Amplificatori
Sample and Hold
(Appunti forniti dal prof. Pasquale Daponte)
INDICE
1. PRINCIPI OPERATIVI DI UN SAMPLE AND HOLD (SHA) AMPLIFER IDEALE ................ 2
2. PRINCIPALI PARAMETRI CHE CARATTERIZZANO LE PRESTAZIONI DI UN SHA REALE. 5
2.1 Modo track........................................................................................................... 6
2.2 Transizione track a hold ..................................................................................... 7
2.3 Modo hold.......................................................................................................... 11
2.4 Transizione hold-to-sample............................................................................... 13
2.5 Modo sample...................................................................................................... 17
3. ALCUNE STRUTTURE CIRCUITALI CHE PERMETTONO DI REALIZZARE UN SHA. ....... 18
3.1 Configurazione in cascata ................................................................................ 19
3.2 Configurazione in retroazione .......................................................................... 20
3.3 SHA con integratore.......................................................................................... 22
3.4 TRANSIZIONE SAMPLE→HOLD (S→H).................................................... 24
4. APPLICAZIONI .......................................................................................................... 24
5. SHA SELETTIVI E USATI ........................................................................................... 27
1
AMPLIFICATORI SAMPLE AND HOLD
1. Principi operativi di un Sample and Hold (SHA) Amplifer ideale
Per eseguire correttamente una conversione analogica/numerica (A/D) la tensione
all’ingresso (Vx) del convertitore analogico/numerico (ADC) deve rimanere costante per
tutta la durata TADC della conversione stessa. Affinché si verifichi ciò è necessario :
Fmax << 1/ TADC
(1.1)
con Fmax corrispondente alla massima frequenza presente nel segnale analogico da
acquisire.
In tal caso il segnale può essere ritenuto con buona approssimazione costante durante
l’intera durata della conversione.
Se la 1.1 non è soddisfatta si deve impiegare un circuito che campioni la Vx in istanti di
tempo prefissati e mantenga il valore campionato per tutto il tempo necessario affinché
l’ADC posto a valle di esso esegua la conversione.
Tale circuito prende il nome di amplificatore Sample and Hold (SHA), letteralmente
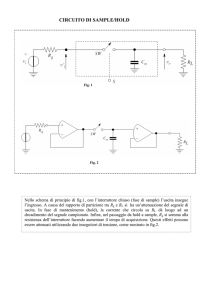
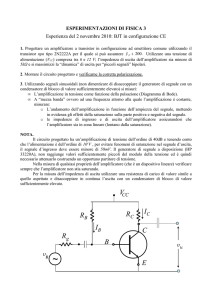
“campionatore a tratti”. Il corrispondente schema a blocchi è illustrato in Fig.1a.
Un SHA ideale presenta due modi di funzionamento: il modo sample (livello logico 1) e
il modo hold (livello logico 0). Applicando dall’esterno un segnale binario all’ingresso
di controllo si può comandare la transizione da un modo di funzionamento all’altro.
In Fig. 1b sono riportati il segnale di ingresso (Vx) e quello di uscita (Vy) di un SHA
ideale. Nella fig. 1c è invece riportato il corrispondente ingresso di controllo (VC).
Durante il modo sample la tensione di uscita Vy
riproduce esattamente quella di
ingresso Vx, di solito con guadagno unitario. Nel modo hold, invece, l’uscita mantiene
il valore che aveva all’istante in cui è avvenuta la transizione dal modo sample a quello
hold ; questo valore è mantenuto finché non viene dato un successivo comando di
sample. È durante l’intervallo di hold che l’ADC posto in cascata al SHA esegue la
conversione.
2
Fig. 1. Schema di principio di un SHA (a); confronto tra i segnali applicati all’ingresso
e all’uscita in un SHA ideale (b) ; andamento temporale del corrispondente segnale
binario di controllo (c).
Più precisamente il circuito campionatore viene detto sample-and-hold se è costruito in
modo tale che l’intervallo di sample sia una piccola frazione di quello di hold; quando si
verifica la condizione opposta, invece, il circuito prende il nome di track-and-hold
(THA).
Spesso, comunque, viene utilizzato il nome generico di SHA per indicare entrambi
questi circuiti.
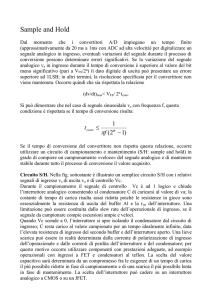
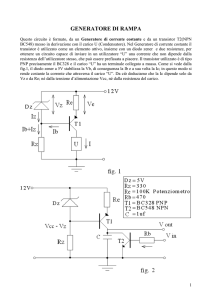
Le due diverse modalità di funzionamento sono poste in evidenza in Fig.2.
Fig.2. Modalità di funzionamento di un track-and-hold e un sample-and-hold.
