Corso di Fisica
Terza Liceo Scientifico
Questo libro è stato interamente scritto a Pordenone da Francesco Saitta, Docente di Matematica e
Fisica, c.d.c A049.
Un ringraziamento particolare va a Francesca Del Puppo, studentessa di Fisica all’università di Trieste,
per la sua accurata lettura delle note, le puntuali osservazioni ed i preziosi suggerimenti per la stesura
del testo attuale.
Testo elaborato e prodotto con kile (http://kile.sourceforge.net/) e Latex (http://www.latex-project.org/),
Figure prodotte con Geogebra (http://www.geogebra.org/) o Gnuplot (http://www.gnuplot.info/),
Ultimo aggiornamento Febbraio 2017.
Quest’opera è distribuita con Licenza Creative Commons Attribuzione - Condividi allo stesso
modo 4.0 Internazionale.
Tu sei libero di:
• Condividere: riprodurre, distribuire, comunicare al pubblico, esporre in pubblico,
rappresentare, eseguire e recitare questo materiale con qualsiasi mezzo e formato
• Modificare: remixare, trasformare il materiale e basarti su di esso per le tue opere
per qualsiasi fine, anche commerciale, ai seguenti termini:
• Attribuzione: Devi attribuire adeguatamente la paternità sul materiale, fornire un
link alla licenza e indicare se sono state effettuate modifiche. Puoi realizzare questi termini in qualsiasi maniera ragionevolmente possibile, ma non in modo tale da
suggerire che il licenziante avalli te o il modo in cui usi il materiale.
• Stessa Licenza: Se remixi, trasformi il materiale o ti basi su di esso, devi distribuire
i tuoi contributi con la stessa licenza del materiale originario.
Questo è un riassunto in linguaggio accessibile a tutti (e non un sostituto)
della licenza, per leggere una copia completa della quale visita il sito web
http://creativecommons.org/licenses/by-sa/4.0/ o spedisci una lettera a Creative Commons,
171 Second Street, Suite 300, San Francisco, California, 94105, USA.
Francesco Saitta, Pordenone Febbraio 2017
ii
INDICE
Indice
0 Introduzione
1 Moti e Dinamica
1.1 Cinematica rettilinea . . . . . . . . . . . . . . . .
1.1.1 Moto rettilineo uniforme . . . . . . . . . .
1.1.2 Moto rettilineo uniformemente accelerato
1.1.3 Moto rettilineo vario . . . . . . . . . . . .
1.2 Cinematica bidimensionale . . . . . . . . . . . . .
1.2.1 Moto parabolico . . . . . . . . . . . . . .
1.2.2 Moto circolare uniforme . . . . . . . . . .
1.2.3 Moto armonico . . . . . . . . . . . . . . .
1.3 I principi della dinamica . . . . . . . . . . . . . .
1.3.1 Primo principio della dinamica . . . . . .
1.3.2 Secondo principio della dinamica . . . . .
1.3.3 Terzo principio della dinamica . . . . . .
1.3.4 Sistemi di riferimento non inerziali . . . .
1.4 Work and Energy . . . . . . . . . . . . . . . . . .
1.4.1 Mechanical work . . . . . . . . . . . . . .
1.4.2 Conservative forces . . . . . . . . . . . . .
1.4.3 Energy . . . . . . . . . . . . . . . . . . . .
1.4.4 Conservation of mechanical energy . . . .
1.4.5 Work done by non-conservative forces . .
1.4.6 Problem Solving . . . . . . . . . . . . . .
1.4.7 Power . . . . . . . . . . . . . . . . . . . .
1.4.8 The Feynman point of view . . . . . . . .
1.5 Meccanica dei fluidi . . . . . . . . . . . . . . . .
1.5.1 Fluidi in moto . . . . . . . . . . . . . . .
1.5.2 Equazione di continuità . . . . . . . . . .
1.5.3 Teorema di Bernoulli . . . . . . . . . . . .
1.5.4 Applicazioni . . . . . . . . . . . . . . . . .
1.6 Esercizi . . . . . . . . . . . . . . . . . . . . . . .
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
5
5
7
9
9
11
12
15
15
15
16
17
18
19
19
24
25
27
29
29
31
31
32
33
33
34
36
40
2 Relatività Galileiana
2.1 Spazio e tempo nella fisica classica . . . . . . . . . . . . . . . .
2.1.1 Il carattere assoluto di spazio e tempo: Galilei e Newton
2.1.2 Il concetto di spazio secondo Berkeley e Mach . . . . . .
2.2 Legge di composizione delle posizioni e degli spostamenti . . .
2.3 Legge di composizione delle velocità . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
51
52
52
53
54
54
Francesco Saitta, Pordenone Febbraio 2017
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
iii
INDICE
2.4
2.5
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
55
56
56
56
58
3 Quantità di moto ed urti
3.1 Teorema dell’impulso . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Teorema di conservazione della quantità di moto . . . . . . . . . .
3.3 Descartes e Leibniz: dibattito sui principi di conservazione . . . . .
3.4 Urti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Urti completamente anelastici in una, due o tre dimensioni
3.4.2 Urti elastici in una dimensione . . . . . . . . . . . . . . . .
3.4.3 Urti elastici in due dimensioni . . . . . . . . . . . . . . . . .
3.5 Centro di massa e moto di sistemi di particelle . . . . . . . . . . .
3.6 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
63
63
64
65
68
68
69
70
71
73
4 Momento angolare e moto rotatorio
4.1 Momento d’inerzia . . . . . . . . . . . . . . . . .
4.1.1 Rotazione di un punto materiale . . . . .
4.1.2 Rotazione di un sistema di punti materiali
4.1.3 Rotazione di un corpo rigido . . . . . . .
4.2 Momento angolare . . . . . . . . . . . . . . . . .
4.3 Teorema di conservazione del momento angolare
4.4 Dinamica rotazionale . . . . . . . . . . . . . . . .
4.4.1 Lavoro dei momenti delle forze . . . . . .
4.4.2 Energia cinetica rotazionale . . . . . . . .
4.4.3 Moti di un corpo rigido . . . . . . . . . .
4.5 Parallelismo tra dinamica traslatoria e rotatoria .
4.6 Equazioni cardinali della dinamica . . . . . . . .
4.7 Esercizi . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
79
79
80
81
82
83
84
84
85
86
87
89
90
91
.
.
.
.
.
.
.
.
.
.
.
.
.
97
97
97
98
99
99
101
103
104
105
106
107
108
110
2.6
2.7
Legge di composizione delle accelerazioni .
Trasformazioni di Galileo . . . . . . . . .
2.5.1 Invarianza delle lunghezze . . . . .
Principio di relatività galileiano . . . . . .
Esercizi . . . . . . . . . . . . . . . . . . .
5 Gravitazione universale
5.1 Le leggi di Keplero . . . . . . . . . .
5.1.1 La prima legge di Keplero . .
5.1.2 La seconda legge di Keplero .
5.1.3 La terza legge di Keplero . .
5.2 La legge di gravitazione universale .
5.3 Il concetto di campo . . . . . . . . .
5.3.1 Linee di campo . . . . . . . .
5.4 Il campo gravitazionale . . . . . . .
5.5 L’energia potenziale gravitazionale .
5.6 Pianeti e satelliti . . . . . . . . . . .
5.6.1 I satelliti artificiali della terra
5.7 Traiettorie ed energia . . . . . . . .
5.8 Esercizi . . . . . . . . . . . . . . . .
Francesco Saitta, Pordenone Febbraio 2017
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
iv
INDICE
6 Termodinamica
6.1 Teoria cinetica dei gas perfetti . . . . . . . .
6.1.1 Principio di equipartizione dell’energia
6.2 First principle of thermodynamics . . . . . .
6.2.1 Introduction to Thermodynamics . . .
6.2.2 Thermal Machines . . . . . . . . . . .
6.2.3 Internal Energy . . . . . . . . . . . . .
6.2.4 Heat capacities of gases . . . . . . . .
6.2.5 Mechanical work of gases . . . . . . .
6.2.6 The first law of thermodynamics . . .
6.3 Rendimento delle macchine termiche . . . . .
6.3.1 Macchina di Stirling . . . . . . . . . .
6.3.2 Macchina di Carnot . . . . . . . . . .
6.3.3 Macchina di Otto (motore 4 tempi) .
6.3.4 Macchina Diesel . . . . . . . . . . . .
6.3.5 Macchina Frigorifero . . . . . . . . . .
6.4 Secondo principio della termodinamica . . . .
6.4.1 Enunciati di Clausius, Kelvin-Planck e
6.4.2 Enunciato di Carnot ed entropia . . .
6.5 Esercizi . . . . . . . . . . . . . . . . . . . . .
Francesco Saitta, Pordenone Febbraio 2017
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
loro equivalenza
. . . . . . . . . .
. . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
115
117
120
120
120
121
121
122
123
127
129
129
130
132
134
135
136
136
136
143
v
CAPITOLO 0. INTRODUZIONE
Capitolo
0
Introduzione
Questo corso nasce dall’idea di consegnare agli studenti uno strumento di lavoro gratuito, snello e
flessibile. L’idea fondamentale è che queste note possano essere veicolo di uno studio dinamico, che
vengano sottolineate, integrate dagli appunti presi in classe o dagli approfondimenti personali, anche
modificate nel corso degli anni per renderle sempre più utili all’apprendimento della disciplina.
Le dispense sono pensate come inserite in un percorso di didattica collaborativa e multimediale:
• non vi si trovano schemi riassuntivi o formulari perché questi verranno chiesti agli studenti
durante il corso all’interno di una piattaforma multimediale o semplicemente negli appunti
personali;
• possono e devono essere affiancate ad una costante ricerca di fonti, materiali audio e video,
simulazioni digitali ed attività di laboratorio vere e proprie.
Gli esercizi, destinati a crescere in numero di anno in anno, non sono suddivisi nei paragrafi del
libro perché gli studenti siano stimolati a capire l’argomento specifico cui fanno riferimento, affinché
l’esercizio non diventi atto puramente meccanico e relativo ad una certa formula, ma abbia una forte
componente di discernimento e descrizione della realtà. Anche gli esercizi verranno supportati da una
serie di attività didattiche, esempi, compiti e test, forniti nella piattaforma digitale di classe.
Talvolta le costanti da utilizzare non sono esplicitate o presenti nel testo, cosı̀ da stimolare gli studenti
alla loro ricerca, con i canali preferiti.
Alcune parti del testo, cosı̀ come gli ultimi esercizi di ogni capitolo, sono in inglese; questo per
abituare gli studenti all’utilizzo della lingua veicolare della scienza al di fuori dell’insegnamento dedicato. In relazione al programma della classe redatto dal consiglio di classe ad inizio anno, alcune parti
di programma (tipicamente quelle già scritte in inglese) potranno essere affrontate con alcune lezioni
in lingua, in collaborazione con il/la docente di inglese.
Francesco Saitta, Pordenone Febbraio 2017
1
CAPITOLO 1. MOTI E DINAMICA
Capitolo
1
Moti e Dinamica
Ammesso - come visto ed ampiamente discusso gli scorsi due anni- che la fisica è la scienza che
descrive e predice i fenomeni naturali che avvengono nell’universo, la prima cosa che possiamo fare per
descrivere la realtà che ci circonda è quella di studiare come si muovono i punti materiali e quali siano
le cause del loro moto. Gli argomenti di questo capitolo sono già stati affrontati nel corso del primo
biennio di liceo: li riprendiamo all’inizio del secondo biennio per evidenziare ed approfondire alcuni
aspetti concettuali e matematici utili per il proseguo del corso, in particolare la geometria analitica e
l’algebra vettoriale.
Fu Galileo Galilei (Pisa, 1564 - Arcetri, 1642), l’ultimo dei filosofi naturali ed il primo dei fisici, a
studiare in modo quantitativo la cinematica: la descrizione dei moti dal punto di vista geometrico,
fatta senza prendere in considerazione le cause dei moti stessi. Questa semplificazione ha permesso e
permette di schematizzare e descrivere anche sperimentalmente diverse situazioni concrete: lo stesso
Galilei riuscı̀ a verificare le leggi della cinematica in laboratorio, riuscendo a minimizzare gli effetti
reali di attrito non presi in considerazione dalla cinematica, che pur esistono. Nel corso dei suoi studi
lo scienziato pisano - come vedremo nel capitolo seguente con il principio di relatività galileiano affrontò anche il problema delle cause del moto, ed in qualche modo anticipò alcune delle leggi che ora
conosciamo come i principi della dinamica, ma non le formalizzò mai in termini scientifici.
La dinamica per come è conosciuta al giorno d’oggi affonda le sue radici negli studi di Isaac Newton
(Woolsthorpe, 1642 - Londra, 1727), fisico e filosofo britannico, presidente della Royal Society, il
cui lavoro spaziò dallo studio delle forze all’ottica, dalla gravitazione universale allo sviluppo della
matematica infinitesimale. Newton studiò dal punto di vista formale e matematico il problema delle
cause del moto, riprendendo alcuni ragionamenti fatti da Galilei ed assumendo tutta la cinematica
del fisico pisano. Nella sua opera “Philosophiae Naturalis Principia Mathematica” (Newton, 1687),
lo scienziato britannico esplicita le basi matematiche delle sue teorie ed enuncia i famosi tre principi
della dinamica che fondano, assieme al lavoro di Galilei, tutta l’impostazione della meccanica e della
fisica dei seguenti due secoli.
Riprendiamo dunque alcuni concetti fondamentali per la descrizione di cinematica e dinamica
Punto materiale Uno dei concetti fondamentali della meccanica è il concetto di punto materiale.
Con punto materiale si intende un corpo le cui dimensioni si possono trascurare nella descrizione del
suo moto. É ben chiaro che questa possibilità dipende dalle condizioni concrete di questo o quell’altro
problema. Per esempio, i pianeti possono esser considerati punti materiali quando si studia la loro
rivoluzione intorno al sole, ma, naturalmente, non quando si considera la loro rotazione.(Landau e
Lifshitz, 1999a).
Francesco Saitta, Pordenone Febbraio 2017
3
CAPITOLO 1. MOTI E DINAMICA
Sistemi di riferimento Per poter definire la posizione di un punto materiale in modo quantitativo
dobbiamo definire un riferimento rispetto al quale farlo. Chiedendoci ad esempio la posizione di Luca
all’interno della classe qualcuno potrà rispondere “è un posto davanti a me” oppure “il posto davanti
alla cattedra” o ancora “nella fila centrale il terzo banco dal fondo a sinistra”: in ogni caso la risposta
prevede un riferimento al luogo in cui ci si trova. La scelta che gli scienziati fanno per poter definire la
posizione di punti materiali è quella di definire dei sistemi di coordinate; il più utilizzato, che useremo
anche noi durante tutto il corso di fisica è il sistema di riferimento cartesiano: un sistema di
rette orientate perpendicolari tra loro all’interno delle quali definire la posizione di un punto materiale
come vettore con coordinate sulle rette, una se il problema è unidimensionale, due se bidimensionale,
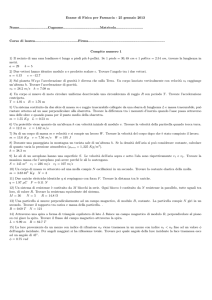
tre se tridimensionale. In figura (1.1) vediamo un esempio di posizione rispettivamente nello spazio ,
nel piano e nella retta.
(a) Punto in 3D
(b) Punto in 2D
(c) Punto in 1D
Figura 1.1: Posizione di un punto materiale in un riferimento cartesiano.
Variabili cinematiche Le variabili cinematiche di interesse per lo studio dei moti sono i vettori
posizione ~s(t), velocità ~v (t) ed accelerazione ~a(t). A seconda della dimensione di riferimento del
problema naturalmente si tratta di vettori in una, due o tre dimensioni.
Il vettore posizione è il vettore che identifica la posizione del punto materiale nello spazio: ha come
coordinate le coordinate del punto stesso. La posizione di un punto materiale in SI si misura in metri.
~
Il vettore velocità viene definito a partire dalla velocità media ~vm = ∆s/∆t:
la velocità media tra due
1
istanti t2 e t1 è data dallo spostamento effettuato tra i due istanti e il tempo trascorso (la differenza
tra i due istanti). La velocità istantanea invece rappresenta la velocità in un certo istante: possiamo
pensare che la velocità istantanea sia la velocità media tra due istanti molto vicini (l’intervallo di tempo
deve essere trascurabile rispetto al fenomeno che si sta considerando); dal punto di vista matematico
si può dire che la velocità istantanea è il limite per ∆t che tende a zero della velocità media, come si
vedrà nel corso di matematica parlando di analisi matematica e limiti. Per quanto ci riguarda quando
scriveremo d anziché ∆ intenderemo considerare un intervallo molto piccolo rispetto al fenomeno
considerato; per cui scrivendo v = ∆s/∆t parleremo di velocità media, scrivendo v = ds/dt parleremo
di velocità istantanea, e cosı̀ con tutte le altre grandezze ottenibili come rapporto tra variazioni di
altre quantità. La velocità di un punto materiale in SI si misura in metri al secondo.
1
Ricordiamo che in fisica il concetto di spostamento è diverso dal pensiero intuitivo di spazio percorso. Lo spostamento
è la differenza tra due vettori posizione in due istanti diversi. Risulta cosı̀ che se il punto materiale in considerazione
parte dal punto A e dopo un certo percorso torna al punto A stesso avrà percorso una certa quantità di spazio, ma lo
spostamento risulta essere il vettore nullo
Francesco Saitta, Pordenone Febbraio 2017
4
CAPITOLO 1. MOTI E DINAMICA
~
Il vettore accelerazione viene definito a partire dall’accelerazione media ~am = ∆v/∆t:
l’accelerazione
media tra due istanti t2 e t1 è data dalla differenza dei vettori velocità tra i due istanti e il tempo
trascorso (la differenza tra i due istanti). Analogamente al caso della velocità l’accelerazione istantanea
è il limite per ∆t che tende a zero dell’accelerazione media: è l’accelerazione media calcolata tra due
istanti di tempo molto vicini tra loro, tali che la differenza tra i due istanti sia molto più piccola
rispetto al fenomeno considerato.
Traiettoria Si definisce traiettoria l’insieme dei punti dello spazio percorsi dal punto materiale.
Essa è quindi il percorso che il punto materiale descrive durante il fenomeno considerato; per quanto
detto in precedenza è importante sottolineare come la lunghezza della traiettoria non corrisponda
necessariamente con lo spostamento del punto materiale nè con lo spazio percorso; ad esempio un
punto materiale che si muova in linea retta in avanti per 2 m, poi indietro per 3m, poi ancora in avanti
per 1m avrà percorso 6m, fatto spostamento nullo e la traiettoria un segmento di lunghezza 3m.
Legge oraria Si definisce legge oraria la relazione tra posizione del punto materiale e tempo trascorso. È una funzione reale di variabile reale nel caso di un problema unidimensionale, una funzione
vettoriale in due o tre dimensioni negli altri casi, per studiare i quali basta considerare il vettore ~s(t)
nelle sue componenti, ognuna delle quali sarà una funzione reale di variabile reale. Per quanto ci riguarda studieremo nel dettaglio il caso unidimensionale, in cui la legge oraria è semplicemente data dalla
funzione s(t), e bidimensionale in cui si avrà ~s(t) = (x(t), y(t)) o altrimenti scritto ~s(t) = x(t)x̂+y(t)ŷ)
con x̂ e ŷ i versori2 degli assi cartesiani.
1.1
Cinematica rettilinea
I moti più semplici da descrivere sono i moti che avvengono lungo una retta, in cui le variabili cinematiche posizione, velocità ed accelerazione sono vettori in una dimensione, descrivibili quindi come
scalari: positivi se il verso è concorde all’asse scelto, negativi se il verso è discorde. Particolarmente efficace per la descrizione di questo moto è il diagramma orario, un grafico cartesiano che rappresenta
in ascissa il tempo ed in ordinata la posizione del punto materiale. A differenza della traiettoria, che
resta sempre una retta o un segmento se consideriamo il moto rettilineo tra due particolari istanti di
tempo, il diagramma orario rappresenta la legge oraria e permette di ricavare informazioni importanti
su velocità ed accelerazione, come vedremo nel paragrafo 1.1.3.
1.1.1
Moto rettilineo uniforme
Diremo che un punto materiale si trova in uno stato di moto rettilineo uniforme se la sua velocità
media è sempre uguale alla velocità istantanea, ed ha modulo costante, v. In questa situazione si
ricavano le seguenti leggi per la posizione e la velocità:
s(t) = v(t − t0 ) + s0
(1.1.1)
v(t) = v
(1.1.2)
Per ricavare la legge oraria in questo caso basta applicare la definizione di velocità media in questa
situazione:
2
Ricordiamo che un versore è un vettore di modulo unitario adimensionale, che indica quindi solamente una direzione ed un verso. In generale un versore si ottiene come rapporto tra un vettore ed il suo modulo: v̂)~v /v. Nel caso
bidimensionale cartesiano si avrà per le due direzioni principali x̂ = (1, 0), ŷ = (0, 1).
Francesco Saitta, Pordenone Febbraio 2017
5
CAPITOLO 1. MOTI E DINAMICA
v = vm =
∆s
=
∆t
s(t) − s0
t − t0
=⇒ v(t − t0 ) = s(t) − s0
=
=⇒ v(t − t0 ) + s0 = s(t)
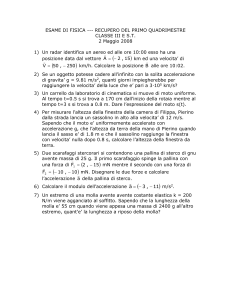
Nel rappresentare la legge oraria nel diagramma orario (t,s) riconosciamo l’equazione di una retta
con coefficiente angolare v ed intercetta s0 , come rappresentato in figura (1.2); la rappresentazione
della legge per la velocità è invece molto più semplice, essendo la velocità costante nel tempo, come
rappresentato nella figura (1.3). È interessante notare come la legge oraria si può ottenere grafi-
(a) v > 0 pendenza positiva
(b) v = 0 pendenza nulla
(c) v < 0 pendenza negativa
Figura 1.2: Diagramma orario del moto rettilineo uniforme. Le grandezze sono intese essere misurate
in SI: spazio in metri, tempo in secondi, velocità in metri al secondo.
Figura 1.3: Rappresentazione cartesiana della legge della velocità nel moto rettilineo uniforme. Le
grandezze sono intese essere misurate in SI: spazio in metri, tempo in secondi, velocità in metri al
secondo.
camente a partire dalla legge della velocità nel seguente modo: lo spostamento effettuato dal punto
Francesco Saitta, Pordenone Febbraio 2017
6
CAPITOLO 1. MOTI E DINAMICA
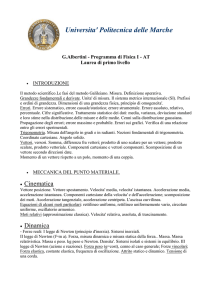
materiale s(t) − s0 è l’area sottesa dalla curva v(t) nel grafico di velocità, come mostrato dalla figura
(1.4). Questa regola - che verrà dimostrata dall’analisi matematica e lo studio delle derivate - si può
assumere come regola generale della cinematica.
Figura 1.4: Relazione tra spazio percorso e grafico della velocità.
1.1.2
Moto rettilineo uniformemente accelerato
Diremo che un punto materiale si trova in uno stato di moto rettilineo uniformemente accelerato se la
sua accelerazione media è sempre uguale alla sua accelerazione istantanea, ed ha modulo costante, a.
In questa situazione si ricavano le seguenti leggi per la posizione e la velocità:
1
a(t − t0 )2 + v0 (t − t0 ) + s0
2
v(t) = a(t − t0 ) + v0
s(t) =
(1.1.3)
(1.1.4)
L’equazione della velocità è ricavabile in modo analogo alla legge oraria del moto rettilineo uniforme.
Per quanto riguarda la legge oraria invece dobbiamo ricorrere alla regola grafica vista nel paragrafo
precedente, come rappresentato in figura (1.5): lo spostamento effettuato s(t) − s0 è dato quindi
dall’area del trapezio di altezza (t − t0 ), base maggiore v(t) = a(t − t0 ) + v0 e base minore v0 .
Il grafico della legge oraria rappresenta una parabola, come già parzialmente visto in matematica
nella risoluzione di disequazioni di secondo grado e come si vedrà nel corso di matematica studiando
geometria analitica. Il segno dell’accelerazione definisce la concavità della parabola: ad accelerazione
positiva corrisponde concavità verso l’alto e ad accelerazione negativa concavità verso il basso; ad
accelerazione sempre maggiore corrisponde una parabola sempre più schiacciata verso l’asse delle
ordinate, ad accelerazione minore una parabola sempre più schiacciata verso l’asse delle ascisse. Gli
altri parametri contribuiscono alla forma della parabola nei modi che verranno studiati nel corso di
matematica e che possono essere testati con semplici prove fatte usando carta millimetrata e penna o
software di geometria dinamica (geogebra ad esempio).
Caduta dei gravi
Il tipico moto rettilineo uniformemente accelerato che possiamo osservare in natura è la caduta di un
oggetto da una certa altezza. Ogni oggetto lasciato cadere da una certa altezza, nell’ipotesi in cui si
possano trascurare tutti gli effetti di attrito dell’aria sull’oggetto stesso, si muove di moto rettilineo
uniformemente accelerato con un’accelerazione - che chiameremo accelerazione di gravità - approssimativamente costante in prossimità della superficie terrestre di modulo pari a g = 9, 81m/s2 , direzione
Francesco Saitta, Pordenone Febbraio 2017
7
CAPITOLO 1. MOTI E DINAMICA
(a) Costruzione della legge oraria
(b) a > 0 concavità verso l’alto
(c) a < 0 concavità verso il basso
Figura 1.5: Moto rettilineo uniformemente accelerato.
lungo la congiungente tra la posizione iniziale dell’oggetto ed il centro della terra e verso che punta al
centro della terra.
L’analisi di Galileo Galilei sulla caduta dei gravi fu sicuramente uno dei primissimi esempi di applicazione del metodo scientifico, con cui il fisico pisano segnò il passaggio tra la filosofia naturale e la
fisica. La leggenda dice che Galilei per verificare l’ipotesi secondo cui la velocità di un grave in caduta
libera è direttamente proporzionale al tempo di caduta e non dipende dalla massa o dalla forma del
grave stesso, come invece doveva essere secondo la teoria Aristotelica del moto, avrebbe lasciato cadere
una serie di oggetti dalla torre di Pisa. Non siamo certi che questo esperimento sia stato realmente
effettuato, ma di certo Galilei ha lasciato molti scritti all’interno dei quali giustifica in modo logico le
sue affermazioni (Galilei (1592, 1638, 1632)); in particolare nell’ultimo di questi scritti alla giornata
terza lo scienziato pisano descrisse l’esperimento con cui verificò la sua ipotesi, utilizzando un piano
inclinato ed un orologio ad acqua: “In un regolo, o vogliàn dir corrente, di legno, lungo circa 12 braccia, e largo per un verso mezo bracio e per l’altro 3 dita, si era in questa minor larghezza incavato
un canaletto, poco più largo d’un dito; tiratolo drittissimo, e, per averlo ben pulito e liscio, incollatovi
dentro una carta pecora zannata e lustrata al possibile, si faceva in esso scendere una palla di bronzo
durissimo, ben rotondata e pulita; costituito che si era il detto regolo pendente, elevando sopra il piano
orizontale una delle sue estremità un braccio o due ad arbitrio, si lasciava (come dico) scendere per
il detto canale la palla, notando, nel modo che appresso dirò, il tempo che consumava nello scorrerlo
tutto, replicando il medesimo atto molte volte per assicurarsi bene della quantità del tempo, nel quale
non si trovava mai differenza né anco della decima parte d’una battuta di polso. Fatta e stabilita
precisamente tale operazione, facemmo scender la medesima palla solamente per la quarta parte della
lunghezza di esso canale; e misurato il tempo della sua scesa, si trovava sempre puntualissimamente
esser la metà dell’altro: e facendo poi l’esperienze di altre parti, esaminando ora il tempo di tutta la
lunghezza col tempo della metà, o con quello delli duo terzi o de i 3/4, o in conclusione con qualunque
altra divisione, per esperienze ben cento volte replicate sempre s’incontrava, gli spazii passati esser tra
di loro come i quadrati e i tempi, e questo in tutte le inclinazioni del piano, cioè del canale nel quale si
faceva scender la palla; dove osservammo ancora, i tempi delle scese per diverse inclinazioni mantener
esquisitamente tra di loro quella proporzione che più a basso troveremo essergli assegnata e dimostrata
dall’Autore. Quanto poi alla misura del tempo, si teneva una gran secchia piena d’acqua, attaccata in
alto, la quale per un sottil cannellino, saldatogli nel fondo, versava un sottil filo d’acqua, che s’andava
Francesco Saitta, Pordenone Febbraio 2017
8
CAPITOLO 1. MOTI E DINAMICA
ricevendo con un piccol bicchiero per tutto ’l tempo che la palla scendeva nel canale e nelle sue parti:
le particelle poi dell’acqua, in tal guisa raccolte, s’andavano di volta in volta con esattissima bilancia
pesando, dandoci le differenze e proporzioni de i pesi loro le differenze e proporzioni de i tempi; e
questo con tal giustezza, che, come ho detto, tali operazioni, molte e molte volte replicate, già mai non
differivano d’un notabil momento.”
1.1.3
Moto rettilineo vario
Diremo che un punto materiale si trova in uno stato di moto rettilineo vario se caratterizzato da
variabili cinematiche s(t), v(t), a(t) che non necessariamente restano costanti nel tempo. In generale
recuperando le considerazioni fatte nei paragrafi precedenti potremo dire che la variazione di velocità
v(t) − v0 è ottenibile come l’area sottostante la curva a(t) nel piano cartesiano (t, a), la variazione di
posizione s(t) − s0 come l’area sottostante la curva v(t) nel piano cartesiano (t, v).
In questo paragrafo affronteremo il problema opposto: conoscendo il diagramma orario capiremo come
ottenere informazioni su velocità ed accelerazione del punto materiale. Consideriamo ad esempio un
punto materiale il cui moto sia descritto dalle figure (1.6).
Diagramma orario La prima figura mostra il diagramma orario che rappresenta il moto del punto
materiale: possiamo certamente dire che per circa un secondo il punto materiale si muove in avanti
(quindi con velocità positiva), poi per circa due secondi, dal secondo uno al secondo tre invece si muove
all’indietro (con velocità negativa quindi), infine riparte in avanti passando per l’origine poco dopo il
quarto secondo.
Velocità Applicando la definizione di velocità media tra due punti possiamo vedere dalla seconda
figura come il modulo della velocità possa essere ricavato come il rapporto tra la variazione di posizione
∆s = s(t) − s0 ed il tempo trascorso ∆t = t − t0 : la velocità media tra i punti s(tA ) ed s(tB ) è dunque
la pendenza della retta secante il diagramma orario nei punti A e B. La velocità istantanea diventa
dunque la pendenza della retta secante il diagramma orario nel caso in cui i due punti A e B siano
molto vicini tra loro, al punto di non essere distinguibili l’uno dall’altro: è dunque la pendenza della
retta tangente alla curva nel punto in questione! Diventa cosı̀ evidente che tutti i punti in cui la
tangente al diagramma orario è parallela all’asse delle ascisse sono punti in cui la velocità è nulla:
osservando attentamente il grafico potremo dedurre che questi punti sono tutti i massimi o i minimi
della curva: definiamo un punto P = (xP , yP ) della curva come massimo se tutti i punti più vicini
ad esso, sia a destra che a sinistra, hanno ordinata minore di yP , minimo invece se i punti più vicini
hanno ordinata maggiore di yP .
Accelerazione L’accelerazione è una variazione di velocità: partendo da quest’idea intuitiva di accelerazione possiamo capire come l’accelerazione del punto materiale sia legata alla concavità della
curva, come mostrato nella terza figura del moto vario. Se la velocità diminuisce la curva tenderà a
”piegarsi” verso il basso dando origine ad una concavità verso il basso, se invece la velocità aumenta
accadrà il contrario. Come per il caso della velocità, queste affermazioni al momento piuttosto qualitative troveranno una dimostrazione matematica formale verrà fatta nel contesto dell’analisi matematica
e dello studio delle derivate.
1.2
Cinematica bidimensionale
La cinematica bidimensionale si fonda sul principio di indipendenza delle azioni simultanee
che afferma come se il moto di un punto materiale avviene in più dimensioni, esso può essere sempre
Francesco Saitta, Pordenone Febbraio 2017
9
CAPITOLO 1. MOTI E DINAMICA
(a) diagramma orario
(b) velocità
(c) accelerazione
Figura 1.6: Moto vario.
scomposto in componenti indipendenti l’una dall’altra. Esso può essere quindi studiato attraverso le
sue componenti , che noi assumeremo sempre essere coordinate cartesiane; il moto risultante sarà il
moto del punto materiale la cui posizione è descritta dal vettore
~s(t) = x(t)x̂ + y(t)ŷ.
La rappresentazione grafica della legge oraria diventa dunque una rappresentazione in tre dimensioni,
o una rappresentazione delle leggi orarie delle singole componenti: per questo motivo utilizzeremo
spesso la rappresentazione della traiettoria per descrivere graficamente il moto, che nel caso bidimensionale è più significativa rispetto al caso unidimensionale.
É importante sottolineare come in un moto in più dimensioni il vettore velocità sia sempre tangente alla traiettoria percorsa dal punto materiale: non facciamo qui una dimostrazione formale di
questo fatto, ma possiamo rendercene conto in modo piuttosto intuitivo pensando alla definizione di
velocità; il vettore velocità è un vettore la cui direzione è data dalla differenza tra due vettori posizione, per cui è un vettore che ha origine in un punto della traiettoria e fine in un altro punto della
traiettoria stessa: evidentemente quando questi due punti tendono a diventare lo stesso la direzione
del vettore velocità diventa il tangente alla curva che definisce la traiettoria. La figura (1.7) mostra
proprio questo fatto.
Per quanto riguarda l’accelerazione in un moto bidimensionale, siamo soliti pensare che essa possa
essere generata solo da una variazione del modulo del vettore velocità: è bene sottolineare come si
possa avere un accelerazione anche solamente con la variazione della direzione o del verso del vettore
velocità. Sappiamo bene infatti che la differenza di due vettori con lo stesso modulo, ma direzione
diversa, non necessariamente risulta essere il vettore nullo. Ecco allora che l’accelerazione in due
dimensioni può essere causata da una variazione di modulo del vettore velocità, da una variazione
della sua direzione, o da una combinazione delle due variazioni. In generale chiameremo accelerazione
tangenziale l’accelerazione dovuta ad una variazione del modulo del vettore velocità del punto materiale, accelerazione centripeta invece l’accelerazione dovuta alla variazione della direzione del vettore
Francesco Saitta, Pordenone Febbraio 2017
10
CAPITOLO 1. MOTI E DINAMICA
(a)
(b)
Figura 1.7: Velocità in un moto bidimensionale.
velocità. Diremo quindi che sempre l’accelerazione di un punto materiale può essere scomposta nel
seguente modo:
~a = ~at + ~ac ,
dove ~at è l’accelerazione tangenziale e ~ac è l’accelerazione centripeta. La componente tangenziale
dell’accelerazione è sempre diretta parallelamente al vettore velocità, e dunque tangente alla traiettoria,
mentre la componente centripeta è sempre perpendicolare alla velocità stessa. Per darci ragione della
direzione delle due componenti dell’accelerazione facciamo riferimento alla figura (1.8). Come si può
vedere in figura se l’accelerazione è dovuta ad una variazione unicamente di modulo della velocità ha
la stessa direzione dei due vettori velocità ~a = ~v1 − ~v2 , se invece l’accelerazione è dovuta solo ad una
variazione di direzione della velocità si ha che l’angolo tra velocità ~v2 ed accelerazione ~a è dato da
γ = π+α
2 : è evidente che se consideriamo la velocità istantanea l’angolo α diventa molto piccolo e
man mano che α diventa piccolo γ si avvicina sempre più a π/2. L’accelerazione centripeta è dunque
perpendicolare alla velocità istantanea.
1.2.1
Moto parabolico
Il moto parabolico è un moto in cui una componente del vettore posizione si muove di moto rettilineo
uniforme, l’altra di moto rettilineo uniformemente accelerato. Ne conseguono le seguenti equazioni
per la descrizione del moto:
x(t) = v0x t + x0
1 2
y(t) =
at + v0y t + y0
2
vx (t) = v0x
(1.2.1)
vy (t) = at + v0y
(1.2.4)
(1.2.2)
(1.2.3)
Il moto si chiama moto parabolico perchè la traiettoria descritta dal punto materiale dal punto di
vista della geometria analitica è un parabola, come si vedrà nel dettaglio nel corso di matematica.
Tutte le considerazioni fatte studiando i due moti che compongono il moto parabolico possono essere
riutilizzate nella descrizione di un moto parabolico. Nella nostra esperienza quotidiana di fenomeni
Francesco Saitta, Pordenone Febbraio 2017
11
CAPITOLO 1. MOTI E DINAMICA
(a) Accelerazione tangenziale
(b) Accelerazione centripeta
Figura 1.8: Direzione delle componenti dell’accelerazione in un moto bidimensionale.
naturali il moto parabolico è uno dei moti che possiamo osservare con più facilità: risponde infatti
alla situazione di caduta di un oggetto con una componente orizzontale di velocità iniziale.
1.2.2
Moto circolare uniforme
Definiamo moto circolare un moto la cui traiettoria è una circonferenza. Il vettore velocità dunque,
essendo sempre tangente alla traiettoria cambia continuamente; per questo il concetto di “uniforme”
in questo caso non può significare, come nel caso unidimensionale, che la velocità è costante. Moto
circolare uniforme si definisce un moto la cui traiettoria è una circonferenza ed il modulo della velocità
è costante. Il moto circolare uniforme è dunque caratterizzato dalle tre grandezze: velocità tangenziale
(~v ), periodo (T , il tempo che il punto materiale impiega a percorrere un giro di circonferenza) e il raggio
della circonferenza (R). Il periodo può essere sostituito dalla frequenza (f o ν), che rappresenta il
numero di giri che il punto materiale compie in un secondo, e si misura in Hertz (Hz). Queste grandezze
si relazionano, per definizione di velocità, nel seguente modo:
v=
2πR
= 2πRf
T
Abbiamo anche dimostrato, utilizzando le similitudini tra triangolo, come illustrato in figura (1.9) che
l’accelerazione, che per quanto detto precedentemente deve essere centripeta e dunque diretta verso il
centro della circonferenza per le proprietà della geometria euclidea, è ottenibile dalla seguente formula:
ac =
v2
R
Le grandezze angolari La descrizione del paragrafo precedente del moto circolare uniforme è una
descrizione che si basa sulle variabili cinematiche classiche descritte anche all’inizio di questo capitolo;
per quanto riguarda i moti circolari hanno grande rilevanza anche le variabili cinematiche angolari:
l’angolo spazzato dal vettore posizione, il vettore velocità angolare ed il vettore accelerazione
Francesco Saitta, Pordenone Febbraio 2017
12
CAPITOLO 1. MOTI E DINAMICA
Figura 1.9: Dimostrazione della formula ac = v 2 /R
angolare. L’angolo spazzato dal vettore posizione ~r(t) tra due istanti t2 e t1 si definisce come l’angolo
θ compreso tra i due vettori r2 ed r1 . La definizione degli angoli in radianti, come mostrato in figura
(1.10), ci permette di passare dalla descrizione tra variabili cinematiche classiche e variabili cinematiche
angolari: lo spazio percorso s è dato da Rθ, se l’angolo è misurato in radianti. Definiamo quindi la
Figura 1.10: Gli angoli in radianti
velocità angolare media ω~m il vettore che ha come modulo la variazione di angolo spazzato dal vettore
posizione del punto materiale e l’intervallo di tempo stesso:
ωm =
Francesco Saitta, Pordenone Febbraio 2017
θ(t2 ) − θ(t1 )
t2 − t1
13
CAPITOLO 1. MOTI E DINAMICA
la velocità angolare istantanea sarà in analogia con le quantità cinematiche istantanee tradizionali
la velocità angolare media calcolata in un intervallo di tempo molto piccolo rispetto alla durata del
fenomeno che stiamo considerando. dal punto di vista della velocità istantanea quindi si ha
v=
R∆θ
∆s
=
= Rω.
∆t
∆t
Il passaggio è giustificato solo nel caso di velocità istantanea, in cui l’intervallo di tempo è molto
piccolo rispetto alla durata del fenomeno e quindi l’arco di circonferenza ∆s può essere approssimato
con la corda ∆r. La direzione del vettore velocità angolare ci permette di collegare il vettore al verso
di rotazione del punto materiale: la direzione di ω
~ è perpendicolare al piano formato da ~r1 ed ~r2 ed
il suo verso definito dalla regola destrorsa, come mostrato in figura (1.11). Unendo le caratteristiche
Figura 1.11: La velocità angolare
del vettore ω appena descritte possiamo concludere che
~v = ω
~ × ~r.
L’accelerazione centripeta può essere espressa anch’essa come funzione della velocità angolare secondo
l’espressione
~ac = ω
~ × ~v
2
ac = ω r
(1.2.5)
(1.2.6)
Per moti in cui la velocità angolare non è costante si può definire l’accelerazione angolare α:
α
~=
Francesco Saitta, Pordenone Febbraio 2017
∆~
ω
.
∆t
14
CAPITOLO 1. MOTI E DINAMICA
Nel caso del moto circolare uniforme avremo:
α
~ = ~0
ω
~ = ~k
v
|~
ω| =
r
θ = ωt + θ0 ,
di cui notiamo le somiglianze formali con le equazioni del moto rettilineo uniforme per le variabili
cinematiche ~s, ~v ed ~a.
