SISTEMA DI CONTROLLO
DIGITALE REAL TIME “RT3”
MANUALE OPERATIVO
Gennaio 2008
RT3: Manuale Operativo – gennaio 2008
-1-
Informazioni
COPYRIGHT: I marchi dei prodotti ed il software fornito sono di proprietà di Trio Sistemi e Misure S.r.l. o dei suoi fornitori e sono tutelati dalle leggi
vigenti sul copyright, dalle disposizioni dei trattati internazionali e dalle altre leggi nazionali applicabili. L’utilizzatore può eseguire una copia d’archivio del
software in dotazione. Operazioni di manipolazione, alterazione, conversione, decodifica, decompilazione, disassemblaggio e simili sono illegali. La
documentazione, sia scritta che su supporto elettronico, non può essere divulgata senza la preventiva autorizzazione scritta da parte di Trio Sistemi e Misure.
Nessuna parte della documentazione può essere trasmessa in qualunque forma, sia essa elettronica, meccanica, fotocopia ecc.
LICENZA DEL SOFTWARE: Tutto il software fornito è di proprietà di Trio Sistemi e Misure o dei suoi fornitori e viene concesso in Licenza d’uso. La
concessione della licenza d’uso è subordinata alla condizione che Trio Sistemi e Misure e i suoi fornitori siano tenuti indenni e manlevati dall’utente nei
confronti di qualsivoglia rivendicazione o azione giudiziale, comprese le spese legali derivanti dall’uso o dalla distribuzione dei prodotti dell’utilizzatore.
DOCUMENTAZIONE: La documentazione fornita è stata attentamente verificata; tuttavia Trio Sistemi e Misure ed i suoi fornitori non assumono alcuna
responsabilità per le conseguenze di possibili errori od omissioni nelle informazioni riportate o di eventuali caratteristiche o variazioni non documentate dei
propri prodotti. E’ responsabilità dell’utilizzatore la conservazione in modo riservato delle parti contenenti le informazioni sul funzionamento dei prodotti
sia hardware che software.
VARIAZIONI: Trio Sistemi e Misure ed i suoi fornitori si riservano il diritto di modificare le caratteristiche dei propri prodotti e di cambiarne le specifiche
senza preavviso.
LIMITI DI GARANZIA: Il periodo di garanzia è di 1 anno dalla data di acquisto. Limitatamente a questo periodo ed in caso di malfunzionamenti
dell’hardware o del software, sarà possibile a discrezione di Trio Sistemi e Misure: a) la riparazione o la sostituzione del software o dell’hardware, purché il
materiale sia fatto pervenire a Trio Sistemi e Misure a cura e carico dell’utilizzatore e reso all’utilizzatore stesso a sua cura e carico secondo le sue
indicazioni; b) la restituzione del prezzo pagato. La presente garanzia viene meno qualora il vizio del software o dell’hardware derivi da incidente, uso
inidoneo od erronea applicazione.
ESCLUSIONE DI ALTRE GARANZIE: Trio Sistemi e Misure non riconosce alcuna altra garanzia, espressa o implicita, comprese, tra le altre, la garanzia
di commerciabilità e idoneità per un fine particolare relativamente al software, all’hardware e ad ogni altro materiale di accompagnamento.
ESCLUSIONE DI RESPONSABILITA’: In nessun caro Trio Sistemi e Misure e i suoi fornitori saranno ritenuti responsabili per eventuali danni, inclusi
senza limitazioni il danno per perdita o mancato guadagno, interruzione dell’attività, perdita di informazioni o altre perdite economiche, danni diretti o
indiretti, incidentali o consequenziali derivante dall’uso o nell’impossibilità di uso dei prodotti forniti per qualunque ragione, compresi guasti o anomalie di
funzionamento dell’hardware o del software forniti ed anche nel caso in cui Trio Sistemi e Misure non sia stata avvertita della possibilità di tali danni.
Analogamente Trio Sistemi e Misure non sarà ritenuta responsabile dei danni causati da un utilizzo illegale dei sui prodotti o dalla diffusione illegale di
copie di programmi o codici di calcolo o dati riservati.
Trio Sistemi e Misure non è responsabile per un uso improprio dei suoi prodotti e non garantisce né autorizza l’utilizzo degli stessi nelle applicazioni ove
possano causare danni a persone o cose, sia in funzionamento normale che durante situazioni di guasto o anomalie.
FORNITURE ADDIZIONALI: Le presenti condizioni si applicano anche al software ed all’hardware delle forniture successive, come nel caso in cui
l’utilizzatore riceva o acquisti aggiornamenti , ulteriori licenze o utilities software, oppure altri prodotti hardware successivi al primo.
RT3: Manuale Operativo – gennaio 2008
-2-
SOMMARIO
pagina
1
Introduzione
5
2
Installazione dell’hardware
6
3
Principi del loop di controllo
9
4
Caratteristiche del sistema RT3
11
5
Composizione tipica del sistema di controllo
13
5.1
Controllore RT3 ...........................................................................................................................13
5.2
Personal Computer.......................................................................................................................14
6
Descrizione del software di gestione del sistema RT3 ……………………………………..15
6.1
Parametri PID..............................................................................................................................18
6.2
Servovalvola.................................................................................................................................20
6.3
Channel limit channel ..................................................................................................................22
6.4
Definizione modalità di controllo ................................................................................................24
6.5
Definizione canali di acquisizione ...............................................................................................26
6.6
Assegnazione trasduttori..............................................................................................................27
6.7
Definizione canale calcolato........................................................................................................28
6.8
Definizione limiti..........................................................................................................................29
6.9
Azzeramento dei trasduttori .........................................................................................................31
6.10 Definizione sensori.......................................................................................................................32
6.11 Condizionatori .............................................................................................................................34
6.12 Oscilloscopio................................................................................................................................35
6.13 Oscilloscopio multitraccia ...........................................................................................................37
6.14 Indicatori digitali .........................................................................................................................38
6.15 Acquisizione .................................................................................................................................39
6.16 Test Fatica ...................................................................................................................................42
6.17 Visualizzazione files acquisiti ......................................................................................................48
6.18 Posizionamento ..........................................................................................................................522
RT3: Manuale Operativo – gennaio 2008
-3-
6.19 Generatore .................................................................................................................................533
6.20 Parametri controllo d’ampiezza ..................................................................................................56
6.21 Generatore step............................................................................................................................57
6.22 Impostazione numero di cicli .......................................................................................................60
6.23 Profilo arbitrario .........................................................................................................................61
6.24 Profilo ampiezza variabile ...........................................................................................................62
7
Appendice A: Connettori
63
7.1
Collegamento dei trasduttori........................................................................................................63
7.2
Collegamento delle servovalvole ................................................................................................64
7.3
Collegamento della pompa .........................................................................................................65
7.4
Ponticelli per il collegamento del controllore senza pompa .......................................................66
7.5
Collegamento del manifold idraulico ..........................................................................................67
7.6
Collegamento del pulsante esterno di emergenza .......................................................................68
7.7
Ponticelli per il funzionamento senza pulsante esterno di emergenza ........................................68
8
Appendice B: esempio di file per profilo arbitrario
63
9
Appendice C: esempio di file per profilo ampiezza variabile
70
10
Dichiarazione di conformità CE
71
11
Indice delle figure
72
RT3: Manuale Operativo – gennaio 2008
-4-
1 Introduzione
Il sistema di controllo digitale RT3 è realizzato sulla base di un’esperienza ventennale maturata nel
settore della sperimentazione, con particolare riferimento ai sistemi di prova materiali ed alle
apparecchiature di simulazione, operando con i principali Gruppi industriali, Centri di Ricerca ed Istituti
Universitari del panorama italiano.
Il sistema RT3 è il risultato di una progettazione personalizzata basata sulla integrazione di componenti a
tecnologia avanzata, affidabili, facilmente reperibili e sostituibili con gli stessi che il mercato, di volta in
volta, offrirà nelle versioni più evolute.
Esso è realizzato su piattaforma hardware Real Time di National Instrument ed il software è
completamente sviluppato con LabView. In particolare, il sistema RT3 è costituito da un computer
embedded e da una o più schede di acquisizione e generazione che vengono selezionate ed abbinate
sulla base delle specifiche caratteristiche dell’applicazione finale. I vari componenti sono disponibili sul
mercato e facilmente reperibili nel caso di aggiornamento o di improbabile guasto. Il controllore RT3 è
gestito da un applicativo software che opera con sistema operativo Real Time e si interfaccia tramite
link di rete ethernet con un normale PC in ambiente Windows XP, dove risiede un applicativo software
sviluppato con Labview per la gestione del sistema, l’interfaccia utente ed il salvataggio delle
configurazioni e dei dati acquisiti.
Nel sistema RT3 sono integrati i moduli elettronici per il condizionamento dei trasduttori, il pilotaggio
delle servovalvole e la gestione delle apparecchiature idrauliche.
Sulla base di questi presupposti ed in considerazione della versatilità del suo software, il sistema
conserverà la sua validità ed attualità nel tempo per soddisfare le crescenti esigenze operative. La
particolare configurazione iniziale delle schede di acquisizione e generazione permette di definire il
numero di canali di controllo, per la realizzazione di complesse apparecchiature di prova.
Il sistema di controllo RT3 può essere impiegato per il controllo di macchine idrauliche ed
elettromeccaniche.
Figura 1: Il sistema di controllo RT3
RT3: Manuale Operativo – gennaio 2008
-5-
2 Installazione dell’hardware
Il sistema RT3 deve essere posizionato in modo da consentire all’operatore un facile utilizzo, quindi
sono necessari spazi adeguati per un corretto uso di mouse e tastiera con libero accesso al pulsante di
emergenza posto sul pannello frontale del controllore. Quest’ultimo deve essere posizionato in un punto
tale per cui le prese d’aria inferiori e superiori non siano ostruite (è importante non coprire la foratura
superiore del controllore con fogli, quaderni o qualsiasi alto materiale) e possibilmente lontano da fonti
di calore, per evitare surriscaldamenti della macchina e conseguenti danni all’elettronica.
Per il collegamento alla rete elettrica si usano i tre cavi in dotazione (uno per il pc, uno per il monitor e
uno per il controllore). Si raccomanda di collegare l’alimentazione elettrica del controllore RT3 e del
corrispondente personal computer ad un gruppo di continuità (UPS), al fine di proteggere l’elettronica
da eventuali sbalzi di tensione e garantire lo spegnimento controllato dell’apparecchiatura di prova in
caso di blackout.
