5V e accel. potenziometro a 3 fili .... 14
Collegamenti elettrici:Uscite per segnalaz. errori .... 14
Collegamenti elettrici: Display Spyglass ................ 15
Collegamenti elettrici: Inversione di emergenza ..... 16
Collegamenti elettrici: Controllo invers. di emergenza...16
Collegamenti elettrici: Driver ausiliario.....................16
Contattore, Interruttori ed altro hardware................. 17
3. PARAMETRI PROGRAMMABILI .................................... 19
Parametro batteria.....................................................21
Battery Voltage ................................................... 21
Parametri accelerazione ......................................... 21
Drive Current Limit, M1–M4 ............................... 21
Acceleration Rate, M1–M4 ................................. 21
Quick Start ......................................................... 21
Current Ratio ..................................................... 22
Parametri frenatura .................................................. 23
Braking Current Limit, M1–M4 ........................... 23
Deceleration Rate, M1–M4 ................................ 23
Throttle Deceleration Rate ................................. 23
Restraint, M1–M4 ............................................... 23
Braking Rate, M1–M4 ......................................... 24
Taper Rate ......................................................... 25
Variable Braking ................................................. 25
Parametri frenatura interblocco ............................... 26
Interlock Braking Rate ........................................ 26
Max. Forward Regen ......................................... 26
Max. Reverse Regen ......................................... 26
Manuale
Curtis
1243 GEN 2
iii
INDICE
APPENDICE B: PROGRAMMATORE 1311
Min. Forward Regen ..........................................
Min. Reverse Regen ..........................................
Max. Load Volts ..................................................
Min. Load Volts ...................................................
Parametri freno elettromagnetico ............................
Aux Type ............................................................
EM Brake PWM .................................................
Aux Delay ...........................................................
Interlock Brake Delay .........................................
Parametri velocità ....................................................
Max. Forward Speed, M1–M4 ............................
Max. Reverse Speed, M1–M4 ............................
Creep Speed ......................................................
Load Compensation ..........................................
Parametri acceleratore ............................................
Throttle Type ......................................................
Throttle Deadband .............................................
Throttle Max .......................................................
Throttle Map .......................................................
Pot Low Fault .....................................................
Parametri campo .....................................................
Min. Field Current Limit ......................................
Max. Field Current Limit .....................................
Field Map Start ...................................................
Field Map ............................................................
Field Check ........................................................
Parametri contattore principale ...............................
Main Contactor Interlock ....................................
Main Contactor Open Delay ..............................
Main Contactor Diagnostics ..............................
Parametri errore sequenziale ..................................
Anti-Tiedown ......................................................
High Pedal Disable (HPD) .................................
Static Return to Off (SRO) ................................
Sequencing Delay..............................................
Parametri inversione di emergenza ........................
Emergency Reverse Current Limit ....................
Emergency Reverse Check ..............................
Emergency Reverse Direction Interlock ............
Parametri protezione motore ...................................
Warm Speed ......................................................
Motor Warm Resistance ....................................
Motor Hot Resistance ........................................
Motor Resistance Compensation ......................
iv
I tasti “segnalibro” vi permettono di tornare indietro velocemente
fino a tre articoli selezionati senza dover navigare all’indietro nella
struttura del menu. Per fissare un “segnalibro”, premete uno di questi
tasti per circa tre secondi, finchè viene visualizzata la schermata di
“Bookmark Set”. Per saltare ad una posizione di “segnalibro” impostata,
premere velocemente il tasto di “segnalibro” appropriato (1, 2, o 3).
Notate che i “segnalibri” non vengono memorizzati in modo permanente
nel programmatore; quando quest’ultimo viene scollegato essi vengono
cancellati.
I tasti “segnalibro” possono essere usati per rendere più semplici
le regolazioni dei parametri. Per esempio, nel regolare il parametro di
“Throttle Deadband”, potreste fissare un “segnalibro” al visualizzatore
“Throttle %” [Monitor > THROTTLE %] ed un altro al parametro di “Throttle
Deadband” [Programma > THROTTLE DB]; in questo modo potete
facilmente saltare tra il visualizzatore ed il parametro.
27
27
27
27
28
28
28
28
28
31
31
31
31
31
32
32
32
34
36
38
38
38
38
38
39
40
40
40
40
40
41
41
41
42
42
43
43
43
43
44
44
44
44
44
MENU DEL PROGRAMMATORE 1311
Ci sono sei menu principali, che a turno portano ai rispettivi sottomenu:
Program — dà accesso ai singoli parametri programmabili (vedi pagina
65).
Monitor — presenta i valori in tempo reale durante il funzionamento del
veicolo (vedi pagina 69).
Faults — presenta informazioni diagnostiche sugli errori del sistema
attivo (vedi pagina 70), dà anche accesso al file di storia diagnostica ed
al modo in cui cancellarlo.
Functions — dà accesso ai comandi di clonazione del controller (vedi
pagina 52) ed al comando di “reset”.
Information — visualizza i dati riguardanti il controller centrale: modello e
numeri di serie, data di fabbricazione, versioni hardware e software, e
descrizione dettagliata di altri dispositivi che potrebbero essere associati
al funzionamento del controller.
Programmer Setup — visualizza i dati riguardanti il programmatore: modello
e numeri di serie, data di fabbricazione, versioni hardware e software,
ed un elenco dei parametri programmabili a cui si può accedere con
questo programmatore particolare.
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
B-2
INDICE
APPENDICE B: PROGRAMMATORE 1311
Parametri contaore ..................................................
Adjust Hours High ..............................................
Adjust Hours Middle ...........................................
Adjust Hours Low...............................................
Set Total Hours ..................................................
Set Traction Hours .............................................
Total Service Hours ............................................
Traction Service Hours ......................................
Total Disable Hours ............................................
Traction Disable Hours ......................................
Traction Fault Speed ..........................................
Service Total ......................................................
Service Traction .................................................
Hourmeter Type .................................................
Pump Meter .......................................................
Parametri indicatore scarica batteria (BDI) .............
Full Voltage .........................................................
Empty Voltage ....................................................
Reset Voltage .....................................................
Battery Adjust .....................................................
BDI Disable ........................................................
BDI Limit Speed .................................................
Parametri codici di errore ........................................
Fault Code .........................................................
BDI Lockout .......................................................
Clonazione del controller .........................................
APPENDICE B
PROGRAMMATORE PORTATILE CURTIS 1311
Il programmatore portatile della Curtis 1311 fornisce al controller
1243 G E N 2 capacità di programmazione, diagnostiche,
e di controllo. L’energia per far funzionare il programmatore viene
fornita dal controller principale per mezzo di un connettore Molex a 4
pin.
Il programmatore comprende un display a cristalli liquidi alfanumerico a
7 linee, chiavi speciali per navigare attraverso il display e modificare i parametri
(+/-), e tre chiavi che possono essere usate come “segnalibri”.
Il programmatore 1311 è facile da usare, con funzioni autoesplicative.
Dopo aver collegato il programmatore, aspettare pochi secondi finchè
esso si avvii e raccolga informazioni dal controller.
Per sperimentare le impostazioni, può essere lasciato inserito mentre
il veicolo viene guidato.
Fig. B-1
Programmatore
portatile Curtis 1311
Display a cristalli liquidi
(alfanumerico a 7 linee)
Tasto di navigazione
(per spostarsi
attraverso i vari menu
del programmatore)
Tasto di modifica
parametri
(per aumentare e
diminuire i valori)
4. VERIFICA DELL’ INSTALLAZIONE ................................ 53
5. REGOLAZIONE PRESTAZIONI DEL VEICOLO ........... 55
Regolazione principale ............................................ 55
Regolazione della corsa utile acceleratore ....... 55
Adattamento del controller al motore................. 58
Regolazione della velocità massima del veicolo
scarico ............................................................... 60
Equalizzazione della velocità veicolo carico/
scarico ............................................................... 61
Messa a punto ......................................................... 62
Risposta in decelerazione ................................. 62
Risposta in accelerazione ................................. 63
Fluidità cambi di direzione ................................. 63
Tasti “segnalibro”
(per saltare facilmente
da un campo all’altro)
B-1
Manuale
Curtis
1243 GEN 2
45
45
45
45
45
46
46
46
46
46
47
47
47
48
48
49
49
49
49
50
50
50
51
51
51
52
Manuale
Curtis
1243 GEN 2
v
INDICE
APPENDICE A: CONSIDERZIONI SUL PROGETTO EMC & ESD
riale di base. Se il contatto ohmico stesso non è continuo, l’efficacia di
schermatura può essere massimizzata sovrapponendo le giunzioni tra
pezzi adiacenti piuttosto che appoggiandole.
L’efficacia di schermatura di un involucro viene ulteriormente ridotta
quando il cavo passa attraverso un foro dell’involucro. L’energia RF
esercitata sul cavo da un campo esterno viene reirradiata all’interno
dell’involucro. Questo meccanismo di accoppiamento può essere ridotto
filtrando il cavo nel punto in cui passa attraverso la superficie di giunzione
dello schermo. Date le considerazioni sulla sicurezza legate alla
connessione di componenti elettriche al telaio o alla struttura nei veicoli
alimentati a batteria, tale filtraggio consisterà solitamente in un induttore
in serie (o branello della ferrite) piuttosto che in un condensatore per
rifasamento. Se viene usato un condensatore, deve avere un valore di
voltaggio e caratteristiche di dispersione che permettano al prodotto
finale di conformarsi alle norme di sicurezza.
I cavi B+ (e B-, se applicabili) che alimentano il pannello di controllo
acceleratore—come per la chiave—dovrebbero essere legati in gruppo
con i cavi acceleratore restanti, così che tutti siano fatti passare insieme.
Se i cavi verso il pannello di controllo sono fatti passare separatamente,
si forma una zona di ciclo più ampia. Zone di ciclo più vaste producono
antenne più efficaci che risultano in prestazioni di immunità inferiori.
Salita rampe ....................................................... 64
6. MENU PROGRAMMATORE ..........................................
Menu del programma 1243GEN2 ..............................
Menu del monitor 1243GEN2 .....................................
Menu degli errori del sistema 1243GEN2 ..................
65
65
69
70
7. DIAGNOSTICA, LOCALIZZAZIONE E RISOLUZIONE
PROBLEMI ....................................................................
Diagnostica del programmatore ..............................
Diagnostica dello Spyglass .....................................
Diagnostica del LED di stato ...................................
Diagnostica del LED di uscita errore.......................
71
71
71
74
75
8. MANUTENZIONE DEL CONTROLLER ........................ 76
Pulizia ...................................................................... 76
Storia diagnostica .................................................... 76
vi
APPENDICE A
Compatibilità elettromagnetica (EMC) ......... A-1
APPENDICE B
Funzionamento del programmatore 1311 ....B-1
APPENDICE C
Indice dei parametri programmabili ............. C-1
APPENDICE D
Scheda tecnica ........................................... D-1
SCARICA
ELETTROSTATICA
(ESD)
I controller del motore Curtis contengono componenti sensibili all’ESD,
ed è quindi necessario proteggerle dai danni dell’ESD. L’immunità della
scarica elettrostatica (ESD) viene ottenuta o fornendo una distanza
sufficiente tra i conduttori ed il mondo esterno così che la scarica non
abbia luogo, o fornendo alla corrente di scarica un persorso prestabilito
in modo tale che il circuito sia isolato dai campi elettrico e magnetico
prodotti dalla scarica. In generale le linee guida presentate sopra per
aumentare l’immunità irradiata garantiscono anche una maggiore
immunità ESD.
Solitamente è più facile evitare che la scarica abbia luogo piuttosto
che deviare il percorso della corrente. Una tecnica fondamentale per la
prevenzione di ESD è di fornire un isolamento abbastanza spesso tra
tutti i conduttori metallici e l’ambiente esterno, così che il gradiente di
voltaggio non superi la soglia richiesta da una scarica per avere luogo.
Se viene usato il sistema di deviazione della corrente, tutte le componenti
metalliche esposte devono essere messe a terra. L’involucro schermato,
se messo a terra nel modo appropriato, può essere usato per deviare
la corrente di scarica. Bisognerebbe notare che la posizione dei fori e
delle giunzioni può avere un impatto significativo sulla soppressione
ESD. Se l’involucro non viene messo a terra, il percorso della corrente
di scarica diventa più complesso e meno prevedibile, specialmente se
sono coinvolti i fori e le giunzioni. Può essere richiesta qualche
sperimentazione per ottimizzare la selezione e la disposizione dei fori,
dei cavi, e dei percorsi di messa a terra. Bisogna prestare molta
attenzione al progetto del pannello di controllo in modo che possa
tollerare una scarica statica.
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
A-3
APPENDICE A:
FIGURE
CONSIDERAZIONI SUL PROGETTO EMC & ESD
Immunità crescente
L’immunità ai campi elettrici irradiati può essere ottenuta o riducendo la
sensibilità generale del circuito o tenendo lontani da quest’ultimo i
segnali indesiderati. Il circuito del controller stesso non può essere reso
meno sensibile, poichè deve percepire ed elaborare accuratamente i
segnali a basso livello dal potenziometro acceleratore. Quindi l’immunità
viene generalmente raggiunta evitando che l’energia esterna rf si accoppi
nel circuito sensibile. Questa energia rf può entrare nel circuito del
controller attraverso percorsi guidati ed irradiati.
I percorsi guidati sono creati dai cavi connessi al controller. Questi
cavi agiscono come antenne e la quantità di energia rf accoppiata in
questi cavi generalmente è proporzionale alla loro lunghezza. I voltaggi
e le correnti rf indotte in ogni cavo vengono applicati al Pin del controller
a cui il cavo è connesso. I controller del motore Curtis comprendono
condensatori di fuga sui cavi acceleratore della piastrina di circuito
stampata per ridurre l’impatto di questa energia rf sul circuito interno. In
alcune applicazioni, i branelli della ferrite possono anche essere richiesti
sui vari cavi per raggiungere i livelli di prestazione desiderati.
I percorsi irradiati vengono creati quando il circuito del controller è
immerso in un campo esterno. Questo accoppiamento può essere
ridotto racchiudendo il controller in una scatola metallica. Alcuni controller dei motori Curtis vengono racchiusi da un dissipatore di calore che
fornisce anche una schermatura attorno al circuito del controller, mentre
gli altri non sono protetti. In alcune applicazioni, chi progetta il veicolo
avrà bisogno di montare il controller all’interno di una scatola schermata
sul prodotto finale. La scatola può essere fatta di qualsiasi metallo,
sebbene acciaio ed alluminio siano quelli più comunemente usati.
La maggior parte delle materie plastiche rivestite non forniscono
una buona schermatura perchè i rivestimenti non sono materiali veri, ma
piuttosto una miscela di piccole particelle di metallo in un legante non
conduttivo. Queste particelle relativamente isolate possono apparire
buone sulla base di una misurazione della resistenza in corrente continua, ma non forniscono un’adeguata mobilità degli elettroni per produrre
un’efficace schermatura. Una placcatura di plastica senza procedimento
elettrolitico produrrà un vero metallo e può quindi essere efficace come
uno schermo rf, ma solitamente è più costoso dei rivestimenti.
Un involucro di metallo senza fori o giunzioni, noto come gabbia di
Faraday, fornisce la migliore schermatura per il materiale e la frequenza
date. Quando vengono aggiunti uno o più fori, le correnti rf che fluiscono
sulla superficie esterna dello schermo, per aggirare il foro, devono
seguire un percorso più lungo rispetto a quello con una superficie
attigua. Quando è richiesta una maggiore “curvatura” di queste correnti,
viene accoppiata più energia alla superficie interna, e quindi l’efficacia
di schermatura viene ridotta. La riduzione di schermatura è una funzione
della più lunga dimensione lineare di un foro piuttosto che dell’intera
superficie. Questo concetto viene spesso applicato ove è necessaria
una ventilazione, nel cui caso molti piccoli fori sono preferibili a pochi fori
più larghi.
Quando si applica questo stesso concetto alle giunzioni tra pezzi
adiacenti o segmenti di una protezione schermata, è importante ridurre
al minimo la lunghezza di queste giunzioni. La lunghezza delle giunzioni
è la distanza tra punti in cui viene fatto un buon contatto ohmico. Questo
contatto può essere fornito da lega per saldature, giunti saldati, o
contatto di pressione. Se viene usato il contatto di pressione, bisogna
fare attenzione alle caratteristiche di corrosione del materiale dello
schermo ed ai processi di resistenza alla corrosione applicati al mateA-2
Manuale
Curtis
1243 GEN 2
FIGURE
Manuale
Curtis
1243 GEN 2
FIG.
1:
Sistema elettronico di controllo dei motori Curtis 1243GEN2.......1
FIG.
2:
Dimensioni di montaggio del sistema di controllo Curtis
1243GEN2...............................................................................4
FIG.
3:
Configurazione standard del collegamento elettrico del
sistema di controllo Curtis 1243GEN2 ...................................7
FIG.
4:
Collegamenti elettirici per acceleratore da 5kΩ–0 (“Tipo .
1”)........................................................................................10
FIG.
5:
Collegamenti elettrici per potenziometro da 20kΩ usato
come acceleratore di segnalazione (“Tipo 1”)....................10
FIG.
6:
Collegamenti elettrici per acceleratori da 0–5V (“Tipo 2”)...11
FIG.
7:
Collegamenti elettrici per acceleratore presa corrente (“Tipo 2”).12
FIG.
8:
Collegamenti elettrici per acceleratore potenziometro a 3 fili (“Tipo
2”).........................................................................................12
FIG.
9:
Collegamenti elettrici per acceleratore elettronico Curtis
ET-XXX (“Tipo 2”) ...............................................................13
FIG.
10:
Collegamenti elettrici per acceleratore da 0–5kΩ (“Tipo .
3”)........................................................................................14
FIG.
11:
Collegamenti elettirci per uscite di segnalazione errori..........15
FIG.
12:
Collegamenti elettrici per il display Spyglass Curtis...........15
FIG.
13:
Mappatura “ramp restraint” per controller concampo min.
impostato a 3 amp., campo max. a 18 amp., e corrente
limite di frenatura a 300 amp...............................................24
FIG.
14:
Parametri del freno elettromagnetico, nel contesto dei ...
quattro parametri di ritardo..................................................29
FIG.
15:
Effetti della regolazione del parametro di “Throttle ..........
Deadband”...........................................................................33
vii
TABELLE
APPENDICE A:
FIG.
16:
CONSIDERAZIONI SUL PROGETTO EMC & ESD
APPENDICE
Effetto della regolazione del parametro di “Throttle Max”....34, 35
A
CONSIDERAZIONI SUL PROGETTO DEL VEICOLO
FIG.
17:
Mappatura acceleratore per controller con velocità massima e
velocità micrometrica regolate rispettivamente a 100% e 0.....36
FIG.
18:
Mappatura acceleratore per controller con velocità massima e
velocità micrometrica regolate rispettivamente a 100% e 10%
...................................................................................................37
FIG.
19:
Mappatura acceleratore per controller con velocità massima e
velocità micrometrica regolate rispettivamente a 90% e 10%
...................................................................................................37
FIG.
20:
Corrente di campo relativa alla corrente dell’armatura, conparametro di
“field map” regolato a 50% e 20% ................................................39
FIG.
21:
Spyglass Curtis 840, modelli a 3 LED e 6 LED .......................73
FIG.
B-1
Programmatore portatile Curtis 1311......................................B-1
RIGUARDO ALLA COMPATIBILITA’ ELETTROMAGNETICA (EMC)
ED ALLA SCARICA ELETTROSTATICA (ESD)
COMPATIBILITA’
viii
1: Valori limite di entrata wiper acceleratore (Pin 6) .......................9
TABELLA
2: Selezione Modi..........................................................................18
TABELLA
3: Opzioni di configurazione: “auxiliary driver”..............................30
TABELLA
4: Tipi di acceleratore programmabili............................................32
TABELLA
5: Voltaggi standard batteria .........................................................50
TABELLA
6: Categorie di errori......................................................................51
TABELLA
7: Tabella di localizzazione e risoluzione problemi.......................72
TABELLA
8: Codici di errori del LED di stato ................................................74
TABELLA
9: Codici categorie errori ..............................................................75
TABELLA
D-1: Scheda tecnica....................................................................E-1
Manuale
(EMC)
Emissioni Decrescenti
La formazione di archi elettrici nelle spazzola del motore può costituire
una fonte significativa di emissioi rf. Queste emissioni possono essere
ridotte installando condensatori di fuga tra i fili del motore e/o tra ogni filo
del motore e la struttura del motore. Se viene usato quest’ultimo sistema,
la tensione nominale di esercizio e le caratteristiche di dispersione dei
condensatori devono essere conformi alle norme di sicurezza riguardanti
le connessioni elettriche tra un circuito a batteria ed il telaio. Il
condensatore di fuga dovrebbe essere installato il più vicino possibile al
motore, o persino al suo interno, per fornire la prestazione migliore. In
alternativa si può installare un branello della ferrite sui fili, il più vicino
possibile al motore. In alcuni casi, sia i condensatori che i branelli della
ferrite possono essere entrambe appropriati. Un’altra alternativa è di
scegliere un motore a spazzole, che produrrà una minore formazione di
archi elettrici verso il commutatore. Le spazzole che sono state sottoposte
a rodaggio per circa 100 ore generano solitamente emissioni più basse
rispetto alle spazzole nuove, perchè si ha una minore formazione di archi
dopo che sono state installate nel modo appropriato.
L’uscita del motore dai controller della Curtis può anche contribuire
alle emissioni rf. Questa uscita è un’onda quadra modulata che ha
l’ampiezza di una pulsazione con tempi abbastanza rapidi di salita e di
discesa e ricchi di armoniche. L’impatto di queste forme d’onda di
commutazione può essere minimizzato rendendo più corti possibile i
cavi elettrici dal controller al motore. I branelli della ferrite installati sui fili
di comando possono ridurre ulteriormente queste emissioni. Per
applicazioni che richiedono emissioni molto basse, la soluzione potrebbe
essere di includere il controller ed intercollegare i fili ed il motore insieme
in una scatola schermata. Le armoniche di guida del motore possono
accoppiarsi ai branelli di alimentazione della batteria ed ai cavi del
circuito acceleratore; quindi in alcune applicazioni i branelli della ferrite
potrebbero essere richiesti anche su questi altri cavi.
TABELLE
TABELLA
ELETTROMAGNETICA
La compatibilità elettromagnetica (EMC) include due aree: emissioni
ed immunità. Le Emissioni sono energia in radiofrequenza (rf) generata
da un prodotto. Questa energia ha il potenziale di interferire con sistemi
di comunicazione come la radio, la televisione, i telefoni cellulari, la
spedizione, l’aereo, ecc. L’Immunità è la capacità di un prodotto di
funzionare normalmente in presenza di energia rf.
L’EMC è fondamentalmente l’emissione di un progetto disistema.
Una parte della prestazione EMC è progettata all’interno o insita in ogni
componente; un’altra parte è progettata all’interno o insita nelle
caratteristiche del prodotto finale come la schermatura, il cablaggio, ed
il layout; ed infine una parte è una funzione delle interazioni tra tutte
queste parti. Le tecniche di progetto presentate qui sotto possono
aumentare la prestazione EMC nei prodotti che usano i controller dei
motori Curtis.
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
A-1
8 — MANUTENZIONE
1 — INFORMAZIONI GENERALI
MANUTENZIONE DEL CONTROLLER
8
Non ci sono parti riparabili dall’utente nel controller Curtis 1243GEN2. Non
tentare di aprire, riparare, o modificare il controller in altro modo in
quanto ciò danneggerebbe il controller stesso e invaliderebbe la garanzia.
Si raccomanda di mantenere il controller pulito e asciutto e di
controllare e cancellare periodicamente il file di storia diagnostica degli
errori.
PULIZIA
La pulizia periodica della parte esterna del controller ne garantisce la
protezione contro la corrosione e i possibili problemi della parte elettrica
dovuti a sporco e prodotti chimici presenti nell’ambiente di lavoro o
normalmente presenti nei sistemi azionati a batteria.
+
ATTENZIONE
1
INFORMAZIONI
Fig. 1 Sistema
elettronico di controllo
dei motori Curtis
1243GEN2
MultiMode™.
I controller Curtis 1243 MultiMode™ di seconda generazione sono
sistemi di controllo della velocità di motori elettrici ad eccitazione
separata, progettati per essere impiegati in piccoli veicoli industriali ed
in attrezzature per la movimentazione di materiali. Questi controller
programmabili sono di facile installazione, efficienti e di spesa contenuta,
inoltre offrono maggiori caratteristiche rispetto al modello 1243 originale.
Quando si lavora con veicoli azionati a batteria, è necessario prendere
adeguate misure di protezione che comprendono, tra le altre, un adeguato
addestramento, protezioni per occhi, ed evitare di indossare vestiti
ampi e gioielli.
Per la manutenzione ordinaria seguire la seguente procedura di pulizia:
1. Sconnettere la batteria per togliere tensione.
2. Scaricare i condensatori nel controller collegando un
carico (come una bobina per contattore o avvisatore
acustico) ai terminali B+ e B- del controller.
3. Rimuovere sporco o corrosione dalle zone del connettore.
Il controller deve essere pulito con un panno umido.
Asciugare prima di ricollegare la batteria. Il controller non
deve essere soggetto a flusso d’acqua pressurizzato da
parte di un tubo standard o di una rondella di potenza.
4. Assicurarsi che le connessioni siano ben strette, ma non
troppo. Per specificazioni sulla massima coppia di
serraggio per le connessioni della batteria e del motore,
vedi Sezione 2, pagina 7.
I controller MultiMode™ 1243GEN2 garantiscono un controllo preciso
della velocità e della coppia dei motori. Uno stadio di controllo “fullbridge” del campo combinato con uno stadio di controllo “half-bridge”
della potenza dell’armatura garantisce una sicura inversione del motore
ed una frenatura a recupero completa senza l’impiego di ulteriori relais
o contattori.
L’imballo e la robusta custodia in IP53 dei controller sono costruiti
per sopportare qualsiasi colpo e vibrazione. Il tipo di superficie rende il
controller 1243GEN2 persino più affidabile del 1243 originale.
Il controller 1243GEN2 è interamente programmabile attraverso il
programmatore portatile Curtis 13XX. L’uso di tale programmatore
garantisce potenzialità diagnostica e di controllo e flessibilità di
configurazione.