1.2.3
Moto armonico
Definiamo moto armonico un moto per cui vale la relazione
~a(t) = −ω 2~s(t)
Una relazione di questo genere tra accelerazione e vettore posizione descrive un’oscillazione periodica
di periodo T = 2π/ω del punto materiale attorno ad un centro (~s = ~0). Abbiamo già discusso nel corso
del primo biennio come la proiezione del moto circolare uniforme lungo una direzione particolare
ed il moto del pendolo semplice siano esempi di moto armonico. I moti armonici ricoprono un ruolo
di prima importanza in fisica, perchè sono alla base della descrizione di moltissimi fenomeni fisici, dal
pendolo semplice alle onde meccaniche, dai circuiti elettrici alla struttura microscopica della materia,
come avremo modo di accennare durante il corso di fisica del secondo biennio e del quinto anno di
liceo.
1.3
I principi della dinamica
I principi della dinamica sono tre leggi che Newton introdusse con l’intento di descrivere come le
forze siano collegate ai moti dei corpi (senza considerare i moti di rotazione dei corpi attorno a loro
stessi). Sono leggi derivate dall’esperienza e l’osservazione, non sono teoremi derivabili da definizioni
date precedentemente, per questo le chiamiamo principi. Essi sintetizzano il lavoro fatto dai pensatori
del 1600, Galilei e Newton sopratutto, e pongono le basi per la costruzione della fisica moderna, la
meccanica in particolare.
1.3.1
Primo principio della dinamica
“Lex I: Corpus omne perseverare in statu suo quiescendi vel movendi uniformiter in directum, nisi
quatenus a viribus impressis cogitur statum illum mutare” (Newton, 1687)
Il primo principio della dinamica dice che ogni corpo non soggetto a forze persevera nel suo stato
di quiete o di moto rettilineo uniforme. In altre parole, se la somma di tutte le forze agenti su un
corpo è nulla esso rimarrà nel suo stato di quiete o di moto rettilineo uniforme, e viceversa
~
R(=
n
X
F~i ) = ~0 ⇐⇒ ~v = ~k
(1.3.1)
i=1
Il primo principio della dinamica, che fu proposto in termini non formali già da Galilei, è di fondamentale importanza per la fisica moderna in quanto introduce il concetto di equilibrio di un punto
materiale; è chiamato anche principio d’inerzia: si definisce inerzia infatti la proprietà dei corpi che
Francesco Saitta, Pordenone Febbraio 2017
15
CAPITOLO 1. MOTI E DINAMICA
si oppone ad un cambiamento dello stato di moto del corpo stesso. Nella discussione fatta da Newton
è implicito il concetto di sistema di riferimento inerziale che nell’idea dello scienziato britannico si
definisce come il sistema di riferimento all’interno del quale valgono i principi della dinamica. Questi
sistemi sono tutti i sistemi in stato di quiete o di moto rettilineo uniforme l’uno rispetto all’altro.
In questo senso ancora una volta la fisica che propone Newton si pone in continuità con la fisica di
Galileo: circa cinquant’anni prima di Newton Galileo propose il suo principio di relatività (che noi
studieremo nel prossimo capitolo), il quale diceva che tutte le leggi della fisica devono avere la stessa
forma in sistemi di riferimento inerziali tra loro.
Esempi ed applicazioni
• Se siamo seduti in un’automobile che inizia a frenare, ci sentiamo spingere in avanti; in realtà è
la nostra inerzia che si manifesta: tendiamo a continuare a muoverci di moto rettilineo uniforme!
• Se pensiamo a dover mantenere la velocità costante andando in bicicletta capiamo bene di dover
imprimere una forza sui pedali. Questa forza, secondo il primo principio della dinamica, deve
essere esattamente uguale ed opposta alla forza d’attrito che si sviluppa tra le ruote ed il terreno
e tra la bicicletta, il ciclista e l’aria.
• Un esempio particolarmente importante di sistema di riferimento che normalmente approssimiamo come sistema inerziale è dato dalla terra stessa: perché valgano i principi della dinamica
tutti gli esperimenti che facciamo ogni giorno nei nostri laboratori devono essere fatti in sistemi
di riferimento inerziali! Ma come possiamo giustificare questa approssimazione dato il fatto che
conosciamo il moto di rivoluzione della terra attorno al sole e dunque sappiamo che la terra ha
una certa accelerazione centripeta? Calcolando l’accelerazione centripeta della terra nella sua
rivoluzione intorno al sole e nella rotazione intorno a se stessa possiamo notare come queste
accelerazioni abbiamo intensità molto piccole, per lo meno rispetto ai tempi tipici della maggior
parte degli esperimenti che possiamo immaginare di fare in un laboratorio.
1.3.2
Secondo principio della dinamica
“Lex II: Mutationem motus proportionalem esse vi motrici impressae, et fieri secundum lineam rectam
qua vis illa imprimitur.” (Newton, 1687)
Il secondo principio della dinamica dice che l’accelerazione di un punto materiale è direttamente proporzionale alla somma delle forze su di esso impresse. La relazione matematica tra le due grandezze
è dunque
n
X
~
R(=
F~i ) = m~a
(1.3.2)
i=1
Il secondo principio della dinamica mette in evidenza la relazione tra accelerazione e forza: la forza
applicata ad un punto materiale è la causa dell’accelerazione del punto materiale stesso. Dal punto di
vista concettuale questa legge è importante per due motivi:
• è la prima legge fisica che parla di come una causa si relaziona con il suo effetto, caratteristica
che diventa distintiva della fisica moderna dandole la capacità di predire fenomeni e non solo
descriverli,
• definisce la massa di un punto materiale come la sua inerzia, la caratteristica che si oppone al
cambiamento dello stato di moto.
Francesco Saitta, Pordenone Febbraio 2017
16
CAPITOLO 1. MOTI E DINAMICA
Esempi ed applicazioni
• Il peso è una delle prime forze cui applichiamo la seconda legge della dinamica per concludere
che ~g , il vettore che siamo stati abituati a moltiplicare alla massa per ottenere la forza peso è
certamente un’accelerazione, giustificando formalmente il suo utilizzo nei moti di caduta libera
e parabolici.
• I produttori di automobili spesso fanno pubblicità mostrando i tempi in cui le autovetture
raggiungono velocità elevate: ad esempio la Ferrari 2011 FF “può andare da 0 a 100 km/h
in 3,7 secondi”. Questa frase si riferisce all’accelerazione, la compagnia ci sta semplicemente
2
dicendo che l’accelerazione che può raggiungere la macchina è a = 27,8−0
3,7 = 7, 5 m/s . Da questa
informazione, sapendo che un’automobile del genere ha una massa m = 1800 kg possiamo cercare
di capire quanta forza deve imprimere il motore V12 della ferrari sulla macchina stessa per fornire
quest’accelerazione (senza considerare gli attriti...) F = ma = 13524 N, poco meno della forza
necessaria ad alzarla completamente (P = mg = 17640 N)!!
• Ricordiamo come le forze siano grandezze vettoriali e come quindi spesso siamo obbligati ad
operare in due o tre dimensioni, scomponendo le forze in componenti perpendicolari tra loro.
Basta risolvere il seguente problema, che fa riferimento alla figura (1.12) per rendersene conto:
Una valigia ha una massa m = 10kg e viene trainata dal suo proprietario con una forza F =
50 N con una direzione che forma un angolo α = 60◦ rispetto all’orizzontale; supponendo un
coefficiente d’attrito k = 0, 2 tra la valigia e il pavimento, si calcoli l’accelerazione della valigia.
Figura 1.12: Esempio 3
1.3.3
Terzo principio della dinamica
“Lex III: Actioni contrariam semper et æqualem esse reactionem: sive corporum duorum actiones in
se mutuo semper esse æquales et in partes contrarias dirigi.” (Newton, 1687)
Il terzo principio della dinamica dice che se un punto materiale A imprime una forza F~1 su un punto
materiale B, allora il punto materiale B imprimerà una forza F~2 uguale e contraria ad F~1 sul punto
materiale A, vale cioè la relazione
F~1 = −F~2
(1.3.3)
Francesco Saitta, Pordenone Febbraio 2017
17
CAPITOLO 1. MOTI E DINAMICA
Un elemento particolarmente importante da evidenziare parlando del terzo principio della dinamica è
dato dal fatto che le due forze F~1 ed F~2 devono agire lungo la stessa direzione ma non sono applicate
allo stesso corpo, per cui non si annullano ma generano accelerazione sui due punti materiali coinvolti
(~a1 ed ~a2 ). Il terzo principio della dinamica introduce per la prima volta nella storia della scienza il
concetto di forze a distanza: esso si applica anche se i due punti materiali non sono in contatto l’uno
con l’altro. L’intuizione degli esseri umani suggerisce l’esistenza delle forze come forze di contatto, in
natura invece troviamo molte forze che agiscono a distanza e che studieremo nel dettaglio nel corso
degli anni di liceo come ad esempio la forza gravitazionale e quella elettrostatica.
Esempi ed applicazioni
• Per poter correre in avanti dobbiamo spingere con il piede all’indietro!!! Come è possibile? Per il
terzo principio della dinamica se il piede spinge all’indietro il pavimento (o il blocco di partenza
per le corse di atletica leggera), il pavimento risponderà con una forza uguale e contraria sul
piede, effetto della quale sarà l’accelerazione in avanti del corridore.
• Immaginiamo di pesarci sulla bilancia premendo con una scopa sul soffitto. La bilancia peserà
una forza maggiore della nostra forza peso, perché la stessa forza con cui premiamo sul soffitto
verso l’alto viene impressa dal soffitto su di noi verso il basso, andando a sommarsi al nostro
peso nella misurazione della bilancia.
• Se immaginiamo di essere sui pattini di fronte ad un muro e spingerci in avanti con le mani
sul muro siamo sicuri di iniziare a muoverci all’indietro. Anche questa situazione può sembrare
assurda, ma non è nient’altro che nuovamente l’applicazione del terzo principio della dinamica.
1.3.4
Sistemi di riferimento non inerziali
Sistemi non inerziali si definiscono come sistemi accelerati gli uni rispetto agli altri. Nel prossimo
capitolo entreremo nel merito dei ragionamenti che vennero fatti dagli scienziati dei secoli scorsi
per definire un sistema inerziale o non inerziale in senso assoluto e non in relazione ad un altro
sistema, mentre in questo paragrafo ci limitiamo a far notare come i tre principi della dinamica
valgano solo all’interno di sistemi inerziali. Prendendo in considerazione sistemi non inerziali infatti
sembrano accadere strani fenomeni dal punto di vista della meccanica newtoniana, in particolare
sembrano esistere delle accelerazioni senza nessuna forza che le causi. Pensiamo ad esempio alle
seguenti situazioni
• l’accelerazione che percepiamo se l’automobile in cui ci troviamo sterza di colpo, frena o accelera
• l’accelerazione che percepiamo stando su una giostra rotante (come il tagadà del luna park)
• l’accelerazione che percepiamo quando l’ascensore parte verso l’alto o verso il basso
In ognuno di questi fenomeni percepiamo delle accelerazioni, e le misuriamo fisicamente, senza che
nessuna forza agisca su di noi direttamente. Sembra quindi non valere il secondo principio della
dinamica! Riflettendo su questi fenomeni, come descriveremo nel dettagli nel capitolo 2, possiamo
capire che queste accelerazioni sono in realtà l’effetto della descrizione del fenomeno da un sistema
di riferimento in accelerazione, causate sostanzialmente dalla nostra inerzia. Per descrivere questi
effetti restando nel formalismo newtoniano la comunità scientifica ha scelto di introdurre delle forze
cosiddette apparenti, che sono la causa dell’accelerazione che percepiamo in sistemi di riferimento
accelerati. Esempi di queste forze, già descritte nel biennio, sono la forza centrifuga o la forza di
Coriolis.
Francesco Saitta, Pordenone Febbraio 2017
18
CAPITOLO 1. MOTI E DINAMICA
1.4
1.4.1
Work and Energy
Mechanical work
The term ”work” that we use in our everyday language has a meaning that we all know and understand;
in science instead this is a specific word related to the action of a force on a body. We know that the
action of a force on a body is the cause for the accelleration of the body itself: it means that the body
changes its state of motion under the effect of forces, it moves in a particular way, with an acceleration
~a = F~ /m (with ~a the acceleration of the body, F~ the sum of all the forces acting on the body, m the
mass of the body). The work done by the force F~ on the body is related to the connection between
the force and the space travelled by the body as a consequence of the action of F~ .
Work done by a constant force
In the simplest case in which the force is constant work is defined by the relation:
L = F~ · ~s,
where F~ is the constant force, ~s is the displacement of the body and the operation · is the scalar
product between the two vectors, it means that the equation (1.4.1) can be written as
L = F s cos α,
where α is the angle between the two vectors F~ and ~s. At this point we can start asking ourselves
”what is the physical meaning of this quantity?”. To answer this question let’s have a look to the
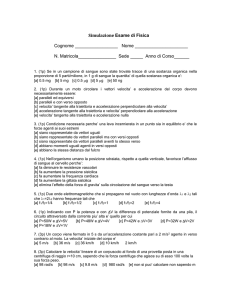
picture (1.13). In the picture there are four different situations:
1. in (A) we can see a body lying on a surface. There are two forces acting on this body, its
~ : since the weight is balanced by the normal
weight P~ , and the normal reaction of the surface, N
reaction, and the body is initially at rest, it is not cause of any motion. As a consequence, ~s = 0
and the work done by the weight equals zero.
2. in (B) we can see a body that is moving up (by means of an external force). Since the weight is
acting to the bottom and the displacement is towards the top, α = π, cos α = −1, so the work
done by the weight it will be negative: the weight is acting against the displacement of the body.
3. in (C) we can see a body that is moving down (by means of its weight). Since the weight is
acting to the bottom, as the displacement, α = 0, cos α = 1, so the work done by the weight it
will be positive: the weight is acting for the displacement of the body.
4. in (D) we can see a body that is moving horizzontally (by means of an external force). Since
the weight is acting to the bottom, and the displacement is horizontal α = π/2, cos α = 0, so
the work done by the weight it will be zero: the weight has nothing to do with the displacement
of the body.
In this example we can understand how mechanical work is a physical quantity that measures the
relation between a force acting on a body and the displacement of the body itself. We will use L (the
italian way) or W (the english way) to indentify mechanical work. Mechanical work is measured in
Joule (J): one Joule is the work done by a force with strenght of 1 N causing a displacement of 1 m
along the direction of the force: 1J = 1N · 1m.
Francesco Saitta, Pordenone Febbraio 2017
19
CAPITOLO 1. MOTI E DINAMICA
Figura 1.13: work done by a constant force
Work done by a force varying on space
Let’s now investigate how to calculate the work done by a force varying on space: we assume a force
F~ (s) acting on a body, with a constant angle α between the force and the displacement. In such a case
we cannot apply the previous formula, we do not know which value of F has to be put into F scos(α),
since it is varying. The trick to solve the problem is to consider many tiny works and then sum all of
them. Indeed, if we divide the displacement in many tiny pieces, d~s (where d, instead of ∆ mean that
our segments are negligible with respect to the total lenght of the displacement), in each of them we
can consider the force constant, and use F~ · d~s to find a work dL. Then we have to ”sum” al these
tiny works. This is a well known operation in math, called integral, that we are not going to study
in mathematical detail at this point. This mathematical concept is important even if we will not see
tecnical details of the calculation, to understand a geometrical way to calculate the work done by a
force varying on space: the area under the function F cos(α) (as a function of the displacement) in a
s-F cartesian graph. Let see figure (1.14): this is the geometrical representation of the work done by
the force F~ , causing the displacement ~s (from 1 to 7 units) (we assume the angle α between F~ and ~s
as a constant). In the picture is clear that if we consider a tiny ds the force can be considered constant
(with strenght F ∗ cos(α) in our example) and the area between the function and the s-axis is the area
of the rectangle with basis ds and height F ∗ cos(α): the work done by the ”constant” force F ∗ cos(α)
along the displacement ds! Then, the work done along the displacement s, it will be the area between
the function F cos(α) and the s-axis. At this point we know what is mechanical work and we know
Francesco Saitta, Pordenone Febbraio 2017
20
CAPITOLO 1. MOTI E DINAMICA
Figura 1.14: work done by a force varying on space
how to calculate it: in next paragraphs we will calculate the work done by two well known forces: the
gravitational force and the elastic force.
Work done by the gravitational force
The first force we analize is the gravitational force acting on a point particle with mass m: F~ = m~g .
Gravitational force is a constant force, always acting on the vertical line connecting the point particle
to the ground. Figure (5.4) describes four different situations:
• in (A) we can see that if the point particle moves horizzontally by means of an external force
the work done by the gravitational forces equals zero: the gravitational force has nothing to do
with that displacement.
• in (B) we can see that if the point particle is moving up vertically by means of an external force,
the work done by the gravitational force is negative (the work is done ”against” the gravitational
force) and equals the quantity −mgh, where h is the difference in height between the ground
and the final position of the point particle.
• in (C) we can see that if the point particle is moving down vertically by means of the gravitational
force, the work done by the gravitational force is positive(the work is done by the gravitational
Francesco Saitta, Pordenone Febbraio 2017
21
CAPITOLO 1. MOTI E DINAMICA
force) and equals the quantity mgh, where h is the difference in height between the ground and
the initial position of the point particle.
• in (D) we can see that even if the displacement is not along the vertical line connecting the initial
point and the ground the work done by the gravitational force is again mgh! This is because of
the scalar product that defines mechanical work.
We can conclude that it doesn’t matter what is the trajectory done by the point particle, the work
done by the gravitational force does not depend on it, but only on the initial and final heights and
the difference between them: LP~ = mg(hi − hf ).
Francesco Saitta, Pordenone Febbraio 2017
22
CAPITOLO 1. MOTI E DINAMICA
Figura 1.15: work done by the gravitational force
Francesco Saitta, Pordenone Febbraio 2017
23
CAPITOLO 1. MOTI E DINAMICA
Work done by elastic force
The elastic force is the tipical force varying on space: F~e = −k~s. So, to calculate the work done by
this force we have to look at the graph Fe − s, since the angle α is always constant α = π and on
the graph we will plot Fe cos(α) = −F = ks, or F = −ks. We can see from picture (1.16) that the
work done by the elastic force is obtained by the area of the trapezoid defined by the function Fe :
L = (B+b)∗h
= 12 ks2i − 21 ks2f . Thinking on a spring we can say that the elastic force does work trying
2
Figura 1.16: work done by the elastic force
to bring the spring back to the equilibrium position, and each compression or extension of it is done
by an external force that works ”against” the elastic force.
1.4.2
Conservative forces
In this section we define conservative forces: it is a very important concept in physics, and we will
find it in almost all the topics we will study in these years. A force is defined to be conservative
if the work done by it does not depend on the path travelled from the point particle. In
other words, a force is defined to be conservative, if the work done to bring a point particle from a
point A to a point B depends only on the two points A and B. The two forces we studied in previous
paragraphs, they are conservative! Indeed
LP~ = mghi − mghf ,
1
1
LF~e = ks2i − ks2f ,
2
2
the work depends just on si and sf , not on the path done by the point particle. In next paragraphs
we will introduce energy, and it will be clear the importance of a conservative force in physics.
Francesco Saitta, Pordenone Febbraio 2017
24
CAPITOLO 1. MOTI E DINAMICA
1.4.3
Energy
In science energy is defined as the ability of a physical system to do work. What does it mean?
It means that a system has to ”contain” energy in order to do work, and any time a system (the
forces inside the system) does work, it spends energy. Energy is a sort of scientific-money to do work.
with this definition it is clear that energy has the same unit than work, Joule. In next sections we
will analize three different energies arising from the forces we studied before: generic constant force,
gravitational force, elastic force.
Kinetic energy
Let’s analize the following situation (fig.(1.17)): a point particle moving with constant velocity starts
to be under the effect of a constant force F~ : the effect will be that the point particle will move
with a uniformly accelerated motion, with initial velocity vi . Since the particle is moving the force
1
a(∆t)2 +vi ∆t
v −v
will do work: L = F~ · ~s = F s = ma(sf − si ) = m f i (sf − si ) = m(vf − vi ) 2
=
∆t
m(vf − vi )( 21 a∆t + vi )
m(vf − vi )( 21 (vf
(v +v )
− vi ) + vi ) = m(vf − vi ) f 2 i = 12 m(vf2
motion sf = 21 a(tf −ti )2 +vi (tf −ti )+si ,
∆t
− vi2 )
=
(here we used
vf = a(tf −ti )+vi ).
the equation of the uniformly accelerated
This calculation suggests us that the energy used by the force to accelerate the particle equals the work
done; since this energy is the difference between the quantity 12 mv 2 at the end and at the beginning of
our situation, we can argue that every point particle moving with a certain speed v it has a ”Kinetic”
energy K = 12 mv 2 (in italian we will use Ec ). Every time a point particle is accellerated by an external
force the particle acquires kinetic energy, following the Kinetic energy theorem:
L = ∆K = Kf − Ki
.
Figura 1.17: Kinetic energy theorem
Francesco Saitta, Pordenone Febbraio 2017
25
CAPITOLO 1. MOTI E DINAMICA
Gravitational energy
We have already seen that the work done by the gravitational force equals mghi −mghf : we can define
gravitational energy as Ug = mgh, where h is the spatial coordinate of the point particle referred to its
height. We notice that the possibility to define an energy for the gravitational force here depends on
the fact that the gravitational work depends only on the initial and the final position of the particle:
since the gravitational force is conservative then we can define a gravitational energy! If the work is
done by the force, the gravitational energy is decreasing, if the work is done by an external force, the
gravitational energy is increasing:
L = −∆Ug
.
Figura 1.18: Gravitational energy
Elastic energy
We have already seen that the work done by the elastic force equals 12 ks2i − 12 ks2f : we can define elastic
energy as Ue = 21 ks2 , where s is the spatial coordinate of the point particle referred to its distance
from the equilibrium point. We notice that the possibility to define an energy for the elastic force
depends again on the fact that the elastic work depends only on the initial and the final position of
the particle: since the elastic force is conservative then we can define an elastic energy! If the work is
Francesco Saitta, Pordenone Febbraio 2017
26
CAPITOLO 1. MOTI E DINAMICA
done by the force, the elastic energy is decreasing, if the work is done by an external force, the elastic
energy is increasing:
L = −∆Ue
.
Figura 1.19: Elastic energy
1.4.4
Conservation of mechanical energy
All the energies related to conservative forces are called potential energies: them are the energies
that allow a force to do some work, kinetic energy instead is the energy gained (or lost) by the point
particle under the effect of a force acting on it. An important characteristics of potential energies is
that they all depends only on the position of the point particle. As written in the previous pictures,
in presence of a conservative force it holds: L = −∆U , so we can say that if a force is conservative
the work done on a closed path (the starting point coincides with the final one), the work done equals
zero: LA→A = 0. We are ready to enounce the theorem of conservation of mechanical energy: any
conservative physical system (a system in which all the forces are conservatives) has a
constant mechanical energy, Etot given by the sum of all the potential energies and the
kinetical energy in a given istant of time. It means that if a force is doing work on a point
particle, the force is losing potential energy, while the point particle is gaining kinetic energy. It can
be demostrated in few simple calculations:
LF~ =
LF~
n
X
F~i = −
i=0
Francesco Saitta, Pordenone Febbraio 2017
= ∆K,
n
X
∆Ui ,
i=0
27
CAPITOLO 1. MOTI E DINAMICA
∆K = −
n
X
∆Ui ,
i=0
∆K +
n
X
∆Ui = 0,
i=0
∆(K +
n
X
∆Ui ) = 0,
i=0
∆Etot = 0,
Etot = K +
n
X
∆Ui = const.
i=0
The simplest example of conservation of energy is described in figure 1.20. Consider a point particle
Figura 1.20: Conservation of mechanical energy
standing on the top of a double slide, as in figure:
• since it stands at a certain height h, it has a potential energy Ug = mgh; it means that the
gravitational force can do work: the work done when the point particle start falling along the
slide.
• Sliding down, the gravitational energy decreases, while kinetic energy increases (the point particle
accelerates under the effect of the gravitational force).
Francesco Saitta, Pordenone Febbraio 2017
28
CAPITOLO 1. MOTI E DINAMICA
• When the point particle is on the bottom of the slide, it has no more gravitational energy, which
all trasformed into kinetic energy 12 mv 2 . According to the conservation theorem the energy at
this point as to equal the initial energy, so Ugi = Kf , mgh = 12 mv 2 .
• The velocity gained by the point particle allows it to move up on the other side of the slice:
gravitational energy starts increasing, kinetic energy decreases (the point particle slows down
while going up)
• When all the initial kinetic energy does its work the point particle stops; at that point all the
kinetic energy transformed into potential energy: Ki = Ugf , 21 mv 2 = mgh.
The conservation of energy is very important theorem in physics basically for two reasons:
1. it gives us an invariant, a quantity that, under some hypothesis (conservative forces), is always
constant. It allows us to label a system: the system with energy 5J, 8J, ...
2. as we will see in paragraph (1.4.6), it is a useful tool to solve problems in a simpler way than
the study of kinematics of point particles
1.4.5
Work done by non-conservative forces
The tipical example of non-conservative force is friction. Friction is a non conservative force because
the work it does depends on the path travelled by the point particle: Fa = µF⊥ , LFa = −Fa s = −µF⊥ s.
Along a certain path friction does more work than a shorter one. Since friction is not a conservative
force, we cannot define a friction energy: friction always consumes energy of the system, never gains
it. In presence of a non conservative force Fnc , the conservation of mechanical energy does not apply,
but we can write:
∆Etot = LFnc .
1.4.6
Problem Solving
In this paragraph we will see how to set up a procedure to solve most of conservation of energy based
exercises.
1. First step: draw a schetch of the system to study;
2. Second step: draw in the schetch all the energies involved in all the important points of the
problem;
3. Third step: apply the conservation of energy at the different points.
Let’s apply the procedure on the follwing exercise:
A point particle of mass m = 10kg is free-falling from a height h = 10m. Find its speed the istant
before it hurts the floor. Following our steps:
Francesco Saitta, Pordenone Febbraio 2017
29
CAPITOLO 1. MOTI E DINAMICA
Figura 1.21: First step: The draw of our system
Figura 1.22: Second step: The draw of our system with all the energies involved
Figura 1.23: Third step: The application of the conservation of energy
Francesco Saitta, Pordenone Febbraio 2017
30
CAPITOLO 1. MOTI E DINAMICA
√
The solution of the problem (vf = 2gh) is the same if we apply kinematics (as we saw last year and
at the beginning of this one), but using conservation of energy is much faster an simpler!
1.4.7
Power
We define Power as the physical quantity given by the ratio between the work done by a force and
the time taken to make the work:
L
Pm =
(1.4.1)
∆t
This physical quantity is measured in Watt (1 W=1 J/s), and tells us the capacity of a force to do
a certain amount of work in a given period of time. If we think that this work is done on a point
particle we can find a relationship between the average power, the average force acting on the point
particle and its average velocity:
Pm =
=
L
∆t
F~m · ∆~s
∆t
∆~s
= F~m ·
∆t
= F~m · ~vm
The istantaneous power is then the average power when the time interval ∆t is tiny with respect to
the phenomenon we are considering, in such a way that the average force becames the istantaneous
force and so the velocity:
P = F~ · ~v
(1.4.2)
We can interpret power as the energy consumed or provided per unit of time.
A simple example Two runners with the same mass m = 70 kg reach the same velocity vf = 10
m/s from a standing start. They both make L = ∆Ec = 3500 J of work; we say that the runner
A, who reaches the velocity v in 10 seconds is much powerful than the runner B who reaches the
velocity v in 20 seconds: the power consumed by A is PA = 350 W, while the power consumed by B
is PB = 175 W. The work done by the two runners is the same but the power is different.
1.4.8
The Feynman point of view
The approach we used in these paragraphs to the topic of work and energy is the typical approach used
in italian high schools: starting from the definition of work, then talking about energy, the theorem of
conservation of mechanical energy to get finally to the conservation of total energy (at the fourth year
of high school) studying heat and thermodynamics. But it is not the only possible way to introduce
this topic. For example, the great physicist Richard Feynman (New York, 1918 - Los Angeles, 1988) in
his famous lectures uses a completely different approach. In the chapter “What is energy?” Feyman
writes:
There is a fact, or if you wish, a law, governing natural phenomena that are known to date. There is
no known exception to this law; it is exact, so far we know The law is called conservation of energy;
it states that there is a certain quantity, which we call energy, that does not change in manifold
changes which nature undergoes. That is a most abstract idea, because it is a mathematical principle;
it says that there is a numerical quantity, which does not change when something happens. It is not a
description of a mechanism, or anything concrete; it is just a strange fact that we can calculate some
Francesco Saitta, Pordenone Febbraio 2017
31
CAPITOLO 1. MOTI E DINAMICA
number, and when we finish watching nature go through her tricks and calculate the number again, it
is the same (Feynman, 2001).
Physicists are very fond of this type of setting because energy conservation is really a very important
principle and this aproach does not bind energy to the work of a force like we did. In this case, the
work of a force becomes a possible form of energy, as well as heat, internal energy (which we will
study in thermodynamics) or electromagnetic energy. The approach is interesting and useful, and all
the formulas and concepts that we have just described can also be derived from this idea. Among
many positive aspects there is also a lack in Feynman’s approach: it is hard to see what difference
there is between energy and whatever else is preserved, such as mass or electric charge, for example.
Although our approach is different from this, it is interesting to note, however, as in science there may
be different ways to think and to present its fundamental concepts.
1.5
Meccanica dei fluidi
Nel biennio abbiamo studiato la fluidostatica, ovvero la parte della fisica che studia i fluidi nei loro stati
di equilibrio. Quello che faremo in questo paragrafo è di considerare fluidi in movimento, applicando
le conoscenze che abbiamo della fisica fuori equilibrio che abbiamo ripreso ed approfondito in questo
primo capitolo al caso dei fluidi. Prima di entrare nei dettagli della meccanica dei fluidi riprendiamo
brevemente i concetti principali della fisica dei fluidi in equilibrio.
Fluido Definiamo fluido una sostanza che si trovi in uno stato fisico non dotato di forma propria.
Possiamo per il momento immaginare che fluido è una qualsiasi sostanza che non si trovi allo stato
solido. Parleremo di fluidi incomprimibili in presenza di un fluido a densità costante (ρ = m/V = cost).
Pressione Definiamo come pressione P la grandezza fisica che si ottiene come rapporto tra il modulo
della forza perpendicolare F~⊥ agente su una superficie e l’ampiezza A della superficie stessa:
P =
F⊥
A
L’unità di misura della pressione nel sistema internazionale si chiama Pascal (Pa): un Pascal è la
pressione esercitata da una forza di un Newton che agisce perpendicolarmente su una superficie di un
metro quadrato: 1Pa=1N/1m2 .
Fluido in equilibrio Diremo che un fluido è in equilibrio se, presa comunque una superficie aperta3
all’interno del fluido, la pressione esercitata su un lato della superficie è uguale alla pressione esercitata
sull’altro lato della superficie.
Principio di Pascal Il principio di Pascal asserisce che in un fluido in equilibrio una variazione di
pressione in un certo punto del fluido viene trasmessa inalterata a tutto il fluido, in tutte le direzioni
fino alle pareti del contenitore in cui il fluido è contenuto.
Pressione idrostatica e legge di Stevino Definiamo pressione idrostatica la pressione in un fluido
incomprimibile dovuta alla gravità: un certo fluido che si distribuisce su diverse altezze (o profondità)
risentirà della forza di gravità che la parte di fluido più in alto imprime sulla parte più bassa. Esisterà
3
si definisce aperta una superficie per cui non si riesca a definire un interno od un esterno alla superficie. Immaginiamo
per esempio un fazzoletto rettangolare o circolare; la superficie di una sfera invece non è aperta.
Francesco Saitta, Pordenone Febbraio 2017
32
CAPITOLO 1. MOTI E DINAMICA
quindi una differenza di pressione a diverse altezze dovuta alla gravità, che possiamo trovare grazie
alla legge di Stevino:
∆p = ρgh
(1.5.1)
dove ρ è la densità del fluido, g l’accelerazione di gravità ed h il dislivello tra i due punti tra cui stiamo
calcolando la differenza di pressione.
Principio di Archimede Il principio di Archimede asserisce che un corpo immerso in un fluido
riceve una spinta dal basso verso l’alto (la spinta di Archimede appunto), pari al peso del liquido che
occuperebbe il volume del corpo immerso nel fluido. Questo principio, su cui abbiamo ragionato molto
nel primo anno di liceo, non porta molte conseguenze rispetto alla meccanica dei fluidi per come la
studieremo qui, ma è stato riportato per avere un riferimento completo dei concetti visti nel biennio
per quanto riguarda l’equilibrio dei fluidi.
1.5.1
Fluidi in moto
Descriveremo fluidi in moto tramite il moto delle particelle di cui immaginiamo essi siano composti,
più nello specifico noi ci riferiremo ad elementi di fluido: immagineremo cioè di suddividere il fluido in
moltissimi volumi molto piccoli dV che si muovono formando nell’insieme il moto completo del fluido.
La descrizione dei moti di un fluido può essere molto complessa sia dal punto di vista concettuale
che matematico, e proprio per questo motivo faremo delle approssimazioni che ci aiuteranno nella
comprensione e descrizione di questi fenomeni. La descrizione di moti reali dei fluidi poi potrà essere
più o meno fedele a queste approssimazioni, richiedendo in alcuni casi delle descrizioni più complesse
che però non tratteremo durante il corso del liceo. Le approssimazioni che facciamo per studiare fluidi
in movimento sono:
1. Considereremo solo fluidi incomprimibili
2. Considereremo solo fluidi non viscosi (trascureremo quindi gli attriti interni del fluido stesso)
3. Considereremo solo moti stazionari, ovvero moti in cui la velocità di un elemento di fluido
resta costante nello spazio v = v(~r)
4. Considereremo solo moti irrotazionali, ovvero moti in cui non esistono elementi di volume del
fluido in cui la traiettoria di un elemento di fluido sia circolare
In particolare chiameremo fluidi ideali i fluidi che soddisfano alle condizioni (1) e (2).
1.5.2
Equazione di continuità
La prima conseguenza delle richieste di approssimazione fatte nel paragrafo precedente è l’equazione
di continuità. Immaginiamo di avere un fluido che scorre all’interno di un tubo orizzontale che varia
la sua dimensione trasversale. Diciamo che, come rappresentato in figura (1.24) la sezione passi da
un certo valore S1 ad un altro valore S2 , S1 < S2 . Immaginiamo ora un certo volume V di fluido
incomprimibile che attraversi la superficie S1 in un intervallo di tempo ∆t: per l’incomprimibilità del
fluido uno stesso volume V nello stesso intervallo di tempo ∆t dovrà attraversare anche la superficie
S2 . Immaginando che il volume sia distribuito su tutta la superficie con un’estensione longitudinale
molto piccola ∆x avremo che il volume che attraversa S1 è dato da V1 = S1 ∆x1 ed il volume che
Francesco Saitta, Pordenone Febbraio 2017
33
CAPITOLO 1. MOTI E DINAMICA
Figura 1.24: Flusso di un fluido attraverso due superfici differenti S1 ed S2
attraversa la superficie S2 è dato da V2 = S2 ∆x2 . Si avrà dunque
V1
∆t
S1 ∆x1
∆t
∆x1
S1
∆t
V2
∆t
S2 ∆x2
=
∆t
∆x2
= S2
∆t
=
E dunque, immaginando le estensioni longitudinali molto piccole, cosı̀ come l’intervallo di tempo di
attraversamento molto piccolo possiamo scrivere l’equazione di continuità:
Q = Sv = cost
(1.5.2)
Questa semplice equazione dà importanti informazioni sul moto dei fluidi incomprimibili: velocità del
fluido e sezione attraversata sono inversamente proporzionali, un fluido ideale, per evitare “ingorghi”
deve avere velocità maggiori man mano che attraversa sezioni più piccole! La quantità Q = Sv si
chiama portata e si misura in m3 /s ed è una costante nel moto di fluidi ideali.
1.5.3
Teorema di Bernoulli
Il teorema di Bernoulli è un’estensione della legge di equilibrio per i fluidi e rende conto in qualche
modo, come vedremo a breve, della conservazione dell’energia anche nel caso di fluidi in movimento.
Prendiamo in considerazione un fluido ideale che faccia un percorso in cui varia non solo la sezione
trasversale come nel caso precedente, ma che vari anche la sua altezza rispetto al livello del mare, come
in figura (1.25). Evidentemente per portare il fluido verso l’alto ci deve essere del lavoro esterno fatto
contro la forza di gravità che tenderebbe a spingere la massa di fluido verso il basso. Tale lavoro dovrà
essere uguale alla somma della variazione di energia cinetica del fluido e della variazione di energia
potenziale gravitazionale del fluido nei punti di attraversamento della superficie S1 e della superficie
S2 :
L = ∆Ec + ∆Ug
Analizzeremo quindi ogni elemento di questa equazione di conservazione dell’energia per ottenere
quello che chiameremo il teorema di Bernoulli. Sottolineiamo qui come per dimostrare questo teorema
stiamo usando un approccio “alla Feynman”, stiamo cioè assumendo che l’energia si conservi, ovvero
che il lavoro fatto dalle forze esterne al sistema bilanci esattamente la somma delle diverse energie
in gioco: la cosa è ragionevole visto che stiamo trascurando gli attriti interni al sistema, ma è pur
Francesco Saitta, Pordenone Febbraio 2017
34
CAPITOLO 1. MOTI E DINAMICA
Figura 1.25: Fluido in movimento in un percorso che varia sia la sezione che l’altezza
sempre un’assunzione che estende il concetto di campo gravitazionale conservativo e conservazione
dell’energia da un sistema di meccanica dei solidi ad un sistema di meccanica dei fluidi. Immaginiamo
quindi che un certo volume V di fluido attraversi la superficie S1 in un certo intervallo di tempo ∆t:
per l’incomprimibilità del fluido dovrà essere quindi che un volume V di fluido attraversi la superficie
S2 nello stesso intervallo di tempo.
Il lavoro L Il lavoro esterno L fatto sul fluido avrà due componenti: la prima L1 data dalla massa
di fluido che spinge il volume V che attraversa S1 dato da L1 = F1 ∆x1 , con ∆x1 lo spostamento
longitudinale del volume ed il lavoro L2 = F2 ∆x2 sulla superficie S2 subito dalla massa di fluido che
si trova dopo la superficie S2 ; questi due lavori hanno segno opposto: prenderemo come positivo L1 e
negativo L2 immaginando che la massa di fluido si stia spostando da S1 ad S2 . Il lavoro totale sarà
dunque L = L1 − L2 = F1 ∆x1 − F2 ∆x2 . Per riscrivere in termini di pressione questo lavoro possiamo
moltiplicare e dividere L1 per S1 e moltiplicare e dividere L2 per S2 ottenendo l’espressione
L = p1 V1 − p2 V2 = (p1 − p2 )V
L’uguaglianza tra i due volumi può essere assunta sempre in virtù dell’incomprimibilità supposta del
fluido.
L’energia cinetica ∆Ec
La variazione di energia cinetica del fluido è data da:
1
1
1
1
1
∆Ec = m2 v22 − m1 v12 = ρ2 V2 v22 − ρ1 V1 v12 = ρV (v22 − v12 )
2
2
2
2
2
sempre utilizzando l’incomprimibilità del fluido.
L’energia potenziale gravitazionale ∆Ug La variazione di energia potenziale del fluido è data
quindi da:
∆Ug = m2 gh2 − m1 gh1 = ρV g(h2 − h1 )
con h2 ed h1 le altezze del volume di fluido attraversando rispettivamente S1 ed S2
Francesco Saitta, Pordenone Febbraio 2017
35
CAPITOLO 1. MOTI E DINAMICA
L’equazione di Bernoulli Mettendo ora assieme tutti i termini trovati possiamo scrivere la nostra
equazione nel seguente modo:
1
(p1 − p2 )V = ρV (v22 − v12 ) + ρV g(h2 − h1 )
2
Questa equazione esprime la conservazione dell’energia nel caso del fluido in movimento, ed è una prima
versione del teorema di Bernoulli. Notiamo come questa relazione possa essere riscritta portando al
primo membro tutti i termini relativi alla superficie S1 ed al secondo membro tutti i termini relativi
alla superficie S2 ottenendo
(p1 + ρv12 + ρgh1 )V = (p2 + ρv22 + ρgh2 )V
questa espressione mette in evidenza una quantità, che chiameremo anche pressione generalizzata,
ottenuta come somma della pressione del fluido, la densità di energia cinetica e la densità di energia
potenziale gravitazione, che rimane costante durante tutto il tragitto del fluido! Si ha quindi la legge
di conservazione:
1
p + ρv 2 + ρgh = cost
(1.5.3)
2
Questo risultato, ottenuto per la prima volta da Daniel Bernoulli (Groninga, 1700- Basilea, 1782), dice
come la pressione generalizzata, interpretabile come la densità di energia di un fluido in movimento,
rimanga costante lungo il percorso di un fluido ideale in moto stazionario ed irrotazionale. Il teorema
di Bernoulli, come vedremo in qualche semplice applicazione qui di seguito è alla base di moltissimi
studi ed applicazioni della meccanica dei fluidi.
