POLITECNICO DI TORINO
I Facoltà di Ingegneria
Corso di Laurea in Ingegneria Aerospaziale
—orientamento generalista—
Monografia di Laurea
Analisi di un sistema di propulsione
per nanosatelliti modulari
Relatore 1
Candidato
Prof. Ing. Leonardo M. Reyneri
Giorgio Capovilla
·······················································
matr. 154148
Relatore 2
·······················································
Prof. Ing. Lorenzo Casalino
·······················································
Ottobre 2011
__________________________________________________________________________ Introduzione
Introduzione
Uno dei contributi tecnici più importanti ed innovativi del XX secolo fu l’ideazione e la realizzazione del
satellite artificiale. A cominciare dal lancio del veicolo chiamato Sputnik1 del 4 Ottobre 1957, le orbite
terrestri più basse, ed in seguito le più ampie, si popolarono di macchine nelle quali Alberto Moravia
riconobbe “estensioni artificiali di determinate facoltà umane”2. Dalla semplice ed unica capacità del
primo ordigno di poter palesare la propria esistenza, grazie a due trasmittenti, si assistette
all’acquisizione di una moltitudine di nuove abilità, atte a svolgere fondamentalmente due tipi di
compiti: la ricerca pura, in geofisica, astronomia, meteorologia per citare solo le prime discipline
coinvolte, e le applicazioni pratiche, tra cui odiernamente vi sono, ad esempio, la navigazione, il
telerilevamento, la cartografia e le telecomunicazioni. La tecnologia satellitare, inizialmente sviluppata a
scopo di competizione militare e tecnologica, è sfociata in così tanti campi da risultare essenziale anche
per la vita ordinaria.
Se tutto ciò costituisce l’importanza scientifico - applicativa, l’aspetto innovativo risiede nell’aver
congiunto il mondo umano con lo spazio: per la prima volta l’umanità ebbe il modo di osservare il suo
habitat da un nuovo punto di vista. Le parole di Moravia a riguardo sono suggestive: “Mai *…+, in nessun
periodo della storia, è stata offerta all’uomo una meta come questa, concreta e razionale e al tempo
stesso irraggiungibile e utopistica. *…+ Una meta insieme finita e infinita. Le implicazioni psicologiche
politiche e sociali di questo abbinamento, a livello razionale, del finito con l’infinito, sono enormi”3.
Da uno scenario così affascinante, vario e promettente scaturirono i satelliti artificiali, intesi come
oggetti orbitanti attorno ad un corpo celeste, posti in orbita con mezzi tecnologici, solitamente razzi
vettori, a scopo di supporto alle necessità umane. Una loro possibile classificazione tiene conto delle
masse: tra le famiglie più leggere, dette satelliti miniaturizzati, vi sono i micro-satelliti, esemplari da 10 a
100 kg, i nano-satelliti, da 1 a 10 kg, ed i pico-satelliti, da 0.1 a 1 kg. È importante notare come la
massima riduzione di massa possibile sia uno degli obiettivi principali in fase di progettazione. Infatti se
con la seconda legge della dinamica si descrive un razzo lanciatore si può ricavare l’equazione di
Tsiolkovsky4: per un sistema che accelera espellendo alla velocità equivalente ve parte della sua massa
1
Dal russo Спутник, compagno di viaggio.
A. Moravia, A che serve la Luna, in: “L’espresso” del 13 Luglio 1969, p. 12.
3
Ibidem
4
Konstantin Ėduardovič Tsiolkovskij, in russo Константин Эдуардович Циолковский, 1857-1935, pioniere
dell’astronautica.
2
1
Introduzione _________________________________________________________________________
iniziale mi in senso opposto all’aumento di velocità desiderato Δv, giungendo alla massa finale m f,
sussiste la relazione
(0.1)
la quale, esplicitata in mi, avverte che la massa iniziale del mezzo dipende esponenzialmente dalle
caratteristiche del propulsore, tramite ve, e dall’aumento di velocità Δv, fissato una volta determinata
l’orbita da raggiungere. È perciò essenziale ridurre al minimo la massa finale mf, a cui contribuisce il
carico pagante, poiché diventa possibile, a parità di lanciatore, aumentare il carico utile, o a parità di
esso, adottare un lanciatore di minor peso, ingombro e costo.
Questa tesi riguarda parte dello sviluppo del nano-satellite modulare AraMiS (acronimo di architettura
modulare per satelliti), un progetto iniziato nel 2006 presso il Politecnico di Torino, erede di PICPOT, dal
nome del nano-satellite sviluppato precedentemente dallo stesso ateneo. L’architettura fortemente
modulare (a livello meccanico, elettronico e di testing) consente di ridurre i costi di progettazione, che
rappresentano il 90% del bilancio totale, adottando una struttura, utilizzabile in più missioni, suddivisa in
piccole unità intercomunicanti distribuite, assemblate con componenti COTS (Commercial Off The Shelf),
ridondanti per aumentare la tolleranza ai guasti e permettere un degrado accettabile delle prestazioni. Il
satellite appare perciò costituito all’esterno da più tiles (mattonelle intelligenti), assemblabili in forma
cubica o a prisma esagonale, che lasciano spazio vuoto all’interno per il payload, progettato ad hoc per
ogni missione. Le tiles accolgono i sottosistemi del satellite e possono essere solamente di due tipi:
Power management tiles: composte da: un pannello solare, una batteria ricaricabile, un
caricabatteria, un modulo di housekeeping, sensori ed attuatori del sistema di controllo
dell’assetto e dell’orbita, indicato comunemente con AOCS, Attitude and Orbit Control System.
Telecommunication tiles: composte da: CPU, ricetrasmettitore, modem, amplificatore di potenza
(per la trasmissione), amplificatore a basso rumore (per la ricezione) e un sistema di antenne.
Obiettivo del progetto è produrre un cubesat, satellite miniaturizzato di volume e peso contenuti
realizzato con componenti COTS, a struttura modulare di ridotti costi e tempi di sviluppo. La particolare
architettura permette di suddividere le spese tra un elevato numero di missioni, di ridurre i tempi di
produzione e testing, e di effettuare in modo semplice la ridondanza dei sottosistemi; le parti disponibili
sul mercato, benché economiche, per la loro scarsa affidabilità devono essere sapientemente utilizzate
nel progetto e ridondate. Il principale ostacolo per aziende e università che desiderano accedere
all’ambito spaziale è così ridimensionato.
È proposto lo sviluppo del sottosistema di propulsione, dedicato al controllo d’assetto, che si articola
nelle seguenti fasi:
Ipotizzando una massa dai 5 ai 10 kg, una coppia di propulsori per ogni tile e una forza generata
da ciascuno di 0.1 μN, si effettua un’analisi delle manovre d’orbita e d’assetto permesse.
Si procede al calcolo del consumo di energia elettrica e propellente per effettuare una serie di
manovre predefinite, tra cui un deorbiting entro 25 anni.
2
__________________________________________________________________________ Introduzione
Si ipotizza l’architettura meccanica necessaria per installare efficacemente i propulsori sulle
power management tiles di AraMiS.
Si programma il microcontrollore che attua le coppie di propulsori.
L’elaborato giunge a tali risultati dopo aver trattato alcuni argomenti alla base dei problemi, ed è
costituito dai seguenti capitoli:
1. Studio dell’astrodinamica
Per iniziare si affronta la dinamica dei corpi nello spazio interplanetario o interstellare, con
particolare attenzione all’orbita bassa terrestre (LEO, Low Earth Orbit, tra i 600 e gli 800 km di
quota), teatro operativo di AraMiS. Tale disciplina si suddivide in due macro-argomenti: la
meccanica celeste, che riguarda la descrizione di posizione e velocità del centro di massa del
corpo, e la dinamica e il controllo d’assetto, cui competono rappresentazione di posizione nello
spazio e moto rispetto al centro di massa.
Tali aspetti, gestiti dal sottosistema AOCS (Attitude and Orbit Control System), sono di
fondamentale importanza per qualsiasi missione spaziale. La posizione lungo l’orbita e l’assetto
sono misurati da un opportuno set di sensori, classificabili come ottici (sensori di Terra, di Sole o
di stella), giroscopici, o elettromagnetici (magnetometri, che si servono del campo magnetico
terrestre), tutti utilizzati da AraMiS eccetto i sensori di stella. Noti questi dati si può ricostruire
l’orientamento di una terna d’assi cartesiani ortogonali solidale al satellite rispetto a un’altra
terna cartesiana presa a riferimento. Secondo le necessità della fase di missione, l’assetto
iniziale può essere variato tramite opportuni attuatori, comunemente grazie a piccoli propulsori
chimici (chiamati nel complesso RCS, Reaction Control System), scambiando coppie, con ruote
d’inerzia o giroscopi, o ancora sfruttando il campo magnetico terrestre con magneto-torquers.
Nel caso trattato si è preferito adottare un sistema di propulsione elettrico, ruote d’inerzia e
bobine magnetiche.
In aggiunta si può osservare preliminarmente come il satellite in questione non possieda
appendici o estremità allungate: con ciò l’ipotesi di corpo rigido ben si adatta al caso studiato,
semplificando notevolmente la trattazione.
2. Studio del sistema di propulsione adottato
Si è scelto di impiegare il sistema iEPS, ion Electrospray Propulsion System, ideato e realizzato al
Massachussets Institute of Technology, il quale rientra nei propulsori elettrici a emissione di
campo o FEEP (Field Emission Electric Propulsion), tecnologia nata intorno al 1960. Invece di
accelerare volumi di propellente attraverso un ugello grazie a un rapporto di pressioni tra le
sezioni iniziale e finale, come avviene nei tradizionali propulsori chimici, per mezzo di un campo
elettrostatico si aumenta il modulo della velocità di ioni nella direzione desiderata. Questi sono
ottenuti dalla rottura di alcuni legami ionici di tutte o parte delle molecole di propellente,
operata dallo stesso campo elettrico. Sono prodotte spinte dell’ordine di μN, a livelli di consumi
e ingombri molto ridotti, tanto da alloggiare l’intero sottosistema, completo di propellente, in
pochi mm3 di volume sulle power management tiles. Tuttavia, per conservare la neutralità
elettrica dell’intero satellite, è necessario predisporre una emissione di cariche simmetrica. A ciò
si provvede solitamente con un neutralizzatore, un dispositivo che emette cariche di segno
3
Introduzione _________________________________________________________________________
opposto ai getti degli emettitori ma non produce spinta utile, oppure, come nel presente caso,
con una coppia di gruppi di emettitori che contribuiscono alla spinta eiettando alternativamente
ioni positivi e negativi. L’aspetto innovativo di iEPS risiede nel realizzare fitti array bidimensionali
di emettitori, da 400 a 600 in 1 cm2, in Nichel poroso attraverso processi di produzione
all’acquaforte avanzati.
3. Calcolo delle prestazioni sopra indicate
Tale sezione contiene lo sviluppo suddetto.
4. Studio e programmazione del microcontrollore
Il microcontrollore è un’unità elettronica, integrata su singolo circuito stampato, tipica dei
sistemi embedded. Spesso nominata in letteratura come MCU, Micro Controller Unit, assolve
funzioni di controllo digitale; in questa sede gestisce la regolazione, il controllo e la
commutazione di una coppia di array di emettitori. La regolazione, cioè la modulazione della
spinta, avviene attraverso la PWM, Pulse Width Modulation o modulazione di larghezza
d’impulso, configurata esternamente alla MCU; il controllo riguarda un trasformatore LV/HV in
corrente continua che fornisce la tensione per generare il campo che accelera gli ioni; questa
viene cambiata di segno alla frequenza di circa 1 Hz per evitare accumuli di ioni a carico degli
emettitori.
Si riportano infine: un esempio di configurazione cubica con una telecommunication tile, che alloggia un
payload in figura 1.1 e un esempio di configurazione a prisma esagonale ospitante un telescopio in
figura 1.2.
4
__________________________________________________________________________ Introduzione
Power management tiles
Telecommunication tile
Figura 1.1: configurazione cubica del satellite AraMiS
Telescopio
Figura 1.2: configurazione prismatica del satellite AraMiS
5
6
________________________________________________________________ Il problema dei due corpi
Capitolo 1
1 I principali concetti dell’astrodinamica e
del controllo d’assetto
Una differenza tra le manovre orbitali e di assetto sta nel loro sviluppo storico. Prevedere il moto
orbitale di corpi celesti è uno dei problemi scientifici più antichi, e fu la motivazione iniziale per la
maggior parte delle ricerche di Newton1. Anche se la navigazione spaziale ha comportato lo sviluppo o la
nascita di nuovi campi dell’analisi delle orbite, gran parte della teoria esiste da alcuni secoli. Al contrario,
lo studio della dinamica e del controllo d’assetto è iniziato in occasione del lancio del veicolo chiamato
Sputnik, il 4 ottobre 1957. Di conseguenza, la teoria non è ancora stata organizzata in modo organico e
completo, il relativo linguaggio tecnico si sta ancora evolvendo, e molti termini non hanno significati
universalmente accettati. Diversamente, la dinamica orbitale si avvale di un gergo estremamente
preciso.
1.1 Il problema dei due corpi
La meccanica orbitale, applicata ai satelliti artificiali, si basa sulla meccanica celeste. Kepleroo2 fornì tre
leggi empiriche che descrivono il moto dei pianeti nelle orbite planetarie indisturbate, e Newton,
formulando le leggi generali che governano la dinamica planetaria, spiegò le cosiddette leggi di
Kepleroo. In questo paragrafo si ripercorre la ricostruzione di Newton delle orbite ideali ed indisturbate.
Le orbite reali risentono di forze perturbative ed anomalie fisiche che conferiscono loro strane
proprietà, non considerate in questa trattazione, dal momento che il suo scopo è fornire una
valutazione delle prestazioni di un sottosistema propulsivo.
1
2
Isaac Newton, 1643-1727, matematico, fisico ed alchimista inglese.
Johannes Kepler, 1571-1630, matematico ed astronomo tedesco.
7
I principali concetti dell’astrodinamica e del controllo d’assetto ________________________________
Fig 1.1.1: problema dei due corpi
Si riduca Il corpo celeste, naturale od artificiale, ad un punto materiale. Si vuole studiare la situazione
idealizzata che prevede l’esistenza di due soli corpi, in moto relativo, che interagiscono con il campo di
forze descritto dalla legge di gravitazione di Newton. Il sistema appare come in figura 1.1.1; m2 esercita
una forza di attrazione su m1 F12, ed m1 un’azione F21 su m2:
(1.1.1)
(1.1.2)
Dove G, costante di gravitazione universale, vale 6,67259 × 10-11 m³ s-2 kg-1. Dalle precedenti equazioni si
ricava, ponendo r = r2 - r1,
(1.1.3)
(1.1.4)
La 1.1.4 è l’equazione del moto basilare del problema dei due corpi. Si discutono ora alcune proprietà
del sistema.
Il vettore posizione rc del centro di massa (CM) soddisfa la relazione
.
Ponendosi nel suo sistema di riferimento, i vettori posizione ra ed rb rispettivamente delle masse m1 ed
m2 non sono altro che le loro distanze dal baricentro. Si ottiene
. Dalla geometria del sistema si trova ra = rc - r1 ed rb = r2 - rc, e di conseguenza m1(rc-r1)
- m2(r2-rc) = 0, oppure
(1.1.5)
Differenziando due volte l’ultima equazione, tenendo in conto la definizione di forza gravitazionale nelle
1.1.1, 2 si giunge a
(1.1.6)
(1.1. 7)
8
________________________________________________________________ Il problema dei due corpi
Il centro di massa non è mai accelerato, e può trovarsi in moto rettilineo uniforme.
Ricorrendo ancora al sistema di riferimento del centro di massa, si trovano le relazioni rb = ra (m1/m2) ed
r = ra (1+m1/m2), Differenziando si ottiene
(1.1.8)
(1.1.9)
Se, ad esempio, m1 >> m2, allora → 0 ed → r. Più la massa m2 è ridotta meno influenza ha sul moto
globale; un sistema di riferimento centrato nel punto m1 può, in questo caso, essere considerato
inerziale.
Prima di passare alla soluzione dell’equazione del moto 1.1.4, si ricordano alcune proprietà del vettore
momento angolare. Dato un punto materiale di massa m e vettore posizione r rispetto all’origine di un
generico sistema di riferimento xOy, il momento angolare H, rispetto al polo O, è definito come
(1.1.10)
Dove q rappresenta il vettore quantità di moto di m. È ben nota la relazione tra H ed il momento della
risultante delle forze M, rispetto allo stesso polo O:
(1.1.11)
Che vale anche nel caso di punti materiali a massa non costante. Se l’azione sul corpo si riduce alla forza
gravitazionale, il suo momento rispetto all’origine degli assi coordinati è nullo, essendogli parallelo, e
perciò il momento angolare è costante nel tempo, perpendicolare ad r e v per le proprietà del prodotto
vettoriale. Il moto del punto ha luogo nel piano xOy. Prima di procedere si specializza la forma del
momento angolare al caso studiato, con l’aiuto di figura 1.1.2.
Fig 1.1.2: componenti di velocità della massa
puntiforme
(1.1.12)
9
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
È molto più utilizzato il momento angolare per unità di massa h:
(1.1.13)
Si può ora procedere alla soluzione dell’equazione del moto per un sistema di due punti materiali di
masse M ed m. Data la sua planarità, si adotta il sistema di coordinate polari (r,θ) con centro nel punto
materiale di massa M (figura 1.1.2). r è il modulo del vettore posizione di un generico punto dall’origine
degli assi coordinati e θ la sua anomalia rispetto all’asse delle ascisse. I due versori i e j sono scelti in
modo da essere paralleli rispettivamente ad r e vv, componente della velocità normale ad r. Si ottiene
perciò l’equazione completa del moto dalla seconda legge di Newton:
(1.1.14)
Con μ = GM; che nel caso di moto intorno alla Terra assume il valore μ⨁ = GM⨁ = 3,986 × 1014 m3 s-2.
Considerando la componente trasversale j si ricava
(1.1.15)
Niente altro che la conservazione del momento angolare già discussa. Più interessante è la componente
i,
(1.1.16)
Che pone un’equazione non lineare né direttamente risolvibile. Si può comunque trovare la soluzione in
forma chiusa con la sostituzione r = 1/u. Sostituendo si ha
(1.1.17)
Ma ricordando la forma del momento angolare (1.1.12) è anche vero che
(1.1.18)
Ne segue
(1.1.19)
(1.1.20)
10
________________________________________________________________ Il problema dei due corpi
Inserendo le sostituzioni 1.1.17, 19 nell’equazione di partenza 1.1.15 se ne ricava una forma risolvibile
analiticamente:
(1.1.21)
Infatti è un’equazione lineare del second’ordine che ha soluzioni armoniche in θ:
(1.1.22)
Dove c e θ0 sono costanti arbitrarie. La prima ha un significato energetico, perciò si analizza ora la
struttura dell’energia meccanica del sistema. Naturalmente la forza gravitazionale è conservativa, ed
ammette un potenziale ed un’energia potenziale U tale che ∂U/∂r = F = GMm/r2, ossia U = -GMm/r. La
conservazione dell’energia impone che l’energia per unità di massa del punto materiale E = v2/2-μ/r sia
costante. Si può esplicitare il termine v2 sfruttando le posizioni precedenti:
(1.1.23)
Sostituendovi la soluzione e la sua derivata, du/dθ = -c sin(θ-θ0), e svolgendo i quadrati si giunge a
(1.1.24)
L’energia per unità di massa allora diventa
(1.1.25)
Da cui segue che
(1.1.26)
Dove si è scelta la radice positiva dell’equazione perché, se r ha il significato di distanza, positiva, anche
u lo deve rimanere. Definendo l’eccentricità e come e =
, si ottiene un’importante relazione
(1.1.27)
Sostituendo u = 1/r nella soluzione 1.1.21 e tenendo conto dell’eccentricità e si giunge alla forma più
utilizzata dell’equazione di un’orbita ideale, detta orbita kepleriana:
(1.1.28)
11
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
Il parametro p, costante per una data orbita, è detto semilato retto. Tale rielaborazione rappresenta una
sezione conica, in coordinate polari, di eccentricità e. Tipicamente l’anomalia si calcola a partire dal
semiasse positivo delle ascisse, si pone perciò θ0 = 0. Il moto di un punto materiale sottoposto ad una
forza centrale come quella gravitazionale descrive una traiettoria che è una conica, cioè una parabola,
un ellisse od un’iperbole. Ognuna di queste curve è caratterizzata da un range di eccentricità e perciò
anche da una precisa energia, per la relazione fondamentale 1.1.27.
1.2 Le orbite kepleriane
Nel seguente paragrafo si passeranno in rassegna le orbite kepleriane che descrivono coniche non
degeneri, cioè circonferenze, ellissi, parabole ed iperboli. La relazione tra energia specifica ed
eccentricità del moto 1.1.27 mette in luce una proprietà fondamentale. Tutte le orbite ad eccentricità
minore di 1, cioè circonferenze ed ellissi, possiedono energia specifica negativa; ciò significa che il corpo
che la percorre non è in grado di vincere l’attrazione gravitazionale della massa centrale (nel presente
caso il pianeta Terra). I rami dell’iperbole, che ha eccentricità superiore all’unità, rappresentano le
traiettorie, aperte, dei punti materiali che possono allontanarsi indefinitamente dal centro di attrazione.
La parabola ha eccentricità unitaria e rappresenta il luogo dei punti con energia cinetica esattamente
uguale a quella potenziale (a parità di massa) quindi in grado anch’essi di allontanarsi all’infinito dal
proprio fuoco. Se si suppone che M >> m, per quanto mostrato prima, la scelta di porre l’origine degli
assi coordinati in M rende praticamente inerziale il sistema di riferimento, pertanto si procederà in
questo modo.
L’orbita circolare (e = 0) ha energia che vale
(1.2.1)
Il suo raggio vettore, tracciato dal fuoco, è costante nel moto e l’angolo β della figura 1.1.2 è nullo,
perciò si ha
(1.2.2)
La velocità orbitale risulta perciò costante.
12
____________________________________________________________________ Le orbite kepleriane
Fig 1.2.1: orbita ellittica
In un’orbita ellittica (figura 1.2.1), di eccentricità 0 < e < 1, si riconoscono subito due punti particolari. Il
punto A, ad anomalia nulla, è l’estremo del raggio vettore minimo tracciabile dal fuoco principale e
viene chiamato periastro, in orbite terrestri (cioè il cui fuoco principale è occupato dalla Terra) perigeo e
perielio in orbite solari. Il suo opposto, situato a θ = π/2, è il massimo raggio vettore, denominato
apoastro, apogeo o afelio rispettivamente nei casi di orbita generica, terrestre o solare. Dall’equazione
delle coniche 1.1.28 si possono ricavare i raggi vettori di tali punti, rispettivamente rp ed ra:
(1.2.3)
(1.2.4)
Da questi due un’equazione per l’eccentricità:
(1.2.5)
L’energia meccanica per unità di massa è naturalmente costante, non esistendo forze dissipative, poiché
lo è l’eccentricità e; se ne può cercare con successo il valore. Il semiasse maggiore vale a:
(1.2.6)
(1.2.7)
L’energia specifica totale, ricordando la relazione fondamentale 1.1.27 e la 1.2.7 appena ricavata
assume il valore
(1.2.8)
13
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
Il valore all’ultimo membro della 1.2.8 è chiamato costante dell’energia. A differenza delle orbite
circolari, la velocità non è più costante lungo la traiettoria. Per completare la descrizione geometrica
mancano la distanza focale c ed il semiasse minore b. Dalla geometria è ben noto che c = ae.
Rammentando la 1.2.7 si ottiene il valore della distanza focale c:
(1.2.9)
Utilizzando un’altra relazione geometrica si trova quanto vale il semiasse minore b:
(1.2.10)
Dove si è scelto ovviamente il valore positivo in quanto b ha il significato di distanza.
Le relazioni sul semiasse maggiore 1.2.7 ed 1.2.8 ricavate sono fondamentali, in quanto sono mantenute
anche per gli altri tipi di orbite.
Le traiettorie paraboliche non rivestono un elevato interesse pratico, ma definiscono alcuni valori
caratteristici. La relativa equazione può essere scritta in funzione del vertice della conica:
(1.2.11)
(1.2.12)
(1.2.13)
Poiché l’energia meccanica per unità di massa è nulla, dalla relazione precedente 1.2.8 si ricava a → ∞ e
che la velocità
(1.2.14)
È di nuovo variabile, e rappresenta esattamente l’energia cinetica necessaria a vincere l’attrazione del
corpo nel fuoco principale. Tale velocità di fuga è maggiore di un fattore
circolare alla stessa distanza r dal fuoco F.
della velocità per un’orbita
Le traiettorie iperboliche sono necessarie per le rotte interplanetarie dei veicoli spaziali. Avendo energia
cinetica positiva, il corpo non ruota intorno al corpo principale. Dal momento che E > 0, ne seguirebbe a
= -μ / (2E) < 0.
14
____________________________________________________________________ Le orbite kepleriane
Fig 1.2.2: orbita iperbolica
Come fatto sopra, si ricavano alcune grandezze geometriche, con l’aiuto della figura 1.2.2. Per r → ∞, il
denominatore della 1.2.16 deve annullarsi, essendo p costante per una data orbita:
(1.2.15)
Ma poiché ε = π - θas = π/2 - δ/2, vale anche θas = π/2 + δ/2, e si può scrivere
(1.2.16)
Fig 1.2.3: studio del comportamento asintotico di un’orbita iperbolica
Il comportamento all’infinito permette anche di ricavare l’energia associata all’orbita. Si consideri la
figura 1.2.3; il modulo del momento angolare ad una distanza infinita dall’origine degli assi coordinati
vale h = Vr sinα = V∞Δ. L’energia meccanica totale vale
(1.2.17)
Di conseguenza si trovano il semiasse maggiore ed il semilato retto:
15
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
(1.2.18)
(1.2.19)
Da cui si ricava l’eccentricità e:
(1.2.20)
1.3 Le leggi di Keplero
Dalla trattazione precedente risulta ben giustificata la prima delle tre leggi, empiriche, formulate da
Keplero: l’orbita di ciascun pianeta ha forma ellittica, con il sole che ne occupa uno dei fuochi. Le ultime
due, per poter essere dimostrate, necessitano di alcuni semplici passaggi e l’aiuto di figura 1.3.1, che
mostra un raggio vettore che spazza in un intervallo di tempo differenziale un’area differenziale. Il suo
valore è
Fig 1.3.1: studio infinitesimale della cinematica orbitale
θ
(1.3.1)
Per orbite di ogni forma, il rateo di variazione dell’area spazzata da un raggio vettore è costante, o anche
raggi vettori non coincidenti spazzano aree uguali in tempi uguali. Questa è la seconda legge di Keplero.
L’integrazione della 1.3.1 porta a calcolare l’area spazzata in un tempo finito t:
(1.3.2)
Si conclude immediatamente che la costante arbitraria A0 deve valere 0, essendo l’area spazzata in un
tempo nullo. Per un’orbita ellittica di periodo T, l’area spazzata totale ammonta ad A = πab. Esplicitando
T dalla 1.3.2, si ottiene:
16
_____________________________________________________________________ Le leggi di Keplero
π
π
μ
π
μ
π
(1.3.3)
μ
In altre parole, il periodo orbitale è proporzionale ad a3/2, almeno per un’orbita ellittica, che è la terza
legge di Keplero. Il termine n è chiamato moto medio.
Fig 1.3.2: anomalia vera ed eccentrica
La posizione di un punto materiale su una generica orbita può essere descritta sia in termini di anomalia
θ rispetto al semiasse maggiore, sia con il tempo trascorso dal passaggio al periastro. Per trattare la
scrittura temporale è utile introdurre il concetto di anomalia eccentrica ψ, oltre l’anomalia vera θ già
utilizzata; la costruzione geometrica, nel caso di orbita ellittica, che ne permette la determinazione è
mostrata in figura 1.3.2. Essa consiste essenzialmente nel disegnare una circonferenza ausiliaria di
raggio a, centrata nell’origine degli assi coordinati e considerarne il raggio che passa per il punto
corrispondente all’estremo del raggio vettore r. Si ricavano ora alcune importanti relazioni tra anomalia
vera ed eccentrica, almeno per il caso di orbita ellittica. Si ha x + y = c = ae, x = a cosψ, y = r cos(π-θ) = -r
cosθ, perciò x + y = a cosψ – r cosθ = ae. Richiamando l’equazione delle coniche in forma polare 1.1.28 e
la relazione fondamentale p = a (1 – e2) (1.2.7) si trova
θ
θ
θ
θ
ψ
θ
θ
θ
(1.3.4)
Da cui si ricavano le relazioni cercate:
θ
θ
ψ
ψ
θ
ψ
ψ
ψ
17
(1.3.5)
θ
θ
(1.3.6)
(1.3.7)
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
θ
ψ
θ
ψ
(1.3.8)
La 1.3.7 è stata ricavata invertendo la 1.3.5, e si è adottato il segno positivo per le rimanenti equazioni
perché i seni dei due angoli hanno, per valori corrispondenti, lo stesso segno (si veda la figura 1.3.2) ed il
rimanente fattore è positivo, essendo l’eccentricità compresa tra i valori 0 < e < 1. Si può ancora
esprimere il legame tra le tangenti dei due angoli, ricordando una semplice identità trigonometrica:
θ
θ
ψ
θ
(1.3.9)
Un’ultima importante relazione si può ricavare sostituendo la 1.3.7 nell’equazione delle coniche
(1.1.28):
(1.3.10)
Fig 1.3.3: deduzione della terza legge di Keplero
Si può ora procedere al calcolo della posizione in funzione del tempo. Ricordando la legge delle aree
applicata al punto M di figura 1.3.3, si può impostare la proporzione:
(1.3.11)
π
Dove S è l’area della superficie tra parentesi e tM il tempo trascorso dal passaggio al periastro, tM = t - tP.
La relazione geometrica
(1.3.12)
ψ
π
π
18
ψ
(1.3. 13)
_____________________________________________________________________ Le leggi di Keplero
Permette di scrivere
ψ
ψ
ψ
(1.3.14)
ψ
ψ
ψ
ψ
Sostituendo nella proporzione 1.3.11 le relazioni 1.3.12, 1.3.14 si giunge alla cosiddetta equazione del
tempo di Keplero:
ψ
π
ψ
π
ψ
ψ
(1.3.15)
Che è un’elegante proporzione tra il periodo dell’orbita ed il tempo trascorso dal passaggio al periastro.