FILE DI STORIA DIAGNOSTICA DELL’ERRORE
Il programmatore portatile può essere usato per accedere al file storico
di diagnostica del controller. Il programmatore legge tutti gli errori del
controller dall’ultima cancellazione del file. Gli errori del contattore
possono essere dovuti a cavi allentati; quindi le connessioni elettriche
del contattore devono essere controllate attentamente. Errori come la
temperatura eccessiva possono essere causati da abitudini
dell’operatore o da sovraccarico.
Dopo la diagnosi e la risoluzione del problema, è consigliabile
cancellare il file storico di diagnostica. Questo permette al controller di
accumulare un nuovo file di errori. Controllando il nuovo file in seguito,
sarà possibile stabilire se il problema era stato completamente risolto.
Per istruzioni su come accedere al file di storia diagnostica, vedi
l’Appendice B.
76
GENERALI
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
1
7 — DIAGNOSTICA & LOCALIZZAZIONE ERRORI
1 — INFORMAZIONI GENERALI
Come tutti i sistemi di controllo per motori Curtis, il modello 1243GEN2 garantisce
all’operatore un controllo superiore della velocità del motore del veicolo. Le sue
caratteristiche sono:
DIAGNOSTICA DEL LED DI USCITA DI ERRORE
Il controller 1243GEN2 è dotato di due uscite di errore programmate per
trasmettere le informazioni sugli errori ai LED posizionati sul pannello
del display o su qualunque pannello remoto. Queste uscite possono
essere programmate per visualizzare errori in formato “Fault Code” o
“Fault Category” (vedi Sezione 3, pagina 51).
In formato Fault Code le due segnalazioni errori funzionano
indipendentemente. La linea Errore 1 emette gli stessi codici, e allo
stesso tempo del controller incorporato nel LED di stato (vedi Tabella 8).
La linea Errore 2 mette a terra in presenza di un errore; può essere
utilizzato per azionare un LED a distanza che indica semplicemente se
c’è o non c’è un errore. In caso di assenza di errori, entrambe le linee
sono in condizione normale (positivo).
In formato Fault Category, le due segnalazioni di errore insieme
definiscono una delle quattro categorie, come elencato nella Tabella 9.
In caso si verifichi un errore, le linee Errore 1 e Errore 2 (Pin 2 e 3)
indicano la categoria particolare di errore: LOW/HIGH, HIGH/LOW, o LOW/
LOW. Quando l’errore viene risolto, le uscite errori ritornano nella loro
condizione normale (cioè, HIGH/HIGH).
3 Frenatura interblocco con sensore di carico per garantire la distanza di frenatura
richiesta senza inutili brusche frenate con carichi leggeri.
3 Monitor di manutenzione per preimpostare le ore di funzionamento del veicolo e le
ore di guida come programmate da OEM.
3 Due contaore— ore totali di KSI-abilitato ed ore di trazione—e i rispettivi
timer di manutenzioneinterni al controller.
3 Calcoli BDI eseguiti all’interno del controller.
3 Stime della temperatura del motore basate sulla resistenza di campo e riduzioni
della velocità massima se il motore è surriscaldato.
3 Controlli diagnostici per errori di campo aperto e di corto di campo.
3 Supporti PWM del freno elettromagnetico con corrente continua massima di 2
amp.
3 Supporti acceleratore Tipo 4.
3 Precarica attiva della batteria dei condensatori del controller che allunga la
durata del contattore principale.
Tabella 9
USCITA
ERRORE 1
3 Compatibilità con il programmatore portatile Curtis 1307/1311 per una veloce e
semplice verifica, diagnostica e regolazione dei parametri.
3 MultiMode™ permette quattro modalità di funzionameto del veicolo selezionabili
dall’utente.
USCITA
ERRORE 2
CODICI CATEGORIE ERRORI
CATEGORIA
ERRORE
HIGH
0
(errori non riconosciuti)
LOW
HIGH
1
Errore corrente in derivaz.
Errore sist.di autoeliminaz. guasti hardware
M- in corto
Wiper acceleratore “high” o “low”
Errore cablaggio inversione di emergenza
Avvolgimento campo aperto
Bobina contattore o campo in corto
Contattore principale incollato o mancante
HIGH
LOW
2
Tensione della batteria bassa
Sovratensione
Riduz.term. dovuta a temp.troppo alta/bassa
LOW
LOW
3
Guasto anti-tiedown
Errore pedale alto di disattivazione (HPD)
Errore di ritorno statico su Off (SRO)
Timer di servizio o di disattivazione esaurito
Motore troppo caldo
3 Diagnostica completa grazie al programmatore portatile, il LED distato incorporato
ed il display Spyglass 840 (optional).
3 Frenatura rigenerativa che permette distanze di arresto più corte, aumenta
l’energia utilizzabile dalla batteria e riduce il riscaldamento del motore.
3 Rallentamento automatico al rilascio dell’acceleratore che genera una
sensazione di frenaura a compressione e garantisce una maggiore
sicurezza.
POSSIBILE
HIGH
3 Controllo continuo della corrente dell’armatura, che riduce la formazione di archi
elettrici e l’usura della spazzola.
3 Due uscite per la segnalazione di errori che segnalano la diagnostica a display
montati a distanza.
ERRORE
3 Il freno/guida interblocco è conforme ai requisiti ISO sulla distanza di arresto.
3 La caratteristica di ramp restraint consente una frenatura elettronica
automatica che riduce il movimento del veicolo in posizione di folle.
3 Conformità ai requisiti CEE.
3 Riduzione lineare della corrente guida del motore in caso di sovratemperatura o
tensione insufficiente.
2
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
75
7 — DIAGNOSTICA & LOCALIZZAZIONE ERRORI
1 — INFORMAZIONI GENERALI
3 Riduzione lineare della corrente di frenatura rigenerativa in caso
di sovravoltaggio.
DIAGNOSTICA DEL LED DI STATO
All’interno del controller 1243GEN2 è costruito un LED di stato. E’ visibile
attraverso una finestra nell’etichetta sulla parte superiore del controller.
Questo LED di stato mostra i codici degli errori quando c’è un problema
al controller o alle entrate dello stesso. Durante il funzionamento normale,
in assenza di errori, il LED di stato lampeggia in modo costante. Se il
controller rileva un errore, viene segnalato continuamente un codice di
due cifre per l’identificazione di errore, finchè il problema non viene
risolto. Per esempio, il codice “3,2”—contattore principale inceppato—
appare come:
¤¤¤ ¤¤
¤¤¤ ¤¤
¤¤¤ ¤¤
(3,2)
(3,2)
(3,2)
3 Gli interblocchi di “High Pedal Disable” (HPD) e “Static Return to
off” (SRO) impediscono la perdita di controllo del veicolo al
momento dell’avvio.
3 Circuiti di controllo interni ed esterni assicurano un adeguato
funzionamento del software.
3 Entrate completamente protette e driver delle uscite protetti da
cortocircuiti.
Display Spyglass Curtis modello 840 [optional]
I codici sono elencati nella Tabella 8.
3 Interfaccia di serie a 3 fili.
Tabella 8
CODICI
CODICI DI ERRORI DEL LED DI STATO
LED
3 Sequenze tra il contaore, il BDI, ed i display degli errori.
SPIEGAZIONE
0,1
n
1,1
1,2
¤ ¤
¤ ¤¤
1,3
1,4
¤ ¤¤¤
¤ ¤¤¤¤
2,1
2,2
2,3
¤¤ ¤
¤¤ ¤¤
¤¤ ¤¤¤
2,4
¤¤ ¤¤¤¤
3,1
¤¤¤ ¤
sovracorrente driver contattore o corto avvolgimento di campo
3,2
3,3
3,4
¤¤¤ ¤¤
¤¤¤ ¤¤¤
¤¤¤ ¤¤¤¤
contattore principale incollato
avvolgimento di campo aperto
contattore mancante
4,1
4,2
4,3
¤¤¤¤ ¤
¤¤¤¤ ¤¤
¤¤¤¤ ¤¤¤
4,4
3 Display a cristalli liquidi alfanumerico da 5 mm, ad 8 caratteri e
non retroilluminato per contaore, BDI e messaggi di errore.
mancanza di energia o controller guasto
errore al controller o al microprocessore
LED spento
acceso
¤
3 Display aggiornato da una porta seriale unidirezionale dedicata.
controller funzionante; nessun guasto
3 Disponibile in cassa rotonda da 52 mm, cassa DIN, o come
tavola base, ognuna con un connettore Molex da 8 pin; casse con
sigillo frontale a IP65 e sigillo posteriore a IP40; protezioni contro
colpi e vibrazioni a SAE J1378.
errore sensore di corrente
errore sistema autoeliminazione guasti
dell’hardware
errore M- o corto uscita motore
errore ritorno statico su off (SRO)
3 Temperatura operativa compresa tra -10°C e 70°C; modelli con
gradi di temperatura inferiori disponibili per applicazioni
frigorifere.
errore “wiper high” acceleratore
errore controllo circuito invers. di emerg.
errore pedale alto di disattivaz. (HPD), o
timer scaduto
errore “wiper low” acceleratore
Una buona conoscenza del controller Curtis permette un’installazione ed
un funzionamento corretti dello stesso; è dunque consigliabile una lettura
attenta del presente manuale. Per qualsiasi dubbio contattare il più
vicino ufficio Curtis.
tensione batteria bassa
sovratensione
riduzione dovuta a temperatura troppo
alta o bassa
¤¤¤¤ ¤¤¤¤ errore di anti-tiedown, o mot. surriscaldato
Nota: Viene indicato un errore alla volta, e gli errori non vengono accodati. Per
suggerimenti circa le cause possibili dei vari errori, fare riferimento allo
schema di localizzazione e risoluzione problemi (Tabella 7). Errori di
funzionamento—come errori nell’ordinamento in sequenza SRO—sono
cancellati ruotando l’interruttore dell’interblocco o a chiave.
74
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
3
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Controller
2
7 — DIAGNOSTICA & LOCALIZZAZIONE ERRORI
INSTALLAZIONE E COLLEGAMENTI ELETTRICI
INSTALLAZIONE
DEL
TABELLA DI LOCALIZZAZIONE E RISOLUZIONE PROBLEMI, continua
DISPLAY A CRISTALLI LIQUIDI
LED
DEL PROGRAMMATORE
CATEGORIA DI
ERRORE
CANCELLAZIONE DELL’ERRORE
POSSIBILE CAUSA
CONTROLLER
Il controller può essere disposto in qualsiasi posizione, ma l’ubicazione
deve essere scelta attentamente affinchè esso sia mantenuto il più pulito
e asciutto possibile. In caso tale condizione non possa essere assicurata,
usare una copertura per proteggere il controller dall’acqua e da sostanze
contaminanti. Nella scelta del luogo di installazione occorre tener presente
(1) che l’accesso deve trovarsi nella parte anteriore del controller per
inserire il programmatore nel suo connettore e (2) che il LED di stato
incorporato nel controller sia visibile attraverso l’apertura sull’etichetta
nella parte superiore del sistema.
La Fig. 2 mostra le dimensioni di ingombro e del foro di montaggio
del controller 1243GEN2. Per assicurare piena potenza nominale, il
controller deve essere fissato ad una superficie di metallo pulita e piatta
con tre viti di diametro 6mm (1/4") da inserire negli appositi fori.
Dimensioni di
montaggio del sistema
di controllo Curtis
1243GEN2.
Tabella 7
CODICE
4,1
LOW BATTERY VOLTAGE
2
1. Tensione batt. < riduz. sottotensione
2. Terminale batteria corroso.
3. Batteria o terminale del controller allentati.
Quando la tensione sale
al di sopra del punto di interruzione di sottotensione.
4,2
OVERVOLTAGE
2
1. Tensione batt. > limite arresto per sovratensione.
2. Veicolo che funziona con caricabatteria attaccato.
Quando la tensione cade
al di sotto del punto di interruzione di sovratensione.
4,3
THERMAL CUTBACK
2
1. Temperatura >85°C o < -25°C.
2. Carico eccessivo sul veicolo.
3. Montaggio errato del controller.
Si cancella quando la
temperatura del dissipatore rientra entro una portata
accettabile.
4,4
ANTI-TIEDOWN
3
1. Interruttori di modo in corto a B+.
Rilasciare Selez. Modo 1.
2. Selezione Modo 1 “bloccato” per
selez.Modo 2 o Modo 4 permanentem.
MOTOR HOT
3
1. Resist.di campo > valore programmato Quando resist.< valore
di “Motor Hot”.
programmato.
MOTOR WARM
3
1. Resist.di campo > valore programmato Quando resist.< valore
di “Motor Warm”.
programmato.
Fig. 2
LED DI STATO
Spyglass
Curtis 840, modelli a 3
LED e 6 LED.
Fig. 21
Spyglass a 3 LED
Il LED contaore si illumina quando il
display a cristalli liquidi visualizza i dati del
contaore.
Il LED BDI si illumina quando il display a
cristalliliquidi visualizza il BDI%.
Lampeggia quando il BDI% cala a <10%.
Il LED errore lampeggia per indicare un
errore attivo, ed il codice errore compare
sul display a cristalli liquidi.
Display a cristalli
liquidi a 8 caratteri
La parola “SERVICE” viene visualizzata
quando il tasto è abilitato se uno dei timer
di servizioha terminato.
LED contaore
(verde)
LED BDI (giallo)
LED errore
(rosso)
Spyglass a 6 LED
LED errore
I tre LED BDI verdi funzionano come
(rosso)
istogramma che mostra il BDI% tra 52% e
100%.
Display a cristalli
LED giallo = 36% – 51% BDI.
liquidi a 8 caratteri
LED rosso costante = 20% – 35% B D I
LED rosso lampeggiante = 0 – 19% BDI.
Il LED errore lampeggia per indicare un errore
attivo, ed il codice errore appare sul display a
cristalli liquidi.
La parola “SERVICE” viene visualizzata
quando il tasto è abilitato se uno dei timer di
servizio ha terminato.
rosso
verde
giallo
LED BDI 0 - 100%
Dimensioni in millimetri (e pollici)
4
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
73
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Controller
7 — DIAGNOSTICA & LOCALIZZAZIONE ERRORI
Tabella 7
CODICE
DISPLAY A CRISTALLI LIQUIDI
LED
DEL PROGRAMMATORE
CATEGORIA DI
ERRORE
POSSIBILE CAUSA
CANCELLAZIONE DELL’ERRORE
0,1
NO KNOWN FAULTS
0
n/a
n/a
1,1
CURRENT SHUNT FAULT
1
1. Funzionamento anormale veicolo che
causa picchi di alta corrente.
2. Sensore corrente fuori portata.
3. Guasto del controller.
Ciclo KSI. Se il problema
persiste, sostituire il
controller.
1,2
HW FAILSAFE
1
1. Ambiente rumoroso.
2. Autoverifica o errore di allarme.
3. Guasto del controller.
Ciclo KSI. Se il problema
persiste, sostituire il
controller.
1,3
M- SHORTED
1
1. Corto interno o esterno di M- a B-.
2. Collegamento elettrico motore errato.
3. Guasto del controller.
Controllare il colleg.el.;
ciclo KSI. Se il problema
persiste, sostituire il controller.
1,4
SRO
3
1. Sequenza errata di KSI, interblocco, e
entrate di direzione.
2. Interblocco o circuito interr.direz.aperto.
3. Ritardo sequenziale troppo breve.
4. SRO o tipo accelerat. selez.errato.
5. Potenz. acceleratore regolato male.
Seguire la sequenza
corretta; regolare l’accel.
se necessario; regolare i
parametri programmabili
se necessario.
2,1
THROTTLE WIPER HI
1
1. Cavo entrata accel. aperto o cortocircuitato a B+.
2. Potenz.acceleratore difettoso.
3. Tipo acceleratore selezionato errato.
Quando l’entrata di “Throttle
Wiper High” ritorna ad
una portata valida.
2,2
EMR REV WIRING
1
1. Cavo invers. emerg. o cavo di controllo Riapplicare inv.emerg. o
aperto.
ciclo interblocco.
2,3
HPD
3
1. Sequenza errata di KSI, interblocco,
ed entrate acceleratore.
2. Potenz.acceleratore regolato male.
3. Ritardo sequenz.troppo breve.
4. HPD o tipo acceleratore selez.errato.
5. Potenz.acceleratore regolato male.
Seguire l’esatta sequenza,
regolare l’acceleratore se
necessario; regolare i parametri programmabili se
necessario.
2,4
+
ATTENZIONE
SRVC TOTAL
3
1. Timer di manutenzione tot.esaurito.
Resettare con programm.
SRVC TRAC
3
1. Timer di manutenzione traz.esaurito.
Resettare con programm.
TOTAL DISABLED
3
1. Timer di disattivaz. tot. esaurito.
Resettare con programm.
TRAC DISABLED
3
1. Timer di disattivaz. tot. esaurito.
Resettare con programm.
THROTTLE WIPER LO
1
1. Cavo entrata acceleratore aperto o cortocir- Quando l’entrata di “Throttle
cuitato a B+.
Wiper Low” ritorna ad
2. Tipo acceleratore selezionato errato. una portata valida.
3. Potenz. acceleratore difettoso.
3,1
FIELD SHORT
1
1. Bobina contatt.princip.cortocircuitata.
2. Avvolgim.campo cortocirc. a B+ o B-.
3. Resist. di campo troppo bassa.
Controllare bobina contatt.
e avvolgim.campo; ciclo
KSI.
3,2
MAIN CONT WELDED
1
1. Contatt.principale bloccato.
2. Driver contatt.princip.cortocircuitato.
Controllare colleg.elettr. e
contattore, ciclo KSI.
3,3
FIELD OPEN
1
1. Conness.avvolg.di campo aperta.
2. Avvolgim.di campo aperto.
Controllare colleg.elettr. e
ciclo KSI.
3,4
MISSING CONTACTOR
1
1. Bobina contatt.principale aperta.
2. Contattore principale mancante.
3. Cavo al contatt.principale aperto.
Controllo colleg.elettr.e ciclo KSI.
72
La superficie di installazione deve essere una piastra di
alluminio di 300x300x3 mm (12"x12"x1/8") o simile, soggetta ad un
flusso d’aria minimo di 3 mph per conformarsi ai limiti di impiego
specificati per tempo/corrente. L’uso di un composto termico di
giunzione può migliorare la conduzione termica dal dissipatore del
controller alla superficie di installazione.
Durante il progetto e lo sviluppo del prodotto finale è necessario
accertarsi che la sua prestazione EMC sia conforme alle norme valide;
nell’Appendice A vengono presentati alcuni suggerimenti.
Il controller 1243GEN2 contiene componenti sensibili all’ESD.
Prendere precauzioni appropriate nel connettere, disconnettere, e
maneggiare il controller. Vedere i suggerimenti per l’installazione
presenti nell’Appendice A per proteggere il controller da danni ESD.
TABELLA DI LOCALIZZAZIONE E RISOLUZIONE PROBLEMI
Manuale
Curtis
1243 GEN 2
Lavorare su veicoli elettrici è potenzialmente pericoloso.
L’operatore deve proteggersi contro perdite di controllo, archi di
alta tensione ed esalazioni da batterie al piombo:
PERDITE DI CONTROLLO - Alcune condizioni causano la perdita di controllo
del veicolo. Scollegare il motore o sollevare il veicolo con un martinetto
e staccare le ruote motrici dal terreno prima di operare sui collegamenti
elettrici di comando del motore.
ARCHI DI ALTA TENSIONE — Batterie elettriche del veicolo possono fornire
potenza molto elevata e, se in cortocircuito, possono formarsi degli
archi. Aprire sempre il circuito della batteria prima di operare sul
circuito di comando del motore. Indossare occhiali di protezione e
usare attrezzi adeguatamente isolati per evitare cortocircuiti.
BATTERIE AL PIOMBO — Il caricamento o lo scaricamento generano gas di
idrogeno che possono accumularsi nelle batterie e intorno alle stesse.
Seguire le istruzioni per la sicurezza fornite dal produttore della
batteria e indossare occhiali di protezione.
Manuale
Curtis
1243 GEN 2
5
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Controller
7 — DIAGNOSTICA & LOCALIZZAZIONE ERRORI
COLLEGAMENTI
Collegamenti di bassa tensione
Un connettore a 16 pin Molex a bassa corrente nel controller
fornisce le connessioni di controllo della logica:
Pin 1
Pin 2
Pin 3
Pin 4
Pin 5
Pin 6
Pin 7
Pin 8
Pin 9
Pin 10
Pin 11
Pin 12
Pin 13
Pin 14
Pin 15
Pin 16
7
DIAGNOSTICA, LOCALIZZAZIONE E
RISOLUZIONE PROBLEMI
Il controller 1243GEN2 fornisce informazioni diagnostiche per assistere i
tecnici nei problemi di localizzazione e risoluzione dei problemi del
sistema. Queste informazioni possono essere ottenute osservando il
display apposito sul programmatore portatile, i messaggi di errore
visualizzati sull’indicatore Spyglass, i codici di errore emessi dal LED di
stato, o la visualizzazione degli errori comandata dalle uscite di Errore
1 e 2 del controller. Fate riferimento al grafico di localizzazione e
risoluzione problemi (Tabella 7) per suggerimenti che coprano un’ampia
gamma di errori possibili.
entrata del sensore di carico
[optional]
Uscita Errori 1 / entrata pompa
Uscita Errori 2
uscita del driver del contattore
principale
acceleratore: pot. a 3 fili Pot High
acceleratore: 0–5V Pot Wiper
acceleratore: Pot Low
uscita del driver ausiliario
(tipicamente usata per un freno
elettromagnetico)
entrata Selezione Modo 2
uscita di controllo inversione di
emergenza [optional]
entrata marcia indietro
entrata marcia avanti
entrata inversione di emergenza
entrata Selezione Modo 1
entrata Interlock
entrata interruttore a chiave (KSI)
DIAGNOSTICA
DEL
DIAGNOSTICA
DELLO
Il connettore di accoppiamento è di tipo Molex Mini-Fit Jr. a 16 pin
p/n 39-01-2165 che utilizza terminali di tipo 5556.
ricevere i dati (+5V)
Pin 2
terra (B-)
Pin 3
trasmettere i dati (+5V)
Pin 4
alimentazione +15V (100mA)
Quando viene mostrato un messaggio di errore, il LED rosso di
errore (indicato da un simbolo a chiave) lampeggia per attirare l’attenzione
dell’operatore.
Il display a cristalli liquidi visualizza un avviso anche quando uno dei
timer di servizio si esaurisce. L’avviso di servizio non è considerato un
errore ed il LED rosso di errore non lampeggia. La parola “SERVICE”
viene visualizzata per circa 20 secondi su ogni tasto di accensione,
dopo che il contaore è stato visualizzato.
Lo Spyglass è disponibile nei modelli a 3 LED e a 6 LED; vedi Fig.
21.
Tre morsetti di rame solido stagnati vengono forniti per i collegamenti
alla batteria (B+ e B-) e all’armatura del motore (M-). I cavi sono fissati ai
morsetti con bulloni M8.
Curtis
1243 GEN 2
¤¤¤ ¤¤
(3,2)
CODE 32
Il programmatore portatile è dotato di un connettore a bassa
potenza a 4 pin. E’ possibile ordinare dalla Curtis un kit completo
per il programmatore 1311 con cavo di connessione:
Il connettore a 4 pin può essere usato anche per il display Spyglass. Il display è disinserito quando viene usato il programmatore.
Manuale
¤¤¤ ¤¤
(3,2)
ed il corrispondente messaggio Spyglass è:
Collegamenti di alta tensione
6
SPYGLASS
Il display a cristalli liquidi ad 8 caratteri Spyglass mostra una sequenza
continua di contaore, stato di carica della batteria, e messaggi di errore.
I messaggi di errore vengono visualizzati usando gli stessi codici
fatti lampeggiare dal LED (vedi Tabella 8). Per esempio, il LED lampeggia
3,2 per un contattore principale incollato:
¤¤¤ ¤¤
(3,2)
Pin 1
PROGRAMMATORE
Il programmatore portatile presenta informazioni diagnostiche complete
in un linguaggio semplice. Gli errori vengono mostrati nel “System Faults
Menu”, e lo stato delle entrate/uscite del controller viene mostrato nel
menu del monitor.
Accedendo al “Fault History Menu” del programmatore si ottiene un
elenco degli errori che sono accaduti da quando il file di “storia diagnostica
degli errori” è stato cancellato per l’ultima volta. Si raccomanda di
controllare (e cancellare) il file di “storia diagnostica degli errori” ogni
volta che il veicolo viene sottoposto a manutenzione.
Per informazioni sul funzionamento del programmatore 1311, vedi
l’Appendice B. Se si sta usando il programmatore più vecchio 1307,
fare riferimento alla documentazione esistente.
Manuale
Curtis
1243 GEN 2
71
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Controller
6 — MENU PROGRAMMATORE: Diagnostica/Menu degli Errori
La cassa 1243GEN2 è dotata di fori di fissaggio per i bulloni M8. La
profondità massima dell’ inserimento del bullone sotto la superficie è 1.3
cm (1/2"). I bulloni con una lunghezza superiore a questa possono
danneggiare il controller. La sollecitazione di torsione applicata ai bulloni
non dovrebbe superare i 16.3 N·m (12 ft-lbs).
Sono previsti due terminali di connessione veloci da 1/4" (S1 e S2)
per i collegamenti di tensione inferiore all’avvolgimento del campo del
motore.
MENU DEGLI ERRORI DEL SISTEMA 1243 GEN 2
Questo è un elenco dei possibili messaggi di errore che potrebbero
essere visualizzati dal programmatore. I messaggi sono elencati qui in
ordine alfabetico per una facile consultazione.
ANTI-TIEDOWN
Interruttore di Selezione Modo 1 chiuso all’avvio
FIELD SHORT
Bobina contatt. o corto avvolgim.campo motore
COLLEGAMENTI
CURRENT SHUNT FAULT
HPD
Errore sensore corrente
Errore controllo coll.elettr. invers.di emerg.
Avvolgim. campo motore aperto
Disattiv. pedale alto (HPD) attivata
HW FAILSAFE
Sist. autoeliminaz. guasti dell’hardware attiv.
LOW BATTERY VOLTAGE
MISSING CONTACTOR
Voltaggio batteria troppo basso
M- in corto circuito a BContattore principale incollato
Contattore mancante
In Fig. 3 è rappresentata la tipica configurazione dei collegamenti
elettrici nella maggior parte degli impieghi. Nei veicoli con
conducente a terra l’interruttore dell’interblocco è attivato
generalmente dal timone. Un interruttore di inversione di emergenza
posto sull’impugnatura del timone dà un segnale di inversione.