3
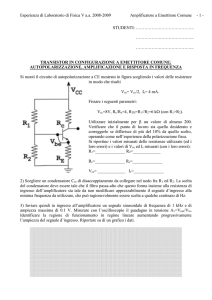
I componenti fondamentali di un SHA sono schematizzati in Fig.3. Da un punto di vista
di principio, infatti, un SHA è costituito da un interruttore comandato e da un
condensatore, il quale memorizza il valore assunto dal segnale di ingresso all’istante in
cui l’interruttore I viene aperto (istante di campionamento).
La capacità Ch svolge quindi la funzione di memoria temporanea (hold) della tensione
da convertire.
In un track-and-hold l’interruttore I è normalmente chiuso, mentre in un sample-andhold è chiuso solamente durante il breve intervallo di tempo necessario ad acquisire il
segnale di ingresso.
Fig. 3. Componenti fondamentali di un SHA.
4
2. Principali parametri che caratterizzano le prestazioni di un SHA reale
Tutti i dispositivi SHA hanno quattro componenti principali: l’amplificatore di ingresso,
il dispositivo a immagazzinamento di energia (condensatore per la fase hold), il buffer
di uscita, i circuiti di interruzione (switch) (Fig. 4).
Fig.4. Struttura di base di un amplificatore sample-and-hold.
Il dispositivo a immagazzinamento di energia (il cuore di un SHA) è quasi sempre un
condensatore. L’amplificatore
di ingresso memorizza l’ingresso presentando una
elevata impedenza alla sorgente di segnale e fornendo un guadagno di corrente per
caricare il condensatore di hold..
Nel modo track, il condensatore di hold di solito determina la risposta in frequenza del
dispositivo; nel modo hold il condensatore conserva la tensione esistente prima che sia
disconnesso dal buffer di ingresso. Il buffer di uscita offre un elevata impedenza al
condensatore di hold per conservare la tensione determinata dalla scarica
prematuramente. Il circuito di interruzione e il suo driver costituiscono il meccanismo
attraverso cui il condensatore di hold è alternativamente posto dalla fase di sample alla
fase di hold.
Il termine sample and hold implica che il dispositivo campioni l’ingresso per un breve
periodo e stia in modo hold per la durata del ciclo di lavoro.
Un track and hold trascorre la maggior parte del tempo seguendo l’ingresso ed è posto
in modo hold solo per un breve intervallo.
5
Nei sistemi di acquisizione dati che operano a velocità elevate(superiori a 1MHz) i
termini
sample and hold e track and hold perdono la loro distinzione.
Per descrivere metrologicamente il comportamento di un SHA reale è necessario fornire
le caratteristiche statiche e dinamiche per ciascuno dei due modi di funzionamento e per
le transizioni da un modo all’altro. Saranno ora presi in esame i principali parametri che
consentono tale descrizione.
2.1 Modo track
Poiché in questo caso il SHA è semplicemente un amplificatore ad ampiezza di banda
limitata che può o non può fornire guadagno, le sue caratteristiche sono le stesse di un
amplificatore analogico.
Si ricorda che un SHA può essere rappresentato con un amplificatore operazionale con
un condensatore e un interruttore.
Le principali specifiche usate per descrivere l’operazione in modo sample sono:
Offset: per segnale di ingresso nullo , esso rappresenta l’estensione di cui l’uscita devia
dallo zero, nel tempo ed al variare della temperatura;
Non linearità: la quantità di cui il grafico dell’uscita in funzione dell’ingresso devia
dalla ‘linea retta ottimale’. Di solito è specificato come percentuale del fondo scala del
SHA;
Tempo di assestamento: il tempo richiesto affinché l’uscita si assesti al suo valore
finale entro la banda di errore ossia entro una frazione fissata del fondo scala quando è
applicato un gradino analogico in ingresso (da 0 a ±FS, -FS a +FS, o da +FS a –FS);
Guadagno: il fattore di moltiplicazione rappresentante la funzione di trasferimento
ingresso/uscita in continua;
Ampiezza di banda: descrive la risposta in frequenza in termini di attenuazione
dell’uscita, di solito è caratterizzato dal valore a 3dB;
Velocità di deviazione: la massima velocità di cambiamento della tensione di uscita
quando è applicato un gradino analogico sia come gradino iniziale che come una
transizione hold a sample;
6
2.2 Transizione track a hold
I principali parametri forniti per descrivere le prestazioni del SHA durante questa fase di
transizione sono:
Tempo di apertura: rappresenta l’intervallo di tempo tra l’istante in cui viene fornito
all’ingresso di controllo il comando di hold e l’istante in cui avviene l’effettiva apertura
dell’interruttore, come illustrato in Fig. 5.
Figura 5. Specifiche durante la fase di transizione S→H
In realtà, per circuiti aventi la stessa sigla commerciale, il tempo di apertura varia al
variare dello specifico dispositivo considerato. Per un dato dispositivo, inoltre, esso
varia da un’operazione di campionamento all’altra: quest’ultima fluttuazione aleatoria
dell’istante di campionamento prende il nome di Jitter di apertura Tj (aperture Jitter).
