Linee di Trasmissione
Si consideri un tratto di linea di lunghezza infinitesima dz caratterizzato dai quattro parametri primari:
R,L,G,C
detti rispettivamente resistenza e induttanza (serie), conduttanza e capacità (parallelo) per unità di lunghezza della
linea. Un tale tratto è rappresentabile con
I(z)
Rdz
Ldz
I(z+dz)
+
+
Cdz
V(z)
Gdz
-
V(z+dz)
-
Essendo il tratto di linea di lunghezza infinitesima, possiamo approssimare al primo ordine ottenendo:
I ( z + dz ) ≅ I ( z ) + dI ( z )
V ( z + dz ) ≅ V ( z ) + dV ( z )
Applicando le leggi di Kirchhoff alla rete in figura e supponendo di essere in regime armonico, si ottiene:
V ( z ) + dV ( z ) = V ( z ) − ( R + jω ⋅ L ) ⋅ dz ⋅ I ( z )
I ( z ) + dI ( z ) = I ( z ) − ( G + jω ⋅ C ) ⋅ dz ⋅ V ( z )
avendo definito
dV ( z )
= −( R + jω ⋅ L ) ⋅ I ( z ) = − Z ⋅ I ( z )
dz
dI ( z )
= −( G + jω ⋅ C ) ⋅ V ( z ) = −Y ⋅ V ( z )
dz
Z = ( R + jω ⋅ L )
Impedenza (serie) per unità di lunghezza della linea
Y = ( G + jω ⋅ C )
Ammettenza (parallelo) per unità di lunghezza della linea
Il sistema di equazioni precedente può essere posto nella forma (detta Equazione dei Telegrafisti):
d 2V ( z )
= Z ⋅ Y ⋅V ( z ) = γ 2 ⋅V ( z )
2
dz
d 2 I( z )
= Z ⋅Y ⋅ I( z ) = γ 2 ⋅ I( z )
2
dz
avendo definito la Costante di Propagazione della linea γ :
γ 2 ≡ Z ⋅ Y = ( R + jω ⋅ L ) ⋅ ( G + j ω ⋅ C ) = ( α + j β ) 2
Si ottengono le due soluzioni per V(z) e I(z) nella forma:
V ( z ) = V + ⋅ e −γ ⋅ z + V − ⋅ e γ ⋅ z
I ( z ) = I + ⋅ e −γ ⋅ z + I − ⋅ e γ ⋅ z
Le costanti di integrazione (V+, V- ) e (I+, I- ) non sono tra loro indipendenti; infatti :
I( z ) = −
da cui le soluzioni :
1 dV ( z )
1
⋅
= − ⋅ ( −γ ⋅ V + ⋅ e −γ ⋅ z + γ ⋅ V − ⋅ eγ ⋅ z )
Z
dz
Z
V ( z ) = V + ⋅ e −γ ⋅ z + V − ⋅ e γ ⋅ z
I( z ) =
γ
Z
⋅ ( V + ⋅ e −γ ⋅ z − V − ⋅ e γ ⋅ z )
Se si definisce l’Impedenza Caratteristica della linea, ZC come :
ZC ≡
1
Z
≡ =
YC γ
Z
=
Y
R + jω ⋅ L
G + jω ⋅ C
si ottiene, per la corrente lungo la linea, l’espressione:
I ( z ) = YC ⋅ ( V + ⋅ e −γ ⋅z − V − ⋅ e γ ⋅z )
Le due grandezze γ (Costante di Propagazione) e ZC (Impedenza Caratteristica) vengono denominate Costanti
Secondarie della linea. Possiamo così caratterizzare una linea di trasmissione in base alle sue costanti primarie o alle sue
costanti secondarie: in ogni caso una coppia di grandezze complesse.
La soluzione, nel tempo ed in regime armonico, può essere posta nella forma:
{
= Re{V
}
{[
]
} {[
)
}= V ⋅ e
]
}
V ( z ,t ) = Re V ( z ) ⋅ e jω ⋅t = Re V + ⋅ e −γ ⋅ z + V − ⋅ eγ ⋅ z ⋅ e jω ⋅t = Re V + ⋅ e − (α + jβ )⋅ z + V − ⋅ e (α + jβ )⋅ z ⋅ e jω ⋅t =
+
}
{
⋅ e −α ⋅ z ⋅ e j (ω ⋅t − β ⋅ z ) + Re V − ⋅ eα ⋅ z ⋅ e j (ω ⋅t + β ⋅ z
+
−α ⋅ z
(
)
(
⋅ cos ω ⋅ t − β ⋅ z + ϕV + + V − ⋅ eα ⋅ z ⋅ cos ω ⋅ t + β ⋅ z + ϕV −
)
Le due parti della soluzione possono essere interpretate rispettivamente come onde di tensione viaggianti nella direzione
+z e -z : infatti, per tenere la fase costante col passare del tempo, si deve viaggiare in un caso nella direzione delle z
positive, nell’altro delle z negative. Il Fattore di Attenuazione di entrambe è α (misurato in Neper/m o in dB/m).
