Unita’ di misura
1
Lunghezza:il m è la lunghezza che la luce percorre nel vuoto in un tempo pari a: 299 792458 sec
Tempo: il sec. è il tempo necessario alla luce emessa da cesio-133 a effettuare 9192631770 oscillazioni
Massa: Ci si riferisce ad un campione di platinio-iridio conservato e parallelamente si fa uso
dell’atomo di carbonio C-12 (1u=1,6605402·10−27 Kg).
Vettori, un cenno operativo
Distinguiamo subito tra grandezza scalare e vettoriale, laddove la scalare ha solo l’intensita’: i
vettori hanno anche direzione e verso. Naturalmente possiamo compiere l’operazione di somma
collocando i due vettori uno di fianco all’altro.
Importante tenere a mente che possiamo determinare le componenti di un vettore, null’altro che
le sue proiezioni.
q
a
verso: tanϑ = a y
Il vettore a ha componenti ax = acosϑ e a y = asinϑ
modulo: a2x + a2y
x
I versori sono definiti a=ax i+ayj+azk e hanno modulo 1.
Tieni poi conto che è possibile compiere le solite operazioni su piano cartesiano: ad esempio a e
b sono vettori da sommare e r la loro somma rx=ax + b y r y = a y + b y rz = az + bz.
Il prodotto di uno scalare s per un vettore v è un vettore con modulo sv e con direzione la stessa
di v con stesso verso con +s e verso opposto con -s
Distinguiamo poi naturalmente un prodotto scalare e un prodotto vettoriale.
Il prodotto scalare (a·b) è a·b = abcosϑ dove a·b= (ax i+ayj+azk)·(bx i+byj+bzk)
Importante: a·b=b·a
Il prodotto vettoriale (aXb) è un vettore c il cui modulo è c=absinϑ, ortogonale con verso definito dalla regola della regola mano destra dove axb=(ax i+ayj+azk)·(bx i+byj+bz k)
Importante: axb=-(bxa)
Posizione, velocita’, accelerazione
velocita’
Definendo uno spostamento pari a ∆x = x2 − x1 possiamo definire per bene la velocita’.
∆x
Velocita’ vettoriale media (o pendenza media) non dipende da distanza: v̄ = ∆t =
Velocita’ scalare media dipende dalla distanza: ū =
x2 − x1
t2 − t1
lunghezza 1
∆t
Velocita’ istantanea. Naturalmente è un limite del tipo: v =
dx
derivata: dt
∆x
lim
∆t→0 ∆t
e quindi ci portiamo alla
accelerazione
Definendo una variazione di velocita pari a ∆v = v2 − v1 possiamo definiamo l’accelerazione.
∆x
L’accelerazione vettoriale media (o pendenza media) non dipende da distanza: v̄ = ∆t =
dv
Accelerazione istantanea. Anche in questo caso ci portiamo alla derivata: dt =
d ′′v
d ′′t
Definiamio ora le leggi del moto valide soltanto per una accelerazione costante :
1
v2 − v1
t2 − t1
v 2 = v02 + 2a(x − x0)
v = v0 + at
1
x − x0 = v0t + 2 at2
1
1
x − x0 = vt − 2 at2
x − x0 = 2 (v0 + v)t
Vediamo ora i moti composti.
Ricordiamo che il vettore posizione r è r=xi+yj+zk. Il vettore spostamento quindi è dato da:r2r1.Notiamo che possiamo definire un ∆r=(x2 − x1)i+(y2 − y1)j+(z2 − z1)k e quindi dalle definizioni precedenti otteniamo:
∆r
v̄ = ∆ t dove r è naturalmente un vettore
vist. =
ā =
dr
dt
v2-v1
∆t
dv
aist.= dt
=
dx
v =vxi+vyj+vz k con scalari dati da vx= dt
∆v
∆t
dy
vy= dt
dz
vz= dt
dove v ancora una volta è un vettore
a=axi+ayj+azk con scalari dati da ax=
dvx
dt
ay =
dv y
dt
az =
dvz
dt
Moto di un proiettile
E’ un moto in cui si considerano due componenti considerando la velocita’ iniziale v0.
x − x0 = (v0cosϑ0)t
y = (tanθ0)x- 2(v
1
y − y0 = (v0sinϑ0)t − 2 gt2
gx2
0cosϑ0)
2
v y = v0sinϑ0 − gt
v y2 = ( v0sinϑ0)2 − 2g(y − y0 )
viene definita traiettoria. La gittata invece è data da: R =
v02
sin(2ϑ0)
g
Moto circolare uniforme
v2
Il moto circolare descritto ha una accelerazione a con il modulo dato a = r . Naturalmente
avremo una direzione centripeta dell’accelerazione(diretta verso il centro) ed il tempo necessario
2πr
al corpo per completare la traiettoria è definito periodo T= v .
Nota che se consideriamo un corpo in movimento rispetto ad un’altro dovremo considerare la
nostra posizione: infatti la velocita’ osservata è diversa nei due sistemi di riferimento.
Avremo quindi:vpos.A=vpos.B +vBA dove avremo vBA come velocita’ di B rispetto ad A. Ricord
che le due accelerazioni sono uguali apos.A=apos.B .
Leggi di Newton
La F che accelera 1 Kg di 1
m
s2
è una grandezza vettoriale ed ha modulo 1 N.1N=1 Kg
m
s2
Tieni poi conto che le leggi valgono nei sitemi di riferimento inerziali
1 legge. Un corpo nel suo stato di quiete, se non interviene una forza esterna, persiste nel suo
stato
2 legge. C’è una relazione che lega la F e la massa m: F=ma. La forza naturalmente è scomposta nelle sue tre componenti: Fx=max, Fy=may, Fz =maz
3 legge. principio di azione-reazione. FBC=-FCB
Ci sono poi naturalmente delle forze “speciali” che sono Fg =mg (unica direzione verso il basso) e
la forza-peso P=mg. La FN o forza normale è la forza di una superficie sul corpo ad esempio
appoggiato al di sopra.
Riprendendo da prima il moto circolare uniforme e riferendoci ancora una volta alla forza centrimv 2
peta osserviamo che il modulo di questa è definito da F= R : ricorda che i vettori di a e F
hanno direzione verso il centro
attrito
Trattiamo ora la f o forza di attrito, parallela alla superficie e che si oppone al movimento del
corpo: distinguiamo a questo proposito due tipi di attrito.
2
1 Una forza di attrito statico fs che agisce quando il corpo non si muove ed ha la stessa intensita’ di F e con verso opposto-parallelo a questa. Il modulo è fs.mas = µsFN e rappresenta
la “soglia” che deve essere superata dalla F parallela per far muovere il corpo.
2 Forza di attrito dinamico fk che si oppone quando il corpo si muove con intensita’fk = µsFN
Naturalmente non essendo nel vuoto il corpo si nuovera’ affrontando la resistenza del “medium”.
1
In questo caso avremo una forza D di resistenza che avra’ modulo D= 2 C ̺Av2 definendo C il
coefficiente idrodinamico, ̺ la massa idrostatica dell’acqua, A è l’area efficace. Per un corpo in
caduta libera avremo che le due forze, ovvero la gravitazionale e la forza D divengono
inm un
q
preciso istante uguali in modulo e avremo una velocita’ limite la cui intensita’ sara’:
2F g
C ̺A
Lavoro,energia cinetica, potenza
Definiamo l’energia cinetica l’energia accumulata in virtu’ della massa e della velocita’ di un
1
corpo e definita K= 2 mv 2
Definita la F possiamo ora introdurre il concetto di L. Il lavoro è una energia e la definiamo L
(il verso sara’ positivo quando l’energia è trasferita verso il corpo, se trasferita dal corpo con
verso negativo):il lavoro svolto su un corpo da una forza è dato dalla formula:
L=F·d laddove l’intensita’ è Fdcosθ
Abbiamo un angolo ϑ tra F e d: nota che solo la componente di F lungo lo spostamento compie
lavoro utile: se abbiamo piu’ forze avremo da calcolare la somma di tutte le F agenti nelle varie
direzioni. Esiste una relazione tra il lavoro e l’energia cinetica definita da: ∆K = K f − Ki
Alcuni esempi sono :
1.Lavoro compiuto da Fg . In questo caso avremo una unica direzione e la formula:L g =
mgd cosϑ .Naturalmente ϑ sara’ l’angolo tra Fg e d
2. Il lavoro compiuto nel sollevare un corpo: La=-Lg. Avremo una ∆K = K f − Ki=La+Lg
3 Definita una forza elastica F=-kd (legge Hooke) con k costante elastica della molla e d lo
spostamento dell’estremita’ libera„ osserviamo che possiamo “semplificare” il nostro sistema al
solo asse x orizzontale Fx=−kx. A questo punto possiamo introdurre il lavoro svolto dalla molla
1
1
1
definito come Lm= 2 kx2i − 2 kx2f : semplificando il sistema (xi = 0 x f = x) avremo Lm= 2 kx2
4. Se una forza varia di intensita’ nel corso
dovremo
R xf dell’applicazione
R yf
R zf fare uso dell’integrazione
che avverra’ sui tre assi nello spazio: L= x Fxdx + y F ydy + z Fzdz
i
i
i
R x
Anche qui naturalmente se consideriamo solo la componente orizzontale avremo L= x f Fxdx
i
potenza
Quando parliamo di potenza intendiamo il rapido modo in cui viene compiuto un lavoro: anche
L
in questo caso adremo quindi a parlare di potenza media, identificata dalla formula P̄ = ∆t .
Parleremo poi anche di potenza instantanea e ancora una volta quindi avremo a che fare quindi
dL
con il limite, che determinera’ una nuova formula data da: P= dt .