Definendo come anomalia media M la quantità geometrica ψ – e sinψ, se ne può ricavare una forma più
compatta:
(1.3.16)
π
Conoscendo l’eccentricità e e l’anomalia vera θ, calcolando l’anomalia eccentrica ψ con le 1.3.5, 6 si può
conoscere il tempo tM con la proporzione appena ricavata (1.3.15). Più arduo da risolvere è il problema
inverso, cioè calcolare la posizione angolare θ ad un dato tempo, conoscendone l’eccentricità e: è
possibile trovare l’anomalia media M (1.3.16), ma occorre procedere per via numerica per ricavare
l’anomalia eccentrica ψ, da cui poi si risale a quella vera (1.3.7, 8). Lagrange1 fornì una soluzione del
problema con soluzioni di prova di tipo trigonometrico.
Tutto il discorso sviluppato finora riguarda un’orbita di tipo ellittico. Volendo estendere il discorso alle
traiettorie iperboliche, con ragionamenti analoghi si definisce l’anomalia ϕ ed nhyp.
θ
ϕ
θ
,
μ
(1.3.17)
(1.3.18)
E si trova una forma opportuna dell’equazione del tempo di Keplero
ϕ
ϕ
(1.3.19)
Con Mhyp anomalia media dell’orbita iperbolica. Valgono le stesse considerazioni di prima sulla soluzione
del problema diretto ed inverso.
Un’altra via per risolvere il problema è integrare direttamente l’equazione del momento angolare
1.1.12, ottenendo così un’equazione che mette in relazione il tempo tM direttamente con l’anomalia
vera θ. Nel caso di orbita ellittica, si ottiene:
1
Joseph-Louis Lagrange, 1736-1813, matematico ed astronomo italo-francese
19
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
θ
θ
μ
θ
μ
(1.3.20)
Integrando tale equazione si ottiene:
θ
θ
θ
μ
(1.3.21)
Similmente, per orbite iperboliche si trova:
θ
θ
θ
μ
θ
(1.3.22)
Nel caso si voglia studiare un’orbita circolare, è sufficiente osservare che è analoga ad una ellittica con
eccentricità nulla, ed utilizzare i relativi risultati.
1.4 I parametri orbitali
Dalla trattazione precedente si possono facilmente individuare i parametri che identificano
univocamente un’orbita, dato il piano nel quale si sviluppa, indipendentemente dal suo orientamento
rispetto al sistema di riferimento. Dal punto di vista geometrico, è sufficiente avere a disposizione la
misura del semiasse maggiore e l’eccentricità e. Fisicamente, una volta nota la massa del corpo nel
fuoco principale, quindi μ, questi due parametri sono contenuti nel semilato retto p (1.2.7), e si possono
ricavare a partire dal momento angolare per unità di massa h e dall’energia (1.1.27). Si vuole ora fornire
una descrizione geometrica più precisa della posizione di un corpo in orbita kepleriana, ed indicare quali
parametri sono necessari a definirla univocamente nello spazio. Per fare ciò, naturalmente, bisogna
prima disporre di un sistema di riferimento.
Fig 1.4.1: orbita terrestre
Forse la scelta più spontanea è adottare come origine degli assi coordinati il centro di massa dell’intero
sistema solare, che è inerziale rispetto alle altre stelle. Dato che l’orbita terrestre intorno al Sole ha
eccentricità quasi nulla e il suo periodo è abbastanza elevato, si può considerare il suo moto come
inerziale rispetto al sistema solare, e quindi anche rispetto al suo centro di massa. Tuttavia, il teatro
20
_____________________________________________________________________ I parametri orbitali
operativo di gran parte delle missioni spaziali, e quella di AraMiS non fa eccezione, è rappresentato dalle
vicinanze della Terra, ancora oggi; sembra perciò più allettante centrare il sistema di riferimento nel
baricentro terrestre, da cui si dipartono tre assi cartesiani coordinati. L’asse Z è definito come l’asse di
rotazione terrestre, con direzione concorde alla regola della mano destra, ed interseca la sfera celeste al
polo celeste. Gli assi X ed Y giacciono sul piano equatoriale terrestre, ortogonale a quello di rotazione.
Per definire l’asse delle ascisse si considera l’intersezione tra il piano equatoriale ed il piano che
contiene l’orbita terrestre, detto piano dell’eclittica, inclinato rispetto al primo di circa 23,5° (si veda
figura 1.4.1). La sua direzione, considerando il pianeta Terra, è da ovest verso est. L’intersezione del
semiasse positivo con la sfera celeste è nota come punto gamma, primo punto dell’Ariete o punto
vernale, ed indicata con un simbolo simile alla lettera greca Υ; l’asse delle ordinate completa la terna
destrorsa. Il punto dell’Ariete è chiamato così perché tra il 2000 AC ed il 100 AC il Sole, all’equinozio di
primavera si trovava, proiettato sulla sfera celeste, nella costellazione dell’Ariete. Oggi esso si trova, in
quel giorno, nella costellazione dei Pesci. Ciò fa pensare che il sistema di riferimento scelto non è del
tutto fisso rispetto alle altre stelle. Le forze causate dal Sole e dalla Luna perturbano l’asse di rotazione
terrestre, provocando un moto di precessione, una rotazione con periodo di 25800 anni ed ampiezza di
23,5° ed uno di nutazione, un’oscillazione intorno alla circonferenza descritta a causa della precessione,
con periodo di 18,6 anni ed ampiezza di 9’’21. Anche il piano equatoriale è disturbato, ma dal moto degli
altri pianeti, che provocano una rotazione dell’intera orbita, e perciò anche dell’asse delle ordinate del
sistema di riferimento geocentrico. Di conseguenza, tale sistema di assi coordinati si può considerare
solo quasi-inerziale, nel senso che le accelerazioni e le posizioni relative variano molto lentamente nel
tempo; si indica perciò, oltre alla posizione di ciò di cui si parla, anche la data alla quale si riferisce il
sistema geocentrico utilizzato, del tutto convenzionale. Ad esempio si prendeva a riferimento il primo
Gennaio 1950 per misurare la posizione delle stelle, oggi, per evitare inutili e pericolosi scarti, si adotta il
sistema di riferimento così com’era il primo Gennaio 2000.
Ora che il sistema di coordinate geocentrico è ben definito, si possono discutere i parametri che
identificano un’orbita. I primi tre sono già noti e ne sono necessari altrettanti in aggiunta; sono illustrati
in figura 1.4.2. In primo luogo il piano dell’orbita ha un’inclinazione i sull’asse equatoriale, positiva verso
l’asse Z, ed i due si intersecano sulla cosiddetta linea dei nodi. La distanza angolare che separa questa
dal semiasse positivo delle ascisse è misurata dall’ascensione retta Ω, positiva verso l’asse Y. Ogni raggio
vettore parte dall’origine del sistema di riferimento, che è anche il fuoco principale dell’orbita, in
particolare rp è quello del perigeo. L’angolo tra questo e la linea dei nodi è chiamato argomento del
perigeo ω, positivo dalla linea dei nodi verso il perigeo. Tale terna, completata con i tre parametri
geometrici che riguardano l’orbita nel piano, cioè il suo semiasse maggiore ed eccentricità e l’anomalia
media del punto
21
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
Fig 1.4.2: parametri orbitali
materiale che la percorre ad una data epoca, costituisce un set di sei parametri sufficienti a definire la
posizione di un corpo nello spazio, che si muova lungo un’orbita ideale kepleriana. I parametri orbitali
classici sono quindi definiti come:
(1)
(2)
(3)
(4)
(5)
(6)
a, il semiasse maggiore;
e, l’eccentricità;
i, l’inclinazione;
Ω, l’ascensione retta;
ω, l’argomento del perigeo;
M, l’anomalia media all’epoca considerata;
ed è conveniente raggrupparli nel vettore [α]=[a e i Ω ω M]T. Le orbite a inclinazione i nulla o bassa sono
dette equatoriali.
1.5 Le manovre orbitali
Una manovra orbitale permette ad un veicolo spaziale di passare dall’orbita di partenza ad un’altra
prestabilita, grazie all’applicazione di una spinta, realizzata dal sottosistema propulsivo. Tale possibilità,
naturalmente, è indispensabile in molte missioni spaziali, spesso addirittura per l’inizio della missione
stessa. Il lancio di un satellite, ad esempio, termina sulla cosiddetta orbita di trasferimento, e sono
necessarie, da parte del carico pagante del lanciatore, più manovre orbitali per giungere all’orbita
designata nel profilo di missione. Anche se il razzo vettore fosse in grado di portare il suo carico
sull’orbita finale, ciò non sarebbe vantaggioso dal punto di vista energetico. Un aspetto particolarmente
importante per una manovra orbitale è il consumo di propellente legato alla spinta applicata, o, in altre
parole, alla differenza di velocità Δv che essa produce, da cui si può calcolare la massa di propellente
consumato grazie all’equazione del razzo di Tsiolkovsky (0.1), che è approfondita al paragrafo 2.1 del
capitolo 2. L’importanza è evidente se si pensa che, in fase di progetto della missione, si dispone di un
22
____________________________________________________________________ Le manovre orbitali
certo budget di massa per il carico pagante, che dipende essenzialmente dal tipo di razzo vettore
utilizzato; più le manovre orbitali che si ritengono necessarie sono dispendiose, meno massa si lascia al
carico utile del veicolo.
Una prima distinzione fondamentale delle manovre orbitali riguarda la durata del periodo di accensione
rispetto al periodo orbitale. Per le cosiddette manovre impulsive, il tempo di accensione è trascurabile, e
di conseguenza si può assumere che la spinta sia fornita in un intervallo di tempo infinitesimale, il che
rappresenta chiaramente una semplificazione comoda per i calcoli, senza riscontri nella realtà. Più
complessa è la trattazione di manovre non impulsive, nelle quali la spinta si pensa applicata in un tempo
finito, e non ha perciò direzione costante. Poiché solo una componente di spinta agisce lungo la
direzione media della spinta globale, si hanno necessariamente perdite di potenza utile rispetto al primo
caso.
In questo paragrafo si considereranno solo manovre tra orbite ideali kepleriane circolari. Nel caso di
manovra impulsiva a singolo impulso, la determinazione del V sarebbe estremamente semplice:
basterebbe calcolare le velocità orbitali, costanti lungo le traiettorie, di partenza e d’arrivo e sottrarle,
noti i raggi e la massa del corpo nel fuoco principale. Tuttavia una tale approssimazione non ha nulla a
che fare con il regolare azionamento del propulsore iEPS, che genera una spinta di piccola entità e lunga
durata; è necessario perciò adottare il modello a spinta non impulsiva, di cui si forniscono i principali
risultati.
Innanzitutto è necessario decomporre la spinta T in componenti orbitali. Si definisce β l’angolo tra l’asse
della spinta ed il piano dell’orbita, positivo verso il Nord, ed α l’angolo tra la componente della spinta nel
piano orbitale ed il vettore velocità. Le componenti che ne risultano sono FT, nella direzione della
velocità orbitale, FN, che giace sullo stesso piano ma ha direzione che interseca il fuoco principale, ed FZ,
normale al piano dell’orbita; la loro determinazione è un problema trigonometrico.
β
α
(1.5.1)
β
α
(1.5.2)
β
(1.5.3)
Per orbite circolari o quasi circolari, con ridotte eccentricità ed inclinazione, è possibile ricavare le
seguenti equazioni del moto, rifacendosi ai parametri orbitali ed utilizzando il pedice 0 per le condizioni
iniziali:
Ω
ω
θ
ω
θ
(1.5.4)
(1.5.5)
(1.5.6)
θ
23
θ
(1.5.7)
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
ω
θ
θ
ω
θ
(1.5.8)
Combinando queste equazioni con le espressioni delle componenti della velocità se ne ricava una forma
più utile:
α
θ
ω
(1.5.9)
β
α
θ
β
θ
α
β
β
(1.5.10)
(1.5.11)
In particolare dall’ultima si possono dedurre facilmente le condizioni ottimali per una variazione di
inclinazione massima. Naturalmente la direzione della spinta deve giacere sulla normale al piano
orbitale; meno intuitivo è che la posizione migliore lungo l’orbita sia l’intersezione col piano equatoriale
(ω+θ nullo per incremento massimo, angolo piatto per una diminuzione massima); infine, a parità di
altri fattori, un maggior raggio iniziale aumenta l’incremento di inclinazione.
La manovra che si intende esaminare è un passaggio da un’orbita circolare di velocità V0 ad un’altra,
sempre circolare, di velocità V. Per determinare la manovra ottimale e consentire una soluzione in
forma chiusa del problema, si accettano due ipotesi: le orbite intermedie rimangono all’incirca circolari e
l’angolo β rimane costante ad ogni rivoluzione. In realtà l’ultima assunzione comporta una manovra
molto vicina, ma non coincidente, con quella ottimale, col vantaggio di presentare una soluzione in
forma chiusa, al contrario del caso esatto. La variazione di velocità che si ottiene è la seguente:
π
(1.5.12)
La quale per inclinazione nulla si riduce al valore assoluto della differenza tra le velocità orbitali iniziale e
finale.
1.6 La dinamica ed il controllo d’assetto
Si vuole ora descrivere l’orientamento nello spazio del satellite, cioè il suo assetto, per ogni posizione
assunta lungo una possibile orbita; per fare ciò è indispensabile abbandonare l’approssimazione a punto
materiale. Come anticipato nell’introduzione, la compattezza di AraMiS permette di utilizzare, senza
errori significativi, il modello di corpo rigido; inoltre il particolare sistema di propulsione iEPS,
approfondito al capitolo 2, dispone di serbatoi di propellente di dimensioni talmente ridotte da poter
ignorare la variazione di massa lungo una manovra ed il movimento del fluido propulsivo al loro interno.
In altre parole, le proprietà di inerzia del corpo rimangono pressoché costanti nel tempo.
Ciò premesso, è necessario in primo luogo fornire una descrizione dell’assetto del satellite, definendo un
opportuno sistema di riferimento ad esso solidale, e in seguito determinare le equazioni che lo
24
_______________________________________________________ La dinamica ed il controllo d’assetto
governano. Sia tale sistema di riferimento ℱB, costituito da una terna di assi coordinati cartesiani (assi
corpo), di versori (e1, e2, e3); si definisca inoltre un sistema di riferimento ℱI con origine coincidente al
primo, ma inerziale rispetto alla terna geocentrica (paragrafo 1.4), con assi coordinati cartesiani di
versori (E1, E2, E3). Ciascun vettore v può essere scritto in termini di assi corpo come vB=(x, y, z) o di assi
inerziali come vI=(X, Y, Z). Utilizzando i versori delle due terne si ha:
(1.6.1)
Il versore dell’i-esimo asse corpo ei avrà componenti (e1,i, e2,i, e3,i) in assi inerziali:
,
,
,
(1.6.2)
,
Ed in generale si può scrivere:
,
,
,
,
,
,
,
,
,
(1.6.3)
E, raccogliendo opportunamente a fattor comune, si ottiene la struttura della forma in componenti del
sistema ℱI del vettore v:
,
,
,
,
,
,
,
,
,
(1.6.4)
Il passaggio dalla rappresentazione vB in componenti di ℱB a quella in componenti di ℱI, vI, si può
esprimere efficacemente in termini matriciali:
,
,
,
,
,
,
,
,
,
(1.6.5)
Dove vI e vB sono vettori colonna e la matrice LIB è composta di versori colonna, mutuamente ortogonali:
,
,
,
,
,
,
,
,
,
,
,
,
(1.6.6)
È quindi ortogonale, perciò la trasformazione inversa si scrive agevolmente come:
,
,
(1.6.7)
,
,
,
,
25
,
,
,
,
,
,
,
,
,
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
Dove il versore colonna Ei,B=(ei,1, ei,2, ei,3) esprime le componenti dell’i-esimo versore Ei in componenti
della terna d’assi corpo. Vale anche la relazione
,
(1.6.8)
,
,
Le matrici LBI ed LIB rappresentano, naturalmente, delle rotazioni nello spazio, che portano
rispettivamente i sistemi di riferimento ℱI ed ℱB a coincidere con ℱB ed ℱI. La loro struttura varia al
variare del tipo di rotazione imposta, tuttavia si può già anticipare che i 9 parametri non sono
totalmente indipendenti, infatti devono rispettare le condizioni ei·ej=0 per i≠j ed ei·ej=1 per i=j, dove i e
j assumono i valori 1, 2, 3. Con 6 vincoli da rispettare, la rotazione da un sistema di riferimento ad un
altro può essere descritta con almeno 3 quantità linearmente indipendenti. Lo svantaggio principale che
si incontra nell’adottare il minimo numero di parametri indipendenti è l’esistenza di una posizione
reciproca che può essere descritta da più terne. Tali singolarità si riscontrano negli angoli di Eulero,
Cardano e Bryant. Impiegando più parametri, ad esempio una quaterna (la più diffusa è il quaternione)
si evita tale inconveniente, tuttavia il numero di variabili è maggiore e il loro significato è meno intuitivo.
1.7 I principali parametri di assetto ternari
Fig 1.7.1: rotazione elementare
Per mostrare che la moltiplicazione per una matrice ortogonale ha il significato di una rotazione,
consideriamo il caso di figura 1.7.1. I sistemi di riferimento (x1, y1, z1) e (x2, y2, z2) hanno gli assi delle
quote coincidenti e i rimanenti separati da una distanza angolare α. Un generico vettore v che giaccia
nel piano x1Oy1 può essere descritto in termini dei due sistemi di riferimento, e le relazioni tra le due
forme si ricavano facilmente con relazioni trigonometriche:
α
α
α
26
α
(1.7.1)
_____________________________________________________ I principali parametri di assetto ternari
In forma matriciale si ottiene
α
α
α
α
(1.7.2)
O, in forma compatta,
(1.7.3)
La matrice di trasformazione, chiaramente ortogonale, è detta matrice di rotazione elementare.
Si applichi ora un’ulteriore rotazione generica del sistema di riferimento di pedice 2, ottenendone un
terzo; per il vettore v, espresso rispetto alle nuove coordinate, vale una relazione analoga alla
precedente (1.7.3): v3 = L32v2. Per le proprietà dell’algebra matriciale, la matrice di rotazione dal primo
all’ultimo sistema di riferimento vale L31 = L32·L21 , e si ricorda che il prodotto matriciale non è
commutativo. Una successione di tre rotazioni, ciascuna con un asse cartesiano fisso, è alla base della
descrizione dell’assetto di un corpo rigido rispetto al sistema di riferimento ℱI. I tre spostamenti angolari
portano gli assi del sistema ℱI a coincidere con quelli di ℱB, e la loro entità, raccolta in una terna,
descrive l’orientamento del corpo nello spazio. A seconda della sequenza di spostamenti angolari
compiuti si hanno parametri diversi; ciascuna rotazione nel seguito è indicata con l’asse che resta fisso.
La notazione più diffusa è quella degli angoli di Eulero, che prevede una sequenza di rotazioni nella
successione 3-1-3. Se ne ricava ora la matrice di rotazione, con l’aiuto di figura 1.7.2.
Fig 1.7.2: sequenza di rotazioni degli angoli di Eulero
La procedura di rotazione è descritta schematicamente nella tabella seguente. Ad ogni passo è
evidenziato l’asse di rotazione ed il relativo angolo di Eulero. La terna va letta da sinistra a destra, e ad
ogni passo è riportata, se si verifica, la sovrapposizione col versore del passo precedente.
27
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
step
1
2
3
versore
Ψ, angolo di
precessione
Θ, a. di
nutazione
Φ, a. di
rotazione
E1
E2
E3
e1'
e2'
e3' ≡ E3
e1'' ≡ e1'
e2''
e3'' ≡ e3
e1
e2
e3
Si riportano, in forma matriciale, le relazioni geometriche che permettono di ricavare le matrici di
rotazione per ciascun passo.
1)
(1.7.4)
2)
(1.7.5)
3)
(1.7.6)
Le tre matrici di rotazione sono perciò:
(1.7.7)
(1.7.8)
(1.7.9)
La trasformazione completa si ottiene effettuando due prodotti matriciali:
(1.7.10)
28
_____________________________________________________ I principali parametri di assetto ternari
Per quella inversa basta invertire la matrice completa:
(1.7.11)
La sequenza di rotazioni 3 - 2 - 1 riguarda gli angoli di Bryant. Sono largamente utilizzati nella meccanica
del volo atmosferica e spaziale, per descrivere l’assetto del veicolo rispetto al sistema di riferimento
LHLV (Local Horizontal – Local Vertical). Gli angoli originati dai tre spostamenti sono, nell’ordine, l’angolo
di imbardata ψ, l’angolo di beccheggio θ e l’angolo di rollio ϕ. Le tre matrici di rotazione e la matrice
complessiva sono riportate nel seguito.
ψ
ψ
ψ
ψ
ψ
θ
θ
θ
(1.7.13)
θ
ϕ
ϕ
θ
θ
θ
ϕ
ϕ
ϕ
θ
ψ
ψ
ϕ
ψ
ϕ
(1.7.12)
ψ
ψ
ϕ
ϕ
θ
θ
ϕ
ϕ
θ
ψ
ψ
(1.7.14)
ψ
θ
ϕ
ϕ
ψ
ψ
ϕ
ϕ
θ
θ
(1.7.15)
Gli angoli di Cardano si riferiscono invece alla sequenza di rotazioni 1-2-3. Già da queste relazioni si nota
la singolarità discussa precedentemente. Per gli angoli di Eulero, un comportamento anomalo si ha nel
caso che l’angolo sia nullo. In tal caso la prima e l’ultima rotazione avvengono intorno allo stesso asse
E3; con ciò, ogni terna ( , 0, ) per cui
+
è costante rappresenta la stessa rotazione di assi
coordinati. Lo stesso succede con gli angoli di Bryant per θ = ±π/2: in questo caso tutte le terne del tipo
(ψ, ±π/2, ϕ) per le quali ψ - ϕ è costante sono singolari. Altre spiacevoli conseguenze si possono notare
nelle equazioni evolutive, ad esempio, degli angoli di Eulero.
La velocità angolare si può esprimere nelle due forme alternative
ω
ω
ω
(1.7.16)
Le componenti di E3 rispetto agli assi corpo sono contenute nella terza colonna della matrice LBI (1.7.10),
quelle di e1’ nella prima colonna della 1.7.9. Sostituendo si trova
(1.7.17)
In forma matriciale,
29
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
ω
ω
ω
(1.7.18)
Che invertita dà le equazioni evolutive della terna ( , θ,
):
ω
ω
ω
(1.7.19)
Che in forma esplicita diventano
ω
ω
ω
ω
(1.7.20)
Una volta noto il vettore velocità angolare ω, le 1.7.20 si possono integrare per ottenere l’andamento
dei tre angoli di Eulero. La singolarità produce un infinito negli angoli di precessione e rotazione, quando
l’angolo di nutazione è nullo.
Procedendo analogamente si possono ricavare le equazioni differenziali per gli angoli di Bryant:
ω
ω
ω
ϕ
ϕ
ϕ
θ
ψ
ω
ω
ω
ϕ
ϕ ω
ϕ
θ
θ
ϕ
ϕ
ϕ
ϕ
θ
ψ
(1.7.21)
θ
ϕ
ϕ
(1.7.22)
Anche in questo caso, per θ = ±π/2 le derivate del rollio e dell’imbardata tendono ad infinito.
1.8 I principali parametri di assetto quaternari
Le singolarità si possono evitare ricorrendo ad uno strumento matematico più elegante della
successione di rotazioni elementari, il cosiddetto teorema dell’autoasse della rotazione di Eulero. Data
una generica rotazione di sistemi di riferimento da ℱI ad ℱB, esiste sempre una direzione, identificata da
un opportuno versore a, che non varia, cioè i cui coseni direttori sono invariati. Ciò è conseguenza del
fatto che ogni matrice reale ortogonale ha almeno un autovalore unitario. Grazie a tale risultato, la
trasformazione ℱI → ℱB si può immaginare semplicemente come una rotazione del sistema di
riferimento ℱI attorno all’autoasse di versore a, di un opportuno angolo α. L’autoasse, o asse di
rotazione di Eulero, ha la seguente forma:
(1.8.1)
30
__________________________________________________ I principali parametri di assetto quaternari
Si può ricavare la matrice di rotazione per la trasformazione diretta:
α
α
α
α
α
α
α
α
α
α
α
α
α
α
α
α
α
(1.8.2)
α
I quaternioni o parametri di Eulero sono così definiti:
α
α
(1.8.3)
α
α
In genere gli ultimi tre si rappresentano in forma vettoriale:
α
(1.8.4)
E tutti insieme con la notazione
,
α
,
α
,
α
,
α
(1.8.5)
La matrice di trasformazione si può scrivere in funzione dei quaternioni:
(1.8.6)
Dove la matrice è la matrice equivalente del prodotto vettoriale, tale che, dato un generico vettore b,
valga q b = b, e vale:
(1.8.7)
Si noti che le componenti dei quaternioni non sono indipendenti tra loro, dovendo soddisfare la
relazione
(1.8.8)
Si esaminano ora alcune proprietà elementari dell’algebra dei quaternioni. Il quaternione unitario QI =
(1,0,0,0)T rappresenta il sistema di riferimento di partenza, nel caso di interesse ℱI. Il quaternione
coniugato Q* = (q0, -qT)T è definito come il quaternione con parte vettoriale opposta a quello generico Q,
che rappresenta una rotazione α intorno all’autoasse a. Q* rappresenta invece la rotazione dello stesso
angolo α intorno all’autoasse opposto -a, oppure la rotazione in senso opposto –α intorno allo stesso
autoasse a. Naturalmente, l’assetto ottenuto tramite una rotazione attorno all’asse di versore a
dell’angolo α, indicata nel seguito con (α, a), è identico ad una rotazione (-α, -a) effettuata dallo stesso
31
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
sistema di riferimento iniziale. Ad esempio, un analogo del quaternione Q è –Q = (-1, 0, 0, 0)T. Noto il
quaternione Q = (q0, q1, q2, q3) = (q0, q) è possibile calcolare l’autoasse a e l’angolo di rotazione α:
(1.8.8)
α
(1.8.9)
È possibile definire un’operazione di prodotto tra quaternioni con un significato fisico-geometrico
intuitivo. Dati due quaternioni generici Q = (q0, q) e P = (p0, p) che portano, nell’ordine, dal sistema di
riferimento ℱ1 ad ℱ2 e poi ad ℱ3, il loro prodotto R = QP = (r0, r) rappresenta direttamente la transizione
ℱ1 → ℱ3. La parte scalare e vettoriale sono date da:
(1.8.10)
(1.8.11)
L’autoasse c e l’angolo di rotazione γ di R sono facilmente ottenibili utilizzando le 1.8.8, 9. É facile
mostrare che tale operatore non è commutativo ma gode della proprietà associativa. Valgono inoltre le
due seguenti proprietà:
(1.8.12)
(1.8.13)
Come per gli angoli di Eulero, l’evoluzione dei quaternioni è descritta da un sistema di equazioni
differenziali lineari
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
(1.8.14)
ω
Che in forma matriciale diventa
(1.8.15)
(1.8.16)
I quaternioni offrono alcuni vantaggi rispetto agli angoli di Eulero, di Cardano o di Bryant, il primo senza
dubbio è la mancanza di singolarità; la loro equazione evolutiva inoltre (1.8.14) è più semplice da
integrare. Tuttavia non sono intuitivi come le altre terne di angoli, e comportano più calcoli essendo una
quaterna.
Una rappresentazione in terne che deriva dai parametri di Eulero il cosiddetto vettore di Gibbs,
composto da parametri di Gibbs o di Rodrigues:
32
__________________________________________________ I principali parametri di assetto quaternari
α
,
,
(1.8.17)
La singolarità si verifica per α = ±π, angolo per il quale i valori diventano infiniti.
1.9 Le equazioni di Eulero
Le equazioni che governano il moto angolare del satellite sotto l’azione di momenti esterni, le equazioni
dette di Eulero, non sono altro che un risultato della seconda legge della dinamica applicata ad un corpo
rigido. Prima di ricavarle, si richiamano alcuni utili concetti dalla Meccanica.
Si considerino, dato il satellite e la sua traiettoria, il sistema di riferimento inerziale rispetto alla Terra ℱI
di versori (E1, E2, E3) e quello solidale al corpo, ℱB, di versori (e1, e2, e3). Dato un vettore v, di componenti
(X, Y, Z) ed (x, y, z), rispettivamente nel sistema di riferimento ℱI ed ℱB, la sua derivata in componenti
del primo sistema è:
(1.9.1)
In componenti degli assi corpo vale:
(1.9.2)
Il tensore d’inerzia I di un corpo è una matrice simmetrica definita positiva:
(1.9.3)
Che contiene i momenti d’inerzia rispetto ai tre assi corpo:
(1.9.4)
(1.9.5)
(1.9.6)
Ed i prodotti d’inerzia:
(1.9.7)
33
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
(1.9.8)
(1.9.9)
La definizione positiva del tensore d’inerzia implica che i suoi autovalori sono tutti reali, con autovettori
ortogonali. Esiste perciò una particolare terna di assi corpo ℱB’ che la diagonalizza, i cui assi sono
chiamati assi principali d’inerzia; se si incontrano nel centro di massa del corpo, sono chiamati anche
principali.
(1.9.10)
Gli autovalori sono chiamati momenti d’inerzia principali
Il vettore momento angolare per un corpo continuo è dato da:
(1.9.11)
Con v velocità di un generico punto del corpo rigido nel sistema ℱB.
In assi corpo, sussiste una semplice relazione tra queste grandezze:
(1.9.12)
L’energia cinetica è data dall’integrale:
(1.9.13)
Ora si può specializzare la seconda legge della dinamica per un corpo rigido soggetto a momenti esterni
di risultante M:
(1.9.14)
Esprimendola in componenti degli assi corpo
(1.9.15)
E supponendo tensore d’inerzia costante si ottiene:
(1.9.16)
Se gli assi corpo coincidono con quelli principali d’inerzia, il tensore d’inerzia è diagonalizzato e si
perviene alle equazioni di Eulero.
34
__________________________________________________________________ Le equazioni di Eulero
ω
ω
ω ω
ω ω
ω
ω ω
(1.9.17)
Note le azioni esterne, l’integrazione di questo sistema di equazioni differenziali del prim’ordine
permette di ottenere l’andamento delle componenti della velocità angolare nel tempo. A loro volta, le
soluzioni si possono utilizzare per determinare la variazione temporale dei parametri d’assetto, siano
essi angoli di Eulero o quaternioni.
La soluzione nel caso di equazioni omogenee è particolarmente semplice. Senza perdere di generalità, si
può supporre Jx > Jy > Jz.
