IL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ
RISTRETTA
ISIDORO FERRANTE
1. I NTRODUZIONE
In questo ciclo di lezioni ci proponiamo di seguire un percorso molto formale nella
formulazione della teoria, partendo dai postulati di Einstein, e riscrivendo le leggi della
fisica utilizzando quello che tecnicamente si chiama formalismo covariante, ovvero
quel sistema di notazione che permette di riconoscere immediatamente la struttura
matematica delle varie quantità fisiche che entrano in gioco.
A partire dal formalismo covariante, si discende ai risultati particolari in termi di
quantità note e misurabili, e si cerca di spiegare gli effetti in termini di semplici
osservazioni.
Ovviamente un simile approccio non è pensabile nell’insegnamento della scuola secondaria: ma del resto lo scopo di queste lezioni non è quello di fornire gli strumenti
per l’insegnamento, bensì quello di mettere gli insegnanti in condizione tale da poter
in caso affrontare la lettura di un testo specialistico sull’argomento, per cercare le risposte alle domande che spesso ingenuamente ci si pone davanti ad una teoria che in
alcuni casi fornisce dei risultati lontani dal senso comune.
Si daranno per conosciuti gli aspetti fondamentali della teoria, dal significato di sitema
di riferimento inerziale, alle trasformazioni di Lorentz, alle contrazioni delle lunghezze
e dilatazione dei tempi.
2. A LCUNI
PROBLEMI DELLA MECCANICA NEWTONIANA E
DELL’ ELETTROMAGNETISMO CLASSICO .
La situazione della fisica precedente all’articolo sulla relatività generale del 1905 presentava alcuni piccoli problemi di tipo logico o sperimentale che gli scienziati del tempo cercavano di risolvere tramite situazioni ad hoc, senza pensare che un ripensamento
delle leggi della meccanica fosse necessario per una loro completa comprensione. La
meccanica newtoniana, anche se riscritta parzialmente nel ’700 e ’800, era rimasta sostanzialmente invariata, nella sostanza, dall’epoca dei principia di Newton. Qualche
problemino c’era, è vero, di natura sia logica che sperimentale. Il principale problema
di natura logica era ovviamente quello dell’azione a distanza: non era per niente chiaro
il meccanismo per cui due corpi avrebbero potuto influenzarsi a vicenda attraverso lo
spazio, e il concetto stesso aveva avuto qualche difficoltà ad affermarsi. C’era anche
il problema di definire cosa fosse esattamente un sistema inerziale, e di capire come
1
2
italianISIDORO FERRANTE
mai una certa classe di sistemi di riferimento risultasse privilegiata rispetto ad altri,
ma sembrava un problema minore. Dal punto di vista sperimentale, le cose andavano
decisamente meglio: l’unica osservazione non spiegabile tramite la meccanica newtoniana era la famosa precessione di 43” per secolo nel perielo di Mercurio, peraltro un
residuo di una precessione osservata di ben 574” per secolo, di cui la teoria newtoniana
riusciva a spiegare solamente 531” per secolo
Le cose peggiorarono quando si cercò di rendere coerenti le leggi della meccanica con
l’elettrodinamica di Maxwell. Un primo problema si ha ad esempio nella formulazione
~ Nella meccanica newtoniana si assumeva valesse
della forza di Lorentz1, F~ = q ~vc × B.
la relatività di Galileo: ovvero, dato un sistema chiuso (chiamiamolo laboratorio) non è
possibile determinare se questo si muove o sta fermo senza compiere esperimenti che
coinvolgano in qualche maniera gli oggetti che si trovano all’esterno del laboratorio
stesso. In modo del tutto formale si dice che le equazioni del moto devono risultare
invarianti per trasformazioni del tipo x~0 = ~x − ~v t.
Osserviamo innanzitutto che una trasformazione del genere non ha effetti sulla accelerazione, e pertanto nemmeno sulla forza: questo vuol dire che la forza tra due corpi
non può dipendere dalla posizione e velocità assoluta di uno di essi, bensì solamente
dalla posizione e velocità relativa: F~1→2 = F~ (~x1 − ~x2 , ~v1 − ~v2 ). La forza di Lorentz invece non ha questa caratteristica, a meno di non interpretare la velocità ~v come
misurata in un qualche particolare sistema di riferimento.