Quando per esempio si controllano apparecchiature elettroidrauliche, tipicamente esse sono collegate ad
un impianto oleodinamico con componenti in pressione; in caso di mancanza di energia elettrica la
pompa si spegne ma il circuito idraulico è pressurizzato e spesso vi sono anche degli accumulatori
caricati. Per questo motivo il sistema di controllo RT3 deve rimanere alimentato per il tempo necessario
a smaltire in modo controllato l’energia accumulata nell’impianto. Le stesse raccomandazioni si
applicano quando il controllore RT3 gestisce apparecchiature di tipo elettromeccanico dove l’energia è
accumulata in forma elettrica nell’azionamento di potenza (condensatori).
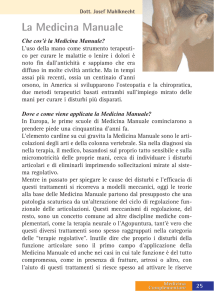
Figura 2: Pannello frontale del controllore RT3
Sul pannello frontale sono presenti due indicatori luminosi la cui vista non deve essere ostruita:
Alimentazione: questo indicatore mostra lo stato di alimentazione elettrica del controllore RT3.
Stato:
con indicatore verde il sistema funziona normalmente;
con indicatore rosso il sistema si trova in fase di accensione (la durata dell’avvio è di
circa un minuto), se la luce non cambia di stato dopo la fase di avvio oppure diventa
rossa durante il normale funzionamento allora significa che il software realtime è stato
RT3: Manuale Operativo – gennaio 2008
-6-
bloccato e sono state rimosse tutte le attivazioni del circuito idraulico; se il problema
persiste è necessario contattare il servizio di assistenza tecnica;
se l’indicatore è spento significa che è premuto un pulsante di emergenza, oppure è
attiva una funzione di interlock.
Il pulsante di emergenza interrompe la tensione 24 V di attivazione dei circuiti di potenza
(idraulico o elettrico in funzione del tipo di apparecchiatura gestita). Il pulsante di emergenza
deve essere premuto solo in caso di necessità, mentre per le fasi normali di spegnimento è
preferibile eseguire le apposite graduali operazioni. Se si deve operare vicino agli organi in
movimento è necessario rimuovere la potenza idraulica o elettrica ed è buona norma mantenere
premuto il pulsante di emergenza, al fine di evitare eventuali involontarie attivazioni.
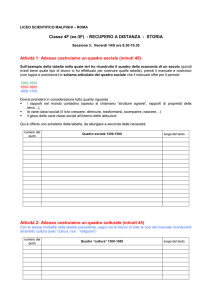
L’interruttore elettrico per l’accensione del controllore si trova sul pannello posteriore e la presenza di
tensione è segnalata dall’apposita spia.
Figura 3: Pannello posteriore del controllore RT3
Sul pannello posteriore del controllore RT3 è presente una serie di connettori di diverso tipo:
- connettori a vaschetta da 15 poli (nominati da 1 a 12): servono il collegamento sei trasduttori di
controllo e/o di acquisizione. In base alle esigenze specifiche possono essere installate diverse
tipologie di condizionatori di segnale. Quando non è installato un condizionatore in
corrispondenza di uno specifico connettore, è comunque possibile collegare un segnale ad alto
livello (nel campo compreso tra -10 e +10 volt). I connettori a vaschetta forniscono anche
l’alimentazione a 24 volt oppure a +/- 12 volt per trasduttori con elettronica integrata.
- Connettori a vaschetta da 15 poli per il pilotaggio delle servovalvole (nominati da SV1 a SV4):
sono presenti segnali in corrente tipicamente configurati per +/- 50 mA oppure segnali di
pilotaggio in tensione nel campo +/- 10 volt.
- Connettori a vaschetta da 15 e 9 poli (Aux1… Aux6) per segnali ausiliari come ingressi digitali
optoisolati e uscite digitali come contatti di scambio relè oppure in formato TTL.
RT3: Manuale Operativo – gennaio 2008
-7-
- Ingressi ausiliari (connettori BNC da 13 a 30): servono per il collegamento di segnali ad alto
livello nel range +/- 10 volt, impiegati per il controllo, l’acquisizione dati o come segnali di
comando provenienti da generatori di funzione esterni.
- BNC Ausiliari (da 1 a 6): disponibili pere applicazioni particolari.
- BNC Monitor (da 1 a 12): replicano il segnale acquisito mediante i connettori a vaschetta da 1 a
12; nel caso in cui siano presenti dei condizionatori, il segnale presente sui BNC Monitor
corrisponde all’uscita amplificata.
- Connessione PC: connettore del cavo di rete ethernet impiegato per la comunicazione tra il
controllore RT3 ed il personal computer di gestione.
- Pompa: connettore per il collegamento del cavo di comando della pompa.
- Manifold: connettore per il collegamento del cavo di comando del manifold.
-
Emergenza: connettore per il collegamento di pulsanti esterni di emergenza.
Nel caso di impiego del controllore RT3 per il pilotaggio di una macchina di tipo
elettromeccanico, i connettori denominati pompa e manifold potrebbero essere collegati ai
dispositivi elettrici di potenza.
RT3: Manuale Operativo – gennaio 2008
-8-
3 Principi del loop di controllo
Il principio del loop di controllo può essere così riassunto: l’algoritmo PID compara il comando con la
risposta ottenendo l’errore; questo viene elaborato sulla base dei guadagni e diviene il comando al
dispositivo di regolazione, costituito dalla servovalvola nel caso di un attuatore idraulico oppure
dall’azionamento nel caso di un motore elettrico. per generare un segnale che piloti la servovalvola;
questa regola il flusso dell’olio del circuito idraulico per far muovere l’attuatore che agisce sul
campione.
Il comando è definito nel controllore RT3 mediante la somma del valore di Setpoint e di quanto
programmato con il generatore di funzioni. Esso rappresenta il profilo da eseguire in funzione della
specifica modalità di controllo impostata.
La risposta o retroazione è costituita dal segnale fornito dal trasduttore per il quale si vuole realizzare il
profilo comandato.
La differenza tra comando e risposta è l’errore.
Con il controllore RT3 l’algoritmo PID è eseguito 2000 volte al secondo, ogni volta il comando è
confrontato con la risposta per poi definire l’azione di correzione.
Nel caso di un sistema elettroidraulico il segnale di correzione viene convertito in corrente per il
pilotaggio della servovalvola, dopo avere sommato il contributo di dither ed il bilanciamento.
L’ algoritmo PID è costituito principalmente da tre fattori:
P : guadagno proporzionale
I : guadagno integrativo
D : guadagno derivativo.
Il guadagno proporzionale P è il fattore di moltiplicazione dell’errore calcolato tra comando e risposta.
In generale, aumentare il guadagno proporzionale del controllore significa incrementare la velocità di
risposta del sistema di controllo e diminuire l'errore a regime. Se si aumenta troppo il guadagno
proporzionale si possono manifestare delle oscillazioni della variabile controllata fino a raggiungere
l’instabilità, con oscillazioni non più controllate.
Il guadagno integrativo I definisce l’azione integrativa applicata all'errore nel tempo, per ottenere il
contributo di correzione statica che uguaglia perfettamente il comando con la risposta. Questa azione è
particolarmente importante per compensare automaticamente lo sbilanciamento di una servovalvola.
Un’ azione integrativa eccessiva può causare delle oscillazioni della risposta. Il valore impostato di
contributo I definisce il tempo di integrazione dell’errore. Per questo motivo quanto più è piccolo il
valore di I tanto più elevato è il contributo di integrazione.
RT3: Manuale Operativo – gennaio 2008
-9-
Il guadagno D è costituito dalla derivata dell’errore; esso aumenta la velocità di risposta alle brusche
variazioni e contemporaneamente serve a ridurre i problemi di instabilità del sistema. Essendo il
guadagno derivativo molto sensibile ai disturbi del canale di retroazione, è importante utilizzare valori
di guadagno bassi, al fine di innescare pericolose oscillazioni.
Si possono verificare talvolta situazioni nelle quali non è possibile alzare troppo il guadagno
proporzionale perché il sistema diventa fortemente instabile. È il caso di prove ad alta frequenza, in cui
si desidera che il controllore sia particolarmente reattivo. In questo caso si impiega il guadagno
Feed-Foreward, che moltiplicato per la derivata del comando è quindi sommato al comando della
servovalvola.
RT3: Manuale Operativo – gennaio 2008
- 10 -
4 Caratteristiche del sistema di controllo RT3
Verranno di seguito esposte le caratteristiche tecniche hardware e software del sistema di controllo RT3.
- schede di acquisizione e generazione con risoluzione 16 bit o 18 bit (selezionabile in fase d’ordine);
- frequenza di aggiornamento tipica del PID loop di 2 kHz (è comunque possibile aumentare la
frequenza selezionando dei processori più performanti);
- i condizionatori dei trasduttori sono completamente gestiti via software;
- acquisizione dati fino ad una frequenza di 4 kHz;
- da uno a quattro canali di controllo nella versione base; è possibile aumentare il numero di canali di
controllo aggiungendo le unità periferiche RT3;
- sedici canali di acquisizione (espandibili a 30 come opzione); è possibile aumentare il numero di
canali di acquisizione aggiungendo le unità periferiche RT3;
- gestione della centrale idraulica: off-low-high;
- gestione del manifold: off-low-high.
- possibilità di gestione di manifold con regolazione proporzionale della pressione (opzione);
- possibilità di configurazione del sistema in funzione della tipologia del circuito idraulico: con e senza
pompa e manifold;
- pulsante di emergenza sul pannello frontale e predisposizione per contatti esterni di emergenza;
- gestione del generatore di funzioni avvio - pausa - stop con soft start e stop;
- funzioni integrate di setpoint rate e span rate;
- funzione di conteggio dei cicli eseguiti per l’arresto del generatore di funzioni e lo spegnimento
dell’idraulica;
- visualizzazione delle grandezze caratteristiche in forma grafica e numerica, direttamente in unità
ingegneristiche;
- generatore di funzioni: definizione della forma d’onda (sinusoidale, triangolare, quadra, esterna,
arbitraria, rampa), della frequenza, ampiezza, numero di cicli da
eseguire;
nel caso di sistema multicanale è possibile definire generatori di funzione distinti per ciascun
attuatore oppure onde comuni con ampiezza e fase programmati per ciascun canale;
- selezione della modalità di controreazione con commutazione dinamica della grandezza controllata;
- definizione dei parametri PIDF per ogni modalità di controllo, come pure dei limiti massimo e
minimo dei segnali di comando alla servovalvola;
- definizione del segnale di Delta-P per la compensazione della risonanza della colonna d’olio, con
regolazione del corrispondente guadagno ed impostazione della banda di frequenza;
- regolazione del segnale di dither per eliminare l’attrito di primo distacco della servovalvola, con
selezione della relativa frequenza;
- funzioni automatiche di controllo d’ampiezza ( e fase per sistemi multicanale);
- oscilloscopio ed analizzatore di spettro integrati;
- visualizzazione dello stato delle protezioni con definizione dei valori di soglia (limiti) e della
corrispondente azione (segnalazione, interlock, pausa, posizionamento predefinito);
- Taratura delle catene di misura con definizione dei trasduttori e delle corrispondenti unità
ingegneristiche; azzeramento e tara dei segnali anche se impiegati per controreazione;
- impostazione della polarità delle servovalvole;
- possibilità di gestire servovalvole a due o a tre stadi (in questo caso l’inner-loop è completamente
gestito dal controllore RT3);
RT3: Manuale Operativo – gennaio 2008
- 11 -
- possibilità di connessione di segnali esterni per controreazione e/o per acquisizione;
- possibilità di acquisizione e controreazione di segnali provenienti da encoder (opzionale);
- funzione integrata di controreazione di una grandezza con limitazione automatica di una seconda
grandezza (questa modalità è particolarmente importante nelle fasi di allestimento della prova, ove è
possibile controllare gli attuatori in corsa con limitazione automatica della forza esercitata).
