Facoltà di Scienze Matematiche, Fisiche e Naturali
Corso di Laurea Triennale in Matematica
Tesi di Laurea Triennale
Superfici di Riemann,
teorema di Riemann-Roch
e applicazioni
Candidato:
Relatore:
Denis Nardin
Prof. Angelo Vistoli
Anno Accademico 2009/2010
Indice
1 Divisori ed equivalenza lineare
1.1 Il concetto di divisore . . . . . . . . . . . . . . . . . . . . . . . .
1.2 La ramificazione di una mappa . . . . . . . . . . . . . . . . . . .
2 Il teorema di Riemann-Roch
2.1 Spazi L(D) . . . . . . . . .
2.2 Disuguaglianza di Riemann
2.3 Dualità di Serre . . . . . . .
2.4 Teorema di Riemann-Roch .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
4
7
12
12
14
16
21
3 Mappe olomorfe negli spazi proiettivi
23
3.1 Sistemi lineari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 Mappe negli spazi proiettive . . . . . . . . . . . . . . . . . . . . . 24
3.3 Mappa canonica . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 Curve algebriche e analitiche
30
4.1 Curve analitiche . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2 Curve algebriche . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3 Formule genere-grado . . . . . . . . . . . . . . . . . . . . . . . . 38
1
Introduzione
Una superficie di Riemann è una varietà complessa connessa di dimensione 1. È
noto che le superfici di Riemann compatte hanno un legame molto profondo con
le curve algebriche, cioè con i chiusi di Zariski in Pn irriducibili e di dimensione
1. In questa tesi analizzerò questo legame, soprattutto attraverso lo studio delle
mappe olomorfe
ϕ : X → Pn
Lo strumento principale per compiere questa analisi è il concetto di divisore.
Un divisore su una superficie di Riemann compatta X non è altro che una
somma formale finita di punti di X a coefficienti in Z. I divisori vengono usati
in questo genere di problemi perchè è possibile rappresentare l’intersezione di
una curva con un iperpiano attraverso un divisore sulla curva, che rappresenta
in un certo senso le intersezioni contate con molteplicità.
Questa tesi è divisa in quattro capitoli, di cui adesso presenterò brevemente
il riassunto.
Nel primo capitolo comincio a studiare alcuni esempi importanti di divisori. In particolare definisco i divisori principali, che permettono di presentare
la relazione di equivalenza lineare tra divisori. Introdurrò anche i concetti
di ramificazione di una mappa olomorfa e di grado. Questi, oltre a essere importanti di per sè, mi permetteranno di enunciare e dimostrare la formula di
Riemann-Hurwitz.
Il secondo capitolo è essenzialmente una dimostrazione del teorema di RiemannRoch. Quella che presento è la dimostrazione classica di Weil, utilizzando gli
adele che, anche se poco geometrica, ha il pregio di far ottenere alcuni risultati
algebrici collaterali. In particolare dimostro che il campo delle funzioni meromorfe ha grado di trascendenza 1 su C. In questo capitolo mi sono ispirato
soprattutto alle dimostrazioni in [Mir95] e a [Ful95]
Nel terzo capitolo introduco il legame che c’è tra i divisori e le mappe in
Pn . Introduco infatti il concetto di sistema lineare di divisori, cioè di una
famiglia di divisori linearmente equivalenti che porta in modo naturale una
struttura di spazio proiettivo. Dimostrerò che per ogni mappa ϕ : X → Pn
esiste un sistema lineare |ϕ| e un isomorfismo ϕ∗ : Pn∗ → |ϕ| che essenzialmente
associa ogni iperpiano di Pn alla sua intersezione con ϕ(X) (che è proprio una
famiglia di punti contati con molteplicità). Il risultato centrale a cui arrivo nel
capitolo è che la corrispondenza che associa ad ogni mappa ϕ il suo sistema
2
lineare è biunivoca, a patto di considerare solo sistemi lineari che siano privi
di punti fissi. Il capitolo si conclude con la costruzione della mappa canonica e
una classificazione quasi completa delle superfici di Riemann di genere minore
o uguale a 2. Questa esposizione segue molto quella di [Mir95], con qualche
generalizzazione in alcuni risultati collaterali.
Il quarto capitolo invece studia i rapporti tra le superfici di Riemann compatte e le curve algebriche. Il risultato principale di questa sezione è che le
mappe da una superficie di Riemann compatta a P2 che siano essenzialmente
iniettive1 corrispondono alle curve algebriche. Questo ci permetterà anche di
determinare ulteriori classificazioni delle superfici di Riemann. Ad esempio, si
vedrà che le superfici di Riemann di genere 3 si dividono in due famiglie distinte:
le quartiche piane e le curve iperellittiche di genere 3.
1 cioè
iniettive al di fuori di un numero finito di punti
3
Capitolo 1
Divisori ed equivalenza
lineare
1.1
Il concetto di divisore
Ricordiamo che una superficie di Riemann è una varietà complessa connessa
di dimensione 1. Daremo per note tutte le proprietà classiche delle funzioni
olomorfe di una variabile complessa, ed in particolare
Teorema 1.1.1 (Residui). Sia ω una 1-forma meromorfa non nulla. Allora
X
Resp (ω) = 0
p∈X
Dimostrazione. Si veda ad esempio [Mir95] teorema 3.17, o [Car95] sezione III.2.
Teorema 1.1.2. Sia X una superficie di Riemann compatta. Allora esiste una
funzione meromorfa non costante f ∈ M(X).
Dimostrazione. Si veda ad esempio [FKr80], sezione II.5.
Indicheremo con M(X) il campo delle funzioni meromorfe su X, e con Ω(X)
l’insieme delle 1-forme meromorfe su X. Osserviamo che Ω(X) è in modo naturale uno spazio vettoriale su M(X), con l’operazione di moltiplicazione punto
per punto.
Lemma 1.1.3. Ω(X) è uno spazio vettoriale su M(X) di dimensione 1.
Dimostrazione. Intanto sappiamo che la dimensione è almeno 1. Infatti, se f ∈
M(X) non è costante, df è una 1-forma meromorfa non nulla. Per concludere
dobbiamo dimostrare che date due 1-forme meromorfe ω1 , ω2 non nulle esiste
una funzione f ∈ M(X) tale che ω1 = f ω2 . Per ogni punto p ∈ X scegliamo
una coordinata locale z centrata in p. Allora possiamo scrivere ω1 = f1 dz e
4
ω2 = f2 dz. Definiamo f = f1 /f2 . Si tratta di vedere che queste definizioni
locali si incollano ad una funzione meromorfa f ∈ M(X). Infatti sia z = φ(w)
un’altra coordinata locale. Allora
ω1 = f1 (φ(w))φ0 (w)dw
ω2 = f2 (φ(w))φ0 (w)dw .
E poichè
f1 ◦ φφ0
=f ◦φ
f2 ◦ φφ0
le varie definizioni locali si incollano ad una funzione meromorfa globale.
Consideriamo ora un’altra situazione. Sia f ∈ M(X) una funzione meromorfa su di una superficie di Riemann X. Sia p ∈ X e z coordinata locale in p.
Allora in un intorno di p possiamo scrivere
f (z) = z n h(z)
per una qualche h olomorfa con h(0) 6= 0 e n ∈ Z. Facendo un cambio di
coordinate z = φ(w) si vede immediatamente che il valore di n non dipende
neanche qui dalla scelta di coordinate. Il valore di n è detto ordine di f in p
e viene indicato con ordp (f ). I punti in cui ordp (f ) 6= 0 sono esattamente gli
zeri e i poli di f , perciò sono un insieme discreto e quindi finito perchè X è
compatta.
Si può ripetere pari pari la costruzione per una 1-forma meromorfa ω e
definire l’ordine di ω in p come l’unico n ∈ Z tale che si scriva
ω = z n h(z)dz
Con h olomorfa in 0, h(0) 6= 0. Questo è indicato analogamente con ordp (ω).
Lo strumento principale che useremo in questa tesi sono i divisori. Se X è
una superficie di Riemann compatta un divisore su X è una funzione D : X → Z
a supporto finito. In altri termini l’insieme
{p ∈ X | D(p) 6= 0}
sarà un insieme finito. Indicheremo e penseremo sempre i divisori come somme
formali di punti, in questo modo
X
D=
D(p) · p
p∈X
Esempi di divisori sono quindi p + q, p − q, p + 2q − r,. . . Il valore D(p) di D in
un punto p ∈ X è detto molteplicità o ordine di D in p.
I divisori hanno una naturale struttura di gruppo abeliano data dalla somma
punto per punto, cioè
(D + E)(p) = D(p) + E(p)
5
Il gruppo di tutti i divisori su X verrà indicato con Div(X). Poichè il supporto
di ogni divisore è finito, possiamo definire un naturale omomorfismo di gruppi
deg : Div(X) → Z
detto grado del divisore, come
X
deg D =
D(p)
p∈X
cioè il grado di D è la somma di tutte le molteplicità di D nei punti di X.
Sui divisori è possibile anche definire un ordinamento parziale in questo modo
D ≥ E ⇔ D(p) ≥ E(p) ∀p ∈ X
Un divisore E ≥ 0 è detto effettivo. Dati due divisori D, E possiamo definire
sup(D, E) e inf(D, E) nel modo ovvio. Osserviamo che
D = sup(D, 0) − sup(−D, 0)
cosicchè ogni divisore può essere scritto in modo naturale come differenza di due
divisori effettivi.
Vediamo ora un esempio importante di divisore. Sia f ∈ M(X) una funzione
meromorfa non nulla. Allora possiamo definire il divisore associato ad f come
X
(f ) =
ordp (f ) · p
p∈X
Si vede immediatamente che valgono le formule
(f g) = (f ) + (g)
(1) = 0
perciò la mappa che manda f in (f ) è un omomorfismo di gruppi dal gruppo moltiplicativo M(X)∗ al gruppo additivo Div(X). La sua immagine è un
sottogruppo, detto gruppo dei divisori principali e indicato con P Div(X).
Sia f ∈ M(X)∗ . Vogliamo dimostrare che deg(f ) = 0, cioè che f ha “tanti
poli quanti zeri se contati con molteplicità”. Consideriamo l’1-forma meromorfa
ω = df /f . Sia ora p ∈ X e k = ordp (f ). Prendiamo una coordinata locale z
centrata in p in modo che
f (z) = z k h(z)
con h(0) 6= 0 Allora in un intorno di p vale
ω = df /f =
z k h0 (z) + kz k−1 h(z)
dz =
z k h(z)
k
1 h0 (z)
+
z
h(z)
dz
Poichè h0 /h è olomorfa in un intorno di 0, ne segue che Resp (ω) = k = ordp (f ).
Ma dal teorema dei residui
X
X
deg f =
ordp (f ) =
Resp (ω) = 0
p∈X
p∈X
6
Due divisori D, E si dicono linearmente equivalenti e lo indichiamo con
D ∼ E se D − E è un divisore principale, cioè se e solo se esiste f ∈ M(X)∗
tale che
D − E = (f )
Si vede immediatamente che l’equivalenza lineare è una relazione di equivalenza, anzi è proprio l’equivalenza indotta dal sottogruppo P Div(X) dei divisori
principali. Poichè il grado di un divisore principale è zero, è chiaro che divisori
linearmente equivalenti hanno lo stesso grado.
