Reti satellitari
geostazionarie
Integrazione rete wired
con link satellitare mobile
Il satellite inoltra i dati
sul down-link verso il
receiver mobile...
…i
dati arrivano alla
stazione di up-link, che
li trasmette al satellite.
Internet
…che
Un server (web,
ftp...) invia dati
ad un client...
riceve quello
che aveva
precedentemente
richiesto.
•
•
•
•
•
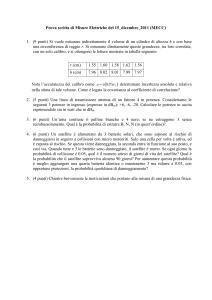
Quattro differenti tipi di orbite
satellitari possono essere
identificate in funzione della
forma e del diametro dell’orbita:
GEO: orbita geostazionaria, a
circa 36000 km sulla superficie
terrestre
LEO (Low Earth Orbit): a circa
500 - 1500 km
MEO (Medium Earth Orbit) o
ICO (Intermediate Circular Orbit):
a circa 6000 - 20000 km
HEO (Highly Elliptical Orbit)
orbite ellittiche
GEO
MEO
HEO
LEO
terra
1000
10000
35786
km
piano dell'orbita satellitare
orbita satellitare
δ
inclinazione δ
piano equatoriale
Inclinazione: angolo tra piano dell’orbita e piano equatoriale
Elevazione:
angolo tra il centro del beam del
satellite e la superficie terrestre
elevazione minima:
elevazione necessaria
al minimo per comunicare
con il satellite
ε
int
r
p
t
foo
LOS (Line of Sight) linea di vista al satellite
necessaria per la connessione
se l'elevazione è alta, minore è
l'assorbimento dovuto per es. agli edifici
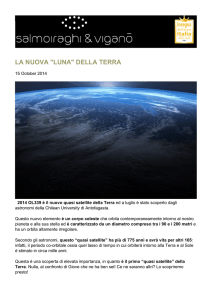
Satelliti in orbite circolari
Orbita stabile
forza di attrazione Fg = m g (R/r)²
forza centrifuga Fc = m r ω²
Fg = Fc
m g (R/r)2 = 4 m r (π f)2
m: massa del satellite
R: raggio della terra (R = 6370 km)
r: distanza dal centro della terra
g: accelerazione di gravità (g = 9.81 m/s²)
ω: velocità angolare (ω = 2 π f; f : frequenza di rotazione)
t
r=3
gR 2
(2π f ) 2
periodo [h] T = 1/f
24 h
Satelliti geostazionari:
20
16
12
8
4
distanza sincrona rs – R = 35786 km
10
20
30
Orbita distante 35786 km dalla
superficie della terra, nel piano
equatoriale (inclinazione 0°)
• rotazione completa in un
giorno esatto, il satellite è
sincrono con la rotazione della
terra intorno al proprio asse
• posizioni di antenna fisse, non
è necessario nessun
aggiustamento
r
40 x106 m
Fu lo scrittore di fantascienza Arthur C. Clarke
che concepì la possibilità dei satelliti di
comunicazione artificiali nel 1945. Clarke
esaminò la logistica del lancio di un satellite,
possibili orbite ed altri aspetti della creazione di
una rete di satelliti circolanti intorno al mondo,
puntando ai benefici della comunicazione
globale ad alta velocità. Suggerì anche che tre
1945: Arthur C. Clarke pubblicò un saggio su
satelliti geostazionari avrebbero fornito una
„ExtraTerrestrial Relays“
copertura sull’intero pianeta.
Sputnik 1 fu lanciato dall’Unione Sovietica il 4 ottobre 1957. Aveva a bordo due trasmettitori
radio (20 e 40 MHz) che emettevano un ‘beep’ periodico. Era una sfera di 58 cm di diametro,
del peso di 83 kg che orbitava ad un’altezza sulla
terra di circa 250 km. Effettuò le prime misure di
densità di elettroni della ionosfera e le prime
investigazioni sulla trasmissione delle onde
elettromagnetiche attraverso la ionosfera.
Rimase funzionante per tre settimane ma restò
in orbita per 92 giorni.
