UNIVERSITA’ DEGLI STUDI DI BARI
FACOLTA’ DI SCIENZE MATEMATICHE FISICHE E NATURALI
CORSO DI LAUREA IN FISICA
___________________________________________________
TESI DI LAUREA
DINAMICA E CINETICA DI UN PLASMA RF
TRA PIATTI PARALLELI IN OSSIGENO
Relatori:
Laureando:
Prof. Mario Capitelli
Daniele Marinazzo
Prof. Savino Longo
___________________________________________________
ANNO ACCADEMICO 2000 - 01
INDICE
INTRODUZIONE .................................................................................. 1
CAPITOLO 1
CARATTERISTICHE DI UN PLASMA RF......................................... 5
1.1
Il plasma RF ..............................................................................................5
1.2 Lunghezza di Debye e moti collettivi..............................................................6
1.3
Sheath e bulk .............................................................................................9
1.4 Modello circuitale dello sheath......................................................................10
1.5 Diffusione ambipolare ...................................................................................12
1.6 Riscaldamento elettronico .............................................................................14
CAPITOLO 2
CARATTERISTICHE MATEMATICHE E FISICHE DEL
MODELLO ...........................................................................................17
2.1 Modello numerico per la simulazione: PIC/MCC.........................................17
2.1.1 PIC ..........................................................................................................17
2.1.2 MCC .......................................................................................................20
2.2 Modifica del ciclo temporale.........................................................................24
2.3 Accoppiamento del modello con la cinetica..................................................26
2.4 Dinamica delle collisioni ...............................................................................29
CAPITOLO 3
REAZIONI ED ENERGIA...................................................................33
3.1 Specie neutre presenti nel modello................................................................33
3.2 Sezioni d’urto e costanti di velocità ..............................................................34
3.3 Reazioni da impatto elettronico.....................................................................36
3.3.1
Eccitazioni verso stati metastabili ...................................................36
3.3.2
Diseccitazioni ..................................................................................37
3.3.3.
Dissociative attachments O2 ............................................................40
3.3.4
Ionizzazioni .....................................................................................41
3.3.5
Eccitazione dissociativa...................................................................42
3.3.6
Perdite di 4.5, 6.0, 8.4 e 9.97 eV .....................................................44
3.3.7
Momentum transfer .........................................................................45
3.3.8
Dissociative attachment O3..............................................................46
3.3.9
Ricombinazioni...............................................................................46
3.3.10 Collisioni tra specie pesanti.............................................................47
3.3.11
Scambio di carica............................................................................48
3.3.12
Momentum transfer ........................................................................49
3.3.13 Emissione secondaria ...........................................................................50
3.4 Verso l’equazione del calore .........................................................................50
3.5 L’equazione del calore...................................................................................53
3.5.1 Il termine sorgente ..................................................................................53
3.5.2 Conduttività ............................................................................................56
CAPITOLO 4
DISCRETIZZAZIONE ED IMPLEMENTAZIONE
DELL’EQUAZIONE DEL CALORE..................................................57
4.1 Forma generale dell’equazione da discretizzare............................................57
4.2 Regole di base................................................................................................59
4.3 Nonlinearità ...................................................................................................65
4.4 Condizioni al contorno ..................................................................................67
4.5 Risoluzione delle equazioni algebriche .........................................................71
4.6 Sovrarilassamento e sottorilassamento ..........................................................75
4.7 Forma finale dell’ equazione discretizzata ....................................................77
CAPITOLO 5
RISULTATI..........................................................................................79
5.1 Temperatura...................................................................................................79
5.2 Potenziale.......................................................................................................80
5.3 Densità ...........................................................................................................82
5.4 Energia media ................................................................................................86
5.5 Densità, energia e velocità in un ciclo RF .....................................................93
5.6 Funzione di distribuzione dell’energia degli elettroni (EEDF) .....................95
5.7 Funzione di distribuzione di energia degli ioni (IEDF).................................97
5.8 Potenza depositata e reazioni.......................................................................106
5.9 Ionizzazione.................................................................................................114
CONCLUSIONI .................................................................................115
APPENDICE
LIVELLI ENERGETICI DELLA MOLECOLA DI OSSIGENO.....117
BIBLIOGRAFIA ................................................................................119
INTRODUZIONE
I plasmi da scarica chimicamente reattivi sono ampiamente usati
per modificare le proprietà superficiali dei materiali . Processi
superficiali basati sul plasma sono indispensabili nel costruire circuiti
integrati su ampia scala usati dall’ industria elettronica . Tali processi
sono anche di vitale importanza per l’industria aerospaziale,
automobilistica, biomedica, per le acciaierie e per lo smaltimento di
rifiuti tossici .
Col plasma si possono fabbricare materiali e strutture superficiali
altrimenti non ottenibili e le proprietà superficiali dei materiali possono
essere modificati in maniera unica. Ad esempio si possono incidere
solchi larghi 0.2 µm e profondi 4 µm in pellicole o substrati di silicio
per isolare un dispositivo o costruire un condensatore per
l’immagazzinamento di carica in un circuito integrato (il diametro di un
capello è tra i 50 e i 100 µm). Tramite il plasma sono anche stati
prodotti materiali quali i film di diamante e il silicio amorfo .
Le scariche in ossigeno sono usate per depositare tramite
sputtering alluminio, tungsteno o pellicole superconduttrici ad alta
temperatura; per crescere film di SiO2 sul silicio; per rimuovere
selettivamente film di silicio; per rimuovere pellicole fotoresistenti o
pellicole di polimeri .
Per la microcostruzione di un circuito integrato, circa un terzo
delle decine di migliaia di passi di fabbricazione sono basati
sull’utilizzo di plasmi .
Inoltre, una caratteristica delle scariche a bassa pressione che
sono trattate in questo lavoro è che il plasma, e così anche il sistema
plasma-substrato , non è in equilibrio termico, come sarà mostrato in
1
seguito. Ciò permette temperature del substrato relativamente basse,
pur mantenendo tassi adeguati di deposizione o di etching anche
laddove si devono trattare materiali termolabili quali i polimeri
organici. I plasmi di non equilibrio sono caratterizzati da una elevata
energia elettronica e da un’alta concentrazione di particelle cariche ed
eccitate.
L’ottimizzazione di tutti i processi che riguardano i plasmi di non
equilibrio richiede la soluzione di due problemi intrecciati: la
determinazione dei parametri interni (concentrazione di particelle
cariche ed eccitate e di prodotti di reazioni chimiche, e loro
distribuzioni di energia) dati i parametri esterni della scarica
(composizione del gas, pressione; frequenza, potenza ed intensità della
corrente si scarica, geometria del reattore), e il calcolo della cinetica
delle reazioni chimiche nel volume del plasma, sugli elettrodi e sulle
pareti.
Alla luce di ciò si evince l’utilità di un lavoro teorico che vada
fianco a fianco con quello sperimentale. Una simulazione infatti
permette il controllo rapido ed immediato, oltre che poco dispendioso,
di tutti i parametri di cui si è parlato in precedenza, ed è anche un
utilissimo mezzo per comprendere il comportamento delle particelle
all’ interno del plasma, consentendo anche un conteggio preciso di ogni
tipo di collisione.
Questo lavoro è rivolto alla simulazione di una scarica a
radiofrequenza in ossigeno puro, che è stata solo raramente considerata
come caso test per modelli fluidi e cinetici di plasmi di non equilibrio,
lasciando relativamente aperto il campo di ricerca.
Il metodo numerico per la simulazione prende il nome di
PIC/MCC (Particle In Cell with Monte Carlo Collisions). Nel modello
qui in esame è stata prestata particolare attenzione alla cinetica degli
2
elettroni e degli ioni. All’interno di questo modello si sono studiate
dettagliatamente tutte le reazioni che hanno avute per protagoniste le
specie chimiche da noi simulate, con particolare attenzione all’energia
assorbita o rilasciata nel plasma dopo ognuna di esse.
Parallelamente sono stati monitorati tutti i processi di semplice
collisione e le conseguenti variazioni di energia cinetica. Queste
energie sono state raccolte ed utilizzate come sorgente in una
equazione allo stato stazionario per la diffusione del calore, dando
origine ad un profilo di temperatura.
Questo tipo di studio non era finora mai stato condotto, e si vede
come il profilo di temperatura modifica l’energia e la densità delle
specie presenti nel nostro modello.
Nel primo capitolo della presente tesi si farà riferimento alle
caratteristiche generali di un plasma di non equilibrio.
Il secondo capitolo illustra il modello utilizzato per la
simulazione e descrive l’accoppiamento tra cinetica e modello
PIC/MCC.
Il terzo capitolo è una esposizione delle reazioni considerate,
delle rispettive sezioni d’urto e del loro apporto energetico. Inoltre
saranno gettate le basi per la costruzione dell’equazione di diffusione
del calore.
Il quarto capitolo descrive in dettaglio l’implementazione della
equazione della diffusione del calore.
Infine il quinto capitolo è dedicato alla discussione dei risultati.
Il codice PIC/MCC usato per la simulazione fa parte dell’ultima
generazione di modelli che sono stati sviluppati a partire dai primi anni
Novanta presso il Dipartimento di Chimica dell’ Università di Bari e il
Centro di Studi per la Chimica dei Plasmi del CNR. Si vedano in
3
proposito i lavori di M.Capitelli, S.Longo [1,2,3] e la tesi di Laurea in
Fisica di D.Iasillo[4].
Il lavoro sulla cinetica è stato svolto in collaborazione con
K.Hassouni e W.Morscheidt dell’ Università di Paris 13.
4
CAPITOLO 1
CARATTERISTICHE DI UN PLASMA RF
1.1
Il plasma RF
Un plasma generato tramite scarica a radiofrequenza è solo uno
dei numerosissimi plasmi esistenti in natura o che possono essere
prodotti in laboratorio, che spaziano su un range enorme di densità e di
temperatura. Esso viene prodotto in un reattore costituito da un cilindro
le cui basi sono gli elettrodi.
Questo tipo di plasma è caratterizzato da una temperatura
elettronica dell’ordine di qualche eV e da una densità di particelle
cariche n* tra 108 e 1013 cm-3. Per questo motivo un plasma di non
equilibrio è detto anche plasma freddo o a bassa pressione e la scarica
che lo produce è detta glow discharge, dal bagliore diffuso dovuto alla
radiazione emessa dalle specie che si diseccitano.
Un sistema siffatto è caratterizzato dalla molteplicità di
canali che variano in maniera diversa in diversi intervalli di energia e si
influenzano l’un l’altro. Questi processi comportano non equilibrio,
non linearità, non stazionarietà ed instabilità.
La densità di energia nel plasma è tale che in esso si
verificano continuamente processi chimici ed è quindi necessario, data
la dipendenza dall’energia di questi processi, tenere sempre controllo la
variazione di energia e tener conto dei contributi dovuti agli stati
eccitati delle particelle e dei prodotti di reazione.
Lo stato stazionario di nonequilibrio è sostenuto dal flusso
attraverso il sistema dell’energia presa dal campo elettrico esterno ed
*
Si fa l’ipotesi di quasineutralità per cui n rappresenta due quantità circa uguali, la densità
elettronica e quella ionica
5
usato in primo luogo per scaldare gli elettroni. Come risultato della
collisione con particelle pesanti, l’energia elettronica è usata per
eccitare i vari livelli, per la dissociazione delle molecole e la
ionizzazione delle molecole e degli atomi nei processi inelastici, ed è
trasferita ai gradi di libertà traslazionali nelle collisioni elastiche. Il
rilassamento delle energie rotazionali e vibrazionali porta al
trasferimento di questa energia ai gradi di libertà traslazionali delle
particelle pesanti e al riscaldamento del gas.
1.2 Lunghezza di Debye e moti collettivi
Le forze che agiscono su una particella carica possono essere
divise in due tipi: quelle dovute a cariche distanti, che danno un campo
lentamente variabile in prossimità della particella e contribuiscono così
al moto collettivo delle particelle; e quelle dovute a particelle vicine
che la fanno muovere in maniera non correlata rispetto ad esse. I moti
correlati sono governati da un tempo detto periodo di plasma, tp.
-
+ - + -+
-+-++
+-+-+
-+-++
+ - + -+
- + - ++
+-+-+-+-+-+
+-+-+-+-+-+
+-+-+-+-+-+
+
+
+
+
+
+
+-+-+-+
+-+-+-+
+-+-+-+
-
Fig. 1.1 Oscillazioni di plasma
Consideriamo una «fetta» di plasma, soggetta ad un campo
elettrico che separa leggermente le cariche e crea due strati sottili di
polarità opposta, ognuno di spessore x come indicato in figura 1.1. Un
6
foglio infinito uniformemente carico con densità di carica origina un
campo uniforme σ/2ε0 nelle sue vicinanze. Dato che la densità di carica
superficiale in ogni strato ha modulo nex, dove e è la carica elementare,
e le due distribuzioni si rinforzano a vicenda, il campo totale è nex/ε0.
Ogni elettrone, di massa m, è soggetto ad una forza –ne2x/ε0 e quindi
compie un moto armonico con frequenza angolare, detta frequenza di
plasma,
1
ne 2 2
ω P =
ε
m 0
(1.1)
corrispondente ad un periodo di plasma
1
ne 2 − 2
t P = 2π
mε 0
(1.2) .
La distanza entro la quale le interazioni non correlate tra
particelle sono considerate importanti è detta lunghezza di Debye, che
indicheremo con D. Se consideriamo una sfera di Debye, una sfera di
raggio D che circonda la particella, l’effetto della distribuzione di
carica oltre una distanza D è sostanzialmente ridotto dallo schermo
costituito dalle particelle circostanti.
Consideriamo infatti una carica di prova q circondata da
elettroni in equilibrio termico. Risolvendo l’equazione di Poisson si
può determinare il potenziale che agisce sulla particella [5] :
7
r
q
φ=
exp −
πε
4 0r
λD
(1.3)
con
λD =
ε 0 kT
e2n
(1.4)
è la lunghezza di Debye. E’ evidente che per r<<D il campo è
dovuto alla carica di prova, ma per r dell’ordine di D o maggiori il
campo è sostanzialmente ridotto (schermato) dagli elettroni.
Per distanze minori della lunghezza di Debye i campi
dovuti a particelle cariche individuali sono predominanti è il plasma si
comporta come un insieme di particelle non correlate. Su grandi
distanze il comportamento individuale è schermato dall’azione
collettiva di di molte particelle. Infatti, per tali distanze, si può avere
solo un comportamento collettivo, in cui le particelle si comportano in
maniera coerente, sotto forma di un’onda di plasma. La simulazione
tramite particle-in-cell ha senso in quest’ultima regione.
Infatti, il comportamento delle particelle nel regime a corto
raggio (individuale) è caratterizzato da effetti collisionali che si
differenziano da quelli che si incontrano nei gas per l’importanza
dell’interazione simultanea della particella di prova con tanti altri corpi.
Il problema è adesso quello di decidere quanto sono importanti i moti
indotti dalle interazioni locali rispetto ai moti collettivi dovuti alle
particelle più lontane. Un indicatore per questo problema è il rapporto
tra tc e tP dove tc è il tempo medio tra due collisioni in cui una
particella è deviata di un angolo maggiore di π/2 e tP è il periodo di
8
plasma. Si può dimostrare [6] che questo rapporto è dell’ ordine del
numero di particelle nella sfera di Debye, ND.
Per questo motivo, quando ND è >>1 si può portare avanti
la simulazione per un gran numero di periodi di plasma senza che siano
importanti gli effetti dovuti alle collisioni. In queste condizioni il
sistema può essere considerato non collisionale e il modello può essere
costruito sulla base di valori medi del campo in prossimità di ogni
particella.
Ovviamente il nostro è il modello di un plasma in queste
condizioni, detto plasma ideale.
1.3
Sheath e bulk
I plasmi, che sono quasineutri, sono collegati alle pareti del
reattore da strati sottili carichi positivamente, detti sheaths . Per capire
come mai, si noti in primo luogo che la velocità termica degli elettroni
(eTe/m)1/2 è almeno 100 volte maggiore della velocità termica ionica
(eTi/M)1/2 in quanto m/M<<1 e Te<<Ti.
Consideriamo un plasma di larghezza l con ne=ni inizialmente
confinato tra due pareti assorbenti a potenziale zero (fig.1.2). Dato che
la densità di carica netta =e(ni-ne) è zero, il potenziale elettrico e il
campo elettrico Ex sono nulli ovunque. Quindi gli elettroni veloci non
sono confinati e si perderanno rapidamente contro le pareti. Su una
scala di tempi molto piccola alcuni elettroni vengono persi in
prossimità delle pareti, portando alla situazione mostrata in figura 2.1.
Si formano delle guaine (sheaths) sottili (s<<l) vicino a ciascuna parete
in cui ni>>ne. La densità di carica netta positiva all’interno degli
sheaths porta ad un profilo del potenziale (x) che è positivo all’interno
9
del plasma e diventa rapidamente zero avvicinandosi alle pareti. Questo
profilo funge da «valle» di potenziale per gli elettroni e da «collina»
per gli ioni, poichè i campi elettrici all’interno degli sheaths vanno dal
plasma alle pareti. Quindi la forza –eEx che agisce sugli elettroni è
diretta verso l’interno del plasma; questo porta ad una riflessione
all’indietro degli elettroni che si muovono verso le pareti. Al contrario,
gli ioni che dal plasma entrano negli sheaths sono accelerati verso le
pareti. Se il potenziale del plasma (rispetto alle pareti) è VP , ci si
aspetta che VP sia pari a qualche eV per confinare la maggior parte
degli elettroni. L’energia degli ioni che bombardano le pareti è quindi
essa stessa pari a qualche eV.
