Fluidodinamica
dei processi astrofisici
Introduzione all’Astrofisica
AA 2014/2015
Prof. Alessandro Marconi
Dipartimento di Fisica e Astronomia
Università di Firenze
Dispense e presentazioni disponibili all’indirizzo
http://www.arcetri.astro.it/„marconi
Ultimo aggiornamento: 6 novembre 2014
1
Equazioni della fluidodinamica
Equazione di conservazione della massa
Bρ ~
` ∇ ¨ pρ~v q “ 0
Bt
(1)
~
B~v
∇p
1
` p~v ¨ ∇q~v “ ´
` F~ext
Bt
ρ
ρ
(2)
Equazione di moto
Se siamo in un campo gravitazionale
~
F~ext “ ´ρ∇φ
(3)
~
B~v
∇p
~
` p~v ¨ ∇q~v “ ´
´ ∇φ
Bt
ρ
(4)
se il campo è generato dalla stessa massa del fluido,
∇2 φ “ 4πGρ
(5)
Nel caso ~v “ 0 ritroviamo l’equazione dell’equilibrio idrostatico.
Queste equazioni sono scritte in notazione Euleriana, ovvero consideriamo
una posizione nello spazio ~r e guardiamo come variano le grandezze fisiche
in ~r al variare del tempo.
Esiste anche la notazione Lagrangiana in cui si segue il moto di un ben
definito volumetto di fluido (particella fluida) e si osservano le variazioni
delle grandezze fisiche che lo caratterizzano: si individua la particella fluida
alla posizione ~r0 al tempo t0 e se specifica la posizione in funzione del tempo
~r “ ~rp~r0 , t0 , tq
(6)
La derivata temporale nell’approccio Lagrangiano è data da
B
d
~
“
` ~v ¨ ∇
dt
Bt
(7)
dρ
Bρ
~ “ Bρ ` ∇
~ ¨ pρ~v q ´ ρ∇
~ ¨ ~v
“
` ~v ¨ ∇ρ
dt
Bt
Bt
(8)
Ad esempio,
1
da cui, applicando l’equazione di continuità in forma Euleriana (1) otteniamo
l’equazione di continuità in forma Lagrangiana
dρ
~ ¨ ~v
“ ´ρ∇
dt
(9)
Per l’equazione di moto, si riconosce che l’equazione in forma Euleriana (2)
è direttamente
~
d~v
∇p
~
“´
´ ∇φ
(10)
dt
ρ
ovvero il secondo principio della dinamica applicato alla particella fluida.
Riassumendo abbiamo 6 funzioni incognite (ρ, ~v , p, e φ) per 5 equazioni:
Bρ ~
` ∇ ¨ pρ~v q “ 0
Bt
~
B~v
∇p
~
` p~v ¨ ∇q~v “ ´
´ ∇φ
Bt
ρ
∇2 φ “ 4πGρ
A queste dobbiamo aggiungere l’equazione di stato p “ ppρ, T q che nel caso
dei gas perfetti è
ρ
(11)
p “ kT
m̄
ma questa introduce un’ulteriore incognita T . Per determinare la temperatura occorre considerare l’equazione per la conservazione dell’energia.
Dal primo e dal secondo principio della Termodinamica
dU “ T dS ´ pdV
(12)
che si riferisce all’elemento fluido di massa M ; U è l’energia interna (termica)
e S è l’entropia. Dividendo membro a membro per M possiamo passare alle
grandezze per unità di massa (specifiche) ovvero
U
M
S
s “
M
“
ma dV {M “ dpV {M q “ dp1{ρq per cui
ˆ ˙
1
p
d “ T ds ´ pd
“ T ds ` 2 dρ
ρ
ρ
2
(13)
Consideriamo il caso in non ci siano processi dissipativi (con produzione di
calore) e non ci sia trasmissione di calore da un elemento fluido all’altro
(tempi scala trasmissione del calore sono più lunghi dei tempi scala tipici del
sistema fluido). Queste approssimazioni sono ben verificate per il gas perfetto. Allora siamo nell’approssimazione adiabatica in cui T ds “ 0 e pertanto
l’equazione dell’energia esprime la conservazione dell’entropia specifica della
particella fluida
Bs
ds
~ “0
“
` ~v ¨ ∇s
(14)
dt
Bt
Una trasformazione adiabatica di un gas perfetto è caratterizzata da una
relazione ben precisa tra p e ρ che deriva dalla ben nota pV γ “ cost. ovvero
p “ Kργ
(15)
con K costante e γ “ CP {CV . Nel caso di un gas perfetto monoatomico
γ “ 5{3. Una relazione come la 15 per un qualsiasi valore di γ prende il nome
di Politropica e può essere presa in sostituzione dell’equazione dell’energia
per chiudere il sistema. La relazione adiabatica T ds “ 0 fornisce un’altra
relazione che posso usare come alternativa per l’equazione dell’energia ovvero
d “ p{ρ2 dρ. L’energia interna specifica (energia termica) è
“
1 p
γ ´1ρ
(16)
dove si sono utilizzate le relazioni che legano l’energia termica alla temperatura e l’equazione di stato dei gas perfetti. Infine l’equazione dell’energia, in
assenza di processi dissipativi (o di produzione di energia) ed in assenza di
conduzione del calore è
ˆ
˙
d
1 p
p~
“´ ∇
¨v
(17)
dt γ ´ 1 ρ
ρ
dove si è sfruttata l’equazione di continuità della massa in forma Lagrangiana.
1.1
Il Teorema di Bernoulli
Vediamo adesso come si può ricavare il Teorema di Bernoulli dalle equazioni
fluide. Il Teorema di Bernoulli vale nel caso stazionario per cui per ogni
grandezza fisica f , Bf {Bt “ 0.