Per veicoli con conducente a bordo l’interrruttore dell’interblocco
è posto generalmente sull’interruttore a sedile o a pedale e non c’è
inversione di emergenza.
MOTOR HOT
Resist.avvolgim.campo con valore programm. disattiv.
MOTOR WARM
Resist. avvolgim.campo con valore programm. riduz.
NO KNOWN FAULTS
Errori assenti
Voltaggio batteria troppo alto
Ritorno statico su Off (SRO) attivato
Timer di servizio totale esaurito
Timer di servizio di trazione esaurito
Riduz. dovuta a temp.troppo alta/bassa
Entrata wiper acceleratore troppo alta
Entrata wiper acceleratore troppo bassa
Timer di disattivaz. tot. esaurito
Timer di disattivaz. di traz. esaurito
EMR REV WIRING
FIELD OPEN
M- SHORTED
MAIN CONT WELDED
OVERVOLTAGE
SRO
SRVC TOTAL
SRVC TRAC
THERMAL CUTBACK
THROTTLE WIPER HI
THROTTLE WIPER LO
TOTAL DISABLED
TRAC DISABLED
INVERSIONE DI
EMERGENZA
MARCIA IN
AVANTI
MARCIA
INDIETRO
ELETTRICI: Configurazione
SELEZIONE SELEZIONE
MODO 1
MODO 2
Standard
INTERLOCK
ACCEL. POT.
5kW (TIPICO)
FRENO
ELETTROMAGNETICO
BOBINA
CONTATTORE
PRINCIPALE
DIODO
PROTEZIONE
POLARITA’
CONTATTORE
PRINCIPALE
Nota: Se si sta usando il programmatore più vecchio 1307,
il menu degli Errori di Sistema del 1311 è chiamato “Diagnostics
Menu”.
INTERRUTT.
A CHIAVE
FUSIBILE
DI
CONTROLLO
FUSIBILE DI
POTENZA
------Controllo collegamento elettrico inversione di emergenza (optional)
Fig. 3
70
Manuale
Curtis
1243 GEN 2
Configurazione standard del collegamento elettrico del sistema di controllo Curtis 1243GEN2.
Manuale
Curtis
1243 GEN 2
7
6 — MENU PROGRAMMATORE: Menu del monitor/di verifica
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Controller
Collegamento elettrico standard
+
ATTENZIONE
MENU DEL MONITOR 1243 GEN 2
Il collegamento elettrico dell’armatura del motore è diretto, con la
connessione A1 dell’armatura che giunga fino a B+ del controller e la
connessione A2 dell’armatura fino a M-.
I collegamenti di campo del motore (S1 e S2) sono meno ovvi. La
direzione del veicolo in selezione marcia in avanti dipende da come i
collegamenti S1 e S2 ai due terminali di campo del controller sono
eseguiti e da come l’albero del motore è collegato alle ruote motrici
attraverso il gruppo di trasmissione del moto al veicolo. ATTENZIONE: La
polarità delle connessioni S1 ed S2 influenzerà il funzionamento
dell’opzione di inversione di emergenza. Gli interruttori per la marcia in
avanti e la marcia indietro e le connessioni S1 e S2 devono avere una
configurazione tale che il veicolo si allontani dall’operatore quando il
pulsante di inversione di emergenza viene premuto.
BATT VOLTAGE
Lettura acceleratore, come % ad accel. completo
Corrente di campo motore, in amp.
Corrente di armatura motore, in amp.
Ciclo di lav. utile applic. al campo motore, come %
Ciclo di lav. utile applic. all’armat. motore, come %
Stato di carica batteria, come % a carica piena
Voltaggio del sensore di carico, in volt
Voltaggio batteria dei condensatori, in volt
MOT RES x10 mΩ
Resistenza avvolgimento campo motore, in unità di 10-milliohm
THROTTLE %
FIELD CURRENT
ARM CURRENT
FIELD PWM
ARM PWM
BDI %
LOAD VOLTAGE
ATTENZIONE
+TOT SRVC
Collegamento elettrico standard per il controllo
TRAC SRVC X25
La Fig. 3 mostra il collegamento elettrico per gli interruttori ed i contattori
di entrata; i pin vengono identificati a pagina 6. Nella configurazione
standard del collegamento elettrico, il driver ausiliario al Pin 8 viene
usato per guidare un freno elettromagnetico.
La bobina del contattore principale deve essere cablata
direttamente al controller come mostrato in Fig. 3. Il controller verifica la
presenza di errori al contattore e utilizza l’uscita del driver della bobina
del contattore principale per sconnettere la batteria dal controller e dal
motore in caso di altri errori. Se la bobina del contattore principale non
è cablata a pin 4, il controller non può apire il contattore principale in
presenza di errori gravi, perciò il sistema non è conforme alle norme di
sicurezza CEE.
+TRAC SRVC
Temperatura dissipatore di calore, in °C
Ore totali di servizio, in multipli di 25
Ore totali di servizio, in ore
Ore totali di trazione, in multipli di 25
Ore totali di trazione, in ore
FORWARD INPUT
Interr. marcia in avanti: “on/off” [interr. neutro per accel. Tipo 4]
REVERSE INPUT
Interruttore marcia indietro: “on/off”
Interruttore Selezione Modo 1: “on/off”
Interruttore Selezione Modo 2: “on/off”
Interruttore interblocco: “on/off”
Interruttore inversione di emergenza: “on/off”
Contattore principale: “on/off”
Driver ausiliario: “on/off”
Modo di funzionamento: 0–6
HEATSINK TEMP
TOT SRVC X25
MODE INPUT A
MODE INPUT B
INTERLOCK
EMR REV INPUT
MAIN CONT
AUX DRIVER
SYS MODE
[0=neutro, 1=guida, 2=taper di ricup, 3=taper , 4=inv. campo,
5=driver aus. Off, 6=disattiv. (errore maggiore)]
Nota: Se state usando il vecchio programmatore
1307, il menu del monitor del 1311 viene chiamato
“Test Menu”.
8
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
69
6 — MENU PROGRAMMATORE: Menu del Programma
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Acceleratore
COLLEGAMENTI
Note al Menu del Programma
Tipi acceleratore (per dettagli, vedi Connessioni elettriche acceleratore
nella Sezione 2)
1
Tipo 1: potenziometri 5kΩ–0
Tipo 2: potenziometro asimmetrico da 0–5V a 3 cavi, presa di corrente,
e acceleratore elettronico
Tipo 3: potenziometri da 0–5kΩ
Tipo 4: acceleratori potenziometro bidirezionale da 0–5V e a 3 cavi
Tipi di HPD (per dettagli, vedi Sezione 3: “Parametri Programmabili”,
pagina 41)
2
Tipo 0: HPD escluso
Tipo 1: errore HPD a meno che entrate KSI e interblocco siano ricevute
prima di una richiesta acceleratore >25%
Tipo 2: errore HPD a meno che l’entrata KSI venga ricevuta prima di una
richiesta acceleratore >25%
Tipi SRO (per dettagli, vedi Sezione 3: “Parametri Programmabili”, pagina
42)
3
Tipo 0: SRO escluso
Tabella 1
TIPO DI
ACCELERATORE
1 (5kΩ–0)
Tipo 2: errore SRO a meno che entrata KSI + entrata interblocco (in
quest’ordine) siano ricevute prima che venga selezionata una direzione
Voltaggio Wiper
3 (0–5kΩ)
Wiper
Voltaggio Wiper
Resistenza
4 (0–5V)
Wiper
Voltaggio Wiper
Resistenza
Note:
Tipi di driver ausiliari (per dettagli, vedi Tabella 3, pagina 30)
Wiper
Voltaggio Wiper
Resistenza
Tipo 3: errore SRO a meno che entrata KSI + entrata interblocco +
entrata di direzione in avanti siano ricevute in quest’ordine; un’entrata
di direzione all’indietro può essere ricevuta in ogni punto della sequenza.
4
PARAMETRO
Resistenza
2 (0–5V)
Tipo 1: errore SRO a meno che entrata KSI + entrata interblocco siano
ricevute prima che venga selezionata una direzione
ELETTRICI: ACCELERATORE
Nella tabella sottostante viene descritto il cablaggio per i vari tipi di
acceleratore. Nel menu di programmazione del programmatore
portatile essi sono classificati come Tipo 1, Tipo 2 e Tipo 3. NOTA:
Nel testo gli acceleratori sono identificati dal loro valore nominale e
non dalla loro corsa utile reale.
Acceleratori adatti per essere usati con il controller 1243GEN2
comprendono acceleratori a due fili da 5kΩ–0 (“Tipo 1”); acceleratori da
0–5V, presa di corrente, acceleratori potenziometro a tre fili, e acceleratori
elettronici cablati per funzionamento asimettrico (tutti di “Tipo 2”);
acceleratori a due fili da 0–5kΩ (“Tipo 3”), e acceleratori potenziometro
da 0–5V e a tre fili cablati per funzionamento a segnale (“Tipo 4”). Le
specifiche di funzionamento per questi tipi di acceleratori sono riassunte
nella Tabella 1. Far riferimento alla Sezione 3, “Parametri Programmabili”,
per informazioni sugli effetti dei parametri di Throttle Deadband e
Throttle Max sulle soglie minime e massime dell’acceleratore.
Nel caso si intenda utilizzare un acceleratore diverso, contattare
la sede Curtis più vicina.
Wiper
VALORI LIMITE DI ENTRATA WIPER ACCELERATORE
ERRORE
MASSIMO
ACCELERATORE
THROTTLE
DEADBAND
(0% di velocità
richiesta)
HPD
(25% corsa utile
acceleratore)
5.00 V
7.50 kΩ
3.80 V
5.50 k Ω
2.70 V
3.85 k Ω
0.20 V
0 kΩ
0.06 V
—
0.06 V
—
0.20 V
—
1.50 V
—
5.00 V
—
5.80 V
—
0.06 V
—
0.20 V
0 kΩ
1.30 V
1.65 k Ω
3.80 V
5.50 k Ω
5.00 V
7.50 k Ω
3.10 V (av.)
1.90 V (ind.)
4.40 V (av.)
0.60 V (ind.)
4.50 V
—
—
—
0.50 V
—
2.50 V (av.) *
2.50 V (ind.) *
—
ERRORE
THROTTLE MAX
MINIMO
(modulazione al
ACCELERATORE
100%)
I valori limite di Throttle Deadband e Throttle Max sono validi per potenziometri
nominali da 5kΩ o per prese da 5V con tarature standard fissate rispettivamente
a 0% e 100%. Questi valori limite cambiano in base alle variazioni apportate alle
tarature dei parametri di Throttle Deadband e Throttle Max.
La soglia dell’HPD corridsponde al 25% della corsa utile dell’acceleratore e
dipende dalle tarature fissate per Throttle Deadband e Throttle Max (che definiscono
la corsa utile).
Il voltaggio del wiper è misurato rispetto a B-.
La resistenza del wiper è misurata tra pot low e pot wiper. Il potenziometro deve
essere scollegato dal controller quando si procede a tale misurazione.
* Con una taratura di Throttle Deadband dello 0%, non c’è alcun punto
neutro su un acceleratore di Tipo 4. Si raccomanda una taratura di
Throttle Deadband almeno dell’8% per acceleratori di Tipo 4.
68
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
9
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Acceleratore
6 — MENU PROGRAMMATORE: Menu del Programma
Acceleratore 5k Ω –0 (“Tipo 1”)
Menu del Programma,
L’acceleratore da 5kΩ–0 (chiamato “Tipo 1” nel menu di programmazione
del programmatore 13XX) è di tipo resistivo a 2 fili e funge da collegamento
tra Pot Wiper e Pot Low (Pin 6 e 7), come mostrato in Fig. 4. Non è
importante quale cavo arrivi a quale pin. Per acceleratori di Tipo 1 la
velocità 0 corrisponde a 5kΩ, misurata tra due pin, e la massima velocità
corrisponde a 0Ω. (NOTA: Questo collegamento elettrico è mostrato nel
diagramma standard dei collegamenti elettrici, Fig. 3).
Collegamenti
elettrici per
acceleratore da 5kΩ–0
(“Tipo 1”).
Fig. 4
ADJ HRS HIGH
Contaore preregolato su byte basso: 0–99
Contaore preregolato su byte medio: 0–99
Contaore preregolato su byte alto: 0–99
SET TOTL HRS
Applicare valori preregolati al contaore tot.: “On” o “Off”
SET TRAC HRS
Applicare valori preregolati al contaore traz.: “On” o “Off”
HOURMETER TYPE
SRVC TOTL HRS
Contaore totale è il display di errore: “On” o “Off”
Regolazione timer di servizio tot., in centinaia di ore
SRVC TRAC HRS
Regolazione timer di servizio traz., in centinaia di ore
SRVC TOTL
DIS TRAC HRS
Timer di servizio totale di ripristino: “On” o “Off”
Timer di servizio traz. di ripristino: “On” o “Off”
Regolazione timer di disattivaz. totale, in ore
Regolazione timer di trazione totale, in ore
TRAC FAULT SPD
Max. velocità guida se il timer disattiv. si esaurisce, come %
BDI LIMIT SPD
Max. velocità guida con BDI disattivato, come %
WARM SPEED
Max. vel. guida se resist. Mot.Caldo supera val. programm., come %
MOT WRM x10 mΩ
Valore programm.resist.di campo per Vel.Calda, in unità di 10-milliohm
MOT HOT x10 mΩ
Resist. di campo a cui non c’è uscita guida, in unità di 10-milliohm
MOTOR Ω COMP
Abilitare reazione riduz./interruz. a sovratemp.motore: “On” o “Off”
MAX REV REGEN
Max. corr. a ricup. di frenat. intk. indietro, max. carico, in amp.
MAX FWD REGEN
Max. corr. a ricup. di frenat. intk. in avanti, max. carico, in amp.
MIN REV REGEN
Max. corr. a ricup. di frenat. intk. indietro, min. carico, in amp.
MIN FWD REGEN
Max. corr. a ricup. di frenat. intk. in avanti, min. carico, in amp.
MAX LOAD VOLTS
Voltaggio del sens. di carico per max. corrente a ricup. in volt
MIN LOAD VOLTS
Voltaggio del sens. di carico per min. corrente a ricup. in volt
INT BRAKE DLY
Rit. prima che freno E-M sia applicato, dopo che interr. intk si apre, in sec.
FAULT CODE
Codice errore: “On” o “Off”
EM BRAKE PWM
Permette modulazione di uscita driver frenat.: “On” o “Off”
FIELD CHECK
Errore verrà reg. se scoperto apert. nel campo: “On” o “Off”
PUMP METER
Permette uso Pin 2 come entr. per contaore pompa: “On” o “Off”
ADJ HRS LOW
ADJ HRS MID
Entrata Pot Wiper (Pin 6)
VELOCITA’
SUPERIORE
Entrata Pot Low (Pin 7)
SRVC TRAC
DIS TOTL HRS
Oltre ad ospitare l’acceleratore 5kΩ-0 di base, l’acceleratore
Tipo 1 è il più adatto per attuare un potenziometro bidirezionale.
Usando un potenziometro da 20kΩ-0 cablato come mostrato in
Fig. 5, il wiper può essere tarato in modo che il controller abbia
5kΩ tra i pin 6 e 7 con l’acceleratore in folle. Il meccanismo
dell’acceleratore può essere progettato in modo che la rotazione
in avanti o indietro diminuisca la resistenza tra i pin 6 e 7,
aumentando così l’uscita del controller. Il meccanismo
dell’acceleratore deve fornire segnali alle entrate di marcia
avanti e marcia indietro del controller indipendentemente dalla
resistenza del potenziometro dell’acceleratore. Il controller non
percepisce la direzione dalla resistenza del potenziometro.
Collegamenti
elettrici per
potenziometro da
20kΩ usato come
acceleratore di
segnalazione
(“Tipo 1”).
Fig. 5
Entrata Pot Low (Pin 7)
VELOCITA’
SUPERIORE
Entrata Pot Wiper (Pin 6)
VELOCITA’
SUPERIORE
continua
Il controller fornisce una protezione contro i cavi rotti
percependo il flusso di corrente dall’entrata del wiper attraverso
il potenziometro e nel pin Pot Low. Se la tensione dell’entrata del
Pot Low scende sotto 0.65 mA o il voltaggio è inferiore a 0.06V,
si genera un errore dell’acceleratore ed il controller viene
disattivato. NOTA: Il pin del Pot Low (Pin 7) non deve essere
messo a terra (B-).
10
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
67
6 — MENU PROGRAMMATORE: Menu del Programma
THRTL DEADBAND
Velocità max. indietro Modo 2, come % uscita guida
Velocità max. indietro Modo 3, come % uscita guida
Velocità max. indietro Modo 4, come % uscita guida
Velocità micrometrica, come % uscita guida
Tipo entrata acceleratore 1
Zona morta acceleratore, come %
THROTTLE MAX
Entrata accel. richiesta per 100% uscita guida,come %
THROTTLE MAP
Uscita guida con 50% entrata acceleratore, come %
FIELD MIN
FIELD MAX
Corrente di campo minima, in amp.
Corrente di campo massima, in amp.
FLD MAP START
Corrente armatura a cui mappat. campo fa effetto, in amp.
FIELD MAP
SEQUENCING DLY
Regolaz.mappatura corrente di campo, come %
Rapporto corrente: fattore di 1, 2, 4, o 8
Frenatura di restrizione Modo 1, in amp.
Frenatura di restrizione Modo 2, in amp.
Frenatura di restrizione Modo 3, in amp.
Frenatura di restrizione Modo 4, in amp.
Compensazione di carico: 0 a 25% uscita guida
Pedale alto disabilitato (HPD) tipo 2
Ritorno statico su “off” (SRO) tipo 3
Ritardo sequenziale, in secondi
MAIN CONT INTR
Contatt. princip. che usa entrata interblocco: “On” o “Off”
MAIN OPEN DLY
EMPTY VOLTS
Ritardo apertura contatt. principale: “On” o “Off”
Diagnostica contattore: “On” o “Off”
Tipo driver ausiliario 4
Ritardo apertura driver ausiliario, in secondi
Corrente limite inversione di emergenza, in amp.
Controllo cablaggio invers. di emerg.: “On” o “Off”
Interblocco inversione direz. emerg.: “On” o “Off”
Frenatura variabile: “On” o “Off”
Anti-tiedown: “On” o “Off”
Guasto potenziometro: “On” o “Off”
Voltaggio considerato a stato di carica 100%, in volt
Voltaggio considerato a stato di carica 0%, in volt
RESET VOLTS
Voltaggio a cui lo stato di carica resetta al 100%, in volt
BATTERY ADJUST
Regolazione algoritmo BDI per compensare capacità batteria, in sec.
BDI LOCKOUT
Uscita Errore 2 alta quando BDI%=0: “On” o “Off”
BDI DISABLE
Batteria s-o-c <1% richiama velocità limite BDI: “On” o “Off”
M2 MAX REV SPD
M3 MAX REV SPD
M4 MAX REV SPD
CREEP SPEED
THROTTLE TYPE
CURRENT RATIO
M1 RESTRAINT
M2 RESTRAINT
M3 RESTRAINT
M4 RESTRAINT
LOAD COMP
HPD
SRO
CONT DIAG
AUX TYPE
AUX DELAY
EMR REV C/L
EMR REV CHECK
EMR DIR INTR
VARIABLE BRAKE
ANTI-TIEDOWN
POT LOW FAULT
FULL VOLTS
66
0–5V, presa di corrente, potenziometro a 3 fili,
ed acceleratori elettronici (“Tipo 2”)
continua
Manuale
Curtis
1243 GEN 2
Con questi acceleratori (chiamati “Tipo 2” nel menu di
programmazione) il controller cerca un segnale di voltaggio all’entrata
del wiper (Pin 6). La velocità 0 corrisponde a 0V e la velocità
massima a 5V (misure relative a B-). La presa di voltaggio, di
corrente, il potenziometro a tre fili o l’acceleratore elettronico
possono essere usati con questa programmazione. Il collegamento
elettrico per ognuno è leggermente diverso e ciascuno ha livelli
variabili di identificazione di errori dell’acceleratore ad essi associati.
Acceleratore 0–5V
La Fig. 6 mostra due modi per cablare l’acceleratore 0-5V. La
corsa utile di questo acceleratore varia da 0.2 V (conThrottle
Deadband a 0%) a 5.0 V (con Throttle Max a 100%), misurati in
rapporto a B-.
Collegamenti
elettrici per acceleratori
da 0–5V (“Tipo 2”).
Fig. 6
Presa da 0–5V con riferimento al sensore
Presa da 0–5V
con riferimento a terra
Entrata 0-5V (Pin 6)
SENSORE
Menu del Programma,
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Acceleratore
Entrata 0-5V (Pin 6)
USCITA SENSORE (0-5V)
Entrata Pot Low (Pin 7)
SENSORE TERRA
Tarat. Errore Pot.Low =
OFF
Gli acceleratori da 0-5V con riferimento al sensore devono
fornire una corrente Pot Low superiore a 0.65 mA per impedire
l’arresto dovuto a errori del potenziometro. La corrente massima di
Pot Low deve essere limitata a 55 mA per non danneggiare i
collegamenti elettrici dello stesso.
Per gli accelleratori da 0-5V con riferimento a terra il parametro
di errore del Pot Low deve essere fissato su “Off” ( vedi Sezione 3,
pagina 38) altrimenti il controller registrerà un errore dell’acceleratore
e si fermerà. Per questo tipo di acceleratori il controller scopre
interruzioni aperte nell’ingresso del wiper, ma non garantisce una
protezione completa dagli errori dell’acceleratore. Inoltre, il controller riconosce il voltaggio tra il wiper e B- come voltaggio
dell’acceleratore e non quello dalla presa di voltaggio relativa
all’ingresso del Pot Low.
Per entrambe le entrate dell’acceleratore, nel caso l’entrata
dell’acceleratore da 0-5V (Pin 6) superi 5.5 V rispetto a B-, il
controller registra un errore e si arresta.
Manuale
Curtis
1243 GEN 2
11
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Acceleratore
6 — MENU PROGRAMMATORE: Menu del Programma
Prese di corrente come acceleratori
Una presa di corrente può essere usata anche come entrata
dell’acceleratore, cablato come mostrato in Fig. 7. Una resistenza,
Racceleratore è utilizzata per convertire il valore della presa corrente in
un voltaggio. La resistenza deve essere opportunamente
dimensionata per fornire una variazione di segnale 0-5V sull’intero
campo di misura della corrente.
Il parametro di errore Pot Low (vedi Sezione 3, pag. 38) deve
essere fissato a “Off”, altrimenti il controller registrerà un errore
dell’acceleratore e si arresterà. Il costruttore del veicolo deve
garantire l’identificazione di errori dell’acceleratore usando una
presa di corrente come acceleratore.
Collegamenti
elettrici per
acceleratore presa
corrente (“Tipo 2”).
6
MENU
I programmatori portatili universali della Curtis vi permettono di
programmare, verificare, e diagnosticare i controller programmabili
della Curtis. Per informazioni riguardo al funzionamento del
programmatore 1311, far riferimento all’Appendice B. Se si sta usando
il più vecchio programmatore 1307, consultare se necessario la
documentazione esistente.
Prestare attenzione al fatto che, a seconda del modello specifico
di 1243GEN2 che avete, alcune delle voci del menu potrebbero non
apparire.
MENU DEL PROGRAMMA 1243 GEN 2
Fig. 7
QUICK START
Voltaggio nominale della batteria, in volt
Corrente limite di azionamento Modo 1, in amp.
Corrente limite di azionamento Modo 2, in amp.
Corrente limite di azionamento Modo 3, in amp.
Corrente limite di azionamento Modo 4, in amp.
Corrente limite di frenatura Modo 1, in amp.
Corrente limite di frenatura Modo 2, in amp.
Corrente limite di frenatura Modo 3, in amp.
Corrente limite di frenatura Modo 4, in amp.
Valore di accelerazione Modo 1, in secondi
Valore di accelerazione Modo 2, in secondi
Valore di accelerazione Modo 3, in secondi
Valore di accelerazione Modo 4, in secondi
Valore di decelerazione Modo 1, in secondi
Valore di decelerazione Modo 2, in secondi
Valore di decelerazione Modo 3, in secondi
Valore di decelerazione Modo 4, in secondi
Tempo transizione alla mod. di frenat., in secondi
Valore di frenatura Modo 1, in secondi
Valore di frenatura Modo 2, in secondi
Valore di frenatura Modo 3, in secondi
Valore di frenatura Modo 4, in secondi
Valore di frenatura interblocco, in secondi
Partenza veloce acceleratore
TAPER RATE
Valore variaz. polarità di campo al cambio direz.: 1- 20
M1 MAX FWD SPD
Velocità max. avanti Modo 1, come % uscita guida
Velocità max. avanti Modo 2, come % uscita guida
Velocità max. avanti Modo 3, come % uscita guida
Velocità max. avanti Modo 4, come % uscita guida
Velocità max. indietro Modo 1, come % uscita guida
VOLTAGE
Entrata 0-5V (Pin 6)
M1 DRIVE C/L
PRESA
M2 DRIVE C/L
acceleratore
M3 DRIVE C/L
Taratura errore Pot
Low = OFF
Collegamenti
elettrici per
acceleratore
potenziometro a 3 fili
(“Tipo 2”).
Fig. 8
M4 DRIVE C/L
M1 BRAKE C/L
Acceleratore potenziometro a 3 fili (1kΩ –10kΩ )
Può essere utilizzato un potenziometro a tre fili con un valore di
resistenza assoluto compreso tra 1kΩ e 10kΩ e cablato come in
Fig. 8. Il potenziometro è usato nella sua modalità di divisore di
voltaggio, con presa di voltaggio e ritorno forniti dal controller
1243GEN2. Pot High (Pin 5) fornisce una fonte di corrente di 5V al
potenziometro, e il Pot Low (Pin 7) fornisce la linea di ritorno. Nel
caso venga impiegato un potenziometro a 3 fili e il parametro di
errore Pot Low (vedi Sezione 3, pag. 38) è fissato a “On”, il
controller fornirà una protezione completa dell’errore acceleratore
secondo le norme CEE. NOTA: Il Pin di Pot Low (Pin 7) non deve
essere fissato a terra (B-).