Il potenziale uniforme nella regione centrale della scarica è
detto invece potenziale di plasma, e la regione centrale è chiamata
glow.
Fig. 1.2 Formazione dello sheath
1.4 Modello circuitale dello sheath
La frequenza del voltaggio applicato ha un valore intermedio tra
la frequenza di oscillazione degli elettroni e quella degli ioni. Sotto
10
queste ipotesi si assume che lo sheath sia puramente capacitivo e la
regione centrale sia equipotenziale. Ragionando in termini di circuiti
elettrici, questo equivale a dire che gli sheath hanno resistenza infinita
e
il glow abbia resistenza trascurabile. Il plasma RF può essere
rappresentato come in figura:
Fig. 2.2 Circuito equivalente del modello dello sheath capacitivo
Cs1 e Cs2 sono capacità che rappresentano gli sheath, D1 e D2
sono diodi che fanno in modo che il potenziale di plasma Vs sia sempre
positivo rispetto agli elettrodi.
Nell'ipotesi in cui il comportamento dello sheath sia
puramente capacitivo, il potenziale di plasma Vp(t) è espresso come:
Vp (t) = Vp + ∆Vp sen(ωt)
(1.5)
dove V p è la media temporale del potenziale di plasma e ∆Vp
l’ampiezza della modulazione dello stesso potenziale. ∆Vp è
determinato dalla partizione della tensione Vrf secondo la:
∆Vp =
Cs1
V
Cs1 + Cs2 rf
(1.6)
dove Cs1 e Cs2 sono le capacità che rappresentano rispettivamente
lo sheath di fronte all’elettrodo sotto tensione e quello di fronte
11
all’elettrodo a terra. Il potenziale di plasma istantaneo è sempre più
elevato rispetto al potenziale agli elettrodi, ovvero:
Vp,max = Vp + ∆Vp ≥ Vrf
(1.7)
Vp,min = Vp − ∆Vp ≥ 0
Una volta ogni periodo il potenziale di plasma uguaglia tanto il
potenziale dell’elettrodo sotto tensione, quanto quello dell’elettrodo a
terra per bilanciare la corrente netta attraverso lo sheath, ovvero le 1.7
diventano uguaglianze.
I valori delle capacità si sheath, anch’essi mediati nel
tempo, sono determinati dall’area degli elettrodi ma sono anche
influenzati dal modulo delle cadute di potenziale nei due sheaths.
1.5 Diffusione ambipolare
Ai campi di sheath e bulk occorre aggiungere un terzo
elemento, il cosiddetto campo ambipolare, che è dovuto allo stesso tipo
di considerazioni, ma in assenza di campo applicato.
Si fa nel plasma l’ipotesi di congruenza, ovvero che il
flusso di elettroni e quello di ioni, dovuti tanto alla diffusione nel
campo elettrico quanto a quella per gradiente di concentrazione, siano
uguali ovunque. Questa ipotesi continua a valere in presenza di
collisioni ionizzanti, che producono un ugual numero di entrambe le
specie. Dato che gli elettroni sono più leggeri, e tenderebbero a lasciare
il plasma più velocemente, deve nascere un campo elettrico che
mantenga l’equilibrio locale del flusso.
12
Questo campo ambipolare ha l’effetto di impedire
l’accelerazione nel campo di sheath agli elettroni di bassa energia.
Questi elettroni, confinati nella regione centrale del plasma, saranno
soggetti alla sola azione del campo bulk.
Aumentando il potenziale applicato all’elettrodo aumenta il
potenziale di accelerazione degli ioni verso le pareti. La caduta di
potenziale in prossimità degli elettrodi dipende dalla superficie degli
stessi: in particolare il potenziale decade in modo inversamente
proporzionale alla superficie elettrodica. Anche la pressione influenza
l’energia del bombardamento ionico poichè un suo aumento determina
un maggior numero di urti nello sheath che rallentano gli ioni.
Inoltre, se la frequenza della scarica è minore della
frequenza con cui gli ioni attraversano lo sheath, questi ultimi sono
sensibili al potenziale istantaneo e il bombardamento ionico risulta
estremamente energetico. Quando questa condizione non è verificata
gli ioni non riescono a seguire le oscillazioni del potenziale e sono
sensibili solo al potenziale medio. Quindi, operando nella regione dei
MHz il moto delle particelle pesanti è controllato dal campo medio.
Considerando insieme gli effetti dovuti alla diffusione
ambipolare e ai campi elettrici di bulk e di sheath si osserverà un
profilo di concentrazione ionica che non cambia molto nel tempo a
causa dell’elevata inerzia degli ioni rispetto a quella degli elettroni. Per
gli elettroni si osserva invece una oscillazione.
13
1.6 Riscaldamento elettronico
Una delle questioni chiave riguardo la struttura e la
dinamica delle scariche RF è il meccanismo di riscaldamento
elettronico e il corrispondente meccanismo di ionizzazione o di
sostentamento della scarica.
Sono stati identificati tre meccanismi [7] di riscaldamento
elettronico nelle scariche glow:
1.
gli elettrodi emettono elettroni secondari, e questi elettroni si
riversano negli elevati campi di sheath ed entrano nel plasma con
notevole energia;
2.
gli elettroni nel plasma sono riscaldati dal campo elettrico
oscillante di sheath;
3.
i campi elettrici all’interno del plasma scaldano gli elettroni che
trasportano la corrente di scarica.
Il secondo meccanismo è una prerogativa esclusiva delle scariche
RF ed è stato diffusamente studiato [8,9,10,11] . Si può distinguere tra
due casi limite di riscaldamento per oscillazione dello sheath:
riscaldamento stocastico in cui gli elettroni non subiscono collisioni
con le particelle neutre mentre interagiscono col campo elettrico
oscillante di sheath, e moto dominato dalle collisioni. Il primo è detto
riscaldamento stocastico di sheath e il secondo riscaldamento ohmico
di sheath.
Il riscaldamento ohmico è detto anche regime «wave-riding»[7].
Infatti in questo caso, una volta che l’elettrone è stato «intrappolato»
nel campo elettrico durante l’espansione dello sheath, «cavalca» lo
sheath in espansione, e percepisce un campo elettrico proporzionale
alla velocità di espansione dello sheath.
14
Oltre alla distinzione tra i diversi tipi di riscaldamento
dovuti all’oscillazione dello sheath, va fatta anche una distinzione tra
scariche sostenute dall’emissione di elettroni secondari e scariche
sostenute dal riscaldamento elettronico nello sheath o nel bulk. Sono
dette scariche alfa quelle in cui il meccanismo dominante di
ionizzazione è il riscaldamento degli elettroni all’interno del plasma e
scariche gamma quelle in cui la ionizzazione avviene prevalentemenet
ad opera degli elettroni secondari.
E’ possibile passare da un regime di scarica ad un altro
variando parametri quali potenza, pressione e frequenza di scarica. Si
va dal regime alfa al regime gamma aumentando potenza e pressione,
mentre le scariche con frequenza minore di 1 MHz sono sostenute
prevalentemente dagli elettroni secondari[12].
15
16
CAPITOLO 2
CARATTERISTICHE MATEMATICHE E
FISICHE DEL MODELLO
2.1 Modello numerico per la simulazione: PIC/MCC
2.1.1 PIC
La maggior parte dei plasmi di non equilibrio di interesse è
caratterizzata da un gran numero di elettroni nella sfera di Debye: in
queste condizioni l’interazione fra particelle cariche può essere
approssimata da una interazione tra particella e campo di carica
spaziale . Questo è proprio il punto di vista del metodo PIC.
(Particle In Cell). L’ approccio del PIC consiste nel risolvere
l’equazione di Vlasov:
&
∂ & &
&
∇
+ v ⋅ ∇ + e rϕ ⋅ ∇ f (r&, v&,t ) = 0
r
v
∂t
m
(2.1)
e l’equazione di Poisson:
2
∇ ϕ (r) = −
ρ
ε0
(2.2)
assumendo una soluzione a N particelle:
N
& & & &
f (r,v,t) = w∑ δ (r − ri )δ ( v − v i )
i= 1
(2.3)
N
&
& &
&
ρ (r ,t) = −ew ∑ S( r − ri ) + ρ' ( r )
i =1
17
dove ri e vi sono le posizioni delle singole particelle, che
soddisfano le equazioni di Newton, δ è la funzione di Dirac, S è il
fattore di forma delle particelle (una δ con larghezza finita) e ρ’ è la
distribuzione di carica dovuto alle altre particelle.
Le equazione vengono risolte per un gran numero di elettroni
(104-106 ) tenendo conto del campo elettrico locale risultante
dall’interpolazione locale della carica spaziale all’interno di una cella
di un reticolo matematico. E’ praticamente impossibile effettuare la
simulazione con il numero reale di particelle, per cui le particelle
simulate sono in realtà ‘superparticelle’ con un peso matematico w
(pari al rapporto tra particelle simulate e particelle reali), con carica e
massa uguali rispettivamente a –ew ed mw. In questo modo il rapporto
q/m rimane invariato e le superparticelle si muovono come elettroni
sotto l’influenza del campo elettrico e del campo magnetico. Dopo un
passo di calcolo delle equazioni del moto, viene determinata la carica
elettrica in ogni cella del reticolo dal numero di elettroni presenti in
essa, opportunamente pesati. Dalla densità di carica elettrica,
risolvendo l’equazione di Poisson all’interno del reticolo stesso, si
ricavano il potenziale e il campo elettrico.
L’assegnazione della carica a ciascun punto, che determina
la forma di S ) consiste in una interpolazione tra i punti della griglia più
vicini alla particella. Nel caso monodimensionale esistono due ordini di
assegnazione. Nell’assegnazione di ordine zero, o NGP (nearest grid
point) si conta il numero di particelle in ciascuna cella e si assegna
questo numero al punto di griglia rappresentativo della cella.
Una assegnazione che, sebbene più complessa della NGP, è
molto meno rumorosa, è l’assegnazione di prim’ordine, o CIC (cloud in
cell). In questo caso si assegna la carica della particella ai due punti più
vicini alla cella in frazioni dipendenti dalla posizione della particella
18
stessa; ovvero, con i indice del punto di griglia e q carica della
particella:
i∆x ≤ x ≤ (i + 1)∆x
(i + 1)∆x − x
∆x
x − i∆x
=q
∆x
qi = q
qi +1
(2.4)
Le stesse formule devono essere usate per interpolare il campo
elettrico che agisce su ciascuna particella per soddisfare la
conservazione del momento per valori molto piccoli del passo
temporale.
Le equazioni di Newton nel PIC vengono risolte utilizzando un
semplice schema per posizione e velocità,
il cosiddetto metodo
Leapfrog[1,13]:
& & q & &
v ' = v + E ( r ) ∆t
m
& & &
r ' = r + v ' ∆t
(2.5)
La differenza rispetto al metodo esplicito di Eulero è
semplicemente la sostituzione di v’ con v nella seconda equazione.
Bisogna comunque notare che r è calcolato al tempo t e v è calcolato al
tempo t+∆t.
Una dettagliata descrizione del PIC si trova in Birdsall and
Langdon (1985,1991) [13,14], Vahedi,[23]Cohen[16]Longo et al.[2].
19
2.1.2 MCC
Sulla base di quanto detto finora riguardo al PIC è evidente come
esso sia in grado di riprodurre solo le interazioni tra le particelle
cariche. Ma una descrizione accurata di un plasma collisionale, quale è
quello RF, non può trascurare gli urti tra particelle cariche e specie
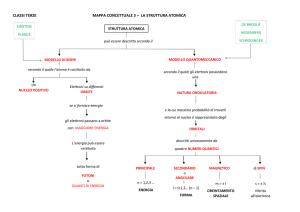
neutre. A tal fine il Particle in Cell è stato accoppiato con il metodo
Monte Carlo secondo lo schema a blocchi in figura 2.1.
Ad ogni passo di calcolo il programma risolve le equazioni del
campo e muove tutte le particelle.
Il Monte Carlo viene inserito nel ciclo calcolando la
probabilità che una particella subisca una collisione; in caso
affermativo la particella dopo la collisione rientrerà nel ciclo principale
con una nuova velocità.
Integration of equations
of motion, moving particles
Fi
v i’
Weighting
Ej
Monte Carlo Collisions
v i’
vi
xi
Weighting
∆t
Fi
(x , v )i
ρj
Integration of field
equations of grid
ρj
Ej
Figura 2.1 Schema a blocchi dell’accoppiamento PIC/MCC
Inserendo le collisioni il numero totale di particelle varia.
Poichè l’errore relativo su quantità macroscopiche, dovuto a
fluttuazioni statistiche, diminuisce con il numero di particelle*, è
*
L’errore decresce comunque piuttosto lentamente col numero n di particelle
(tipicamente come n-1/2)
20
necessario mantenere elevato quest’ultimo nella simulazione. Tuttavia,
il tempo di calcolo pone un limite al numero di particelle simulate. Nel
codice è quindi inserito un controllo che elimina metà particelle a caso
e moltiplica per due il peso statistico qualora le particelle diventino più
del doppio di quelle iniziali, mentre le raddoppia dimezzando il peso
quando sono ridotte a meno della metà rispetto a quante erano
all’inizio.
Il metodo Monte Carlo è basato sul calcolo dei tempi di
volo per la particella testata tra due successive collisioni con le altre
particelle. Questi tempi sono calcolati generando numeri casuali presi
da una distribuzione appropriata modellata secondo la fisica che regola
i processi. Si suppone che i processi siano binari ed istantanei.
I numeri casuali possono essere calcolati utilizzando il
seguente teorema della teoria delle probabilità: dato un insieme di
numeri casuali ri distribuiti uniformemente tra zero ed uno, un insieme
di numeri casuali yi distribuiti secondo la funzione f(y) nell’ intervallo
(a,b) è dato da:
∫
yi
a
b
f (x)dx = ri ∫a f (x)dx
(2.6)
Dopo aver calcolato l’integrale, l’equazione 2.3 diventa una
equazione in yi.
Dato che l’insieme di numeri ri può essere fornito per mezzo di
una routine generatrice di numeri casuali dal calcolatore, si può
simulare ogni processo fisico casuale caratterizzato da distribuzioni
note di probabilità.
Il tempo che trascorrerà fino alla successiva collisione va
calcolato conoscendo la frequenza di collisione in funzione della
velocità elettronica.Il modo migliore per risolvere questo problema è di
21
introdurre una specie nulla in modo che in una collisione tra elettrone e
specie nulla (collisione nulla) la velocità elettronica rimane
invariata[17].
Figura 2.2 Probabilità di collisione e collisione nulla
La sezione d’urto per la collisione nulla è scelta al fine di
ottenere una frequenza totale di collisione νtot costante, data da :
ν tot
1
2ε 2
= max ∑ N p (x)σ p ( ε )
x ∈V , 0 ≤ε ≤ ε lim
me p
(2.7)
dove la somma è fatta su ogni processo di collisione p, σp(ε) è la
sezione d’urto, Np è la densità del partner collisionale, V è l’estensione
spaziale del sistema e εlim è il limite della scala di energia cinetica usata
per calcolare le sezioni d’urto. Si è usata la seguente approssimazione:
dato che gli elettroni si muovono molto più velocemente delle
22
molecole, possiamo semplificare il calcolo delle frequenze di collisione
assumendo che le particelle obiettivo siano ferme.
Con una frequenza di collisione costante, i tempi di
collisione sono distribuiti secondo [18].
f (t ) = ν tot exp(−ν tot t )
(2.8)
Il tempo prima della successiva collisione è ottenuto usando
l’equazione 2.3 nella forma
tc = −
1
ln η
ν tot
(2.9)
dove η è un elemento di un insieme di numeri casuali
uniformemente distribuiti tra zero e uno. Il tipo di collisione (incluso
quello nullo) che si verifica dopo il tempo di volo libero viene scelto in
base alle corrispondenti frequenze di collisione : sia
1
2ε 2
&
ν k (ε ) = σ k (ε )nk ( r )
me
(2.10)
il contributo dell’elettrone k-esimo alla frequenza totale di
collisione. Dopo aver generato il numero casuale r, il processo di
collisione scelto sarà l’n-esimo con n tale che
n −1
n
νk
νk
r
<
<
∑
∑
k =1 ν tot
k =1 ν tot
(2.11)
23
Figura 2.3 Selezione del processo collisionale
2.2 Modifica del ciclo temporale
Consideriamo le modifiche al normale ciclo tempo
temporale che sono richieste al fine di incorporare in Monte Carlo nel
PIC.
Questa modifica è fondamentale per poter permettere che
le collisioni avvengano anche più volte all’ interno del passo di calcolo
PIC [19].Quest’ultimo è il tempo che trascorre tra due successivi
aggiornamenti del campo.
24
Figura 2.4 Modifica del ciclo temporale
Dopo aver calcolato per la prima volta il tempo di volo
libero, le particelle vengono fatte muovere utilizzando il metodo
Leapfrog in cui, però, il passo di calcolo ∆t è sostituito dal tempo di
volo libero tc. A questo punto, se tc è minore del passo di calcolo ∆t la
particella subisce una collisione e tc viene sottratto a ∆t. Si determina il
tipo di collisione e si calcola un nuovo tempo di volo libero che viene
confrontato con la parte restante del passo di calcolo.