Coinvolgendo poi quindi anche la F vedremo che la formula’ diventera’:P=Fv cosϑ=F·v
Energia potenziale e conservazione dell’energia
L’Energia potenziale è propria della “configurazione” del sistema: ricordiamo che quando viene
compiuto un lavoro da una forza su un sistema abbiamo questo tipo di relazione:
∆U = −L tenendo conto che la variazione di energia potenziale sara’ data da:
R xf
∆U = − xi F (x)dx .
3
Affronteremo ora il ripasso di alcune forme di energia potenziale:
Potenziale gravitazionale. ∆U = mg(y f − yi) = mg∆y. Semplificando a cooridinate:U (y) = mgy
1
Potenziale elastica. Ricordando la molla con forza F=-kx avremo U = 2 kx2
Energia meccanica. Rappresenta l’unione delle due ovvero: Emec = K + U . Tieni a mente il
principio di conservazione dell’Energia:
conservazione dell’energia
L = ∆Emec = ∆k + ∆U = 0.
Questo naturalmente vale se non si considera la forza di attrito dinamico, nel qual caso la formula precedente subira’ una modifica in:
L = ∆Emec + ∆Eth
dove ∆Eth = fkd
Approfondiamo ancora la cosa definendo ora il principio di conservazione dell’energia:
L = ∆Emec + ∆Eth + ∆Eint
in un sistema isolato poi avremo 0 = ∆Emec + ∆Eth + ∆Eint
Definiamo quindi una funzione energia potenziale U (x): la forza che determina la variazione di
U (x) è data da:
F (x) = −
dU (x)
dx
Tieni poi a mente che l’energia cinetica viene definita K(x) = Emec − U (x): c’è la presenza di un
punto di inversione in cui K=0. Abbiamo quindi equilibrio quando la pendenza nel grafico di
U(x) è uguale a zero.
potenza
Riprendiamo poi il concetto di potenza definendola come P̄ =
∆E
,
∆t
dE
al limite avremo P= dt
Sistemi di corpi
Finora abbiamo trattato il corpo singolo, estendiamo il concetto
definendo, in un sistema di par1 Pn
ticelle, un centro di massa con precise coordinate è rcdm= M i=1 miri con componenti:
1 Pn
1 Pn
1 Pn
ycdm= M i=1 miyi
zcdm= M i=1 mizi
xcdm= M i=1 mixi
Quando applichiamo una forza ad un sistema di punti materiali otterremo la formula data:
Fnet=M acdm
dove M è la massa totale del sistema
Quantita’ di moto e urti
Se definiamo poi anche una p ovvero quantita’ di moto per una singola particella data dalla formula p=mv e riscriviamo la seconda legge di Newton in funzione della quantita’ di moto avremo
la formula F=dp/dt.
Estendiamo il tutto a un insieme di corpi (un “sistema” di particelle) e avremo:
P=M vcdm
e Fnet=dP/dt
Parleremo ora di impulso quanto il sistema subira’ una variazione della quantita’ di moto:
p f -pi=∆p=J
4
Possiamo ora compiere una integrazione nello spazio della forza che viene esercitatae determina
appunto un impulso:
R t
J= t f F(t)dt
i
Se siamo in una sola dimensione naturalmente si riduce il sistema a: J = F̄ (t)dt.
Un caso particolare si ha quando abbiamo una fila corpi di massa uguale che vanno a collidere
un corpo “bersaglio”:
n
n
J = F̄ (t)dt=- ∆t ∆p=- ∆t m∆v
Poniamo a mente inoltre che
nella massa
n
∆t
ovvero F̄ =
∆m
∆t
· ∆v
è la frequenza d’urto dei corpi, una vera e propria variazione
∆v è la variazione di velocita’ che avviene a carico di ogni corpo che incide e coincide con −v in
caso di arresto dei corpi o con -2v in caso di rimbalzo.
Naturalmente la quantita’ di moto P sara’ costante in un sistema ideale, isolato, e avremo naturalmente P f =Pi .
Se due corpi si scontrano avremo poi quindi la conservazione della quantita’ di moto totale in un
urto anelastico, ovvero quando:
p1,i+p2,i=p1,f +p2, f
Se il sistema è in una sola dimensione possiamo avere:
m1v1,i + m2v2,i=m1v1,i + m2v2,i
Quando invece abbiamo un urto elastico, l’energia cinetica tra due corpi non varia a seguito
dell’urto, vi è una perfetta trasmissione:
m1v1,i=m1v1,f + m2v2,f (quantita’ moto)
1
1
m v2 = m v2
2 1 1,i 2 1 1, f
1
2
+ 2 m2v2,
f (energia cinetica)
Riarrangiando abbiamo le formule:
m −m
v1,f = m1 + m2 v1,i
1
v2, f = m
2
2m1
1 + m2
v1,i
Teniamo ora in considerazione delle estensioni
Se estendiamo il nostro ragionamento a due dimensioni vedremo che avremo:
p1,i+p2,i=p1, f +p2,f
Scomponibile nei due assi x, y. Naturalmente in caso di urto elastico la conservazione
dell’energia fornira’ K1,i + K2,1 = K1, f + K2, f
Un sistema a massa variabile per esempio è un razzo. In questo caso avremo quindi:
R u = M a [M massa istantanea, R ritmo di scarico, u velocita’ di emissione relativa al propulsore] .
R ·u viene definita spinta generata dal propulsore e se i due termini sono costanti si avra’:
M
v f − vi = uln M i
f
Moto di rotazione
s
Preliminare a qualsiasi formula è naturalmente la definizione di posizione angolare ϑ = r laddove
abbiamo una lunghezza dell’arco che sottende un angolo ϑ. Naturalmente lo spostamento angolare sara’ dato da ∆ϑ = ϑ2 − ϑ1.
Siamo quindi pronti per “rivisitare” alcune formule del moto rellineo in “chiave” circolare.
Velocita’ angolare (media). Viene definita da ω̄ =
∆ϑ
:
∆t
5
eseguendo poi il limite avremo ω =
dϑ
dt
Accelerazione angolare. Viene definita da a ᾱ =
∆ω
:
∆t
eseguendo poi il limite avremo α =
dω
dt
Ecco che le formule della cinematica del moto rettilineo vengono di pari pari adattate al moto
circolare:
ω 2 = ω02 + 2a(ω − ω0)
ω = ω0 + at
1
1
ω − ω0 = ω0t + 2 at2
ω − ω0 = 2 (ω0 + ω)t
1
ω − ω0 = ωt − 2 αt2
Analizziamo ora il vettore v velocita’ e a accelerazione: il vettore velocita’ è tangente alla circonferenza e il vettore accelerazione ha due componenti, una è la componente tangenziale e una
quella radiale.
v2
Definiamo la componente tangenziale at = α r e la radiale ar = r = ω 2r, laddove abbiamo
rad
l’ampiezza α del modulo data da sec2 . Nel moto circolare uniforme il periodo T è dato quindi
2πr
2π
da: v = ω
Energia cinetica. L’energia cinetica K di un corpo attorno ad un asse fisso è data da:
1
K = 2 Iω 2 dove I è il momento di inerzia
P
Il momento di inerzia è quindi esteso a tutti i corpi
miri2. Se si tratta di un
R 2puntiformi: I =
corpo con massa continua avremo la formula I = r dm.
Il teorema di Huygens-Steiner poi definisce: I = Icdm + M h2. Esso mette in relazione l’asse passante per il centro di massa con un asse qualsiasi.
La forza e il momento.Il momento tau è proprio dato dall’azione della forza F: essa è applicata in un punto e viene definito dal vettore di posizione r rispetto all’asse. Infatti il vettore
momento risponde alla regola della mano destra ed è definito da:rxF Naturalmente andremo poi
a definire l’intensita’, il modulo del momento:
τ = rFt laddove possiamo poi ridefinire con r⊥ F = rF sinϑ
(poni attenzione alle componenti, troveremo anche piu’ avanti una simile conversione: F ha due
componenti ovvero una F⊥ perpendicolare, la sola che ha valore, a r e una F= parallela a r.
Ricorda inoltre la regola di due rette tagliate da una trasversale che forma angoli alterni interni
uguali e opposti al vertice uguali...)
Nota che abbiamo sostituito la componente r con la componente r⊥ e ϑ
Indaghiamo ora la “forma” della seconda legge di Newton applicata al moto circolare:
τnet = I · α laddove I è il momento di inerzia e α è l’accelerazione angolare
R ϑ
dL
dϑ
Di seguito quindi poi definiamo il lavoro come L= ϑ f τ dϑ P = dt = τ dt = τ · ω
i
Nota che se t è costante avremo poi l’equazione L = τ (ϑ f − ϑi)
1
1
Il passo successivo è di definire l’energia cinetica come L = 2 Iω 2f − 2 Iωi2 = K f − Ki
Moto di rotazione sul piano
Notiamo che una sfera che rotola su un piano inclinato avra’ una vcdm = ωR e naturalmente possiamo definire una energia cinetica che tiene conto anche della componente M data da:
1
1
2
Iω 2 + 2 IMvcdm
2
L’accelerazione del centro di massa sara’ data da:acdm = αR e quindi acdm,x = −
Momento angolare di una particella
6
g sinϑ
1+
Icdm
(M R2)
.
Consideriamo ora un corpo puntiforme: in questo caso avremo una “rivisitazione” del momento
angolare gia visto, questa volta lo applichiamo un un punto (regola mano destra).