M2 BRAKE C/L
M3 BRAKE C/L
M4 BRAKE C/L
M1 ACCEL RATE
M2 ACCEL RATE
M3 ACCEL RATE
M4 ACCEL RATE
M1 DECEL RATE
M2 DECEL RATE
M3 DECEL RATE
M4 DECEL RATE
THROTTLE DECEL
Uscita Pot High (Pin 5)
VELOCITA’
SUPERIORE
M1 BRAKE RATE
M2 BRAKE RATE
M3 BRAKE RATE
Entrata Pot Wiper (Pin 6)
M4 BRAKE RATE
INT BRAKE RATE
Entrata Pot Low (Pin 7)
M2 MAX FWD SPD
M3 MAX FWD SPD
M4 MAX FWD SPD
M1 MAX REV SPD
12
Manuale
Curtis
1243 GEN 2
PROGRAMMATORE
Manuale
Curtis
1243 GEN 2
65
5 — REGOLAZIONE PRESTAZIONI DEL VEICOLO
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Acceleratore
Se la transizione è troppo brusca: aumentare il valore di
“Taper Rate” e/o impostate il parametro di “Variable Braking” su “On”. Ulteriori regolazioni possono essere fatte
aumentando il valore di “Accel Rate”.
FASE 3. Se la transizione è troppo lenta: diminuire il “Taper Rate”
ed impostate la “Creep Speed” al 5% o ad un valore più
alto. Ulteriori regolazioni possono essere fatte diminuendo il valore di “Accel Rate”, aumentando il “Current
Ratio”, o aumentando il valore del parametro di “Quick
Start”.
Acceleratore Elettronico Curtis ET-XXX
Il Curtis ET-1XX fornisce una tensione da 0-5V ed entrate di
marcia avanti/marcia indietro per il controller 1243GEN2. Il
collegamento elettrico per il ET-1XX è mostrato in Fig. 9. Quando
si utilizza un acceleratore elettronico, il parametro di errore del Pot
Low ( vedi Sezione 3, pag.38) deve essere fissato a “Off”, altrimenti
il controller registrerà un errore dell’acceleratore e si arresterà.
FASE 2.
8
Salita rampe
La risposta del veicolo a pendenze crescenti come le banchine di carico
può essere regolata per mezzo del parametro di “Field Map”. Una
diminuzione di tale parametro permette velocità maggiori del veicolo
durante la salita delle rampe, ma ha anche l’effetto di ridurre la capacità
del controller di generare la coppia alle velocità medie del veicolo.
FASE 1. Se si desidera una velocità maggiore del veicolo durante
la salita delle rampe, diminuire il valore del parametro della
“Field Map” fino ad ottenere la velocità desiderata di salita
delle rampe. Va sottolineato il fatto che se la potenzialità
della coppia del motore viene superata nelle condizioni di
carico e su pendenze, la velocità del veicolo verrà limitata
dalla capacità del motore e la velocità desiderata potrebbe
non essere raggiunta. Il sistema troverà un punto di
compromesso in cui viene generata una coppia del motore
sufficiente a salire la rampa ad una velocità accettabile. Se
il valore del parametro di “Field Map” viene ridotto a 0% ma
la velocità desiderata non viene ancora raggiunta, il sistema
è limitato dalla scarsa coppia del motore in queste
condizioni operative. ATTENZIONE: prestate attenzione
quando riducete il parametro di “Field Map”, poichè a
valori bassi è possibile che il motore venga fatto funzionare
al di fuori della sua zona di sicurezza.
FASE 2. Se il sistema di trasmissione non crea una coppia sufficiente
a far sì che un veicolo completamente carico salga la
rampa desiderata, cercate di aumentare i parametri di
“Field Map”, “Field Max”, e/o “Drive Current Limit”. Deve
essere però valutata l’incidenza di un aumento di questi
valori di parametro sulle altre caratteristiche di guida. Un
aumento del “Field Max” fornirà più corrente di campo, ed
un aumento del “Drive Current Limit” fornirà una maggiore
corrente dell’armatura. Se il “Field Max” è fissato al limite
specificato dal costruttore ed il “Drive Current Limit” è
impostato al massimo, la velocità di salita del veicolo su
per la rampa è limitata dal motore o dal sistema di
ingranaggi del veicolo e non può essere aumentata
sintonizzando il controller. NOTA: Per stabilire se la corrente
dell’armatura del controller si trova al valore stabilito durante la salita della rampa, leggere “Arm Current” nel menu
del monitor del programmatore.
64
Manuale
Curtis
1243 GEN 2
Collegamenti
elettrici per
acceleratore
elettronico Curtis ETXXX (“Tipo 2”).
Fig. 9
Taratura errore Pot Low
= OFF
INTERRUTTORE A
CHIAVE
BIANCO/
MARRONE
BIANCO/
MARRONE
VERDE
ARANCIO
NERO
NERO/BIANCO
BIANCO
Entrata 0-5V (Pin 6)
Entrata marcia avanti (Pin 12)
Entrata marcia indietro (Pin 11)
connettore
Nessun rivelatore di errori è incorporato all’ET-1XX, perciò il
controller rivelerà solo gli errori del wiper più evidenti. E’ dunque
necessario che il costruttore del veicolo fornisca un ulteriore
rivelatore di errori dell’acceleratore.
L’ET-1XX può essere integrato nella testa di comando per
garantire il controllo dell’acceleratore bidirezionale. In alternativa è
disponibile presso la Curtis un gruppo testa di comando completo,
serie CH, che permette la combinazione dell’acceleratore ET-1XX
con diverse funzioni della testa di comando standard per l’uso in
veicoli con conducente a terra o in carrelli elevatori.
Acceleratore da 0–5k Ω (“Tipo 3”)
L’acceleratore da 0-5kΩ (“Tipo 3” nel menu di programmazione) è
di tipo resistivo a due fili e funge da collegamento tra il Pot Wiper
e il Pot Low (Pin 6 e 7) come mostrato in Fig. 10. La velocità 0
corrisponde a 0Ω, misurato tra i due pin, e la massima velocità
corrisponde a 5kΩ. Questo tipo di potenziometro non è adatto per
l’uso con acceleratori di tipo bidirezionale.
Il controller fornisce una protezione contro la rottura di cavi in
quanto percepisce il flusso di corrente dall’entrata del wiper attraverso
il potenziometro e nel pin del Pot Low. Se la tensione dell’entrata
del Pot Low scende sotto 0.65 mA o il suo voltaggio risulta inferiore
Manuale
Curtis
1243 GEN 2
13
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Acceleratore
Fig. 10 Collegamenti
elettrici per
acceleratore da
0–5kΩ (“Tipo 3”).
5 — REGOLAZIONE PRESTAZIONI DEL VEICOLO
Entrata Pot Wiper (Pin 6)
FASE 2.
L’impostazione di “Restraint” standard (5 amp) dovrebbe
essere adatta per la maggior parte dei veicoli. Se il veicolo
mostra una velocità eccessiva quando scende giù per una
rampa, aumentare il valore di “Restraint”. Se il veicolo
“saltella” mentre scende giù per una rampa o frena troppo
bruscamente ad acceleratore rilasciato, diminuire il valore
di “Restraint”.
FASE 3.
Se il valore di “Restraint” è stato regolato, ricontrollare il
comportamento di frenatura quando l’acceleratore viene
ridotto per accertarsi che abbia mantenuto la sensibilità
desiderata. In caso contrario, regolare nuovamente il “Decel
Rate” come descritto nella fase 1.
VELOCITA’
SUPERIORE
Entrata Pot Low (Pin 7)
a 0.06 V, si genera un errore all’acceleratore ed il controller viene
disattivato. NOTA: Il pin di Pot Low (Pin 7) non deve essere messo
a terra (B-).
Presa di corrente da 0–5V bidirezionale ed accel. potenz. a 3 fili (“Tipo 4”)
Questi acceleratori (“Tipo 4” nel menu di programmazione) funzionano
realmente in modo bidirezionale. Non sono richiesti segnali alle entrate di
marcia in avanti e indietro del controller; l’azione è determinata dal valore di
entrata del wiper. L’interfaccia al controller per i dispositivi di Tipo 4 è simile
a quello per i dispositivi di Tipo 2. Il punto neutro sarà con il wiper a 2.5 V,
calcolato tra il Pin 6 e B-.
Il controller fornirà una velocità crescente di marcia in avanti man
mano che aumenta il suo valore di entrata wiper (Pin 6), raggiungendo una
velocità massima di marcia in avanti a 4.5 V. Il controller fornirà una velocità
di inversione di marcia crescente man mano che il valore di entrata wiper
diminuisce, raggiungendo la massima velocità di retromarcia a 0.5 V. Il
voltaggio wiper minimo e massimo non deve superare i limiti di errore di
0.5V e 4.5V.
Quando viene usato un potenz. a 3 fili ed il parametro di errore Pot Low
(vedi Sezione 3, pagina 36) è impostato su On, il controller fornisce una
protezione completa contro gli errori per acceleratori di trazione di Tipo 4.
Viene sostenuto qualunque valore del potenziometro compreso tra 1 kΩ e
10 kΩ. Quando viene usato una acceleratore di voltaggio, è responsabilità
dell’OEM di fornire un dispositivo appropriato di percezione dell’errore
acceleratore.
Nota: Se il Vostro acceleratore di Tipo 4 possiede un interruttore
interno neutro, questo dovrebbe essere cablato direttamente all’entrata
dell’interruttore di marcia in avanti (Pin 12). Il controller si comporterà come
se non fosse richiesto nessun acceleratore quando l’interruttore neutro è
alto, ed userà il valore acceleratore quando l’interruttore neutro è basso.
6
COLLEGAMENTI ELETTRICI: Uscite per segnalazione errori
Il modello 1243GEN2 dispone di due uscite per la segnalazione di errori
(Pin 2 e 3) che possono inviare informazioni diagnostiche ad un pannello
di visualizzazione. Queste uscite possono guidare i LED o altri carichi che
richiedono meno di 10 mA. Poichè queste uscite sono pensate per
guidare i LED, ognuna contiene un resistore; come risultato, queste uscite
non si abbasseranno a B-. Il collegamento elettrico viene mostrato in Fig.
11.
Le uscite di segnalazione di errori 1 e 2 possono essere
programmate per visualizzare le informazioni di errori nei due
formati: formato Codice Errore o formato Categoria Errore (vedi
Sezione 3, pagina 51).
In alternativa, il Pin 2 può essere usato per fornire un segnale di
entrata pompa (vedi parametro pump meter, Sezione 3, pagina 48); il Pin
3 può essere usato per interfacciare un circuito di abilitazione ausiliario
esterno (vedi il parametro di blocco BDI, Sezione 3, pagina 51).
14
Manuale
Curtis
1243 GEN 2
Risposta in accelerazione
Il modo in cui il veicolo reagisce in accelerazione può essere modificato
usando i parametri di “Accel Rate”, “Current Ratio”, “Quick Start”, e
“Throttle Map”. La risposta ottimale del veicolo viene ottenuta regolando
questi parametri partendo da 0 e poi posizionando l’acceleratore in
varie posizioni.
FASE 1. Impostare “Quick Start” = 0 e “Throttle Map”= 50%.
FASE 2. Guidare il veicolo e regolare “Accel Rate” per ottenere la
migliore risposta generale. Se il veicolo parte troppo
lentamente in tutte le condizioni di guida, occorre ridurre il
valore di “Accel Rate”.
FASE 3. Aumento dell’accelerazione del veicolo. Se l’accelerazione
si adatta bene a transizioni lente o moderate
dell’acceleratore, ma il veicolo inizialmente parte troppo
lentamente, impostare il parametro di “Current Ratio” a 2
o ad un valore più alto. Se il veicolo non accelera tanto
velocemente quanto desiderato quando l’acceleratore
passa velocemente da zero alla massima velocità,
aumentare il valore del parametro di “Quick Start” per
ottenere una risposta veloce dell’acceleratore .
FASE 4. Ottenere un controllo migliore a basse velocità. Se il
veicolo risponde bene a rapidi spostamenti
dell’acceleratore, ma si muove in modo troppo instabile
durante le manovre a bassa velocità, ridurre il parametro
“Throttle Map” e/o regolare il “Current Ratio” a 1. Se queste
regolazioni non sono sufficienti, diminuite il valore del
parametro di “Quick Start” per ottenere le manovre di
precisione desiderate.
7
Fluidità cambi di direzione
Si può effettuare un’ulteriore messa a punto per migliorare le transizioni
del veicolo tra la frenatura e la guida, dopo che la sintonizzazione
maggiore della prestazione e della sensibilità sono state completate —
da 1 a 6 e oltre.
FASE 1. Accertatevi che i parametri di “Braking Current Limit” e di
“Braking Rate” siano stati impostati per ottenere la reazione
desiderata (vedi Sezione 3, pagine 23 e 24).
Manuale
Curtis
1243 GEN 2
63
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Display Spyglass
5 — REGOLAZIONE PRESTAZIONI DEL VEICOLO
(ii) Impostare il parametro di “Field Map Start” leggermente
più alto rispetto al valore della corrente dell’armatura
osservato.
(iii) Caricate il veicolo e guidatelo su un terreno
pianeggiante con acceleratore massimo. Ulteriori
regolazioni della velocità del veicolo carico possono essere
fatte variando il parametro di “Field Map”. Aumentando il
valore di “Field Map” si diminuisce la velocità del veicolo
carico, e diminuendo tale valore si aumenta la stessa
velocità.
Se il parametro di “Field Map Start” è impostato
troppo alto, la zona di sicurezza del motore potrebbe essere
superata. In questo caso, riducete il parametro di “Field Map
Start” fino ad un valore di sicurezza. Quindi regolate tale parametro
fino a raggiungere la velocità massima a veicolo carico. Una
riduzione del valore della “Field Map” aiuta a portare la velocità
del veicolo carico più vicina a quella del veicolo scarico. Comunque,
bisogna ancora prestare attenzione perchè è possibile che valori
di “Field Map” troppo bassi—come valori troppo alti—oltrepassino
la zona di sicurezza del motore.
ATTENZIONE:
Collegamenti
elettrici per uscite di
segnalazione errori,
quando sono usati per
guidare i LED. In
alternativa, il Pin 2 può
essere usato per
l’entrata di un
regolatore di pompa,
ed il Pin 3 può essere
usato per interfacciare
un circuito esterno di
abilitazione.
Fig. 11
Uscita errore 1 (Pin 2)
Uscita errore 2 (Pin 3)
COLLEGAMENTI
ELETTRICI: Display
Spyglass
Lo Spyglass Curtis 840 ha come caratteristica un display a cristalli
liquidi ad 8 caratteri che mette in ordine sequenziale il contaore, il BDI %,
ed i messaggi di errore. A seconda del modello, 3 o 6 LED indicatori
sono collocati sul lato principale del calibratore. Vedi Sezione 7
(Diagnostica e Localizzazione/risoluzione problemi) per maggiori
informazioni sui display Spyglass.
Il connettore di accoppiamento ad 8 pin è il modello Molex
39-01-2085, con 39-00-0039 (18–24 AWG) pin.
MESSA A PUNTO
Si possono regolare quattro ulteriori caratteristiche di prestazione del
veicolo:
5
6
7
8
Risposta in decelerazione
Risposta in accelerazione
Fluidità cambi di direzione
Salita delle rampe.
Queste caratteristiche sono riferite alla “sensibilità” del veicolo e
saranno diverse per le varie applicazioni. Le regolazioni di
sintonizzazione vanno prese in considerazione specialmente nelle
manovre di precisione, ovvero tipicamente nel Modo 1. Una
sintonizzazione attenta dei parametri di “M1 Accel Rate”, “M1 Decel
Rate”, “M1 Restraint”, “M1 Braking Rate” e “M1 Braking Current Limit”
assicurano la risposta più confortevole possibile alle basse velocità.
5
Guida al
collegamento elettrico
e dimensioni di
montaggio per lo
spyglass Curtis
(descrizione modello a
6 LED; le dimensioni
ed il collegamento
elettrico sono identici
per il modello a 3
LED).
Fig. 12
Morsetto a “U” per
profondità del pannello
fino a 6 (0.25)
Risposta in decelerazione
Il modo in cui si comporta il veicolo quando l’acceleratore viene ridotto
o completamente rilasciato può essere regolato per adattarlo alla
Vostra applicazione, usando i parametri della Velocità di “Decel Rate”
e “Restraint”. Fare riferimento alla descrizione di questi parametri nella
Sezione 3 prima di iniziare questa procedura.
FASE 1.
62
GUIDA COLLEGAMENTO ELETTRICO
SPYGLASS
ricevere dati
Impostare il “Decel Rate” basandosi sul tempo in cui si
desidera che il veicolo si arresti al momento del rilascio
dell’acceleratore, mentresi viaggia a piena velocità e a
pieno carico. Se il veicolo frena in maniera troppo brusca
quando l’acceleratore viene rilasciato, aumentare il “Decel
Rate”.
Manuale
Curtis
1243 GEN 2
CONTROLLER 1243GEN2
FUNZIONE
terra
Dimensioni in millimetri (e pollici)
Manuale
Curtis
1243 GEN 2
15
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI: Inversione di emergenza e Driver ausiliario
5 — REGOLAZIONE PRESTAZIONI DEL VEICOLO
COLLEGAMENTI ELETTRICI: Inversione di emergenza
+
ATTENZIONE
FASE 5.
Per rendere operativa la caratteristica di inversione di emergenza, il Pin
13 (l’entrata di inversione di emergenza) deve essere collegato al
voltaggio della batteria, come viene mostrato nel diagramma standard
dello schema elettrico, in Fig. 3.
Il controller fornisce la massima torsione di frenaggio non appena
l’interuttore di inversione di emergenza viene premuto. Il veicolo verrà
quindi guidato automaticamente in direzione opposta una volta raggiunto
il limite di corrente di inversione di emergenza programmato, finchè
l’interruttore di inversione di emergenza viene rilasciato.
ATTENZIONE: Le polarità dei connettori S1 ed S2 influenza il
funzionamento dell’opzione di inversione di emergenza. Gli interruttori di
marcia avanti e indietro e le connessioni S1 ed S2 devono essere
configurate in modo tale che il veicolo si allontani dall’operatore quando
viene premuto il pulsante di inversione di emergenza.
4
Un cavo supplementare collegato direttamente all’interruttore di
inversione di emergenza garantisce l’identificazione di cavi rotti quando
quella caratteristica è programmata su On (vedi Sezione 3, pagina 43).
Il cavo dell’uscita per il controllo dell’inversione di emergenza invia
periodicamente impulsi al circuito di inversione di emergenza per
verificare la continuità del collegamento elettrico. Nel caso non ci fosse
continuità, l’uscita del controller viene inibita finchè l’errore non viene
rimediato.
Il cavo di controllo dell’inversione di emergenza è direttamente
collegato al Pin 10 come viene mostrato dalla lina punteggiata nello
schema elettrico standard, Fig. 3. Se l’opzione è selezionata ed il cavo
di controllo non è collegato, il veicolo non funziona. Se l’opzione non è
selezionata ma il cavo di controllo è collegato, non si verificano danni—
ma la continuità non potrà essere controllata.
COLLEGAMENTI ELETTRICI: Driver ausiliario
Il 1243GEN2 fornisce un driver ausiliario al Pin 8. Questo driver è
progettato per alimentare una bobina del freno elettromagnetico, come
viene mostrato nel diagramma elettrico standard (Fig. 3). L’uscita è
tarata a 2 amp. ed è protetta da sovracorrente. Un diodo di soppressione
della bobina è situato all’interno per proteggere il driver da picchi di
tensione generati quando si spegne il motore. Il collegamento elettrico
consigliato viene mostrato nel diagramma elettrico standard, in Fig. 3.
La bobina del contattore o il carico del driver non devono essere
collegati direttamente a B+, perchè ciò fa sì che il controller sia sempre
polarizzato a On attraverso il diodo di soppressione della bobina
all’entrata KSI.
Sebbene venga tipicamente usato per guidare un freno EM, il
driver ausiliario può essere usato per guidare un contattore pompa o un
servocomando sterzante idraulico in applicazioni che non richiedono un
freno EM.
Nota: Poichè il driver ausiliario viene tipicamente usato per un
freno EM, i parametri programmabili legati a questo driver vengono
descritti nel gruppo parametri freno elettromagnetico; vedi pagina 28.
Manuale
Curtis
1243 GEN 2
Equalizzazione della velocità veicolo carico/scarico
La velocità massima di un veicolo carico può essere impostata per
avvicinarsi alla velocità massima del veicolo scarico regolando i parametri
di “Field Map Start” e “Load Compensation” del controller. E’ consigliabile
rivedere la descrizione dei parametri suddetti nella Sezione 3 prima di
iniziare questa procedura.
FASE 1. La velocità massima del veicolo scarico dovrebbe già
essere stata impostata. In caso contrario, deve essere
regolata prima che venga stabilita la velocità massima del
veicolo carico.
FASE 2. Una volta che è stata impostata la velocità massima del
veicolo scarico, caricare il veicolo fino alla capacità di
carico desiderata. Lasciare i parametri di “Min Field” e
“Max Speed” alle impostazioni stabilite durante la prova a
veicolo scarico.
FASE 3A. Se lo scopo è di minimizzare la differenza tra le velocità del
veicolo carico e scarico, procedere nel modo seguente:
(i) Guidare il veicolo completamente carico su un terreno
pianeggiante con acceleratore al massimo. Quando il veicolo
raggiunge la massima velocità, osservate la corrente
dell’armatura visualizzata nel menu del monitor del
programmatore.
(ii) Impostare il parametro di “Field Map Start” leggermente
più alto rispetto al valore della corrente dell’armatura
osservato.
(iii) Verificate la variazione di velocità a veicolo carico/
scarico. Se tale variazione non è accettabile, procedere al
punto “(iv).”
(iv) Aumentare il parametro di “Load Compensation” e
ricontrollare la regolazione della velocità. Tale parametro
può essere aumentato finchè viene raggiunta la regolazione
desiderata o finchè il veicolo a bassa velocità inizia ad
oscillare (“pendolamento”). Se la variazione della velocità
a veicolo carico/scarico è accettabile ma la velocità media
non lo è, si può regolare il parametro di “Min Field”.
FASE 3B. Se si intende rendere la velocità a veicolo carico inferiore
rispetto a quella a veicolo scarico (per ragioni di sicurezza,
efficienza, o per ridurre il riscaldamento del motore),
procedere nel modo seguente:
(i) Scaricare il veicolo e guidarlo su un terreno pianeggiante
con acceleratore al massimo. Quando il veicolo raggiunge la
massima velocità, osservare la corrente dell’armatura
visualizzata nel menu del monitor.
COLLEGAMENTI ELETTRICI: Controllo invers. di emergenza
16
Per veicoli con conducente a terra/conducente a
bordo: Solitamente sono richieste velocità massime diverse per il funzionamento con conducente a terra/a bordo.
In questi casi, per regolare la velocità massima del veicolo,
occorre innanzitutto ottimizzare il funzionamento del veicolo
con conducente a bordo usando il parametro di “Min
Field”. Quindi, per impostare la velocità massima per il
funzionamento con conducente a terra, lasciare invariato il
parametro di “Min Field” e diminuire il parametro di “Max
Speed” finchè viene raggiunta la velocità desiderata del
veicolo con conducente a terra.
Manuale
Curtis
1243 GEN 2
61
5 — REGOLAZIONE PRESTAZIONI DEL VEICOLO
3
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI:
CONTATTORE, INTERRUTTORI, ed ALTRO HARDWARE
Regolazione della velocità massima del veicolo scarico
Contattore principale
Il controller ed il veicolo dovrebbero essere configurati nel modo seguente
prima di impostare la massima velocità del veicolo scarico:
• Velocità massima = 100%, tutti i modi
• “Drive Current Limit” come stabilito nella procedura di
regolazione 2
• “Field Map” = 50%
• “Field Map Start” = 50% del “drive current limit” specificato
• “Field Min” = minimo specificato dal costruttore (se
disponibile) o 3 amp.
• “Load Comp” = 0
• Il veicolo dovrebbe essere scarico
• La batteria del veicolo dovrebbe essere completamente
carica.
Durante questo procedimento il veicolo deve essere guidato su una
superficie piana in un’area sgombra. Poichè inizialmente il veicolo
potrebbe viaggiare a velocità superiori rispetto alla velocità finale
desiderata, occorre prendere precauzioni per assicurare l’incolumità
del personale addetto alla verifica e di chiunque sia presente nell’area
di prova.
FASE 1. Selezionare il Menu Programma del programmatore e
scorrere verso il basso finchè il parametro di “Field Min” si
trova nella parte alta del display.
FASE 2. Alimentare il veicolo e portare l’acceleratore al massimo.
Mentre il veicolo viene guidato in tal modo, regolare il
valore del parametro di “Fild Min” per impostare la velocità
massima desiderata. Aumentando il valore di “Field Min”
diminuisce la velocità massima del veicolo; diminuendo
tale valore la velocità massima del veicolo aumenta.
ATTENZIONE: Non diminuire il valore del parametro di “Field
Min” al di sotto del valore minimo della corrente di campo
raccomandata dal costruttore del motore, e non aumentarla
oltre 10 amp.
FASE 3. Se il valore del parametro di “Field Min” viene aumentato
a 10 amp. e la velocità massima del veicolo non è ancora
stata sufficientemente ridotta, il parametro di “Max Speed”
deve essere usato per abbassare la velocità massima del
veicolo fino al livello desiderato. Innanzitutto, diminuire il
valore del parametro di “Field Min” in modo da ottimizzare
la partenza regolare. Poi regolare il parametro di “Max
Speed” per la fase 4 in modo da abbassare la velocità
massima del veicolo fino al livello desiderato. NOTA: Se il
parametro di “Min Field” è impostato troppo alto, la coppia
iniziale creata dalla corrente di campo elevata potrebbe
causare partenze eccessivamente brusche; ecco perchè
raccomandiamo di usare il parametro di “Max Speed” in
quei casi in cui la regolazione di “Min Field” non riduce
sufficientemente la velocità massima del veicolo.
FASE 4. Scorrete verso l’alto il Menu Programma finchè il parametro
di “Max Speed” si trova nella parte alta del display. Mentre
il veicolo viene azionato con il “Field Min” impostato sul
valore selezionato nella fase 3, fate diminuire il valore del
parametro di “Max Speed” fino a raggiungere la velocità
massima del veicolo desiderata.
60
Contattore principale & Interruttori, ecc.