Se, ancora una volta, tc risulterà più piccolo, la particella subirà
una nuova collisione e si ripeterà la procedura già vista. Diversamente,
le particelle vengono fatte muovere per la parte restante del passo di
calcolo ∆t e l’eccesso di tc viene immagazzinato come tempo di volo
libero iniziale nel successivo passo di calcolo.
25
2.3 Accoppiamento del modello con la cinetica
A questo punto è utile una precisazione: durante i processi
collisionali, le ∼100000 particelle della simulazione sono considerate
come un campione preso dalla reale distribuzione di tutte le particelle
nel plasma, mentre durante il calcolo del campo le particelle assumono
lo status di superparticelle, in modo da apportare il giusto contributo di
carica.
Un’altra importante caratteristica delle particelle neutre (e
del gas in generale) nel modello PIC/MCC è che si assume che esse
siano distribuite uniformemente nello spazio, e quindi non sono seguite
come particelle. Vedremo invece adesso come, tramite la cinetica
reattiva e diffusiva, le neutre saranno considerate come particelle e la
loro cinetica sarà accoppiata alla dinamica delle particelle cariche.
Questo accoppiamento è insito nella concezione di plasma:
l’equazione 2.4 mostra che la frequenza di collisione dipende dalla
composizione chimica del gas, ovvero la cinetica chimica influenza la
dinamica. Allo stesso tempo nel prossimo capitolo si vedrà come la
velocità di reazione dipenda fortemente dalla funzione di distribuzione
dell’energia elettronica*.
L’accoppiamento che si deve realizzare deve essere
autoconsistente, ovvero la dinamica e la cinetica chimica devono essere
risolte tenendo conto della loro reciproca connessione.
Il diagramma in figura 2.5 illustra la linea guida dell’intero
modello
Durante i calcoli, le densità delle differenti specie devono
essere aggiornate risolvendo le equazioni appropriate. In particolare, le
*
La forma non Maxwelliana della eedf infatti non permette che il coefficiente di velocità di una
reazione venga espresso in termini di parametri macroscopici quali ad esempio la temperatura
elettronica.
26
densità delle particelle cariche sono ottenute direttamente dalla
simulazione PIC/MCC mentre quelle dei neutri vengono aggiornate
risolvendo le equazioni reattive e diffusive tenendo conto del fatto che i
parametri che rientrano in queste equazioni non sono costanti ma
dipendono dalla funzione distribuzione locale dell’energia degli
elettroni, che pertanto deve essere calcolata per prima.
CONDIZIONI
AL
CONTORNO
EQUAZIONE DI
POISSON
Campo
elettrico
EQUAZIONI DI
REAZIONE E
DIFFUSIONE
eedf
Densità
particelle
cariche
Carica
spaziale
DINAMICA
DELLE
PARTICELLE
CARICHE
Composizione del gas
Figura 2.5 Schema a blocchi del modello
Durante la simulazione PIC/MCC, la eedf viene campionata su di
una griglia spaziale impiegata anche per la cinetica diversa da quella
utilizzata nella risoluzione della equazione di Poisson. Le due griglie
hanno una densità di punti diversa: la griglia per la cinetica ha 50 punti
mentre quella per l’equazione di Poisson ne ha 400. Questo permette di
ridurre le fluttuazioni statistiche nel calcolo dei coefficienti di velocità
delle reazioni chimiche considerate.
27
Come vedremo in seguito, anche la temperatura viene
calcolata sulla griglia per la cinetica, come è da attendersi essendo in
questo lavoro interessati alla temperatura del gas.
Il metodo utilizzato consiste nel risolvere la cinetica, fino
al raggiungimento dello stato stazionario, a tempi diversi tk durante la
simulazione PIC/MCC. Questa tecnica adiabatica sebbene opposta alla
più naturale (essendo i tempi caratteristici di plasma molto più piccoli
rispetto a quelli della cinetica) si rivela molto efficace poichè i tempi di
calcolo necessari per la risoluzione delle equazioni della cinetica e
della diffusione sono trascurabili in confronto a quelli richiesti per la
descrizione delle particelle cariche nel plasma.
Ad ogni tk i valori dei coefficienti di velocità e le densità
elettroniche sono quelle che si ottengono dalla simulazione PIC/MCC,
mediati nel periodo tk-tk-1.
L’utilizzo di questo metodo di accoppiamento rende quindi
impossibile una descrizione temporale sensata prima che venga
raggiunta la stabilità.
28
2.4 Dinamica delle collisioni
Per quanto riguarda il trattamento delle collisioni binarie, se
consideriamo due particelle che collidono, con masse m1 ed m2 e
velocità v1 e v2 , il trattamento è semplificato scomponendo le velocità
in velocità del centro di massa vc e velocità relativa vr, cioè
& &
v1 = vc +
m1 &
vr
m1 + m2
&
&
v2 = vc −
m1 &
vr
m1 + m2
(2.12)
Il processo di collisione può soltanto cambiare la velocità
reòativa, secondo il guadagno di energia interna ∆ε e gli angoli di
scattering θ e ϕ. In questo modo può essere introdotto ogni processo
collisionale che lascia invariato il numero totale di particelle: la
generalizzazione ad altri processi quali la ionizzazione o l’attachment
elettronico non presenta particolari difficoltà.
Per affrontare il problema del trasferimento di energia
definiamo due sezioni d’urto: la sezione d’urto totale elastica
π
σ te = 2π ∫ σ (ϑ , ε )sin ϑ dϑ
0
(2.13)
e la sezione d’urto di momentum transfer
π
σ m = 2π ∫0 σ (ϑ , ε )(1 − cos θ )sin ϑdϑ
29
(2.14)
dove (1 - cosθ) è la frazione di momento iniziale mv persa dalla
particella incidente e σ(θ,ε) è la sezione d’urto differenziale.
Nella collisione elastica di un proiettile di massa m1 e
velocità v1 con un bersaglio stazionario di massa m2 , la conservazione
del momento lungo la direzione di v1 e perpendicolarmente ad essa e la
conservazione dell’energia possono essere scritte nel sistema
laboratorio come
m1v1 = m1v1 ' cosϑ1 + m2v2 ' cosθ 2
0 = m1v1 ' sin θ1 − m2v2 ' sin θ 2
(2.15)
1
1
1
m1v12 = m1v1 '2 + m2v2 '2
2
2
2
dove gli apici denotano i valori dopo la collisione. Risolvendo il
sistema eliminando v1’ e θ1 si ottiene
1
1
4m1m2
m2v2 '2 = m1v12
cos 2 θ 2
2
2
2
(m1 + m2 )
(2.16)
Guardando l’equazione 2.13 si vede che la frazione di energia
persa dal proiettile nel sistema laboratorio è
ζL =
4m1 m 2
(m1 + m 2 )
2
cos 2 θ 2
(2.17)
Trasformando l’angolo per portarci nel sistema del CM si ottiene
ζL =
4m1 m 2
(m1 + m 2 ) 2
(1 − cos Θ)
(2.18)
30
A questo punto si media sulla sezione d’urto differenziale per
ottenere la perdita media:
ζL
Θ
=
2m1m2 σ m
(m1 + m2 ) 2 σ te
(2.19)
Gli elettroni quindi trasferiscono poca energia nelle collisioni
elastiche con particelle pesanti, facendo in modo che Te>>Ti in una
tipica scarica. Invece, per m1≈m2 si ottiene ζ L
Θ
=
1
, che comporta un
2
forte scambio di energia tra particelle pesanti e quindi una temperatura
comune.
31
32
CAPITOLO 3
REAZIONI ED ENERGIA
3.1 Specie neutre presenti nel modello
Le specie neutre presenti nel nostro modello sono sette:
O2(X3Σ-g)
stato fondamentale
O2(a1∆g)
primo stato metastabile[O2*]
O2(b1Σ+g)
secondo stato metastabile[O2**]
O3
O(3P)
stato fondamentale
O(1D)
primo stato metastabile[O*]
O(1S)
secondo stato metastabile[O**]
All’ inizio della simulazione queste sette specie sono state
immesse con le seguenti densità e relative pressioni parziali* :
densità(m-3)
3.42×1021
1.66×1020
1.34×1019
9.50×1017
2.44×1019
5.12×1017
3.53×1015
specie
O2
O2*
O2**
O3
O
O*
O**
pressione parziale
1.062×10-1
5.135×10-3
4.160×10-4
2.950×10-5
7.580×10-4
1.590×10-5
1.100×10-7
Inoltre il numero iniziale di elettroni è stato posto uguale a
5x1015
Una volta partita la simulazione, gli elettroni vengono accelerati
dalla tensione alternata applicata e, collidendo con le specie pesanti,
*
Si è usata per le pressioni parziali la formula p=ρRT, con R costante dei gas e T temperatura del
gas
33
vanno a eccitarle o diseccitarle ma anche a ionizzarle, producendo altri
+
-
-
+
protagonisti della simulazione: gli ioni O2 ,O ,O2 ,O .
A loro volta le componenti pesanti, ionizzate o meno,
interagiranno tra di loro in reazioni di ricombinazione, attachment e
detachment che vedremo in dettaglio in seguito.
3.2 Sezioni d’urto e costanti di velocità
Tutte le reazioni che vedono un elettrone collidere con l’ossigeno
neutro atomico o molecolare sono caratterizzate da una sezione d’urto
dipendente dall’energia.
In questo modo si ha una descrizione a livello microscopico del
sistema, per cui una reazione ha una maggiore o minore proabilità di
verificarsi (corrispondente ad un intervallo più o meno ampio entro cui
deve cadere il numero casuale generato) a seconda dell’ energia dell’
elettrone incidente*.
Le reazioni tra gli ioni e le reazioni da impatto elettronico
con gli ioni e con l’ozono sono invece descritte dalla costante di rate K,
definita in modo che il rate della reazione (il numero di reazioni
elementari del tipo e-+A→prodotti che avvengono per unità di tempo e
di volume) sia dato da:
v = Kne n A
(3.1)
dove nA è la densità molare di A e ne è la densità numerica degli
elettroni.
*
vedremo che questa energia è presa da un profilo non maxwelliano della eedf (electron energy
distribution function)
34
La costante di rate ha pertanto le dimensioni di cm3 mol-1 sec-1 e
ha il significato fisico di una integrazione sulla distribuzione di energia
elettronica e sulla sezione d’urto del processo:
2
K =
me
1
2 ∞
∫ εf (ε )σ (ε )dε
(3.2)
εth
dove f è la eedf, me è la massa dell’elettrone e σ è la sezione
d’urto del processo elementare.
Il secondo membro dell’ equazione 3.2 dipende dalla eedf e a
causa della forma decisamente non Maxwelliana di quest’ultima nei
plasmi freddi non può essere scritta come una funzione dei parametri
macroscopici quali la temperatura elettronica.[20]. I dati da noi
utilizzati provengono infatti da dati sperimentali.
Da quanto specificato nel secondo capitolo, le reazioni per
cui non è disponibile il set di sezioni d’urto non possono essere trattate
con il metodo delle collisioni nulle.
Si procede allora calcolando la probabilità che il
protagonista della reazione scompaia nel passo di calcolo ∆t attraverso
la seguente relazione [14]:
P = 1 − exp(− ν coll ∆t )
(3.3)
dove νcoll è la frequenza di collisione. Per ogni particella νcoll sarà
la somma della frequenza di collisione per tutti i processi di cui essa è
protagonista. I processi che noi consideriamo sono tutti processi del
secondo ordine, per cui la definizione di frequenza è:
35
ν coll = ∑i Ki [S ]
(3.4)
dove la somma è estesa a tutti i processi di cui la particella è
protagonista, con Ki costante di velocità del processo i-esimo e [S ]
densità numerica della specie compagno.
Si estrae quindi un numero casuale compreso tra zero ed
uno e lo si confronta con P. Se è minore, si verifica un processo di
perdita della particella protagonista.
3.3 Reazioni da impatto elettronico
Sono riportate qui di seguito le reazioni presenti nella
simulazione, insieme alle rispettive sezioni d’urto o costanti di rate e
alla fonte sperimentale. Inoltre in corrispondenza di ogni reazione si
trova il guadagno o la perdita di energia nel plasma che essa comporta.
3.3.1 Eccitazioni verso stati metastabili
• e- + O2* → O2** + e- [21]
perdita di 0.64 eV
• e- + O2 → O2* + e-
[21]
perdita di 0.98 eV
• e- + O2 → O2** + e-
[21]
perdita di 1.627 eV
• e- + O → O*+ e-
[22]
perdita di 1.97 eV
• e- + O → O** + e-
[22]
perdita di 4.18 eV
Le eccitazioni generano diversi stati metastabili dell’ossigeno
molecolare (a1∆g, b1Σg, c1Σ-u, A3Σ+u) e atomico e sono importanti
meccanismi di perdita di energia elettronica, oltre a permettere la
ionizzazione dagli stati metastabili.
36
3.3.2 Diseccitazioni
• e- + O2* → O2 + e-
[21]
guadagno di 0.98 eV
• e- + O2** → O2* + e-
[21]
guadagno di 0.64 eV
• e- + O2** → O2 + e-
[21]
guadagno di 1.627 eV
• e- + O* → O + e-
[22]
guadagno di 1.97 eV
• e- + O** → O + e-
[22]
guadagno di 4.18 eV
Le diseccitazioni sono delle collisioni superelastiche, in cui un
elettrone urta una specie pesante che si trova in uno stato eccitato e
guadagna l’energia di soglia del processo, mentre la specie pesante si
diseccita.
Le sezioni d’urto per questi processi vengono calcolate a
partire da quelle dei corrispondenti processi anelastici attraverso la
seguente relazione:
gεσ sup (ε ) = g * (ε + ∆ε )σ an (ε + ∆ε )
(3.5)
dove g e g* sono, rispettivamente, le degenerazioni dello stato
fondamentale ed eccitato della specie pesante e ∆ε è l’energia di soglia
del processo.
37
10
0
1
*
e- + O( ∆ ) -> O + e2
2
*
O + e- -> e- + O( ∆ )
2
2
-1
10
σ(cm
2
-16
)
-2
10
1
2
-3
10
-1
-1
6 10 8 10 10
0
3 10
0
0
5 10 7 10
0
Energia(eV)
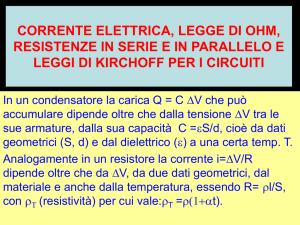
Figura 3.1 Diseccitazione(1) ed Eccitazione(2) tra lo stato fondamentale ed il
primo metastabile dell’O2
-1
10
1
σ(cm
-16
)
1
*
e- + O(Σ ) -> O + e2
10
-2
2
2
*
O + e- -> e- + O
(Σ )
2
2
2
10
-3
10
0
Energia(eV)
10
1
Figura 3.2 Diseccitazione(1) ed Eccitazione(2) tra lo stato fondamentale ed il
secondo metastabile dell’O2
38
10
0
*
1
*
O(Σ )+e- ->e- + O (∆)
2
2
*
2
*
e- + O(∆) -> O (Σ )+e2
10
σ(cm
2
-1
-16
)
10
-2
1
10
2
-3
10
-3
10
-2
-1
10
Energia(eV)
10
0
10
1
Figura 3.3 Diseccitazione(1) ed Eccitazione(2) tra i primi due stati metastabili
dell’O2
10
1
1
2
10
σ(cm
-
* 1
3
-
e
+ O ( D) -> O(P) + e
3
-
-
* 1
O(P) + e -> e
+ O ( D)
0
-16
)
10
-1
1
2
10
-2
10
-3
10
-2
-1
10
Energia(eV)
10
0
10
1
Figura 3.4 Diseccitazione(1) ed Eccitazione(2) tra lo stato fondamentale ed il
primo metastabile dell’ossigeno atomico
39
10
1
1
2
10
σ(cm
-
* 1
3
-
e
+ O ( D) -> O(P) + e
3
-
-
* 1
O(P) + e -> e
+ O ( D)
0
-16
)
10
-1
1
2
10
-2
10
-3
10
-2
-1
10
Energia(eV)
10
0
10
1
Figura 3.5 Diseccitazione(1) ed Eccitazione(2) tra lo stato fondamentale ed il
secondo stato metastabile dell’ossigeno atomico
3.3.3. Dissociative attachments O2
• e- + O2 → O + O-
[21]
perdita di 4.2 eV
• e- + O2* → O + O-
[21]
perdita di 3.22 eV
• e- + O2** → O + O-
[21]
perdita di 2.573 eV
Viene riportata la sezione d’urto solo per il primo dei tre
processi. Le sezioni d’urto per gli altri due si ottengono traslando le
curve verso valori decrescenti dell’energia di 0.98 e 1.627 eV, pari alle
distanze in eV tra il ground state e i primi due livelli eccitati, rendendo
ovviamente più agevole il processo.
40
La reazione di attachment dissociativo è il principale
meccanismo di creazione di ioni negativi e di perdita di energia
elettronica nel bulk. L’elettrone incidente perde l’energia di soglia di
4.2 eV ed è assorbito dalla molecola di ossigeno per formare uno ione
O2- che si dissocia in O e O-. Si assume che la transizione elettronica
sia rapida su scala nucleare [24] e ciò che rimane dell’energia incidente
dell’elettrone è divisa tra i frammenti. Dato che la sezione d’urto per
questo processo ha il picco intorno ai 6.5 eV i frammenti avranno
energie dell’ordine di 1-2 eV.