Considerando la sola parte progressiva (V+), la distanza che si deve percorrere per riottenere la stessa fase (per t fissato),
cioè in un periodo spaziale, è definita come Lunghezza d’onda λ:
β ⋅ (z 2 − z1 ) = 2π = β ⋅ λ ⇒ λ =
2π
β
La Velocità di Fase, vph, ovvero la velocità alla quale si muove una superfice equifase, è data da:
ω
dϕ
dz
=ω −β ⋅
= ω − β ⋅ v ph = 0 ⇒ v ph =
β
dt
dt
V+
z
V-
z
Particolarizzando la soluzione ottenuta al caso senza perdite, si ottiene:
R=G =0
⇒
⎧
L
ZC =
⎪
∈ℜ
⎨
C
⎪γ = jω ⋅ L ⋅ C ∈ ℑ ⇒ α = 0 , β = ω ⋅ L ⋅ C
⎩
Nel caso di strutture omogenee e senza perdite, con propagazione di tipo TEM (Transverse Electro-Magnetic), è possibile
dimostrare (direttamente dalle equazioni di Maxwell) che si ha sempre:
γ = j ⋅ β = jω ⋅ µ ⋅ ε
e quindi una velocità di fase costante e coincidente con la velocità di propagazione delle onde elettromagnetiche nel
mezzo considerato:
v ph =
1
1
ω
=
=
= c = cos tan te
β
L ⋅C
µ ⋅ε
Quindi, se si vogliono variare le caratteristiche propagative di una linea, non se ne può variare liberamente la geometria:
infatti, ciò varierebbe una delle due grandezze primarie (L o C) ma la rimanente varierebbe in modo inverso,
mantenendo costante il prodotto. Si deve quindi variare separatamente L o C, aggiungendo ad esempio elementi
concentrati opportunamente distanziati (pupinizzazione).
Coefficiente di riflessione
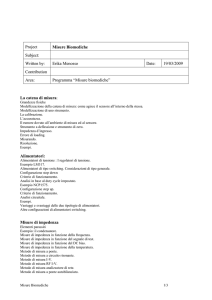
Supponiamo di considerare una linea di trasmissione di lunghezza finita l e di terminarla su un carico di impedenza ZL:
ZC, γ
Zin
ZL
-l
0
z
Il nostro scopo è determinare il valore dell’impedenza di ingresso Zin. Tensione e corrente sulla linea sono date da:
V ( z ) = V + ⋅ e −γ ⋅ z + V − ⋅ e γ ⋅ z
I ( z ) = YC ⋅ ( V + ⋅ e −γ ⋅ z − V − ⋅ eγ ⋅ z )
Con la scelta di coordinate effettuata, il carico impone che sia:
V (0 ) V + + V −
Z (0 ) =
=
⋅ ZC ≡ Z L
I (0 ) V + − V −
Definendo il Coefficiente di Riflessione del Carico, Γ(0), il rapporto tra onda riflessa e incidente di tensione sul carico :
Γ (0 ) =
−
V
V+
ZL
ZC
Ẑ − 1
= L
,
=−
ZL
Ẑ
+
1
L
1+
ZC
1−
Ẑ L ≡
ZL
= impedenza normalizzata
ZC
All’ingresso della linea di trasmissione si avrà:
Z (− l ) =
V (− l )
V ⋅e +V ⋅e
= Z C ⋅ + γ ⋅l
= ZC ⋅
I (− l )
V ⋅ e − V − ⋅ e − γ ⋅l
= ZC ⋅
+
γ ⋅l
−
−γ ⋅l
V − −γ ⋅l
⋅e
1 + Ẑ L ⋅ e γ ⋅l − 1 − Ẑ L ⋅ e −γ ⋅l
eγ ⋅l − e −γ ⋅l + Ẑ L ⋅ e γ ⋅l + e −γ ⋅l
V+
Z
Z
=
⋅
=
⋅
=
C
C
V − −γ ⋅l
1 + Ẑ L ⋅ eγ ⋅l + 1 − Ẑ L ⋅ e −γ ⋅l
eγ ⋅l + e −γ ⋅l + Ẑ L ⋅ e γ ⋅l − e −γ ⋅l
− + ⋅e
V
(
(
e γ ⋅l +
eγ ⋅l
sinh(γ ⋅ l ) + Ẑ L ⋅ cosh(γ ⋅ l )
)
)
(
(
)
)
(
(
)
)
(
(
)
)
cosh(γ ⋅ l ) + Ẑ L ⋅ sinh(γ ⋅ l )
Se si suppone che la linea sia senza perdite, ossia γ = jβ :
Z in = Z (− l ) = Z C ⋅
(e
(e
jβ ⋅l
jβ ⋅l
) (
)+ Ẑ ⋅ (e
− e − jβ ⋅l + Ẑ L ⋅ e jβ ⋅l + e − jβ ⋅l
+e
− jβ ⋅l
L
jβ ⋅l
−e
− jβ ⋅l