Manuale
Curtis
1243 GEN 2
Con ogni controller 1243GEN2 deve essere usato un contattore principale;
altrimenti i sistemi di identificazione errori non sono in grado di proteggere
completamente il controller ed il sistema di azionamento del motore dai
danni che possono insorgere in tali condizioni. Il contattore principale
permette di scollegare il controller ed il motore dalla batteria. Questa
caratteristica conferisce un significativo margine di sicurezza in quanto
l’energia della batteria può essere rimossa dal sistema di trasmissione
se l’errore al controller o al collegamento elettrico ha origine nella
potenza della batteria. Se il parametro di Contactor Diagnostics (vedi
Sezione 3, pagina 40) è su On, il controller guiderà una verifica del
contattore mancante e di un contattore cablato ogni volta che al contattore
principale viene richiesto di chiudersi e non procederà nella richiesta se
viene trovato un errore.
E’ consigliabile l’uso di un contattore principale unipolare a
monocontatto (SPST) con contatti in lega d’argento, come Albright
SW80 o SW180— disponibile presso la Curtis. Le bobine del contattore
dovrebbero venire descritte dettagliatamente con una taratura continua
alla tensione nominale del gruppo batteria.
L’uscita del driver della bobina del contattore principale (Pin 4) è
tarata a 2 amp, è protetta dalla sovracorrente, e controllata per evitare
errori nella bobina. Un diodo di soppressione incorporato nella bobina
è collegato tra l’uscita del driver della bobina del contattore principale e
l’entrata dell’interruttore a chiave. Questo protegge il driver della bobina
del contattore principale da avarie dovute ad impulsi induttivi di alta
tensione quando il contattore viene spento.
Interruttore a chiave ed interruttore Interblocco
Il veicolo deve essere provvisto di un interruttore generale on/off per
spegnere il sistema quando non viene usato. L’entrata dell’interruttore a
chiave fornisce potenza alla logica del controller.
L’interruttore interblocco—che viene tipicamente reso operativo
come interruttore posto sulla barra del timone, interruttore a pedale, o
interruttore a sedile—fornisce al sistema un interblocco di sicurezza.
L’interruttore a chiave e l’interruttore interblocco forniscono la
corrente per guidare la bobina del contattore principale e tutti gli altri
carichi del driver uscite così come il circuito logico interno del controller;
quindi devono essere in grado di sopportare tali flussi di corrente.
Interruttori di marcia avanti, marcia indietro, di selezione modi, e di
inversione di emergenza
Questi interruttori di entrata possono essere di tipo unipolare e a
monocontatto (SPST), in grado di commutare il voltaggio della batteria
a 10 mA. L’interruttore di inversione di emergenza consiste tipicamente
in un interruttore momentaneo, attivo solo mentre è premuto.
Diodo di protezione di inversione polarità
Per proteggere l’inversione polarità deve essere aggiunto in serie un
diodo tra la batteria ed il KSI. Questo diodo inibisce il funzionamento del
contattore principale ed il flusso di corrente se il gruppo batteria viene
cablato accidentalmente con i terminali B+ e B- invertiti. Deve essere
sufficientemente ridimensionato per le massime correnti della bobina
del contattore e del diodo di segnalazione errori richieste dal circuito di
controllo. Il diodo di protezione dell’inversione di polarità deve essere
cablato come viene mostrato nello schema elettrico standard, Fig. 3
(pagina 7).
Manuale
Curtis
1243 GEN 2
17
2 — INSTALLAZIONE & COLLEGAMENTI ELETTRICI:
5 — REGOLAZIONE PRESTAZIONI DEL VEICOLO
Interruttori, ecc.
Dispositivi di protezione del circuito
Per proteggere i circuiti elettrici di comando da accidentali cortocircuiti,
è necessario collegare in serie un fusibile di bassa potenza (adatto per
il flusso massimo di corrente) tra la batteria ed il KSI. In aggiunta, un
fusibile di potenza deve essere cablato in serie con il contattore principale
per proteggere il motore, il controller, e le batterie da cortocircuiti
accidentali nel sistema elettrico. Il fusibile adatto per ogni applicazione
deve essere selezionato con l’aiuto di un costruttore o di un distributore
di fusibili. Lo schema elettrico standard, Fig. 3, mostra la posizione
consigliata per ogni fusibile.
Per determinare questo valore, dividere questo valore
(tipicamente il 70% del nominale) per la resistenza di
avvolgimento di campo ad alta temperatura fornita dal
costruttore. Impostate il parametro di “Field Max” su questo
valore. Ciò garantisce una buona costanza tra la
prestazione del veicolo a caldo e a freddo.
STEP 5.
Funzionamento dell’interruttore di selezione modi
I due interruttori di selezione modi (Selezione Modo 1 e Selezione Modo 2)
insieme definiscono le quattro modalità di funzionamento. Le combinazioni
degli interruttori sono mostrate nella Tabella 2.
Tabella
2
SELEZIONE
MODO
INTERRUTTORE
MODALITA’
OPERATIVA
MODO
INTERRUTTORE
MultiMode™
1
APERTO
APERTO
MultiMode™
2
CHIUSO
APERTO
MultiMode™
3
APERTO
CHIUSO
MultiMode™
4
CHIUSO
CHIUSO
Sensore di carico
A questo punto il parametro di “Max Field” è stato fissato. La fase
successiva è di impostare il parametro di “Min Field”. NOTA: Il parametro
di “Min Field” non dovrebbe mai essere fissato al di sotto del valore
nominale specificato dal costruttore. Far funzionare il motore a correnti
di campo inferiori a quella specificata comporta il funzionamento
all’esterno della zona di sicurezza del motore e causa la formazione di
archi tra le spazzole ed il commutatore, riducendo in modo significativo
la durata del motore e della spazzola. Il valore del parametro di “Min
Field” può essere aumentato rispetto al valore specificato dal costruttore
per limitare la velocità massima del veicolo. (La regolazione della
velocità massima del veicolo verrà descritta nella procedura di regolazione
3).
Se il controller viene ottimizzato in modo tale che il sistema funzioni
all’esterno della zona di sicurezza di funzionamento del motore, vengono
emessi segnali sonori e visivi. In condizioni di funzionamento normale,
il motore emette un fruscio con un suono che aumenta all’aumentare
della velocità di rotazione. Se si sente anche un eventuale suono
“stridente”, ciò solitamente indica che nel motore si stanno formando
archi e che sta funzionando al di fuori della sua zona di sicurezza. Questo
funzionamento è accompagnato normalmente da un forte odore
proveniente dal motore. Se le spazzole e le lamelle del collettore sono
visibili, la formazione di archi è percettibile. Più il motore sta funzionando
all’esterno della zona di sicurezza, maggiore sarà la formazione di archi.
Il funzionamento all’esterno della zona di sicurezza è molto dannoso per
il motore. Il parametro di “Field Min” e possibilmente anche quello di
“Field Map” dovrebbero essere aumentati fino alle indicazioni di arresto
di formazione archi. Una diminuzione del parametro di “Field Map Start”
permette anche di riportare il funzionamento nella zona di sicurezza del
motore.
MODI
1
2
[optional]
Il 1243GEN2 fornisce un’entrata del sensore di carico al Pin 1. Il controller
può essere programmato per variare la forza di frenatura a recupero a
seconda dell’entrata del sensore di carico. Il sensore di carico, se ne
viene usato uno, dovrebbe essere ridimensiato in modo da poter
maneggiare il massimo carico dell’applicazione previsto senza superare
i 5 V.
18
Manuale
Curtis
1243 GEN 2
Per la coppia massima indipendentemente dalla
temperatura, impostare il parametro di “Field Max” sulla
corrente di campo massima assoluta del motore. Per
stabilire tale corrente, dividere il voltaggio nominale della
batteria per la resistenza dell’avvolgimento di campo a
bassa temperatura fornita dal costruttore. Impostare il
parametro di “Field Max” su questo valore. Ciò garantisce
la massima coppia possibile in tutte le condizioni.
Manuale
Curtis
1243 GEN 2
59
5 — REGOLAZIONE PRESTAZIONI DEL VEICOLO
2
3 — PARAMETRI PROGRAMMABILI
Adattamento del controller al motore
Il controller 1243GEN2 è così flessibile da poter essere ottimizzato dal
costruttore per qualsiasi motore ad eccitazione separata. I parametri
programmabili permettono un pieno controllo della massima corrente
dell’armatura del motore durante la guida e la frenatura, e della corrente
di campo massima e minima del motore, così come il rapporto tra la
corrente di campo e la corrente dell’armatura. Questa flessibilità permette
di massimizzare la prestazione del motore e allo stesso tempo di
proteggerlo dal funzionamento all’esterno della sua zona di sicurezza.
Al fine di regolare il controller in maniera appropriata, bisognerebbe
ottenere le seguenti informazioni dal costruttore del motore:
• VALORE MASSIMO DELLA CORRENTE DELL’ ARMATURA
• VALORE MASSIMO DELLA CORRENTE DI CAMPO
• VALORE MINIMO DELLA CORRENTE DI CAMPO
• RESISTENZA DI CAMPO, A CALDO E A FREDDO
La prestazione di un motore ad eccitazione separata varia a seconda
della temperatura. Ciò è dovuto alla variazione della resistenza
dell’avvolgimento di campo man mano che il motore si riscalda durante
l’uso. Quando la temperatura di avvolgimento di campo aumenta,
aumenta anche la sua resistenza; quindi, viene ridotta la corrente
massima che può attraversare l’avvolgimento. Le riduzioni della corrente
di campo sulla gamma di temperature operative del motore possono
essere comprese tra 10% e 50%. Poichè la massima corrente di campo
disponibile determina la coppia massima che può essere prodotta dal
motore, la prestazione del veicolo sotto carico e su pendenze varia
quando il motore si scalda. Il cambio di prestazione può essere limitato
regolando il motore quando è caldo piuttosto che freddo. Quindi, si
raccomanda di seguire la seguente procedura a motore caldo.
FASE 1. Usando il Menu Programma del programmatore, regolate
il valore del parametro del “Drive Current Limit” in ogni
modo al valore più basso di: (a) il valore più alto della
corrente dell’armatura del motore, o (b) la massima corrente
limite di azionamento del controller. Questo valore può
essere regolato ulteriormente per stabilire la sensibilità di
guida del veicolo desiderata in ogni modo.
FASE 2. Impostate il valore del parametro di “Braking Current Limit”
in ogni modo al valore più basso di: (a) il valore massimo
di corrente dell’armatura del motore, o (b) la massima
corrente limite di frenatura del controller. Questo valore può
essere regolato in seguito per stabilire la sensibilità di
frenatura del veicolo desiderata in ogni modo.
FASE 3. Per stabilire il valore del parametro di “Field Max”, occorre
innanzitutto
decidere
se
si
vuole
mantenere un funzionamento del veicolo costante attraverso
tutta la gamma di temperature del motore. Se è così,
procedere alla fase 4. Comunque, se non interessa
mantenere un funzionamento costante attraverso le varie
temperature del motore, bensì raggiungere la massima
coppia, procedere alla fase 5.
FASE 4. Per un funzionamento più costante attraverso le varie
temperature, impostare il parametro di “Field Max” alla
massima corrente di campo disponibile per il voltaggio
più basso della batteria e con motore caldo.
58
Manuale
Curtis
1243 GEN 2
PARAMETRI
3
PROGRAMMABILI
Il controller 1243GEN2 possiede una serie di parametri che possono
essere programmati usando un programmatore portatile Curtis. Questi
parametri programmabili permettono di adattare le caratteristiche di
prestazione del veicolo alle necessità del cliente per soddisfare esigenze
di singoli veicoli o di applicazioni di veicoli.
Ogni parametro viene fornito con tarature di parametri specificate
dal costruttore e per ogni parametro programmabile viene anche
specificato se l’utente o solamente il costruttore può accedere ad esso.
Pertanto i programmatori sono disponibili nelle versioni “Utente” e
“OEM” (costruttore). Il programmatore “Utente” può regolare solo quei
parametri con diritti di accesso all’utente, mentre il programmatore
“OEM” può regolare tutti i parametri. Per informazioni riguardanti il
funzionamento del programmatore 1311 vedi l’Appendice B.
L’opzione MultiMode™ del controller 1243GEN 2 permette il
funzionamento in quattro modalità distinte. Queste possono essere
programmate per fornire quattro diversi gruppi di caratteristiche operative, che possono essere utili per il funzionamento in condizioni diverse,
come ad esempio le manovre interne lente di precisione in Modo 1; il
movimento esterno a velocità maggiore per lunghe distanze in Modo 4;
e le condizioni particolari per applicazioni specifiche nei Modi 2 e 3. In
ognuno dei quattro modi possono essere configurati in maniera
indipendente otto parametri:
— valore di accelerazione (M1–M4)
— corrente limite di frenatura (M1–M4)
— valore di frenatura (M1–M4)
— valore di decelerazione (M1–M4)
— corrente limite di azionamento (M1–M4)
— velocità massima di marcia in avanti (M1–M4)
— velocità massima di retromarcia (M1–M4)
— freno (M1–M4).
Per descrivere meglio le loro relazioni reciproche, i singoli parametri
vengono raggruppati nelle seguenti categorie:
Parametri della batteria
Parametri di accelerazione
Parametri di frenatura
Parametri di frenatura interblocco
Parametri del freno elettromagnetico
Parametri di velocità
Parametri dell’acceleratore
Parametri di campo
Parametri del contattore
Parametri di errore sequenziale
Parametri di inversione di emergenza
Parametri di protezione motore
Parametri del contaore
Parametri BDI
Parametri di codice errore
Manuale
Curtis
1243 GEN 2
19
5 — REGOLAZIONE PRESTAZIONI DEL VEICOLO
3 — PARAMETRI PROGRAMMABILI
Parametro della batteria ......... p.21
Battery Voltage
Parametri di accelerazione ... p.21
Drive Current Limit, M1–M4
Acceleration Rate, M1–M4
Quick Start
Current Ratio
Parametri di frenatura .............. p.23
Braking Current Limit, M1–M4
Deceleration Rate, M1–M4
Throttle Deceleration Rate
Restraint, M1–M4
Braking Rate, M1–M4
Taper Rate
Variable Braking
Parametri di frenatura
interblocco................................p.26
Interlock Braking Rate
Max. Forward Regen
Max. Reverse Regen
Min. Forward Regen
Min. Reverse Regen
Max. Load Volts
Min. Load Volts
Parametri di campo ................... p.38
Min. Field Current Limit
Max. Field Current Limit
Field Map Start
Field Map
Field Check
Parametri del contattore
principale ...............................p. 40
Main Contactor Interlock
Main Contactor Open Delay
Main Contactor Diagnostics
Parametri di errore
sequenziale ...........................p. 41
Anti-Tiedown
High Pedal Disable (HPD)
Static Return to Off (SRO)
Sequencing Delay
Parametri di inversione di
emergenza ...................................... p.43
Emerg. Reverse Current Limit
Emerg. Reverse Check
Emerg. Reverse Direction Interlock
Parametri di protezione
motore .................................. ..........p.44
Warm
Motor
Motor
Motor
Speed
Warm Resistance
Hot Resistance
Resistance Compensation
1-B
Parametri del
contaore ...................... ...p.45
Adjust Hours High
Adjust Hours Middle
Adjust Hours Low
Set Total Hours
FASE 1.
Sollevare da terra con un cric le ruote del veicolo in modo che
possano girare liberamente.
FASE 2.
Inserire il programmatore nel controller ed accendere
l’interruttore a chiave e quello interblocco (se viene usato).
FASE 3.
Selezionare il menu del monitor. Il campo della percentuale
acceleratore dovrebbe essere visibile nella parte alta del
display e occorre far riferimento a questo valore. Per
comodità, mettete un “segnalibro” qui così potrete tornare
facilmente a leggere il valore di percentuale acceleratore.
FASE 4.
Ruotare l’acceleratore in avanti fino alla posizione di
massima velocità e osservare il valore in percentuale
dell’acceleratore. Questo valore dovrebbe essere del
100%. Se è inferiore, il parametro di “Throttle Max” deve
essere diminuito per ottenere l’uscita completa del controller nella massima posizione acceleratore. Usate il
programmatore per diminuire il valore del parametro di
“Throttle Max”, e ripetete questa fase finchè il valore è del
100%. Se mettete un secondo “segnalibro” al parametro di
“Throttle Max” potrete facilmente saltare avanti e indietro
tra il parametro ed il campo di percentuale acceleratore.
FASE 5.
Ora che la posizione dell’acceleratore risulta al 100%,
ridurre lentamente l’acceleratore finchè il valore in
percentuale scende al di sotto del 100% e fare attenzione
alla posizione dell’acceleratore. Questa rappresenta la
corsa extra di movimento consentita dal meccanismo
dell’acceleratore. Se questa corsa è ampia, è possibile
diminuirla aumentando il valore del parametro di “Throttle
Max”. Ciò fornirà una maggiore corsa utile dell’acceleratore
ed un migliore controllo del veicolo. Usando il
programmatore, aumentare il valore del parametro di
“Throttle Max” e ripetere la verifica finchè viene raggiunta
una corsa extra adeguata.
FASE 6.
Se viene usato un’acceleratore bidirezionale, ripetere il
procedimento per la direzione opposta. Il valore di “Throttle
Max” deve essere selezionato in modo tale che
l’acceleratore funzioni correttamente sia in avanti che
indietro.
Set Traction Hours
Total Service Hours
Traction Service Hours
Total Disable Hours
Traction Disable Hours
Traction Fault Speed
Service Total
Service Traction
Hourmeter Type
Pump Meter
Parametri BDI .............. p.49
Full Voltage
Empty Voltage
Reset Voltage
Battery Adjust
BDI Disable
BDI Limit Speed
Parametri di codice
errore..........................p.51
Fault Code
Parametri del freno
elettromagnetico .......................... p.28
Regolazione di “Throttle Max”
BDI Lockout
Auxiliary Driver Type
Electromagnetic Brake PWM
Auxiliary Driver Delay
Interlock Brake Delay
Parametri di velocità ................. p.31
Max. Forward Speed, M1–M4
Max. Reverse Speed, M1–M4
Creep Speed
Load
Compensation
Parametri dell’acceleratore ... p.32
Throttle Type
Throttle Deadband
Throttle Max
Throttle Map
+
I singoli parametri vengono descritti nel testo
seguente secondo l’ordine con cui sono elencati in
questa pagina, cioè con i nomi abbreviati visualizzati
nel Menu Programma del programmatore. Non tutti
questi parametri vengono visualizzati su tutti i controller; la lista di ogni controller dipende dalle sue
caratteristiche.
Pot Low Fault
Il programmatore visualizza i parametri secondo un
ordine diverso. Per un elenco dei singoli parametri
nell’ordine con cui appaiono nel Menu Programma,
vedi la Sezione 6: Menu Programmatore.
20
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
57
5 — REGOLAZIONE PRESTAZIONI DEL VEICOLO
1-A
Parametro batteria
Regolazione di “Throttle Deadband”
FASE 1.
Sollevare da terra con un cric le ruote del veicolo in modo che
possano girare liberamente.
FASE 2.
Inserire il programmatore nel controller ed accendere
l’interruttore a chiave e quello interblocco (se in uso).
FASE 3.
Selezionare il menu del monitor. La percentuale del campo
acceleratore dovrebbe essere visibile nella parte alta del
display e occorre far riferimento a tale valore. Per comodità,
mettete un “segnalibro” qui, così potrete tornare facilmente
a leggere il valore di percentuale dell’acceleratore.
FASE 4.
Scorrere verso il basso finchè è visibile il campo di “Forward Input”. Il display dovrebbe indicare che l’interruttore di
marcia in avanti è su “Off”.
FASE 5.
Ruotare lentamente in avanti l’acceleratore finchè il display
indica che l’interruttore di marcia in avanti è su “On”. Fate
attenzione durante questa fase perchè è importante
identificare la posizione di soglia dell’acceleratore alla
quale l’interruttore di marcia in avanti viene abilitato ed il
controller riconosce il comando di marcia in avanti.
FASE 6.
FASE 7.
FASE 8.
56
3 — PARAMETRI PROGRAMMABILI: Batteria & Parametri accelerazione
V O LTA G E
Il parametro di voltaggio della batteria fissa le soglie di protezione da
sovratensione e sottotensione per il controller e la batteria. La protezione
da sovratensione riduce la frenatura a recupero per evitare possibili
danni alla batteria e ad altre componenti del sistema elettrico dovuti alla
sovratensione; la protezione da sottotensione evita che i sistemi
funzionino a voltaggi inferiori rispetto alle loro soglie programmate. Il
parametro del voltaggio batteria può essere regolato su 2 o 3, e
dovrebbe sempre essere fissato sulla base del voltaggio nominale del
gruppo batteria del sistema:
REGOLAZIONE
2
3
M1–M4, DRIVE C/L
Il parametro “drive current limit” permette di regolare la corrente massima
che il controller fornisce al motore durante l’operazione di azionamento.
Questo parametro può essere ridotto per diminuire la torsione massima
applicata dal motore al sistema di guida in qualunque modalità di
prestazione ridotta. Questa corrente limite di guida può essere regolata
da 50 amp. fino al livello di corrente massima dell’armatura del controller.
(La corrente massima dipende dal modello del controller; vedi
caratteristiche nella Tabella D-1.)
La corrente limite di guida viene regolata come parte del processo
di regolazione della prestazione del veicolo (Sezione 5).
M1–M4, ACCEL RATE
L’”acceleration rate” definisce il tempo necessario al controller per
accelerare da un’uscita dello 0% ad una del 100%. Un valore maggiore
rappresenta un tempo di accelerazione più lungo ed un avvio più
graduale. Si possono ottenere partenze più veloci riducendo il tempo di
accelerazione, cioè regolando la velocità di accelerazione ad un valore
inferiore. Il valore di accelerazione è regolabile da 0.1 a 3.0 secondi.
La velocità di accelerazione viene regolata come parte del processo
di regolazione della prestazione del veicolo (Sezione 5).
Osservando il valore in percentuale dell’acceleratore nel
menu di verifica del programmatore, continuare a ruotare
l’acceleratore oltre il punto di innesto dell’interruttore di
marcia in avanti. Fare attenzione a dove il valore della
percentuale acceleratore inizia ad aumentare, indicando
che il controller ha iniziato ad alimentare il motore. Se
l’acceleratore deve essere ruotato più di quanto desiderato
prima che il valore inizi ad aumentare, il parametro di
“Throttle Deadband” deve essere diminuito e la procedura
va ripetuta dalla fase 5. Se la rotazione tra il punto in cui
l’interruttore di marcia in avanti viene attivato ed il valore in
percentuale dell’acceleratore inizia ad aumentare è
accettabile, il “Throttle Deadband” è regolato correttamente.
QUICK
1243 GEN 2
START
Non appena si riceve un’improvvisa richiesta di accelerazione dalla
posizione neutra, la funzione di “quick start” porta il controller ad aumentare
momentaneamente la sua velocità di accelerazione normale, per
superare l’inerzia del veicolo. L’algoritmo della partenza veloce viene
applicato ogni volta che l’acceleratore passa attraverso la posizione
neutra ed il controller non è in modo di frenatura.
Se si sta usando un gruppo acceleratore bidirezionale, la
procedura dovrebbe essere ripetuta per la direzione inversa.
Il valore di “Throttle Deadband” deve essere selezionato in
modo tale che l’acceleratore funzioni correttamente sia in
avanti che indietro.
Curtis
24V
36V
Parametri accelerazione
Senza muovere l’acceleratore, tornate alla visualizzazione
della percentuale del campo acceleratore e leggete il
valore mostrato, che dovrebbe essere zero. Se è così,
procedere alla fase 7. In caso il valore fosse superiore a
zero, il parametro di “Throttle Deadband” deve essere
aumentato (vai al menu programma) e la procedura ripetuta
dalla fase 5 finchè la percentuale dell’acceleratore non
raggiunge lo zero nel punto di innesto della direzione in
avanti. Se mettete un secondo “segnalibro” dove c’è il
parametro di “Throttle Deadband”, ciò vi permetterà di
saltare facilmente avanti e indietro tra il parametro ed il
campo della percentuale acceleratore.
Manuale
VOLTAGGIO NOMINALE
GRUPPO BATTERIA
Manuale
Curtis
1243 GEN 2
21
5 — REGOLAZIONE PRESTAZIONI DEL VEICOLO
3 — PARAMETRI PROGRAMMABILI: Parametri frenatura
Se il controller è in modo di frenatura, la funzione di “quick start” viene
disabilitata, permettendo alla frenatura normale di avere luogo. La
“quick start” può essere regolata nei valori tra 0 e 10. Un aumento del
valore velocizza la risposta di accelerazione del veicolo ai movimenti
rapidi dell’acceleratore.
Il parametro di “quick start” viene regolato come parte del processo
di regolazione della prestazione del veicolo (Sezione 5).
NOTA: La “quick start” non è un parametro MultiMode™, e perciò il
suo valore influenza le quattro modalità operative.
CURRENT
5
REGOLAZIONE PRESTAZIONI DELVEICOLO
Il controller 1243GEN2 è un sistema di controllo del veicolo molto efficiente.
La sua grande varietà di parametri regolabili consente di ottimizzare
molti aspetti di prestazione del veicolo. Questa sezione fornisce
spiegazioni su ciò che fanno i principali parametri di regolazione e dà
istruzioni su come usare questi parametri per ottimizzare la prestazione
del Vostro veicolo. Una volta che la regolazione di una combinazione
veicolo/motore/controller è stata ottimizzata, i valori del parametro
possono essere standardizzati per quel sistema o modello di veicolo.
Qualunque cambiamento nel motore, nel sistema di comando del
veicolo, o nel controller richiedono che il sistema venga nuovamente
messo a punto per ottenere una prestazione ottimale.
Le procedure di ottimizzazione dovrebbero essere eseguite
secondo la sequenza data, poichè le fasi successive si basano su quelle
precedenti. Le procedure di regolazione guidano il personale su come
regolare vari parametri programmabili per raggiungere determinati
obiettivi di prestazione. E’ importante che venga compreso l’effetto di
questi parametri programmabili, al fine di valorizzare al meglio le
caratteristiche del controller. Per qualsiasi dubbio riguardo alla funzione
di questi parametri, far riferimento alle descrizioni degli stessi nella
Sezione 3.
La caratteristica del 1243GEN2 MultiMode™ permette al veicolo di
essere configurato per fornire quattro diverse modalità operative. La
modalità 1 è pensata per manovre interne lente di precisione, la modalità
4 per spostamenti esterni più rapidi e su lunghe distanze, e le modalità
2 e 3 per applicazioni specifiche in condizioni speciali. Può essere
necessario dover ripetere acune delle procedure di regolazione quattro
volte, una per ogni modalità.