Partiamo dall’equazione dell’energia d “ ´p dp1{ρq che possiamo scrivere
come
ˆ ˙
ˆ ˙
1
p
1
d “ ´p d
“ ´d
` dp
(18)
ρ
ρ
ρ
3
esplicitando la derivata Lagrangiana, con B{Bt “ 0, si ha
ˆ ˙
~
~ “ ´~v ¨ ∇
~ p ` 1 ~v ¨ ∇p
~v ¨ ∇
ρ
ρ
ˆ
˙
1 ~
p
~
~v ¨ ∇p “ ~v ¨ ∇ `
ρ
ρ
(19)
Consideriamo l’equazione della forza con B{Bt “ 0
p~v ¨ ∇q~v “ ´
~
∇p
~
´ ∇φ
ρ
~
∇p
~ v ´ ∇φ
~
“ ´p~v ¨ ∇q~
ρ
(20)
moltiplichiamo scalarmente membro a membro per ~v ,
1 ~
~ v ´ ~v ¨ ∇φ
~
~v ¨ ∇p “ ´~v ¨ p~v ¨ ∇q~
ρ
˙
ˆ
1 ~
1 2
~
~
~v ¨ ∇p “ ´~v ¨ ∇
v ´ ~v ¨ ∇φ
ρ
2
ˆ
˙
1 ~
1 2
~
~v ¨ ∇p “ ´~v ¨ ∇
v `φ
ρ
2
ma sostituendo l’equazione 19 otteniamo infine
ˆ
˙
1
p
2
~
~v ¨ ∇
v `φ``
“0
2
ρ
Poichè
`
otteniamo infine
ˆ
~
~v ¨ ∇
p
γ p
“
ρ
γ ´1ρ
1 2
γ p
v `φ`
2
γ ´1ρ
(21)
(22)
(23)
˙
“0
(24)
questo significa che lungo una linea di flusso (linea di campo di ~v ) il gradiente
deve essere nullo, ovvero
1 2
γ p
v `φ`
“ cost.
2
γ ´1ρ
(25)
che è proprio il Teorema di Bernoulli.
Vediamo adesso l’applicazione delle equazioni della fluidodinamica a vari casi
di rilevanza astrofisica.
4
2
Perturbazioni lineari e onde
Consideriamo adesso le piccole perturbazioni di un mezzo statico, omogeneo
e indefinito. Le grandezze fisiche della soluzione di equilibrio sono indicate
con il pedice ”0”:
ρ “ ρ0 , p “ p0 ,
~v “ 0,
~ 0 “ 0 ∇ρ
~ 0“0
∇p
Le piccole perturbazioni possono essere espresse nella forma f “ f0 ` δf con
δf {f ! 1, ovvero
ρ
p
φ
~v
“
“
“
“
ρ0 ` δρ
p0 ` δp
φ0 ` δφ
δ~v
(26)
Le equazioni fluide per il mezzo perturbato sono pertanto
Bpδρq ~
` ∇ ¨ rpρ0 ` δρqδ~v s “ 0
Bt
Bpδ~v q
~ v “ ´ 1 ∇pp
~ 0 ` δpq ´ ∇pφ
~ 0 ` δφq
` pδ~v ¨ ∇qδ~
Bt
ρ0 ` δρ
∇2 pφ0 ` δφq “ 4πGpρ0 ` δρq
(27)
Sviluppando al primo ordine (dove necessario), eliminando i termini del
secondo ordine e utilizzando le soluzioni di equilibrio si ottiene
Bpδρq ~
` ∇ ¨ pρ0 δ~v q “ 0
Bt
~
Bpδ~v q
∇δp
~
“´
´ ∇δφ
Bt
ρ0
∇2 δφ “ 4πGδρ
(28)
Attenzione al fatto che il potenziale gravitazionale di un mezzo infinito come
quello in esame non è ben definito; questo problema è stato “evitato” sottraendo all’equazione di Poisson per φ0 `δφ quella all’equilibrio per φ0 (anche
se, come detto, quest’ultima non è ben definita). Questa inconsistenza, che
viene evitata ma non risolta, è nota col nome di “Imbroglio di Jeans”.
Consideriamo perturbazioni adiabatiche, ovvero tali che s “ cost. Allora
l’equazione di stato è esprimibile come
ˆ ˙
Bp
δp “
δρ “ c2s δρ
(29)
Bρ s
5
dove la derivata è stata indicata con c2s e il suo significato sarà chiaro a
breve. Adesso deriviamo rispetto al tempo la prima equazione e prendiamo
la divergenza della seconda:
ı
B 2 pδρq
B ”~
` ρ0
∇ ¨ pδ~v q “ 0
2
Bt
Bt
„
2
~ ¨ Bpδ~v q “ ´ ∇ δp ´ ∇2 δφ
∇
Bt
ρ0
2
∇ δφ “ 4πGδρ
(30)
eliminiamo p utilizzando l’equazione di stato, sostituiamo la terza equazione
nella seconda e definiamo il contrasto di densità ∆ “ δρ{ρ0
ı
B2∆
B ”~
`
∇ ¨ pδ~v q “ 0
Bt2
Bt
„
~ ¨ Bpδ~v q “ ´c2s ∇2 ∆ ´ 4πGρ0 ∆
∇
Bt
Infine, sostituendo la seconda equazione nella prima si ottiene
B2∆
´ c2s ∇2 ∆ ´ 4πGρ0 ∆ “ 0
2
Bt
(31)
questa è una equazione delle onde con un termine forzante dovuto alla gravità.
Cerchiamo soluzioni tipo onda piana
”
ı
∆k p~r, tq “ ∆k exp ˘iωt ` ~k ¨ ~r
(32)
con ∆k ampiezza costante. E’ facile verificare che
B2
∆ “ ´ω 2 ∆
Bt2
∇2 ∆ “ ´k 2 ∆
(33)
(34)
per cui si ottiene la relazione di dispersione
ω 2 “ c2s k 2 ´ 4πGρ0
(35)
Una qualsiasi soluzione dell’equazione 31 è esprimibile come la combinazione
lineare di onde piane (32) ovvero
”
ı
(36)
∆p~r, tq “ Σk ∆k exp ˘iωt ` ~k ¨ ~r
con ω e k che soddisfano la relazione di dispersione 35.