1.5.4
Applicazioni
L’utilizzo dell’equazione di continuità e del teorema di Bernoulli permette la descrizione di moltissimi
fenomeni di moto dei fluidi, ed ha permesso nella storia della fisica lo studio e la produzione di
moltissimi strumenti ed apparati tecnologici che hanno a che fare con la fluidodinamica. Vedremo qui
di seguito tre applicazioni, la prima - l’effetto Venturi - tecnologica per la misura della portata di un
fluido, la seconda - la portanza - che mostra il principio base per il funzionamento degli aeroplani ed
infine alcune applicazioni in campo medico - gli aneurismi e le trombosi.
Tubo di Venturi
Giovanni Battista Venturi (Bibbiano, 1746 - Reggio Emilia, 1822) è stato il sacerdote e fisico italiano
che inventò uno strumento di misura della portata di un fluido in movimento. L’apparato sperimentale
inventato da Venturi è descritto in figura (1.26): esso è costituito da un tubo con due diverse sezioni
S1 ed S2 collegato ad un altro tubo ad U posto sotto al primo tubo che si collega ad esso nei punti
di sezione S1 ed S2 . All’interno del tubo con le due sezioni viene fatto passare orizzontalmente il
fluido di cui si vuole misurare la portata; il tubo ad U invece è un manometro in cui viene posto un
liquido che possa variare le sue altezze a seconda della differenza di pressione presente sui due rami
del manometro stesso. Venturi cercò una relazione tra la portata del fluido e la differenza di altezza
misurata dal manometro, conoscendo le due sezioni dello strumento. Infatti, per la legge di continuità
si ha che S1 v1 = S2 v2 , dunque la velocità del fluido che attraversa S2 è maggiore della velocità del
fluido che attraversa S1 ; questa differenza di velocità si manifesta in una differenza di pressione grazie
al teorema di Bernoulli, che viene misurata dal manometro. Otteniamo dunque la relazione che ci
permette di ottenere la portata in funzione di S1 , S2 e ∆h: considerando il tratto rettilineo del tubo
Francesco Saitta, Pordenone Febbraio 2017
36
CAPITOLO 1. MOTI E DINAMICA
Figura 1.26: Tubo di Venturi
di Venturi possiamo scrivere:
Q = S1 v1 = S2 v2
1
1
p1 + ρv12 = p2 + ρv22
2
2
1
1
p1 + ρ(Q/S1 )2 = p2 + ρ(Q/S2 )2
2
2
1
2
2
ρ[(Q/S1 ) − (Q/S2 ) ] = p2 − p1
2
Q2 S22 − Q2 S12
2(p2 − p1 )
=
ρ
S12 S22
2(p2 − p1 ) S12 S22
Q2 =
ρ
S22 − S12
s
2(p2 − p1 ) S12 S22
Q=
ρ
S22 − S12
A questo punto possiamo usare la legge di Bernoulli lungo il tubo ad U per scrivere che
p1 + ρgh1 = p2 + ρgh2
p2 − p1 = ρg(h1 − h2 )
E sostituire il risultato nell’ultima delle equazioni precedenti trovando la relazione desiderata:
s
Q=
Francesco Saitta, Pordenone Febbraio 2017
2g(h1 − h2 )
S12 S22
S22 − S12
(1.5.4)
37
CAPITOLO 1. MOTI E DINAMICA
Portanza
La portanza in fluidodinamica è la forza perpendicolare rispetto alla velocità relativa di un’ala di un
aereo o di un veicolo che si muove all’interno o sopra ad un fluido. Essa è di fondamentale importanza
per la stabilità del veicolo e per la sua capacità di viaggiare. Studiamo in modo semplice la portanza nel
caso dell’ala di un aeroplano, facendo riferimento alla figura (1.27). Vogliamo dare giustificazione del
Figura 1.27: Profilo di un’ala di aeroplano per lo studio della portanza
fatto che esiste una differenza p1 − p2 > 0 che genera una forza dal basso verso l’alto sulla superficie
dell’ala e che aiuta sostanzialmente l’aereo a volare. Per far questo ci richiamiamo al teorema di
Bernoulli per cui:
1
p1 − p2 = ρ(v22 − v12 ) + ρg(h2 − h1 )
2
Notiamo come, dato il profilo dell’ala (ecco l’importanza della forma dei profili in aerodinamica), l’aria
che passa sopra all’ala deve avere una velocità maggiore dell’aria che passa sotto all’ala, in quanto
deve percorre più spazio in meno tempo, sempre assumendo che non si formino moti vorticosi attorno
all’ala, cosa che si rivelerebbe pericolosa più che fastidiosa dal punto di vista del modello fisico; inoltre
h2 > h1 : ecco allora che - in dipendenza della densità dell’aria naturalmente - esiste una differenza di
pressione nella giusta direzione affinché l’aereo possa volare!
Aneurismi e Trombosi
In medicina si definiscono aneurismi le dilatazioni di vene o arterie dovute al cedimento delle pareti di
una di esse; il nostro intento qui non è quello di capirne le motivazioni o i rimedi, ma la fluidodinamica
del fenomeno per capire in che direzione potrebbe evolvere l’aneurisma secondo le regole della fisica.
In figura (1.28) vediamo lo schema di un possibile aneurisma: chiameremo S1 la superficie in cui
abbiamo evidenziato la velocità del sangue ~v1 ed S2 quella dove abbiamo evidenziato la velocità ~v2 .
Per l’equazione di continuità avremo evidentemente v2 < v1 . A questo punto possiamo applicare il
teorema di Bernoulli alla nostra vena (supponendo che sia in orizzontale o che la differenza di altezza
sia trascurabile viste le dimensioni del fenomeno in questione) ed abbiamo:
1
p1 − p2 = ρ(v22 − v12 ) ⇒ p1 < p2
2
Ovvero la pressione laddove la vena ha ceduto aumenta: il che significa che dal punto di vista medico
la fisica non tende a risolvere il problema, anzi, serve capire come poter intervenire per non peggiorare
il problema.
Francesco Saitta, Pordenone Febbraio 2017
38
CAPITOLO 1. MOTI E DINAMICA
Figura 1.28: Aneurisma
In medicina di definiscono trombi le ostruzioni di vene o arterie dovute al deposito di sostanze di
diversa origine. Evidentemente il fenomeno dal punto di vista fluidodinamico è l’esatto opposto del
precedente, ed è descritto dalla figura (1.29). Evidentemente, ricalcando la dimostrazione precedente,
Figura 1.29: Trombosi
in questo caso la pressione del fluido diminuisce in corrispondenza del trombo, facilitando il deposito
di ulteriore sostanza ed anche in questo caso favorendo il peggiorarsi del fenomeno patologico.
Francesco Saitta, Pordenone Febbraio 2017
39
CAPITOLO 1. MOTI E DINAMICA
1.6
Esercizi
Le equazioni del moto di un punto materiale, quando non specificato in modo diverso, si considerino
espresse con le unità di misura del sistema internazionale. Ad esempio s = 5t + 2 esprime lo spazio
in metri in funzione del tempo in un moto rettilineo uniforme, 5 rappresenta la velocità in metri al
secondo, 2 la coordinata iniziale in metri, t il tempo in secondi.
1. Si descriva il moto rettilineo di un punto materiale A rappresentato in figura (1), trovando i
moduli delle velocità dei diversi tratti di percorso del punto materiale. Qual è la velocità media
su tutto il percorso vm ? Quante volte si incontrerebbe il punto materiale A con il punto materiale B che parte nello stesso istante di A ma muovendosi costantemente alla velocità vB = vm ?
Figura 1.30: .
[v1 =2 m/s; v2 =0 m/s; v3 =2 m/s; v4 =3,3 m/s; v5 =0 m/s; v6 =2,2 m/s; vm =0,75 m/s; due
volte, escludendo il punto di partenza]
2. Due punti materiali A e B si stanno muovendo, secondo un sistema di riferimento fissato s con
le seguenti equazioni del moto: sA = 7t, sB = 7t + 5. I due punti materiali si incontreranno?
Perché?
[No, perché...]
3. Due punti materiali A e B si stanno muovendo, secondo un sistema di riferimento fissato s con le
seguenti equazioni del moto: sA = 7t, sB = −7t + 7. Dove (lungo s) e quando si incontreranno?
Si esprima la soluzione anche dal punto di vista geometrico disegnando il diagramma orario della
situazione.
[t=0,5 s; s=3,5 m]
4. Un calciatore A sta correndo in linea retta dalla sua area di rigore verso il centrocampo alla
velocità vA = 5m/s. Il portiere lancia la palla, sempre in linea retta, quando il calciatore A si
Francesco Saitta, Pordenone Febbraio 2017
40
CAPITOLO 1. MOTI E DINAMICA
trova a 30 metri dal punto in cui il portiere calcia il pallone. Se la palla raggiunge il giocatore si
trova a 60 metri dal punto in cui il pallone è stato calciato dal portiere, a che velocità il portiere
ha calciato il pallone? (Si approssimino i moti del calciatore e della palla con moti rettilinei
uniformi). Si descriva la situazione in un diagramma orario.
[vP =10 m/s]
5. A causa di un colpo di sonno, Gigetto chiude gli occhi alla guida, mentre l’auto si muove ad una
velocità vA = 80km/h verso un albero che si trova ad una distanza d = 120m. Quanto tempo
ha per svegliarsi, sapendo che una frenata a quella velocità necessita 30 metri per fermare l’auto?
[t=4,05 s]
6. Un’automobile da corsa raggiunge la velocità di 100 km/h in 3,0 secondi, partendo da ferma.
Quanto spazio ha percorso in questo tempo supponendo che la variazione della sua velocità sia
costante nel tempo?
[s=42 m]
7. Un punto materiale A si muove secondo l’equazione del moto sA = 10t2 + 2t − 3, mentre un
punto B sB = 5t + 3. Si incontreranno? Dove e Quando? Si esprima la soluzione anche dal
punto di vista geometrico disegnando il diagramma orario della situazione. Si siano le soluzioni
con 2 cifre significative.
[s=7,7 m; t=0,94 s]
8. Antonio (A) sta correndo alla velocità va = 7m/s. Barbara (B) inizia a ricorrere Antonio quando
questo si trova ad una distanza d = 30m. Quale accelerazione deve avere per raggiungere Antonio in 10s? Si esprima la soluzione anche dal punto di vista geometrico disegnando il diagramma
orario della situazione.
[aA =2 m/s2 ]
9. Un automobile sta viaggiando alla velocità vA = 72km/h quando a 50m un semaforo diventa
rosso. Se il tempo di reazione del guidatore è di mezzo secondo, qual è la minima accelerazione
che deve avere l’automobile per fermarsi al semaforo? Si esprima la soluzione anche dal punto
di vista geometrico disegnando il diagramma orario della situazione.
[a=-5 m/s2 ]
10. Due corridori A e B stanno correndo verso il traguardo appaiati ad una velocità v = 8m/s. A
30m dal traguardo il corridore A inizia ad accelerare e vince la gara per 0,50 secondi. Quanto è
stata la sua accelerazione media negli ultimi 30 metri?
[a=0,76 m/s2 ]
11. Un punto materiale A si muove secondo l’equazione del moto sA = 8t2 − t + 5, mentre un punto
B sB = −4t2 + 5t + 3. Si incontreranno? Dove e Quando? Si esprima la soluzione anche dal
punto di vista geometrico disegnando il diagramma orario della situazione. Si siano le soluzioni
con 2 cifre significative.
Francesco Saitta, Pordenone Febbraio 2017
41
CAPITOLO 1. MOTI E DINAMICA
[Non si incontreranno mai, perchè...]
12. Un punto materiale A si muove secondo l’equazione del moto sA = 8t2 − t + 3, mentre un punto
B sB = −4t2 + 5t + 5. Si incontreranno? Dove e Quando? Si esprima la soluzione anche dal
punto di vista geometrico disegnando il diagramma orario della situazione. Si diano le soluzioni
con 2 cifre significative.
[s=6,5 m; t=0,73 s]
13. I due fratelli Antonio (A) e Barbara (B) stanno facendo il seguente gioco: Antonio sta alla
finestra che si trova ad un’altezza h = 3m da terra, mentre Barbara si trova ad una distanza
d = 10m dal muro della finestra, Antonio lascia cadere una palla in verticale sotto l’effetto della
gravità, mentre Barbara lancia una palla orizzontalmente rasoterra verso il muro. Che velocità
deve avere la palla lanciata da Barbara affinché le due palle si scontrino?
[vP =13 m/s]
14. La giostra Columbia di Mirabilandia è definita come free fall tower: è una struttura alta 60m
che simula la caduta libera per chi si siede sulle poltroncine che salgono fino alla cima dell’attrazione. Supponendo di poter trascurare gli attriti, con quale velocità arrivano a terra le persone
che provano questa giostra?
[v=123 km/h]
15. Un altro gioco di Antonio (A) e Barbara (B) è il seguente: Antonio lancia una pallina rasoterra
con una certa velocità verso Barbara, la quale lascia cadere in verticale un’altra pallina cercando di colpire la pallina lanciata da Antonio. Supponendo che Antonio e Barbara siano ad una
distanza d = 3m e che la velocità con cui Antonio lancia la pallina sia vA =20cm/s, dopo quanto
tempo dal lancio della pallina del fratello Barbara deve lasciar andare la pallina dall’altezza
h = 1, 5m per riuscire nel gioco?
[t=14,7 s]
16. Considerando le dimensioni massime regolamentari di un campo da calcio e supponendo che un
portiere calci dando dalla palla una velocità iniziale formante un angolo α = 30◦ con l’orizzontale qual è il modulo minimo di questa velocità affinché il portiere faccia una rimessa dalla sua
area piccola che raggiunga la linea di fondo dell’altra metà campo? Qual è l’altezza massima
raggiunta dal pallone supponendo che la velocità iniziale sia questa velocità minima?
[v0 =129,6 km/h; hmax =7,7 m]
17. Alberto (A) e suo figlio Bruno (B) giocano a passarsi la palla colpendola di testa. Alberto è
alto hA =180 cm, mentre Bruno hB =150 cm. Alberto colpisce la palla con una velocità iniziale
v0 =2 m/s con un angolo rispetto l’orizzontale α = 45◦ e la palla cade esattamente sulla testa di
Bruno. A che distanza orizzontale si trovano i due?
[d=60 cm]
18. Qual è la velocità iniziale che un cestista deve dare alla palla per segnare un tiro libero, supponendo che l’angolo rispetto l’orizzontale del lancio sia α = 60◦ e che la palla si stacchi dalla mano
Francesco Saitta, Pordenone Febbraio 2017
42
CAPITOLO 1. MOTI E DINAMICA
del giocatore ad un’altezza h = 1, 95m. Si assumano le dimensioni regolamentari del campo da
pallacanestro.
[v0 =7,8 m/s]
19. Al giorno d’oggi (Marzo 2014) il record del mondo per il lancio del giavellotto misura d = 98, 48m,
ottenuto nel 1996 dall’atleta ceco Jan Zelezny 4 . Supponendo che l’altezza iniziale del giavellotto sia di un metro, e che l’angolo di tiro sia α = 30◦ , si trovi la velocità iniziale impressa dal
campione ceco nel tiro del record.
[v0 =33,4 m/s]
20. Alessandro vuole saltare un ostacolo alto h = 80 cm. Supponendo che si avvicini all’ostacolo
con una velocità v = 5 m/s e stacchi, mantenendo il modulo della sua velocità pari a v, con un
angolo rispetto l’orizzontale α = 60◦ ad una distanza d = 1 m dall’ostacolo. Alessandro riuscirà
a saltare l’ostacolo? Se si, quanto di quanto supera in altezza l’ostacolo quando ci si trova sopra?
Qual è l’altezza massima che raggiunge?
[Sı̀, supera l’ostacolo di 0,15 m; hmax =96 cm]
21. Antonio vuole lanciare un sasso oltre una siepe che sta di fronte a lui. Antonio si trova a 5
metri dalla siepe, che è alta 2 metri, e lancia il sasso lasciandolo andare quando si trova ad
un’altezza di 1,2 metri con una velocità di modulo v0 = 10 m/s che forma un angolo di 30 gradi
con l’orizzontale. Il sasso andrà oltre la siepe? Se sı̀, quanto sopra alla siepe passerà? A che
distanza dalla siepe toccherà poi terra?
[Sı̀, passa 0,5 metri sopra; d=5,6 m]
22. Un giocatore di calcio vuol mostrare la sua bravura colpendo la traversa con un calcio da 30
metri dalla linea di porta. Supponendo che l’angolo di tiro del giocatore sia α = 20◦ , qual è
la velocità che deve imprimere al pallone per riuscire nel suo intento? Si assuma l’altezza della
porta regolamentare, 2,44 metri.
[v0 = 24,2 m/s]
23. Due giocatori di golf sono uno di fronte all’altro ad una distanza d = 10 m l’uno dall’altro. Il
primo giocatore effettua un tiro dando alla palla una velocità iniziale v01 =50 m/s con un angolo
rispetto l’orizzontale α = 30◦ , mentre il secondo colpisce la sua palla dandole una velocità di
modulo v02 che forma un angolo β = 45◦ con l’orizzontale. Supponendo che i due colpi avvengano nello stesso istante, quale deve essere la velocità v02 affinché le due palline si colpiscano? In
tal caso, in quale punto avviene l’urto tra le palline (distanza dal primo giocatore d1 ed altezza
da terra h)?
[v02 =35,4 m/s; d1 =6,5 m; h=3,6 m]
24. Un pompiere deve spegnere il fuoco che divampa da una finestra che si trova a 10 metri in
orizzontale e 5 in verticale rispetto la sua posizione. Supponendo che l’angolo con cui il pompiere punta la bocca del tubo dell’acqua sia α = 60◦ rispetto l’orizzontale si trovi la velocità
iniziale che deve avere l’acqua affinché il pompiere riesca a centrare la finestra e spegnere il fuoco.
4
http://www.iaaf.org/records/by-discipline/throws/javelin-throw/outdoor/men
Francesco Saitta, Pordenone Febbraio 2017
43
CAPITOLO 1. MOTI E DINAMICA
[v=12,5 m/s]
25. Lasciando suonare un vecchio disco 45 giri per un’ora, quanto angolo è stato spazzato da uno
dei raggi del disco? Lo si esprima sia in radianti che in gradi.
[α = 17 rad ∼ 974◦ ]
26. Un ragazzo lancia un sasso ad una distanza d = 100 metri con velocità iniziale orizzontale da
un’altezza h = 3 metri dal suolo ottenuta facendo ruotare uno spago lungo l = 20 cm con un
moto circolare uniforme. Si calcoli la frequenza con cui deve ruotare lo spago per ottenere un
lancio del genere.
[f=102 Hz]
27. Si calcoli l’accelerazione centripeta e la velocità tangenziale di un oggetto sulla superficie terrestre approssimando la terra ad una sfera che ruota attorno ad un suo diametro.
[ac = 3, 38 × 10−2 m/s2 ; v = 470 m/s]
28. Si calcolino le frequenze fm ed fs della lancetta dei minuti e dei secondi delle lancette di un orologio a parete. Si calcolino inoltre le velocità angolari ωm , ωs delle due lancette e le accelerazioni
centripete di due punti delle lancette entrambi ad una distanza d = 5cm dal centro.
[fm =2,8×10−4 Hz; fs =0,17 Hz; ωm =1,7×10−3 rad/s; ωs =0,1 rad/s; am =1,4×10−7 m/s2 ; as =5×10−4
m/s2 ]
29. Si trovi l’equazione del moto di un moto armonico con ampiezza 350 cm, pulsazione 5 rad/s e
fase π usando le unità standard del sistema internazionale. Si calcoli la posizione iniziale del punto materiale di cui è descritto il moto. Si calcoli la velocità massima del moto del punto materiale.
[s=3,5cos(5t+π); s0 =-3,5 m; vmax =17,5 m/s]
30. Si trovi la pulsazione di un moto armonico con fase nulla la cui velocità massima è vmax = 10
m/s e la cui posizione al tempo t = 0 s è s = 2 m
[ω = 5rad/s]
31. Un punto materiale si sta muovendo di moto armonico di pulsazione ω = 5 rad/s. Quale sarà la
sua posizione nell’istante in cui la sua accelerazione è a = 0, 4 m/s2 ?
[s=1,6 cm]
32. Un elastico di lunghezza a riposo l0 = 10 cm poggia su un tavolo ed è fissato ad una sua estremità
da un chiodo. All’altra estremità dell’elastico è fissata una massa m = 500 g. Se la massa sta
ruotando con una frequenza f = 50 Hz provocando un allungamento ∆l = 1, 5 cm si calcoli la
costante elastica della molla.
[k = 378, 3 kN/m]
33. Che velocità deve avere il supereroe Flash per riuscire a correre in orizzontale sulla parete verticale di un palazzo cilindrico con la base di raggio R = 30 m, supponendo che il suo peso sia
Francesco Saitta, Pordenone Febbraio 2017
44
CAPITOLO 1. MOTI E DINAMICA
P = 780 N, ed il coefficiente d’attrito tra le sue scarpe e la parete kA = 0, 8? Di quanto cambia
la velocità se la massa di Flash triplica?
[v = 69 km/h; la velocità non dipende dalla massa di Flash, perché...]
34. Una pallina si sta muovendo di moto rettilineo uniforme su un piano senza attrito ad una velocità
v0 = 20 km/h. Ad un certo punto entra in una zona in cui è presente sul pavimento un materiale
il cui coefficiente di attrito con la pallina è kA = 0, 5. Dopo quanto tempo e in quanto spazio la
pallina si fermerà?
[t=1,1 s; s=3,2 m]
35. Quale massa mB indicherà una bilancia nel “pesare” un uomo di massa m = 80 kg all’interno di
un aereo che sta accelerando verso l’alto con un’accelerazione a = 5 m/s2 ? A che peso in realtà
corrisponde?
[mB =76 kg; P =744 N]
36. Si trovi l’accelerazione del sistema in figura (36), considerando il piano senza attrito, il filo come inestensibile e la carrucola di dimensioni e massa trascurabili rispetto al fenomeno in studio.
Figura 1.31: .
[a=0,88 m/s2 , facendo scendere M2 ]
37. Si trovi l’accelerazione del sistema in figura (37), considerando il piano senza attrito, il filo come inestensibile e la carrucola di dimensioni e massa trascurabili rispetto al fenomeno in studio.
[a=0,69 m/s2 facendo scendere M1 ]
38. Si risolva il problema 4 nel caso in cui tra il piano e la massa M2 ci sia un coefficiente di attrito
kA = 0, 3.
Francesco Saitta, Pordenone Febbraio 2017
45
CAPITOLO 1. MOTI E DINAMICA
Figura 1.32: .
[a=0,025 m/s2 ]
39. Si risolva il problema 7 nel caso in cui tra il piano e la massa M2 ci sia un coefficiente di attrito
kA2 = 0, 2 e tra il piano e la massa M1 un coefficiente kA1 = 0, 8.
[a=0 m/s2 ]
40. Un ragazzo sta giocando a tirare un sasso di massa m = 50 g con una fionda. La fionda ha un
elastico di costante k = 10000 N/m allungabile fino a 10 cm rispetto alla sua lunghezza a riposo.
Supponendo che il ragazzo lanci il sasso da un’altezza h = 1, 2 m con un angolo α = π/6 rispetto
l’orizzontale, si calcoli la gittata massima del sasso.
[x=180 m]
41. Immaginiamo di approssimare il funzionamento di un tappeto elastico come il funzionamento di
una molla. In questa ipotesi, data la costante elastica del tappeto k = 20000 N/m, si calcoli a
che altezza minima da terra deve essere messo il tappeto affinché un persona di massa m = 80
kg raggiunga l’altezza h = 3 m sopra al tappeto stesso.
[h0 = 0, 5 m]
42. Un punto materiale di massa m si trova in cima ad un piano inclinato liscio alto h, alla base del
quale si trova un piano orizzontale scabro con coefficiente d’attrito tra piano e massa k. Si calcoli
il lavoro fatto dalla forza d’attrito nel piano orizzontale per fermare il punto materiale; si calcoli
inoltre lo spazio (percorso sul piano orizzontale) necessario per fermare il punto materiale. cc
[L= mgh; s=h/g]
43. Nella costruzione di una pista per biglie si vuol fare un giro della morte dopo la partenza da
ferma della biglia da una certa altezza h. Qual è il minimo valore di h per riuscire a far compiere
Francesco Saitta, Pordenone Febbraio 2017
46
CAPITOLO 1. MOTI E DINAMICA
il giro della morte alla biglia approssimando il giro della morte con una circonferenza di raggio R?
[hmin = 5R/2]
44. Una massa m = 10 kg che comprime una molla orizzontale (k = 100 N/m) di una quantità
∆x = 20 cm viene lasciata muoversi sotto l’effetto della forza elastica. Supponendo che il piano
su cui giacciono molla e massa sia caratterizzato da una costante d’attrito tra massa e piano
k = 0, 1 si calcoli il lavoro fatto dalla forza d’attrito per fermare la massa.
[L=2 J]
45. Una pallina di massa m = 500 g viene spinta in salita lungo un piano inclinato di un angolo
α = π/4 da una forza costante F~ di modulo F = 5 N. Se la velocità della pallina all’inizio del
piano è vi = 1 m/s e alla fine del piano vf = 3 m/s, quanto lavoro ha fatto la forza F~ ? Quanto
è lungo il piano inclinato? Quanto lontano dal piano inclinato cadrà la pallina se continua nel
suo moto?
[L=2 J; l=40 cm; d=1,14 m]
46. Data la figura (46) si calcolino le velocità o le altezze nei punti indicati del punto materiale di
massa m = 1 Kg.
Figura 1.33: .
[vB = 8, 9 m/s2 ; hC = 3, 7 m; vD = 7, 7 m/s; vE = 9, 9 m/s]
47. Una gru deve portare degli oggetti da terra ad un altezza h = 5 m. Che potenza deve sviluppare
il motore della gru per portare un carico massimo di 100 oggetti da 50 kg in due ore?
[P=34 W]
Francesco Saitta, Pordenone Febbraio 2017
47
CAPITOLO 1. MOTI E DINAMICA
48. La fabbrica costruttrice di una moto da corsa dichiara che il modello di punta può portare la
moto da ferma ai 100 km/h in 3 secondi. Supponendo una massa di 150 kg, quale potenza viene
consumata dalla moto in tale accelerazione?
[P= 19,3 kW]
49. Un ragazzino gioca su un altalena le cui catene sono lunghe l = 2, 5 m partendo da fermo formando un angolo α = 30◦ rispetto l’orizzontale. Se la massa del ragazzino è m = 60 kg, si calcoli
la tensione delle catene dell’altalena nel punto più basso della traiettoria.
[T=743 N]
50. A force F = 10 N is acting on a point particle of mass m = 10 kg, with initial speed vi = 0 m/s.
Find the work done by the force after ∆t = 10 s.
[500 J]
51. A point particle is standing on the floor. It is pushed by a force F = 10 N making an angle
α = π3 with respect to the ground. Find the work done by the force after a displacement of the
point particle along the floor s = 5 m.
[25 J]
52. A point particle (m = 5 kg) is moving with speed v = 50 m/s on a floor with friction coefficient
µ = 2. Find the work done by friction when the point particle stops.
[6250 J]
53. A point particle (m = 2 kg) is moving with speed v = 10 m/s. An external force does on the
point particle a work L = 100 J. Find the final velocity of the point particle.
[14 m/s]
54. Find the work that a force has to do to expand a spring, with k = 10 N/m, from the equilibrium
(l = 5 m) to l = 15 m.
[500 J]
55. Find the energy of the system made up by two identical point particles (m = 1 kg), one moving
on the ground (without friction) with speed v = 10 m/s, the other free falling down, knowing
that at some point the second point particle is at h = 2 m with v = 10 m/s.
[120 J]
56. A spring (k = 1000 N/m) in vertical position is compressed by an external force of ∆l = 0, 1 m;
a point particle (m = 1 kg) on the top of it is launched up by means of the elastic force. Find
the higher point reached by the point particle.
[0,5 m]
57. A point particle (m = 5 kg) free-falls from a height h = 10 m on the top of a spring (k = 1000
N/m). What speed does the point particle have before hitting the spring?
Francesco Saitta, Pordenone Febbraio 2017
48
CAPITOLO 1. MOTI E DINAMICA
[14 m/s]
58. A point particle of mass m = 1, 00 kg is launched by means of a spring (k = 500, 00 N/m) compressed of ∆l = 20, 00 cm and inclined by α = π3 with respect to the floor. Find the maximum
height reached by the point particle, and its kinetic energy at that point.
[0,81 m;2 J]
59. A block of mass m = 10 kg is pushed up on an inclined plane (α = π/4) with an initial velocity
v0 = 2 m/s. If the constant of friction between the block and the plane is k = 0, 5, what is the
speed of the block when it returns to its original position? What is the intensity of the work
done by the friction during this phenomenon?
[vf = 1, 2 m/s; LFA = 13, 2 J]
Francesco Saitta, Pordenone Febbraio 2017
49
CAPITOLO 2. RELATIVITÀ GALILEIANA
Capitolo
2
Relatività Galileiana
Abbiamo già discusso di come i tre principi della dinamica introducano due tipi di sistemi di riferimento e due tipi di forze: inerziali e non inerziali. In questo capitolo discuteremo come un fenomeno
possa essere descritto da un osservatore in quiete rispetto al fenomeno e da un osservatore in moto
uniforme rispetto al primo, evidenziando i legami tra le due descrizioni. Il primo scienziato a parlare
di come queste due descrizioni possano essere messe in relazione tra loro fu Galilei, da cui il nome
di relatività galileiana a questa parte di fisica, dove relatività indica proprio che la descrizione dei
fenomeni è relativa a sistemi di riferimento diversi tra loro. Introdurremo le leggi di composizione e le
trasformazioni di Galileo, assieme al principio di relatività galileiano, relazioni che furono alla base di
tutta la fisica fino alla fine del 1800, quando gli scienziati si accorsero che questa teoria non era valida
per la radiazione elettromagnetica (come vedremo nel quinto anno di corso). Albert Einstein (Ulm,
1879 - Princeton, 1955) propose delle soluzioni ai problemi creati dalla relatività classica con la teoria
della relatività, prima ristretta nel 1905 e poi generale nel 1916, che risultano essere un ampliamento
di ciò che andremo a studiare in questo capitolo. Uno dei problemi filosoficamente più importanti
per la teoria della relatività galileiana è quello della definizione del sistema di riferimento in quiete
assoluta: per affermare infatti se due sistemi sono inerziali tra loro dobbiamo ammettere che esista
un sistema di riferimento in quiete assoluta, ovvero secondo un qualsiasi osservatore, rispetto al quale
definire lo stato di moto di tutti i punti materiali dell’universo. Già Galilei tentò di risolvere questo
problema individuando il sistema assoluto con quello solidale alle stelle fisse, argomento che diventò
presto inconsistente grazie alle osservazioni celesti sempre più precise (non ci sono stelle fisse); Newton
invece, mosso dal suo sentimento religioso panteistico, disse che il sistema assoluto era quello solidale
con Dio. Entrambe queste proposte non ebbero grande seguito nella storia della fisica; gli scienziati del
diciottesimo e diciannovesimo secolo furono convinti dell’esistenza dell’etere: una sostanza impalpabile
ed invisibile sulla quale doveva propagarsi la luce e che doveva essere in quiete assoluta. Ogni tentativo
sperimentale di rilevare l’etere risultò però fallimentare, portò anzi alla formulazione delle teorie di relatività di Einstein, con cui come già detto si risolsero alcuni dei problemi posti già da Galilei e Newton.
Nella nostra descrizione immagineremo sempre un sistema di riferimento in quiete, ed uno in moto rettilineo uniforme rispetto al primo, come descritto in figura (2.1). Per quanto riguarda i prossimi
paragrafi utilizzeremo sempre la convenzione per cui le quantità senza pedice sono le quantità misurate dal sistema di riferimento considerato in quiete, le quantità con pedice r sono quelle misurate dal
sistema di riferimento in movimento e le quantità con pedice t sono riferite al sistema di riferimento in
movimento (la sua posizione, la sua velocità,...). Per rendere concrete le leggi dei seguenti paragrafi,
che valgono comunque in generale, immaginiamo una semplice situazione esemplificativa: consideriamo il passaggio di un treno in una stazione in cui il treno stesso non sosta, supponendo rettilineo
Francesco Saitta, Pordenone Febbraio 2017
51
CAPITOLO 2. RELATIVITÀ GALILEIANA
uniforme (~v = ~vt ) il moto del treno. Il sistema di riferimento in quiete è solidale alla stazione, possiamo
immaginare un personaggio A seduto su di una panchina che osserva il passaggio del treno, mentre
il sistema in movimento è solidale con il treno stesso, possiamo immaginare un altro personaggio B
seduto all’interno del treno.
Figura 2.1: Sistemi di riferimento inerziali
2.1
2.1.1
Spazio e tempo nella fisica classica
Il carattere assoluto di spazio e tempo: Galilei e Newton
Tutta la fisica classica si basa sui concetti primitivi di spazio e tempo assoluti. Nello sviluppo della
meccanica Galilei e Newton fecero esplicito riferimento a questi concetti e tutta la comunità scientifica,
fatta eccezione per alcuni casi che discuteremo nel prossimo paragrafo, guardava allo spazio ed al tempo
come a delle cornici all’interno delle quali descrivere i fenomeni naturali. Descrivere un fenomeno
utilizzando un sistema di riferimento faceva capo solamente alla convinzione che l’universo fosse scritto
in termini matematici (Galilei, 1623) e la descrizione con le coordinate fosse solamente il più semplice
stratagemma tecnico per farlo. Questa concezione fu uno dei pilastri filosofici su cui si basò tutta
la scienza classica: il suo superamento con le teorie di Einstein all’inizio del ventesimo secolo fu
sicuramente uno dei momenti più rivoluzionari della storia della fisica.
Il tempo è indipendente da ogni elemento esterno. Esso è pura durata, da non confondere con il
tempo umano, sensibile ed imperfetto, e neppure con il tempo meteorologico. “ Il tempo assoluto, vero,
Francesco Saitta, Pordenone Febbraio 2017
52
CAPITOLO 2. RELATIVITÀ GALILEIANA
matematico, in sé e per sua natura senza relazione con alcunché di esterno, scorre uniformemente,
e con altro nome è chiamato durata; quello relativo, apparente e volgare, è una misura (accurata o
approssimata) sensibile ed esterna della durata per mezzo del moto che comunemente viene impiegata
al posto del vero tempo; tali sono l’ora il giorno, il mese, l’anno.” (Newton, 1687).
Lo spazio non ha alcun rapporto con l’esterno. Lo spazio assoluto, uguale ed immobile è condizione
dello spazio, che nella sensazione di dà unicamente in relazione ai corpi. “Lo spazio assoluto, per sua
natura senza relazione ad alcunché di esterno, rimane sempre uguale ed immobile; lo spazio relativo è
una dimensione mobile o misura dello spazio assoluto, che i nostri sensi definiscono in relazione alla
sua posizione rispetto ai corpi, ed è comunemente preso come lo spazio immobile; cosı̀ la dimensione
di uno spazio sotterraneo o aereo o celeste viene determinata dalla sua posizione rispetto alla terra. Lo
spazio assoluto e lo spazio relativo sono identici per grandezza e specie, ma non sempre permangono
identici quanto al numero. Infatti se la Terra, per esempio, si muove, lo spazio della nostra aria, che
relativamente alla Terra rimane sempre identico, sarà ora una parte dello spazio assoluto attraverso
cui l’aria passa, ora un’altra parte di esso; e cosı̀ muterà assolutamente in perpetuo.” (Newton, 1687).
2.1.2
Il concetto di spazio secondo Berkeley e Mach
Nonostante il sostanziale accordo con la natura assoluta di spazio e tempo dei contemporanei di
Newton, ci furono delle voci che si dissociarono da questa idea i cui principali esponenti furono il
vescovo britannico George Berkeley (Kilkenny, 1685 - Oxford, 1753) ed il fisico e filosofo austriaco
Ernst Mach (Brno, 1838 - Haar, 1916).
Berkeley si oppose all’idea dello spazio assoluto in quanto esso non è osservabile. Egli sottolineò il
fatto che ogni moto esiste in quanto contestualizzato in un sistema di corpi e masse, senza i quali non
potrebbe nemmeno essere descritto. Alcuni anni dopo i principia di Newton egli scrisse:
“Se ogni luogo è relativo, anche ogni moto è relativo; e non si può comprendere il moto se non
se ne è determinata la direzione, che a sua volta non si può comprendere se non in relazione al nostro
o a qualche altro corpo. In su, in giù, a destra, a sinistra, tutte le direzioni e i luoghi si basano su
qualche riferimento ed è necessario presupporre un altro corpo distinto da quello in movimento... per
cui il moto è per sua natura relativo, né può essere compreso finché non si considerino i corpi in
relazione a cui esiste; più generalmente, non si può stabilire un riferimento, se mancano i termini
che in riferimento debbono esser posti. Perciò, se supponiamo che tutto si annulli eccetto un globo, è
impossibile immaginare un qualsiasi movimento di tale globo. Consideriamo ora che i globi siano due,
e che oltre ad essi non esista alcun’altra cosa materiale: il moto circolare di questi due globi intorno al
loro centro comune non può essere immaginato. Ma ammettiamo che venga improvvisamente creato
il cielo delle stelle fisse: saremo allora in condizione di immaginare il moto dei globi per mezzo della
loro posizione relativa alle varie parti del cielo.”(Berkeley, 1721)
Berkeley evidentemente si oppose alla concezione del moto assoluto e quindi della stessa esistenza
di un sistema di riferimento in quiete assoluta, e da diversi studiosi è considerato un precursore delle
teorie della relatività di inizio novecento sviluppate da Einstein.
Mach in tempi in cui l’autorità delle idee Newton era indiscussa, pari se non maggiore rispetto
all’autorità delle idee di Aristotele nel diciassettesimo secolo, riprese le idee del vescovo britannico
riaccendendo la discussione sulla natura dello spazio. Il punto di vista di Mach è molto simile a quello
di Berkeley:
Francesco Saitta, Pordenone Febbraio 2017
53
CAPITOLO 2. RELATIVITÀ GALILEIANA
“...Secondo me esistono solo moti relativi... Quando un corpo ruota rispetto alle stelle fisse, si producono forze centrifughe; quando ruota rispetto a qualche altro corpo e non in relazione alle stelle fisse,
non si producono forze centrifughe. Non ho nulla in contrario a chiamare rotazione la prima, purché
ci si ricordi che non vuol dire altro che rotazione rispetto alle stelle fisse.”
“Ovviamente non ha importanza se noi pensiamo che sia la Terra a ruotare intorno al suo asse,
o che essa sia ferma mentre le stelle fisse le girano intorno. Da un punto di vista geometrico, in tutti
e due i casi, si tratta di un moto relativo della Terra e delle stelle fisse l’una rispetto alle altre. Ma se
ammettiamo che la Terra sia ferma e che le stelle fisse le girino intorno, non c’è schiacciamento della
Terra..., almeno secondo la concezione che noi abbiamo della legge di inerzia. Ora possiamo superare
questa difficoltà in due modi: o ogni moto è assoluto, o la nostra legge di inerzia è formulata in modo
sbagliato. Io preferisco la seconda soluzione. La legge di inerzia deve essere concepita in modo da
portare allo stesso risultato sia nella prima che nella seconda ipotesi. È perciò evidente che nella sua
formulazione bisogna tener presenti le masse dell’Universo”(Mach, 1893)
Mach quindi riprende gli argomenti di Berkeley e come vedremo ispirerà Einstein nei suoi ragionamenti
che lo portarono alle formulazioni della teoria della relatività speciale prima e generale poi.
