TESINA PER L’ESAME DI
TEORIA E TECNICHE DEI NUOVI MEDIA
di Alessio Sammartino
INTRODUZIONE
L’espressione intelligenza artificiale è stata coniata da John
McCarthy, per intendere la trasposizione su calcolatore elettronico di
tutto l’insieme degli aspetti che caratterizzano l’intelletto umano.
Punto di partenza dell’intelligenza artificiale è la convinzione dei
ricercatori che qualsiasi attività cerebrale possa essere interpretata come
un calcolo; l’operazione base di questo calcolo è la deduzione.1
1
Cfr. http://www.primonet.it/rubriche/vertigo/filehtml/intell.htm
L’intelligenza artificiale mosse i primi passi dopo la seconda Guerra
Mondiale e nel ’65 già esistevano programmi in grado di risolvere problemi
di calcolo e di giocare a scacchi. Nella seconda metà degli anni Sessanta
e durante gli anni Settanta si sono delineate le varie correnti e sono
emersi i vari scopi degli studiosi interessati a questo campo. Durante un
celebre seminario, svoltosi al Dartmouth College di Hanover, i ricercatori si
schierarono su due fronti: quello i cui principali esponenti furono John
McCarthy (della Stanford University) e Marvin Minsky (del Massachusetts
Institute of Technology) e che fu definita intelligenza artificiale “hard” e
quello i cui principali esponenti furono A. Newell e H. Simon (della
Carnagie-Mellon University) e che fu definita intelligenza artificiale “soft”.
Secondo
quest’ultima
impostazione,
i
programmi
intelligenti
servono solo a verificare teorie sul modo in cui gli esseri umani potrebbero
eseguire operazioni cognitive.
Secondo l’impostazione hard, invece, l’intelligenza artificiale è un
campo di ricerca che ha come scopo quello di creare macchine pensanti in
senso pieno e non che imitino soltanto il pensiero umano.
Le tecnologie di cui stiamo parlando riguardano sia il software (i
programmi intelligenti cui abbiamo accennato), sia l’hardware con la
creazione di reti neurali somiglianti al nostro cervello e di varie periferiche
che hanno lo scopo di far riconoscere alle macchine l’ambiente esterno e
di interagire con esso come gli esseri umani.
SOFTWARE
Per quanto riguarda il software, i primi programmi degli anni
Sessanta erano tesi ad ottenere dai calcolatori delle risposte simili a quelle
che darebbe un essere umano posto dinanzi agli stessi problemi. Nei
2
decenni successivi la ricerca si è evoluta nella direzione di un’acquisizione
effettiva del comportamento (innanzitutto linguistico) umano.
Due dei partecipanti al seminario di Dartmouth, Allen Newell e
Herbert Simon ebbero un primo successo con un programma chiamato
Logic Theorist: si trattava di un “dimostratore di teoremi” nell’ambito della
logica simbolica. Il programma conteneva un insieme di assiomi, teoremi
già dimostrati e regole. Il Logic Theorist dimostrava teoremi per mezzo di
procedure che, secondo i suoi inventori, sono le stesse del cervello
umano:
1) Sostituzione di un tipo di espressione con un’altra
2) Procedimento a ritroso da qualcosa di già dimostrato a qualcosa
da dimostrare
3) Sillogismi2
I due scienziati su ricordati e Cliff Shaw della Rand Corporation
realizzarono anche un altro prodotto sorprendente: il General Problem
Solver: si trattava di un programma che doveva risolvere problemi
richiedenti intelligenza partendo da descrizioni della situazione iniziale e
del risultato desiderato. Il software possedeva un gran numero di
informazioni riguardanti le varie combinazioni di operatori a disposizione
per raggiungere il fine ed infatti questo procedimento era chiamato “analisi
mezzi-fini”. In pratica partendo dal risultato proposto, il General Problem
Solver controllava se oltre agli operatori a disposizione fossero necessari
dei prerequisiti; in caso affermativo creava tanti sotto-obiettivi finchè non
giungeva a quello che fosse più vicino alla situazione di partenza e che
non richiedesse prerequisiti.