Il momento angolare è un vettore a tre dimensioni definito da l=rxp=m(rxv). Quel che a noi
interessa è calcolare il modulo, la componente efficacie che determina il movimento. Al solito:
l = rm v sinϑ
l = rp⊥ = rmv⊥
poi posso ridefinire le componenti in : l = r⊥ mv
Ovviamente poi andremo ad adattare la seconda legge di Newton definendola come:
taunet=dl/dt
ricordando che L = l1 + l2
+ ln
e quindi taunet=dL/dt
Nota che la componente del momento angolare parallela all’asse è: L = I · ω. Inoltre il momento
angolare L rimane costante se il momento totale netto delle forze esterne che agiscono è zero.
Equilibrio
Un corpo si dice in equilibrio statico se la somma delle forze che agiscono sul corpo è nulla:
Fnet=0 con le componenti su piano x y pari a 0. Anche la taunet=0 e nella fattispecie, essendo
tutte le forze sul piano xy avremo τnet = 0
Forza di gravita’ e leggi di keplero
La legge di gravitazione di Newton è una forza F=G
m1m2
r2
G=6, 67 · 10−11
Nm2
kg2
P
Notiamo che le forze agiscono sul punto per sovrapposizione essendo F1,net= ni=2 F1,i essndo
questa la somma vettoriale delle forze esercitate sulla particella 1 dalle altre n-sime.
Se le dimensioni
R non sono puntiformi dobbiamo per forza “coprire’ la superficie con un integrale
dato da F1= dF
Definiamo poi la forza F=m ·a g
laddove G
m1m2
r2
= m ·ag
ovvero a g =
GM
r2
distinzione tra accelerazione di gravita’ e g
Se abbastanza nota è la differenza che sussiste tra massa e peso, dobbiamo fare una piccola puntualizzazione di relazione tra ag e g (ricordiamo che F=mag ). Infatti la g è diversa dalla a g e la
m m
forza-peso data da mg è diversa dalla F=G r1 2 2 : la terra infatti non è perfettamente sferica.
Ben diverso il caso in cui abbiamo una particella all’interno di una sfera: in questo caso avremo
4πr 3
una forza gravitazionale data dalla formula Mint = ̺ 3 .
Estendiamo il nostro ragionamento anche osservando che è presente una energia potenziale graGMm
vitazionale U = − r comulativa ovvero se abbiamo piu’ particelle avremo
U = −(
G m1 m2
r12
+
Gm1 m3
r13
+−
Gm2 m3
)
r23
Se un corpo deve essere distaccato dall’attrazione esercitata da un altroqcorpo se avremo un
2GM
valore di velocita’ uguale o superiore alla cosiddetta “velocita’ di fuga”: v =
R
moto di satellite
Il moto di un satellite che si muove su orbita circolare avra’ una U = −
G Mm
r
K=
G Mm
2r
Fluidi
Partiamo dal presupposto che la massa di un fluido in modalita’ puntiforme ha una densita’
data dalla formula:
∆m
̺ ∆V
m
passando a un campione con massa maggiore rispetto all’atomico avremo: ̺ V
La forza di un fluido che viene esercitata su un altro corpo(pareti, etc...) è data dalla formula
F
∆F
della pressione p = ∆A e in condizioni di uniformita’ di forza e superficie possiamo avere p = A .
7
Consideriamo ora una porzione di fluido ad una data altezza:qui avremo F2 = F1 + mg secondo
la legge di Newton. Con opportune sostituzioni e utilizzando la relazione tra massa e densita’
avremo che:
p2 = p1 + ̺g(y1 − y2)
p = p0 + ρgh [alla stessa profondita’ avro’ la stessa pressione]
Un breve accenno al principio di Pascal per ricordare che una qualsiasi variazione di pressioen
viene trasmessa dal fluido al contenitore. Al passo ricordiamo anche il principio di Archimede
(caso particolare delle leggi di Newton): FA è in modulo uguale a FA = m fg con naturalmente
uan nota relativa al peso apparente di un corpo dato da Papp = P − FA.
Se il nostro fluido è non viscoso, con flusso laminare e non ha vorticosita’ possaimo descirvere un
tubetto di flusso con un fascio di linee di flusso, in questo caso definiremo la portata di volume
come:
RV = A·v
formula derivata da A1v1 = A2v2 [equazione di continuita]
Da notare che l’equazione di continuita’ ha un bell’esempio nel caso in cui utilizziamo un tubo
flessibile per innaffiare: se lo stringiamo all’estremita per portare il getto piu’ lontano avre_1mo
un aumento di velocita’ del flusso d’acqua. Ovviamente l’unita’ di misura per la portata volumem3
trica sara’ sec . Avremo poi anche una portata di massa definita da: Rm = ̺RV
bernoulli
Ora studiamo accenniamo ad un fluido in movimento, in cui viene applicato il principio di conservazione dell’energia ai fluidi appunto: se in un qualche punto del percorso di un fluido in
stato “laminare” vi è una variazione di velocita’, allora la pressione deve diminuire:
1
1
p1 + 2 ̺v12 + ̺gy1 = p2 + 2 ̺v22 + ̺gy2
Se infatti andiamo a porre v1=v2 l’equazione di bernoulli andra’ a coincidere con l’equazione
vista precedentemente: p2 = p1 + ̺g(y1 − y2). Se inoltre poniamo la variazione di altezza uguale
1
1
a zero avremo una riduzione dell’equazione in: p1 + 2 ̺v12 = p2 + 2 ̺v22.
Oscillazioni, suono e onde
Iniziamo il nostro studio fornendo la definizione di frequenza: 1Hz=1 oscillazione al secondo.
1
Il periodo in cui si verifica una oscillazione completa è dato da: T = ν .
moto armonico
Iniziamo con il porre le basi dello studio definendo il moto armonico: esso risponde ad una funzione periodica che ben lo descrive.
La posizione viene definita dall’equazione:
x(t) = xm(ωt + φ) [xm = ampiezza, φ = costante di fase, ω la pulsazione (ω =
x ′(t) = v(t) = −ωxmsin(ωt + φ)
2π
)]
T
in cui avremo ωxm ampiezza della velocita’
′′
x (t) = a(t) = −ω2xmcos(ωt + φ) in cuia avremo ω2xm ampiezza dell’accelerazione
Possiamo poi anche proiettare sul diametro di una circonferenza il vettore di posizione,velocita’
e accelarazione del moto armonico semplice ottenere un moto circolare uniforme.
Adattiamo ora il tutto ad un sistema a molla
(F=-kx): avremo
q come visto nella legge di hooke
q
k
m
in questo caso una pulsazione data da ω = m e un periodo dato da T = 2π k .
Ancora una volta “traduciamo” nel linguaggio dell’oscillatore il principio di conservazione
dell’energia:
E =K +U
1
1
E = 2 mv 2 + 2 kx2
8
Forniamo ora alcuni periodi di pendoli:
T = 2π
q
I
k
T = 2π
q
L
g
T = 2π
q
l
m gh
effetti sul moto armonico
Gli effetti sul moto armonico da parte di agenti esterni convertono parte dell’energia meccanica
in energia termica: se esiste una forza F che smorza il moto circolare, di intensita’ Fsm = −bv
avremo:
d2x
dx
−bv −kx = ma e riscrivendo tutto in funzione di x: m dt2 + b d t + kx = 0 da cui avremo:
q
bt
bt
k
b2
1
−
−
x(t) = xme 2m cos(ωsmt + φ) [pulsazione ωsm = m − 4m2 Energia≈ 2 kx2me m ]
onde
Le onde sono ascritte a tre tipologie fondamentali, ovvero le one meccaniche, elettromagnetiche
che non richiedono un mezzo materiale e con una propagazione c = 299 792 458 m/sec e onde di
materia (elettroni, protoni ...). Possiamo avere una diffusione in modo trasversale (una corda
tesa all’estremita’) o longitudinale (esempio un pistone oscillante in un tubo d’aria che comprime ed espande lo spazio all’interno).
La funzione onda sinusoidale è data da: y(x, t) = ymsin(kx − ωt) [ ω pulsazione, kx − ωt fase]
Il k o numero d’onda angolare è correlato a λ con la formula k =
2π
λ
1
ω
e ν = T = 2π v =
ω
k
λ
= T = λν
Estendendo il nostro studio osserviamo che l’equazione generale di un’onda è data da:
y(x, t) = h(kx ± ωt)
seconda legge di newton per le onde
La seconda legge di Newton viene estrapolata con qualche semplice passaggio trigonometrico e
vengono considerate le componenti verticali che si sommano lungo una corda:
F=2τ sinϑ = q
τ 2ϑ = τ
τ
avremo: v = µ
∆l
R
v2
usando poi la a= R e µ∆l(massa corda nel punto) e combinando le tre
energia in onda sinusoidale
1
L’energia cinetica dK che è abbinata ad un punto della corda sara’ dK= 2 dmu2
Se allo stadio successivo facciamo la derivata parziale della y(x, t) = ymsin(kx − ωt) avremo:
u=
∂y
∂t
= −ωymcos(kx − ωt) [ posto dm = µ dx] avremo poi
dK
dt
1
2
= 2 µvω 2 ym
cos2 (kx − ωt)
1
2
e quindi con un po’ di passaggi saremo in grado di esprimere la P̄ = 2 µvω 2 ym
forze e equazione d’onda
Al solito il nostro scopo è andare a scovare la seconda legge di Newton nel sistema in esame: a
questo proposito trattiamo una porzione di corda attraversata da un’onda sinusoidale. Viene
generata una accelerazione dalle due forze opposte uguale in modulo a F2y − F1y = dm a y . Nota
F2y
= S2 e le
che è importante scomporre la F2 nella F2y e nella Fq
2x, laddove avremo pendenza F
2x
componenti sono legate a F2-τ dalla relazione : τ =
1 ∂2y
∂ 2y
quindi: ∂ 2x2 = v2 ∂t2
2
2
. L’equazione d’onda diventera’
F2x
+ F2y
sovrapposizione e interferenza
Si ha poi sovrapposizione di onde quando:y ′(x, t) = y1(x, t) + y2(x, t) mentre l’interferenza
avviene tra due onde di equazioni:
y1(x, t) = ymsin(kx − ωt) e y1(x, t) = ymsin(kx − ωt + φ)
9
Sommandole secondo una semplice formula trigonometrica avremo:
1
1
y ′(x, t) = [2ymcos( 2 φ)]sin(kx − ωt + 2 φ) dove l’ampiezza è monomio nella parentesi quadra.