6
Consideriamo il caso in cui la forza di gravità sia trascurabile, ovvero eliminiamo dall’equazione 31 il termine forzante. Otteniamo la classica equazione delle onde con ω “ cs k per cui le piccole perturbazioni sono descrivibili
come una sovrapposizione di onde piane che si propagano con velocità cs :
queste sono le ben note onde sonore e cs è la velocità del suono.
Nel caso in cui la gravità non sia trascurabile abbiamo due tipi di soluzioni
a seconda che ω 2 ą 0 o ω 2 ă 0. Nel primo caso abbiamo delle soluzioni che
continuano a essere esprimibili come la sovrapposizione di onde piane con le
oscillazioni sostenute dalla pressione del gas, sufficiente a opporsi alla forza
di gravità; sostituendo k “ 2π{λ la condizione per le soluzioni oscillatorie è
ˆ
λă
πc2s
Gρ0
˙1{2
“ λJ
(37)
λJ prende il nome di lunghezza d’onda di Jeans. Ovvero la lunghezza d’onda delle perturbazioni deve essere inferiore ad un valore critico al disopra del
quale prevale la gravità. Nel secondo caso la pressione non è in grado di sostenere le oscillazioni e la gravità prevale determinando il collasso gravitazionale
del mezzo, infatti se ω 2 ă 0 si hanno soluzioni del tipo
´
¯
“
‰
∆k p~r, tq “ ∆k exp ˘p4πGρ0 ´ c2s k 2 q1{2 t exp i~k ¨ ~r
(38)
Le soluzioni con il segno ´ sono ovviamente oscillazioni smorzate nel tempo
e quindi poco interessanti. Nel caso invece del segno ` cui il contrasto di
densità cresce esponenzialmente nel tempo, ovvero soluzioni in cui si ha il
collasso gravitazionale.
Avevamo trovato che una nube sferica autogravitante di massa M (fissata!) e temperatura T era gravitazionalmente instabile se il suo raggio era
inferiore al raggio di Jeans
r ă rJ “
GmM
3kT0
(39)
rJ rappresenta le dimensioni massime per avere il collasso della nube se M è
fissata. Questa espressione può essere modificata sostituendo M “ 4{3πr3 ρ0
da cui
ˆ
˙1{2
ˆ
˙1{2
9kT0
kT0
r ą rJ,ρ “
“ 0.846
(40)
4πGmρ0
Gmρ0
ovvero, nel caso in cui fissiamo la densità della nube, troviamo le dimensioni
minime per avere il collasso gravitazionale. Per poter confrontarlo con il
risultato appena ottenuto bisogna considerare che il diametro della nube
7
2rJ,ρ deve corrispondere a mezza lunghezza d’onda di Jeans λJ {2. Inoltre nel
caso di un gas perfetto che esegue una trasformazione adiabatica risulta
p0 9 ργ0
ρ0
p0 “
kT0
m
kT0
p0
c2s “ γ “ γ
ρ0
m
(41)
per cui
rJ,ρ
1
λJ
“
“
4
4
ˆ
πc2s
Gρ0
˙1{2
ˆ
“
πγkT0
16Gmρ0
˙1{2
ˆ
“ 0.572
kT0
Gmρ0
˙1{2
(42)
avendo utilizzato γ “ 5{3 dei gas perfetti. Questa espressione ottenuta con
l’analisi perturbativa delle equazioni fluide è, a meno di un fattore numerico, la stessa di quella ottenuta studiando la stabilità di una nube sferica
autogravitante col teorema del viriale.
Consideriamo adesso il caso dell’instabilità gravitazionale e della crescita esponenziale del contrasto di densità. Trascurando il contributo della
pressione ovvero k 2 c2s , il fattore di crescita esponenziale è
“
‰
∆k p~r, tq „ exp p4πGρ0 q1{2 t “ exppt{τf f q
(43)
e, in assenza del contributo di pressione, il tempo scala di crescita del contrasto di densità τf f assume il significato di tempo di caduta libera:
ˆ
τf f “
1
4πGρ0
˙1{2
“ 0.282 pGρ0 q´1{2
(44)
Studiando la caduta libera di una distribuzione sferica di massa avevamo
trovato
ˆ
˙1{2
3π
τf f “
“ 0.543 pGρ0 q´1{2
(45)
32Gρ0
che, a parte il fattore numerico, è la stessa espressione appena ottenuta. Si
noti come la crescita esponenziale del contrasto di densità avviene fintanto
che siamo nel regime lineare ovvero fino a che ∆ “ δρ{ρ0 ! 1; quando non
siamo più nel regime lineare l’equazione delle onde che abbiamo trovato non
è più valida ed è necessario risolvere le equazioni idrodinamiche complete.
8
Y
Y
Flusso di massa
X
X
F(X)
F(X)
X
X
Discontinuità
a contatto
Onda d’urto
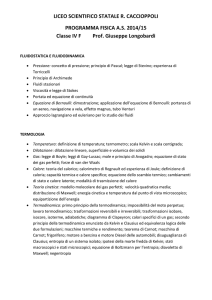
Figura 1: Superfici di discontinuità delle soluzioni: discontinuità a contatto
(sinistra) e onda d’urto (destra).
3
Superfici di discontinuità
Una delle peculiarità dell’idrodinamica è quella di ammettere soluzioni discontinue, ovvero esistono delle superfici speciali, dette superfici di discontinuità, attraverso le quali tutte le grandezze fisiche sono discontinue.
Matematicamente, le soluzioni sono funzioni a gradino. Dal punto di
vista fisico invece, le discontinuità sono regioni molto sottili rispetto alle
altre dimensioni fisiche; le grandezze variano in modo continuo attraverso
le regioni di discontinuità e quindi hanno gradienti molto grandi, ma non
infiniti come nel limite matematico. Tuttavia, nella maggior parte dei casi è
ragionevole fare l’approssimazione matematica di discontinuità a gradino.