3.3.4 Ionizzazioni
• e- + O2 → O2+ + 2e-
[21]
perdita di 12.06 eV
• e- + O2* → O2+ + 2e-
[21]
perdita di 11.08 eV
• e- + O2** → O2+ + 2e- [21]
perdita di 10.43 eV
• e- + O → O+ + 2e-
[22]
perdita di 13.61 eV
• e- + O* → O+ + 2e-
[25]
perdita di 11.65 eV
• e- + O** → O+ + 2e-
[25]
perdita di 9.43 eV
La ionizzazione è l’unica reazione che produce ioni positivi nel
sistema. Si crea una coppia elettrone-ione e il bilancio energetico si
scrive:
ε scat + ε prod + ε i = ε inc + ε N − ε ion
(3.6)
dove εinc, εscat e εprod sono le energie rispettivamente dell’elettrone
incidente prima e dopo la collisione e dell’elettrone rilasciato dallo
ione; εi e εN somo le energie dello ione creato e della neutra bersaglio e
41
εion è l’energia di soglia della ionizzazione. A causa dell’elevato valore
del rapporto tra le masse dello ione e dell’elettrone si può supporre che
l’elettrone incidente “strappi” un elettrone dalla particella neutra e che
questa diventi uno ione, continuando la sua traiettoria indisturbata.
Possiamo riscrivere l’equazione 3.6 come
ε scat + ε prod = ε inc − ε ion
(3.7)
εi = ε N
L’energia dopo la collisione viene distribuita tra i due
elettroni generando un numero casuale R ∈[0,1]. L’energia
dell’elettrone prodotto sarà:
ε prod = R
ε inc − ε ion
2
(3.8)
e la 3.7 dà l’energia dell’elettrone scatterato.
3.3.5 Eccitazione dissociativa
• e- + O2 → e- + O + O (3P)
[21]
perdita di 14.7 eV
Nelle dissociazioni l’elettrone perde l’energia di soglia di
6, 8.4, 9.97 o 14.7 eV ed eccita elettronicamente la molecola di O2 in
uno stato che si dissocia in due O. Queste reazioni sono i principali
meccanismi responsabili di produzione di ossigeno atomico nel bulk.
Vengono riportate le sezioni d’urto solo per i processi che
hanno come specie di partenza lo stato fondamentale dell’O2. Le
sezioni d’urto per i processi che hanno come specie bersaglio i primi
42
due stati metastabili si ottengono traslando le curve verso valori
decrescenti dell’energia di 0.98 e 1.627 eV, pari alle distanze in eV tra
il ground state e i primi due livelli eccitati, rendendo ovviamente più
agevole il processo.
10
10
σ(cm
1
1
2
3
0
Attachment dissociativo (4.2eV)
Ionizzazione (12.06 eV)
Eccitazione dissociativa(14.7 eV)
2
-16
)
-1
10
3
1
-2
10
1
-3
10
10
-2
10
-1
10
0
10
1
10
2
Energia(eV)
Figura 3.6 Sezioni d’urto per attachment dissociativo, ionizzazione e
eccitazione dissociativa dell’O2
10
σ(cm
0
*
+
*
+
1
e- + (1S)
O
-> 2e- + O
2
e- + (1D)
O
-> 2e- + O
3
e- + O(3P) -> 2e- + O
+
-16)
10
-1
1
2
10
0
10
Energia(eV)
1
3
10
2
Figura 3.7 Sezioni d’urto per le ionizzazioni dei primi tre stati dell’ossigeno
atomico
43
3.3.6 Perdite di 4.5, 6.0, 8.4 e 9.97 eV
L’identificazione delle suscritte perdite di energia con processi
specifici non è definita con precisione e non c’è accordo tra i vari
sperimentatori[26].I candidati più probabili per queste perdite di
energia sono[15]:
• e- + O2 → e- + O2(c1Σ-u, A3Σ+u)
[21]
perdita di 4.5 eV
• e- + O2 → e- + O + O
[21]
perdita di 6.0 eV
• e- + O2 → e- + O + O*
[21]
perdita di 8.4 eV
• e- + O2 → e- + O* + O*
[21]
perdita di 9.97 eV
Processi analoghi, con sezioni d’urto e perdite di energia
opportunamente shiftate, si hanno per impatto di elettroni con i primi
due stati metastabili dell’O2.
10
10
σ(cm
1
1
2
3
4
0
4.5
6.0
8.4
10
eV
eV
eV
eV
Loss
Loss
Loss
Loss
3
-16
)
-1
10
2
4
1
10
-2
10
-3
10
-2
10
-1
10
0
Energia(eV)
Figura 3.8 Sezioni d’urto per i processi di energy loss
44
10
1
10
2
3.3.7 Momentum transfer
• e- + O2 → e- + O2
In questo caso l’equazione 2.16 ci dice che la perdita di energia
media è dell’ordine di 10-4 a causa del rapporto tra le masse, per cui in
una scarica tipica si ha Te>>Ti. Sebbene questa perdita di energia sia
bassa, questa collisione elastica è l’unico meccanismo di perdita di
energia per gli elettroni con energia minore delle soglie di ionizzazione
ed eccitazione, ed è anche abbastanza frequente a causa della sua
elevata sezione d’urto.
10
2
-
-
e + O -> e + O
2
10
σ(cm
2
1
-16
)
10
10
10
0
-1
-2
10
-2
10
-1
10
0
1
10
Energia(eV)
10
2
Figura 3.9 Sezione d’urto per il momentum transfer e-/O2
45
10
3
10
4
3.3.8 Dissociative attachment O3
• e- + O3 → O-2 +O
perdita di 0.61 eV
K = 6.02 × 108 cm3/mol sec [27]
3.3.9
Ricombinazioni
• 2e- + O2+ → O2 + e-
guadagno di 12.14 eV
K = 2.61 × 109 cm3/mol sec [28]
• 2e- + O+ → O + e-
guadagno di 11.05 eV
K = 2.61 × 109 cm3/mol sec
[28]
Tra le possibili eccitazioni da impatto elettronico abbiamo
tralasciato le eccitazioni rotazionali e vibrazionali. Per quanto riguarda
le prime, hanno una sezione d’urto minore di alcuni ordini di grandezza
rispetto agli altri processi e sono relativamente poco importanti in un
quadro globale. Le eccitazioni vibrazionali invece sono molto
importanti ai fini della funzione di distribuzione dell’energia
elettronica. Infatti questi processi hanno una sezione d’urto diversa da
zero solo per piccoli intervalli di energia, e questo comporta una forma
della eedf decisamente non maxwelliana. Ai fini della raccolta di
energia, però, si vede che il rilassamento vibrazionale è molto rapido
nell’ossigeno[29] e che tutta l’energia che andrebbe ad eccitare
vibrazionalmente
la
molecola
46
viene
rapidamente
rilasciata
prevalentemente mediante la reazione O2(v) + O → O2(v-1) + O (dove
v indica il numero quantico vibrazionale). Questa rapidità di
diseccitazione si riflette peraltro sulla forma della eedf, che comunque
anche nel nostro modello si rivela non maxwelliana in accordo con le
previsioni e con i dati sperimentali.
3.3.10
Collisioni tra specie pesanti
• O- + O → O2 + e-
guadagno di 3.66 eV
K = 3.00×108 [30]
• O- + O2** → O + O2 + e-
perdita di 1.37 eV
K = 4.16×108 [30]
• O- + O2** → O3 + e-
perdita di 0.32 eV
K = 1.81×108 [28]
• O- + O2* → O2- + O
perdita di 0.13 eV
K = 6.02×107 [30]
• O-2 + O+2 → 2 O2
K = 1.2×1011
guadagno di 11.7 eV
[30]
47
• O-2 + O+ → O2 + O
K = 1.2×1011
guadagno di 10.61 eV
[30]
• O- + O+2 → O2 + O
guadagno di 10.68 eV
K = 1.15×1011 [28]
• O-2 + O → O- + O2
K = 1.99×108
guadagno di 1.02 eV
[28]
• O-2 + O → O3 + eK = 1.99×108
guadagno di 0.61 eV
[28]
• O-2 + O+2 → O2 + 2 O
guadagno di 6.58 eV
K = 2.90×1010 [28]
• O2 + O2- → 2 O2 + e-
guadagno di 0.46 eV
K = 1.20×108 [28]
• O+ + O- → 2 O
guadagno di 9.59 eV
K = 1.20×108 [28]
3.3.11
Scambio di carica
• O+2 + O2 → O2 + O+2 [21]
• O-2 + O2 → O2 + O-2 [21]
In un processo di scambio di carica si assume che un
elettrone salti dal neutro sullo ione, per diventare uno ione con velocità
uguale a zero nel sistema di riferimento del neutro. Ritornando nel
sistema di riferimento del laboratorio, il nuovo ione possiede la velocità
48
del neutro incidente, e il nuovo neutro acquista la velocità dello ione
incidente.
Nel nostro caso, lo ione prodotto è orientato a caso con
velocità corrispondente all’energia traslazionale termica 3/2kT:
3kT
mione
v=
(3.9)
dove k è la costante di Boltzmann e T è la temperatura
traslazionale del gas. Si vedrà quindi come gli ioni prodotto acquistino
maggiore velocità al centro della scarica, dove la temperatura è
maggiore.
3.3.12
Momentum transfer
• O- + O2 → O- + O2
• O+ + O2 → O+ + O2
σ(cm
10
4
10
3
10
2
momentum transfer
O-/O2
-16
)
1
10
scambio di carica
O2+/O2
10
0
10
-1
10
-2
10
-3
10
-3
10
-2
10
-1
10
0
10
1
10
2
10
3
Energia(eV)
Figura 3.10 Sezioni d’urto per scambio di carica e momentum transfer tra
specie pesanti
49
3.3.13 Emissione secondaria
Un altro meccanismo per cui nuovi elettroni possono
entrare nel plasma è quello di emissione secondaria in seguito al
bombardamento del catodo da parte degli ioni positivi. In input viene
dato il coefficiente di emissione secondaria γ, pari a 0.30. Ancora una
volta si estrae un numero casuale: se è minore di γ si verifica una
emissione.
3.4 Verso l’equazione del calore
La figura 3.11 illustra i canali di dissipazione dell’energia in una
scarica RF in ossigeno così come sono considerati nel presente
modello. Il punto di partenza è la densità totale di potenza elettrica
dissipata per unità di volume nel bulk del plasma, mentre il punto di
arrivo è l’energia dissipata sulle pareti e per irradiazione.
Figura 3.11 Canali di dissipazione dell’energia
50
Il
primo
passo
della
dissipazione
di
potenza
è
l’accelerazione degli elettroni per mezzo del campo elettrico di scarica.
Il secondo passo sono le collisioni inelastiche degli
elettroni con le molecole di O2, che hanno come conseguenza la
dissociazione o l’eccitazione.
Durante la dissociazione da impatto elettronico, una
frazione dell’energia è rilasciata in energia in eccesso dei frammenti
atomici. Questi atomi di ossigeno “caldi” rilasciano rapidamente la loro
energia cinetica in collisioni elastiche o inelastiche, andando
nuovamente ad eccitare le molecole.
Gli ioni sono poi accelerati verso le pareti. Durante questo
trasporto diffusivo gli ioni possono dar luogo a reazioni esotermiche
con altri ioni o molecole, per cui una frazione dell’entalpia dello stato
fondamentale degli ioni sarà rilasciata nel gas [31].
I canali di perdita di questa energia sono i seguenti:
- dissociazione da impatto elettronico
- reazioni chimiche
- diffusione
- energia trasferita ai fotoni
In particolare è stato stimato che il contributo alla dissipazione di
potenza degli elettroni termici, dell’accelerazione degli elettroni
secondari, e dagli ioni negli sheaths sia pari rispettivamente al 15%, al
5% e all’80% rispettivamente [32].
Si trascura il contributo dell’energia trasferita ai fotoni:la
densità di potenza dell’emissione del plasma tra 300 e 900 nm,
misurata con un radiometro, è pari ad una parte su 105 di tutta la
potenza dissipata [33].
51
Nel presente modello la temperatura delle pareti è fissata ed è
una condizione al contorno per l’equazione di diffusione del calore nel
corpo del plasma, che è uno degli obiettivi di questo lavoro.
Ciononostante si è fatta una stima di quanta sia l’energia persa nelle
collisioni ioni-parete.
Ricordiamo inoltre che ci troviamo nel regime per cui il
meccanismo dominante di dissipazione di potenza elettrica è il
fenomeno di “wave riding” dovuto all’alternarsi di espansione e
contrazione dello sheath.
Questa energia persa si configura come un flusso di calore
q dal plasma agli elettrodi. Esperimenti a diverse pressioni hanno
mostrato che q è costante rispetto al tempo ad alla temperatura delle
pareti [33]. Dal fatto che q è costante deriva che il contributo al flusso
di calore delle molecole con elevata energia cinetica che colpiscono le
pareti è piccolo. Gli elettroni che arrivano agli elettrodi hanno peraltro
energie bassissime. Si può concludere quindi che il flusso di calore dal
plasma
agli
elettrodi
è
causato
quasi
esclusivamente
dal
bombardamento di ioni positivi.
Dato che l’energia degli ioni in prossimità delle pareti è
dell’ordine di qualche centinaio di eV, possono essere tralasciate
correzioni riguardanti la perdita di energia degli elettroni secondari, che
hanno energie inferiori a pochi eV.
Da quanto detto, si può concludere che il calcolo della
temperatura nel plasma è un metodo valido per calcolare il flusso di
energia dovuto agli ioni, una quantità che non è facilmente ottenibile
con altri metodi.
52
3.5 L’equazione del calore
3.5.1 Il termine sorgente
L’obiettivo è adesso quello di determinare come la
dissipazione di energia elettrica influenzi la temperatura del plasma;
dobbiamo cioè trovare una equazione da inserire nel programma di
simulazione. L’equazione che fa al caso nostro è ovviamente
l’equazione di diffusione del calore. Essa si presenta in due forme, una
dipendente dal tempo, l’altra indipendente.
L’equazione di cui ci serviremo è quella allo stato
stazionario (vedi discussione alla fine del paragrafo 2.3). Inoltre, per gli
stessi motivi ivi esposti, essa interverrà non certo in ogni ciclo
temporale (dell’ordine di 10-11secondi), ma ogni 50000, parallelamente
all’inserimento della cinetica, con l’avanzamento delle particelle neutre
e il calcolo delle funzioni di distribuzione dell’energia.
La forma di questa equazione è
d dT
k + S = 0
dx dx
(3.10)
dove k è la conduttività termica e S è il termine sorgente.
La sorgente ha le dimensioni di un flusso di energia, ovvero
Joule/m3sec. Quindi l’energia netta proveniente dalle collisioni va
divisa per il tempo trascorso dall’ultima volta che essa è stata raccolta
(nel nostro caso 50000 volte il time step) e per l’intervallo spaziale
monodimensionale in cui questa energia è stata raccolta. Ricordiamo
che essendo il nostro un modello unidimensionale l’energia raccolta
nelle collisioni è già una energia per metro quadro, essendo le cariche
stesse rappresentate come se fossero dei fogli di carica.
53
Per quanto riguarda le collisioni degli elettroni con O2 e O,
e i processi di scambio di carica e momentum transfer tra ioni, ovvero
quei processi che sono stati descritti tramite le loro sezioni d’urto,
l’energia di attivazione o quella rilasciata è stata rispettivamente
sottratta o aggiunta all’energia cinetica degli elettroni dopo la
collisione. La variazione positiva o negativa dell’energia nel gas è stata
quindi determinata confrontando l’energia cinetica delle particelle in
ingresso ed in uscita dalla subroutine che tratta queste collisioni.
Il bilancio di energia per gli altri processi è stato calcolato
aggiungendo o sottraendo energia ogniqualvolta che si verificava ogni
singolo processo.
Il termine sorgente non è però costituito esclusivamente
dai contributi provenienti dalle collisioni; deve infatti contenere anche
l’altro canale di dissipazione dell’energia: l’irraggiamento.
Studi sperimentali [33] hanno infatti mostrato come esso
giochi un ruolo cruciale nella dispersione del calore.
Il termine usato per tener conto dell’irraggiamento è la formula
dell’irraggiamento da corpo nero, per cui il calore irraggiato da una
superficie di area unitaria è dato da
σ (T 4 − T04 )
(3.11)
dove T0 è la temperatura del reattore e σ è la costante di StefanBoltzmann, pari a 5.67 × 10-8 W m-2 K-4.
Nel considerare gli ultimi due contributi al termine
sorgente, ovvero i processi caratterizzati dalla costante di velocità e
l’irraggiamento, si è dovuto tener conto dell’effettivo volume
tridimensionale della scarica. Le proprietà del plasma che andiamo ad
54
investigare con un modello unidimensionale sono grandezze intensive
(densità, energia e velocità di ogni singola particella), quindi
l’assunzione ovviamente irrealistica che la scarica misuri un metro
quadro in due piani perpendicolari alla direzione lungo la quale avviene
la simulazione non inficia il valore dei risultati ottenuti.
Quando però si va ad inserire il termine dovuto
all’irraggiamento, già l’analisi dimensionale mostra che, per ottenere
un flusso di energia, espresso in W/m3, l’equazione 3.11 va moltiplicata
per l’inverso di una distanza, ovvero per un rapporto tra la superficie
che irradia e il volume in essa contenuto.