La parola Russa "Sputnik" significa “compagno
di viaggio" ("satellite" nel senso astronomico).
Sputnik 2 fu la seconda nave spaziale lanciata
1957: Il primo satellite artificiale, lo Sputnik
in orbita terrestre il 3 novembre 1957, e la prima
a portare a bordo un animale, la cagnetta Laika.
Il primo satellite di comunicazione fu… la luna.
Nel 1954 J. H. Trexler riuscì a ricevere la sua voce
riflessa dalla luna.
Appunti di J. H. Trexler, datati 28 gennaio 1945, su
calcoli per un collegamento a lunga distanza tra Los
Angeles e Washington attraverso la luna.
Migliorando l’idea di inviare e ricevere segnali dalla luna, nel 1960 la NASA lanciò un satellite
con il compito di riflettere segnali di comunicazione. Echo I era un pallone fatto di Mylar
ricoperto di alluminio che fu lanciato mediante un razzo nello
spazio. Quando raggiunse l’orbita di 1.609 km sopra la terra,
gonfiò dall’interno una sfera di magnesio di 67 centimetri di
diametro sino a raggiungere 30 metri di diametro.Girando
intorno al globo ogni due ore, splendeva più della stella polare
di sera. Echo I rifletteva segnali di voce, musica, giornali, e
teletype inviati da stazioni di terra negli Stati Uniti a stazioni
riceventi in Europa.
I satelliti di comunicazione di oggi sono transceivers attivi che
ricevono un segnale, lo elaborano, e lo trasmettono indietro
sulla Terra. Echo I era chiamato un satellite passivo poichè
1960: Il primo satellite di comunicazione
rifletteva semplicemente i segnali.
a riflessione, Echo
1960: Il primo satellite di comunicazione a ritrasmettere
messaggi elettronicamente, Courier 1B
1963: Il primo satellite geostazionario, SYNCOM
1962: La prima trasmissione di immagini televisive
via satellite, Telstar
1965: Il primo satellite geostazionario commerciale,
Early Bird (INTELSAT I)
1969: L’uomo sbarca sulla luna, Missione Apollo.
Una ripresa televisiva dal vivo permise di seguire da Terra le
attività degli astronauti sul suolo lunare per le due ore e mezza
previste dal programma della missione
1977 OTS, il primo satellite per telecomunicazioni dell'ESA
1977: Il primo uso delle frequenze SHF (12-18 GHz),
satellite italiano SIRIO
1989: Il primo satellite in banda Ka (18-31 GHz), Olympus
Reti satellitari
•
Una rete satellitare consiste in
– una rete di stazioni terrestri: Terminali fissi o mobili, Gateway satellitare,
Network Control Station e Satellite Operation Centre
– uno o più transponder satellitari a molti canali
• Un transponder riceve segnali su una frequenza di uplink (per es. 6 GHz ), li rigenera e li
ritrasmette su una frequenza di downlink inferiore (per es. 4 GHz)
•
•
Alcuni sistemi satellitari moderni hanno localizzato nei satelliti funzioni di
routing e di gestione delle richieste di banda
Reti basate su satelliti geostazionari:
– i satelliti geostazionari hanno tipicamente una grande footprint (sino a 34%
della superficie terrestre!), perciò è difficile un riuso delle frequenze
– hanno cattive elevazioni in aree con latitudine sopra i 60° a causa della
posizione fissata sull’equatore
– è necessaria un’alta potenza di trasmissione
– hanno alta latenza a causa della lunga distanza (ca. 275 ms)
Sistemi multi-point to multi-point
•
•
Molti sistemi di comunicazione satellitari sono point to point, o point to multipoint
– per questi tipi di sistemi, lo spettro di frequenza usato da ogni stazione
terrestre è tipicamente fissato o preassegnato
Sistemi multi-point to point o multi-point to multi-point stanno diventando
sempre più importanti
– in tali sistemi, tutte le stazioni trasmittenti debbono competere per accedere
al mezzo di trasmissione condiviso