Analogamente ai divisori principali, è possibile definire anche i divisori delle 1-forme. Più concretamente, se ω è una 1-forma meromorfa, il divisore
associato ad ω è
X
(ω) =
ordp (ω) · p
p∈X
Come prima vale l’immediata formula
(f ω) = (f ) + (ω)
I divisori delle 1-forme sono detti divisori canonici, e l’insieme dei divisori
canonici è detto classe canonica. In questa tesi la indicheremo solitamente
con KDiv(X), o più spesso semplicemente K.
Osserviamo che, poichè due qualsiasi 1-forme meromorfe ω1 , ω2 sono proporzionali tramite una funzione meromorfa, abbiamo che i divisori canonici sono a
due a due linearmente equivalenti e, anzi, formano un’intera classe di equivalenza
lineare.
1.2
La ramificazione di una mappa
Consideriamo ora una mappa olomorfa F : X → Y tra due superfici di Riemann
compatte. Un’importante osservazione, che segue dal teorema della mappa aperta, è che se F non è costante, allora è surgettiva. Sia p ∈ X e studiamone il
comportamento locale in p. Prendiamo una coordinata locale z centrata in p e
una coordinata locale w centrata in F (p). Allora possiamo scrivere
w(F (z(q))) = z(q)k h(z)
dove h è una funzione olomorfa in un intorno di zero tale che h(0) 6= 0 e k ≥
1. Ma allora, almeno in un intorno di zero, possiamo scrivere h = rk , per
un’opportuna funzione olomorfa r. Osserviamo inoltre che la funzione zr(z)
è una funzione olomorfa con differenziale diverso da 0 nell’origine. Perciò, a
meno di restringersi ulteriormente ad un intorno di 0 possiamo prendere un’altra
coordinata z 0 = zr(z) e scrivere
w(F (z 0 (q))) = z 0 (q)k
Inoltre il valore di k è indipendente dalla scelta delle coordinate, come si può
facilmente verificare. Inoltre se in un punto k > 1, in tutti i punti vicini k = 1,
perchè k > 1 se e solo se dF si annulla in p. In sostanza abbiamo appena
dimostrato
7
Lemma 1.2.1. Siano X, Y superfici di Riemann e sia F : X → Y una mappa
olomorfa. Allora per ogni punto p ∈ X e per ogni coordinata locale w intorno a
F (p) è possibile scegliere una coordinata locale z intorno a p tale che
w(F (q)) = z(q)n+1
nell’intorno di p dove questa formula è definita. Inoltre il valore di n non
dipende dalla scelta della carta ed è detto indice di ramificazione di F in p,
indicato con RF (p).
Inoltre RF (p) = 0 per tutti i p ∈ X eccettuato al più un numero finito.
Se F : X → Y è una mappa olomorfa, indichiamo con RF il suo divisore
di ramificazione, definito da
X
RF =
RF (p) · p
p∈X
Definiamo il pullback di un divisore D ∈ Div(Y ) come
(F ∗ D)(p) = (RF (p) + 1)D(F (p))
come il valore del divisore in F (p) contato con molteplicità.
Vediamo cosa succede se componiamo due mappe
Lemma 1.2.2. Siano F : X → Y e G : Y → Z mappe olomorfe tra superfici
di Riemann. Allora per ogni p ∈ X
RG◦F = F ∗ RG + RF .
Dimostrazione. Dalla definizione è chiaro che possiamo prendere coordinate
locali z, w, t in un intorno di p, F (p), G(F (p)) rispettivamente tali che
w(F (q)) = z(q)RF (p)+1
t(G(r)) = w(r)RG (F (p))+1
con q in un intorno di p e r in un intorno di F (p). Ma allora, componendo
queste due mappe
t(G(F (q))) = z(q)(RG (F (p))+1)(RF (p)+1)
cioè RG◦F (p) + 1 = (RG (F (p)) + 1)(RF (p) + 1). Ma questa, guardando le
definizioni, è proprio la tesi.
Vorremmo dare fondamento all’idea intuitiva che l’indice di ramificazione
“conta” in un certo senso la molteplicità del punto. Vorremmo cioè arrivare
a un enunciato del tipo “la cardinalità della controimmagine di un qualunque
punto q ∈ Y è indipendente da q purchè i punti vengano contati con l’opportuna
moleplicità”. Per fare questo definiamo il grado di F come
X
deg F =
RF (p) + 1
F (p)=q
Dimostriamo ora
8
Lemma 1.2.3. Il grado di F non dipende dalla scelta di q.
Dimostrazione. Dimostriamo che se RF (p) > 1, esiste un intorno U di p tale
che
• F (U ) è un intorno di F (p)
• per ogni p0 ∈ U , diverso da p vale RF (p0 ) = 0
• per ogni q ∈ F (U ), q 6= F (p) la controimmagine di q è costituita da
RF (p) + 1 punti distinti
questo chiaramente dimostra che deg F è localmente costante, da cui la tesi.
Per trovare un tale U , è sufficiente scegliere una coordinata locale z centrata in
p di modo che
F (z) = z k
con k = RF (p) + 1, e poi scegliere come U = {|z| < ε} con un ε sufficientemente
piccolo di modo che il dischetto stia nel dominio di z. Con questa scelta è un
semplice esercizio vedere che le condizioni sono verificate.
Vediamo un attimo alcune proprietà del grado
Lemma 1.2.4. Sia F : X → Y e G : Y → Z mappe olomorfe e D divisore su
Y . Allora valgono
deg(GF ) = deg G deg F
deg F ∗ D = deg F deg D
Dimostrazione. Si tratta di verifiche immediate dalle definizioni.
Dimostriamo un caso particolare della formula di Riemann-Hurwitz
Proposizione 1.2.5 (Formula di Riemann-Hurwitz 1). Sia F : X → P1 una
funzione meromorfa non costante. Allora vale l’uguaglianza
2g(X) − 2 = deg RF − 2 deg F
dove g(X) è il genere topologico di X.
Traccia di dimostrazione. Vediamo F come mappa olomorfa a valori in P1 . Siano z1 , . . . , zn i valori di ramificazione di F e triangoliamo P1 per mezzo di
una triangolazione che abbia gli zi tra i vertici. Supponiamo che questa abbia f 2-facce, l 1-facce e v 0-facce. Allora f − l + v = 2. Ora, F ristretta a
X\F −1 ({z1 , . . . , zn }) è un rivestimento, percio possiamo sollevare i lati e le facce in esattamente deg F modi. Inoltre i sollevamenti, uniti alle controimmagini
dei vertici, danno una triangolazione di X con f deg F 2-facce e l deg F 1-facce.
Per quanto riguarda le 0-facce, per ogni vertice z ∈ P1 vale
X
deg F =
RF (p) + 1
F (p)=z
9
e perciò il numero di contoimmagini distinte di ogni vertice è
X
deg F −
RF (p)
F (p)=z
Di conseguenza ci sono in tutto
v deg F −
X
RF (p)
p∈X
vertici. Ricordando che la caratteristica di Eulero di X è uguale a 2 − 2g(X),
ma anche dalla somma con segni alterni delle cardinalità delle facce di ogni
triangolazione, otteniamo la tesi.
Osserviamo che per i divisori canonici potrebbe essere interessante studiare
la discrepanza che c’è tra il divisore del pullback e il pullback del divisore.
Lemma 1.2.6. Sia F : X → Y mappa olomorfa tra superfici di Riemann e ω
1-forma meromorfa su Y . Allora
(F ∗ ω) = F ∗ (ω) + RF
Dimostrazione. Fissiamo p ∈ X e verifichiamo che l’uguaglianza valga in p.
Scegliamo delle coordinate locali opportune tali che F (z) = z n . In queste coordinate sia ω = wk f (w)dw con f (0) 6= 0. Allora F ∗ ω = nf (z n )z nk+n−1 dz per
cui
(F ∗ ω)(p) = nk + n − 1
Ma F ∗ (ω)(p) = (ω)(F (p))(RF (p) + 1) = kn e sostituendo tutto otteniamo che
la tesi diventa un’ovvia identità.
Grazie alle informazioni che abbiamo ottenuto possiamo finalmente calcolare
i gradi dei divisori canonici.
Proposizione 1.2.7. Se ω è una 1-forma meromorfa deg(ω) = 2g − 2, dove g
è il genere topologico della superficie.
Dimostrazione. Poichè i divisori canonici formano una classe di equivalenza lineare in particolare hanno tutti lo stesso grado, quindi è sufficiente calcolare
il grado di un ben specifico divisore. Prendiamo ora una funzione meromorfa
f vista come mappa da X a P1 funzione meromorfa e consideriamo l’1-forma
df = f ∗ (dz). Allora
(df ) = (dz) deg f + Rf
Quindi prendendo i gradi
deg(df )) = −2 deg f + deg Rf
Ma dalla formula di Riemann-Hurwitz nel caso particolare che abbiamo dimostrato, il membro di sinistra è proprio 2g − 2.
10
Teorema 1.2.8 (Formula di Riemann-Hurwitz). Sia F : X → Y una mappa
olomorfa non costante tra superfici di Riemann. Allora
2g(X) − 2 = (2g(Y ) − 2) deg F + deg RF
Dimostrazione. È sufficiente prendere i gradi nel lemma 1.2.6.
11
Capitolo 2
Il teorema di
Riemann-Roch
In questo capitolo introdurremo alcuni spazi di funzioni associati ad un divisore
D. Le dimensioni di questi spazi sono collegate da alcune relazioni, di cui sicuramente la più importante è il teorema di Riemann-Roch, la cui dimostrazione
è lo scopo principale del presente capitolo. Questo teorema però è all’apparenza
molto poco significativo (ma solo all’apparenza!), e la sua dimostrazione è molto
difficile e indiretta. Tuttavia non tutta la fatica è sprecata, perchè otterremo
come corollari alcuni risultati di interesse intrinseco, tra cui una descrizione
algebrica del campo M(X) delle funzioni meromorfe su X.
2.1
Spazi L(D)
Sia D un divisore su di una superficie di Riemann compatta X. Definiamo lo
spazio L(D) come
L(D) = {f ∈ M(X)\{0} | (f ) + D ≥ 0} ∪ {0}
Le funzioni che stanno in L(D) sono funzioni tali che il loro polo in p ∈ X non
supera −D(p). Quindi ad esempio le funzioni di L(0) sono le funzioni olomorfe
su X e perciò
L(0) = O(X) = C
Dalle proprietà elementari dei divisori, segue che L(D) è in realtà uno spazio
vettoriale. Inoltre se D ≤ E è evidente che L(D) ⊆ L(E). Il nostro scopo
sarà studiare la dimensione di questi spazi vettoriali. Per comodità di notazione
indichiamo con `(D) la dimensione di L(D). Cominciamo dimostrando che
questi spazi hanno dimensione finita.