L’effettivo tempo di apertura Tap è dato pertanto dalla somma del ritardo normale di
apertura Tap e dell’incertezza ∆Tap sull’effettivo istante di apertura dell’interruttore,
dovuta sia allo specifico componente, sia al Jitter temporale. Si ha cioè:
Tap = Tap + ∆ Tap
Il ritardo Tap tra l’effettivo istante di campionamento e l’istante di comando può quindi
essere in parte compensato anticipando il segnale di comando dal valore nominale Tap,
rispetto all’istante in cui si desidera campionare il segnale. Nelle applicazioni in cui non
interessa la relazione temporale tra il segnale di ingresso e gli istanti di campionamento,
ma solamente la costanza dell’intervallo di tempo tra questi ultimi, il ritardo nominale
7
Tp e la componente dell’incertezza di apertura dovuta allo specifico componente,
essendo costanti, perdono interesse.
Ciò accade quando si desidera stimare l’autocorrelazione o lo spettro (di ampiezza) di
un segnale.
Esempio:
Supposto che il segnale da campionare presenti una variazione massima pari a 1 V/µs, e
che il SHA abbia una incertezza di apertura inferiore a ±10 ns, l’incertezza sul valore
campionato è inferiore a ±1 V/µs ⋅ 10 ns = 10 mV. Se il valore della tensione di fondo
scala è pari 5 V, l’accuratezza del SHA è pertanto superiore allo 0.2%.
Offset da sample a hold (Pedestal): c’è un errore di gradino che fa si’ che il valore
ottenuto sia differente dall’ultimo valore nel campione ; esso è causato dalla carica
scaricata sul condensatore hold attraverso una capacità di dispersione dal circuito
switch- control.
L’obiettivo del progetto è gestire l’errore dovuto ad un switch non ideale indipendente
dal livello del segnale di ingresso; la misura di cui devia da una costante in tutto il
range del segnale di ingresso può risultare in non linearità nell’uscita rispetto al segnale
di ingresso.
La porzione costante d’offset dell’errore chiamata trasferimento di carica (passo
d’offset) può essere compensata accoppiando un segnale di fase opposta sul
condensatore hold attraverso un circuito switching ausiliare e un condensatore di
compensazione.
Così il sample to hold (Pedestal), dipendono dalla configurazione del dispositivo reale.
Per SHA aventi condensatori hold interni fissi esso include il gradino residuo incorretto
e la nonlinearità offset.
Per i circuiti SHA integrati, richiedenti condensatori esterni, il pedestal è l’errore di
gradino residuo dopo che è stato influenzato il trasferimento di carica per essere
cancellato.
.In un dispositivo in cui il condensatore può essere scelto dall’utente questi effetti
possono essere ridotti aumentando in proporzione la capacità. Tutto ciò, però, si
ottiene al prezzo dell’aumento del tempo di acquisizione.
8
Tempo di assestamento (setting time Ts) , ossia il tempo richiesto, dall’istante di
apertura dell’interruttore, affinché l’uscita raggiunga il valore finale entro una frazione
specifica del fondo scala;
Ritardo di apertura (o più precisamente Tempo effettivo di ritardo dell’apertura ):
questa caratteristica è importante perché aiuta l’utente SHA a sapere quando bloccare il
dispositivo rispetto alla sincronizzazione del segnale di ingresso. La Fig. 6 mostra la
sequenza di ciò che accade quando il comando hold è applicato con un segnale di
ingresso di pendenza arbitraria (per semplicità l’errore di offset SHA ed il transitorio di
apertura dell’interruttore sono stati ignorati).
Il valore che infine si ottiene è una versione ritardata del segnale di ingresso, mediata
sul tempo di apertura dell’interruttore.
L’effettivo tempo di ritardo di apertura è definito come l’intervallo tra il fronte di salita
del comando di hold e l’istante in cui il segnale di input è uguale al valore calcolato.
Questa caratteristica è più utile del tempo di apertura stesso, perché include gli effetti
del ritardo di propagazione digitale e analogico, così come il tempo di apertura.
Fig. 6. Errori introdotti dal SHA in fase di apertura
La formula in Fig. 6 è basata sull’ipotesi che il valore di tensione ai capi del
condensatore di hold è approssimativamente uguale al valore medio del segnale
applicato ai capi dello switch nell’intervallo durante il quale lo switch cambia da una
bassa ad un’alta impedenza (tempo di apertura);
9
Jitter (incertezza di apertura): è il risultato del rumore che modula la fase del
comando hold.
Il Jitter si manifesta come variazione campione-campione nel valore del segnale
analogico che è stato ‘congelato’ .
In un SHA è la variazione del tempo nell’apertura dell’interruttore di campionamento.
Inoltre è la variazione nel tempo di ritardo di apertura da campione a campione.
L’incertezza d’apertura si manifesta con un errore di apertura come mostrato in Fig.7.
L’ampiezza dell’errore è correlata alla velocità di cambio dell’ingresso analogico. Per
ogni assegnato valore dell’incertezza di apertura, l’errore di apertura aumenterà come
l’ingresso aumenta la derivata del segnale in ingresso al SHA;
Switching Transient: come mostrato in Fig.7 la maggior parte delle caratteristiche di
un SHA include l’ampiezza massima e la durata del transitorio che appare all’uscita
come risultato della transizione sample-to-hold.
