5
DINAMICA E STATICA RELATIVA
Equazioni di Lagrange in forma non conservativa
La trattazione della dinamica fin qui svolta è valida per un osservatore inerziale.
Consideriamo, ora un osservatore non inerziale. Per un osservatore inerziale vale
la legge di Newton
ma = F .
(1)
Utilizziamo il risultato del Teorema di Coriolis che lega gli osservatori inerziali e
quelli non inerziali
(2)
aass. = aS + arel + aC
e sostituiamolo nella legge di Newton
(3)
m (aS + arel + aC ) = F .
Quest’ultima può essere riscritta nella forma
marel = F − m (aS + aC ) = F + FS + FC ,
dove abbiamo definito
⎧
⎨ FS = −maS
⎩
(4)
(Forza di trascinamento)
.
FC = −maC
(5)
(Forza di Coriolis)
FS e FC sono dette forze apparenti in quanto, a differenza di F non traducono
l’azione di altri corpi sul punto P , ma sono dovute al moto dell’osservatore non inerziale rispetto a quello inerziale. Sono apparenti poichè appaiono solo all’osservatore
non inerziale. La forza F , in questo contesto, viene anche denominata Fef f. e indica
la risultante delle forze effettive sul punto P preso in esame. Generalizziamo ora,
sia le equazioni cardinali, sia il teorema dell’energia cinetica
⎧
⎪
dQrel. /dt = Ref f. + RS + RC
⎨
ef f.
rel.
S
C
dΓ(0) /dt + v0 ∧ Qrel. = M(0)
+ M(0)
+ M(0)
.
(6)
⎪
est.,int.
⎩
dTrel. /dt = Πef f. + ΠS + ΠC
Proposizione 1 La potenza legata alla forza di Coriolis è nulla.
Dimostrazione. Dalla formula dell’accelerazione di Coriolis relativa al punto P ,
si ottiene
aC = 2ω ∧ vP,rel
=⇒
aC ⊥ vP,rel
=⇒
ΠC = FC × vP,rel = 0.
=⇒
FC = −maC ⊥ vP,rel
(7)
Ci si può chiedere se, nel riferimento relativo (non inerziale) in presenza di forze
effettive conservative, vale la conservazione dell’energia. La risposta è legata alle
forze di trscinamento che non sempre si comportano come conservative.
6
Teorema 1 Il risultante delle forze di trascinamento e il risultante delle forze di
Coriolis agenti su un sistema materiale si possono calcolare supponendo tutta la
massa concentrata nel baricentro, ovvero
RS = FS (G) = −maS (G) ,
(8)
RC = FC (G) = −maC (G) .
(9)
e
Dimostrazione. Dimostriamo la (8). Scriviamo l’accelerazione di trascinamento
per il generico punto i-esimo del sistema
h
³−−−−→´i
→ ³−−−−→´
−
(10)
aS,i = a (O) + ω̇ ∧ Pi − O + ω ∧ ω ∧ Pi − O ,
dove abbiamo indicato con O, l’origine della terna mobile e con ω il vettore velocità
angolare della terna mobile rispetto alla terna inerziale. Sostituendo la definizione
di centro di massa
N
³−−−−→´
³−−−−→´ X
mi Pi − O
(11)
m G−O =
i=1
in (10), si ottiene
RS = −
N
X
i=1
mi aS,i = −
N
X
i=1
n
h
³−−−−→´io
→ ³−−−−→´
−
mi a (O) + ω̇ ∧ Pi − O + ω ∧ ω ∧ Pi − O
"
#
N
N
³−−−−→´
X
− X ³−−−−→´
→
mi Pi − O − ω ∧ ω ∧
mi Pi − O
= −ma (O) − ω̇ ∧
i=1
i=1
³−−−−→´
h
³−−−−→´i
→
−
= −ma (O)− ω̇ ∧m G − O −ω∧ ω ∧ m G − O = −ma (G) = FS (G) . (12)
Dimostriamo la (9). Dall’espressione dell’accelerazione di Coriolis
aC,i = 2ω ∧ vi,rel ,
(13)
scritta per il generico punto i-esimo, ricaviamo
RC = −
N
X
i=1
mi aC,i = −
N
X
i=1
mi [2ω ∧ vi,rel ] = −2ω ∧
N
X
i=1
mi vi,rel = −2mω ∧ vrel (G) .
(14)
Osservazione 1 Abbiamo trovato il risultante delle forze di trascinamento e di
Coriolis nel caso non inerziale. In generale, questi due sistemi di forze NON sono
equipollenti al risultante delle forze applicato al baricentro.
Caso 1 (Osservatore relativo traslante) Consideriamo il moto di un sistema
materiale rispetto ad un osservatore che si muove di moto traslatorio rispetto ad
7
un osservatore inerziale. In generale, il moto è non rettilineo e uniforme. Allora,
dalla formula (10)
→
−
ω = 0, ω̇ = 0 =⇒ aS,i = a (O) .