Tutte le misure sono eseguite compensando automaticamente la curva di calibrazione del
corrispondente trasduttore senza la tradizionale limitazione posta dalla retta di “best-fit”.
Come opzione, è possibile eseguire test di simulazione riproducendo dei segnali temporali
registrati sul campione in condizioni operative reali, compensando dinamicamente la funzione di
trasferimento del sistema.
Il sistema di controllo RT3 può essere corredato con applicativi software realizzati per l’esecuzione di
test nei seguenti settori:
- prove materiali (trazione, compressione, flessione, fatica oligociclica, LCF, HCF..);
- prove di fatica su componenti;
- fatica termomeccanica;
- simulazione sismica;
- sweep sine;
- test specifici del settore geotecnico;
- riproduzione di profili di carico tipici del settore aeronautico;
- test di simulazione per la riproduzione controllata di sollecitazioni misurate su componenti, con
compensazione della funzione di trasferimento del sistema.
Trio Sistemi e Misure è in grado di sviluppare sistemi di controllo e applicativi software su
specifiche del cliente, per la realizzazione di macchine di prova speciali.
RT3 è già impiegato con successo dai più importanti laboratori del panorama italiano, in ambito
universitario ed industriale.
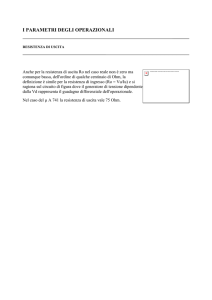
Figura 4: Pannello principale di controllo nella versione bicanale
RT3: Manuale Operativo – gennaio 2008
- 12 -
5 Composizione tipica del sistema di controllo RT3
5.1 Controllore RT3
Il controllore RT3 nella versione base può essere configurato in funzione delle specifiche funzioni
richieste per la gestione di un sistema di prova, con le seguenti caratteristiche:
- fino a n. 12 canali di misura costituiti in alternativa da:
- condizionatori per trasduttori tipo a ponte estensimetrico;
- condizionatori per trasduttori tipo lvdt;
- condizionatori per trasduttori potenziometrici;
- segnali amplificati esternamente con alimentazione del trasduttore fornita da RT3;
- fino a 18 canali ausiliari per il collegamento di segnali esterni impiegati per acquisizione,
controreazione o comando per il loop di controllo; il range di questi segnali è compreso tra -10 e +10 v.
- fino a 12 canali per il monitoraggio dei segnali ad alto livello in uscita dai condizionatori;
- fino a 4 canali per il comando dei sistemi di attuazione, costituiti da:
- segnali in corrente per il pilotaggio di servovalvole;
- segnali in tensione nel range +/- 10 V per il pilotaggio di valvole proporzionali o servomotori;
- interfacciamento con il circuito di gestione della centrale idraulica;
- interfacciamento con il circuito di gestione del manifold oleodinamico oppure l’azionamento di
un motore elettrico;
- collegamento di dispositivi esterni di interruzione d’emergenza;
- segnali ausiliari digitali di ingresso e uscita per configurazioni speciali.
Il controllore RT3 è gestito da un applicativo software real-time che risiede nella sua memoria ed è
interfacciato al personal computer di gestione tramite un link ethernet.
RT3: Manuale Operativo – gennaio 2008
- 13 -
5.2 Personal Computer
Il personal computer è configurato tipicamente con un processore Intel o AMD con frequenza allo stato
dell’arte nel momento dell’assemblaggio e con sistema operativo Windows XP Professional. Le altre
caratteristiche del personal computer possono variare di volta in volta in funzione delle esigenze del
cliente finale o della disponibilità di mercato. Il controllore RT3 è interfacciato con il personal computer
tramite una connessione di rete ethernet.
Il sistema operativo deve essere configurato impiegando come separatore decimale il punto.
La configurazione del protocollo di comunicazione del PC con RT3 non deve essere in alcun modo
variata. Qualora dovesse essere necessaria la connessione del pc alla rete aziendale, è necessario
installare e configurare una scheda di rete supplementare. Si richiede particolare attenzione
all’installazione di applicativi software aggiuntivi e alla modifica di configurazione, per non sottrarre
risorse necessarie al corretto funzionamento del sistema di controllo RT3. Sul pc è installato un
applicativo software che interfacciandosi con RT3 ne permette la configurazione, la gestione,
l’interfaccia utente e il salvataggio dei dati.
RT3: Manuale Operativo – gennaio 2008
- 14 -
6 Descrizione del software di gestione del sistema di controllo RT3
Il programma di controllo del sistema RT3 permette la gestione completa dell’apparecchiatura di prova,
l’impostazione dei parametri di configurazione ottimali, l’esecuzione dei test, la misura e la
registrazione dei dati. La maschera principale che è sempre attiva è la seguente:
Figura 5: Pannello di controllo
L’aspetto della maschera può variare in funzione del numero di canali di controllo attivati e della
configurazione idraulica o elettromeccanica.
Sono presenti dei controlli ed indicatori che saranno illustrati in seguito; mediante i menu a tendina
posizionati nella barra superiore è possibile aprire le varie maschere relative ai parametri di
configurazione e di test.
Set Point
Con questo comando è possibile impostare il valore statico di riferimento per il canale di controllo. Il
valore qui definito è raggiunto con una rampa la cui pendenza dipende dal valore di "Set point rate"
assegnato per la modalità di controllo attualmente in uso.
Retroazione
Indicatore del valore della grandezza controllata per il corrispondente canale di controllo.
Modalità di controllo
Menu a tendina per la selezione della grandezza di controllo del relativo canale; la modalità di controllo
può essere variata anche con idraulica attivata, con commutazione di tipo bumpless.
Interlock
Led che indica lo stato attuale di interlock (arresto idraulica):
Rosso: interlock inserito, non si ha quindi il consenso per l'accensione dell'idraulica o del motore.
L’interlock è attivo quando si supera un limite programmato oppure quando il segnale di controreazione
è in saturazione.
Verde: interlock disinserito, è possibile attivare l'idraulica o l’azionamento del motore elettrico.
RT3: Manuale Operativo – gennaio 2008
- 15 -
Stato Limiti
Led che indica lo stato dei limiti impostati:
Rosso: segnala che un limite è stato superato.
Verde: i limiti attivi non sono superati.
Reset
Pulsante per cancellare la segnalazione di avvenuto superamento di un limite.
Pompa
Bassa: accensione della pompa in bassa pressione; quando non è presente il manifold, il valore di
setpoint viene impostato automaticamente uguale al valore attuale della grandezza di controreazione
definita nella modalità di controllo.
Alta: attivazione dello stato di alta pressione.
Manifold
Bassa: attivazione del manifold in bassa pressione con pressione idraulica connessa agli attuatori; il
valore di setpoint viene impostato automaticamente uguale al valore attuale della grandezza di
controreazione definita nella modalità di controllo. In questo modo, l’errore viene annullato.
Alta: attivazione dello stato di alta pressione.
Arresto
Pulsante per fermare istantaneamente manifold e pompa; per le normali operazioni di spegnimento è
preferibile fermare prima manifold e poi pompa in modo sequenziale.
DEFINIZIONE DEI MENU A TENDINA
Sono riassunte brevemente le voci dei menu a tendina; successivamente saranno approfondite le parti
più significative:
- File
- Salva: salvataggio della configurazione di prova per il successivo avvio del programma.
- Salva con nome: salvataggio su file della configurazione attuale di prova.
- Richiama: carica da file una configurazione di prova.
- Abilita funzioni protette: abilita l’impostazione dei parametri per i condizionatori di segnale.
- Nomi canali di controllo: permette di definire il nome dei canali di controllo.
- Uscita: chiusura del programma; è attivo solo a idraulica spenta.
- Controllo
- Parametri PID: definizione dei guadagni dei loop di controllo.
- Servovalvola: definizione dei parametri specifici delle servovalvole.
- Parametri compensazione deltaP.
- Controllo Ch limited Ch: impostazione della modalità di controllo Ch limited Ch.
- Definizione modalità di controllo: impostazione dei canali associati alle modalità di controllo.
- Definizione canali di acquisizione.
- Assegnazione trasduttori: associazione delle curve di calibrazione dei trasduttori ai canali.
- Definizione canale calcolato: definizione dei parametri specifici per il canale calcolato.
- Limiti
RT3: Manuale Operativo – gennaio 2008
- 16 -
- Valori: definizione dei valori dei limiti e delle azioni.
- Log file: visualizzazione del file di memorizzazione degli eventi.
- Trasduttori
- Azzeramento.
- Definizione sensori.
- Condizionatori: definizione dei parametri caratteristici di condizionamento.
- Visualizzazione
- Oscilloscopio.
- Oscilloscopio multitraccia.
- Indicatori digitali.
- Controllo
- Acquisizione.
- Fatica.
- Visualizzazione files acquisiti.
- Generatore
- Posizionamento.
- Generatore.
- Imposta guadagni controllo di ampiezza.
- Generatore step.
- Definizione profilo a step.
- Impostazione n° cicli.
- Profilo arbitrario.
- Profilo ampiezza variabile.
- Help
- Guida in linea
- Info
RT3: Manuale Operativo – gennaio 2008
- 17 -
6.1 Parametri PID
Figura 6: Parametri controllore PID
Guadagno proporzionale
Guadagno proporzionale del loop di controllo.
Guadagno integrale
Guadagno integrativo del loop di controllo.
Guadagno derivativo
Guadagno derivativo del loop di controllo.