– protocolli di controllo di accesso al mezzo di tipo carrier sense sono molto
inefficienti per reti satellitari a causa del lungo ritardo di propagazione
– sistemi più moderni usano canali di comunicazione “demand assigned” (per
la durata di una connessione) dopo uno scambio di segnalazione con una
Network Control Station a terra o con un Traffic Resource Manager (TRM)
posto sul satellite
– l’accesso al canale di segnalazione condiviso è basato su una qualche forma
di protocolli di accesso “competitivo”
La rete EuroSkyWay
•
•
La rete EuroSkyWay è stata realizzata da Alenia Spazio per conto di ESA. Come la
maggior parte delle reti multimediali via satellite, EuroSkyWay opera in banda Ka, vale a
dire utilizza frequenze di 20/30 GHz, ed è stata pensata, sin dall’inizio, per soddisfare
diverse tipologie di utenti – l’home-user, le grandi LAN aziendali, gli Internet Service
Provider – oltre che per supportare efficientemente diversi tipi di reti preesistenti fra cui,
ovviamente, Internet
La rete EuroSkyWay è un sistema di telecomunicazione globale basato su una
costellazione di cinque satelliti geostazionari, in banda Ka e dotati di On-Board
processing, raggruppati in cluster di 1 o 2 satelliti
– la totalità dell’insieme di cluster è denominata EuroSkyWay World-Wide System (ESW-WS)
– ciascun cluster è denominato ESW Regional System (ESW-RS), o più semplicemente ESW
region
•
Per garantire le comunicazioni globali, ESW-WS realizza due tipi di comunicazione:
– Intra-regional communications,
cioè tra satelliti appartenenti allo
stesso cluster
– Inter-regional communications,
cioè sia tra satelliti ESW
appartenenti a differenti cluster,
che tra satelliti ESW e reti esterne
ESW World-wideSystem
( ESW-WS)
Cluster A
ESW Region
Cluster B
Cluster C
Demand Assignment
•
Demand assignment si ha quando il sistema satellitare ha un certo numero di
canali satellitari che sono allocati alle stazioni a terra su richiesta (per la
durata di una connessione)
– Management della allocazione dei satellite channel (SC) è responsabilità o
delle stazioni terrestri o di una network control station o di un TRM sul
satellite
– La stazione terrestre deve richiedere, e ad essa viene allocato, un canale
satellitare per mezzo di una interazione di segnalazione con una network
control station o l’altra stazione terrestre nel link o il TRM sul satellite
– Il link di comunicazione alla network control station può essere un canale
“dedicato” o un canale condiviso
– I link dedicati alla network control station possono essere su link non
satellitari, ma più comunemente su specifici canali satellitari di
segnalazione TDM preassegnati
ESW Regional System
•
•
•
Transponder satellitare a molti
canali
Provider Terminal (PrT)
Satellite Terminal (SaT)
•
•
•
•
Gateway (GTW)
Inter-system (InSS)
Network Operation Centre (NOC)
Satellite Operation Centre (SOC)
Network Operation Centre (NOC)
E’ responsabile nel fornire e garantire l’insieme di funzioni per il management
dell’intera ESW region. Esso è costituito da:
– Network Control Centre (NCC): responsabile del call/connection control
– Network Management Centre (NMC): responsabile del network management
– Customer Care Centre (CCC): responsabile del service management.
Satellite Operation Centre (SOC )
E’ responsabile del monitoraggio e del controllo dell’intero satellite, incluso il payload. Esso è
costituito da:
– Satellite Control Centre (SCC): responsabile del monitoraggio e del controllo del
satellite;
– Payload Operation System (POS): responsabile del monitoraggio e del controllo del
payload;
– CSM e IOT Manager: responsabili del testing dei transponders a bordo.
