D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
Capitolo Quinto
Conversione
1. Materiali Semiconduttori
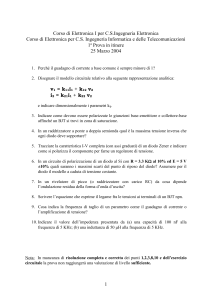
I materiali allo stato solido possono essere raggruppati in tre classi: gli isolanti, i
semiconduttori e i conduttori. Nella figura V.1 si riporta la conducibilità elettrica σ di alcuni
importanti materiali appartenenti alle tre classi. Gli isolanti, quali il vetro, hanno una
conducibilità molto bassa mentre i conduttori, quali il rame e l’alluminio, presentano una
conducibilità molto alta. I semiconduttori hanno conducibilità compresa tra quella degli
isolanti e quella dei conduttori. La conducibilità di un semiconduttore è in genere sensibile
alla temperatura, all’illuminazione, al campo magnetico e a minuscole quantità di atomi di
impurità. Questa sensibilità della conducibilità rende il semiconduttore uno dei più importanti
materiali per applicazioni elettroniche [6].
vetro
ossido di nichel
(puro)
diamante
(puro)
rame
silicio (Si)
alluminio
arsenurio di gallio (GaAs)
platino
zolfo
10-18
10-8
Isolanti
argento
germanio (Ge)
conducibilità σ [S/cm]
Semiconduttori
103
108
Conduttori
Fig. V.1: conducibilità elettrica di alcuni materiali allo stato solido.
Gli elementi semiconduttori possono essere composti da una singola specie di atomi, quali il
silicio (Si) e il germanio (Ge) oppure da due o più elementi come, ad esempio, l’arsenurio di
gallio, combinazione del gallio (Ga) e l’arsenico (As).
Lo studio dei materiali semiconduttori iniziò al principio del XIX secolo. All’inizio degli anni
50 il germanio era il più importante materiale semiconduttore (il primo transistor, ideato nei
laboratori Bell nel 1947, era un dispositivo al germanio). Il germanio si dimostrò però
inadatto a numerose applicazioni, dato che i dispositivi al germanio mostrano correnti di
dispersione di intensità elevata anche a temperature solo moderatamente alte. Inoltre, l’ossido
di germanio è solubile in acqua e quindi inadatto alla fabbricazione di dispositivi. Sin dai
primi anni 60 il silicio è diventato il sostituto pratico del germanio e da allora lo ha
virtualmente soppiantato come materiale per la fabbricazione di dispositivi a semiconduttori.
Le ragioni fondamentali che sono alla base dell’affermazione del silicio consistono nel fatto
che i dispositivi al silicio presentano correnti di dispersione molto inferiori, e nel fatto che il
Cap. V – Conversione
V.1
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
silicio di qualità sufficiente per costruire dispositivi costa molto meno degli altri materiali
semiconduttori. Al giorno d’oggi la tecnologia del silicio è di gran lunga la più avanzata tra
tutte le tecnologie dei semiconduttori.
Infine, numerosi semiconduttori composti hanno proprietà elettriche e ottiche che sono assenti
nel silicio. Questi semiconduttori, specialmente l’arsenurio di gallio (GaAs), sono impiegati
soprattutto in applicazioni nel campo delle microonde e dell’optoelettronica.
1.1 La giunzione pn
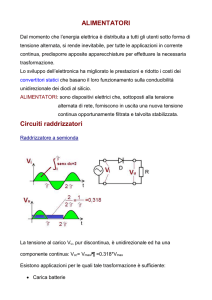
La giunzione pn, mostrata in figura V.2, è formata da un materiale semiconduttore di tipo p
messo in stretto contatto con un semiconduttore di tipo n [7]. In pratica, entrambe le regioni p
ed n fanno parte dello stesso cristallo di semiconduttore (ad esempio di silicio); la giunzione
pn viene realizzata a partire da un unico cristallo, creando regioni di differente “drogaggio”
(regione p e n) attraverso l’iniezione di “impurità” all’interno del reticolo cristallino, (come
viene descritto più avanti in questo stesso paragrafo). Come indicato in figura V.2, i
collegamenti esterni alle regioni p ed n (cioè i terminali della giunzione) sono realizzati con
contatti di metallo (ad esempio l’alluminio).
contatto metallico
contatto metallico
Silicio
di tipo p
Silicio
di tipo n
Fig. V.2: la giunzione pn.
La giunzione pn è alla base dei dispositivi elettronici come il diodo, il tiristore e il transistor.
Nel seguito si illustrano in maniera qualitativa i principi del funzionamento fisico della
giunzione pn, necessari per meglio comprendere il funzionamento e le caratteristiche esterne
dei dispositivi elettronici introdotti nei successivi paragrafi. Per i motivi esposti nel paragrafo
riguardante i materiali semiconduttori, si tratteranno i soli componenti al silicio.
1.1.1
Il silicio intrinseco
Un cristallo di silicio puro (o intrinseco) ha una struttura cristallina regolare in cui gli atomi
sono tenuti in posizione da legami covalenti, formati da i quattro elettroni di valenza propri di
ciascun atomo di silicio. A temperature sufficientemente basse tutti i legami covalenti sono
integri e non sono presenti elettroni liberi (o sono veramente pochi), disponibili per condurre
corrente elettrica. Tuttavia, a temperatura ambiente, parte dei legami vengono spezzati per
ionizzazione termica, liberando alcuni elettroni. Quando un legame covalente viene spezzato,
un elettrone abbandona il suo atomo di origine e, quindi, nell’atomo stesso si riscontra la
presenza di una carica positiva uguale, ma di segno opposto, alla carica dell’elettrone. Un
elettone appartenente ad un atomo vicino può essere attratto da questa carica positiva,
lasciando il suo atomo di origine. Questa azione colma il vuoto, la “lacuna” che esisteva nel
primo atomo ionizzato, ma crea una nuova “lacuna” nell’altro atomo. Tale processo può
Cap. V – Conversione
V.2
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
ripetersi di nuovo dando luogo effettivamente ad una carica positiva, detta appunto lacuna,
che si può muovere lungo tutta la struttura del cristallo e che è disponibile per il trasporto di
corrente elettrica.
La ionizzazione termica dà luogo ad elettroni e lacune in numero uguale e, quindi, in uguale
concentrazione. Gli elettroni liberi e le lacune si muovono casualmente attraverso la struttura
cristallina del silicio e, durante questo processo, alcune lacune sono riempite da elettroni.
Questo processo, detto di ricombinazione, porta alla scomparsa di lacune e di elettroni liberi
perché, all’equilibrio termico, la velocità di ricombinazione uguaglia la velocità di
ionizzazione.
1.1.2
Diffusione e deriva
Le lacune e gli elettroni possono muoversi all’interno di un cristallo di silicio attraverso due
meccanismi detti di diffusione e deriva. La diffusione è associata al moto casuale dovuto
all’agitazione termica. In un campione di silicio con concentrazione uniforme di elettroni
liberi e lacune, tale moto casuale non dà luogo ad un flusso netto di cariche (cioè ad una
corrente). Ma, se per qualche motivo, la concentrazione, per esempio degli elettroni liberi in
una parte del campione di silicio viene fatta diventare maggiore che in un’altra, gli elettroni
diffonderanno dalla regione ad alta concentrazione a quella con minore concentrazione. Il
processo di diffusione dà luogo ad un flusso di cariche, la corrente di diffusione (ID).
L’altro meccanismo con cui i portatori si spostano nei semiconduttori è la deriva. La deriva
dei portatori (elettroni liberi e lacune) si verifica quando un campo elettrico viene applicato ai
capi di un campione di silicio. Le lacune e gli elettroni sono accelerati dal campo elettrico ed
acquistano una componente della velocità (sovrapposta alla componente dovuta all’agitazione
termica) detta velocità di deriva. La conseguente corrente di lacune ed elettroni è detta
corrente di deriva (IS).
1.1.3
Semiconduttori drogati
Il silicio intrinseco descritto in precedenza è caratterizzato da concentrazioni uguali di
elettroni liberi e di lacune, originati dalla ionizzazione termica. I semiconduttori drogati sono
materiali in cui i portatori di un tipo (elettroni o lacune) sono presenti in numero maggiore
rispetto agli altri. Quando un campione di silicio viene drogato in modo che la maggior parte
dei portatori di carica siano elettroni, caricati negativamente, si parla di silicio di tipo n;
quando la maggior parte di portatori di carica sono lacune, cariche positivamente, si parla di
silicio di tipo p.