La situazione in realtà è decisamente peggiore: infatti le equazioni delle onde elettro2~
~ 2E
~ = 0 NON risulta invariante per trasformazioni di Galileo, e
magnetiche, c12 ∂∂tE2 − ∇
alla stessa maniera non risulta invariante il complesso delle equazioni di Maxwell. Altri problemi derivavano dall’analisi di problemi apparentemente semplici: ad esempio,
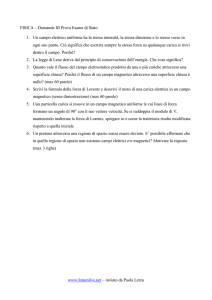
si considerino due particelle in moto con la stessa velocità ~v in una direzione che forma un angolo con la congiungente (figura 2.1). Esiste un sitema di riferimento in cui
queste cariche sono in quiete, e si attraggono con una forza diretta lungo la congiungente data dalla formula di Coulomb. Nel sistema di riferimento in cui le cariche sono
in moto, ognuna di queste produce un campo magnetico le cui linee di forza sono circonferenze coassiali con la linea di moto; in conseguenza di ciò, su ciascuna delle due
cariche nasce una forza Fm di origine magnetica che non è diretta lungo la congiungente. Sommata alla forza elettrica, si ottengono due risultati interessanti: innanzitutto,
tra le due cariche si osserva una coppia che tende a farle ruotare; in secondo luogo,
nel sistema in cui le due cariche sono a riposo la forza è diretta lungo la congiungente:
le trasformazioni di Galileo prevedono invece che questa NON cambi direzione. Che
fine fa il principio di azione e reazione? E la conservazione del momento angolare? E
come mai le trasformazioni di Galileo falliscono?
Un problema molto simile vien fuori da un esempio altrettanto semplice: si consideri
la situazione esemplificata in figura 2.2: stavolta le due velocità non devono essere
1
Adopereremo il sistema di unità di misura detto gaussiano, in quanto utile per semplificare molte
delle formule adoperate: vedi la sezione dedicata all’elettromagnetismo.
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
3
F IGURA 2.1. Due cariche viste da un sistema di riferimento che si
muove con velocità v rispetto ad ess: sorgono delle forze di natura
magnetica che fanno sì che la forza che agisce su ciascuna delle due
cariche non risulti diretta lungo la congiungente.
q
Fe
v
Fm
F
v
q
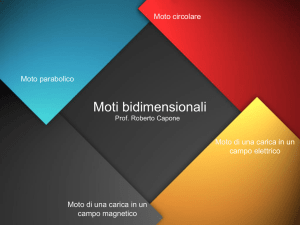
F IGURA 2.2. Sulla carica 1 agisce solamente la forza dovuta al campo
elettrico generato dalla carica 2; su questa invece agiscono sia la forza
dovuta al campo elettrico che quella dovuta al campo magnetico.
v1
F 21
v2
Fm
F12
necessariamente uguali. Sulla carica superiore agisce solamente la forza dovuta al
campo elettrico della carica inferiore: infatti, lungo la direzione del moto il campo
magnetico è nullo.
Sulla carica inferiore invece agiscono sia le forze dovute al campo elettrico che quelle
dovute al campo magnetico prodotti dalla carica superiore.
Stavolta, la forza di origine magnetica non si annulla, anzi è diretta verso sinistra. Di
nuovo,che fine fa il principio di azione e reazione?
In realtà i fisici della fine del diciannovesimo secolo non erano troppo turbati da queste
osservazioni: infatti, la natura ondulatoria della luce, così come era ormai stata definitivamente accertata sperimentalmente, richiede nel loro modo di vedere l’esistenza di
un mezzo in grado di trasportare le vibrazioni dovute ai campi elettromagnetici.
Si pensava insomma che, analogamente a quanto accade con le onde sonore, esistesse un qualche substrato, detto etere, in grado di propagare le onde elettromagnetiche.
4
italianISIDORO FERRANTE
A questo punto, la mancata validità delle relatività galileiana per le equazioni elettromagnetiche non veniva a costituire più un problema, perché si veniva a creare un
sistema di riferimento privilegiato, quello in cui l’etere si trovava a riposo, appunto,
nel quale valevano le equazioni di Maxwell: in tutti gli altri sistemi di riferimento sarebbero comparsi dei fattori correttivi generalmente troppo piccoli per essere rivelati
sperimentalmente.