Set Point Rate [%/sec.]
È il gradiente di variazione del valore di setpoint comandato al loop di controllo PID. Esso è espresso in
percentuale al secondo perchè riferito al fondoscala del sensore utilizzato come controreazione.
Esempio:
Stiamo controreazionando in spostamento con un sensore di fondoscala 100 [mm]; se imponiamo uno
Span Rate di 10 [%/s] tutte le variazioni di setpoint avverranno con un gradiente di 10 [mm/s]. Il
passaggio da un valore di setpoint di 10 [mm] ad un valore di setpoint di 50 [mm] non sarà istantaneo
ma avverrà in 4 [s].
Il Set point rate permette dunque di graduare il valore di setpoint evitando bruschi movimenti
dell’attuatore.
Canale di controllo
Selezione del canale di controllo.
RT3: Manuale Operativo – gennaio 2008
- 18 -
Modalità di controllo
Consente di selezionare la modalità di controllo tra quelle definite per il canale abilitato. Le modifiche
dei parametri del controllore sono relative alla sola modalità selezionata.
Frequenza di taglio filtro passabasso su comando [Hz]
Valore della frequenza di taglio del filtro passabasso sul comando della servovalvola; se si imposta una
frequenza = 0 il filtro è disattivato. Questo filtro è attivato quando si vuole evitare che i disturbi sul
canale di retroazione si propaghino come comando alla servovalvola.
Guadagno Feed-foreward
La derivata del comando è moltiplicata per questo guadagno prima di essere sommata all'uscita
dell'anello di controllo PID per costituire il comando alla servovalvola.
Frequenza di taglio filtro passa alto feed-foreward [Hz]
Il segnale di feed-foreward è filtrato passa-alto prima di essere sommato all’uscita dell’algoritmo PID.
Figura 7: Parametri controllore PID - Filtro Feed-Foreward
RT3: Manuale Operativo – gennaio 2008
- 19 -
6.2 Servovalvola
Figura 8: Parametri generici servovalvola
Limite comando servovalvola [%]
Limite al comando della servovalvola, espresso in percentuale rispetto al valore massimo.
Modificando questo valore si limita l’apertura della servovalvola, quindi il flusso d’olio e la velocità
dell’attuatore.
Polarità
Selezione della polarità del segnale di comando della servovalvola (la commutazione è possibile solo a
idraulica spenta).
Bilanciamento servovalvola
Valore che viene sommato all'uscita del controllore PID prima di essere inviato come comando alla
servovalvola. Modificando questo parametro si possono correggere eventuali sbilanciamenti.
Ampiezza dither
Ampiezza in volt della vibrazione che viene sommata al comando valvola per ridurre l'attrito di primo
distacco della spoletta della servovalvola.
Frequenza dither
Menu a tendina per la selezione della frequenza del segnale dither.
Canale di controllo
Selezione del canale di controllo.
RT3: Manuale Operativo – gennaio 2008
- 20 -
Nel caso di servovalvole a triplo stadio è attiva anche la maschera rappresentata in figura 9, dove sono
regolati i parametri di controllo dell’Inner Loop
Guadagno proporzionale
Gudagno proporzionale per il controllo di posizione della spoletta della servovalvola.
Tempo derivativo
Guadagno derivativo per il controllo di posizione della spoletta della servovalvola.
Figura 9: Parametri servovalvola - Triplostadio
Polarità Innerloop
Selettore per definire la polarità del loop di controllo dello spool della valvola.
Canale di spool valvola
Si seleziona il canale al quale è collegato il trasduttore di posizione dello spool della valvola.
Stato controllo triplostadio
Selettore per attivare o disattivare la gestione di una servovalvola a triplo stadio.
RT3: Manuale Operativo – gennaio 2008
- 21 -
6.3 Channel limit channel
Questa maschera consente di creare una nuova modalità che è impiegata tipicamente nelle fasi di
preparazione della prova. In questo modo è possibile commutare da una modalità primaria ad una
secondaria (Modalità di controllo limite) nel momento in cui vengono superati i limiti impostati. È
necessario che entrambe le modalità primaria e secondaria siano state precedentemente definite.
Esempio: quando si manovra un attuatore in controllo di posizione e si incontra un ostacolo, si rischia di
esercitare la massima forza disponibile e di danneggiare il campione in prova; per contro, operando in
controllo di forza un attuatore libero, è difficile regolarne la posizione e la velocità, con i conseguenti
problemi al contatto dovuti all’inerzia. Con la modalità Channel limit channel è possibile per esempio
manovrare l’attuatore in controllo di posizione con la limitazione automatica della forza esercitata.
Con riferimento all’esempio la modalità primaria è spostamento e quella limite forza; i limiti sono
definiti in forza. I guadagni sono generalmente più bassi rispetto a quelli assegnati ai distinti PID.
In questo modo è consentito all’operatore di manovrare in condizioni di maggior cautela, con
l’accortezza di impostare sempre e comunque i limiti di sicurezza (arresto manifold o interlock).
Figura 10: Parametri channel limit channel – Modalità di controllo primario e Modalità di controllo limite
Guadagno proporzionale primario
Guadagno proporzionale per la modalità di controllo primaria.
Modalità controllo primaria
Menu a tendina per la scelta della modalità di controllo primaria.
Crea modalità Ch Lim. Ch
I parametri impostati sono attivati e la modalità di controllo è selezionabile dalla maschera principale.
RT3: Manuale Operativo – gennaio 2008
- 22 -
Guadagno proporzionale limite
Guadagno proporzionale per la modalità di controllo limite.
Modalità controllo limite
Menu a tendina per la scelta della modalità di controllo limite; nel caso in cui i limiti superiore o
inferiore impostati per il trasduttore associato a questa modalità siano superati, il controllore commuta
automaticamente modalità di controllo passando da quella primaria a quella limite per mantenere come
setpoint il valore del limite superato, evitando in questo modo di danneggiare il campione.
Limite superiore
Il canale è retroazionato nella modalità di controllo primaria ma se viene raggiunto il limite superiore
della grandezza limite il sistema commuta automaticamente nella modalità di controllo limite
contenendone il valore. Quando la grandezza limite ritorna al di sotto della soglia, il sistema commuta di
nuovo nella modalità di controllo primaria.
Un esempio tipico si ha quando si opera in controllo di corsa con il limite di carico dove l’attuatore in
battuta limita automaticamente il carico ai valori definiti.
Limite inferiore
Il canale è retroazionato nella modalità di controllo primaria ma se viene raggiunto il limite inferiore
della grandezza limite il sistema commuta automaticamente nella modalità di controllo limite
contenendone il valore. Quando la grandezza limite ritorna al di sopra della soglia, il sistema commuta
di nuovo nella modalità di controllo primaria.
Tasto –
Tasto per diminuire il numero dei decimali nell'impostazione dei limiti superiore e inferiore.
Tasto +
Tasto per aumentare il numero dei decimali nell'impostazione dei limiti superiore e inferiore.
Canale di Controllo
Selezione del canale di controllo.
RT3: Manuale Operativo – gennaio 2008
- 23 -
6.4 Definizione modalità di controllo
Figura 11: Definizione modalità di controllo
Con questa maschera è possibile definire le modalità di controllo per gli attuatori, definendone il nome
ed associando il trasduttore di controreazione. E’ possibile inoltre eliminare una modalità di controllo
precedentemente definita.
Selezione canale di controllo
Selettore del canale di controllo per il quale si vuole definire un nuova modalità.
Nome modalità
Selettore per la selezione delle modalità già definite per il canale di controllo selezionato. In questo
modo vengono richiamati i parametri associati alla modalità selezionata.
Nome nuova modalità
In questo campo va inserito il nome della nuova modalità di controllo che si vuole creare
Canale di retroazione
Selettore per la scelta del canale di controreazione che si vuole associare alla nuova modalità di
controllo.
Crea modalità
Tasto per creare e memorizzare la nuova modalità di controllo definita.
RT3: Manuale Operativo – gennaio 2008
- 24 -
Quando si crea una nuova modalità di controllo, sono automaticamente impostati i seguenti valori:
1.
2.
3.
4.
5.
Limite comando servovalvola: 100%
Guadagno proporzionale P: 1
Guadagno integrativo I: 0
Guadagno derivativo D: 0
Setpoint rate: 10
I valori inizialmente impostati possono naturalmente essere modificati accedendo alle corrispondenti
maschere.
Modifica modalità
Consente di modificare la modalità selezionata.
Elimina modalità
Consente di eliminare la modalità selezionata.
RT3: Manuale Operativo – gennaio 2008
- 25 -
6.5 Definizione canali di acquisizione
Con questa maschera è possibile definire nella colonna destra i segnali di acquisizione a partire dai
segnali disponibili riportati nella colonna sinistra.
Selezionare dall’elenco di sinistra il nuovo segnale, cliccare sull’elenco destro nel punto in cui si vuole
inserire il nuovo canale e quindi premere il pulsante “Seleziona canale”.
È possibile operare una scelta multipla dei segnali tenendo premuto il tasto Shift della tastiera.
Per eliminare un canale, selezionarlo dall’elenco di destra e quindi premere il pulsante “Elimina canale”.
I canali selezionati saranno presenti nelle maschere di visualizzazione e nella selezione dei limiti.
Figura 12: Definizione dei canali di acquisizione
RT3: Manuale Operativo – gennaio 2008
- 26 -
6.6 Assegnazione trasduttori
Mediante questa maschera è possibile associare la curva di calibrazione precedentemente definita per un
trasduttore, alla risorsa hardware di acquisizione del controllore RT3.
Nella tabella superiore sono riportati i dati dei sensori presenti nel database, mentre la tabella inferiore
elenca le risorse hardware con i trasduttori attualmente corrispondenti.
Per associare un sensore ad un canale cliccare sulla corrispondenza nella tabella superiore, quindi
definire la risorsa hardware con il selettore a destra. Le selezioni indicate sono confermate premendo il
pulsante “Abilita nuovo sensore”.
Se si desidera che ad una certa risorsa hardware non sia collegato alcun sensore, dopo averla selezionata
premere il pulsante “Canale scollegato”.
Figura 13: Assegnazione trasduttori ai canali acquisiti
Nella tabella superiore si trovano tutti i sensori presenti nel database. Nuovi sensori possono essere
definiti utilizzando la maschera "Definizione sensori" di seguito spiegata.
Nelle quattro colonne si trovano:
-
il codice identificativo con cui è stato definito il sensore;
il tipo di sensore ( parametro definito nella maschera di definizione sensori);
la costante di taratura ottenuta come best fit dalla curva di calibrazione k [UI/V];
l’unità ingegneristica del sensore.