Un transitorio simile appare anche durante la transizione hold-to-sample, ma è di solito
non rilevante, a causa dell’effetto dominante del tempo di acquisizione.
Switch Delay Time (tempo di ritardo dello switch): l’intervallo tra i fronti del
comando hold e l’inizio del cambiamento dello stato all’uscita analogica del SHA.
Questo ritardo come mostrato in Fig.7 avviene per entrambe le transizioni sample-tohold e hold-to-sample.
Fig.7. Incertezza nell’istante di apertura.
10
2.3 Modo hold
Durante il modo hold la tensione di uscita dovrebbe essere costante. Lo scostamento da
tale situazione ideale è dovuto essenzialmente a due fenomeni: il feedthrough e il droop,
entrambi evidenziati in fig. 8.
Fig 8 Feedthrough e droop durante il modo hold
Droop (abbassamento) La rapidità di variazione (droop rate DR) della tensione di
uscita è legata al fatto che il condensatore di hold non è chiuso su una resistenza infinita
e, quindi, si scarica, sia pure lentamente. Tale resistenza è dovuta alle correnti di
dispersione attraverso l’interruttore a FET e alla corrente di bias dell’amplificatore di
uscita. La polarità del droop dipende dal verso delle correnti di dispersione; comunque,
se il SHA è ben progettato, ha influenza rilevante solamente la corrente attraverso
l’interruttore. Poiché per una data corrente di dispersione Id attraverso il condensatore si
ha un droop rate pari a:
dVy/dt = Id/ Ch
ne consegue che la variazione della tensione in uscita dal SHA può essere ridotta
adottando elevati valori di capacità: un elevato valore di Ch limita però la velocità di
carica del condensatore durante il modo sample. In pratica, pertanto, il valore di Ch è
fissato dal costruttore in modo da ottimizzare le prestazioni del SHA in date condizioni
di funzionamento. In alcuni SHA, comunque, il costruttore lascia all’utilizzatore la
libertà di scegliere il valore più opportuno della capacità; in questi casi, nelle specifiche
11
il droop rate è definito mediante la corrente di dispersione Id anziché mediante il valore
di dVy/dt. Ad esempio si supponga che il SHA in esame abbia una corrente di
dispersione pari a 10 pA a 20°C; se si desidera ottenere un droop rate massimo di 5
mV/S, si deve scegliere Ch =[Id/(dVy/dt)]≥2nF
Feedthrough: Il feedthrough (FT) è la frazione del segnale di ingresso che appare in
uscita quando l’interruttore è aperto. Esso è dovuto essenzialmente alla capacità
parassita che esiste tra i due terminali dell’interruttore aperto, di solito realizzato con
transistor a effetto di campo (FET) aventi il gate collegato all’ingresso di controllo.
Vengono spesso forniti valori di relazione di feedthrough a varie frequenze; questi
valori sono ottenuti applicando all’ingresso un’onda sinusoidale a una data frequenza e
di ampiezza pari al fondo scala. Si possono ad esempio avere relazioni pari a –90db a
basse frequenze e a –60dB ad alte frequenze (MHz).
Assorbimento dielettrico: la tendenza delle cariche entro un condensatore a
ridistribuirsi in un periodo di tempo, risultante in un salto (“creep”) ad un nuovo livello
quando è permesso riposarsi dopo cambiamenti larghi e veloci..
12
2.4 Transizione hold-to-sample
Per descrivere le prestazione del SHA durante questa fase di transizione viene utilizzato
un unico parametro:
-
il tempo di acquisizione Tacq è definito come l’intervallo di tempo tra l’istante in cui
l’ingresso di controllo passa da Hold a Sample e l’istante in cui l’uscita raggiunge
una frazione specifica del segnale di ingresso (Fig. 9); il caso peggiore si manifesta
quando il segnale di ingresso consiste in un gradino di ampiezza pari al fondo scala.
Fig. 9 Tempo di acquisizione.
Il tempo di acquisizione rappresenta pertanto un limite inferiore al tempo in cui il
segnale di ingresso deve essere applicato al SHA affinché il valore ottenuto in uscita
abbia una prefissata accuratezza. Esso è dovuto essenzialmente a tre cause:
-
il ritardo nella chiusura dell’interruttore (Ti);
-
il ritardo legato allo slow-rate degli amplificatori e alla velocità di carica del
condensatore (Tq) di hold, il quale dipende dalla variazione della tensione di uscita;
-
il tempo di assestamento (ts) che dipende anch’esso dalla variazione della tensione
di uscita.