Il drogaggio di un cristallo di silicio per trasformarlo in tipo p o in tipo n si ottiene
introducendo in esso un piccolo numero di atomi di impurità. Per esempio, introducendo
atomi di un elemento pentavalente, quale il fosforo, si ha silicio di tipo n poiché gli atomi di
fosforo che prendono il posto degli atomi di silicio nel reticolo cristallino hanno cinque
elettroni di valenza, quattro dei quali formano legami con i vicini atomi di silicio, mentre il
quinto diviene un elettrone libero. Ogni atomo di fosforo dona un elettrone libero al cristallo
di silicio e l’impurità di fosforo prende il nome di “donatore”. Durante questo processo non
viene prodotta alcuna lacuna, per cui i portatori maggioritari, nel silicio drogato con il fosforo,
sono gli elettroni.
Per produrre silicio di tipo p, lo si deve drogare con una impurità trivalente, come il boro.
Ciascun atomo dell’impurità boro accetta un elettrone dal cristallo di silicio, in modo da poter
formare legami covalenti nel reticolo cristallino. Gli atomi di boro, drogante “accettore”,
danno luogo alle lacune che divengono portatori maggioritari.
Cap. V – Conversione
V.3
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
E’ importante osservare che, comunque, un campione di silicio n o di silicio p è
elettricamente neutro: i portatori maggioritari (elettroni o lacune) sono neutralizzati da cariche
localizzate associate con gli atomi di impurità.
1.1.4 La giunzione pn in condizioni di circuito aperto
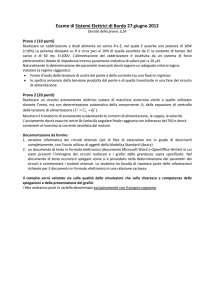
La figura 3a) mostra una giunzione pn in condizioni di circuito aperto, cioè con i terminali + e
– non connessi. I segni + nel materiale di tipo p indicano le lacune maggioritarie. La carica di
queste lacune è neutralizzata da un numero uguale di cariche negative associate agli atomi
accettori. I segni – nel materiale di tipo n indicano gli elettroni maggioritari. Anche in questo
caso la carica localizzata positiva associata agli atomi donatori neutralizza la carica negativa
degli elettroni. Dal momento che la concentrazione delle lacune è alta nel lato p e bassa nel
lato n, le lacune diffondono dal lato p al lato n; viceversa, gli elettroni diffondono dal lato n a
quello p. Queste due componenti si sommano per dar luogo alla corrente di diffusione, ID, che
va dal lato p al lato n. Le lacune che diffondono dal lato p al lato n si ricombinano
rapidamente con alcuni degli elettroni maggioritari presenti in quella zona e quindi escono di
scena. Questo processo di ricombinazione ha come risultato la scomparsa di alcuni elettroni
liberi dal materiale di tipo n. Quindi alcune lacune positive localizzate non saranno più
neutralizzate dagli elettroni liberi e la relativa carica rimane scoperta. Poiché la
ricombinazione avviene in prossimità dalla giunzione, sarà presente una regione che risulta
svuotata di elettroni liberi e che contiene cariche localizzate positive scoperte, così come
indicato in figura V.3a). Lo stesso processo avviene per gli elettroni che diffondono dal lato n
al lato p con la conseguenza che, nella regione di tipo p, in prossimità della giunzione sarà
presente una regione svuotata dalle lacune, che contiene cariche localizzate negative non
compensate, come mostrato in figura V.3a).
ID
a)
IS
Cariche localizzate
Lacune
Elettroni
+++++
+++++
+p+++
+++++
-
+
+
+
+
---------n-------
Regione svuotata
potenziale
b)
Regione di
barriera V0
x
Fig V.3: la giunzione pn in condizioni di circuito aperto; a) regione di svuotamento;
b) barriera di potenziale.
Cap. V – Conversione
V.4
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
Da quanto esposto, segue che esisterà una regione “svuotata” dei portatori da ambo le parti
della giunzione. Questa regione è detta appunto regione svuotata o regione di svuotamento.
La carica ai due lati della regione di svuotamento fa in modo che si stabilisca un campo
elettrico nella regione stessa che dà luogo ad una differenza di potenziale (potenziale di
barriera) ai capi della regione di svuotamento. Il potenziale di barriera è tale da opporsi alla
diffusione di lacune dal lato p al lato n e di elettroni dal lato n al lato p. Più è alta la barriera di
potenziale e più piccola è la corrente di diffusione ID.
1.1.5 La giunzione pn in condizioni di polarizzazione diretta
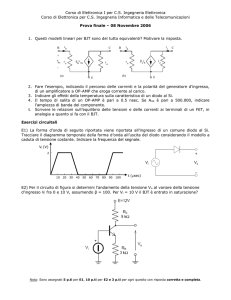
La polarizzazione diretta della giunzione pn, indicata in figura V.4, dà luogo ad un flusso di
elettroni che si muovono nel circuito esterno dal lato p al lato n; il flusso di elettroni, a cui è
associata la corrente diretta I, fa si che vengano estratte delle lacune dalla zona n e degli
elettroni dalla zona p. Ne deriva che, ad opera del circuito esterno, vengono forniti dei
portatori maggioritari ad entrambi i lati della giunzione: lacune nel materiale p ed elettroni nel
materiale n. Questi portatori maggioritari neutralizzano alcune delle cariche localizzate
scoperte (presenti nella regione di svuotamento), facendo diminuire la carica immagazzinata
nella regione di svuotamento. Quindi, la regione di svuotamento si assottiglia, mentre la
barriera di potenziale si riduce: la riduzione della barriera di potenziale permette ad un
numero maggiore di lacune di attraversarla, dal lato p al lato n, e ad un numero maggiore di
elettroni dai attraversarla, dal lato n al lato p. Perciò la corrente di diffusione, ID, aumenta
finché non si raggiunge l’equilibrio elettrico per ID-IS=I, dove I è la corrente diretta fornita dal
circuito esterno.
ID
IS
Lacune
+++++
+++++
+p+++
+++++
I
Elettroni
-
+
+
+
+
V
+
---------n-------
-
Fig. V.4: la giunzione pn in condizioni di polarizzazione diretta.
Poiché la corrente di deriva è indipendente dalla barriera di potenziale, l’effetto macroscopico
è che la corrente di diffusione si porta praticamente al valore della corrente I del circuito
esterno e la giunzione è quindi in grado di “chiudere” il circuito.
1.1.6 La giunzione pn in condizioni di polarizzazione inversa
La polarizzazione inversa della giunzione pn, indicata in figura V.5, dà luogo ad un flusso di
elettroni, a cui è associata la corrente I, che scorrono nel circuito esterno dal lato n al lato p.
Cap. V – Conversione
V.5
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
ID
IS
Lacune
+++++
+++++
+p+++
+++++
Elettroni
-
+
+
+
+
V
-
---------n-------
I
+
Fig. V.5: la giunzione pn in condizioni di polarizzazione inversa.
Si supponga che la corrente I sia minore della corrente di deriva IS: ciò si verifica se la
tensione applicata V risulta minore della cosiddetta tensione di breakdown (VBD). Questo
porterà gli elettroni ad abbandonare il materiale di tipo n e le lacune ad abbandonare il
materiale di tipo p. Gli elettroni liberi che lasciano il materiale n fanno aumentare il numero
di cariche localizzate positive che rimangono scoperte. Analogamente, la lacune che lasciano
il materiale p fanno aumentare il numero di cariche localizzate negative che rimangono
scoperte. Quindi, la corrente inversa I provoca un aumento della regione di svuotamento e
della carica in essa contenuta che, a sua volta, porta ad una tensione maggiore ai capi della
regione svuotata, cioè ad una barriera di potenziale V0 più elevata. La conseguenza è la
diminuzione della corrente di diffusione ID. La corrente di deriva rimane invece costante
poiché è indipendente dalla barriera di potenziale. Dunque, all’equilibrio elettrico risulta: ISID=I, e l’aumento della tensione di ai capi della regione di svuotamento si manifesta come una
tensione esterna tra i morsetti della giunzione, con il lato n positivo rispetto al lato p.
Il fenomeno appena decritto si verifica fin quando la tensione applicata alla giunzione risulta
minore della tensione VBD; se alla giunzione pn è applicata una tensione inversa superiore a
quella di breakdown, la corrente inversa I risulta maggiore della corrente di deriva IS e si
scatena un rapido processo, che per semplicità non si riporta, che può dar luogo ai cosiddetti
effetto valanga e effetto zener a seconda del valore della tensione di breakdown. I due effetti
non sono per forza distruttivi, ma lo diventano non appena si supera il massimo valore
ammesso per la dissipazione di potenza, con la conseguenza che la giunzione si “perfora” e
non è più in grado di funzionare come descritto.