RT3: Manuale Operativo – gennaio 2008
- 27 -
6.7 Definizione canale calcolato
Con questa maschera è possibile definire la misura di forza per attuatori ad area differenziale,
impiegando due trasduttori di pressione distinti.
Nei relativi campi si selezionano i trasduttori di pressione presenti nel database, le aree dell’attuatore e
le unità di misura. La definizione è poi confermata o eliminata con i relativi pulsanti.
Unità di misura canale calcolato
Selezione dell’unità di misura impiegata per la visualizzazione del carico calcolato, sulla base dei
parametri definiti. Il carico viene calcolato risolvendo l'equazione di equilibrio:
Forza = Pressione(A) * Area(A) – Pressione (B) * Area(B)
Figura 14: Definizione carico calcolato
RT3: Manuale Operativo – gennaio 2008
- 28 -
6.8 Definizione limiti
Con questa maschera è possibile definire e attivare i limiti per ciascuna delle grandezze acquisite.
Stato
Indicazione dello stato del limite (il colore rosso significa che il limite è stato superato)
Canale
Nome del sensore associato al canale; tra parentesi quadre è riportata l'unità ingegneristica.
Limite Superiore
Limite superiore definito in unità ingegneristiche. Nel caso di superamento lo stato diventa “Fault”, si
accende il led rosso a fianco del nome del canale e si attua l’azione selezionata nel menu a tendina.
Limite Inferiore
Limite inferiore definito in unità ingegneristiche. Nel caso di superamento lo stato diventa “Fault”, si
accende il led rosso a fianco del nome del canale e si attua l’azione selezionata nel menu a tendina.
Azione limite
È l’azione attuata al superamento del valore limite imposto. Sono selezionabili le seguenti azioni:
- Disabilitato: i limiti del canale non sono attivi.
- Segnalazione: i limiti del canale sono attivi e quando vengono superati appare solo una
segnalazione visiva.
- Hold valore generato: i limiti sono attivi e quando vengono superati il generatore di funzioni è
arrestato al livello in cui si trova.
- Cambio modalità + rampa: i limiti sono attivi e quando vengono superati il generatore di funzioni
è arrestato; si passa alla modalità di controllo selezionata dal menu a tendina e con una rampa si
raggiunge il valore di setpoint impostato nell’apposita casella (SetPoint dopo commutazione).
- Arresto manifold: quando i limiti sono superati viene spento il manifold; questa condizione non è
attiva nel caso di configurazione idraulica senza il manifold.
- Interlock: se sono superati i limiti è disattivato il circuito idraulico (pompa e manifold).
RT3: Manuale Operativo – gennaio 2008
- 29 -
Figura 15: Definizione limiti
RT3: Manuale Operativo – gennaio 2008
- 30 -
6.9 Azzeramento dei trasduttori
Figura 16: Azzeramento dei trasduttori
Azzera canale
Pulsante per azzerare il valore del canale selezionato.
Questa operazione è attiva anche per il canale impiegato come controreazione.
Rimuovi offset canale
Pulsante per rimuovere l'offset del canale selezionato.
Questa operazione è attiva anche per il canale impiegato come controreazione.
Selezione canale
Selettore del canale da azzerare.
Canale modificato da offset
Indicatore della presenza o meno di offset per il canale selezionato.
Valore da imporre [ UI ]
Valore di tara che sarà imposto al canale selezionato una volta premuto il tasto IMPONI VALORE
Valore offset da imporre
Con questa funzione, la lettura attuale del trasduttore diventerà uguale al valore offset da imporre;
il programma calcolerà automaticamente il valore di tara per il trasduttore.
Imponi valore
Tasto di impostazione del valore in unità ingegneristiche a fianco specificato.
Imponi offset
Tasto di applicazione dell'offset da imporre specificato.
Se il canale selezionato è già modificato con un offset, il valore imposto sarà sommato a quello già
presente.
RT3: Manuale Operativo – gennaio 2008
- 31 -
6.10 Definizione sensori
Figura 17: Definizione sensori
Con questa maschera è possibile definire l’anagrafica dei nuovi sensori che saranno calibrati premendo
il pulsante “Calibrazione”.
Nella tabella sono riportate le caratteristiche di tutti i sensori attualmente presenti nel database.
E’ possibile inoltre rimuovere sensori dal database, facendo attenzione che non siano impiegati nella
configurazione attuale del sistema di controllo RT3.
Mediante il tasto Calibrazione si apre la maschera che consente la definizione o il caricamento della
curva di calibrazione del trasduttore.
Con il sistema di controllo RT3 tutte le misure sono eseguite compensando automaticamente la curva di
calibrazione del corrispondente trasduttore, senza la tradizionale limitazione posta dalla retta di “bestfit”. La curva di calibrazione è costituita da una linea spezzata che unisce tutti i punti che vengono
inseriti. Pertanto, più punti si inseriscono più precisa sarà la trasformazione in unità ingegneristiche.
Questo aspetto deve essere curato in particolar modo per quei trasduttori che hanno scostamenti dalla
linearità, pur essendo ripetibili.
RT3: Manuale Operativo – gennaio 2008
- 32 -
Figura 18: Calibrazione trasduttori
Nel grafico sono rappresentati i punti di calibrazione elencati nella tabella e definiti in due modi
alternativi:
- leggendo il segnale in volt dal canale di acquisizione selezionato;
- impostando manualmente i punti per i trasduttori dei quali sono già noti i valori di taratura.
Una volta definiti i punti di calibrazione (almeno quattro) premere i pulsanti “accetta calibrazione” e
quindi “salva”.
Carica curva da file
Permette di richiamare i punti di una curva di calibrazione salvata su file, definita come testo con
colonne delimitate da tabulazione.
La prima colonna deve contenere i valori in UI della curva, la seconda i valori in V.
Il primo elemento della prima colonna deve essere l’unità ingegneristica racchiusa tra parentesi quadre;
Il primo elemento della seconda colonna deve essere l’unità in Volt racchiusa tra parentesi quadre;
Esempio:
[mm]
[V]
2.2
1
4.35
2
6.6
3
RT3: Manuale Operativo – gennaio 2008
- 33 -
6.11 Condizionatori
Figura 19: Condizionatori
L’accesso a questa maschera è consentito solo dopo avere immesso la password per le funzioni protette.
I condizionatori di segnale possono essere di tipo:
AC: con alimentazione del trasduttore in corrente alternata specifici per i trasduttori di spostamento lvdt;
DC: con alimentazione del trasduttore in corrente continua, per trasduttori a ponte estensimetrico, come
le celle di carico e gli estensometri.
Mediante questa maschera è possibile definire i parametri caratteristici del condizionatore.
RT3: Manuale Operativo – gennaio 2008
- 34 -
6.12 Oscilloscopio
Figura 20: Oscilloscopio
Questa maschera permette di visualizzare le diverse grandezze del sistema di controllo RT3. Utilizzando
i due selettori a tendina posti nella parte inferiore della maschera, si selezionano le grandezze
rappresentate nel grafico.
Con il primo selettore si associa una grandezza alla traccia verde di sinistra mentre con il secondo si
associa la grandezza alla traccia rossa di destra. Su i sue lati del grafico sono riportate le scale delle
corrispondenti grandezze, alla sinistra per a traccia verde e alla destra per quella rossa, come indicato dai
led in alto.
Pausa: blocca la visualizzazione attuale del grafico.
FFT: permette la visualizzazione nel dominio della frequenza delle grandezze selezionate;
FFT significa Fast Fourier Transform ; il campo di frequenza dipende dalla finestra temporale
selezionata per il grafico nel tempo.
Mostra medie
Consente di visualizzare nella parte inferiore della finestra il valore numerico mediato delle grandezze
selezionate; la durata temporale per la quale è calcolata la media corrisponde alla traccia x del grafico.
RT3: Manuale Operativo – gennaio 2008
- 35 -
Verde-> Rossa
I parametri attualmente impostati per la traccia verde di sinistra sono automaticamente impostati anche
per la traccia rossa di destra; questa funzione è utilizzata per confrontare due segnali impiegando la
stessa scala.
Rossa -> Verde
I parametri attualmente impostati per la traccia rossa di destra sono automaticamente impostati anche
per la traccia verde di sinistra; questa funzione è utilizzata per confrontare due segnali impiegando la
stessa scala.
Dalla barra dei menu a tendina è possibile scegliere la lunghezza temporale della finestra e la velocità di
aggiornamento del grafico. Ad una finestra temporale di un secondo corrisponde una frequenza di
campionamento di 2000Hz, mentre per la finestra temporale di quaranta secondi la frequenza di
campionamento è di 50 Hz.
RT3: Manuale Operativo – gennaio 2008
- 36 -
6.13 Oscilloscopio multitraccia
Questa maschera permette di visualizzare contemporaneamente diverse grandezze acquisite,
impostandole con i selettori a tendina posti alla destra del grafico.
Una volta selezionato il canale, se ne può abilitare la visualizzazione ciccando sulla casella a sinistra del
corrispondente menu a tendina. Il colore della traccia è quello alla destra della grandezza selezionata.
Con il tasto “Pausa” è possibile bloccare l’aggiornamento del grafico; premendo una seconda volta si
ritorna alla visualizzazione corrente in funzione del tempo. La dimensione della finestra e regolabile a
piacere, ciccando e trascinando lo spigolo inferiore sinistro.
Questa maschera deve essere impiegata per visualizzare fenomeni lenti a causa dei valori selezionabili
per la lunghezza della finestra. Eventuali fenomeni di breve durata non potrebbero essere rappresentati
in modo corretto; in tal caso si raccomanda di usare la maschera Oscilloscopio.
Figura 21: Oscilloscopio multitraccia
RT3: Manuale Operativo – gennaio 2008
- 37 -
6.14
Indicatori digitali
Figura 22: Indicatori digitali
Sono riportati i valori attuali oppure i valori massimo e minimo delle grandezze selezionate.
Con il pulsante di Reset si cancellano i valori di massimo e minimo raffigurati.
Figura 23: Indicatori digitali - Max e Min
Con le voci dei menu a tendina è possibile:
- selezionare il numero di indicatori digitali;
- selezionare la dimensione degli indicatori digitali raffigurati.
La rappresentazione dei valori di picco e valle nel corso di prove cicliche è eseguita nella maschera
dei test di fatica.
RT3: Manuale Operativo – gennaio 2008
- 38 -
6.15
Acquisizione
Figura 24: Acquisizione - Grafico
La maschera di acquisizione permette di registrare su disco le grandezze caratteristiche di prova, in
formato ASCII compatibile con i comuni programmi di foglio elettronico ed analisi. La maschera è
suddivisa in due paragrafi: Grafico e Parametri di acquisizione.