13
Se Rs è la resistenza vista dal condensatore di hold quando l’interruttore è chiuso, la
tensione Vy ai capi di tale condensatore quando la tensione d’ingresso varia a gradino è
data da:
Vy(t)=V∞ - ∆V exp(-t / Rs Ch)
Dove V∞ rappresenta il valore a regime e ∆V è l’ampiezza del gradino. Il tempo
richiesto per caricare il condensatore alla tensione (1-p)V∞ è pertanto pari a:
Tq= -RsCh * Ln( p * abs(V∞/∆V) )
In particolare se si suppone che il condensatore sia inizialmente scarico si ha ∆V= -V∞,
per cui si ottiene :
Tq = - Rs Ch * Ln( p)
Che fornisce
4.6 Rs Ch p=1%
Tq =
6.9 Rs Ch p=0.1%
Si definisce efficienza η di un SHA il rapporto fra la tensione ai capi di Ch all’istante di
apertura dell’interruttore I e la tensione di ingresso, ossia:
η = 1-p = 1-exp (-Tq / Rs Ch)
14
Per aumentare η si deve ridurre la costante di tempo di carica RsCh, o aumentere il
tempo Tq di chiusura dell’interruttore. Si noti però che, una volta minimizzato il valore
di Rs, la prima soluzione richiede una riduzione di Ch, la quale comporta un aumento del
droop rate durante la fase di hold. La seconda soluzione invece richiedendo un aumento
della durata della fase di sample, comporta una riduzione del segnale di ingresso.
In prima approssimazione si può supporre che, fissata l’accuratezza p con cui il valore
finale deve essere acquisito, anche il tempo di acquisizione Tacq sia proporzionale a
RsCh:
Tacq= Kacq Rs Ch
Una rozza figura di merito per un SHA e pertanto data dal prodotto:
ß ≅ droop * Tacq = (Id/ Ch) Kacq Rs Ch = Kacq RsId
Si ricorda infine che, durante le transizioni possono apparire dei fenomeni transitori
causati da squilibri dinamici all’interno del SHA o da accoppiamenti capacitivi con il
segnale di controllo. In Fig.10 sono riportate le principali caratteristiche dinamiche di
un SHA.
Figura10. Caratteristiche dinamiche di un SHA
15
La massima velocità di campionamento di un SHA è limitata dalla somma di un
intervallo di tempo richiesta per il modo Sample and Hold. L’intervallo trascorso nel
modo hold (dopo che il transitorio si è stabilizzato) è soprattutto determinato dal sistema
in cui un SHA è usato. Il tempo minimo trascorso nel modo sample comunque è
determinato dal tempo di acquisizione sample-hold per un dato grado di accuratezza.
Quando il tempo di acquisizione è misurato come l’intervallo dalla transizione holdsample all’istante in cui il buffer di uscita si è stabilizzato, il valore risultante del tempo
di acquisizione è generalmente pessimistico. Come definito il tempo di acquisizione
misura il tempo richiesto per acquisire il segnale al condensatore di hold non
necessariamente all’uscita del buffer (nonostante essi siano gli stessi). Per i dispositivi
in cui il condensatore di hold è memorizzato da un inseguitore, piuttosto che usato come
un integratore, la misura dell’uscita include il buffer di uscita (fissato il tempo così
come il tempo di ritardo dello switch). In pratica la tensione è stata già fissata dal
condensatore hold, ed un comando hold può essere applicato prima che il buffer di
uscita si sia stabilizzato completamente. La Fig 11 illustra
un metodo per la
determinazione del tempo di acquisizione che è indipendente dagli effetti del buffer di
uscita. L’onda quadra analogica in ingresso è campionata e convertita ad una frequenza
doppia dell’onda quadra analogica con impulsi sample strettamente vicini. Per una
transizione a Sample la figura indica che l’uscita incomincia a cambiare in modo da
seguire il gradino iniziale.
Inizialmente (fissata l’ampiezza sufficiente per acquisire il segnale accuratamente)
l’ampiezza dell’impulso taq è ridotta fino a che il segnale di uscita, misurato
digitalmente, cominci a collassare per qualche percentuale definita del fondo scala.
Quando ciò accade l’ampiezza dell’impulso è uguale al tempo di acquisizione, perché il
condensatore hold di non può acquisire più a lungo il segnale in maniera accurata con
un ulteriore riduzione di taq .
Fig. 11. Determinazione del tempo di acquisizione
16
2.5 Modo sample
Durante la fase di campionamento, una volta terminato il transitorio, il SHA è
semplicemente un amplificatore inseguitore, la cui caratteristica di trasferimento
dovrebbe essere una retta passante per l’origine e pendenza unitaria. Per indicare gli
scostamenti dalla idealità vengono fornite le seguenti specifiche di tipo statico, che
sono riportate in fig.12(a):
-
la tensione di offset in uscita, ossia la tensione con ingresso nullo e la sua
dipendenza dal tempo e dalla temperatura;
-
la non linearità della caratteristica di trasferimento statica, di solito fornita mediante
il massimo scostamento tra la retta che “meglio” approssima tale caratteristica e la
caratteristica stessa;
-
lo scostamento di guadagno, ossia il valore del coefficiente angolare della retta
approssimante la caratteristica di trasferimento.
Tali caratteristiche sono dovute a imperfezioni dell’interruttore e degli amplificatori di
ingresso e uscita; per la loro compensazione sono talvolta previsti adeguati circuiti.
Figura 12. Specifiche statiche di un SHA durante la fase sample.