rappresentazione semplificata
Possiamo rappresentare un’onda usanto il vettore di fase con modulo ym e naturalmente utilizzare l’angolo φ per l’angolo di rotazione del vettore sul piano cartesiano: varranno naturalmente
le solite regole algebriche di somma e differenza tra vettori (regola del parallelogrammo).
stazionarieta’
Nella nostra analisi ora ci imbattiamo in quelle denominate onde stazionarie: esse sono generate
dalla sovrapposizione di onde con stesso modulo e stessa frequenza. Anche qui, applicando la
stessa relazione trigonometrica vista prima avremo:
y ′(x, t) = ymsin(kx − ωt) + ymsin(kx + ωt)
y ′(x, t) = [2ymsin(kx)]cos(ωt)
Analizziamo un attimino il termine 2ymsin(kx):
a) Avra’ valore nullo quando kx = nπ . con k =
2π
λ
1
λ
x=n2
1
b) Avra’ valore massimo 2y quando kx = 2 π...=(n + 2 )π
Evidenziamo inoltre il fatto che nel caso di una corda di lunghezza L avremo una relazione con
nλ
la lunghezza d’onda data da: L = 2 laddove n indica l’armonica (1,2...)
acustica
Utilizziamo la seconda legge di Newton per osservare che cosa accade quando uno strato (
volume A∆x e massa ρA∆x =ρA∆tvvel)d’aria entra n una zona piu’ compressa a velocita’ v in
quello che chiamiamo impulso:
∆v
F = pA − (p + ∆p)A
Nota che
∆V
V
=
A∆v∆t
A v∆t
=
−∆pA =ρA∆tvvel ∆t
∆p
ρv 2 = − ∆v =B
v
∆v
v
L’ultima formula è la velocita’ del suono.
L’onda sonora è una serie di compressioni e espansioni in sequenza periodica, pertanto un elemento x oscilla a sinistra e destra - spostamento s- secondo un moto armonico semplice attorno
all’asse di equilibrio:
s(x, t) = smcos(kx − ωt)
Quindi poi avremo:
∆p
=-B
∆V (=A∆s)
V (=A∆x)
Facciamo ora la sostituzione:
∂s
∂x
sm è lo spotamento massimo
∂s
facendo la derivata parziale ∆p = −B ∂x
= −ksmsin(kx − ωt) con ∆p = Bksm(kx − ωt)
Ecco quindi che la pressione dell’aria in ogni punto aumenta e diminuisce secondo una sinusoide
data da: ∆p = Bksm(kx − ωt) e naturalmente avremo una ampiezza di pressione
∆pm = (Bk )s m=(v 2 ̺k)sm
onde acustiche in interferenza
Essendo una diff. di fase 2π uguale a 1λ avremo che la differenza di cammino è in relazione alla
differenza di fase secondo:
φ
2π
=
∆L
λ
φ=
∆L
2π
λ
10
quindi vi sara’ una interferenza costruttiva quando φ = m(2π), interferenza distruttiva per
(2m + 1)π = φ
Negli strumenti musicali a fiato avremo poi λ =
2L
n
(estremita’ aperte)
λ=
4L
n
estremita ′ chiuse
Definiamo poi i battimenti ovvero la somma di due onde con la stessa ampiezza:
s = s1 + s2 = sm[(cos (ω1t) + cos (ω2t)] e quindi con la regola trigonometrica:
1
1
s = 2smcos[ 2 (ω1 − ω2)t]cos[ 2 (ω1 + ω2)t] ,
valori +1 o -1 e quindi ωbatt = 2ω ′
2smcos(ω ′t)cos(ωt) ampiezza andra’ al massimo con
il suono
P
Ps
e
4πr 2
I
beta = log I
0
L’intensita’ del suono è fornita dall’equazione: I= A =
′
data da y = log10x con y = log10 + log x = 1 + y
l’intensita’ della scala in decibel è
energia del suono
Al solito cerchiamo come si “esprime” l’energia
1
1
∂s
dK = 2 dmvs2 e avremo: 2 ρAdxω 2sin2(kx − ωt) [ ∂t = −ω 2sin2(kx − ωt)]
1
dK 1
Divido ora per il tempo: dt 2 ρAvω2sin2 (kx − ωt) = 4 ρAvω 2s2m
dK
1
I=2 dT
= 2 ρvω 2s2m
A
doppler e mach
Nella condizione normale avremo: ν =
vt
λ
t
v
=λ
v ±v
L’equazione generale dell’effetto doppler è ν ′ = ν v ∓ vr laddove avremo appunto una variazione a
s
carico della frequenza emessa e della frequenza generata e i casi in cui la sorgente si muove
oppure il rivelatore si muove, nonche’ il movimento che va incontro alla sorgente oppure che si
allontana.
Caso a parte quando si raggiunge la velocita’ del suono, in questo caso l’angolo di mach sara’:
vt
st
in cui abbiamo appunto la vs = velocita ′ del suono
sinϑ = v
Termodinamica
La temperatura nel punto triplo dell’acqua è data dalla relazione:T = (273, 16K)(limgas→0
notiamo che portandoci a massa 0 avremo la temperatura di 273,16 K per tutti i gas.
p
):
p3
Ricordiamo le leggi della dilatazione :∆l = lα∆t ∆V = Vβ∆t β = 3α relazione che lega il coefficiente di dilatazione lineare al coefficiente di dilatazione volumetrica.
cal
Q=C∆t = C(T f − Ti)
C = C0
cal
Q = cm(T f − Ti) c = gC 0
Q= L f /v · m
LF =
cal
g
L’equazione dell’espansione è data da: dL=F·ds . Il modulo è dato da: pAds
L=
R
Vf
V1
dL
Prima legge della termodinamica:∆E(non dipende dal percorso seguito) = Q − L e passando ai
differenziali per le condizioni controllate dE = dQ − dL
L è positivo se il sistema si espande, invece è negativo se si contrae: il lavoro è compiuto dal
sistema quando L è positivo mentre è compiuto sul sistema quando L è neativo.
11
∆Eint = −L adiabatica,
∆Eint = Q isocora
Q
T
-Pc (conduzione) è uguale a:
A(T1 − T2)
avremo: P
.
l
= kA
T1 − T2
l
Q = L cicliche
Q=L=0 libera espansione
e con piu’ strati
naturalmente
k
W
-Pr (convezione) è uguale a: σεAT4 [ σ = 5, 6703 · 10−8 (m2 · K 4) ] Pa (assorbita) è σεAT4amb
Gas
Numero di numero di Avogadro: atomi o molecole in una mole sono 6.02 · 1023 mol−1
Il numero di molecole in un campione è quindi Nmolecole=nmoli · NA
J
8, 31
R
Un gas ideale avra’ PV = nRT con R = 8, 31 (mol K)
J
costante di Boltzmann: N = 6, 02 · 10molK
23mol −1
A
Sottoponiamo il gas a varie situazioni:
1) Espansione isoterma: pV=nRT
L=
Pressione di un gas, la cinetica
R
Vi
Vf
nRT
dV
V
V
L = nR Tln Vf isoterma
i
Andiamo ancora una volta a “scovare” la seconda legge di Newton in un gas contenuto in box:
Cambio della quantita’ di moto è dato da: ∆px = (−mvx) − (mvx) = −2mvx
∆px
∆t
=
2mvx
2l
vx
=
2
mvx
l
Naturalmente avremo il contributo dato dall’impatto di tutte le molecole:
2
q
P mvx
i
3RT
nMv2
nMv 2
p = l2 l = V x = 3V ove abbiamo v¯2 =velocita ′ quadratica media [ M ]
1
1
La cinetica sara’ :K̄ = 2 mv 2 = 2 m
3RT
M
3R T
= 2N
A
3
K̄ = 2 kT
Una molecola si muove e avremo il cammino libero medio:
λ= √
λ=
1
N
2πd2 V
inversamente proporzionale a diametro e numero molecole
v ∆t (lungh.cammino)
N
πd2v∆t V (collisioni in cilindro)
Maxwell trovo’ la distribuzione delle velocita’. E’ una funzione di distribuzione di probabilita’.
v2
3
R ∞
R ∞
−M (2RT) ′′
M
sezioni ′′P dv che integrate 0 P (v)dv = 1 v̄ = 0 vP(v)dv
P (v) = 4π( 2πRT ) 2 v 2e
Introducendo la P(v) nell’integrale avremo:
q
q
R ∞
R ∞
8R T
3RT
2
v̄ = o vP (v)dv =
v
=
vP
(v)dv
=
o
πM
M
vp =
q
2RT
M
calore specifico
3
3
L’energia interna di un gas è data da (nNA)K̄ = nNA 2 kT = 2 nRT cioè dipende sono dalla temperatura. Il calore specifico è legato alla ∆t secondo Q = nCV ∆T .
volume costante (L=0)
∆Eint + L = Q = nCV ∆T
3
[∆Eint = 2 nR∆t]
3
J
con Cv = 2 R = 12, 5 molK calore specifico molare
Percio’ l’Eint = nCvT un’altra espressione dell’ Eint
pressione costante
∆Eint = Q − L
con un po’ di sostituzioni: nCV ∆T =nCP ∆T + nR∆t
12
Ora approfondinamo per un attimo il discorso relativo alla rotazione della molecola e quindi il
collegamento tra calore specifico e gradi di liberta’: notiamo che ogni molecola ha un numero f di
1
gradi di liberta’ (1, abbinato a una energia di 2 kT per molecola.