Allo stesso modo, nel considerare l’energia rilasciata o
assorbita da una reazione in una regione del nostro dominio
unidimensionale, dobbiamo tener conto delle effettive dimensioni
trasverse in m2 della scarica.
Per questi dati, come del resto per la temperatura da fissare
alle pareti, si è fatto riferimento ai reattori in [32] e [33], che sono del
tipo e della misura più frequentemente utilizzati per la produzione del
tipo di plasmi qui considerato e le cui misure nella direzione del
diametro degli elettrodi sono state impiegate in modelli bidimensionali
[34].
I reattori di cui sopra hanno elettrodi circolari aventi
diametro di 30 cm spaziati di 2 cm (ed è proprio lungo la direzione che
collega i due elettrodi che è sviluppata la nostra simulazione).
55
3.5.2 Conduttività
La conduttività termica dipende dalla temperatura secondo la
relazione [35] :
T n
J
k = k0
T0 m ⋅ s ⋅ °K
(3.12)
con k0 = 2.4476 × 10-2 J/m⋅s ⋅°K e n = 0.87.
Dato che il grado di ionizzazione e di dissociazione in questo
plasma è basso, si può assumere che le variazioni relativamente piccole
della composizione del gas mentre esso si trova nello stato di plasma
abbiano effetti trascurabili sulle proprietà di conduzione di calore del
gas.
56
CAPITOLO 4
DISCRETIZZAZIONE ED
IMPLEMENTAZIONE DELL’EQUAZIONE DEL
CALORE
4.1 Forma generale dell’equazione da discretizzare
La conduzione di calore stazionaria unidimensionale è governata
dalla equazione
d dT
k + S = 0
dx dx
(4.1)
dove k è la conduttività termica, T è la temperatura e S è il tasso
di generazione di calore per unità di volume .
Per discretizzare l’equazione si impiega la griglia di figura 4.1.
Figura 4.1 Agglomerato di punti griglia per il problema unidimensionale
Focalizziamo l’attenzione sul punto P, che ha come vicini i punti
E e W, rispettivamente nella direzione delle x crescenti e decrescenti.
Le linee tratteggiate indicano le facce del volume di controllo ,
denotati con e e w.
57
Per il problema unidimensionale che stiamo considerando si
assume spessore unitario nelle direzioni y e z. Quindi il volume di
controllo ha volume ∆x×1×1.
Integrando l’equazione 4.1 sul volume di controllo otteniamo
e
dT dT
k − k + ∫ Sdx = 0
dx e dx w w
(4.2)
Allo stato attuale si assegna ad ogni punto della griglia un valore
di temperatura che diventa il valore assunto in tutto il volume di
controllo.
Questa assegnazione restituisce un profilo a scala come in figura
4.2(a), per il quale la pendenza dT/dx non è definita ai lati del volume
di controllo . Un profilo che non soffre di questa limitazione è quello
lineare a tratti della figura 4.2(b) dove si è usata una interpolazione
lineare tra i punti di griglia .
Tuttavia una griglia abbastanza fitta da permettere stabilità in
problemi ben più complessi quale è la nostra può garantire la quasi
linearità del profilo di temperatura e possiamo quindi calcolare le
derivate nell’ equazione 4.2 ottenendo
k e (TE − TP ) k w (TP − TW )
−
+ S ∆x = 0
(δx ) e
(δ x ) w
(4.3)
dove S è il valore medio di S sul volume di controllo .
E’ utile riscrivere l’ equazione discretizzata nella forma :
aPTP = aETE + aWTW +b
(4.4)
58
dove
aE =
ke
,
(δx)e
aw =
kw
,
(δx) w
(4.5)
a P = a E + aW ,
b = S ∆x
Figura 4.1 Due semplici tipologie di profilo. (a) a scala; (b) lineare a tratti
4.2 Regole di base
A. Consistenza ai lati del volume di controllo
Il flusso attraverso una faccia comune a due volumi di controllo
deve essere rappresentato dalla stessa espressione nelle equazioni
discretizzate per i due volumi .
59
B. Coefficienti positivi
Il valore di una variabile dipendente in corrispondenza di un
punto di griglia è influenzato dai valori ai punti confinanti tramite il
processo di diffusione .
Ovviamente un aumento del valore ad un punto , in assenza di
altri cambiamenti , deve portare ad un aumento del valore al punto
confinante , ovvero i coefficienti a devono avere lo stesso segno , che
assumiamo positivo .
C. Somma dei coefficienti confinanti
Se l’ equazione 4.1 è soddisfatta da T essa deve essere anche
essere soddisfatta da T+c , con c costante arbitraria . Questa proprietà
dell’ equazione differenziale deve essere riflessa nell’ equazione
discretizzata , ovvero l’equazione 4.1 deve rimanere valida quando TP ,
TE e TW sono aumentati di una costante , da cui segue
aP=aE+aW
(4.6)
La nostra equazione ovviamente soddisfa questa regola , la
quale implica che TP è una media pesata dei valori confinanti .
Passiamo ora a vedere in dettaglio altri aspetti del
problema della conduzione del calore in una dimensione .
D. Spaziatura della griglia
Per i punti di griglia mostrati in figura 4.1 non è necessario che le
distanze (δx)e e (δx)w siano uguali , anzi a volte l’uso di una griglia
nonuniforme è indicato per risparmiare tempo di macchina . In generale
60
si otterrà una soluzione accurata solo quando la griglia è
sufficientemente fine , ovvero tanto piu fine quanto più è rapida la
variazione di T con x .
E. Conduttività all’ interfaccia
Nell’ equazione 4.3 ke e kw
rappresentano i valori della
conduttività sulle facce e e w sulle facce del volume di controllo .
Quando k è una funzione di x spesso conosciamo i valori di k in
corrispndenza dei punti di griglia W , P , E e così via .
Serve quindi un metodo per calcolare la conduttività all’
interfaccia , diciamo ke , in termini dei valori sui punti della griglia .
Ovviamente questa discussione è irrilevante quando la
conduttività è uniforme.
Disuniformità
nella
conduttività
possono
sorgere
dalla
disomogeneità del materiale, o, come nel nostro caso, dalla
distribuzione di temperatura.
La procedura più immediata per ottenere la conduttività ke all’
interfaccia è assumere una variazione lineare di k tra i punti P ed E :
k e = f e k p + (1 − f e )k E
(4.7)
dove il fattore di interpolazione fe è un rapporto definito in
termini delle distanze mostrate in figura 4.3 :
fe =
(δx) e+
(δx) e
(4.8)
61
Se l’ interfaccia e fosse esattamente a metà tra i punti di griglia ,
fe sarebbe 0.5 e ke sarebbe la media aritmetica di kP e kE .
Questo semplice approccio porta ad implicazioni scorrette e non
può affrontare correttamente gli improvvisi cambi di conduttività che si
verificano nei materiali composti .
Figura 4.3 Distanze associate all’interfaccia e
Nel ricercare un’ alternativa ricordiamo che non è il valore locale
della conduttività all’ interfaccia e che ci interessa direttamente . Il
nostro obiettivo principale è di ottenere una buona rappresentazione del
flusso di calore qe all’ interfaccia tramite
qe =
k e (TP − TE )
(δx) e
(4.9)
che è stata usata per ottenere l’ equazione discretizzata .
L’ espressione cercata per ke è quella che porta ad un qe
“corretto” .
Immaginiamo che il volume di controllo che circonda il punto P
sia riempito con un materiale di conduttività uniforme kP e quello
intorno ad E con un materiale di conduttività kE . Per la “fetta” di
62
materiale compresa tra i punti P ed E , una analisi stazionaria
unidimensionale (senza sorgenti ) porta a
qe =
TP − TE
(δx) e − / k P + (δx) e + / k E
(4.10)
La combinazione delle equazioni 4.8 e 4.10 dà
1 − f
−1
f
e
k e =
+ e
kE
kP
(4.11)
Quando l’ interfaccia è posta a metà tra P ed E si ottiene fe = 0.5 ,
ovvero
ke =
2k P k E
kP + kE
(4.12)
L’ equazione 4.12 mostra che ke è la media armonica di kP e kE
piuttosto che quella aritmetica che darebbe la 4.7 quando fe = 0.5 .
L’ uso dell eq. 4.11 nelle definizioni dei coefficienti 4.5 porta
alla seguente espressione per aE :
−1
(δx)
δ
x)
( e+
e−
+
aE =
k P
k E
(4.13)
Una espressione analoga sarà scritta per aW . Ovviamente aE
rappresenta la conduttanza del materiale tra i punti P ed E .
63
La validità di questa formulazione è confermata dai sue seguenti
casi limite :
1. Sia kE→0 . Quindi dall’equazione 4.11 ,
ke→ 0.
(4.14)
Questo implica che il flusso di calore attraverso una faccia di un
isolante diventa zero, come dovrebbe, laddove invece la formulazione
basata sulla media aritmetica avrebbe dato un flusso non nullo .
Sia kP>>kE . Quindi :
ke →
kE
fe
4.15)
Questo risultato ha due implicazioni; la prima più immediata, la
seconda più sottile. L’ equazione 4.15 indica che la conduttività
all’interfaccia ke non dipende affatto da kP . Ciò è prevedibile dato che
il materiale ad alta conduttività attorno al punto P offre una resistenza
trascurabile rispetto a quella offerta dal materiale attorno ad E la
formulazione basata sulla media aritmetica avrebbe trattenuto l’ effetto
di kP su kE ) .
L’altra implicazione è che ke non è uguale a kE , bensì il loro
rapporto è 1/fe .
Il nostro scopo è di ottenere un valore corretto di qe tramite l’ eq.
4.9 . L’uso dell’eq. 4.15 dà
64
qe =
k E (TP − TE )
(δx) e +
(4.16)
Quando kP>>kE , la temperatura TP prevarrà fino all’ interfaccia
e , e la caduta di temperatura TP – TE avrà luogo lungo (δ x)e+ . Perciò il
valore corretto del flusso sarà quello dato dall’ eq. 4.16 . In altre parole
il fattore fe nell’eq. 4.15 compensa l’ uso della distanza nominale (δ x)e
nell’ eq. 4.9 .
La considerazione di questi due casi limite mostra che la
formulazione può far fronte a repentini cambi di conduttività senza
richiedere una griglia eccessivamente fine in prossimità della
discontinuità .
La formula 4.11 per la conduttività all’ interfaccia è basata sulla
situazione unidimensionale stazionaria senza termine sorgente in cui la
conduttività varia secondo un profilo a gradini da un volume di
controllo ad un altro .
Ma anche in situazioni come la nostra con sorgente non nulla e
con variazione continua di conduttività questa formula approssima
molto meglio il reale comportamento [36].
4.3 Nonlinearità
L’ equazione di discretizzazione 4.4 è un’equazione algebrica
lineare, risolvibile con i metodi appositi per tali equazioni . Tuttavia nel
problema della conduzione del calore si incontrano spesso situazioni in
cui si perde la linearità.
Questo accade ad esempio quando k dipende da T , come nel
presente caso, o quando la sorgente S è una funzione nonlineare di T .
65
In questi casi i coefficienti nella equazione di discretizzazione
dipenderanno essi stessi da T . In queste situazioni la procedura da
adottare è quella dell’ iterazione , che consiste dei seguenti passi :
1. Si parte da una stima o da un valore a caso per i valori di T in
corrispondenza di tutti i punti di griglia .
2. Da questi valori di T si calcolano dei valori di prova dei coefficienti
nell’ equazione di discretizzazione .
3. Si risolve l’ insieme , nominalmente lineare , di equazioni
algebriche per ottenere nuovi valori di T .
4. Con questi nuovi valori di T come stime migliori si ritorna al passo
2 e si ripete il processo fino a che successive iterazioni cessano di
ptodurre variazioni significative nei valori di T.
Lo stato finale senza variazioni è chiamato convergenza delle
iterazioni. *
La soluzione convergente è proprio la soluzione corretta delle
equazioni nonlineari , anche se ci si è arrivati risolvendo equazioni
lineari .
E’ in ogni caso possibile che successive iterazioni non
convergano mai ad una soluzione . I valori di T possono allontanarsi
sempre più o oscillare con ampiezza crescente . Questo processo è
detto divergenza , e un buon metodo numerico deve minimizzare le
possibilità che esso si verifichi. Di certo il rispetto delle tre regole
derivate in precedenza è un buon passo verso la convergenza .
*
Alle volte il termine convergenza è usato per indicare il processo in seguito al quale successive
regolazioni della griglia portano la soluzione numerica più vicina alla soluzione esatta . Questo
aspetto sarà chiamato in questo lavoro ‘accuratezza’ della soluzione numerica , riservando la parola
convergenza allo stato finale delle iterazioni qui descritte.
66
4.4 Condizioni al contorno
Assumiamo che , nel nostro problema unidimensionale sia stata
scelta la serie di punti di griglia mostrata in figura 4.4. C’è un punto di
griglia su ciascuno dei due confini . Gli altri punti sono detti punti
interni , attorno a ciascuno dei quali è mostrato un volume di controllo .
Per ognuno di questi volumi di controllo può essere scritta una
equazione discretizzata come la 4.4. Se consideriamo l’ equazione 4.4
come una equazione per TP, abbiamo le equazioni necessarie per tutte
le temperature incognite in corrispondenza dei punti di griglia interni .
Due di queste però contengono le temperature dei punti di griglia sui
contorni . Attraverso il trattamento di queste temperature al contorno si
introduconi le condizioni al contorno nello schema della soluzione
numerica.
Poniamo l’ attenzione sul punto B sul confine sinistro , che è
adiacente al primo punto interno I , come mostrato in figura.
Figura 4.4 Volumi di controllo per i punti interni e per il contorno
In genere si incontrano tre tipi di condizioni al contorno nei
problemi di conduzione del calore . Essi sono :
67
1. Data temperatura sul contorno
2. Dato flusso di calore in corrispondenza del contorno
3. Flusso di calore in corrispondenza del contorno specificato da un
coefficiente di trasmissione del calore e dalla temperatura del fluido
circostante
Se è data la temperatura del contorno ( ovvero si conosce il
valore di TB) , non ci sono particolari difficoltà e non sono richieste
ulteriori equazioni .
Quando non è specificata la temperatura al contorno bisogna
costruire una equazione supplementare per TB integrando l’equazione
differenziale sul ‘mezzo’ volume di controllo adiacente al contorno
(fig.4.5) .
Figura 4.5 Mezzo volume di controllo adiacente al contorno
Si ottiene
q B − qi + S∆x = 0
(4.17)
dove il flusso di calore q sta per –k dT/dx .
Il flusso all’ interfaccia qi può essere scritto come si è fatto
nell’equazione 4.9 . Il risultato è :
68
qB −
k i (TB − TI )
+ S∆x = 0
(δx) i
(4.18)
Una ulteriore implementazione di questa equazione dipende da
quanto è dato circa il flusso di calore al contorno qB . Se il suo valore è
dato, l’ equazione per TB diventa
a B TB = a I TI + b
(4.19)
dove
aI =
ki
,
(δx ) i
b = S∆x + q B ,
(4.20)
aB = aI
Se il flusso di calore qB è specificato in termini di un coefficiente
di trasmissione di calore h e una temperatura del fluido circostante Tf
tale che
q B = h(T f − TB ),
(4.21)
l’ equazione per TB diventa
a BTB = a I TI + b,
(4.22)
69
dove
aI =
ki
,
x
δ
( )i
b = S∆x + hT f ,
(4.23)
aB = aI + h
70
4.5 Risoluzione delle equazioni algebriche
I metodi per risolvere le equazioni algebriche si dividono in
diretti o iterativi .
Il più semplice dei metodi diretti è il metodo TDMA
(TriDiagonal Matrix Algorithm), cosiddetto perchè scrivendo la
matrice dei coefficienti delle equazioni , tutti i valori diversi da zero si
allineano su tre diagonali della matrice *.
Questo metodo usa una relazione di ricorrenza che permette di
risolvere le equazioni dall’ultima alla prima .
I metodi diretti sono accettabili nella risoluzione di equazioni
lineari , ma quando le equazioni vanno risolte ripetutamente con
coefficienti aggiornati essi portano ad un elevato spreco di tempo e di
memoria della macchina . Inoltre diventano eccessivamente complicati
e dispendiosi passando a più dimensioni .
L’alternativa è data dai metodi iterativi , che richiedono molta
meno memoria e sono particolarmente indicati nel trattare la
nonlinearità . Infatti in un problema non lineare non è necessario nè
saggio portare la soluzione delle equazioni algebriche alla convergenza
finale per un insieme di valori fissi per i coefficienti . Una volta scelto
un primo insieme di questi valori , bastano poche iterazioni
dell’algoritmo risolvente prima che venga effettuato l’aggiornamento
dei coefficienti . In generale ci vuole un certo equilibrio tra lo sforzo
richiesto per calcolare i coefficienti e quello richiesto per risolvere le
equazioni . Non è certo sensato spendere troppo nel risolvere equazioni
basate su coefficienti che sono solo un tentativo .
La base di tutti i metodi iterativi è il metodo di Gauss-Seidel in
cui i valori della variabile sono calcolati visitando in un dato ordine
*
Ciò avviene perchè ci si riferisce ai valori nel punto in interesse e nei suoi due punti adiacenti
71
tutti i punti della griglia [37]. Nella memoria del calcolatore rimane
solo un insieme di valori di T per volta . All’inizio questi rappresentano
la stima iniziale o i valori che vengono dalla precedente iterazione .
