Homework 3
Corso di Fondamenti di Comunicazioni
Anno Accademico 2003/2004
xx/yy/2003
1
Teoria statistica delle comunicazioni.
Esercizio 1 (8.1.4)
Un sistema di comunicazioni digitale binario utilizza i segnali
s1 (t) = 0,
0≤t≤T
s2 (t) = A,
0≤t≤T
per trasmissione su un canale di tipo AWGN con PSD del rumore pari a N0 /2.
Questa segnalazione è chiamata on-off keying (OOK).
1. Determinare il ricevitore ottimo e le soglie di decisione ottima. Si assumano i segnali equiprobabili.
2. Determinare la probabilità di errore come funzione di Es /N0 , dove Es
indica l’energia media del sistema. Confrontare i risultati ottenuti con
quelli per le segnalazioni antipodali.
Soluzione 1
1) Una base per i segnali s1 (t) e s2 (t) è data dal segnale (I = 1)
Ã
!
t − T2
1
1
φ(t) = √ wT (t) = √ rect
.
T
T
T
Le componenti dei segnali rispetto alla base sono:
s1 = [0] ;
√
s2 = [A T ] .
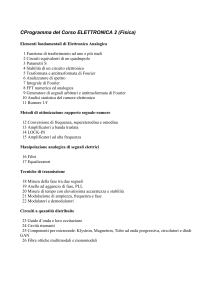
La costellazione dei segnali è rappresentata in Figura 1. Si osserva immedi1
R1
R2
s1
s2
0
A T A T
2
Figura 1: Esercizio 1. Costellazione dei segnali e regioni di decisione ottime.
atamente che, in base al criterio
ML, la soglia di decisione ottima, con segnali
√
equiprobabili, è posta a A T /2 ³e le regioni´di decisione
h associate
´ ai segnali s1
√
e s2 sono rispettivamente R1 = −∞, A 2 T
2) L’energia dei due segnali sono:
Z
+∞
E1 =
e R2 =
√
A T
2
, +∞ .
2
|s1 (τ )| dτ = 0 ;
−∞
+∞
Z
E2 =
2
|s2 (τ )| dτ = A2 T ;
−∞
pertanto l’energia media del sistema è
Es =
A2 T
.
2
Per una modulazione binaria con segnali equiprobabili la probabilità d’errore
è data da1
µ
¶
d
Pe = Q
;
2σI
s
√
E1 + E2 − 2ρ E1 E2
Pe = Q
2N0
s
Ãr !
2T
A
Es
=Q
= Q
2N0
N0
Pertanto, la modulazione on–off richiede una energia più grande di un fattore due (3 dB) rispetto alla modulazione antipodale per raggiungere la stessa
probabilità di errore.2
1 Vedi
2 Vedi
(6.56) e (6.58) a pag. 448-449 del testo.
(6.64).
2
Esercizio 2 (8.1.10)
La demodulazione dei segnali binari antipodali
r
Es
wT (t)
s1 (t) = −s2 (t) =
T
può essere compiuta con l’uso di un singolo integratore, come mostrato in
Figura ??, la cui uscita è campionata in T + kT , k = 0, 1, . . .. Il rumore additivo
è gaussiano a media nulla con densità spettrale N0 /2.
1. Si determini il valore del rapporto γ tra il quadrato dell’ampiezza del segnale utile e la varianza del rumore, all’uscita del demodulatore all’istante
T.
2. Se l’integratore ideale è sostituito dal filtro RC mostrato in Figura ??, determinare il rapporto segnale-rumore γ all’uscita in funzione della costante
di tempo RC.
3. Determinare il valore di RC che massimizza il valore di γ all’uscita.
Soluzione 2
1) Una base per i segnali s1 (t) e s2 (t) è data da
!
Ã
µ
¶
t − T2
1
1
φ(t) = √ wT (t) = √
rect
.
T
T
T
Le componenti dei segnali rispetto alla base sono:
p
s1 = [ E s ] ;
p
s2 = [− Es ] ;
pertando i due segnali hanno egual energia Es .
Lo schema del demodulatore realizza il primo tipo di implementazione del
criterio ML3 a meno di una moltiplicazione per φ(t)∗ che,√nel caso in questione,
corrisponde a un coefficiente moltiplicativo pari a K = T . L’SNR γ all’uscita
del demodulatore sarà:
√
A2y
(K Es )2
2Es
γ=
=
=
.