1.2
Dispositivi a semiconduttore
In questo paragrafo si danno alcuni cenni circa le caratteristiche esterne (tensione - corrente)
di alcuni dispositivi oggi utilizzati nella conversione statica dell’energia [SE_S].
I dispositivi a semiconduttore utilizzati nei convertitori sono interruttori statici, con
caratteristiche esterne di vario tipo. Gli interruttori possono quasi sempre essere considerati
come ideali; vale a dire che i tempi caratteristici di commutazione tra i diversi stati (on e off),
ed alcune delle loro caratteristiche elettriche possono essere trascurate rispetto ai tempi ed alle
Cap. V – Conversione
V.6
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
grandezze tipiche dei convertitori di cui tali dispositivi costituiscono l’elemento base. In tal
modo, le caratteristiche del convertitore potranno essere esaminate più facilmente.
I dispositivi a semiconduttore oggi disponibili possono essere classificati in tre gruppi in
dipendenza dal loro grado di controllabilità. Tali gruppi sono:
•
Diodi: gli stati on (acceso) ed off (spento) sono controllati dal circuito di potenza;
•
Tiristori: commutati on (accesi) da un segnale di controllo, sono commutati off
(spenti) dal circuito di potenza oppure, in alcune applicazioni, da un opportuno
circuito di spegnimento.
•
Interruttori controllati: accesi e spenti da un segnale di controllo.
Nel seguito, si esamina il diodo, e si danno alcuni cenni circa le caratteristiche del tiristore.
Non si prenderanno invece in considerazione gli interruttori controllati.
1.2.1
Il Diodo
Nell’ambito degli scopi connessi alla stesura di questa dispensa, il diodo sarà considerato
come un dispositivo ideale al quale si suppone associata la Caratteristica Tensione-Corrente
ed il Simbolo riportati in figura V.6.
a)
i
A
b)
A
i
A
v
0
v
AK
AK
K
simbolo
Caratteristica ideale
Fig. V.6: il diodo, a) caratteristica ideale tensione – corrente; b) simbolo.
In altri termini, si considera il diodo come un interruttore ideale non controllato. Si dice non
controllato in quanto il fatto che si trovi in conduzione (on) oppure in interdizione (off)
dipende solo dalla tensione e dalla corrente del circuito in cui il diodo è inserito: il diodo sarà
on se la corrente di anodo è positiva (assunto il verso di fig. x) mentre sarà off se la tensione
tra Anodo (A) e Catodo (K) vAK è negativa1.
La caratteristica reale del diodo è mostrata in figura V.7: sono evidenziate la caduta di
tensione in polarizzazione diretta (VF) e la tensione di breakdown (VBD).
1
Per l’anodo si usa la lettera A mentre per il catodo si usa la lettera K dai termini greci ανοδοs e κατοδοs che
significano, rispettivamente, “strada di sopra” e “strada di sotto”.
Cap. V – Conversione
V.7
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
i
A
VBD
v
0 VF
AK
Caratteristica reale
Fig. V.7: caratteristica reale tensione - corrente.
Risulta quindi che nell’idealizzare la caratteristica del diodo si sono trascurate la corrente di
dispersione in polarizzazione inversa (tipicamente dell’ordine delle decine di mA) e la caduta
di tensione in polarizzazione diretta VF (tipicamente inferiore al Volt) ed inoltre si è supposto
che la massima tensione di polarizzazione inversa risulti inferiore alla tensione di breakdown,
VBD, che va dalla decina a qualche migliaio di Volt in dipendenza del tipo di diodo.
1.2.2
Il Tiristore
Il simbolo, la caratteristica ideale e quella reale del tiristore sono mostrati in figura V.8.
a)
i
i
A
b)
A
v
i
c)
A
i
A
iG
iG
VBD
AK
G
v
0
G
K
simbolo
AK
Caratteristica ideale
0 VF
Caratteristica reale
Fig. V.8: il tiristore, a) simbolo; b) caratteristica ideale tensione – corrente;
c) caratteristica reale tensione – corrente.
Il funzionamento del tiristore si può spiegare tenendo presente che:
•
per accenderlo, bisogna applicare un segnale di corrente positivo alla gate (G) mentre
la tensione tra anodo e catodo (vAK) è positiva;
•
una volta acceso, il tiristore resta tale indipendentemente dalla presenza o meno del
segnale sulla gate fino a quando la corrente di anodo (iA) non si annulla, cioè, in questa
fase, il tiristore si comporta come un diodo;
•
per spegnere il tiristore è necessario contropolarizzarlo, ovvero è necessaria una
tensione tra anodo e catodo negativa.
1.3 Conversione CA/CC
I convertitori CA/CC o raddrizzatori sono largamente utilizzati in tutte quelle applicazioni in
cui è necessario alimentare carichi in continua a partire da un’alimentazione in alternata. I
Cap. V – Conversione
V.8
v
AK
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
raddrizzatori sono impiegati, ad esempio, per l’alimentazione dei circuiti elettronici, nei
controlli di tipo industriale o di processo, negli azionamenti con regolazione della velocità e
nei processi elettrolitici dell’industria chimica.
In questo paragrafo verranno descritte diverse tipologie di questi convertitori. In particolare, si
partirà dallo studio di tipologie elementari, in presenza di diversi tipi di carico, per fornire i
concetti base della conversione alternata – continua; quindi si affronterà lo studio di
configurazioni più complesse a ponte monofase e trifase.
La classificazione delle diverse topologie di convertitori CA/CC è caratterizzata dal numero
di vie di conduzione, spesso indicato con la lettera q, che si definisce come il numero dei
diversi percorsi che può avere la corrente nel circolare dal lato in alternata a quello in
continua in un periodo della tensione di alimentazione.
1.3.1
Raddrizzatori ad una via di conduzione
Nei raddrizzatori ad una via di conduzione (q = 1) il percorso della corrente
dall’alimentazione al carico è unico; per motivi che saranno chiariti nel seguito, queste
configurazioni si dicono anche ad una semionda.
1.3.1.1 Carico resistivo
Il raddrizzatore ad una via di conduzione con carico resistivo è mostrato in figura 9. Si
supponga che la tensione di alimentazione, va, sia sinusoidale esprimibile come:
va = Va sin(ωt ) ,
essendo ω la pulsazione di alimentazione (misurata in radianti al secondo) e t il tempo. Si
definisce angolo elettrico il prodotto θ = ωt. In ogni istante vale la relazione:
va = v AK + v0 ,
dove con vAK e v0 si sono indicate rispettivamente la tensione tra catodo e anodo del diodo e
quella sul carico.
ia
+
va ~
vAK
i0
v0
R
Fig. V.9: raddrizzatore ad una via di conduzione con carico resistivo.
Si assuma il diodo ideale; supponendo che all’istante iniziale la corrente i0 sia nulla, allora,
essendo la tensione sul carico esprimibile come v0 = Ri0, si ha che va = vAK. Quando la va tende
a diventare positiva, il diodo entra in conduzione e, quindi, consente il passaggio di corrente.
In questa fase, e cioè per θ ∈ ]0, π], il diodo è un corto circuito per cui la tensione sul carico è
uguale a va e la corrente i0 = ia = va/R. Quando va si inverte, e cioè per θ ∈ ]π, 2π], il diodo si
spegne poiché risulta contropolarizzato, e, poiché è un dispositivo unidirezionale , impedisce
il passaggio di corrente. Quindi, la corrente i0 si annulla come pure la tensione sul carico v0.
Questa situazione permane fin quando θ ∈ ]π, 2π], dopodiché si ripresenta la situazione
Cap. V – Conversione
V.9
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
descritta in precedenza in cui il diodo conduce. Il ragionamento fin qui riportato conduce agli
andamenti di tensione e corrente riportati in figura V.10.
a)
va [V]
100
60
20
0
-20
-60
-100
π
0
2π
3π
4π
θ [rad]
100
b)
v0 [V]
60
20
0
-20
-60
-100
π
0
2π
4π
3π
θ [rad]
c)
15
ia = i0 [A]
10
5
0
-5
-10
-15 0
π
2π
4π
3π
θ [rad]
Fig. V.10: grandezze elettriche del circuito di figura V.9;
a) tensione di alimentazione; b) tensione sul carico; c) corrente nel diodo.
Risulta chiaro che la tensione sul carico ha un valore medio diverso da zero (precisamente
vale Va/π, come banalmente calcolabile).