)=Z
)
C
⋅
j ⋅ sin(β ⋅ l ) + Ẑ L ⋅ cos(β ⋅ l )
cos(β ⋅ l ) + j ⋅ Ẑ L ⋅ sin(β ⋅ l )
= ZC ⋅
Ossia:
Z in = Z C ⋅
Z L + j ⋅ Z C ⋅ tan(β ⋅ l )
Z C + j ⋅ Z L ⋅ tan(β ⋅ l )
Consideriamo ora dei casi notevoli per l’espressione precedente
Ẑ L + j ⋅ tan(β ⋅ l )
1 + j ⋅ Ẑ L ⋅ tan(β ⋅ l )
= ZC ⋅
Z L + j ⋅ Z C ⋅ tan(β ⋅ l )
Z C + j ⋅ Z L ⋅ tan(β ⋅ l )
A - Se la lunghezza del tratto di linea è pari ad un multiplo di λ/2, ossia se si ha:
l = 0,
λ
2
, λ ,… , k ⋅
λ
2
k ∈ℑ
Z in = Z L
Quindi, aggiungendo un tratto di linea di lunghezza multipla di λ/2, se la linea è senza perdite, non si cambia
l’impedenza di ingresso. Ovviamente, visto che la lunghezza d’onda è funzione della frequenza, questo è valido ad una
frequenza singola.
B - Se la lunghezza del tratto di linea è un multiplo dispari di λ/4, ossia se:
λ 3
5
2 ⋅ k +1
l = , ⋅ λ , ⋅ λ ,…,
⋅λ
4 4
4
4
k ∈ℑ
Z C2
Z in =
ZL
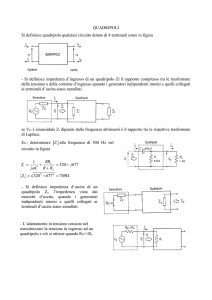
C - Se il carico è un cortocircuito (ZL = 0):
ossia
Ẑ in =
1
Ẑ L
X
Z in = j ⋅ Z C ⋅ tan(β ⋅ l )
λ/4
L’impedenza di ingresso è dunque puramente reattiva
ed ha l’andamento della tangente:
3λ/4
λ/2
Il medesimo comportamento si ottiene se l’impedenza di carico è un circuito aperto (ZL =∞ ), caso nel quale si ha:
Z in = − j ⋅ Z C ⋅ cot an(β ⋅ l )
λ
l
D - Se l’impedenza di carico è pari all’impedenza caratteristica della linea, ossia se:
Z in ≡ Z C
Z L = ZC
∀l
In tale caso la linea è detta “adattata” sulla sua impedenza caratteristica. Non esiste in questo caso un’onda riflessa:
Γ (0 ) =
V−
1−1
=−
=0
1+ 1
V+
V− =0
⇒
E’ possibile definire un Coefficiente di Riflessione lungo la linea Γ(z) come il rapporto tra onda di tensione riflessa e
diretta alla sezione z :
V − ⋅ e jβ ⋅ z
Γ (z ) = + − jβ ⋅ z = Γ (0 ) ⋅ e 2 jβ ⋅ z
V ⋅e
Si noti che nel caso senza perdite cui si riferisce l’espressione sopra, il modulo del coefficiente di riflessione è costante
lungo la linea (dipende soltanto da quello del carico) mentre la fase varia. In generale rimane valida la coppia di
relazioni:
Γ (z ) =
Z (z ) − Z C
Z (z ) + Z C
Z (z ) = Z C ⋅
⇔
1 + Γ (z )
1 − Γ (z )
Cerchiamo ora di determinare la potenza assorbita e quella riflessa dal carico. Queste ultime possono essere espresse in
funzione della potenza incidente e del coefficiente di riflessione del carico (si suppone ZC reale):
{
}
⎧⎪ + V +*
1
1
1
*
+
+*
Pinc = ⋅ Re Vinc ⋅ I inc = ⋅ Re V ⋅ I = ⋅ Re⎨V ⋅ *
2
2
2
ZC
⎪⎩
{
Prefl =
{
}
}
{
}
V
−
2
*
1
1
*
⋅ Re Vrefl ⋅ I refl
= ⋅ Re V − ⋅ I − =
=
2
2
2 ⋅ ZC
V
+
2
2
⎫⎪ V +
⎬=
⎪⎭ 2 ⋅ Z C
⋅ ΓL
2 ⋅ ZC
(
Pabs = Pinc − Prefl = 1 − Γ L
2
= Pinc ⋅ Γ L
2
2
)⋅ P
inc
La Perdita di Ritorno (Return Loss) è definita come il rapporto (di solito espresso in decibel) tra potenza incidente e
riflessa:
⎛P ⎞
RLdB = 10 ⋅ log ⎜ inc ⎟ = −20 ⋅ log Γ L > 0
⎜ Prefl ⎟
⎝
⎠