Lemma 2.1.1. Sia D un divisore su X e p ∈ X un punto. Allora `(D − p) è
finita se e solo se lo è `(D) e vale
`(D − p) ≤ `(D) ≤ `(D − p) + 1
12
Dimostrazione. Poichè L(D−p) ⊆ L(D), una freccia e la relativa disuguaglianza
sono ovvie. Scegliamo una coordinata locale z in p. Prendiamo ora la mappa
v che va da L(D) a C che manda f ∈ L(D) nel valore della funzione z D(p) f
valutata in p. Questa è ben definita, perchè la funzione è olomorfa in p per
definizione di L(D). Inoltre il suo nucleo è costituito proprio dalle funzioni in
L(D − p). Ma allora se `(D − p) < ∞, anche `(D) lo è e vale
`(D) = `(D − p) + dim Im v ≤ `(D − p) + 1
Osserviamo che una facile induzione permette di concludere che se E è un
divisore effettivo vale la stima
`(E) ≤ 1 + deg E
Poichè ogni divisore è maggiorato da un divisore effettivo (è sufficiente D ≤
sup(D, 0)), possiamo concludere che `(D) < ∞ per ogni divisore D e anzi che
vale la stima
`(D) ≤ 1 + deg sup(D, 0)
Vediamo ora in che rapporto stanno le dimensioni di due differenti spazi
L(D) e L(E)
Lemma 2.1.2. Siano D, E due divisori tali che D ≥ E. Allora
`(D) − `(E) ≤ deg D − deg E
Dimostrazione. La tesi segue dal lemma 2.1.1 con una facile induzione
Analogamente agli L(D), è possibile introdurre un concetto simile per le
1-forme. Questo ci porta alla costruzione degli spazi Ω(D), definiti nel modo
seguente
Ω(D) = {ω ∈ Ω(X) | (ω) ≥ D} ∪ {0}
Questa definizione è posta in modo tale che se f ∈ L(D) e ω ∈ Ω(D) per lo
stesso divisore D, allora la 1-forma f ω è olomorfa.
Lemma 2.1.3. Se f ∈ M(X), la mappa µf : L(D) → L(D − (f )) data da
µf (g) = f g
è un isomorfismo di spazi vettoriali. In particolare il numero `(D) dipende solo
dalla classe di equivalenza lineare di D.
Se ω ∈ Ω(X) la mappa µω : L(D) → Ω((ω) − D) data da
µω (g) = gω
è un isomorfismo di spazi vettoriali. In particolare dim Ω(D) = `(K − D) se K
è un qualunque divisore canonico.
13
2.2
Disuguaglianza di Riemann
In tutta la discussione successiva supporremo che f : X → P1 sia una funzione
meromorfa non nulla e che E = (f )∞ sia il suo divisore dei poli.
Lemma 2.2.1. Sia D un divisore su X. Allora esiste un polinomio p ∈ C[z]
tale che D ≤ (p(f ))∞ + mE per qualche m ∈ Z. In particolare se h è una
fuzione meromorfa esiste p ∈ C[z] tale che p(f )h non abbia poli al di fuori dei
poli di f .
Dimostrazione. È sufficiente prendere
Y
p(z) =
(z − f (p))−D(p)
D(p)<0
f (p)6=∞
come si verifica immediatamente. La seconda parte del lemma segue dalla prima
ponendo D = (h)∞ .
Abbiamo visto che esiste una semplice stima dall’alto per `(D). Vogliamo ora
trovarne una dal basso. Questo è un compito molto difficile perchè già il fatto che
esista una funzione meromorfa non costante è altamente non banale. Tuttavia
una volta fatto questo si possono ottenere risultati interessanti studiando le
proprietà algebriche di M(X).
Proposizione 2.2.2. Supponiamo che [M(X) : C(f )] ≥ k. Allora esiste un
m0 ∈ N tale che per ogni m ≥ m0
`(mE) ≥ (m − m0 + 1)k
Inoltre dev’essere k ≤ deg f .
Dimostrazione. Prendiamo h1 , . . . , hk ∈ M(X) linearmente indipendenti su
C(f ). Per il lemma precedente possiamo sceglierle tali che hi non abbia poli al di fuori dei poli di f . Perciò esisterà un m0 tale che hi ∈ L(m0 E) per ogni
i = 1, . . . , k. Fissiamo ora m > m0 . Di conseguenza vale
f j hi ∈ L(mE)
per ogni j = 0, . . . , m − m0 . Inoltre queste sono tutte linearmente indipendenti
su C, altrimenti ci sarebbe una relazione di dipendenza lineare su C(f ) delle hi .
Quindi la dimensione di L(D) è almeno il loro numero, che è proprio (m − m0 +
1)k.
Supponiamo ora k ≥ deg f + 1. Allora
`(mE) ≥ (m − m0 + 1)(1 + deg f )
ma
`(mE) ≤ 1 + deg(mE) = 1 + m deg f
14
Per cui, mettendo assieme le due disuguaglianze
1 ≥ m + (1 − m0 )(1 + deg f )
che è assurdo per grandi m.
Osservazione 2.2.3. La proposizione precedente ci dice che M(X) è un’estensione finita di C(f ) di grado al più deg f . Quindi in particolare abbiamo che il
grado di trascendenza di M(X) su C è esattamente 1. Vedremo in seguito che
[M(X) : C(f )] è proprio deg f .
Chiamiamo ora genere aritmetico di X e lo indichiamo con ga , il massimo
numero tale che la disuguaglianza
`(mE) ≤ m deg f + 1 − ga
valga per ogni m. Dimostreremo in seguito che ga è uguale al genere topologico
g della superficie.
La proposizione precedente può essere facilmente generalizzata a ogni divisore, ottenendo cosı̀ una stima per `(D) che ha il pregio di diventare un’uguaglianza per deg D sufficientemente alto.
Teorema 2.2.4 (Disuguaglianza di Riemann). Sia X una superficie di Riemann. Allora
1. per ogni divisore D su X vale
`(D) ≥ deg D + 1 − ga
2. esiste un intero N tale che per ogni divisore D tale che deg D ≥ N vale
`(D) = deg D + 1 − ga
Dimostrazione. Nelle notazioni della proposizione precedente, dimostriamo il
primo punto per un divisore D tale che D ≤ mE per qualche m ≥ m0 . Infatti
per il lemma 2.1.2
`(D) ≥ `(mE) + deg D − deg mE ≥ deg D + 1 − ga
Supponiamo ora che D sia un divisore generico. Allora per il lemma 2.2.1 esiste
una funzione meromorfa h tale che D − (h) ≤ mE per qualche m ≥ m0 . Di
conseguenza, per quanto già dimostrato
`(D) = `(D − (h)) ≥ deg(D − (h)) + 1 − ga = deg D + 1 − ga
Ora, per la minimalità di ga , esiste un m1 ≥ m0 tale che
`(m1 E) = m1 deg f + 1 − ga
15
Sia N = m1 deg f + ga . Allora se D è un divisore di grado deg D ≥ N , abbiamo
`(D − m1 E) ≥ deg(D − m1 E) + 1 − ga ≥ 1
quindi esiste h ∈ M(X) tale che (h) + D ≥ m1 E. Quindi a meno di sostituire
D con D + (h) (che non cambia `(D) e deg D) possiamo supporre D ≥ E. Ma
allora
`(D) ≤ `(m1 E) + deg D − deg E =
= m1 deg f + 1 − ga + deg D − deg E = deg D + 1 − ga
che insieme alla disuguaglianza precedente ci da la tesi.
2.3
Dualità di Serre
La disuguaglianza di Riemann è molto importante e basta già da solo a ottenere
parecchi risultati significativi, tuttavia l’informazione da essa portata può essere
molto raffinata. Il nostro scopo ora sarà di scoprire chi è il “termine mancante”
nella disuguaglianza di Riemann, cioè trovare una caratterizzazione di
`(D) − 1 − deg D + ga
e anche di trovare un legame tra ga e la topologia della superficie. Per fare
questo sarà necessario definire una generalizzazione delle funzioni meromorfe.
Sia X una superficie di Riemann compatta. Un adele è una collezione
f = {fp }p∈X di germi di funzioni meromorfe, uno per ogni punto di X, tali che
solo un numero finito abbia effettivamente un polo in p. Cioè ordp fp ≥ 0 per
tutti i p ∈ X tranne che per un numero finito. Per comodità indicheremo spesso
ordp (fp ) con ordp (f ) e fp (p) con f (p). Gli adele formano in modo naturale una
C-algebra con le operazioni
(f + g)p = fp + gp
(fp gp ) = fp gp
(λf )p = λfp
L’algebra di tutte le adele verrà indicata con A(X). C’è un’immersione naturale
della C-algebra M(X) in A(X), che consiste nel mandare una funzione meromorfa f nella collezione di tutti i germi di f in p. Quest’immersione dà a A(X)
una naturale struttura di M(X)-algebra.
In analogia con quanto già fatto per le funzioni meromorfe e gli spazi L(D),
definiamo per ogni divisore D lo spazio A(D) come
A(D) = {f ∈ A(X)\{0} | ordp (f ) + D(p) ≥ 0∀p ∈ X} ∪ {0}
cioè gli adele con i poli limitati da D. Come per gli spazi L(D) esiste un
isomorfismo naturale tra A(D) e A(D + (g)), dove g ∈ M(X), che manda
16
un’adele f in gf . Inoltre è chiaro che se f è una funzione meromorfa f ∈ A(D)
se e solo se f ∈ L(D).
Osserviamo che, nonostante per un adele non sia ben definito il divisore
associato, è comunque possibile definirne il divisore dei poli come
X
(f )∞ =
(− ordp (f )) · p
f (p)=∞
Infatti un adele può avere un numero arbitrario di zeri, ma solo un numero finito
di poli. Immediatamente si vede che f ∈ A((f )∞ ), per cui
[
A(X) =
A(D)
D
Sia ora ω ∈ Ω(X) una 1-forma meromorfa. Possiamo definire una mappa
C-lineare ϕω : A(X) → C come
X
ϕω (f ) =
Res(fp ω)
p∈X
Infatti esiste solo un numero finito di p tali che fp ω abbia un polo in p: i
poli di f e quelli di ω. In tutti gli altri punti la 1-forma è olomorfa per cui il
residuo è nullo. Si vede immediatamente che questa mappa è C-lineare. Una
domanda naturale da porsi è quali elementi di A(X)∗ siano di questa forma. Per
cominciare guardiamone il nucleo. Il teorema dei residui, intanto, ci garantisce
che se f ∈ M(X), ϕω (f ) è nullo. Inoltre supponiamo ω ∈ Ω(D). Allora se
f ∈ A(D), fp ω è un germe di 1-forma olomorfa. Infatti
ordp (f ω) = ordp (f ) + ordp (ω) ≥ −D(p) + D(p) = 0
Quindi ϕω (f ) = 0. Riassumendo abbiamo fatto vedere che se ω ∈ Ω(D), allora
ker ϕω ⊇ A(D) + M(X).
In virtù di quanto visto nel precedente paragrafo, possiamo definire il seguente spazio vettoriale su C
H 1 (D) = A(X)/(A(D) + M(X))
Abbiamo quindi una mappa ϕ : Ω(D) → H 1 (D)∗ , che manda ω in ϕω . È
immediato vedere che è lineare. Ma è possibile che ϕω si annulli su H 1 (D)
anche se ω 6∈ Ω(D)?1 Il seguente lemma risponde negativamente.
Lemma 2.3.1. Sia ω 1-forma meromorfa su X. Allora ω ∈ Ω(D) se e solo
se ϕω ∈ H 1 (D)∗ . In particolare ω = 0 se e solo se ϕω = 0, per cui la mappa
ϕ : Ω(D) → H 1 (D)∗ che manda ω in ϕω è iniettiva.
1 Identificheremo consistentemente lo spazio duale H 1 (D)∗ con lo spazio dei funzionali
C-lineari su A(X) che si annullano su A(D) + M(X).
17
Dimostrazione. Supponiamo che ω ∈ Ω(D), allora ϕω ∈ Ω0 (D) se e solo se
ϕω (A(D)) = 0. Ma se f ∈ A(D), allora la collezione di germi di 1-forme
{fp ω}p∈X è composta solo da germi di funzioni olomorfe, perchè
ordp (fp ω) = ordp (fp ) + ordp (ω) ≥ −D(p) + D(p) = 0
Quindi in particolare Resp (fp ω) = 0 per ogni p ∈ X, per cui ϕω (f ) = 0.