1.3.1.2 Carico ohmico - induttivo
Si consideri ora il caso in cui il carico sia costituito dalla serie di una resistenza e di una
induttanza (carico ohmico - induttivo). Lo schema del circuito è mostrato in figura V.11.
ia
+
va ~
i0
vAK
v0
R
L
Fig. V.11: raddrizzatore ad una via di conduzione con carico ohmico - induttivo.
Cap. V – Conversione
V.10
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
Vale la seguente relazione:
va = v AK + v0 = v AK + Ri0 + L
di0
;
dt
si supponga che, all’istante iniziale, la corrente i0 sia nulla. Per θ ∈ ]0, π], la tensione va
positiva “forza” una corrente i0 positiva, il diodo entra in conduzione (e si può considerare
come un corto circuito) e la corrente i0 seguirà il tipico transitorio di un circuito RL con
alimentazione sinusoidale. A parte un diverso transitorio di corrente, fino a θ = π, il
funzionamento del raddrizzatore di figura V.11 è simile a quello visto nel caso di carico
resistivo. Per θ = π la tensione va si annulla ma non altrettanto la corrente i0 poiché la tensione
Ldi0/dt forza ancora la conduzione del diodo (l’induttanza funzione come generatore).
Dunque, la tensione sul carico, v0, non si annulla a θ = π ma ha una “coda” negativa a causa
della caduta sull’induttanza. Nel momento in cui la corrente i0 si annulla, il diodo risulta
contropolarizzato e si spegne e la v0 si annulla restando tale fino a θ = 2π dove ricomincia lo
stesso funzionamento fin qui descritto. Le forme d’onda di tensione e corrente sono riportate
in figura V.12.
a)
va [V]
100
60
20
0
-20
-60
-100
0
π
2π
3π
4π
θ [rad]
v0 [V]
100
b)
60
20
0
-20
-60
-100
0
π
2π
3π
4π
θ [rad]
15
c)
ia = i0 [A]
10
5
0
-5
-10
-15 0
π
2π
3π
4π
θ [rad]
Fig. V.12: grandezze elettriche del circuito di figura 11;
a) tensione di alimentazione; b) tensione sul carico; c) corrente nel diodo.
Cap. V – Conversione
V.11
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
Come facilmente riscontrabile dalla figura V.12, la presenza dell’induttanza causa, rispetto al
caso di carico resistivo, una riduzione del valore medio di tensione sul carico per la presenza
della coda negativa di tensione. Inoltre, per il raddrizzatore in esame la corrente si annulla (nel
periodo dell’alimentazione) prima che parta la nuova semionda positiva dell’alimentazione va.
Questo tipo di funzionamento è detto conduzione discontinua di corrente (Discontinuous
Current Mode, DCM). Per altre tipologie di raddrizzatori è possibile che la corrente nel carico
a regime non si annulli all’interno del periodo. Questa condizione operativa va sotto il nome
di conduzione continua di corrente (Continuous Current Mode, CCM).
Per evitare gli effetti descritti prima, si può modificare il circuito di figura V.11 inserendo il
cosiddetto diodo di libera circolazione (freewheeling diode) così come mostrato in figura
V.13.
ia
+
va ~
vAK
i0
ifw
v0
Dfw
R
L
Fig. V.13: raddrizzatore ad una via di conduzione con carico ohmico – induttivo
e diodo di libera circolazione.
In questo circuito, quando la tensione va si annulla il diodo di libera circolazione entra in
conduzione e mantiene nulla la tensione v0 evitando la coda negativa e provocando la
“scarica” della corrente i0 sulla resistenza R. Gli andamenti di tensione e corrente sono
riportati in figura V.14.
Inoltre, la presenza del diodo di libera circolazione rende possibile il CCM poiché la corrente
nell’induttanza va rigorosamente a zero solo dopo un tempo infinito2.
Quanto maggiore è l’induttanza di carico tanto meno variabile risulta la corrispondente
corrente (i0). In particolare, se si assume che l’induttanza sia molto elevata, nel senso che la
costante di tempo L/R è molto maggiore del periodo della tensione di alimentazione, va, allora
si può, con buona approssimazione, affermare che la corrente nel carico è costante.
2
Matematicamente, la durata della scarica è infinita poiché l’andamento è di tipo esponenziale decrescente.
Ingegneristicamente, la si può considerare esaurita, e quindi la corrente si può considerare nulla, dopo un tempo
pari a 4÷5 volte la costante di tempo del circuito RL.
Cap. V – Conversione
V.12
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
va [V]
100
a)
60
20
0
-20
-60
-100
π
0
2π
3π
4π
θ [rad]
100
b)
v0 [V]
60
20
0
-20
-60
-100
π
0
2π
3π
4π
θ [rad]
15
c)
10
i0 [A]
5
0
-5
-10
-15
0
π
2π
3π
4π
θ [rad]
Fig. V.14: grandezze elettriche del circuito di figura 13;
a) tensione di alimentazione; b) tensione sul carico; c) corrente nel carico.
Cap. V – Conversione
V.13
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
1.3.1.3 Carico con induttanza infinita
Portando al limite il ragionamento precedente, si può considerare un carico con induttanza
infinita (L = ∞) assumendo, quindi, rigorosamente costante la corrente nel carico. Tale
ipotesi, pur non essendo rigorosamente verificata, non è lontana dalla realtà nel caso si
assuma come carico, ad esempio, il modello di un motore elettrico; ma, soprattutto, viene
introdotta in quanto consente una notevole semplificazione nell’analisi delle grandezze
elettriche tipiche dei convertitori CA/CC.
Il raddrizzatore ad un via di conduzione con carico L = ∞ è mostrato in figura V.14 mentre
l’andamento delle tensioni e delle correnti è mostrato in figura V.15A.
ia
+
va ~
D
vAK
ifw
Dfw
I0
L = ∞ v0
Fig. V.15A: raddrizzatore ad una via di conduzione con carico L = ∞
e diodo di libera circolazione.
La corrente nel carico è pari a I0 ed è costante, la corrente nell’alimentazione è pari ad I0 solo
per θ ∈ ]0, π], cioè solo quando conduce il diodo D, mentre per θ ∈ ]π, 2π] è nulla in quanto
la corrente costante nel carico è sostenuta dal diodo di libera circolazione. La tensione sul
carico non cambia rispetto al caso precedente assumendo il solito andamento ad una
semionda.
Cap. V – Conversione
V.14
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
a)
va [V]
100
60
20
0
-20
-60
-100
0
π
2π
3π
4π
θ [rad]
b)
100
v0 [V]
60
20
0
-20
-60
-100
0
π
2π
3π
4π
θ [rad]
c)
14
ia [A]
10
8
4
0
0
π
2π
3π
4π
θ [rad]
d)
14
ifw [A]
10
8
4
0
0
π
2π
3π
4π
θ [rad]
e)
14
I0 [A]
10
8
4
0
0
π
2π
3π
4π
θ [rad]
Fig. V.15B: grandezze elettriche del circuito di figura V.14;
a) tensione di alimentazione; b) tensione sul carico; c) corrente nel diodo D;
d) corrente nel diodo Dfw e) corrente nel carico.
Cap. V – Conversione
V.15
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
Molto spesso l’alimentazione dei raddrizzatori è costituita dal secondario di un trasformatore.
In tal caso non è possibile trascurare la presenza a monte del raddrizzatore stesso di un
induttanza di linea Lc detta induttanza di commutazione. Una immediata conseguenza della
presenza di Lc è che le forme d’onda di corrente relative all’alimentazione e al diodo di libera
circolazione, in precedenza assunte discontinue, ora non possono più esserlo (si ricordi che la
corrente in un induttore non può essere discontinua). In altri termini, come si espliciterà
meglio in seguito, l’induttanza di commutazione “ritarda” la commutazione stessa. Per il
momento, si osservi solo lo schema di figura V.16 e le relative forme d’onda in figura V.17.
Lc ia
+
va ~
D
vAK
ifw
Dfw
I0
L = ∞ v0
Fig. V.16 : raddrizzatore ad una via di conduzione con carico L = ∞,
diodo di libera circolazione ed induttanza di commutazione.
Cap. V – Conversione
V.16
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
a)
va [V]
100
60
20
0
-20
-60
-100
0
π
2π
3π
4π
θ [rad]
b)
100
v0 [V]
60
20
0
-20
-60
-100
0
π
2π
3π
4π
θ [rad]
c)
14
ia [A]
10
8
4
0
0
π
2π
3π
4π
θ [rad]
d)
14
ifw [A]
10
8
4
0
0
π
2π
3π
4π
θ [rad]
e)
14
I0 [A]
10
8
4
0
0
π
2π
3π
4π
θ [rad]
Fig. V.17: grandezze elettriche del circuito di figura 16;
a) tensione di alimentazione; b) tensione sul carico; c) corrente nel diodo D;
d) corrente nel diodo Dfw e) corrente nel carico.