Per una linea terminata con un carico ZL non adattato (cioè di valore diverso da ZC), esistono quindi onde riflesse che
interferiscono con quelle incidenti a formare una configurazione di onde stazionarie lungo la linea. Infatti, se si considera
la tensione lungo la linea si ha:
(
V ( z ) = V + ⋅ e − jβ ⋅ z + V − ⋅ e jβ ⋅ z = V + ⋅ e − jβ ⋅ z ⋅ 1 + Γ L ⋅ e 2 jβ ⋅ z
Se si considera
)
Γ L = Γ L ⋅ e jϕ e si calcola il modulo della tensione, si ottiene:
{[
]
}
V (z ) = V + ⋅ 1 + Γ L ⋅ e j (2 β ⋅ z +ϕ ) = V + ⋅ 1 + Γ L ⋅ cos(2 β ⋅ z + ϕ ) + j Γ L ⋅ sin(2 β ⋅ z + ϕ ) = V + ⋅ 1 + Γ L ⋅ cos(2 β ⋅ z + ϕ ) + Γ L ⋅ sin 2 (2 β ⋅ z + ϕ )
{
}
= V + ⋅ 1 + Γ L + 2 ⋅ Γ L ⋅ cos(2 β ⋅ z + ϕ )
2
12
⎧
= V + ⋅ ⎨(1 + Γ L
⎩
)
2
2
ϕ ⎞⎫
⎛
− 4 ⋅ Γ L ⋅ sin 2 ⎜ β ⋅ z + ⎟⎬
2 ⎠⎭
⎝
2
12
=
12
Quindi |V(z)| è una funzione periodica che oscilla tra un valore massimo (quando βz+ϕ/2=nπ) ed un valore minimo
(quando βz+ϕ/2 = m π - π /2):
V
max
= V + ⋅ (1 + Γ L
β ⋅z =π
Tale funzione si ripete con periodicità
)
⇒
V
min
= V + ⋅ (1 − Γ L
)
λ
2
Il Rapporto di Onda Stazionaria in Tensione (ROS o Voltage Standing Wave Ratio, VSWR), è definito come il
rapporto tra tensione massima e minima sulla linea:
VSWR ≡
V
V
max
min
=
1 + ΓL
1 − ΓL
ΓL =
VSWR − 1
VSWR + 1
Carta di Smith
Le relazioni trovate consentono di trasformare il piano complesso della variabile Z=R+jX in quello della variabile Γ =
Γr+jΓi e viceversa. Determiniamo, in particolare, le caratteristiche della prima trasformazione da Z a Γ; consideriamo i
luoghi dei punti (rette) a resistenza costante e vediamo come vengono trasformati nel piano della variabile Γ. Si ottiene:
R = R = cos t
Γ = Γ r + jΓ i =
R + jX − Z C
R + jX + Z C
Supponendo, senza perdita di generalità, ZC puramente reale e normalizzando le impedenze a tale ZC si ottiene:
Γ r + jΓ i =
R̂ − 1 + jX̂
R̂ 2 − 1 + X̂ 2
2 ⋅ X̂
=
+j
2
2
2
R̂ + 1 + jX̂
R̂ + 1 + X̂
R̂ + 1 + X̂ 2
(
)
(
)
Γr =
ossia:
R̂ 2 − 1 + X̂ 2
(R̂ + 1) + X̂
2
2
Γi =
2 ⋅ X̂
(R̂ + 1) + X̂
2
2
Se dalle equazioni precedenti si elimina il parametro X, si ottiene la famiglia di cerchi, con parametro R, descritti
dall’equazione seguente:
Γ r2 + Γ i 2 −
2 ⋅ R̂
1 − R̂
⋅ Γr =
1 + R̂
1 + R̂
Γ
Z
Γi
X
1
R=1
R=0
Γr
R=2
R
-1
1
-1
Si noti che il semipiano R > 0, corrispondente ai carichi passivi, viene trasformato nel cerchio di circonferenza | Γ| = 1
centrato nell’origine (cerchio unitario) del piano Γ. Ciò è naturale, visto che per carichi passivi l’onda riflessa deve
essere sempre minore in modulo di quella incidente. Per R∈(-1,0) i cerchi corrispondenti contengono il cerchio unitario,
rimanendo tra loro tangenti nel punto (1,0). Per R = -1 l’equazione della circonferenza degenera nella retta Γr = 1. Infine,
per R < -1 le circonferenze, sempre tangenti nel punto (1,0), hanno centro nel semipiano Γr > 1.