Supponiamo invece ω 6∈ Ω(D). Allora esiste q ∈ X tale che ordq (ω) <
D(q) − 1. Fissiamo z coordinata locale in q e consideriamo ora l’adele f tale che
(
z − ordq (ω) se p = q
fp =
0
altrimenti
Allora f ∈ A(D), perchè ordq fq = − ordq ω > 1 − D(q).
Studiamo ora un po’ meglio lo spazio H 1 (D). Indicheremo per motivi storici
la sua dimensione con i(D) e la chiameremo l’indice del divisore D. Un divisore
tale che i(D) > 0 è detto un divisore speciale.
Fissiamo D divisore e p ∈ X un punto. Fissiamo inoltre z coordinata locale
in p. Allora possiamo definire due mappe. Una è la mappa v : L(D + p) → C
usata nel lemma 2.1.1 e definita da
v(f ) = h(p)
se localmente f = z −D(p)−1 h. L’altra è r : C → H 1 (D) definita da
r(λ) = λ[g]
Inoltre indicheremo con p : H 1 (D) → H 1 (D + p) la proiezione al quoziente
indotta dall’inclusione A(D) ⊆ A(D + q).
Lemma 2.3.2. La successione
v
r
p
0 → L(D) → L(D + p) −
→C−
→ H 1 (D) −
→ H 1 (D + p) → 0
dove la prima freccia è l’inclusione di L(D) in L(D + p), è esatta. In particolare
i(D) < ∞ se e solo se i(D + p) < ∞ e inoltre
i(D) − 1 ≤ i(D + p) ≤ i(D)
e i(D) − 1 = i(D + p) se e solo se `(D) = `(D + p).
Dimostrazione. Gli unici punti in cui non è evidente che la successione sia esatta
sono L(D + p), C e H 1 (D). Inoltre la dimostrazione del lemma 2.1.1 ci dice
esattamente che la successione è esatta in L(D + p).
• Im v ⊃ ker r. Sia infatti λ ∈ ker r. Allora λg ∈ A(D) + M(X). Ma questo
vuol dire che esiste una f ∈ M(X) tale che f − λg ∈ A(D). Quindi per
cominciare f ∈ L(D + p), perchè per ogni q ∈ X, q 6= p
ordq (f ) = ordq (f − λgq ) ≥ −D(q)
18
Inoltre in p ordp (f ) = ordp (gp ) = −D(p) − 1, perchè altrimenti la loro differenza avrebbe un polo di ordine maggiore di D(p). Ma allora è evidente
che v(f ) = λ.
• Im v ⊂ ker r. Se λ = v(f ), allora λg −f ∈ A(D), cioè λg ∈ A(D)+M(X),
perciò r(λ) = [λg] = 0.
• Im r ⊃ ker p. Infatti se [f ] sta nel nucleo della proiezione, vuol dire che
f ∈ A(D + p) + M(X). A meno di cambiare il rappresentante possiamo
supporre che f ∈ A(D + p). Ora in coordinate locali possiamo scrivere
fp = λz −D(p)−1 + termini di ordine superiore
per cui f − λg ∈ A(D). Ma allora [f ] = [λg] = r(λ).
• Im r ⊂ ker p. Infatti g ∈ A(D + p), per cui pr(1) = 0, cioè pr = 0.
Lemma 2.3.3. Sia D divisore su X tale che `(D) = deg D + 1 − ga . Allora
H 1 (D) = 0.
Dimostrazione. Se `(D) = deg D +1−ga , allora per ogni punto q ≥ D sappiamo
dalla dimostrazione della disuguaglianza di Riemann che `(D + q) = deg(D +
q) + 1 − ga . In particolare `(D + q) = `(D) + 1 per cui, per il lemma precedente
i(D + q) = i(D). Iterando il procedimento si vede che per ogni divisore E ≥ D,
i(E) = i(D), perciò la naturale proiezione al quoziente H 1 (D) → H 1 (E) → 0
è iniettiva, cioè A(E) + M(X) = A(D) + M(X). Sia ora f ∈ A(X). Allora,
prendendo E = max((f )∞ , D), abbiamo che f ∈ A(E) ma A(E) ⊆ A(D) +
M(X). Perciò f ∈ A(D) + M(X), cioè A(X) = A(D) + M(X), ovverosia
H 1 (D) = 0.
Quindi in particolare i(D) < ∞ per ogni divisore D.
La prossima proposizione ci mostra come le costruzioni alquanto elaborate
che abbiamo fatto siano però utili, in quanto ci permettono di trovare il termine
mancante della disuguaglianza di Riemann.
Proposizione 2.3.4. Sia D divisore su una superficie di Riemann X. Allora
vale l’uguaglianza
`(D) − i(D) = deg D + 1 − ga
Dimostrazione. Sappiamo già che l’uguaglianza vale per deg D sufficientemente
grande. Dimostriamo ora che se la tesi vale per D, allora vale anche per D − p,
dove p è un qualunque punto di X. Infatti per il lemma 2.3.2
`(D − p) − i(D − p) = `(D) − i(D) − 1 = deg D − ga = deg(D − p) + 1 − ga
Quindi, sia D divisore qualsiasi e p punto di X. Per induzione sappiamo che
la tesi vale per D se e solo se vale D + np. Ma basta scegliere n tale che
deg D > N − n, dove N è come nell’enunciato della disuguaglianza di Riemann
perchè la tesi sia vera per D + np.
19
Definiamo Ω0 come l’unione di tutti gli H 1 (D)∗ , o meglio come l’insieme di
tutti quei funzionali su A(X) che si annullano su M(X) e su A(D) per qualche
divisore D. Allora abbiamo visto che ϕ(Ω(X)) ⊆ Ω0 . Vorremmo dimostrare
che ϕ è un isomorfismo. A priori Ω0 è dotato unicamente di una struttura di
C-spazio vettoriale, mentre Ω(X) ha una struttura più ricca: è un M(X)-spazio
vettoriale di dimensione 1 . È possibile però dotare Ω0 di una struttura di M(X)spazio vettoriale in modo che ϕ sia lineare, avvantaggiadoci cosı̀ attraverso la
maggiore struttura. Infatti è sufficiente notare che
ϕgω (f ) = ϕω (gf )
Quindi se η ∈ Ω0 e g ∈ M(X) possiamo porre
gη(f ) = η(gf ) ∀f ∈ A(X)
È un facile esercizio dimostare che se η ∈ H 1 (D)∗ , gη ∈ H 1 (D + (g))∗ e che
quest’operazione dà effettivamete a Ω0 una struttura di M(X)-spazio vettoriale.
Proposizione 2.3.5. Ω0 ha dimensione 1 su M(X).
Dimostrazione. Sappiamo che Ω0 non è zero, perchè ad esempio ci sta l’immagine di ϕ. Per completare la dimostrazione, dobbiamo mostrare che due elementi
η, ξ di Ω0 non sono linearmente indipendenti su M(X). Supponiamo per assurdo
che lo siano. Prendiamo E un divisore tale che η, ξ ∈ H 1 (D)∗ . Prendiamo D un
divisore arbitrario, e fissiamo h1 , . . . , hn base di L(D) (e quindi n = `(D)). Allora h1 η, . . . , hn η, h1 ξ, hn ξ sono linearmente indipendenti su C (una loro eventuale
relazione di dipendenza lineare darebbe una relazione di dipendenza lineare su
M(X) tra η e ξ). Ma tutte queste funzioni stanno in H 1 (E − D)∗ , per cui
i(E − D) ≥ 2`(D) ≥ 2(deg D + 1 − ga )
Ma dalla proposizione precendente
i(E − D) = `(E − D) − 1 + ga − deg(E − D)
Per cui
2 deg D + 1 − ga ≤ `(E − D) − 1 + ga − deg E + deg D
Cioè
deg D ≤ 2ga − 2 − deg E + `(E − D)
Ma questo è assurdo perchè per deg D molto grande `(E − D) = 0 e il resto del
membro di destra è costante.
Teorema 2.3.6 (Dualità di Serre). Sia X una superficie di Riemann compatta
e sia D un divisore. Allora la mappa ϕ : Ω(D) → H 1 (D)∗ che manda ω in ϕω
è un isomorfismo di spazi vettoriali.
Dimostrazione. Intanto osserviamo che la mappa ϕ : Ω(X) → Ω0 è M(X)lineare. Inoltre abbiamo visto che è iniettiva., per cui dev’essere un isomorfismo.
Allora se prendo η ∈ H 1 (D)∗ , esiste un ω ∈ Ω(X) tale che η = ϕω . Ma allora
per il lemma 2.3.1 risulta ω ∈ Ω(D), per cui la tesi è dimostrata.
20
2.4
Teorema di Riemann-Roch
Dalla dualità di Serre possiamo dedurre che i(D) = dim H 1 (D) = dim H 1 (D)∗ =
dim Ω(D) = `(K − D), per cui possiamo riscrivere la proposizione 2.3.4
`(D) − `(K − D) = deg D + 1 − ga
Ora valutando questa uguaglianza in D = 0 otteniamo
`(0) − `(K) = 0 + 1 − ga
Cioè, ricordando che `(0) = 1, `(K) = ga . Infine valutandola in D = K e
ricordando che deg K = 2g − 2 otteniamo
`(K) − `(0) = 2g − 2 + 1 − ga
cioè ga = g, come avevamo promesso. Perciò abbiamo finalmente dimostrato il
Teorema 2.4.1 (Riemann-Roch). Sia X una superficie di Riemann compatta,
D un divisore e K un qualsiasi divisore canonico. Allora vale
`(D) − `(K − D) = deg D + 1 − g
dove g è il genere topologico della superficie.
Dalla dimostrazione sono chiari i seguenti corollari:
Corollario 2.4.2. Sia K un qualsiasi divisore canonico. Allora `(K) = g. In
particolare la dimensione su C di Ω(0), lo spazio di tutte le 1-forme olomorfe,
è g.
Corollario 2.4.3. Sia D divisore tale che deg D ≥ 2g − 1. Allora `(D) =
deg(D) + 1 − g. Inoltre l’uguaglianza vale anche se deg D = 2g − 2 e D non è
un divisore canonico.
Il seguente teorema, che ci servirà per concludere il nostro studio della struttura algebrica di M(X), ci dice che il comportamento singolare di ogni adele
può essere “approssimato” da una funzione meromorfa in un numero finito di
punti.
Teorema 2.4.4. Sia f un adele e p1 , . . . , pn ∈ X punti distinti. Allora esiste
una funzione meromorfa f tale che fpi − fpi sia olomorfa per ogni i = 1, . . . , n.
In particolare, fissati degli interi mk per k = 1, . . . , n possiamo trovare una
funzione meromorfa f tale che ordpk f = mk .
Dimostrazione. Prendiamo q ∈ X distinto dai pi . Allora per n sufficientemente
grande H 1 (nq) = 0. Allora f ∈ A(nq) + M(X). Questo vuol dire che esiste
una funzione meromorfa f tale che f − f ∈ A(nq). Ma allora questa funzione f
verifica esattamente la tesi perchè
ordpi (f − f ) ≥ 0
per ogni i = 1, . . . , n.
21
Vediamo ora finalmente un risultato che chiude la nostra indagine delle
proprietà algebriche di M(X).
Corollario 2.4.5. Sia X una superficie di Riemann compatta e sia f una
funzione meromorfa mai nulla. Allora [M(X) : C(f )] = deg f .