Nel primo paragrafo (fig. 24) sono raffigurati due grafici: il primo in alto rappresenta la grandezza
selezionata in funzione del tempo mentre il secondo raffigura le tracce in formato XY.
RT3: Manuale Operativo – gennaio 2008
- 39 -
Nel secondo paragrafo (fig. 25) si impostano i parametri di acquisizione.
Figura 25: Acquisizione - Parametri
Frequenza di campionamento [Hz]
Indica la frequenza a cui sono campionati i dati durante l’acquisizione; ad esempio se si acquisisce
a 50 Hz, ogni secondo saranno registrati 50 punti.
Durata acquisizione [s]
Indica la durata dell’acquisizione espressa in secondi; se si imposta 0 l'acquisizione continuerà fino
all'arresto manuale.
Ultimo file acquisito
Indicatore del file selezionato per l’acquisizione.
Numero di punti grafico XY
Indica il numero di punti che sono rappresentati nel grafico XY nella parte bassa della maschera.
Frequenza grafico XY
RT3: Manuale Operativo – gennaio 2008
- 40 -
Indica la frequenza di campionamento con la quale sono rappresentati i dati nel grafico XY.
File dati
Tasto che permette di accedere alla maschera di definizione del file per il salvataggio dei dati.
Avvio acquisizione
Tasto per l’avvio e l’arresto manuale dell’acquisizione; normalmente l’acquisizione termina allo scadere
della durata definita, a meno che non si prema in anticipo il pulsante di stop.
Avvio acquisizione da generatore
Con questa casella selezionata, l’acquisizione dati sarà iniziata automaticamente nel momento in cui si
avvia il generatore di funzioni.
Ricerca
Dato anagrafico della prova che comparirà nell’intestazione del file acquisito.
Cliente
Dato anagrafico della prova che comparirà nell’intestazione del file acquisito.
Nome tecnico
Dato anagrafico della prova che comparirà nell’intestazione del file acquisito.
Commento
Dato anagrafico della prova che comparirà nell’intestazione del file acquisito.
RT3: Manuale Operativo – gennaio 2008
- 41 -
6.16
Test Fatica
Figura 26: Test fatica - Grafico
La maschera Test di Fatica permette di acquisire i dati durante una prova di fatica. Tipicamente in un
test di fatica di un componente meccanico non è necessario acquisire i dati durante il corso di tutta la
prova, ma si desidera salvare i dati ad intervalli regolari.
La maschera è suddivisa in quattro paragrafi:
- Grafico
- Parametri di acquisizione.
- Intervallo acquisizione
- Canali sottopicco
Nel primo paragrafo (fig. 26) sono rappresentati due grafici: quello nella parte superiore è in funzione
del tempo, mentre quello nella parte inferiore mostra i valori massimo e minimo della grandezza
selezionata in funzione del numero di cicli eseguiti
RT3: Manuale Operativo – gennaio 2008
- 42 -
Figura 27: Test fatica - Parametri
Nel secondo paragrafo, alla voce parametri di acquisizione è possibile impostare:
Frequenza di campionamento [Hz]
La frequenza alla quale sono campionati i dati durante l’acquisizione: se per esempio si acquisisce a 50
Hz, ogni secondo sono registrati 50 punti per ogni canale.
Numero di punti da acquisire
Si imposta il numero di punti che sono registrati per ogni evento di acquisizione. Nel caso in cui si
imposta una frequenza di campionamento di 50 Hz ed un numero di punti pari a 100, la durata
conseguente della registrazione su file sarà di 2 secondi.
Ultimo file acquisito
Indica il nome dell’ultimo file salvato su disco.
RT3: Manuale Operativo – gennaio 2008
- 43 -
Selezione cartella
Permette di definire la cartella di destinazione dei files acquisiti.
Generatore normale/Generatore step
Selettore che consente di scegliere il tipo di generatore che fornirà il conteggio cicli per il salvataggio
dei dati.
Acquisizione manuale
Pulsante per l’avvio manuale dell’acquisizione dati.
Avvio acquisizione
Tasto che predispone il programma all’acquisizione dati automatica.
Il generatore di funzioni fornisce il comando per la prova di fatica e ne conta i cicli. Ad intervalli
regolari, definiti secondo una scaletta programmata, avviene l’acquisizione dati. Ogni evento di
acquisizione è salvato su un file distinto, il cui nome è composto dal nome identificativo al quale è
aggiunto il numero di cicli corrispondente all’inizio dell’acquisizione. Per ogni file sono calcolati i
valori massimo e minimo di ciascun canale, che sono graficati in funzione del numero di cicli.
I valori massimo e minimo sono anche salvati su un file specifico, distinto dal nome identificativo di
prova.
Scrivi log file
Accede ad una maschera che permette di salvare dei commenti relativi alla prova in corso, identificati da
data, ora e cicli eseguiti.
Leggi log file
Accede alla maschera nella quale si possono leggere i commenti salvati, selezionandoli in base al
numero di cicli di prova.
Nome identificativo prova
Consente di specificare il nome che identifica la prova; questo nome è utilizzato per creare la radice dei
file dati salvati. Per ogni prova sono salvati su disco, nella cartella specificata, tre diversi tipi di file.
Supponiamo che il nome identificativo del test sia “prova” e la directory di salvataggio selezionata sia
c:/dati/. Al termine della prova, nella cartella si troveranno i seguenti files:
c:/dati/ prova__1583.dat:
c:/dati/ prova.rpt:
c:/dati/ prova.rvt:
questo file è la finestra temporale acquisita al ciclo 1583;
questo file contiene i valori massimo e minimo delle grandezze acquisite
in funzione del numero di cicli, avente come separatore decimale il punto;
questo file contiene i valori di massimo e minimo delle grandezze
acquisite in funzione del numero di cicli, con separatore decimale
costituito dalla virgola.
Ricerca
Dato anagrafico della prova che comparirà nell’intestazione del file acquisito.
Cliente
Dato anagrafico della prova che comparirà nell’intestazione del file acquisito.
RT3: Manuale Operativo – gennaio 2008
- 44 -
Nome tecnico
Dato anagrafico della prova che comparirà nell’intestazione del file acquisito.
Selezionando il paragrafo “Intervallo acquisizione” si può impostare la scaletta delle fasi di
registrazione dei dati. Fino al ciclo di prova corrispondente al valore definito come “N. ciclo cambio
intervallo”, l’intervallo di acquisizione espresso come numero di cicli di prova è quello impostato a
fianco nella tabella.
Con riferimento ai valori indicati nella figura 28, fino al ciclo di prova n. 500 sarà eseguita
un’acquisizione dati ogni 40 cicli di test. Da 500 a 10000 cicli di prova sarà eseguita un’acquisizione
ogni 150 cicli di prova.
Se non sono definiti altri intervalli, i dati saranno comunque salvati ad intervalli di 150 cicli fini al
termine del test.
Figura 28: Test fatica – Intervallo acquisizione
RT3: Manuale Operativo – gennaio 2008
- 45 -
Figura 29: Test fatica – Canali sottopicco
Selezionando il paragrafo “Canali sottopicco” è possibile definire i limiti per interrompere la prova
prima del collasso del campione. Se si esegue una prova in controllo di carico, quando il campione si
danneggia aumenta tipicamente la sua deformazione ed impostando i limiti massimo e minimo sulla
grandezza di deformazione si interrompe il test prima della rottura completa (talvolta si impiega anche
il trasduttore di corsa dell’attuatore per rilevare il cedimento del campione).
Quando invece si eseguono test in controllo di deformazione, il degrado del campione in prova si
manifesta tipicamente come una diminuzione della forza esercitata. Impiegando i limiti massimo e
minimo non sarebbe possibile interrompere la prova. Per questo motivo sono stati ideati i limiti di
sottopicco: ad ogni ciclo di prova, se i limiti sono attivati, si verifica il superamento dei valori Picco e
Valle. Il mancato superamento determina l’arresto del generatore di funzioni e la disattivazione della
potenza idraulica (se la funzione è attivata).
RT3: Manuale Operativo – gennaio 2008
- 46 -
Per identificare i valori di picco e valle misurati per ciascuna grandezza, è necessario definire il valore di
soglia di rilevazione. Se stiamo analizzando per esempio un segnale ciclico di forza con valori compresi
tra +10 e -10 kN ed un rumore di 0.1 kN, dobbiamo impostare un valore di soglia di rilevazione di circa
0.5 kN, altrimenti il sistema identificherebbe dei valori di picco e valle corrispondenti al rumore.
In altre parole il sistema RT3 legge continuamente i segnali alla frequenza di 2 kHz; ogni lettura viene
confrontata con la precedente e se è maggiore allora il valore massimo viene momentaneamente
identificato con l’ultima lettura. Se la nuova lettura è maggiore della prevedente allora il nuovo valore
massimo provvisorio viene aggiornato. Se la nuova lettura è minore, come possiamo essere sicuri che il
massimo provvisorio che abbiamo annotato corrisponda effettivamente al picco del ciclo? Solo dopo che
il segnale sarà sceso rispetto al massimo provvisorio di un valore corrispondente alla soglia di
rilevazione, allora potremo definire il massimo provvisorio come il picco del ciclo di prova.
In modo analogo viene rilevata la valle del ciclo. Si capisce quindi l’importanza dei corretti valori
impostati per le soglie di rilevazione, dipendenti dalla particolarità della prova e dai disturbi sui segnali
(di tipo elettrico ma anche indotti meccanicamente dallo stesso campione in prova).
Selezione canale limite underpeak
Selettore a tendina per la definizione del canale
Limite picco
Impostazione del valore di soglia superiore: il mancato superamento nel corso di un ciclo di prova
determina l’intervento del limite
Limite valle
Impostazione del valore di soglia inferiore: il mancato superamento nel corso di un ciclo di prova
determina l’intervento del limite
Attivazione
Attivazione o disattivazione del limite per l’interruzione della prova (stop generatore di funzioni)
Stato
Luce verde o rossa che indica lo stato del limite
Picco misurato
Picco misurato nel corso del ciclo, definito in unità ingegneristiche
Valle misurata
Valle misurata nel corso del ciclo, definita in unità ingegneristiche
Soglia di rilevazione picco valle
Intervallo necessario per la rilevazione corretta di picco e valle (vedi spiegazione precedente)
Reset stato
Pulsante per annullare la segnalazione di intervento del limite
Arresta idraulica ad intervento limite
Con questa funzione attivata, l’intervento del limite determina l’arresto dell’abilitazione idraulica.