ω
ω
ω ω
ω ω
ω
ω ω
(1.9.18)
Il vettore momento angolare ha modulo costante, in entrambi i sistemi di riferimento:
ω
ω
ω ω
ω
(1.9.19)
ω ω
ω ω
(1.9.20)
ω ω ω
Geometricamente, la velocità angolare deve giacere su di un ellissoide, detto ellissoide del momento
angolare, che ha in ℱB l’equazione
ω
ω
ω
(1.9.21)
Anche l’energia cinetica è costante:
ω
ω ω
ω ω
ω
ω
(1.9.22)
ω ω
ω ω ω
(1.9.23)
La velocità angolare deve giacere anche sull’ellissoide dell’energia cinetica, o di Poinsot, che ha
equazione in ℱB:
ω
ω
ω
35
(1.9.24)
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
L’intersezione tra le due quadriche, la curva dove giace l’estremo del vettore velocità angolare, è
chiamata in inglese polhode.
1.10
Il controllo d’assetto
In generale, il controllo dell’assetto di un satellite può essere effettuato in modo passivo od attivo. Il
primo è il più semplice, affidabile ed economico, e consiste nel conferire una velocità angolare intorno
ad un asse di simmetria con una manovra detta di spin up. Il momento angolare accumulato fornisce la
stabilità giroscopica che contrasta i momenti esterni, tuttavia vi sono alcuni svantaggi dovuti alla
rotazione continua: per consentire una generazione di energia efficiente l’intera superficie del veicolo
deve essere rivestita di celle solari, inoltre alcuni payload hanno bisogno di controllare la direzione di più
assi durante la missione.
Per garantire la possibilità ad AraMiS di ospitare qualsiasi tipo di payload, ad una soluzione del genere è
stato preferito un tipo di controllo attivo. Ciò significa che la terna di assi corpo ha direzione fissa nel
tempo, ed il satellite è stabilizzato, ad esempio, tramite propulsori, ruote d’inerzia o magneto-torquers.
La complessità dei sottosistemi aumenta notevolmente rispetto a prima, causando un aumento dei costi
ed una riduzione dell’aspettativa di vita del sistema. Il controllo attivo si può effettuare in anello aperto,
più semplice ma meno accurato, oppure chiuso, di maggiore complessità ed accuratezza.
Dal momento che in questa sede interessano le prestazioni del sottosistema propulsivo, si tralasceranno
gli altri attuatori del sistema di controllo d’assetto ed orbita (AOCS, Attitude and Orbit Control System),
e si effettuerà una valutazione delle caratteristiche del sistema con controllo ad anello aperto.
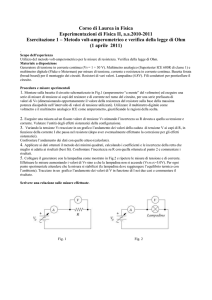
Fig 1.10.1: manovra di rotazione ideale
La manovra che verrà studiata al capitolo 3 presenta le seguenti fasi, illustrate nel grafico nello spazio
delle fasi di figura 1.10.1. 1) L’accelerazione iniziale conferisce al satellite la velocità angolare desiderata
; 2) segue una fase di deriva, durante la quale i propulsori non sono azionati; 3) ed infine, ad un
opportuno istante, una seconda accensione provoca una decelerazione che arresta il satellite. La
particolare configurazione scelta per i propulsori, una coppia per ogni tile, permette di organizzare le
36
___________________________________________________________________ Il controllo d’assetto
accensioni sincronizzate in modo da esercitare una coppia pura, con risultante delle forze nulla, e quindi
di disaccoppiare il controllo d’assetto e quello orbitale, almeno in prima approssimazione (si veda figura
1.10.2). Il momento risultante, dati la forza F ed il braccio l, vale M = 2Fl. Si analizza ora la dinamica della
fasi accelerate.
Fig 1.10.2: diagramma delle forze della rotazione ideale
Si consideri di nuovo l’equazione di Eulero nel caso di momento d’inerzia costante nel tempo:
(1.10.1)
(1.10.2)
Valida nel caso che non vi siano parti interne in movimento. Assumendo che la rotazione sia lenta, cioè
che
, il secondo termine a primo membro si può trascurare, e si ottiene:
(1.10.3)
Raccogliendo gli spostamenti angolari dei tre assi corpo nel vettore θ
θ , θ , θ , la precedente forma lineare diventa:
(θ1, θ2, θ3), la cui derivata è
(1.10.4)
Nel caso che la terna di assi corpo sia anche principale d’inerzia, il tensore d’inerzia è diagonalizzato e le
tre equazioni scalari sono indipendenti tra loro:
θ
,
, ,
(1.10.5)
Dalla Meccanica è anche noto che, per rotazioni intorno ad un singolo asse, si ottiene un’equazione,
esatta, analoga alla precedente 1.10.5, con grandezze riferite all’asse di rotazione. Si esaminano nel
seguito le caratteristiche di una rotazione intorno ad un singolo asse.
Si consideri un cubo con distribuzione di densità omogenea, una delle possibili configurazioni di AraMiS,
sul quale agisce un momento costante attorno ad un suo asse principale d’inerzia. La conseguente
accelerazione angolare varrà
α
θ
(1.10.6)
37
I principali concetti dell’astrodinamica e del controllo d’assetto _________________________________
Per ottenere gli andamenti temporali di velocità e posizione angolare, è sufficiente integrare la
precedente equazione tenendo conto delle condizioni iniziali θ(t0)
θ0, θ
θ . Si elimina, per
brevità di notazione, il pedice i.
θ
θ
α
θ
θ
θ
(1.10.7)
α
(1.10.8)
Si può anche effettuare un’integrazione nello spazio delle fasi (θ, θ). Applicando il concetto di derivata di
una funzione composta all’accelerazione angolare si ha:
θ θ
θ
θ
θ
θ θ
θ
θ
θ
θ
θ
α θ
α θ
θ
(1.10.9)
α θ
(1.10.10)
θ
(1.10.11)
θ
(1.10.12)
Supponendo d’ora in avanti condizioni iniziali nulle si ottiene:
θ
αθ
(1.10.13)
Si passa ora all’analisi delle tre fasi della manovra, di cui si ricava la relativa durata ti e la distanza
angolare percorsa θi, per poi calcolare tempo e angolo percorso totali. Nel capitolo 3, queste grandezze
dinamiche verranno utilizzate per calcolare parametri prestazionali come il consumo di propellente e di
energia elettrica.
1) La durata temporale della prima fase può essere facilmente calcolata dalla definizione di
accelerazione angolare, nel caso che sia costante, e sfruttando la 1.10.6:
θ
α
θ
θ
θ
(1.10.14)
Dove nell’ultimo passaggio si è esplicitato il momento d’inerzia di un cubo omogeneo di lato L e
massa m. L’angolo percorso si ottiene facilmente dalla legge oraria 1.10.8 con condizioni iniziali
nulle:
θ
θ
α
α
38
(1.10.15)
___________________________________________________________________ Il controllo d’assetto
2) La fase di deriva (drift) è caratterizzata da velocità angolare costante θ . Il tempo di drift si può
ottenere per sottrazione dal tempo totale T di manovra, una volta note le durate delle altre due
fasi:
θ
(1.10.16)
θ
E θ2 si ricava facilmente, essendo il moto circolare uniforme
θ
θ
(1.10.17)
3) La decelerazione, essendo perfettamente simmetrica alla fase di accelerazione, almeno nel caso
ideale, ne ha la stessa durata temporale e angolare.
(1.10.18)
θ
θ
(1.10.19)
La durata complessiva e la distanza angolare percorsa valgono perciò
θ
α
θ
θ
θ
θ
θ
θ
α
θ
θ
θ
θ
(1.10.20)
θ
θ
α
θ
θ
θ
α
(1.10.21)
Nel limite per cui il tempo di drift sia nullo, θ2=0, la durata della manovra si riduce a
θ
α
θ
α
Dove l’ultima uguaglianza è stata ricavata dalla precedente 1.10.21 annullando il termine di θ2.
39
(1.10.22)
40
________________________________________________________________ Le relazioni fondamentali
Capitolo 2
2 I principali concetti di propulsione elettrica
Il sottosistema propulsivo di un satellite è in genere sviluppato ed integrato allo scopo di permettere il
controllo di assetto ed orbita del veicolo spaziale durante la sua vita operativa, costituendo uno dei
principali attuatori del sistema AOCS (Attitude and Orbit Control System); altri organi attuatori, ad
esempio ruote d’inerzia e bobine magnetiche, sono adottati da AraMiS. Tuttavia con il termine
“propulsore” si vuole intendere una macchina capace di imprimere una forza, la spinta, tramite
l’accelerazione di materia (propellente sottoposto a trasformazioni fisico-chimiche) in senso opposto al
verso del moto desiderato, in accordo con la terza legge di Newton.
2.1 Le relazioni fondamentali
Risulta vantaggioso introdurre preliminarmente una serie di grandezze ed equazioni che descrivono le
prestazioni dei sistemi propulsivi. In generale, qualunque tipo di sistema produce una spinta, T,
espellendo una certa portata in massa di propellente, , a una velocità costante c. Si consideri un corpo
sottoposto alla sola azione propulsiva: in un istante dt viene espulsa una quantità di massa infinitesima
, con una velocità assoluta pari a c - v, dove v è la velocità del corpo.
v
dmP
v + dv
c-v
m – dmP
m
T
t
T
t +dt
Fig 2.1.1: analisi infinitesimale della dinamica di un corpo propulso
41
I principali concetti di propulsione elettrica _________________________________________________
Applicando la conservazione della quantità di moto alla massa infinitesima espulsa dmP, uguale alla
variazione di massa del corpo si ottiene l’equazione per la spinta
(2.1.1)
Dove Q è la portata in volume di propellente elaborata, e ρ la sua densità di massa. Difficilmente da un
sottosistema propulsivo è possibile ottenere una portata esattamente costante, perciò il simbolo Q,
come gli altri parametri che verranno introdotti, è da intendere come una grandezza mediata sul tempo
di azionamento.
Osservando che la massa espulsa è uguale alla diminuzione di massa del corpo, dm P = -dm, si ottiene,
differenziando,
(2.1.2)
E dalla 2.1.1 si trova la relazione differenziale
(2.1.3)
Che integrata nel tempo dà l’equazione di Tsiolkovsky, supponendo che la velocità c sia costante.
(2.1.4)
In realtà l’espressione fornita in precedenza (0.1) riguarda il caso più generale di propulsore dotato di un
ugello di scarico. In tal caso la spinta assume la forma
, dove Ae è l’area della
sezione finale dell’ugello, pe la sua pressione e pa è la pressione dell’ambiente di valle, nulla in ambiente
spaziale. La velocità equivalente ve tiene conto anche dell’ultimo termine, la pressure thrust, essendo
. Nel caso di ugello adattato o per pressioni trascurabili la pressure thrust si
annulla, e la velocità ve coincide con c.
Considerando una manovra durante la quale sia stata consumata, espellendola, la massa mp = mi - mf di
propellente, si giunge facilmente a forme alternative dell’equazione del razzo:
(2.1.5)
Se ne può fornire anche un’espressione approssimata, senza funzioni trascendenti, nel caso che il
rapporto mp/mf sia sufficientemente vicino a 0, ad esempio quando la massa espulsa m p risulta
particolarmente ridotta. Introducendo un’espansione in serie di MacLaurin arrestata al prim’ordine della
funzione logaritmo naturale si ottiene:
(2.1.6)
La potenza utile sviluppata si calcola come
42
________________________________________________________________ Le relazioni fondamentali
(2.1.7)
Poiché generalmente il propellente ha energia trascurabile all’ingresso nel propulsore, rispetto allo stato
finale.
Altre quantità rilevanti ottenibili per integrazione sono: la massa totale di propellente consumato tra
due istanti to e tf:
(2.1.8)
E l’impulso totale tra i due istanti to e tf, che si suppone esistere finito:
(2.1.9)
Molto spesso si utilizza l’impulso totale rapportato al peso di propellente elaborato, ossia l’impulso
specifico Isp:
(2.1.10)
Dove g0 è il valore convenzionale dell’accelerazione di gravità sulla superficie terrestre, di circa 9,806
m/s2. Nei calcoli di prestazioni si immaginano spinta e portata in massa costanti, per cui l’impulso
specifico assume una forma semplificata:
(2.1.11)
Con l’ultima eguaglianza ottenuta grazie all’equazione della spinta (2.1.1). Ora si può notare
chiaramente il significato di misura del consumo di propellente dell’impulso specifico (2.1.10); il quale è
anche sinonimo della velocità di scarico c, in quanto essa viene solamente rapportata alla costante g0,
assumendo le dimensioni di un tempo.
L’efficienza energetica del propulsore si esprime col rapporto tra potenza utile e potenza in ingresso:
(2.1.12)
Dove l’ultima uguaglianza è stata ricavata dalla definizione di potenza utile (2.1.7).
Le equazioni poste descrivono un sistema propulsivo generico. Passando ai propulsori elettrostatici, che
accelerano il propellente ionizzato, in primo luogo si può associare un flusso di cariche alla portata in
massa elaborata, ossia una corrente I
(2.1.13)
43
I principali concetti di propulsione elettrica _________________________________________________
Dove la quantità q/m è detta rapporto carica-massa e dipende dal propellente scelto e dalla
completezza della ionizzazione, tramite il regime fluidodinamico di lavoro.
Inoltre si può specializzare l’espressione dell’impulso specifico (2.1.11) valutando la velocità di uscita c.
Supponendo dissipazioni trascurabili, l’equazione della conservazione dell’energia applicata ad uno ione
con velocità iniziale pressoché nulla, immerso in un campo elettrostatico caratterizzato dalla tensione V
tra i due estremi del calcolo, fornisce
(2.1.14)
Naturalmente, per espellere la particella nello spazio, se la carica q è positiva la tensione V dovrà essere
positiva e viceversa.
Di conseguenza l’impulso specifico diventa
(2.1.15)
Il rendimento si può specializzare tenendo conto della potenza in entrata:
(2.1.16)
È importante notare come dipenda dal quadrato dell’impulso specifico e dall’inverso del rapporto
carica-massa. La (2.1.16), appena posta, permette di modificare leggermente l’espressione di base
dell’impulso specifico (2.1.15):
(2.1.17)
Portando a considerare anche le perdite nella conservazione dell’energia (2.1.14), trascurate in prima
approssimazione. Un tipico grafico per la spinta e l’impulso specifico di un propulsore elettrico è
riportato in fig. 2.1.2.
44
________________________________________________________________ Le relazioni fondamentali
Fig 2.1.2: tipiche prestazioni di un propulsore elettrico a potenza fissatata
In caso di configurazione a più propulsori elettrici alimentati con lo stesso propellente, si può affermare
che spinta, corrente e portata in massa siano sommative: per gli N propulsori, che sviluppano ciascuno
una spinta Ti, una corrente Ii,una portata in massa , in genere tutte uniformi, sussistono le
(2.1.18)
(2.1.19)
(2.1. 20)
Se tutte le unità sono in parallelo, la tensione loro applicata è costantemente V, perciò la velocità di
scarico c è uniforme, come l’impulso specifico ed il rendimento, e la spinta diventa
. La
potenza utile assume invece la forma, analoga alla precedente (2.1.7):
,
(2.1.21)
,
L’impulso specifico complessivo coincide con quello individuale:
,
,
(2.1.22)
Esprimendo il rendimento totale come:
,
,
,
45
(2.1.23)
I principali concetti di propulsione elettrica _________________________________________________
Ci si accorge che coincide anch’esso con quello delle singole unità; si poteva giungere allo stesso
risultato anche osservando che impulso specifico, tensione e rapporto carica-massa totali coincidono
con i rispettivi valori individuali. Spinta, portata in massa e corrente, nelle intenzioni del progettista,
sono uniformi per garantire un’azione propulsiva simmetrica, tuttavia nella realtà possono differire
leggermente una dall’altra. Ciò nonostante, è possibile usare le stesse espressioni con i valori medi.
Il consumo di propellente (2.1.8) rimane invariato se si considera la portata totale e così l’equazione del
razzo (2.1.5).
Le prestazioni tipiche delle principali categorie di propulsori sono raccolte nella tabella seguente.
La categoria dei propulsori elettrici, rispetto a quelli tradizionali, realizza i più alti impulsi specifici e si
colloca nella fascia medio-alta di rendimenti. Per quanto riguarda i livelli di spinta, mentre i propulsori
chimici garantiscono fino a 107 Newton, ma ad impulsi specifici di solo alcune centinaia di secondi, quelli
elettrici generalmente sviluppano pochi Newton ad impulsi specifici ben più elevati, intorno al migliaio
di secondi. Per la trattazione precedente risulta chiaro che tali prestazioni, e quelle elencate nel seguito,
dipendono l’una dall’altra (ad esempio l’impulso specifico dal rendimento e la spinta da potenza in
ingresso e rendimento) e perciò non costituiscono dati di validità assoluta, ma relativa alle abituali
condizioni di funzionamento. Nel prossimo paragrafo si esaminano più in dettaglio i principali tipi di
propulsori elettrici.
2.2 I principali tipi di propulsori elettrici
I principali tipi di propulsori elettrici appartengono a tre famiglie: elettrotermici, elettromagnetici ed
elettrostatici.
La prima categoria comprende i resistojet (in figura 2.2.1) e gli arcjet. Entrambi scaldano il propellente,
che è in seguito indirizzato verso un ugello di scarico comunicante con l’ambiente esterno. Nel primo
caso la cessione di calore avviene grazie al passaggio del fluido propulsivo o attraverso una camera o
intorno ad un singolo elemento, riscaldati con una resistenza elettrica, e produce un aumento della
46
_______________________________________________________ I principali tipi di propulsori elettrici
velocità di scarico; tale soluzione ricorda molto i metodi chimici di
accelerazione del propellente, infatti gli impulsi specifici ottenibili
sono i più bassi per la categoria elettrica e più vicini alla
tradizionale, essendo al di sotto dei 500 s. Leggermente
differente è la sorte di un fluido in un arcjet, nel quale il
riscaldamento è realizzato con un arco elettrico a elevata
corrente direttamente nel flusso, il che ne causa una leggera
ionizzazione, dando luogo a un blando plasma. Si riscontrano
leggeri benefici nell’impulso specifico, che può raggiungere i 700
s, ma che rimane comunque limitato dal processo di
riscaldamento. Le spinte
Fig 2.2.1: resistojet MR-502
per entrambi i tipi sono
tra i decimi di Newton
ed il Newton.
Nel tipo elettromagnetico si trovano i propulsori pulsati a
plasma (PPT, pulsed plasma thrusters, in figura 2.2.2) e i
propulsori
magnetoplasmadinamici
(MPD,
MagnetoPlasmaDynamic
thrusters,
ancora
a
livello
sperimentale). Nel primo caso un arco elettrico pulsato ionizza
una frazione di propellente solido e ne accelera i prodotti.
Modulando la frequenza delle scariche elettriche si può variare
il livello di spinta. Nel secondo caso ancora un arco elettrico
ionizza una parte di propellente e il plasma viene poi accelerato
con forze di Lorentz. Siccome il plasma genera sia correnti sia
campi magnetici, gli MPD dovrebbero operare ad alte potenze
che garantiscono alti impulsi specifici (dai 2000 ai 5000 s) e Fig 2.2.2: veicolo spaziale EO-1 con PPT
considerevoli livelli di spinta, sulle decine di Newton.
La famiglia di propulsori
elettrostatici include quelli ionici (di cui un esempio è riportato in
figura 2.2.3), i propulsori ad effetto Hall, i FEEP e gli electrospray. I
primi due generano, in vari modi, plasma a partire dal propellente, da
cui si estraggono elettrostaticamente ioni con griglie sotto tensione
intorno alla decina di kilovolt, che li accelerano ad elevate velocità.
Dalla 2.1.15 si deduce che l’impulso specifico è tra i più elevati della
categoria, trovandosi tra i 2000 ed i 10000 s; anche i rendimenti sono
tra i più alti, dal 60% a più dell’80%. Un particolare metodo di
generazione del plasma prevede lo sfruttamento dell’effetto Hall, da
cui è derivato il nome del tipo di propulsore. Le ultime due tipologie
condividono alcuni aspetti: i FEEP (Field Emission Electric Propulsion)
Fig 2.2.3: propulsore ionico NEXIS trasportano il propellente (un metallo allo stato liquido) lungo piccoli
capillari alle cui estremità sono estratti gli ioni per mezzo di processi
di emissione di campo, gli electrospray estraggono ioni o particelle
cariche a partire da una soluzione ionica e le accelerano grazie ad un campo elettrostatico, stabilito tra
l’estremità del capillare e uno o più elettrodi con fori allineati alle estremità dei condotti. Le espressioni
ricavate precedentemente, a partire dalla formula per la velocità c (2.1.14), eccetto le 2.1.18-20, che
47
I principali concetti di propulsione elettrica _________________________________________________
valgono in generale, descrivono questo tipo di propulsori. Per la bassa spinta prodotta (intorno al
micronewton), questa soluzione è preferita se si necessita di un controllo d’assetto accurato e se si
dispone di un satellite di massa non elevata, come per AraMiS, nanosatellite la cui configurazione
dipende dal payload e quindi dal tipo di missione, ma che non supera i 10 kg. In ogni caso gli impulsi
specifici rimangono alti, sull’ordine dei 6000 s, come i rendimenti, intorno all’80%.
Tali sistemi rivestono un particolare interesse in quest’epoca, caratterizzata dalla miniaturizzazione dei
componenti spaziali e dal conseguente perfezionamento dei sistemi MEMS (Micro-Electro-Mechanical
Systems). Mentre le missioni spaziali richiedono obiettivi vieppiù articolati e complessi, è sempre più
arduo incorporare crescenti livelli di complessità in sottosistemi compatti; specialmente il sottosistema
propulsivo deve poter garantire la manovrabilità necessaria ad alcune delle più promettenti applicazioni,
come voli in formazione, puntamento accurato, mantenimento e modifica dell’orbita.
Il modo più comune e conveniente di progettare un MEMS è semplice nel concetto: ridurre con un
opportuno rapporto di scala le dimensioni di tutte le componenti, mantenendo le prestazioni originali. Si
esigono però poche componenti ausiliare, difficili da miniaturizzare, bassi consumi di propellente e
ridotte temperature, poiché dimensioni minori comportano maggiori flussi di calore e quindi strutture di
dissipazione maggiorate; un propulsore electrospray, rispettando questi requisiti, ben si presta a
diventare un MEMS. Ad esempio, le portate coinvolte sono talmente basse (centinaia di nanolitri al
secondo) da non richiedere componenti come pompe o valvole, che comunque sarebbero difficili da
microfabbricare; l’alimentazione è garantita dalle forze di capillarità che agiscono nel serbatoio. Per
ottenere una spinta adeguata alle necessità di missione spesso si raggruppano più unità propulsive in
fitti array, il che rappresenta una sfida sia dal punto di vista della microfabbricazione, affrontata per iEPS
con tecniche avanzate all’acquaforte, sia per la struttura del campo elettrostatico. Il grafico di figura
2.1.2 è riferito ad un singolo emettitore di un propulsore FEEP. Alternative valide come sistemi MEMS
sono i cold-gas jets, poco efficienti e perciò adatti a missioni che richiedono bassi aumenti di velocità, e,
tra i propulsori elettrici, quelli al plasma, le cui prestazioni però degradano al diminuire delle dimensioni.
2.3 Il cono di Taylor
È affascinante e suggestiva la storia dell’indagine della struttura elettro-fluidica che è il cuore del
sistema electrospray, il cosiddetto cono di Taylor1 (in figura 2.3.1). Questo studioso infatti, convinto che
il collasso delle gocce d’acqua sotto l’azione di forti campi elettrici rivestisse un ruolo fondamentale
nella formazione dei temporali, fu tra i primi a studiarlo nel 1964, tanto che il suo nome vi è ancora
associato. In seguito, per le sue peculiari caratteristiche, il cono di Taylor fu sfruttato nel campo della
propulsione astronautica, ma la sua capacità di produrre finissime goccioline elettricamente cariche di
sostanze importanti come le biomolecole di grosse dimensioni ha permesso anche un notevole passo
avanti nella spettrometria di massa, e quindi in biologia, chimica e medicina. Il fondamento fisico della
ESMS, ElectroSpray Mass Spectrometry, è valso il premio Nobel per la chimica a John B. Fenn nel 2002.
Tali fatti costituiscono un chiaro invito ad indagare i fenomeni naturali in modo più ampio possibile, se
non altro perché le eventuali ricadute possono rivelarsi tanto imprevedibili quanto utili.
1
Geoffrey Ingram Taylor, 1886-1975, fisico e matematico, esperto di fluidodinamica e teoria delle onde.
48
_______________________________________________________________________ Il cono di Taylor
Quando l’interfaccia tra un liquido, conduttore elettrico, ed un isolante
(vuoto nel presente caso, ma anche aria o un altro fluido) è caricata
elettricamente oltre una certa soglia, diventa instabile e passa da una
forma generalmente arrotondata ad un’altra che comprende una o più
strutture pseudoconiche stabili chiamate coni di Taylor. La perdita di
stabilità può essere facilmente predetta con l’analisi lineare di un liquido
inviscido di conducibilità elettrica infinita applicata ad una superficie piana
sottoposta all’azione della gravità e caricata da un campo elettrico esterno
uniforme, oppure ad una goccia carica in ambiente privo di campi elettrici.
Nel primo caso, l’apparato sperimentale con cui si realizza il campo
elettrico è costituito da un capillare metallico ad una tensione elevata in
modulo (qualche kilovolt, positiva o negativa) accostato ad un elettrodo a
potenziale nullo (si veda figura 2.3.2). Il capillare ospita il fluido, ha
diametro di qualche centinaio di micrometri ed è collegato ad una pompa
Fig 2.3.1: tipico cono di
che mantiene una differenza di pressione tra fluido ed isolante esterno,
Taylor con electrospray
dell’ordine del kPa.
Il cono di Taylor, anche nella sua forma stazionaria qui studiata, ma non è
mai una struttura statica. Il vertice è sempre fonte di emissione di particelle cariche, in una grande
varietà di regimi possibili. La conoscenza del fenomeno è ancora oggi, per la maggior parte, incompleta e
scarsa, ma si è accumulata una considerevole quantità di studi sul regime più semplice ed
apparentemente più utile, il cone-jet. In tali condizioni, un getto stazionario emette continuamente dal
vertice del cono, separandosi poi in uno spray di gocce cariche, chiamato electrospray (ES) (si veda
figura 2.3.2). La discussione seguente avrà come oggetto questa situazione stazionaria, poiché è la più
utile che si conosce, al momento, alla propulsione astronautica. Per fluidi con alta conduttività elettrica
(da 0,001 a 1 S/m), come i propellenti discussi nei prossimi paragrafi, il raggio del getto è al di sotto del
micrometro, e la grande differenza di scala col menisco permette di dividere il problema in due regioni:
un dominio più esterno ed uno interno. Nel primo, idrostatico, di forma conica o pseudo-conica, il fluido
si comporta come un conduttore ideale ed i flussi che vi si
Fig 2.3.2: tipico apparato sperimentale per
indagare un cono di Taylor
possono formare sono lenti ed hanno poca influenza sul
getto; nella regione più interna, dinamica ed a conduttività
finita, si forma il finissimo getto che trasporta una corrente
ed una portata. In particolare l’apice del cono rappresenta
un punto singolare per l’analisi statica: il campo elettrico
avrebbe intensità locale infinita; ciò accade perché nella
realtà avviene in effetti l’emissione, dinamica, di particelle
cariche. Il limite di bassa conduttività elettrica non è
particolarmente interessante. Il getto diventa più spesso e
poco differenziato dal menisco, le due strutture non sono
più nettamente distinte e parametri che non giocavano un
ruolo ad alte conduttività ne influenzano il comportamento
con modalità ancora sconosciute. Nella pratica esistono
comunque molte alternative più semplici per produrre getti
di grandi diametri.
Un comportamento del genere, applicato ai propulsori astronautici, comporta almeno due vantaggi. La
ionizzazione del propellente, che negli altri tipi di propulsori ionici richiede una apposita camera, è
49
I principali concetti di propulsione elettrica _________________________________________________
ottenuta con volumi molto più compatti; inoltre la ridotta dimensione del getto ne aumenta
considerevolmente la velocità, per l’equazione di continuità, permettendo di raggiungere, dopo
un’ulteriore accelerazione elettrostatica, velocità di espulsione dell’ordine di decine di chilometri al
secondo, con chiari benefici sulle prestazioni (paragrafo 2.1). In campo biochimico si utilizzano soluzioni
con solventi altamente volatili, che nel vuoto evaporano permettendo di analizzare biomolecole cariche
ionizzate in modo efficiente.
Passando all’esame della struttura del cono di Taylor stazionario, si può tralasciare la regione del getto,
dinamica, che inizia al suo apice, ed esaminare il problema più esterno. Nonostante la crudele
semplificazione, la soluzione presenta molte caratteristiche riscontrabili nella realtà, come la tensione
minima o di soglia, che innesca il regime cone-jet, importante per comprenderne i limiti di stabilità.
Mostra inoltre i fenomeni di isteresi, e fornisce strumenti per comprendere le proprietà della regione
dinamica. L’equilibrio meccanico al menisco di normale n comporta il bilancio tra salto di pressione
interno ed esterno (Δp), sforzo dovuto alla tensione superficiale γ (γ∇ n) e pressione elettrostatica
(½εε0E2, con ε costante dielettrica relativa dell’isolante ed ε0 costante dielettrica del vuoto,
rispettivamente); inoltre si suppone la superficie equipotenziale in quanto ha conduttività infinita.
(2.3.1)
(2.3.2)
In caso di assenza di cariche nel mezzo isolante e situazione statica, vale la semplice relazione 2.3.2 tra
vettore campo elettrico E, normale al menisco, e potenziale φ. Il termine ∇ n, la curvatura locale,
produce un allungamento della superficie all’aumentare di pressione o campo elettrostatico.
Taylor, nel 1964, descrisse la struttura idrostatica del cono vero e proprio scrivendo il potenziale in
termini della funzione di Legendre frazionaria nel sistema di coordinate sferiche (r,θ) (potenziale di
Taylor). Per un generico punto la coordinata r ne rappresenta la distanza dal vertice del cono e θ
l’anomalia, misurata a partire dal suo asse. Tale soluzione suppone che il salto di pressione sia nullo, Δp
= 0, e prevede una forma esattamente conica con una semiapertura αT = 49,29°. Nonostante abbia
chiarito notevolmente il problema, essa riguarda solo un caso molto particolare ed il potenziale è
singolare sul semiasse θ = π, l’asse del getto, ed aumenta all’infinito all’aumentare della distanza r dal
vertice del cono: la scrittura in termini della funzione di Legendre deve avere dunque un valore locale.