Esistono due tipi di discontinuità (figura 1):
• le discontinuità tangenziali, che si hanno ad esempio quando due fluidi
diversi scorrono l’uno accanto all’altro e la superficie di contatto non è
attraversata da alcun flusso di materia;
9
• le onde d’urto (shock waves o shocks), che si hanno quando la superficie
di separazione tra i due fluidi è attraversata da un flusso di massa,
quantità di moto ed energia.
Le discontinuità tangenziali sono in genere poco interessanti perchè sono
configurazioni instabili e quindi con vita breve. Al contrario, le onde d’urto
sono estremamente importanti in astrofisica perchè sono alla base di molti
fenomeni, specialmente quelli di natura esplosiva come le Supernovae (ma
non solo ...).
Potrebbe sembrare che le soluzioni discontinue in generale, e le onde d’urto in particolare, si formino soltanto per particolari condizioni al contorno;
in realtà si formano naturalmente in un ampio spettro di fenomeni. Sono
praticamente inevitabili quando le perturbazioni del sistema idrodinamico
non sono infinitesime come quelle viste in precedenza.
Per poter trattare le soluzioni (matematicamente) discontinue è necessario prima di tutto esprimere le equazioni idrodinamiche in forma conservativa per vedere quali grandezze si conservano al passaggio delle superfici di
discontinuità.
4
Equazioni in forma conservativa
Consideriamo l’equazione di conservazione della massa
Bρ ~
` ∇ ¨ pρ~v q “ 0
Bt
(46)
Consideriamo un elemento di fluido di massa ∆M , volume ∆V e integriamo
l’equazione di continuità sul volumetto in esame
„ż
ż
B
~ ¨ pρ~v q “ 0
∇
ρdV `
Bt ∆V
∆V
ż
B
∆M `
pρ~v q ¨ ~n dS “ 0
(47)
Bt
∆S
quest’ultima equazione indica che la massa dell’elemento fluido ∆M può
variare nel tempo solo per un flusso di massa, ρ~v , attraverso la superficie ∆S
che delimita il volume ∆V .
In generale, data una grandezza u nel volume ∆V caratterizzata da un
flusso f~u attraverso la superficie ∆S che delimita il volumetto, si può scrivere
„ż
ż
B
u dV `
f~u ¨ ~n dS “ 0
(48)
Bt ∆V
∆S
10
da cui l’equazione in forma conservativa
Bu ~ ~
` ∇ ¨ fu “ 0
Bt
(49)
Per quanto riguarda ρ, con flusso ρ~v , la prima equazione della fluidodinamica
è direttamente in forma conservativa:
Bρ ~
` ∇ ¨ pρ~v q “ 0
Bt
(50)
Consideriamo l’equazione per ~v
~
B~v
~ v “ ´ ∇p
` p~v ¨ ∇q~
Bt
ρ
(51)
dove abbiamo trascurato il termine gravitazionale per semplicità. Consideriamo la variazione temporale di ρ~v e utilizziamo l’equazione di continuità
per ρ e quella per ~v :
Bρ
B~v
B
pρ~v q “
~v ` ρ
Bt
Bt
Bt
”
ı
B
~ ¨ pρ~v q ~v ´ ρp~v ¨ ∇q~
~ v ´ ∇p
~
pρ~v q “ ´ ∇
Bt
Consideriamo la i-esima componente di questa equazione
ˆ
˙
B
B
Bp
B
pρvi q “ ´
pρvj q vi ´ ρ vj
vi ´
Bt
Bxj
Bxj
Bxi
(52)
(53)
dove si è utilizzato la convenzione di Einstein in base alla quale gli indici ripetuti sono sommati (ad esempio, vj uj “ Σ3j“1 vj uj ). Si nota che quell’equazione
può essere riscritta come
B
B
Bp
pρvi q “ ´
pρvi vj q ´
Bt
Bxj
Bxi
(54)
Si definisce il tensore degli sforzi di Reynolds
Rij “ ρvi vj ` pδij
(55)
dove δij è la delta di Kronecker (δij “ 1 per i “ j, 0 altrimenti). Il tensore Rij è chiaramente simmetrico, per cui si può operare sugli indici i e j
indifferentemente. Si può scrivere
B
~ ¨ R̂
Rij “ ∇
Bxj
11
(56)
da cui si vede come si può definire la divergenza del tensore R̂ che è un
vettore. Infine si ottiene
B
~ ¨ R̂ “ 0
pρ~v q ` ∇
Bt
(57)
ovvero l’equazione in forma conservativa per ρ~v , il cui flusso è un tensore R̂.
Per quanto riguarda l’equazione dell’energia in forma conservativa, notiamo che la densità di energia del fluido è
˙
ˆ
1 2
v `ε
(58)
η“ρ
2
con ε energia interna (termica) del fluido. Allora l’equazione di continuità
sembrerebbe essere
Bη
` ~v ¨ f~E “ 0
(59)
Bt
con f~E “ η~v “ ρpv 2 {2 ` εq~v , in analogia all’equazione di continuità per ρ. In
realtà f~E è incompleta; in condizioni adiabatiche come quelle che abbiamo
considerato, l’energia non varia solo per il suo flusso attraverso la superficie
ma anche per il lavoro termodinamico dE “ ´pdV . Utilizzando le equazioni
fluide ottenute fin qui si dimostra che
„ ˆ 2
˙
„ ˆ 2
˙
v
v
B
~
~ ¨ pp ~v q
ρ
`ε
`∇¨ ρ
` ε ~v “ ´∇
(60)
Bt
2
2
e quindi l’equazione dell’energia in forma conservativa è
„ ˆ 2
˙
„ ˆ 2
˙
B
v
v
p
~
ρ
`ε
`∇¨ ρ
`ε`
~v “ 0
Bt
2
2
ρ
(61)
notare che ε ` p{ρ “ h con h entalpia specifica, ovvero per unità di massa.