RATIO
Il parametro di “current ratio” determina la quantità di corrente programmata disponibile al motore ad acceleratore ridotto. Questo parametro
può essere fissato a 1, 2, 3, o 4, in corrispondenza ai seguenti rapporti:
REGOLAZIONE
RAPPORTO
1
2
3
4
1:1
2:1
4:1
8:1
Per esempio, con il rapporto di corrente fissato a 1 con richiesta
dell’acceleratore al 20%, verrà inviato al motore il 20% della tensione
batteria ed il 20% della corrente di azionamento (supponendo una
regolazione della mappatura dell’acceleratore al 50%). Se alle stesse
condizioni il rapporto corrente è fissato a 2 , sarà disponibile il 40% della
corrente; se è fissato a 3 l’80%. Il controller non lascerà passare al
motore più della corrente massima programmata. Se il rapporto di
corrente è fissato a 4 con richiesta dell’acceleratore al 20%, il controller
permette solo il 100% della corrente di azionamento e non il 160%.
Valori alti di “current ratio” permettono un avvio più rapido ed una
migliore salita delle rampe con acceleratore parziale, ma possono
causare un’eccessiva irregolarità di movimento.
Il parametro di “current ratio” viene regolato come parte del processo
di regolazione della prestazione del veicolo (Sezione 5).
Nota: Il “current ratio” è efficace solo durante la marcia; non
influenza la frenatura a recupero.
22
Manuale
Curtis
1243 GEN 2
REGOLAZIONE
PRINCIPALE
Solitamente su un veicolo nuovo sono quattro le principali caratteristiche
di prestazione che vengono ottimizzate:
1
2
3
4
Regolazione della corsa utile dell’acceleratore
Adattamento del controller rispetto al motore
Regolazione della velocità massima del veicolo scarico
Equalizzazione della velocità del veicolo carico/scarico.
Queste quattro caratteristiche dovrebbero essere regolate secondo
l’ordine in cui sono elencate.
1
Regolazione della corsa utile acceleratore
Prima di tentare di ottimizzare qualunque specifica caratteristica di
prestazione del veicolo, è importante accertarsi del fatto che l’uscita del
controller sia completamente funzionante. Le seguenti procedure
stabiliranno i valori dei parametri di “Throttle Deadband” e “Throttle
Max”, che corrispondono alla corsa utile completa del meccanismo
particolare del Vostro acceleratore. E’ consigliabile avere una tolleranza
attorno alla corsa utile completa del meccanismo acceleratore per
permettere variazioni di resistenza dell’acceleratore nel tempo e a
diverse temperature, così come variazioni nella tolleranza dei valori del
potenziometro tra i singoli meccanismi acceleratore.
Manuale
Curtis
1243 GEN 2
55
4 — VERIFICA DELL’INSTALLAZIONE
+
ATTENZIONE
3 — PARAMETRI PROGRAMMABILI: Parametri frenatura
Parametri frenatura
Se il collegamento elettrico dell’interruttore è corretto, spegnere
il controller, scollegare la batteria, e scambiare le connessioni
elettriche di campo del motore (S1 e S2) sul controller. Ora il
motore dovrebbe girare nella direzione corretta.
Il motore dovrebbe girare più rapidamente in proporzione
all’aumento della acceleratore. In caso contrario, fare riferimento
alla Sezione 7. ATTENZIONE: La polarità delle connessioni S1 e
S2 influenzano il funzionamento dell’inversione di emergenza. Gli
interruttori di marcia avanti e indietro e le connessioni S1 e S2
devono essere configurati in maniera tale che il veicolo si allontani
dall’operatore quando viene premuto il pulsante di inversione di
emergenza.
I sette parametri di frenatura influenzano la frenatura a recupero che
viene innescata quando l’acceleratore viene rilasciato o quando viene
invertita la direzione di marcia mentre il veicolo viene guidato. Durante
la frenatura a recupero, la corrente dell’armatura fluisce verso la
batteria.
M1–M4, BRAKE C/L
Il parametro “brake current limit” regola la corrente massima che il
controller fornisce al motore durante la frenatura a recupero. Il “brake
current limit” è regolabile da 50 amp. fino alla massima corrente di
frenatura del controller. (La corrente massima dipende dal modello di
controller; vedi caratteristiche nella Tabella D-1). Il “brake current limit”
viene regolato come parte del processo di regolazione della prestazione
del veicolo (Sezione 5).
5. Selezionare il menu del monitor, e scorrere verso il basso per
osservare lo stato degli interruttori di marcia avanti, indietro,
interblocco, di inversione di emergenza, e di modo. Girare un
interruttore alla volta, ed osservate il programmatore, che
dovrebbe visualizzare lo stato corretto per ogni interruttore.
M1–M4, DECEL RATE
Il “decel rate” determina il tempo necessario al controller per ridurre la
sua uscita quando l’acceleratore viene rilasciato. Un valore inferiore
rappresenta una decelerazione più rapida e quindi una più breve
distanza d’arresto. Il “decel rate” determina la caratteristica di frenatura
del veicolo per qualunque riduzione dell’acceleratore, compresa la
posizione neutra, che non includa la richiesta di direzione opposta. Il
“decel rate” è regolabile da 0.1 a 10.0 secondi. Il “decel rate” viene
regolato come parte del processo di regolazione della prestazione del
veicolo (Sezione 5).
6. Verificate che tutte le opzioni, come l’”high pedal disable” (HPD),
lo “static return to off” (SRO), e l’”anti-tiedown” siano come
desiderate.
7. Sui veicoli con conducente a terra, verificare che la caratteristica
di inversione di emergenza stia funzionando correttamente (cioè,
premere il pulsante di inversione di emergenza, ed accertarsi che
le ruote girino nella direzione corretta per far allontanare il veicolo
dall’operatore).
Se il collegamento elettrico di controllo dell’inversione di
emergenza è facoltativo, verificate il circuito di controllo. Applicate
l’acceleratore in modo tale che la ruota di trazione giri. Mentre
continuate ad applicare l’acceleratore, scollegare
momentaneamente uno dei fili di inversione di emergenza. La
ruota motrice dovrebbe arrivare a fermarsi e dovrebbe essere
indicato un errore. Accertarsi di ricollegare il filo di inversione di
emergenza dopo aver completato questa verifica del circuito di
controllo.
THROTTLE
DECEL
Il parametro “throttle decel” regola la velocità a cui il veicolo passa alla
frenatura quando l’acceleratore viene rilasciato per la prima volta. Se il
“throttle decel” è regolato su un valore basso, la decelerazione inizia in
modo brusco. La transizione è più graduale se il “throttle decel” è più alto,
ma impostare un parametro di “throttle decel” troppo alto può far perdere
il controllo del veicolo quando l’acceleratore viene rilasciato, in quanto
esso continua ad avanzare per un breve periodo. Il “throttle decel” è
regolabile da 0.1 a 1.0 secondi, con un valore di 0.3 o 0.4 che bene si
adatta alla maggior parte dei veicoli.
Quando la corrente dell’armatura diventa negativa (cioè, nel
momento in cui si passa da una torsione positiva ad una negativa), entra
in effetto la velocità di decelerazione normale.
M1–M4,
RESTRAINT
Poichè il controller 1243GEN2 è configurato per garantire una frenatura a
recupero, una velocità eccessiva porta a creare una corrente di frenatura,
che limita o “arresta” la condizione di sovravelocità. Il parametro di
“restraint” determina con quanta intensità il controller limita la velocità del
veicolo fino alla taratura esistente dell’acceleratore. Essa può essere
applicata quando si rilascia l’acceleratore o quando il veicolo inizia a
viaggiare in discesa.
54
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
23
4 — VERIFICA DELL’INSTALLAZIONE
3 — PARAMETRI PROGRAMMABILI: Parametri frenatura
Con l’acceleratore in posizione zero, la funzione di “restraint” cerca
di mantenere il motore a velocità zero, trattenendo il veicolo ed evitando
che scenda giù dalle rampe. Più è alto il valore del parametro di
“restraint”, più forte è la forza di frenatura applicata al motore, quindi il
veicolo scenderà più lentamente dalle rampe. Questa velocità
micrometrica dipende dalla taratura di “restraint”, dalla pendenza delle
rampe e dal peso del carico del veicolo. L’opzione di “restraint” non può
mai mantenere il veicolo perfettamente fermo sulla rampa e non è
pensato per rimpiazzare un freno meccanico o elettromagnetico.
Il parametro di “restraint” stabilisce una mappatura lineare della
corrente di campo in funzione della corrente di frenatura, ed è regolabile
da un campo minimo programmato (Field Min) fino alla massima
corrente di campo del controller. Come viene mostrato nella Fig. 13, è
limitato da un campo massimo programmato (Field Max). Fissare il
parametro di “restraint” ad un valore alto provoca una frenatura brusca,
nello sforzo di portare la velocità del veicolo ad un valore richiesto. Valori
estremamente alti possono far oscillare la velocità del veicolo
(“pendolamento”) mentre si trova in questa situazione.
Il parametro di “restraint” viene regolato come parte del processo
di regolazione della prestazione del veicolo (Sezione 5).
4
+
ATTENZIONE
Prima di iniziare questi controlli, posizionare il veicolo
su blocchi in modo che le ruote di trazione siano
sollevate da terra.
Non rimanere, e non permettere a nessun altro di
sostare, direttamente di fronte o dietro al veicolo
durante la verifica.
Verificare che l’interruttore a chiave sia spento, che
l’acceleratore sia in posizione neutra, e che gli
interruttori di marcia avanti e indietro siano aperti.
Indossare occhiali di protezione ed usare attrezzi
ben isolati.
Campo Max.
= 18 A
1. Nel caso fosse disponibile un programmatore, collegarlo al connettore
del programmatore.
2. Accendere l’interruttore a chiave. Il programmatore dovrebbe
azionarsi mostrando una visualizzazione iniziale, ed il LED di stato
del controller dovrebbe iniziare ad emettere in maniera costante un
flash singolo. Se non accade nulla di tutto ciò, controllate la continuità
nel circuito dell’interruttore a chiave e la massa del controller.
Campo Min.
=3 A
CORRENTE DI FRENATURA (ampère)
3. Selezionate il menu degli errori del sistema. Lo schermo dovrebbe
indicare “Assenza errori.” Chiudere l’interruttore dell’interblocco.
Per eseguire questa operazione su un veicolo con conducente a
terra, tirare la barra del timone verso il basso fino alla posizione
operativa. Il LED di stato dovrebbe continuare ad emettere un flash
singolo ed il programmatore dovrebbe continuare ad indicare che
non ci sono errori.
Nel caso ci sia qualche problema, il LED emette un codice
diagnostico ed il programmatore visualizza un messaggio
diagnostico. Se la verifica viene effettuata senza un programmatore,
cercare il codice diagnostico del LED nella Sezione 7: Diagnostica
e localizzazione-risoluzione errori.
Quando il problema è stato risolto, potrebbe essere necessario
riciclare l’interruttore a chiave per resettare l’errore.
Corrente limite di
frenatura = 300 A
M1–M4, BRAKE RATE
Il “brake rate” definisce il tempo necessario al controller per portare il
valore di frenatura da 0% a 100% (come viene definito dal corrispondente
limite di corrente di frenatura specifico del modo) quando viene
selezionata una nuova direzione. Un valore più alto rappresenta un
tempo più lungo e di conseguenza una frenatura più dolce. Una frenatura
più rapida viene raggiunta regolando la velocità di frenatura su un valore
inferiore. Il “brake rate” è regolabile da 0.1 a 3.0 secondi.
Nota: Il parametro di “brake rate” deve essere programmato su
“Off” per il parametro di velocità di frenatura da applicare; se la frenatura
variabile è su “On”, la velocità di frenatura sarà determinata dalla
posizione dell’acceleratore piuttosto che dalla velocità di frenatura
programmata.
24
DELL’INSTALLAZIONE
Prima di azionare il veicolo, occorre completare attentamente la seguente
procedura di verifica. Nel caso emergessero problemi durante questa
fase, si faccia riferimento alla sezione di diagnostica e localizzazionerisoluzione di errori (Sezione 7) per ulteriori informazioni.
Il controllo dell’impianto può essere eseguito con o senza un
programmatore. La procedura di controllo risulta più semplice con un
programmatore. Altrimenti, osservare il LED di stato (collocato nella
zona dell’etichetta del controller) per i codici diagnostici, che vengono
elencati nella Sezione 7.
CORRENTE DI CAMPO
(ampère)
Fig. 13 Mappatura
“ramp restraint” per
controller con campo
minimo impostato a 3
amp., campo massimo
a 18 amp., e corrente
limite di frenatura a 300
amp.
VERIFICA
Manuale
Curtis
1243 GEN 2
4. Con l’interruttore dell’interblocco chiuso, selezionare una direzione
ed azionare l’acceleratore. Il motore dovrebbe iniziare a girare nella
direzione selezionata. In caso contrario, innanzitutto verificare i
collegamenti elettrici agli interruttori di marcia avanti e indietro.
Manuale
Curtis
1243 GEN 2
53
3 — PARAMETRI PROGRAMMABILI: Clonazione del controller
CLONAZIONE
3 — PARAMETRI PROGRAMMABILI: Parametri frenatura
DEL
TAPER
CONTROLLER
Il “taper rate” determina la rapidità con cui il veicolo cambia direzione sul
limite estremo di frenatura, appena prima che il veicolo smetta di
muoversi nella direzione originaria. Valori bassi di “taper rate” causano
cambiamenti di direzione più rapidi e più bruschi. Valori superiori
causano cambiamenti di direzione più lenti e più graduali. Il “taper rate”
è regolabile da 1 a 20. Il “taper rate” viene regolato come parte del
processo di regolazione della prestazione del veicolo (Sezione 5).
Una volta che il controller è stato programmato sulle
impostazioni desiderate, queste possono essere
trasferite in gruppo ad altri controller, creando così una
famiglia di controller “clonati” con identiche impostazioni.
Nota: La clonazione funziona solo tra controller con lo
stesso numero di modello e la stessa versione di software.
Per effettuare la clonazione, collegare il
programmatore 1311 al controller che possiede le
impostazioni desiderate. Scorrere in giù fino al menu
delle funzioni; “Impostazioni” è l’unica funzione inclusa
qui. Selezionate “Ottenere le impostazioni dal controller”
per copiare le impostazioni nel programmatore, poi
selezionate “+” per salvare le impostazioni o “-” per
interromperle.
Collegate il programmatore al controller che volete
abbia queste stesse impostazioni, e selezionate “Scrivere
impostazioni sul controller.”
52
Manuale
Curtis
RATE
VARIABLE
BRAKE
Il parametro di “variable brake” determina il modo in cui il controller
applica la forza di frenatura quando viene richiesta la frenatura di
inversione di direzione. Se il parametro di “variable brake” viene
programmato su “On”, la quantità di corrente di frenatura usata dal
controller sarà proporzionale alla posizione dell’acceleratore quando
viene richiesta la frenatura. Con “variable brake” l’operatore può usare
l’acceleratore per controllare la quantità di forza frenante applicata ad un
veicolo in movimento. L’inversione dell’acceleratore rispetto alla
direzione del veicolo comporta un aumento di corrente di frenatura a
recupero applicata al motore, rallentando il veicolo più velocemente.
Se si preferisce una quantità fissa di forza di frenatura, il parametro
deve essere programmato su “Off”, così che il controller utilizzi l’intera
corrente di frenatura specificata all’occorrenza.
1243 GEN 2
Manuale
Curtis
1243 GEN 2
25
3 — PARAMETRI PROGRAMMABILI: Parametri codici di errore
3 — PARAMETRI PROGRAMMABILI: Parametri frenatura interblocco
Parametri codici di errore
Parametri frenatura interblocco
FAULT CODE
Se l’interruttore interblocco si aziona mentre il veicolo viene guidato, il
controller usa il motore per applicare una frenatura a recupero non
appena il Ritardo Sequenziale programmato (vedi pagina 42) si
estingue. Questa frenatura—che è detta frenatura interblocco—riduce
fortemente il consumo del freno elettromagnetico e permette al veicolo
di soddisfare anche i requisiti di distanza di arresto più rigorosi.
Il freno elettromagnetico viene azionato non appena la frenatura
interblocco porta la velocità del motore approssimativamente a zero. Fare
attenzione al fatto che, per sicurezza, il freno EM si innesta dopo il
Ritardo del Freno Interblocco programmato (vedi pagina 28), anche se
la frenatura interblocco non porta la velocità del motore vicina a zero.
I sette parametri di “interlock braking rate” influenzano la frenatura
a recupero, che si attiva quando viene azionato l’interruttore interblocco
mentre il veicolo viene guidato.
Il controller 1243GEN2 ha due uscite che indicano la presenza di un errore,
ai Pin 2 e 3, che possono essere utilizzati per trasmettere segnali ai LED
situati sul pannello del display o su qualsiasi pannello a distanza. Le
uscite di errore possono essere configurate per visualizzare gli errori in
due differenti formati: formato di codice di errore o formato della
categoria di errore.
Nel formato Fault Code (parametro “On”), le due uscite di errore
funzionano indipendentemente l’una dall’altra. Quando è presente un
errore, il driver Errore1(Pin 2) emette un segnale a impulsi corrispondente
al codice di errore segnalato dal LED di stato incorporato nel controller;
i codici di errore sono indicati nella Tabella 8 a pagina 74. Il driver Errore
2 (Pin 3) va al negativo (verso B-) se è presente un errore, e può essere
utilizzato per azionare un LED di errore/non errore. Se non ci sono errori,
le uscite Errore 1 e Errore 2 saranno entrambe aperte.
Nel formato Fault Category (parametro “Off”), ciascuna
combinazione delle due uscite di errore determina una delle quattro
categorie di errore. Nella Tabella 6 sono indicati gli errori possibili per
ogni categoria.
Nota: In alternativa, il Pin 2 può essere utilizzato come entrata del
regolatore di pompa, ed il Pin 3 può essere usato per interfacciare un
circuito di attivazione ausiliario esterno. Fare riferimento allo schema
elettrico delle uscite di errore a pagina 14.
INT BRAKE RATE
La “interlock braking rate” definisce il tempo necessario al controller per
aumentare l’uscita di frenatura da 0% a 100% (come è stabilito dai valori
di massima corrente di recupero prestabiliti) quando viene innestata la
frenatura interblocco. La “interlock braking rate” è regolabile da 0.1 a 3.0
secondi.
Tabella 6
CATEGORIA
USCITA
USCITA
DI ERRORE ERRORE 1 ERRORE 2
MAX FWD REGEN
Il parametro “maximum forward regen” definisce la massima corrente di
recupero con carico massimo mentre si sposta in avanti. La massima
corrente di recupero durante la marcia in avanti è regolabile da 100 amp.
fino alla massima corrente del controller.
Se non viene usato un sensore del carico, questa sarà l’unica
massima corrente di recupero in avanti.
CATEGORIE DI ERRORI
POSSIBILI
ERRORI
PRESENTI
0
POSITIVO
POSITIVO
(non sono presenti errori)
1
N E G AT I V O
POSITIVO
shunt di corrente, HW Failsafe, M-cortocircuitato,
wiper acceleratore pos. o neg., errore del colleg.
elettr. di inversione di emergenza, apertura
avvolgimento di campo, bobina del contattore o
campo cortocircuitato, contattore principale
saldato o mancante
2
POSITIVO
NEGATIVO
basso voltaggio batteria, sovravoltaggio,
riduzione termica
3
N E G AT I V O
MAX REV REGEN
Il parametro “maximum reverse regen” definisce la massima corrente di
recupero con carico massimo mentre si sposta indietro. La massima
corrente di recupero all’indietro è regolabile da 100 amp. fino alla
massima corrente del controller.
Se non viene usato un sensore del carico, questa sarà l’unica
massima corrente di recupero all’indietro.
26
Manuale
Curtis
1243 GEN 2
BDI
NEGATIVO Anti-Tiedown, HPD, SRO, Timer di servizio
terminato o Timer di disattivazione, Motore troppo
caldo
LOCKOUT
Quando il parametro di “BDI lockout” è programmato su “On”, l’uscita
Errore 2 (al Pin 3) può essere utilizzata come interfaccia ad un circuito
di attivazione ausiliario esterno. Se BDI% = 0, l’uscita Errore 2 sarà
positiva; se BDI%=1, l’uscita Errore 2 sarà negativa.
Quando il parametro di “BDI lockout” è programmato su “Off”,
l’uscita Errore 2 viene determinata impostando il parametro di “Fault
Code”.
Manuale
Curtis
1243 GEN 2
51
3 — PARAMETRI PROGRAMMABILI: Parametri
3 — PARAMETRI PROGRAMMABILI: BDI
Tabella 5
PER
BATTERIE
E
SIGILLATE
CHE
NON
RICHIEDONO
BATTERIA DA 24 V
PARAMETRO
Se l’applicazione ha carichi molto variabili, si raccomanda di includere
un sensore del carico (al Pin 1). L’uso di un sensore del carico può
prevenire inutili brusche frenature con carichi leggeri che potrebbero
immobilizzare le ruote.
VOLTAGGI STANDARD BATTERIA
PIOMBO-ACIDO
INGOLFATA
SIGILLATA
MANUTENZIONE
BATTERIA DA 36 V
INGOLFATA
frenatura interblocco
SIGILLATA
MIN FWD REGEN [applicabile solo con sensore di carico facoltativo]
Full Volts
Empty Volts
Reset Volts
24.5 V
24.5 V
36.7 V
36.7 V
(2.04 × 12)
(2.04 × 12)
(2.04 × 18)
(2.04 × 18)
20.9 V
22.9 V
31.3 V
34.4 V
(1.74 × 12)
(1.74 × 12)
(1.91 × 18)
(1.91 × 18)
25.2 V
25.2 V
37.8 V
37.8 V
(2.10 × 12)
(2.10 × 12)
(2.10 × 18)
(2.10 × 18)
Il parametro di “minimum forward regen” definisce la massima corrente
di recupero con un carico minimo mentre si sposta in avanti. La minima
corrente di recupero in avanti è regolabile da 25 amp. fino alla massima
corrente del controller. La corrente di recupero in avanti aumenta in
modo lineare da “Min Fwd Regen” a “Max Fwd Regen”, al variare
dell’entrata del sensore di carico da “Min Load Volts” a “Max Load Volts”.
Nota: Se la tensione del sensore di carico è fuori portata (inferiore
a 0.2 V o superiore a 4.8 V), durante la frenatura interblocco, mentre il
veicolo si sta spostando in avanti, la corrente di recupero non
corrisponderà al valore programmato di “Max Fwd Regen”.
Nota: Per convertire il VPC agli attuali voltaggi pieno, nullo e di ripristino
moltiplica il VPC per 12 nei sistemi da 24V o per 18 nei sistemi da 36V.
gio di ripristino può essere compreso tra il valore di pieno voltaggio
programmato e 3,00 VPC, con variazioni di 0,01 VPC.
MIN REV REGEN [applicabile solo con sensore di carico facoltativo]
BATTERY
ADJUST
Il parametro di “minimum reverse regen” definisce la massima corrente
di recupero con un carico minimo mentre si sposta all’indietro. La
minima corrente di recupero all’indietro è regolabile da 25 amp. fino alla
massima corrente del controller. La corrente di recupero all’indietro
aumenta in modo lineare da “Min Rev Regen” a “Max Rev Regen” al
variare dell’entrata del sensore di carico da “Min Load Volts” a “Max
Load Volts”.
Nota: Se la tensione del sensore di carico è fuori portata (inferiore
a 0.2 V o superiore a 4.8 V) durante la frenatura interblocco, mentre il
veicolo si sta spostando all’indietro, la corrente di recupero non
corrisponderà al valore programmato di “Max Rev Regen”.
Il parametro di “battery adjustment” viene usato per regolare l’algoritmo
del BDI per compensare la capacità elettrica della batteria. Le batterie
ad alta capacità elettrica possono resistere più tempo al di sotto del
valore di pieno voltaggio prima di cominciare a scaricarsi. Il parametro
di “battery adjustment” regola il numero di secondi necessari prima che
lo stato di carica della batteria diminuisca dell’1%. Esso può essere
impostato tra 0,1 e 20,0 secondi.
BDI DISABLE
Il parametro di “BDI disable”, se programmato su “On”, regola la velocità
massima del veicolo al valore di “BDI limit speed” quando lo stato di
carica della batteria è 0%.
MAX LOAD VOLTS [applicabile solo con sensore di carico facoltativo]
BDI LIMIT SPEED
Il parametro di “maximum load volts” definisce la tensione di entrata del
sensore di carico con il massimo carico. E’ regolabile da 0.2 V a 4.8 V.
Il parametro di “BDI limit speed” indica la velocità massima del veicolo
ammessa, quando il parametro di disattivazione BDI è programmato su
“On” e lo stato di carica della batteria è 0%. La velocità limite BDI è
regolabile tra 0 e 100% della potenza di trasmissione.
Se il parametro di disattivazione BDI è programmato su “Off”, la
velocità limite BDI non è attiva.
50
Manuale
Curtis
1243 GEN 2
MIN LOAD VOLTS [applicabile solo con sensore di carico facoltativo]
Il parametro di “minimum load volts” definisce la tensione di entrata del
sensore di carico con il minimo carico. E’ regolabile da 0.2 V fino ai “Max
Load Volts” programmati.
Manuale
Curtis
1243 GEN 2
27
3 — PARAMETRI PROGRAMMABILI: BDI
3 — PARAMETRI PROGRAMMABILI: Parametri freno elettromagnetico
Parametri indicatore scarica batteria (BDI)
Parametri freno elettromagnetico
L’indicatore della scarica della batteria calcola in maniera costante lo
stato di carica della batteria quando il KSI è acceso. Quando il KSI è
spento, lo stato attuale di carica della batteria viene registrato in una
memoria non-volatile. Le informazioni sul BDI vengono visualizzate
tramite il display Spyglass e come BDI% tramite il menu del monitor
del programmatore 1311. Per regolare il display vengono utilizzati tre
parametri.
I valori standard per le batterie piombo-acido e per le batterie a
tenuta stagna esenti da manutenzione sono indicati nella tabella
sottostante:
I quattro parametri del freno elettromagnetico—insieme al ritardo
sequenziale—influenzano il comportamento del driver ausiliario al
Pin 8. Questo driver viene tipicamente usato per un freno
elettromagnetico, come è mostrato nello schema elettrico di base (Fig.