Mwo
K 2 N0 /2
N0
Allo stesso risultato si poteva giungere direttamente calcolando l’ampiezza
del segnale desiderato e del rumore all’uscita del demodulatore. L’uscita
dell’integratore è
Z t
Z t
y(t) =
r(τ )dτ =
[sn (τ ) + w(τ )]dτ
0
0
Z t
Z t
=
sn (τ )dτ +
w(τ )dτ
0
3 Figura
0
6.8 del testo, pag. 446 e Figura 6.13 a pag. 450.
3
Per t = T si ha
Z
Z T
y(T ) =
sn (τ )dτ +
r
T
w(τ )dτ = ±
0
0
Es
T+
T
Z
T
w(τ )dτ
0
Il quadrato dell’ampiezza del campione desiderato prelevato all’uscita dell’integratore al tempo t = T è
à r
A2y
=
±
mentre la potenza del rumore è
"Z Z
T
Mwo = E
Z
0
T
Z
!2
= Es T
#
T
w(τ )w(v)dτ dv
0
T
=
E[w(τ )w(v)]dτ dv
0
=
Es
T
T
N0
2
0
Z T
Z
T
δ(τ − v)dτ dv =
0
0
Quindi, l’SNR γ è
γ=
N0
T
2
2Es
.
N0
2)
La risposta in frequenza del circuito costituito da resistenza e condensatore è
H(f ) =
1
1 + j2πRCf
L’antitrasformata di tale funzione è
ĥ(t) =
1 − t
e RC 1(t) .
RC
Poiché il condensatore viene scaricato al termine di ogni intervallo di durata T ,
la risposta impulsiva del filtro risultante è pari a
¶
µ
1 − t
t − T /2
RC
e
.
h(t) =
rect
RC
T
Pertanto, il segnale di uscita è dato da
y(t)
=
1
RC
Z
T
0
4
τ
r(t − τ )e− RC dτ ;
che, valutata al tempo t = T , porge
1
y(T ) =
RC
1
=
RC
=
=
Z
Z
T
τ
r(T − τ )e− RC dτ
0
T
r(ν)e−
0
1 −T
e RC
RC
1 −T
e RC
RC
Z
T −ν
RC
dν
T
ν
r(ν)e RC dν
0
Z
T
ν
si (ν)e RC dν +
0
1 −T
e RC
RC
Z
T
ν
w(ν)e RC dν
−∞
L’ampiezza al quadrato del campione desiderato all’uscita del filtro è
A2y
=
2T
1
e− RC
(RC)2
Z
T
Z
T
τ
v
si (τ )si (v)e RC e RC dτ dv
0
0
ÃZ
!2
T
2T Es
τ
1
=
e− RC
e RC dτ
(RC)2
T
0
´2
´2
³ T
2T Es
T
Es ³
= e− RC
e RC − 1 =
1 − e− RC
T
T
La potenza del rumore all’uscita del filtro è
Mwo
=
2T
1
e− RC
(RC)2
=
2T
1
e− RC
2
(RC)
=
=
Z
T
Z
T
τ +v
e RC E[w(τ )w(v)]dτ dv
0
Z
T
0
Z
Z
0
T
0
τ +v
N0
δ(τ − v)e RC dτ dv
2
´
2T
1
1 − 2T N0 ³ 2T
N0 2τ
e− RC
e RC dτ =
e RC
e RC − 1
2
(RC)
2RC
2
−∞ 2
³
´
2T
N0
1 − e− RC
4RC
T
Quindi,
³
´2
³
´2
T
− T
1 − e− RC
A2y
4Es RC 1 − e RC
4Es RC
³
´ =
³
´³
´
=
γ=
2T
T
T
Mwo
T N0
T N0
1 − e− RC
1 − e− RC
1 + e− RC
T
=
4Es RC 1 − e− RC
T
T N0 1 + e− RC
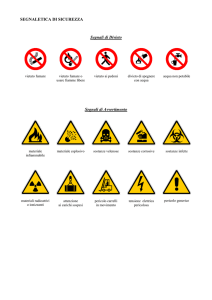
3) Il valore di RC che massimizza γ, viene determinato ponendo a zero la
derivata parziale di γ rispetto a RC. Per semplificare il calcolo, poniamo a =
5
1
2a exp(−a)
1−exp(−2a)
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
1
2
3
4
5
a
6
7
8
9
10
Figura 2: Soluzione grafica dell’equazione trascendente.