Cap. V – Conversione
V.17
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
1.3.1.4 Carico resistivo con filtro capacitivo
La natura pulsante della tensione di uscita dei circuiti discussi in precedenza la rende
inutilizzabile come tensione continua. Per questo motivo, in cascata ai raddrizzatori sono posti
opportuni circuiti che “stabilizzano” ulteriormente la tensione continua da fornire al carico.
Tuttavia, una semplice soluzione a questo problema consiste nel collegare un condensatore in
parallelo al carico. Si consideri il circuito di figura 18, in cui il carico è considerato, per
semplicità, resistivo. Il circuito di figura 18 è spesso chiamato rivelatore di picco poiché è in
grado di fornire in uscita una tensione con valore medio molto prossimo al valore di picco
della tensione di alimentazione.
ia
+
va ~
i0
vAK
C
v0
R
Fig. V.18: il rivelatore di picco.
Il circuito funziona nel modo seguente: in corrispondenza di un ingresso sinusoidale, il
condensatore si carica fino alla massima tensione di ingresso (Va). Non appena la tensione di
alimentazione decresce dal suo massimo, il condensatore comincia a scaricarsi sulla resistenza
R e, dal momento che la tensione vAK risulta negativa, il diodo viene contropolarizzato e si
spegne. La scarica del condensatore, che dipende dalla costante di tempo RC del circuito, dura
fino a che la tensione di alimentazione non raggiunge un valore tale da superare la tensione ai
capi del condensatore che, ovviamente, coincide con la tensione sul carico v0. Quindi, il diodo
si riaccende, poiché vAK risulta ora positiva, e il condensatore comincia una nuova fase di
ricarica. Questo ragionamento porta alle forme d’onde mostrate in figura 19.
Cap. V – Conversione
V.18
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
a)
va [V]
100
60
20
0
-20
-60
-100
0
π
2π
3π
4π
θ [rad]
va [V]
100
b)
60
20
0
-20
-60
-100
0
π
2π
3π
4π
θ [rad]
c)
ia [A]
100
50
0
-50
-100
0
π
2π
3π
4π
θ [rad]
Fig. V.19: grandezze elettriche del circuito di figura 18;
a) tensione di alimentazione; b) tensione sul carico; c) corrente nel diodo.
Si osservi come, in questo circuito, la tensione di uscita sia molto meno pulsante di quanto
avvenisse per le configurazioni mostrate in precedenza. In particolare, tanto più è grande la
costante di tempo del circuito (e cioè, a parità di resistenza, quanto più grande è il valore della
capacità C) tanto più piccola sarà “l’ondulazione” (ripple) sovrapposta al valore medio. Per
ultimo, si noti l’ andamento della corrente assorbita dall’alimentazione, ia, giustificato dal
fatto che il diodo conduce solo per un breve intervallo di tempo e cioè solo durante la fase di
carica del condensatore.
1.4 Raddrizzatori monofase a ponte
Le configurazioni ad una via di conduzione non sono utilizzate nella pratica per diversi
motivi. Il motivo principale consiste nel fatto che il circuito non viene utilizzato nel pieno
delle sue potenzialità, nel senso che si sfrutta solo la semionda positiva della tensione di
alimentazione. Per ovviare a questo inconveniente si utilizzano le cosiddette strutture a ponte.
La figura 20 mostra il raddrizzatore monofase a ponte con carico L = ∞, detto anche a doppia
semionda per i motivi che saranno chiari tra breve. Questa configurazione è caratterizzata da 2
vie di conduzione (q = 2).
Cap. V – Conversione
V.19
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
ia
1
I0
3
+
va ~
L=∞
4
v0
2
Fig. V.20: raddrizzatore monofase a ponte con carico L = ∞.
Semplici considerazioni consentono di affermare che condurranno i diodi D1 e D2 per θ ∈ ]0,
π] ed i diodi D3 e D4 per θ ∈ ]π, 2π]. Infatti, se si suppone di partire da θ = 0 e che stiano
conducendo i diodi D1 e D2, la tensione sul carico sarà:
v0 = v a > 0 ,
e le tensioni tra gli anodi ed i catodi dei diodi D3 e D4 saranno:
v AK 3 = v AK 4 = −v0 < 0 .
Quindi, i diodi D3 e D4 risultano contropolarizzati, ma solo fino a quando la tensione sul
carico non tende a diventare negativa. In questo punto, e cioè per θ = π, i diodi D3 e D4
cominciano a condurre fornendo una tensione sul carico pari a:
v0 = −v a > 0 .
Dunque, per θ ∈ ]π, 2π], i diodi D1 e D2 risultano contropolarizzati poiché, in questa
situazione, risulta:
v AK 1 = v AK 2 = −v0 < 0 .
Questa nuova condizione di funzionamento permane fino a θ = 2π, dopodiché si riparte dalla
condizione iniziale in cui conducono i diodi D1 e D2. L’andamento delle tensioni e delle
correnti è mostrato in figura V.21.
Cap. V – Conversione
V.20
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
a)
va [V]
100
60
20
0
-20
-60
-100
0
π
2π
3π
4π
θ [rad]
va [V]
100
b)
60
20
0
-20
-60
-100
0
π
2π
3π
4π
θ [rad]
15
c)
10
ia [A]
5
0
-5
-10
-15
0
π
2π
3π
4π
θ [rad]
d)
15
I0 [A]
10
5
0
-5
0
π
2π
3π
4π
θ [rad]
Fig. V.21: grandezze elettriche del circuito di figura 20;
a) tensione di alimentazione; b) tensione sul carico;
c) corrente assorbita lato CA; d) corrente nel carico.
La presenza dell’induttanza di commutazione modifica la configurazione del circuito di figura
V.20 in quella mostrata in figura V.22. Una immediata conseguenza della presenza di Lc è,
come nel caso delle altre topologie, l’impossibilità che la corrente di alimentazione ia, risulti
discontinua: l’induttanza di commutazione “ritarda” la commutazione. Le forme d’onda
relative a al circuito di figura V.22 sono mostrate in figura V.23.
Cap. V – Conversione
V.21
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
Lc
ia
1
3
I0
+
va ~
L=∞
4
v0
2
Fig. V.22: raddrizzatore monofase a ponte con carico L = ∞
ed induttanza di commutazione.
Cap. V – Conversione
V.22
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
a)
va [V]
100
60
20
0
-20
-60
-100
0
π
2π
3π
4π
θ [rad]
va [V]
100
b)
60
20
0
-20
-60
-100
0
π
2π
3π
4π
θ [rad]
15
c)
10
ia [A]
5
0
-5
-10
-15
0
π
2π
3π
4π
θ [rad]
d)
15
I0 [A]
10
5
0
-5
0
π
2π
3π
4π
θ [rad]
Fig. V.23: grandezze elettriche del circuito di figura V.22;
a) tensione di alimentazione; b) tensione sul carico;
c) corrente assorbita lato CA; d) corrente nel carico.
2
Raddrizzatori Trifase a Ponte
2.1 Ponte a diodi
Uno dei circuiti più utilizzati per la conversione da alternata a continua, è il ponte di diodi
trifase, il cui schema di principio è mostrato in figura V.24 [3]: il ponte funziona in modo tale
che, partendo dalle tensioni in alternata (Vab, Vbc, Vca), in uscita si osserva una tensione
continua (Vdc) con una ondulazione (ripple) sovrapposta.
Cap. V – Conversione
V.23
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
+
1
2
3
A
AC
C
5
6
DC
vdc
B
4
-
Fig. V.24: Schema di principio di un raddrizzatore
trifase a ponte di diodi.
Questa configurazione si dice a sei vie di conduzione (six-pulse) perché esistono 6 “diverse”
configurazioni circuitali cui corrispondono 6 diversi percorsi che può avere la corrente nel
circolare dal lato in alternata a quello in continua in un periodo della tensione di
alimentazione.
Per illustrare il principio di funzionamento del raddrizzatore a diodi si supponga che:
1) l’alimentazione in alternata sia ideale, costituita cioè da una terna simmetrica di
tensioni sinusoidali;
2) siano trascurabili le induttanze del lato in alternata;
3) il carico sia ideale (L =∞);
4) sia trascurabile il tempo di spegnimento dei diodi;
Si osservi subito che, data la natura del carico, la corrente in uscita al raddrizzatore, Idc, è
perfettamente costante.