12
5
Le onde d’urto
Nel caso delle piccole perturbazioni abbiamo trovato delle soluzioni tipo onde
sonore che si propagano con velocità cs , se non si tien conto della gravità.
La propagazione di onda sonora è rappresentata in figura 2: il profilo della
perturbazione della grandezza F pxq si propaga inalterato nello spazio.
Se le perturbazioni non sono piccole, ovvero siamo nel regime non lineare,
si trova che esistono delle soluzioni tipo onda dette ”onde semplici”. La
caratteristica di queste onde è che non hanno una velocità di propagazione
(del suono) costante ma che dipende dalla densità: maggiore è la densità,
maggiore è la velocità di propagazione. La propagazione di un’onda nel
regime non lineare è rappresentata sempre in figura 2. La cresta dell’onda,
dove la densità è massima, si muove più rapidamente del ventre dove la
densità è minima. Dopo un certo tempo si tenderebbe ad avere una situazione
non fisica in cui la cresta ha superato il ventre dell’onda. In realtà prima
di giungere in tale situazione si arriva alla formazione di una discontinuità
nella quantità F pxq la cui variazione è a gradino nel punto indicato in figura
dalla riga tratteggiata. Tale condizione è riprodotta anche in figura 3 dove è
riportato il profilo dell’onda semplice al passare del tempo con la formazione
della discontinuità al posto della soluzione non fisica (tratteggiata).
Per semplicità mettiamoci in un sistema di riferimento inerziale comovente con la superficie di discontinuità; tale riferimento esiste sempre, almeno
istantaneamente. Consideriamo inoltre una situazione stazionaria (B{Bt “ 0)
di simmetria piana, ovvero quella in cui tutte le quantità variano solo nella
direzione x, perpendicolare alla superficie di discontinuità. Ricordiamo che
qualsiasi superficie, nell’intorno di un punto, può essere ricondotta ad un
piano.
~ L’equazione scritta in
Prendiamo in esame una grandezza u con flusso J.
forma conservativa è
Bu ~ ~
`∇¨J “0
(62)
Bt
che nell’ipotesi di stazionarietà e simmetria piana diventa semplicemente
dJx
“0
dx
(63)
Alla superficie di discontinuità per x “ xs , la quantità Jx sarà discontinua e
tale che Jx “ J1 per x ą xs e Jx “ J2 per x ă xs . Posso integrare quell’equazione in un intervallo infinitesimo di ampiezza 2η attorno alla superficie
di discontinuità ottenendo nel limite di η piccolo
ż `η
dJx
dx “ J1 ´ J2 “ 0
(64)
´η dx
13
F(X)
t
X
F(X)
t
X
Figura 2: Propagazione di un’onda sonora nel regime lineare (alto) e nel regime
non lineare (basso).
14
1.8. DISCONTINUITY
27
Figure3:1.1.
Formationdi of
a shock
(Landau
and&Lifshitz
Figura
Formazione
un’onda
d’urto
(Landau
Lifshitz).
1987b).
from a simple case: very special waves of noninfinitesimal
amplitude,
called
waves.di
Landau
and Lifshitz
(1987b) la superfiabbiamo quindi
trovato
la simple
condizione
conservazione
attraverso
discuss
them,
whereas
we
shall
simply
sum
up
their
main
fea-conservare al
cie di discontinuità, ovvero il flusso della grandezza u si deve
tures.superficie
Let us consider
a perturbation with a finite (i.e., not
passaggio della
di discontinuità
infinitesimal) amplitude, within an otherwise homogeneous
fluid (see fig. 1.1). ItrJs
is possible
show
“ J1 ´ Jto2 “
0 for simple waves,
(65)
too, that the speed of propagation is greater where density is
greater. In particular, the points near the crest of the wave
dove si è definita
la notazione compatta rJs per la condizione di conservaziowill move more quickly than those near its belly, and the difne.
ference between the two velocities is not infinitesimal, because
Le equazioni
della fluidodinamica
scritte
in forma
conservativa ci fornithe amplitude
of the wave has been
assumed
finite. Therefore,
scono direttamente
le
condizioni
di
continuità
al
passaggio
della discontinuità
the crest will reach the belly in a finite time, thus forming
a surface of discontinuity. The only waves that manage to
Bρ never
avoid this destiny are those whose density
decreases
~ ¨ pρ~
`∇
v q “ 0 in
the direction of motion; but, apart Bt
from this peculiar case,
B
any perturbation with a finite amplitude
evolves
toward a
~
pρ~v q ` ∇ ¨ R̂ “ 0
„ ˆ 2
˙
„ ˆ Bt
˙
B
v
v2
p
~
ρ
`ε
`∇¨ ρ
`ε`
~v “ 0
Bt
2
2
ρ
(66)
con Rij “ ρvi vj ` pδij . Le condizioni di continuità nel caso stazionario e a
15
simmetria piana sono quindi:
rρvx s “ 0
(67)
ρvx2 s
rp `
“0
rρvx vy s “ 0
rρvx vz s “ 0
(68)
„ ˆ 2
˙
v
p
ρ
`ε`
vx “ 0
2
ρ
(69)
dove sono state incluse anche le condizioni per il flusso di quantità di moto
parallelo alla superficie di discontinuità.
Esistono due tipi di discontinuità.
Nel primo caso la massa non attraversa la superficie ed il flusso di massa
è nullo. Questo richiede che ρ1 v1x “ ρ2 v2x “ 0 ovvero v1x “ v2x “ 0. La
condizione di continuità sul flusso di quantità di moto comporta che rps “ 0.
Questa è la discontinuità tangenziale dove, a parte velocità e pressione, tutte
le altre quantità sono discontinue. Queste discontinuità, come abbiamo detto,
sono instabili per qualsiasi equazione di stato. Questo significa che spariscono
in tempi scala molto brevi portando ad un rimescolamento (convettivo) dei
fluidi.