3, pagina 7). Vedi Fig. 14 per un’illustrazione del rapporto tra la
frenatura interblocco, il freno EM, ed i ritardi di frenatura sequenziali,
ausiliari ed interblocco.
AUX TYPE
Il parametro “auxiliary driver type” configura il driver del lato inferiore al
Pin 8. Il driver ausiliario può essere programmato per funzionare in
qualunque configurazione (Tipi dall’1 al 5) elencata nella Tabella 3. I Tipi
dall’1 al 4 sono vari modi di configurare il driver per un freno
elettromagnetico; il Tipo 5 è un’opzione freno non EM. Se non viene
connesso al Pin 8 nessun dispositivo ausiliario, il driver ausiliario
dovrebbe essere programmato sul Tipo 0.
TIPO DI BATTERIA
L’uscita del driver ausiliario (al Pin 8) può essere modulata se si sta
usando un freno EM (o altri dispositivi ausiliari) il cui valore di voltaggio
della bobina è inferiore al voltaggio della batteria. Se il parametro di
“electromagnetic brake PWM” è programmato su “On”, il freno andrà
avanti fino a 100% PWM (piena potenza fino a 3 amp.) per 500 ms e poi
tornerà indietro a 62.5% PWM (max. ³2 amp.) ad una frequenza di circa
250 Hz, e continuerà su questo livello finchè verrà rilasciato. Se
programmato su “Off”, l’uscita del driver ausiliario rimarrà costantemente
a 100% PWM.
2,04
2,04
Empty Volts (VPC)
1,74
1,91
Reset Volts (VPC)
2,10
2,10
Nota: I valori del BDI vengono impostati senza la virgola decimale; il
valore 2,04 volt per elemento apparirà, per esempio, come 204 (cioè
VPC per 100) sul programmatore. Il pieno voltagio, il voltaggio nullo e
quello di ripristino vengono impostati nelle unità VPC. I voltaggi concernenti
l’intera batteria (anziché i valori VPC) sono indicati nella Tabella 5.
FULL VOLTS
Il parametro di “full voltage” indica il valore del voltaggio della batteria
calcolato quando lo stato di carica è al 100%. Quando il valore di carica
di una batteria scende al di sotto di tale parametro, significa che la
batteria sta cominciando a scaricarsi. Il valore di pieno voltaggio è
compreso tra il valore di voltaggio nullo e il valore programmato di
voltaggio di ripristino, con variazioni di 0,01 VPC.
Dopo avere regolato i valori di pieno voltaggio, il KSI deve essere
riciclato affinchè le nuove impostazioni abbiano effetto.
DELAY
Il parametro di “auxiliary driver delay” consente un ritardo prima che
venga usato il freno elettromagnetico (driver Pin 8 aperto), dopo che il
veicolo abbia raggiunto uno stato neutrale (acceleratore con interruttori
neutrali, aperti in entrambe le direzioni, velocità del motore
approssimativamente a zero). Il parametro di “Aux Delay” è regolabile
da 0 a 30 secondi. Quando è impostato a 0, non vi è alcun ritardo ed il
freno viene azionato non appena il veicolo raggiunge lo stato neutrale.
Questo parametro non si applica all’”Aux Type 1” (vedi Tabella 3).
Per l’”Aux Type 5” il dispositivo collegato al Pin 8 viene spento
quando il driver del Pin 8 è aperto, ed acceso quando il driver è chiuso.
Il ritardo ausiliario potrebbe essere usato per permettere al dispositivo
ausiliario di continuare a funzionare per un breve periodo dopo che il
veicolo abbia raggiunto lo stato neutrale.
EMPTY
RESET
Curtis
1243 GEN 2
VOLTS
Il parametro di “reset volts” consente di impostare il valore di voltaggio
della batteria usato per determinare il punto di stato di carica al 100% su
una batteria senza carica. Quando il voltaggio di ripristino programmato
persiste per due secondi (tranne che nel caso di frenatura a recupero),
il BDI % ripristinerà automaticamente il valore a 100%. Il valore del
voltag-
Il parametro di “interlock brake delay” consente un ritardo prima che
venga usato il freno elettromagnetico, dopo che l’interruttore interblocco
si è aperto. La frenatura interblocco è efficace durante questo periodo.
Il freno elettromagnetico viene usato quando il ritardo è terminato o
Manuale
VOLTS
Il parametro di “empty voltage” indica il voltaggio della batteria calcolato
quando lo stato di carica è allo 0%. Quando il voltaggio della batteria
rimane al di sotto di questo valore in maniera costante, il BDI leggerà:
stato di carica 0%. Il valore di voltaggio nullo può essere compreso tra
1,50 e il valore di pieno voltaggio programmato, con variazioni di 0,01
VPC.
Dopo avere regolato il valore di voltaggio nullo, il KSI deve essere
riciclato affinchè le nuove impostazioni abbiano effetto.
INT BRAKE DELAY
28
SIGILLATA
Full Volts (VPC)
Valori non standard possono essere ammessi solo se analizzati da un
ingegnere della Società Curtis sulla base di specifici tipi di batterie.
EM BRAKE PWM
AUX
INGOLFATA
Manuale
Curtis
1243 GEN 2
49
3 — PARAMETRI PROGRAMMABILI: Parametri freno elettromagnetico
3 — PARAMETRI PROGRAMMABILI: Contaore
Altri parametri contaore
HOURMETER
TYPE
L’indicatore Spyglass mostra i dati del contaore per 5 secondi ogni volta
che l’interruttore a chiave è inserito. Il parametro di “hourmeter type”
determina se i dati del contaore totale o quelli del contaore a trazione
verranno visualizzati. Quando questo parametro è programmato su
“On”, viene visualizzato il contaore totale; quando è programmato su
“Off”, viene visualizzato il contaore di trazione.
PUMP
Parametri del
freno elettromagnetico,
nel contesto dei quattro
parametri di ritardo del
sistema di controllo
1243GEN2
(sequenziamento, freno
interblocco, contattore
principale aperto, e
ritardi ausiliari). Questo
dato assume la
configurazione standard
degli schemi elettrici,
che comprende un freno
EM.
Fig. 14
METER
Il parametro di “pump meter”, quando è programmato su “On”, configura
la linea di Uscita Errore 1 (al Pin 2) come un’entrata per misurare le ore
di funzionamento della pompa. La pompa è considerata in funzione
quando il Pin 2 è allo stesso voltaggio della batteria. Quando il
parametro di “pump meter” è programmato su “On”, il contaore di
trazione funge da contaore pompa/trazione combinate, e tutti i parametri
del contaore di trazione descritto sopra si riferiscono sia alle ore di
trazione che a quelle della pompa. Il contaore trazione/pompa conta le
ore di selezione della direzione e le ore di funzionamento della pompa.
INTERRUTTORE
INTERBLOCCO SI APRE
Ritardo Sequenziale
Errore HPD (HPD Tipo 1)
Errore SRO
Frenatura Interblocco dal motore
(applicata finchè la velocità del
motore è circa a zero)
Ritardo del Freno Interblocco
Per le descrizioni del
ritardo sequenziale e del
ritardo aperto del
contattore principale,
vedi le pagine 42 e 40.
Il freno elettromagnetico si
aziona, a meno che si sia
già azionato al termine del
ritardo del freno interblocco.
Il freno elettromagnetico si
aziona, a meno che si sia
già azionato al termine
della frenatura interblocco.
Ritardo ausiliario
Il
contattore
principale
si apre.
IL VEICOLO
RAGGIUNGE LO
STATO NEUTRALE
Ritardo ausiliario
Il freno elettromagnetico si aziona
per i Tipi ausiliari 2, 3 e 4.
* Lo stato neutrale viene raggiunto quando, durante il
funzionamento normale, l’l’ acceleratore è in folle, entrambe
gli interruttori di direzione sono aperti, e la velocità del
motore è quasi a zero.
quando la velocità del motore si avvicina a zero; non importa quale delle
due cose avvenga prima. Il ritardo del freno interblocco è regolabile da
0.0 a 8.0 secondi. Quando è impostato su 0, non vi è alcun ritardo ed il
freno si innesta non appena l’interruttore interblocco si apre. La frenatura
interblocco continua finchè la velocità del motore raggiunge lo zero.
Per l’”Aux Type 5” non viene applicato il ritardo di frenatura
interblocco.
48
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
29
3 — PARAMETRI PROGRAMMABILI: Parametri
3 — PARAMETRI PROGRAMMABILI: Contaore
freno elettromagnetico
Impostare il parametro a 0 significa che il timer di disattivazione
trazione non si esaurirà mai e quindi non richiamerà mai la velocità
errata di trazione.
Tabella 3 OPZIONI DI CONFIGURAZIONE:
“AUXILIARY DRIVER” (Pin 8)
TIPO
DESCRIZIONE DEL FUNZIONAMENTO
TRAC FAULT SPD
0
1
Driver ausiliario disattivato.
Il parametro di “traction fault speed” imposta la massima velocità di
guida nel caso in cui si estinguano il timer di disattivazione della trazione
o il timer di disattivazione totale; può essere regolato tra 0–100% di
uscita guida, e si applica a tutti i modi.
Freno elettromagnetico usato come freno di stazionamento.
• Il freno viene rilasciato quando l’interruttore interblocco si chiude.
• Il freno viene innestato come segue:
Resettaggio del timer di servizio contaore
Interblocco Il driver ausiliario attiva il freno quando l’interruttore interblocco
si apre e (a) il “Sequencing Delay” e l’“Interlock Brake Delay” programmati
scadono o (b) la velocità del motore si avvicina a 0; non importa quale delle
due accade prima.
I timer di servizio contaore devono essere azzerati (programmati su
“Off”) dopo che è stato svolto il servizio, usando i parametri di “Service
Total” e “Service Traction”.
Occasionalmente il veicolo può essere sottoposto a manutenzione
prima che venga svolta la sua manutenzione programmata—per
esempio, a causa di qualche problema specifico. A questo punto
potreste voler controllare i timer di servizio per vedere quante ore
hanno accumulato. Se la manutenzione ordinaria scade dopo poco
tempo, la potreste svolgere adesso, e ripristinare il timer di servizio
appropriato—evitando così un viaggio inutile al negozio.
Stato Neutrale * Il driver ausiliario non reagisce alla condizione neutrale;
perciò non vi è alcun ritardo ausiliario.
Inv. Emerg. Il driver ausiliario non reagisce all’inversione di emergenza.
2
Freno elettromagnetico usato per evitare il rotolamento quando si ferma su
una collina.
• Il freno viene rilasciato quando l’interruttore interblocco si chiude e
l’interruttore di direzione o quello di inversione di emergenza si chiudono.
• Il freno viene attivato nella maniera seguente:
Interblocco Lo stesso che per il Tipo 1.
Stato Neutrale * Quando il veicolo raggiunge lo tato neutrale, il driver ausiliario
attiva il freno non appena l’“Aux Delay” programmato si estingue.
SERVICE
3
Il freno elettromagnetico funziona come nel Tipo 2 tranne che durante l’Invers.
di Emerg.
Inv. Emerg. (a) Se entrambe gli interruttori di direzione sono aperti quando
l’interruttore di inversione di emergenza viene rilasciato, accade come per il
Tipo 2. (b) Se un interruttore di direzione è chiuso quando l’interruttore di
inversione di emergenza viene rilasciato, il cronometro di “Aux Delay” si
attiva quando l’interruttore di inversione di emergenza viene rilasciato.
4
Il freno elettromagnetico funziona come nel Tipo 1 tranne che durante l’Invers.
di Emerg.
Inv. Emerg. Lo stesso che per il Tipo 3, tranne che nella situazione (a), in
cui il driver ausiliario non risponde, e quindi il freno rimane rilasciato.
5
Dispositivo ausiliario diverso dal freno elettromagnetico.
SERVICE
Questa opzione è appropriata, ad esempio, se il driver ausiliario viene usato
per un contattore a spazzola o che attiva un motore pompa, o come aiuto allo
sterzo idrulico. Il driver ausiliario viene messo sotto tensione quando
l’interruttore interblocco e quello di direzione o quello di inversione di
emergenza vengono chiusi. Il driver ausiliario si spegne quando termina il
Ritardo Ausiliario programmato, dopo che l’interruttore interblocco si è aperto,
o entrambe gli interruttori di direzione vengono aperti mentre il veicolo si sta
muovendo, o l’interruttore di inversione di emergenza viene rilasciato. Il
cronometro del Ritardo Ausiliario si attiva quando la velocità del motore si
avvicina a zero.
*
Lo stato neutro viene raggiunto quando, durante il funzionamento normale, l’acceleratore è in
Manuale
Curtis
1243 GEN 2
TRAC
Quando il timer di servizio trazione si estingue, il controller imposta
automaticamente il parametro di “service traction” su “On”. Questo
parametro deve allora essere programmato su “Off” per indicare che il
servizio appropriato è stato svolto.
Se un veicolo viene portato dentro per la manutenzione prima che
venga emesso un avviso di servizio, potete controllare le ore di servizio
di trazione accumulate. Collegate il programmatore 1311 ed andate al
menu del monitor. Moltiplicate il valore “Trac Srvc X25” per 25 ed
aggiungete il valore “+Trac Srvc”; ciò indica quante ore di trazione sono
trascorse dal momento in cui il timer di servizio di trazione è stato
azzerato per l’ultima volta.
Quando la manutenzione viene svolta prima che il timer di servizio
di trazione si sia esaurito, il parametro di “service traction” deve essere
programmato su “On” e poi su “Off” per essere azzerato.
posizione neutra, non è selezionata alcuna direzione (entrambe gli interruttori di direzione
aperti), e la velocità del motore è approssimativamente a zero.
30
TOTL
Quando il timer di servizio totale si esaurisce, il controller imposta
automaticamente il parametro di “service total” su “On”. Questo parametro
deve quindi essere programmato su “Off” per indicare che il servizio
appropriato è stato svolto.
Se un veicolo viene sottoposto a manutenzione prima che venga
emesso un avvertimento di manutenzione, potete controllare le ore di
servizio totale accumulate. Inserite la spina del programmatore 1311 e
andate al menu del monitor. Moltiplicate il valore “Tot Srvc X25” per 25
ed aggiungete il valore “+Tot Srvc”; ciò indica il numero di ore totali
trascorse dal momento in cui il timer di servizio totale è stato riazzerato
per l’ultima volta.
Quando la manutenzione viene svolta prima che il timer di servizio
totale si sia esaurito, il parametro di “service total” deve essere
programmato su “On” e poi su “Off” per essere azzerato.
Inv. Emerg. Dopo che l’interruttore di inversione di emergenza è stato usato
e rilasciato, il driver ausiliario attiva il freno non appena termina l’”Aux Delay”
programmato. Il cronometro di “Aux Delay” si attiva quando la velocità del
motore si avvicina a zero.
Manuale
Curtis
1243 GEN 2
47
3 — PARAMETRI PROGRAMMABILI: Parametri velocità
3 — PARAMETRI PROGRAMMABILI: Contaore
Una volta che i valori preimpostati sono stati caricati, il parametro
di “Set Total Hours” dovrebbe essere programmato su “Off”.
Parametri velocità
M1–M4, MAX FWD SPD
Il parametro di “maximum forward speed” definisce la massima tensione
di uscita del controller ad acceleratore massimo, nella direzione di
marcia in avanti. Questo parametro è regolabile dalla velocità
micrometrica programmata fino a 100%. Viene regolato come parte del
processo di regolazione della prestazione del veicolo (Sezione 5).
SET TRAC HOURS
Il parametro di “set traction hours” viene usato per applicare al contaore
di trazione i valori preimpostati alti, medi e bassi. Prima di tutto regolate
come desiderato i valori preimpostati. Quindi programmate il parametro
di “set traction hours” su “On”, e quest’ultimo carica automatimaticamente
i valori preimpostati. Una volta caricati, il parametro dovrebbe essere
programmato su “Off”.
M1–M4, MAX REV SPD
Il parametro di “maximum reverse speed” definisce la massima tensione
di uscita del controller ad acceleratore massimo, nella direzione opposta.
Questo parametro è regolabile da 0% a 100%. Viene regolato come
parte del processo di regolazione della prestazione del veicolo (Sezione
5).
Impostazione del timer di servizio del contaore
SRVC TOTL HRS
Il parametro di “total service hours” serve ad impostare il timer per la
successiva manutenzione generale programmata. L’intervallo di servizio
può essere al massimo di 5.000 ore. Il timer di servizio totale è regolabile
tra 0,0 e 50,0, con aumenti dello 0,5, dove 25,0 equivale a 2.500 ore
(25,0 × 100).
Impostare il parametro a 0 significa che il timer non si esaurirà
mai—cioè, non vi sarà alcun sollecito di manutenzione generale.
CREEP
SPEED
Il parametro di “creep speed” definisce l’uscita iniziale del controller
generata alla prima selezione di direzione. Non è necessario applicare
alcun acceleratore per permettere al veicolo di entrare in modalità
micrometrica, bensì solo un segnale di direzione. Il controller mantiene
la velocità micrometrica finchè l’acceleratore non viene portato fuori
dalla zona morta (generalmente il 10% dell’acceleratore).
La “creep speed” è regolabile da 0% a 25% dell’uscita del controller; non può essere impostata ad un valore più alto del più basso valore
programmato di “maximum forward speed M1–M4”. La velocità
micrometrica specificata non viene visualizzata come percentuale
dell’acceleratore nel Menu di Verifica del programmatore quando viene
selezionata una direzione e viene usato l’acceleratore a zero. Viene
visualizzato solo 0% del comando acceleratore.
SRVC TRAC HRS
Il parametro di “traction service hours” serve a regolare il timer per la
successiva manutenzione generale programmata. L’intervallo di servizio
può essere al massimo di 5.000 ore. Il timer di servizio di trazione è
regolabile tra 0,0 e 50,0, con aumenti dello 0,5, dove 25,0 equivale a
2.500 ore (25,0 × 100).
Impostare il parametro a 0 significa che il timer non si esaurirà
mai—cioè, non vi sarà alcun sollecito di manutenzione del motore.
Impostazione del timer di disattivazione del contaore
DIS TOTL HRS
LOAD COMP
Il parametro di “total disable hours” serve a regolare il timer di
disattivazione totale; può essere regolato tra 0 e 250 ore, con aumenti
di 1 ora. Se il timer di disattivazione totale si esaurisce, entra in effetto
la velocità errata di trazione.
Impostare il parametro a 0 significa che il timer di disattivazione
totale non si esaurirà mai e quindi non richiamerà mai la velocità errata
di trazione.
Il parametro di “load compensation” regola attivamente la tensione
applicata al motore in funzione del carico del motore. Ciò comporta
velocità del veicolo più costanti su superfici diverse (rampe, terreno
accidentato, ecc.) senza che l’operatore del veicolo debba costantemente
regolare la posizione dell’acceleratore. Inoltre serve anche a pareggiare
le velocità di veicoli carichi e scarichi. Questo parametro è regolabile da
0% a 25% dell’uscita PWM del controller. Valori superiori causano un
intervento più aggressivo del controller nel tentativo di mantenere la
velocità del veicolo. Comunque, un’eccessiva compensazione del carico
può comportare partenze a scatti e oscillazioni della velocità
(“pendolamento”) quando il veicolo è scarico.
Il parametro di “load compensation” viene regolato come parte del
processo di regolazione della prestazione del veicolo (Sezione 5).
DIS TRAC HRS
Il parametro di “traction disable hours” viene usato per impostare il timer
di disattivazione trazione; può essere regolato tra 0 e 250 ore, con
aumenti di 1 ora. Se il timer di disattivazione trazione si esaurisce, la
velocità errata di trazione fa effetto.
46
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
31
3 — PARAMETRI PROGRAMMABILI: Parametri acceleratore
3 — PARAMETRI PROGRAMMABILI: Contaore
Parametri Contaore
Parametri acceleratore
THROTTLE
All’interno del controller 1243GEN2 sono costruiti due singoli contaore,
ognuno con memoria non volatile:
•
un contaore totale, che misura il tempo di funzionamento
totale (“KSI on-time”), e
•
un contaore a trazione, che misura il tempo in cui viene
selezionata una direzione.
Ogni contaore ha un rispettivo timer di servizio ed un timer di
disattivazione. Le informazioni riguardanti il contaore possono essere
visualizzate per mezzo del programmatore o del display Spyglass.
Per ogni contaore, il timer di servizio viene usato per impostare il
tempo prima che sia terminata la manutenzione programmata. Quando
termina il tempo di servizio impostato, si ha l’errore di avvertimento di
servizio e si innesta il timer di disattivazione. Se il tempo di disattivazione
programmato termina prima che venga eseguita la manutenzione
programmata, il controller non rispetterà la velocità di trazione errata
programmata.
TYPE
Il controller 1243GEN2 accetta molteplici tipi di entrate acceleratore. Nella
Sezione 2 vengono fornite le istruzioni per collegare gli acceleratori più
comunemente usati: potenziometri a 2 fili da 5kΩ–0 e 0–5kΩ,
potenziometri a 3 fili, acceleratori da 0–5V, prese di corrente, ed
acceleratori elettronici Curtis ET-XXX.
Il parametro di “throttle type” può essere programmato su 1, 2, 3,
o 4. Le opzioni standard del tipo di segnale di entrata dell’acceleratore
sono elencate nella Tabella 4.
Tabella 4
TIPO
ACCELERATORE
TIPI DI ACCELERATORE PROGRAMMABILI
DESCRIZIONE
1
potenziometro a 2 fili da 5k Ω –0
2
potenziometro a 3 fili asimmetrico con gamma da 1k Ω a
10k Ω ;
sorgente di tensione da 0–5V;
presa di corrente che guida il resistore esterno;
o acceleratore elettronico Curtis ET-XXX
3
potenziometro a 2 fili da 0–5k Ω
4
potenziometro a 3 fili bidirezionale con gamma da 1k Ω a
10k Ω ;
sorgente di tensione da 0–5V;
o presa di corrente che guida il resistore esterno
Impostazioni “preimpostate” del contaore
Il controller 1243GEN2 viene trasportato dalla fabbrica con ognuno dei
suoi due contaore preimpostato a 0. Se il controller viene installato su
un nuovo veicolo, queste preimpostazioni non sono necessarie. Se
comunque il controller viene installato su un veicolo “usato”, sarebbe
preferibile trasferire al nuovo controller i valori del contaore esistenti.
Per fare ciò, i valori esistenti del contaore devono essere inseriti nel
modo seguente.
Ogni misuratore registra il tempo a 999999.9 ore (114 anni), e lo
gira su 000000.0 se questo viene superato. I parametri di “adjust high”,
“adjust middle” e “adjust low” fissano rispettivamente due delle cifre sul
misuratore: HHMMLL.
ADJ HOURS HIGH
THROTTLE
DB
Il parametro “adjust hours high” viene usato per impostare le due cifre più
alte, da 00 a 99.
Il parametro di “throttle deadband” definisce il valore del voltaggio del
wiper dell’acceleratore che il controller interpreta come neutro.
Aumentando la “throttle deadband” impostata aumenta il valore neutro.
Questo parametro è utile specialmente con gruppi di acceleratori che
non tornino ad un punto neutro ben definito, perchè permette una zona
morta ampia abbastanza da assicurare il ritorno del controller alla
posizione neutra quando il meccanismo della acceleratore viene
rilasciato.
Nella Fig. 15 vengono mostrat esempi di regolazioni di “throttle
deadband” (0%, 10%, 40%) per i quattro tipi di acceleratore (vedi
Tabella 4). Per tutti gli esempi in Figura 15 il parametro massimo è
impostato a 100%.
Il parametro di “throttle deadband” è regolabile da 0% a 40% del
valore nominale del wiper dell’acceleratore; la regolazione standard è
del 10%. Il valore nominale del voltaggio del wiper dipende dal tipo di
acceleratore selezionato. Per le caratteristiche del tipo di acceleratore
selezionato, si veda Tabella 1 (pagina 9).
La “throttle deadband” viene regolata come parte del processo di
regolazione della prestazione del veicolo (Sezione 5).
32
Manuale
Curtis
1243 GEN 2
ADJ HOURS MID
Il parametro “adjust hours middle” viene usato per regolare le due cifre
medie, da 00 a 99.
ADJ HOURS LOW
Il parametro “adjust hours low” viene usato per regolare le due cifre più
basse, da 00 a 99. Non è possibile impostare le decine.
SET TOTL HRS
Il parametro di “set total hours” viene usato per applicare al contaore
totale (cioè, “KSI on-time”) i valori alti, medi e bassi preimpostati.
Innanzitutto regolate i valori preimpostati come desiderato per il contaore
totale. Quindi programmate su “On” il parametro di “Set Total Hours” che
carica automaticamente i valori preimpostati.
Manuale
Curtis
1243 GEN 2
45
3 — PARAMETRI PROGRAMMABILI: Parametri acceleratore
3 — PARAMETRI PROGRAMMABILI: Parametri protezione motore
Parametri protezione motore
Effetti della
regolazione del
parametro di “Throttle
Deadband”.
Fig. 15
Il controller 1243GEN2 può proteggere il motore da danni dovuti a
sovratemperatura riducendo la velocità del motore. Una stima della
temperatura del motore può essere fatta sulla base della resistenza
dell’avvolgimento di campo. Il controller misura la corrente di campo,
il PWM di campo e la tensione della batteria, ed usa queste misurazioni
per calcolare la resistenza di campo istantanea. Questo valore viene
filtrato e confrontato con due valori programmati: la “Motor Warm
Resistance” e la “Motor Hot Resistance”. Se la resistenza di campo
raggiunge il valore programmato della “Motor Warm Resistance”, la
velocità massima del motore verrà limitata alla “Warm Speed” programmata. Se la resistenza di campo raggiunge il valore programmato
della “Motor Hot Resistance”, il controller non guiderà più il veicolo, ma
tutte le funzioni di frenatura resteranno attive. Se questa opzione di
protezione del motore non è desiderata, può essere disabilitata
programmando il parametro di “Motor Resistance Compensation” su
“Off”.
Acceleratore
Tipo 1
5k Ω - 0 :
40% Deadband
10% Deadband
0% Deadband
Acceleratore 0-5V, asimmetrico:
Tipo 2
40% Deadband
10% Deadband
WARM
SPEED
Il parametro di “Warm Speed” determina l’uscita della massima velocità
di azionamento quando la resistenza di campo del motore coincide o è
superiore al valore programmato della “Motor Warm Resistance”. La
“Warm Speed” è regolabile da 0 a 100% della potenza di trasmissione.