Idc
+
ea
1
~
ec
~
2
L= ∞
3
A
~
V dc
B
eb
C
6
5
4
-
Fig. V.25: La configurazione circuitale
nelle ipotesi di funzionamento ideale.
La sequenza di accensione dei diodi del ponte è illustrata in figura V.26: ciascun diodo
conduce per 120° elettrici e, come detto prima, esistono 6 vie di conduzione che conducono
ciascuna per 60° elettrici, ovvero per ωt* = 2π/q, q = 6. Ad esempio, allorché conduce la
coppia di diodi (1,5), il che equivale a dire che la tensione Vab risulta maggiore delle tensioni
Vac e Vcb, allora per 60° elettrici la tensione Vdc in uscita al ponte sarà proprio Vab.
Cap. V – Conversione
V.24
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
+
+
a)
b)
3
3
1
A
A
Vdc=Vcb
B
C
C
5
6
Vdc=Vab
B
5
-
-
VCB>VAB, VCA
VAB>VAC, VCB
c)
d)
+
+
1
2
1
A
A
Vdc=Vac
B
C
5
Vdc=Vbc
B
C
4
4
-
-
VAC>VAB, VBC
e)
VBC>VBA, VAC
f)
+
+
2
Vdc=Vba
B
C
6
3
2
A
A
B
C
Vdc=Vca
6
4
-
-
VBA>VBC, VCA
VCA>VBA, VCB
Fig. V.26: Le sei vie di conduzione.
Dalla figura V.26 a), b), c), d), e) ed f), in cui i due diodi in neretto conducono mentre il terzo
si è appena spento, si nota che il passaggio da una via di conduzione a quella successiva non
avviene forzatamente ma in modo naturale (dipende solo dalle tensioni concatenate che
determinano quale coppia di diodi, uno sulla gamba superiore ed uno sulla gamba inferiore,
conduce) ed è per tale motivo che questo tipo di raddrizzatore è detto “a commutazione
naturale” La conseguenza dell’alternarsi delle vie di conduzione è che la forma d’onda della
tensione continua, Vdc, in uscita al raddrizzatore presenta un andamento del tipo riportato in
figura V.27 (curva in neretto), in cui sono riportate anche le tensioni concatenate e le coppie
di diodi in conduzione: essa è costituita dall’inviluppo delle tensioni concatenate di maggior
valore.
Cap. V – Conversione
V.25
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
(3, 5)
0
0
(1, 5)
(1, 4)
(2, 4)
(2, 6)
(3, 6)
(3, 5)
2π
π /3
Fig. V.27: La tensione continua in uscita al raddrizzatore
in condizioni ideali.
L’aver supposto l’assenza di induttanze lato alimentazione, comporta che le correnti lato
alternata si portino istantaneamente dal valore Idc a zero o viceversa; nei circuiti reali la
presenza di induttanze di dispersione rende impossibili tali discontinuità di corrente e, quindi,
il passaggio da una via di conduzione ad un’altra avviene in un tempo non nullo o,
equivalentemente, in un angolo elettrico (angolo di overlap) spesso indicato con µ. Come
conseguenza si ha che la tensione sul carico, Vdc, presenta un andamento diverso da quello
mostrato in precedenza e che può essere esemplificato così come riportato in figura V.28.
Cap. V – Conversione
V.26
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
(3, 5)
(1, 5)
(1, 4)
(2, 4)
(2, 6)
(3, 6)
(3, 5)
µ
0
0
(1, 5, 4)
(1, 3, 5)
(2, 1, 4)
(2, 4, 6)
(3, 2, 6)
(3, 6, 5)
π/6
Fig. V.28: La tensione continua in uscita al raddrizzatore
in presenza di induttanze di dispersione sul lato in alternata.
2π
Per chiarire tale meccanismo, detto “commutazione reale”, supponiamo di essere all’angolo θ
= π/6, cioè nel momento in cui alla conduzione del diodo 3 dovrebbe sostituirsi quella del
diodo 1. La presenza delle induttanze di linea relative alle fasi A e C determina una nuova
configurazione del raddrizzatore che è riportata in figura V.29 in cui si osserva che sono in
conduzione contemporanea tre diodi (1,3,5).
I dc
d
ia
ea
~
3
A
o
ec
1
L
~
~
B
eb
C
ib
ic
V dd’ =
V cb +V ab
2
5
d’
Fig. V.29: La commutazione reale.
La corrente ic deve portarsi da Idc a zero (e viceversa per ia) ed in particolare, durante tale fase
di funzionamento, si ha che istantaneamente:
IDC=IA+IC
Cap. V – Conversione
IDC=-IB .
V.27
(5)
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
Per valutare gli effetti di questo fenomeno sulla tensione sul carico si può osservare che:
Vdo ( t ) = e a ( t ) − L
d
i a (t)
dt
Vdo ( t ) = e c ( t ) − L
d
i c (t)
dt
Vd 'o ( t ) = e b ( t ) − L
d
i b (t)
dt
(6)
dunque, sommando membro a membro le prime due relazioni della (6), tenuto conto che
d
d
d
L I dc = 0 e quindi L i b = 0 e L (i a (t ) + i c (t )) = 0 , si ha:
dt
dt
dt
d
d
i a (t) − L i c (t)
dt
dt
(7)
e a (t) + e c (t)
V ( t ) + Vab ( t )
− e b ( t ) = cb
2
2
(8)
2 ⋅ Vdo ( t ) = e a ( t ) + e c ( t ) − L
e dalle (5), (6) e (7) si può quindi stabilire che:
Vdd ' ( t ) =
Dunque il passaggio dalla via di conduzione caratterizzata dalla coppia di diodi (3,5) a quella
(1,5), non avviene istantaneamente ma in un angolo elettrico, µ, durante il quale la tensione in
uscita al raddrizzatore si porta al valore indicato dalla (8).
Poiché lo stesso fenomeno si ripete per le altre commutazioni, particolarizzando
opportunamente la (8) è facile capire l’andamento della forma d’onda di tensione mostrata in
figura 28.
Il raddrizzatore a ponte di diodi presenta essenzialmente due svantaggi:
a) non può essere variato il valore medio della tensione in uscita;
b) il flusso di potenza è unidirezionale, quindi non può essere utilizzato nei casi in cui si
renda necessaria l’inversione corrente continua – corrente alternata.
2.2 Ponte a tiristori
Se si sostituiscono ai diodi degli interruttori di potenza come il tiristore (chiamato anche
Silicon Controlled Rectifier, SCR) è possibile superare gli svantaggi sopraelencati [3]. Come
visto nel paragrafo 1.2.2, il tiristore è un interruttore di potenza a tre terminali, anodo, catodo
e gate, dalla particolare caratteristica Corrente-Tensione; in pratica è pilotabile, dalla gate, in
accensione ma si spegne naturalmente (a volte si dice impropriamente che è un ibrido tra un
transistor e un diodo nel senso che si accende come un transistor ma si spegne come un
diodo). Un raddrizzatore a ponte realizzato con SCR si dice “totalmente controllato”: è
possibile, ritardando l’accensione degli SCR, variare il valore medio della tensione in uscita e,
inoltre, invertire la direzione del flusso di potenza.
Cap. V – Conversione
V.28
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
V d c (t) [ V ]
α = 3 0 °µ = 0 °
10000
a)
8000
6000
4000
2000
0
V d c (t) [ V ]
0
t [s ]
α = 6 0 °µ = 0 °
10000
0 .0 2
b)
8000
6000
4000
2000
0
V d c (t) [ V ]
0
10000
t [s ]
α = 9 0 °µ = 0 °
0 .0 2
c)
5000
0
-5 0 0 0
0
t [s ]
0 .0 2
Fig. V.30: Tensione ai morsetti in continua di un ponte trifase totalmente
controllato, nelle ipotesi di commutazione ideale, per tre valori di α.
Come si può osservare dalla figura 30, ritardando l’accensione dei tiristori, di un angolo
elettrico pari ad α, si ottiene una variazione della forma d’onda in uscita, ed una conseguente
diminuzione del valore medio.
In particolare vale:
dove:
V dc = V m ⋅ c o s α
• Vdc è il valore medio della tensione in uscita dal convertitore;
• Vm è il valore medio in uscita in assenza di ritardi di accensione (α=0°).
Cap. V – Conversione
V.29
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
Quindi se si ritarda di 90° l’accensione dei tiristori, si ottiene un’uscita con valore medio
nullo. Inoltre se la corrente si mantiene costante e sempre positiva sul lato in continua, è
possibile ritardare l’accensione dei tiristori di valori superiori ai 90°. Così facendo la tensione
in uscita si inverte mentre la corrente resta positiva [3]. Quindi il flusso di potenza questa
volta dal carico si trasferisce all’alimentazione. In pratica il carico deve forzare la circolazione
della corrente per soddisfare la condizione esposta.