Purtroppo tutti gli esperimenti destinati a determinare le caratteristiche fisiche dell’etere portavano a risultati contraddittori: un classico esempio è il risultato di Fizeau
sulla velocità della luce all’interno di dielettrici in moto. Fizeau misurò la velocità
della luce all’interno di un tubo percorso da un flusso di acqua in moto con velocità v, trovando dei
risultati compatibili con l’ipotesi che la velocità aumentasse di un
1
termine 1 − n2 v: si tratta di un risultato difficilmente comprensibile in meccanica
classica, in quanto porterebbe ad ipotizzare che l’etere venisse trascinato solamente
parzialmente dal moto del fluido.
Inoltre, i tentativi di misurare direttamente il moto della Terra attraverso l’etere, soprattutto ad opera di Michaelson e Morley, portarono, come è noto, a risultati negativi.
2.1. I postulati di Einstein. La strategia adoperata da Einstein è quella di rifiutare l’idea dell’esistenza di un sistema di riferimento inerziale privilegiato: assieme a questo
principio, Einstein assume anche la congettura che la velocità della luce sia la stessa
in qualunque sistema di riferimento inerziale.
A partire da questi due postulati, Einstein ricava rapidamente le conseguenze più rivoluzionare della sua teoria: la revisione del concetto di simultaneità, le trasformazioni
di Lorentz come equazioni che collegano le misure di tempo e distanza tra due sistemi
inerziali diversi, la contrazione delle lunghezze e la dilatazione dei tempi, l’aberrazione
della luce, fino ad arrivare alle equazioni del moto dell’elettrone.
In questa trattazione noi seguiremo un approccio simile, ma partendo non dall’invarianza della velocità della luce, bensì dalla richiesta di invarianza delle equazioni della
dinamica e dell’elettrodinamica rispetto alle trasformazioni di Lorentz. Si tratta di un
approccio più moderno, in gran parte dovuto ad un ex professore di Einstein, Minkowsky, il quale si occupò di formalizzare la struttura dello spazio tempo così come
concepito da Einstein, il quale dapprima rimase perplesso di fronte al lavoro del collega, salvo poi accettarlo in toto quando si rese conto di quanto venisse facilitata la
formulazione della teoria della relatività generale.
2.2. Il concetto di invarianza. Si dice che una determinata legge fisica espressa nella
forma A = B è invariante sotto una certa trasformazione se questa trasformazione
cambia nello stesso modo sia la quantità A che la quantità B trasformando l’equazione
in un’altra del tipo A0 = B 0 .
Le leggi della fisica classiche, newtoniane, ad esempio sono invarianti per rotazioni
del sistema di riferimento: ad esempio, in F~ = m~a sia la forza che la accelerazione si trasformano alla stessa maniera se si adopera un sistema di riferimento ruotato
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
5
rispetto ad un qualunque asse. Certamente, le componenti dei vettori F~ e ~a cambieranno nel passaggio al nuovo sistema di riferimento, ma in modo tale che l’uguaglianza
venga sempre rispettata. Altre due invarianze importanti nella meccanica newtoniana sono quelle per traslazioni spaziali (che trasforma la coordinata ~x nella coordinata
~x0 = ~x + x~0 ) o temporali (t → t0 = t + t0 ): ovvero, cambiando l’origine delle coordinate o l’origine dei tempi, le equazioni devono rimanere valide. Questo ci porta a
concludere, ad esempio, che la forza tra due corpi a e b può dipendere solamente dalla
loro posizione relativa e non da quella assoluta: ovvero F~ab = F~ (~xa − ~xb ).
Altre due importanti invarianze sono quelle per inversioni spaziali, o parità, o per
inversioni temporali.
La prima ci dice che non ha importanza se prendo una terna di assi cartesiani destrorsi
ˆ ŷ, ẑ) → (x̂0 , ŷ 0 , ẑ 0 ) =
o sinistrorsi, ottenuta invertendo il verso di tutti e tre gli assi(x,
(−x̂, −ŷ, −ẑ): infatti le componenti dell’accelerazione cambieranno segno così come
~ In
quelle della forza2. Un caso particolare è dato dalla forza di Lorentz: F~ = qv
~ × B.
questa espressione, infatti, cambiando di segno alle componenti degli assi, si giungerebbe ad un assurdo, in quanto il prodotto vettoriale rimarrebbe alla fine dello stesso
segno.... Il problema viene risolto in quanto dallo studio delle equazioni di Maxwell si
scopre che le componenti di del campo magnetico non cambiano di segno se si cambia
~ è uno pseudovettore,
il segno agli assi del sistema di riferimento! Si dice allora che B
in quanto si comporta come un vettore per rotazioni, ma in modo diverso per trasformazioni di parità. Una quantità con proprietà simili è il momento della quantità di
moto.