2.2
Legge di composizione delle posizioni e degli spostamenti
Ritorniamo ora alla situazione del treno e dei due osservatori A e B definita nell’introduzione a questo
capitolo: supponiamo di chiedere ad un certo istante di tempo ai due osservatori A e B quale sia
la posizione della punta del treno. Evidentemente per l’osservatore B, quello seduto all’interno del
treno, avrà una certa posizione ~st che non dipende dal tempo (la punta del treno sarà sempre un certo
numero di metri davanti a lui); per l’osservatore A invece la punta del treno si trova in un punto
diverso, ~s, ottenibile come la somma del vettore posizione del tizio B sommato alla posizione misurata
dal tizio B, come illustrato in figura (2.2). La formula generale che possiamo ottenere è dunque:
~s = ~sr + ~st ,
(2.2.1)
con ~s il vettore posizione misurato dall’osservatore fermo, ~st il vettore posizione dell’osservatore in
movimento rispetto all’osservatore fermo e ~sr il vettore posizione misurato dall’osservatore in movimento. Allo stesso modo possiamo pensare alla misura di un certo spostamento, ottenendo la seguente
formula:
~ = ∆s
~ r + ∆s
~ t
∆s
(2.2.2)
2.3
Legge di composizione delle velocità
Immaginiamo ora che un tizio C si muova con velocità costante all’interno del treno partendo da B
~ r /∆t data dal
ed andando verso la punta del treno. Il signor B misurerà una certa velocità ~vr = ∆s
rapporto tra lo spostamento effettuato dal signor C nel suo sistema di riferimento e l’intervallo di
~ r . Il signor A invece misurerà una velocità
tempo ∆t che il signor C ha impiegato a percorrere ∆s
maggiore, data dalla somma tra la velocità del treno e la velocità di C all’interno del treno. La
situazione è espressa dall’equazione:
~v = ~vr + ~vt
(2.3.1)
In questo ragionamento è fondamentale la convinzione classica che l’intervallo di tempo ∆t sia lo stesso
per l’osservatore A e l’osservatore B: nella fisica classica il tempo ha un carattere assoluto, scorre
Francesco Saitta, Pordenone Febbraio 2017
54
CAPITOLO 2. RELATIVITÀ GALILEIANA
Figura 2.2: Legge di composizione delle posizioni
nello stesso modo in qualsiasi sistema di riferimento. Per noi questo concetto è scontato, naturale,
non ci sembra possibile che il tempo scorra in modo diverso a seconda del sistema di riferimento in
cui ci troviamo; eppure vedremo che all’inizio del ventesimo secolo Albert Einstein dimostrò, ed in
modo convincente, che il tempo dipende dal sistema di riferimento in cui lo si misura! Ricordando
che stiamo trattando solo di moti rettilinei uniformi e che dunque la velocità media coincide con la
velocità istantanea, dal punto di vista matematico è semplice dimostrare l’equazione (2.3.1) a partire
dall’equazione (2.2.2):
~ = ∆s
~ r + ∆s
~ t
∆s
~
~ r
~ t
∆s
∆s
∆s
=
+
∆t
∆t
∆t
~v = ~vr + ~vt
2.4
Legge di composizione delle accelerazioni
A questo punto capiamo in modo molto semplice che se il signor C, invece che muoversi di moto
rettilineo uniforme si muovesse di moto rettilineo uniformemente accelerato, l’accelerazione misurata
dal signor A e dal signor B sarebbe la stessa, visto che il treno non sta accelerando. Da un punto di
vista matematico si può semplicemente dimostrare dividendo membro a membro l’equazione (2.3.1)
per l’intervallo di tempo ∆t e vedendo che il termine ~at sparisce in quanto l’accelerazione del treno è
nulla. Si ha quindi per le accelerazioni la seguente relazione:
~a = ~ar
(2.4.1)
Questa relazione è di estrema importanza da un punto di vista concettuale perchè dimostra come le
accelerazioni siano delle quantità invarianti nella relatività galileiana, quantità cioè che rimangono
sempre le stesse a prescindere dal sistema di riferimento in cui vengono misurate. Essendo invarianti
Francesco Saitta, Pordenone Febbraio 2017
55
CAPITOLO 2. RELATIVITÀ GALILEIANA
le accelerazioni e concependo in modo naturale, cosı̀ come per il tempo, la massa come grandezza
invariante, possiamo dire che anche le forze sono grandezze invarianti per la relatività galileiana: le
forze sono dunque grandezze che non dipendono dal sistema di riferimento in cui sono misurate purché
i sistemi in questione siano inerziali. Ecco il motivo concettuale per cui abbiamo sempre detto che
i principi della dinamica valgono solamente in sistemi di riferimento inerziali tra loro, e che se ci
troviamo in sistemi accelerati compaiono le cosiddette forze apparenti.
2.5
Trasformazioni di Galileo
Storicamente la relazione descritta dall’equazione (2.2.2) viene scritta in termini di trasformazione
matematica, dove le coordinate con apice sono secondo il nostro schema di lavoro le coordinate misurate
dal sistema di riferimento in movimento, mentre le coordinate senza apice quelle misurate dal sistema
di riferimento in quiete. Il vettore ~v = (vx ; vy ; vz ) è il vettore che precedentemente avevamo chiamato
~vt , la velocità con cui si muove il sistema di riferimento in moto. Le seguenti equazioni sono chiamate
trasformazioni di Galileo:
0
x = x − vx t
0
y = y − vy t
(2.5.1)
z 0 = z − vz t
0
t = t
È interessante notare come dal punto di vista matematico le equazioni (2.5.1) siano semplicemente le
~ = ~v t. L’ultima equazione spesso non è riportata, esprime la
equazioni di una traslazione di vettore A
convinzione comune che il tempo sia invariante per la relatività galileiana (si usa anche dire invariante
per trasformazioni di Galileo); la riportiamo qui perché come detto precedentemente è uno dei paletti
della fisica classica che verrà abbattuto all’inizio del novecento dalle teorie di Einstein.
2.5.1
Invarianza delle lunghezze
Abbiamo già discusso dell’invarianza di massa, tempo, accelerazione e forze per trasformazioni di
Galileo, vogliamo qui dimostrare che anche le lunghezze lo sono: sembrerebbe infatti decisamente
strano che un certo righello lungo ad esempio 10 centimetri in un sistema di riferimento in quiete
possa diventare lungo 8 o 12 centrimetri in un sistema di riferimento in moto!!! Anche questa è una
certezza che lasceremo solamente in quinta studiando la relatività di Einstein, per il momento la
fisica classica ci assicura anche questa invarianza, come vedremo in queste righe con qualche semplice
passaggio matematico. Supponiamo, nell’esempio del treno di prima, di voler misurare la lunghezza di
un righello all’interno del treno. Il tizio B all’interno del treno semplicemente opererà la misura nel suo
sistema di riferimento, ottenendo L0 = x02 −x01 , dove x02 è la posizione misurata di un estremo del righello
nel sistema di riferimento in moto, x01 è la posizione dell’altro estremo sempre nel sistema di riferimento
in moto. Il tizio fermo in stazione misurerà invece una lunghezza L = x2 − x1 , con x2 ed x1 le posizioni
degli estremi del righello misurate nel sistema di riferimento in quiete. Applicando le trasformazioni
di Galileo possiamo vedere con facilità che L0 = x02 − x01 = (x2 − vx t) − (x1 − vx t) = x2 − x1 = L,
cioè la lunghezza del righello è una grandezza invariante per trasformazioni di Galileo, come volevamo
dimostrare e come il nostro intuito ci suggerisce.
2.6
Principio di relatività galileiano
Galilei arriva ad intuire il principio di relatività meccanica, ovvero il fatto che ogni fenomeno meccanico viene descritto nel medesimo modo in sistemi di riferimento inerziali; riportiamo qui
Francesco Saitta, Pordenone Febbraio 2017
56
CAPITOLO 2. RELATIVITÀ GALILEIANA
uno dei passi più famosi delle opere del fisico pisano in cui mette in evidenza il principio appena esposto:
Rinserratevi con qualche amico nella maggiore stanza che sia sotto coverta di alcun gran navilio,
e quivi fate d’aver mosche, farfalle e simili animaletti volanti; siavi anco un gran vaso d’acqua, e
dentrovi de’ pescetti; sospendasi anco in alto qualche secchiello, che a goccia a goccia vada versando
dell’acqua in un altro vaso di angusta bocca, che sia posto a basso: e stando ferma la nave, osservate
diligentemente come quelli animaletti volanti con pari velocità vanno verso tutte le parti della stanza;
i pesci si vedranno andar notando indifferentemente per tutti i versi; le stille cadenti entreranno tutte
nel vaso sottoposto; e voi, gettando all’amico alcuna cosa non più gagliardamente la dovrete gettare
verso quella parte che verso questa, quando le lontananze siano eguali; e saltando voi, come si dice, a
pié giunti, eguali spazii passerete verso tutte le parti. Osservate che avrete diligentemente tutte queste
cose, benché niun dubbio ci sia che mentre il vassello sta fermo non debbano succeder cosı̀, fate muover
la nave con quanta si voglia velocità; ché (pur che il moto sia uniforme e non fluttuante in qua e in là)
voi non riconoscerete una minima mutazione in tutti li nominati effetti, né da alcuno di quelli potrete
comprender se la nave cammina o pure sta ferma: voi saltando passerete nel tavolato i medesimi spazii
che prima, né, perché la nave si muova velocissimamente, farete maggior salti verso la poppa che verso
la prua, benché, nel tempo che voi state in aria, il tavolato sottopostovi scorra verso la parte contraria
al vostro salto; e gettando alcuna cosa al compagno, non con più forza bisognerà tirarla, per arrivarlo,
se egli sarà verso la prua e voi verso poppa, che se voi fuste situati per l’opposito; le gocciole cadranno
come prima nel vaso inferiore, senza caderne pur una verso poppa, benché, mentre la gocciola è per
aria, la nave scorra molti palmi (Galilei, 1632)
È evidente come quindi secondo questo principio di relatività ogni legge della meccanica abbia sempre
la stessa forma in sistemi di riferimento inerziali, e come quindi non sia possibile determinare, con
esperimenti meccanici, se il sistema inerziale in cui mi trovo sia in stato di quiete o di moto rettilineo uniforme: questi sistemi sono tutti equivalenti tra loro. Questo punto è molto importante in
quanto spiega come mai, come studieremo nel corso dell’ultimo anno, per cercare di trovare l’etere (il
sistema di riferimento in quiete assoluta) si fecero esperimenti di elettromagnetismo e non esperimenti
meccanici.
Francesco Saitta, Pordenone Febbraio 2017
57
CAPITOLO 2. RELATIVITÀ GALILEIANA
2.7
Esercizi
1. Un sistema di riferimento S1 è spostato rispetto al sistema di riferimento S di un vettore
d~ = (2; 3). Quale sarà la posizione per un osservatore solidale con S di un punto materiale
che per un osservatore solidale con S1 ha coordinate P1 = (3; 1)?
[P1 = (5; 4)]
~
2. Un sistema di riferimento S1 è spostato rispetto al sistema di riferimento S di un vettore d).
~
Quale sarà d se per un osservatore solidale con S la posizione di un punto materiale è P = (1; 1),
mentre per un osservatore solidale con S1 è P1 = (−5; 4)?
[d~ = (6; −3)]
3. Un sistema di riferimento S1 è spostato rispetto al sistema di riferimento S di un vettore ~v )
di modulo d = 5 ed angolo formato con l’asse delle ascisse di S α = π/6 rad. Quale sarà la
posizione di un punto materiale P , secondo un osservatore solidale con il sistema S, se per un
osservatore solidale con il sistema S1 il punto materiale ha coordinate P1 = (10, 5; 7, 3)?
[P = (14, 85; 9, 8)]
4. Un uomo A sta camminando alla velocità vA = 1 m/s sopra ad un treno, che passa alla velocità
vT = 120 km/h davanti ad una stazione, nella stessa direzione della velocità del treno. Un tizio
seduto sulla panchina della stazione che velocità misurerà per l’uomo A?
[v =123,6 km/h]
5. Rispetto al problema (4) che velocità calcolerebbe l’uomo seduto sulla panchina se il tizio A si
muovesse in direzione opposta alla velocità del treno?
[v =116,4 km/h]
6. Rispetto al problema (4) che velocità calcolerebbe l’uomo seduto sulla panchina se il tizio A si
muovesse in direzione perpendicolare alla velocità del treno?
[v =120,05 km/h]
7. Un ragazzo sta correndo in bicicletta alla velocità v = 20 km/h quando lascia cadere per sbaglio
il telefono cellulare da un’altezza h = 1, 2 m. Trascurando l’attrito dell’aria che moto descriverà
per il telefono un tizio seduto su una panchina che osserva la situazione? Che velocità del telefono misurerebbe un osservatore solidale con il tizio seduto sulla panchina un istante prima che
il telefono tocchi terra?
[v = 7, 4 m/s]
8. Se nel problema (7) il ragazzo in bicicletta stesse facendo un moto uniformemente accelerato con
una certa accelerazione a ed il telefono cadesse nell’istante in cui la bicicletta ha una velocità
v0 = 20 km/h, come cambierebbe il risultato?
[v = 7, 4 m/s]
Francesco Saitta, Pordenone Febbraio 2017
58
CAPITOLO 2. RELATIVITÀ GALILEIANA
9. Che moto deve fare un carrello a cui è appeso un pendolo affinché il pendolo sia in equilibrio
formando un angolo α = π/6 rispetto l’orizzontale?
[moto rettilineo uniformemente accelerato, a = 17 m/s2 ]
10. Un calciatore sta correndo incontro alla palla ad una velocità vG = 7 m/s; la direzione della corsa
del giocatore forma un angolo α = 135◦ con la direzione della palla, che si muove rasoterra. A che
velocità è stata lanciata la palla se il giocatore la vede avvicinarsi ad una velocità vP = 90 km/h?
[v = 19, 5 m/s]
11. Un ragazzino all’interno di un treno gioca a lanciare in verticale una pallina. Supponendo che
un osservatore solidale con il treno veda un moto di caduta di grave con velocità iniziale v0 = 6
m/s e che un osservatore solidale con la banchina della stazione in cui sta passando il treno senza
fermarsi misuri un moto parabolico con velocità iniziale v = 50 m/s qual è la velocità del treno?
[vT = 178 km/h]
12. In una giornata di pioggia un osservatore A fermo sul ciglio della strada osserva le gocce cadere
in verticale; se un osservatore all’interno di un’automobile che viaggia ad una velocità vA = 90
km/h vede la pioggia lasciare una traccia sul finestrino laterale con un angolo α = π/6 rispetto
alla verticale qual è la velocità della pioggia vA che osserva A? Quale la velocità vB misurata
dall’osservatore sull’auto? Si trascurino gli attriti delle gocce sul finestrino.
[vA = 43 m/s; vB = 50 m/s]
13. All’interno di un aereo per la simulazione di assenza di gravità, nella sua fase di caduta libera un
astronauta lancia una palla in orizzontale con velocità v0 = 5 m/s. Dopo quanto tempo toccherà
il pavimento dell’aereo? Che velocità della palla misura un osservatore solidale con la terra dopo
3 secondi dal lancio?
[mai (per lo meno finché l’aereo resta in caduta libera); v = 29, 8 m/s]
14. Si calcoli la velocità tangenziale della luna secondo un osservatore T solidale con la terra ed un
osservatore S solidale con il sole nel momento in cui si ha l’allineamento Sole-Terra-Luna.
[vT = 948 m/s; vS = 30796 m/s]
15. Si risolva il problema (14) nel caso in cui l’allineamento sia del tipo Sole-Luna-Terra. rivoluzione
terrestre.
[vT = 948 m/s; vS = 28900 m/s]
16. Un operatore televisivo deve filmare la scena di un film in cui il protagonista corre ad una velocità v = 5 m/s (!). L’attore protagonista non è evidentemente in grado di correre a quella
velocità, ma solamente ad una velocità massima vmax = 1, 5 m/s. Come può l’operatore realizzare comunque la sua ripresa? Si spieghi il ragionamento fatto.
[facendo muovere la telecamera incontro all’attore ad una velocità di 3,5 m/s]
Francesco Saitta, Pordenone Febbraio 2017
59
CAPITOLO 2. RELATIVITÀ GALILEIANA
17. Due ragazzi, A e B stanno giocando a passarsi un pallone dentro ad una barca che si sta muovendo ad una velocità v = 3 m/s. Essi distano tra loro d = 2 m, lanciano la palla e la ricevono
entrambi ad una altezza h = 1, 2 m, con un angolo di lancio e di ricezione α = π/3 A quale
velocità deve lanciare ognuno di loro (vA per A e vB per B) affinché il gioco riesca? Secondo
l’osservatore a terra i due ragazzi lanciano la palla con la stessa velocità? Che velocità misura
0 ) e per il lancio di B (v 0 )? Si supponga che
un osservatore fermo a riva per il lancio di A (vA
B
l’osservatore veda A lanciare nella direzione del moto della barca e B in direzione opposta.
0 = 6, 8 m/s; v 0 = 4, 2 m/s]
[vA = 4, 8 m/s; vB = 4, 8 m/s; vA
B
18. Un’automobile A si muove con una velocità vA = 25m/s in direzione N30◦ E, mentre un’automobile B si muove con velocità vB = 30 m/s in direzione E60◦ S. Si calcoli il modulo della velocità
relativa tra le due automobili.
[vr = 48 m/s]
19. Durante una partita di calcio il portiere effettua una rimessa dal fondo imprimendo alla palla
una velocità iniziale v0 = 20 m/s formante un angolo α = 30◦ rispetto al suolo. Se un giocatore
che sta correndo parallelamente alla palla verso centrocampo misura una velocità della palla
v = 12 m/s a che velocità vG sta correndo il giocatore?
[vG = 10, 6 m/s]
20. Un oggetto viene fatto cadere dalla finestra di un palazzo con velocità iniziale v0 = 6, 5 m/s
diretta verso il basso in verticale da un’altezza h = 15 m. Un tizio A sta salendo con un ascensore a velocità costante v = 1 m/s nel palazzo; ad un’altezza h = 10 m dal suolo vede passare
l’oggetto di fronte a sé: quale velocità misurerà A per l’oggetto in questione?
[v = 12, 8 m/s]
21. Da un carrello che si sta muovendo con velocità costante vC = 50 km/h viene lanciata una
palla con una velocità iniziale v0 = 3 m/s in direzione orizzontale opposta al senso di marcia del
carrello ed altezza iniziale h = 1, 5 m. Quale sarà la gittata Gt del lancio secondo un osservatore
solidale con il terreno e quale la gittata Gc secondo il lanciatore?
[Gt = 6, 0 m; Gc = 1, 6 m]
22. A quale velocità deve correre una persona per mantenere un pallone di massa m = 200 g in
equilibrio in verticale sul petto se il coefficiente di attrito tra la palla e la maglia è k = 3?
[Non importa la velocità, il moto deve essere accelerato con a = 3, 3 m/s2 ]
23. Quale deve essere la velocità vB di una barca che vuole muoversi in direzione Est-Ovest ad una
velocità v = 100 km/h se la corrente su cui si sta muovendo è caratterizzata da una velocità
vC = 40 m/s in direzione Nord-Sud?
[vB = 48, 8 m/s in direzione N(0,6rad)O]
24. Un aereo si sta muovendo ad una velocità v = 500 km/h parallela al suolo quando entra in una
zona con una corrente ascensionale di velocità vC = 100 km/h. Quale sarà la velocità dell’aereo
rispetto al suolo all’interno della corrente?
Francesco Saitta, Pordenone Febbraio 2017
60
CAPITOLO 2. RELATIVITÀ GALILEIANA
[v = 510 km/h con un angolo α = 11◦ rispetto l’orizzontale]
25. Si consideri un moto parabolico caratterizzato da una velocità iniziale v0 = 20 m/s che forma un angolo α = 45◦ rispetto l’orizzontale. A quale velocità si deve muovere un osservatore
A, rispetto al sistema in cui avviene il moto parabolico, per osservare un moto di caduta di grave?
[vA = 14 m/s nella stessa direzione della velocità orizzontale iniziale del moto parabolico]
26. Find the relative speed of two point particles A and B with velocities ~vA = 2x̂ + 3ŷ (m/s) and
~vB = −2x̂ + 5ŷ (m/s) in a given reference frame Oxy .
[vr = 4, 5 m/s]
27. In a given reference frame Oxy a point particle A is moving with a velocity ~vA = 4x̂ − 3ŷ (m/s).
The relative velocity of a point particle B with respect to A is ~vr = 2x̂ + 2ŷ (m/s). Find vB .
[~vB = 6x̂ − 1ŷ (m/s)]
28. Find the speed of an airplane if the velocity measured from the earth is v = 300 km/h with an
angle α = 30◦ with respect to the horizontal and the airplane is flying in an area characterized
by a vertical wind with vW = 80 km/h.
[vA = 269 km/h]
29. A runner A is training and moves with a speed vA = 3 m/s when another runner, B, passes him:
in 10 seconds B moves from 5 m before A up to 3 m after A. What is the velocity of B with
respect to another guy C sitting on a bench and looking to the scene?
[vB = 3, 8 m/s]
30. A guy A is moving with a speed vA = 2 m/s inside a train A (vT A = 70 km/h) in the same
direction of the train A. A guy B is moving with a speed vB = 3 m/s inside another train B
(vT B = 50 km/h) in the opposite direction of the train B. What is the speed of the guy B
measured by the guy A if the two trains are moving one towards the other?
[v = 32, 2 m/s]
Francesco Saitta, Pordenone Febbraio 2017
61
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
Capitolo
3
Quantità di moto ed urti
In questo capitolo introdurremo una nuova grandezza fisica: la quantità di moto di un punto
materiale; attraverso questa grandezza arriveremo ad una formulazione più generale, rispetto a quella
vista nel capitolo 1, delle leggi della dinamica. Tale formulazione ci permetterà una più semplice
descrizione di fenomeni complessi quali sistemi a massa variabile, forze impulsive (che agiscono in
un intervallo di tempo molto breve) o urti tra punti materiali. La necessità dell’introduzione di una
grandezza simile Risulta evidente dalla difficoltà di descrivere dal punto di vista Newtoniano molte
situazioni concrete, come ad esempio:
• La salita di una mongolfiera inizialmente in equilibrio ad una certa altezza per effetto del rilascio
di una certa quantità di zavorra.
• Il rimbalzo di una palla contro un muro o la battuta di una pallina durante una partita di tennis.
• L’efficacia di un colpo secco di martello rispetto all’applicazione costante di una certa forza per
infilare un chiodo in un pezzo di legno.
A tal fine definiamo la seguente grandezza vettoriale:
~q = m~v ,
(3.0.1)
che chiamiamo quantità di moto e che misureremo nel sistema internazionale in kg·m/s o N·s.
3.1
Teorema dell’impulso
Il teorema dell’impulso dice che l’impulso di una forza, ovvero il prodotto tra la forza media F~m
applicata su un punto materiale in un intervallo di tempo ∆t, è uguale alla variazione della quantità
di moto del punto materiale stesso in quell’intervallo di tempo. Ovvero:
~
F~m ∆t = ∆q
(3.1.1)
Per darci ragione del teorema immaginiamo una forza variabile che agisca su un punto materiale per
un certo intervallo di tempo: ad esempio possiamo visualizzare un colpo di un tennista sulla pallina
da tennis. La forza agente sul punto materiale avrà in generale un andamento temporale del tipo
illustrato in figura (3.1), concentrata nell’istante t0 ma diversa da zero lungo tutto l’intervallo ∆t.
Possiamo quindi operare con il secondo principio della dinamica nel seguente modo:
Francesco Saitta, Pordenone Febbraio 2017
63
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
Figura 3.1: Forza agente sul punto materiale in ∆t
F~m = m~am
~
∆v
F~m = m
∆t
v
~f − ~vi
F~m = m
∆t
m
v
~
vi
f − m~
F~m =
∆t
~
∆q
F~m =
∆t
da cui si ottiene facilmente il teorema (3.1.1). Se volessimo considerare un intervallo di tempo infinitamente piccolo (o quantomeno molto piccolo rispetto al fenomeno che stiamo considerando) otterremmo,
con la solita convenzione introdotta nel primo capitolo, la relazione:
d~q
F~ = ,
dt
(3.1.2)
in cui questa volta arriviamo a definire la forza istantanea come il rapporto tra la variazione della
quantità di moto e l’intervallo di tempo infinitesimo in cui la variazione stessa è avvenuta. Come
per il secondo principio della dinamica questo teorema parla di cause ed effetti: la relazione tra la
causa forza ed il suo effetto variazione della quantità di moto. Riapplicando il ragionamento fatto per
il lavoro e descritto nella figura (1.14) possiamo dire che la variazione di quantità di moto totale in
figura (3.1) è data dall’area tra la curva F (t) e l’asse dei tempi1 .
3.2
Teorema di conservazione della quantità di moto
Dal teorema dell’impulso è facile dedurre che se la somma tutte le forze agenti su un punto materiale è
nulla allora sarà nulla la variazione di quantità di moto del punto materiale stesso, ovvero la quantità
1
in questo testo sottolineiamo continuamente le relazioni geometriche tra quantità fisiche ed aree o curve tangenti.
Questo affinché, una volta che nel corso di matematica si affronteranno i concetti di derivata ed integrale definito, si
possano cogliere le diverse applicazioni ad argomenti già svolti di fisica
Francesco Saitta, Pordenone Febbraio 2017
64
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
di moto è costante. In sistemi isolati la quantità di moto si conserva è l’usuale enunciato di questo
teorema, che matematicamente si esprime come:
F~ = ~0 ⇐⇒ ~q = ~k
(3.2.1)
Naturalmente considerando un sistema formato da un insieme di punti materiali possiamo considerare
come quantità di moto totale del sistema la somma delle singole quantità di moto dei diversi punti
materiali ed applicare il teorema ad un qualsiasi sistema di punti materiali. Come ogni teorema
di conservazione in fisica la conservazione della quantità di moto è importante dal punto di vista
concettuale per due motivi: in primo luogo è una caratterizzazione dei sistemi fisici ed in secondo
luogo ci aiuta a risolvere problemi in sistemi isolati. Al momento quindi possiamo dire con certezza
che:
• In un sistema chiuso si conserva la massa;
• In un sistema conservativo si conserva l’energia meccanica;
• In un sistema isolato si conserva la quantità di moto.
Più quantità che si conservano vengono trovate più si può conoscere nel dettaglio fisico il sistema
stesso, potendolo descrivere e potendo predire la sua evoluzione sulla base delle informazioni date
dalle quantità conservate.
3.3
Descartes e Leibniz: dibattito sui principi di conservazione
Nei secoli dello sviluppo della fisica classica ebbero grande risalto due scienziati, Renè Descartes (La
Haye en Touraine, 1596 - Stoccarda, 1650) e Gottfried Wilhelm Leibniz (Lipsia, 1646 - Hannover,
1716). In questo paragrafo approfondiremo le idee di questi due scienziati rispetto alla quantità di
moto; è interessante vedere come queste due grandi menti della scienza ebbero idee molto diverse tra
loro anche per renderci conto di come, nella storia della fisica, le conclusioni che oggi studiamo in pochi
giorni sono in realtà frutto di processi molto lunghi e complessi. Ci soffermeremo soprattutto sul concetto di conservazione di quantità di moto visto dal punto di vista dei due scienziati, ed in particolare
studieremo il ragionamento che portò Leibniz a scrivere un saggio comparso sugli Acta Eruditorum
del 1686 (Leibniz, 1863) intitolato Brevis denmostratio erroris memorabilis Cartesii et aliorum circa
legem naturalem (Breve dimostrazione di un errore memorabile di Cartesio e di altri riguardo una
legge naturale). Sia Descartes che Leibniz colsero l’importanza di trovare qualche grandezza fisica che
risultasse invariante, cioè che rimanesse immutata qualunque fenomeno fisico possa avvenire nell’universo: da un punto di vista filosofico questa ricerca è giustificata dalla convinzione che l’universo
debba avere delle regole scientifiche all’interno delle quali tutto possa avvenire e della ricerca di ciò
che genera il moto dei corpi, dal punto di vista pratico le quantità invarianti (come abbiamo visto nel
caso dell’energia) ci permettono di catalogare sistemi a seconda del valore che assume l’invariante e di
risolvere problemi in modo semplice.
• Il punto di vista di Descartes:
Descartes e gli studiosi a lui vicini (i cartesiani) pensavano che la quantità di moto fosse un
”invariante universale”: essi identificano il prodotto tra massa e velocità di una particella con la
forza motrice, ciò che permette il moto nell’universo. Ecco qui di seguito il pensiero di Descartes
in proposito (Descartes, 1644):
“Dopo aver esaminato la natura del movimento bisogna che ne consideriamo la causa, e poiché
Francesco Saitta, Pordenone Febbraio 2017
65
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
essa può essere presa in due maniere, cominceremo dalla prima e più universale, che produce
generalmente tutti i movimenti che sono al mondo; considereremo in appresso l’altra la quale fa
sı̀ che ogni parte della materia acquisti movimenti che non aveva prima. Per quanto riguarda
la prima mi sembra evidente che non ce n’è altra che Dio, che per sua onnipotenza ha creato
la materia con il movimento e il riposo, e che conserva adesso nell’universo, col suo concorso
ordinario, tanto movimento o riposo quanto ce n’ha messo creandolo.Poiché sebbene il movimento non sia che un modo nella materia che è mossa, essa ne ha pertanto una
certa quantità che non aumenta e non diminuisce mai, benché ce ne sia ora più e
ora meno in alcune delle sue parti. Ecco perché quando una parte della materia si
muove due volte più presto di un’altra, e questa è due volte maggiore della prima
noi dobbiamo pensare che c’è tanto movimento nella più piccola che nella maggiore,
e che tutte quante le volte il movimento di una parte diminuisce, quello di qualche altra parte aumenta in proporzione. Noi conosciamo anche che è una perfezione in
Dio non solamente di essere immutabile nella sua natura, ma anche di agire in un modo che
non cambia mai, tanto che, oltre i cambiamenti che vediamo nel mondo e quelli cui crediamo
perché Dio li ha rivelati, e che sappiamo accadere o essere accaduti nella natura senza alcun
cambiamento da parte del Creatore, non ne dobbiamo supporre altri nelle sue opere per paura
di attribuirgli incostanza. Da cui segue che poiché egli ha mosso in molte maniere differenti le
parti della materia, quando le ha create, e le mantiene tutte nella stessa maniera e con le stesse
leggi ch’egli ha potuto osservare loro nella creazione, conserva incessantemente in questa
materia un’uguale quantità di movimento.”
Alla luce delle nostre conoscenze notiamo come la conservazione della quantità di moto secondo
Descartes non fosse un concetto completamente errato, l’errore fatto dal grande scienziato fu
quello di assolutizzare questa conservazione: sappiamo infatti al giorno d’oggi - e ne abbiamo
visto la dimostrazione in classe - come la quantità di moto si conservi, ma solamente in sistemi
isolati.
• Il punto di vista di Leibniz:
Leibniz comprese come nel ragionamento di Descartes ci fossero degli errori dal punto di vista
fisico-matematico. Egli dimostrò come nell’universo la quantità che si conserva sempre sia un’altra quantità: mv 2 ( che assimilò ad mh). Seppur in modo non analitico, considerando solamente
un esempio meccanico, possiamo trovare nelle righe di Leibniz l’idea moderna di conservazione
dell’energia. Qui di seguito il brano tratto dagli scritti di Leibnitz (Leibniz, 1863):
“Poiché molti matematici vedono nelle cinque macchine semplici che la velocità e la mole (massa) sono tra loro compensate, generalmente essi valutano la forza motrice tramite la quantità
di moto, ossia tramite il prodotto della moltiplicazione del corpo per la sua velocità. Oppure,
per parlare più geometricamente, essi affermano che le forze di due corpi (della stessa specie)
che si urtano nel movimento e che agiscono parimente mediante la loro massa e il movimento
sono in ragione composta dei corpi, o delle masse, e delle velocità che hanno. E cosı̀ poiché è
conforme alla ragione che la stessa somma della potenza motrice è conservata in natura, e non è
diminuita, in quanto vediamo che non è persa alcuna forza da un corpo che non sia trasferita in
un altro; né aumentata perché ancora il moto perpetuo meccanico non avviene mai, per il fatto
che nessuna macchina e di conseguenza neanche il mondo intero può aumentare la sua forza
senza un nuovo impulso esterno; da qui Cartesio, che considerava equivalente la forza motrice
e la quantità di moto, ha affermato che la stessa quantità di moto è conservata da Dio nell’universo. Io, certamente, per mostrare quanto si trovi tra queste due, suppongo anzitutto che
Francesco Saitta, Pordenone Febbraio 2017
66
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
un corpo, cadendo da una certa altezza, acquista una forza fino a rialzarsi di nuovo, se la sua
direzione cosı̀ lo conduce né qualcosa d’esterno l’impedisce: per esempio un pendolo ritornerà
precisamente all’altezza da cui è caduto, a meno che la resistenza dell’aria e altri impedimenti
simili molto piccoli non assorbano un po’ della sua forza, dai quali noi ora facciamo astrazione.
Suppongo anche, in secondo luogo, che è necessaria una forza tanto grande per sollevare il corpo
A di una libbra fino all’altezza CD di quattro braccia di quella che è necessaria per sollevare
il corpo B di quattro libbre fino all’altezza EF di un braccio. Tutte queste cose sono ammesse
ugualmente dai cartesiani e dagli altri filosofi e matematici dei nostri tempi. Segue da qui che il
corpo A lasciato cadere dall’altezza CD ha acquisito precisamente altrettanta forza del corpo B
lasciato cadere dall’altezza EF. Infatti, il corpo A dopo esser stato lanciato da C arriva in D,e là
esso possiede la forza di risollevarsi fino a C, per la prima ipotesi, ossia la forza di sollevare un
corpo di una libbra (vale a dire il proprio corpo) fino all’altezza di quattro braccia. E parimenti
dopo che il corpo B è pervenuto per la caduta da E in F, dove esso ha la forza di risalire fino
ad E, per la prima ipotesi, ossia la forza di sollevare un corpo di quattro libbre (vale a dire il
proprio corpo) fino all’altezza di un braccio. Pertanto, per la seconda ipotesi, la forza del corpo
A che si trova in D e la forza del corpo B che si trova in E sono uguali. Vediamo ora se la
quantità di moto è la stessa in entrambi i casi. In verità, il più grande disaccordo sarà trovato lı̀
contro ogni speranza. Il che io mostro nel modo seguente. È stato dimostrato da Galileo che la
velocità acquisita mediante la caduta CD è il doppio della velocità acquisita mediante la caduta
EF. Moltiplichiamo quindi il corpo A che è come 1 per la sua velocità che è come 2, il prodotto
o quantità di moto sarà come 2; moltiplichiamo di nuovo il corpo B che è come 4 per la sua
velocità che è come 1, il prodotto o quantità di moto sarà come 4.Pertanto la quantità di
moto che è del corpo A che si trova in D è la metà della quantità di moto che è del
corpo B che si trova in F, e tuttavia poco prima le forze sono state trovate uguali.
E pertanto esiste una grande differenza tra la forza motrice e la quantità di moto,
di tal sorta che l’una non potrebbe essere calcolata tramite l’altra, come abbiamo
inteso dimostrare. Risulta da ciò come la forza dovrebbe essere misurata dalla quantità dell’effetto che può produrre, per esempio dall’altezza a cui precisamente può sollevare un corpo
di grandezza e specie date, non di certo dalla velocità che può imprimere a un corpo. Infatti,
non è necessaria una forza doppia, ma una più grande per dare al corpo una velocità doppia.
Nessuno sicuramente si meraviglierà che nelle macchine semplici, la leva, l’asse della ruota, la
puleggia, il cuneo, la vite d’Archimede, e simili, c’è equilibrio quando la grandezza di un corpo è
compensata dalla velocità dell’altro che nascerà secondo la disposizione della macchina; o quando le grandezze (essendo data la stessa specie di corpi) stanno reciprocamente come le velocità;
o quando la stessa quantità di moto si produrrà dall’uno o dall’altro. Infatti deriva ancora da
qui che la quantità dell’effetto dovrebbe essere la stessa in entrambi i casi, ovvero l’altezza di
discesa o di salita in un qualunque lato dell’equilibrio che tu desideri che il moto sia fatto. È
quindi accidentale che la forza possa essere misurata dalla quantità di moto. Di sicuro si danno
altri casi, tale è quello che abbiamo riportato qui dove esse non coincidono. D’altronde poiché
nulla è più semplice della nostra dimostrazione, è sorprendente che non sia venuta in mente a
Cartesio o ai cartesiani, uomini molto dotti. Ma di sicuro la troppa confidenza nel suo spirito
l’ha deviato dal cammino. Infatti Descartes, per il difetto comune ai grandi uomini fu reso alla
fine un po’ troppo importante. D’altra parte, temo che non pochi cartesiani comincino a imitare
i peripatetici di cui si burlano, ed è perché hanno l’abitudine di consultare i libri del maestro
anziché la retta ragione e la natura delle cose. Si deve dunque dire che le forze sono in
ragione composta dei corpi (della gravità stessa o della solidità) e delle altezze che
producono la velocità, vale a dire di quelle mediante le quali tali velocità potrebbero
essere acquisite cadendo, o più generalmente (poiché talvolta nessuna velocità è staFrancesco Saitta, Pordenone Febbraio 2017
67
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
ta ancora prodotta) delle altezze sul punto di produrre: non in verità generalmente
delle velocità stesse, di qualche maniera che ciò sia plausibile in prima approssimazione e
sia constatato dalla maggior parte, e da qui nacquero molti errori che sono tangibili negli scritti
matematico-meccanici dei reverendi padri Honoré Fabri e Claude Dechales e anche in Giovanni
Alfonso Borelli e in altri, per il resto eminenti in questi studi. E penso anche che dipenda da ciò
se recentemente la regola di Huygens sul centro di oscillazione dei pendoli, che è vera, è stata
revocata in dubbio da alcuni dotti uomini.”
3.4
Urti
Uno dei fenomeni descrivibili in modo semplice con il teorema dell’impulso anziché la seconda legge
della dinamica è sicuramente l’urto tra due punti materiali, ovvero ciò che succede quando le traiettorie
del moto di due punti materiali si incontrano in un dato istante di tempo. Sappiamo che due corpi non
possono occupare un certo volume nello stesso istante e dunque qualcosa deve accadere: i punti materiali restano attaccati l’uno con l’altro, rimbalzano, cambiano le loro traiettorie,... sono certamente
fenomeni con cui abbiamo avuto molte volte a che fare: il lancio di due palline l’una contro l’altra,
il gioco del biliardo, uno scontro tra due automobili, il lancio di una pallina contro ad un muro,... È
importante notare come le forze interne al sistema dei punti materiali che si scontrano sono sempre
molto maggiori di tutte le forze esterne presenti (gravità compresa), per lo meno nell’intervallo di
tempo molto piccolo in cui l’urto avviene; il sistema durante un urto è quindi sempre isolato, pertanto
la quantità di moto totale di un sistema durante un urto si conserva sempre, se si considera
un intervallo di tempo molto piccolo. Classificheremo gli urti quindi non sulla base della conservazione
o meno della quantità di moto, ma sulla base della conservazione o meno dell’energia cinetica:
• Urti elastici: in cui l’energia cinetica si conserva;
• Urti anelastici: in cui l’energia cinetica non si conserva;
• Urti completamente anelastici: urti anelastici in cui i due punti materiali restano uniti dopo
l’urto stesso.
Consideriamo solo l’energia cinetica perché considerando il sistema isolato (per lo meno in un piccolo
intervallo di tempo attorno all’urto stesso) non sono presenti forze che giustifichino la presenza di
energie potenziali. In generale quindi possiamo dire che un urto viene descritto dalle seguenti equazioni:
~qi = ~qf
(3.4.1)
Ei = Ef + ∆E
dove ~qi è il vettore quantità di moto iniziale del sistema, ~qf è il vettore quantità di moto finale
del sistema, Ei è l’energia cinetica iniziale del sistema, Ef è l’energia cinetica finale del sistema e ∆E
l’eventuale energia persa durante l’urto. Il caso più comune di urto anelastico è anche il più complicato,
da risolvere volta per volta affrontando il sistema (3.4.1). Considereremo qui di seguito alcuni esempi
semplici di urti in una o due dimensioni, le cui soluzioni possono essere trovate in generale senza troppe
complicazioni matematiche.
3.4.1
Urti completamente anelastici in una, due o tre dimensioni
Gli urti completamente anelastici sono sicuramente gli urti più semplici da descrivere in termini matematici. Consideriamo due punti materiali di masse m1 ed m2 , velocità ~v1 e ~v2 che si urtino tra loro
Francesco Saitta, Pordenone Febbraio 2017
68
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
Figura 3.2: Urto completamente anelastico
in modo da restare poi attaccati l’uno all’altro: un particolare colpo di biliardo può esemplificare bene
questa situazione in due dimensioni, come mostrato in figura (3.2). Il sistema (3.4.1) diventa quindi
m1~v1 + m2~v2
= (m1 + m2 )~vf
1
1
1
2
2
2
2 m1 v1 + 2 m2 v2 = 2 (m1 + m2 )vf + ∆E
(
~vf
=
∆E =
m1~v1 +m2~v2
m1 +m2
1
1
2
2
2 m1 v1 + 2 m2 v2
− 12 (m1 + m2 )vf2
In generale possiamo quindi dire che, per un urto completamente anelastico si ha:
P
(
m ~v
~vf
= Pi mi i i
i
P
P
∆E = 21 i mi vi2 − 12 i mi vf2
(3.4.2)
In un urto completamente anelastico quindi, date le masse ed i vettori velocità iniziali, possiamo
sempre trovare in modo piuttosto semplice (applicando le relazioni descritte in (3.4.2) ) la velocità
finale dell’insieme dei punti materiali e la perdita di energia cinetica.
3.4.2
Urti elastici in una dimensione
Gli urti elastici, o in generale urti in cui i punti materiali non rimangono attaccati sono in generale
più difficili da risolvere, se risolvere significa predire le velocità finali dei diversi punti materiali conoscendone le velocità iniziali, in quanto ci sono molte variabili incognite. Nel caso unidimensionale, in
mancanza di ulteriori dati oltre alle masse e le velocità iniziali, l’unico caso risolvibile analiticamente
è il caso dell’urto tra due punti materiali: possiamo pensare nuovamente ad un colpo di biliardo in cui
le due palline però si muovono nella stessa direzione, come in figura (3.3). Il sistema di equazioni da
risolvere in questo caso sarà:
m1 v1 + m2 v2
= m1 v10 + m2 v20
02
02
1
1
1
1
2
2
2 m1 v1 + 2 m2 v2 = 2 m1 v1 + 2 m2 v2
Francesco Saitta, Pordenone Febbraio 2017
69
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
Figura 3.3: Urto elastico in una dimensione
dove v 0 sono le velocità finali. Matematicamente il problema si riduce alla risoluzione di un sistema
di due equazioni e due incognite di secondo grado, che possiamo risolvere come esercizio. Il risultato
, scartate le soluzioni non accettabili fisicamente, è dato da:
(
2 )v1 +2m2 v2
v10 = (m1 −m
m1 +m2
(3.4.3)
1 )v2 +2m1 v1
v20 = (m2 −m
m1 +m2
Nel caso degli urti elastici in una dimensione è interessante notare alcuni casi particolari, che si invita
a studiare come esercizio:
• il caso di masse uguali m2 = m1 = m,
• il caso in cui la velocità iniziale di uno dei due punti materiali sia nulla,
• il caso in cui la velocità iniziale di uno dei due punti materiali sia nulla e la sua massa sia
enormemente più grande dell’altra (l’urto di una pallina contro ad un muro).