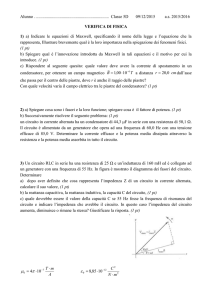
Se si considerano ora nel piano Z i luoghi (rette) caratterizzati da:
X = X = cos t
nel piano Γ, eliminando la variabile R come nel caso precedente, si ottiene la famiglia di circonferenze con parametro X
descritta dall’equazione:
Γ r2 + Γ i 2 − 2 ⋅ Γ r −
2 ⋅ Γi
X̂
= −1
Tali circonferenze, con centro sulla retta Γr = 1, sono tra loro tangenti nel punto (1,0) e giacciono nel semipiano Γi > 0
per X > 0 (impedenze induttive) o nel semipiano Γi < 0 per X < 0 (impedenze capacitive); per X = 0 la circonferenza
degenera nell’asse Γi = 0:
Z
Γi
X
Γ
1
X=2
X=1
Γr
X=0
1
R
-1
X = -2
X =- 1
Γi
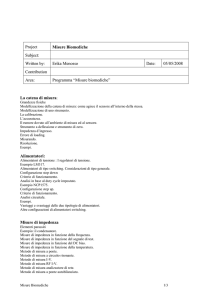
La trattazione precedentemente effettuata sulle trasformazioni
dal piano Z al piano Γ è alla base di uno degli strumenti
maggiormente utilizzati per lo studio di circuiti a costanti
distribuite: la Carta (o Abaco) di Smith. Tale carta non è altro
che il cerchio unitario del piano e rappresenta quindi tutte le
impedenze a parte reale positiva, corrispondenti a carichi
passivi. Nella carta sono indicati i luoghi di punti (tratti di
circonferenze) a valore di resistenza o reattanza costante, così
come derivabili dai calcoli precedentemente effettuati.
A
C
B
Γr
Dalla figura è possibile riconoscere alcuni punti notevoli: il punto (-1,0) (indicato con A) corrisponde al cortocircuito, il
punto (0,0) all’impedenza di normalizzazione (ZC, punto B), mentre il punto C in figura (1,0) corrisponde al circuito
aperto. E’ da tenere presente che l’impedenza di normalizzazione, in applicazioni a frequenze superiori al centinaio di
MHz, viene di solito scelta pari a 50 Ω (puramente reale). La relazione che consente di passare dal piano della variabile
impedenza a quello della variabile coefficiente di riflessione, può anche essere scritta in termini di ammettenza:
1
1
−
Z (z ) − Z C Y (z ) YC YC − Y (z )
Γ (z ) =
=
=
1
1
Z (z ) + Z C
YC + Y (z )
+
Y (z ) YC
Si può facilmente notare che la dipendenza funzionale è
pressochè identica, ad eccezione che per il segno del
numeratore. Per ottenere quindi la Carta di Smith relativa alle
ammettenze, basterà effettuare una trasformazione di simmetria
rispetto all’origine della carta relativa alle impedenze. In tale
carta, le ammettenze di tipo capacitivo (con parte immaginaria,
o suscettanza positiva) occupano il semipiano Γi < 0 mentre
quelle di tipo induttivo (con suscettanza negativa) occupano il
semipiano Γi > 0.
Γi
A
B
C
Γr
Le due carte (delle impedenze e delle ammettenze) vengono
talvolta utilizzate insieme, sovrapponendole come in figura.
Dalla definizione di Coefficiente di riflessione lungo la linea:
V − ⋅ e jβ ⋅ z
Γ (z ) = + − jβ ⋅ z = Γ (0 ) ⋅ e 2 jβ ⋅ z = Γ L ⋅ e 2 jβ ⋅ z
V ⋅e
Se il sistema di riferimento viene cambiato invertendo il verso dell’asse z, ossia considerando lunghezze positive se ci si
allontana dal carico, si ottiene:
Γ (z ) = Γ L ⋅ e −2 jβ ⋅ z
Se, per maggiore generalità, si considera il caso con perdite, l’espressione precedente diventa:
Γ (z ) = Γ L ⋅ e −2α ⋅ z ⋅ e −2 jβ ⋅ z
Quindi, se si aggiunge una linea (di impedenza caratteristica pari a quella di normalizzazione) in serie ad un carico di
coefficiente di riflessione ΓL , il coefficiente di riflessione risultante avrà un modulo ridotto del fattore di attenuazione ed
una fase che ruota in senso orario nel piano Γ. Nel caso senza perdite, questo corrisponde ad una rotazione in senso
orario lungo una circonferenza di modulo ΓL, centrata nell’origine (ZC). Si noti che la lunghezza elettrica della linea che
consente di effettuare una circonferenza completa vale π, e quindi una lunghezza fisica di λ/2. Per facilitare
l’individuazione delle rotazioni di fase conseguenti all’introduzione di una linea, spesso sulla carta di Smith viene
aggiunta una scala graduata esterna, normalizzata in frazioni di lunghezza d’onda.