L’invarianza per inversione temporale è una questione invece assai delicata: vuol dire
infatti che ogni processo fisico visto alla rovescia, ossia dalla fine al principio, rimane
sempre un processo fisicamente probabile. Sappiamo che questo è vero microscopicamente: le leggi fondamentali che regolano le interazioni tra le particelle elementari
ubbidiscono a questa regola3; tuttavia sappiamo anche che le leggi macroscopiche, che
coinvolgono le interazioni tra molti corpi, non risultano reversibili temporalmente. Un
esempio banale: in un corpo soggetto ad attrito viscoso, F~ = −κ~v = m~a, per inversione temporale cambia segno il termine della forza, ma non quello dell’accelerazione
(l’accelerazione, in quanto derivata seconda rispetto al tempo, non cambia segno per
inversione temporale, mentre la velocità sì). In questo caso, infatti, la forza sorge dalla
somma degli urti che il corpo subisce contro le molecole del fluido in cui è immerso: i
singoli urti sono reversibili temporalmente, ma il loro effetto complessivo no.
L’ultima invarianza, quella che ci interessa di più, è invece l’invarianza per trasformazioni di Galileo:
2Sappiamo però che
~x0 = ~x − ~v t
questo non è vero se si considerano le interazioni deboli.
In realtà le interazioni deboli sembrano violarla: non esiste una prova sperimentale diretta, ma alcuni
principi teorici uniti a dati sperimentali puntano in questa direzione.
3
6
italianISIDORO FERRANTE
Ovvero, se ci trasferiamo da un sistema di riferimento ad un altro che si muove rispetto
a questo con velocità costante ~v le equazioni non cambiano.
L’accelerazione è ovviamente invariante: infatti, derivando due volte si ottiene ~a 0 = ~a.
Ne segue che perché l’equazione di newton sia invariante deve risultare che la forza
deve dipendere dalla posizione relativa degli oggetti, come già visto, ed eventualmente
dalla velocità relativa: F~ab = F~ (x~a − x~b , ~va − ~vb ).
Nel caso del moto nel fluido viscoso, l’invarianza non è ovviamente rispettata: infatti
in quel caso abbiamo un sistema di riferimento privilegiato, ovvero quello in cui il
fluido è in quiete, e la velocità va misurata relativamente a quel sistema di riferimento.
Passiamo adesso ad esaminare le leggi dell’elettromagnetismo: le equazioni di maxwell sono invarianti rispetto alle trasformazioni viste prima, tranne in un caso: ovvero
quello delle trasformazioni di galileo.
Per trasformazioni di Galileo compaiono nelle equazioni termini aggiuntivi, che non
vi è modo di eliminare. 4
Ora, si potrebbe pensare che cambiando sistema di riferimento questi termini in qualche modo si compensino ad esempio nel calcolo delle forze: bene, non è così. L’elettromagnetismo non è invariante per trasformazioni di Galileo.
Sappiamo però che le trasformazioni di Lorentz, quelle ottenute supponendo l’invarianza della velocità della luce in un cambiamento di sistema di riferimento inerziale,
lasciano invariate le equazioni di Maxwell (e lo dimostreremo nel seguito).
Possiamo quindi cambiare leggermente i postulati di Einstein nei due seguenti:
(1) Le relazioni tra le misure di spazio e di tempo in due sistemi di coordinate che
si muovono con velocità relativa costante sono dati dalle equazioni di Lorentz
(2) Tutte le equazioni fondamentali della fisica sono invarianti sotto trasformazioni
di Lorentz.
Partiremo da questo punto, quindi, e al termine ricaveremo l’invarianza della velocità
della luce.
2.3. Le trasformazioni di Lorentz. Richiamiamo le trasformazioni di Lorentz: in
quasi tutti gli esempi in questi appunti ci riferiremo alla situazione seguente: consideriamo un sistema di riferimento S ed un altro sistema di riferimento S 0 che si muove
rispetto a questo con velocità ~v senza ruotare.