3.4.3
Urti elastici in due dimensioni
Il caso di urti elastici in due dimensioni, anche se coinvolgenti solo due punti materiali non è sempre
risolvibile conoscendo solo le due masse e le due velocità iniziali:
m1~v1 + m2~v2
= m1~v10 + m2~v20
(3.4.4)
02
02
1
1
1
1
2
2
2 m1 v1 + 2 m2 v2 = 2 m1 v1 + 2 m2 v2
considerando infatti le componenti dei vettori questo sistema diventa un sistema di tre equazioni
e quattro incognite. Esiste però un caso particolare su cui si può dire qualcosa : il caso in cui
Francesco Saitta, Pordenone Febbraio 2017
70
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
m1 = m2 = m e v2 = 0. In questo caso particolare infatti il sistema (3.4.4) diventa:
~v1 = ~v10 + ~v20
0
0
v12 = v12 + v22
(3.4.5)
Le due equazioni ci assicurano che i due vettori ~v10 e ~v20 debbano essere perpendicolari tra loro: infatti
la prima equazione ci garantisce che i tre vettori in questione formino un triangolo mentre la seconda è
il teorema di Pitagora sui lati del triangolo, applicabile come sappiamo solo nel caso in cui il triangolo
sia rettangolo ed i cateti siano ~v10 e ~v20 ! Per risolvere il problema analiticamente trovando le due velocità
serve senz’altro un’altra informazione, ma per lo meno si può dire qualcosa sulla situazione finale.
3.5
Centro di massa e moto di sistemi di particelle
Come si può notare dal sistema generale di equazioni (3.4.1) i casi con più di due particelle possono
essere molto complicati dal punto di vista matematico, anche conoscendo alcuni parametri della situazione finale. In questo paragrafo studieremo il moto del centro di massa di un sistema di particelle
come sintesi dell’evoluzione del sistema stesso. In molti casi complessi questo può essere utile per capire l’evoluzione del sistema o parte di esso, soprattutto quando è impossibile descrivere la traiettoria
dopo l’urto di ogni singola particella che compone il sistema. Ricordiamo che il centro di massa di un
sistema di particelle è definito come il punto in cui possiamo pensare sia applicata la risultante delle
forze peso di tutte le particelle, o dal punto di vista matematico la media, pesata sulle masse, delle
posizioni di ogni singolo punto materiale:
Pn
Pn
mi~ri
ri
m1~r1 + m2~r2 + · · · + mn~rn
i=1 mi~
P
~rcm =
= i=1
=
n
m1 + m2 + · · · + mn
M
i=1 mi
dove il sistema ha n punti materiali ed M è la massa totale del sistema. L’equazione (3.5) può anche
essere scritta secondo le componenti cartesiane:
Pn
i=1 mi xi
x
=
cm
Pn M
my
ycm = Pi=1M i i
n
mz
zcm = i=1M i i
Ora, immaginando che questi punti materiali si stiano muovendo, ognuno con una certa velocità,
andiamo a calcolare qual è la velocità media del centro di massa tra due istanti di tempo t1 e t2 :
~vcm =
~rcm (t2 ) − ~rcm (t1 )
t2 − t1
Pn
=
=
=
=
=
mi ~
ri (t2 )
M
m~
r (t )
i=1
M (t2 − t1 )
Pn
~ i
∆r
i=1 mi (t2 −t1 )
M
Pn
=
Pn
− i=1 Mi i 1
t2 − t1
Pn
P
m
~
r
(t2 ) − ni=1 mi~ri (t1 )
i
i
i=1
M (t2 − t1 )
Pn
ri (t2 ) − mi~ri (t2 ))
i=1 (mi~
M (t2 − t1 )
Pn
~ i
mi ∆r
i=1
i=1 mi vi
Francesco Saitta, Pordenone Febbraio 2017
M
71
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
Ovvero per le velocità medie, e quindi anche per quelle istantanee vale il fatto che la velocità del centro
di massa è la media, pesata con le masse, delle velocità di tutte le singole particelle componenti il
sistema. Analogamente possiamo anche concludere che
Pn
mi~ai
~acm = i=1
M
Riusciamo quindi a definire la cinematica del centro di massa a partire dalla cinematica
dei punti materiali componenti il sistema:
Pn
ri
i=1 mi~
~rcm =
(3.5.1)
Pn M
vi
i=1 mi~
~vcm =
(3.5.2)
Pn M
ai
i=1 mi~
~acm =
(3.5.3)
M
(3.5.4)
In particolare possiamo riscrivere la seconda equazione (3.5.2) nel seguente modo:
~qcm = M~vcm =
n
X
mi~vi = ~qi
(3.5.5)
i=1
e la terza (3.5.3) come:
M~acm =
n
X
~
mi~ai = R,
(3.5.6)
i=1
~ la risultante di tutte le forze agenti sul sistema.
con ~qi la quantità di moto iniziale del sistema e R
Possiamo quindi concludere che per il centro di massa valgono le stesse leggi della cinematica e della
dinamica che abbiamo visto fin’ora per un sistema con un punto materiale soltanto: il centro di
massa è un punto che riassume in sé tutta la fisica di un sistema di particelle.
Primo principio della dinamica e conservazione della quantità di moto In un sistema di
particelle isolato la quantità di moto del centro di massa si conserva, esso è quindi in equilibrio ovvero
persiste nel suo stato di quiete o di moto rettilineo uniforme!
Secondo principio della dinamica e teorema dell’impulso La risultante delle forze agenti sul
sistema è uguale alla massa totale del sistema moltiplicata per il vettore accelerazione del centro di
massa ovvero la forza risultante che agisce sul sistema è causa della variazione di quantità di moto del
centro di massa del sistema!
In altre parole, non importa quanti e quali urti facciano tra loro le particelle componenti il sistema, il centro di massa continuerà fare il suo moto, in equilibrio se il sistema è isolato, secondo le leggi
del moto derivanti dalle forze agenti se il sistema non è isolato. Gli esempi e le applicazioni di questa
analisi sono molte e molto utilizzate: possiamo pensare ad esempio di voler descrivere il moto del
centro di massa di un fuoco d’artificio (che continua il suo moto parabolico indipendentemente dal
numero di frammenti in cui si spezza - i frammenti anzi sono vincolati a spostarsi facendo in modo
che il centro di massa continui il moto parabolico) o la descrizione degli urti tra particelle della fisica
nucleare e la conseguente cinematica delle particelle dopo l’urto all’interno dei grandi acceleratori di
particelle nel mondo. Dopo le analisi fatte in questo paragrafo, il sistema di riferimento del centro di
massa di un sistema di particelle diventa un luogo privilegiato da cui descrivere un sistema di punti
materiali.
Francesco Saitta, Pordenone Febbraio 2017
72
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
3.6
Esercizi
1. Un giocatore di tennis imprime una forza media Fm = 50 N su di una pallina (m = 57 g) che
arriva alla racchetta con una velocità vi = 70 km/h. Supponendo che l’impatto tra racchetta
e pallina duri 0,1 secondi, quale sarebbe la velocità della pallina dopo il colpo se non ci fosse
deformazione della pallina durante l’urto?
[vf = 245, 8 km/h]
2. Si calcoli la forza media che un pugile deve imprimere ad un sacco da 30 kg affinché esso si muova
con una velocità v = 2 m/s, supponendo che l’impatto tra guanto e sacco duri 0,3 secondi.
[Fm = 200 N]
3. Si calcoli la variazione di quantità di moto di un sistema su cui agisce una forza media esterna
esterna Fm = 500 N per un decimo di minuto.
[∆q = 3000 kg m/s]
4. Un calciatore in grado di imprimere una forza massima F = 500 N ad una palla di massa m = 200
g vuole far raggiungere alla palla una velocità v = 120 km/h. Quanto deve durare l’impatto tra
piede e pallone?
[∆t = 0, 01 s]
5. Un battitore di baseball riesce a colpire la palla lanciata dall’avversario. Supponendo che la palla
di massa m = 100 g sia arrivata in orizzontale con una velocità vi = 30 m/s, che l’impatto con
la mazza duri ∆t = 5 ms e che dopo l’impatto la pallina abbia una velocità vf = 50 m/s e formi
un angolo α = 30◦ rispetto l’orizzontale, qual è l’intensità della forza applicata dal battitore alla
pallina?
[F = 1549 N]
6. Un carrello di massa M = 50 kg si sta muovendo orizzontalmente alla velocità costante v = 30
km/h. Quale sarà la velocità finale del carrello se da esso cade verticalmente un sacchetto di
massa m = 5 kg?
[vf = 9, 3 m/s]
7. Se dallo stesso carrello del problema (6) viene lanciata una palla da 1 kg in direzione opposta
alla marcia del carrello con velocità vp = 20 km/h, quale sarà la velocità finale del carrello?
[vf = 8, 6 m/s]
8. Se dallo stesso carrello del problema (6) viene lanciata una palla da 1 kg nella stessa direzione
della marcia del carrello con velocità vp = 20 km/h, quale sarà la velocità finale del carrello?
[vf = 8, 4 m/s]
9. Antonio (A) lancia una palla, calciandola da terra con una velocità iniziale v0 = 10 m/s con
un angolo rispetto l’orizzontale α = π/3 rad, a Barbara (B) che si trova seduta su un carrello
Francesco Saitta, Pordenone Febbraio 2017
73
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
ad una altezza 20 cm da terra. Se la massa della palla è m = 200 g e la massa complessiva di
carretto e Barbara è M = 100 kg, si calcoli la velocità finale del carrello.
[vf = 10−2 m/s]
10. Un fuoco d’artificio di massa m viene lanciato in verticale. Nel punto più alto della sua traiettoria il fuoco scoppia in 2 pezzi, il primo di massa m/3, il secondo di massa 2m/3. Si descriva
il moto di ogni singolo pezzo del fuoco d’artificio dopo lo scoppio, se il pezzo di massa minore
appena dopo lo scoppio ha una velocità v1 = 5 m/s.
[Ogni pezzo fa un moto parabolico con velocità iniziale orizzontale, il primo con v1 = 5 m/s, il
secondo con v2 = 2, 5 m/s]
11. Una cinquecento (m = 680 kg) tampona un camion (M = 5000 kg) alla velocità v = 60 km/h.
Supponendo un urto completamente anelastico tra i due veicoli quale sarà la velocità finale del
sistema cinquecento/camion?
[vf = 7 km/h]
12. Si calcoli la variazione di energia cinetica del sistema nell’esercizio precedente.
[∆Ec = −83700 J]
13. Un placcaggio di rugby può essere considerato (se va a buon fine) come un urto completamente
anelastico. Si calcoli il modulo della velocità dei due giocatori appena dopo l’impatto se il primo
(m1 = 100 kg) si stava muovendo con una velocità v1 = 10 m/s formante un angolo α = π/3
rad con la direzione della velocità secondo (m2 = 90 kg, v2 = 8 m/s).
[vf = 7, 9 m/s]
14. Un urto completamente anelastico è caratterizzato da una perdita di energia cinetica ∆Ec = 100
J. Se l’urto è avvenuto tra due corpi di ugual massa, uno dei due inizialmente fermo e l’altro con
quantità di moto iniziale q1 = 50 kg m/s, quanto vale la velocità finale del sistema?
[vf = 4 m/s]
15. Due corpi di masse m1 = 5 kg e m2 = 10 kg si stanno muovendo con velocità di intensità v1 = 10
m/s e v2 = 8 m/s. Per quale angolo tra le due velocità si ha la massima dispersione di energia
cinetica durante l’urto? Ed in tal caso quanto vale questa dispersione?
[α = π rad, ∆Ec = −540 J]
16. Rispetto all’esercizio (7) si calcoli l’angolo per la dispersione minima di energia ed il valore di
tale dispersione.
[α = 0 rad, ∆Ec = −2, 3 J]
17. Due masse m1 = 10 kg ed m2 = 20 kg urtano in modo completamente anelastico avendo velocità
iniziali v1 = 5 m/s e v2 = 2, 5 m/s. Se la velocità finale del sistema ha modulo vf = 1 m/s quale
era l’angolo tra le velocità v~1 e v~2 ?
[α = 2, 5 rad]
Francesco Saitta, Pordenone Febbraio 2017
74
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
18. Due palline di pongo fanno tra loro un urto completamente anelastico, la prima viene lanciata
frontalmente contro la seconda con una velocità v1 = 5 m/s. Si misura come velocità finale delle
due palline vf = 2 m/s. Se le due palline hanno la medesima massa m = 250 g, qual è la velocità
v2 della seconda pallina?
[v2 = 1 m/s]
19. Due palline da biliardo, entrambe di massa m = 200 g si scontrano facendo un urto elastico.
Supponendo che la prima si scontri con la seconda, inizialmente ferma, ad una velocità v1 = 3
m/s qual è la velocità finale di ciascuna pallina?
[v1f = 0 m/s; v2f = 3 m/s]
20. Si risolva il problema (19) supponendo che m1 = 200 g ed m2 = 250 g.
[v1f = −0, 3 m/s; v2f = 2, 7 m/s, con segno positivo dato dal verso iniziale di v1 ]
21. Si risolva il problema (20) supponendo che la seconda pallina abbia una velocità iniziale v2 = 2
m/s nella stessa direzione di ~v1 ma con verso opposto.
[v1f = −2, 6 m/s; v2f = 2, 4 m/s, con segno positivo dato dal verso iniziale di v1 ]
22. Tre palline (m1 = 2m2 = 4m3 = 250 g) sono disposte come in figura (22). Si trovino le velocità
finali delle tre palline supponendo che tutti gli urti siano elastici.
Figura 3.4: .
[v1f = 3, 3 m/s; v2f = 4, 4 m/s; v3f = 17, 7 m/s]
23. Data la situazione in figura (23) si calcolino le velocità finali delle palline 1 e 2, assumendo tra
loro un urto elastico:
[v1f = −6 m/s; v2f = 4 m/s, con segno positivo dato dal verso iniziale di v1 ]
24. Data la situazione in figura (24) si trovi la distanza dal tavolino a cui cadono le due palline 1 e
2, assumendo un urto elastico tra le due palline:
[d1 = 0, 25 m; d2 = 1, 15 m]
25. Una pallina viene lasciata cadere su un piano inclinato (α = π/3 rad rispetto l’orizzontale) senza
attrito da un’altezza h = 2 m. Supponendo che l’urto tra la pallina e il pavimento orizzontale
Francesco Saitta, Pordenone Febbraio 2017
75
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
Figura 3.5: .
Figura 3.6: .
una volta arrivata in fondo al piano inclinato sia elastico, si calcoli a quale distanza dalla base
del piano la pallina toccherà terra di nuovo.
[d = 3, 5 m]
26. Si risolva il problema (25) ipotizzando un urto anelastico nel quale la pallina perde il 40% della
sua energia.
[d = 2, 1 m]
27. Due palle da biliardo m1 = 2 kg ed m2 = 5 kg di velocità iniziali v1 = 5 m/s e v2 = 8 m/s di
verso opposto si scontrano frontalmente. Quali sono le velocità finali se l’urto è anelastico e la
perdita di energia ammonta al 30% dell’energia iniziale?
[v1f = 1, 6 m/s; v2f = 11 m/s]
28. Una pallina viene sparata contro un bersaglio collegato ad una molla, come in figura (28). Si
calcoli la velocità iniziale del proiettile se la massima compressione della molla è di ∆ = 4 cm.
Si consideri l’urto tra pallina e molla come completamente anelastico.
[vp = 253 m/s]
Francesco Saitta, Pordenone Febbraio 2017
76
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
Figura 3.7: .
29. Si risolva l’esercizio (28) nell’ipotesi in cui l’urto tra pallina e molla sia elastico.
[vp = 125 m/s]
30. Si risolva l’esercizio (28) nell’ipotesi in cui l’urto tra pallina e molla sia anelastico con una perdita
di energia del 20% rispetto l’energia iniziale.
[vp = 132 m/s]
31. Dato il doppio pendolo il figura (31) si calcoli l’altezza (distanza minima dal soffitto) raggiunta
dalla pallina m se l’urto tra le due palline è da considerarsi elastico.
Figura 3.8: .
[hm = 0, 3 m]
32. Si risponda alla domanda dell’esercizio (31) nel caso in cui l’urto tra le palline sia completamente
anelastico.
[hm = 1, 2 m]
Francesco Saitta, Pordenone Febbraio 2017
77
CAPITOLO 3. QUANTITÀ DI MOTO ED URTI
33. Una massa M = 2 kg è appesa verticalmente ad una molla di costante elastica k = 1000 N/m.
Una freccetta (m = 50 g) viene lanciata verticalmente dal basso verso la massa. Supponendo
che la freccetta abbia una velocità vf = 3 m/s un istante prima di colpire la massa si calcoli la
massima compressione (rispetto alla sua posizione di riposo) della molla dopo l’urto, da considerarsi completamente anelastico.
[∆ = 18 mm]
34. Si consideri la situazione dell’esercizio (31) con il seguente cambiamento: la pallina m2 sia appoggiata sul piano senza essere collegata al filo del pendolo. Si assuma il coefficiente d’attrito
tra pallina e pavimento k = 0, 2. Supponendo che l’urto tra le due palline sia un urto anelastico
con energia dispersa pari a ∆E = 10 J, si calcoli il lavoro fatto dalla forza d’attrito per fermare
la pallina m2 . Si calcoli inoltre in quanto tempo la pallina si ferma e quanto spazio percorre
prima di fermarsi.
[t = 2, 2 s; s = 4, 7 m; L = 23 J]
35. Find the final speed of an electron, which moves at ve = 5000 m/s, after an elastic collision with
a standstill proton. Find also the final speed of the proton.
[ve = −4994 m/s; vp = 6 m/s]
36. Find the average strength that causes a change of momentum of a system ∆q = 50 kg m/s acting
on it for ∆t = 20 s.
[Fm = 2, 5 N]
37. A block of mass m1 is initially at rest on a frictionless horizontal surface. A bullet of mass
m2 is fired at the block with a speed v. The bullet sticks in the block, and the block ends up
with a speed V . What is the momentum of the bullet with speed v (in terms of m1 , m2 , and V ) ?
[q = (m1 + m2 )V ]
38. Consider two cars (m1 = 600 kg and m2 = 1200 kg) crashing at a intersection between the two
streets they were travelling. The two streets are perpendicular and the two speeds are v1 = 40
m/s and v2 = 10 m/s. Find the final velocity of the cars if the crash can be approximated as a
completely inelastic collision.
[vf = 14, 9 m/s with and angle α = 0, 46 rad with respect to car 1]
39. Calculate the momentum of a rhino (m = 3500 kg) charging a hunter at a speed of 9 m/s.
Compare the rhino’s momentum with the momentum of a tranquilizer dart (m = 0, 2 g) fired at
a speed v = 500 m/s. What is the loss of kinetic energy of the rhino just after the collision if
the hunter hits him with the tranquilizer dart?
[qr = 31500 kg m/s; qd = 0, 1 kg m/s; ∆Ec = 3 J]
Francesco Saitta, Pordenone Febbraio 2017
78
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
Capitolo
4
Momento angolare e moto rotatorio
Nel corso del biennio abbiamo imparato che un sistema è un equilibrio se la risultante delle forze agenti
sul sistema è nulla (equilibrio di traslazione) e se la risultante di tutti i momenti delle forze agenti
sul sistema è nulla (equilibrio rotazionale). Abbiamo poi studiato approfonditamente la dinamica dei
punti materiali fuori dall’equilibrio, con le tre leggi di Newton, ma non abbiamo mai studiato cosa
succede ad un corpo rigido nel momento in cui la somma dei momenti delle forze sia diversa da zero.
L’argomento centrale di questo capitolo è proprio lo studio di corpi rigidi fuori equilibrio, quando cioè
ruotano di moto non uniforme.
I moti rotatori di un corpo rigido, che ricordiamo è un corpo non soggetto a deformazioni in cui
cioè le mutue distanze tra i punti che lo compongono restano invariate nel tempo, possono
essere molto complessi da descrivere sia in termini fisici che matematici. Per questo noi ci limiteremo
a descrivere in modo analitico solamente il caso in cui la rotazione del corpo avvenga lungo un certo
asse fissato1 : specificheremo di volta in volta i concetti che valgono in generale e quelli che valgono
solamente rispetto alla nostra situazione di studio.
Fu Eulero (Basilea, 1707 - San Pietroburgo, 1783) con uno dei suoi più importanti libri (Euler, 1765)
uno dei primi scienziati a descrivere in modo analitico ed esauriente la dinamica dei corpi rigidi, in
particolare con riferimento al momento d’inerzia. Nell’opera troviamo tanto le definizioni di corpo
rigido, momento d’inerzia e moto rotatorio, quanto tutti i calcoli per descrivere al meglio il fenomeno.
Eulero certamente fu una delle menti matematiche e fisiche più importanti ed influenti della storia
della scienza, scrisse moltissimo e molte delle sue intuizioni furono di fondamentale importanza per lo
sviluppo successivo di matematica e fisica.
4.1
Momento d’inerzia
Quando abbiamo studiato un sistema fuori dall’equilibrio di traslazione abbiamo osservato che l’effetto
dell’applicazione di una forza su un punto materiale è l’accelerazione, ovvero il moto rettilineo non
uniforme del punto materiale stesso; analogamente ci aspettiamo che l’effetto dell’applicazione di un
momento di una forza su un corpo rigido sia un moto rotatorio non uniforme del sistema, ovvero il
presentarsi di un’accelerazione angolare. Se questo è vero, ci aspettiamo di trovare un’equazione del
1
Possiamo immaginare di studiare un sistema con asse di rotazione fissato oppure un sistema con asse di rotazione
variabile in un intervallo di tempo talmente piccolo che la variazione dell’asse non è significativa per la nostra analisi.
Francesco Saitta, Pordenone Febbraio 2017
79
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
tipo:
~ = Iα
M
~
(4.1.1)
~ è la risultante dei momenti di forza applicati al sistema, α l’accelerazione angolare ed I una
dove M
certa costante di proporzionalità tra le due grandezze. La costante di proporzionalità è chiamata
momento d’inerzia, si misura in kg·m2 e fa le veci della massa inerziale nella dinamica lineare: è
l’inerzia rotazionale del corpo, ciò che si oppone alla variazione di stato di moto rotatorio del corpo
quando soggetto a momenti di forza. Facciamo notare qui che la relazione (4.1.1) ha senso nel momento
in cui la rotazione avviene attorno ad un asse fissato, come vedremo in seguito il momento d’inerzia
può essere calcolato e dipende dalla geometria dell’oggetto ma anche dall’asse di rotazione dell’oggetto
stesso: cambiando l’asse di rotazione I non è più costante e l’equazione data deve essere modificata.
Nei prossimi paragrafi cercheremo di darci ragione dell’equazione (4.1.1) assumendo sempre rotazioni
attorno ad un asse fissato in casi via via più complessi.
4.1.1
Rotazione di un punto materiale
Immaginiamo un punto materiale in rotazione attorno ad un asse fisso sotto l’effetto di una forza
costante F~ diretta lungo la direzione della velocità tangenziale ~v , come descritto in figura (4.1).
Possiamo immaginare che il punto materiale sia una persona seduta sul bordo di un tagadà 2 nel
momento in cui la giostra inizia a girare sotto l’effetto di una coppia di forze costante, ancora senza
~ = ~r × F~ perpendicolare
inclinazione rispetto al suolo. Evidentemente la forza F~ genera un momento M
Figura 4.1: Rotazione accelerata di un punto materiale
al piano su cui ruota il punto materiale, ma anche un’accelerazione tangenziale, che non modifica la
distanza dal centro O del punto, ma aumenta la velocità tangenziale e quindi quella angolare del punto
di massa m: v(t) = ω(t)r. Proviamo quindi a studiare la meccanica del sistema:
2
giostra meccanica presente in molti parchi dei divertimenti composta da un disco che può ruotare attorno al suo
centro, anche attorno ad assi non perpendicolari al terreno
Francesco Saitta, Pordenone Febbraio 2017
80
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
• Il modulo del momento della forza è ottenibile secondo la formula M = rF , essendo la forza
sempre perpendicolare al raggio,
• La forza è sempre tangente alla traiettoria, contribuisce quindi ad una accelerazione tangenziale
secondo il principio della dinamica F = mat ,
• Essendo la forza costante anche l’accelerazione è costante e dunque l’accelerazione tangenziale
media è sempre uguale all’accelerazione tangenziale istantanea, per cui possiamo scrivere:
at =
ω(t2 ) − ω(t1 )
∆ω
∆v
∆(ωr)
ω(t2 )r − ω(t1 )r
=r
=r
=
=
= rα
∆t
∆t
t2 − t1
t2 − t1
∆t
Mettendo assieme tutte queste considerazioni possiamo quindi scrivere:
M
= rF
= rmat
= r2 mα
Il che conferma il fatto che il momento della forza sia direttamente proporzionale all’accelerazione
angolare; ma non solo, questo ragionamento ci fornisce anche l’espressione del momento d’inerzia per
un punto materiale che ruoti lungo una circonferenza:
I = mr2
(4.1.2)
Questa equazione, pur nella sua semplicità, dà molte informazioni sulla natura del momento d’inerzia:
questa grandezza fisica è connessa alla massa ed al modo in cui la massa è distribuita attorno al centro
di rotazione del sistema, più la massa è concentrata attorno al centro e meno inerzia rotazionale ha il
sistema, viceversa più la massa è distante dal centro di rotazione del sistema e più inerzia rotazionale
ha il sistema. Pur studiando un fenomeno molto semplice ed idealizzato possiamo già cominciare a
capire ad esempio come mai per riuscire a completare le evoluzioni in aria i pattinatori od i tuffatori
si rannicchiano attorno all’asse della loro rotazione.
4.1.2
Rotazione di un sistema di punti materiali
Se immaginiamo di complicare la situazione ed avere una serie di n punti materiali tutti ruotanti
attorno allo stesso asse possiamo riproporre lo stesso ragionamento del paragrafo precedente e giungere
alla conclusione che il momento d’inerzia del sistema cosı̀ fatto è dato da:
I=
n
X
mi ri2
(4.1.3)
i=1
Vediamo di nuovo quindi come nel determinare l’inerzia di un sistema non conti solamente la massa
di ogni singolo elemento del sistema ma anche la sua distribuzione rispetto l’asse di rotazione. Questo
passaggio da punto materiale a sistema di punti materiali che ruotano tutti attorno ad uno stesso asse
fisso non è particolarmente significativo dal punto di vista della sua concretezza, ma è importante per
poter definire il momento d’inerzia di un corpo rigido che ruota attorno ad un certo asse fissato.
Francesco Saitta, Pordenone Febbraio 2017
81
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
Figura 4.2: Corpo rigido che ruota attorno ad un asse fisso
4.1.3
Rotazione di un corpo rigido
Consideriamo ora un corpo rigido che ruota attorno ad un asse fisso, come ad esempio una trottola
che ruota in verticale o un pallone da pallacanestro sul dito di un cestista particolarmente abile,
schematizzato come in figura (4.2). In questo caso possiamo pensare di suddividere il corpo rigido
in molte piccole parti di massa dm, ognuna delle quali contribuirà al momento d’inerzia per dm r2
se r è la distanza di questo elemento di massa dall’asse di rotazione. Per sommare poi ogni piccolo
contributo dovremo fare una somma particolare, che in matematica è data da un certo tipo di integrale
(materia di studio dell’ultimo anno di corso di matematica) e che si scrive:
Z
I=
dm r2
(4.1.4)
Evidentemente questo momento d’inerzia ancora dipende da come la massa è distribuita attorno
all’asse di rotazione. Noi al momento non siamo in grado di calcolare questo tipo di momenti d’inerzia,
per cui faremo riferimento a tabelle, facilmente reperibili sul web, in cui sono riportati i valori di alcuni
momenti d’inerzia fissata la geometria del corpo rigido e l’asse di rotazione passante per il centro di
massa del corpo rigido. Per esempio il momento d’inerzia di una sfera omogenea di massa m e raggio
r che ruota attorno ad un asse passante per il suo centro è 2/5 mr2 ; se la sfera è invece cava con
spessore del guscio trascurabile, il momento d’inerzia diventa 2/3 mr2 ; il momento d’inerzia di un
cilindro pieno a base circolare, di massa m e raggio r qualsiasi sia la sua altezza, rispetto ad un asse
passante per il centro della circonferenza di base e parallelo all’altezza è mr2 /2. In ogni caso si può
sempre notare come il momento d’inerzia aumenti man mano che la distribuzione di massa si concentra
lontano dall’asse di rotazione del corpo rigido, diminuisca man mano che la massa si concentra intorno
all’asse. Nei casi in cui l’asse di rotazione non sia passante per il centro di massa del corpo rigido ma
sia parallelo ad un asse passante per il centro di massa si ricorre al Teorema di Steiner.
Francesco Saitta, Pordenone Febbraio 2017
82
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
Teorema di Steiner Il momento d’inerzia di un corpo rigido ruotante attorno ad un asse fisso
parallelo ad un asse passante per il centro di massa cm del corpo rigido stesso è dato dalla relazione
I = Icm + md2
(4.1.5)
Dove Icm è il momento d’inerzia rispetto all’asse passante per il centro di massa, m la massa del
corpo e d la distanza tra i due assi. Ad esempio il momento d’inerzia di una barra sottile di massa
m e lunghezza L rispetto ad un asse passante per il suo centro e perpendicolare alla barra stessa è
1/12 mL2 , se invece l’asse è perpendicolare alla barra ma passante per un suo estremo esso diventa
1/3 mL2 = 1/12 mL2 + m(L/2)2 .
4.2
Momento angolare
I moti rotatori che riusciamo a descrivere in modo analitico al momento sono dunque solamente quelli
con asse di rotazione fisso. Quando l’asse di rotazione non è fissato esiste comunque una relazione tra
i momenti delle forze e le accelerazioni angolari, la complicazione matematica che noi non affronteremo è che la costante di proporzionalità non è un numero: il momento d’inerzia dipende dall’asse di
rotazione e formalmente è rappresentato non da un numero ma da un tensore, oggetto matematico di
cui non ci occupiamo.
Possiamo però descrivere in modo generale la rotazione di un corpo rigido introducendo una nuova grandezza, il momento angolare. Questa grandezza fisica si definisce, per un punto materiale in
movimento, nel seguente modo:
~ = ~r × ~q
L
(4.2.1)
~ è appunto il momento angolare, ~q la quantità di moto ed ~r il raggio vettore che collega il centro
dove L
rispetto a cui vogliamo calcolare il momento angolare e la posizione del punto materiale. Parlando di
un punto materiale che ruota rispetto ad un centro, come nell’esempio (4.1) ~r sarà lo stesso vettore
rispetto a cui si calcola il momento della forza. Sviluppando l’espressione (4.2.1) con i parametri
dell’esempio si ottiene la seguente relazione tra momento angolare e momento d’inerzia del punto
materiale:
~ = I~
L
ω
(4.2.2)
Anche in questo caso l’espressione, con gli opportuni ragionamenti analoghi a quelli fatti nel paragrafo
precedente, è valida solamente per un punto materiale, un sistema di punti o un corpo rigido che
ruotino attorno ad un asse fissato. Per arrivare ad una relazione tra la causa del non equilibrio di
~ ) e questa nuova grandezza dobbiamo considerare la definizione di momento di forza, di
rotazione (M
momento angolare e il teorema dell’impulso (3.1.1)3 :
~
M
= ~r × F~
∆~q
= r×
∆t
r × ∆~q
=
∆t
∆(~r × ~q)
=
∆t
~
∆L
=
∆t
3
In particolare il passaggio ~r × ∆~
q = ∆(~r × ~
q ) è giustificato dalla proprietà distributiva del prodotto vettoriale rispetto
alla somma e divisione
Francesco Saitta, Pordenone Febbraio 2017
83
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
Con ragionamenti analoghi a quelli fatti in precedenza possiamo concludere che la relazione
~
~ = ∆L
M
∆t
(4.2.3)
~ . Questa
è valida per qualsiasi corpo rigido su cui stia agendo un momento delle forze risultante M
espressione è indipendente dal fatto che la rotazione avvenga rispetto ad un asse fisso, vale in generale:
l’applicazione di un momento di forza su un corpo rigido è dunque causa di una variazione
di momento angolare. L’espressione (4.2.3) si riferisce al momento medio applicato nell’intervallo
di tempo ∆t, se volessimo considerare invece il momento istantaneo troveremmo la relazione:
~
~ = dL
M
dt
(4.2.4)
che giustificheremo matematicamente quando nel corso di matematica verranno affrontate le derivate.
4.3
Teorema di conservazione del momento angolare
Abbiamo ormai iniziato a capire che un legge formalmente come la (4.2.4), in cui l’effetto di una certa
causa è la variazione di una grandezza fisica, prelude ad una legge di conservazione: se la causa è assente infatti non vi è variazione dell’effetto e dunque la grandezza in questione si conserva. Arriviamo
cosı̀ ad un nuovo teorema di conservazione.
In un sistema in cui la risultante dei momenti di forza è nulla il momento angolare
totale del sistema si conserva:
~
~ = ~k
~ = ~0 ⇐⇒ dL = ~0 ⇐⇒ L
M
dt
(4.3.1)
Aggiungiamo quindi la conservazione del momento angolare alle considerazioni ed all’elenco fatto
precedentemente (3.2). L’importanza e l’effetto della conservazione del momento angolare può essere
testata da ognuno di noi in casa, a patto di possedere una sedia girevole: sedendosi sulla sedia girevole
ed iniziando a ruotare sulla sedia possiamo notare come allargare le braccia faccia frenare la rotazione,
mentre stringerle a noi la facciamo accelerare4 ; dopo aver provato questo esperimento fatto in casa
e verificato che in effetti accade proprio ciò che abbiamo descritto, si provi a spiegare questo effetto
sulla base della conservazione del momento angolare e dalle definizioni date precedentemente.
4.4
Dinamica rotazionale
Studiare la dinamica rotazionale significa capire quanto lavoro fanno le forze esterne quando vengono
applicate ad un corpo rigido, e come questo lavoro sia legato alla variazione di energia cinetica che
chiameremo rotazionale del sistema. Per far questo ci riferiremo sempre ad un punto materiale che
ruota lungo una circonferenza di raggio fissato sotto l’effetto di una forza di modulo costante F sempre
tangente alla traiettoria del punto; generalizzeremo poi i risultati ottenuti ad un qualsiasi corpo rigido
omettendo i ragionamenti ed i passaggi matematici che abbiamo accennato nei paragrafi precedenti
e che non siamo ancora in grado di effettuare formalmente. Per i passaggi matematici ci riferiremo
quindi sempre alla figura (4.3).
4
naturalmente trascuriamo gli effetti del momento della forza peso sulle braccia e ci scontriamo con l’attrito che
fa comunque rallentare la rotazione: per effettuare al meglio l’esperimento dovremmo essere nel vuoto con una sedie
perfettamente oliata...
Francesco Saitta, Pordenone Febbraio 2017
84
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
Figura 4.3: Punto materiale in rotazione accelerata
4.4.1
Lavoro dei momenti delle forze
Consideriamo la situazione descritta in precedenza e cerchiamo di calcolare il lavoro fatto dalla forza
F~ in un certo intervallo di tempo. Per far ciò dobbiamo considerare un pezzo di traiettoria curvilinea
s talmente piccolo da essere confondibile con la corda ~s = ~r(t2 ) − ~r(t1 ); con questa approssimazione
possiamo affermare che la forza F~ è parallela al vettore ~s, vettore spostamento che coincide con lo
spazio percorso nell’intervallo di tempo (t2 − t1 ) ed anche che s = rθ, θ l’angolo spazzato dal punto
materiale. Possiamo quindi giustificare i seguenti passaggi:
L = F~ · ~s
= Fs
= F rθ
= Mθ
Pur avendo schematizzato la situazione possiamo dire che il lavoro fatto da un momento torcente
costante su un qualsiasi corpo rigido è dato dal prodotto tra il modulo del momento per l’angolo
spazzato dal corpo rigido attorno all’asse di rotazione, che resta fisso nell’ipotesi di momento torcente
costante:
L = Mθ
(4.4.1)
Naturalmente possiamo calcolare anche la potenza sviluppata dal momento torcente dividendo il lavoro
fatto per l’intervallo di tempo ottenendo
P = M ω,
(4.4.2)
dove ω è la velocità angolare media del corpo rigido nell’intervallo di tempo (t2 − t1 ), o istantanea
nell’approssimazione in cui l’intervallo di tempo sia molto piccolo rispetto a tutto il moto considerato.
Francesco Saitta, Pordenone Febbraio 2017
85
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
4.4.2
Energia cinetica rotazionale
Evidentemente se la risultante dei momenti torcenti agenti su un sistema fa lavoro secondo la formula
(4.4.1) il sistema, secondo la definizione di energia introdotta nel primo capitolo, acquisterà energia
cinetica in quantità uguale al lavoro fatto dalla risultante dei momenti (trascurando tutti gli attriti
agenti sul sistema). Per capire come è fatta questa energia cinetica rotazionale, dovuta cioè al lavoro
dei momenti torcenti, dobbiamo ricordare la cinematica del moto circolare uniformemente accelerato:
1
α(t − ti )2 + ωi (t − ti ) + θi
2
ω(t) = α(t − ti ) + ωi
θ(t) =
con α l’accelerazione angolare del sistema. Nel corso dei calcoli che seguiranno è utile la seguente
relazione che esprime la velocità angolare media in funzione della velocità angolare finale e quella
iniziale nel caso di un moto circolare uniformemente accelerato:
θf − θi
ωm =
∆t
1
2 + ω ∆t + θ − θ
α(∆t)
i
i
i
= 2
∆t
1
α∆t + ωi
=
2
α∆t + 2ωi
=
2
α∆t + ωi + ωi
=
2
ωf + ωi
=
2
A questo punto basta notare come un corpo rigido sotto l’effetto di un momento torcente costante il
sistema compie un moto circolare uniformemente accelerato caratterizzato dalle relazioni appena viste
e seguire il seguente calcolo:
L = Mθ
∆L
=
∆θ
∆t
Iωf − Iωi
=
∆θ
∆t
∆θ
= (Iωf − Iωi )
∆t
= (Iωf − Iωi )ωm
ωf + ωi
= (Iωf − Iωi )
2
(ωf − ωi )(ωf + ωi )
= I
2
2
2
ωf − ωi
= I
2
Iωf2
Iω 2
=
− i
2
2
che evidenzia come il lavoro dei momenti torcenti dipenda solamente dalle velocità angolari iniziali e
finali. Questa espressione dice dunque la quantità di energia cinetica guadagnata dal sistema quando
Francesco Saitta, Pordenone Febbraio 2017
86
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
partendo da una velocità angolare ωi raggiunge una velocità angolare ωf sotto l’effetto del momento
torcente costante di modulo M . L’espressione dell’energia cinetica rotazionale è dunque:
1
Ec = Iω 2
2
4.4.3
(4.4.3)
Moti di un corpo rigido
Cerchiamo ora di riassumere i possibili movimenti di un corpo rigido alla luce di tutte le cose studiate
fino ad ora. Considereremo come caso di studio un disco omogeneo, concretizzabile per esempio con
una ruota di bicicletta o di un’automobile o di una motocicletta. Le considerazioni che seguono possono
poi essere applicate ad un generico corpo rigido.
Traslazione pura
Il moto più semplice che possiamo immaginare e che abbiamo già introdotto nel corso del primo biennio di corso è il moto di traslazione pura, ovvero il moto per cui ogni elemento del corpo rigido si
muove con la stessa velocità (sia essa costante o variabile). In questo caso, illustrato in figura (4.4),
il centro di massa del disco si muove con la stessa velocità di ogni punto del corpo: possiamo pensare
ad esempio ad una ruota che poggia su un piano completamente privo di attrito e viene spinta orizzontalmente all’altezza del centro del disco stesso.
Figura 4.4: Traslazione pura
Dal punto di vista energetico in questo caso la ruota di massa m ha un’energia cinetica dovuta solo
dalla componente di traslazione e data dall’espressione:
1
Ec = mv 2
2
Francesco Saitta, Pordenone Febbraio 2017
87
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
Rotazione pura
In questo capitolo abbiamo introdotto un modo per descrivere la rotazione di un corpo rigido dal
punto di vista della sua dinamica. Il moto di rotazione più semplice per un corpo rigido è chiamato
rotazione pura ed è la rotazione attorno ad un fulcro, senza considerare l’attrito sul fulcro stesso.
Immaginiamo per esempio di far ruotare la ruota di una bicicletta sollevandola da terra. In figura
(4.5) è descritto il moto del disco quando la rotazione avviene attorno al centro di massa: il centro
di massa resta fermo, mentre tutti i punti del disco hanno la stessa velocità angolare (costante o
variabile che sia). La velocità tangenziale di ogni punto materiale del disco è quindi sempre tangente
alla circonferenza di centro il centro di massa e raggio la distanza tra centro e posizione del punto
materiale stesso: a parità di distanza dal centro il modulo della velocità tangenziale è sempre la stessa.
Figura 4.5: Rotazione pura
Dal punto di vista energetico in questo caso la ruota ha un’energia cinetica dovuta solo dalla componente di rotazione e data dall’espressione:
1
Ec = Iω 2
2
con I il momento d’inerzia del disco ed ω la velocità angolare di ogni punto del disco stesso.
Rotolamento puro
Il moto di rotolamento puro è la combinazione dei due moti visti in precedenza, possiamo immaginarlo
come il moto della ruota di una bicicletta quando è completamente assente lo scivolamento della ruota
sul terreno: il punto di contatto tra ruota e terreno è sempre in quiete. La figura (4.6) illustra la situazione della velocità di alcuni punti della ruota: è semplicemente la somma vettoriale delle velocità
Francesco Saitta, Pordenone Febbraio 2017
88
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
Figura 4.6: Puro rotolamento
dei due casi precedenti.