3
f
f
Quindi Eint = 2 nRT = 2 nRT = 2 R = 4, 16f
J
mol K
Se un gas è dentro un recipiente e togliamo un pallino alla volta da un pistoncino che lo tiene
compresso nella cameretta avremo sia una diminuzione di pressione che di volume (adiabasi).
C
Con una serie di riarrangiamenti si puo’ dimostrare che: p1V1ϑ = p2V2ϑ theta dato da Cp
V
Attenzione che l’espansione libera è un tipo particolare di adiabatica in cui p1V1 = p2V2
entropia
∆S = S f − Si =
R
f dQ
i
T
1
se compiamo una espansione isoterma: S f − Si = T
R
f dQ
i
=
Q
T
F QT̄
Si definisce variabile o funzione di stato dipendendo dallo stato iniziale e finale:ora pero’ dobbiamo essere in grado di “controllare” il sistema, cosa che puo’ avvenire soltanto con il suddividere il processo in piccoli “step”:
dQ − dL = dEint
dQ = pdV + nCV dT
S f − Si = nRln
Vf
Vi
con qualche passaggio:
T
+ nCV ln Tf
i
La seconda legge della termodinamica indica che l’entropia deve sempre rimanere constate o
diminuire: per questo motivo consideriamo una estensione del sistema, che comprende un serbatoio di calore, una sorgente.
∆Sgas = −
|Q|
T
e ∆Ssorg = +
|Q|
T
macchina di carnot
Possiamo parlare ora di rendimento in una macchina ideale che lavora tra due temperature, a
ciclo di Carnot, laddove abbiamo due adiabatiche e due isoterme di ciclo continuo: il calore viene
rilasciato entra come Q1 dalla alla T1 e esce come Q2 alla T2:
L = |Q1|−|Q2|
Il rendimento è η =
|L|(lavoro ottenuto)
|Q1|(energia usata )
ηc =
|Q1|−|Q2|
|Q1|
∆S = ∆S1 + ∆S2 =
|Q1|
T1
−
|Q2
T2
ed è ideale, i motori reali sono invece molto meno efficienti (25% contro i 55% terorici se fossero
macchine di carnot).
Una nota sul motore di stirling:il lavoro viene compiuto con un ciclo che consiste di due isoterme
collegate da due isocore (e non da due adiabatiche)
macchine frigorifere
Un frigorifero ideale trasferisce tutto il calore dalla sorgente fredda alla calda senza che vi siano
fenomeni di dispersione
Il rendimento è ε =
|Q2|(energia utile)
L(energia usata )
εc = |Q
|Q2|
|Q|
∆S = ∆S1 + ∆S2 = − T +
1|−|Q2|
1
|Q|
T1
cambiamo ora prospettiva e utlizziamo il calcolo combinatorio: supponiamo di avere n molecole
N!
di gas, avremo molteplicita’:W = n !n ! ovvero numero di microstati che aumentano man
1 2
manoche aumentano le molecole e quindi entropia piu’ alta man mano che aumentano i microstati: S=klnW, l’equazione di Boltzmann, incisa sulla sua tomba.
elettricita’, cariche, campi
1
Iniziamo col definire la forza di Coulomb (modulo):F = 4πε
13
0
|q1||q2|
r2
analoga alla forza di gravita’
1
[k= 4πε = 8, 99109
0
N ·m2
C2
ε0 = 8, 85 · 10−12
C2
]
N · m2
]
Non dimentichiamo che F è un vettore e le forze agiranno indipendentemente e sommandosi, su
una particella
La carica ha caratte quantico ovvero q = ne n = ±1, ±2, ±3
. e = 1, 602X10−19Coulomb
campi
Partiamo dal presupposto che il campo elettrico è dato da un vettore:E=F/q0. Esso puo’ essere
generato in vari modi. Un elenco in basso
1
1)La carica puntiforme genera un campo : F = 4πε
1
2)Dipolo: F = 4πε
0
q
2
r+
1
− 4πε
0
q
r 2−
1
= F = 4πε
q
0
1
(z − d d)2
0
−
|q |
r2
1
q
1
q
; 4πε
0z
4πε0(z + d d)2
2
2d
z
q
= 4πε
0z
2
2d
z
p
= 2πε
0z
3
nota che abbiamo due cariche a distanza “d” che determinano un campo elettrico diverso
R 2πr
λ ds(pezzettino di cerchio)
1 dq
dEcosϑ
=
;
dE
=
;
3)Cerchio:dE
=
4πε0 r 2
0
4πε0(z 2 + R2)(pitagora)
R
2πr
zλ
zλ(2πr)
è equazione di anello
ds =
E=
3
3
0
4πε0(z 2 + R2) 2
4πε0(z 2 + R2) 2
carico
una estensione puo’ essere fatta se abbiamo un disco: in questo caso avremo una carica
dq = σdA = σ(2πr)dr
zσ(2πr)d r
3
4πε0(z 2 + R2) 2
[integrale] .E = 2ε (1 − √
σ
0
z
z 2 + R2
)
Analizziamo ora cosa accade a una carica in un campo elettrico ed un dipolo
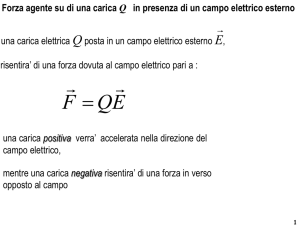
F=qE
Un dipolo ha torsione (forza utile τ = rF sinφ
τ = Fd sinϑ = qE(p/q)sinϑ=pxE
R ϑ
Naturalmente la sua energia potenziale U=-L=- 90 pE sinϑdϑ = −pEcosϑ U=-pxE
gauss
Consideriamo ora il flusso di un campo elettrico che passa su un un oggetto:
Φ = (vcosϑ)A è il flusso utile perpendicolare che passa attreverso una superficie: naturalmente
se la linea del campo elettri è radente avremo flusso nullo
H
P
PHI= E·DELTA(A)= E dA su una intera superficie
superfici
H
quindi qint = ε0 E ·dA
1)carica puntiforme
Facciamo l’esempio con una carica che genera una sfera: inquesto caso possiamo semplificare il
tutto dato che E ha sempre lo stesso valore e quindi:
H
q = ε0E dA
q=ε0E(4πr 2) legge Colulomb
2)superficie conduttore .Tieni conto che una carica fornita a un conduttore isolato si porta tutta
sulla superficie esterna:non c’è carica all’interno! Supponiamo di pigliare un sezioncina sulla
superficie in cui passa il flusso quindi: ε0E A = σA (dove σA è la porzioncina di superficie c)
σ
E= ε
0
3) Bachetta che da’ origine ad un “cilindro” di carica esterna, campo E perpendicolare
Φ = EAcosϑ = E(2πrh)cos0
[ε0Φ = qint]
ε0E(2πrh) = λh
14
λ
E = 2πε
0r
H
4)simmetria piana. Prendiamo il solito cilindretto che trapassa la superficie:ε0 E dA=qint
ε0(EA + EA) = σA
5) doppia piastra. Una carica + sui due lati, la seconda carica - sui due lati. Avvicinate si
2σ
attraggono le cariche e il flusso del campo è solo all’interno. E = ε 1
0
1 q
4πε0 r2
6)sfera a carica uniforme. Ricorda se abbiamo un “anello” di carica:E =
q
interno). Ora pero’ supponiamo di avere una sfera “piena”: E=( 4πε R3 )r
(E=0 se
0
tensione elettrica
Supponiamo di voler spostare una carica da un punto in cui non abbiamo energia potenziale.
Il lavoro compiuto è U=−L∞ [Ui = 0]
V=
U
q
∆V = V f − Vi = −
L∞
q
J
[V= C ]
1,60·10 −19C
(1 J/C)
Infatti l’eV (elettronvolt) è l’energia associata per spostare la carica di 1V:
La variazione di energia cinetica sara’ dunque uguale a 0:
∆K = Lapp + L ( Lapp si alla carica che stiamo spostando ). Lapp = −L
Lapp = q∆V
movimento di una carica in un flusso elettrico
Una carica, un dipolo generano linee di forza: i piani che le tagliano in punti che hanno gli stessi
potenziali determinano superfici equipotenziali.
Ora spostiamo una carica lungo le linee di forza: fara’ un percorso che suddivideremo in trattini
R f
R f
infinitesimi:dL = Fds
L=q0 i Eds
V=- i Eds. Avremo vari casi.