Dimostrazione. Supponiamo che (f )∞ = n1 · p1 + · · · + nk · pk , con ns > 0. Per il
teorema precedente per ogni i = 1, . . . , k e j = 1, . . . , ni possiamo costruire una
funzione meromorfa gij tali che abbia un polo di ordine j in pi e sia olomorfa
in tutti gli altri ps . Il nostro claim è che queste siano linearmente indipendenti
su C(f ). Se lo fossero sarebbe
[M(X) : C(f )] ≥
k
X
ni = deg(f )∞ = deg(f )
i=1
Ma poichè già sappiamo che [M(X) : C(f )] ≤ deg f avremmo la tesi.
Supponiamo ora per assurdo che ci sia una relazione di dipendenza lineare
X
ci,j (f )gi,j = 0
i,j
A meno di fare denominatore comune possiamo supporre ci,j ∈ C[z]. Scegliamo
ci0 ,j0 di grado massimo tra tutti i ci,j e di j massimo tra quelli di grado massimo.
A meno di riordinare i pi possiamo supporre i0 = 1. Allora dividendo l’equazione
precedente per c1,j0 abbiamo
X ci,j (f )
gi,j = 0
c (f )
i,j 1,j0
Studiamo ora il comportamento locale dell’espressione al primo membro nel
punto p1 . Osserviamo che le funzioni sono sempre olomorfe in p1 perchè l’ordine
di polo di c1,j0 è maggiore o uguale dell’ordine di polo di ci,j per costruzione.
Quindi i termini gi,j con i 6= 1 sono olomorfi in p1 . Inoltre se deg c1,j0 > deg c1,j ,
c1,j (f )
allora la funzione c1,j
(f ) ha uno zero di ordine almeno n1 , mentre g1,j ha un
0
polo di ordine strettamente minore di n1 , per cui la funzione
c1,j (f )
g1,j
c1,j0 (f )
non ha poli in p1 . Inoltre il termine g1,j0 ha un polo di ordine esattamente j0
in p1 e abbiamo visto che tutti gli altri termini con j > j0 sono olomorfi. Per
cui il termine g1,j0 ha un polo di ordine strettamente maggiore che tutti gli altri
termini, ma questo è assurdo perchè dovrebbe venire cancellato.
22
Capitolo 3
Mappe olomorfe negli spazi
proiettivi
Vogliamo considerare alcune proprietà più “geometriche” delle superfici di Riemann. Siamo interessati a studiare le mappe1
ϕ : X → Pn .
Vedremo che le proprietà di queste mappe si possono analizzare tramite degli
oggetti che è possibile costruire su X tramite le sole funzioni meromorfe, i sistemi
lineari di divisori.
3.1
Sistemi lineari
Sia D un divisore. Consideriamo
|D| = {E ≥ 0 | E ∼ D}
cioè l’insieme di tutti i divisori effettivi linearmente equivalenti a D. Questo
viene detto sistema lineare completo associato a D. L’importanza dei sistemi
lineari viene dal fatto che su di essi è possibile mettere una struttura di spazio
proiettivo. Infatti si consideri la mappa
S : PL(D) → |D|
data da S[f ] = D + (f ). Questa è ben definita perchè (λf ) = (f ). Inoltre è
surgettiva, perchè se E ∼ D, allora E − D = (f ) e inoltre è ovvio che f ∈ L(D)
perchè E ≥ 0. Infine è iniettiva perchè se S[f ] = S[g], ne segue immediatamente
che (f ) = (g), cioè (f /g) = 0. Ma una funzione ha divisore zero se e solo se è
costante, perciò f = λg, cioè [f ] = [g].
1 In
questa tesi indicheremo sempre con Pn lo spazio proiettivo complesso n-dimensionale.
23
Osserviamo che questa struttura di spazio proiettivo non dipende dal particolare divisore D scelto. Cioè, se E ∼ D sono due divisori linearmente equivalenti,
l’isomorfismo naturale tra L(D) e L(E) è compatibile con la struttura di spazio
proiettivo.
Un sottospazio proiettivo D di un sistema lineare completo |D| è detto sistema lineare. Vedremo presto che i sistemi lineari “rappresentano” l’insieme
delle intersezioni con degli iperpiani se la superficie di Riemann viene immersa
in qualche modo in uno spazio proiettivo.
Supponiamo di avere un qualunque sistema lineare D di dimensione r. Può
essere comodo talvolta essere in grado di lavorare in coordinate. Prendiamo ora
un qualunque divisore D ∈ D e sia V il sottospazio vettoriale di L(D) tale che
nell’identificazione precedente PV = D. Fissiamo f0 , . . . , fr base di V . Allora
possiamo porre coordinate [λ0 , . . . , λr ] su D tali che
[λ0 , . . . , λn ] = D + (λ0 f0 + · · · + λr fr )
Se D è un sistema lineare e E un divisore effettivo, indichiamo con DE =
{D ∈ D | D ≥ E}.
Lemma 3.1.1. DE è un sottospazio proiettivo di D, e perciò è ancora un
sistema lineare.
Dimostrazione. Fissiamo D ∈ D e sia V sottospazio di L(D) tale che PV = D.
Poichè E è un divisore effettivo, L(D − E) ⊆ L(D). Allora se prendiamo W =
L(D − E) ∩ V , vogliamo dimostrare che DE = PW . Infatti, posto D0 = D + (f )
un qualunque elemento di D, D0 ∈ DE se e solo se (f )+D ≥ E, che è equivalente
a f ∈ L(D − E). Ma questo è proprio quello che volevamo dimostrare.
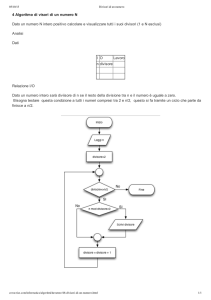
p1
ϕ(X)
p2 H
p3
ϕ (H) = p1 + p2 + p3
∗
Figura 3.1: Costruzione del divisore dell’iperpiano H
3.2
Mappe negli spazi proiettive
Sia ϕ : X → Pn una mappa olomorfa con immagine non contenuta in nessun
iperpiano (possiamo sempre chiederlo, a meno di far scendere n), e sia H un
iperpiano di Pn . Vorremmo associare un divisore ϕ∗ (H) ad H, che rappresenti i
punti d’intersezione contati con molteplicità. La tecnica per farlo è la seguente.
24
Fissiamo un punto p ∈ X, e sia L un altro iperpiano non passante per ϕ(p).
Allora consideriamo la funzione
f (q) =
H(ϕ(q))
L(ϕ(q))
Questa è olomorfa in un intorno di p e ha uno zero in p se e solo se H passa per
ϕ(p). Definiamo l’ordine di ϕ∗ (H) in p come l’ordine di zero di f
H
ϕ∗ (H)(p) =
◦ ϕ (p)
L
Si vede immediatamente che questa definizione è ben posta e non dipende dall’iperpiano L. Inoltre è evidente che i p in cui ϕ∗ (H)(p) 6= 0 sono un discreto,
e perciò ϕ∗ (H) è proprio un divisore ben definito. Consideriamo la famiglia
|ϕ| = {ϕ∗ (H) | H ∈ Pn∗ }
costituita da tutti i divisori di iperpiani.
Proposizione 3.2.1. |ϕ| è un sistema lineare di dimensione n e ϕ∗ : Pn∗ → |ϕ|
è un isomorfismo di spazi proiettivi.
Dimostrazione. Fissiamo un qualunque iperpiano H0 e poniamo D = ϕ∗ (H0 ).
Allora dalla definizione segue immediatamente per ogni altro divisore H l’uguaglianza
H
ϕ∗ (H) = D +
◦ϕ
H0
Ma notiamo che la famiglia di funzioni
H(ϕ)
| H iperpiano ∪ {0}
V =
H0 (ϕ)
è un sottospazio vettoriale di L(D) di dimensione n + 1. Allora l’isomorfismo
canonico tra |D| e PL(D) ristretto a PV è proprio ϕ∗ , e questa è esattamente
la tesi.
Una domanda naturale da porsi è se tutti i sistemi lineari nascano in questa
maniera. Questo non è vero, infatti |ϕ| ha un’importante caratteristica, è privo
di punti fissi. Questo non è altro che un modo complicato per dire che dato
un qualunque punto c’è un iperpiano che non ci passa. Un sistema lineare D
si dice privo di punti fissi se per ogni p ∈ X esiste D ∈ D tale che D(p) = 0.
Questo si vede immediatamente, infatti è sufficiente prendere H iperpiano che
non passi per ϕ(p), la costruzione stessa ci dà ϕ∗ (H)(p) = 0.
Lemma 3.2.2. D è privo di punti fissi se e solo se Dp 6= D per ogni p, ovverosia
se dim Dp = dim D − 1 per ogni p ∈ X.
25
Dimostrazione. La tesi è ovvia dal fatto che se E è un divisore effettivo e p ∈ X
E(p) > 0 ⇔ E ≥ p
Per fortuna questa condizione, oltre a essere necessaria è anche sufficiente,
vale cioè
Teorema 3.2.3. La mappa che manda una mappa olomorfa ϕ : X → Pn in |ϕ|
realizza una corrispondenza biunivoca tra le mappe olomorfe con immagine non
degenere a meno di cambi di coordinate in arrivo e i sistemi lineari di divisori
su X di dimensione n privi di punti fissi.
Dimostrazione. La mappa ϕ → |ϕ| è chiaramente indipendente dalle coordinate in arrivo, perciò per costruire l’inversa possiamo tranquillamente usare una
mappa a valori in un qualunque spazio proiettivo di dimensione n. Prendiamo
ora un qualunque sistema lineare privo di punti fissi D. Ricordando che D è
proprio uno spazio proiettivo di dimensione n possiamo costruire una
ϕD : X → D ∗
che manda ϕD (p) = Dp . Nella formula precedente con D ∗ si intende lo spazio
proiettivo duale (identificato con l’insieme di tutti gli iperpiani). Questa è ben
definita, perchè per ipotesi Dp è un iperpiano di D per ogni p. Fissiamo p ∈ X
e vediamo che è olomorfa in p. Prendiamo D ∈ D tale che D(p) = 0. Siano
f0 , . . . , fn ∈ L(D) base di V dove PV = D. Allora possiamo mettere su D
coordinate omogenee [λ0 , . . . , λn ] tali che per ogni E ∈ D possiamo scrivere
E = D + (λ0 f0 + · · · + λn fn )
Poichè D(q) = 0 in un intorno di p, abbiamo che E(q) > 0 se e solo se]
(λ0 f0 + · · · + λn fn )(q) > 0
e, poichè le fi sono olomorfe in p, E(q) > 0 se e solo se
λ0 f0 (q) + · · · + λn fn (q) = 0
Quindi, nelle coordinate duali delle λi , la mappa ϕD si può scrivere in un intorno
di p come
ϕD (q) = [f0 (q), . . . , fn (q)]
ed è perciò olomorfa in p.
Si tratta ora di far vedere che le costruzioni ϕ → |ϕ| e D → ϕD sono l’una
l’inversa dell’altra. Per maggior chiarezza lo divideremo in due lemmi
Lemma 3.2.4. |ϕD | = D.
26
Fissiamo un iperpiano di D ∗ che è, com’è noto, della forma
SE = {H ∈ D ∗ | H 3 E}
per qualche E ∈ D. Fissiamo inoltre p ∈ X e calcoliamo ϕ∗D (SE )(p). La nostra
tesi è che ϕ∗D (SE )(p) = E(p).