4Ad esempio, consideriamo l’equazione ∇
~ ×E
~
= − 1c ∂∂tB . Per trasformazione di Galileo dal sistema
0
S a quello S che si muove con velocità v lungo l’asse y, i campi si trasformano nel modo seguente:
~ 0 (~x0 ) = E(~
~ x − ~v t), B
~ 0 (~x0 ) = B(~
~ x − ~v t). Le derivate rispetto alla coordinate non cambiano: ∇
~ 0 = ∇,
~
E
~
~0
∂B
∂B
ma la dipendenza rispetto al tempo contiene una dipendenza aggiuntiva! Si ha quindi ∂t = ∂t − (~v ·
~ B.
~
∇)
Si ha quindi un termine aggiuntivo che non va via. Si può pensare che l’errore stia nell’assunto
~ 0, B
~ 0 , ed in effetti è così : nel
secondo cui basti sostituire le nuove coordinate per ottenere i campi E
nuovo sistema di riferimento i campi cambiano. Tenendo conto di questa possibilità, il termine extra si
trasforma in un termine del secondo ordine in v/c, ma non scompare del tutto.
~
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
7
F IGURA 2.3. Due sistemi di riferimento S ed S 0 si muovono con velocità relativa uniforme diretta lungo x. All’istante t = 0 le origini delle
coordinate coincidono, ed inoltre t0 = 0.
S
S’
v
O
O’
Supponiamo inoltre per semplicità che all’istante t = 0 le origini O ed O 0 coincidano,
ed inoltre che in quell’istante anche nel sistema S 0 valga t0 = 0 Supponiamo infine che
la velocità ~v sia orientata lungo l’asse x (vedi figura ).
Allora dato un evento, ovvero un punto di coordinate spaziali x, y, z e coordinate
temporali t, nel sistema S 0 le coordinate saranno:
x0 = q
t0 = q
y0 = y
z0 = z
1
1−
v2
c2
(x − vt)
v t
−
x
2
c2
1 − vc2
1
Solitamente si introducono i simboli: β = vc , γ = √ 1
1−β 2
; inoltre si moltiplica il tempo
t per la velocità della luce in modo da avere grandezze omogenenee.
Con questo simbolismo, le T.L. acquistano una forma simmetrica:
(2.1)
x0
ct0
y0
z0
=
=
=
=
γ (x − βct)
γ (ct − βx)
y
z
Le trasfomazioni inverse si ottengono rapidamente spostando gli apici e cambiando v
con −v:
x
ct
y
z
=
=
=
=
γ (x0 + βct0 )
γ (ct0 + βx0 )
y0
z0
8
italianISIDORO FERRANTE
3. D EFINIZIONE
DELLO SPAZIO QUADRIDIMENSIONALE CON METRICA DI
M INKOWSKY.
Cominciamo col definire delle quantità che chiameremo vettori controvarianti, o anche
quadrivettori (o tetravettori, con una parola in disuso).
Un quadrivettore viene individuato da quattro componenti, che si indicano con gli
indici da 0 a 3. Lo indichiamo col simbolo xµ (fate attenzione all’indice in alto: è
la chiave del formalismo). La componente con indice uguale a 0 è detta componente
temporale del quadrivettore, mentre le componenti da 1 a 3 sono dette componenti
spaziali. Una forma alternativa di indicare un vettore di questo tipo è x µ = (x0 , ~x).
Definiamo un prodotto scalare tra vettori nella forma5 hx, yi = x0 y 0 − x1 y 1 − x2 y 2 −
x3 y 3 = x0 y 0 − ~x · ~y. Osservate questa formula: risulta un po’ complicata da applicare,
soprattutto perché a volta i termini vanno sommati, a volte sottratti. Nel formalismo
einsteniano, questo prodotto scalare si scrive anche nella forma: hx, yi = Σ µ,ν gµν xµ y ν ,
dove gµν è una matrice diagonale i cui elementi sono g00 = 1, g11 = g22 = g33 = −1.