T /(RC) e calcoliamo il massimo di γ rispetto ad a. Si ha
∂γ
=0→
∂a
∂ 1 − e−a
0=
∂a a (1 + e−a )
e−a a (1 + e−a ) − (1 − e−a ) (1 + e−a − ae−a )
0=
2
(1 + e−a )
¡
¢
¡
¢
0 = ae−a + ae−2a − 1 − e−2a + ae−a 1 − e−a
0 = 2ae−a − 1 + e−2a
1 − e−2a = 2ae−a
Ne risulta una equazione trascendente in a che, come risulta evidente dalle
curve di Fig. 2, ammette come unica soluzione il valore a = 0, corrispondente
a un valore infinito di RC.
6
Esercizio 3 (8.1.37)
Si consideri un sistema di trasmissione numerico binario con modulazione di
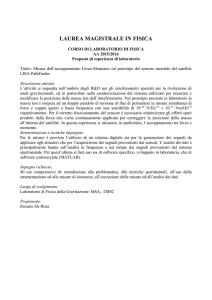
posizione (pulse position modulation, PPM). Sia
g(t) = 2 triangle(t − 1) .
l’impulso fondamentale, mostrato in Figura 3, e siano
s0 (t)
s1 (t)
= g(t)
= g(t − 2)
gli impulsi modulati associati ai simboli 0 e 1, rispettivamente. Si assuma che
i simboli siano indipendenti ed equiprobabili e che la trasmissione avvenga su
un canale Gaussiano bianco, avente Pw (f ) = 0.05. Si determini quanto segue.
1. Determinare le operazioni matematiche del ricevitore ottimo.
2. Qual’è la probabilità di errore risultante?
3. Si indichino due metodi per implementare il ricevitore ottimo, ognuno
dei quali usi un unico filtro lineare, seguito da un campionatore e da un
elemento di decisione. Nel primo metodo si richiede che l’elemento di
decisione operi su due campioni prelevati dall’uscita del filtro, mentre nel
secondo metodo si richiede l’uso di un solo campione. Per ogni metodo
si tracci la risposta impulsiva del filtro usato e il segnale di uscita con
l’ingresso g(t).
Quale dei due metodi è più facilmente estendibile a una modulazione di
posizione M -aria, dove si (t) = g(t − 2i), i = 0, 1, . . . , M − 1?
4. Suggerire un’altra coppia di forme d’onda che richiedano la stessa energia delle forme d’onda binarie usate nella modulazione di posizione e
porti:
4.a) alla stessa probabilità d’errore;
4.b) a una probabilità d’errore più bassa;
5. Calcolare la probabilità di errore minima ottenibile se:
s0 (t) = g(t) e s1 (t) = g(t − 1) .
Ripetere per
s0 (t) = g(t) e s1 (t) = −g(t − 1) .
Soluzione 3
Osserviamo preliminarmente quanto segue.
• Il periodo di simbolo del sistema è T = 4.
• La segnalazione è ortogonale (ρ = 0) con segnali di ugual energia
· 3 ¸1
Z +∞
Z 1
8
t
2
= .
E0 = E1 = Es =
|g(t)| dt = 2
(2 t)2 dt = 8
3 0
3
−∞
0
7
g(t)
2
1
2
t
Figura 3: Esercizio 3. Impulso fondamentale.
• Una base per i segnali è data da
g(t)
φ0 (t) = √
;
Es
g(t − 2)
φ1 (t) = √
;
Es
√
quindi le
√ coordinate dei segnali rispetto alla base sono s0 = [ Es , 0] e
s1 = [0, Es ]
√
• La distanza tra i segnali è d = 2 Es .
• La varianza del rumore bianco per dimensione è σI2 =
N0
2
= 0.05.
1)
Considerando l’implementazione del secondo tipo del ricevitore ottimo4 si osserva che, essendo i segnali reali e con uguale energia, lo schema si riduce al
confronto diretto dei campioni U0 e U1 prelevati al tempo t0 = T all’uscita dei
filtri aventi risposta impulsiva s0 (t0 − t) = g(4 − t) e s1 (t0 − t) = g(2 − t), rispettivamente, il cui ingresso è ovviamente il segnale ricevuto r(t) = si (t) + w(t).
Pertanto si ha
Z +∞
Z 4
Ui =
r(t) si (t) dt =
r(t) si (t) dt ; i = 0, 1 .
−∞
0
La regola di decisione sarà:
U0 > U1 =⇒ â0 = 0 , ovvero U0 − U1 > 0 =⇒ â0 = 0 ;
U0 < U1 =⇒ â0 = 1 , ovvero U0 − U1 < 0 =⇒ â0 = 1 .