Nel secondo tipo di discontinuità, le onde d’urto, il flusso di massa attraverso la superficie non è nullo, pertanto v1x e v2x sono diversi da 0. Dalle
condizioni rρvx vy s “ 0 e rρvx vz s “ 0 ne consegue che le velocità tangenziali
debbano essere continue ovvero che rvy s “ 0, rvz s “ 0. Utilizzando la continuità su ρvx , si può semplificare la condizione di continuità sul flusso di
energia ed ottenere infine che per le onde d’urto
rρvx s “ 0
rp ` ρvx2 s “ 0
„
p
v2
`ε`
“0
2
ρ
(70)
queste sono le condizioni idrodinamiche sulle onde d’urto e sono dette condizioni di Rankine-Hugoniot.
Data la continuità nelle velocità trasversali possiamo metterci in un riferimento in cui queste siano nulle. Ricordiamo inoltre che siamo in un
16
riferimento comovente con l’onda d’urto. Indichiamo con 1 il gas prima
dell’attraversamento dell’onda d’urto (upstream) e con 2 il gas dopo l’onda
d’urto (downstream). Allora, v1x “ ´vs con vs velocità dell’onda d’urto, se
il gas upstream è in quiete. Definiamo il numero di Mach
M“
v
cs
(71)
con v “ |v1x |, |v2x | e consideriamo che nel caso di un gas perfetto
c2s “ γ
p
kT
“γ
ρ
m
(72)
e che
p
1 kT
p
1 p
γ p
c2s
“
` “
`p“
“
(73)
ρ
γ´1 m
ρ
γ ´1ρ
γ ´1ρ
γ´1
Utilizzando queste definizioni si possono risolvere le condizioni RH ed ottenere infine
ε`
ρ2
v1
pγ ` 1qM12
“
“
ρ1
v2
pγ ´ 1qM12 ` 2
2γM12 γ ´ 1
p2
“
´
p1
γ`1
γ`1
2
r2γM1 ´ pγ ´ 1qsrpγ ´ 1qM12 ` 2s
T2
“
T1
pγ ` 1q2 M12
2 ` pγ ´ 1qM12
M22 “
2γM12 ´ γ ` 1
(74)
Ovvero si vede che le condizioni di Rankine-Hugoniot permettono di determinare le grandezze post-shock in funzione soltanto delle grandezze pre-shock e
del numero di Mach dello shock stesso. La prima cosa da notare è che quando
M1 “ 1 non si hanno discontinuità e la materia non subisce trasformazioni.
Poi si può notare che M1 potrebbe assumere un qualsiasi valore maggiore o
minore di 1.
Consideriamo quello che succederebbe per M1 ă 1. Si avrebbe v1 ă
v2 e T1 ą T2 ovvero si trasformerebbe parte dell’energia interna del fluido
(disordinata) in energia cinetica (moto ordinato) senza alcun altro effetto.
Per confermare come questo sia impossibile, possiamo calcolare l’andamento
dell’entropia pre- e post-shock; si trova che s è discontinua e che, per M1 ă 1,
si ha s2 ă s1 ovvero una diminuzione di entropia in una trasformazione
adiabatica (sistema isolato). Questo è impossibile per il secondo principio
della termodinamica e quindi ne possiamo concludere che per le onde d’urto
si deve avere M1 ą 1 ovvero gli shocks devono essere sempre supersonici!
17
Nel caso M1 ą 1, si noti come lo shock converta energia cinetica ordinata
(v2 ă v1 ) in moti disordinati (riscaldamento, ovvero aumento di energia
interna) in quanto T2 {T1 ą 1; quel rapporto può diventare molto grande
all’aumentare di M1 . In contrasto al caso precedente, adesso si ha s2 ą s1 ,
in accordo con il secondo principio della termodinamica.
Nel caso delle esplosioni di supernovae, lo shock può essere ipersonico, ovvero M1 " 1. In tal caso le relazioni appena trovate per f2 {f1 si semplificano
e, nel limite M Ñ 8 diventano
v1
γ`1
ρ2
“
“
ρ1
v2
γ´1
2
2γM1
p2
“
p1
γ`1
T2
2γpγ ´ 1qM12
“
T1
pγ ` 1q2
pγ ´ 1q
M22 “
2γ
(75)
che possono anche essere scritte utilizzando M1 “ v1 {cs1 “ v12 ρ1 {pγp1 q e
p1 {ρ1 “ kT1 {m:
ρ2 “
v2 “
p2 “
T2 “
M22 “
γ`1
ρ1
γ´1
γ´1
v1
γ`1
2ρ1 v12
γ`1
2pγ ´ 1qpm{kB qv12
pγ ` 1q2
pγ ´ 1q
2γ
(76)
con m massa media delle particelle. Si noti come per γ “ 5{3 si ha un
salto massimo di densità pari ρ2 “ 4ρ1 . Da notare come, contrariamente
alla densità, pressione e temperatura dopo l’urto (downstream) non abbiano
limiti e dipendano direttamente da v12 .