Prendiamo D ∈ D tale che D(p) = 0. Fissiamo ora f0 , . . . , fn che inducano
un sistema di coordinate in D come in 3.1 tale che
[λ0 , . . . , λn ] = D + (λ0 f0 + · · · + λn fn )
Inoltre poichè D è effettivo possiamo supporre che f0 = 1. Siano [µ0 , . . . , µn ] le
coordinate di E in questa base. Allora, nelle coordinate duali
SE = {[a0 , . . . , an ] ∈ D ∗ | a0 µ0 + · · · + an µn = 0}
E analogamente
SD = {[a0 , . . . , an ] ∈ D ∗ | a0 = 0}
Perciò
SE (ϕ)
(p) =
SD (ϕ)
λ0 + λ1 f1 + · · · + λn fn
(p) = E(p) − D(p) = E(p)
=
1
ϕ∗D (SE )(p) =
che, finalmente!, è la nostra tesi.
Lemma 3.2.5. Presa ψ : X → Pn esiste una scelta di coordinate di |ψ|∗ per
cui ϕ|ψ| = ψ.
Sia H0 = {x0 = 0} l’iperpiano all’infinito di Pn . Poniamo h1 , . . . , hn funzioni
meromorfe su Pn definite da
xj
hj (x) =
x0
Poste quindi fj = hj ◦ ψ, abbiamo che su U0 = ψ −1 (Pn \H0 ) le fj sono olomorfe
e vale
ψ(p) = [1, f1 (p), . . . , fn (p)]
Allora se H1 = {a0 x0 + · · · + an xn = 0} è un altro iperpiano di Pn
a0 x0 + · · · + an xn
◦ψ =
ψ ∗ (H1 ) − ψ ∗ (H0 ) =
x0
= (a0 + a1 h1 + · · · + an hn ◦ ψ) = (a0 + a1 f1 + . . . an fn )
Quindi le funzioni 1, f1 , . . . , fn sono elementi di L(ψ ∗ H0 ) che inducono proprio
le coordinate volute su |ψ|.
Lemma 3.2.6. Un punto p ∈ X è critico per ϕD se e solo se D2p = Dp .
27
Dimostrazione. Prendiamo D ∈ D tale che D(p) = 0 e scegliamo f0 , . . . , fn che
inducono coordinate su D date da
[λ0 , . . . , λn ] = D + (λ0 f0 + · · · + λn fn )
Osserviamo che poichè D ≥ 0 possiamo prendere f0 = 1 e f1 (p) = · · · = fn (p) =
0. Allora le funzioni 1, f1 , . . . , fn sono olomorfe in un intorno di p ed esiste una
carta affine in cui
ϕD (q) = (f1 (q), . . . , fn (q))
Allora p è singolare se e solo se df1 (p) = · · · = dfn (p) = 0. Ma questo equivale
a (f1 )(p), . . . , (fn )(p) ≥ 2.
D’altro canto sappiamo che Dp è dato in quelle coordinate da λ0 = 0. Ma
allora se E ∈ Dp
E(p) = D(p) + (λ1 f1 + · · · + λn fn )(p) ≥ inf((f1 ), . . . , (fn ))(p) ≥ 2
e questa è proprio la tesi.
Un sistema lineare è molto ampio se la mappa ϕD è un immersione. Con
immersione indichiamo una mappa ψ : X → Y tra due varietà complesse
compatte che sia iniettiva e tale che il differenziale sia iniettivo in ogni punto.
Osserviamo che la compattezza delle varietà ci garantisce automaticamente che
sia un omeomorfismo sull’immagine.
Teorema 3.2.7. D è molto ampio se e solo se dim Dp+q = dim D − 2 per ogni
p, q ∈ X.
Dimostrazione. Poichè X è compatta sappiamo che ϕD è un embedding se e
solo se è un’immersione iniettiva. Ma dal lemma 3.2.6, sappiamo che ϕ è
un’immersione se e solo D2p è diverso da Dp per ogni p ∈ X, cioè se e solo
se dim D2p = dim D − 2.
Consideriamo l’iniettività. Siano p, q ∈ X punti distinti. Dato che ϕD (p) =
Dp per definizione, è evidente che ϕD (p) = ϕD (q) se e solo se Dp = Dq . Ma
allora Dp+q = Dp , e perciò
dim Dp+q = dim Dp = dim D − 1
Quindi la tesi è dimostrata.
D’ora in poi tutte le mappe ϕ : X → Pn saranno supposte olomorfe con
immagine non contenuta in nessun iperpiano.
3.3
Mappa canonica
Cominciamo ora a studiare il più importante sistema lineare di una superficie
di Riemann: il sistema canonico K. Questo è costituito da tutti i divisori delle
1-forme olomorfe e dal teorema di Riemann-Roch sappiamo che ha dimensione
28
`(K) − 1 = g − 1. La prima domanda da chiedersi è quali siano i suoi punti
fissi. Dal criterio precedente possiamo dire che p è un punto fisso se e solo se
dim Kp = dim K, cioè se e solo se
`(K − p) = `(K) = g
Ma da Riemann-Roch `(K − p) = `(p) + 1 − g + deg(K − p) = `(p) + g − 2.
Ora, poichè `(0) = 1, sappiamo che `(p) è 1 o 2. In quali casi è 2? Se `(p) = 2
vuol dire che c’è una funzione meromorfa f : X → P1 non costante che ha solo
un polo semplice in p. Ma allora f è una mappa olomorfa di grado 1 tra X e
P1 , per cui è un biolomorfismo. Quindi K ha punti fissi solo nel caso in cui la
superficie sia la sfera di Riemann. Inoltre osserviamo anche che se g = 0 questo
deve necessariamente succedere, perchè
`(K − p) ≥ 0 ⇒ `(p) − 2 ≥ 0 ⇒ `(p) ≥ 2
Perciò in una superficie di Riemann di genere g > 0 possiamo considerare
la mappa canonica ϕK : X → Pg−1 , che è la mappa associata al sistema
canonico.
Cerchiamo ora di capire quand’è che la mappa canonica è un’immersione.
Grazie alla teoria sviluppata nella sezione precedente sappiamo che la condizione
è `(K − p − q) = g − 2. Operando con Riemann-Roch come prima otteniamo
che la condizione è `(p + q) = 1. Perciò il sistema canonico non è molto ampio
se e solo se esiste una funzione meromorfa f : X → P1 di grado 2. Le superfici
per cui ciò accade sono dette curve iperellittiche e su di esse vi è una teoria
ricca e approfondita. In particolare si può vedere, usando un minimo di teoria
dei rivestimenti, che sono classificate dalle g-uple di punti di P1 a meno di
biolomorfismo. Usando la disuguaglianza `(K − p − q) ≥ 0 possiamo verificare
che le superfici di genere 1 sono tutte iperellittiche. Per quanto riguarda le
superfici di genere 2, sono tutte iperellittiche anche quelle. Infatti se prendiamo
K divisore del sistema canonico, questo ha grado 2g − 2 = 2, per cui è della
forma K = p + q. Inoltre è noto che `(K) = g = 2, per cui anche in questo caso
X è una curva iperellittica.
Riassumendo i risultati che abbiamo ottenuto finora, possiamo enunciare
Proposizione 3.3.1. Sia X una superficie di Riemann e g il suo genere.
• Se g = 0, allora X è biolomorfa alla sfera di Riemann
• Se g > 0, il sistema canonico è privo di punti fissi e ha senso considerare
la mappa canonica ϕK
• Se g = 1 o 2, allora X è iperellittica
• Se g ≥ 3 e X non è iperellittica, allora il sistema canonico è molto ampio
e ϕK è un embedding.
29
Capitolo 4
Curve algebriche e
analitiche
In questo capitolo vogliamo approfondire lo studio del legame tra superfici di
Riemann compatte e curve algebriche. Per curva algebrica intenderemo un
chiuso di Zariski irriducibile in Pn . Se n = 2 diremo che la curva è piana. È
facilmente noto dal teorema della funzione implicita che se una curva algebrica
è liscia è una sottovarietà olomorfa di Pn e perciò porta in modo naturale una
struttura di superficie di Riemann. Il nostro scopo sarà approfondire questo
legame nel caso delle curve piane.
4.1
Curve analitiche
Vogliamo trovare un modo di considerare delle “singolarità” in una superficie
di Riemann. A questo scopo definiamo una curva analitica come una mappa
olomorfa ϕ : X → Pn da una superficie di Riemann compatta allo spazio proiettivo che sia genericamente iniettiva, tale cioè che ci sia al più un numero
finito di punti di Pn con più di una controimmagine.
Tutte le sottovarietà complesse lisce di dimensione 1 di Pn sono curve analitiche, con come mappa naturale l’immersione, ma vediamo ora un esempio di una
curva analitica con qualche singolarità. Consideriamo la mappa ϕ : P1 → P2
definita da
ϕ(z) = [1, z 2 , z 3 ]
con l’ovvia estensione ϕ(∞) = [0, 0, 1]. Questa è una curva analitica (è addirittura biunivoca!) ma non è una sottovarietà liscia di P2 : infatti la mappa ϕ
è singolare in 0, come si può immediatamente verificare. Osserviamo però che
l’immagine di ϕ è la cubica cuspidata {y 2 = x3 }, e quindi una curva algebrica,
anche se singolare. Questo non è un caso, come vedremo in seguito.
Da adesso in poi supponiamo che la curva analitica ϕ sia non degenere,
tale cioè che ϕ(X) non sia contenuta in nessun iperpiano. Possiamo sempre
30
ricondurci a questo caso, a patto di diminuire la dimensione dello spazio di
arrivo. Chiamiamo grado di una curva analitica, il grado di un suo qualsiasi
divisore ϕ∗ (H) di iperpiani.
Questo ci suggerisce che essere tangente a una curva analitica sia una condizione molto speciale per un iperpiano. Questa cosa viene formalizzata nel
ϕ
seguente risultato. Sia X −
→ Pn una curva analitica. Diciamo che un punto
p ∈ X è regolare per ϕ se dϕp 6= 0 e inoltre ϕ−1 ϕ(p) = {p}. Diciamo che un
punto di Pn è un valore singolare se è punto di ϕ(X) che non sia immagine
di un punto regolare.
ϕ
Diciamo che un iperpiano H è tangente a una curva algebrica X −
→ Pn
in un punto p ∈ X se ϕ∗ (H)(p) ≥ 2, e trasversale se ϕ∗ (H)(p) = 1. Inoltre
diciamo che è trasversale alla curva se non è tangente in nessun punto (e
perciò è trasversale in tutti i punti di intersezione). Questa terminologia ha un
significato geometrico che viene indicato dal seguente lemma.
Lemma 4.1.1. Sia ϕ : X → Pn una curva analitica, p ∈ X un punto in cui ϕ
è regolare e H un iperpiano. Allora H è tangente a ϕ in p se e solo se contiene
la retta tangente a ϕ(X) in p (cioè l’immagine di dϕp ).
Dimostrazione. Prendiamo coordinate locali affini (z1 , . . . , zn ) in cui H sia determinato dall’equazione
a1 z1 + . . . an zn = 0
e in cui la mappa ϕ si scriva
ϕ(q) = (f1 (q), . . . , fn (q))
per f1 , . . . , fn olomorfe in un intorno di p. Senza perdita di generalità supponiamo che il punto p abbia coordinate (0, . . . , 0). Allora l’iperpiano {z1 = 1}
non passa per p. Per definizione il valore di ϕ∗ (H)(p) è dato dall’ordine di zero
della funzione
a1 f1 + · · · + an fn
f1 − 1
in p. Questo è maggiore o uguale a 2 se e solo se la derivata prima di questa
funzione si annulla in p, cioè se e solo se
(a1 f10 (p) + · · · + an fn0 (p))(f1 (p) − 1) + (a1 f1 (p) + · · · + an fn (p))f10 (p)
=
(f1 (p) − 1)2
= −(a1 f10 (p) + an fn0 (p)) = 0
ma questa è esattamente la condizione per cui la retta tangente in p (che è lo
span del vettore (f10 (p), . . . , fn0 (p))) giaccia nell’iperpiano H.