Vengono inoltre fornite le caratteristiche di tipo dinamico tipiche degli amplificatori
inseguitori, come ad esempio:
-
la banda passante sia per piccoli segnali, sia per grandi segnali. Infatti, se Rs
rappresenta la resistenza vista dal condensatore di hold quando l’interruttore I è
chiuso, nella fase di sample la cella Rs Ch funziona da filtro passa basso, limitando
17
in tal modo la frequenza massima della tensione di ingresso. D’altra parte, poiché
per garantire la costanza della tensione di uscita durante la fase di hold non è
possibile ridurre a valori troppo bassi la capacità Ch, per aumentare la frequenza di
taglio di tale filtro è necessario che Rs assuma valori ridotti;
-
il ritardo di fase (phase shift), ossia lo sfasamento tra la tensione di uscita e quello di
ingresso;
-
lo slow-rate (SR), ossia la massima rapidità di variazioni dell’ uscita;
-
il tempo di assestamento (setting time Ts), ossia il tempo richiesto affinché l’uscita
raggiunga una frazione specificata dal valore di regime quando all’ingresso è
applicato un gradino di tensione di ampiezza specificata, come mostrato in fig. 12
(b).
3. Alcune strutture circuitali che permettono di realizzare un SHA.
I circuiti SHA possono essere a ciclo chiuso o aperto. I primi utilizzano l’accuratezza,
bassa deriva, e flessibilità di guadagno adatti all’amplificatore operazionale. I secondi
traggono vantaggio dalle caratteristiche di elevata velocità degli amplificatori buffer a
guadagno unitario.
Fig 13 .SHA structure-simple follower
Un SHA ideale dovrebbe riprodurre in uscita il segnale di ingresso senza incertezze,
avere tempi di transizione nulli, ed essere in grado di mantenere in uscita il valore
campionato per un tempo infinito. Poiché in pratica ciò può essere ottenuto solamente
con un certo grado di approssimazione,
è importante specificare come e di quanto il comportamento del circuito reale si scosta
da quello del circuito ideale .
18
Nella modalità sample la capacità Ch del SHA si carica attraverso la resistenza Rs della
sorgente.
Per ottenere una carica veloce del condensatore, ossia una veloce acquisizione del
segnale, la costante di tempo di carica RsCh deve essere ridotta; pertanto, sia Rs che Ch
devono risultare molto piccole.
Sempre nella fase di sample, una volta a regime, il circuito si comporta come un filtro
passa-basso con pulsazione di taglio ωo=1/(RsCh); affinché la tensione ai capi del
condensatore riproduca fedelmente la tensione di ingresso, è necessario che ωo sia
sufficientemente maggiore della banda del segnale di ingresso. Anche in questo caso si
evince che sia Rs, sia Ch devono essere molto piccole.
Al contrario, per mantenere costante la tensione ai capi del condensatore durante il
modo hold, è necessario realizzare elevate costanti di tempo di scarica. Se RL
rappresenta il parallelo fra la resistenza di carico e quella connessa a tutte le perdite del
condensatore, tale costante di tempo vale RLCh Per mantenere costante il segnale di
uscita è quindi necessari massimizzare il prodotto RLCh; ciò richiede l’impiego di
elevare resistenze di carico e di condensatori di elevata capacità. Si noti, in particolare,
che la condizione sul valore della capacità è opposta a quella richiesta nella fase di
sample. Gli schemi circuitali impiegati per realizzare un SHA devono pertanto rendere
minima la resistenza Rs: per la capacità Ch si adotta invece una soluzione di
compromesso scelta in base alle prestazioni desiderate. La struttura del circuito varia
inoltre a seconda che il principale obiettivo da raggiungere sia la velocità oppure
l’accuratezza o infine una soluzione di compromesso.
3.1 Configurazione in cascata
L’ingresso e l’uscita sono isolati dall’interruttore e dalla capacità di memoria mediante
due inseguitori di tensione, spesso aventi lo stadio di ingresso a FET, come mostrato in
Fig.14.
19
Fig 14. Configurazione in cascata
L’amplificatore di ingresso consente di ridurre la resistenza Rs vista dal condensatore
quando l’interruttore è chiuso; ciò è utile specialmente nei casi in cui la sorgente di
segnale ha un’impedenza elevata.
A causa delle imperfezioni degli amplificatori, questo tipo di realizzazione, pur
consentendo elevate velocità, è poco accurata.
In particolare, le tensioni di offset dei due amplificatori in cascata si sommano tra loro
causando uno scostamento sull’uscita.
3.2 Configurazione in retroazione
Quando è richiesta un’elevata precisione, sia pure a scapito della velocità, conviene
adottare uno schema a retroazione del tipo rappresentato in Fig. 15. In questo tipo di
realizzazione l’effetto sull’uscita delle tensioni di offset degli amplificatori e dei rumori
di
modo
comune
viene
notevolmente
ridotto.