18
6
Flussi auto-similari: la soluzione di SedovTaylor
Consideriamo l’esplosione di una supernova che possiamo considerare come
il rilascio improvviso di energia E in un volume trascurabile per r “ 0 e
t “ 0. Se il mezzo esterno è omogeneo e statico (ρ0 “ cost., ~v0 “ 0), il moto
dell’onda d’urto che si genera per r “ 0 sarà radialmente simmetrico. Supponendo poi che il mezzo sia ”freddo” (T0 “ 0, ovvero temperatura trascurabile
rispetto al mezzo post-shock), possiamo trovare la forma delle soluzioni con
argomenti di auto-similarità usando soltanto i dati a disposizione, ovvero E e
ρ0 . Vogliamo ottenere Rs ptq e Vs ptq ovvero il raggio dell’onda d’urto e la sua
velocità in funzione del tempo. Questi devono essere una combinazione di E,
ρ e, ovviamente, tempo t. Ragioniamo in termini dimensionali e scriviamo
R “ E α ρβ0 tγ
(77)
Facendo un’analisi dimensionale otteniamo
rLs “ r M α L2α T ´2α M β L´3β T γ s
(78)
Da cui è facile ottenere che α “ ´β “ 1{5 e γ “ 2{5. Infine, detta B una
costante adimensionale che determineremo in seguito, possiamo scrivere
ˆ
Rs ptq “
E t2
B
ρ0
˙1{5
9 t2{5
(79)
Inoltre
dRs
d ` 2{5 ˘
9
t
9 t´3{5
(80)
dt
dt
Da notare come si sia trovata la dipendenza di Rs e Vs da t in modo puramente
dimensionale, senza risolvere alcuna equazione. A questo punto possiamo
applicare le condizioni di continuità nel caso ipersonico (Eq. 76). Queste
equazioni sono state ottenute nel riferimento comovente con lo shock pertanto
le velocità nel riferimento non comovente sono
Vs ptq “
v11 “ v1 ` Vs “ 0
v21 “ v2 ` Vs
(81)
con Vs velocità dello shock e dove si è assunto che la materia pre-shock sia
in quiete (v11 “ 0). Pertanto ponendo ρ1 “ ρ0 , v21 “ vpRs´ q [f pRs´ q indica la
19
quantità post-shock] abbiamo:
ρpRs´ q “
γ`1
ρ0
γ´1
vpRs´ q “ Vs ` v2 “ Vs `
ppRs´ q “
2Vs
γ´1
Vs “
γ`1
γ`1
2ρ0 Vs2
γ`1
(82)
Adesso siamo in grado di calcolare le condizioni post-shock. Definiamo la
distanza adimensionale dallo shock dall’origine:
´ ρ ¯1{5
r
0
“r
(83)
ξptq “
Rs ptq
BE t2
e rinormalizziamo tutte le grandezze fisiche relativamente ai loro valori postshock (cioè per Rs´ )
γ`1
ρ0 Rpξq
γ´1
2Vs
vpr, tq “ vpRs´ qRrξpr, tqs “
Vpξq
γ`1
2ρ0 Vs2
ppr, tq “ ppRs´ qRrξpr, tqs “
Ppξq
γ`1
ρpr, tq “ ρpRs´ qRrξpr, tqs “
(84)
Le funzioni dimensionali appena definite hanno condizioni al contorno Rp1q “
Vp1q “ Pp1q “ 1. Quello che abbiamo fatto è molto conveniente perchè adesso le quantità fisiche non sono più funzione di due variabili (r, t) ma di una
soltanto (ξ) in modo che un sistema alle derivate parziali è stato ridotto ad
un sistema a derivate ordinarie, più semplice da risolvere. Partiamo dalle
equazioni fluide, e riscriviamole in simmetria sferica:
Bρ Bpρvq 2ρv
`
`
“ 0
Bt
Br
r
Bv
Bv
1 Bp
`v
“ ´
Bt
Br
ρ Br
ˆ
˙
B
B
p
`v
ln γ “ 0
Bt
Br
ρ
(85)
dove la terza equazione è semplicemente l’equazione dell’energia scritta per
l’entropia specifica (ds{dt “ 0) e dove si è sfruttato il fatto che s 9 lnpp{ργ q1 .
1
Da T dS “ dU ` pdV si ottiene che S “ nR ln V ` ncV ln T ` cost. da cui, utilizzando
l’equazione di stato, S “ n cV ln pV γ `cost. Infine s “ S{M “ 1{pγ ´1qkB lnpp{ργ q`cost.
20
Tenendo conto che dobbiamo fare il cambio di variabili da r, t a ξ, t1 (con
t1 “ t) e che
¨
˛ ¨ Bξ ˇˇ Bt1 ˇˇ ˛ ¨
˛
B
B
ˇ
ˇ
Bt ˇr Bt ˇr ‹
˚ Bt ‹ ˚
Bξ ‹
‹˚
˚
‹ ˚
‹
˚
‹˚
˚
‹“˚
˚
‹
˝ B ‚ ˝ Bξ ˇˇ Bt1 ˇˇ ‹
˝
‚
B ‚
ˇ
ˇ
Br
Br ˇt Br ˇt
Bt1
ovvero
B
2ξ B
B
“ “´
` 1
Bt
5t Bξ Bt
B
ξ B
“
Br
r Bξ
e indicando con X9 “ dX{dξ si ottiene infine
2
9 ` RVq
9 ` 4 RV “ 0
pRV
γ`1
γ`1 ξ
9
4VV
γ ´ 1 2P9
´2ξ V9 ´ 3V `
“ ´
γ`1
γ`1 R
9
9
9
9
2 VP
2γ
Pξ
R
R
´3 ´
`
` γξ ´
V
“ 0
P
γ`1 P
R γ`1 R
´ξ R9 `
(86)
che è un sistema di equazioni differenziali alle derivate ordinarie. La soluzione
di questo sistema può essere ottenuta numericamente e, in figura 4, si riporta
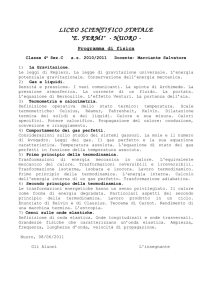
quella ottenuta per γ “ 5{3.
Si noti come le quantità post-shock dipendano da R, V e P che, riscalando
il raggio con Rs ptq, non dipendano esplicitamente dal tempo: l’auto-similarità
deriva proprio dal fatto che la forma ”normalizzata” delle soluzioni è sempre
la stessa indipendentemente dal tempo. Come si nota dalla figura, gran
parte della massa è concentrata nella regione immediatamente successiva
allo shock (ovvero per r{Rs ptq » 0.9 ´ 1; si tenga anche conto del fatto che
dM “ 4πr2 ρdr) mentre il resto della sfera di raggio Rs ptq è riempita di gas
tenue e molto caldo che fornisce la pressione necessaria alla propagazione
dello shock.