Pertanto, dati i campioni Ui , i = 0, 1, l’operazione matematica che compie
il ricevitore ottimo è una sottrazione e un confronto con zero.
4 Fig.
6.10 a pag. 447 del libro
8
1
r(t)
Ritardo di
T’=T/2=2
U0-U1
g(2−t)
t0/2
a0
Compara
con zero
2
Figura 4: Esercizio 3. Prima realizzazione del ricevitore ottimo.
2)
Per una segnalazione ortogonale la probabilità d’errore risulta data da5
Ãr !
!
Ãr !
Ãr
Es
8/3
80
Pe = Q
=Q
=Q
= Q (5.16)
N0
2 × 0.05
3
3.A)
Si osserva che per ottenere i valori campionati Ui , i = 0, 1, si filtra il segnale
ricevuto r(t) con filtri aventi risposta impulsiva uguale, a meno di un ritardo
di t = T2 = 2:
µZ +∞
¶
U0 = (r(τ ) ∗ g(t0 − τ )) (t)t=t0 =
r(t − τ ) g(t0 − τ ) dτ
Z
−∞
Z
+∞
=
t=t0
2
r(t0 − τ ) g(t0 − τ ) dτ =
−∞
r(η) g(η) dη ;
0
µZ
U1 = (r(τ ) ∗ g(t0 − τ − 2)) (t)t=t0 =
Z
r(t − τ ) g(t0 − τ − 2) dτ
−∞
Z
+∞
=
¶
+∞
r(t0 − τ ) g(t0 − τ − 2) dτ =
−∞
t=t0
4
r(η) g(η − 2) dη ;
2
Quindi, ponendo u(t) = (r(τ ) ∗ g(t0 − τ − 2)) (t), si ha
U0 = u(t0 − 2) ;
U1 = u(t0 ) .
Perciò una possibile realizzazione del filtro ottimo è data in Figura 4.
In sostanza, i campioni Ui si ottengono filtrando r(t) con un filtro avente
risposta impulsiva h(t) = g(t0 −2−t) ovvero, essendo t0 = 4, pari a h(t) = g(2−
t), la cui uscita viene prelevata con periodo T00 = t0 /2 = 2. Il primo campione,
preso al tempo t = t0 , dà u(t0 − 2) = U0 . Tale campione viene ritardato di T00 =
2, in modo da allinearlo al secondo campione, prelevato all’istante t = t0 + T00
e pari a u(t0 + T00 − 2) = u(t0 ) = U1 . I due campioni vengono quindi sottratti
e comparati come visto al punto 1). Pertanto, il ricevitore può essere realizzato
tramite un solo filtro con risposta impulsiva g(2 − t).
5 Eq.
(6.71) del testo, pag. 451.
9
La risposta impulsiva del filtro si può scrivere come g(2 − t) = g− (t − 2),
dove g− (t) = g(−t) è speculare a g(t) rispetto all’asse delle ascisse, e g− (t − 2)
è una traslazione di +2. Pertanto, g(2 − t) coincide con g(t) ed è mostrata in
Figura 3. L’uscita del filtro in corrispondenza dell’ingresso g(t) coincide con
l’autocorrelazione rg (t) di g(t) e risulterà quindi simmetrica rispetto all’asse
t = 2. Si ha:
Z +∞
Z +∞
rg (t) =
g(τ )g(t − τ )dτ =
g(τ )g− (τ − t)dτ
Z
−∞
+∞
=
−∞
Z
t
g(τ )g(τ − t + 2)dτ =
−∞
g(τ )g(τ − t + 2)dτ ;
0≤t≤4.
(1)
0
Ricordando che g(t) = 2(1 − |t − 1|), calcoliamo (1) per 0 ≤ t ≤ 1. Si ha
Z
t
rg (t) =
4(1 − |τ − 1|)(1 − |τ − t + 1|)dτ
Z
0
t
=
0
·
τ3
τ2
4 τ (−τ + t) dτ = 4 − + t
3
2
2t3
=
;
3
¸t
0
0≤t≤1.