0% Deadband
Acceleratore
Tipo 3
MOT WRM x10 m Ω
Il parametro di “Motor Warm Resistance” definisce il valore programmato
della resistenza di campo a cui avrà luogo un errore di “Motor Warm” e
la massima velocità sarà controllata dall’impostazione della “Warm
Speed”.
Nota: Il valore del parametro è in unità di dieci-milliohm. Se volete
regolare il valore programmato della “Motor Warm Resistance” a 900 mΩ
(0.9 Ω), dovete inserire 90 per il valore MOT WRM x10 mΩ. Il valore
programmato di “Motor Warm Resistance” è regolabile da 100 mΩ
(MOT WRM x10 mΩ =10) fino al valore programmato di “Motor Hot Resistance”.
40% Deadband
10% Deadband
0% Deadband
Acceleratore
Tipo 4
0-5V,
bidirezionale:
40% Deadband
MOT HOT x10 m Ω
Il parametro di “Motor Hot Resistance” definisce il valore programmato
della resistenza di campo a cui avrà luogo un errore di “Motor Hot” e non
verrà consentita alcuna potenza di trasmissione. E’ regolabile dal valore
programmato della “Motor Warm Resistance” fino a 2500 mΩ (2.5 Ω). Il
valore inserito è in unità di dieci-milliohm, che significa che il valore
massimo di “Motor Hot Resistance” è un decimo di 2500 (cioè, MOT HOT x10
mΩ =250).
10% Deadband
0% Deadband
LEGENDA
MOT Ω COMP
Zona morta
neutra
Il parametro di “motor resistance compensation” viene usato (se
programmato su “On”) per abilitare l’opzione di protezione del motore da
sovratemperatura.
44
0-5k Ω :
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
Uscita
controller
NOTE: I voltaggi mostrati corrispondono al wiper del potenziometro
relativo a B-.
Per i tipi di acceleratore 1 e 3, i punti di zona morta sono
definiti in termini di resistenza pot. nominale 5kΩ. L’uso di
un potenziometro di resistenza inferiore o superiore darà
valori diversi per i punti di zona morta.
Il parametro Throttle Max è fissato a 100%.
33
3 — PARAMETRI PROGRAMMABILI: Parametri acceleratore
THROTTLE
3 — PARAMETRI PROGRAMMABILI: Parametri inversione di emergenza
taneamente ciclato durante il funzionamento. Comunque è importante
tenere a mente che lo stesso ritardo sequenziale ritarda anche l’avvio
della frenatura interblocco (vedi Fig. 14, pagina 29).
Il parametro di “sequencing delay” può essere programmato da 0.0
a 3.0 secondi, dove 0.0 corrisponde a “nessun ritardo”.
MAX
Il parametro “throttle max” fissa il voltaggio o la resistenza del wiper
richiesti per produrre un’uscita del 100% del controller. Una diminuzione
dell’impostazione massima dell’acceleratore riduce il voltaggio o la
resistenza del wiper e quindi la corsa massima necessaria per produrre
un’uscita completa del controller. Questa caratteristica permette di
adattare gruppi acceleratore di valore ridotto.
Gli esempi in Fig. 16 mostrano l’effetto di tre diverse regolazioni
massime degli acceleratori (100%, 90%, 60%) su un voltaggio o
resistenza del wiper a corsa massima richiesto per ottenere un’uscita
del 100% per i quattro tipi acceleratore.
Il programmatore visualizza il parametro “throttle max” come una
percentuale della corsa utile dell’acceleratore, che non viene influenzata
dall’impostazione della zona morta dell’acceleratore. Il parametro “throttle
max” può essere regolato da 100% a 60%; l’impostazione standard è di
90%. Il campo nominale del wiper acceleratore dipende dal tipo di
acceleratore selezionato. Per le caratteristiche del tipo di acceleratore
selezionato si veda la Tabella 1 (pagina 9).
Il parametro di “Throttle Max” viene regolato come parte del processo
di regolazione prestazione del veicolo (Sezione 5).
Effetto della
regolazione del
parametro di “Throttle
Max” (tipi di
acceleratore 1 e 2).
Fig. 16
Parametri inversione di emergenza
+
ATTENZIONE
EMR REV C/L
Quando viene attivata l’inversione di emergenza, il parametro di “emergency reverse current limit” determina la massima corrente di frenatura
durante la decelerazione e la massima corrente di trasmissione dopo
che il veicolo attiva una direzione. Questo parametro è regolabile da 50
amp. fino alla massima corrente di frenatura del controller. (La massima
corrente di frenatura dipende dal modello di controller; vedi le specifiche
tecniche nella Tabella D-1).
Acceleratore 5k Ω -0: Tipo 1
100% Throttle Max
40% Deadband
EMR REV CHECK
Il parametro di “emergency reverse check” può essere utilizzato solo
quando nell’applicazione è presente l’opzione di inversione di emergenza.
Se questa non viene utilizzata, questo parametro dovrebbe essere
impostato su “Off”.
Quando viene abilitato (programmato su “On”), il controllo di
inversione di emergenza verifica la continuità dalla relativa uscita (Pin
10) all’entrata di inversione di emergenza (Pin 13). Quindi i collegamenti
elettrici dell’inversione di emergenza devono essere posti il più vicino
possibile al lato del controller su cui si trova l’interruttore di inversione di
emergenza. Il cablaggio consigliato viene mostrato nello schema elettrico
standard, Fig. 3 (pagina 7).
90% Throttle Max
40% Deadband
90% Throttle Max
10% Deadband
60% Throttle Max
10% Deadband
Acceleratore 0-5V, asimmetrico:
Tipo 2
EMR DIR INTR
100% Throttle Max
40% Deadband
In applicazioni che utilizzano l’opzione di inversione di emergenza, il
parametro di “emergency reverse direction interlock” definisce i requisiti
per ritornare al funzionamento normale dopo aver usato l’inversione di
emergenza. Dopo che è stata usata l’inversione di emergenza, il controller regola l’abilitazione di uscita a zero, indipendentemente dal fatto che
l’acceleratore o un senso di marcia siano ancora inseriti. Con questo
parametro impostato su “On”, l’operatore può o aprire entrambe gli
switch di direzione o riciclare l’interruttore interblocco per permettere un
funzionamento normale. Con il parametro di “emergency reverse direction interlock” impostato su “Off”, l’unico modo per l’operatore di
recuperare il funzionamento normale è di riciclare l’interruttore interblocco.
90% Throttle Max
40% Deadband
90% Throttle Max
10% Deadband
60% Throttle Max
10% Deadband
34
Manuale
Curtis
1243 GEN 2
La polarità delle connessioni S1 e S2 influenzerà il funzionamento
dell’opzione di inversione di emergenza. Gli interruttori di marcia
avanti e indietro e le connessioni S1 e S2 devono essere configurate in
modo tale che il veicolo si allontani dall’operatore quando viene
premuto il pulsante di inversione di emergenza.
Manuale
Curtis
1243 GEN 2
43
3 — PARAMETRI PROGRAMMABILI: Parametri guasto sequenziale
3 — PARAMETRI PROGRAMMABILI: Parametri acceleratore
prima che l’entrata KSI sia stata ricevuta, ma prima che l’interruttore
interblocco sia stato chiuso, il veicolo accelererà fino alla velocità
desiderata non appena l’interruttore interblocco sarà stato chiuso.
SRO
L’opzione di “static return to off” (SRO) evita che il veicolo venga azionato
quando si trova “in marcia inserita”, cioè con una direzione già
selezionata. Questa opzione controlla la sequenza delle entrate KSI e
dell’interblocco relative all’entrata di direzione. Gli errori SRO possono
risultare dall’uso di una sequenza scorretta, o dall’uso di una sequenza
corretta con meno di 50 msec tra le fasi. Se viene dichiarato un errore
SRO, il controller inibirà l’uscita al motore, finchè il guasto verrà cancellato
usando una sequenza accettabile.
Il ritardo sequenziale può essere usato per evitare errori SRO che
altrimenti accadrebbero dall’apertura momentanea dell’interruttore
interblocco durante l’azionamento (vedi Fig. 14, pagina 29). Se
l’interruttore interblocco viene aperto e poi chiuso velocemente prima
che il tempo di ritardo programmato sia terminato, non verrà dichiarato
nessun errore SRO ed il funzionamento non sarà interrotto.
Nota: Le condizioni per gli errori SRO non vengono influenzate dal
fatto che il parametro interblocco del contattore principale sia su “On” o
su “Off”.
Sono disponibili tre tipi di SRO, insieme ad un’opzione “no SRO”.
Effetto della
regolazione del
parametro di “Throttle
Max” (tipi di
acceleratore 3 e 4).
Nessuna percezione di errore SRO
SRO di Tipo 1:
90% Throttle Max
40% Deadband
90% Throttle Max
10% Deadband
60% Throttle Max
10% Deadband
Acceleratore 0-5V, bidirezionale:
Tipo 4
100% Throttle Max
40% Deadband
90% Throttle Max
40% Deadband
KSI ed interblocco prima dell’entrata di direzione
60% Throttle Max
10% Deadband
Per azionare il veicolo, il controller deve ricevere sia un’entrata KSI che
un’entrata interblocco prima di ricevere un’entrata da un qualsiasi
interruttore di direzione. L’ordine con cui vengono ricevute le entrate KSI
e dell’interblocco non conta, conta solo il fatto che siano entrambe
ricevute prima dell’entrata di direzione.
LEGENDA
Zona morta
neutra
KSI prima dell’interblocco prima dell’entrata di direzione
Per azionare il veicolo, il controller deve ricevere un’entrata KSI e poi
un’entrata interblocco prima di ricevere un’entrata da un qualsiasi
interruttore di direzione.
SRO di Tipo 3:
100% Throttle Max
40% Deadband
90% Throttle Max
10% Deadband
SRO di Tipo 0:
SRO di Tipo 2:
Acceleratore 5k Ω -0:
Tipo 3
Fig. 16, cont.
Uscita
controller
NOTE: I voltaggi mostrati corrispondono al wiper del potenziometro
relativo a B-.
Per i tipi di acceleratore 1 e 3, i punti di zona morta sono
definiti in termini di resistenza pot. nominale 5kΩ. L’uso di
un potenziometro di resistenza inferiore o superiore darà
valori diversi per i punti di zona morta.
KSI prima dell’interblocco prima dell’entrata di direzione in
avanti
L’ SRO di Tipo 3 è utile per i veicoli con conducente a terra che operano
spesso su rampe. Per guidare il veicolo nella direzione di marcia in avanti,
il controller deve ricevere il KSI, l’ interblocco, ed entrate in avanti secondo
l’ordine prestabilito, come nell’SRO di Tipo 2. Comunque, questa
sequenza non è richiesta per il funzionamento all’indietro. Con l’SRO di
Tipo 3 è consentita un’entrata di direzione indietro in qualunque punto
della sequenza: cioè prima dell’interblocco, o persino prima del KSI.
SEQUENCING
DLY
L’opzione di “sequencing dly” permette di riciclare l’interruttore
dell’interblocco entro un tempo stabilito—il ritardo sequenziale—senza
attivare l’HPD o l’SRO. Questa caratteristica è utile nelle applicazioni
in cui l’interruttore interblocco può funzionare a scatti o essere momen42
Manuale
Curtis
1243 GEN 2
Manuale
Curtis
1243 GEN 2
35
3 — PARAMETRI PROGRAMMABILI: Parametri errore sequenziale
3 — PARAMETRI PROGRAMMABILI: Parametri acceleratore
THROTTLE
MAP
Parametri errore sequenziale
Il parametro di “throttle map” modifica la risposta del veicolo all’entrata
acceleratore. L’impostazione standard del parametro al 50 % fornisce
una risposta lineare rispetto all’uscita dell’acceleratore. I valori al di sotto
del 50% riducono l’uscita del controller, assicurando una migliore
manovrabilità a velocità lenta. Valori superiori al 50% conferiscono al
veicolo una risposta più rapida a bassa velocità.
La regolazione della “throttle map” può essere programmata tra
20% e 80%. L’impostazione si riferisce all’uscita PWM a metà
acceleratore, come percentuale della corsa utile completa
dell’acceleratore. La corsa utile dell’acceleratore è il voltaggio o la
resistenza tra il punto di modulazione dello 0% (la soglia di “throttle
deadband”) e quello del 100% (la soglia di “throttle max”).
Con “creep speed” impostata a 0 e velocità massima impostata al
100%, una regolazione di “throttle map” del 50% darà un’uscita del 50%
a metà acceleratore. Un’impostazione di “throttle map” dell’80% darà
un’uscita dell’80% a metà acceleratore. La Fig. 17 mostra sei profili di
“throttle map” (20, 30, 40, 50, 60, e 80%); in tutti questi esempi la “creep
speed” è fissata a 0 e la velocità massima al 100%.
La caratteristica di “anti-tiedown” evita che gli operatori avvolgano con
nastro isolante o “blocchino” gli interruttori di selezione del modo per
funzionare costantemente nel Modo 2 o 4 (che sono generalmente le
modalità di velocità più elevate). Ogni volta che l’interruttore interblocco
si chiude, la caratteristica di “anti-tiedown” verifica quale modo è stata
selezionato. Se gli interruttori di selezione del modo stanno richiedendo
il Modo 2 o 4 (interruttore di selezione Modo 1 chiuso), il controller non
soddisferà il Modo 1 o 3, a seconda della posizione dell’interruttore di
selezione Modo 2, e verrà dichiarato un guasto di “anti-tiedown”. Il
controller resterà quindi nel Modo 1 o 3 finchè l’interruttore 1 di selezione
Modo viene rilasciato e riattivato. La caratteristica di “anti-tiedown” può
essere programmata su “On” o su “Off”.
HPD
Il parametro di “high pedal disable” (HPD) impedisce che il veicolo
venga azionato se è già stata impiegata un’accelerazione superiore al
25%. Oltre a fornire partenze regolari, l’HPD evita anche improvvise
partenze accidentali nel caso in cui ci siano problemi nel collegamento
dell’acceleratore (per es., parti piegate, molla di ritorno rotta) che
trasmettono un segnale di entrata acceleratore al controller anche se
l’acceleratore è rilasciato.
L’HPD richiede che il controller riceva un’entrata KSI ed un’entrata
interblocco (HPD Tipo 1)—o semplicemente un’entrata KSI (HPD Tipo
2)—prima di ricevere un’entrata acceleratore superiore al 25%. Se le
entrate non vengono ricevute nella sequenza corretta, il controller impedirà
l’uscita al motore. Un guasto HPD può essere cancellato riducendo la
richiesta acceleratore a meno del 25%.
La rilevazione di un errore HPD può essere spenta impostando il
Tipo HPD su “0”. Per soddisfare i requisiti CEE, l’HPD deve essere
programmato sul Tipo 1 o sul Tipo 2.
Nota: Le condizioni per gli errori HPD non sono influenzate dal fatto
che il parametro di “main contactor interlock” sia su “On” o su “Off”.
MAPPA ACCELER.
USCITA CONTROLLER (percentuale PWM)
Fig. 17 Mappatura
acceleratore per
controller con velocità
massima e velocità
micrometrica regolate
rispettivamente a
100% e a 0.
ANTI-TIEDOWN
PARAMETRI VELOCITA’
Creep Speed
Max Speed
ENTRATA ACCELERATORE (percentuale corsa utile)
Manuale
Curtis
1243 GEN 2
Nessuna rilevazione di errore HPD
HPD di Tipo 1:
KSI+interblocco
Per avviare il veicolo, il controller deve ricevere sia un’entrata KSI che
un’entrata interblocco prima di ricevere un’entrata acceleratore superiore
al 25%. Qualunque altra sequenza risulterà in un errore HPD che
impedirà al veicolo di essere azionato.
Con l’HPD di Tipo 1, il parametro di ritardo sequenziale può essere
usato per evitare errori HPD, che altrimenti accadrebbero dall’apertura
momentanea dell’interruttore interblocco durante l’azionamento (vedi la
Fig. 14, pagina 29). Se l’interruttore interblocco viene aperto e quindi
chiuso velocemente prima che il ritardo sequenziale programmato sia
terminato, non verrà dichiarato nessun errore HPD ed il funzionamento
non sarà interrotto.
Cambiando uno qualunque dei parametri della velocità si alterano
le caratteristiche dell’uscita del controller relative all’entrata
dell’acceleratore, e quindi la risposta dell’acceleratore stesso. L’uscita
del controller è sempre una percentuale definita dai parametri della
velocità (il valore tra la velocità micrometrica e le impostazioni della
velocità massima). Ciò significa che l’uscita del controller inizia ad
aumentare al di sopra della velocità micrometrica impostata non appena
l’acceleratore supera il normale valore neutro (“deadband”). L’uscita del
controller continua ad aumentare con l’aumento dell’entrata
dell’acceleratore, e raggiunge la massima uscita quando l’entrata
dell’acceleratore raggiunge la soglia massima. A questo punto l’uscita
massima del controller è definita dal valore del parametro di velocità
massima.
36
HPD di Tipo 0:
HPD di Tipo 2:
solo KSI
Per avviare il veicolo, il controller deve ricevere un’entrata KSI prima di
ricevere un’entrata acceleratore superiore al 25%. Una violazione di
questa sequenza risulterà in un errore HPD, che impedirà al veicolo di
essere azionato. Con l’HPD di Tipo 2, se l’acceleratore viene impiegato
Manuale
Curtis
1243 GEN 2
41
3 — PARAMETRI PROGRAMMABILI: Parametri acceleratore
3 — PARAMETRI PROGRAMMABILI: Parametri contattore principale
CHECK
Il parametro di “field check” determina se la diagnostica del campo è attiva.
Quando programmato su “On”, il controller verifica gli errori aperti di campo
e di cortocircuito. Questo parametro viene generalmente programmato
su “On” tranne che nelle applicazioni di un motore ad eccitazione in serie,
o dove la resistenza del motore è troppo elevata per fornire dati fondati
sugli errori.
Parametri contattore principale
MAIN CONT INTR
Il parametro di “main contactor interlock” permette al costruttore di
utilizzare una sequenza di doppio switch per azionare il veicolo. Quando
questo parametro è programmato su “On”, il controller richiede che sia
l’entrata KSI (Pin 16) che l’entrata interblocco (Pin 15) diano un segnale
positivo (a B+) prima che il controller attivi il contattore principale.
Quest’ultimo si apre dopo che l’interruttore interblocco è stato aperto ed
il ritardo sequenziale è terminato. Se questo parametro è programmato
su “Off”, viene richiesta solo l’entrata KSI per attivare il contattore
principale.
Dopo aver cambiato l’impostazione interblocco del contattore
principale, il KSI deve essere sottoposto ad operazioni cicliche affinchè
la nuova impostazione abbia effetto.
Un aumento del valore della velocità micrometrica sposta in alto le
curve. Come viene mostrato in Fig. 18, un’impostazione della velocità
micrometrica al 10% con il “throttle map” fissato al 50% fornisce un’uscita
PWM del 60% (50% + 10%) a metà acceleratore.
Mappatura
acceleratore per
controller con velocità
massima e velocità
micrometrica regolate
rispettivamente a
100% e 10%.
Fig. 18
MAPPA ACCEL.
USCITA CONTROLLER (percentuale PWM)
FIELD
PARAMETRI VELOCITA’
Creep Speed
Max Speed
ENTRATA ACCELERATORE (percentuale corsa utile)
MAIN OPEN DLY
Una riduzione dell’impostazione della velocità massima taglia la
parte superiore della mappa dell’acceleratore. La Fig. 19 mostra le
curve della mappa dell’acceleratore con la stessa taratura della “creep
speed” al 10% e la taratura della velocità massima scesa al 90%. Le
curve in questo esempio sono esattamente come nella Fig. 18, tranne
che per l’uscita PWM che tocca il limite massimo al 90%.
Mappatura
acceleratore per
controller con velocità
massima e velocità
micrometrica regolate
rispettivamente a 90%
e a 10%.
Fig. 19
CONT DIAG
Il parametro di “main contactor diagnostics”, se programmato su “On”,
abilita due controlli a verificare che il contattore principale sia presente
e che non sia chiuso tramite saldatura. Ogni volta che viene ordinato al
contattore principale di innestarsi, il controller per prima cosa verifica
che il contattore principale non sia già stato chiuso. Quindi il controller
innesta il contattore e verifica che sia installato correttamente.
Questi controlli non vengono svolti se il parametro di “main contactor
diagnostics” è programmato su “Off”. Il driver del contattore principale,
comunque, è sempre protetto da sovracorrenti, cortocircuiti, e
surriscaldamento.
40
Manuale
Curtis
1243 GEN 2
MAPPA ACCEL.
USCITA CONTROLLER (percentuale PWM)
Il parametro di “main contactor open delay” è applicabile solo se il driver
interblocco del contattore principale è stato programmato su “On”. Il
ritardo può allora essere impostato per permettere al contattore di
restare attivo per un certo periodo di tempo dopo che l’interruttore
interblocco è stato aperto. Il ritardo è utile per evitare operazioni cicliche
del contattore non necessarie e per garantire energia alle funzioni
ausiliarie, come al motore pompa sterzo, che possono essere usate per
un breve periodo di tempo dopo che l’interruttore interblocco si è aperto.
Questo parametro è programmabile da 0 a 40 secondi.
Dopo che l’interruttore interblocco è stato aperto, il ritardo
sequenziale programmato deve terminare prima che il timer del “main
contactor open delay” inizi a conteggiare. Quindi, il tempo compreso tra
l’apertura dell’interruttore interblocco e la disattivazione del contattore
principale risulta dalla somma del ritardo sequenziale e del ritardo del
contattore principale (vedi Fig. 14, pagina 29.)
PARAMETRI VELOCITA’
Creep Speed
Max Speed
ENTRATA ACCELERATORE (percentuale corsa utile)
La mappa acceleratore viene regolata come parte del processo di
regolazione della prestazione del veicolo (Sezione 5).
Manuale
Curtis
1243 GEN 2
37
3 — PARAMETRI PROGRAMMABILI: Parametri campo
3 — PARAMETRI PROGRAMMABILI: Parametri campo
POT LOW FAULT
FIELD MAP
Il parametro di “pot low fault” permette di disattivare il rilevamento
dell’errore “pot low” del controller. Ciò è utile quando vengono usate
entrate acceleratore unipolari, a voltaggio con messa a terra (B-).
Regolando questo parametro su “Off” si mette fuori servizio la rilevazione
degli errori all’entrata “pot low” (Pin 7). Si raccomanda di impostare il
parametro su “On” in ogni applicazione in cui venga usato un acceleratore
resistivo. Ciò fornirà la massima efficienza nel rilevamento di errori
dell’acceleratore e garantirà un funzionamento del veicolo il più sicuro
possibile.
Nota: Il nome sul display del programmatore per il guasto del “pot
low” è “Throttle Wiper Lo.”
Parametri campo
Il parametro di “field map” definisce il rapporto tra la corrente dell’armatura
e la corrente di campo in condizioni di guida stazonarie. La forma della
mappa di campo è determinata dalle impostazioni programmate dei
parametri di “Field Min”, “Field Max”, “Field Map”, “Field Map Start”, e
“M1-M4 Drive C/L”.
Come viene mostrato nella Fig. 20, questo parametro regola la
corrente di campo ad un punto intermedio della mappa di campo, situato
tra il “Field Map Start” e la “M1-M4 Drive C/L” programmata. Con il
parametro impostato al 50%, la corrente di campo del motore aumenta
in maniera lineare con corrente di armatura crescente — emulando così
un motore ad eccitazione in serie.
Corrente di
campo relativa alla
corrente dell’armatura,
con parametro di “field
map” regolato a 50%
e 20%.
Fig. 20
Il parametro “minimum field current limit” definisce la minima corrente di
campo consentita, determinando così la velocità massima del veicolo.
Il parametro di “field min” può essere regolato da 1.6 amp. fino al minimo
“Restraint value M1–M4” programmato.
Questo parametro viene regolato come parte del processo di
regolazione della prestazione del veicolo (Sezione 5).
Campo Max.
CORRENTE DI CAMPO
FIELD MIN
Mappa di
campo (50%)
Campo Min.
FIELD MAX
Field Map
Start
Il parametro “maximum field current limit” definisce la massima corrente
di campo consentita. L’impostazione del limite massimo della corrente
di campo determina la coppia massima del veicolo e limita la dissipazione
della potenza nell’avvolgimento di campo. Questo parametro può essere
regolato dal valore minimo del campo programmato fino alla massima
corrente di campo del controller. (La massima corrente di campo
dipende dal modello del controller; vedi le caratteristiche nella Tabella
D-1).
Il parametro di “maximum current limit” viene regolato come parte
del processo di regolazione della prestazione del veicolo (Sezione 5).
Field Map
Midpoint
100% Drive C/L
CORRENTE ARMATURA
CORRENTE DI CAMPO
Campo Max.
Mappa di
campo (20%)
Campo Min.
FLD MAP START
Il parametro di “field map start” definisce la corrente dell’armatura alla
quale la mappatura del campo inizia ad aumentare al di sopra del valore
minimo di campo programmato. Questo parametro è regolabile da 25
amp. fino al valore massimo tarato della corrente dell’armatura. (La
massima corrente dell’armatura dipende dal modello del controller; vedi
le caratteristiche nella Tabella D-1).
Il parametro di “field map start” viene usato per pareggiare la
velocità massima del veicolo carico e scarico. Un aumento del valore
di questo parametro farà aumentare il peso massimo del carico che il
veicolo può portare mantenendo la velocità massima su una superficie
piana.
Field Map
Start
Manuale
Curtis
1243 GEN 2
100% Drive C/L
Una riduzione del parametro di “field map” riduce la corrente di
campo ad una corrente di armatura stabilita. Riducendo la corrente di
campo, il motore sarà in grado di mantenere le velocità più vicine al
valore di velocità massima quando il suo carico aumenta; tuttavia, a
queste velocità più elevate, diminuirà la capacità del motore di produrre
una coppia. Con il “Field Map” ridotto al 20%, la corrente di campo al
punto medio della mappa di campo supererà il “Field Min” del 20% della
gamma compresa tra il “Field Min” ed il “Field Max”.
Il parametro di “field map” viene regolato come parte del processo
di regolazione della prestazione del veicolo (Sezione 5).
Il parametro di “field map start” viene regolato come parte del
processo di regolazione della prestazione del veicolo (Sezione 5).
38
Field Map
Midpoint
CORRENTE ARMATURA
Manuale
Curtis
1243 GEN 2
39