Purtroppo, il range di stabilità del cono di Taylor e l’esistenza di soluzioni multiple ed isteresi sono
intimamente legate alla variabilità di Δp entro un intervallo finito.
Questa struttura può essere controllata attraverso due parametri; comunemente, negli studi
sull’electrospray si variano la tensione e la portata in volume, ma è anche possibile sfruttare la tensione
e la differenza di pressione Δp, che oltre a fornire informazioni di tipo idrostatico, è più semplice da
regolare rispetto a portate in volume di pochi nanolitri al secondo. Il Δp fissa il range di tensioni
necessarie alla stabilità del cono di Taylor e ne influenza la forma. La struttura praticamente conica
associata alla condizione Δp = 0 separa una famiglia di menischi appuntiti, curvati verso l’asse per Δp < 0,
da un’altra categoria di superfici appuntite a forma di ghianda, curvate verso l’esterno, per Δp > 0. La
dizione “cono di Taylor”, che si riferisce a tutte queste configurazioni, non è perciò del tutto corretta,
anche se per convenzione continua ad essere utilizzata. Se per il menisco elettricamente carico
all’estremità di un capillare si cercano numericamente soluzioni idrostatiche con un’estremità conica,
esse rientrano in un intervallo finito di tensioni, ed hanno geometrie diverse al loro variare.
50
_______________________________________________________________________ Il cono di Taylor
L’isteresi è intimamente legata all’esistenza di soluzioni multiple. Se si incrementa la tensione della
superficie, per un certo valore V1 passa da una forma sferica a conica. Tuttavia, se la tensione viene
lentamente ridotta, la forma conica persiste fino ad un valore V0 < V1. Perciò, nell’intervallo V0 < V < V1
esistono almeno due forme stabili. Ciò è compatibile con le soluzioni numeriche poiché il volume del
menisco è libero di variare con la tensione.
Per cercare analiticamente la forma del menisco con un gradiente di pressione, si può espandere il
potenziale di Taylor φ in potenze frazionarie della coordinata polare riscalata ρ = a1r e postulare una
geometria perturbata del cono dalla forma
(2.3.3)
La condizione che la superficie sia equipotenziale e in equilibrio meccanico fissano il salto di pressione e
i valori dei coefficienti dell’espansione. Viene inoltre alla luce l’interessante relazione
γ
,
(2.3.4)
A tutti gli ordini di approssimazione del potenziale φ, il coefficiente a1, legato alla soluzione del
problema, determina completamente il potenziale e la forma del menisco, infatti è legato alla differenza
di pressione adimensionata. A parte un semplice cambiamento di scala di fattore a1, esistono solo tre
geometrie possibili, che corrispondono ai valori -1, 0 ed 1; il caso a1 = 0 è il vero cono di Taylor. In figura
2.3.2 è diagrammata l’equazione 2.3.3 in forma rsinθ - rcosθ, che ne descrive le forme, per i tre valori di
a1 menzionati. Per il grafico a sinistra, a partire dall’alto, si ha: a1 = 1,0,-1; esso tiene conto di 15 termini
dell’equazione 2.3.3. A destra è mostrato l’effetto di una maggior numero di termini, dall’alto in basso:
11, 13, 14 e 15, esclusivamente nel caso a1 = -1.
Fig 2.3.2: forma di coni di Taylor, a sinistra: nei casi a1=1,0,-1, dall’alto in basso, a destra: nel caso a1=-1 con 11,
13, 14 e 15 termini dell’eq. 2.3.4, dall’alto in basso.
Si consideri adesso una goccia di fluido conduttore di carica q1 e raggio R, decrescente a causa
dell’evaporazione. Come per il caso precedente, esiste un raggio critico R1 al quale la forma sferica perde
di stabilità, per la quale vale la relazione detta del limite di Rayleigh1:
1
John William Strutt, terzo barone di Rayleigh, 1842-1919, fisico.
51
I principali concetti di propulsione elettrica _________________________________________________
(2.3.5)
E la goccia esibisce uno o due coni di Taylor con i relativi getti. Per liquidi ad alta conduttività elettrica la
perdita di massa è trascurabile rispetto alla carica emessa (fino al 50%). L’emissione procede fino ad una
carica q0 < q1, alla quale la goccia torna sferica con un raggio finale R2, indistinguibile da R1. Poiché la
carica viene smaltita attraverso i coni, la goccia con estremità appuntite rimane stabile, a volume
praticamente fissato, nel range di cariche q0 < q < q1. Tuttavia, anche una goccia sferica è stabile in
quell’intervallo, perciò vi sono almeno due forme stabili. La situazione comunque non è analoga a prima:
essendo il volume fissato, ora non esiste uno spettro continuo di soluzioni idrostatiche. Probabilmente
la regione dei coni di Taylor si estende fino ad una carica q2 > q1, rimane comunque difficile verificare
sperimentalmente quest’affermazione. Per quanto riguarda il limite inferiore, il flusso di cariche
associato allo spray stabilizza la goccia coi coni di Taylor ad un livello di carica superiore a q0, ma non
inferiore.
Si consideri ora nuovamente la goccia di fluido conduttore, o anche di dielettrico. Quando è soggetta ad
un campo elettrico esterno sufficientemente intenso, diventa instabile e forma estremità appuntite. Nel
caso che non possieda carica, si formano due getti opposti, che eiettano correnti di segno diverso, in
modo da preservare la neutralità elettrica durante il processo; ciò è particolarmente vero per strutture
ad alta conduttività, che perdono poca massa. In caso la carica non sia nulla, inizialmente si forma un
solo getto. La letteratura riguardo a questi processi è ampia, per la sua importanza nelle applicazioni
atmosferiche, come la rottura delle gocce e l’emissione di ioni in atmosfera durante i temporali. Al
momento non ci sono indagini su forme di equilibrio statico in gocce conduttive che mostrino fenomeni
di isteresi.
Il modello a conduttore perfetto consente l’equilibrio del menisco perché le forze che vi agiscono gli
sono perpendicolari, e lo stesso succede per un isolante ideale. Una volta che l’intensità del campo
elettrico supera il valore di soglia al quale la superficie diventa instabile, essa si muove, e la sua
evoluzione si può seguire nel tempo anche con un modello a conduttività infinita. Mentre si può
osservare lo sviluppo di strutture allungate all’estremità del capillare, non c’è prova che con un fluido
ideale possa nascere il getto stabile di particelle cariche. Sperimentalmente si sa d’altro canto che il suo
diametro scala come una potenza negativa della conduttività elettrica: per descrivere tale fenomeno è
indispensabile ricorrere ad un modello per il trasferimento delle cariche. Ciò comporta la comparsa di
campi elettrici e forze tangenziali sulla superficie carica, che causano un moto longitudinale che è
responsabile della formazione del getto, ma le componenti ortogonali che garantiscono l’equilibrio
meccanico non variano. Ad oggi, gran parte della letteratura sul cono di Taylor si avvale del modello
della conduzione ohmica, per il quale la conduttività elettrica ς è uniforme ed indipendente dalla
densità di corrente j, che è proporzionale al campo elettrico locale: j = ςE. La combinazione di questo
modello con le equazioni di Stokes1 per fluidi caratterizzati da un basso numero di Reynolds (quindi alta
viscosità e bassa inerzia), danno origine al cosiddetto “leaky dielectric model”, introdotto
originariamente da Taylor nel 1966. Modelli più generali tengono conto dei cosiddetti effetti
elettrocinetici: si abbandona l’ipotesi di conduttività elettrica costante e si assume che gli ioni abbiano
mobilità fissa ed esistano a concentrazioni governate dalle relative equazioni di trasporto. Tuttavia
nessun studio sperimentale ha ancora mostrato effetti elettrocinetici rilevanti. Il modello a conduzione
puramente ohmica descrive bene i getti, con un’eccezione per le basse portate, elevata costante
dielettrica e bassa viscosità, come l’acqua e la formammide. L’allontanamento dalle previsioni è dovuto
alla riduzione della concentrazione di sale nella regione di transizione da cono a getto. Il trasporto di
1
George Gabriel Stokes, 1819-1903, matematico e fisico, a cui si devono le equazioni di Navier-Stokes.
52
_______________________________________________________________________ Il cono di Taylor
cariche vicino all’estremità del menisco è singolare, poiché il movimento del liquido modifica la
distribuzione di cariche dettata da pure considerazioni elettrostatiche, perciò, nel tentativo di
ripristinarla, si sviluppano campi e correnti interne.
Tornando alla tensione di soglia, se si trascura il salto di pressione Δp, dal semplice bilancio ε0E2/2 ~ γ/r
tra pressione elettrostatica e tensione superficiale si può dedurre che la tensione critica per ottenere un
electrospray scala come γ1/2. Taylor (1964) conferma tale supposizione proponendo un andamento che
tiene conto anche di una dimensione caratteristica del capillare che sostiene il menisco, il suo diametro
d:
(2.3.6)
Potrebbe accadere che fluidi a tensione superficiale molto elevata, come l’acqua, abbiano una tensione
2.3.6 così elevata da generare scariche elettriche tra gli elettrodi prima della formazione del cono di
Taylor e del relativo getto; esse rendono i flussi di particelle negative più difficili da stabilizzare rispetto a
quelli positivi. In sede sperimentale si possono impiegare, come mezzi isolanti, gas che attraggono gli
elettroni, come anidride carbonica (CO2), ossigeno (O2), o esafluoruro di zolfo (SF6), per ovviare al
problema. Gli stessi risultati valgono per una goccia elettricamente carica al limite di Rayleigh.
Sperimentalmente è ben noto che esistono un range di tensioni e uno di portate in volume all’interno
dei quali il cono ed il relativo electrospray sono stabili; per i propulsori FEEP si parla di nanolitri al
secondo. Non si sa ancora esattamente perché vi siano una portata minima ed una massima; tuttavia la
prima è di grande interesse pratico (biochimico) perché produce il getto di dimensioni minime, con una
separazione nello sciame di gocce che è la più regolare possibile. Il limite massimo di tensione è
associato al manifestarsi di coni di Taylor multipli, passando al cosiddetto regime multi-jet, con eventuali
scariche elettriche. Tipicamente il rapporto Vmax/Vmin è dell’ordine dell’unità e per i propulsori FEEP le
due tensioni sono dell’ordine del kV.
Mentre il potenziale di Taylor descrive completamente il campo elettrico in vicinanza del vertice del
cono di Taylor, la modellizzazione della regione del getto è meno immediata ma ha conseguenze
significative. Infatti la semiapertura del cono è spesso minore di quella prevista da Taylor di αT = 49,29°.
La ragione è che il suo modello non prevedeva l’esistenza di cariche sull’asse dello spray; in realtà la
repulsione provocata da quelle spinge il cono indietro, riducendone l’apertura. La carica spaziale
associata al getto ha una rilevante importanza se si considera che questo si separa dando luogo ad un
altro cono nel quale le velocità delle gocce sono minori di quelle del liquido nel getto. Per fluidi ad
elevata conduttività elettrica, esso ha diametro molto ridotto, perciò ha origine essenzialmente all’apice
del menisco, e la sua lunghezza è piccola rispetto alle dimensioni del cono, di semiapertura β, che forma
a valle e le gocce che lo compongono hanno inerzia trascurabile. Se hanno anche la stessa mobilità, cioè
non sono volatili ed hanno tutte la stessa carica elettrica iniziale q e diametro, il potenziale s e il
numero di gocce per unità di volume n all’interno dello spray valgono:
(2.3.7)
(2.3.8)
Poiché la dipendenza di s dalla coordinata sferica r è esattamente quella del potenziale di Taylor, anche
se non ha dipendenza dalla coordinata angolare, si può raccordare, per θ = β, il suo valore con quello di
53
I principali concetti di propulsione elettrica _________________________________________________
un potenziale di Taylor modificato che permetta la presenza di cariche sulla semiretta θ = 0. Tale
imposizione determina la costante a delle equazioni 2.3.7,8 e l’angolo β, che diventano funzioni della
semiapertura α del cono di Taylor. Questo ora è il parametro libero, che può assumere ogni valore
inferiore ad αT = 49,29° e vi tende nel limite di assenza di carica spaziale, per il quale β = a = 0. La
quantità a si può anche intendere come corrente adimensionata dello spray per unità di angolo solido.
L’importanza dell’angolo β in fase di progetto è notevole: esso fornisce indicazioni di massima per
dimensionare l’elettrodo, di cui si danno delucidazioni ai paragrafi 2.4, 2.9. Tale modello, che gode di
buoni riscontri sperimentali, suggerisce che vi sia un limite alla massima corrente trasmissibile.
Un’altra caratteristica degli electrospray è il ristretto range di dimensioni delle gocce prodotte da una
separazione regolare del getto, indicata col termine “monodispersità” delle gocce. Una conseguenza
sono i colori assunti dallo spray illuminato da luce a più lunghezze d’onda (si veda la figura 2.3.1).
Le variabili che governano il problema dell’electrospray sono, in generale, di tipo elettrostatico: la
tensione e la geometria degli elettrodi, la portata in volume Q, e le proprietà chimico-fisiche del fluido,
tra le quali densità di massa ρ, tensione superficiale γ, viscosità dinamica μ e costante dielettrica relativa
ε. Esplorare sperimentalmente così tante dipendenze è praticamente impossibile, tuttavia per liquidi ad
alta conduttività elettrica, tra cui i propellenti per i FEEP, il diametro del getto è molto più piccolo del
diametro del capillare d che ospita il menisco, e diventa praticamente irrilevante se non per fissare la
soglia di tensione minima per stabilire il cono di Taylor (2.3.6). Similmente, tutte le altre caratteristiche
del problema elettrostatico diventano trascurabili: non solo forme e posizioni di capillare ed elettrodo,
ma anche, in prima approssimazione, la tensione del capillare V. La struttura e la carica del getto
dipendono quasi esclusivamente dalle caratteristiche locali dell’estremità del cono fluido, come ci si
aspetta da una struttura che scaturisce localmente da una singolarità. Una semplificazione del genere è
molto utile, ma non è totalmente esatta. Sperimentalmente si è trovato che la corrente e la forma del
getto dipendono quasi esclusivamente dalla portata in volume Q, con una dipendenza del tipo I ~
(ςQ)1/2.
Si può comprendere un po’ meglio la fisica del getto con alcune semplici considerazioni. Il flusso che si
stabilisce nel cono di Taylor è detto flusso conico (conical flow), e prevede che la velocità al suo centro
sia parallela all’asse del getto, e alla periferia sia parallelo alle generatrici del cono. Una superficie che
colleghi tutti i punti con la stessa velocità sarebbe perciò ortogonale all’asse del menisco e alla sua
generatrice. La conservazione della massa impone che la velocità globale del flusso aumenti andando
verso valle. Al movimento di flusso è associato un trasporto di cariche (convezione), che in generale si
può sovrapporre ai movimenti degli ioni dovuti a forze elettromagnetiche.
La corrente superficiale, di causa convettiva, deve valere Is = 2πλRus, dove λ è la densità di carica
superficiale sulla superficie del cono, R il raggio di curvatura locale sul menisco e us la velocità
superficiale. La conservazione della carica impone che il tasso di variazione di questa grandezza non sia
altro che la corrente che giunge sulla superficie di normale n dalla parte interna del flusso, causata dal
campo elettrico interno Ei, che vale, per unità di superficie, j = ςn·Ei. Perciò sarà dIs/ds = 2πRςn·Ei, dove s
è una coordinata lungo la superficie fluida; per la legge di Gauss si ha anche λ = ε0(E0-εEi)·n. Si possono
definire due scale temporali: una convettiva, dt = ds/us, ed una chiamata tempo di rilassamento della
carica, data da εε0/ς. La distribuzione di cariche superficiale assume una configurazione elettrostatica
quando il tempo convettivo è maggiore del tempo εε0/ς, ossia quando il movimento delle cariche,
trasportate dal flusso, è abbastanza lento da permettere a correnti e campi interni di ripristinare la
configurazione statica. Se accade il contrario si parla di effetti di rilassamento della carica, che possono
essere misurati col rapporto tra εEi·n e E0·n. La conduzione ohmica utilizzata dalla maggior parte degli
autori mostra effetti di questi genere. La superficie rimane essenzialmente equipotenziale fino al punto
in cui la sezione trasversale del menisco è abbastanza ridotta da causare velocità che corrispondono ad
54
_______________________________________________________________________ Il cono di Taylor
un tempo convettivo dell’ordine di εε0/ς. A questo punto, la conduttività elettrica finita è incapace di
rimpiazzare la carica superficiale rimossa dal movimento del fluido (convezione) e tenerla prossima al
valore elettrostatico, e la corrente superficiale è fissa, poiché il raggio di curvatura locale R è ridotto.
L’equilibrio imposto da Taylor (2.3.1) non sussiste più e si ha la transizione a getto. Supponendo un cono
di semiapertura αT = 49,29° e che il flusso abbia simmetria sferica e distanza D dal suo apice, la corrente
superficiale si fissa per D3/Q ~ εε0/ς ed a questo punto vale
(2.3.9)
Il diametro del getto vale invece
(2.3.10)
(2.3. 11)
Dove le funzioni g e G dipendono unicamente dalla costante dielettrica del liquido. L’identificazione
della corrente totale del getto con quella superficiale del cono è presto spiegata. La somma della
corrente causata in superficie dal trasporto del fluido ed all’interno dalla conduzione è costante; l’ultima
è dominante a monte, mentre la prima è l’unico meccanismo di trasporto delle cariche disponibile a
valle. L’assenza di densità di massa e viscosità dinamica è a prima vista sorprendente, ma numerosi studi
indipendenti ne hanno confermato la validità approssimata per fluidi nel range 2 < ε < 182, per alte
conduttività elettriche ed elevate viscosità. I valori teorici per la corrente dimensionata g(ε) sono in
buon accordo con quelli sperimentali. C’è meno uniformità di risultati tra gli autori per quanto riguarda
la funzione G(ε), specialmente per ε elevati. Misurare il diametro del getto è estremamente complicato,
poiché il suo diametro diminuisce da monte verso valle. D’altro canto sarebbe molto utile conoscerne le
dimensioni precise, poiché fornirebbe indicazioni di massima per cominciare a dimensionare l’elettrodo
del propulsore (si veda il paragrafo successivo 2.4).
È ancora possibile derivare un’importante equazione di conservazione nella regione dove la corrente è
puramente convettiva. Scrivendo un bilancio di quantità di moto si deriva una relazione per le energie;
le dissipazioni dovute a conduzione sono assenti dato il dominio del problema:
(2.3.12)
Dove p è la pressione all’interno del getto, u è la sua velocità, supposta radialmente uniforme ad una
data ascissa x e è il potenziale di Taylor, per θ = 0 ed r = x. Sufficientemente a valle, si ha p << 1/2ρu2 e
il raggio del getto diminuisce molto lentamente, R ~ x-1/8. Assumendo che l’instabilità del getto abbia lo
stesso rateo di crescita dei getti cilindrici scarichi, l’ascissa x di separazione del getto scala come
u(ρR3/γ)1/2 ~ (Q2ρ/Rγ)1/2. Conoscere il punto di separazione è estremamente utile per il progetto del
propulsore, perché permette, nota la semiapertura dello spray β, di conoscerne la dimensione all’ascissa
dell’elettrodo.
La viscosità e l’inerzia sono praticamente irrilevanti nella regione dell’apice del cono di Taylor, ma il
processo di separazione del getto coinvolge la densità di massa, che appare infatti nella sua ascissa di
separazione. Tale fenomeno è anche influenzato dalla viscosità dinamica, al cui aumentare cresce il
rapporto tra le dimensioni della goccia e del getto. È stato recentemente dimostrato che la tensione del
55
I principali concetti di propulsione elettrica _________________________________________________
getto può arrivare a valori quasi nulli in liquidi di viscosità moderata, e si pensa che lo stesso debba
accadere per fluidi a viscosità maggiore.
Se si vuole estendere il discorso oltre le considerazioni sviluppate, non è più sufficiente la sola teoria.
Ulteriori studi si basano, ad esempio, sulla dubbia ipotesi di mancanza di effetti di rilassamento di carica,
e comunque non sono in accordo tra loro e con gli esperimenti. Si può tuttavia procedere con studi
numerici per risolvere il cono di Taylor totalmente o in parte. Le strade seguite finora sono infatti due: o
si attacca il problema completo dall’emettitore al getto, anche se la presenza, specie ad alte conduttività
elettriche, di due scale di lunghezze limita la possibilità di progressi; alternativamente si può affrontare
una sola regione, ad esempio l’estremità del menisco, sfruttando cono e getto nelle condizioni al
contorno. Tale approccio permette lo studio di conduttività elettriche arbitrariamente alte. Si è così
scoperto che la viscosità dinamica del fluido non è così irrilevante come era emerso dalla teoria. In
questa maniera inoltre si possono calcolare caratteristiche di getti di dimensioni ridotte, ad esempio 10
nm, difficilmente misurabili con simulazioni dirette; diventano anche accessibili grandezze non ricavabili
con la mera teoria, ma di grande importanza. La massima intensità del campo elettrico E max normale al
menisco, dal lato del gas, ne è un esempio, data la sua rilevanza nell’evaporazione di ioni dal cono di
Taylor. Se la sola lunghezza caratteristica rilevante fosse r* (2.3.10, 11), Emax sarebbe dato da
(2.3.13)
Con φ funzione della sola costante dielettrica del fluido. In tale ambito rimangono tuttavia paradossi che
non hanno riscontro nella realtà e simulazioni che non convergono, con la dannosa conseguenza che
dati simulati e reali spesso non risiedono nella stessa area parametrica, precludendo la possibilità di
confronti.
La minima portata in volume che stabilizza un cono di Taylor delinea un campo di prestazioni molto
importante per la propulsione astronautica, poiché garantisce minori consumi, ed anche per la
spettrometria di massa, poiché determina i getti più sottili possibili, dato un solvente. Sfortunatamente
le teorie basate sulla conduzione ohmica non portano a conclusioni significative su Qmin, ed è necessario
perciò partire da considerazioni più generali. Si consideri un menisco carico positivamente, circondato
da un mezzo isolante, che non sia sede di evaporazione, in modo che la corrente totale sia trasferita
esclusivamente prima dal getto e poi dalle gocce. Se il capillare sede del menisco è metallico e non
rilascia ioni (fatto possibile se è costruito in metalli nobili), il campo elettrico al suo interno è nullo per
induzione elettrostatica e le cariche all’interno si muovono, solo per convezione, tutte alla stessa
velocità. Perciò i flussi positivo e negativo di cariche sono uguali (I+ = -I-). Nel caso più semplice le cariche
sono ioni di un elettrolita, di un unico tipo, con carica fondamentale unitaria ad una concentrazione
iniziale n. Si ricava facilmente che I+ = -I- = neQ, dove e è la carica fondamentale. Un getto elettricamente
neutro trasferirebbe tutti gli ioni positivi e negativi, con corrente netta nulla. Se parte di una sola specie
di ioni, ad esempio quella negativa, fosse neutralizzata dal conduttore e la trasmissione dell’altra specie
rimanesse completa, si avrebbe una corrente netta risultante. Il caso limite vede una completa assenza
di cariche negative trasportate ed una corrente totale I = I+, il limite superiore di tutti i casi possibili:
(2.3.14)
Spesso ci si riferisce a tale situazione parlando di limite di separazione completa della carica; tale
condizione è piuttosto estrema. Per una soluzione di cloruro di sodio, NaCl, le gocce conterrebbero solo
ioni sodio Na+ e non ioni cloro Cl-. Per le regioni finali del getto vi sarebbero cariche positive solo sulla
56
_______________________________________________________________________ Il cono di Taylor
superficie esterna del flusso ed il liquido avrebbe conduttività elettrica nulla. Alcuni liquidi polari, come
acqua e i propellenti, ad esempio la formammide, raggiungono la corrente massima (cioè si verifica la
separazione della carica) per la portata minima ammissibile a sostenere il cono di Taylor, altri liquidi più
viscosi o con molecole meno polarizzate raggiungono la portata minima a correnti inferiori. Ad esempio
l’acqua deionizzata in anidride carbonica associa la portata minima a una pressoché completa
separazione della carica. Tuttavia l’acqua ha una tensione superficiale talmente elevata che la tensione
minima di innesco del cono di Taylor (2.3.6) è vicina a quella che origina archi elettrici, il che può portare
ad un nuovo regime di equilibrio che prevede la compresenza del cono di Taylor e di deboli scariche
elettriche, cioè correnti negative che fluiscono verso monte. La portata risulta perciò inferiore a quella
minima del precedente caso, le correnti maggiori e le gocce di dimensioni minori rispetto al tradizionale
cone-jet. La possibilità di sfruttare l’electrospray e gli archi elettrici insieme apre un mondo di possibilità.
Un modello unidimensionale per il comportamento di uno ione di mobilità ω che preveda, per una data
sezione del cono di superficie A, un campo elettrico E ed una velocità del fluido U fornirebbe correnti del
tipo
±
±
±
(2.3.15)
Una volta entrati nel condotto ed in presenza del campo elettrico, gli ioni positivi ne sarebbero
accelerati e i negativi decelerati, con la loro concentrazione per unità di volume n costante, cioè non vi
sarebbe carica spaziale. La portata può essere ridotta fino ad avere ω-E = U, alla quale si ha separazione
completa della carica: il flusso di ioni negativi è nullo. A portate ancora inferiori gli ioni negativi
sarebbero trasportati a monte, e rimossi da valle, situazione non sostenibile se si vuole avere n costante.
Se una lieve scarica elettrica indirizza ioni negativi all’estremità del cono sono ammesse portate inferiori
(U < ω-E) , come si discuteva prima, in questo caso grazie ad un cambio di segno di I-. Un esempio di
regime a separazione completa di carica si ha nei metalli liquidi, quando gli elettroni sono contenuti tutti
nel cono di Taylor e gli ioni positivi fluiscono verso il suo apice. Per i liquidi ionici, sali che esistono in
condizioni standard in forma dissociata A+B- (si veda il paragrafo 2.5), l’emissione include cationi A+ e ioni
in forma A+(AB), e la situazione è analoga al caso della separazione completa di carica, poiché le
concentrazioni delle due specie di cationi sono, in prima approssimazione, indipendenti dalla portata in
volume e il rapporto tra corrente e portata è costantemente uguale alla densità volumica di carica
(2.3.14).
Fissata una conduttività elettrica ς c’è una portata in volume minima alla quale sono prodotte le più
piccole gocce e getti possibili. Tali dimensioni diminuiscono all’aumentare di ς, ma le leggi di scala
ottenute precedentemente (2.3.10, 11) non sono valide per conduttività arbitrariamente grandi. A valori
di circa 1 S/m, il massimo del campo elettrico sul menisco arriva a valori intorno a 1 V/nm, ai quali gli
ioni migrano dal liquido al gas, causando livelli di corrente Ii che crescono rapidamente all’aumentare di
Emax e diventano presto dominanti. Tale regime viene denominato ionico (PIR, Pure Ionic Regime) ed è
da intendere come il limite superiore del cone-jet; talvolta viene raggiunto scaldando il fluido fino a
qualche centinaio di gradi celsius. L’evaporazione consistente di ioni è, dal punto di vista pratico, molto
importante in quanto non c’è più bisogno di una pompa che mantenga in pressione il propellente e
garantisca la portata, eliminando componenti difficili da costruire alle piccole scale.
La possibilità di ottenere un regime ionico e uno misto con emissione simultanea di ioni e gocce è ben
conosciuta per coni di Taylor di metalli liquidi. In tal caso, ς è di molti ordini di grandezza maggiore che
negli elettroliti, i fenomeni di rilassamento della carica sono inesistenti e il campo elettrico non può
essere controllato esternamente. L’apparire di correnti di ioni che portano il 90% del flusso totale di
57
I principali concetti di propulsione elettrica _________________________________________________
cariche è stato osservato ad alta conduttività (~1 S/m) e basse portate in massa. Il regime PIR è stato
notato anche per i liquidi ionici, ma la ragione per cui alcuni lo presentano ed altri no è ancora
sconosciuta; sembra che la combinazione di alta conduttività elettrica e tensione superficiale aiuti a
sopprimere le gocce; un altro requisito è viscosità relativamente bassa. L’evaporazione di ioni cambia
drasticamente il comportamento del cono di Taylor e si conosce molto poco sui regimi misto e ionico.
2.4 Lo schema di un propulsore
Dopo aver presentato i vari tipi di propulsori elettrici ed introdotto il cono di Taylor, si può affrontare
l’esame preliminare delle componenti essenziali di un propulsore FEEP (Field Emission Electric
Propulsion), partendo da un semplice schema di principio, rappresentato in figura 2.4.1.
Fig. 2.4.1: tipico schema di principio di un FEEP
Lo schema completo prevede una pompa per fornire la portata
di propellente all’emettitore, in
questo caso un capillare conduttore. Esso si trova ad una tensione rispetto a massa dell’ordine delle
migliaia di volt, positiva se le cariche emesse sono positive, negativa se negative. A circa un millimetro di
distanza si trova l’elettrodo estrattore, che, in entrambi i casi, si trova invece ad una tensione
leggermente (decine di volt) o decisamente (migliaia di volt) negativa; la tensione complessiva V (di cui
al paragrafo 2.1), dell’ordine di 10 kV, a cui è sottoposta ogni particella è la somma dei valori assoluti
delle due tensioni. Si vuole tenere la tensione della parte più esterna negativa per evitare che gli
elettroni provenienti dall’ambiente esterno penetrino tra emettitore ed estrattore (si suppone
potenziale nullo all’infinito), cambiando la struttura del campo elettrico interno. Gli elettroni, avendo
meno inerzia, sono potenzialmente più pericolosi dei protoni o di altri ioni più massicci.
Le due tensioni rivestono ruoli diversi, dal punto di vista della regolazione: quella dell’emettitore è
utilizzata per imporre la velocità degli ioni, e quindi l’impulso specifico, mentre la tensione V controlla
corrente e portata in massa elaborate.