Per 1 ≤ t ≤ 2. Si ha
Z t
rg (t) =
4(1 − |τ − 1|)(1 − |τ − (t − 1)|)dτ
Z
0
Z
t−1
=
0
Z
1
4 τ (2 − t + τ ) dτ +
4 τ (−τ + t) dτ +
t−1
t
4 (2 − τ ) (−τ + t) dτ
1
·
¸t−1
· 3
¸1
·
¸t
τ2
τ3
τ
τ2
τ2
τ3
= 4 (2 − t) +
+4 − +t
+ 4 2 t τ − (t + 2) +
2
3 0
3
2 t−1
2
3 1
·
3
3
2
2
(t − 1)
1
t
(t − 1)
(t − 1)
(t − 1)
+
− + +
−t
= 4 (2 − t)
2
3
3 2
3
2
¸
2
3
t
t
t+2 1
+2 t2 − (t + 2) + − 2 t +
−
2
3
2
3
·
¸
2
3
(t − 1)
2(t − 1)
3t
t3
t3
t
1
2
= 4 (2 − 2t)
+
−
+t − + + +
2
3
2
2
3
2 3
¸
·
3
¢
t
1
2¡
1
=
= 4 − (t − 1)3 − t + t2 − +
−2(t − 1)3 − 6t + 6t2 − t3 + 2
3
6
3
3
¢
¢
2¡
2¡
=
−2(t3 − 3t2 + 3t − 1) − 6t + 6t2 − t3 + 2
=
−3t3 + 12t2 − 12t + 4
3
3
8
3
2
= −2t + 8t − 8t +
3
Una raffigurazione del segnale è data in Figura 5
10
3.B)
Un ricevitore che usi un solo filtro si può ottenere considerando la regola di
decisione basata sulla differenza dei valori U0 e U1 , ovvero:
U0 − U1 > 0 =⇒ â0 = 0 ;
U0 − U1 < 0 =⇒ â0 = 1 .
Ricordando il modo in cui si ricavano le Ui si ottiene immediatamente:
Z +∞
r(τ ) (s0 (τ ) − s1 (τ )) dτ
U0 − U1 =
−∞
+∞
µZ
=
¶
r(τ ) (g(τ − t + t0 ) − g(τ − t + t0 − 2)) dt
−∞
t=t0
= (r(η) ∗ g(t0 − η)) (t)t=t0 − (r(η) ∗ g(t0 − 2 − η))) (t)t=t0
Quindi il valore U0 − U1 si può ottenere filtrando il segnale ricevuto r(t) con
un filtro avente risposta impulsiva h2 (t) = g(t0 − t) − g(t0 − 2 − t) = g(4 − t) −
g(2 − t) = g(t − 2) − g(t) e campionando l’uscita con periodo t0 . Il corrispondente ricevitore è mostrato in Figura 6, mentre la risposta impulsiva del filtro
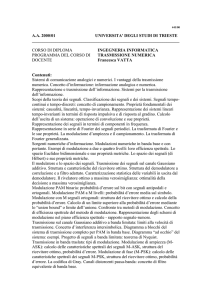
è mostrato in Figura 7. L’uscita del filtro in corrispondenza dell’ingresso g(t) è
pari a:
Z
+∞
y2 (t) =
h2 (τ )g(t − τ )dτ
−∞
Z +∞
=
Z
+∞
g(τ − 2)g(t − τ )dτ −
−∞
g(τ )g(t − τ )dτ
−∞
= rg (t − 2) − rg (t) .
ed è rappresentata in Figura 8.
Per rispondere all’ultima parte del quesito di osservi che una semplice estensione del primo ricevitore ad una modulazione PPM M -aria si può ottenere
banalmente con un solo filtro (avente nucleo g(t)) la cui uscita viene campionata M volte in un periodo T = 2M . Viceversa, una semplice estensione
del secondo ricevitore richiederebbe di utilizzare (M − 1)! filtri per operare
PM −1
tutte le possibili sottrazioni del tipo Ui0 − j=1 Uij , dove i0 , . . . , iM −1 è una
permutazione di 0, 1, . . . , M1 . Conseguentemente, è decisamente più semplice
estendere il primo ricevitore a una modulazione M -aria.
4)
Per ottenere la stessa probabilità di errore con segnali aventi uguale energia
Es = 83 di quelli usati nella modulazione PPM è sufficiente considerare due
segnali ortogonali con energia Es = 83 . Un esempio è dato dai segnali s00 (t) e
s01 (t) di Figura 9. Essendo i segnali antipodali con energia pari a Es = 38 , la
probabilità d’errore è la stessa ottenuta per la modulazione PPM con segnali
s0 (t) e s1 (t).