Man mano che si arriva su ogni punto della griglia , il corrispondente
valore di T nella memoria della macchina è variato in questo modo :
- se l’equazione discretizzata è scritta
aPTP = aETE + aW TW + b
(4.24)
il valore di T al punto P sarà dato da :
aETE* + aW TW* + b
TP =
aP
(4.25)
dove T*E,B sono i valori in corrispondenza dei punti limitrofi
immagazzinati nella memoria . Per punti vicini che sono già stati
visitati nell’iterazione corrente , T* è il valore appena calcolato , per
punti vicini che devono ancora essere visitati , T* è il valore che viene
dalla iterazione precedente . Quando tutti i punti sono stati visitati in
questo modo , è stata completata una iterazione del metodo di GaussSeidel .
Per illustrare il metodo , consideriamo due semplici esempi .
Equazioni :
T1 = 0.4T2 + 0.2
(4.26)
T2 = T1 + 1.
72
Soluzione :
Iterazione n.
0
1
2
3
4
T1
0
0.2
0.68
0.872
T2
0
1.2
1.68
1.872
5
...
∞
0.949 0.980
...
1.0
1.949 1.980
...
2.0
Si può vedere che , partendo con un valore arbitrario ci si è potuti
avvicinare all’esatta soluzione delle equazioni . Un aspetto interessante
dei metodi iterativi è che la precisione dei calcoli non deve essere
necessariamente elevata nei passaggi intermedi . I calcoli approssimati ,
e anche gli errori , tendono a essere eliminati , dato che i valori
intermedi sono usati semplicemente come stime per la successiva
iterazione . Ricaviamo ulteriori informazioni dal seguente esempio .
Equazioni :
T1 = T2 − 1,
(4.27)
T2 = 2.5T1 − 0.5
Soluzione :
Iterazione n.
0
1
2
3
4
T1
0
-1
-4
-11.5
-30.25
T2
0
-3
-10.5
-29.25
-76.13
Non sembra che ci siano molte speranze . Qui il processo di
iterazione è andato incontro a divergenza .
73
Dopotutto le equazioni 4.27 altro non sono che versioni
riarrangiate delle equazioni 4.26, per le quali si era ottenuta la
convergenza , che quindi non è sempre garantita dal metodo di GaussSeidel .
Scarborough ha formulato un criterio che, se soddisfatto, assicura
la convergenza .
Criterio di Scarborough . Una condizione sufficiente per la
convergenza del metodo di Gauss-Seidel è
∑ av
aP
≤1
(4.28)
per tutte le equazioni tranne almeno una per cui l’uguaglianza
deve valere in senso stretto , con av che rappresenta il coefficiente di T
per i punti vicini , in questo caso E e W .
Commenti :
1. Il criterio è una condizione sufficiente , non necessaria . Ovvero può
essere talvolta violato ottenendo comunque la convergenza.
2. Alcune delle regole base, che sono state motivate da considerazioni
fisiche, soddisfano le richieste del criterio di Scarborough . Ad
esempio se uno dei coefficienti fosse negativo, aP , che nel nostro
caso è uguale a Σav , avrebbe un modulo minore di Σ|av|, portando
ad una violazione del criterio.
3. Quando, come nel nostro caso, aP = Σav, e tutti i coefficienti sono
positivi, otteniamo, per tutte le equazioni, Σ|av|/|aP| = 1 . In che caso,
74
quindi, il rapporto è minore dell’unità? La risposta è nelle
condizioni al contorno. Affinchè il problema abbia una determinata
soluzione, la temperatura deve essere specificata per almeno un
punto sul contorno. L’equazione discretizzata in cui questo punto
appare come uno dei punti vicini implica Σ|av|/|aP|<1. Questo perchè
Σ|av| va calcolato come somma dei coefficienti dei vicini incogniti;
d’altro canto aP è la somma di tutti i coefficienti dei punti confinanti
incluso quello del punto sul contorno.
4.6 Sovrarilassamento e sottorilassamento
Nella soluzione iterativa delle equazioni algebriche o nello
schema iterativo usato per trattare la nonlinearità è spesso conveniente ,
anche alla luce di quanto si è detto sull’equilibrio tra sforzi per
calcolare i coefficienti e sforzi per calcolare i valori di T , accelerare o
rallentare i cambiamenti dei valori della variabile dipendente da una
iterazione all’altra . Questo processo è detto sovrarilassamento o
sottorilassamento a seconda che le variazioni siano accelerate o
rallentate . Il sovrarilassamento è spesso usato in coppia con il metodo
di Gauss-Seidel prendendo il nome di SOR (Successive OverRelaxation) . Il sottorilassamento è uno strumento molto utile per
problemi non lineari [38] .
Vediamo come viene modificata la nostra equazione . Si parte da
TP =
aETE + aW TW + b
aP
(4.29)
75
Sommando e sottraendo il valore TP* (che come si è detto
rappresenta il valore di TP proveniente dalla precedente iterazione) dal
secondo membro si ottiene :
a T +a T +b
*
E
E
W
W
− TP
TP = T +
aP
*
P
(4.30)
dove il contenuto della parentesi è proprio la variazione di TP
prodotta dall’iterazione corrente . Questa variazione può essere
modificata introducendo un fattore di rilassamento α , ovvero
a T +a T +b
*
E E
W W
TP = T + α
− TP
aP
*
P
(4.31a)
cioè
aP
a
TP = a E TE + aW TW + b + (1 − α ) P TP*
α
α
(4.31b)
Notiamo in primo luogo che quando le iterazioni convergono,
ovvero TP diventa uguale a TP*, la 4.31a implica che i valori di T
soddisfano l’equazione originale 4.29 .
Questa è una proprietà che ogni schema di rilassamento deve
possedere; la soluzione finale deve soddisfare l’equazione di
discretizzazione comunque si sia arrivati alla convergenza .
76
Quando il fattore di rilassamento α è compreso tra 0 e 1 il suo
effetto è il sottorilassamento , ovvero i valori di TP sono più vicini a TP*
. Quando α è maggiore di 1 si ha sovrarilassamento . Non vi sono
regole generali per la scelta del migliore valore di α . In questo caso si
è scelto il sottorilassamento trattandosi di un caso di nonlinearità , e si è
posto α uguale a 0.8 .
4.7 Forma finale dell’ equazione discretizzata
Partiamo dall’equazione 4.4 . Combinando la 4.5 con la 4.12 si
ottiene :
aP =
k(TP )k(TW )
2 k(TP )k(TE )
+
∆x k(TP ) + k(TE ) k(TP ) + k(TW )
aW =
2 k(TP )k(TW )
∆x k(TP ) + k(TW )
aE =
(4.32)
2 k(TP )k(TE )
∆x k(TP ) + k(TE )
e la forma finale dell’equazione discretizzata è quindi :
77
k(TP )k(TW ) TP
2 k(TP )k(TE )
+
=
∆ x k(TP ) + k(TE ) k(TP ) + k(TW ) α
=
2 k(TP )k(TW )
T +
∆ x k(TP ) + k(TW ) W
+
2 k(TP )k(TE )
T + SP ∆ x +
∆x k(TP ) + k(TE ) E
k(TP )k(TW ) *
(1 − α ) 2 k(TP )k(TE )
+
+
T
α ∆x k(TP ) + k(TE ) k(TP ) + k(TW ) P
78
(4.33)
CAPITOLO 5
RISULTATI
La simulazione è stata condotta utilizzando due versioni
differenti del programma: una in cui la temperatura del gas era fissata
pari a 300 ºK e una in cui è stata inserita l’equazione del calore
discretizzata, che conduce ad un profilo non costante di temperatura.
Parte di questo capitolo sarà dedicata alle differenze riscontrate
confrontando i risultati ottenuti, laddove queste ultime sono più
significative.
Inoltre saranno discussi aspetti relativi alle scariche a
radiofrequenza in ossigeno evidenziati da entrambi i programmi.
Sono stati simulati circa 1900 cicli RF, sufficienti a raggiungere
la stabilità, condizione quest’ultima assicurata dal fatto che il numero
di particelle simulate non varia che in minima parte all’aumentare dei
passi di calcolo.
Si passano adesso in rassegna i diversi parametri di plasma.
5.1 Temperatura
La temperatura che si ottiene quando l’energia depositata o
assorbita a seguito delle varie reazioni e collisioni viene inserita come
sorgente nell’equazione allo stato stazionario per la diffusione del
calore mostra il profilo riportato in figura 5.1. L’analisi di Fourier
assicura che la forma del profilo di temperatura è la stessa del profilo
del termine sorgente. Si evince che la maggior parte dell’energia viene
depositata al centro del glow, e questo viene spiegato da una analisi
comparata dei profili di densità e di temperatura delle varie specie che
mostra che per quanto gli ioni abbiano maggiore energia in
79
corrispondenza degli sheath, la loro densità, così come quella degli
elettroni, è molto maggiore al centro. A tale proposito si veda in
seguito il paragrafo dedicato all’energia depositata dalle diverse
reazioni.
Con le pareti del reattore fisse a 300 ºK , i risultati ottenuti
Temperatura del gas (Kelvin)
sono in perfetto accordo con quelli misurati sperimentalmente [33].
2
5,0 10
2
4,5 10
2
4,0 10
2
3,5 10
2
3,0 10
2
2,5 10
0
0 10
5 10
-3
1 10
-2
2 10
-2
2 10
-2
posizione (m)
Figura 5.1 Temperatura del gas
5.2 Potenziale
L’andamento del potenziale medio è mostrato in figura
5.2. Esso è stato ottenuto mediando tutti i valori del potenziale calcolati
dal PIC ad ogni ciclo. Il profilo è simmetrico in accordo con la
geometria del reattore qui simulato.
80
In corrispondenza degli elettrodi il potenziale medio è
chiaramente nullo. A causa della maggiore velocità degli elettroni, che
diffondono più rapidamente verso le pareti, il plasma al centro del glow
si ritrova con una prevalenza di carica positiva e quindi con un
potenziale medio più elevato rispetto agli elettrodi. Peraltro,
considerando la velocità con cui le cariche positive e negative arrivano
agli elettrodi, si ha un flusso di carica netto pari a zero.
Il potenziale di plasma Vp si assesta ad un valore pari a
circa 0.4 VRF, in accordo con la teoria[39].
Potenziale
potenziale medio (V)
100
80
60
40
20
0
0
0 10
1 10
-2
posizione (m)
Figura 5.2 Potenziale medio in funzione dalla posizione
81
2 10
-2
5.3 Densità
In figura 5.3 è riportata la densità degli elettroni.
L’avvallamento al centro è dovuto all’inerzia degli ioni negativi al
centro del plasma, per cui gli elettroni “vedono” una maggiore carica
negativa al centro e non vi si posizionano per assicurare la neutralità
[40].
Il numero di elettroni si riduce drasticamente in
corrispondenza degli elettrodi a causa della diffusione ambipolare e
della formazione dello sheath.
Per quanto riguarda lo studio a due diverse temperature, si
vede che il numero di elettroni al centro della scarica è circa del 20%
maggiore nel caso di temperatura variabile, quindi laddove il profilo di
temperatura raggiunge il massimo, mentre la densità si mantiene
costante nelle regioni di diffusione. Ci sono due processi principali che
conseguono all’aumento di temperatura, e che producono effetti
contrastanti: da un lato ad una temperatura maggiore corrisponde una
maggiore diffusione, e questo porterebbe ad una diminuzione del
numero di elettroni nel centro del plasma; d’altra parte con la
temperatura cresce anche il numero di collisioni, che portano ad un
intrappolamento degli elettroni nella regione ambipolare. Nel caso in
analisi prevale quest’ultimo effetto.
82
densità elettroni
14
-3
elettroni (m
)
10
10
T variabile
T costante
13
0
0,0 10
-3
-2
5,0 10
1,0 10
-2
1,5 10
-2
2,0 10
posizione (m)
Figura 5.3 Densità elettronica a due temperature
Le figure da 5.4 a 5.7 mostrano la densità degli ioni.
Anche in questo caso la densità è maggiore al centro, in quanto gli ioni
vengono prodotti in primo luogo per impatto elettronico. L’effetto della
temperatura è pressochè ininfluente sugli ioni negativi, mentre porta ad
una diversa densità gli ioni positivi, in particolare gli O+ nei pressi
degli sheath. Questi fenomeni trovano spiegazione nelle seguenti
considerazioni:
- gli ioni O2- sono prodotti per dissociazione dell’O3 o per scambio di
carica tra O- e O2: l’ozono è una specie relativamente pesante e
quindi poco mobile; gli ioni negativi, dopo essere stati prodotti,
vengono sospinti verso il centro del plasma dal campo ambipolare .
Da questo segue che gli ioni negativi vengono poco influenzati dalle
variazioni di temperatura.
- gli ioni positivi sono invece maggiormente accelerati verso gli
elettrodi, in seguito agli effetti cooperativi del campo ambipolare e
83
della maggiore velocità termica. Gli ioni O+, più leggeri degli O2+ si
perdono con maggiore velocità.
densità ioni O2
+
T costante
10
15
2
+
-3
ioni O (m )
T variabile
14
10
0
0,0 10
-3
-2
5,0 10
-2
1,0 10
1,5 10
-2
2,0 10
posizione (m)
Figura 5.4 Densità degli ioni O2+
densità ioni O
10
14
-
-3
ioni O(m )
10
-
15
10
10
13
T costante
T variabile
12
11
10
0
0,0 10
-3
-2
5,0 10
1,0 10
posizione (m)
84
-2
1,5 10
-2
2,0 10
densità ioni O+
10
-3
ioni O(m )
10
12
11
+
10
13
10
10
10
9
T variabile
T costante
8
10
0
0,0 10
-3
-2
5,0 10
-2
1,0 10
1,5 10
-2
2,0 10
posizione (m)
Figura 5.5 Densità degli ioni O+
10
-
14
2
-
-3
ioni O (m )
10
densità ioni O2
15
10
10
13
T costante
T variabile
12
11
10
0
0,0 10
-3
5,0 10
-2
1,0 10
posizione (m)
Figura 5.6 Densità degli ioni O2-
85
-2
1,5 10
-2
2,0 10
densità ioni O
10
10
12
11
+
-3
ioni O(m )
10
+
13
10
10
10
9
T variabile
T costante
8
10
0
0,0 10
-3
-2
5,0 10
1,0 10
-2
1,5 10
-2
2,0 10
posizione (m)
Figura 5.7 Densità degli ioni O+
5.4 Energia media
Le figure da 5.8 a 5.10 riportano l’energia media delle tre
specie più rappresentate nella presente simulazione: elettroni, ioni O2+ e
ioni O-.
Osservando l'energia cinetica media delle particelle,
notiamo ancora come la fenomenologia sperimentale viene riprodotta
da principi primi: gli elettroni hanno energia media dell'ordine dell'eV
nel centro della scarica, dove gli ioni sono invece ad energie termiche.
Questo accade perché gli elettroni, molto leggeri, traggono energia dal
forte campo elettrico nella regione dello sheath e la trasportano per
diffusine nel centro della scarica. Si ha quindi un regime di
riscaldamento non locale, a differenza di quanto avviene nelle scariche
86
ad elevata pressione (in cui la diffusione è poco importante) dove
l'energia media degli elettroni è determinata dal campo elettrico locale.
Gli ioni, molto più pesanti, si muovono più lentamente e sono
caratterizzati da più bassi coefficienti di diffusione per cui il trasporto
di energia nel bulk è molto meno importante. Inoltre gli ioni
trasferiscono molta energia negli urti elastici con le altre particelle
pesanti, a differenza di quanto accade per gli elettroni. Questo spiega
perché nel bulk gli ioni abbiano energie termiche.
Nelle regioni periferiche si ha una moderata diminuzione
dell'energia elettronica ed un vistosissimo aumento dell'energia degli
ioni positivi, che vengono accelerati verso gli elettrodi dal campo di
sheath ed ivi raggiungono la massima energia.
energia degli elettroni
1
3,0 10
1
energia (eV)
2,5 10
1
2,0 10
1
1,5 10
1
1,0 10
T variabile
T costante
0
5,0 10
0
0,0 10
0
0,0 10
-3
-2
5,0 10
1,0 10
-2
1,5 10
-2
2,0 10
posizione (m)
Figura 5.8 Energia media degli elettroni
Per quanto detto in precedenza, gli elettroni acquistano maggiore
energia cinetica lungo tutta la scarica a causa della aumentata
temperatura.
87
energia degli ioni O-
energia (eV)
10
10
10
2
1
0
T variabile
T costante
-1
10
0
0,0 10
-3
5,0 10
-2
-2
1,0 10
1,5 10
-2
2,0 10
posizione (m)
Figura 5.9 Energia media degli ioni O2+
energia (eV)
10
10
10
10
energia ioni O2
2
+
T variabile
T costante
1
0
-1
-2
10
0
0,0 10
-3
-2
5,0 10
1,0 10
-2
1,5 10
-2
2,0 10
posizione (m)
Figura 5.10 Energia media degli ioni O-
Gli ioni O2+ sono poco influenzati dall’aumento di temperatura,
al contrario di quanto avviene per gli ioni O- nei pressi degli sheath.
Questo aumento di energia cinetica può indicare un abbassamento della
88
buca di diffusione ambipolare, al quale bordo peraltro gli ioni arrivano
con velocità maggiore in quanto trovano un gas maggiormente rarefatto
in seguito alla temperatura più elevata.