Comunemente il regime fluidodinamico di lavoro, che dipende dalla portata in volume Q di fluido
(associata ad una corrente di centinaia di nA), è il cosiddetto “cone-jet mode”, cioè prevede l’esistenza
del cono di Taylor all’estremità dell’emettitore. In prossimità del suo vertice il campo elettrico si fa così
58
______________________________________________________________ Lo schema di un propulsore
intenso da rompere i legami molecolari del liquido che lo attraversa e ionizzarlo. Per livelli di portata più
bassi si assiste all’emissione dal cono di soli ioni, e si ha il cosiddetto regime ionico (PIR, Pure Ionic
Regime), campo di lavoro di iEPS; se la portata aumenta invece si passa al regime droplet: dal cono parte
un getto che successivamente si espande, per le forze di repulsione, in una miriade di goccioline
(droplets). A questo punto, attraversato l’emettitore, le cariche vengono espulse nello spazio alla
velocità c (2.1.14), producendo la spinta T (2.1.1). In termini di prestazioni, il regime PIR garantisce un
impulso specifico più elevato del regime droplet, ma una spinta inferiore, essenzialmente perché il
rapporto carica-massa è più elevato (una giustificazione più esaustiva può essere trovata al paragrafo
2.7 sulle proprietà del propellente).
La conservazione della carica impone che, per ogni ione espulso, si accumuli la corrispondente carica di
segno opposto nel sottosistema, fatto che a lungo andare provoca malfunzionamenti. Per evitare tale
inconveniente si utilizza un altro emettitore per espellere le cariche in eccesso, in direzione normale
all’asse della spinta (si parla in tal caso di un neutralizzatore), o parallelamente ad esso (contribuendo
alla generazione dell’effetto propulsivo). Quest’ultima è la soluzione adottata per iEPS, che tuttavia
richiede un’ulteriore accortezza: per evitare l’accumulo di controioni sulle superfici degli emettitori, che
provocherebbe reazioni elettrochimiche indesiderate, bisogna fare in modo che la polarità degli
emettitori, cioè il segno delle cariche emesse, si alterni nel tempo. Ciò è facilmente realizzabile
programmando opportunamente un microcontrollore che indirizzi le tensioni all’emettitore ed
all’estrattore, problema affrontato nel capitolo 4. Benché si accelerino specie di particelle diverse, la
spinta realizzata dai due emettitori è mediamente la stessa.
Un tipico sottosistema di questo genere, occupando solo 10 mm in lunghezza lungo l’asse della spinta
realizza 66 μN a partire da una potenza in ingresso, prodotto di tensione complessiva V e corrente
sviluppata, di 4 W e da una portata di 0,5 μg/s. La densità di spinta, cioè la spinta ottenuta in condizioni
di progetto divisa per la superficie esterna del propulsore, per la configurazione singola è, tipicamente,
1000 N/m2, avendo l’emettitore un diametro di soli 10 micron.
Dal punto di vista della progettazione dei MEMS, sicuramente il regime ionico è più allettante: ad
esempio garantisce minori consumi, al punto che per iEPS, tutto il propellente è alloggiato al di sotto del
propulsore, incollato all’esterno di una power management tile. Spesso si ricorre alla configurazione
multipla per aumentare la spinta prodotta; essa essenzialmente consiste nell’accostamento di centinaia
di unità base descritte sopra, spaziate tipicamente di 300 μN, con una diminuzione della densità di
spinta, intorno a 1-5 N/m2. Anche se in teoria questa può essere ancora maggiore, è già superiore alla
densità di spinta media dei propulsori ionici, che inoltre sono più ingombranti, cioè hanno maggior
volume specifico (volume del sottosistema diviso per la potenza elaborata), poiché un FEEP non richiede
camere di ionizzazione del propellente. Tuttavia la soluzione multipla comporta interazioni tra i singoli
emettitori, che aumentano al loro avvicinarsi, da tenere sotto controllo; inoltre richiede una
microfabbricazione più complessa.
2.5 I propellenti
Si introducono i principali tipi di propellente per micropropulsori elettrostatici, per poi approfondire la
trattazione in seguito (paragrafi 2.7,8).
Le caratteristiche chimico-fisiche richieste sono essenzialmente: bassa tensione di vapore, necessaria ad
evitare elevate evaporazioni del liquido nel vuoto e quindi perdite, ed alta conduttività elettrica, in
59
I principali concetti di propulsione elettrica _________________________________________________
modo da ottenere correnti accettabili senza tensioni troppo elevate. Proprio l’eccessiva tensione
richiesta fu il principale ostacolo all’applicazione del cono di Taylor alla propulsione elettrica intorno al
1960: a causa del basso rapporto carica-massa del propellente un’alta percentuale non era accelerata.
Recentemente però lo sviluppo di fluidi ad elevata conduttività (dell’ordine di 1 S/m), ha permesso di
facilitare l’emissione di cariche e raggiungere rapporti di 10˙000 C/kg, rendendo realizzabili spinte con
tensioni ragionevoli. Nel caso si realizzi il regime droplet un’alta tensione superficiale può aiutare a
imbrigliare più cariche dello stesso segno su una stessa goccia.
Attualmente le tre sostanze più utilizzate per gli electrospray, che godono delle proprietà richieste,
sono: i metalli liquidi (LMIS, Liquid Metal Ion Source), le soluzioni organiche drogate (doped organic
solutions), e i liquidi ionici (ILIS, Ionic Liquid Ion Source). Dai primi si possono ottenere il massimo
numero di ioni, tuttavia necessitano di serbatoi riscaldati per rimanere allo stato liquido,
rappresentando un’ulteriore fabbisogno energetico da soddisfare; la maggior temperatura del
propellente causa inoltre un aumento di volatilità del propellente, che rischia così di condensare sulle
superfici esterne del satellite (ad esempio sui pannelli solari), compromettendole. In teoria è possibile
realizzare un regime puramente ionico con un metallo liquido. Le proprietà di alcuni metalli liquidi sono
raccolte nella seguente tabella
Tra i liquidi organici, una delle soluzioni più utilizzate è costituita da ioduro di sodio (NaI), sciolto nella
formammide (CH3NO); essa possiede un rapporto carica-massa di circa 104 C/kg, ossia un rapporto
massa-carica di 104 amu/z. Purtroppo è in grado di dare luogo al solo regime droplet, anche se
possedendo un’elevata tensione superficiale si presta ad imprigionare molte cariche sulla superficie
delle gocce.
60
__________________________________________________________________________ I propellenti
I liquidi ionici (IL, Ionic Liquids), utilizzati da iEPS, non sono
altro che sali organici o inorganici allo stato fluido. In
questo particolare stato, i cationi e gli anioni si possono
dissociare, mentre la carica netta complessiva rimane
pressoché nulla. In realtà il vero interesse applicativo è
rivolto a quei sali che si trovano fusi a temperatura
ambiente, cioè fino ad una temperatura massima di 293 K.
Fig 2.5.1: molecola di HAN
Conosciuti dal 1914, recenti sviluppi in chimica hanno
permesso di scoprirne diverse centinaia, tuttavia è ancora
difficile predire le loro proprietà, poiché non si conosce
con precisione l’esatto meccanismo alla base del loro comportamento; finora comunque tutti gli ILIS
(Ionic Liquid Ion Source) conosciuti hanno alta conduttività elettrica e viscosità, e bassissima tensione di
vapore. Si pensa che potranno sostituire gli esplosivi tradizionali, i solventi industriali volatili, e i
tradizionali propellenti per propulsori astronautici. La loro particolare capacità di estrarre circa il doppio
dell’anidride carbonica rispetto a sostanze simili ha ispirato studi sul loro impiego come filtri per la
riduzione di emissioni di gas serra. In campo aerospaziale sono stati sperimentati per la propulsione
chimica, ad esempio lo HAN (hydroxlammonium nitrate, NH3OHNO3, riportato in figura 2.5.1) potrebbe
essere utilizzato come sostituto della tradizionale idrazina come monopropellente, ma anche in coppia
con un ossidante: per molti liquidi ionici associati a ossidanti tradizionali è stato osservato un
comportamento ipergolico. La sperimentazione come propellente per electrosprays è scaturita grazie
alla loro bassa tensione di vapore, e i primi studi hanno confermato che un liquido ionico può sostenere
un regime di emissione puramente PIR. I rapporti carica-massa realizzabili coi tre tipi di propellenti sono
riportati nella seguente tabella
Il vantaggio dei liquidi ionici è che il regime PIR si può ottenere a basse temperature, evitando un carico
di lavoro aggiuntivo per i sottosistemi del satellite e rischi di condensazioni dannose indesiderate. Il
regime droplet si può ottenere anche aumentando la portata, tornando semplicemente a fornire una
pressione al fluido. Il propellente adottato per iEPS è lo EMIM-BF4 (1-ethyl-3-methyl imidazolium
tetraflouroborate, di cui un diagramma ball-and-stick è in figura 2.5.2), in grado di lavorare in entrambi i
regimi, ionico e droplet, con un rapporto carica-massa medio di 400000 C/kg. Se ne forniscono le
caratteristiche nelle seguenti tabelle.
Ionic
formula charge
BF4
-1
C6H11N2
1
Atomic
Weight
86, 80
AMU
tetrafluoroborate
1,44 E25 kg
111,17
1-ethyl-3AMU
methylimidazolium 1,85 E25 kg
Ionic names
Structure
Densità
[kg/m3]
Viscosità dinamica
[Pas]
Conduttività elettrica
[S/m]
Tensione superficiale
[N/m]
Tensione di
vapore [kPa]
1247,9 ± 8,7
a 293,15 K, 1
atm
0,0665 ± 0,0027
1,4 ± 0,040
0,05281 ± 5,7E-0,4
~E-06 - E-05
a 293,1 K, 1 atm
a 298,1 K, 1 atm
a 298,1 K, 1 atm
a 450 K
61
I principali concetti di propulsione elettrica _________________________________________________
Date le nozioni fondamentali sui FEEP, si passa adesso ad un’analisi più approfondita dei suoi elementi
essenziali: emettitori (paragrafo 2.6), proprietà del propellente (parr. 2.7,8) ed elettrodi (par. 2.9).
Fig 2.5.2: molecola di EMIM-BF4
2.6 Gli emettitori
I principali tipi di emettitori adottati sono capillari, emettitori in silicio e in metalli porosi. La prima
soluzione è sicuramente la più semplice ed economica da realizzare, adottata spesso quando bisogna
assemblare array da centinaia di unità. Le ultime due sono più recenti, presentano una geometria conica
e non necessitano di ausili esterni per mantenere il flusso, al contrario della prima. Sfortunatamente il
silicio necessita di trattamenti superficiali per il suo comportamento idrofobo, permettendo un flusso
sulla superficie esterna dell’emettitore dalla base verso l’apice, ma rimane una via semplice ed
economica. I metalli porosi (con pori dell’ordine di nanometri) permettono invece un flusso dall’interno,
ma richiedono processi tecnologici molto più laboriosi, che fanno lievitare i costi. L’ostacolo principale
sta nella penetrazione dell’agente corrosivo, impiegato per ricavare gli emettitori, nel materiale, perciò
si adottano tecniche all’acquaforte non convenzionali. Nel caso di iEPS si applica sul blocco di metallo
una maschera trasparente su cui sono posizionati fotoresistori in corrispondenza alle posizioni degli
emettitori. Dopo un bombardamento di raggi UV, i fotoresistori, sopravvissuti, proteggono il materiale
dall’aggressione chimica, mentre le aree circostanti, non protette, vengono corrose creando una nuova
superficie piana su cui giacciono le basi degli emettitori. Tutto ciò è complicato dalla richiesta di
realizzare array fitti, con densità dell’ordine di 4-6 emettitori al mm2, intervallati a 0,4 mm.
I vantaggi dell’impiego di un emettitore in metallo poroso, rispetto ai più comuni, come i capillari o i coni
in silicone, sono almeno tre: il trasporto del propellente avviene grazie all’azione della capillarità, senza
bisogno di componenti come pompe e valvole, difficili da riprodurre nei MEMS; la migliore emissione di
ioni a livelli di corrente più elevati; l’elevata area di contatto tra liquido e metallo, che ostacola lo
stabilirsi di reazioni elettrochimiche. Tuttavia, al momento non esistono praticamente procedure per la
fabbricazione di microstrutture come gli emettitori su questi materiali, ma poiché i benefici superano le
difficoltà tecniche, il crescente interesse verso tali metodi sta producendo i primi risultati concreti. Una
volta fabbricato, il monoblocco che ospita il serbatoio di propellente e gli emettitori va allineato e
saldato a una struttura di alloggiamento su cui sono montati anche gli elettrodi. Vari materiali sono
possibili per la realizzazione, ma il silicone è di particolare interesse per la ampia letteratura già
disponibile.
62
_________________________________________________________________________ Gli emettitori
Fig 2.6.1: possibili geometrie di emettitori
Concettualmente, la transizione dalla configurazione singola alla multipla avviene in due momenti: in
primo luogo si circonda un singolo capillare con un anello di materiale dielettrico, come in figura 2.6.1, e
successivamente si affiancano più unità singole che emergono da una base comune.
I risultati dello studio che si presenta in seguito hanno un andamento comune, dal punto di vista
qualitativo, indipendente dal tipo di materiale ed emettitore impiegati, variano invece
considerevolmente con la geometria del sistema, che influenza anche il campo elettrostatico.
Proprio le influenze della forma sulla struttura del campo provocano effetti interessanti nel primo passo
dell’esperimento. Inserendo il disco di materiale dielettrico ad una distanza L dall’estremità del capillare
di circa quattro volte il suo diametro, si nota la formazione del cono di Taylor e dell’electrospray, senza
differenze apparenti rispetto al caso del capillare libero. Al decrescere del parametro L invece, il cono di
Taylor aumenta in lunghezza, segno che il modulo del campo elettrostatico all’estremità del capillare si è
ridotto; al limite sarà talmente scarso da non permettere la formazione del cono e del getto, il che
accade quando il dielettrico raggiunge l’estremità del capillare e si forma una bolla di liquido, di raggio
crescente nel tempo, dovuta al passaggio del propellente dal sistema di alimentazione alla superficie del
dielettrico. Una base dell’emettitore bagnata comporta un decadimento delle prestazioni; emerge
perciò la necessità di fabbricare array bidimensionali di microemettitori che si estendano leggermente
oltre la base comune, che richiederanno comunque maggiore intensità del campo elettrostatico,
rispetto ad un emettitore libero, a parità degli altri fattori, per poter dare luogo ad un electrospray. Un
rapporto lunghezza-diametro di circa 1 dovrebbe essere adeguato per soluzioni di formammide e
nitrometano.
Per confrontare le prestazioni delle due configurazioni, singola e multipla, si possono considerare un
emettitore convenzionale, un capillare in acciaio e uno microfabbricato in silicone, con gli stessi diametri
interno ed esterno, e rivestito in oro per ridurre la corrosione da parte del propellente comune, una
soluzione di tri-glicole etilenico (TEG, tri-ethylene glycol) drogata con ioduro di sodio (NaI), quindi un
tipo di propellente organico drogato. Per quanto illustrato in precedenza, è necessario che il
microemettitore emerga dalla propria base, in questo caso di poche centinaia di micrometri.
63
I principali concetti di propulsione elettrica _________________________________________________
Fig 2.6.2: mappa di stabilità di un electrospray emesso da un capillare in acciaio alimentato con TEG-NaI
La figura 2.6.2 riporta l’andamento della corrente dello spray in funzione della tensione di accelerazione,
a varie portate in volume, per l’emettitore convenzionale. Le portate, come per l’emettitore in silicone,
variano all’interno dei limiti posti dal cone-jet mode; per le più basse, la corrente appare praticamente
indipendente dalla tensione applicata; per le più alte, come era logico aspettarsi dalla 2.1.13, aumenta la
corrente emessa. La sensibilità della corrente alla tensione dell’estrattore emerge in questa zona: essa
aumenta per le tensioni più elevate; ma anche la tensione minima per innescare la formazione del cono
di Taylor risente della portata elaborata, aumentando all’aumentare di quest’ultima. Al crescere della
portata, a parità di tensione, si assiste ad un aumento della spinta, per la 2.1.1; nulla si può dire
sull’impulso specifico (2.1.11); la corrente aumenta in accordo con la 2.1.13. Ad una portata fissata
invece, l’aumento di tensione provoca un aumento di impulso specifico (2.1.11) e di spinta (2.1.1), dalla
2.1.13 si deduce che il rapporto carica-massa deve essere aumentato. Nulla si può dire in entrambi i casi,
almeno con una valutazione qualitativa, sull’andamento del rendimento η (2.1.16).
Fig 2.6.3: confronto della caratteristica corrente di spray-tensione applicata per capillare in acciaio e singolo
microemettitore
In figura 2.6.3 si possono confrontare le prestazioni dei due tipi di condotti, che operano a portate in
volume simili. Siccome gli andamenti sono analoghi, le prestazioni si dovranno comportare allo stesso
modo; il campo elettrostatico sarà però meno intenso al termine del microemettitore, perciò a parità di
performance, sarà necessario applicarne uno più alto che nel caso del capillare. Il grafico dell’emettitore
64
_________________________________________________________________________ Gli emettitori
convenzionale mostra una discontinuità molto più marcata di
quello al silicone, ad una tensione, minore, di 4,6 kV. Il brusco
aumento di corrente segna la transizione ad un regime con più
coni di Taylor e più getti che emergono dallo stesso condotto, il
cosiddetto regime multijet, il quale non si osserva per l’altra
soluzione, che nel range di tensioni più elevate aumenta solo la
sensibilità della corrente alla tensione continuando ad operare
con un solo cono di Taylor. Come è stato mostrato
precedentemente, la differente geometria della configurazione
multipla indebolisce il campo elettrostatico al termine del
condotto, ciò si traduce in una soglia di tensione del cone jet
mode più elevata a parità degli altri fattori, come si nota
facilmente dalla figura, ma anche in un restringimento del
regime multijet, che può risultare vantaggioso, in quanto se
Fig 2.6.4: confronto della forma del
non si è progettato il propulsore per operare specificatamente
cono di Taylor tra: a) capillare in acciaio
in tali condizioni, generalmente si verificano perdite
e b) microemettitore
considerevoli di energia, ad esempio perché i getti possono
non essere paralleli all’asse della spinta.
Le differenze nell’andamento del campo elettrostatico hanno anche conseguenze sulla forma dei coni di
Taylor. Come si può vedere dalla figura 2.6.4, per l’emettitore in silicone risulta più allungato, segno che
il campo elettrostatico si è fatto localmente meno intenso.
Per ribadire che i risultati ottenuti hanno valenza generale, da un punto di vista qualitativo, si può
osservare che le stesse mappe di funzionamento si sarebbero ottenute, ad esempio, per un liquido
ionico eiettato da un emettitore in acciaio.
Tornando al caso in esame, si possono rielaborare i dati a disposizione per ottenere ulteriori
considerazioni. Assumendo che, alla tensione di soglia e ad una certa portata in volume, l’intensità del
campo elettrostatico al vertice del cono di Taylor sia la stessa, indipendentemente dalla geometria del
sistema, tale valore può normalizzare le tensioni provenienti da emettitori con differenti geometrie,
distanze tra emettitore ed emettitore e tra elettrodo ed emettitore. Applicata tale assunzione ai casi
esaminati, si ottiene il grafico di figura 2.6.5, nel quale si può osservare che il range operativo di tensioni
corrispondenti a coni di Taylor stabili ha circa la stessa estensione in entrambe le soluzioni, anche se non
c’è transizione al regime multijet nel caso di un emettitore per array bidimensionali.
65
I principali concetti di propulsione elettrica _________________________________________________
Fig 2.6.5: caratteristica corrente di spray-tensione applicata per capillare in acciaio e singolo
microemettitore con tensioni normalizzate
Se si vuole realizzare il regime a coni multipli nell’ultimo caso, è necessario innalzare ulteriormente la
tensione applicata, tuttavia va sempre tenuto in considerazione un altro fenomeno. È possibile che
prima dell’innescarsi della formazione dei coni, si verifichi una scarica elettrica tra elettrodo ed
emettitore. Così mentre la corrente comincia ad aumentare per effettuare la transizione, l’arco elettrico
riduce l’intensità del campo elettrostatico impedendo la transizione, provocando una instabilità
periodica nell’andamento della corrente. La possibilità di formazione di tale scarica è favorita
dall’aumento locale di pressione, tra emettitore ed elettrodo, indotto dall’evaporazione, seppur scarsa,
del liquido nel getto e nel cono di Taylor.
Si può ora passare alle considerazioni sul funzionamento a regime di gruppi di emettitori per array,
ciascuno dei quali supporta in modo stabile un solo cono, da cui parte un getto che può essere formato
da gocce ionizzate o da soli ioni, come in figura 2.6.6. Le dimensioni dei condotti non variano, neanche la
loro altezza sulla base comune, la disposizione invece passa da triangolare a esagonale. In figura 2.6.7 si
riporta la caratteristica corrente-tensione per i vari array a differenti portate in volume; risultano tutte
avere un andamento simile a quelli osservati prima. Le tensioni critiche di soglia per ottenere coni di
Taylor stabili appaiono vicine nel caso di emettitore singolo e tripletta. Il valore leggermente maggiore
per l’array a tre è prevedibile per la maggiore portata in volume a cui si effettua la misura; ciò indica che
non sono presenti rilevanti schermature elettriche o riduzioni dell’intensità del vettore E causate dalla
geometria triangolare. Contrariamente, nell’ultimo caso, nonostante un flusso di propellente minore di
7 nL/s, il minimo dei tre, si è registrato un valore della tensione di soglia considerevolmente maggiore.
Infatti la schermatura non è più trascurabile, e dà luogo alla destabilizzazione del cono centrale ed
all’oscillazione della sua estremità al diminuire della tensione applicata. In campo stabile, inoltre, tale
struttura si presenta più allungata delle circostanti. Per evitare la schermatura del cono di Taylor
centrale da parte degli scarichi più esterni e l’aumento della tensione minima per stabilire un
electrospray in cima a tutti gli emettitori, si può ricorrere a geometrie più complesse di quella a singolo
foro, adottata finora. La discussione della geometria degli elettrodi è approfondita al paragrafo 2.9.
66
_________________________________________________________________________ Gli emettitori
A sinistra, fig 2.6.6: immagini CCD di coni di Taylor
formatisi su: a) un array con tre microemettitori e b)
uno con sette
A destra, fig. 2.6.7: confronto delle caratteristiche
corrente di spray-tensione applicata per gruppi di uno,
tre e sette microemettitori alimentati con propellente
TEG
Per concludere, si ricorda che anche questi risultati hanno valenza generale. Si sarebbe ottenuto lo
stesso schema di comportamento per quattro emettitori su una piastra di dielettrico o per sei in linea:
tensioni operative più elevate e campo elettrico indebolito al centro del sistema rispetto al singolo
scarico a parità degli altri fattori. La tensione di soglia per ottenere il funzionamento stabile aumenta al
diminuire della separazione tra gli scarichi, come si era già anticipato.
Dal paragrafo 2.3 è nota la legge di scala che riporta la corrente in funzione della portata (2.3.9), che è
stata ricavata sotto le ipotesi di fluido ad alta conduttività e permittività elettrica. Questa si può
rappresentare nella forma più generale
(2.6.1)
Dove tipicamente la corrente è in nanoampere e la portata in nanolitri al secondo. La relazione fornita
nel paragrafo introduttivo 2.1.13 tra corrente e portata in massa ne rappresenta una ragionevole
approssimazione. Nel caso delle proprietà sopra menzionate ha esponente a = 0,5, e per basse
conduttività elettrica e viscosità dinamica 0,25. Non risulta, da questo modello, che esistano relazioni tra
corrente dello spray e tensione dell’emettitore.
Il comportamento per un singolo emettitore convenzionale alimentato con la solita soluzione di TEG è
riportato in fig. 2.6.8. La curva di fit indica che la relazione è di tipo polinomiale, simile alla 2.6.1, ma con
esponente 0,36, significativamente diverso dal valore atteso 0,5. Una possibile causa di tale divergenza è
che l’esperimento è stato effettuato nel vuoto, e non a pressione atmosferica, come esigono le 2.3.9,
2.6.1.
67
I principali concetti di propulsione elettrica _________________________________________________
Lo stesso apparato, alimentato con BmiBF4 (1-butil-3-metilimidazolio tetrafluoroborato 1-butyl-3methylimidazolium tetrafluoroborate), manifesta un andamento simile (fig. 2.6.9), ma con dipendenza
dalla tensione, che modifica l’esponente a da 0,42 alla tensione di soglia a 0,45 a 4 kV. Tale
comportamento può essere osservato solo sotto vuoto. Considerando solo la curva a tensione minima, il
parametro a è più vicino al valore presunto 0,5, ma comunque ancora sostanzialmente differente.
A sinistra, fig. 2.6.8: caratteristica corrente - portata per emettitore convenzionale; a destra, fig. 2.6.9:
caratteristica corrente - portata per microemettitore.
Com’è già stato discusso, l’accoppiamento di più microemettitori causa la schermatura, accentuata per
le unità più centrali, causando anche un aumento delle tensioni operative, almeno nel caso di elettrodo
estrattore con singolo foro. Per poter stabilire dei confronti, nel seguito si considerano solo le tensioni di
soglia; le correnti e portate dell’array sono date per singolo microemettitore, per cui vale ancora la
2.6.1. In figura 2.6.10 è riportata la solita mappa corrente - portata per microemettitori provenienti da
gruppi di 1, 3 e 7 unità (l’array di provenienza è indicato con un numero). La curva di fit per l’emettitore
convenzionale è riportata per consentire paragoni. Le due curve risultano quasi sovrapponibili, con
Fig. 2.6.10: confronto tra caratteristiche corrente – portata in volume per singolo emettitore (linea
tratteggiata) ed array di microemettitori (linea continua)
esponenti a di 0,37 per la configurazione multipla e 0,36 per la soluzione singola. Le prestazioni di un
array di emettitori sono quindi comparabili a quelle degli emettitori convenzionali ed indipendenti da
geometria e dimensioni del sistema.
68
_________________________________________________________________________ Gli emettitori
Un’ultima differenza tra le configurazioni singola e multipla riguarda la precisione del livello di spinta nel
tempo. Tale quantità è un requisito rilevante del propulsore, e può essere misurata indirettamente
mediante l’accuratezza del livello di corrente emessa dall’electrospray. In figura 2.6.11, si confrontano le
correnti provenienti da un singolo microemettitore e un gruppo di sette. Come sempre, il flusso di
cariche in quest’ultimo caso è normalizzato in modo da visualizzare la corrente per singolo
microemettitore. È stata effettuata una misura al secondo per dieci minuti. L’unità singola presenta una
deviazione standard dello 0,39% del valore medio di 329 nA, mentre il gruppo di sette produce una
corrente meno stabile , con una deviazione standard dello 0,92% sul valor medio di 220 nA. Ciò è
probabilmente causato dalla disuniformità del campo elettrostatico, causata dalla geometria
dell’elettrodo estrattore; si può evitare adottando una configurazione più accurata, nella quale ogni
microemettitore è allineato ad un foro circolare dell’elettrodo. Tali questioni sono comunque affrontate
nel paragrafo 2.9.
2.7 Le proprietà dei propellenti
In questa sede si approfondisce l’influenza del propellente, sia esso metallo liquido, soluzione organica o
liquido ionico, sulle prestazioni del propulsore FEEP in configurazione singola. Le conseguenze sulla
configurazione multipla sono facilmente deducibili dalla trattazione al paragrafo 2.1 (2.1.18-23).
Con le relazioni fondamentali per i propulsori electrospray del paragrafo 2.1 è già possibile trarre
qualche conclusione. In particolare si può discutere l’influenza del rapporto carica-massa, a parità degli
altri fattori, considerando la portata in massa imposta dall’esterno. Naturalmente la corrente ottenibile
dal getto (2.1.13) è proporzionale a q/m, come la potenza utile (2.1.7); la velocità di uscita c (2.1.14)
scala invece con la sua radice quadrata, come la spinta (2.1.1), il Δv (2.1.4) e l’impulso specifico (2.1.15).
Diversamente il rendimento energetico (2.1.16) risulta indipendente dal rapporto carica-massa, in
quanto la dipendenza dell’impulso specifico da esso è annullata al suo interno. Il rapporto carica-massa
in realtà non dipende esclusivamente dal tipo di fluido propulsivo, ma anche dal processo di
ionizzazione, tuttavia risulta legato almeno alla sua conduttività elettrica.
Ulteriori conclusioni sono difficilmente ricavabili procedendo per questa via. Se si considera
semplicemente la densità del propellente, già non è chiara la sua influenza sulle prestazioni: varia la
portata in massa e il rapporto q/m in modi opposti, e non si può capire quale aumento o diminuzione
prevalga ad esempio nella spinta (2.1.1). È necessario ricorrere a relazioni empiriche tra alcune proprietà
fisico-chimiche del propellente: costante dielettrica relativa ε, conduttività elettrica ς, tensione
superficiale γ e densità di massa ρ.
Sperimentalmente si deduce che la portata in volume Q, che permette il cone-jet mode a cui il
propulsore lavora, rientra in un preciso range, funzione del tipo di propellente:
γ
γ
(2.7.1)
Dove è la costante dielettrica del vuoto. La portata in massa non può perciò variare liberamente: si
può supporre che venga imposta dall’esterno, ma entro gli opportuni limiti. In vicinanza dell’estremo
inferiore si ha emissione di soli ioni, il cosiddetto PIR (Pure Ionic Regime), intorno al limite superiore
invece, un finissimo getto di fluido elettrizzato si forma all’apice del cono di Taylor, poi si disperde in
69
I principali concetti di propulsione elettrica _________________________________________________
piccole gocce che si respingono, dando luogo a una struttura conica con asse sul getto ma opposto al
cono di Taylor. Ovviamente in questo caso il rapporto carica-massa è inferiore. Con argomentazioni
dimensionali si può dedurre che il diametro delle gocce vale
(2.7.2)
Dove g( ) è un fattore empirico dell’ordine dell’unità, e r* è una lunghezza di scala caratteristica del
raggio del getto in prossimità della sua base. Con i valori usuali delle variabili in gioco, i diametri delle
gocce sono dell’ordine di decine di nanometri. Queste sono accelerate fino a grandi velocità, a impulsi
specifici di alcune migliaia di secondi. Con la stessa trattazione dimensionale si può riscrivere l’impulso
specifico (2.1.17) in funzione delle caratteristiche del propellente:
γ
(2.7.3)
Da cui si deduce la dipendenza del rapporto carica-massa dalle proprietà del fluido esaminato. È
possibile scrivere la portata in volume come φQmin,dove Qmin è l’estremo inferiore della 2.7.1 e φ varia
tra 1 e 20 - 30; sostituendo nel rapporto carica-massa si ottiene
γ
(2.7.4)
Come anticipato nella discussione sui propellenti al paragrafo 2.5, un’elevata conduttività elettrica si
traduce in elevati rapporti carica-massa; era prevedibile che diminuisse all’aumentare della densità del
propellente. È anche funzione della portata, diminuendo al suo aumentare come si era ipotizzato in
precedenza. Si manifesta inoltre l’effetto della tensione superficiale, che contribuisce a imprigionare più
cariche dello stesso segno su una goccia (almeno in regime droplet) o all’apice del cono di Taylor, come
anticipato nella trattazione dei propellenti (paragrafo 2.5).