(15)
Le forze di trascinamento relative all’equazione 8 diventano
FS,i = mi aS,i
=⇒
RS = −
N
X
mi a (O) .
(16)
i=1
In questo caso, le forze di trascinamento costituiscono un sistema di forze parallele,
di intensità proporzionale alla massa di ciascun punto e quindi al suo peso. Il
centro di talesistema di forze parallele è il baricentro stesso. Il sistema è quindi
equipollente al risultante applicato nel baricentro.
Caso 2 (Osservatore relativo ruotante uniformemente) Per iniziare, consideriamo il caso di un sistema formato da un punto materiale di massa m. Sia z
l’asse di rotazione fisso nello spazio e sia ω = costante, il vettore velocità angolare
dell’osservatore relativo (non inerziale) rispetto all’osservatore fisso (inerziale). In
questo caso la forza di trascinamento si chiama forza centrifuga. Sia O un punto
appartenente all’asse di rotazione. Poichè l’origine è fissa, a (O) = 0 e, poichè la
→
−
velocità angolare è costante ω̇ = 0. Segue che
n
h
³−−−−→´io
FS = −m ω ∧ ω ∧ P − O
.
(17)
Prendiamo il punto P ∗ , proiezione ortogonale di P sull’asse z e scriviamo
−−→
−−−−→ −−−−→∗ −−
P − O = P − P + P ∗ − O.
(18)
Calcoliamo
h
³−−−−→´i
n
h³−−−−→´ ³−−−−→´io
ω ∧ ω ∧ P − O = ω ∧ ω ∧ P − P∗ + P∗ − O
n
h³−−−−→´io
n
h³−−−−→´io
+ ω ∧ ω ∧ P∗ − O
.
= ω ∧ ω ∧ P − P∗
(19)
h
³−−−−→´i
³−−−−→´
ω ∧ ω ∧ P − P ∗ = −ω 2 P − P ∗ .
(22)
n
h³−−−−→´io
ω ∧ ω ∧ P∗ − O
= 0,
(23)
Il primo termine diventa
h
³−−−−→´i
h
³−−−−→´i
³−−−−→´
ω ∧ ω ∧ P − P∗
=
ω × P − P ∗ ω − [ω × ω] P − P ∗ .
doppio prodotto
vettore
(20)
Ma
³−−−−→´
³−−−−→´
ω ⊥ P − P∗
=⇒ ω × P − P ∗ = 0.
(21)
Quindi
Il secondo termine vale
8
³−−−−→´
poichè P ∗ ∈ asse z, il che implica ω k P ∗ − O . Quindi
³
´
2 −−−−→
∗
FS = mω P − P .
Dato un sistema di punti, il risultante delle forze centrifughe diventa
³−−−−→´
RS = mω 2 G − G∗ .
(24)
(25)
Proposizione 2 Le forze centrifughe sono conservative
Dimostrazione. Per semplicità, consideriamo ancora il caso del punto materiale
di massa m. Calcoliamo il lavoro virtuale per uno spostamento virtuale δ P del
punto P (ρ, θ, z), dove ρ = |P − P ∗ |. Si ottiene
δ P (ρ, θ, z) =
∂P
∂P
∂P
δρuρ +
δθuθ +
δzuz
∂ρ
∂θ
∂z
(26)
e il lavoro virtuale diventa
¶
µ
³−−−−→´
1
∗
2
2 2
(27)
δ L = FS × δ P = mω P − P × δ P = mω ρδρ = δ
mω ρ .
2
−−−−→
Si noti che P − P ∗ = ρuρ , dove uρ è il versore diretto perpendicolarmente rispetto
all’asse z e ha come verso il verso che si allontana da z. Il potenziale delle forze
centrifughe per il punto materiale si esprime come
∗
2
1
1
US = mω 2 ρ2 = Iω ω2 ,
(28)
2
2
dove Iω è il momento d’inerzia rispetto all’asse z. La generalizzazione a un sistema
di N punti o a un corpo continuo è immediata.
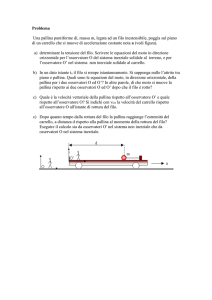
Esempio 1 Un’asta omogenea di massa M e lunghezza l è incernierata nel suo
estremo O ed è posta in un piano uniformemente ruotante con velocità angolare
ω attorno all’asse verticale per O. All’estremo dell’asta, viene fissata una massa
puntiforme di valore m. Determinare le posizioni di equilibrio relativo dell’asta.
9
Poichè il sistema è non inerziale, il risultante delle forze centrifughe, contrariamente a quanto uno si aspetti, non viene applicato nel baricentro. Questo effetto è
dovuto alla dipendenza delle forze centrifughe dalla distanza dell’asse di rotazione.
E’ necessario calcolare il vero centro di applicazione delle forze centrifughe. Applichiamo la definizione e iniziamo con l’asse y
¡M ¢ 2
¤
Rl
ω2 s sin θ (s cos θ) ds
ω sin θ cos θ 0 [s2 ] ds
cos θl3 /3
2
l
=
=
=
yC = R l
=
l cos θ.