ϕ
Lemma 4.1.2. Sia X −
→ Pn una curva analitica e p0 ∈ Pn che non sia immagine di un punto singolare. Allora gli iperpiani traversali sono densi negli
iperpiani passanti per p0 .
31
In termini più intuitivi il teorema può essere enunciato come “Per ogni punto
non singolare p0 l’iperpiano generico per p0 è trasversale a X”.
Dimostrazione. Consideriamo dapprima il caso p0 6∈ ϕ(X). Prendiamo un iperpiano H passante per p0 e troviamone uno trasversale vicino a lui. Sia H1 un
qualsiasi altro iperpiano per p0 e consideriamo il sistema lineare
D = {(λH + µH1 ) | [λ, µ] ∈ P1 }
dei divisori di tutti gli iperpiani del fascio per H e H1 . Questo è evidentemente
privo di punti base, per cui induce una mappa ϕD : X → P1 . Ora è chiaro
che questa mappa induce una corrispondenza biunivoca tra i punti di P1 e i
divisori di D che manda z in ϕ∗D (z). Inoltre è chiaro che gli iperpiani trasversali
corrispondono esattamente ai punti non di ramificazione di ϕD , perciò è possibile
trovarne vicini a piacere a H.
Se p0 = ϕ(q0 ) è un valore regolare, allora tutta la costruzione precedente si
applica a patto di considerare il sistema lineare D − q0 = {D − q0 | D ∈ D}
(dato che per costruzione q0 è un punto fisso di D). Questo è privo di punti fissi
esattamente per il lemma 3.2.6
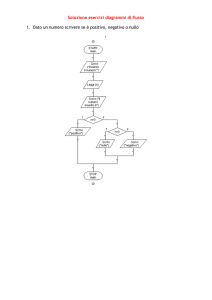
La costruzione nella dimostrazione precedente può essere intesa in senso
molto più geometrico. Infatti, andando a vedere le definizioni delle costruzioni,
vediamo che la mappa ϕD non fa altro che associare ad ogni punto p ∈ ϕ(X)
l’iperpiano del fascio che passa per p0 e p. Ma questo è lo stesso che associargli
la retta per p e p0 , per cui ϕD può essere reinterpretata come la proiezione di
centro p0 .
Pn
p0
ϕ(X)
p
ϕD (p)
P1
Figura 4.1: La mappa ϕD è ottenuta proiettando da p0 su un qualunque
iperpiano P1 ⊆ Pn .
Il nostro scopo attuale è dimostrare che l’immagine di ogni curva analitica
piana è una curva algebrica. Per fare questo abbiamo bisogno di una stima sulle
famiglie di polinomi che si annullano su ϕ(X).
Per comodità di notazione chiameremo C(n, r) l’insieme dei polinomi F ∈
C[x0 , . . . , xn ] omogenei di grado r. Indichiamo inoltre con Ir (X) come lo spazio
vettoriale dei polinomi in C(n, r) che si annullano su ϕ(X).
32
Lemma 4.1.3. Per ogni r > 0 vale la seguente stima
n+k
dim Ir (X) ≥
− rd − 1 + g
k
Dimostrazione. Fissiamo H0 un qualunque iperpiano, e consideriamo per ogni
r > 0 la mappa Rr : C(n, r) → L(rH0 ) definita da
F Rr (F ) = r H0 X
Osserviamo che il nucleo di Rr è costituito esattamente da Ir (X). Per stimarne
la dimensione, osserviamo che vale l’uguaglianza
r+n
dim ker Rr + dim Im Rr = dim C(n, r) =
n
Ma Im Rr ⊆ L(rH0 ) e quindi
dim Im Rr ≤ `(rH0 ) = rd + 1 − g + `(K − rH0 )
Supponendo ora che r sia sufficientemente grande (basta r > 2(g − 1)) possiamo
supporre deg(K − rH0 ) < 0 e quindi concludere che
n+k
dim ker Rr ≥
− rd − 1 + g
k
che è proprio la nostra tesi.
Siamo quindi pronti per dimostrare il nostro teorema
Teorema 4.1.4. Sia ϕ : X → P2 una curva analitica piana. Allora ϕ(X) è una
curva algebrica di grado d. Inoltre se p è un punto regolare di ϕ, allora ϕ(X) è
liscia in ϕ(p).
Dimostrazione. Dal lemma 4.1.3 sappiamo che se r è sufficientemente grande
dim ker Rr > 0.
Consideriamo F di grado minimo tra quelli che si annullano su X e sia
k = deg F . La prima osservazione è che k ≥ d. Infatti, preso p0 6∈ X, possiamo
trovare un iperpiano passante per p0 che interseca ϕ(X) in d punti distinti.
Questo perchè l’insieme degli iperpiani passanti per i punti su cui ϕ non è
iniettiva è un chiuso nel fascio passante per p0 , e perciò ci sarà un iperpiano
trasversale nel complementare. Poichè in realtà ne abbiamo una famiglia densa,
possiamo sceglierlo anche che non divide F . Ma allora abbiamo un iperpiano
che non divide F che lo interseca in d punti distinti, perciò deg F ≥ d.
Facciamo vedere che ogni polinomio G che si annulla su ϕ(X) è multiplo di F .
Infatti se fosse coprimo con F un risultato di algebra commutativa1 ci garantisce
1 È immediato dall’osservazione che il risultante di F e G sta nell’ideale (F, G) INSERIRE
RIFERIMENTO
33
che il loro comune luogo di zeri è un insieme finito di punti, cosa evidentemente
impossibile. Sia quindi F0 il loro fattore comune di grado massimo. Poichè
deg F0 > 1, abbiamo che il luogo di zeri di F/F0 non può essere tutta X, e
quindi dev’essere un numero finito di punti. Ma allora F0 deve annullarsi su
tutto X, per cui F0 = F per la minimalità di deg F .
Poichè ogni polinomio omogeneo di grado h che si annulla su X è multiplo
di F abbiamo un isomorfismo tra ker Rh e C(n, h − k), per cui
h−k+2
dim ker Rh =
2
Ma dal lemma 4.1.3 abbiamo, per h sufficientemente grande, la disuguaglianza
h−k+2
h+2
≥
− hd − 1 + g
2
2
Che, semplificandola, diventa
2(d − k)h ≥ 1 + g − (k − 1)(k − 2)
Ora è evidente che tale disuguaglianza può valere per h arbitrariamente grandi
se e solo se d ≥ k. Ma d’altro canto abbiamo visto che deve anche essere d ≤ k,
e perciò d = k.
Dimostriamo ora che {F = 0} coincide con ϕ(X). Abbiamo visto che lo contiente. Supponiamo per assurdo p0 ∈ {F = 0}\X. Allora, per il ragionamento
precedente possiamo trovare un iperpiano passante per p0 , che non divide F e
che interseca X in d punti distinti. Ma questo è assurdo, perchè intersecherebbe
{F = 0} in almeno d + 1 punti distinti, mentre F ha grado d.
Per dimostrare che ϕ(X) è irriducibile di dimensione 1 osserviamo che ogni
polinomio che non si annulla su ϕ(X) si annulla solo su un numero finito di punti
(per cui gli unici chiusi di Zariski propri contenuti in ϕ(X) sono gli insiemi finiti
di punti, da cui facilmente la tesi).
Infine, sia p valore regolare per ϕ. Allora prendiamo H iperpiano trasversale
a X che passa per p. Senza perdita di generalità (sono una famiglia densa)
posso prenderlo in modo che non passi per nessuno dei punti su cui ϕ non è
iniettiva. Di conseguenza questo interseca ϕ(X) in d punti distinti, e perciò non
può essere tangente. Poichè ha un iperpiano non tangente in p, ϕ(X) è liscia in
p.
Applicando il teorema a un’immersione si ha immediatamente il seguente
corollario:
Corollario 4.1.5. Sia X una sottovarietà liscia di dimensione 1 di P2 . Allora
X è una curva algebrica liscia.
Da cui le seguenti conclusioni
Corollario 4.1.6. Ogni superficie di Riemann di genere 1 è biolomorfa a una
cubica liscia di P2
34
Dimostrazione. Sia p0 ∈ X e consideriamo il divisore 3p0 . Per il teorema di
Riemann-Roch, per ogni p, q ∈ X
`(3 · p0 ) = 3 + 1 − 1 + `(K − 3 · p0 ) = 3
`(3 · p0 − p − q) = 1 + 1 − 1 + `(K − 3 · p0 + p + q) = 1
per questioni di grado. Ma allora |3 · p0 | è un sistema lineare completo molto
ampio di dimensione 2, perciò X si immerge in P2 e per il teorema precedente
è una cubica liscia.
Corollario 4.1.7. Ogni superficie di Riemann di genere 3 non iperellittica è
biolomorfa a una curva algebrica liscia di P2 di grado 4.
Dimostrazione. Il sistema canonico di una superficie di genere 3 non iperellittica
è, come abbiamo visto, un sistema lineare completo molto ampio di dimensione
2. Quindi X per il teorema precedente si immerge come una curva algebrica
liscia di grado 2g − 2 = 4.
4.2
Curve algebriche
In questa sezione cercheremo di mostrare il risultato complementare al precedente, mostrando che ogni curva algebrica discende da una curva analitica.
Sia C ⊆ Pn una curva algebrica. Allora una normalizzazione di C è una
ϕ
curva analitica X −
→ Pn tale che ϕ(X) = C.
ϕ
Proposizione 4.2.1. Sia X −
→ C una normalizzazione di C. Allora per ogni
superficie di Riemann compatta Y e per ogni mappa olomorfa ψ : Y → Pn
tale che ψ(Y ) ⊆ C esiste un unica ψ̃ : Y → X olomorfa tale che il seguente
diagramma commuti
ϕ
C ⊆ Pn
X
ψ̃
Y
ψ
Dimostrazione. Sia ∆ ⊂ X un insieme finito tale che ϕ sia un biolomorfismo con
l’immagine se ristretta al complementare U di ∆, e sia V ⊆ Y il complementare
di ψ −1 ϕ(∆). Allora su V la funzione ψ̃ è univocamente determinata e vale
ψ̃|V = (ϕ|U )−1 ◦ ψ|V
si tratta di vedere se sia possibile estenderla. Prendiamo q ∈ ∆, e prendiamo un
disco chiuso D che contiene q che sia sufficientemente piccolo in modo che D ∩ U
sia tutto il disco meno il punto q e che non contenga punti di ramificazione di ψ̃
(che sono in numero finito perchè la mappa è propria, in quanto composizione di
mappe proprie). Allora ψ̃ ristretta alla controimmagine di U è un rivestimento
35
di grado finito, e perciò ψ̃ −1 D è un numero finito di dischi bucati. Ciascuno
di questi dischi deve avere nella propria chiusura in Y un punto che non sta in
V (perchè questi dischi sono chiusi in U ) e perciò la funzione ψ̃ in un intorno
di questi punti è limitata, e perciò si può estendere. Ora se indichiamo con Ṽ
il dominio dell’estensione, questo è compatto. Infatti è l’unione di un numero
finito di dischi chiusi (che sono compatti) e della controimmagine di X meno la
parte interna dei dischi (che è compatta perchè controimmagine secondo ψ̃ che
è propria di un chiuso in X che è compatta). Ma Ṽ è Y meno un numero finito
di punti, e perciò può essere compatto se e solo se è tutto Y . Quindi abbiamo
l’estensione voluta, che è unica perchè è determinata univocamente su V che è
denso in Y .