1) Carica puntiforme. Il caso piu’ semplice è quando abbiamo E·ds=Ecosϑds
R ∞
1 q
1 R ∞ 1
1 q
V f − Vi = − R E dr
[E = 4πε r2 ]
0 − V = − 4πε R r2 dr = 4πε r
0
1
q
2) Dipolo. V=V+ + V− = 4πε ( r +
0
+
1
3) Carica su linea. dV = 4πε
−q
q r −r
) = 4πε −r r +
r−
− +
0
dq [=(λdx)]
0
r
[=(x2 + d2)1/2]
′
1
4) Disco carico. dV = 4πε
0
0
qi
1 Pn
i=1 ri
4πε0
0
V=
qd cosϑ
4πε0r 2
λ
(carica puntiforme). V = 4πε ln[
0
L + (L2 + d2)1/2
]
d
′
dq [=σ(2πR )(dR )]
p
r
z 2 + R ′2
Il lavoro compiuto su una carica che si sposta tra le superfici equi-potenziali è:
∆V
−q0dV = q0E (cosϑ) ds naturalmente avremo poi Es = − ∆s . Lavoro su carica di prova
L’energia potenziale è determinata avvicinando due cariche opposte: il lavoro viene esercitato
1 q q
per avvicinarle, l’energia potenziale poi si tramuta in cinetica:V = 4πε 1r 2
0
Inoltre dalla legge di Gauss sappiamo che un conduttore all’interno ha E=0 quindi:
R f
V f − Vi = − i E·ds
Tipi di condensator e
1)Hcondensatore piano.La capacita’ elettrica di un condensatore si rifa’ alla legge di Gauss: qint =
ε0 E ·dA (ricavato con il cilindretto che attraversa la superficie).
R +
Nel caso particolare avremo: q = ε0EA
V = − E ds = Ed [ponendo un punto 0 di partenza]
Quindi avremo: q = CV
[1F =
1C
]
1V
C=
ε0A
d
ε0 = 8, 85 · 10−12
2) condensatore a cilindro.
q = ε0EA=ε0E(2πrL)
V=
3) condensatore sferico.
q = ε0E =ε0E(4πr 2)
V=
15
R
R
+
−
E ds = 2πε
+
−
Eds = − 4πε
q
0L
q
R
0
R
F
m
a dr
b r
b dr
a r2
q
= 2πε
0L
=
a
ln( b )
Per i condensatori in parallelo avremo poi:Ceq =
lavoro e energia potenziale del condensatore
Pn
J =1
C j e per quelli in serie:
1
Ceq
=
1
J =1 C j
Pn
Il lavoro che deve essere compiuto per portare una carica ad un valore finale q è quindi:
R
q2
1
U
CV2
1
q2
1R q
U = 2C = 2 CV 2
[ u = A d = 2A d ]
u = 2 ε0E 2
L = dL = C 0 q ′dq ′ = 2C
A
C = εrε0 · superficie( ad esempio = d )
H
Un dielettrico indebolisce il campo elettrico perche’ le cariche si ridistribuiscono: ε0 εrE dA=q
resistenza, corrente, potenza
q=
R
dq =
R
i
0
i dt
1A =
1C
s
R=V/i
1 Ω=1 V/A
Definiamo ora la velocità del flusso di elettroni J=(ne)vd
Passiamo poi a definire la resistivita’: ̺ =
E
J
1
conduc. σ = ̺ o vettoriale E=̺J
J=σE
L
La resistenza è la diretta derivata della resistivita’:R = ̺ A e dipende dalla T.
Attenzione anche alla legge di Ohm che indica che la corrente che scorre attraverso un dispositivo è proporzionale alla differenza di potenziale:è vero solo in alcune aree del grafico i/V :
m
quindi F = ma = eE/m
con vd = at quindi ̺ = e2nt P = iV
I semicoduttori nonostante abbiano molti meno portatori di carica , hanno coefficiente di resistivita’ che diminuisce al crescere della temperatura
dL
A questo punto dobbiamo avere una pompa di cariche, f.e.m. = dq e i=
f .e.m.
R
circuiti a una maglia
In un circuito elettrico la somma algebrica delle differenze di potenziale è nulla (kirkho) quindi
se passiamo attraverso una resistenza la variazione di potenziale è −iR, l’opposto invece è +iR.
La f.e.m. sara’ +f.e.m. se vado nella direzione, - f.e.m se vado nella direzione opposta. Nota che
il potenziale, ovvero la P f .e.m. = i · FEM
Inoltre se abbiamo le resistenze messe in serie ci sara’:Req = R1 + R2 + R3
La differenza di potenziale tra due punti è: Vb − Va = i R e così la applico per trovare la differenza di potenziale agli estremi della batteria.
circuiti a piu maglie
La legge che governa il tutto è la legge di kirchchoff o dei nodi: la corrente che entra in un nodo
è uguale alla corrente che esce da questo, inoltre ricorda che le resistenze in parallelo possono
1
1
1
essere sostuite con una resistenza equivalente: R = R + R 1
eq
2
RC circuit
Supponiamo di avere un circuito semplice, con una maglia definito da 3 componenti(F.E.M., rsistenza e condensatore):
q
fem-iR − C = 0
q
fem=iR + C
fem
R
=
dq
dt
q
+ RC
Per le soluzioni della terza equazione differenziale abbiamo la forma generale:
q = q p + Ke−at che posta alle condizioni iniziali ci dara’ la carica/scarica del condensatore.
t
1) Carica del condensatore:
q = C∗(F .E.M .)∗(1 − e
2) Scarica del condensatore:
q = q0e
t
− RC
− RC
)
i=
dq
dt
t
=
q
F .E.M . − RC
e
R
0
i = − RC
e
16
t
− RC
campi magnetici
La forza del campo magnetico è perpendicolare ai vettori B e v che descrivono un angolo φ:la
forza del campo magnetico è perpendicolare alla velocita’ v e al campo magnetico attraversato.
Nota che abbiamo la forza verso l’alto con caric positiva e verso il basso con carica negativa.
FE =Eq
FB =qvxB
modulo FB = |q|vB sinφ
N
N
Tesla= coulomb · m = A · m
1 gauss è 10−4tesla
sec
campo elettrico e magnetico :relazione
Per calcolare il rapporto m/q di un elettrone supponiamo di avere
ora un
campo E
e un campo
magnetico B perpendicolari in cui le forze si controbilancino: qE = qv Bsinφ=qv B
v=
E
B
m
|q|
B 2L2
= 2y E come dimostro’ Thomson. lL’effetto Hall invece ci indica che in ua lamina di
rame in cui c’ì un flusso di elettroni , se applichiamo un campo magntico, avremo una deflessione: l’accumulo di carica generera’ un campo elettrico che fa ra’ spostare gli elettroni dalla
parte opposta secondo una differenza di potenziale:V = Ed (d è la larghezza).
Quindi: eE=evdB
i
vd = n eA A è l’area e n il numero i portatori di carica
Ora soffermiamoci sul moto circolare di una carica, naturalmente avremo una forza:
|q|B
m v2
qvB = r con adattata la seconda legge di Newton. e quindi ω = 2πν = m
Avremo una traiettoria elicoidale quando la v ha attive entrambe le componenti vettoriali nel
campo magnetico B (nei casi precedenti l’angolo φ era 90 gradi)
Pensiamo ora al funzionamento di un ciclotrone in cui |q |B = 2πνosci che è la condizione di risonanza: attenzione che oltre la velocita’ della luce non funziona piu’ la meccanica classica e
quindi la legge deve essere rivista.
“generatori di campi magnetici’ ’
L
Un filo attraversato da corrente ha q = i ( v ) FB = qvdB sinφ = iLB
d
FB =iLxB è la generalizzazione di un filo se si muove nel campo con modulo:FB = i LBsinφ.
Non solo: se il filo non è circolare dobbiamo ricorrere al differenziale dFB =i·dLxB
Una spira che viene percorsa dalla corrente in un campo magnetico ha quatto forze che agiscono: avviene una torsione per far allineare n perpendicolare alla spira con il campo magnetico.
1) I lati nimori “b” della spira rettangolare hanno modulo F2 = ib Bcosϑ eF3 opposto a questo e si
annullano, non danno torsione.
2) I lati maggiori “a” hanno modulo iaB: c’ è un momento torcente che fa allineare la spira perpendicolarmente al campo magnetico B. Le due forze avranno modulo:
b
b
τ ′ = iaB 2 sinϑ + iaB 2 sinϑ
τ =NiaBsinϑ con N spire
abbiamo ora realizzato un dipolo magnetico in cui τ = [Nia]µBsinϑ generalizzata tau=muxB
(analoga tau=pxE del dipolo elettrico).
Naturalmente abbiamo una energia potenziale U(ϑ) data da: -mu·B (modulo −µB cos ϑ). In
questo caso osserveremo il coseno e quindi a -180 gradi avremo energia massima e minima a 0
gradi
corrente in un filo che determina un campo magnetico
Se abbiamo un filo percorsoda una corrente i possiamo considerare una piccola sezioncina ds:
m
µ i ds sinϑ
µ0 = 4π · 10−7T · A
ovviamente il vettore dB è entrante dB= 4π0 r2
17
µ
Generalizzando nello spazio avremo: dB=( 4π0 )(idsxr)r 3
fili e campi magnetici
Il filo rettilineo puo’ essere integrato come:
R ∞
µ i R ∞ sinϑds
µ0i
B = 2 0 dB = 2π0 0
... B = 4πR
r2
nel caso di una curvatura avremo :
dB =
µ0i i ds sin900
R2
4π
=
µ0i ds
4π R2
B=
R
dB =
R
φ µ0iR dφ
0
4π R2
I fili poi possono essere paralleli e avremo: BA =
avvicinamento sara’ vettoriale:
µ0ia
2πd
=
µ0iφ R φ
4πR 0
dφ
naturalmente si avvicineranno e la forza di
Fba=ibLxBa e quindi avremo Fba = ib LBasin 90 = ib L
µ0ia
2πd
ampere: la legge dal filo singolo al solenoide
Supponiamo di avere dei fili entranti ed uscenti perpendicolari al piano: in questo caso possiamo
compiere una integrazione delimitata circolarmente:
H
H
Bds=µ0ich = B cosϑds = µ0ich
In questo caso, a differenza dei casi precedenti, abbiamo correnti non parallele al piano:naturalmente ora sara’ il verso del vettore campo magnetico B parallelo e cambiera anche il prodotto,
avremo un coseno.