11
3
2.5
1.5
g
r (t)
2
1
0.5
0
0
0.5
1
1.5
2
t
2.5
3
3.5
4
Figura 5: Esercizio 3. Segnale di uscita del filtro in corrispondenza all’ingresso
g(t).
r(t)
U0-U1
g(4-t)-g(2−t)
a0
Compara
con zero
t0=T=4
Figura 6: Esercizio 3. Seconda realizzazione del ricevitore ottimo.
h2(t)=g(4-t)-g(2-t)
3
2
2
h2(t)
1
1
2
3
4 t
0
−1
−2
-2
−3
Figura 7: Risposta impulsiva del
secondo filtro (domanda 3.B).
12
0
1
2
3
t
4
5
6
Figura 8: Uscita del secondo filtro
all’ingresso g(t) (domanda 3.B).
Per ottenere una probabilità d’errore più bassa si possono considerare segnali antipodali, ovvero tali per cui si abbia ρ = −1. Un esempio di segnali s000
e s001 di questo tipo è mostrato in Figura 10. La probabilità di errore, in questo
caso, è data da:6
Ãr
Ãr
!
!
2Es
16/3
Pe = Q
=Q
= Q (7.3)
N0
2 × 0.05
s0’(t)
s0’’(t)
2
3
2
3
1
2
3
t
4
1
2
3
4
t
2
3
Figura 9: Esempio di segnali ortogonali con energia Es = 83 .
s0’’(t)
s1’’(t)
2
3
1
2
3
4
t
1
2
2
3
Figura 10: Esempio di segnali antipodali con energia Es = 83 .
6 Eq.
(6.64) pag. 450.
13
3
4
t
5)
Una segnalazione binaria con segnali di ugual energia Es ed equiprobabili dà
una probabilità d’errore pari a7
Ãs
!
Ãr
!
´
³
p
Es
8/3
(1
−
ρ)
.
Pe = Q
(1
−
ρ)
=
Q
(1
−
ρ)
=
Q
5.16
2σI2
2 × 0.05
Resta da calcolare il coefficiente di correlazione dato da:
R +∞
s0 (t)s∗1 (t)dt
ρ = −∞
.
Es
Nel primo caso si ha
ρ1 =
1
Es
Z
+∞
g(t)g(t − 1) dt =
−∞
Z 2
¡
1
Es
Z
2
2(1 − (t − 1)) 2(t − 1) dt
1
Z 1
¢
4
(t − 1) − (t − 1)2 dt =
(u − u2 ) du
E
s 0
1
·
¸1
µ
¶
u3
1 1
1
4 u2
4
−
−
= ;
=
=
Es 2
3 0
8/3 2 3
4
=
4
Es
mentre, nel secondo caso, risulta ρ2 = −ρ1 .
Pertanto, nei due casi risulta
³
´
p
Pe1 = Q 5.16 (1 − ρ1 ) = Q (4.47) ;
´
³
p
Pe2 = Q 5.16 (1 − ρ2 ) = Q (5.77) .
7 Eq.
(6.59) pag. 449.
14
Esercizio 4 (8.1.12)
I segnali {sm (t)}, m = 1, 2, 3, devono essere trasmessi su un canale AWGN con
densità spettrale N0 /2. I tre segnali sono definiti nel seguente modo
½
1 se 0 ≤ t ≤ T
s1 (t) =
0 altrimenti
se 0 ≤ t ≤ T2
1
s2 (t) = −s3 (t) =
−1 se T2 ≤ t ≤ T
0
altrimenti
1. Qual è la dimensione M dello spazio dei segnali?
2. Si trovi una opportuna base ortonormale per lo spazio dei segnali (si può
trovare la base senza usare la procedura di Gram-Schmidt).
3. Disegnare la costellazione del sistema per questo problema.
4. Derivare e disegnare le regioni di decisione ottima R1 , R2 e R3 .
5. Quale dei 3 segnali è più sensibile all’errore e perché? In altre parole, qual
è la probabilità d’errore condizionata più grande?
Soluzione 4
1) Poiché s2 (t) = −s3 (t) la dimensione dello spazio dei segnali è al più 2.
2) Come base dello spazio dei segnali consideriamo le seguenti funzioni
1
½ 1
0 ≤ t ≤ T2
√T
√
0
≤
t
≤
T
1
1
T
T
= √ s1 (t) ;
φ0 (t) =
φ2 (t) =
−√
2 <t≤T
0 altrove
T
0 T altrove
La rappresentazione vettoriale dei segnali è
√
s1 = [ T , 0]
√
s2 = [0,
T]
√
s3 = [0, − T ]
3) La costellazione dei segnali è mostrata di seguito.
15
1
= √ s2 (t) .