5.5 Velocità di deriva
I grafici della velocità di deriva, da figura 5.11 a figura 5.15,
mostrano chiaramente che la scarica a piatti paralleli in esame opera in
regime di diffusione ambipolare, in cui il movimento degli elettroni è
condizionato da quello degli ioni che, essendo più pesanti, diffondono
più lentamente. Infatti ioni ed elettroni hanno ovunque velocità di
deriva con lo stesso segno, contrariamente a quanto avverrebbe se
avessimo invece un trasporto convettivo dominato dall'energia locale.
velocità degli elettroni
5
6,0 10
5
velocità (m/s)
4,0 10
T variabile
T costante
5
2,0 10
0
0,0 10
-2,0 10
-4,0 10
5
5
5
-6,0 10
0
0,0 10
-3
-2
5,0 10
1,0 10
-2
1,5 10
-2
2,0 10
posizione (m)
Figura 5.11 Velocità di deriva degli elettroni
Guardando il grafico della velocità degli elettroni, si nota che
questi ultimi non sono accelerati dall’aumento di temperatura, in
89
accordo con quanto si era detto a proposito della densità, ovvero che la
diffusione è fortemente limitata dalle collisioni.
velocità ioni O2
4
+
4,0 10
4
T variabile
T costante
velocità (m/s)
3,0 10
4
2,0 10
4
1,0 10
0
0,0 10
-1,0 10
-2,0 10
-3,0 10
4
4
4
4
-4,0 10
0
0,0 10
-3
-2
5,0 10
-2
1,0 10
-2
1,5 10
2,0 10
posizione (m)
Figura 5.12 Velocità di deriva degli ioni O2+ lungo tutta la scarica
velocità ioni O2
2
+
4,0 10
2
velocità (m/s)
3,0 10
T variabile
T costante
2
2,0 10
2
1,0 10
0
0,0 10
-1,0 10
-2,0 10
-3,0 10
-4,0 10
2
2
2
2
-3
6,0 10
-3
-2
8,0 10
1,0 10
-2
1,2 10
-2
1,4 10
posizione (m)
Figura 5.13 Velocità di deriva degli ioni O2+ in prossimità del centro della
scarica
90
Dalla figura 5.12 si evince che gli ioni O2+, pur entrando
nello sheath con una energia maggiore quando la temperatura è più
elevata, non raggiungono velocità maggiori rispetto al caso di
temperatura costante, ma sono addirittura rallentati dalle collisioni.
La figura 5.13 mostra l’andamento della velocità
all’interno del bulk. È interessante notare come nel caso di temperatura
variabile siano evidenziati dei cambi di segno della derivata. Questo
fenomeno evidenzia l’esistenza di un doppio strato di carica dovuto al
richiamo
di
cariche
negative
conseguente
all’espansione
e
restringimento dello sheath. Gli ioni negativi pesanti vengono
richiamati più lentamente degli elettroni, andando così a formare un
secondo sheath.
Per quanto riguarda gli ioni O-, essi vengono accelerati
molto di più all’aumentare della temperatura, come mostra la figura
5.14. In questo caso, oltre alla minore massa rispetto agli ioni O2+, le
collisioni e le ricombinazioni sono molto meno presenti.
velocità ioni O
-
6
3,0 10
6
velocità (m/s)
2,0 10
T variabile
T costante
6
1,0 10
0
0,0 10
-1,0 10
6
6
-2,0 10
0
0,0 10
-3
-2
5,0 10
1,0 10
posizione (m)
Figura 5.14 Velocità di deriva degli ioni O-
91
-2
1,5 10
-2
2,0 10
velocità ioni O
-
4
3,0 10
T costante
4
velocità (m/s)
2,0 10
4
1,0 10
0
0,0 10
-1,0 10
-2,0 10
4
4
4
-3,0 10
0
0,0 10
-3
-2
5,0 10
1,0 10
-2
1,5 10
-2
2,0 10
posizione (m)
Figura 5.15 Velocità di deriva degli ioni O- a temperatura costante
Per maggiore chiarezza la figura 5.15 mostra l’andamento della
velocità degli ioni O- a temperatura costante, che non era ben
evidenziato nella figura precedente a causa della diversa scala.
92
5.5 Densità, energia e velocità in un ciclo RF
I parametri di plasma sopra riportati si riferiscono a medie
su valori campionati per un periodo di tempo corrispondente a diversi
cicli di radiofrequenza. È interessante vedere come questi parametri
variano all’interno di un singolo ciclo.
posizione (cm)
2.00
1e+11
2.16e+14 (log)
elettroni per m3
1.50
1.00
0.50
0.00
0.00
0.20
0.40
0.60
0.80
1.00
cicli rf
Figura 5.16 Variazione della densità degli elettroni in un ciclo RF
Come è evidente dalla figura, gli elettroni rispondono
istantaneamente al campo applicato, e penetrano completamente in
ognuno dei due sheath una volta per ogni ciclo.
Gli ioni invece mantengono una densità costante. La figura
5.17 conferma questa previsione per gli ioni O2+ (analoga situazione si
ha per gli altri ioni).
posizione (cm)
2.00
8.88e+13
1.33e+15 (log)
ioni o2+ per m3
1.50
1.00
0.50
0.00
0.00
0.20
0.40
0.60
cicli rf
Figura 5.17 Densità degli ioni O2+ in un ciclo RF
93
0.80
1.00
Analogo andamento ci si aspetta dall’energia e dalla
velocità, ovvero le informazioni interessanti provengono soltanto dallo
studio di questi parametri negli elettroni.
posizione (cm)
2.00
1
15 (log)
energia elettroni (eV)
1.50
1.00
0.50
0.00
0.00
0.20
0.40
0.60
0.80
1.00
cicli rf
posizione (cm)
cicli rf
Figura 5.18 Energia degli elettroni in un ciclo RF
posizione (cm)
2.00
-5e+05
5e+05
velocità degli elettroni
1.50
1.00
0.50
0.00
0.00
0.20
0.40
0.60
cicli rf
Figura 5.19 Velocità degli elettroni in un ciclo RF
94
0.80
1.00
5.6 Funzione di distribuzione dell’energia degli elettroni (EEDF)
Come detto in precedenza, ci si aspetta in questo tipo di
plasma una eedf non maxwelliana. Questo perché durante la
contrazione dello sheath e il conseguente avanzamento del fronte
elettronico, vengono prodotti degli elettroni “caldi” ad alta velocità. La
eedf dovuta a questi elettroni si combina con quella degli elettroni
“freddi”, portando ad un cambiamneto di pendenza nella funzione di
distribuzione.
La figura 5.20 riporta la eedf in diverse posizioni.
eedf
-1
10
-2
10
-3
x=
x=
x=
x=
eedf (eV
-3/2
)
10
0
0,0 10
1
1,0 10
0.12 cm
0.36 cm
0.6cm
0.84 cm
1
2,0 10
energia (eV)
Figura 5.20 eedf in diverse posizioni
Si evince dalla figura che la eedf, per quanto non maxwelliana,
non mostra una elevata differenza tra le due temperature, e questa
differenza tende a diminuire allontanandosi dallo sheath, dove gli
95
elettroni sono più energetici e le due temperature si equilibrano
maggiormente.
Si nota una competizione fra fenomeni di collisione
inelastica, che tendono a fare abbassare la cosiddetta "coda" della
distribuzione ad alta energia, ed il processo di scambio di energia tra
elettroni e campo di sheath, che produce un innalzamento della coda.
Tra i processi di collisione, quelli inelastici sono
naturalmente più efficaci poiché sottraggono all'elettrone gran parte
della sua energia. La diversità delle sezioni d'urto dei processi e la
disomogeneità del campo elettrico nella scarica RF generano la
ricchezza di comportamenti osservabile nelle figure.
Spostandosi dagli sheath verso il bulk si nota un
innalzamento della coda della eedf, ovvero il numero di collisioni
inelastiche che subiscono gli elettroni è minore mentre tende a
prevalere lo scambio di energia.
energia(eV)
40
1e-05
0.3 (log)
eedf (eV -3/2)
30
20
10
0
0.00
0.20
0.40
0.60
0.80
1.00
cicli rf
Figura 5.21 EEDF in un ciclo RF
Nel corso di un ciclo RF si nota una lieve modulazione
della eedf per alti valori di energia, corrispondente agli elettroni “caldi”
prodotti nelle ondulazioni dello sheath.
96
5.7 Funzione di distribuzione di energia degli ioni (IEDF)
Il modello del trasporto degli ioni positivi attraverso gli
sheats è basato su tre assunzioni fondamentali, che sono verificate in
questa simulazione:
- la densità ionica ni nello sheath è costante nel tempo;
- gli elettroni hanno mobilità infinita: reagiscono istantaneamente al
campo elettrico oscillante;
- il processo dominante tra ione e neutra nello sheath è lo scambio di
carica.
Le prime due assunzioni sono giustificate dal fatto che la
frequenza rf usata in questa simulazione è alta rispetto alla frequenza di
plasma degli ioni ωp+ ma è bassa rispetto alla frequenza di plasma degli
elettroni ωp-. Accade quindi che la densità degli ioni è determinata da
potenziali mediati nel tempo mentre gli elettroni seguono all’istante
l’alternare del potenziale (fig. 5.16).
Per quanto riguarda lo scambio di carica, da un’analisi
della sezione d’urto e dell’energia degli ioni si vede che anche a
pressioni relativamente basse (100 mTorr) e temperatura inferiore ai
500 °K il libero cammino medio è dell’ordine del millimetro, ovvero il
processo è molto probabile.
In seguito alla modulazione del potenziale nello sheath gli
elettroni dal plasma penetrano periodicamente nello sheath e
compensano il flusso di ioni positivi sul catodo. Sia xe(t) la posizione
del fronte di elettroni. Per l’infinita mobilità degli elettroni, il campo
elettrico E(x) è zero per x≤xe e il potenziale V(x) è uguale al potenziale
di plasma. Per x>xe
la densità elettronica ne(x) va a zero e la
distribuzione del potenziale è determinata dall’equazione di Poisson,
97
d 2V
e
ni ( x)
=
−
dx 2
ε0
.
(5.1)
I processi di scambio di carica portano alla creazione di ioni
termici nello sheath lasciando invariato il flusso ionico totale. Se uno
ione viene creato da un processo di scambio di carica nella posizione
S0, raggiungerà il catodo con una probabilità exp[-α(1-S0)] dove α
=d/λ è il rapporto tra lo spessore dello sheath ed il libero cammino
medio. L’energia di impatto Eimp(S0,,ϕ0) di tale ione è una funzione
della posizione di partenza S0 e dell’angolo di fase rf ϕ0 al momento
della creazione. Se invece uno ione entra nello sheath dal plasma e
raggiunge il catodo senza collisioni, l’energia di impatto sarà funzione
della velocità iniziale v0 e nuovamente dell’angolo di fase.
La sezione d’urto dello scambio di carica può ritenersi pressochè
indipendente dall’energia, per cui la velocità di creazione di ioni
termici è costante nello sheath. Ne segue una espressione per la
distribuzione dell’energia del tipo :
I(E)dE ≈ α
∫ exp[−α(1 − S )]dS dϕ
0
0
0
+
E imp ∈[ E, E + dE ]
+ exp(− α )
∫[ f (v ] )dv dϕ
0
E imp ∈ E, E + dE
0
0
(5.2)
dove f(v0) è la distribuzione di velocità degli ioni normalizzata ad
1 in corrispondenza del confine tra plasma e sheath. Il primo termine
descrive il contributo degli ioni creati nello sheath, il secondo
rappresenta gli ioni che entrano nello sheath dal plasma e raggiungono
l’elettrodo senza collisioni. I due tipi di ioni sono descritti come ioni
98
secondari e primari rispettivamente. Il contributo degli ioni primari
porta ad un profilo “a sella” della IEDF, dove i due picchi
rappresentano il massimo e il minimo dell’energia raggiunta dagli ioni
che seguono in misura minima le oscillazioni del potenziale applicato.
Come detto sopra, l’energia d’impatto degli ioni secondari
dipende dalla posizione e dall’angolo di fase di partenza. Ci si aspetta
un picco nella distribuzione di energia degli ioni quando si annullano le
derivate prime dEimp/dS0 e dEimp/dϕ0. La dipendenza di Eimp da ϕ0 è
mostrata in fig.5.22 [40]. Per S0 fissata, l’energia di impatto è una
funzione periodica di ϕ0. Oltre ai due estremi Emin ed Emax si trova una
regione centrata attorno a ϕ0=0 in cui dEimp/dϕ0 =0. Questa regione ∆ϕ0
corrisponde a ioni che sono stati creati nella regione oltre il fronte
elettronico in cui il campo elettrico totale è uguale a zero. Per questi
ioni quindi c’è un ritardo tra la creazione e l’accelerazione, che porta
l’energia d’impatto ad esere indipendente dall’angolo di fase ϕ0 quando
quest’ultimo è circa uguale a zero. Ci sono quindi tre diverse energie
che soddisfano la condizione necessaria per avere un picco nella IEDF
dEimp/dϕ0 =0. Queste tre energie sono indicate con Emax , Emin e Eϕ=0.
Figura 5.22 Dipendenza dell’energia ionica dall’angolo di fase iniziale
99
La fig. 5.23 mostra la dipendenza di Emax , Emin ed Eϕ=0
dalla posizione di partenza S0. Mentre le prime due decrescono in
maniera continua all’aumentare di S0, Eϕ=0 mostra una serie di estremi
per i quali sono verificate entrambe le condizioni dEimp/dS0=0 e
dEimp/dϕ0=0. A questi estremi si possono far corrispondere picchi nella
IEDF, e ricondurre in ultima analisi l’origine dei picchi agli ioni creati
per ϕ0=0, ovvero quando il campo elettrico nello sheath è trascurabile.
Ovviamente il numero di picchi è strettamente correlato al
numero di cicli rf impiegati dagli ioni per attraversare lo sheath, quindi
è possibile ottenere una informazione diretta sul tempo di transito
osservando la IEDF.
Figura 5.23 Dipendenza dell’energia ionica dalla posizione di partenza e dal
tempo di transito
100
Le figure riportano le funzioni di distribuzione dell’energia degli
ioni O2+ risultanti dalla simulazione, in diverse posizioni e per due
temperature.
iedf ioni O2
-2
+
2,0 10
x= 0.12 cm
x= 0.2 cm
-2
x=0.28 cm
-3/2
iedf (eV )
1,5 10
-2
1,0 10
-3
5,0 10
0
0,0 10
0
8,0 10
1
1,6 10
1
1
2,4 10
3,2 10
energia (eV)
Figura 5.24 Picchi nella IEDF degli O2+ in prossimità delle pareti
iedf ioni O2
-2
+
2,0 10
x= 0.4 cm
x= 0.48 cm
x= 0.56 cm
-2
-3/2
iedf (eV )
1,5 10
-2
1,0 10
-3
5,0 10
0
0,0 10
0
8,0 10
1
1,6 10
1
2,4 10
energia (eV)
Figura 5.25 Picchi nella IEDF degli O2+ allontanandosi dallo sheath
101
1
3,2 10
iedf ioni O2
x = 0.64 cm
x = 0.76 cm
x = 0.88 cm
0
-3/2
iedf (eV )
10
+
10
-1
-2
10
0
0 10
4 10
0
8 10
0
1 10
1
energia (eV)
Figura 5.26 Progressiva perdita di struttura della IEDF degli O2+ verso il bulk
Dalla figura 5.24 è evidente che i picchi hanno maggiore
intensità per energie minori, in accordo con tutte le distribuzioni di
energia in questi plasmi.
I picchi sono inoltre più alti e più ravvicinati man mano
che ci si allontana dalla parete: questo fenomeno è dovuto alla diversa
velocità degli ioni lungo lo sheath. La regolarità della variazione di
spaziatura tra picchi successivi per diverse posizioni è indice di una
correlazione di fase tra velocità di ingresso nello sheath e angolo di
fase RF.
Le figure 5.35 e 5.26 mostrano la perdita della struttura
della IEDF quando ci si allontana dallo sheath: a centro plasma gli ioni
sono praticamente tutti termici, come si evince anche dai grafici
sull’energia.
Per quanto riguarda lo studio a due diverse temperature, si
trova una diminuzione dell’ampiezza dei picchi ed un aumento della
102
loro spaziatura nel caso di temperatura maggiore, similmente a quanto
avviene per una temperatura fissata avvicinandosi alle pareti. Questo
conferma che la spiegazione di questo fenomeno risieda ancora una
volta nella energia acquistata dagli ioni a causa della maggiore
temperatura.
La IEDF degli ioni O+ mostra dei picchi molto più stretti e
frequenti rispetto a quelli degli O2+. La maggiore frequenza è indice
della maggiore velocità del processo di scambio di carica con l’atomo
O. I picchi sono inoltre molto ben definiti grazie alla maggiore mobilità
degli ioni leggeri.
iedf ioni O
+
-2
3,0 10
x = 0.24 cm
x = 0.32 cm
-2
2,5 10
-3/2
iedf (eV )
-2
2,0 10
-2
1,5 10
-2
1,0 10
-3
5,0 10
0
0,0 10
1
1 10
2 10
1
3 10
energia (eV)
1
4 10
1
Figura 5.27 Picchi nella IEDF degli ioni O+ nello sheath
Nella figura 5.27, in corrispondenza dei valori più alti di
energia si nota la “sella” dovuta alla modulazione dello sheath, a cui gli
ioni O+ sono più sensibili data la loro minore massa.