Notare anche stavolta la posizione degli indici. Si assume per convenzione che quando
due indici sono uguali, ed uno si trova in alto e l’altro in basso, allora si somma su di
essi. In questo modo si semplifica ulteriormente la formula:hx, yi = g µν xµ y ν . L’uso
della matrice metrica gµν serve per il momento solamente ad evitare il problema dei
segni che cambiano. Ci si può spingere ancora più in là nella semplificazione: si
definiscono i cosiddetti vettori controvarianti secondo la formula: x µ = gµν xν : un
vettore controvariante ha quindi componenti x0 = x0 , x1 = −x1 , x2 = −x2 , x3 =
−x3 , ovvero xµ = (x0 , −~x). In questo modo il prodotto scalare si scrive nella forma:
hx, yi = xµ y µ = xµ yµ . Da notare che qualunque tra i due vettori x o y può essere
trasformato nell’equivalente controvariante.
Cosa sono questi vettori controvarianti? I fisici di solito si trovano spaesati di fronte a
questo nuovo concetto: in fondo un vettore controvariante sembra uguale ad un vettore
covariante, a parte i segni cambiati. Per i matematici invece la differenza è più chiara,
in quanto riconoscono nei vettori controvarianti gli elementi di uno spazio duale. Il
fatto che la forma di g sia così semplice è dovuta essenzialmente al fatto che stiamo
adoperando coordinate cartesiane. Se avessimo adoperato ad esempio coordinate polari nello spazio, allora la matrice g avrebbe avuto una forma completamente differente e
i vettori controvarianti sarebbero risultati completamente diversi dai vettori covarianti,
al punto di non avere neanche le stesse dimensioni.
5
Nei testi più vecchi, si utilizzano gli indici da 1 a 4: le componenti spaziali del quadrivettore sono le
prome tre, mentre la quarta componente è puramente immaginaria. In questo modo il prodotto scalare
assume la forma consueta, ma assume segno opposto a quello da noi definito: hx, yi = x 1 y 1 + x2 y 2 +
x3 y 3 + (ix4 · iy 4 ) = ~x · ~y − x4 y 4 . Questa notazione apparentemente più semplice risulta perè alla lunga
macchinosa e non è estendibile alla relatività generale.
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
9
Il vantaggio di adoperare questa notazione risulterà evidente quando si passerà a sistemi di coordinate qualsiasi (nella relatività generale).6
Allo stesso modo in cui abbiamo definito la matrice gµν possiamo definire una matrice
g µν che ritrasforma il vettore controvariante in un vettore covariante. Nel linguaggio
gergale, moltiplicare per una matrice gµν abbassa un indice, mentre moltiplicare per
g µν lo alza. In questa semplice rappresentazione, gli elementi di g µν sono uguali a
quelli di gµν . Si noti inoltre che gν µ = gνµ = δνµ dove δ indica il simbolo di kronecker.
3.1. Il gruppo di Lorentz. Fino a questo punto abbiamo costruito uno spazio quadridimensionale, e l’abbiamo dotato di una sua metrica.
Adesso definiamo le trasformazioni di Lorentz come quelle trasformazioni lineari che
lasciano invariato il prodotto scalare tra due quadrivettori, ovvero quelle che, dati due
quadrivettori di componenti xµ , xν , le trasformano in x0µ , y 0µ , in modo tale che x0µ yµ0 =
xµ y µ .
Entrando nel dettaglio, data una qualsiasi trasformazione lineare definita dalla matrice Λµ ν tale che x0µ = Λµ ν xν (si noti che l’ordine degli indici è importante, la
matrice in generale non è simmetrica), e definita la matrice covariante Λ µ ν ottenuta abbassando un indice ed alzandone un altro tramite la matrice metrica g µν , allora
deve aversi:x0µ yµ0 = Λµ k xk Λµ λ yλ , ovvero Λµ k Λν k = δνµ . Questa è una relazione di
ortogonalità tra matrici. Si può dimostrare facilmente come il determinante della matrice Λ debba essere uguale a ±1. A noi interessano solamente quelle trasformazioni
che possono essere ricondotte con continuità alla matrice identità, ovvero quelle con
determinante 1.
Inoltre, vogliamo considerare solamente quelle trasformazioni che non cambiano segno alla coordinata temporale (trasformazioni ortocrone) : si verifica che queste corrispondono al caso Λ00 > 0. Queste due condizioni definiscono le cosiddette trasformazioni di Lorentz proprie. Si dimostra che costituiscono un gruppo, il gruppo di
Lorentz.