T
v(0,
√
T)
v√
( T , 0)
√
v
(0, − T )
4) In base al criterio ML8 , data l’osservazione r = ρ, la probabilità di decisione
corretta è massimizzata quando si sceglie il simbolo n per cui sn è più vicino
a ρ. Pertanto, la regione di decisione per il generico simbolo n sarà costituita
da tutti i punti nello spazio <I = <2 che distano da sn meno che da ogni altro
punto della costellazione sm 6= sn . Conseguentemente, le regioni di decisione
sono quelle mostrate di seguito.
R2
R1
0 @
@
R3
@
@
@
@
Un modo più laborioso per giungere allo stesso risultato è il seguente. Si
considerano i tre possibili valori di uscita del filtro adattato, corrispondenti
ai tre possibili segnali trasmessi. Essi sono:
√
+ w1 , w2 ),
se a0 = 1;
( T√
r = (r1 , r2 ) =
(w1 , √
T + w2 ),
se a0 = 2;
(w1 , − T + w2 ), se a0 = 3;
dove w1 , w2 sono variabili aleatorie Gaussiane indipendenti a media nulla e con varianza N20 . Se tutti i segnali sono equiprobabili, la regola di
decisione ottima selezione il segnale che massimizza la metrica9
C(r, sn ) = 2Re [< r, sn >] − ksn k2
8 Eq.
9 Eq.
(6.30) pag. 442.
(6.43) pag. 446.
16
ovvero, essendo ksn k2 uguali per tutti gli n ed essendo i segnali reali,
C 0 (r, sn ) =< r, sn >=
2
X
r i si .
i=1
Pertanto, la regione di decisione ottima R1 per s1 è l’insieme dei punti
r = (r1 , r2 ), tali che√< r, s1 > sia maggiore
√ di < r, s2 > e < r,√s3 >.
Essendo < r, s1 >= T r1 , < r, s2 >= T r2 and < r, s3 >= − T r2 ,
le condizioni precedenti si possono scrivere come
r1 > r2
e
r1 > −r2 .
Analogamente, si trova che R2 è l’insieme di punti r = (r1 , r2 ) che soddisfano r2 > 0, r2 > r1 e R3 è la regione in cui r2 < 0 e r2 < −r1 .
Quindi si riottengono le regioni della precedente figura.
5) Se i tre segnali sono equiprobabili è evidente che il più sensibile agli errori è
s1 (t) in quanto la regione di decisione R1 è più piccola. Formalmente si ha,
P [E|a0 = 1] = P [r ∈
/ R1 |a0 = 1]
£
¤
£
¤
2
= P kr − s1 k > kr − s2 k2 |a0 = 1 + P kr − s1 k2 > kr − s3 k2 |a0 = 1
£
¤
£
¤
= P kwk2 > |w + s1 − s2 k2 + P kwk2 > |w + s1 − s3 k2
h
i
√
√
= P w12 + w22 > (w1 + T )2 + (w2 − T )2 + . . .
h
i
√
√
+ P w12 + w22 > (w1 + T )2 + (w2 + T )2
h
√
√ i
= P w12 + w22 > w12 + T + w22 + T + 2w1 T − 2w2 T + . . .
h
√ i
√
+ P w12 + w22 > w12 + T + w22 + T + 2w1 T + 2w2 T
h
h
√ i
√ i
= P w2 − w1 > T + P w1 + w2 < − T .
Poiché, w1 , w2 sono variabile aleatorie Gaussiane indipendenti e a media nulla,
ognuna con varianza N20 , le variabili aleatorie x = w1 − w2 and y = w1 + w2
sono Gaussiane a media nulla e con varianza N0 . Per cui,
Z ∞
Z −√T
y2
x2
1
1
− 2N
0 dx + √
P [E|a0 = 1] = √
e− 2N0 dy
√ e
2πN0
2πN0 −∞
T
"r #
"r #
"r #
T
T
T
+Q
= 2Q
= Q
N0
N0
N0
√
Quando si trasmette s2 allora r = [w1 , w2 + T ] e quindi,
h
h
√ i
√ i
P [E|a0 = 2] = P w1 − w2 > T + P w2 < − T
"r #
"r #
T
2T
+Q
= Q
N0
N0
17
Per la simmetria del problema, si ha infine
"r
P [E|a0 = 3] = P [E|a0 = 2] = Q
#
"r #
T
2T
+Q
N0
N0
Poiché Q[·] è monotona descrescente, si ottiene
"r #
"r #
2T
T
Q
<Q
N0
N0
e quindi, la probabilità di errore condizionata P [E|a0 = 1] e la maggiore.