Dal punto di vista energetico in questo caso la ruota ha un’energia cinetica dovuta sia alla componente
di traslazione che a quella di rotazione e data quindi dall’espressione:
1
1
2
Ec = mvcm
+ Iω 2
2
2
4.5
Parallelismo tra dinamica traslatoria e rotatoria
In questo capitolo abbiamo studiato la dinamica rotatoria dei corpi rigidi ed abbiamo potuto notare
come ci siano moltissime analogia formali e concettuali tra la dinamica rotatoria e quella traslatoria
già studiata in precedenza. La tabella (4.5) le riassume ed evidenzia, i diversi simboli sono gli stessi
utilizzati in precedenza pertanto non necessitano ulteriori spiegazioni. È invece importate riflettere
sulla portata di tale osservazione: sembra proprio vero che l’Universo sia scritto in termini matematici
(Galilei, 1623)!!! Ed è interessante e sconvolgente da certi punti di vista come leggi fisiche descrivono
concetti analoghi siano descritte allo stesso modo in termini matematici: ad esempio la relazione causa
~ = Iα
effetto e la definizione di inerzia trovano in F~ = m~a e M
~ , due equazioni che differiscono solo per
il nome dato alle variabili, la loro espressione matematica o l’espressione del teorema di conservazione
di grandezze fisiche diverse tra loro ha la stessa forma matematica. Questo fa davvero pensare al
mistero della capacità della matematica nel descrivere la natura ed all’estrema armonia e simmetria
presente nelle leggi che regolano il nostro universo.
Francesco Saitta, Pordenone Febbraio 2017
89
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
Moti traslatori
Moti rotatori
~s
~v
θ
ω
~
~a
F~
α
~=
~
M
m
F~ = m~a
I
~ = Iα
M
~ = I~
L
ω
~q = m~v
F~ = d~q
d~
ω
dt
~ = dL~
M
dt
~
~ = ~k
~
M =0⇒L
dt
F~ = ~0 ⇒ ~q = ~k
L = F~ · ~s
L = Mθ
P = F~ · ~v
Ec = 12 mv 2
P = Mω
Ec = 21 Iω 2
Tabella 4.1: Parallelismo tra le quantità della dinamica traslatoria e quelle della dinamica rotatoria
4.6
Equazioni cardinali della dinamica
Sappiamo che ai fisici piace molto la sintesi e l’idea di descrivere il maggior numero di fenomeni naturali
con il minor numero di equazioni è un punto fisso per le comunità scientifiche in tutta la storia della
fisica; concludiamo quindi il capitolo mettendo in evidenza le due equazioni più importanti tra quelle
viste, quelle che mettono in relazione le cause della variazione delle quantità che in assenza di queste
cause resterebbero costanti, che chiamiamo equazioni cardinali della dinamica poichè a partire da
queste possiamo definire i teoremi di conservazione e ricostruire tutta la dinamica vista fin’ora:
Francesco Saitta, Pordenone Febbraio 2017
F~
=
~
M
=
d~q
dt
~
dL
dt
(4.6.1)
(4.6.2)
90
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
4.7
Esercizi
1. Si calcoli il momento angolare della terra nel suo moto di rivoluzione attorno al sole.
[L = 2, 6 × 1040 kg m2 /s]
2. Si calcoli il momento angolare della terra nel suo moto di rotazione; si approssimi la terra ad
una sfera rotante attorno ad un suo diametro.
[L = 7 × 1027 kg m2 /s]
3. Si calcoli il momento angolare di un disco 33 giri, nell’ipotesi che la sua massa sia m = 180 g.
[L = 7 × 10−3 kg m2 /s]
4. Un motore è in grado di erogare una coppia di intensità 200 Nm per un massimo di 3,5 secondi.
Di quanto varia il momento angolare dell’albero cui il motore è collegato?
[∆L = 700 kg m2 /s]
5. Un disco di massa m = 5 kg e raggio R = 30 cm inizia a ruotare attorno al suo asse. In 10
secondi passa da una velocità angolare ωi = 3 rad/s ad una velocità angolare ωf = 6 rad/s.
Qual è l’intensità del momento torcente che ha causato questa accelerazione?
[M = 0, 07 Nm]
6. Un disco di massa m = 10 kg e raggio R = 50 cm sta ruotando alla frequenza ν = 2 Hz. Si ferma
per effetto delle forze d’attrito in 4 secondi. Qual è l’intensità del momento torcente applicato
dalle forze d’attrito sul disco?
[M = 3, 9 Nm]
7. Un giocatore di pallacanestro fa ruotare la palla su un dito finché la palla gira ad una frequenza
superiore a ν = 30 Hz. Supponendo che inizi a far girare la palla con una velocità angolare
ωi = 250 rad/s, e che l’attrito agisca sulla palla con un momento torcente di modulo M = 5
Nm, per quanto tempo riuscirà il giocatore a far ruotare la palla sul suo dito? Si supponga la
palla una sfera (piena) perfetta di massa M = 600 g e raggio R = 24 cm.
[∆t = 0, 17 s]
8. Che momento torcente deve applicare un ragazzo per far ruotare le sue due bolas (m = 200
g l’una) facendo raggiungere loro una velocità ω = 4 rad/s in 15 secondi? Si supponga che le
bolas siano sfere perfette che si trovano alle estremità di un cordino lungo 1,2 m, fatto ruotare
tenendone il centro in mano.
[M = 0, 04 Nm]
9. Uno scienziato vuole conoscere il momento d’inerzia di uno strano oggetto, rispetto almeno uno
dei suoi assi di simmetria. Ha l’idea di iniziare a farlo ruotare attorno all’asse prescelto, per
riuscire nel suo intento. Rispetto la rotazione osservata riesce a misurare: il momento torcente applicato, M = 40 Nm, la durata dell’esperimento ∆t = 10 s, la frequenza finale ν = 3
Francesco Saitta, Pordenone Febbraio 2017
91
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
Hz (l’oggetto partiva da fermo) Quale sarà la sua conclusione sul momento d’inerzia dell’oggetto?
[I = 21 kg m2 /s2 ]
10. Una sbarra omogenea di lunghezza l = 2 m e massa m = 800 g si trova appesa in posizione verticale. Un ragazzo inizia a farla ruotare attorno al punto in cui è appesa applicando un momento
torcente costante M = 40 Nm per un tempo t = 2 s. Quale sarà la velocità angolare raggiunta
dalla sbarra?
[ω = 75 rad/s]
11. Un disco di ghiaccio omogeneo (r = 20 cm, m = 200 g) sta ruotando ad una velocità angolare
ωi = 10 rad/s. Per effetto degli attriti il disco inizia a sciogliersi e perdere massa. Supponendo
che sciogliendosi sia sempre approssimabile ad un disco omogeneo dello stesso raggio, si calcoli
la massa del disco quando il disco raddoppia la sua velocità angolare.
[m = 100 g]
12. Un tuffatore per aumentare la sua velocità angolare e riuscire a fare il tuffo previsto dal suo numero si piega su se stesso dimezzando la distanza massima del suo corpo da centro di rotazione.
Se la sua massima velocità angolare raggiunta prima di piegarsi è ω1 = 2 rad/s, quale sarà la
sua velocità angolare dopo il piegamento?
[ωf = 8 rad/s]
13. Un giocoliere sta facendo ruotare sopra la sua testa una pallina legata all’estremità di una corda
lunga l = 80 cm, di massa m = 500 g e raggio trascurabile, alla frequenza ν = 20 Hz. Per
aumentare la velocità angolare della pallina fino a ωf = 200 rad/s senza applicare momento
torcente cosa deve fare?
[ridurre la lunghezza della corda fino ad un valore lf = 63 cm]
14. Una freccetta di massa m = 25 g che si muove con la velocità vf = 50 m/s si conficca tangenzialmente sul bordo di un disco fermo di massa M = 500 g e raggio R = 20 cm. Si trovi la velocità
angolare finale del sistema disco/freccetta.
[ωf = 22, 7 rad/s]
15. Un cilindro vuoto di massa m = 500 g sta ruotando attorno al suo asse con una velocità angolare
ωi = 10 rad/s. Il cilindro viene riempito di un certo materiale ad un ritmo di 20 grammi al secondo. Dopo quanto tempo la velocità angolare raggiungerà il valore ωf = 3 rad/s? Si supponga
che l’operazione di riempimento del cilindro avvenga senza imprimere un momento torcente al
sistema.
[t = 58 s]
16. Si risolva l’esercizio (14) nel caso in cui il disco non sia inizialmente fermo ma stia ruotando, con
verso concorde alla velocità della freccetta, con una velocità angolare ωi = 0, 5 rad/s.
[ωf = 0, 52 rad/s]
Francesco Saitta, Pordenone Febbraio 2017
92
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
17. Si risolva l’esercizio (14) nel caso in cui il disco non sia inizialmente fermo ma stia ruotando, con
verso opposto alla velocità della freccetta, con una velocità angolare ωi = 0, 5 rad/s.
[ωf = 0, 47 rad/s]
18. La figura (18) mostra dall’alto una palla di pongo (m = 200 g) che sta per colpire una porta
inizialmente ferma (di lunghezza totale L = 50 cm e massa M = 5 kg). Nell’ipotesi che la palla
resti attaccata alla porta dopo l’urto, si calcoli la velocità angolare finale del sistema palla/porta.
Figura 4.7: .
[ωf = 4, 6 rad/s]
19. Come cambia in percentuale la velocità angolare di un tagadà (M = 2000 kg) se le 10 persone
(m = 60 kg) a bordo si spostano dal bordo (R = 3 m) al centro della giostra?
[aumenta del 60%]
20. Un cilindro di massa M = 1 kg e e volume V = 5 l sta ruotando attorno al suo asse pieno di
una massa m = 2 kg d’acqua ad una velocità angolare ω = 3 rad/s. Ad un certo punto si apre
un foro sul fondo del cilindro e l’acqua inizia ad uscire al ritmo di r = 0, 2 kg/s. Quale sarà la
velocità angolare ω1 del cilindro dopo un tempo t = 5 s? Quale sarà la velocità angolare ω2 del
cilindro quando tutta l’acqua è fuoriuscita dal foro?
[ω1 = 4, 5 rad/s; ω2 = 9 rad/s]
Francesco Saitta, Pordenone Febbraio 2017
93
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
21. Quanto lavoro fa il motore di un’auto di momento d’inerzia I = 1500 kgm2 che fornisce una
coppia M = 200 Nm per 12 secondi?
[L = 1920 J]
22. Quanto lavoro fa il motore di un’auto di momento d’inerzia I = 1500 kgm2 che fornisce una
coppia M = 200 Nm per raggiungere la velocità angolare finale ωf = 5 rad/s?
[L = 18750 J]
23. Su un volano di momento d’inerzia I = 200 kgm2 agisce una coppia di forze costante che fa
un lavoro L = 300000 J. Qual è la frequenza iniziale νi del volano se la frequenza raggiunta è
νf = 50 Hz?
[νi = 49, 2 Hz]
24. Quanto lavoro devono fare gli attriti per fermare la rotazione di un cilindro di massa M = 30
kg e raggio R = 50 cm che ruota attorno al suo asse con velocità angolare ω = 1, 5 rad/s?
[L = 8, 4 J]
25. Una pallina sferica di massa m = 200 g e raggio r = 20 cm viene lanciata in orizzontale compiendo un lavoro L = 1900 J. Supponendo che non ci siano attriti qual è la sua velocità angolare,
prima che l’effetto della gravità diventi non trascurabile, se la sua velocità è v = 100 m/s?
[ω = 750 rad/s]
26. Si calcoli l’energia totale di un asta sottile (M = 200 kg, l = 30 cm) che sta ruotando alla
frequenza ν = 50 Hz attorno ad uno dei suoi estremi senza traslare.
[E = 296 kJ]
27. Si calcoli l’energia totale di un cilindro (M = 2 kg, R = 20 cm) che, facendo un moto di puro
rotolamento, percorre 3 metri in 2 secondi.
[E = 3, 4 J]
28. Si risolva il problema (30) nel caso in cui a muoversi sia una sfera della stessa massa e dello
stesso raggio del cilindro. Si commenti il risultato.
[E = 3, 2 J]
29. Si calcoli la variazione di energia nel processo fisico descritto dal problema (18).
[∆E = −59, 3 J]
30. Un cilindro (M = 5 kg, R = 30 cm) viene lasciato scivolare lungo un piano inclinato (α = π/6
rad) da un’altezza h = 3 m. Quale sarà la sua velocità angolare nel momento in cui raggiunge
il fondo del piano inclinato? Si supponga un moto di rotolamento puro per il cilindro.
[ω = 21 rad/s]
Francesco Saitta, Pordenone Febbraio 2017
94
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
31. Si risolva il problema (30) nel caso in cui a cadere sia una sfera della stessa massa e dello stesso
raggio del cilindro. Si commenti il risultato.
[ω = 22 rad/s]
32. Un’asta sottile omogenea di massa m = 2 kg e lunga l = 1, 2 m si trova in posizione verticale
quando viene leggermente spostata dalla posizione di equilibrio instabile in cui si trovava. Si
calcoli la velocità del suo punto estremo (il più alto nel momento in cui si trova in posizione
di equilibrio) un attimo prima di toccare terra. Come cambia il risultato se la massa dell’asta
dovesse raddoppiare?
[v = 3 m/s; il risultato non dipende dalla massa dell’asta]
33. Quanto lavoro devono fare le forze d’attrito per fermare un disco di massa m = 10 kg che sta
rotolando con un moto di puro rotolamento di velocità vcm = 15 m/s?
[L = 1687, 5 J]
34. Qual è la massima altezza raggiunta da un’asta sottile di massa m = 200 g e lunghezza l = 30
cm lanciata verso l’alto con velocità vcm = 5 m/s e frequenza di rotazione attorno al suo centro
di massa ν = 3 Hz, nell’ipotesi che non agiscano attriti sul sistema e che nel punto più alto l’asta
non ruoti.
[h = 1, 4 m]
35. Un giocatore di golf colpisce la pallina con una forza media Fm = 200 N per un intervallo di
tempo ∆t = 20 ms. Calcola la massima altezza raggiunta dalla pallina se la pallina può essere
approssimata con una sfera di raggio r = 5 cm e massa m = 100 g, la velocità iniziale della
pallina forma un angolo α = 60◦ con l’orizzontale e la velocità angolare sia data nell’ipotesi
che la pallina qualche istante dopo il lancio inizi a ruotare con una velocità angolare come se la
pallina facesse un moto di puro rotolamento in aria senza variare la velocità del centro di massa
e lo mantenga poi costante.
[h = 28, 6 m]
36. Find the angular momentum of the moon in its revolution around the earth.
[L = 2, 9 × 1034 kg m2 /s]
37. Find the angular momentum of the moon in its rotation. Approximates the moon to a sphere
rotating around its diameter.
[L = 2, 9 × 1024 kg m2 /s]
38. Find the mass of a wheel (R = 40 cm) that is accelerating from ω1 = 0 rad/s to ω2 = 5 rad/s in
25 seconds under the action of a torque M = 20 Nm.
[m = 1250 kg]
39. Find the total mechanical energy of the earth in its revolution around the sun and in its rotation
around its diameter.
Francesco Saitta, Pordenone Febbraio 2017
95
CAPITOLO 4. MOMENTO ANGOLARE E MOTO ROTATORIO
[ET = 1, 5 × 1053 J]
40. A rope is wrapped around a cylinder (M = 125 kg, R = 50 cm), with a fixed frictionless axis.
The other end of the rope is tied to a block (M = 10 kg). What is the angular acceleration ac
of the cylinder? What is the linear acceleration ab of the block? Assume that the rope does not
slip on the cylinder.
[ac = 2, 7 rad/s2 , ab = 1, 4 m/s2 ]
Francesco Saitta, Pordenone Febbraio 2017
96
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
Capitolo
5
Gravitazione universale
Nel 1687, nel suo libro Philosophiae Naturalis Principia Mathematica, lo stesso in cui enunciò le tre
leggi della dinamica, Newton enunciò la legge di gravitazione universale. Parlando di forza gravitazionale e legge di gravitazione universale non possiamo non accennare al ruolo che ebbe questa legge
nella storia della fisica e nell’evoluzione dalla cosmologia aristotelica alla cosmologia moderna.
La legge di Newton si pone come la formalizzazione matematica della rivoluzione Copernicana, i
cui protagonisti furono tra gli altri Copernico (Toruń, 1473 - Frombork, 1543), Ticho Brahe (Castello
di Knutstorp, 1546 - Praga, 1601), Keplero (Weil der Stadt, 1571 - Ratisbona, 1630), Galileo e Newton, che sostituı̀ alla visione di Aristotele (Stagira, 384-83 a.C. - Calcide, 322 a.C) e Tolomeo (Pelusio,
100 - 175) di un universo geocentrico la visione moderna di un universo in cui la terra non è altro
che un pianeta di una stella come molte altre, il sole. La teoria Newtoniana fu considerata la corretta
descrizione dell’universo per più di 200 anni, quando Einstein formulò la relatività ristretta prima,
nel 1905, e la relatività generale poi, nel 1916, teorie che misero le basi per una nuova concezione
dell’universo e la cosmologia come studiata al giorno d’oggi.
Anche per il nostro corso questa teoria riveste un’importanza particolare: rappresenta infatti la prima
teoria fisica, come intesa da metodo sperimentale studiato al primo anno, che affrontiamo; per la
prima volta metteremo assieme le nozioni di cinematica e dinamica studiate fin qui per descrivere un
fenomeno naturale di primissima importanza nell’universo come la gravitazione. Prima di entrare nei
dettagli della teoria di Newton è doveroso ed importante fare qualche accenno ai pensatori già citati
che contribuirono alla formalizzazione di questa teoria.
5.1
Le leggi di Keplero
Keplero analizzo ed interpretò i dati raccolti da Tycho Brahe in due libri nei quali sono contenute
le famose tre leggi di Keplero (Kepler, 1609, 1619). Queste leggi nate da un’attentissima analisi di
una mole enorme di dati e rilette con la convinzione che l’universo debba rispondere ad un’esigenza
di armonia dei corpi celesti sono state tra le premesse fondamentali per la teoria Newtoniana della
gravitazione, come vedremo in seguito.
5.1.1
La prima legge di Keplero
La prima legge di Keplero asserisce che, come descritto dalla figura (5.1) ogni pianeta del sistema
solare compie un’orbita ellittica in cui il sole è uno dei due fuochi.
Francesco Saitta, Pordenone Febbraio 2017
97
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
Figura 5.1: Prima legge di Keplero: S è il sole, P uno qualsiasi dei suoi pianeti.
Pianeta
Eccentricità dell’orbita
Mercurio
Venere
Terra
Marte
Giove
Saturno
Urano
Nettuno
0,205
0,007
0,017
0,094
0,049
0,057
0,046
0,011
Tabella 5.1: Eccentricità delle orbite ellittiche dei pianeti del sistema solare; fonte dei dati
NASA/NSSDC http://nssdc.gsfc.nasa.gov/planetary/factsheet/
5.1.2
La seconda legge di Keplero
Le seconda legge di Keplero asserisce che ogni pianeta del sistema solare nella sua orbita spazza aree
uguali in tempi uguali. Come illustrato anche in figura (5.2) questa legge ha diretta conseguenza sulle
velocità dei pianeti nelle diverse parti dell’orbita: essi avranno velocità minore nelle aree più lontane
dal sole, velocità maggiori nelle aree più vicine ad esso; il punto di velocità massima, quello dell’orbita
più vicino al sole si chiama perielio, quello di velocità minima e massima distanza dal sole afelio
Francesco Saitta, Pordenone Febbraio 2017
98
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
Figura 5.2: Seconda legge di Keplero: S è il sole, P uno qualsiasi dei suoi pianeti.
5.1.3
La terza legge di Keplero
La terza legge di Keplero asserisce che per ogni pianeta del sistema solare resta costante il rapporto
tra il quadrato del suo periodo di rotazione attorno al sole e il cubo del semiasse maggiore dell’orbita:
T2
=k
a3
5.2
La legge di gravitazione universale
Riportiamo qui una giustificazione matematica della legge che Newton propose come sintesi di tutte
le osservazioni ed i ragionamenti fatti dagli scienziati vissuti dalla metà del 1400 in poi: cercheremo di
comprendere il motivo della forma che la forza gravitazionale assume. Il grande merito di Newton fu
quello di riuscire a dimostrare matematicamente quello che alcuni astronomi avevano intuito, assieme
al coraggio di ipotizzare che il tipo di forza che fa cadere un oggetto da un tavolo sulla terra sia la
stessa che fa ruotare la luna attorno al nostro pianeta o un pianeta attorno alla sua stella: la legge
di gravitazione universale che segue è l’esempio di una delle generalizzazioni fisico-matematiche più
importanti della storia della scienza.
Dalla tabella (5.1.1) possiamo notare come le eccentricità dei pianeti del sistema solare siano tutte molto piccole: possiamo quindi pensare che l’approssimazione delle orbite ellittiche dei pianeti con
orbite circolari possa essere una buona approssimazione. L’ipotesi fatta ci aiuta dal punto di vista matematico nel trovare l’espressione della forza di gravitazione universale, ma non ne modifica la forma;
ragioneremo in seguito sulla forma delle traiettorie di corpi sotto l’effetto della forza gravitazionale.
Faremo quindi riferimento alla figura (5.3) per i calcoli che seguono.
La forza che il sole applica sul pianeta, per la seconda legge di Newton deve essere uguale alla massa
del pianeta mP moltiplicata per la sua accelerazione:
F~SP = mP ~aP
Francesco Saitta, Pordenone Febbraio 2017
99
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
Figura 5.3: S è il sole mentre P uno qualunque dei pianeti del suo sistema, nell’approssimazione di
orbita circolare. F~SP è la forza che il sole applica sul pianeta, mentre F~P S è la forza che il pianeta
applica sul sole.
Ipotizzando il moto del pianeta circolare uniforme di raggio R e periodo T 1 si ha aP = vP2 /R =
4π 2 R/T 2 , che porta ad una forza di attrazione centripeta
FSP = mp
4π 2 R
.
T2
(5.2.1)
Fino a questo punto la dinamica descritta non ha nulla a che vedere con la gravitazione od il sistema
solare, è semplicemente la dinamica di un corpo che si muove di moto circolare uniforme; inserendo
però nell’equazione (5.2.1) la terza legge di Keplero (5.1.3) si ottiene
FSP =
4π 2 mP
,
kS R2
(5.2.2)
dove kS è la costante che caratterizza tutti i pianeti che ruotano attorno al sole. Notiamo che la
forza con cui il sole attrae un pianeta è direttamente proporzionale alla massa del pianeta stesso ed
inversamente proporzionale al quadrato della distanza tra pianeta e sole. L’equazione (5.2.2) è dunque
valida come legge di gravitazione per tutti i pianeti che compiono un moto di rivoluzione attorno alla
stella che chiamiamo sole; l’idea che evidenziò tutta la genialità di Newton fu quella di ipotizzare
che la natura di questa forza fosse la stessa per tutte le masse, ovvero ipotizzare che prese comunque
due masse m1 ed m2 esse si attraggano con una forza diretta lungo la congiungente le due masse con
un’intensità direttamente proporzionale alle masse ed inversamente proporzionale al quadrato della
loro distanza.
Per capire come può essere fatta questa forza torniamo alla descrizione del sistema sole-pianeta: se
1
Nella nostra esperienza possiamo dire che la terra compie un giro attorno al sole sempre nello stesso tempo, che
definiamo essere un anno solare.
Francesco Saitta, Pordenone Febbraio 2017
100
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
il sole applica una forza F~SP sul pianeta, significa che per il terzo principio della dinamica il pianeta
deve applicare sul sole una forza uguale e contraria F~SP = −F~P S . Se immaginiamo di descrivere il
sistema da un riferimento solidale con il pianeta possiamo immaginare che la forza di cui risente il sole
sia del tipo
4π 2 mS
FP S =
,
(5.2.3)
kP R2
dove kP ora è la costante della terza legge di Keplero per un sistema che ruota attorno al pianeta P .
Già in questo ragionamento vediamo la generalizzazione che necessaria per poter costruire una teoria
universale della gravitazione, le leggi di Keplero sono leggi osservative valide in linea di principio
solamente per il sistema in cui i pianeti ruotano attorno al sole, noi stiamo immaginando che siano
valide per qualsiasi sistema gravitazionale. Vale dunque:
F~SP
mS
kP R 2
mS
kP
mS kS
4π 2
= −F~P S
4π 2 mP
=
kS R2
mP
=
kS
= mP kP
possiamo quindi definire una costante più generale k = mS kS = mP kP da poter inserire nelle formule
(5.2.2) e (5.2.3), ottenendo:
FSP
=
FP S =
4π 2 mS mP
k
R2
2
4π mS mP
.
k
R2
L’intuizione di Newton fu quella di assumere 4π 2 /k come costante universale, la costante di gravitazione universale G e dire che due masse qualsiasi m1 ed m2 si attraggono con una forza del
tipo:
m1 m2
F~ = G 2 r̂
(5.2.4)
r
La costante di gravitazione universale fu calcolata per la prima volta da Henry Cavendish (Nizza,
1731 - Londra, 1810) con l’utilizzo di una bilancia a torsione (Cavendish, 1798), ed al giorno d’oggi si
assume essere
Nm2
(5.2.5)
G = 6, 67 · 10−11 2
kg
5.3
Il concetto di campo
Parlando di forza gravitazionale ci troviamo per la prima volta di fronte al concetto di campo in fisica.
Questo concetto è di fondamentale importanza per il ruolo che ha nell’impostazione di tutta la fisica
moderna, e per questo cercheremo di darne una semplice spiegazione in queste righe. Il concetto di
campo nasce in fisica per dare una spiegazione plausibile ad un fatto provato ma di difficile spiegazione:
esistono delle forze a distanza, ovvero che agiscono senza bisogno di contatto, di un mediatore che
faccia imprimere la forza da un corpo ad un altro. Una forza di contatto è semplice da comprendere:
studiando il fenomeno del calcio di punizione di un calciatore ad esempio, è facile capire come il
giocatore riesca ad imprimere una certa forza sul pallone: colpendola tramite il piede e lo scarpino!
Ma se lasciamo cadere una penna dalla mano, come fa la terra a ”comunicare” alla penna di dirigersi
Francesco Saitta, Pordenone Febbraio 2017
101
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
verso il centro della terra con una ben definita accelerazione ~g ? Nella storia della scienza, fino agli studi
di Newton sulla gravitazione, tutti gli scienziati ed i filosofi erano fermamente convinti che una forza
dovesse necessariamente essere forza di contatto; con la formalizzazione della legge di gravitazione
universale invece si ebbe la prima teorizzazione di una forza a distanza: questo fatto fu difficilmente
digerito dalla comunità scientifica e trovò completa soluzione solo con la formalizzazione del concetto
di campo di forza dopo gli studi sull’elettromagnetismo alla fine del XIX secolo. Per capire di che
cosa si tratta torniamo all’esempio precedente: come fa la penna a ”sapere” come muoversi verso
la terra? L’idea fondamentale è che la terra, per il solo fatto di esistere, modifica lo spazio nel suo
intorno, in modo da far percepire a tutte le masse circostanti la sua presenza; in che modo? Tramite il
campo gravitazionale. La modifica dello spazio da parte di una massa può essere descritta dalla figura
(5.4). Modificando lo spazio intorno a se di fatto la massa sta lasciando delle informazioni sul tipo di
Figura 5.4: Nella figura è raffigurato in basso lo spazio senza masse: un piano, un’infinita distesa
piatta; immaginando di posizionarsi in questa distesa tutti i punti sono equivalenti: non vi è differenza
alcuna nel posizionarsi in uno qualsiasi dei punti del piano. Nella figura in alto invece è raffigurato
lo spazio modificato da una massa; non c’è più un piano, lo spazio non è più uguale a se stesso in
ogni punto: posizionarsi in un punto non equivale a posizionarsi in un qualsiasi altro, la massa ha
modificato lo spazio intorno a sé!
forza (per questo campo di forze) di cui risentirà un’altra massa nel caso in cui dovesse posizionarsi
in una certa posizione: F~ = m~g , dove F~ è la forza, m la massa “di prova” (l’ipotetica massa che si
trova nelle vicinanze della massa “sorgente”, che genera il campo) e ~g il campo. In questo modo è
facile capire come si risolve, per lo meno da un punto di vista concettuale, il problema della forza a
distanza: il “mediatore” della forza, ciò che permette alla forza di essere impressa da un corpo ad
un altro, è il campo stesso. Il campo è dunque un vettore che in ogni punto dello spazio circostante
la sorgente dà l’informazione sul tipo di forza (modulo, direzione e verso) di cui risentirà una massa
collocandosi in quel punto dello spazio. Ogni qual volta ci si trova in presenza di una forza a distanza
si definisce il relativo campo che funziona sempre nello stesso modo, dando l’informazione di forza ad
ogni punto dello spazio, come descritto in figura(5.5); ciò che cambia da caso a caso sono le sorgenti
della forza: nel caso gravitazionale sono le masse, nel caso elettrico (che non abbiamo ancora studiato)
sono le cariche, e cosı̀ via. Dal punto di vista matematico un campo di forze è una funzione che
associa ad un vettore tridimensionale (la posizione nello spazio (x,y,z)) un vettore tridimensionale (il
campo stesso). Abbiamo definito un campo di forze, in quanto si tratta in fisica di una quantità di
Francesco Saitta, Pordenone Febbraio 2017
102
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
~ è indicato un campo generico, generato da una certa proprietà della materia,
Figura 5.5: Con C
identificata con p (massa, carica,...). La figura mostra l’effetto generale di un campo di forza: esso
dà l’informazione di forza per ogni corpo dotato della proprietà p. Il vettore campo dipende dal punto
dello spazio in cui si trova, per cui l’informazione è relativa alla forza di cui risentirebbe un corpo in
quel determinato punto dello spazio.
importanza molto rilevante, ma in modo analogo si possono definire campi di velocità, di accelerazione,
o di qualsiasi quantità vettoriale di interesse. Nella fisica moderna il concetto di campo assume un
ruolo fondamentale, in quanto dal punto di vista concettuale un campo di forza porta con sé tutte
le informazioni legate alla forza a prescindere dal soggetto che “subisce” la forza stessa: a differenza
della fisica classica e del percorso che abbiamo seguito, per cui prima si studia la forza e poi si ricava il
campo relativo, in fisica moderna ogni qual volta si voglia studiare un interazione se ne studia prima
il campo ed in seguito si focalizza sulla forza che esso genera.
5.3.1
Linee di campo
Spesso rappresentare un campo vettoriale può essere complesso e poco chiaro: i vettori si accavallano
e non si capisce l’andamento reale del campo. Per questo motivo si utilizza una convenzione assodata
nel tempo per rappresentare i campi di forza in fisica: le linee di campo. Le linee di campo sono
delle linee che vengono tracciate nel piano o nello spazio con lo scopo di rappresentare graficamente
l’andamento del campo. Esistono delle semplici regole per disegnarle:
1. Le linee di campo sono fatte in modo tale che il campo sia sempre tangente ad esse;
2. La densità di linee di campo è direttamente proporzionale all’intensità del campo;
3. Le linee di campo sono orientate secondo l’orientazione del campo stesso.
In figura(5.6) vediamo un chiaro esempio di linee di campo: le linee di campo gravitazionale generate
da una massa M .
Francesco Saitta, Pordenone Febbraio 2017
103
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
Figura 5.6: Linee di campo gravitazionale generate da una massa m
5.4
Il campo gravitazionale
Nel caso gravitazionale dunque, unendo la legge di gravitazione universale con la (5.5) otteniamo la
seguente espressione per il campo, che chiameremo ~g :
~g = G
m
r̂
r2
(5.4.1)
Notiamo come le unità di misura del campo gravitazionale siano N/kg ovvero m/s2 , il campo gravitazione è un’accelerazione, come possiamo dedurre anche dal confronto tra la relazione generale (5.5) e
la seconda legge della dinamica. Una delle applicazioni per noi più interessanti dell’equazione (5.4.1)
è la sua applicazione alla terra: proviamo a calcolare quanto vale il campo gravitazionale terrestre e
quanto cambia ad esempio passando dal livello del mare alla cima del monte Everest (h=8848m):
~g (r = RT ) = G
24
MT
−11 5, 97 · 10
r̂ = 9, 81r̂
r̂
=
6,
67
·
10
(6, 37 · 106 )2
RT2
~g (r = RT + h) = G
(5.4.2)
MT
5, 97 · 1024
−11
r̂
=
6,
67
·
10
r̂ = 9, 78r̂ (5.4.3)
(RT + h)2
(6, 37 · 106 + 8, 848 · 103 )2
(5.4.4)
Nel calcolo non abbiamo riportato le unità di misura per non appesantire la notazione, resta vera
l’osservazione fatta precedentemente per cui l’unità di misura del campo gravitazionale è quella di
un’accelerazione. Come possiamo notare l’affermazione che abbiamo sempre utilizzato fin’ora l’accelerazione di gravità vale 9,81 m/s2 su tutta la superficie terrestre è senz’altro una buona approssimazione
anche considerando la legge di gravitazione universale di Newton, il valore del campo varia dal livello
del mare alla cima del monte più alto della terra solamente dello 0,3%: per la maggior parte dei fenomeni naturali che osserviamo quotidianamente od esperimenti che possiamo immaginare di compiere
in un laboratorio terrestre g è considerabile costante!
Francesco Saitta, Pordenone Febbraio 2017
104
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
5.5
L’energia potenziale gravitazionale
Quando un fisico si trova di fronte ad una nuova forza una delle prime domande che sorgono nella sua
mente è: la forza che sto considerando è conservativa? Posso trovare un’espressione per la sua energia
potenziale? Vedremo in queste righe come la forza gravitazionale è una forza conservativa e daremo
l’espressione dell’energia potenziale gravitazionale. A differenza dei casi di forze studiate durante lo
scorso anno e riprese anche nel capitolo (1) la forza gravitazionale ha un’espressione matematica tale
per cui non siamo ancora i grado di affrontare la dimostrazione completa dell’espressione che scriveremo: daremo qui una giustificazione, speriamo ragionevole, del fatto che la forza gravitazione è
una forza conservativa, rimandando al momento in cui nel corso di matematica si affronterà il calcolo
integrale una più soddisfacente dimostrazione.
Immaginiamo di avere una massa m1 che genera un campo gravitazionale in cui la massa m2 si
trova immersa. La massa m2 si trova inizialmente nel punto A ed il nostro proposito è quello di darci
ragione del fatto che, volendo spostare la massa in un qualsiasi altro punto B dello spazio, il lavoro
che la forza gravitazionale compie non dipende dal percorso effettuato dalla massa m2 ; la situazione è
descritta dalla figura (5.7). Cercheremo ora di dare ragione del fatto che il percorso 1 ed il percorso 2
Figura 5.7: Tre possibili percorsi per portare la massa m2 da A e B. Il lavoro fatto dalla forza
gravitazionale per spostare la massa m2 dipende dal percorso?
della figura sono equivalenti in termini di lavoro fatto dalla forza gravitazionale, a quel punto dovremo
credere che ogni altro percorso è equivalente ad essi, anche il percorso 3, che pur sembra molto diverso... Per quanto riguarda il percorso 1 possiamo dire che la forza è sempre parallela alla traiettoria
e quindi il lavoro, come detto nel capitolo (1) parlando di forze variabili, è dato dall’area della curva
definita dalla forza dal raggio rA al raggio rB , come illustrato in figura (5.8) Ora basta notare che in
Francesco Saitta, Pordenone Febbraio 2017
105
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
Figura 5.8: Lavoro come area della funzione F (r)
un qualsiasi pezzo di traiettoria circolare con centro m1 , come la prima parte del percorso 2, la forza
è sempre perpendicolare alla traiettoria (ricordiamo che per intervalli di tempo abbastanza piccoli
possiamo confondere la corda che esprime lo spostamento con l’arco di circonferenza che esprime la
traiettoria e la tangente alla curva in quel punto): il lavoro in quel tratto di traiettoria è quindi nullo,
e nel secondo tratto è sempre dato dall’area di figura (5.8). Abbiamo cosı̀ dimostrato che il lavoro
della forza gravitazionale lungo il percorso 1 è uguale al lavoro lungo il percorso 2, ed in generale
uguale a qualsiasi percorso che preveda una combinazione di tratti circolari con centro m1 e tratti
radiali. L’atto di fiducia che richiesto ora è quello di credere che sia dimostrabile l’indipendenza del
lavoro per ogni percorso che colleghi A e B e che l’espressione che si ottiene per l’energia potenziale
gravitazionale è:
m1 m2
U = −G
(5.5.1)
r
Il lavoro dipende quindi solo dalle distanze iniziale e finale della massa m2 rispetto alla massa m1 :
L = −∆U = Ui − Uf = Gm1 m2 (
5.6
1
1
− )
rf
ri
(5.5.2)
Pianeti e satelliti
In questo paragrafo studieremo come i concetti studiati per la gravitazione universale possono essere
utilizzati per analizzare la dinamica di un sistema gravitante a due masse, la prima di massa molto
maggiore della seconda, come può essere un pianeta con uno dei suoi satelliti (naturali od artificiali)
o una stella con un suo pianeta. Affinché un satellite possa gravitare stabilmente attorno alla massa
Francesco Saitta, Pordenone Febbraio 2017
106
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
che lo attrae la forza centripeta gravitazionale F~g deve essere bilanciata dalla forza centrifuga F~c ,
come descritto dalla figura (5.9). Dal punto di vista algebrico possiamo immaginare di calcolare la
Figura 5.9: Bilanciamento delle forze in un sistema gravitazionale a due corpi nel sistema di riferimento
del corpo di massa maggiore
relazione tra la velocità e la distanza che il satellite deve avere per rimanere in equilibrio, supponendo
di conoscere la massa del corpo che genera il campo gravitazionale sul satellite stesso:
Fc = Fg
mM
mac = G 2
r
v2
mM
m
= G 2
r
r
v2
mM
m
= G 2
r
r r
GM
v =
r
Dal punto di vista energetico possiamo quindi sfruttare la relazione trovata per calcolare la relazione
tra energia totale del sistema e posizione di equilibrio del satellite:
1
mM
1 GM
mM
1 mM
Etot = mv 2 − G
= m
−G
=− G
2
r
2
r
r
2
r
5.6.1
I satelliti artificiali della terra
Grazie anche e sopratutto agli studi sulla gravitazione universale l’uomo ha potuto mettere in orbita
dei satelliti che gravitano attorno al nostro pianeta ed hanno diverse funzioni, tra le quali sopratutto
l’astronomia, la meteorologia, le telecomunicazioni e la navigazione. Il primo satellite artificiale messo
in orbita dagli uomini fu il sovietico Sputnik I nel 1957, il più famoso probabilmente è stato l’Hubble
Space Telescope messo in orbita nel 1990 da una collaborazione tra NASA2 ed ESA3 . Le equazioni viste
2
3
l’agenzia spaziale statunitense
l’agenzia spaziale europea
Francesco Saitta, Pordenone Febbraio 2017
107
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
precedentemente mettono in relazione la velocità che devono avere i satelliti con l’altezza rispetto alla
superficie terrestre (h = r − RT ) in cui devono essere posizionati per essere in equilibrio. Particolare
importanza al giorno d’oggi rivestono due tipi di satelliti:
• Geostazionari:
si definiscono in questo modo satelliti che hanno un’orbita circolare posta sul piano definito
dall’equatore, con periodo di rivoluzione uguale al periodo di rotazione della terra in modo tale
da apparire in posizione fissa da un osservatore solidale con il sistema terrestre. Per avere tale
periodo essi devono essere ad un distanza dalla superficie terrestre pari ad h = 35863km:
r
r
r
2
2
GM
2πr
3 GM Trot
3 GM Trot
v=
=⇒ r =
=⇒
h
=
− RT
∧v =
r
Trot
4π 2
4π 2
• Polari:
si definiscono in questo modo satelliti che hanno un’orbita che attraversa i poli; sono studiati in
modo da sorvolare sempre aree differenti sotto di sé, acquisendo immagini o video della parte
di pianeta sotto di sé. Essi si trovano tipicamente ad altezze non molto elevate, attorno ai 1000
km di altitudine rispetto al livello del mare.
5.7
Traiettorie ed energia
Abbiamo già notato come l’energia totale di un sistema gravitante a due corpi pianeta-satellite ha
energia totale negativa: in questo paragrafo studieremo la relazione esistente tra energia di un sistema
gravitante a due corpi e traiettoria dei corpi del sistema. Per semplicità considereremo sempre uno dei
due corpi molti più massiccio del secondo, in modo da poter considerare inerziale un sistema solidale
con esso. Immaginiamo per esempio di lanciare un oggetto di massa m dalla superficie terrestre.
Il sistema considerato è conservativo, ci è conveniente quindi avere la descrizione dell’energetica del
sistema stesso: esso ha energia potenziale
Ug = −G
mM
RT
(con M la massa ed RT il raggio del pianeta terra) ed un energia cinetica
1
Ec = mv 2
2
, con v la velocità iniziale della massa lanciata. La quantità totale di energia del sistema è dunque
1
mM
Etot = mv 2 − G
2
RT
, composta evidentemente dalla differenza di due quantità positive. Siamo dunque di fronte a tre
possibilità:
• Etot > 0:
in questo caso man mano che la massa si muove allontanandosi dalla terra sia la sua energia
cinetica che l’energia potenziale del sistema si avvicinano a zero; per la conservazione dell’energia
esisterà un momento in cui l’energia potenziale si annullerà e al corpo resterà solamente energia
cinetica: esso dunque sarà libero dall’influenza gravitazionale terrestre e si potrà muovere nello
spazio. Chiameremo un sistema di questo genere aperto.