Satellite
E’ responsabile sia del management dinamico in frequenza delle risorse di
traffico, che della funzionalità di switching dei circuiti virtuali ESW. Esso è
costituito da:
– Traffic Resource Manager (TRM): responsabile della gestione delle richieste di
banda per connessioni ESW già esistenti;
– ESW Switching Fabric: responsabile dell’attività di routing delle connessioni
ESW;
Stazioni ESW
Sono responsabili dell’integrazione della rete ESW con un insieme di reti
terrestri. I tipi di ESW Stations previsti per ESW sono:
• Gateway (GTW) per link intra-regionali e
• Inter-system (InSS) per link inter-regionali
Terminali ESW
Sono responsabili di fornire l’accesso alla rete agli utenti ESW. I
tipi di terminali previsti per ESW sono:
• Provider Terminal (PrT) e
• Satellite Terminal (SaT)
ESW Region
Satelliti Sono responsabili sia della gestione
dinamica delle frequenze che dello switching
dei circuiti virtuali ESW. Sono costituiti da:
Traffic Resource Manager (TRM), responsabile
della gestione delle richieste di banda per
connessioni ESW;
ESW Switching Fabric, responsabile
dell’attività di routing delle connessioni ESW
Stazioni ESW Sono responsabili dell’integrazione della rete ESW con
un insieme di reti terrestri. I tipi di ESW Station previste per ESW
sono:
Gateway (GTW) per link intra-regionali e
Inter-system (InSS) per link inter-regionali
Terminali ESW Sono responsabili di fornire l’accesso alla rete agli
utenti ESW. I tipi di terminali previsti per ESW sono:
Provider Terminal (PrT) e
Satellite Terminal (SaT)
Network Operation Centre
(NOC) E’ responsabile nel
fornire e garantire l’insieme di
funzioni per il management
dell’intera ESW region. Esso è costituito da:
Network Control Centre (NCC), responsabile del controllo call/connection
Network Management Centre (NMC), responsabile del network management
Customer Care Centre (CCC), responsabile del service management
Satellite Operation
Centre (SOC)
E’ responsabile del
monitoraggio e del
controllo dell’intero
satellite. Esso è
costituito da:
Satellite Control
Centre (SCC),
responsabile del
monitoraggio e del
controllo del satellite;
Payload Operation
System (POS),
responsabile del
monitoraggio e del
controllo del payload;
CSM e IOT Manager,
responsabili del testing
dei transponders a
bordo.
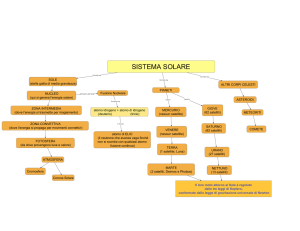
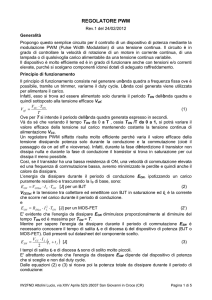
Parametri di QoS:
•
•
•
Densità di
probabilità
Parametri di QoS e di Traffico
Maximum Cell Transfer Delay
(max CTD): definito come il
massimo delay per la consegna di
Maximum cell transfer
una cella, misurato tra le UNI
delay (max CTD)
(User Network Interface) della
sorgente e della destinazione, che
Fixed
Peak-to-peak cell
Cells lost or
può essere accettato durante
delay
delay variation
delivered too
(CDV)
late
l’esistenza di una connessione
Peak-to-peak Cell Delay Variation (peak-to-peak CDV): rappresenta l’intervallo di
variazione del delay consentito alle celle durante il trasferimento attraverso la rete
Cell Loss Ratio (CLR): è definito come il rapporto tra il numero di celle perse ed il
numero totale di celle trasmesse per una connessione
Parametri di traffico:
•
•
•
Peak Data Rate (PDR): è definito come il massimo rate con cui il traffico è
generato;
Mean Data Rate (MDR): è definito come il rate medio con cui il traffico è generato.
Nel caso di applicazioni a data rate costante abbiamo che MDR=PDR;
Utilisation Factor (UF): è definito come il rapporto tra MDR e PDR. Rappresenta
una misura della burstiness della sorgente.
Cell
transfer
delay
Classi di servizio ESW
•
•
A ciascuna connessione ESW è associata una classe di servizio che identifica il tipo di traffico che la
connessione sarà in grado di garantire.