18
Esercizio 7 (8.1.29)
Si considerino le costellazioni ottali di Figura ??.
1. La distanza minima tra i segnali nella costellazione 8-QAM è pari ad A.
Determinare i raggi a e b dei cerchi esterno e interno.
2. I segnali adiacenti nella costellazione 8-PSK sono separati da una distanza A. Determinare il raggio r del cerchio.
3. Determinare le potenze medie necessarie ai trasmettitori per le due costellazioni di segnali e confrontare le potenze. Qual è il vantaggio in potenza di una costellazione rispetto all’altra? (Assumere che i simboli siano
equiprobabili.)
Soluzione 7
1) Usando il teorema di Pitagora si trova che il raggio del cerchio interno della
prima costellazione QAM è
1
a2 + a2 = A2 =⇒ a = √ A .
2
Il raggio del cerchio esterno può essere determinato usando la regola del coseno.
Essendo b il terzo lato di un triangolo avente a e A come altri due lati e θ = 105o
come angolo sotteso, si ricava
√
1+ 3
2
2
2
o
b = a + A − 2aA cos 105 =⇒ b =
A.
2
In alternativa, b si può calcolare come:
√
b = A cos(π/3) + a cos(π/4) = A
√
√
√
3
2
3
1
1+ 3
+a
=A
+A =
A
2
2
2
2
2
2) Indicando con r il raggio del cerchio e usando la regola del coseno si ottiene
A
A2 = r2 + r2 − 2r cos 45o =⇒ r = p
2−
√ .
2
3) L’energia di trasmissione media per una costellazione PSK è10
EsPSK
10 Vedi
M
M
1 8
1 X
1 X Eh
= × ×
=
En =
M n=1
M n=1 2
8 2
pg. 466 libro di testo
19
Ã
A
p
√
2− 2
!2
.
Pertanto, la potenza media in trasmissione è pari a
MPSK
Es
1
=
=
×
T
2T
Ã
p
A
2−
!2
√
2
=⇒ MPSK =
1
A2
√ .
×
2T
2− 2
Per una costellazione QAM si ha un energia media pari a11
Es
QAM
M
M
1 X
1 1
1 X
2 Eh
=
= ×
En =
|αn |
M n=1
M n=1
2
8 2
Ã
!
√
A2
(1 + 3)2 2
4
+4
A
.
2
4
Percui, si ottiene
Ã
!
"
√
√ #
1
A2
(1 + 3)2 2
2 + (1 + 3)2
4
+4
A
A2 .
MQAM =
=⇒ MQAM =
16T
2
4
16T
Quindi, il vantaggio relativo di potenza di una costellazione PSK su una QAM
è
MPSK
8
√
√ = 1.6 dB .
gain =
=
MQAM
(2 + (1 + 3)2 )(2 − 2)
11 Pg.
480 del testo.
20
Esercizio 8 (8.1.34)
Per un canale affetto da AWGN con una banda passante di 100 kHz e N0 /2 =
0.5 × 10−10 V2 /Hz, determinare il massimo bit rate Rb che può essere raggiunto con ricevitore non coerente per una trasmissione 4-PSK, 2-FSK e 4-FSK
ortogonale.
Soluzione 8
Si richiama innanzitutto la definizione di bit rate Rb per un sistema di trasmissione. Denotando con Tb il periodo di bit, si ha che Rb = 1/Tb . Inoltre, indicando con T il periodo di simbolo e ricordando che con una costellazione di M
simboli si trasmettono log2 M bit per ogni simbolo, si ha che Tb = T / log2 M ,
percui
1
Rb = log2 M .
T
(a) Q–PSK
La banda minima convenzionale di un sistema PSK è Bmin = 1/T . Pertanto, la
frequenza di simbolo deve essere tale che
1
= 100000
T
dove B = 105 Hz è la banda del canale. Il bit-rate è
Rb =
1
log2 M = Bmin log2 M = 2 × 105
T
bit/s = 200
kbit/s
(b) B–FSK con ricevitore non coerente
La banda minima convenzionale di un sistema M–FSK non coerente è Bmin =
M/T .12 Quindi, il bit–rate è dato da:
Rb =
1
Bmin
100 × 103
log2 M =
log2 M =
= 50
T
M
2
kbit/s .
(c) M = 4 FSK con ricevitore non coerente
In questo caso si ha
Rb =
12 Pag.
Bmin
100 × 103
100 × 103
log2 M =
log2 4 =
= 50
M
4
2
487 libro di testo.
21
kbit/s .