Francesco Saitta, Pordenone Febbraio 2017
108
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
• Etot < 0:
in questo caso invece esisterà un momento in cui l’energia cinetica si esaurirà con una certa
quota di energia potenziale: il corpo ricadrà dunque verso la superficie terrestre. Chiameremo
un sistema di questo genere legato.
• Etot = 0:
il caso limite definisce la cosiddetta velocità di fuga, la minima velocità che deve avere il corpo
per liberarsi dall’influenza gravitazionale
p terrestre (o del pianeta in cui si trova). Imponendo
l’equazione Etot = 0 si trova vf uga = 2GM/RT = 11200m/s.
In generale diremo che un sistema gravitazionale con energia totale negativa è un sistema legato, i
cui elementi cioè continueranno a gravitare gli uni attorno agli altri ed in generale sono attratti gli uni
dagli altri, mentre un sistema con energia totale positiva è un sistema i cui elementi tenderanno ad
allontanarsi gli uni rispetto agli altri. Questa regola che non abbiamo giustificato matematicamente in
generale può essere considerata valida per tutte le forze la cui energia potenziale si annulla quando la
distanza tra i corpi che risentono della forza tende ad essere molto grande: sistemi con energia totale
negativa sono in generale sistemi attrattivi e sistemi con energia totale positiva sono in generale sistemi
repulsivi. Proseguendo con il corso di fisica vedremo l’applicazione di questa regola anche studiando
l’elettrostatica.
É interessante a questo punto far notare come da un punto di vista matematico le diverse possibili
orbite di un sistema gravitazionale siano tutte curve coniche, che come sappiamo furono introdotte
dal matematico greco Apollonio tra il terzo ed il secondo secolo avanti Cristo. Lo studio delle coniche
dopo le analisi degli studiosi greci fu sostanzialmente abbandonato per più di un millennio quando
Keplero ebbe l’intuizione e fece lo sforzo di analizzarle come possibili curve con cui interpretare i
dati ereditati da Brahe. Keplero compı̀ moltissimi studi matematici sulla natura delle coniche e le
loro eccentricità e riuscı̀ ad affermare la sua prima legge, in seguito la formalizzazione della dinamica
di sistemi gravitazionali dimostrò come il campo gravitazionale generi in modo naturale traiettorie
coniche a seconda delle caratteristiche di partenza del sistema.
Francesco Saitta, Pordenone Febbraio 2017
109
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
5.8
Esercizi
1. Si calcoli la forza con cui la terra è attratta dal sole.
[F = 3, 3 × 1022 N]
2. Si calcoli la forza con cui la luna è attratta dalla terra.
[F = 1, 97 × 1020 N]
3. Qual è la forza di attrazione gravitazionale tra due persone di massa m = 80 kg alla distanza di
un metro l’una dall’altra?
[F = 4, 3 × 10−7 N]
4. Due masse m1 = 10 kg ed m= 25 kg sono poste ad una distanza d = 5 m l’una dall’altra. Dove
deve posizionarsi una massa m3 = 10 g per essere in equilibrio?
[sulla congiungente le masse m1 ed m2 ad una distanza d = 193 cm da m1 ]
5. Tre masse mA = 20 kg, mB = 20 kg ed mC = 5 g sono poste sui vertici di un triangolo equilatero ABC di lato l = 2 m. Si calcoli la forza che agisce sulla massa mC posta sul vertice C del
triangolo.
[F = 2, 8 × 10−12 N, diretta perpendicolarmente al lato AB del triangolo con verso tale che
la massa sia attratta verso AB]
6. Tre masse mA = 20 kg, mB = 10 kg ed mC = 5 g sono poste sui vertici di un triangolo equilatero ABC di lato l = 2 m. Si calcoli la forza che agisce sulla massa mC posta sul vertice C del
triangolo.
[F = 2, 2 × 10−12 N, formante un angolo α = 259◦ rispetto la base AB]
7. Tre masse mA = 25 kg, mB = 25 kg ed mC = 25 g sono poste sui vertici di un triangolo isoscele
rettangolo ABC di cateti AC = BC = 2 m. Si calcoli la forza che agisce sulla massa mC posta
sul vertice C del triangolo.
[F = 1, 5 × 10−11 N, diretta lungo la bisettrice dell’angolo AĈB]
8. Tre masse mA = 5 kg, mB = 15 kg ed mC = 25 kg sono allineate con AC = 20 cm, CB = 45
cm e AB = 25 cm. Si calcoli la forza che agisce sulla massa mC .
[F = 3, 3 × 10−7 N, diretta verso A]
9. Quattro masse mA = 20 kg, mB = 25 kg, mC = 20 kg ed mD = 20 g sono poste sui vertici di
un quadrato ABCD di lato l = 30 cm. Si calcoli la forza che agisce sulla massa mD .
[F = 6 × 10−10 N, diretta lungo la diagonale del quadrato verso B]
10. Si calcoli il peso misurato con un dinamometro di un uomo di massa m = 70 kg che si trovi su
una mongolfiera ad un’altezza h = 11 km sul livello del mare. Se si pesasse con una bilancia, di
Francesco Saitta, Pordenone Febbraio 2017
110
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
quanto crederebbe di essere dimagrito?
[P = 676 N, crederebbe di avere perso m = 1 kg]
11. A che altezza si trova un uomo di massa m = 90 kg che pesandosi ha come risposta dalla bilancia
m = 85 kg?
[h = 150 km]
12. Si trovi il campo gravitazione generato da una massa m = 1000 kg ad una distanza r = 50 m.
Di quale forza gravitazionale risentirebbe un uomo di massa mP = 80 kg se si trovasse ad una
distanza r dalla massa m?
[g = 2, 7 × 10−11 m/s2 , F = 2, 1 × 10−9 N]
13. Si trovi il campo gravitazionale generato dalla terra ad una distanza h = 12000 km da terra.
[g = 2, 7 m/s2 ]
14. A che distanza dalla superficie terrestre il campo gravitazionale generato dal nostro pianeta si
dimezza?
[h = 2600 km]
15. Qual è il valore del campo gravitazionale lunare sulla superficie terrestre?
[g = 3, 3 × 10−5 m/s2 ]
16. Qual è il valore del campo gravitazionale solare sulla superficie terrestre?
[g = 5, 6 × 10−3 m/s2 ]
17. Si trovi il valore del campo gravitazionale generato da un anello sottile uniforme di massa m = 40
kg e raggio r = 30cm nel suo centro.
[g = 0 m/s2 ]
18. Quale massa genera un campo gravitazione di intensità g = 9, 8 m/s2 ad una distanza di 5 metri?
[m = 3, 7 × 1012 kg]
19. Tre masse mA = 20 kg, mB = 20 kg ed mC = 20 kg sono poste sui vertici di un triangolo
equilatero ABC di lato l = 2 m. Si calcoli il campo gravitazionale generato dalle tre masse sul
punto medio del lato AB.
[g = 4, 4 × 10−10 m/s2 diretto in verticale verso il vertice C]
20. Quattro masse mA = 40 kg, mB = 40 kg, mC = 20 kg ed mD = 20 kg sono poste sui vertici
di un quadrato ABCD di lato l = 30 cm. Si calcoli il campo gravitazionale al centro del quadrato.
[g = 4, 2 × 10−8 m/s2 diretto perpendicolarmente e verso il lato AB]
Francesco Saitta, Pordenone Febbraio 2017
111
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
21. Si calcoli il lavoro necessario per costruire un triangolo equilatero di lato 50 cm con tre masse
uguali m = 10 kg.
[L = 4 × 10−8 J, fatto dalla forza gravitazionale]
22. Si calcoli il lavoro necessario per costruire un quadrato di lato 20 cm con quattro masse uguali
m = 20 kg.
[L = 7, 2 × 10−7 J, fatto dalla forza gravitazionale]
23. Tre masse mA = 20 kg, mB = 25 kg ed mC = 10 kg sono poste sui vertici di un triangolo
equilatero ABC di lato l = 1, 5 m. Qual è il lavoro che il campo gravitazionale fa o subisce per
portare le masse su un triangolo equilatero come il primo, ma di lato l = 20 cm?
[L = 2, 8 × 10−7 J, fatto dalla forza gravitazionale]
24. Quattro masse mA = 10 kg, mB = 40 kg, mC = 20 kg ed mD = 15 kg sono poste sui vertici di
un quadrato ABCD di lato l = 50 cm. Qual è il lavoro che il campo gravitazionale fa o subisce
per portare le masse in linea nell’ordine ABCD con AB = BC = CD = 20 cm?
[L = 3, 5 × 10−7 J, fatto dalla forza gravitazionale]
25. Quanto lavoro hanno fatto i motori di un astronave (m = 50000 kg) partita dalla superficie
terrestre quando questa raggiunge quota h = 20000 km?
[L = 23, 7 × 1011 J]
26. A quale altezza dalla superficie terrestre si trova un satellite che ruota attorno al nostro pianeta
con un periodo T = 10 giorni?
[h = 1, 9 × 108 m]
27. A quale velocità si muove un satellite che orbita attorno alla terra ad una quota h = 50000 km
sul livello del mare?
[v = 2642 m/s]
28. Un satellite in orbita attorno alla terra alla velocità v = 200 m/s misura un peso P = 50 N per
una massa m = 50 kg. Il satellite è in equilibrio su un’orbita stabile?
[No, perché...]
29. Dalla cima di un grattacelo alto h = 200 m un tizio vuole lanciare una pallina in modo che
riesca ad entrare in orbita all’altezza da cui è stata lanciata. A quale velocità dovrebbe lanciare
la pallina, supponendo un lancio a velocità iniziale orizzontale, per riuscire nel suo intento?
[v = 7860 m/s]
30. A che altezza arriverebbe un corpo di massa m = 100 kg lanciato dalla superficie terrestre con
velocità pari ad un terzo della velocità di fuga? E se il corpo avesse massa m = 20 kg?
[h = 796 km, indipendentemente dalla massa del corpo]
Francesco Saitta, Pordenone Febbraio 2017
112
CAPITOLO 5. GRAVITAZIONE UNIVERSALE
31. A che altezza si trova un satellite di massa m = 500 kg in orbita attorno alla terra, se il sistema
terra-satellite ha energia totale E = −0, 1 J?
[h = 9, 8 × 1017 m]
32. Con che velocità si deve lanciare verso l’alto un oggetto di massa m = 250 g dalla superficie
terrestre affinché raggiunga l’altezza massima h = 10 km?
[v = 440 m/s]
33. Qual è l’energia del sistema terra-satellite geostazionario se il satellite ha massa m = 4500 kg?
[E = −2 × 1010 J]
34. Qual è la velocità di fuga di un oggetto di massa m = 100 kg che viene lanciato da una piattaforma che si trova ad una quota h = 200 km dalla superficie terrestre?
[v = 10900 m/s]
35. Con quale velocità si deve lanciare un oggetto di massa m = 100 kg verso la luna affinché il
corpo arrivi sulla superficie lunare con velocità nulla? Si supponga che il moto dell’oggetto sia
rettilineo e senza attrito.
[v = 11119 m/s]
36. Find the gravitational field of Saturn on the planet’s surface.
[g = 10, 3 m/s2 ]
37. Find the potential gravitational energy of the system earth-moon.
[U = −7, 8 × 1020 J]
38. A satellite is gravitating around the earth at a velocity v = 50 km/h. What is its heigh with
respect to the earth surface?
[h = 2 × 1012 m]
39. Two masses m1 = 40 kg and m2 = 20 kg are fixed at a distance d = 4 m. What is the gravitational strength acting on a third mass m3 = 1 kg positioned in the middle of the line defined by
m1 and m2 ?
[F = 3, 3 × 10−10 N towards m1 ]
40. Find the gravitational strenght due to the sun acting on the farest planet (from the sun) of the
solar system.
[F = 6, 4 × 1020 N]
Francesco Saitta, Pordenone Febbraio 2017
113
CAPITOLO 6. TERMODINAMICA
Capitolo
6
Termodinamica
Come vedremo introducendo il primo principio della termodinamica in uno dei prossimi paragrafi questa parte di fisica si è sviluppata nel diciannovesimo secolo per opera di diversi scienziati dell’epoca
in relazione allo sviluppo tecnologico della rivoluzione industriale di quegli anni. Per parlare di termodinamica richiamiamo alcuni concetti visti durante il primo biennio nello studio di temperatura
e calore:
• Temperatura: grandezza fisica legata alle sensazioni di caldo e freddo, che possiamo misurare
con un termometro sulla base degli effetti di una sua variazione su corpi liquidi e solidi. La
presente definizione è una definizione operativa che necessita di un ampliamento concettuale per
comprendere davvero quale sia la natura di questa grandezza fisica con cui abbiamo quotidianamente a che fare e che troviamo cosı̀ complicato definire in modo soddisfacente. La sua unità di
misura nel sistema internazionale sono i Kelvin, la cui conversione con i gradi centigradi da noi
più utilizzati è data da T (K) = t(◦ C) + 273.15. Indicheremo sempre la temperatura misurata in
gradi centigradi con la lettera minuscola t, misurata in Kelvin con la lettera maiuscola T .
• Gas perfetto: insieme di particelle o molecole con le seguenti caratteristiche:
1. le molecole hanno dimensioni trascurabili rispetto alla media della loro distanza reciproca
e sono indistinguibili le une dalle altre: sono approssimabili a punti materiali identici;
2. le molecole sono moltissime si muovono in modo disordinato e casuale;
3. le molecole non risentono a distanza le une dalle altre (non sono soggette ad attrazioni
gravitazionali, elettriche,...): si parla di molecole non interagenti;
4. le molecole urtano solamente in modo elastico, tra loro e con le pareti del recipiente in cui
eventualmente si trovano;
• Numero di moli e numero di Avogadro: la mole è una delle sette unità di misura fondamentali ed esprime la quantità di sostanza; questa unità di misura è pratica dal punto di vista
chimico e fisico delle molecole perchè evita di lavorare con numero molto grandi (il numero di
molecole/atomi) o numeri molto piccoli (le masse molecolari/atomiche). Una mole rappresenta
la quantità di materia pari ad un numero di Avogadro di elementi (NA = 6, 022×1023 ), altrimenti definita anche come la quantità di sostanza equivalente (che contiene tante molecole/atomi)
a 12g di 12 C.
Francesco Saitta, Pordenone Febbraio 2017
115
CAPITOLO 6. TERMODINAMICA
• Parametri di stato: i parametri fisici che definiscono in modo completo la situazione macroscopica di un gas; essi sono la pressione P , il volume V , la temperatura T ed il numero di moli
n.
• Legge di Boyle: un gas perfetto che subisce una trasformazione a temperatura costante segue
la seguente legge P V = P0 V0
• Prima legge di Gay-Lussac: un gas perfetto che subisce una trasformazione a pressione costante segue la seguente legge V = V0 (1 + αt) = V0 αT , da cui si può ricavare α = 1/273, 15.
• Seconda legge di Gay-Lussac: un gas perfetto che subisce una trasformazione a volume costante segue la seguente legge P = P0 (1 + βt) = V0 βT , da cui si può ricavare β = α = 1/273, 15.
• Equazione di stato dei gas perfetti: un gas perfetto che subisce una qualsiasi trasformazione
segue la seguente legge: P V = nRT , con n il numero di moli e R ∼ 8, 31J/(mol K) la costante
universale dei gas perfetti
• Calore: grandezza fisica che determina la variazione di temperatura o il cambiamento di stato
fisico (solido, liquido, aeriforme) di un corpo. La sua unità di misura è la caloria, la quantità
di calore necessaria per far innalzare di un grado centigrado, da 14,5 a 15,5, la temperatura
di un grammo d’acqua. Ogni sostanza ha un particolare calore specifico, necessario per far
innalzare di un grado la temperatura un kilogrammo di sostanza cs = Q/(m∆T ), un calore
latente di fusione, necessario per far passare dallo stato solido a quello liquido un kilogrammo
di sostanza Qf = Q/m ed un calore latente di evaporazione, necessario per far passare dallo
stato liquido a quello aeriforme un kilogrammo di sostanza Qv = Q/m
• Equivalenza tra calore e lavoro: nel 1850 lo scienziato inglese James Prescott Joule fece il suo
famoso esperimento che abbiamo descritto nei dettagli nel corso del primo biennio dimostrando
come facendo del lavoro meccanico su una sostanza esso può essere completamente trasformato in variazione di temperatura della sostanza stessa trasferendole quindi calore. Joule calcolò
l’equivalente meccanico del calore, ovvero la conversione tra lavoro esterno fatto sul sistema e
calore trasferito alla sostanza: per ogni caloria trasferita al sistema si fanno 4,186J di lavoro
meccanico. La portata concettuale di questa equivalenza è il fatto di poter accostare il calore al
lavoro e all’energia, affermando che sono possibili trasformazioni dell’uno negli altri e viceversa,
secondo l’equivalenza 1cal = 4, 186J.
• Principio zero della termodinamica: Se un corpo A ha la medesima temperatura di un
corpo B ed il corpo B ha la medesima temperatura di un corpo C, allora A e C hanno la stessa
temperatura. Questo principio che sembra banale permette però di definire l’equilibrio termico
tra corpi che non possono essere messi a contatto tra loro, con l’uso di un terzo corpo che può
essere ad esempio un termometro.
• Convenzioni di segno per calore e lavoro: evidenziamo qui inizialmente le convenzioni per
il segno di calore e lavoro rispettivamente assorbito/ceduto e fatto/subito:
Francesco Saitta, Pordenone Febbraio 2017
116
CAPITOLO 6. TERMODINAMICA
– Q > 0 - calore assorbito dal gas;
– Q < 0 - calore ceduto dal gas;
– L > 0 - lavoro fatto dal gas;
– L < 0 - lavoro subito dal gas.
Prima di proseguire con i due principi della termodinamica che ci permetteranno di capire come
trattare la dinamica di sistemi in cui consideriamo anche lo scambio di calore nel bilancio energetico
studieremo un modello microscopico per i gas perfetti, che ci aiuterà nella comprensione della natura
di grandezze come la temperatura e l’energia cinetica associata ad un gas.
6.1
Teoria cinetica dei gas perfetti
Il modello che costruiremo in questo paragrafo per i gas perfetti ci permetterà di capire la natura
microscopica di alcune grandezze termodinamiche che in genere consideriamo come riassuntive del
sistema (pressione, temperatura); questo modello è un primo esempio di quella branca della fisica
chiamata fisica statistica che cerca di studiare un sistema complesso come somma o unione di
moltissimi sistemi elementari: un intero libro di una delle collane più famose di fisica teorica (Landau
e Lifshitz, 1999b) fu dedicato a questa parte di scienza che noi studieremo solamente nella sua parte
più semplice ed iniziale.
Figura 6.1: Gas perfetto in una scatola: sono qui rappresentate solo 11 particelle, evidentemente nella
nostra schematizzazione il numero di particelle di gas è molto più elevato.
Consideriamo quindi un gas perfetto in una scatola cubica di lato l: ogni particella i si muoverà quindi
in una direzione casuale con una certa velocità ~vi , come rappresentato in figura (6.1). Fissando un
sistema cartesiano in un angolo della scatola possiamo scomporre le velocità di ogni particella nelle tre
direzioni ~vi = (vix ; viy ; viz ) ed analizzare la dinamica del problema una direzione alla volta. Secondo
le ipotesi di gas perfetto le particelle urtano sempre in modo elastico con le pareti della scatola:
come descritto dalla figura (6.2), ogni volta che una particella urta con una parete la componente
Francesco Saitta, Pordenone Febbraio 2017
117
CAPITOLO 6. TERMODINAMICA
perpendicolare alla superficie della sua quantità di moto si inverte e dunque la particella imprime
sulla parete una forza F~⊥ 1
2m~v⊥
∆~q⊥
=
F~⊥ = −
∆t
∆t
Le particelle si muovono senza interazioni interne, le componenti della loro velocità restano sempre
Figura 6.2: Urto di una particella di gas contro una parete della scatola.
costanti tranne quando si invertono per l’urto con una parete, l’urto con la parete avviene quindi ogni
∆t = 2l/v⊥ e la forza diventa
2
mv⊥
F⊥ =
l
Immaginando quindi che nella scatola ci siano N particelle la forza media che viene applicata su una
parete dal gas è data da
N
mX 2
Fm =
v⊥ i
l
i=1
e dunque la pressione esercitata dal gas su una parete della scatola è data dal rapporto tra la forza
media applicata e la superficie della parete:
P =
N
N
i=1
i=1
mX 2
mX 2
v⊥i =
v⊥i
3
l
V
con V = l3 il volume della scatola. A questo punto notiamo come nelle ipotesi di gas perfetto e moto
casuale le componenti di velocità del gas nelle tre direzioni cartesiane x, y, z devono provocare la stessa
pressione in ogni parete; si dovrà avere
N
X
i=1
vx2i
=
N
X
i=1
vy2i
=
N
X
i=1
vz2i (=
N
X
2
v⊥
)
i
i=1
1
Facciamo notare come la forza impressa sulla particella è data dalla variazione della quantità di moto della particella
rispetto al tempo, e dunque la forza che la particella imprime sulla parete è data, per il terzo principio della dinamica,
dalla sua opposta
Francesco Saitta, Pordenone Febbraio 2017
118
CAPITOLO 6. TERMODINAMICA
e quindi
N
X
i=1
vi2
N
N
N
N
N
X
X
X
X
X
2
2
2
2
2
2
2
=
(vxi + vyi + vzi ) =
v xi +
vyi +
v zi = 3
v⊥
i
i=1
i=1
i=1
i=1
i=1
da cui
P
=
PV
=
N
m X 2
vi
3V
m
3
i=1
N
X
vi2
i=1
A questo punto possiamo utilizzare la legge di stato dei gas perfetti per dare un’interpretazione
microscopica della temperatura, in funzione delle velocità delle particelle di gas:
nRT =
N
N
i=1
i=1
mX 2
m X 2
vi =⇒ T =
vi ,
3
3nR
che sostanzialmente lega la temperatura di un gas con il grado di agitazione meccanica delle particelle
che lo compongono, per questo spesso si parla di temperatura come misura dell’agitazione termica del
gas; la costante di proporzionalità può essere riscritta ricordando che il numero di moli è uguale al
numero di molecole fratto il numero di Avogadro:
N
N
NA m X 2
n=
=⇒ T =
vi ,
NA
3N R
i=1
Questo passaggio sembra complicare la formula, ma ci permette di intravedere la velocità quadratica
media all’interno della formula; si definisce velocità quadratica media di un gas:
s
PN 2
i=1 vi
vqm =
N
La velocità quadratica media di un gas, vqm , è un numero che ci fornisce informazioni sulla media dei
moduli delle velocità delle particelle: non tiene infatti conto della direzione delle velocità ma solamente
dei suoi moduli. È inoltre interessante perché legata all’energia cinetica media del gas, E c :
PN
Ec =
1
2
i=1 2 mvi
N
1
2
= mvqm
2
Ecco che sostituendo quest’espressione nella relazione ottenuta precedentemente per la temperatura
otteniamo:
2NA
T =
Ec
(6.1.1)
3R
la temperatura è dunque una grandezza fisica direttamente proporzionale all’energia cinetica media
del gas! Questa relazione conferma e quantifica in modo preciso l’intuizione di temperatura legata
all’agitazione termica e quindi al movimento delle particelle componenti il gas. L’equazione (6.1.1) è
solitamente espressa come:
3
Ec = kB T
(6.1.2)
2
Francesco Saitta, Pordenone Febbraio 2017
119
CAPITOLO 6. TERMODINAMICA
con kB = R/NA ∼ 1, 38 × 10−23 J/K, la costante di Boltzmann. Notiamo anche come la legge di
stato dei gas perfetti possa essere scritta in termini formalmente identici con la costante universale
dei gas perfetti
P V = nRT
oppure con la costante di Boltzmann
P V = N kB T
Questi due modi apparentemente uguali per scrivere la legge indicano però due visioni opposte: la
prima una visione macroscopica che coinvolge il numero di moli del gas, mentre la seconda una visione
microscopica che coinvolge invece il numero esatto di particelle che compongono il gas.
6.1.1
Principio di equipartizione dell’energia
L’equazione (6.1.2), oltre a dare significato fisico alla temperatura, esprime il punto di partenza per
i ragionamenti che hanno portato alla formulazione di un importante principio della fisica statistica,
il quale asserisce che l’energia totale di un gas si distribuisce equamente sui gradi di libertà delle
molecole che lo costituiscono; ad ogni grado di libertà corrisponde una quantità di energia cinetica pari
a 1/2kB T . Senza entrare nei dettagli diciamo qui che per grado di libertà di un corpo rigido in fisica si
intende il numero minimo di variabili indipendenti tra loro con le quali è possibile definire la posizione
e l’orientamento del corpo stesso. Nel caso di punti materiali non vincolati ogni punto materiale porta
con sé 3 gradi di libertà, ma già una molecola biatomica ha 5 gradi di libertà: i due punti materiali
avrebbero in tutto 6 gradi di libertà, ma sono vincolati a stare ad una certa distanza media, il che
riduce i gradi a 5. Per quanto riguarda il nostro interesse è importante sapere che un gas composto da
molecole monoatomiche ha 3 gradi di libertà, biatomiche 5 e triatomiche 7. È importante notare invece
la portata concettuale di questo principio: ancora una volta la natura si comporta in modo simmetrico
e matematicamente elegante distribuendo in modo che potremmo definire democratico l’energia nelle
diverse coordinate che definiscono il gas e di come la sua energia cinetica media dipenda da quanto si
muovono le molecole al suo interno e da come sono fatte (e quindi dai modi in cui si possono muovere).
Evidentemente quindi la (6.1.2) può essere generalizzata, per un gas con f gradi di libertà:
Ec =
6.2
6.2.1
f
kB T
2
(6.1.3)
First principle of thermodynamics
Introduction to Thermodynamics
Thermodynamics was born in the early nineteenth century, during the industrial revolution, to improve
the efficiency of steam engines. Then, thanks to scientists as James Joule (Saldford, 1818 - Sale, 1889),
Rudolf Clausius (Koslin, 1822 - Bonn, 1888), William Thomson ”Lord Kelvin” (Belfast, 1824 - Largs,
1907), Sadi Carnot (Parigi, 1796 - Parigi, 1832), Ludwig Boltzmann (Vienna, 1844 - Duino, 1906),
thermodynamics has become the branch of physics that studies the exchange of energy between a
system and its environment. The starting point for the work of these scientists of thermodynamics
has been their discovery that the heat is not a fluid-like substance, but is a measure of the energy
exchanged in thermodynamical processes. Joule’s experiment, we studied last year, pointed out how
mechanical work done on a system can be tranformed into heat finding the equivalence between heat
and mechanical work: 1Kcal = 4186J. Once accepted this fact has been natural to study all physical
phenomena, in particular those involving gases, taking into account heat in the energy exchanges:
this led to the formulation of the first law of thermodynamics, which we will analyze in detail in
Francesco Saitta, Pordenone Febbraio 2017
120
CAPITOLO 6. TERMODINAMICA
these notes, stating that the total energy is conserved regardless of the nature of forces involved in
the considered system. Using the first principle of thermodynamics it was possible to study many
kinds of steam engines and thermal machines, from an energetic point of view, trying to maximize
their efficency. We will analyze in detail the thermal machines in the next section, but we have to
say here that a thermal engine is a tool that converts heat into mechanical work, and was discovered
by physicists such as Carnot, Clausius and Kelvin, that it is impossible to take a certain amount of
heat and transform all of it into mechanical work: in other words, it is impossible to have a thermal
machine with a 100 % efficency. This is only one formulation of the second law of thermodynamics: in
the 1860s Clausius introduced entropy as a ratio of heat to temperature, and stated the Second Law
in terms of the increase of this quantity. Boltzmann then gave a statistical intepretation of entropy, as
the ”disorder degree” of a system, and the second law became the law of the increasing disorder in the
Universe. In this way, the second law has become important not only from the ”thermodynamic” point
of view, but also from the philosophical one; according to thermodynamics, the universe slowly will
die because all the reactions within it will lead to a uniform heat distribution, all warm regions (stars)
of the universe will disappear and so life (human life in particular): this is called the ”heat death” of
the universe. As we shall see in a couple of years, during the twentieth century many new physical
theories were developed in disagreement or in completion of all the classical theories: in particular,
quantum mechanics, relativity and modern cosmology can explain different scenarios for the evolution
of the universe.
6.2.2
Thermal Machines
We define as thermal machine any tool that, by means of thermodynamic processes, transforms heat
into mechanical work. This general definition needs to be schematized to be described in a scientific
way, anche the scheme is the following:
• the system is a gas inside a cylinder, closed by a piston;
• moving the piston the gas can change its volume;
• the gas can exchange heat with external sources;
• an ideal source, heat reservoir, is a source with heat capacity C = ∞: it does not change
temperature even exchanging heat with the system;
• the overall thermodynamical process as to be cyclic, the gas has to became again to its initial
condition to restart the process.
The simplest thermal machine we can imagine is described in fig.(6.3), a black box where all the
thermodynamical processes take place, absorbing heat from a hot source, giving heat to a cold source,
and producing mechanical work. Then, since heat is a kind of energy, it has to be L = Q2 − Q1 .
To define and study precisely a thermal machine we have to understand which is the energy involved
and how this energy can turn into mechanical work, that is what we are going to study in the next
paragraphs.
6.2.3
Internal Energy
As already seen in the study of the kinetic model for an ideal gas, temperature is the macroscopic
effect of the average kinetic energy of the gas. Since for an ideal gas there is no potential energy (there
are no interactions, the gas is ”free”), there is no ”structure” in the gas molecules and they interact
just by means of elastic scattering, the kinetic energy is simply mv 2 /2 for each molecule and can be
Francesco Saitta, Pordenone Febbraio 2017
121
CAPITOLO 6. TERMODINAMICA
Figura 6.3: A generic thermal machine
considered as the total energy of the gas. This total average energy of internal molecular motion is
called internal energy and should always be taken into account when considering the conservation of
energy.
The internal energy of an ideal gas of N molecules can be expressed in terms of the average kinetic
energy of the molecules
3
U = N hEk i = nRT ;
2
so at any change on the gas temperature it will correspond a change on the internal energy ∆U =
3
2 nR∆T .
This energy is also interpreted in terms of a heat exchange: U = Cv T , where Cv is called the “heat
capacity at constant volume”, the heat necessary to change the temperature of the gas by 1 degree
through a process with constant volume: it equals 23 nR for monoatomic gases, 25 nR for biatomic
gases, it holds the same rule of the equipartion theorem. We define also the “molar heat capacity at
constant volume”: cv = Cv /n the heat necessary to change the temperature of one mole of the gas
by 1 degree through a process with constant volume; we will see that this definition is useful studying
the conservation of energy in thermodynamics.
We also notice here that the internal energy is a function of state, i.e. it depends only on the
temperature of the gas, it is defined for each point in the Clapeyron space of the gas.
6.2.4
Heat capacities of gases
We studied that the heat exchange between two bodies or fluids is regulated by
Q = C∆T,
where C is a constant depending on the bodies or fluids called heat capacity. We are going to study
in these pages that the heat exchange between gases (or between gases and a body) depend on the
particular process acting on the gas. In this perspective is simple to understand that the heat capacity
Francesco Saitta, Pordenone Febbraio 2017
122
CAPITOLO 6. TERMODINAMICA
of a gas is not a constant but depends on the thermodynamical process the gas is involved into; we
define two heat capacities in particular:
1. heat capacity at constant volume Cv - if the gas is involved into an isochoric process the
heat exchange is given by
Q = Cv ∆T
2. heat capacity at constant pressure Cp - if the gas is involved into an isobaric process the
heat exchange is given by
Q = Cp ∆T
6.2.5
Mechanical work of gases
The internal energy of a system can be increased at the expense of mechanical energy as was demonstrated in Joule’s experiment: there exist machines that produce mechanical work depending on what
processes are involved in their functioning. We will always refer to a gas ( with state parameters
(p, V, T ) representing pressure, volume and temperature ) inserted in a cilinder with a base surface
S; the piston will move into the cylinder under the effect of external forces or the pressure of the gas
itself. Therefore the mechanical work done by the gas will be connected with the motion of the piston:
dL = F~ · d~s = F ∗ ds = p ∗ S ∗ ds = pdV (general expression even if the force is not constant). As
in mechanics the work is represented by the area under the curve F(s) in the s-F plane or, as in our
case, the area under the curve p(V) in the V-P plane (Clapeyron plane).
Figura 6.4: A generic cylinder filled with gas and the representation of the work made by the gas itself
on the piston
Francesco Saitta, Pordenone Febbraio 2017
123
CAPITOLO 6. TERMODINAMICA
Isobaric processes
An isobaric process (fig.(6.5)) is a thermodynamical process in which the pressure stays constant.
Since the pressure is constant the force acting on the system is constant, therefore the work will be:
L = F~ · ~s = p ∗ S ∗ s = p ∗ ∆V .
Figura 6.5: An isobaric process in the Claperyron Plane
In our practical example we would have a movable piston in a cylinder, so that the pressure inside
the cylinder is always at the pressure given by the piston and the atmosphere. An increase in the
temperature of the gas would imply an increase in the volume of the piston, in such a way to mantain
the same pressure given by the piston.
Isothermal processes
An isothermal process is a process where the gas is maintained at the same temperature, being in
contact with a huge body called “heat reservoir”, a body with C = +∞. The temperature of the gas
Francesco Saitta, Pordenone Febbraio 2017
124
CAPITOLO 6. TERMODINAMICA
remains constant because the heat is free to flow from the gas to the heat reservoir. In an isothermal
expansion (fig.(6.6)), if the system is closed, the pressure will be inversely proportional to the volume:
P V = nRT = P0 V0 . In this case the work as a more complicated expression than the isobaric one:
Vf 2
dL = p ∗ dV = nRT
V dV ⇒ L = nRT ln Vi .
Figura 6.6: An isothermal process in the Claperyron Plane
In our practical example we would have the system immersed in a large constant-temperature bath
(imagine a huge mixture of water and ice at 273K). Any work performed by the system will be lost
to the bath, but its temperature will remain constant: an increase in volume of the gas would imply
a decrease in pressure, and viceversa.
Isochoric processes
An isochoric process (fig.(6.7)), also called a constant-volume process, is a thermodynamic process
during which the volume of the closed system undergoing such a process remains constant. The work
done by the gas in this case is zero: dL = p ∗ dV = 0.
2
We have to define here the mathematical function called logarithm y = ln(x). This function will be formally defined
during next year in the math class; for our purposes we can say that y = ln( xx21 ), x1 ∈ R+ , x2 ∈ R+ , is the area between
the x-axis of the cartesian plane and the function y = 1/x between x1 and x2 . At the moment you can easily calculate
the logarithm of a number using your electronic calculators.
Francesco Saitta, Pordenone Febbraio 2017
125
CAPITOLO 6. TERMODINAMICA
Figura 6.7: An isochoric process in the Claperyron Plane
In our practical example we would have the piston locked in a particular position (for example screwed
to close the cylinder): an increase in temperature would imply in this case an increase in pressure,
and viceversa. An isochoric process is also known as an isometric process or an isovolumetric process.
Adiabatic processes
An adiabatic process (fig.(6.8)) is a thermodynamic process in which no heat is transferred to or from
the working gas. If there is no heat transferred all the work done by the gas is enterly connected with
a change in the internal energy of the gas itself, therefore L = −∆U = −ncv ∆T .
In our practical example we would have both the cylinder and the piston made by perfect thermal
insulator, in such a way that there cannot be any exchange of heat or energy between the gas and the
external atmosphere. It can be prooved that in an adiabatic process holds the relation PA VAγ = PB VBγ ,
C
where γ = Cvp ; Cp is the so called ”heat capacity at constant pressure”, the heat necessary to change
the temperature of the gas by 1 degree through a process with constant pressure. We will define also
cp as the “molar heat capacity at constant pressure”.
Francesco Saitta, Pordenone Febbraio 2017
126
CAPITOLO 6. TERMODINAMICA
Figura 6.8: An adiabatic process in the Claperyron Plane
6.2.6
The first law of thermodynamics
We are now ready to introduce the ”first law of thermodynamics”, which is nothing more than the
conservation law for internal and mechanical energy into a thermodynamical system. The starting
point of this principle is the experimental observation that in any thermodynamical process the difference between the heat exchanged and the work done by the system is a particular function depending
only on the initial and final state of the system, representing the total energy of the system. This
function turns out to be (when taking into account ideal gases) the internal energy previously defined.
1. Energy conservation in an adiabatic process. If there are no exchanges of heat with the
environment (as in an adiabatic process) than conservation of energy requires that the work L
done by the gas be equal to the loss of its internal energy U:
L = −∆U
where the minus sign means that the internal energy is lost when the gas expands and does
work.
2. Energy Conservation in an Isothermal Process. If we consider an isothermal expansion of
the gas we notice that the internal energy has to be constant (U = U (T )). If the internal energy
has to be constant all the work done by the gas has to turn into heat, and all the heat given
to the gas has to be spent by means of mechanical work. The work L done by the gas must be
Francesco Saitta, Pordenone Febbraio 2017
127
CAPITOLO 6. TERMODINAMICA
equal to the heat Q absorbed by it:
L=Q
3. Energy conservation in an isochoric process. If the volume of the gas is not changing all
the heat taken or given to the gas cannot transform in mechanical work, since the piston cannot
move, but it transforms into an increase or loss of internal energy; if the gas acquires heat it will
increase the internal energy, otherwise the internal energy will decrease:
Q = ∆U
4. Energy conservation in a general process: First law of thermodynamics. In a general
process usually both heat and internal energy are converted into work. Since heat absorbed by
the gas contributes to making work, and a loss of internal energy can be turned into work, the
total balance of work, heat and internal energy is:
L = Q − ∆U,
or
∆U = Q − L
and is known as the first law of thermodynamics. It says that the internal energy gained
by a system must be equal to the heat absorbed by the system minus work done by the system.
5. First law and the Mayer relationship . Let’s consider a general process in the Clapeyron
plane: it can be decomposed into many tiny isobaric processes. For each of these processes holds
∆U = Q − L,
where3
∆U = ncv ∆T,
Q = ncp ∆T
L = p∆V = nR∆T.
We can conclude that for any thermal process the first principle of thermodynamics, the conservation of energy in thermal processes, can be written as the Mayer relationship:
cp − cv = R.
This law connects a universal constant, R, with two particular constants depending on the gas
we are considering: no matter which gas we are dealing with, the difference between cp and cv
will equal the constant R!
3
The first relation holds for any process, the second one holds since each process is an isobaric process, and the last
one can be obtained using the universal law of ideal gases.
Francesco Saitta, Pordenone Febbraio 2017
128
CAPITOLO 6. TERMODINAMICA
6.3
Rendimento delle macchine termiche
Dal punto di vista tecnologico di chi progetta una macchina termica è interessato a capire quanta
percentuale del calore che viene ceduto alla macchina termica dall’esterno verrà convertito in lavoro. Questo indicatore, solitamente rappresentato con la lettera greca η, è detto rendimento della
macchina termica:
L
η=
(6.3.1)
Qa
Dove L è il lavoro prodotto dalla macchina termica e Qa il calore assorbito dalla macchina stessa
(ceduto alla macchina dall’ambiente esterno). Dalle considerazioni del paragrafo precedente, visto che
una macchina termica deve essere ciclica per poter essere utilizzabile in modo industriale e non essere
“usa e getta”, possiamo definire il rendimento di una macchina termica su un singolo ciclo:
η=
L
Qa − Qc
Qa
=
=1−
Qa
Qa
Qc
(6.3.2)
con Qc il valore assoluto del calore ceduto dalla macchina termica all’ambiente esterno. La costruzione di macchine termiche iniziò già tra il diciassettesimo ed il diciottesimo secolo in Inghilterra per
opera di scienziati come Denis Papin (Blois, 1647 - Londra 1714), Thomas Savery (Shilstone, 1650 Londra 1715), Thomas Newcomen (Dartmouth, 1663 - Londra 1729) e James Watt (Greenock, 1736 Handsworth, 1819); fu però nella Francia del secolo successivo che la tecnica si coniugò con lo studio
scientifico analitico ed approfondito della termodinamica, per opera sopratutto di Sadi Carnot (Parigi,
1796 - Parigi, 1832). Vediamo di seguito alcune delle più famose macchine termiche, alcune delle quali
hanno contribuito in modo decisivo alla rivoluzione industriale del diciannovesimo secolo e sono state
protagoniste della tecnica fino ai giorni nostri.