Purtroppo
il
miglioramento
dell’accuratezza del dispositivo avviene a scapito di un aumento del tempo richiesto per
la carica della capacità. Durante il modo hold, l’amplificatore d’ingresso è saturato in
quanto mentre all’ingresso invertente è applicata la tensione costante presente all’uscita,
all’ingresso non invertente è applicato il segnale variabile da campionare. Durante la
fase di sample successiva l’amplificatore richiederà un certo tempo per uscire dalla
saturazione, con una conseguente riduzione della velocità del componente rispetto alla
realizzazione a catena aperta.
20
Fig.15. Configurazione in retroazione.
La saturazione può essere prevenuta impiegando il circuito di Fig. 16 che presenta oltre
all’interruttore I altri due interruttori. In questo caso se durante il modo hold viene
chiuso I1 e aperto I2 l’amplificatore d’ingresso può essere sconnesso dl circuito
prevenendo così la sua saturazione. Durante la fase di hold, pertanto, il funzionamento
di questa struttura è simile a quello del circuito di Fig. 14; nella fase di sample, invece il
circuito di Fig. 16 si comporta in modo simile a quello di fig. 15.
Fig. 16. Schema per la prevenzione della saturazione nell’amplificatore di ingresso con
l’ impiego di due interruttori
In Fig.17 è mostrato un altro circuito che consente di evitate la saturazione
dell’amplificatore di ingresso impegnando due diodi. Durante la fase di sample l’intero
circuito si comporta come un inseguitore. I due diodi non conducono in quanto la
tensione ai loro morsetti è inferiore alla tensione di soglia. Quando l’interruttore viene
aperto, uno dei due diodi è senz’altro in conduzione, pertanto la maglia di retroazione
dell’amplificatore di ingresso viene chiusa. La resistenza R è impiegata per l’imitare la
21
corrente sulla maglia di retroazione dovuta alla d.d.p. tra l’uscita e l’ingresso, che viene
vista come un carico dell’amplificatore di uscita.
Fig. 17. Prevenzione della saturazione nell’amplificatore di ingresso con l’ impiego di
due diodi.
3.3 SHA con integratore
Invece di utilizzare un condensatore collegato a massa seguito da un inseguitore di
tensione, è possibile impiegare come elemento di memorizzazione un inseguitore come
illustrato in Fig. 18. In questo caso l’interruttore lavora al potenziale di massa. Durante
la fase di sample l’intero circuito si comporta sempre come un inseguitore. Durante la
fase di hold, però, l’amplificatore di ingresso è saturo.
Fig. 18. SHA con integratore.
22
La saturazione dell’amplificatore d’ingresso del circuito di Fig. 18 può comunque
essere evitata adottando lo schema di Fig. 19. Durante la fase di sample tale circuito si
comporta come un inseguitore in cascata con un integratore e presenta una risposta in
frequenza pari a:
G(ω ) = −
1
(1 + jωRCh )
Pertanto, se la frequenza del segnale di ingresso è sufficientemente minore di 1/(2RCh)
l’intero circuito si comporta come un semplice inseguitore. Questo tipo di schema
consente di realizzare SHA molto veloci.
Fig. 19. SHA con integratore e prevenzione della saturazione nell’amplificatore di
ingresso.
23
3.4 TRANSIZIONE SAMPLE→HOLD (S→H)
-
l’offset di carica ∆Q è dovuto alla frazione di carica del componente di memoria Ch
che viene immagazzinata nelle capacità parassite Cl dell’interruttore a causa
dell’apertura di quest’ultimo. In prima approssimazione si può porre
∆Q = Vy (Cl/Ch)
4. Applicazioni
Senza dubbio il principale uso degli SHA è in testa ai convertitori analogico digitali. Il
tempo di apertura, in un sistema a conversione A/D differisce dalla caratteristica del
SHA.
In una conversione A/D, il tempo di apertura si riferisce al periodo di tempo in cui
l’ingresso analogico deve rimanere stabile in maniera tale che avvenga una conversione
accurata . E’ questo intervallo che limita l’ampiezza analogica (massimo dV/dt) del
convertitore A/D.
Lo scopo del SHA è di fatto ridurre il tempo di apertura del convertitore A/D.
Mantenendo l’ingresso analogico cambiato rapidamente per il periodo richiesto
dall’ADC, l’ampiezza di banda del sistema può essere aumentata sostanzialmente. In
aggiunta, accuratezza linearità – anche di segnali a bassa frequenza – sono migliorate.
La maggior parte dei convertitori A/D a successive approssimazioni e dei convertitori
A/D di tipo subranging richiedono un SHA per tutto ma con ampiezze analogiche più
basse. Per questo motivo alcuni convertitori sono offerti con gli SHA incorporati nel
progetto. Questo rende capace il progettista del sistema a creare una combinazione
ADC-SHA in cui la sincronizzazione è stata già ottimizzata per la migliori prestazioni.
Dall’altro lato molti convertitori A/D, tipicamente flash, offrono tempi di apertura
estremamente bassi; l’inclusione di un SHA con tali dispositivi può migliorare le
prestazioni ad alta frequenza ma può degradare quelle a bassa frequenza a causa
dell’abbassamento associato con i capacitori necessariamente più piccoli.