La rete ESW supporta quattro classi di servizio: A, B, C e D. Ciascuna classe è caratterizzata da
particolari valori dei descrittori di Traffico e dei parametri di QoS
Classe
Data Rate
UF
Max CTD
A = CBR
PDR, MDR
>0.9
≤ 350 ms
B = rt VBR
PDR, MDR
≤0.9
≤1s
C = nrt VBR
PDR, MDR
≤0.9
PDR
Non spec.
D = best effort
•
•
•
P-t-P CDV
CLR
≤ 100 ms
≤10-3
>100 e ≤ 400 ms
≤10-3
Non Sens.
Non Sens.
≤10-6
Non Sens.
Non Sens.
Non Sens.
La rete ESW sarà in grado di accettare o rifiutare una nuova richiesta di connessione sulla base di
questi parametri di contratto (procedura di Connection Admission Control).
In una connessione bidirezionale è possibile contrattare differenti valori dei parametri di QoS e di
Traffico per ciascuna direzione della connessione.
Alla classe di servizio A appartengono le applicazioni real time con Bit Rate costante (CBR), alla
classe B le applicazioni real time VBR, alla classe C le applicazioni non real time caratterizzate da
burstiness e per finire alla classe D le applicazioni che richiedono un trattamento best effort.
Classificazione
A = CBR
Relazione temporale tra Sorg. e Dest.
Bit Rate
Connection Mode
B = rt VBR
C = nrt VBR
Richiesta
Costante
D = best effort
Non richiesta
Variabile
Connection Oriented
Connection Less
Struttura a Frame
•
•
L’utilizzo delle risorse di banda è discretizzato nel tempo attraverso una particolare
struttura a Frame.
La gerarchia temporale comprende quattro livelli:
– Frame Unit (FU) consiste di 686 bits (per SaT-A, -B, -C) o di 684 bits (per PrT
-A, -B e GTW). La durata di una FU dipende dal tipo di portante, e quindi dal
tipo di terminale;
– Frame rappresenta l’unità elementare; esso è costituito da un insieme di n FU,
dove n dipende dal tipo di portante, e
quindi dal tipo di terminale. Il Frame
Terminale
F.U. / Frame
ha una durata temporale costante pari
SaT-A
10
a 26.5 ms, indipendentemente dal tipo
SaT-B
32
di portante;
SaT-C
128
– MultiFrame (MF) è costituito da un
PrT-A
384
insieme di 10 Frame consecutivi e ha una
PrT-B
2048
durata di 265 ms;
GTW
2048
– SuperFrame (SF) è costituito da 4 MF
InSS
2048
consecutivi; la sua durata è di 1060 ms.
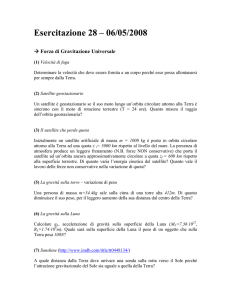
MAC ESW
Il livello MAC presente sui terminali
Upper Layer
terrestri ESW fornisce i seguenti servizi:
– accesso ai canali satellitari di uplink;
ESW Layer 3
– dispatching dai canali di downlink
ESW Layer 2-I ESW Layer 2-S
verso il relativo ESW Layer 2;
ESW MAC
– gestione dei processi di
sincronizzazione;
ESW Layer 1
– gestione delle risorse di traffico.
La cella ESW è caratterizzata da una lunghezza costante pari a 60 byte.
La cella è divisa in due parti:
– la sezione Payload, lunga 53 byte (52 byte +1 byte utilizzato per indicare il
numero di byte dummy contenuti nella cella);
– la sezione Header (o di Controllo), lunga 7 byte ed aggiunta in testa al
Payload.