In ogni caso si era ancora lontani dai risultati prefissi in quanto
sussistevano due ordini di problemi:
1) Enorme quantità d’informazioni che devono essere immesse
2
cfr. http://www.unive.it/%7ecired/crossing/varagno.htm
3
2) Limitato ruolo attivo svolto dal programma3
La tendenza attuale della ricerca è quella di creare dei sistemi
cosiddetti “esperti” cioè dei sistemi che contengono in sé tutte le
conoscenze riguardanti un settore specifico in modo da poter sostituire
esperti umani in materia.
Fanno parte di un sistema esperto:
1) La base di conoscenza (insieme di fatti, concetti e regole facenti
parte della specifica disciplina)
2) Il motore inferenziale (quella parte del programma in grado di
imitare l’approccio alla risoluzione del problema di un esperto)
3) La componente esplicativa (spiega all’utente il perché di una
determinata soluzione)
4) L’interfaccia utente (permette all’utente di dialogare con il
sistema attraverso un linguaggio il più possibile simile a quello
naturale)
5) Il modulo di acquisizione della conoscenza (l’oggetto che assiste
all’inserimento della conoscenza nella base di conoscenza).
In un programma convenzionale, la conoscenza è indissolubilmente
legata alle procedure con cui essa viene elaborata; la novità dei sistemi
esperti è proprio quella che essi tengono ben distinta la base di
conoscenza dalle istruzioni e sono quindi in grado di dare giustificazioni
riguardo le conclusioni raggiunte4.
I programmi di intelligenza artificiale sono scritti con appositi
linguaggi detti logici.
«Il Lisp è il linguaggio nato con il concetto di intelligenza artificiale
ed è il più usato»5; non esiste uno standard universalmente riconosciuto e
quindi si possono trovare programmi scritti in diversi “dialetti”. Fu inventato
da John McCarthy e diede subito ottimi risultati.
3
4
ivi
ivi
4
Il Prolog è l’unico linguaggio che può tenere testa al Lisp e fu creato
dal francese A. Colmeraurer nel 1972. Fu capostipite di una nuova
famiglia di linguaggi (cosiddetti logici) con cui il programmatore si limita a
descrivere il problema alla macchina, la quale lo risolve con procedimenti
di carattere deduttivo. Agli inizi degli anni Ottanta fu ufficialmente adottato
dai Giapponesi per i computer della quinta generazione.6
Per risolvere problemi “intelligenti” non bastano i due valori
convenzionali di verità-falsità (0-1) che usano i computer nelle loro funzioni
classiche; infatti nella realtà quotidiana vi sono situazioni sfumate per cui i
sistemi esperti adottano la cosiddetta “fuzzy logic” che prevede anche
un’intersezione più o meno marcata fra i due insiemi di verità e falsità.7
HARDWARE
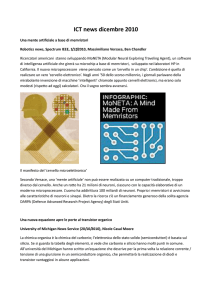
Le reti neurali sono strutture create a somiglianza del cervello
umano che, sempre più precisamente, col passare del tempo saranno in
grado di riconoscere forme complesse come il parlato, lo scritto e le forme.
Saranno in grado di farlo apprendendo autonomamente come riconoscere
queste forme complesse anziché funzionare grazie alla programmazione
5
http://www.primonet.it/rubriche/vertigo/filehtml/intell.htm
cfr. ivi
7
cfr. ivi
6
5
di una persona. Le reti neurali sono costituite da una serie di neuroni e da
connessioni che sostituiscono le nostre sinapsi.
Il fatto che siano “addestrate” e non programmate, rende le reti in
grado di lavorare anche con informazioni incomplete o, addirittura,
parzialmente errate. Il limite principale delle reti sta nel limitato numero di
neuroni, come per il cervello umano; solo che il nostro organo ne ha un
numero talmente elevato da manifestare questo limite molto tardi.