24
I circuiti sample-hold vengono inoltre, largamente usati nei sistemi di acquisizione dati
come mostrato in Fig.20.
Fig. 20. Schema a blocchi di un sistema di acquisizione impiegante un SHA
Il sample hold mantiene costante l’ingresso al convertitore A/D durante l’intervallo di
conversione. Intanto il multiplexer collega la sua uscita al canale da convertire. Questa
operazione può avvenire sia randomaticamente che sequenzialmente. Non appena la
conversione è terminata, il sample-hold campiona il nuovo ingresso e il ciclo si ripete.
Questo modo di operare è conosciuto come campionamento sincrono; il sample-hold
opera in sincronia con diversi elementi di sistemi.
Nel modo asincrono un largo numero di sample-hold può essere usato per acquisire e
memorizzare dati a velocità pertinenti ad ogni singolo canale . Essi sono allora o
interrogati dai multiplexers analogici, o i segnali sono convertiti in maniera asincrona
singolarmente, e allora moltiplicati digitalmente.
In una distribuzione di dati, lo 0.01% dei sample-hold è meno costoso del più ampio
numero di convertitori D/A che hanno accuratezza paragonabile. Un tipico sistema di
distribuzione dati è mostrato in Fig. 21.
Un convertitore D/A veloce ed accurato aggiorna un numero di sample-hold ad una
velocità e a un livello di accuratezza appropriato ai singoli canali.
25
Fig. 21 Schema a blocchi di un sistema di generazione di segnale con l’ausilio di SHA.
I Sample and Hold sono inoltre usati per modulare i convertitori D/A (DAC) nei sistemi
che sono sensibili alle anomalie di funzionamento dei convertitori D/A che avvengono
nei punti di transizione.
La Fig.22 mostra la tempificazione usata per evitare ia propagarsi a valle del DAC dei
suoi impulsi di commutazione (glitchs).
Poco prima di inserire i nuovi dati nel DAC l’SHA è messo nel modo hold, così che le
anomalie D/A sono separate dall’uscita. Gli SHA usati devono avere dei transitori molto
piccoli di sample to hold o hold to sample e errori pedestal, così come i tempi di
acquisizione veloci.
Fig. 22. Uso del SHA per evitare la presenza di impulsi di commutazione prodotti da
un convertitore D/A a valle del convertitore stesso.
26
Un'altra applicazione di un SHA è un rivelatore di picco. Un tipico esempio è mostrato
in Fig 23.
Quando l’ingresso è più grande dell’uscita dell’SHA, l’uscita positiva del comparatore
costringe l’SHA a inseguire l’ingresso.
Quando l’ingresso diminuisce e diviene più piccolo dell’uscita del SHA, l’uscita “0” del
comparatore costringe l’SHA a mantenere l’ingresso finchè l’ingresso diventa di nuovo
più grande dell’uscita.
Per resettare, l’input di controllo è arbitrariamente acceso in sample e un livello minore
è applicato in ingresso.
L’uscita del SHA (o l’ingresso del comparatore) è polarizzato da 5mV di isteresi per
evitare ambiguità durante gli ingressi a gradino e minimizzare falsi denti di sega
(triggering) dovuti al rumore.
Fig. 23. Schema a blocchi di un rilevatore di picco ed esempio di funzionamento.
5. SHA selettivi e usati
In un sistema di acquisizione dati, il punto dove il campione analogico è preso è spesso
il collegamento più debole, perché molti progettisti di sistema trascurano la natura
contrastante delle esigenze su entrambe le performance statiche e dinamiche.
Come esempio della varietà di SHA a disposizione, in tabella 1 si riportano le
caratteristiche di alcuni SHA.
27
In qui dispositivi che richiedono un condensatore di hold esterno, il trasferimento di
carica è dato in picocolumb (pC). L’errore di offset reale (sample-hold) è dato da:
Verror = Q/C = trasferimento di carica(pC)/capacità hold(pF)
Nello scegliere i condensatori per i dispositivi con questa opzione, l’errore pedestal è
soltanto una delle specifiche da considerare.
Il tempo di assestamento, la velocità di droop, e il tempo di acquisizione sono tutte
funzioni del condensatore di hold.
Quando si confrontano le specifiche di un SHA, si deve essere sicuri di portare in conto
le misurazioni effettuate. Per esempio, la misura del tempo di assestamento
fatta
quando si pilota un carico capacitivo grande sarà raramente cosi buona come le
specifiche definite dal produttore, basate su misure con un semplice carico resistivo. In
breve i progetti di sistema che incorporano SHA richiedono in aggiunta alcune
considerazioni sui circuiti associati e sul layout, per capire e apprezzare le specifiche del
dispositivo.
Con tutto ciò che l’utente deve considerare, fa poca meraviglia che molte fabbriche
offrono pacchetti con ADC e SHA insieme.
Questa è un’altra possibilità di scelta per i progettisti di sistema: i vantaggi di un ADC
completo con un SHA; o la flessibilità offerta dall’immensa varietà di SHA e ADC
utilizzabili singolarmente.
Tabella 1. Caratteristiche di alcuni SHA disponibili sul mercato.
28