Utilizzando una trattazione semi-empirica di questo tipo non è chiaro il ruolo della permittività elettrica
relativa, che compare contemporaneamente sottoforma di potenza razionale di sé stessa e della
funzione f, di cui non si conosce l’andamento. Se si immagina una carica q, soggetta alla sola forza
elettrostatica, la sua accelerazione sarà data dal prodotto dell’intensità del campo elettrostatico locale
per il rapporto carica-massa. Dovrebbe risultare chiara allora l’influenza della costante dielettrica
relativa sulla spinta. Se all’interno del fluido il campo elettrostatico è pari a quello nel vuoto diviso per la
permittività elettrica relativa, più essa è bassa più la particella risulta accelerata. Ciò vale sempre
all’interno del cono di Taylor, e in caso di regime droplet, anche per gli ioni che si trovano all’interno
delle gocce.
Per la spinta si ha, sempre con ragionamenti dimensionali:
(2.7.5)
Si può intravedere, prima che sia esplicitata la portata in volume, l’effetto benefico della permittività
elettrica relativa appena discusso. È possibile adesso descrivere in dettaglio l’influenza della densità sulla
70
______________________________________________________________ Le proprietà dei propellenti
spinta (2.1.1) considerando il secondo membro della 2.7.5. La portata in massa aumentava espellendo
particelle più dense, tuttavia si abbassava il rapporto q/m, diminuendo la velocità della massa espulsa
(2.1.14). Questa, scalando con la radice quadrata del rapporto carica-massa, sembra avere meno
influenza sulla spinta, che aumenta all’aumentare della densità di massa ρ. Anche la portata in volume
ha un effetto benefico sulla spinta, nonostante la diminuzione del rapporto carica-massa al suo
aumentare osservato nella 2.5.4; tuttavia diminuisce l’impulso specifico (2.7.3), come ci si poteva
aspettare dalla sua definizione (2.1.11). In entrambe le forme approssimate la tensione superficiale
contribuisce alla spinta, poiché aumenta la densità di carica elettrica, come descritto in precedenza,
quindi l’accelerazione a cui è sottoposta ogni goccia e la sua velocità finale c, almeno in regime droplet.
Un ruolo analogo spetta alla conduttività elettrica, la quale aumenta il rapporto carica-massa con effetti
simili alla tensione superficiale.
Applicando la sostituzione Q = φQmin all’espressione dell’impulso specifico 2.7.3 si arriva alla
(2.7.6)
Alcune considerazioni sono analoghe a quanto osservato in precedenza. La prima forma dell’impulso
specifico (2.7.3) mostra un ruolo positivo della tensione superficiale, i cui effetti benefici sulla velocità
finale c, sinonimo dell’impulso specifico, sono stati già discussi precedentemente. Un ruolo analogo
gioca, in entrambe le forme, la conduttività elettrica, visti i suoi effetti sulla velocità di scarico. Si
ripresenta anche, in modo un po’ più chiaro, l’effetto della permittività elettrica del fluido. Inoltre si
poteva facilmente intuire dalla definizione di impulso specifico (2.1.11), che la densità di massa,
aumentando, ne determina una riduzione; altrimenti si può osservare che la velocità finale c risente
della maggior inerzia delle particelle cariche.
La sostituzione della portata in volume con le proprietà chimico-fisiche del propellente (2.7.1) porta
talvolta a conclusioni che difficilmente si possono ottenere da semplici considerazioni fisiche.
A partire dalle espressioni precedenti si possono ricavare gli altri parametri prestazionali in funzione
delle solite proprietà del propellente; per la velocità di scarico si ha, ovviamente
γ
(2.7.7)
Gli effetti di densità di massa, tensione superficiale, conduttività elettrica e permittività elettrica relativa
sono stati già discussi; si avrebbe lo stesso andamento per il Δv (2.1.4). A parità di tensione applicata,
per variare c, si può quindi sfruttare la conduttività elettrica, la permittività elettrica e la densità (al cui
aumentare la velocità naturalmente diminuisce) ma non la tensione superficiale. La corrente I (2.1.13),
una volta fissata la portata in volume attraverso il parametro φ, ha la seguente espressione:
(2.7.8)
Come anticipato nel paragrafo sui propellenti 2.5, la tensione superficiale, contribuendo a raggruppare
più cariche dello stesso segno su una goccia, almeno in regime droplet, dà un contributo positivo alla
71
I principali concetti di propulsione elettrica _________________________________________________
corrente. Una maggior densità naturalmente privilegia la portata in massa rispetto alla corrente, al
contrario della portata in volume.
Procedendo analogamente a sopra, si può derivare il legame tra le caratteristiche chimico-fisiche del
fluido propulsivo e la potenza utile:
(2.7.9)
Dove non compare la conduttività elettrica ς.
Infine, si può ancora ottenere facilmente una forma funzionale per il rendimento energetico (2.1.16),
ricorrendo alle espressioni per la corrente (2.7.8) e per la potenza utile (2.7.9) appena ricavate:
(2.7.10)
Sorprendentemente, in ultima analisi esso non dipende da alcuna proprietà del propellente, ma solo
dalla portata in volume elaborata: è perciò funzione del solo regime operativo. L’aumento di portata in
volume comporta una diminuzione del rapporto carica-massa e perciò della velocità di scarico c, ma
anche un aumento di spinta, che prevale (2.7.5), tuttavia l’aumento di corrente è maggiore (2.7.8), e
penalizza il rendimento.
Tutte le principali proprietà chimico-fisiche hanno ruoli diversi nell’andamento delle prestazioni,
comparendo a numeratore in una e a denominatore in un’altra. La scelta del propellente per una data
missione si presenta perciò come una ricerca della combinazione di proprietà che permetta di realizzare
prestazioni il più possibile vicine agli obiettivi posti, ricorrendo dove necessario a ragionevoli
compromessi. L’elevato numero di liquidi ionici oggi disponibili permette, fortunatamente, di scegliere il
propellente con proprietà dalle prestazioni adeguate per ciascuna missione.
L’emissione di ioni dal cono di Taylor o dalle gocce diventa significativa per la corrente emessa ad alti
rapporti ς/Q, quando il diametro delle gocce diminuisce, come si deduce dalla (2.7.2), o, in altre parole,
all’avvicinarsi del regime ionico. L’evaporazione di ioni da gocce di raggio r avviene a una certa intensità
critica del campo elettrostatico, calcolata da Taylor con un semplice bilancio di forze:
,
(2.7.11)
2.8 Simulazione molecolare di un getto di droplets
Può essere utile simulare la dinamica di un folto gruppo di molecole di propellente sottoposto ad un
intenso campo elettrostatico, per meglio comprendere come il getto si forma, se ad esempio dà luogo a
cluster di ioni, e che ruolo hanno questi nella generazione della spinta.
La simulazione qui riportata è stata condotta sul liquido ionico EMIM-BF4 con una versione modificata
del programma Tinker. Essa consiste nel risolvere la seconda legge di Newton per ogni atomo del
sistema, su cui agiscono la forza elettrostatica e un sistema di forze di risultante F esprimibili come
gradiente di un potenziale:
72
______________________________________________ Simulazione molecolare di un getto di droplets
(2.8.1)
La risultante F tiene conto di interazioni elettrostatiche interne alla molecola, attrazioni e repulsioni alla
Lennard-Jones, torsioni, piegamenti e stiramenti dei legami molecolari.
Per cominciare si costruisce la struttura iniziale delle goccioline piazzando casualmente gli ioni del sale,
portando alla luce un fatto molto interessante: simulando la dinamica in assenza di campo elettrico, tali
strutture si rivelano instabili, smembrandosi immediatamente. È stato dimostrato in seguito che la
stabilità a temperatura ambiente e la bassa tensione di vapore dei liquidi ionici derivano dalla
sopravvivenza alla fusione delle strutture ordinate dello stato solido. Sono state adottate perciò delle
gocce cubiche a struttura ordinata, rappresentate in fig. 2.8.1, che inserite nel modello hanno assunto
una geometria sferica. Un importante fenomeno da tenere in conto è l’agitazione termica, che causa
rilevanti cambiamenti di forma nella relativa scala temporale.
Fig 2.8.1: goccia cubica di EMIM-BF4
A questo punto si inseriscono nel sistema una serie di campi elettrostatici uniformi di differenti
intensità, osservando il comportamento delle gocce. La simulazione, che avviene nel vuoto per 100 ps, è
ad energie inizialmente casuali basate su una temperatura di 300 K e comprende gocce a diversi rapporti
EMIM/BF4: 8/7, 27/26, 125/124, in modo da ottenere sempre una carica netta unitaria positiva. I
diametri iniziali sono approssimativamente di 21, 38 e 50 Å; il campo elettrostatico Ex è equiverso
all’asse delle ordinate, ed assume intensità crescenti: 0,5142 x 109, 1,028 x 109, 1,543 x 109, 2,057 x 109 e
3,085 x 109 V/m. Il conseguente comportamento del liquido mostra come la transizione al regime ionico
sia graduale e sempre più rapida all’aumentare del modulo del campo elettrostatico. Anche se il regime
ionico vero e proprio prevede che l’emissione di ioni avvenga per lo più dal cono di Taylor, la cui
dinamica sicuramente non ricorda quella di una goccia, tale esempio illustra chiaramente la gradualità
del processo, senza ricorrere ad una trattazione più complessa.
Tutti i tipi di gocce si rivelano stabili per l’intera simulazione a un’intensità di campo di 0,5142 x 10 9 V/m.
L’agitazione termica è l’unica responsabile di cambiamenti nella configurazione molecolare e l’intero
sistema è accelerato nella stessa direzione e verso del vettore intensità del campo elettrico, in accordo
con la 2.8.1. Al crescere dell’intensità, singoli ioni cominciano ad essere espulsi dalle gocce, in modi
73
I principali concetti di propulsione elettrica _________________________________________________
diversi al variare del campo elettrostatico: si
manifesta una varietà di dimensioni dei cluster
espulsi, dai singoli ioni a una goccia residua,
alle intensità più basse, nella quale risiede
pressoché tutta la massa iniziale. All’intensità
massima, gli ioni si allontanano in pochi
femtosecondi, disfando la goccia. Una serie di
passaggi della simulazione di una goccia di
rapporto 27/26, sottoposta a un campo di
modulo Ex pari a 2,057 x 109 V/m, è mostrato in
figura 2.8.2
Durante la simulazione, mentre la forza
elettrostatica applicata rimane costante, le
Fig. 2.8.2: simulazione di una goccia di rapporto 27/26
forze di Coulomb e di Lennard-Jones che
EMIM/BF4
agiscono su ogni ione variano al variare della
loro posizione relativa; di conseguenza la forza risultante agente su uno ione non è costante nel tempo.
L’effetto delle cariche circostanti e dell’agitazione termica sul getto di ioni espulsi diventa significativo
per tempi più lunghi, dell’ordine della decina di picosecondi.
Se si considera esclusivamente la componente elettrostatica, la legge oraria del moto del baricentro del
sistema diventa, conformemente alla seconda legge di Newton (2.8.1), parabolica e crescente nel verso
positivo dell’asse delle ordinate, come si può notare dalla fig. 2.8.3, che ne riporta l’andamento per una
goccia di rapporto 27/26, sottoposta a campi elettrostatici di intensità crescente. Come era prevedibile,
all’aumentare dell’intensità, a parità di tempo aumenta lo spostamento.
Fig. 2.8.3: ascissa del baricentro di una goccia 27/26 EMIM/BF4 sottoposta a campo elettrostatico
Più interessante dal punto di vista dell’emissione di ioni sono le figure 2.8.4 - 6, riferite al solito tipo di
goccia, che riportano i massimi spostamenti, realizzati dagli ioni più lontani, su ciascuno dei tre assi
coordinati. Alle intensità più basse del campo risulta essere presente uno spostamento di ioni dal
baricentro sull’asse delle ordinate maggiore rispetto alle intensità più elevate, contro ciò che ci si
aspetterebbe, tuttavia lo si può spiegare con la distribuzione di cariche nello spazio. All’aumentare
dell’intensità, sempre più ioni sono emessi, impartendo una quantità di moto anche lungo le direzioni ±y
e ±z, che comunque risulta mediamente inferiore rispetto a quella nella direzione del campo
elettrostatico, come ci si poteva aspettare.
74
______________________________________________ Simulazione molecolare di un getto di droplets
In alto da sinistra, figg. 2.8.4, 5: distribuzione di
ordinate delle molecole di una goccia di
rapporto 27/26 e delle ascisse della stessa
In basso, fig. 2.8.6: distribuzione di quote delle
molecole di una goccia di rapporto 27/26
Infine, si riporta uno studio degli effetti dell’agitazione termica sul movimento delle molecole. Per una
goccia di rapporto 8/7 si implementano simulazioni a diverse temperature, generate casualmente, a
parità di posizione iniziale e geometria della goccia, e di campo elettrostatico. I risultati sono riportati in
figura 2.8.7. Durante i primi 10 picosecondi, si sviluppa una differenza di più di 100 Ångstrom dovuta
alla variazione dello stato termico iniziale, che risulta perciò tanto più significativa quanto più il valore
del campo elettrostatico applicato cala.
Fig. 2.8.7: ascissa degli atomi più esterni per sei simulazioni di una goccia 8/7 EMIM/BF4 con distribuzione
casuale di velocità termica iniziale
Riassumendo, si può osservare che la transizione al regime di emissione ionico ha luogo gradualmente
all’aumentare dell’intensità campo elettrostatico applicato. La dinamica è influenzata dall’agitazione
termica, specialmente per basse intensità del campo elettrostatico. L’energia richiesta per rimuovere un
75
I principali concetti di propulsione elettrica _________________________________________________
singolo ione da una goccia è determinata dalla risultante delle forze applicate ad esso e dalla sua energia
termica traslazionale istantanea; perciò se si applica una forza elettrostatica, quale sia il primo ione
espulso dipende dalla sua posizione (le forze coinvolte sono posizionali) ed energia termica. A intensità
elevate, il campo elettrostatico è sufficiente a vincere la maggior parte delle forze di attrazione e l’intera
goccia cessa di esistere. Il comportamento a lungo termine del getto di ioni dipende dal moto termico
iniziale e da effetti dovuti alla distribuzione delle cariche nello spazio. Il processo di ionizzazione non dà
necessariamente luogo a singoli ioni, infatti a intensità del campo sufficientemente basse, una varietà di
dimensioni di cluster può essere prodotta.
Nell’ambiente tipico del teatro operativo dei propulsori spaziali, la temperatura scende a pochi gradi
Kelvin, perciò è logico aspettarsi, a parità delle altre condizioni, intensità del campo necessario a
produrre un getto di ioni maggiore. La dispersione, in un getto di ioni, di quantità di moto nelle direzioni
ortogonali all’asse della spinta può essere considerata come una delle cause di perdite di potenza ed
energia propulsiva, inevitabile d’altro canto se si vogliono accelerare delle molecole elettricamente
cariche, le quali finiscono con l’interagire respingendosi. Collimare una fascio di particelle elettrizzate
rappresenta un’interessante applicazione dell’ottica ionica.
2.9 Gli elettrodi estrattori e di accelerazione
L’elettrodo estrattore ha due compiti: ionizzare il propellente ed accelerarlo alla sua velocità finale c. È
vantaggioso separare le due funzioni, complicando l’architettura del sistema elettrico con l’aggiunta di
un elettrodo acceleratore, come esemplificato in fig. 2.9.1. Dalle posizioni del paragrafo 2.1 infatti si può
notare che la corrente è proporzionale alla portata in massa, e la tensione, detta tensione di
accelerazione, controlla la velocità di uscita. Con due elettrodi è possibile decidere quale portata
realizzare con la tensione all’estrattore indipendentemente dalla velocità c, sinonimo dell’impulso
specifico, regolata dalla tensione all’acceleratore. Questa è mantenuta negativa per i motivi illustrati al
paragrafo 2.4, mentre il valore della tensione dell’estrattore viene regolata a seconda delle necessità,
rimanendo sulle migliaia di volt.
La flessibilità d’impiego è notevolmente migliorata: a parità di potenza fornita, per manovre rapide
(d’assetto o d’orbita) è possibile scegliere una spinta elevata e un basso impulso specifico, per manovre
più prolungate è ottimale il contrario.
76
___________________________________________________ Gli elettrodi estrattori e di accelerazione
Fig. 2.9.1: configurazione di un FEEP a due elettrodi
Una volta fatta luce sulla dinamica del propellente accelerato, è necessario chiarire in che modo venga
effettivamente realizzato il campo elettrostatico tra un emettitore e l’elettrodo estrattore ed
eventualmente tra gli elettrodi estrattore ed acceleratore (è proprio questa la soluzione adottata per
iEPS); inoltre bisognerà tenere conto anche della configurazione ad emettitori multipli, che influenza
pesantemente la distribuzione di potenziale e campo elettrostatico nello spazio.
I problemi pratici che si affrontano sono, in prima battuta, almeno tre. In primo luogo, l’intensità del
vettore campo elettrico deve essere sufficientemente elevata (dell’ordine di 1 V/μm) in vicinanza
dell’emettitore in modo da consentire la formazione del cono di Taylor. Essendo il problema statico,
sussiste una relazione semplice tra il vettore campo elettrico E ed il potenziale :
(2.9.1)
La quale suggerisce che, per aumentare l’intensità di E a parità di tensione V tra gli elettrodi, è d’aiuto
avvicinare emettitore ed elettrodo, o i due elettrodi, favorendo così anche la compattezza del sistema.
In questo modo il cono di Taylor si può realizzare applicando una tensione che sia alla portata degli
accumulatori di un comune veicolo spaziale. Inoltre, il gradiente locale del campo scalare
deve
dirigere le cariche estratte nella direzione desiderata e minimizzare le deviazioni delle traiettorie delle
particelle, cioè limitare l’energia investita che non produce spinta utile. Se il progetto di un singolo
emettitore a capillare isolato, ad esempio, risulta abbastanza semplice, quando si tratta di realizzare un
MEMS, la considerevole densità di emettitori, intorno a 4 - 6 per mm2 per iEPS, dettata dalla richiesta di
una certa densità di spinta (spinta per unità di superficie dell’array), si scontra con la necessità di
distanziare gli emettitori per ridurne le interazioni reciproche, complicando il problema.
Se si trascura l’influenza delle cariche estratte ed accelerate, come d’altronde si era già fatto per la 2.9.1,
questa equazione, accoppiata all’irrotazionalità del vettore E, conduce all’equazione, lineare, di Laplace:
(2.9.2)
Che, associata alle opportune condizioni al contorno, può essere risolta. Nota la funzione , le leggi di
Newton possono essere applicate per determinare le traiettorie delle cariche, siano esse ioni o gocce. È
chiaro che la soluzione del problema ai valori al contorno dipende dalla geometria del sistema; pur
77
I principali concetti di propulsione elettrica _________________________________________________
rimanendo in ambito elettrostatico è spesso necessario ricorrere ad un codice di calcolo, come per gli
esempi che si riportano nel seguito.
Dal punto di vista qualitativo, è utile esaminare il campo elettrostatico a valle di una matrice di
emettitori al variare della geometria dell’elettrodo estrattore. Si ignorano il processo di formazione delle
molecole eiettate e il loro moto all’interno del campo, e si assume che le superfici dei coni di Taylor,
fatte di fluido conduttore, siano equipotenziali ed allo stesso potenziale degli emettitori. Per questi
ultimi si sono scelte tre configurazioni: una lamina con un ampio foro centrale, la più semplice da
realizzare, una griglia elettrostatica ideale, relativamente semplice da produrre, e una piastra con una
matrice di fori allineati agli emettitori, la più complessa nella realizzazione, anche per l’accurato
allineamento richiesto. Tali possibilità sono mostrate nelle figure 2.9.2, 2.9.3. I risultati di una
simulazione al calcolatore, ad esempio con il programma SIMION, evidenziano i seguenti fatti:
Una griglia ideale mette a disposizione, su tutta la superficie, l’intero potenziale dell’elettrodo
per accelerare gli ioni. Questi si muovono lungo l’asse della spinta, tutti alla stessa velocità,
senza componenti in direzioni indesiderate. È il risultato migliore desiderabile nella pratica.
Al contrario, l’elettrodo con un singolo foro produce i risultati peggiori, pur essendo il più
semplice da fabbricare: anche nel caso di un piccolo array di soli sette emettitori, le
accelerazioni ottenute sono le minime tra le tre alternative. Il potenziale risulta fortemente
variabile, con andamento crescente dal centro del foro verso il bordo; di conseguenza, gli
emettitori vicini al centro avranno più difficoltà a realizzare il fascio di ioni, e anche se il campo è
sufficientemente intenso da permetterlo, rimane un considerevole gradiente di velocità tra le
particelle più lente del centro e quelle più veloci al bordo. Inoltre, la struttura del campo
elettrostatico produce una deviazione radiale del fascio, verso i bordi esterni dell’elettrodo,
causando una perdita di energia e una minor spinta a parità di altri fattori, dovuta a componenti
di velocità non trascurabili in direzione normale all’asse della spinta.
La soluzione a matrice di fori presenta un andamento del potenziale molto simile al caso della
griglia conduttrice ideale; tuttavia i campi si fanno mediamente meno intensi all’aumentare del
raggio dei fori.
78
___________________________________________________ Gli elettrodi estrattori e di accelerazione
A sinistra, fig. 2.9.2: semplici geometrie di elettrodi
estrattori e loro risultante campo di potenziale per un
piano che interseca due emettitori
A destra, fig. 2.9.3: possibili geometrie di un elettrodo
di estrazione perforato e loro risultante campo di
potenziale per un piano che interseca due emettitori
Nel caso del singolo foro, la tensione di accelerazione al suo centro diminuisce rapidamente, a partire
dal potenziale applicato, all’aumentare del diametro del foro, come mostrato in figura 2.9.4.
Aumentando la separazione con l’estrattore si può mantenere un potenziale più elevato, ma se si vuole
mantenere lo stesso modulo del campo elettrostatico è necessario applicare un potenziale maggiore,
come si può dedurre anche dalla (2.9.1). Ovviamente anche la velocità di uscita dall’emettitore risente di
una tensione minore, ma in modo meno marcato, scalando con la radice quadrata di Vcl. Leggere
riduzioni di velocità si hanno passando dal caso della griglia ideale a quello della piastra forata, e
all’aumentare del diametro dei fori. Il decremento massimo si ha per la lamina con un unico foro, che
per sette emettitori realizza una riduzione di velocità del 33% rispetto alla griglia ideale, a parità degli
altri fattori.
Fig 2.9.4: tensione al centro dell’elettrodo di estrazione e velocità delle gocce:
1000 V di tensione applicata per una separazione di 200 μm e 2500 V per 500 μm
79
I principali concetti di propulsione elettrica _________________________________________________
Concludendo, si può osservare che, tra le tre alternative proposte, solo quella ad unico foro centrale
comporta una significativa penalizzazione in termini di intensità del campo elettrico necessario a
produrre un electrospray da tutti gli emettitori (e quindi del costo in termini di energia), uniformità della
spinta e rendimento. La scelta progettuale operata per iEPS appare perciò ragionevole, avendo adottato
una configurazione a due elettrodi, estrattore ed acceleratore, e a fori multipli e coassiali agli emettitori.
2.10
Le principali fonti di dissipazioni
A conclusione della descrizione del sistema propulsivo di AraMiS, si esaminano le possibili cause di
dissipazione per un tipico propulsore FEEP. Si riconsideri il processo di ionizzazione ed accelerazione del
propellente, senza dimenticare che le proprietà ricavate al paragrafo 2.1 sono valori medi ed ottimali. È
ben noto dalla fisica che una carica in accelerazione emette onde elettromagnetiche, non considerate
nello studio svolto, che comportano un dispendio energetico. Di conseguenza gli ioni uscenti dal
propulsore ricevono la maggior parte dell’energia di accelerazione di progetto, ma non tutta, in genere
si perdono tra i 5 e gli 8 eV; inoltre, bisogna tenere a mente che l’energia cinetica degli ioni allo scarico è
descritta da uno spettro continuo, e non vale esattamente quanto l’energia elettrica in ingresso nel
sottosistema, ad esempio perché la tensione di accelerazione varia leggermente nel tempo intorno al
valore imposto, o il rapporto carica-massa varia da molecola a molecola; durante la fase di
accelerazione, esse interagiscono con la possibilità di rompersi e deviare dall’asse della spinta (problemi
di ottica ionica), la componente di velocità utile sarà dunque Vcosς, dove ς è l’angolo tra la velocità e
l’asse del cono di Taylor. Tutto ciò comporta perdite dello stesso ordine delle precedenti. Gli stessi
fenomeni, nei propulsori al plasma, comportano perdite ben più alte di centinaia di eV. Come anticipato
nel paragrafo 2.2, l’efficienza dei propulsori FEEP risulta tra le più elevate della categoria elettrica. Coi
fenomeni descritti finora, si arriva ad efficienze del 98%. Altre dissipazioni sono dovute, per la maggior
parte, alla polidispersività delle specie emesse (opposta al concetto di monodispersività del paragrafo
2.3). Bisogna pensare che, se il liquido ionico è composto da cationi C ed anioni A, senza solventi, gli ioni
emessi saranno della forma (CA)nC o (CA)nA per tensioni applicate rispettivamente positive o negative. n
è chiamato grado di solvatazione degli ioni nella fase di vapore, e in normali condizioni operative
assume i valori 0 e 1. Tale polidispersività produce quindi cariche di differenti masse, accelerate dallo
stesso campo elettrostatico. Di conseguenza esistono, nello spray, velocità relative non nulle, rispetto
alla velocità media globale, che si traducono in calore e portano il rendimento all’80-85%.
Fortunatamente però, la maggior parte delle conseguenze negative si hanno al di fuori del sottosistema
propulsivo, evitando surriscaldamenti e la conseguente necessità di predisporre sistemi di dispersione
del calore, come anticipato al paragrafo 2.2.
80
______________________________________________________________ Le curve di time - of - flight
2.11
Le curve di time - of - flight
Si conclude la descrizione dei sistemi propulsivi electrospray presentando un metodo sperimentale per
valutarne le prestazioni. Esso consiste nel misurare la corrente emessa dallo spray in funzione del tempo
in regime stazionario per poi interrompere improvvisamente l’alimentazione di propellente. Gli ioni
giungeranno alla stazione di misura, oltre l’elettrodo estrattore, dal più leggero al più pesante, cioè in
ordine crescente di grado di solvatazione. La cosiddetta curva di Time Of Flight (TOF) ha perciò
andamento decrescente e tendente a zero; in condizioni ideali assumerebbe l’andamento del grafico di
figura 2.11.1.
Fig 2.11.1: curva di TOF ideale
Una data discontinuità nella curva rappresenta il tempo di arrivo finale di una particolare specie
molecolare, ed assumendo che tutta la materia emessa sia anche misurata, essa rappresenta il
contributo di ogni specie i-esima di ioni alla formazione della corrente totale di regime. Nota questa, la
relativa portata in massa si può ottenere con lievi modifiche alla relazione corrente - portata in massa
2.1.13:
(2.11.1)
Dove mi è la massa molecolare della specie in oggetto ed e la carica fondamentale. Portata e corrente
totale sono date, come nel paragrafo 2.1, dalla sommatoria estesa a tutti i gradi di solvatazione. Nelle
normali condizioni operative, quelli dominanti sono il primo (n = 1) ed il nullo (n = 0), con percentuali
rispettivamente del 40% e del 60% in regime ionico. Un diagramma TOF reale, come quelli in figura
2.11.2, differisce dalla versione ideale per le collisioni molecolari e la cessazione di emissione non
istantanea.
Dal grafico del time of flight si possono anche derivare alcuni parametri propulsivi chiave, in particolare
spinta ed impulso specifico. Assumendo rendimento unitario, la 2.1.14 fornisce
(2.11.2)
81
I principali concetti di propulsione elettrica _________________________________________________
Considerando un gruppo di particelle rilevate nell’intervallo δt, la corrente associata si ottiene dalla
caratteristica TOF:
(2.11.2)
Le corrispondenti portata in massa e spinta infinitesime si possono ricavare come
,
(2.11.3, 4)
I valori totali si possono ottenere per integrazione tra t = 0 e t → ∞, a cui ovviamente la corrente è nulla.
Usando l’integrazione per parti si arriva a
(2.11.5)
(2.11.6)
Gli altri parametri possono essere ricavati con le relazioni del paragrafo 2.1. Il termine sotto segno di
integrale al membro di destra della 2.11.6 non è altro che la carica trasferita.
Delle curve di TOF reali sono mostrate in figura 2.11.2, per il liquido ionico EMI-Beti (EMI=1-ethyl-3methylimidazolium, 1-etil-3-metilimidazolio, Beti=[(C2F5SO2)2N−]), al variare di temperatura del fluido,
portata (sinonimo della pressione del liquido) e tensione dell’emettitore. Le fluttuazioni,
particolarmente estese per t=0, sono dovute ad un’interferenza elettrica dovuta al sistema di misura e
non sono considerate nel seguito. Come osservato nel paragrafo 2.3, per temperature sufficientemente
elevate si ha la transizione, graduale, da regime droplet, colloidale a regime ionico. A 22 °C, il primo
gradino a 5 μs, corrispondente all’emissione di ioni, lascia spazio a code rilevanti, che fanno pensare ad
un regime ancora prevalentemente colloidale, con abbondanti gocce rilevate da 100 a 400 μs. A 56 °C,
gli ioni sono già dominanti, e le rimanenti gocce sono molto più piccole di prima (30 μs). Il regime ionico
è raggiunto a 119 °C nei casi a e b. Il contributo delle gocce è insignificante in queste condizioni.
82
______________________________________________________________ Le curve di time - of - flight
Fig 2.11.2: curve di TOF reali
83
84
__________________________________________________________ Le caratteristiche del propulsore
Capitolo 3
3 Analisi delle prestazioni del sottosistema
propulsivo
3.1 Le caratteristiche del propulsore
Prima di procedere all’analisi delle prestazioni del sottosistema propulsivo, installato con l’architettura
descritta nell’introduzione, se ne riassumono le caratteristiche di interesse in un punto di
funzionamento tipico raccogliendole nella seguente tabella.