0.12
0.13
0.38
0.37
0.36
0.14
0.35
-100
-90
1.4
1.2
1
0.
1.6
0.7
0.8
0.9
4
0.3
16
0.
0.15
0.8
-80
0.9
1
0.39
0.11
0.40
0.1
0
0.4
1
0.0
9
0.
42
0.
08
0
33
0. 7
1
0.
6
0.
0.7
1.2
1.4
-11
0
-1
2
0
-6
6
8
1.
18
0.
5
0.
1.
6
-70
0.
0. 43
07
0.2
1.
8
32
44
0.
2
0.
5
40
-1
0.4
0.
06
0.
31
2
-1
30
45
0.
05
0.
0.6
3
3
-1
50
4
0.
8
4
1
0
50
20
10
5
4
3
2
1.8
1.6
1.4
1.2
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
160
0.
8
0.1
0.1
0.4
10
10
0
0.
04
0.
46
1
15
0
0.
3
1
5
5
+B p
46
0. 4
0
0.
0.26
0.
29
0.
21
0.
3
0.2
8
0.2
2
0.
30
0.
20
-4
0
0.
4
0.2
50
0.25
0.27
0.2
3
-20
8
0.
0.24
6
0.
0.25
0.4
-10
20
0.01
LOAD
20
0.24
0.26
0.48
0.23
0.27
10
7
0.02
0.4
RD
TOWA
3
S
0.0
GHT
N
E
EL
V
A
W
0
-16
0.2
5
-B p
20
0.2
+X
1
2
0.2
8
0.2
-30
3
21
0.
29
0.
0.
6
s
WAVELE
NGHTS
0.01
TO
0.02 WARD
0.49
GEN
0.4
0. ERATO
8
03
R
0.4
7
0.8
30
0.1
0.2
20
3
14
0
0.
05
0.
45
0.
4
40
0.6
0.
0 . 06
44
31
0.
3
20
0. 0
3
0.
0.4
19
0
2
5
0.
50
0.
0.2
0.3
0.49
1.
6
6
0.
1.
8
0.
5
0.4
-Xs
60
0.
0.2
0
-5
1.4
1.2
1
0.9
0.8
0.7
0.
16
0.3
4
19
0.
70
50
0.1
5
0.3
5
6
0.5
0.6
0.2
0.
4
0.7
4
0.
0.8
0.9
1
1.2
1.4
1.6
1.8
0.1
0.14
0.36
0.7
10
80
0.8
20
0.9
90
0.2
0.13
0.37
3
0.
0.12
0.38
4
0.11
0.39
0.
100
1
0
2
3
4
5
10
20
50
0.
0
13
12
1.2
50
43
0.
8
1.
2
5
07
110
1.4
0.
1.6
08
0. 2
4
0.
09
0.
41
0.
0
0.1
0
0.4
0.
1
0. 7
33
0.
0. 18
32
4
10
50
0.1
E’ utile, allo scopo di individuare la natura (e quindi la costituzione) di circuiti in fase di misura, determinare il
comportamento in frequenza di semplici connessioni tra elementi concentrati (f1 << f2):
f2
Circuito
R-C serie
Circuito
R-L serie
f1
f1
f2
f2
Circuito
R-C parall.
f1
f2
f1
Circuito
R-L parall.
Circuito
RLC parall.