Il principio in base al quale la rete apprende è quello per cui impara
dai propri errori. I metodi di apprendimento si dividono in supervisionato e
non supervisionato. Quello principale è quello supervisionato che si
contraddistingue per la presenza di una sorta di “insegnante” che di volta
in volta comunica alla rete qual è la prestazione desiderata. Dopo
“l’insegnamento” la rete si modifica di conseguenza e dopo molte prove
(migliaia) riesce da sola a fornire la risposta giusta per un determinato
problema. Un esempio è quello della back-propagation per cui la rete
calcola ad ogni prova la differenza fra la risposta data e quella stabilita
dall’insegnamento; a seconda dell’entità dell’errore modificherà la risposta
successiva.
Con il metodo non supervisionato, invece, la rete neurale impara
scoprendo regolarità negli stimoli senza che le venga spiegato dall’esterno
quali siano queste regolarità.8
La rete non dà risultati completamente giusti o sbagliati ma
risponde secondo la fuzzy logic; quindi se gli viene fornito uno stimolo
simile ad un altro per il quale ha già imparato la risposta, darà un output
uguale o simile a quello per lo stimolo già conosciuto. Questa capacità è
uno dei vantaggi più importanti rispetto ai sistemi tradizionali.
Le principali reti neurali utilizzate oggi sono la Multilayer Perceptron
con back propagation come metodo di apprendimento, le Reti di Hopfield
e le Reti di Kohonen.
I neuroni del primo tipo sono organizzati a strati: uno di input, uno di
output, ed altri strati intermedi. Lo strato di input trasmette gli impulsi allo
strato successivo e ad ogni passaggio avvengono delle modifiche delle
8
cfr. http://www.logikos.it/teorema/reti.htm
6
informazioni fino ad arrivare allo strato di output. Problemi diversi vengono
risolti da reti diverse: maggiore è la complessità e maggiore è il numero
dei neuroni necessari.
Le reti di Hopfield non sono suddivise in strati e tutti i neuroni sono
collegati fra di loro (reti fully-connected).
“La funzione principale delle Reti di Hopfield è quella di riconoscere
pattern molto rumorosi come pattern che sono stati "immagazzinati nella
sua memoria" cioè già classificati: ad un pattern rumoroso viene associato
in
output
un
pattern
perfetto”9.
Gli
input
vengono
mostrati
contemporaneamente a tutti i neuroni ed il valore di ognuno di essi
influenza quello di tutti gli altri. Una volta immessi gli input inizia la fase di
apprendimento, durante la quale la rete cerca di raggiungere compromessi
fra i valori di neuroni fino a quando questi non variano più ed allora si sarà
raggiunto il miglior compromesso che sarà anche l’output della rete.
Le reti di Kohonen nascono dallo studio della corteccia cerebrale
umana e permettono di classificare oggetti senza bisogno di supervisione
esterna e tengono conto sia delle connessioni sinottiche fra neuroni che
dell’influenza che ogni neurone ha sul vicino. Esse sono costituite da una
serie di neuroni che servono solo a recepire l’output e da un singolo strato
bidimensionale in cui i neuroni sono posti come su una griglia su di un
piano e questi neuroni calcolano l’output. Ogni neurone di input è
collegato a tutti i neuroni della griglia.10
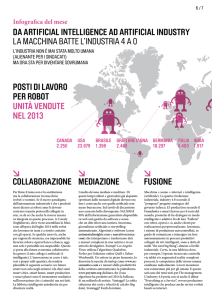
Un altro ramo di sviluppo dell’hardware che riguarda l’intelligenza
artificiale è quello della
Robotica.
A differenza dei sistemi esperti e delle reti neurali che cercano di
riprodurre il pensiero razionale dell’uomo, la robotica pone come proprio
obbiettivo quello di riprodurre la capacità dell’uomo di riconoscere
l’ambiente che lo circonda e di agire al suo interno con disinvoltura.