Infine, per calcolare il valore della costante B, si può integrare la densità
di energia ρpv 2 {2 ` εq sul volume occupato dal gas post-shock
˙
ż Rs ˆ
p
1 2
ρv `
4πr2 dr
(87)
E“
2
γ
´
1
0
da cui
B 16π
1“ 2
γ ´ 1 25
ż1
rRpξqV 2 pξq ` Ppξqsξ 2 dξ
0
21
(88)
Explosive events: SNe and GRBs
Relativistic stars
Gravitational collapse and Black Holes
Electrodynamics of compact objects
High Energy Astrophysics
The theory of relativity
Applications to compact objects
Figura 4: Soluzioni auto-simili di Sedov-Taylor per γ “ 5{3.
Figure: The self-similar Sedov-Taylor solution for
= 5/3.
che, per γ “ 5{3 (gas monatomico) fornisce B » p2.02q1{5 . Questa soluzione
per una forte esplosione in un mezzo omogeneo è dovuta a Sedov (1946) e
Taylor (1950).
e we know the post-shock quantities and we rescale the radius
7 Le fasi
dell’espansione
dei resti
di Superhe self-similarity
insures
that the spatial
profiles
of the normali
nova As we can see, most of the mass is concent
on time explicitly.
Come visto nelle lezioni precedenti, il core di una stella massiccia (M ą 8 M )
while the interior
is filled
with
hot diand
lightdelgas,
the pr
collassa quando
sé terminata
la reazione
bruciamento
Silicio e providing
si arriva
formazione di una stella di neutroni. La mancanza del supporto di
e the shockalla
propagate.
pressione determina il collasso degli strati esterni della stella che rimbalzano
d
sulla stella di neutroni dando luogo all’esplosione della supernova di tipo II.
Nella prima fase dell’esplosione l’energia rilasciata E è talmente grande che
la presenza del mezzo interstellare ρ0 è totalmente ininfluente; l’onda d’urto
si propaga in modo balistico con velocità costante Vs ptq “ Vs :
e of can now be calculated by integrating the energy density
volume occupied by the shock gas
1 2
⇢v +
2
p
!
1
E “ Mej Vs2
2
16⇡
1 25
Z
1
(89)
con valori tipici 2
di E “ 1052 erg, Mej “ 10 Md , si ottiene Vs “ 104 km s´1 .
L’onda d’urto dell’esplosione ”spazza” via2il materiale del mezzo circostante
1
4⇡r dr ) 1 =
22
0
3, appropriate for a monoatomic gas, provides
L. Del Zanna
[R (⇠)V 2 (⇠) + P
' 2.02.
Relativistic Astrophysics and compact objects
(interstellare) che viene spinto verso l’esterno e accumulato dall’onda urto.
Pertanto l’espansione ”libera” avrà termine quanto il materiale raccolto (densità del mezzo interstellare ρ0 » 1 cm´3 » 10´24 g cm´3 ) avrà una massa pari
a quella del materiale espulso ovvero
4 3
πR ρ0 “ Mej
3 s
(90)
se Rs “ Vs τ , otteniamo Rs » 5 pc e τ » 500 yr.
La seconda fase è causata da un rallentamento dell’espansione dovuto
all’accumulo della massa del mezzo interstellare che viene spazzata via; l’espansione avviene in regime adiabatico poiché per T ą 106 K il raffreddamento radiativo del gas è molto poco efficiente ed il tempo di raffreddamento
(τcool “ E{L, con L energia irraggiata per unità di tempo) è molto lungo
rispetto al tempo scala di espansione. Quindi l’energia totale si conserva
(siamo nel caso adiabatico) e possiamo applicare la soluzione di Sedov per
un flusso adiabatico autosimile. Per applicare questo modello dobbiamo anche aspettare che il reverse shock ovvero l’onda d’urto che si genera a seguito
del rallentamento e si propaga in verso opposto a quello dell’esplosione abbia
percorso più volte lo spazio tra Rs e l’origine per portare il gas per r ă Rs
nelle condizioni previste dalla soluzione di Sedov.
La temperatura post-shock decresce rapidamente al rallentamento dello
shock
T pRs´ q 9 Vs2 9 t´6{5
(91)
e, quando diventa inferiore a T » 106 K, il gas comincia a raffreddare efficacemente per l’emissione dovuta alla ricombinazione degli atomi. L’energia
non può essere più conservata, ma si deve conservare la quantità di moto
ovvero
4
πρ0 Rs3 Vs “ cost.
(92)
3
se prendiamo Rs 9 tα , Vs “ dRs {dt 9 tα´1 ovvero Rs3 Vs 9 t4α´1 “ cost. Se ne
deduce infine che 4α ´ 1 “ 0 ovvero
Rs
Vs
9
9
t1{4
t´3{4
(93)
Questa fase è detta di snowplow perchè si può dimostrare che il materiale
raccolto nella parte post-shock è concentrato in uno strato molto piccolo.
Infine, quando Vs raggiunge la velocità del suono del mezzo interstellare, non
abbiamo più un’onda d’urto e c’è il mescolamento con il mezzo ambiente
Rs „ cost. Queste fasi sono riassunte in figura 5.
23
Explosive events: SNe and GRBs
Relativistic stars
Gravitational collapse and Black Holes
Electrodynamics of compact objects
High Energy Astrophysics
The theory of relativity
Applications to compact objects
Figura 5: Le quattro fasi dell’espansione di una supernova (e del suo resto): Rs 9 t,
Rs 9 t2{5 , Rs 9 t1{4 , Rs „ cost.
2/5
1/4
re: The four phases of a SNR expansion: Rs / t, Rs / t
, Rs / t
, Rs ⇠ cons
ock temperature decreases rather rapidly as the shock slows down
T (Rs ) / Vs2 / t
6/5
,
reshold of T ' 106 K ions start to recombine and energy is radiated aw
adiative cooling in forbidden lines). Energy cannot be conserved any lo
ay still impose the conservation of momentum, which gives
4⇡
3
⇢
R
Vs
0
s
3
24
= const ) Rs / t 1/4 ,
Vs / t
3/4
.
s said of the snowplow, because material is collected post-shock in a v
. Finally, when the local ISM sound speed is reached, we have no long