Spinta nominale per propulsore
Impulso specifico
Numero di array per tile
Massima massa di propellente disponibile per
array
T [mN]
Isp [s]
n
0,1
3500
2
Mp,max [mg]
147,6
Fig 3.1.1: architettura del propulsore iEPS
È possibile stimare la massa di propellente a disposizione grazie alla conoscenza delle dimensioni del
serbatoio (in figura 3.1.1) e della densità del propellente, indicata al capitolo 2. La stima è per eccesso,
poiché non tiene conto del volume occupato dal metallo poroso. Il consumo di propellente m è un
dato critico per ogni manovra; la quantità a disposizione dipende, oltre che dal volume del serbatoio,
dalla fase della missione considerata. Al momento del de-orbiting, ad esempio, il propellente a
85
Analisi delle prestazioni del sottosistema propulsivo __________________________________________
disposizione sarà minimo, ed occorre valutare se tale manovra è realizzabile. Si vuole infatti evitare che
il satellite continui a vagare intorno alla propria orbita, rappresentando un pericolo per gli altri veicoli e
per eventuali astronauti. L’altro parametro prestazionale di interesse è il tempo di manovra t; esso
diventa critico se si manifesta la necessità di una manovra rapida, ad esempio per evitare un ostacolo
che ha invaso la traiettoria. Tipicamente, dati i bassi livelli di spinta realizzati, i propulsori electrospray
richiedono molto più tempo rispetto ai propulsori chimici per concludere una manovra, a parità di altri
fattori.
3.2 Le manovre orbitali
Si esamina ora la capacità dell’installazione propulsiva di cambiare i parametri orbitali della traiettoria
del satellite.
Conoscendo i dati del paragrafo precedente 3.1 è possibile calcolare il delta V necessario a realizzare
alcune manovre orbitali standard. Noto questo, con l’equazione del razzo di Tsiolkovsky (2.1.5), nota la
massa finale m di iEPS, si può calcolare il consumo di carburante:
(3.2.1)
Il tempo di manovra è presto ricavato dalla seconda legge della dinamica, nel caso di spinta costante:
(3.2.2)
Poiché l’architettura modulare di iEPS consente di ospitare diversi tipi di payload, si è studiato un range
di masse che va da 1 a 10 kg.
La soluzione di Edelbaum del paragrafo 1.5 (1.5.12) fornisce la variazione di velocità necessaria ad un
cambio di quota e di inclinazione; verrà considerata la variazione di un solo parametro orbitale per volta.
Per i grafici ricavati si rimanda al fondo del paragrafo.
A parità di inclinazione, si calcolano le prestazioni per un orbital climb ad una quota r a partire da una
quota minima di 120 km, il limite dell’atmosfera terrestre, segnalata col pedice 0. Il V non dipende
dalla direzione della spinta applicata, perciò le considerazioni ricavate valgono anche per il de-orbiting.
La 1.5.12 si riduce a:
μ
μ
(3.2.3)
In un piccolo intervallo di raggi la relazione tra V ed r è assimilabile ad una retta, come mostra la figura
3.2.1. L’intervallo di raggi selezionato è stato scelto sulla base del massimo consumo di propellente
ammissibile, con l’aiuto di figura 3.2.2. Dato il legame esponenziale tra m e V, l’aumento di massa
finale del satellite, tra 1 kg e 10 kg, produce un aumento non lineare del consumo, diminuendo le
prestazioni. I cambiamenti di quota ammessi sono dell’ordine dei kilometri: è preferibile, se possibile,
86
____________________________________________________________________ Le manovre orbitali
che il satellite sia rilasciato dal lanciatore ad una quota molto prossima a quella di missione; un
eventuale de-orbiting non può garantire grandi diminuzioni di altezza, tuttavia la resistenza
aerodinamica dell’atmosfera, non contemplata in questo studio, contribuisce a diminuire l’energia
cinetica del satellite, specie a quote ridotte. Il tempo di manovra, indicato in figura 3.2.3, è dell’ordine
dei giorni; non è possibile perciò effettuare manovre rapide, ad esempio per evitare corpi che
eventualmente abbiano invaso l’orbita.
Si esamina ancora la manovra, partendo però da una quota di 300 km (figure 3.2.4, 5, 6). Le prestazioni
sono essenzialmente analoghe, con un leggero calo del V, sempre dell’ordine dei m/s, che si traduce in
consumi e tempi di manovra lievemente inferiori, a parità degli altri fattori.
Ora viene mantenuta fissa la quota del satellite, a 200 km, e si varia l’inclinazione dell’orbita. In tal caso
la soluzione di Edelbaum (1.5.12) assume la forma:
π
(3.2.4)
Come prima, lo stretto range di m ammissibili riduce il grafico dell’equazione precedente 3.2.4 (figura
3.2.7) ad una retta. Ora però le variazioni consentite sono davvero ristrette, dell’ordine di 10-4 radianti,
cioè pochi centesimi di grado. È indispensabile che il lanciatore provveda a fornire l’inclinazione orbitale
adeguata per la missione. Al variare della massa finale m, i grafici di consumi e tempi di manovra hanno
andamenti analoghi ai precedenti, si parla nuovamente di durate dell’ordine di giorni, con l’impossibilità
di manovre celeri.
Per cercare di ovviare alla scarsezza della prestazione, si può provare a considerare valori maggiori per il
raggio dell’orbita, come discusso al paragrafo 1.5. I grafici delle figure 3.2.10, 11, 12 valutano le
caratteristiche di una variazione di inclinazione effettuata ad una quota di 1000 km. I miglioramenti di
consumo, tempo di manovra e V che si ottengono sono ancora modesti, a parità degli altri fattori.
Viste le scarse prestazioni, per quanto riguarda le manovre d’orbita, si può pensare di aumentare il
propellente a disposizione. Ciò si può fare con almeno due strategie: rimpiazzare una sezione di
honeycomb della tile con nichel poroso, che potrebbe peggiorare significativamente la resistenza
strutturale, oppure inserire i serbatoi supplementari all’interno dei pannelli a sandwich, collegandoli tra
loro tramite piccoli fori, senza intaccare la resistenza alle azioni meccaniche. Nel seguito si
considereranno perciò le prestazioni delle stesse manovre, per masse da 1 kg a 10 kg, senza limitazioni
causate dal propellente, per fornire una stima dei consumi richiesti e supportare ulteriori decisioni
progettuali. Sarà necessario scartare carichi di propellente eccessivi, che limitano il budget di peso del
payload, e manovre di durata eccessiva, che possono creare difficoltà nella pianificazione della missione.
Si considera in primo luogo l’orbital climb (od il deorbiting), descritto nei grafici delle figure 3.2.13 - 15.
I consumi richiesti sono dell’ordine delle decine di grammi, cioè alcuni centrimetri cubici, in volume. Il
tempo richiesto non supera in nessun caso l’anno, caratteristica accettabile per un deorbiting ad
esempio. È chiaro che, stante l’equazione del consumo di propellente (3.2.1), la spesa di propellente non
dipende dalla durata temporale del deorbiting (e ciò vale anche per la altre manovre); i casi studiati in
seguito rappresentano un ottimo in termini di tempo, ottenuto grazie alla massima spinta della coppia di
propulsori, ma ciò non cambia la quantità di propellente impegato.
Si può fornire anche una stima dei consumi elettrici della PPU (Power Processing Unit); infatti, noto
l’impulso specifico, con la relazione fondamentale sulla velocità degli ioni espulsi si può stimare la
tensione all’elettrodo estrattore (2.1.14), e se la corrente emessa è nota (1 μA), si conosce la potenza
elaborata. Dal momento che la spinta durante la manovra è costante, per ottenere il consumo di energia
elettrica basta moltiplicare la potenza elettrica per la durata della manovra. Il contributo dell’elettrodo
87
Analisi delle prestazioni del sottosistema propulsivo __________________________________________
acceleratore si può considerare trascurabile: si parla di -15 V contro 1470 V dell’estrattore, a parità di
correnti. Nel caso di variazione di raggio orbitale i consumi elettrici sono dell’ordine di 10 kJ. Tutte le
grandezze stimate hanno andamento praticamente lineare nell’intervallo di quote considerate, la
pendenza delle rette assume perciò un significato fisico rilevante, ed è riportato nelle tabelle 3.2.1 - 3.
La variazione di inclinazione del piano orbitale (figg. 3.2.16 - 18) è una manovra più impegnativa della
precedente, e non tutti gli angoli sono raggiungibili; è stata arrestata a 2 rad 114,59°, in accordo col
campo di validità della soluzione di Edelbaum. Si considera la quota più sfavorevole possibile, 120 km,
per ottenere una stima cautelativa, anche se non ha senso pratico. Nel caso di massa di 10 kg, ha poco
senso impegnarne la metà col propellente, potrebbe essere meglio stivarne al massimo 1 kg, potendo
raggiungere i 15° di distanza angolare; impegnando sempre un decimo della massa disponibile, per 1 kg
si possono realizzare solo pochi gradi. Il tempo massimo di manovra sarebbe quindi di 5 anni per massa
massima, il che permette di considerare le curve del tempo come rettilinee. I consumi elettrici
aumentano in ragione del tempo di manovra, e sono dell’ordine dei 100 kJ. I coefficienti angolari della
zona lineare per ogni massa sono raccolti nelle tabelle 3.2.4 - 6.
Una possibile configurazione di AraMiS prevede quattro tiles per faccia del satellite (chiamata
configurazione a quattro tiles nel seguito, in opposizione a quella semplice); per simularne le prestazioni
basta cambiare la massa totale, che varia tra 10 e 50 kg, e il braccio delle forze propulsive, all’interno del
codice.
La variazione di raggio (figg. 3.2.19 - 21 e tabb. 3.2.7 - 9), com’era prevedibile, comporta un maggior
dispendio di propellente, sul centinaio di grammi Il tempo necessario alla manovra aumenta
notevolmente, passando ad alcuni anni, valore ancora accettabile per un deorbiting.
Nel presente caso, quest’ultima manovra (figg 3.2.22 - 24 e tabb. 3.2.10 - 12) risulta al di sopra delle
capacità del sistema propulsivo. A cominciare dai consumi di propellente, con il criterio precedente per
la ripartizione delle masse, se si utilizzano ad esempio 10 kg dei 100 disponibili, sono ammesse variazioni
di al più 30° (il caso dei 10 kg è riportato sopra). Osservando il grafico dei tempi di manovra si nota che
tale operazione durerebbe più di 25 anni, dato non accettabile. Considerando i 25 anni come tempo
massimo, si è limitati a circa 50° per una massa di 14,44 kg, con un dispendio di circa 5 kg, comunque
eccessivo; inoltre il modello prevede un semplice andamento lineare per tali curve nel campo
ammissible. I consumi energetici sono i massimi tra quelli considerati finora, intorno al megajoule.
Come era prevedibile, l’aumento di massa degrada sempre le prestazioni ottenibili, a parità di altri
fattori; ciò vale anche per le manovre d’assetto studiate nel seguito.
Si riporta a fondo paragrafo il codice Matlab scritto per sviluppare il modello.
Infine si considera la resistenza aerodinamica Fd. Essa tende a diminuire l’energia cinetica del satellite, è
perciò necessario che la sua azione sia neutralizzata costantemente da una spinta T in direzione della
velocità. La resistenza aerodinamica massima equilibrabile è perciò di 0,1 mN.
clear all
close all
clc
%immissione/calcolo specifiche
%misure espresse in SI
No_m_fin=10; %numero di masse (equispaziate tra 5 e 10) immesse nel calcolo,
2 per iniziare
m_fin=linspace(1,10,No_m_fin);
mu=3.986*10^14;
T_nom=0.1*2*10^-3;
c=3500*9.806;
88
____________________________________________________________________ Le manovre orbitali
m_p_max=2*1247.9*59.15*10^(-9) %stima della massima massa di propellente
utilizzabile, con le attuali riserve, senza tenere conto della porosità
% cambiamento di quota tra o. circolare iniziale di raggio r_0
% e finale di r_max con delta i=0
r_0=(6371+300)*10^3;
v_0=sqrt(mu/r_0);
r_max=(6371+500)*10^3;
No_r=1000;
r=linspace(r_0,r_max,No_r);
i=0;
for j=1:No_r
v(j)=sqrt(mu/r(j));
delta_v(j)=sqrt((v_0)^2-2*v_0*v(j)*cos(i*pi/2)+(v(j))^2);
for k=1:No_m_fin
m_p(k,j)=m_fin(k)*(exp(delta_v(j)/c)-1); %suppongo 1 kg, c'è solo 1
fattore di scala se vario la massa_fin
delta_t(k,j)=delta_v(j)*(m_fin(k))/T_nom; %mantengo la massa finale,
m_p è trascurabile
el(k,j)=10^(-6)*c^2/(2*400000)*delta_t(k,j);
end
end
%
%
%
%
plot(r,delta_v);
plot(r,m_p);
plot(r,delta_t);
plot(i,el)
%cambiamento di inclinazione in o. circolare di raggio r_0
r_0=(6371+1000)*10^3;
v_0=sqrt(mu/r_0);
No_i=1000;
i=linspace(0,pi,No_i);
for j=1:No_i
delta_v(j)=sqrt(2*(v_0)^2-2*(v_0)^2*cos(i(j)*pi/2));
for k=1:No_m_fin
m_p(k,j)=m_fin(k)*(exp(delta_v(j)/c)-1); %suppongo 1 kg, c'è solo 1
fattore di scala se vario la massa_fin
delta_t(k,j)=delta_v(j)*(m_fin(k))/T_nom; %mantengo la massa finale,
m_p è trascurabile
el(k,j)=10^(-6)*c^2/(2*400000)*delta_t(k,j);
end
end
%
%
%
%
plot(i,delta_v);
plot(i,m_p);
plot(i,delta_t);
plot(i,el)
89
Analisi delle prestazioni del sottosistema propulsivo __________________________________________
Dall’alto, fig 3.2.1, 2, 3: prestazioni per orbital climb per masse da 1 kg a 10 kg; per figura 3.2.2, in ordine
crescente da destra verso sinistra, per fig. 3.2.3, in ordine crescente dal basso verso l’alto
90
____________________________________________________________________ Le manovre orbitali
Dall’alto, fig 3.2.4, 5, 6: prestazioni per orbital climb a partire da una quota di 300 km per masse da 1 kg a 10 kg;
per figura 3.2.4, in ordine crescente da destra verso sinistra, per fig. 3.2.5, in ordine crescente dal basso verso
l’alto
91
Analisi delle prestazioni del sottosistema propulsivo __________________________________________
Dall’alto, fig 3.2.7, 8, 9: prestazioni per variazione di inclinazione per masse da 1 kg a 10 kg; per figura 3.2.8, in
ordine crescente da destra verso sinistra, per fig. 3.2.9, in ordine crescente dal basso verso l’alto
92
____________________________________________________________________ Le manovre orbitali
Dall’alto, fig 3.2.10, 11, 12: prestazioni per variazione di inclinazione a quota 1000 km per masse da 1 kg a 10 kg;
per figura 3.2.11, in ordine crescente da destra verso sinistra, per fig. 3.2.12, in ordine crescente dal basso verso
l’alto
93
Analisi delle prestazioni del sottosistema propulsivo __________________________________________
m [kg]
1
2
3
4
5
6
7
8
9
10
km/g
62,16
31,08
20,72
15,54
12,43
10,36
8,88
7,77
6,907
6,216
m [kg]
1
2
3
4
5
6
7
8
9
10
km/anno
11500
5752
3834
2876
2298
1917
1643
1438
1277
1147
m [kg]
1
2
3
4
5
6
7
8
9
10
kj/km
0,004231
0,008457
0,01215
0,01619
0,02014
0,02426
0,02823
0,03239
0,03631
0,04033
Dall’alto: figg. 3.2.13, 14, 15: prestazioni per una variazione di raggio ad inclinazione costante, per masse da 1 kg
a 10 kg, per figg. 3.2.13, 14 da sinistra verso destra, per fig. 3.2.15 dal basso verso l’alto
Dall’alto: tabb. 3.1.1, 2, 3: coefficienti angolari delle rette di prestazione suddette
94
____________________________________________________________________ Le manovre orbitali
m [kg]
1
2
3
4
5
6
7
8
9
10
deg/kg
148,7
74,34
49,56
37,17
29,74
24,78
5,969
18,58
16,52
14,86
m [kg]
1
2
3
4
5
6
7
8
9
10
deg/anno
32,56
16,32
10,84
81,3
6,501
5,421
4,658
4,076
3,625
3,259
m [kg]
1
2
3
4
5
6
7
8
9
10
kj/deg
1,529
3,058
4,586
6,114
7,642
9,172
10,7
12,23
13,76
15,29
In alto, da sinistra, fig 3.2.16, 17, 18: prestazioni per una variazione di inclinazione a quota 120 km, per masse da
1 kg a 10 kg, per figg. 3.2.13, 14 da sinistra verso destra, per fig. 3.2.15 dal basso verso l’alto
Dall’alto: tabb. 3.1.4, 5, 6: coefficienti angolari delle rette di prestazione suddette
95
Analisi delle prestazioni del sottosistema propulsivo __________________________________________
m [kg]
10
14,44
18,89
23,33
27,77
32,22
36,67
41,11
45,55
50
km/g
6,223
4,3
3,292
2,667
2,245
1,937
1,701
1,515
1,364
1,249
m [kg]
10
14,44
18,89
23,33
27,77
32,22
36,67
41,11
45,55
50
km/anno
1151
797,9
608,6
492
413,1
356,3
312,2
279,8
252,3
230,2
m [kg]
10
14,44
18,89
23,33
27,77
32,22
36,67
41,11
45,55
50
kj/km
0,04
0,06
0,0762
0,0941
0,112
0,1299
0,1479
0,1658
0,1838
0,2017
In alto, da sinistra, fig 3.2.19, 20, 21: prestazioni per una variazione raggio ad inclinazione costante, per masse da
10 kg a 50 kg, per figg. 3.2.19, 20 da sinistra verso destra, per fig. 3.2.21 dal basso verso l’alto
Dall’alto: tabb. 3.1.7, 8, 9: coefficienti angolari delle rette di prestazione suddette
96
____________________________________________________________________ Le manovre orbitali
deg/kg
15,1028
10,45548
7,995669
6,472548
5,436917
4,686994
4,118904
3,673605
3,31521
3,020503
deg/anno
3,01E+00
2,09E+00
1,59E+00
1,29E+00
1,08E+00
9,35E-01
8,22E-01
7,33E-01
6,61E-01
6,02E-01
kj/deg
14,24688
20,58444
26,91678
33,24911
39,564
45,89633
52,22867
58,561
64,89333
32,15011
3.
3
Le
m
an
ov
re
d’
In alto, da sinistra, fig 3.2.22, 23, 24: prestazioni per una variazione di inclinazione a quota 120 km, per masse
da 10 kg a 50 kg, per figg. 3.2.22, 23 da sinistra verso destra, per fig. 3.2.24 dal basso verso l’alto
Dall’alto: tabb. 3.1.10, 11, 12: coefficienti angolari delle rette di prestazione suddette
97
Analisi delle prestazioni del sottosistema propulsivo __________________________________________
3.3 Le manovre d’assetto
Si intendono calcolare le prestazioni per una rivoluzione di iEPS, col modello impostato al paragrafo
1.10. I parametri di interesse sono gli stessi determinati al paragrafo precedente: tempo impiegato e
consumo di propellente. Prima di procedere, è necessario determinare la relazione tra il propellente
consumato e gli altri parametri, tramite la definizione di impulso specifico per spinta costante.
Mantenendo le stesse notazioni del paragrafo 1.10, si definiscono il consumo di propellente in fase di
accelerazione e decelerazione angolare rispettivamente come m1 e m2. La forza sviluppata da ciascun
propulsore, costante, sia F; si ha:
(3.3.1)
θ
(3.3.2)
θ
(3.3.3)
θ
θ
θ
θ
(3.3.4)
I risultati sono riportati a fondo paragrafo. Con riferimento ai grafici delle figure 3.3.1 - 4, si discutono le
prestazioni per una rivoluzione completa al variare dell’angolo θ1, percorso nella fase di accelerazione,
tra 0 e π, a condizioni iniziali nulle. Se questo angolo è molto piccolo, la fase di accelerazione non
fornisce abbastanza velocità angolare, e il tempo di manovra T tende ad infinito a causa della fase di
drift;, viceversa, per periodi di accelerazione più estesi, il tempo necessario alla rivoluzione tende
rapidamente ad un valore asintotico, che dipende dalla massa del satellite. L’effetto di questa sul tempo
di manovra non è lineare, pur facendolo rimanere al di sotto dei 5 minuti, per θ1 maggiori di un radiante
(circa 57,3°). Il consumo di propellente ha un andamento opposto, naturalmente, che cresce
all’aumentare dell’angolo θ1, ma presenta ancora una sensibilità non lineare alla massa m, che fa
decadere sempre le prestazioni. Gli ordini di grandezza sono sensibilmente inferiori ai corrispondenti
delle manovre orbitali, intorno ai 10-7 kg. Essendo le manovre di accelerazione e decelerazione
antisimmetriche, la spesa di carburante è identica nelle due fasi, come i loro contributi temporali, a cui
va sommata la durata della fase di drift, che è dominante e differente dalle altre, le quali ricordano il
grafico del consumo di propellente. Sfortunatamente, non è possibile scegliere immediatamente una
ripartizione angolare delle tre fasi ottimale, in quanto le due caratteristiche m e T presentano
andamenti opposti: è necessario trovare un compromesso.
Si può anche ragionare in modo analogo al paragrafo precedente (figg. 3.3.5 - 7), senza farsi limitare
dalla quantità di propellente disponibile nella versione di partenza del propulsore, ed esprimendo le
grandezze in funzione della velocità angolare di drift, che per una rotazione completa può valere al
massimo 0,19 rad/s. Le masse, che varieranno come prima tra 1 e 10 kg e tra 10 e 50 kg, influenzano ora
anche il calcolo del momento d’inerzia; i grafici, quindi, se letti in funzione del momento d’inerzia,
98
___________________________________________________________________ Le manovre d’assetto
consentono di variare anche la forma del satellite. Si riportano i valori del momento d’inerzia
corrispondenti alle varie masse nella tabella seguente.
m [kg]
1
I [kg*m2] 0,1333
2
0,2666
3
0,3993
4
0,5326
5
0,6659
6
0,7993
7
0,9326
8
1,065
9
1,198
10
1,331
m [kg]
I [kg*m2]
14,44
1,9243
18,88
2,515
23,33
3,108
27,77
3,7
32,22
4,292
36,66
4,884
41,11
5,476
45,55
6,068
50
6,66
10
1,331
Al contrario di prima, le relazioni trovate nel seguito sono fortemente non lineari, e le pendenze locali
delle curve non hanno valore globale, perdendo di rilevanza.
Si considera dapprima il consumo di propellente. Con la massima quantità ammessa precedentemente,
si realizzerebbero al massimo alcuni decimi di radiante al secondo; i tempi di manovra sono dell’ordine
dei minuti, con consumi di energia elettrica intorno al decimo di joule. Tale manovra, che non richiede
prestazioni elevate, risulta facilmente realizzabile con iEPS, infatti tale tipo di propulsori è sviluppato
appositamente per il controllo d’assetto, e consente inoltre elevate precisioni nel suo mantenimento. Lo
si mette perciò alla prova con una configurazione a quattro tiles (figg. 3.3.8 - 10).
Le velocità angolari massime permesse sono raggiungibili se si considera il limite originario di 147 mg. I
tempi richiesti sono di un ordine di grandezza in più rispetto alla configurazione semplice, intorno alla
decina di minuti, ma rimangono accettabili. I consumi di energia elettrica aumentano quasi di un ordine
di grandezza, benchè rimangano sempre ridotti.
Si riporta il codice Matlab sviluppato per elaborare il modello.
clear all
close all
clc
%immissione/calcolo specifiche
%misure espresse in SI
Thr=0.0001;
Nom=10;
m=linspace(1,10,Nom);
l=0.16425; %braccio
L=0.175; %dim Tile
g=9.806;
Isp=3500;
theta_min=0.001;
theta_fin=2*pi;
No_theta_1=1000;
theta_1=linspace(theta_min,theta_fin/2,No_theta_1);
%calcolo caratteristiche manovra a condizioni iniziali nulle
M=2*Thr*l;
for i=1:Nom
J(i)=m(i)*L^2/6;
alpha(i)=M/J(i);
for j=1:No_theta_1
t_1(i,j)=sqrt(2*theta_1(j)/alpha(i));
theta_dot(i,j)=alpha(i)*t_1(i,j);
t_3(i,j)=t_1(i,j);
theta_2(j)=theta_fin-2*theta_1(j);
theta_3(j)=theta_1(j);
t_2(i,j)=theta_2(j)/theta_dot(i,j);
T(i,j)=2*t_1(i,j)+t_2(i,j);
99
Analisi delle prestazioni del sottosistema propulsivo __________________________________________
delta_m_1(i,j)=2*Thr*t_1(i,j)/(Isp*g);
delta_m_3(i,j)=2*Thr*t_3(i,j)/(Isp*g);
delta_m(i,j)=delta_m_1(i,j)+delta_m_3(i,j);
el(i,j)=10^(-6)*c^2/(2*400000)*t_1(i,j)*2;
end
end
%plot(theta_1,delta_m_3)
%plot(theta_1,t_1)
%x=linspace(0.001,0.19,No_theta_1);
%plot(x,el)
%plot(x,delta_m)
%plot(x,T)
100
___________________________________________________________________ Le manovre d’assetto
Dall’alto, figg. 3.3.1, 2: prestazioni globali per una rotazione di 360°
101
Analisi delle prestazioni del sottosistema propulsivo __________________________________________
Dall’alto, figg. 3.3.3, 4: durate temporali parziali per una rotazione di 360°
102
___________________________________________________________________ Le manovre d’assetto
Dall’alto: figg. 3.3.5, 6, 7: prestazioni per una rotazione di 2*pi rad, per masse da 1 kg a 10 kg, per fig. 3.2.13 da
sinistra verso destra, per le figg. 3.2.14, 15 dal basso verso l’alto
103
Analisi delle prestazioni del sottosistema propulsivo __________________________________________
Dall’alto: figg. 3.3.8, 9, 10: prestazioni per una rotazione di 2*pi rad, per masse da 10 kg a 50 kg, per fig. 3.3.8 da
sinistra verso destra, per le figg. 3.3.9, 10 dal basso verso l’alto
104
_______________________________________________________Le scelta dell’architettura meccanica
3.4 La scelta dell’architettura meccanica
L’esempio appena svolto prevede l’azionamento di due propulsori (due coppie di array indipendenti),
che producono una rotazione intorno ad un asse corpo del satellite, ed ha il vantaggio di disaccoppiare il
controllo d’assetto da quello orbitale; utilizza inoltre le dimensioni di una configurazione cubica di
Aramis. Si cerca nel seguito di trovare un’organizzazione meccanica che consenta di riprodurre queste
caratteristiche di controllabilità della terna di assi corpo, con una configurazione cubica. È necessario
garantire che su almeno un piano ortogonale ad ogni asse (cioè su ogni faccia del cubo) giaccia almeno
una coppia vettori spinta. La configurazione che rispetta tali richieste è quella di figura 3.4.1; ogni faccia
monta i due propulsori su una sua diagonale, diversa rispetto alla tile opposta, sulle quattro facce
laterali non vi sono propulsori adiacenti, ma è inevitabile che accada con le tile superiori.
Fig 3.4.1: esempio di configurazione meccanica virtuosa
Per ogni verso di rotazione è possibile individuare otto propulsori, quattro per verso di rotazione, la cui
azione produce un momento puro. La possibilità di sfruttare versi di rotazione opposti evita di azionare
una sola coppia di thrusters più a lungo, impiegando meno carburante a scapito di una maggior
complessità del sottosistema. Con quattro propulsori azionati contemporaneamente, la coppia a
disposizione raddoppia, modificando lievemente i calcoli del modello precedente; l’azionamento in
coppia può accadere in caso di malfunzionamento di un’unità, o se si desidera risparmiare propellente:
bisogna infatti considerare, ad esempio, che una faccia è già utilizzata per le manovre orbitali. È facile
notare che altre modalità di installazione (figure 3.4.2 - 5) non garantiscono il disaccoppiamento di
orbita ed assetto, con complicazioni progettuali, o non permettono il movimento intorno ad un asse
corpo, che è anche principale d’inerzia: cambierebbe quindi anche il momento d’inerzia da considerare
nella manovra, che potrebbe rappresentare uno svantaggio, visto che gli assi principali sono a volte
direzioni a momento d’inerzia minimo.
105
Analisi delle prestazioni del sottosistema propulsivo __________________________________________
Da sinistra, figg 3.4.2 - 5: esempi di configurazioni meccaniche sconvenienti
La configurazione prismatica a base quadrata pone qualche difficoltà in più, anche nel migliore dei casi,
di figura 3.4.6. Infatti i momenti d’inerzia principali non sono più uguali tra loro, il che si ripercuote sulla
manovrabilità in direzione ortogonale alle facce adiacenti al lato più lungo. Non è possibile pensare ad
una configurazione che permetta di realizzare più spinta in una direzione senza perdere le
caratteristiche desiderate sopra; si può comunque fornire una spinta più elevata con i propulsori a
disposizione, aumentando i livelli di tensione agli elettrodi estrattori.
Figg 3.4.6: configurazione virtuosa nel caso prismatico
La configurazione delle figure 3.4.1, 6 sembra essere, almeno con valutazioni a priori, la più utile,
semplice ed affidabile, e la si adotta nel modello a prisma di cui una power tile laterale è rappresentata
nella seguente figura 3.4.7.
106
_______________________________________________________Le scelta dell’architettura meccanica
Fig 3.4.7: power tile laterale della configurazione prismatica di AraMiS
Il possibile alloggiamento della coppia di propulsori potrebbe avvenire all’interno dell’area delimitata
dalla linea azzurra, che separa i collegamenti strutturali dalle celle solari. Spostando la fila di celle solari
in basso si potrebbe realizzare la configurazione ideale. Nel modello di cui si è riportato il codice si
modificano solo il braccio delle forze, l = 150 mm, la coppia, che viene raddoppiata, ed il momento
d’inerzia, che vale J = (0.332+0.1652)m/12 kgm2 per un satellite di massa m in kg. I grafici che ne risultano
sono riportati nelle figure 3.4.8, 9. I cambiamenti di prestazioni sono lievemente peggiorativi, ma di
entità talmente ridotta che le performance nell’altra direzione di rotazione sono da considerare
assimilabili al caso cubico precedente.