9
ivi
10
ivi
7
Gli esseri umani danno per scontato che il riconoscimento di oggetti
ed il movimento in base alle informazioni provenienti dal mondo esterno
siano operazioni banali, ma questo dipende soltanto dal fatto che millenni
di evoluzione necessaria alla sopravvivenza della nostra specie ci hanno
resi molto capaci. I computer più potenti, che compiono milioni di
operazioni al secondo possono risolvere problemi e fare calcoli a velocità
per noi incredibili ma uno di questi computer non sarebbe in grado di rifare
un letto!11 Per chiarirsi le idee basti confrontare i processi visivi dell’occhio
umano con quelli sviluppati per consentire a robot industriali di “vedere”: ai
robot occorrerebbe la capacità del supercomputer più potente del mondo
(un miliardo di calcoli al secondo) per ottenere gli stessi risultati alla stessa
velocità della retina umana.12
Oltre a lavorare per dare ai robot capacità sensoriali rivolte verso
l’esterno, alcuni scienziati stanno cercando di creare computer in grado di
riconoscere le emozioni umane. Grazie ad alcuni sensori collegati agli
umani, questi computer saranno in grado di comprendere le emozioni
causate dal loro operare e reagire di conseguenza, modificando le loro
azioni se riceveranno input di non gradimento o viceversa. Si sta
lavorando a computer “indossabili”, che stando sempre a contatto con una
persona, imparano a conoscerla ed a stabilire un feed-back. Allo stato
attuale esistono già dei prototipi funzionanti di occhiali che riconoscono
delle emozioni dai movimenti dei muscoli facciali.13
Forse l’approccio più promettente alla robotica è quello che parte
“dal basso”: si cerca di imitare i sistemi nervosi degli animali partendo da
quelli più elementari per creare poi sistemi via via più complessi. In questo
modo i progressi dovrebbero essere più veloci ed infatti i migliori robot di
oggi sono controllati da computer che simulano il sistema nervoso di un
insetto.14
11
vedi http://www.primonet.it/rubriche/vertigo/filehtml/intell.htm
vedi HANS MORAVEC, il robot universale in L. CAPUCCI (a cura di), Il corpo tecnologico, Baskerville,
Bologna, 1994 pagg. 99-112
13
vedi http://www.mediamente.rai.it/home/bibliote/intervis/p/picard.htm
14
vedi HANS MORAVEC, il robot universale in L. CAPUCCI (a cura di), Il corpo tecnologico, Baskerville,
Bologna, 1994 pagg. 99-112
12
8
Ci sono scienziati (come H. Moravec) che fanno previsioni su come
ed in quali tempi questo tipo di approccio si evolverà: a partire dal 2010
circa, ci dovrebbero essere i primi robot universali con movimenti limitati e
controllati da rigidi programmi, ma in grado di interagire con l’uomo e
l’ambiente fisico in cui si muoveranno. Passando per stadi intermedi,
queste macchine acquisiranno sempre più capacità e saranno coniugate a
programmi di intelligenza artificiale simili a quelli descritti sopra ma più
complessi e che gireranno su computer molto più veloci. Questa unione li
renderà molto simili agli esseri umani e col passare dei decenni le loro
capacità saranno di gran lunga superiori a quelle degli uomini fino a
diventare esseri decisamente sovrumani che noi non riusciremo più
neanche a comprendere.15
PROBLEMATICHE
Lo sviluppo dell’intelligenza artificiale può portare all’instaurarsi di
vari scenari futuri, ad un mondo che adesso è difficile immaginare.
Quello che ha portato l’uomo verso questo tipo di studi è
l’evoluzione del bisogno di risparmiarsi il sovrappiù di fatiche derivanti
dalle società complesse. Si è iniziato con l’addomesticare gli animali e si è
continuato con la creazione di macchine mano a mano più sofisticate che
potessero svolgere i compiti più sgraditi.
Cosa succederà quando finalmente avremo creato la macchina
perfetta in grado di svolgere come noi e meglio di noi questi compiti?
E quando questa macchina potrà fare qualunque cosa meglio di noi
e fare cose che noi neppure sogniamo?
15
ivi
9
Moravec16 suggerisce di non considerare i futuri robot come
qualcosa di totalmente esterno a noi ma come dei nostri “figli”, o
perlomeno “figli delle nostre menti”. Egli è certo che questi nostri
discendenti saranno nettamente superiori a noi e faranno fatica a
comunicare al nostro livello elementare. Però, aggiunge, noi non saremmo
tagliati fuori, in quanto vi sarà la possibilità di trasporre la nostra essenza
in un corpo meccanico immortale e con capacità fisiche e di pensiero
migliaia o forse milioni di volte superiori.