RT3: Manuale Operativo – gennaio 2008
- 47 -
6.17 Visualizzazione dei files acquisiti
Figura 30: Visualizzazione - Grafico
Questa maschera consente di visualizzare i dati acquisiti e memorizzati su file. Tramite i primi due
selettori che si trovano sotto il grafico, si scelgono le grandezze da visualizzare sull’asse Y: la prima
traccia è quella verde e la seconda rossa, come indicato dalla casella a sinistra dei nomi dei canali.
Il terzo selettore consente di definire la grandezza associata all’asse X.
File dati
Nome del file visualizzato.
Richiama
Apre la finestra di dialogo per la scelta del file da visualizzare.
FFT
RT3: Manuale Operativo – gennaio 2008
- 48 -
Visualizza lo spettro di frequenze dei segnali acquisiti.
Uscita FFT
Consente di tornare alla visualizzazione iniziale.
Stampa
Stampa un rapporto con i dati della prova (data, ora, cliente, ricerca, tecnico, commento), ed il grafico
visualizzato.
Frequenza inferiore
Si seleziona la frequenza inferiore del filtro.
Frequenza superiore
Si seleziona la frequenza superiore del filtro.
Tipo filtro
Si può selezionare un filtro passa basso, passa alto, passa banda o stop banda.
Canale da filtrare
Selezione del canale da filtrare.
Filtra
Applica il filtro al canale selezionato.
Salva dati elaborati
Apre la finestra di dialogo per la definizione del file di salvataggio dei dati elaborati.
RT3: Manuale Operativo – gennaio 2008
- 49 -
Figura 31: Visualizzazione – Max / Min
Selezionando il tab Max/Min si passa al grafico di visualizzazione dei valori massimo e minimo
acquisiti durante l'intera prova di fatica. In questo caso quattro colori differenti consentono la lettura ed
il confronto dei massimi e minimi delle grandezze selezionate in funzione del numero di cicli di test.
RT3: Manuale Operativo – gennaio 2008
- 50 -
Figura 32: Visualizzazione – Parametri fatica
Nella figura 32 è rappresentato il paragrafo dove sono riassunti tutti i dati anagrafici relativi alla prova
di fatica.
RT3: Manuale Operativo – gennaio 2008
- 51 -
6.18 Posizionamento
Figura 33: Posizionamento attuatori
Questa maschera consente all’operatore di muovere e posizionare contemporaneamente gli attuatori
associati ai canali di controllo. Per sistemi monocanale la funzione è apparentemente inutile perché può
essere svolta dal setpoint. Quando invece si devono muovere contemporaneamente più attuatori per
assumere la condizione di inizio prova, si definisce il punto di arrivo e la modalità di controllo per
ciascun canale ed il tempo di rampa.
Questa modalità si è rivelata fondamentale per esempio in un applicazione con 25 attuatori, impiegati
per l’esecuzione di prove di fatica su un carrello ferroviario. All’attivazione del banco tutti gli attuatori
devono essere portati alla posizione predefinita di inizio profilo.
Nella tabella sono visualizzati tutti i canali di controllo: selezionandone uno, è possibile abilitarlo
tramite l’apposita casella.
È importante che la modalità di controllo visualizzata in questa maschera, sia quella selezionata nel
pannello di controllo: se si richiama un file che prevede una rampa in spostamento, ma l’attuatore è in
controllo di carico, la rampa non parte.
Un altro esempio di applicazione è il posizionamento di una tavola sostenuta da quattro attuatori;
muovere un pistone alla volta sarebbe problematico, mentre in questo modo la simultaneità consente di
mantenere la tavola su un piano parallelo a quello di partenza.
RT3: Manuale Operativo – gennaio 2008
- 52 -
6.19 Generatore di funzioni
Figura 34: Generatore di funzioni – Generatori distinti
Il generatore di funzioni permette di riprodurre onde diverse per il canale di controllo selezionato.
Per ogni funzione possono essere specificati i seguenti parametri:
Forma d’onda
Il generatore è abilitato a generare: sinusoide, triangolare, quadra, arbitraria, esterna, rumore bianco.
Le rampe possono essere eseguite con il setpoint rate, con la maschera di posizionamento, oppure con il
generatore step.
Ampiezza
Si imposta in unità ingegneristiche il valore di picco dell’onda selezionata.
Frequenza
Si imposta la frequenza di generazione che può essere variata in modo continuo.
RT3: Manuale Operativo – gennaio 2008
- 53 -
Velocità di sweep [Hz/s]
Definisce la velocità di variazione tra la frequenza attuale ed il nuovo valore impostato.
Frequenza attuale [Hz]
Indicatore della frequenza attuale di generazione.
Span rate [%/s]
Velocità con cui varia l'ampiezza dell'onda generata al variare del comando di ampiezza. Il valore è
espresso in percentuale al secondo perché riferito al fondoscala del sensore impiegato come
controreazione per il canale di controllo. Questa funzione genera gradualmente l’onda all’inizio e alla
fine della generazione.
Es: stiamo controreazionando in spostamento con un sensore di fondoscala 100 mm; se imponiamo uno
Span Rate di 10 [%/s] tutte le variazioni di ampiezza dell'onda generata avverranno con un gradiente di
10 mm/s.
N° di cicli da eseguire
Si imposta il numero di cicli da eseguire prima che il generatore si arresti. Per generare un numero di
cicli infinito impostare 0.
N° di cicli eseguiti
Indicatore del numero dei cicli già generati.
Azzera conta cicli
Porta a zero il conteggio del numero di cicli già generati.
Inverti ciclo
Introduce uno sfasamento di 180 gradi nella generazione dell'onda.
Abilita controllo di ampiezza
Abilita il controllo di ampiezza sul canale selezionato.
Disabilita spanrate
Disabilita lo Span Rate all'avvio della generazione. In questo modo è possibile, sin dal primo ciclo,
generare l’onda all'ampiezza impostata.
Arresta idraulica a termine cicli
Se abilitato, nel momento in cui termina la prova, viene fermata l’idraulica. Questa opzione è stata
inserita per prove lunghe o che non prevedono la presenza costante dell’operatore: appena giunta al
termine, l’arresto delle pompe evita consumi inutili di energia.
Controllo picco valle
Durante la generazione permette di attivare l’algoritmo di controllo picco-valle in modo da raggiungere
e mantenere automaticamente l’ampiezza desiderata.
RT3: Manuale Operativo – gennaio 2008
- 54 -
Attraverso un menu a tendina, è possibile scegliere di impostare le seguenti modalità:
Generatori distinti: per generare forme d’onda autonome per ciascun singolo canale;
Generatore comune: per la generazione sincronizzata della stessa forma d’onda su canali distinti,
potendo impostare e variare per ciascuno l’ampiezza e la relazione di fase.
Nel caso di generatore comune il controllo di ampiezza con onda sinusoidale garantisce anche il
mantenimento esatto della relazione di fase desiderata tra i canali.
Figura 35: Generatore di funzioni – Generatore comune
Duty cycle
Attivo solo nel caso di onda quadra; stabilisce in percentuale del periodo la durata di mantenimento del
valore di ampiezza.
Selettore generatore master
Nel caso di generazione comune, consente di selezionare il canale di riferimento per la definizione della
fase tra i vari attuatori.
Avvio
Avvia e ferma la generazione.
Pausa
Interrompe e riavvia la generazione.
RT3: Manuale Operativo – gennaio 2008
- 55 -
6.20 Parametri controllo di ampiezza
Figura 36: Parametri controllo di ampiezza
Guadagno controllore ampiezza
Fattore per cui è moltiplicato l'errore di ampiezza, prima di essere sommato al comando.
Selezione generatore
Selezione del canale di controllo.
Fattore amplificazione iniziale
Quando si attiva il controllo di ampiezza, il comando definito nel generatore di funzioni viene
moltiplicato per questo fattore prima di essere inviato al loop di controllo. Quando si esegue una prova e
si abilita il controllo d’ampiezza, l’algoritmo progressivamente calcola il fattore di correzione per il
raggiungimento del valore effettivo desiderato. Quando si arresta il generatore e si riparte, bisognerebbe
attendere ogni volta l’assestamento del controllo d’ampiezza. Impostando questo parametro con quello
risultante da una precedente regolazione del controllo d’ampiezza, si può raggiungere tempestivamente
l’ampiezza desiderata.
Se il valore immesso è maggiore di 1 si ha un’amplificazione del comando; viceversa, nel caso in cui sia
minore di 1 si ottiene una attenuazione del comando.
Fattore di correzione ampiezza attuale
Indicatore del fattore di amplificazione attualmente calcolato dall'algoritmo di controllo di ampiezza;
l'ampiezza desiderata è moltiplicata per questo valore prima di essere passata come comando,
all'algoritmo di controllo PID.
Metodo controllo di ampiezza
Con questo selettore si sceglie la modalità di calcolo dell’ampiezza della sinusoide:
Ampiezza armonica fondamentale: il controllo di ampiezza agirà per fare in modo che l’armonica
fondamentale della grandezza controllata, corrispondente alla frequenza di generazione, corrisponda
all’ampiezza impostata.
RT3: Manuale Operativo – gennaio 2008
- 56 -
Ampiezza Massimo - Minimo: il controllo di ampiezza agirà per fare in modo che il picco e la valle
della grandezza controllata corrispondano all’ampiezza desiderata, indipendentemente dalla distorsione
del segnale.
6.21 Generatore step
Figura 37: Definizione profilo a step
Questa maschera consente di definire per ogni attuatore una successione di eventi da riprodurre.
La scaletta creata è visualizzata nella tabella.
Richiama profilo
Consente di recuperare un profilo precedentemente salvato.
Salva profilo
Consente di salvare su file il profilo visualizzato nella tabella.
Modifica step
Apre una finestra per la definizione o la modifica dei vari step.
RT3: Manuale Operativo – gennaio 2008
- 57 -
Selezionando come “Tipo step”:
Generazione: si imposta la generazione di un segnale con i relativi parametri (ampiezza, frequenza,
numero di cicli, velocità di sweep, spanrate, tipo di onda, tipo di generatore, guadagno controllo di
ampiezza, fattore di correzione iniziale); è possibile abilitare o disabilitare lo SpanRate ed il Controllo di
ampiezza e memorizzare il fattore correttivo dell’ampiezza per gli eventuali cicli successivi.
Mantenimento: si mantiene il valore finale dello step precedente per una determinata durata.
Figura 38: Modifica step - Generazione e Mantenimento
Rampa: si esegue una rampa che parte dal valore finale dello step precedente e arriva al Setpoint
impostato, in un tempo pari al numero di secondi inserito.
Ogni volta che si vuole modificare la modalità di controllo è necessario definire lo step di cambio
modalità.