Da sinistra, figg. 3.4.8, 9: prestazioni della configurazione prismatica
107
108
________________________________________________________________ La Power Processing Unit
Capitolo 4
4 Analisi e programmazione della Power
Processing Unit
4.1 La Power Processing Unit
Fig 4.1.1: schema di collegamento del sottosistema propulsivo
Una componente fondamentale dei sottosistemi propulsivi di tipo electrospray è la cosiddetta PPU,
Power Processing Unit. Dal punto di vista del contributo in massa è una delle parti più importanti, e il
suo rendimento, essendo tra i più bassi dell’unità propulsiva, incide tipicamente in modo negativo
sull’efficienza globale. Nondimeno, il suo ruolo nella generazione della spinta è fondamentale, in quanto
provvede a tre compiti di vitale importanza: regolazione, controllo e commutazione, come si era
anticipato nella sezione introduttiva. La regolazione (regulation) consente di variare il potenziale a cui si
trovano gli emettitori e l’elettrodo estrattore, modulando le prestazioni (essenzialmente impulso
specifico e portata espulsa, e quindi spinta) e garantendo flessibilità prestazionale; la commutazione
(switching) espleta la funzione di cambio di polarità delle tensioni appena citate, per evitare l’accumulo
di ioni sulle superfici degli emettitori, come si era discusso al paragrafo 2.4; è inoltre essenziale garantire
l’interruzione delle operazioni elencate in caso di malfunzionamento, tramite operazioni di controllo
continuo in parallelo (control). La figura 4.1.1 fornisce uno schema a livello macroscopico dell’intero
sottosistema. La PPU attinge alle riserve di energia del satellite (che non forniscono più di una decina di
volt), alimentate dalle celle solari, e si interfaccia con gli array di propulsori tramite un trasformatore in
109
Analisi e programmazione della Power Processing Unit ________________________________________
corrente continua. Dal momento che in questo componente si realizzano le tensioni più elevate, la
funzione di controllo si focalizza su tale parte del sottosistema.
Si propone in questo capitolo lo sviluppo del software, scritto in linguaggio C, che governa un semplice
prototipo di PPU per iEPS, dotato di microcontrollore. In termini di efficienza e peso, lo schema proposto
sicuramente non rappresenta una soluzione ottimale, tuttavia non è escluso che possa essere migliorata
in una successiva fase di progetto. Si esamina in primo luogo tale configurazione, con l’aiuto dello
schema elettrico completo (al fondo del capitolo) e del diagramma a blocchi di figura 4.1.2, dove ogni
rettangolo rappresenta una componente del sottosistema, e le linee continue i relativi collegamenti
elettrici. Per convenzione, i segnali in input si rappresentano come collegati a sinistra di ogni blocco, gli
output a destra, l’alimentazione è connessa dall’alto e le tensioni di riferimento, come la massa, vanno
verso il basso. Le linee nere indicano il transito di segnali elettrici di potenza, necessari ad alimentare le
componenti principali, quelle rosse segnali digitali o che implementano una delle tre funzionalità sopra
elencate in modo diretto.
Fig 4.1.2: diagramma a blocchi della PPU per iEPS
L’unità principale, dove vengono elaborati i segnali di diagnostica, eseguito il software sviluppato ed
emessi gli output verso le altre componenti, è un microcontrollore del tipo PIC16F676. Quest’ultimo
dispone di 13 pin, dei quali solo una parte è utilizzata come porte per segnali digitali, di colore rosso
nello schema a blocchi. La funzione di switching si realizza con due coppie di relais che indirizzano le
tensioni di accelerazione verso il propulsore, e che possono ricevere in ingresso tensioni di migliaia di
volt, positive o negative. Queste due componenti sono alimentate dagli accumulatori del satellite (DC
110
________________________________________________________________ La Power Processing Unit
IN) attraverso un trasformatore in corrente continua (DC/DC) che fornisce in uscita 5 V (Vcc(5V)). La
tensione di -15 V è l’unico segnale non commutabile indirizzato al propulsore, in particolare all’elettrodo
estrattore, tramite il connettore PPU OUT. La tensione in ingresso, Vcc IN, proviene dagli accumulatori
del satellite e viene elaborata da un trasformatore invertente (INVERTING DC/DC, nella tavola 1). La
modulazione della spinta (regulation) è gestita dalle tre unità più in alto dello schema a blocchi. Una
pseudo-onda quadra, generata dal microcontrollore, viene passata attraverso un filtro passa-basso,
alimentato col segnale Vcc(5V); il risultato è una tensione, pressoché costante, che permette una
rudimentale modulazione del propulsore in quanto è tanto più alta quanti più segnali alti (1 logico) vi
sono nell’onda quadra. Tale livello di tensione viene amplificato in due stadi, il primo dei quali è
alimentato con la tensione in ingresso alla PPU (Vcc IN), ed il secondo rappresenta la fase ad alta
tensione vera e propria, gestita da un componente del tipo FS40. Stando alla tavola 4, il segnale
amplificato potrebbe anche provenire dall’esterno, tuttavia nell’analisi che segue tale possibilità non è
presa in considerazione. Il risultato dell’amplificazione a due stadi va poi ad alimentare i propulsori
tramite i relais. Un’altra funzionalità del microcontrollore trascurata è la possibilità di comandarlo in
remoto con un segnale infrarosso (IR).
4.2 Il microcontrollore
Prima di procedere alla descrizione dei meccanismi di regolazione, è necessario descrivere in breve la
struttura interna del microcontrollore, con l’aiuto dello schema a blocchi della figura 4.2.1. In figura
4.2.2 è invece mostrato il diagramma dei pin del PIC16F676.
A sinistra, fig 4.2.1: schema della composizione di un
microcontrollore, e a destra, fig 4.2.2: diagramma dei pin del
PIC16F676
Tipicamente, ogni microcontrollore è dotato di uno o più clock, un orologio interno (ma può anche
essere fornito dall’esterno), dotato di una propria frequenza, che determina la frequenza alla quale
viene ripetuto ogni ciclo di istruzioni, nel presente caso contenute all’interno di un ciclo while infinito. Il
PIC16F676 dispone di due timer chiamati Timer0 e Timer1, con caratteristiche diverse. Il segnale di clock
passa attraverso un divisore, che rappresenta un rallentamento dovuto alle operazioni del ciclo while, e
ne riduce la frequenza di un fattore pari all’inverso del suo valore caratteristico, non modificabile. A
valle è collegato un contatore, un registro fatto di alcuni bit di memoria in cui è memorizzato un numero
che viene incrementato di un’unità ad ogni segnale di clock. Quando raggiunge il suo valore massimo,
l’interrupt posto all’estremo destro dello schema del clock interrompe il conteggio facendolo ripartire
111
Analisi e programmazione della Power Processing Unit ________________________________________
da 0. Le due parti sottostanti formano il gruppo DIO, Digital Input Output. Le porte digitali sono otto,
numerate da 0 a 7 e fanno riferimento alla sezione Port; ciascuna è collegata ad un bit del registro Tris
(leggibile e scrivibile), che permette di stabilire se la corrispondente porta è destinata a ricevere input od
inviare output. Per default ciascuna porta è di input, cioè il relativo valore del bit di Tris è 1. Tale
configurazione è effettuata all’inizio del codice, una volta per tutte, nel caso in questione; in questa
parte sono anche dichiarati i valori dei bit di configurazione del Timer0. Esistono infatti registri, che
possono essere scritti o letti, i quali consentono di variare le prestazioni del clock in funzione delle
possibili esigenze, ad esempio gestire l’interrupt citato sopra.
Il Timer0 è l’unico utilizzato dalla PPU, si procede perciò ad esaminarlo. L’oscillatore interno ha una
frequenza di 4 MHz, ed il divisore divide per 4, cioè il clock ha una frequenza effettiva di 1 MHz; è inoltre
possibile dividere ulteriormente la frequenza con un prescaler, opportunamente impostato. Il conteggio
avviene sul registro TMR0, ad 8 bit, ed in genere si indica in base esadecimale, separando i primi 4 bit
dagli ultimi, perciò i valori possibili variano tra 00h ed FFh. I registri di controllo sono due, OPTION_REG
ed INTCON, i cui bit e le relative funzioni si riportano al fondo del capitolo, dalle relative pagine del
datasheet.
Nel caso di OPTION_REG i bit utilizzati nel presente caso sono: TOCS, settato a 0 poiché si sfrutta
l’oscillatore interno e PSA, fissato ad 1, poiché il prescaler utilizzato è interno. Questo è regolato dai bit
PS2:PS0. Non interessano, ad esempio, i bit TOSE ed INTEDG poiché fanno riferimento a risorse esterne,
che comunicano tramite i pin della macchina.
Per INTCON invece, bit che riguardano le risorse interne sono: GIE e TOIE, che una volta impostati ad 1
permettono all’interrupt, sopra discusso, di verificarsi, e TOIF, che indica, se alto, che l’overflow del
registro TMR0 è avvenuto (deve poi essere annullato nel codice).
Uno schema più dettagliato del Timer0, che tiene conto dei vari bit di configurazione, è riportato in
figura 4.2.3.
Fig 4.2.3: schema del clock Timer0
Il Timer1, con più funzionalità, è a 16 bit, perciò dispone di due registri ad otto bit: uno per il most
significant byte, TMR1H, e l’altro per il least significant byte, TMR1L; con le convenzioni menzionate
prima assumono valori da 0000h a FFFFh, dove ciascun numero esadecimale rappresenta quattro bit di
uno dei due registri. I bit di configurazione sono elencati nella tabella seguente, la descrizione
dettagliata del registro di controllo principale T1CON si trova al fondo del capitolo.
112
_____________________________________________________________________ Il microcontrollore
Il registro INTCON è condiviso con Timer0, al contrario di PIR e PIE. Il primo contiene il bit di flag
dell’interrupt, che vale 1 se si è verificato un overflow (viene annullato poi nel codice) e 0 altrimenti; il
secondo il bit di enable dell’interrupt (1 per abilitare). Il registro T1CON ha pochi bit di interesse in
questo caso: TMR1ON abilita il Timer1, se portato a 1; TMR1CS, se resettato, permette di utilizzare il
clock interno; infine i bit T1CKPS1, T1CKPS0 permettono di impostare il prescaler. Uno schema dei bit di
configurazione è riportato in figura 4.2.4.
Fig 4.2.4: schema del clock Timer1
113
Analisi e programmazione della Power Processing Unit ________________________________________
4.3 Regolazione, commutazione e controllo
Esaminata la struttura della PPU in uso e del microcontrollore, si mostra ora come sono svolti i tre
compiti fondamentali chiesti alla Power Processing Unit.
1) Regolazione
Come anticipato prima, è possibile ottenere una ristretta modulazione delle alte tensioni in uscita
con una procedura chiamata Pulse Width Modulation, PWM. Il segnale digitale PWM_IN proviene
dal microcontrollore, ed ha un periodo di 4 ms. Con una frequenza di clock di 1 MHz, in teoria si
sarebbe in grado di impostare PWM_IN ogni microsecondo, perciò sarebbero realizzabili 4000
divisioni del periodo scelto, tuttavia si è ritenuto sufficiente operarne solo quattro. Il livello di
tensione in uscita PWM_ANALOG è proporzionale al numero di segnali digitali alti in ingresso: se
non ce ne sono, la tensione in uscita sarà nulla, per uno solo si avrà il 25% della tensione massima, e
così via.
Ciò che si vuole ottenere nel software è un computo del tempo, che ogni millisecondo possa avviare
una subroutine che assegni, dato un input esterno del tipo PWM_IN = {0,1,2,3,4}, dei livelli di
tensione corrispondenti, riferiti alla tensione massima ottenibile, PWM_ANALOG = {0%, 25%, 50%,
75%, 100%}.
2) Commutazione
Si sa che l’insorgere di reazioni elettrochimiche dannose a carico degli emettitori può essere evitato
alternando le polarità delle tensioni in uscita alla frequenza di 1 Hz. Basterà quindi, nella scansione
temporale del programma principale, inserire una subroutine che realizzi lo scambio tra i canali di
trasmissione dei relais, tramite i segnali RLY_A e RLY_B, i quali ne controllano una coppia ciascuno, e
si intendono chiusi per RLY_A/B = 1.
Per evitare cortocircuiti, è necessario impedire che i due segnali RLY_A e RLY_B chiudano
contemporaneamente i circuiti dei quattro relais, cioè che non valgano mai contemporaneamente 1.
Per tale motivo, durante una commutazione, è importante prima aprire tutti e due i circuiti, e poi
invertire la tensione d’uscita, poiché le inerzie meccaniche potrebbero realizzare la sovrapposizione
descritta. È buona norma anche spegnere il FS40 (il componente “HV module” di figura 4.1.1)
durante tale operazione, essendo un componente che elabora alte tensioni, quindi potenzialmente
pericoloso.
3) Controllo
Si analizza ora lo schema a blocchi del componente FS40, in figura 4.3.1, per comprendere il
comportamento dei segnali in ingresso ed uscita.
114
____________________________________________________ Regolazione, commutazione e controllo
Fig 4.3.1: diagramma a blocchi del componente FS40
La tensione in ingresso LV viene amplificata (HV), e l’operazione può essere interrotta ad ogni
istante dal microcontrollore, portando ad 1 la variabile FS40_SHDN. Nel codice questo accade
quando, dalla sezione digitale (TTL) la diagnostica interna rileva un malfunzionamento e porta ad 1 il
bit ALRM. Esso può essere resettato con un power cycling del segnale ALRM_RST, che è una potenza
logica e necessita di almeno 25 mA di corrente, che comunque sono già forniti dal PIC: non c’è
dunque bisogno di installare un amplificatore a monte dell’FS40. Il seguente diagramma temporale
di figura 4.3.2 esemplifica il comportamento appena descritto, e tiene conto dei ritardi causati dalle
elaborazioni, indicando a lato da che componente sono causate. Si è assunto, in prima
approssimazione, che ALRM_RST agisca istantaneamente sulla variabile ALRM, poiché entrambi
appartengono alla stessa unità.
Fig 4.3.2: diagramma temporale delle variabili di controllo dell’FS40
4.4 Il codice per il microcontrollore
115
Analisi e programmazione della Power Processing Unit ________________________________________
4.4 Il codice per il microcontrollore
Il codice deve tenere conto di tutte le necessità sopra elencate; per verificare il suo corretto
funzionamento in maniera immediata si è utilizzata una development board modello Explorer 16 (di cui
si riporta lo schema generale dal datasheet a fondo capitolo), la quale sfortunatamente non è
predisposta ad ospitare un PIC16F676, bensì un PIC24FJ128GA010. Ciò non rappresenta un problema,
poiché il microcontrollore compatibile con la board gode di molte più funzionalità di quello per la PPU e
dispone di molti pin in più (100). Tale configurazione dell’hardware non comporta sostanziali modifiche
rispetto ai piani iniziali: il timer più semplice da utilizzare è un modello Timer1, e non Timer0,
l’oscillatore interno utilizzato ha una frequenza di 8MHz, che col divisore si riduce a 2MHz; non c’è
comunque bisogno di amplificare il segnale ALRM_RST per consentire l’elaborazione da parte dell’FS40.
La visualizzazione delle variabili digitali è effettuata con una matrice di LED (numerati da 0 a 7) collegati
alla PORTA del PIC, la cui associazione ai segnali è mostrata nella seguente tabella.
Per svolgere i compiti di regolazione, commutazione e controllo si utilizzano rispettivamente le
subroutine PWM_mod, RLY_switch ed FS40. Per esemplificare il funzionamento della modulazione, la
variabile PWM_IN viene incrementata ogni 10 secondi; la struttura del codice presenta perciò come:
// chiamata delle librerie
//dichiarazione ed inizializzazione delle variabili globali
int main
{
//configurazione dei bit di registro
msec=0, sec=0, min=0, hr=0, msec_old=0, PWM=0, ALRM=0, ALARM_RST=1,
count=1, MEM=0, … // dichiarazione ed inizializzazione delle variabili
del main
while(1)
{
if (sec-sec_old >= 10)
{
sec_old = sec;
PWM++;
}
msec++;
PWM_mod ();
FS40 ();
if (msec >= 1000)
{
116
___________________________________________________________ Il codice per il microcontrollore
sec++;
RLY_switch ();
msec=0;
if (sec>=60)
{
min++;
sec=0;
if (min >= 60)
{
hr++;
min=0;
if (hr >= 24)
hr=0;
}
}
}
}
}
//funzioni
//commutazione
void RLY_Switch (void)
{
FS40_SHDN=1;
M1=RLY_A;
if (RLY_A == 1)
RLY_A=0;
M2=RLY_B;
if (RLY_B == 1)
RLY_B=0;
RLY_A=1-M1;
RLY_B=1-M2;
FS40_SHDN=0;
}
//regolazione
void PWM_mod (void)
{
if (PWM>4)
PWM=0;
if (count <= PWM)
PWM_IN=1;
else PWM_IN=0;
count++;
if (count > 4)
count=1;
}
//controllo
void FS40 (void)
117
Analisi e programmazione della Power Processing Unit ________________________________________
{
if (MEM == 1)
ALRM=0;
if (ALRM == 1)
{
FS40_SHDN=1;
ALARM_RST=0;
MEM=1;
}
else
FS40_SHDN=0;
ALARM_RST=1;
}
Sfortunatamente, non è stato possibile inviare un segnale di malfunzionamento dell’FS40 (MEM = 1)
dall’esterno, benché la board Explorer 16 lo consentisse: il valore imposto era immagazzinato nel
registro LAT e non in PORT. Per consentire anche il controllo della temporizzazione si è scelto di
modificare un codice scritto per visualizzare un timer sullo schermo LCD dell’Explorer 16. Il codice
completo che ne è risultato e il codice driver per l’ LCD sono presentati nel seguito.
/**********************************************************************
* REVISION HISTORY:
*~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
* Author
Date
Comments on this revision
*~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
* Jyoti Shrinivas 04/04/09
First version of source file - v1
* Harsha.J.M
Modifications with library - version v1.1
*~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
*
* ADDITIONAL NOTES:
* Code uses the PERIPHERAL LIBRARY support available with MPLAB C30 Compiler
* Code Tested on:
* EXPLORER 16 demo board with PIC24FJ256GB110 controller
* The Processor starts with the External Crystal (8 Mhz).
*
* Program makes use of LCD panel available on EXPLORER 16 board to display
time
**********************************************************************/
#define USE_AND_OR
#include "timer_clock.h"
//#if defined(__PIC24FJ256GB110__)
///*************** COFIGURATION **************************************
//*
Watchdog Timer Disabled
//*
Two Speed Start-up enabled
//*
Oscillator Selection: HS oscillator ( 8MHz crystal on EXPLORER 16 Board
)
//*
Clock switching and clock monitor both enabled
//********************************************************************/
//_CONFIG1(FWDTEN_OFF & ICS_PGx2)
118
___________________________________________________________ Il codice per il microcontrollore
//_CONFIG2(IESO_ON & FNOSC_PRI & FCKSM_CSECME & POSCMOD_HS & PLLDIV_DIV2 &
IOL1WAY_OFF)
//#endif
unsigned int msec, sec, min, hr,MSD, MdD, LSD,DataAvailable=0;
int PWM=0,M1,M2,count=1,i,MEM=0;
//******************** interrupt service routine for Timer23
******************************
void __attribute__ ((interrupt,no_auto_psv)) _T2Interrupt (void)
{
T2_Clear_Intr_Status_Bit;
//clear the interrupt
flag
msec++;
PWM_mod ();
FS40 ();
DataAvailable=1;
//flag the data
availability
}
int main(void)
{
int msec_old=0, sec_old=0;
hr=0;
min=0;
sec=0;
msec=0;
LCDInit();
//initialize LCD
//LED settings
ODCA=0x00;
TRISA=0x00;
LATAbits.LATA6=1;
LATAbits.LATA2=1;
LATAbits.LATA7=0;
//***************** Configure timer with interrupt enabled & interrupt
priority 1 ****************
ConfigIntTimer2(T2_INT_ON|T2_INT_PRIOR_1);
OpenTimer2(T2_ON,2000); // 1ms
while(1)
{
if(DataAvailable)
{
DataAvailable=0;
Timer();
}
119
Analisi e programmazione della Power Processing Unit ________________________________________
if (sec-sec_old >= 10)
{
sec_old = sec;
PWM++;
}
if (msec-msec_old > 10)
{
msec_old = msec;
DisplayTime(hr,min,sec,(msec/10));
}
}
CloseTimer2();
}
void DisplayTime(char hours, char minutes, char seconds,char milli_secs )
{
LCDL2Home();
Bin2BCD(hours);
LCDPut(MdD+0x30);
LCDPut(LSD+0x30);
LCDPut(':');
Bin2BCD(minutes);
LCDPut(MdD+0x30);
LCDPut(LSD+0x30);
LCDPut(':');
Bin2BCD(seconds);
LCDPut(MdD+0x30);
LCDPut(LSD+0x30);
LCDPut(':');
Bin2BCD(milli_secs);
LCDPut(MdD+0x30);
LCDPut(LSD+0x30);
}
void DisplayDate(char day, char month, char year)
{
LCDL1Home();
Bin2BCD(day);
LCDPut(MdD+0x30);
LCDPut(LSD+0x30);
LCDPut('/');
Bin2BCD(month);
LCDPut(MdD+0x30);
120
___________________________________________________________ Il codice per il microcontrollore
LCDPut(LSD+0x30);
LCDPut('/');
Bin2BCD(year);
LCDPut(MdD+0x30);
LCDPut(LSD+0x30);
//LCDPut(':');
}
void Bin2BCD(char temp)
{
LSD = temp;
for (MSD = 0 ;
repeated subtraction
for (MdD = 0 ;
repeated subtraction
}
// Reciev the byte in RAM(temp)
// Store the byte in LSD
LSD >= 100 ; LSD>=100?(LSD -= 100):LSD, MSD++ ); // Do
with 100 untill LSD > 100, count interation(MSD)
LSD >= 10 ; LSD>=10?(LSD -= 10):LSD, MdD++); // Do
with 10 untill LSD > 10, count interation(MsD)
void Timer (void)
{
if(msec>=1000)
{
sec++;
RLY_Switch();
msec=0;
if(sec>=60)
{
min++;
sec=0;
if(min>=60)
{
hr++;
min=0;
if(hr>=24)
{
hr=0;
}
}
}
}
}
//switching
void RLY_Switch (void)
{
LATAbits.LATA5=1;
M1=LATAbits.LATA3;
if (LATAbits.LATA3 == 1)
LATAbits.LATA3=0;
M2=LATAbits.LATA2;
if (LATAbits.LATA2 == 1)
121
Analisi e programmazione della Power Processing Unit ________________________________________
LATAbits.LATA2=0;
LATAbits.LATA3=1-M1;
LATAbits.LATA2=1-M2;
LATAbits.LATA5=0;
}
//regulation
void PWM_mod (void)
{
if (PWM>4)
PWM=0;
if (count <= PWM)
LATAbits.LATA0=1;
else LATAbits.LATA0=0;
count++;
if (count > 4)
count=1;
}
//control
void FS40 (void)
{
if (MEM == 1)
LATAbits.LATA7=0;
if (LATAbits.LATA7 == 1)
{
LATAbits.LATA5=1;
LATAbits.LATA6=0;
MEM=1;
}
else
LATAbits.LATA5=0;
LATAbits.LATA6=1;
}
/****************************************************************************
*
*
* LCD Driver for PIC24.
*
*****************************************************************************
* FileName:
lcd.c
* Dependencies:
* Processor:
* Compiler:
* Linker:
* Company:
Microchip Technology Incorporated
* A simple LCD driver for LCDs interface through the PMP
122
___________________________________________________________ Il codice per il microcontrollore
*~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
*/
#include "timer_clock.h"
unsigned int _uLCDloops;
void pmp_Init(void)
{
unsigned int mode,control,port,addrs,interrupt;
control = BIT_PMP_ON | BIT_RD_WR_ON | BIT_RD_WR_HI ;
mode = BIT_MODE_MASTER_1 | BIT_WAITB_4_TCY | BIT_WAITM_15_TCY |
BIT_WAITE_4_TCY ;
port = BIT_P0;
addrs = 0x0000;
interrupt = 0x0000;
PMPClose();
PMPOpen(control,mode,port,addrs,interrupt);
}
void LCDInit(void)
{
pmp_Init();
_uLCDloops = LCD_STARTUP;
Wait(_uLCDloops);
_uLCDloops = LCD_F_INSTR;
PMDIN1 = 0b00111000;
Wait(_uLCDloops);
// Set the default function
_uLCDloops = LCD_STARTUP;
Wait(_uLCDloops);
_uLCDloops = LCD_F_INSTR;
PMDIN1 = 0b00001100;
Wait(_uLCDloops);
_uLCDloops = LCD_STARTUP;
Wait(_uLCDloops);
_uLCDloops = LCD_S_INSTR;
PMDIN1 = 0b00000001;
Wait(_uLCDloops);
// Clear the display
_uLCDloops = LCD_STARTUP;
Wait(_uLCDloops);
123
Analisi e programmazione della Power Processing Unit ________________________________________
_uLCDloops = LCD_S_INSTR;
PMDIN1 = 0b00000110;
// Set the entry mode
Wait(_uLCDloops);
LCDClear();
LCDHome();
}
void LCDHome(void)
{
_uLCDloops = LCD_S_INSTR;
//
PMADDR = 0x0000;
PMPSetAddress(0x0000);
PMDIN1 = 0b00000010;
while(_uLCDloops)
_uLCDloops--;
}
void LCDL1Home(void)
{
_uLCDloops = LCD_S_INSTR;
//
PMADDR = 0x0000;
PMPSetAddress(0x0000);
PMDIN1 = 0b10000000;
while(_uLCDloops)
_uLCDloops--;
}
void LCDL2Home(void)
{
_uLCDloops = LCD_S_INSTR;
//PMADDR = 0x0000;
PMPSetAddress(0x0000);
PMDIN1 = 0b11000000;
while(_uLCDloops)
_uLCDloops--;
}
void LCDClear(void)
{
_uLCDloops = LCD_S_INSTR;
//PMADDR = 0x0000;
PMPSetAddress(0x0000);
PMDIN1 = 0b00000001;
while(_uLCDloops)
_uLCDloops--;
}
void LCDPut(char A)
124
___________________________________________________________ Il codice per il microcontrollore
{
//
_uLCDloops = LCD_F_INSTR;
PMADDR = 0x0001;
PMPSetAddress(0x0001);
PMDIN1 = A;
while(_uLCDloops)
_uLCDloops--;
Nop();
Nop();
Nop();
Nop();
}
void Wait(unsigned int B)
{
while(B)
B--;
}
void DisplayMSG(unsigned char *array)
{
unsigned char i=0,line=1;
LCDL1Home();
while (*array)
// Continue display characters from STRING
untill NULL character appears.
{
LCDPut(*array++); // Display selected character from the STRING.
if (i>19 && line==1)
{
LCDL2Home();
line++;
}
i++;
}
}
A conclusione del capitolo si riportano lo schema elettrico completo della PPU e i vari estratti dai
datasheet dei componenti sopra citati
125
Analisi e programmazione della Power Processing Unit ________________________________________
126
___________________________________________________________ Il codice per il microcontrollore
127
Analisi e programmazione della Power Processing Unit ________________________________________
128
___________________________________________________________ Il codice per il microcontrollore
129
Analisi e programmazione della Power Processing Unit ________________________________________
130
___________________________________________________________ Il codice per il microcontrollore
131
Analisi e programmazione della Power Processing Unit ________________________________________
132
___________________________________________________________ Il codice per il microcontrollore
133
Analisi e programmazione della Power Processing Unit ________________________________________
134
___________________________________________________________________________ Bibliografia
Bibliografia
[1] Marcel J. Sidi, Spaceraft Dinamics and Control, Cambridge University Press, 2006
[2] Giulio Avanzini, Spacecraft Dynamics and Control (dispense del corso di dinamica e controllo
d’assetto), Politecnico di Torino, 2009
[3] J. Fernandez de la Mora, The Fluid Dynamics of Taylor Cones, The Annual Review of Fluid Mechanics,
2007. 39:217–43
[4] Matthew S. Alexander, John Stark, Katharine L. Smith, Bob Stevens, Barry Kent, Electrospray
Performance of Microfabricated Colloid Thruster Arrays, Journal of Propulsion and Power, Vol. 22,
No. 3, May – June 2006
[5] John W. Daily, Molecular Dynamics Simulation of Ion Emission from Nanodroplets of Ionic Liquids,
Journal of Propulsion and Power, Vol. 24, No. 5, September – October 2008
[6] Brian R. Donius, Joshua L. Rovey, Ionic Liquid Dual – Mode Spacecraft Propulsion Assessment, Journal
of Spacecraft and Rockets, Vol.48, No. 1, January – February 2011
[7] James A. Nabity, Georgia Mason, Jeffrey R. Engel, John W. Daily, Randy S. Lagumbay, David Kassoy,
Studies of MEMS Colloid Thrusters, AIAA 2006 – 5007
[8] I. Romero – Sanz, I. Aguirre de Carcer, J. Fernandez de la Mora, Ionic Propulsion Based on Heated
Taylor Cones of Ionic Liquids, Journal of Propulsion and Power, Vol. 21, No.2, March – April 2005
[9] Brian R. Donius, Joshua L. Rovey, Analysis and Prediction of Dual – Mode Chemical and Electric Ionic
Liquid Propulsion Performance, AIAA 2010 – 1328
[10] Theodore N. Edelbaum, Propulsion Requirements for Controllable Satellites, ARS Journal, August
1961
[11] Datasheet del PIC 16F676.
URL: http://ww1.microchip.com/downloads/en/DeviceDoc/40039F.pdf
[12] Datasheet del PIC 24FJ128GA010.
URL: http://ww1.microchip.com/downloads/en/DeviceDoc/39747e.pdf
[13] Manuale di riferimento dei PIC.
URL: http://ww1.microchip.com/downloads/en/DeviceDoc/33023a.pdf
135
Bibliografia___________________________________________________________________________
[14] Datasheet del FS40.
URL: http://www.emcohighvoltage.com/pdfs/fsseries.pdf
[15] Guida dell’utente dell’Explorer 16.
URL:
http://ww1.microchip.com/downloads/en/DeviceDoc/Explorer%2016%20User%20Guide%205158
9a.pdf
136