6.3.1
Macchina di Stirling
La macchina di Stirling fu realizzata e brevettata nel 1816 dal pastore protestante scozzese Robert
Stirling (Methven, 1790 - Methven 1878), ed è ancora oggi in commercio. Si tratta di un motore ad
aria calda di cui non studieremo i dettagli ingegneristici ma che risponde al ciclo termodinamico in
figura (6.9): il motore lavora tra due temperature Tc la temperatura più calda e Tf ed i due volumi
V1 e V2 con due trasformazioni isocore e due isoterme. Studiamo l’energetica del ciclo di Stirling:
• A −→ B: La trasformazione è isocora, per cui il lavoro fatto dal gas è nullo e il calore assorbito
è dato dalla differenza di energia interna Q = ∆U = ncv ∆T = ncv (Tc − Tf ) > 0
• B −→ C: La trasformazione è isoterma, per cui il lavoro fatto dal gas è uguale al calore assorbito
nell’espansione da V1 a V2 Q = L = nRTc ln(V2 /V1 ) > 0
• C −→ D: La trasformazione è nuovamente isocora, con calore ceduto dal gas Q = ∆U =
ncv ∆T = ncv (Tf − Tc ) < 0
• D −→ A: La trasformazione è isoterma, con lavoro subito dal gas uguale al calore ceduto per la
compressione da V2 a V1 Q = L = nRTf ln(V1 /V2 ) < 0
I due calori scambiati nelle trasformazioni isocore sono chiamati di rigenerazione e non vengono scambiati con l’esterno: la macchina è studiata in modo che il calore di rigenerazione ceduto nella trasformazione C −→ D viene restituito al gas nella trasformazione A −→ B; il rendimento della macchina
Francesco Saitta, Pordenone Febbraio 2017
129
CAPITOLO 6. TERMODINAMICA
Figura 6.9: Ciclo termodinamico di Stirling A → B → C → D tra le due temperature Tc e Tf e i due
volumi V1 e V2 .
di Stirling (ideale) è dunque
nRTf ln(V1 /V2 )
nRTc ln(V2 /V1 )
Tf
= 1−
Tc
η = 1−
6.3.2
Macchina di Carnot
La macchina di Carnot fu concepita dal fisico francese in una sua opera fondamentale (Carnot, 1824),
nella quale pose le basi per moltissimi concetti fondanti per la termodinamica che stiamo studiando,
tra cui l’introduzione della macchina di Carnot, descritta in figura (6.10). Questa macchina è una
macchina teorica, pensata dal fisico francese con l’intento di costruire la macchina termica lavorante
tra due sorgenti termiche con il massimo rendimento possibile: per questo pensò di connettere le due
isoterme dove avviene lo scambio di calore con le sorgenti con due trasformazioni adiabatiche, in cui
non c’è scambio di calore. Studiando l’energetica della macchina:
• A −→ B: La trasformazione è adiabatica, per cui il calore scambiato dal gas è nullo ed il lavoro
fatto è dato dalla differenza di energia interna L = ∆U = ncv ∆T = ncv (Tc − Tf ) > 0
• B −→ C: La trasformazione è isoterma, per cui il lavoro fatto dal gas è uguale al calore assorbito
nell’espansione da VB a VC Q = L = nRTc ln(VC /VB ) > 0
• C −→ D: La trasformazione è nuovamente adiabatica, con lavoro subito dal gas L = ∆U =
ncv ∆T = ncv (Tf − Tc ) < 0
• D −→ A: La trasformazione è isoterma, con lavoro subito dal gas uguale al calore ceduto per la
compressione da VD a VA Q = L = nRTf ln(VA /VD ) < 0
Francesco Saitta, Pordenone Febbraio 2017
130
CAPITOLO 6. TERMODINAMICA
Figura 6.10: Ciclo termodinamico di Carnot A → B → C → D tra le due temperature Ti e Tf .
Anche in questo caso possiamo calcolare il rendimento con la (6.3.2):
η =1−
Tf ln(VC /VB )
nRTf ln(VC /VB )
=
nRTc ln(VA /VD )
Tc ln(VA /VD )
(6.3.3)
Possiamo ottenere una relazione migliore andando a valutare il rapporto VC /VB ed il rapporto VA /VD
sfruttando le leggi delle trasformazioni adiabatiche ed isoterme. Valgono sicuramente:
pA VAγ = pB VBγ
pB VB = pC VC
pC VCγ = pD VDγ
pD VD = pA VA
che possono essere riscritte come:
pA VAγ = pB VBγ
pB = pC
VC
VB
pC = pD
VDγ
VCγ
pD = pA
VA
VD
che ci suggerisce di sostituire tutte le pressioni delle ultime tre equazioni per ottenere:
pA VAγ = pA
Francesco Saitta, Pordenone Febbraio 2017
VA VDγ−1 VBγ−1
VCγ−1
131
CAPITOLO 6. TERMODINAMICA
che si può scrivere come
VA
VD
γ−1
=
VB
VC
γ−1
ovvero
VB
VA
=
VD
VC
che sostituito nel rendimento della macchina di Carnot (6.3.3) restituisce un’espressione molto più
semplice:
Tf
ηc = 1 −
(6.3.4)
Tc
È facile notare come questo rendimento sia uguale a quello di una macchina di Stirling che lavora tra
le stesse due temperature; ci daremo ragione di questo fatto nei prossimi paragrafi.
6.3.3
Macchina di Otto (motore 4 tempi)
La macchina di Otto, conosciuta anche come motore a 4 tempi, ancora oggi alla base della costruzione
della maggior parte dei motori a benzina, fu proposta dall’ingegnere tedesco Nikolaus August Otto
(Holzhausen, 1832 - Colonia, 1891) nel 1876. La macchina dal punto di vista termodinamico ideale
è descritta in figura (6.11). Quando questa serie di trasformazioni termodinamiche è implementata
Figura 6.11: Trasformazioni termodinamiche per la macchina di Otto a 4 tempi A → B → C → D →
E → B → A.
per il funzionamento di un motore a benzina dobbiamo immaginare un sistema come rappresentato in
figura (6.12). Descriviamo qui i 4 tempi della macchina:
• Aspirazione A −→ B: il pistone si trova nella sua posizione più alta, si apre la valvola di
aspirazione, viene inserita dal carburatore (o dall’impianto di iniezione) il gas (una miscela di
aria e benzina nel caso del motore a benzina) a pressione costante in quanto l’apertura della
valvola mette a pressione atmosferica il gas all’interno del cilindro. Il gas si espande quindi dal
volume V1 al volume V2 .
Francesco Saitta, Pordenone Febbraio 2017
132
CAPITOLO 6. TERMODINAMICA
Figura 6.12: Il cuore termodinamico di un motore a scoppio
• Compressione B −→ C: si chiude la valvola di aspirazione, il gas all’interno del cilindro subisce
una compressione dovuta all’inerzia del pistone che nel ciclo ideale possiamo considerare come
adiabatica. In questa fase non vi è scambio di calore con l’esterno ed il lavoro subito dal gas è
dato da L = −∆U = ncv ∆T = ncv (TC − TB ) < 0
• Scoppio ed espansione C −→ D −→ E: quando il pistone si trova nel punto più alto una
candela posta tra le due valvole scocca una scintilla; la temperatura del gas aumenta molto e
molto velocemente (a volume costante) provocando la combustione del gas che di conseguenza
si dilata spingendo nuovamente il pistone verso il basso. Nel ciclo ideale questa trasformazione
può essere di nuovo considerata adiabatica. Nella fase isocora non vi è lavoro ed il gas acquista
il calore Q = ∆U = ncv ∆T = ncv (TD − TC ) > 0. Nella fase adiabatica il gas si espande senza
scambiare calore con l’esterno, dunque compie il lavoro L = −∆U = ncv ∆T = ncv (TE −TD ) > 0
• Scarico E −→ B −→ A: quando il pistone si trova nella sua posizione più bassa, si apre la
valvola di scarico permettendo al gas di uscire dal cilindro: a volume costante la pressione torna
al valore iniziale di pressione atmosferica, di seguito il pistone per inerzia torna verso l’alto
spingendo il gas fuori dal cilindro. Nella fase isocora il gas non compie lavoro, cede il calore
Q = ∆U = ncv ∆T = ncv (TB − TE ) < 0. Nella fase isobara il gas esce dal cilindro e fa tornare il
pistone nella posizione iniziale ed il ciclo può ricominciare dall’iniezione.
Il rendimento termodinamico della macchina si può calcolare sul ciclo B −→ C −→ D −→ B:
η =1−
ncv (TE − TB )
TE − TB
=1−
ncv (TD − TC )
TD − TC
(6.3.5)
Possiamo ottenere una relazione migliore andando a valutare il rapporto TE /TB ed il rapporto TC /TD
sfruttando le leggi delle trasformazioni adiabatiche:
TB VBγ−1 = TC VCγ−1
Francesco Saitta, Pordenone Febbraio 2017
133
CAPITOLO 6. TERMODINAMICA
TE VEγ−1 = TD VDγ−1
Da cui, sapendo che VC = VD VE = VB e dividendo membro a membro le equazioni possiamo ottenere
TC
TB
=
TE
TD
Vale dunque
TE 1 −
η =1−
TD 1 −
TB
TE
TC
TD
=1−
TE
TD
Ecco allora che il rendimento della macchina di Otto è più semplice e in dipendenza unicamente delle
due temperature TB e TD . Usando ancora le equazioni delle trasformazioni adiabatiche possiamo
esprimere questo rendimento come
η =1−
TE
V γ−1
= 1 − 1γ−1
TD
V2
in unica dipendenza dei due volumi V2 e V1 , la geometria del cilindro e del tipo di gas γ = cp /cv . Il rapporto r = V2 /V1 viene solitamente chiamato rapporto di compressione e di conseguenza il rendimento
si esprime come
η = 1 − r1−γ
(6.3.6)
6.3.4
Macchina Diesel
La macchina Diesel, brevettata nel 1892 da Rudolf Diesel (Parigi, 1858 - canale della manica, 1913),
si differenzia dal punto di vista termodinamico dal motore Otto per la modalità di scoppio del gas,
come descritto dal grafico (6.13). La combustione del gas in un ciclo Diesel non viene innescata dalla
scintilla di una candela ma dalla compressione del gas stesso. La fase di scoppio (l’isocora del ciclo
precedente) in questo caso viene sostituita con un’espansione isobara. Con un’analisi analoga a quella
Figura 6.13: Ciclo termodinamico Diesel 4 tempi A → B → C → D → E → B → A.
Francesco Saitta, Pordenone Febbraio 2017
134
CAPITOLO 6. TERMODINAMICA
fatta per il ciclo Otto possiamo trovare il rendimento termodinamico della macchina Diesel in funzione
delle temperature TB ,TC ,TD ,TE :
cv TE − TB
η =1−
cp TD − TC
Per riscrivere in modo più semplice questo rendimento è conveniente esplicitare il rapporto di compressione r = V2 /V1 ed il rapporto di combustione c = V3 /V2 per poi ottenere il rendimento
η = 1 − r1−γ
6.3.5
cγ − 1
γ(c − 1)
(6.3.7)
Macchina Frigorifero
Definiamo macchina frigorifero una macchina termica il cui effetto è quello di assorbire calore da una
sorgente ad una temperatura Tf e cederlo ad una sorgente Tc , con Tc < Tf subendo una certa quantità
di lavoro L, che per il primo principio della termodinamica è dato da L = Qa − Qc . Pensandoci
bene questo ciclo termodinamico descrive proprio ciò che accade nel frigorifero di casa nostra: è un
elettrodomestico che prende calore da un ambiente freddo (l’interno del frigorifero) e lo cede all’esterno
(il retro dei nostri frigoriferi ha solitamente una serpentina che si scalda con l’uso del frigorifero)
subendo il lavoro fornito dalla rete elettrica di casa. Nel caso delle macchine frigorifere non si parla
Figura 6.14: Ciclo frigorifero, il passaggio di calore dalla temperatura più fredda Tf e la temperatura
più calda Tc , subendo il lavoro L
di rendimento termodinamico ma di coefficiente di prestazione k, che esprime la quantità di calore
ceduto alla sorgente calda rispetto al lavoro subito:
Qc
(6.3.8)
L
Applicazione comune del modello frigorifero, sono le pompe di calore: strumenti che vediamo abitualmente nelle case e che chiamiamo solitamente condizionatori elettrici. Essi spostano calore
da una sorgente a temperatura minore ad una a temperatura maggiore sfruttando il lavoro della rete
elettrica: possono essere usati per scaldare l’interno di un edificio d’inverno, prendendo il calore dall’esterno e cedendolo all’interno, o per raffreddarlo d’estate, prendendo il calore dall’interno e cedendolo
all’esterno.
k=
Francesco Saitta, Pordenone Febbraio 2017
135
CAPITOLO 6. TERMODINAMICA
6.4
Secondo principio della termodinamica
Il secondo principio della termodinamica può essere espresso in diverse forme, come vedremo nei
prossimi paragrafi, ognuna della quali riporta sempre allo stesso concetto: qualsiasi macchina termica
possiamo inventarci, il budget energetico dell’universo sarà sempre a favore della dispersione di energia
in calore. Applicato alla nostra esperienza quotidiana4 questo principio può sembrare ovvio e per
nulla fondamentale, ma di fronte ad un’attenta analisi che cercheremo di impostare qui ci accorgeremo
dell’importanza concettuale che si cela dietro a questa considerazione.
6.4.1
Enunciati di Clausius, Kelvin-Planck e loro equivalenza
Enunciato di Clausius Non si può costruire una macchina termica il cui unico risultato sia quello
di trasferire calore da una sorgente fredda ad una sorgente calda.
Enunciato di Kelvin-Planck Non si può costruire una macchina termica il cui unico risultato sia
quello di produrre lavoro assorbendo calore da un’unica sorgente.
Equivalenza dei due enunciati Per dimostrare l’equivalenza dei due enunciati procederemo con
una dimostrazione per assurdo nel seguente modo: invece di dimostrare che l’enunciato di Clausius
(Cl) implica l’enunciato di Kelvin-Planck (KP) Cl =⇒ KP e viceversa KP =⇒ Cl dimostreremo
che la negazione dell’enunciato di Clausius (nCl) implica la negazione dell’enunciato di Kelvin-Planck
(nKP) nCl =⇒ nKP e viceversa nKP =⇒ nCl.
nCl =⇒ nKP
Immaginiamo di avere a disposizione una macchina termica che neghi l’enunciato di Clausius e di
collegarla ad una macchina termica che invece rispetta l’enunciato di Kelvin-Planck come in figura
(6.15). L’effetto netto della macchina in figura è quello di assorbire una quantità di calore Q2 −Q1 dalla
sorgente calda, producendo un lavoro L senza cedere calore alla sorgente fredda: negando l’enunciato
di Clausius siamo riusciti a negare l’enunciato di kelvin-Planck costruendo una macchina termica il
cui unico risultato è quello di produrre lavoro assorbendo calore da un’unica sorgente!
nKP =⇒ nCl
Immaginiamo ora di avere a disposizione una macchina termica che neghi l’enunciato di Kelvin-Planck
e di collegarla ad una macchina termica che invece rispetta l’enunciato di Clausius come in figura (6.16).
L’effetto netto della macchina in figura è quello di trasferire il calore Q2 da una sorgente fredda ad una
calda senza subire lavoro dall’esterno: negando l’enunciato di Kelvin-Planck siamo riusciti a negare
l’enunciato di Clausius costruendo una macchina termica il cui unico risultato è quello di trasferire
calore da una sorgente fredda ad una sorgente calda!
6.4.2
Enunciato di Carnot ed entropia
Enunciato di Carnot
Non si può costruire una macchina termica che lavora tra due sorgenti con rendimento superiore al
rendimento della macchina di Carnot che lavora tra le medesime sorgenti:
η ≤ ηc
4
le automobili spostandosi immettono calore nell’atmosfera sotto forma di gas, cosı̀ come tutti gli impianti industriali;
i computer ed i telefoni che usiamo ogni giorno emettono calore nell’ambiente, riflettendoci bene qualsiasi azione facciamo
provoca un surriscaldamento in qualche parte dell’ambiente in cui siamo.
Francesco Saitta, Pordenone Febbraio 2017
136
CAPITOLO 6. TERMODINAMICA
Figura 6.15: Collegamento di una macchina termica di Kelvin-Planck con una macchina non-Clausius
Figura 6.16: Collegamento di una macchina termica di Clausius con una macchina non-Kelvin-Planck
Ogni macchina termica reversibile5 che lavori tra due sorgenti termiche inoltre ha rendimento pari al
rendimento della corrispondente macchina di Carnot:
ηirrev < ηrev = ηc < 1
(6.4.1)
5
definiamo macchina termica reversibile una macchina termica in cui ogni stato del gas è perfettamente conosciuto,
ciclo che quindi può essere percorso in entrambi i sensi (orario ed antiorario nel piano di Clapeyron per esempio).
In generale una macchina reversibile è un’idealizzazione di una macchina termica, che può essere approssimata con
trasformazioni quasi-statiche, ma mai realizzata perfettamente in natura.
Francesco Saitta, Pordenone Febbraio 2017
137
CAPITOLO 6. TERMODINAMICA
Entropia termodinamica
Nel caso della macchina di Carnot (e quindi di una qualsiasi macchina termica reversibile) è interessante
studiare l’uguaglianza tra il rendimento generale in funzione del calore scambiato ed il rendimento
particolare in funzione delle due temperature delle sorgenti:
1−
Tf
Qc
Qa
Qc
=1−
=⇒
=
Qa
Tc
Tc
Tf
(6.4.2)
Questa semplice relazione matematica ci dice come se è vero che la quantità di calore assorbita dalla
sorgente calda è maggiore della quantità di calore ceduta alla sorgente calda (ed è bene che sia cosı̀
da un punto di vista tecnologico, perché genera lavoro meccanico) è altrettanto vero che la quantità
definita dal rapporto tra il calore scambiato e la temperatura della sorgente con cui lo ha scambiato
è una costante. Ecco allora come ad un fisico che osserva questi calcoli viene il dubbio che questa
quantità, che si conserva in un ciclo di Carnot, possa essere una quantità interessante dal punto di
vista termodinamico. Definiamo allora come entropia termodinamica6 la seguente quantità S:
∆S =
Q
T
(6.4.3)
In questo modo possiamo riscrivere l’enunciato di Carnot nel seguente modo:
∆S = 0
(6.4.4)
Ovvero che la variazione di entropia di un gas che subisce un ciclo termodinamico reversibile chiuso è uguale a zero. L’entropia viene definita per differenze: ogni qual volta si scambia
calore con una sorgente ad una certa temperatura avviene una variazione di entropia del gas: aumenta
se il calore è assorbito, diminuisce se il calore è ceduto. L’unità di misura dell’entropia è il rapporto
tra Joule e Kelvin (J/K). È importante ed interessante notare come l’entropia sia una funzione di
stato termodinamica, una funzione che dipende solo dai parametri di stato: in un percorso chiuso
nel piano di Clapeyron infatti la variazione di entropia è nulla, come si può notare dall’equazione
(6.4.2). Questa osservazione è interessante per il calcolo dell’entropia in una data trasformazione: la
sua variazione non dipende dalla serie di trasformazioni che possiamo fare, ma solo dallo stato iniziale
e dallo stato finale del gas. Supponiamo quindi che il gas passi da un generico stato A ad un generico
stato B con una trasformazione reversibile: per calcolare la variazione di entropia del gas non è evidentemente utilizzabile la formula (6.4.3) in quanto gli scambi di calore non avvengono a temperatura
costante. Gli unici due casi semplici sono il caso isotermo appunto in cui si può applicare la formula
ed il caso adiabatico in cui non essendoci scambio di calore l’entropia rimane costante. Nel caso più
generale dal punto di vista concettuale occorre dividere il percorso in moltissimi tratti quasi-statici
per cui sia possibile pensare che il trasferimento di calore avvenga a temperatura costante, e sommare
poi tutti questi contributi; dal punto di vista matematico questo corrisponde a risolvere un integrale
di cui diamo qui solo il risultato:
∆S = S(B) − S(A) =
TB
VB
= ncv ln
+ nR ln
Ti
TA
VA
X Qi
i
(6.4.5)
6
Introdotta per la prima volta da Clausius nel 1864 (Clausius, 1864), che prese spunto da una parola greca che significa
trasformazione per definire una grandezza fisica che egli interpretò come la traccia di ogni trasformazione termodinamica
in natura.
Francesco Saitta, Pordenone Febbraio 2017
138
CAPITOLO 6. TERMODINAMICA
Disuguaglianza di Clausius
Nel caso in cui un ciclo termodinamico non sia reversibile non possiamo calcolare la variazione di
entropia delle trasformazioni del ciclo come sommatoria dei diversi rapporti tra i calori scambiati e
le temperature a cui sono stati scambiati, ma possiamo sempre ottenere una relazione per questa
sommatoria che chiamiamo disuguaglianza di Clausius:
X Qi
i
Ti
<0
(6.4.6)
Entropia di sistemi isolati, universo e morte termica dell’universo
Consideriamo un sistema termodinamico isolato, che non scambia calore con l’esterno, ed immaginiamolo cambiare il suo stato da A a B attraverso una trasformazione reale irreversibile: non possiamo
dunque applicare l’equazione (6.4.5) per calcolare l’eventuale variazione di entropia nella trasformazione considerata. La situazione è schematizzata in figura (6.17). Sicuramente per quanto detto in
Figura 6.17: La zona ombreggiata indica una trasformazione irreversibile, in cui non conosciamo di
preciso lo stato del gas in ogni istante della trasformazione
precedenza vale (6.4.6), che possiamo dividere in due parti:
X X Qi
Qi
+
<0
Ti A→B
Ti B→A
i
i
E, siccome la trasformazione B → A è reversibile il secondo addendo è proprio S(A) − S(B) e si ha
X Qi
+ S(A) − S(B) < 0
Ti A→B
i
ovvero
S(B) − S(A) >
X
i
Francesco Saitta, Pordenone Febbraio 2017
Qi
Ti
A→B
139
CAPITOLO 6. TERMODINAMICA
Ma se il sistema è isolato come da ipotesi significa che il gas non scambia calore con l’esterno e dunque
si ha sempre
S(B) > S(A)
Questo significa che l’entropia di un sistema isolato aumenta sempre, ogni volta che si compie una
trasformazione termodinamica irreversibile al suo interno, e siccome come abbiamo già visto in precedenza se compiamo trasformazioni reversibili l’entropia non varia possiamo dire che In un sistema
termodinamico isolato l’entropia non può mai diminuire, qualsiasi trasformazione accada, ed ogni qual volta si compie una trasformazione irreversibile essa aumenta sempre.
Il sistema isolato che più caratterizza lo studio della fisica e stimola l’intelletto umano è sicuramente
l’universo intero. Con il passare del tempo e lo svolgersi delle trasformazioni irreversibili reali all’interno dell’universo l’entropia tenderà sempre ad aumentare, tutta l’energia tenderà a dissiparsi in calore
e la temperatura ad uniformarsi in tutto lo spazio disponibile: i fisici del tempo previdero cosı̀ la
morte termica dell’universo. In realtà la cosmologia moderna prevede diversi fenomeni ed il futuro
dell’universo non è cosı̀ certo come potrebbe sembrare dal secondo principio della termodinamica.
Espansione libera di un gas
L’esempio più comune che viene fatto di un sistema chiuso in cui l’entropia aumenta è l’espansione
libera di un gas. Immaginiamo di avere un gas all’interno di una stanza di volume fissato isolata
termicamente dal resto dell’universo, all’interno della quale vi è una piccola boccetta di gas che ad
un certo punto viene aperta. Quello che possiamo dire sperimentalmente e dalla nostra esperienza
quotidiana, è che il gas per sua natura si distribuisce nella stanza in modo uniforme, occupando tutto
il volume a sua disposizione. Questa trasformazione si chiama espansione libera in quanto il gas non
scambia calore con l’esterno né compie lavoro sulle pareti della scatola: per il primo principio della
termodinamica non cambia nemmeno la sua energia interna, la sua temperatura finale è quindi uguale alla sua temperatura finale. Nel piano di Clapeyron dunque, pur non conoscendo i dettagli della
trasformazione realmente avvenuta, possiamo dire che i due punti iniziale A e finale B si trovano sulla
stessa curva isoterma alla temperatura TA , come mostrato in figura (6.18). Da quanto detto in prece-
Figura 6.18: Espansione libera di un gas perfetto
denza quindi possiamo calcolare la variazione di entropia del sistema usando la legge (6.4.5) sapendo
che la temperatura finale ed iniziale sono uguali tra loro. A seconda della grandezza della boccetta
Francesco Saitta, Pordenone Febbraio 2017
140
CAPITOLO 6. TERMODINAMICA
dunque ci sarà una certa variazione di entropia del sistema, che sicuramente però sarà positiva7 :
VB
VB
TB
+ nR ln
= nR ln
>0
∆S = ncv ln
TA
VA
VA
Entropia e freccia del tempo
L’entropia spesso viene considerata come freccia del tempo, indicatore della successione degli eventi
che avvengono in natura. Molti fenomeni meccanici sono simmetrici rispetto al tempo: immaginando
di guardare l’urto tra due palline non possiamo pensare di scoprire se stiamo guardando un fenomeno
dal passato verso il futuro o viceversa; guardando un processo termodinamico invece abbiamo il modo
per scoprire la direzione del tempo, dire se stiamo guardando il fenomeno dal passato verso il futuro
o viceversa: se l’entropia sta aumentando il sistema sta evolvendo sicuramente dal passato verso il
futuro! In fisica si parla spesso di questa simmetria (o non simmetria) rispetto al tempo, si parla di
simmetria T : esistono importantissimi teoremi e ricerche di fisica delle particelle che mirano a studiare
la simmetria rispetto al tempo o la sua violazione.
Entropia statistica e disordine
La definizione statistica di entropia fu introdotta da Ludwig Boltzmann8 alla fine del diciannovesimo
secolo (Boltzmann, 1877). L’idea che Boltzmann propose è la seguente: l’entropia di un sistema è
legata alla probabilità che ha un determinato stato di esistere. Questa definizione si è sviluppata nel
contesto della meccanica statistica , trova senso nella descrizione microscopica di un gas e dà origine
al concetto di entropia come disordine. Il significato di disordine che si lega a quello di entropia non
è di senso comune ed è strettamente legato alla meccanica statistica: tanto più la configurazione è
probabile quanto più è disordinata e con entropia elevata. La famosa equazione di Boltzmann è la
seguente
S = k ln(W (A))
(6.4.7)
dove k è la costante di Boltzmann e W (A) è il numero di microstati del gas che generano lo stato
termodinamico A. Possiamo fare un esempio molto semplice e schematico, ma significativo per la
comprensione di questa definizione di entropia. Immaginiamo di avere una scatola con al suo interno
4 particelle di gas ed una parete di separazione nel mezzo della scatola. In figura (6.19) mostriamo le
possibili configurazioni in cui il gas può disporsi nella scatola: lo stato macroscopico con più microstati
che lo definisce è quello in cui ci sono due particelle da una parte e dall’altra; per la statistica è lo
stato più probabile, per la definizione di Boltzmann è lo stato con maggiore entropia, per esperienza
è lo stato in cui un gas tende ad evolvere liberamente, qualsiasi fosse la sua condizione iniziale!
7
Il logaritmo di una quantità maggiore di 1 è sempre positivo
La cui definizione si trova anche incisa sulla tomba dello scienziato austrico a Duino, vicino a Trieste dove si tolse la
vita durante una vacanza nel 1906
8
Francesco Saitta, Pordenone Febbraio 2017
141
CAPITOLO 6. TERMODINAMICA
Figura 6.19: Microstati possibili per 4 particelle in una scatola con due spazi disponibili
Francesco Saitta, Pordenone Febbraio 2017
142
CAPITOLO 6. TERMODINAMICA
6.5
Esercizi
1. Quanto calore è necessario affinché un kilogrammo di ghiaccio alla temperatura T = 250 K
evapori completamente?
[Q = 3, 1 × 106 J]
2. Un litro di gas perfetto raddoppia la sua pressione a temperatura costante, quale sarà il suo
volume alla fine della trasformazione?
[V = 0, 0005 m3 ]
3. Che volume occupa una mole di gas perfetto alla temperatura T = 300 K che si trova alla pressione atmosferica?
[V = 0, 025 m3 ]
4. Di quanto varia in percentuale la temperatura di un gas perfetto durante un’espansione isobara
dal volume iniziale V1 = 5 l al volume finale V2 = 8 l?
[varia del 60%]
5. Un gas perfetto in equilibrio alla pressione atmosferica in un contenitore di volume V = 2 m3 si
trova alla temperatura T = 200 K. Quante moli di gas sono contenute nel contenitore?
[n = 122 mol]
6. Il tappo di una bottiglia da un litro sopporta al massimo una pressione di 50 atmosfere. All’interno della bottiglia si trovano 3 moli di gas perfetto alla temperatura T = 300 K. Il tappo
manterrà la bottiglia chiusa o verrà scoperchiato dalla pressione del gas?
[No, la pressione del gas è P = 74 atm]
7. Ad un cubetto di ghiaccio di massa m = 300 g alla temperatura t = −20◦ vengono fornite
300kcal. Quale sarà la situazione finale del cubetto di ghiaccio?
[Evapora tutto e raggiunge la temperatura t = 358◦ C]
8. Quanta massa di ghiaccio alla temperatura di passaggio di stato verrà fusa con la quantità di
calore necessaria per far evaporare 1 g d’acqua?
[m = 7 g]
9. A che temperatura si troveranno 5 moli di gas perfetto che subiscono una trasformazione isocora
dalla situazione iniziale PA = 3 atm, TA = 200 K fino alla situazione finale in cui PB = 10 atm?
E se le moli di gas fossero state 2, cosa sarebbe cambiato?
[T = 667 K, indipendentemente dalle moli di gas]
10. Si calcoli la quantità di aria (in moli) presente in un’aula scolastica. Si supponga che la stanza
sia larga 5 metri, lunga 6 metri, altra 3 metri, che la pressione sia quella atmosferica e che la
Francesco Saitta, Pordenone Febbraio 2017
143
CAPITOLO 6. TERMODINAMICA
temperatura sia primaverile (t = 23◦ C). Come cambia questo numero d’inverno senza riscaldamento nella stanza (t = 3◦ C)? Si supponga che l’aria che respiriamo sia un gas perfetto.
[n = 3706 mol in primavera; n = 3975 mol in inverno]
11. Si calcoli la velocità quadratica media di una certa quantità di idrogeno molecolare (H2 ) allo
stato gassoso ed alla temperatura T = 300 K.
[vqm = 2500 m/s]
12. Si calcoli l’energia cinetica media di una certa quantità di elio gassoso (He) alla temperatura
T = 0◦ C
[Ēc = 5, 6 × 10−21 J]
13. Che tipo di gas ha, alla temperatura T = 300 K, un’energia cinetica media Ēc = 1, 449×10−20 J?
[Triatomico]
14. Che pressione imprimono sulle pareti del contenitore in cui si trovano 5 moli di un gas monoatomico di densità d = 5 × 10−25 kg/m3 e velocità quadratica media vqm = 1000 m/s?
[P = 5 atm]
15. Un mole di gas monoatomico si trova alla temperatura Ti = 20◦ C. Se un certo macchinario
compie un lavoro L = 100 J sul gas, a quale temperatura si troverà il gas, potendo trascurare
qualsiasi tipo di dispersione?
[T = 301 K]
16. Qual è la temperatura di una mole di gas descritto dal punto (1; 2×104 ) nel Piano di Clapeyron?
Si assumano le unità di misura del SI.
[T = 2407 K]
17. Si studi l’energetica del ciclo termodinamico descritto in figura (6.20). Si assuma n = 3 mol. In
particolare si trovi il lavoro fatto dal gas nel ciclo.
[L = 966 J]
18. Si studi l’energetica del ciclo termodinamico descritto in figura (6.21). Si assuma n = 1 mol. In
particolare si trovi il lavoro fatto dal gas nel ciclo ed il calore assorbito.
[L = 570 J; Q = 2570 J]
19. Quanto calore serve affinché, in una trasformazione isocora, la temperatura di una mole di gas
perfetto monoatomico aumenti la sua temperatura da T1 = 200 K a T2 = 600 K?
[Q = 4986 J]
20. Qual è l’energetica del ciclo termodinamico descritto in un piano di Clapeyron (V (m3 ); P (P a))
da una circonferenza di centro C(3; 30000) e raggio r = 10? In particolare si trovi il lavoro fatto
Francesco Saitta, Pordenone Febbraio 2017
144
CAPITOLO 6. TERMODINAMICA
Figura 6.20: Il ciclo segue la sequenza A → B → C → D
dal gas nel ciclo ed il calore assorbito.
[L = 314 J; Q = 314 J]
21. Si calcoli il rendimento del ciclo termodinamico dell’esercizio (17)
[η = 30%]
22. Si calcoli il rendimento del ciclo termodinamico dell’esercizio (18)
[η = 25%]
23. Si calcoli il lavoro fatto da 5 cicli di una macchina ideale di Carnot dal rendimento ν = 60%,
che assorbe Q = 500 J dalla sorgente calda.
[L = 450 J]
24. Si calcoli la variazione di energia interna di 10 moli di gas perfetto biatomico che subiscono una
trasformazione isobara dallo stato (5; 2) nel piano di Clapeyron (V (l); P (atm)) fino allo stato
(9; 2).
[∆U = 20 J ]
25. Si risolva l’esercizio (24) nel caso in cui il gas sia monoatomico.
[∆U = 1200 J]
26. Si calcoli il lavoro fatto da una mole di gas monoatomico perfetto in un’espansione adiabatica
che triplichi il volume del gas a partire dallo stato (2; 5) nel piano di Clapeyron (V (l); P (atm)).
[L = 791 J]
Francesco Saitta, Pordenone Febbraio 2017
145
CAPITOLO 6. TERMODINAMICA
Figura 6.21: Il ciclo segue la sequenza A → B → C → D
27. Si calcoli la variazione di energia interna di due moli di gas biatomico che passi dalla temperatura
T1 = 200 K alla temperatura T2 = 350 K.
[∆U = 6233 J]
28. Si calcoli il calore ceduto alla sorgente fredda di una macchina di Carnot di rendimento η = 0, 7,
se il lavoro della macchina è pari a L = 500 J.
[Q = 1167 J]
29. Si calcoli il calore assorbito da una mole di gas perfetto che percorra un ciclo definito dal triangolo
ABC nel piano di Clapeyron (V (m3 ); P (P a)) definito da A(2; 20000), B(4; 20000) e C(3; 40000).
[Q = 20000 J]
30. Un cilindro di volume V = 1, 5 m3 chiuso ermeticamente contiene due moli di gas biatomico
alla temperatura T = 300 K. Quale temperatura raggiungerà il gas se dall’esterno si fornisce
Q = 4000 J di calore?
[Tf = 396 K]
31. Si calcoli la variazione di entropia del gas nella trasformazione descritta nel problema (30)
[∆S = 11, 5 J/K]
32. Si calcoli la variazione di entropia di una mole di un gas perfetto monoatomico che si espande
liberamente fino a triplicare il suo volume.
[∆S = 9, 1 J/K]
Francesco Saitta, Pordenone Febbraio 2017
146
CAPITOLO 6. TERMODINAMICA
33. Si calcoli la variazione di entropia dell’universo nello scioglimento di un cubetto di ghiaccio di
massa m = 200 g alla temperatura di fusione messo a contatto con una sorgente a temperatura
Ts = 300 K.
[∆S = 22 J/K]
34. Si calcoli la variazione di entropia di una mole di gas perfetto monoatomico che subisce una trasformazione irreversibile dal punto (2; 6) al punto (3; 4) nel piano di Clapeyron (V (l); P (atm)).
[∆S = 3, 4 J/K]
35. Una macchina di Carnot lavora tra due sorgenti costituite l’una da un enorme blocco di ghiaccio a Tf = 0◦ C, l’altra da un’enorme quantità di acqua in ebollizione. Si calcoli il rendimento
della macchina di Carnot ed il lavoro svolto quando si è fusa una quantità di ghiaccio m = 10 Kg.
[η = 27%; L = 1, 2 × 106 J]
36. Una certa quantità di gas perfetto, inizialmente nello stato con pressione pari a 101 kPa, volume
pari a 25 l e temperatura pari a 300 K, subisce due trasformazioni successive. Dapprima la
temperatura aumenta a pressione constante, raggiungendo il valore di 400 K. Successivamente
la temperatura rimane costante, mentre il volume viene dimezzato. Dopo aver rappresentato le
trasformazioni sul piano di Clapeyron, si determinino i valori finali delle variabili che descrivono
lo stato del gas.
[P3 = 196 kPa; V3 = 17 l; T3 = 400 K, n = 1, 01 mol]
37. Un motore termico di rendimento η = 25% produce 18,3 kJ di lavoro. Quanto calore deve assorbire per svolgere tale lavoro?
[Q = 73200 J]
38. Si calcoli l’aumento di entropia dell’universo quando 10 g di ghiaccio a 273 K sciolgono in 100
kg d’acqua a 293 K. Si supponga che la temperatura dell’acqua rimanga costante.
[∆S = 0, 83 J/K]
39. Un ragazzino lancia una palla di massa m = 200 g con una velocità iniziale v0 = 50 m/s. Di
quanto è aumentata l’entropia nell’universo quando la pallina si ferma dopo il lancio? Si supponga che la temperatura dell’ambiente in cui il ragazzino lancia la palla sia T = 290 K
[∆S = 0, 86 J/K]
40. A un tizio scivola di mano un oggetto di massa m = 2 kg da un’altezza h = 1, 3 m in una giornata
di sole (t = 30◦ C). Di quanto aumenta l’entropia dell’universo quando l’oggetto è caduto a terra?
[∆S = 0, 08 J/K]
41. Describe the energetic balance in a ciclic process ABCD:
• AB adiabatic process: TA = 300K, TB = 400K, VA = 2lt, VB = 1lt
• BC isothermal process: VC = 3lt
Francesco Saitta, Pordenone Febbraio 2017
147
CAPITOLO 6. TERMODINAMICA
• CD adiabatic process
• DA isothermal process
Assume 10 moles of a monoatomic gas. Show the process in the Clapeyron plane.
[L = 34 kJ; Q = 34 kJ]
42. Find the work done by one mole of monoatomic ideal gas in the cycle described in fig.6.22. In
which of these processes the gas gains/yields heat?
Figura 6.22: The cycle follows the sequence A → B → C → A
[L = 1200 J ]
43. Six moles of a biatomic ideal gas changes its state gaining 40J of internal energy and 100J of
heat. What is the amount of work done by the gas? What happens if the gas would be monoatomic instead of biatomic?
[L = 60 J]
44. One mole of a monoatomic ideal gas expands isobarically gaining ∆U = 10J of internal energy.
Assuming that it expansion is ∆V = 10l, what is its pressure?
[P = 667 Pa]
45. Find the work done by one mole of monoatomic ideal gas in the cycle described in fig.6.23. In
which of these processes the gas gains/yields heat?
Francesco Saitta, Pordenone Febbraio 2017
148
CAPITOLO 6. TERMODINAMICA
Figura 6.23: The cycle follows the sequence A → B → C → D → A
[L = 1600 J]
46. One mole of a monoatomic ideal gas at temperature T1 = 230K compresses adiabatically to a
temperature T2 = 300K. Find the work done by the gas. If the gas was initially occupying a
volume V1 = 10m3 , find V2 .
[L = −873 J, V2 = 6.7 m3 ]
47. Ten moles of a monoatomic ideal gas at temperature T1 = 260K, and volume V1 = 20l expands
isobarically to a volume V2 = 40l. Then it is compressed (adiabatically) back to V1 . Finally it
returns to the first state. Draw the cycle in the Clapeyron plane, find the work done by the gas
in the cycle, verifying the first law of thermodynamics.
[L = −16668 J]
48. Find the work done by one mole of monoatomic ideal gas in the cycle described in fig.6.24. In
which of these processes the gas gains/yields heat? Find ∆UA→D .
[L = 520 J,∆UA→D = 300 J]
49. Find the entropy change of three moles of monatomic gas that performs a transformation isobaric starting from (4 l; 2 atm) and doubling its volume.
[∆S = 43 J/K]
Francesco Saitta, Pordenone Febbraio 2017
149
CAPITOLO 6. TERMODINAMICA
isoth.
isoth.
Figura 6.24: The cycle follows the sequence A −−−→ B → C −−−→ D
50. Find the entropy change of two moles of diatomic gas that performs a reversible transformation
from A to B: TA = 200 K, VA = 80 m3 , TB = 400 K and VB = 10 m3 .
[∆S = −5, 8 J/K]
Francesco Saitta, Pordenone Febbraio 2017
150
BIBLIOGRAFIA
Bibliografia
Berkeley G. (1721). De Motu.
Boltzmann L. (1877). Über die Beziehung zwischen dem zweiten Hauptsatz der mechanischen Wärmetheorie und der Wahrscheinlichkeitsrechnung respektive den Sätzen über das Wärmegleichgewicht.
Wiener Berichte, 2(76), 373–435.
Carnot S. (1824). Réflexions sur la puissance motrice du feu et sur les machines propres à développer
cette puissance.
Cavendish H. (1798). Experiments to Determine the Density of the Earth. Philosophical Transactions
of the Royal Society of London, 88, 496–526.
Clausius R. (1864). Abhandlungen über die mechanische Wärmetheorie.
Descartes R. (1644). Principia Phiolosphie.
Euler L. (1765). Theoria motus corporum solidorum seu rigidorum.
Feynman R. P. (2001). La fisica di Feynman.
Galilei G. (1588-1592). De Motu Antiquiora.
Galilei G. (1623). Il saggiatore.
Galilei G. (1632). Dialogo sopra ai due massimi sistemi del mondo.
Galilei G. (1638). Discorsi e dimostrazioni matematiche intorno a due nuove scienze.
Kepler J. (1609). Astronomia nova.
Kepler J. (1619). Harmonice mundi.
Landau L. D.; Lifshitz E. M. (1999a). Fisica Teorica, volume 1.
Landau L. D.; Lifshitz E. M. (1999b). Fisica Teorica, volume 5.
Leibniz G. W. (1849-1863). Mathematische Schriften. herausg. von C.I.Gerardt, Berlino Halle.
Mach E. (1893). The Science of Mechanics - A Critical and Historical Account of its Development.
Newton I. (1687). Philosophiae Naturalis Principia Mathematica.
Francesco Saitta, Pordenone Febbraio 2017
151