Le curve mostrate in figura 30 si riferiscono al caso ideale, ovvero sono senz’altro verificate
tutte le ipotesi dette circa l’alimentazione in alternata ed il carico; in particolare la presenza
delle induttanze di alimentazione provoca lo stesso fenomeno visto per il ponte a diodi: si
osservi solo come la forma d’onda ottenuta per α=30° e µ=12°, mostrata in figura V.31, sia
molto diversa da quella mostrata in Figura V.11 a) in cui, a parità di angolo di ritardo di
accensione, l’angolo di overlap è nullo.
Vdc(t) [V] 10000
8000
6000
4000
2000
0
t [s]
0.02
Fig. V.31: Tensione ai morsetti in continua di un ponte trifase totalmente
controllato: α=30°, µ=12°
3 INVERTER TRIFASE
Lo schema utilizzato per convertire la tensione continua in una tensione alternata di frequenza
variabile (conversione continua alternata) è sempre di tipo a ponte come mostrato in figura
V.32 [3].
Cap. V – Conversione
V.30
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
Id
+
Vd
Sa+
Sb+
Sc+
A
B
Sa-
Sb-
C
Sc-
-
Fig. V.32: Schema di principio dell’ inverter trifase a ponte
In questo caso, il ponte deve essere autocommutato: gli interruttori devono essere quindi
realizzati con dispositivi elettronici di potenza totalmente pilotabili, e cioè sia in accensione
che in spegnimento.
Tra gli interruttori di potenza oggi disponibili, quelli più utilizzati sono [4]:
• GTO (Gate Turn Off thyristors);
• BJT (Bipolar Junction Transistor);
• SCR (Silicon Controlled Rectifier), detti anche tiristori, con circuiti di pilotaggio per la
commutazione forzata;
• MOSFET di potenza;
• IGBT (Insulated Gate Bipolar Transistor).
La scelta dei componenti da utilizzare dipenderà dalle frequenze di commutazione desiderate,
dalle prestazione richieste e dalle potenze in gioco, nonché dal livello di sviluppo delle
tecnologie produttive.
Il principio di funzionamento dell’inverter è molto semplice; aprendo e chiudendo gli
interruttori, ogni fase viene collegata alternativamente al ramo positivo e a quello negativo
dell’alimentazione in continua.
L’alimentazione in continua può essere caratterizzata dall’impedenza vista dal circuito di
uscita.
Si distinguono due casi limite:
a) Inverter a tensione impressa in cui la tensione Vd resta costante qualunque sia la corrente
richiesta dal carico: in questo modo accendendo e spegnendo gli interruttori, sulla coppia di
fasi in quel momento collegate si presenta la tensione Vd.
b) Inverter a corrente impressa in cui l’alimentazione si comporta da generatore ideale di
corrente, quindi la chiusura di un interruttore non fa altro che indirizzare la corrente Id,
costante, sulla fase opportuna.
Attualmente, il sistema più diffuso per piccoli valori della potenza (<1 MW) è l’inverter a
tensione impressa del quale, nel seguito, si descrive con maggior dettaglio il principio di
funzionamento. Tuttavia, si riportano anche cenni del principio di funzionamento dell’inverter
Cap. V – Conversione
V.31
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
a corrente impressa di cui si trovano ancora oggi applicazioni in impianti di elevatissima
potenza e che, comunque, costituiscono una tecnologia più consolidata.
3.1 Inverter a tensione impressa
Nel circuito mostrato precedentemente, la corrente può circolare solamente negli intervalli in
cui c’è una coppia di interruttori chiusi. Per la natura induttiva del carico e per la presenza
delle induttanze, non è possibile interrompere bruscamente la circolazione di corrente a causa
delle notevoli sovratensioni che verrebbero a presentarsi sugli interruttori. Si rendono così
necessarie alcune modifiche al circuito di figura V.32, introducendo dei diodi
contropolarizzati rispetto agli interruttori per creare un cammino alternativo alla corrente
quando gli interruttori sono aperti.
A
+
R
Vd/2
Sa+
Sb+
Sc+
L
ea
A
~
B
o
Vd/2
Sa-
C
Sb-
N
ec
Sc-
~
L
eb
~
L
R
R
-
B
C
Fig. V.33: L’inverter a tensione impressa connesso ad un carico generalizzato
A seconda della tecnica utilizzata per la sintesi dei segnali di uscita, gli inverter a tensione
impressa possono operare in modalità onde quadre (square-wave) o PWM: si veda
innanzitutto il principio di funzionamento in modalità square wave.
3.1.1 Realizzazione Square Wave (Six-Step)
Si consideri il circuito di figura V.33 in cui l’inverter è alimentato da una sorgente di tensione
ideale ed alimenta un carico generalizzato. Il principio di funzionamento è molto semplice:
Gli interruttori Sa+, Sa- sono pilotati in modo tale da condurre ciascuno per un angolo elettrico
(θ = ωt) pari a π e vengono comandati in logica complementare , cioè:
Sa+ on e Sa- off,
2 k π ≤ θ < (2 k +1)π ,
Sa+ off e Sa- on, (2 k+1) π < θ ≤ (2 k +2) π
k ∈ N0 .
Gli interruttori degli altri due rami dell’inverter sono pilotati in modo analogo ma sfasati di
120° elettrici in ritardo e in anticipo rispettivamente. In questo modo si ha che Vao è pari a
Vd/2 quando è acceso Sa+ ed a -Vd/2 quando è acceso Sa-. Lo stesso dicasi per Vbo e Vco.
Le tensioni in uscita all’inverter possono essere espresse rispetto al punto centrale
dell’alimentazione in continua:
Vab=Vao-Vbo;
Cap. V – Conversione
V.32
Van=Vao-Vno ;
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
Vbc=Vbo-Vco;
Vbn=Vbo-Vno ;
Vca=Vco-Vao;
Vcn=Vco-Vno .
Nelle ipotesi che il carico generalizzato sia simmetrico ed equilibrato, si ha che:
Van+Vbn+Vcn=0 ,
e quindi si può scrivere:
Vno=1/3 (Vao+Vbo+Vco) .
Dunque le tensioni di fase presenti sul carico generalizzato sono espresse dalle seguenti
relazioni:
Van = 2/3 Vao – 1/3 Vbo- 1/3 Vco ;
Vbn = -1/3 Vao + 2/3 Vbo- 1/3 Vco ;
Vcn = -1/3 Vao – 1/3 Vbo+ 2/3 Vco .
Nelle figure V.34 e V.35 si riportano le forme d’onda delle tensioni in uscita all’inverter,
quelle sul carico e la corrente di linea (fase A) in uscita all’inverter. Quest’ultima è
caratterizzata dall’effetto di smoothing (addolcimento) prodotto dalle induttanze di carico che
impediscono la circolazione di componenti armoniche ad alta frequenza.
V ao
a)
V d /2
0
-V d /2
0.1
0
V bo
V d /2
0
-V d /2
0
V co
0.1
V d /2
0
-V d /2
0
Cap. V – Conversione
t [s]
V.33
0.1
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
b)
V ab
Vd
0
-V d
V bc
0
0.1
0
0.1
Vd
0
-V d
V ca
Vd
0
-V d
0
0.1
t [s]
c)
V an
0
0
0.1
0
0.1
V bn
0
V cn
0
0
t [s]
0.1
Fig. V.34: Le tensioni riferite al punto centrale dell’alimentazione in continua;
(a), in uscita all’inverter (b) e quelle sul carico (c).
i
a
( t )
0
t
0
[ s ]
0 . 1
Fig. V.35: Corrente di linea (fase A) con funzionamento six-step
3.1.2 Realizzazione PWM (Pulse Width Modulation)
Il sistema PWM, ha in generale un campo di attuazione più vasto del precedente. Se si
utilizzano interruttori con frequenza di commutazione molto elevata, è possibile ottenere
correnti sinusoidali anche per bassi valori della frequenza ed inoltre il contenuto armonico
delle grandezze in uscita è meno significativo [3].
Cap. V – Conversione
V.34
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
La realizzazione di questa tecnica si basa essenzialmente sull’elettronica, quindi il costo di
realizzazione ha seguito la caduta dei prezzi dei microprocessori e dei circuiti integrati.