¡M ¢
R l ¡M ¢
Rl
2 /2
2 s sin θds
2 sin θ
l
3
dF
sds
ω
ω
s
l
l
0
0
0
(29)
Analogamente, troviamo per xC = 2l sin θ/. Calcoliamo il momento dell’asta
rispetto al polo O (equazione pura)
Rl
0
dFs y
R l £¡ M ¢
0
l
µ
¶µ
¶
¡
¢
2
l
2l
MO = Mg sin θ+mgl sin θ− Mω sin θ
l cos θ − mω 2 l sin θ (l cos θ) = 0.
2
2
3
(30)
Ricaviamo
µ
¶
µ
¶
M
M
+ m gl sin θ =
+ m ω2 l2 sin θ cos θ
(31)
2
3
che ha soluzioni
sin θ = 0
e
3
2ω2 l
µ
=⇒ θ = 0, π
¶
M + 2m
g = cos θ,
M + 3m
la quale ha validità solo per
µ
¶
M + 2m
3
g
1 ≥ cos θ = 2
2ω l M + 3m
=⇒ 2ω 2 l (M + 3m) ≥ 3 (M + 2m) g.
(32)
(33)
(34)
Un altro modo di risolvere il problema è dato dall’uso della stazionarietà del potenziale
l
1
1¡ 2 2 ¢ 2
U (θ) = Mg cos θ + mgl cos θ + Iω ω2 +
ml sin θ ω
2
2
2
µ 2
¶
1
l
l
1¡ 2 2 ¢ 2
2
M sin θ ω 2 +
ml sin θ ω .
= Mg cos θ + mgl cos θ +
(35)
2
2
3
2
Derivando otteniamo
¡
¢
l
l2
U 0 (θ) = −Mg sin θ − mgl sin θ + Mω 2 sin θ cos θ + ml2 sin θ cos θ ω 2 = 0
2
3
equivalente alla 30.
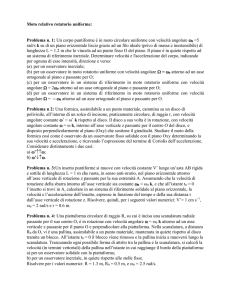
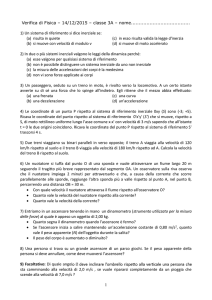
Esempio 2 Un anellino di massa m scorre senza attrito su una guida circolare
di raggio R che ruota con velocità angolare ω. Al tempo t = 0, l’anellino è nella
posizione θ = 0 con velocità nulla. Determinare il valore di ω, affinché l’anellino
raggiunga la posizione θ = π/2 con velocità nulla. Si determini, inoltre, la potenza
10
del motore in funzione della posizione.
L’unica forza attiva è la forza peso. All’istante iniziale
θ (0) = θ̇ (0) = 0.
(36)
Poichè non ci sono attriti e le forze centrifughe ammettono potenziale, possiamo
usare la conservazione dell’energia meccanica
T − U = E.
Scriviamo T − U
1 ³ ´2 1
T − U = m Rθ̇ − m (R sin θω)2 − mgR cos θ.
2
2
(37)
termine centrifugo
L’energia totale iniziale è
E = −mgR.
Vogliamo che
θ̇
quindi
³π ´
2
= 0,
r
1
2g
2
− m (Rω) = −mgR =⇒ ω =
.
2
R
Per calcolare la potenza del motore, usiamo il teorema dell’energia cinetica
dT
= Π.
dt
(38)
(39)
(40)
(41)
L’energia cinetica è data dall’energia cinetica dell’anellino sommata all’energia
cinetica dovuta alla velocità di trascinamento:
¸
∙³ ´
2
1
2
(42)
T = m Rθ̇ + (R sin θω) .
2
11
La potenza Π è data dalla somma della potenza del motore più la potenza della
forza peso
³
´
Π = Πmotore + Πpeso = Πmotore + −mgRθ̇ sin θ ,
(43)
quindi
Πmotore = m
h³
´
i
R2 θ̇θ̈ + R2 cos θ sin θω 2 θ̇ + mgRθ̇ sin θ.
(44)
Dalla conservazione dell’energia, ricaviamo θ̇
2
θ̇ =
2g (cos θ − 1)
+ (sin θω)2 .
R
(45)
Derivando rispetto al tempo t, otteniamo
2θ̇θ̈ = −
2g sin θθ̇
+ 2 sin θ cos θθ̇ω2
R
=⇒
Sostituendo θ̇ e θ̈ in Πmotore , si ottiene
"
r
Πmotore = m 2R2 cos θ sin θω 2
θ̈ = −
g sin θ
+ sin θ cos θω2 .
R
#
2g (cos θ − 1)
+ (sin θω)2 .
R
(46)
(47)