Allontanandosi dallo sheath si nota una “spalla” per i
valori più alti di energia, che regredisce sempre più verso valori minori
man mano che si perde la struttura a picchi (figure 5.28 e 5.29). Questa
103
caratteristica mostra chiaramente come la probabilità di dissociazione
degli ioni creati per scambio di carica nello sheath sia molto minore
della probabilità di dissociazione degli ioni nel plasma.
iedf degli ioni O
+
-1
1,0 10
x = 0.44 cm
x = 0.56 cm
-2
-3/2
iedf (eV )
8,0 10
-2
6,0 10
-2
4,0 10
-2
2,0 10
0
0,0 10
0
0 10
1 10
1
2 10
1
3 10
1
energia (eV)
+
Figura 5.28 IEDF degli ioni O e progressivo rientro verso valori più bassi di
energia
iedf degli ioni O
+
-1
7,0 10
x = 0.68 cm
x = 0.8 cm
-1
6,0 10
-1
-3/2
iedf (eV )
5,0 10
-1
4,0 10
-1
3,0 10
-1
2,0 10
-1
1,0 10
0
0,0 10
4 10
0
1 10
1
2 10
1
3 10
1
energia (eV)
Figura 5.29 Perdita di struttura e assestamento verso valori di energia termica
per gli ioni O+ a centro plasma
104
Per quanto detto all’inizio del paragrafo, la IEDF degli ioni
negativi non è soggetta ad una struttura a picchi. Le figure 5.30 e 5.31
-3/2
iedf (eV )
confermano questa ipotesi.
10
2
10
1
10
0
10
-1
10
-2
10
-3
iedf ioni O2
-
x
x
x
x
4 10
0
1 10
=
=
=
=
1
0.16 cm
0.4 cm
0.6 cm
0.88 cm
2 10
energia (eV)
Figura 5.30 IEDF degli ioni O2
-
iedf degli ioni O10
-3/2
iedf (eV )
10
10
10
10
10
2
x
x
x
x
1
=
=
=
=
0.12 cm
0.4 cm
0.68 cm
0.96 cm
0
-1
-2
-3
0
2,0 10
0
6,0 10
energia (eV)
Figura 5.31 IEDF degli ioni O-
105
1
1,0 10
1
1,4 10
1
Gli ioni O- si stabiliscono verso valori termici di energia verso il
centro del plasma, mentre gli ioni O2- mantengono una IEDF pressochè
costante nelle varie posizioni essendo maggiormente confinati nel
centro dal campo ambipolare.
5.8 Potenza depositata e reazioni
Al termine sorgente nell’equazione del calore contribuisce
l’energia depositata o assorbita in ogni reazione che si verifica nella
simulazione. La raccolta è stata effettuata distinguendo tra l’energia
depositata nelle collisioni che hanno come protagonisti gli elettroni,
quella depositata nelle reazioni di scambio di carica tra ioni, e quella
depositata in ogni tipo di reazione tra specie pesanti. Nell’equazione
del calore il termine S compare come flusso di energia, ovvero come
potenza per metro cubo. La potenza depositata in funzione della
posizione nei diversi canali di raccolta è riportata nelle figure seguenti.
4
3
)
potenza depositata (W/m
10
10
3
2
10
0
0 10
-2
1 10
posizione (m)
Figura 5.32 Potenza depositata nelle reazioni da impatto elettronico
106
2 10
-2
2
3
)
potenza depositata (W/m
8,0 10
2
6,0 10
2
4,0 10
2
2,0 10
0
0,0 10
2
-2,0 10 0
0 10
1 10
-2
2 10
-2
posizione (m)
Figura 5.33 Potenza depositata dagli ioni per scambio di carica
5
3
)
potenza depositata (W/m
10
10
10
4
3
2
10
0
0 10
1 10
-2
posizione (m)
Figura 5.34 Potenza depositata dalle reazioni tra specie pesanti
107
2 10
-2
La forma della curva che descrive la raccolta energetica
nelle reazioni da impatto elettronico richiama la distribuzione di
energia e di posizione degli elettroni. Allo stesso modo la figura 5.33
conferma che lo scambio di carica avviene nello sheath, laddove gli
ioni riescono a raggiungere energia sufficiente a fare avvenire la
reazione; l’energia depositata al centro del plasma è infatti nulla.
Che lo scambio di carica sia praticamente l’unica reazione
(a parte la collisione elastica tra elettroni e tra elettroni e specie pesanti)
lo si vede dalla figura 5.34, che rappresenta la somma della potenza
raccolta da tutte le reazioni tra specie pesanti. Tutte queste reazioni,
siano esse esotermiche o endotermiche, avvengono nella zona centrale
della scarica.
Sono riportati in seguito i grafici relativi alle singole
reazioni.
O2- + O2+ -> 2O2
O- + O2 -> O2 + O
O- + O -> O2 + e02- + O+ -> O2 + O
4
3
)
potenza depositata (W/m
1,5 10
4
1,0 10
3
5,0 10
0
0,0 10
0
0 10
1 10
0
2 10
0
posizione (m)
Figura 5.35 Potenza depositata
La figura 5.35 mostra come l’O2 venga rigenerato al centro
del plasma a causa delle ricombinazioni. Le prime due reazioni
108
depositano molta più potenza a causa dell’elevata concentrazione delle
specie protagoniste. La reazione O2-+O+ → O2 +O pur essendo
fortemente esotermica, deposita poca potenza a causa della bassa
concentrazione di reagenti.
2
-3
)
potenza depositata (J/m
3,0 10
O2- + O -> O3 + e-
2
2,5 10
2
2,0 10
2
1,5 10
2
1,0 10
1
5,0 10
0
0,0 10
0
0 10
5 10
-1
1 10
0
2 10
0
2 10
0
posizione (m)
Figura 5.36
La scarsità delle specie protagoniste ed il basso guadagno
(0.61 eV) fa si che la reazione di figura 5.36 depositi poca potenza.
109
4
1,0 10
3
)
potenza depositata (J/m
O2- + O2+ -> O2 + 2O
3
8,0 10
3
6,0 10
3
4,0 10
3
2,0 10
0
0,0 10
0
0 10
5 10
-1
1 10
0
2 10
0
2 10
0
posizione (m)
Figura 5.37
O+ + O- -> 2O
2e- + O+ -> O + e0
3
)
potenza depositata (J/m
6,0 10
0
5,0 10
0
4,0 10
0
3,0 10
0
2,0 10
0
1,0 10
0
0,0 10
0
0 10
5 10
-1
1 10
0
2 10
0
2 10
0
posizione (m)
Figura 5.38
Le reazioni di figura 5.38 depositano una quantità di
potenza trascurabile.
110
O- + O2* -> O2- + O
O- + O2** -> O + O2 + e0
3
potenza depositata (J )/ m
0,0 10
-2,0 10
-4,0 10
-6,0 10
-8,0 10
-1,0 10
2
2
2
2
3
3
-1,2 10
0
0,0 10
-1
0
5,0 10
0
1,0 10
1,5 10
0
2,0 10
posizione (m)
Figura 5.39
Le reazioni di figura 5.39, pur non essendo fortemente
endotermiche,
assorbono
molta
potenza
a
causa
dell’elevata
concentrazione degli ioni O- e degli stati metastabili dell’ossigeno
molecolare.
111
0
3
potenza depositata (J )/ m
0,0 10
-5,0 10
-1,0 10
-1,5 10
-2,0 10
-2,5 10
-2
2e- + O2+ ->O2 + e-
-1
e- + O3 -> O2- + O
-1
-1
-1
-1
-3,0 10
0
0,0 10
-1
0
5,0 10
1,0 10
0
1,5 10
0
2,0 10
posizione (m)
Figura 5.40
Si vede che le reazioni endotermiche assorbono molta
meno potenza di quanta ne depositino quelle esotermiche. Il resto della
potenza viene rilasciata per irraggiamento.
Al solito, in un ciclo RF variano l’energia, la densità e la
velocità dei soli elettroni. Pertanto varierà anche la potenza depositata
in seguito a collisioni da impatto elettronico.
112
4
.25
.5
.75
1
media
3
)
potenza depositata (J/m
2,0 10
4
1,5 10
4
1,0 10
3
5,0 10
0
0,0 10
0
0,0 10
-3
-2
5,0 10
1,0 10
-2
1,5 10
-2
2,0 10
posizione (cm)
Figura 5.41 Variazione della potenza depositata da reazioni da impatto
elettronico in un ciclo RF
La
figura
5.41
rivela
chiaramente
l’avanzamento
e
l’indietreggiamento del fronte elettronico dentro e fuori dallo sheath.
La lunga coda e lo spostamento del massimo verso il centro della
scarica per 1/4 e 3/4 del ciclo RF è dovuto agli elettroni “caldi” prodotti
quando il fronte elettronico penetra completamente nello sheath.
113
5.9 Ionizzazione
Le ionizzazioni, anch’esse dovute ad impatto elettronico,
non si verificano ad un tasso uniforme, infatti un un ciclo RF variano la
velocità e la densità degli elettroni, mentre rimane pressochè invariata
la densità delle molecole o atomi che vengono ionizzati. La figura 5.41
riporta la variazione del tasso di ionizzazione dell’O2 in un ciclo RF.
posizione (cm)
2.00
9e+17
8e+20
tasso di ionizzazione
1.50
1.00
0.50
0.00
0.00
0.20
0.40
0.60
0.80
1.00
cicli rf
Figura 5.42 Variazione del tasso di ionizzazione dell’O2 in un ciclo RF
23
0.25
0.5
0.75
1
media
-3 -1
)
tasso di ionizzaziones (m
10
10
10
22
21
0
0,0 10
-3
-2
5,0 10
1,0 10
-2
1,5 10
-2
2,0 10
posizione (m)
Figura 5.43 Tasso di ionizzazione dell’O2 in quattro frazioni di ciclo RF in
funzione della posizione
114
CONCLUSIONI
Il codice numerico messo a punto nell’ambito di questa
tesi implementa un nuovo modello auto-coerente per una scarica RF in
ossigeno in un reattore a piatti paralleli. Il numero delle specie presenti
e l’attenzione rivolta alle reazioni in gioco lo rendono completo anche
dal punto di vista della teoria cinetica e della cinetica chimica.
È stata evidenziata una ricca dinamica caratterizzata dal
non equilibrio locale, non solo tra le temperature elettroniche e ioniche,
ma anche all’interno delle stesse distribuzioni traslazionali. Esse sono
infatti lontane dalla distribuzione di Boltzmann, come dimostrano
soprattutto i picchi dinamici trovati nella distribuzione di energia degli
ioni positivi nella regione di sheath.
È emersa inoltre l’impossibilità si trattare separatamente il
trasporto reattivo delle specie neutre e quello delle cariche elettriche,
rendendo necessario l’accoppiamento tra il problema di VlasovBoltzmann-Poisson multispecie e l’equazione di reazione e diffusione
per il trasporto delle particelle neutre.
L’importanza di una buona simulazione in cui i parametri
di plasma rispondano correttamente alle variazioni delle condizioni
applicabili dall’esterno rende questo modello un’ottima base
‘sperimentale’ in senso lato per studi di carattere fondamentale.
Per quanto riguarda gli sviluppi futuri è prevista
l’estensione a due dimensioni spaziali della simulazione per il caso di
simmetria cilindrica, con tre dimensioni nello spazio delle velocità.
115
A conclusione di questo lavoro voglio ringraziare tutti i docenti,
ricercatori, dottorandi e laureandi presso il Centro di Studio per la
Chimica dei Plasmi, per la disponibilità e la simpatia che mi hanno
sempre dimostrato. Ringrazio poi quanti, volendomi bene, mi sono stati
vicini in particolare nel corso di questo impegno.
116
APPENDICE
LIVELLI ENERGETICI DELLA MOLECOLA DI
OSSIGENO
Energia potenziale in funzione della distanza internucleare
117
118
BIBLIOGRAFIA
[1] Longo S , Capitelli M 1994 Plasma Chem Plasma Proc 14 1
[2] Longo S , Capitelli M and Hassouni K 1997 J.Physique IV C4 7
271
[3] Longo S, Capitelli M, Hassouni K 1998 J. Thermophysics and
Heat Transfer 12 473
[4] Iasillo D Tesi di Laurea in Fisica , Università degli Studi di Bari
1994
[5] Hockney RW 1966 “Computer Simulation of anomalous plasma
diffusion and numerical solution of Poisson’s equation”
Phys.Fluids 9 1826
[6] Woolfson J, Pert C 1999 An Introduction to Computer Simulation,
Oxford University Press
[7] Boeuf JP , Belenguer P in Non Equilibrium Processes in Partially
Ionized Gases, M Capitelli and JM Bardsley, Eds. New York:
Plenum 1990
[8] Lieberman MA 1988 IEEE Trans. Plasma Sci., 16 638
[9] Surendra M , Graves DB , Jellum JM 1990 Appl. Phys. Lett. 56 11
1022
[10] Godyak VA 1972 Sov. Phys. Tech. Phys. 16 7 1073
[11] Kushner MJ 1986 IEEE Trans. Plasma Sci PS 14 188
[12] Belenguer P Tesi di Dottorato, Tolosa 1990
[13] Birdsall CK, Langdon AB 1985 Plasma Physics via Computer
Simulation McGraw-Hill NY
[14] Birdsall CK 1991 “Particle in Cell Charged-Particle Simulations,
Plus Monte Carlo Collisions With Neutral Atoms, PIC-MCC”
IEEE Trans. Plasma Sci 19 2 65
[15] Vahedi V , Surendra M 1995 “A Monte Carlo Collision Model for
the Particle in Cell Method: applications to argon and oxygen
discharges” Comput. Phys. Commun. 87 179
[16] Cohen BI , Langdon AB , Hewett DW and Procassini RJ 1989
81 151
J.Computat. Phys.
[17] Skullerud HR 1968 J. Phys. D: Appl. Phys. 1 1567
[18] Spanier J and Gelbard EM 1969 Monte Carlo Principles and
Neutron Transport Problems (Reading, MA: Addison Wesley)
[19] Eastwood SW, Hockney RW 1981 Computer Simulation using
Particles, McGraw-Hill, NY
[20] Longo S 2000 “Monte Carlo models of electron and ion transport
in non-equilibrium plasmas” Plasma Sources Sci. Technol. 9 468
[21] Phelps AV 1985 Tabulations of cross sections and calculated
transport and reaction coefficients for electron collisions with O2,
JILA Information Center Report, University of Colorado, Boulder
119
[22] Rapp D, Briglia D 1965 J. Chem. Phys. 43 1480
[23] Vahedi V, Birdsall CK, Lieberman MA, DiPeso G, Rognlien TD
1993 “Capacitive RF discharges modelled by particle-in-cell
Monte Carlo simulation” Plasma Sources Sci. Technol. 2 261, 273
[24] Smirnov BV 1982 Negative Ions (McGraw-Hill, New York)
[25] Itikawa Y, Hara S, Kato T, Nakazaki S, Pindzola MS, Crandall
DH 1985 “Electron impact cross sections and rate coefficients for
excitation of C and O Ions”, Atomic Data and Nuclear Data
Tables 33 149
[26] Lieberman MA, Lichtenberg AJ 1994 Principles of plasma
discharges and materials processing, John Wiley & Sons, NY
[27] Lee C, Graves DB, Lieberman MA, Hess DW 1994 J.
Elettrochem. Soc., 141 1546
[28] Eliasson B, Kogelschatz U 1986 Basic data for modelling of
electrical discharges in gases: oxygen, Report KLR 86-11C,
Brown Boveri Konzernforschung, CH-5405 Baden
[29] Capitelli M, Molinari E 1980 “Kinetics of dissociation processes
in plasmas in the low and intermediate pressure range”, Topics in
Current Chemistry 60
[30] Kossyi IA, Kostinsky AY, Matveyev AA, Silakov VP 1992
Plasma Sources Sci. Technol. 1 207
[31] Perrin J 1993 “Modelling of the power dissipation and
rovibrational heating and cooling in SiH4-H2 RF glow discharges”
J. Phys. D: Appl. Phys 26 1662
[32] Baggerman JAG, Visser RJ, Collart EJH 1994 “Power dissipation
measurements in a low-pressure N2 radio-frequency discharge” J.
Appl. Phys. 76 2
[33]Visser RJ 1989 “Determination of the power and current densities
in argon and oxygen plasmas by in situ temperature
measurements” J. Vac. Sci. Technol. A 7 2 189
[34] Bogaerts A, Gijbels R 2000 “Modelling of radio-frequency and
direct current glow discharges in argon” J.Tech.Phys. 41 1 183
[35] Tsederberg NV 1965 Thermal Conductivity of Gases and Liquids
(MIT Press Cambridge, Mass)
[36] Runchal AK 1972 Int. J. Num. Methods Eng. 4 541
[37] Patankar SV 1980 Numerical Heat Transfer and Fluid Flow,
McGraw-Hill, NY
[38] Press WH, Flannery BP, Teukolsky SA, Vetterling WT 1986
Numerical Recipes-The Art of Computer Simulation , Cambridge
[39] Kohler K, Coburn JW, Horne DE, Kay E 1985 “Plasma potentials
of 13.56 MHz rf argon glow discharges in a planar system”, J.
Appl. Phys. 57 59
120
[40] Surendra M, Graves DB 1991 “Particle simulations of RadioFrequency Glow Discharges”, IEEE Transactions on Plasma
Science, 19 144
[41] Wild C, Koidl P 1991 “Ion and electron dynamics in the sheath of
radio-frequency glow discharges”, J. Appl. Phys. 69 2909
121