Con la tecnica PWM, si utilizza una frequenza di commutazione degli interruttori molto
elevata in modo da ricreare una tensione con profilo sinusoidale in uscita. Utilizzando questa
tecnica è possibile anche variare l’ampiezza della sinusoide in uscita, variando l’ampiezza
degli impulsi di comando degli interruttori, senza variare la tensione continua in ingresso
all’inverter. Per ottenere questo scopo è sufficiente generare opportunamente i treni di impulsi
di comando degli interruttori. Si possono utilizzare diverse tecniche, ma di seguito si
riportano i fondamenti teorici che stanno alla base della sola tecnica della sottooscillazione
sinusoidale mentre non verranno trattate le altre tecniche elencate.
Con la tecnica della sottooscillazione sinusoidale il treno di impulsi di comando per gli
interruttori è generato dal confronto di tre segnali sinusoidali, alla frequenza desiderata in
uscita dall’inverter e di ampiezza proporzionale a quella voluta sul carico, sfasati di 120°
l’uno dall’altro con un segnale triangolare di frequenza pari a quella di commutazione. I
segnali sinusoidali sono detti modulanti mentre il segnale triangolare è detto portante. Si
definiscono un fattore di modulazione di frequenza mf = fp/fm, dove fp è la frequenza del
segnale portante triangolare e fm la frequenza della modulante sinusoidale, ed un fattore di
modulazione di ampiezza ma = Max(V~)/Max(Vtri), dove Max(V~) è il valore massimo della
modulante sinusoidale e Max(Vtri) è il valore massimo della portante triangolare [3].
In figura 36 è riportato un esempio di applicazione della tecnica di cui sopra per generare gli
impulsi di comando degli interruttori della gamba A dell’inverter.
1
0
-1
S a+ o n
1
S a- o n
0
0
t [s]
0 .0 2
0
t [s]
0 .0 2
Fig. V.36: La tecnica di sottooscillazione sinusoidale
e gli impulsi di comando per gli interruttori della gamba A dell’inverter
In pratica, Sa+ è acceso (e Sa- è spento) quando la portante risulta maggiore della modulante e,
viceversa Sa- è acceso (Sa+ è spento) quando la portante risulta minore della modulante.
In uscita all’inverter si ottiene un segnale con una componente fondamentale alla stessa
frequenza della modulante ed un contenuto armonico confrontabile con quello della portante.
Nelle figure V.37 e V.38 si riportano le forme d’onda delle tensioni in uscita all’inverter,
quelle sul carico ottenute in analogia a quanto fatto per la figura V.35, e la corrente di linea
(fase A) in uscita all’inverter.
Cap. V – Conversione
V.35
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
a)
V ab
0
0
0.1
0
0.1
V bc
0
V ca
0
0
t [s]
0.1
b)
V an
0
0
0.1
0
0.1
V bn
0
V cn
0
0
t [s]
0.1
Fig. V.37: Le tensioni in uscita all’inverter (a) e quelle sul carico (b)
i
a
( t )
0
0
t
[ s ]
Fig. V.38: Corrente di linea (fase A) con funzionamento PWM
Cap. V – Conversione
V.36
0 . 1
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
3.2 Cenni sull’inverter a corrente impressa
Il funzionamento dell’inverter a corrente impressa, è molto semplice [1]: si considerino le
figure V.32 e V.39: modulando opportunamente l’apertura e la chiusura degli interruttori, si
reindirizza la corrente di regime, in uscita dall’alimentazione in continua (Id), sulle singole
fasi dell’uscita; più complessa è invece la modellazione [5].
2 chiuso
Id
-Id
Fig. V.39: Ciclo di chiusura degli interruttori ed andamento
della corrente nella fase A
In questo caso non sono più necessari, come visto per gli inverter a tensione impressa, i diodi
di libera circolazione dal momento che esiste sempre un cammino per la corrente. L’unica
condizione richiesta è che almeno due interruttori, uno posto sul ramo positivo ed uno sul
ramo negativo dell’inverter, devono essere chiusi per garantire un percorso alla corrente [1].
4
CONVERTITORI DOPPI CA/CC/CA
I convertitori CA/CC/CA sono utilizzati in tutte quelle applicazioni che richiedono la
variazione della frequenza di alimentazione del carico in alternata. La soluzione da adottare
dipende dal sistema utilizzato per realizzare la sezione di conversione CC/CA, poiché, oltre
alla frequenza, è spesso richiesta anche la variazione dell’ampiezza della componente
fondamentale della tensione in uscita all’inverter.
4.1 realizzazione con inverter VSI - square wave
Per ottenere la variazione dell’ampiezza della componente fondamentale della tensione in
uscita, è necessario ricorrere ad una regolazione della tensione di ingresso all’inverter [1].
La regolazione può essere effettuata agendo sul raddrizzatore (se di tipo controllato, figura
40a)) o sul circuito intermedio mediante un chopper (figura 40b)). Il chopper è essenzialmente
un convertitore continua-continua che, alimentato da una tensione di valore medio fisso, è in
grado di innalzare (step-up) o abbassare (step-down) la tensione ai suoi morsetti di uscita.
Cap. V – Conversione
V.37
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
a)
Riferimento
Circuito di controllo
α
≈
~
f
Vd
=
Vd
≈
=
raddrizzatore
inverter VSI
b)
Riferimento
Circuito di controllo
δ
f
Vd
≈
~
Chopper
=
=
Vd
≈
raddrizzatore
inverter VSI
Fig. V.40: Metodi di regolazione della tensione e della frequenza
in un inverter VSI di tipo six step: controllo a ciclo aperto
Quando le tensioni e le correnti in uscita all’inverter presentano un contenuto armonico
significativo a frequenze piuttosto vicine a quella fondamentale è necessario ricorrere al
filtraggio che incide negativamente sui costi.
4.2 realizzazione con inverter VSI - PWM
Si dimostra che nelle ipotesi che il fattore di modulazione di ampiezza, ma, sia minore di uno,
il valore della componente fondamentale della tensione sul carico, VL, è proporzionale al
valore della tensione continua in ingresso all’inverter:
VL = ma Vd/2.
Per questo motivo la sorgente in continua può essere realizzata con un semplice ponte di diodi
(non è più necessario il chopper di figura 40 b), come esemplificato dalla figura V.41.
Riferimento
Circuito di controllo
mf, ma
PWM
Vc
≈
~
Vc
=
V, f
=
≈
Fig. V.41: Metodi di regolazione della tensione e della frequenza
in un inverter VSI di tipo PWM: controllo a ciclo aperto
Cap. V – Conversione
V.38
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
Uno dei vantaggi principali del PWM è che il contenuto armonico si trova a frequenze più
elevate rispetto al caso del six-step (è legato alla frequenza di commutazione degli
interruttori). Quindi, grazie alle proprietà filtranti di un carico induttivo, il profilo della
corrente è pressoché sinusoidale e quindi il ripple di corrente è generalmente piccolo anche
grazie alle reattanze di dispersione del carico che, ad alte frequenze, assumono valori elevati.
4.3 realizzazione con inverter CSI
L’alimentazione a corrente costante è fornita all’inverter da un raddrizzatore controllato (ad
SCR), che si trasforma in un generatore di corrente inserendo una induttanza di valore
considerevole in uscita al ponte, e controllando ad anello chiuso il valore della corrente.
~
=
≈
≈
=
raddrizzatore
Id
α
Controllo
inverter CSI
Id*
+
riferim ento
Fig. V.42: Schema di principio di un azionamento
realizzato con inverter a corrente impressa
Questa soluzione è oggi impiegata praticamente solo per applicazioni di elevatissima potenza.
Cap. V – Conversione
V.39
D:\Lisa\Sis_El_Bordo\definitivi\Cap5.doc
Alfredo Testa – Appunti di Sistemi Elettrici di Bordo – a.a. 2001-2002
Bibliografia
[6] Simon M. Sze, “Dispositivi a semiconduttore”, Hoeply;
[7] Adel S. Sedra, Kenneth C. Smith, “Circuiti per la microelettronica”, Edizioni
INGEGNERIA 2000;
[1] JMD Murphy, FG Turnbull, “Power electronic control of AC motors”, Pergamon Press”;
[3] Mohan, Undeland, Robbins, ”Power electronics: converters, application and design”, John
Wiley & sons, Inc.;
[4] B. K. Bose, “Power electronics and variable frequency drives: technology and
application”, IEEE Press;
[5] R. Carbone, F. De Rosa, R. Langella, A. Testa, “A New Approach to Model AC/DC/AC
Conversion Systems”, 2001 Power Engineering Society Summer Meeting, Vancouver July,
15-19.
Cap. V – Conversione
V.40