Quando si crea dall’inizio una sequenza, il primo step definito deve essere di cambio modalità
RT3: Manuale Operativo – gennaio 2008
- 58 -
Figura 39: Modifica step - Rampa e Cambio modalità
RT3: Manuale Operativo – gennaio 2008
- 59 -
6.22 Impostazione numero di cicli
Figura 40: Impostazione numero di cicli
Permette di impostare il numero di cicli attualmente eseguiti dal generatore, si può utilizzare questa
funzione esclusivamente a generatore fermo. Si impiega tipicamente per riprendere una prova di fatica,
quando il campione è stato momentaneamente rimosso e si è impiegata la macchina per altri test.
RT3: Manuale Operativo – gennaio 2008
- 60 -
6.23 Profilo arbitrario
Figura 41: Aggiornamento profilo arbitrario
Con questa maschera è possibile richiamare da file un profilo arbitrario ed inviarlo come comando al
controllore. In questo modo, quando si seleziona nel Generatore di funzioni la forma d’onda arbitraria, è
possibile generare il profilo desiderato definito esternamente come sequenza di punti.
Un menu a tendina permette di selezionare il canale per il quale si desidera generare il profilo caricato.
Carica nuovo profilo
Il profilo da caricare deve essere salvato su file e questo tasto consente di aprire la finestra per la scelta
del file da richiamare. Una volta caricato, il nome del file compare nell’apposita finestra ed il profilo è
visualizzato nel grafico.
Invia profilo arbitrario
Il profilo caricato e visualizzato, deve essere inviato e salvato nella memoria assegnata al generatore di
funzioni.
In appendice B è indicato un file di esempio per la definizione del profilo arbitrario.
RT3: Manuale Operativo – gennaio 2008
- 61 -
6.24 Profilo ampiezza variabile
Figura 42: Profilo di ampiezza variabile
Con questa maschera è possibile caricare un profilo d’ampiezza variabile ed inviarlo al controllore RT3.
In questo modo, quando si seleziona nel Generatore la Forma d’onda ampiezza variabile, è possibile
generare il profilo definito.
La tabella riporta per ogni punto il valore di ampiezza, la modalità di raccordo e l’intervallo di tempo
per il congiungimento con il punto successivo. Il raccordo può essere lineare o con funzione coseno.
Un menu a tendina permette di selezionare il canale sul quale si desidera generare il profilo caricato.
Carica nuovo profilo
Il profilo da caricare deve essere archiviato su file con estensione dat. Questo tasto consente di aprire la
finestra per la scelta del file da caricare. Una volta caricato, il nome del file compare nell’apposita
finestra e il profilo viene visualizzato nella tabella.
Abilita profilo
Il profilo caricato e visualizzato, deve essere abilitato, ossia inviato alla memoria assegnata al
generatore di funzioni.
In appendice C è indicato un file di esempio per la definizione del profilo ampiezza variabile.
RT3: Manuale Operativo – gennaio 2008
- 62 -
7 Appendice A: Connettori
7.1 Collegamento dei trasduttori
Figura 43
RT3: Manuale Operativo – gennaio 2008
- 63 -
7.2 Collegamento delle servovalvole
Figura 44
RT3: Manuale Operativo – gennaio 2008
- 64 -
7.3 Collegamento della pompa
Figura 45
RT3: Manuale Operativo – gennaio 2008
- 65 -
7.4 Ponticelli per il funzionamento del controllore senza pompa
Figura 46
RT3: Manuale Operativo – gennaio 2008
- 66 -
7.5 Collegamento del manifold idraulico
Figura 47
RT3: Manuale Operativo – gennaio 2008
- 67 -
7.6 Collegamento del pulsante esterno di emergenza
Figura 48
7.7 Ponticelli per il funzionamento senza pulsante esterno di emergenza
Figura 49
RT3: Manuale Operativo – gennaio 2008
- 68 -
8
Appendice B: esempio di file per profilo arbitrario
Nella prima colonna è indicato il tempo espresso in secondi, nelle colonne successive sono indicate
le ampiezzerelative ai canali di controllo (3 per la tabella di esempio).
Le’unità di misura devono essere congruenti con quella dei trasduttori di controreazione.
Il controllore RT3 raccorda i profili in generazione con la frequenza di controllo di 2 kHz
RT3: Manuale Operativo – gennaio 2008
- 69 -
9
Appendice C: esempio di file per profilo ampiezza variabile
Esempio per 3 canali di controllo:
la colonna A indica la sequenza di punti per il canale n. 1
la colonna B indica il tipo di raccordo (0 = coseno; 1 = retta)
la colonna C indica la sequenza di punti per il canale n. 2
la colonna D indica il tipo di raccordo (0 = coseno; 1 = retta)
la colonna E indica la sequenza di punti per il canale n. 3
la colonna F indica il tipo di raccordo (0 = coseno; 1 = retta)
la colonna G indica il delta t di raccordo espresso in secondi.
Il file di profilo può essere creato in excel rispettando le seguenti regole:
1) Il file deve contenere 3 colonne con i campi delimitati da tabulazione;
2) Il separatore decimale deve essere il . ( punto);
3) Il file deve avere formato testo con estensione *.dat
4) La prima riga deve sempre essere di intestazione:
Punti [UI]
Raccordo
dt [s]
5) UI: sta per unità ingegneristiche da specificare a seconda del profilo che si vuole eseguire;
le UI specificate nel file devono coincidere con quelle del canale di controreazione sia per
aggiornare il profilo che per avviare la generazione.
Colonna 1: punto di arrivo del profilo espresso in UI
Colonna 2: tipo di raccordo utilizzato per raggiungere il punto ( 0: coseno, 1: retta)
Colonna 3: intervallo di tempo che passa tra il punto in esame e il successivo
( il minimo dt ammesso è 0.05 [s])
RT3: Manuale Operativo – gennaio 2008
- 70 -
10
Dalmine, 01 febbraio 2006
Oggetto:
DICHIARAZIONE DI CONFORMITA’
Prodotto:
Sistema di controllo RT3
Con la presente dichiariamo che l’apparecchiatura denominata
Sistema di controllo RT3
adempie alle direttive dell’Unione Europea,
con particolare riguardo alle norme:
89/336/CEE relative alla compatibilità elettromagnetica EMC;
73/23/CEE relative alla sicurezza delle apparecchiature elettriche a bassa tensione;
ed è conforme alle direttive:
EN 61326
EN 55011
EN 61010-1
La presente dichiarazione perde di validità nel caso in cui, senza l’espressa dichiarazione di
consenso di Trio Sistemi e Misure S.r.l., l’apparecchiatura sia stata in qualche modo modificata o
manomessa, oppure sia stata integrata con componenti non conformi.
TRIO SISTEMI E MISURE S.r.l.
Daniele Bonetti
TRIO Sistemi e Misure S.r.l. a socio unico
Viale G. Marconi, 12E 24044 Dalmine (BG)
Tel. 035-373456
Fax 035-373665
E-mail [email protected]
www.triosistemi.it
RT3: Manuale Operativo – gennaio 2008
- 71 -
11 Indice delle figure
Figura 1: Il sistema di controllo RT3 ..........................................................................................................5
Figura 2: Pannello frontale del controllore RT3 .........................................................................................6
Figura 3: Pannello posteriore del controllore RT3......................................................................................7
Figura 4: Pannello principale di controllo nella versione bicanale ...........................................................12
Figura 5: Pannello di controllo..................................................................................................................15
Figura 6: Parametri controllore PID..........................................................................................................18
Figura 7: Parametri controllore PID - Filtro Feed-Foreward ....................................................................19
Figura 8: Parametri generici servovalvola.................................................................................................20
Figura 9: Parametri servovalvola - Triplostadio........................................................................................21
Figura 10: Parametri channel limit channel – Modalità di controllo primario e Modalità di controllo
limite.......................................................................................................................................22
Figura 11: Definizione modalità di controllo ............................................................................................24
Figura 12: Definizione dei canali di acquisizione .....................................................................................26
Figura 13: Assegnazione trasduttori ai canali acquisiti.............................................................................27
Figura 14: Definizione carico calcolato ....................................................................................................28
Figura 15: Definizione limiti.....................................................................................................................30
Figura 16: Azzeramento dei trasduttori.....................................................................................................31
Figura 17: Definizione sensori ..................................................................................................................32
Figura 18: Calibrazione trasduttori............................................................................................................33
Figura 19: Condizionatori .........................................................................................................................34
Figura 20: Oscilloscopio ...........................................................................................................................35
Figura 21: Oscilloscopio multitraccia .......................................................................................................37
Figura 22: Indicatori digitali......................................................................................................................38
Figura 23: Indicatori digitali - Max e Min ................................................................................................38
Figura 24: Acquisizione - Grafico.............................................................................................................39
Figura 25: Acquisizione - Parametri .........................................................................................................40
Figura 26: Test fatica - Grafico .................................................................................................................42
Figura 27: Test fatica - Parametri..............................................................................................................43
Figura 28: Test fatica – Intervallo acquisizione ........................................................................................45
Figura 29: Test fatica – Canali sottopicco.................................................................................................46
Figura 30: Visualizzazione - Grafico ........................................................................................................48
Figura 31: Visualizzazione – Max e Min ..................................................................................................50
Figura 32: Visualizzazione – Parametri fatica ..........................................................................................51
Figura 33: Posizionamento attuatori..........................................................................................................52
Figura 34: Generatore di funzioni – Generatori distinti ............................................................................53
Figura 35: Generatore di funzioni – Generatore comune..........................................................................55
Figura 36: Parametri controllo di ampiezza ..............................................................................................56
Figura 37: Definizione profilo a step ........................................................................................................57
Figura 38: Modifica step - Generazione e Mantenimento.........................................................................58
Figura 39: Modifica step - Rampa e Cambio modalità .............................................................................59
Figura 40: Impostazione numero di cicli...................................................................................................60
Figura 41: Aggiornamento profilo arbitrario.............................................................................................61
Figura 42: Profilo di ampiezza variabile ...................................................................................................62
Figura 43: Collegamento dei trasduttori....................................................................................................63
RT3: Manuale Operativo – gennaio 2008
- 72 -
Figura 44: Collegamento delle servovalvole.............................................................................................64
Figura 45: Collegamento della pompa ......................................................................................................65
Figura 46: Jumper pompa per funzionamento locale ................................................................................66
Figura 47: Connettore manifold ................................................................................................................67
Figura 48: Connettore emergenza .............................................................................................................68
Figura 48: Jumper emergenza per funzionamento locale..........................................................................68
RT3: Manuale Operativo – gennaio 2008
- 73 -