Dal fatto che soddisfi una proprietà universale, è immediato che la normalizzazione, se esiste, è unica. Fortunatamente la sua costruzione è abbastanza
semplice anche se un po’ laboriosa, come si vede dal prossimo teorema.
Teorema 4.2.2. Per ogni curva algebrica piana C ⊆ P2 esiste una normalizϕ
zazione X −
→ C.
Dimostrazione. Prendiamo p0 punto di P2 non contenuto in C. Allora, fissata
una qualunque retta in P2 , la proiezione da L ci da’ una mappa π : C → P1 .
Siano p1 , . . . , pk i punti singolari di C e poniamo
Z = C\
k
[
π −1 π{pi }
i=1
cioè togliamo a C tutti i punti singolari e tutti i punti che vengono mandati
nello stesso punto di uno singolare da π. Allora Z è una varietà complessa di
dimensione 1 e π|Z è una mappa olomorfa e propria. Inoltre π(Z) è costituita
da tutto P1 meno un numero finito di punti (le immagini dei pi ). Siano questi
punti q1 , . . . , qn .
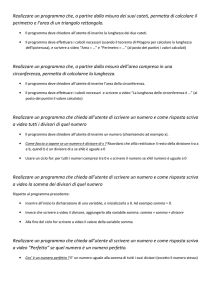
Attorno a ciascuno di questi possiamo prendere un disco Di che non contenga
nessun punto di ramificazione (poichè la mappa è propria sono in numero finito).
Inoltre supponiamo che Di non contenga nessun altro qj . Indichiamo con Di∗ ,
π
il disco Di meno il punto qi . Allora la restrizione a π −1 Di∗ −
→ Di∗ è, com’è
∗
noto, un rivestimento olomorfo di Di . Inoltre, poichè la mappa è propria, è un
rivestimento a grado finito. Quindi π −1 Di∗ è costituito dall’unione disgiunta di
un numero finito di dischi bucati
0
Di,1
0
Di,2
0
Di,n
i
Di
π
qi
Figura 4.2: La mappa π è un rivestimento in un intorno di qi
36
0
0
π −1 Di∗ = Di,1
t · · · t Di,m
i
in modo che la restrizione di π a ciascuno di essi sia una mappa del tipo π(z) =
0
z s . Allora è possibile incollare a ciascun Di,j
un dischetto chiuso in modo che lo
spazio topologico cosı̀ ottenuto sia ancora una superficie di Riemann (in sostanza
0
stiamo “tappando i buchi” dei Di,j
). L’unico punto delicato della costruzione
è la proprietà di Hausdorff, ma questa viene garantita dal fatto che l’insieme
0
. Inoltre Z è compatta, perchè è l’unione dei
{0 < |z| ≤ 1/3} è chiuso in ogni Di,j
dischetti chiusi che stiamo incollando (che sono un numero finito di compatti)
0
e del complementare di tutti i Di,j
(che è chiuso in Pn e perciò compatto).
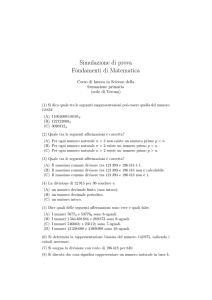
0
Di,t
ri
Figura 4.3: La mappa ϕ ha immagine limitata nell’intorno di ogni punto dove
non è definita
Vediamo ora di costruire la mappa ϕ : X → C. È chiaro che su Z dev’essere
l’inclusione naturale in Pn , tutto sta nel vedere se si possa estendere. È chiaro
che l’immagine dell’estensione dovrebbe stare in C. Inoltre dev’essere tutta C,
perchè dev’essere un compatto (infatti X è compatta) che contiene Z. Perciò
andiamo a vedere cosa succede nell’intorno dei punti di C che non stanno in Z.
Siano questi r1 , . . . , rN . Per ogni i prendiamo un intorno Ui di ri tale che abbia
le seguenti proprietà:
• sia contenuto in un intorno biolomorfo alla palla unitaria in CN
• la sua immagine tramite π sia interamente contenuta nel dischetto Dj ,
dove π(ri ) = qj .
questo è chiaramente sempre possibile (è sufficiente intersecare un intorno biolomorfo alla palla unitaria con π −1 (Dj )). Per la costruzione che abbiamo fatto
0
di X, questo aperto conterrà un dischetto bucato in Di,t
“intorno” al punto
mancante. Ma allora l’immagine tramite ϕ di un intorno del punto mancante
è limitata (sta in una cosa che è biolomorfa alla palla unitaria di Cn ) e perciò
si estende. Quindi ϕ si può estendere a un aperto di X in modo che la sua
immagine sia C. Con un discorso locale simile al precedente inoltre, possiamo
dire che se K ⊆ C è compatto, lo è anche ϕ−1 K. Perciò ϕ è propria. Ma questo
implica che ϕ−1 (C) sia compatta e perciò sia tutto X.
Dimostriamo ora che X è connessa, concludendo cosı̀ che si tratta di una
superficie di Riemann compatta. Infatti, se non lo fosse, ciascuna delle sue componenti connesse verrebbe mandata in una curva algebrica per il teorema 4.1.4,
37
per cui C sarebbe unione di un numero finito di chiusi propri, contraddicendo
cosı̀ l’ipotesi di irriducibilità.
Il teorema è stato enunciato e dimostrato solo nel caso delle curve piane, anche se quasi tutta la dimostrazione funzionerebbe ugualmente nel caso generale.
In realtà l’unico problema è la dimostrazione della connessione di X, che ha
bisogno del fatto che l’immagine di una curva analitica è una curva algebrica.
Questo è vero in generale, ma la dimostrazione che abbiamo dato non si adatta
facilmente.
4.3
Formule genere-grado
Prendiamo ora una curva algebrica liscia C, vogliamo collegare in qualche modo
il suo sistema canonico al sistema degli iperpiani. Questo ci porterà, tra le altre
cose, a una formula che determina il genere di una curva algebrica liscia. Supponiamo che l’equazione sia {F (x0 , x1 , x2 ) = 0}. Allora supponiamo senza perdita
di generalità che l’iperpiano H = {x0 = 0} sia trasversale. Mettiamoci quindi
nella carta affine U = {x0 6= 0} e stabiliamo coordinate (x, y) = (x1 /x0 , x2 /x0 ).
Poniamo f (x, y) = F (x, y, 1). La 1-forma
fx dx + fy dy
è identicamente nulla su C ∩ U , per cui risulta ben definita
ω=
dy
dx
=−
fy
fx
su C ∩ U , data dall’incollamento delle due. Osserviamo che non ha nè zeri nè
poli. Vorremmo estenderla a una 1-forma meromorfa globale su C. Sia
H ∩ C = {p1 , . . . , pd }
dove d è il grado di C, di modo che i∗ (H) = p1 + · · · + pn , dove i : C → P2 è
l’inclusione. Allora nell’intorno di p1 , possiamo mettere una coordinata locale t
tale che
1
(x, y) = (h(t), k(t))
t
con h, k olomorfe non nulle. Questo perchè la molteplicità d’intersezione di H
con C è 1 in ogni punto. Quindi, sostituendo nella definizione di ω, in un intorno
di p1 vale
d(h(t)/t)
th0 (t) − h(t)
= td−3
dt
ω=
fy (h(t)/t, k(t)/t)
Fy (h(t), k(t), t)
Quindi, in p1 ω ha esattamente uno zero di ordine d−3. Quindi, poichè lo stesso
discorso vale per ogni pi ,
(ω) = (d − 3)i∗ (H) = i∗ (H d−3 )
38
Di conseguenza, prendendo i gradi
2g − 2 = (d − 3)d ⇒ g =
(d − 1)(d − 2)
2
Forti di questa conoscenza, vediamo ora che le curve piane lisce non sono
iperellittiche
Proposizione 4.3.1. Sia C una curva piana liscia di grado d ≥ 4. Allora C
non è iperellittica
Dimostrazione. Per ogni p, q ∈ C vogliamo far vedere che `(p + q) = 1. Per
Riemann-Roch, è equivalente far vedere che
`(K − p − q) = deg(K − p − q) + 1 − g + `(p + q) = g − 2 .
In altri termini dobbiamo far vedere che esistono elementi di Kp che non stanno
in Kq . Prendiamo G un’ipersuperficie di grado d − 3 in P2 che passi per p ma
non per q. Questo è possibile perché d ≥ 4. Allora il divisore
G
+ (d − 3)i∗ (H)
i∗ (G) =
H d−3
è un divisore canonico che soddisfa alle nostre richieste.
Osserviamo che se C non fosse stata una curva liscia, la 1-forma ω sarebbe
comunque stata ben definita sulla normalizzazione, ma avrebbe potuto avere
alcuni poli. Questi poli hanno l’effetto di far scendere il grado di (ω) e perciò il
genere della curva Possiamo perciò enunciare la seguente disuguaglianza
Proposizione 4.3.2. Sia C ⊆ P2 una curva algebrica di grado d. Allora, se g
è il genere della sua normalizzazione
g≤
(d − 1)(d − 2)
2
Inoltre vale l’uguaglianza se e solo se C è una curva liscia.
Cerchiamo di migliorare la stima precedente, introducendo il numero di punti
singolari della curva.
ϕ
Sia X −
→ C una curva analitica piana. Un nodo è un punto p ∈ C tale che
abbia esattamente due controimmagini p1 , p2 ∈ X e che le immagini di dϕp1 e
dϕp2 siano distinte (cioè che la curva abbia due tangenti distinte in ciascuno dei
due punti che formano il punto doppio). Studiamo ora il comportamento locale
della 1-forma ω in prossimità di un nodo.
Poichè ϕ ha il differenziale non nullo in p1 e in p2 , esistono intorni U1 e U2
di p1 e p2 tali che ϕ(U1 ) e ϕ(U2 ) siano localmente luoghi di zeri di funzioni
analitiche con differenziale mai nullo. Quindi esiste un intorno V di p e due
funzioni analitiche g1 , g2 : V → C con differenziale mai nullo tali che f = g1 g2 .
Inoltre possiamo dire che g1 , g2 hanno due tangenti differenti in p. Con un rapido
39
conto, da questo deriva che fy ◦ ϕ ha solo zeri semplici in p1 , p2 , e lo stesso vale
per fx ◦ ϕ. Andando a vedere la definizione della 1-forma ω, questo implica che
ogni polo fa scendere il grado di (ω) di due, cioè il genere di 1. Quindi abbiamo
dimostrato il seguente risultato:
Proposizione 4.3.3. Se gli unici punti singolari di una curva piana C di grado
d sono N nodi, il suo genere è
g=
(d − 1)(d − 2)
−N
2
40
Bibliografia
[Mir95]
R. Miranda: Algebraic curves and Riemann Surfaces. American
Mathematical Society (1995)
[Ful95]
W. Fulton: Algebraic Topology. Springer-Verlag (1995)
[ACGH85] E. Albarello, M. Cornalba, P.A. Griffiths, J. Harris: Geometry of
Algebraic Curves. Springer-Verlag (1985)
[Car95]
H. Cartan: Elementary Theory of Analytic Functions of One of
Several Complex Variables. Dover Publications (1995)
[FKr80]
H. M. Farkas, I. Kra: Riemann Surfaces. Springer-Verlag (1980)
41