H
Esploriamo ora il campo magnetico fuori il filo: in questo caso:B ds = B(2πr) B(2πr) = µ0i
πr 2
... e dentro il filo, considerando un “cerchio” interno al filo: B(2πr) = µ0i πR2
Passiamo poi al solenoide, un avvolgimento di fili: per l’analisi considereremo un rettangolo che
ne attraversa la superficie:
H
R b
R c
Bds= a Bds+ b Bds la nostra ich = inh (n numero di spire eh la lunghezza) Bh = µ0inh
poi chiudiamo il solenoide e otterremo un torus con campo dato da:
B (2πr) = µ0iN (N sono le spire)
Passiamo ora a trattare una bobina in cui abbiamo gia’ visto tau=muxB momento di dipolo,
modulo NiA (N numero spire, i corrente e A l’area).
Analizziamo le due componenti del vettore B della bobina (una perpendicolare, l’altra parallela):
µ
dB= 4π0
i ds sin900
R2
µ
componente dBparal. = 4π0
i cos α ds
R2
[ cos α =
R
r
=√
R
R2 + z 2
] B(z) =
µ0
iR2
2 (R2 + z 2)3/2
legge di induzione
Si scoprì molto tempo fa che avvicinando un magnete ad una spira, si genera corrente:
R
φB = BdA
φB = BA un caso particolare weber: 1T·m2 e quindi si generera’ una forza
elettromotrice f.e.m=−
dφA
dt
con N spire avremo quindi: −N
dφA
dt
Quando si avvicina il magnete alla spira si induce un momento di dipolo mu che va ad opporsi
all’entrata del magnete: il funzionamento è alla base della chitarra elettrica. Esso si oppone in
ogni modo ovvero, se il magnete si allontana avremo Bindotto nello stesso verso del Bgenerante,
se invece il campo magnetico si avvicina avremo il Bindotto che ha verso opposto quando B
aumenta.
Trattiamo ora l’energia associata all’induzione: supponiamo di avere un circuito rettangolare in
cui passa dall’alto al basso il campo magnetico. Naturalemente si generera’ una P=Fv
18
La f.e.m. sara’ uguale a andranno ad annullarsi.
dφB
dt
dBLx
dt
=
dx
= BL dt
allora i =
BLV
R
Le due forze perpendicolari quindi
Ricavando la solita equazione: Fd=iLxB avremo che F=F1=iLB sin90=iLB
F=
B 2L2v
R
P=Fv
Quindi è di facile intuizione che il campo magnetico che varia generi un campo elettrico:
R
H
H
H
dφ
Fds=q0E(2πr) L= F·ds=q0 E·ds
E·ds=- - dtB
induttanza
Il nuovo componente che andremo ad analizzare è l’induttanza che è regolata dallla legge:
L=
N ΦB
i
Henry=1T·m2/A se abbiamo un solenoide l’induttanza sara’ data da
NΦB = (nl)BA =
(nl)(µ0in)A
i
L
l
= µ0 n2A µ0 = 4π10−7T ·
m
A
Possiamo poi anche avere auto-induzione che determina una f.e.m.L (attenzione!):
f .e.mL = −
d(N ΦB )
dt
di
f .e.mL = −L dt
Al solito se abbiamo una corrente che entra in aumento la f.e.m autoindotta tende a contrastare
l’aumento di corrente, se la corrente diminuisce invece la f.e.m. autoindotta avra’ verso opposto.
Chiaramente all’inizio l’induttanza contrasta la corrente, poi si comporta come un filo di conduzione.
RL circuit
di
Supponiamo di avere i tre componenti in serie: −iR − L dt + f .e.m = 0 (kirkhoff I) in analogia ad
f .e.m
f .e.m.
f .e.m.
un circuito RC avremo quindi:i = R (1 − e−Rt/L) τL = L/R i = R (1 − e−1) = 0, 63 R
Passiamo poi ad analizzare l’energia abbinata ad un campo magnetico
R EL
R i
di
dE
di
di
dEL= 0 Lidi
f.e.m.=iR+L dt (f.e.m)i=i2R + Li dt l’energia sara’: dtl = Li d t
0
1
EL = 2 Li2
q2
Ricorda quella del condensatore:EC = 2C
Possiamo poi analizzare la densita’ di energia magnetica mediante:
uL =
1
EL
Al
EL = 2 Li2 uL =
L i2
l 2A
B2
1
= 2 µ0n2i2
1
confrontala con uC = 2 ε0E 2
uL = 2µ
0
N2Φ21
i1
Possiamo poi avere anche mutua induttanza con M21 =
con due f.e.m che saranno: −M
di1
dt
e −M
e quindi M21 = M12
di12
dt
circuiti piu’ complessi
LC
Analizziamo quello che accade in un circuito con induttanza e candensatore: l’energia si conserva
e abbiamo una pulsazione
1 q2
1
Ec = 2 2C e EL = 2 Li2
1
dE
dt
[vc = C q, vr = Ri]
1
=
d( 2 Li2 +
dt
1 q2
)
2 C
di
d2 q
q dq
Ecco che l’oscillazione elettrica in analogoia con oscillazione meccanica viene data da:
q = Q cos (ωt + ϕ)
dq
(i) = −ωQ sin (ωt +
dt
ϕ) e
Con opportune sostituzioni ottengo l’impulso: ω = √
d2 q
dt2
= −ω 2 Q cos (ωt + φ)
1
LC
1 Q2cos2(ωt + ϕ)
2C
e le oscillazioni date da: Ec = 2
1
EL = 2 Lω 2 Q2sin2(ωt + ϕ) ω = √
LCR (oscillazioni smorzate)
19
1
= Li d t + C d t = L dt2 + C q
1
LC
d2 q
1
dq
Introducendo una resistenza l’equazione diverra’:L d t2 + C q + R d t circuito
p
La q sara’ data da Qe(−Rt/2L)cos(ω ′t + φ) con un ω ′ dato da
ω 2 − [R/(2L)]2
oscillazioni forzate
Un trasformatore produce corrente alternata: in pratica abbiamo la rotazione di una spira che
conduce corrente, in un campo magnetico e possiamo applicarla in un circuito RLC per appunto
fornire oscillazioni forzate
la f.e.m nella spira sara’ data da f .e.mmsin(ω gt) mentre la corrente i = I sin (ω gt − ϕ)
in questo modo avremo:
1) Carico resistivo.(ϕ = 0) vr = Vrsin(ωgt) ir =
Vrsin(ω gt)
=i = Ir sin (ω gt −
R
2) Carico di condens.(ϕ = +900) vc = Vcsin(ωgt) ic =
di
3) Carico indut.(ϕ = −900) vL=L dtl
ϕ) uguagliando Vr = IrR
1
d qc
dt
= ω gCVccos(ωgt) [Xc = ω C ] Vc = IcXc
g
R
VL
VL
diL
= L sin(ωgt) iL = diL = −( ω L )cos(ω gt) VL = ILXL
dt
g
... mettiamo in serie i tre componenti
e avremo f .e.m=f .e.mmsin(ω gt) con una corrente i = I sin ((ωgt − ϕ) naturalmente avremo a
livello del condensatore un anticipo sulla tensione di 90gradi, e a livello di induttanza un uguale
ritardo. I è l’ampiezza della corrente.
ampiezza di corrente, fase e risonanza
f .e.m2 = VR2 + (VL − VC )2 I = p
tanϕ =
VL − VC
VR
=
IXL − IXC
R
f .e.mm
R2 + (XL − XC )2
Z=
p
R2 + (XL − XC )2 I =
la risonanza è massima quando ωgL = ω
f .e.mm
p
R2 + [ω gL − 1/ω gC]2
1
gC
trattazione dell’alternatore
Trattiamo ancora l’alternatore e ricaviamone la potenza:
1
V
2
P = i2R = [I sin ((ω gt − ϕ) ]2R . Il seno al quadrato è 1/2 P̄ = 2 I 2R ; P̄ = Iqm
R ; Vqm = √ f .e.m
2
da cui, dopo una serie di passaggi algebrici avro’:
P̄ = f .e.m.qmIqmcosϕ con angolo 0 quando ho un circuito con la sola resistenza e naturalmente un
trasformatore sara’ideale quando avro’ f .e.m = f .e.mqmsin(ωt): lo schema è il il seguente.
1) Maglia con alternatore(VP e spire NP che avvolgono il magnete)
2)Magnete di trasformazione che genera appunto il campo induttivo
3) Maglia in cui si genera corrente (VS e spire NS che avvolgono il magnete)
in cui avremo un VP di un circuito che avvolte con NP
Ecco quindi che possiamno trasformare la tensione mediante la VS = VP
unificazione
NS
NP
se NS >NP elevera ′
H
dφ
Ricordiamo che la legge di induzione fondamentale è Bds=+µ0ε0 dtE + µ0ich che si riduce
alla legge di Ampere quando il primo termine è zero, ovvero quando non c’è variazione di corrente.
H
Quindi:è Bds=µ0is + µ0ich e naturalmente il campo magnetico è indotto:
µ0is
µ0is
(esterno au una distanza r)
B = 2πR
B = 2πr
2 r (interno ad un condensatore)
[!quantistica!]