Circuito
RLC serie
f2
f1
f2
f1
Linea di
trasmissione
con ZC = Z0
terminata su
ZL ≠ Z0
f1
f2
Rappresentazioni delle reti lineari e Parametri di Scattering
Una rete lineare e tempo invariante 2-porte ammette normalmente una rappresentazione matriciale che può essere di
diversi tipi. Data la rete 2-porte rappresentata in figura:
I1
V1
I2
V2
Sono possibili diverse rappresentazioni, tra cui:
A - Matrice delle ammettenze di Corto Circuito [Y]: si ottiene cortocircuitando le porte opportune per ciascun parametro,
considerando le tensioni come grandezze applicate e le correnti come grandezze risultanti:
⎡I ⎤ ⎡ y
I = ⎢ 1 ⎥ = ⎢ 11
⎣ I 2 ⎦ ⎣ y 21
y12 ⎤ ⎡V1 ⎤
⋅
= Y ⋅V
y 22 ⎥⎦ ⎢⎣V2 ⎥⎦
y11 =
y 21 =
I1
V1
I2
V1
,
y12 =
V2 = 0
,
y 22 =
V2 = 0
I1
V2
V1 = 0
I2
V2
V1 = 0
B - Matrice delle impedenze a vuoto [Z]: si ottiene aprendo le porte opportune per ciascun parametro, considerando le
correnti come grandezze applicate e le tensioni come grandezze risultanti:
V
V
z11 = 1
, z12 = 1
⎡V1 ⎤ ⎡ z11 z12 ⎤ ⎡ I 1 ⎤
I 1 I =0
I 2 I =0
V =⎢ ⎥=⎢
2
1
⎥⋅⎢ ⎥ = Z ⋅I
⎣V2 ⎦ ⎣ z 21 z 22 ⎦ ⎣ I 2 ⎦
V
V
z 21 = 2
, z 22 = 2
I 1 I =0
I 2 I =0
2
1
C - Matrice di Trasmissione o ABCD: si ottiene aprendo o cortocircuitando la porta di uscita e considerando le
grandezze alla seconda porta come applicate e quelle alla prima porta come grandezze risultanti:
⎡V1 ⎤ ⎡ A B ⎤ ⎡ V2 ⎤
⎢I ⎥ = ⎢
⎥
⎥⋅⎢
⎣ 1 ⎦ ⎣C D ⎦ ⎣− I 2 ⎦
A=
C=
V1
V2
I1
V2
, B=
− I 2 =0
, D=
− I 2 =0
V1
− I2
V2 = 0
I1
− I2
V2 = 0
Esistono altri tipi di rappresentazione (ad es. matrice H, matrice di trasmissione inversa). Si può passare da una
rappresentazione all’altra con semplici equivalenze, a meno che la matrice di partenza non sia singolare, nel qual caso
non tutte le rappresentazioni sono possibili. Si noti che la matrice ABCD è particolarmente utile in quanto consente di
ottenere immediatamente la matrice di più reti 2-porte connesse in cascata semplicemente effettuando il prodotto delle
matrici relative alle singole reti 2-porte. Inoltre la matrice ABCD ha le seguenti proprietà:
1 - Se il circuito è simmetrico, A = D
2 - Se il circuito è reciproco AD - BC = 1
3 - Se il circuito è senza perdite, A,D∈ℜ , B,C ∈ℑ
Inoltre, la rappresentazione in termini di matrice ABCD esiste sempre (così non è per le rappresentazioni [Z] e [Y]).
Calcoliamo, a titolo di esempio, la matrice ABCD di alcune reti semplici:
A - Impedenza serie:
I1
Z
V1
I2
V2
A=
C=
V1
V2
I1
V2
= 1, B =
− I 2 =0
V1
− I2
= 0, D =
− I 2 =0
=Z
V2 = 0
I1
− I2
V2 = 0
V1
− I2
V2 = 0
=1
⎡ A B ⎤ ⎡1 Z ⎤
⎢C D ⎥ = ⎢0 1 ⎥
⎣
⎦ ⎣
⎦
B - Ammettenza parallelo :
I1
I2
A=
V1
Y
V2
C=
V1
V2
I1
V2
= 1, B =
− I 2 =0
=Y, D =
− I 2 =0
I1
− I2
=0
=1
V2 = 0
⎡ A B ⎤ ⎡ 1 0⎤
⎢C D ⎥ = ⎢Y 1⎥
⎦
⎣
⎦ ⎣
C - Cella a “L”
I1
I2
Z
Y
V1
V2
⎡ A B ⎤ ⎡1 Z ⎤ ⎡ 1 0 ⎤ ⎡1 + Z ⋅ Y
⎢C D ⎥ = ⎢0 1 ⎥ ⋅ ⎢Y 1⎥ = ⎢ Y
⎣
⎦ ⎣
⎦ ⎣
⎦ ⎣
Z⎤
1 ⎥⎦
D - Tratto di Linea di trasmissione senza perdite
I1
V1
ZC, l
I2
V2
V1 = V2 ⋅ e jβ ⋅l = V2 ⋅ cos(β ⋅ l ) − jZ C ⋅ I 2 ⋅ sin(β ⋅ l )
I 1 = − I 2 ⋅ e jβ ⋅l =
j
⋅ V2 ⋅ sin(β ⋅ l ) − I 2 ⋅ cos(β ⋅ l )
ZC
⎡ cos(β ⋅ l )
⎡A B⎤ ⎢
⎢C D ⎥ = ⎢ j ⋅ sin(β ⋅ l )
⎣
⎦
⎣ ZC
jZ C ⋅ sin(β ⋅ l )⎤
⎥
cos(β ⋅ l ) ⎥
⎦
Le rappresentazioni delle reti 2-porte lineari sin qui viste non sono direttamente misurabili a frequenze maggiori di
qualche centinaio di MHz. Si presentano infatti diversi problemi:
1 - Per misurare i parametri [Z] o [Y] è necessario, in base alla definizione, misurare tensioni a vuoto o correnti di
cortocircuito, spesso ai capi di dispositivi di dimensioni molto piccole (dell’ordine di qualche centinaio di micron). Ciò
comporta, viste le frequenze in gioco, l’impossibilità di imporre direttamente tali tipi di chiusure: imporle a qualche
distanza dal piano di riferimento del dispositivo significherebbe poi imporre un carico di tipo reattivo e non delle
terminazioni ideali (inserzione di una linea di trasmissione tra la terminazione e il dispositivo da misurare).