Header
Byte 1
– ESW Virtual Connection Identifier
EVCI
Byte 2
(E-VCI): identifica univocamente
Byte 3
una connessione ESW; la sua
IBCR
Byte 4
lunghezza è pari a 24 bit;
Type
Flag
Entity-Id
Byte 5
– In Band Capacity Request (IBCR):
SN
Byte 6
rappresenta la capacità di banda
E
Byte 7
richiesta da una connessione attiva;
la sua lunghezza è pari a 8 bit;
– Type: identifica il tipo di messaggio (dati o controllo); la sua lunghezza è pari
a 2 bit;
– Flag (F): indica se la corrente cella rappresenta la parte iniziale (BOM),
intermedia (COM) o finale (EOM) di un messaggio o se si tratta di un
messaggio a singola cella (SCM). Inoltre, nel caso di EOM o SCM indica la
presenza di byte dummy; la sua lunghezza è pari a 3 bit;
– Entity-Id: identifica l’entità del livello superiore (es. IP); la sua lunghezza è di
3 bit;
– Sequence Number (SN): identifica univocamente una cella in una sequenza; la
sua lunghezza è pari a 15 bit;
– Error (E): è un bit utilizzato dal processo di decodifica per indicare se la cella
è caratterizzata da un tipo di errore non decodificabile.
Schemi di accesso al canale
•
•
Gli schemi di accesso al canale condiviso dipendono dal tipo di
terminale considerato e dal fatto che si consideri l’uplink o il
downlink.
Gli schemi di accesso supportati dalla rete ESW sono:
– Multi-Frequency Time Division Multiple Access (MF-TDMA) per i
terminali SaT-A, SaT-B e SaT-C sull’uplink;
– Time Division Multiple Access (TDMA) per i terminali PrT-A, PrTB e GTW sull’uplink;
– Time Division Multiplex (TDM) per tutti i terminali (SaT, PrT e
GTW) sul downlink.
Connessioni ad assegnamento garantito:
•
•
La rete EuroSkyWay implementa due diverse tipologie di connessione, che il MAC
deve trattare nel modo opportuno per quanto concerne la gestione delle risorse di
traffico:
– connessioni ad assegnamento garantito;
– connessioni ad assegnamento dinamico.
Una connessione è detta ad assegnamento
garantito se le risorse che richiede sono assegnate
alle parti coinvolte nel processo di comunicazione per l’intera durata della connessione.
Connessioni ad assegnamento dinamico:
•
•
Una connessione è detta, invece, ad assegnamento dinamico se le risorse, richieste dalla
stessa, non vengono dedicate per l’intera durata della chiamata
In un determinato processo di comunicazione, il componente di rete che origina il
traffico può richiedere di prolungare il tempo di trasmissione accordatogli.
– Se la parte trasmittente è ancora abilitata a inviare dati, questa procede formattando
una cosiddetta IBCR (In Band Capacity Request);
– Qualora, invece, il tempo di
utilizzo delle risorse a disposizione
dell’unità trasmittente sia scaduto,
quest’ultima procede formattando
una OBCR (Out of Band Capacity
Request).
ESW Layer 2 (LLC)
•
Il link layer control di EuroSkyWay
Upper Layer
fornisce le seguenti funzionalità:
ESW Layer 3
– segmentazione e riassemblaggio dei dati;
ESW Layer 2-I ESW Layer 2-S
– flow control ed error recovery.
ESW MAC
• È possibile identificare tre distinti sottolivelli LLC
ESW Layer 1
nell’architettura ESW:
– ESW Layer 2-I: consente lo scambio di dati tra una qualsiasi coppia di terminali
satellitari (SaT, PrT, GTW, InSS);
– ESW Layer 2-S: consente lo scambio di informazioni di controllo tra il Network
Operation Centre (NOC) e i terminali satellitari;
– ESW Layer 2-T (non rappresentato in figura): consente lo scambio di informazioni di
controllo tra il NOC e il TRM sul satellite.
• Il sottolivello ESW Layer 2-I fornisce due forme di servizio per il trasferimento dei
dati:
– Acknowledged procedures. Il servizio con riscontro è tipico delle applicazioni
delay-tolerant (ad esempio, Ftp, Web, E-mail) che hanno come requisito
fondamentale l’integrità dei dati trasmessi. Il servizio con riscontro, infatti, prevede
le procedure di Flow Control ed Error Recovery.
– Unacknowledged procedures. Il servizio senza riscontro, invece, è tipico delle
applicazioni real-time.
• I sottolivelli ESW Layer 2-S e ESW Layer 2-T implementano soltanto la segnalazione
(ovvero, lo scambio di messaggi di controllo) senza riscontro.