Marvin Minsky, del M.I.T, abbracciando in più parti la visione di
Moravec, si chiede perché noi dovremmo rassegnarci a convivere con i
difetti e la scarsa durata del nostro corpo biologico.17Quando sarà
possibile sostituirlo con uno meccanico potremmo decidere se essere
immortali, quanti, quali e che tipo di figli avere. Si potrà programmare
quante persone dovranno popolare la terra e quali specie e culture sarà
meglio che lo facciano.18
Eppure alle fredde riflessioni di Minsky forse bisognerebbe opporre
qualche quesito anche se, probabilmente, per ora non vi possono essere
risposte.
Innanzitutto se noi creassimo degli esseri del tutto simili a noi e
quindi, in pratica, delle persone, per svolgere i nostri lavori, metteremmo in
atto una forma di schiavismo. Questo problema può essere aggirato con
l’argomentazione per cui anche noi aderiremo alle capacità dei nostri
discendenti meccanici,
non ci saranno differenze e forse non ci sarà
neanche bisogno di svolgere determinati lavori, o perlomeno questi non
costeranno fatica a nessuno. Però non vedo perché si debba escludere
che i nostri potenziali “figli” possano non essere poi tanto benevoli nei
nostri confronti e comportarsi come ogni specie superiore ha fatto
dovendo condividere lo stesso spazio di una inferiore, cioè distruggendo
quest’ultima. Non saremmo forse degli esseri inutili?
16
ivi
M. MINSKY, Saranno i robot a ereditare la Terra? In «Le Scienze» n. 316, dicembre 1994, pag.97
18
ivi
17
10
Inoltre chi e su quale base dovrebbe decidere chi popolerà il
mondo? Oppure tutti saranno in grado di creare esseri a loro piacimento
generando così invece che una dittatura solo il caos?
Sono
d’accordo
che
forse
non
si
possa
rispondere
ad
argomentazioni scientifiche con temi quali l’anima od altre entità non
definite che fanno parte dell’essere umano. Tuttavia scienziati come
Minsky dovrebbero almeno spiegarci perché dovremmo rinunciare ad una
serie di piaceri ed emozioni che solo la natura biologica dell’uomo ci
permette di provare, quali l’attrazione fisica, la gioia di procreare etc,,,,,
Oppure si sostiene che progettare un figlio possa dare le stesse
sensazioni (ammesso che il corpo meccanico ci permetta di averne) di
generarne uno?
Non voglio di certo insinuare che bisognerebbe frenare il progresso,
soprattutto quando questo può migliorare la qualità della vita.So che gli
scienziati di tutto il mondo si pongono problemi etici di questo tipo ma non
posso fare a meno di provare una certa ansia quando leggo articoli come
quello di Minsky19 in cui aleggia un quasi disprezzo per ciò che siamo.
19
ivi
11
FONTI
Cartacee:
-P. L. CAPUCCI (a cura di), Il corpo tecnologico, Baskerville,
Bologna 1994
- M. MINSKY, Saranno i robot a ereditare la terra?, in «Le scienze»
(edizione italiana di «Scientific American») n. 316, dicembre 1994,
pp. 97-102
Telematiche
http://www.primonet.it/rubriche/vertigo/filehtml/intell.html
http://www.unive.it/%7ecired/crossing/varagno.htm
http://www.mediamente.rai.it/home/bibliote/intervis/c/cordesch.
htm
http://www.comune.modena.it/scuole/smscarlo/ferri.htm
http://www.unipa.it/%7egui-pa/int_artificiale/int_artificiale.htm
http://www.criad.unibo.it/%7egalarico/calcolo/artifici.htm
http://www.mediamente.rai.it/home/bibliote/intervis/f/faggin2.ht
m
http://www.mediamente.rai.it/home/bibliote/intervis/p/picard.ht
m
http://paradiso.itd.ge.cnr.it/td/td1/nascita2fr.htm
http://www.logikos.it/teorema/modevo.htm
http://www.logikos.it/teorema/reti.htm
12
.
13
14