2 - In un circuito a microonde tensioni e correnti variano molto rapidamente attraversando il circuito stesso, in virtù delle
dimensioni ridotte, comparabili con la lunghezza d’onda del segnale: diventa quindi poco significativo misurare tensione
o corrente separatamente, ma si preferisce misurare grandezze legate ad una combinazione delle due (potenza) e che non
variano significativamente lungo una linea.
3 - Nella misura di dispositivi attivi, le condizioni di cortocircuito o circuito aperto corrispondono spesso a zone di
potenziale instabilità dei dispositivi e quindi questi ultimi non sarebbero misurabili.
Per ovviare a questi problemi, per la caratterizzazione di reti a microonde si utilizzano parametri legati alle onde (di
tensione e di corrente) incidenti e riflesse che si propagano nel circuito da misurare. Il coefficiente di riflessione è stato
precedentemente introdotto come il rapporto tra onde di tensione riflessa e incidente. In base a tale definizione, il
coefficiente di riflessione sarebbe univocamente legato alla sola onda di tensione: si potrebbe analogamente definire un
coefficiente di riflessione legato al rapporto delle onde di corrente. Per generalizzare tale definizione, si può utilizzare la
seguente:
Γ ≡
b V − Z0 ⋅ I
=
a V + Z0 ⋅ I
relativa ad un’onda incidente e riflessa espresse come combinazione lineare di V e I:
a≡
V + Z0 ⋅ I
2 ⋅ Z0
b≡
V − Z0 ⋅ I
2 ⋅ Z0
Si noti che, con questa definizione, onda incidente e riflessa hanno entrambi le dimensioni di [W½ ], in modo tale che il
loro quadrato abbia le dimensioni di una potenza. Indipendentemente dalla definizione adottata, il concetto di
coefficiente di riflessione può essere esteso al caso multiporta in maniera molto semplice: si consideri la rete 2-porte di
figura:
a1
a2
[S]
b1
b2
Alle due porte incidono due onde a1 e a2 e da esse vengono riflesse b1 e b2. Prendendo come variabili indipendenti le
onde incidenti e come dipendenti le riflesse, la descrizione della rete risultante è del tipo:
b1 ⎤ ⎡ S 11
⎥ = ⎢S
b
⎣ 2 ⎦ ⎣ 21
[b] = ⎡⎢
S12 ⎤ ⎡ a1 ⎤
⋅
= [S ]⋅ [a ]
S 22 ⎥⎦ ⎢⎣a2 ⎥⎦
La matrice risultante viene denominata Matrice di Diffusione o Scattering. Come si può notare dalla definizione di onde
incidenti e riflesse, per la misura di tale rappresentazione deve essere introdotta un’impedenza di normalizzazione Z0
(che può anche essere differente per le due porte). Dalla rappresentazione introdotta si ha:
S 11 =
S 21 =
b1
a1
b2
a1
, S 12 =
a 2 =0
S 22 =
a 2 =0
b1
a2
a1 = 0
b2
a2
a1 = 0
Quindi, per ottenere il coefficiente Sij bisognerà annullare l’onda incidente alla porta opportuna, ossia chiuderla su un
carico adattato: ciò è equivalente a terminarla sull’impedenza di normalizzazione Z0. Nel caso di circuiti con un numero
di porte superiore a due, la definizione è immediatamente estendibile.
Per la matrice di scattering valgono le seguenti proprietà:
1 - Per una rete reciproca, Sij = Sji
2 - Per una rete passiva, |Sij|≤ 1
n
2
3 - Per una rete reciproca e senza perdite:
S ij = 1
∀j = 1… n
∑
i =1