Trattiamo ora il campo magnetico associato ad un elettrone, che consiste di due componenti:
20
e
h
e
1)momento di spin.mu.spin=− m S [Sz = ms 2π ms = ±1/2] µs,z = − m Sz
eh
µs,z = ± 4πm Sz
L’energia potenziale associata ad un elettrone in un campo magnetico è data da U=−µs,zBext
e
h
e
eh
2)momnto orbitale.mu.orb=− 2m L [Lz = ml 2π ml = ±1/2] µorb,z = − 2m Lz µs,z = −ml 4πm
L’energia potenziale associata ad un è inoltre data da U=−µorb,zBext
e
e
3) Orbita.µorb = iA [i = 2πr/v ] µorb = i 2πr/v πr 2 =
e vr
2
e
[l=m(rxv) L=mrv]] mu=- 2m Lorb
propagazione di un onda, energia e pressione esercitata
L’andamento del campo magnetico ed elettrico è un’onda data da:
E = Emsin(kx − ωt) e B = Bmsin(kx − ωt)
Trattiamo il differenziale contemporaneto del campo elettrico e magnetico, otterremo quindi:
H
dΦ
dB
∂B
∂E
E ds=- dtB
(E + d E)h − E h = −h dx dt
= kEmcos(k x − ωt) = − ∂t =
∂x
+ ωBmcos(kx − ωt)
H
dΦ
dE
∂E
∂B
B ds=µ0ε0 dtE −(B + d B)h − B h = h dx dt µ0ε0 ∂t = −µ0ε0ωEmcos(k x − ωt) = − ∂x =
− kBmcos(mkx − ωt)
E
1
da cui c= B m c = √ε
M
0 µ0
L’energia associata S (
potenza
)ist
area
La pressione sara’ ∆p =
2∆U
c
1
1
1
1
2
sara’ S = µ EB I = S̄ = cµ Ē 2 I = cµ Eqm
uE = 2 ε0(cB)2
pr =
0
0
0
2I
c
Ottica
polarizzazione, riflessione e rifrazione
1
Consideriamo la polarizzazione:vedremo che avremo dimizzamentoI= 2 I0 E y = E cosϑ I = I0cos2ϑ
Se consideriamo un raggio che incide su un medium diverso dalla sorgente troveremo che avremo
un angolo theta di riflessione e di rifrazione (nel medium)
L’angolo di riflessione sara’ ϑ1′ = ϑ1 e l’angolo di rifrazione sara’:n1sinϑ1 = n2sinϑ2 in cui con il
n
rapporto n1 posso avere variazione dell’angolo o meno. Nota poi che vi puo’ essere una disper2
sione acromatica se abbiamo piu’ componenti.
Posta una sorgente all’interno, nel passare all’esterno avremo, in base all’angolo, questa progressione andra’ :
a)totale trasmissione b)riflessione+rifrazione(n1sinϑ1 = n2sinϑ2),rilessione totalen1sinϑ1 = n2sinϑ2
Nota che l’acqua quando riflette la luce, la polarizza, mentre la luce rifratta possiede le due ocmponenti di cui pero’ la perpendicolare viene attenuata.
Secondo la legge di Brewster n1sinϑB = n2sin(90 − ϑB )
n1sinϑB = n2sin(90 − ϑB )
specchi
Uno specchio piatto dara’ i=-p mentre uno specchio curvo avra’ caratteristiche ben diverse in
termini di produzione di immagine virtuale: se lo specchio è infatti concavo avremo una immaine
virtuale che si allontana e si ingrandisce, mentre se lo specchio è convesso l’immagine virtuale se
rimpicciolisce e si avvicina.
In uno specchio concavo la luce parallela viene concentrata in un fuoco F posto dove vi sono i
raggi incidenti, mentre per uno specchio convesso la luce sembra divergere da un fuoco virtuale
F posto all’interno della lente.
21
Nel caso di uno specchio concavo abbiamo tre casi in relazione alla posizione dell’oggetto:
1) Tra fuoco e lente: avro’ una immagine virtuale I dietro lo specchio con stesso orientamento
2) Nel fuoco: avro’ immagine indefinita
3) A sinistra del fuoco: avro’ una immagine capovolta davanti allo specchio.
Relazione che sussiste facendo uso di relazioni trigonometriche :
1
p(distanza dell ′oggetto dallo specchio)
1
1
+ i(distanza dell ′immagine dallo specchio) = f (distanza focale)
Avremo un ingrandimento trasversale m prodotto dallo specchio
(h è dimensione trasversale
h′
i
dell’oggetto e h’ è dimensione trasversale dell’immagine):m= h m = − p
Mediante opportune costruzioni geometriche si ricava il valore di m precedente
rifrazione
Definiti due mezzi n1 e n2 con diversi indici di rifrazione (esempio vetro in aria), notiamo che le
immagini reali si formano nel mezzo diverso da quello in cui si trova l’oggetto, mentre le immagini virtuali (date dai prolungamenti) si formano dalla stessa parte.
Facendo uso della legge di rifrazione vista avremo:
n1
p
n2
i
+
=
n2 − n1
r
Ecco che mediante queste leggi possiamo andare ad esplorare le lenti sottili: le flessione del
raggio incidente è doppia e avviene perche’ il suo indice di rifrazione è diverso da quello del
medium in cui è immersa.
Le leggi che regolano il tutto sono:
1
p
1
1
1
f
+i=f
1
1
= (n − 1)( r − r )
1
2
) Lenti convergenti formano immagine reale (non dalla parte dell’oggetto) con O prima di fuoco
[Posizione O - F - Lente ]
2) Lenti convergenti formano immagine virtuale (dalla parte dell’oggetto) con O tra F e lente
[Posizione F - O - Lente ]
3) Lenti divergenti formano sempre immagini virtuali
Mediante le lenti sottili si possono costruire vari dispositivi di ingrandimento
Una lente sottile semplice posta dinanzi a un oggetto posizionato prima di F da’ immagine virtuale lontana [ posizione F - O - Lente ]. Naturalmente avremo un rapporto:
m=
′
ϑ(angolo
immagine virtuale)
ϑ( angolo senza lente)
ϑ′ =
h
f
mϑ =
25 cm
f
Nel caso di un microscopio ho la combinazione di due soluzioni contemporanee:
1) La prima consiste nella disposizione: O-F1-Lenteobiettivo. Si forma immagine I e raggio
incrocia l’asse in punto F2 posto prima di F1′ sull’asse
2) La reale I formata è nella disposizione: F1′-I-Lenteoculare. Si forma una virtuale ingrandita
dalla stessa parte dell’oggetto O.
I virtuale −
O −− F − −Ob. − −−F − −F −I −Oc. − occhio
f ob. /−f − /−S − /−f /
1
′
1
2
ob
oc
Ecco che possiamo variare la distanza tra obiettivo ed oculare e naturalmente avremo che
l’ingrandimento è dato dalla combinazione delle 2 leggi :
M = mmϑ=−
s
Fob
25
Foc
22
Anche il telescopio è costruito in modo analogo ma in questo caso F2 coincide con F1′ e la disposizione sara’:
I virtuale −
O −− −−Ob. − −−F + F + I −−Oc. − occhio
f /////////−f −
′
2
ob
m=−
fob
foc
oc
interferenza e diffrazione
Secondo la teoria di huygens abbiamo dei fronti d’onda e dovremo, per le nostre analisi, considerare la tangente relativa a questi:supponiamo di avere un’onda che va dall’aria ad un nuovo
medium, per esempio il vetro. In questo caso avremo:
λ1
λ2
v
= v1
2
λ
λ
c
sinϑ1 = h 1c sinϑ2 = h 2c [indice rifrazione n = v ]
sinϑ1
sinϑ2
=
Passiamo ora a trattare la differenza di fase.
c
n1
c
n2
La differenza di fase tra due onde si modifica passando da un medium ad un altro, non
cambia la frequenza.
v
λn = λ c
1
v
L
L
[ n = c v = λν ] νn = ν N1 = λ
n1
N2 = λ
n2
Se consideriamo
( un’onda incidente su una doppia fenditura dalla trigonomentria osserviamo che
dsinϑ = mλ
massimi
∆L = d sinϑ
1
dsinϑ = (m + 2 )λ minimi
E quindi avremo cambiamenti di fase percorrendo cammini con lunghezza diversa
Analizzando le due onde nella loro componente elettrica vedremo che:
E1 = E0sin(ωt) E2 = E0sin(ωt + φ)
Dalla trigonometria possiamo comporre i i due vettori E1 E2 sfasati di un angolo φ:
1
1
I
E2
1
E = 2(E0cosβ) = 2E0cos( 2 φ) E 2 = 4E02cos2( 2 φ) [ I = E 2 ] intensita ′: I = 4I0cos2( 2 φ)
0
0
Ancora dalla trigonometria otterremo una differenza di fase pari a: φ =
2πd
sinϑ
λ
Tieni poi conto del fatto che la differenza di fase tra due onde si modifica se abbiamo
riflessione.
Nel caso in cui le onde incidono su una pellicola avremo tutte e tre step:
Onda r1 incide e con riflessione avremo una differenza di fase di mezza lunghezza d’onda
Onda r2 compie doppio cammino 2L: per essere in fase con r1 dobbiamo avere 2L =
λ
ndisp.
λn2
2
Onda r2 attraversa lamina con indice rifrazione n2 [λn2 = n ]
2
1 λ
così: 2L = m + 2 n in caso di lamina costruttiva
2
Una curiosita’ . Si puo’ esprimere la lunghezza di un oggetto mediante la sua lunghezza: lo fe ce
Michelson utilizzando una fonte, uno specchio di trasmissione e riflessione che fa incide l’onda
su:
1)Uno specchio mobile totalmente riflettente che fa variare il numero di lunghezza d’onda
2)Uno specchio totalmente riflettente cui posso apporre lamine con vari indici di riflessioneù
In questo modo posso “giocare” con le lunghezze d’onda in termini di inice di rifrazione e variazioni di lunghezza d’onda.
23