Le rotazioni costituiscono un sottogruppo del gruppo di Lorentz: infatti, mantengono
invariato il modulo della parte spaziale e non toccano la parte temporale.
Si può dimostrare anche intuitivamente che una qualunque trasformazione del gruppo
è scrivibile come l’applicazione successiva di un massimo di 6 trasformazioni successive: una rotazione intorno a ciascuno dei dei tre assi, ed una spinta (la spinta è una
Trasformazione di Lorentz che non prevede rotazioni del sistema di riferimento) lungo
ciascuno dei tre assi.
Le matrici che effettuano le trasformazioni sono7:
6Nell’eseguire materialmente i conti, conviene pensare ai vettori controvarianti come vettori colonna,
mentre i vettori covarianti sono vettori riga. Nel passare da un vettore controvariante al corrispondente
covariante, si traspone e si cambia il segno agli indici 1, 2 e 3.
7Consideriamo il primo indice come il numero di riga ed il secondo come numero di colonna.
10
italianISIDORO FERRANTE
x
y
z
1
0
0
0
1
0
0
0
1
0
0
0
rotazioni
0
0
0
1
0
0
0 cos θx sin θx
0 − sin θx cos θx
0
0
0
cos θy 0 sin θy
0
1
0
− sin θy 0 cos θy
0
0
0
cos θz sin θz 0
− sin θz cos θz 0
0
0
1
spinte
γ
−βγ 0 0
−βγ
γ
0 0
0
0
1 0
0
0 1
0
γ
0 −βγ 0
0
1
0
0
−βγ 0
γ
0
0
0
0
1
γ
0 0 −βγ
0
1 0
0
0
0 1
0
−βγ 0 0
γ
dove, seguendo la notazione usuale, abbiamo posto per brevità β = vc , γ = √ 1
1−β 2
.
3.2. Scalari, quadrivettori, tensori. Fin qui abbiamo incontrato due tipi di grandezze: quelle che per trasformazioni di Lorentz rimangono invarianti, e li chiameremo
scalari, e i quadrivettori, che invece si trasformano tramite la matrice Λ.
Possiamo generalizzare la nozione di quadrivettore considerando una grandezza munita di N indici, ciascuno dei quali si può alzare od abbassare tramite la matrice g µν ,
che da un sistema all’altro si trasforma tramite moltiplicazione di ciascuno degli indici
per una matrice Λ: si parla allora di tensori di rango N. Gli scalari sono quindi tensori
di rango 0 e i quadrivettori tensori di rango 1. Adoperemo nel seguito quasi esclusivamente tensori di rango 2, che quindi i trasformano sotto T.L. secondo la formula:
T 0µν = Λµ k Λµ λ T κλ .
A partire da due vettori si possono costruire due tensori indipendenti, uno simmetrico
e uno asimmetrico:
S µν = xµ y ν + xν y µ
Aµν = xµ y ν − xν y µ
I tensori antisimmetrici posseggono una strana proprietà molto utile: sotto rotazioni,
gli elementi A0i , con i = 1, 2, 3, si comportano esattamente come un vettore tridimensionale. Non solo, ma gli elementi (A23 , −A13 , A21 ) si comportano analogamente
come un normale vettore tridimensiale sotto rotazioni. La verifica si può effettuare
moltiplicando esplicitamente la generica matrice antisimmetrica per una delle matrici che effettuano rotazioni lungo uno qualunque degli assi. Se però si effettua una
operazione di parità, ovvero si cambia la direzione di tutti e tre gli assi spaziali (trasformazione a determinante -1, e quindi non appartenenente al gruppo di Lorentz), gli
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
11
elementi A0i cambiano di segno, mentre gli elementi (A23 , −A13 , A21 ) rimangono invariati. Insomma, un tensore antisimmetrico corrisponde, nello spazio tridimensionale,
ad un vettore ed uno pseudovettore, e si può scrivere nella forma:
Aµν
0
Vx
Vy
Vz
−Vx
0
Pz −Py
=
−Vy −Pz
0
Px
−Vz Py −Px
0
Si può moltipicare un vettore per un tensore contraendo due indici, ovvero facendo
in modo che uno di questi sia covariante ed uno controvariante, ponendoli uguali, e
sommando su di essi:
B µ = T µν Vν = Tν µ V ν
Si possono moltiplicare anche due tensori tra di loro:
K µν = T µλ Sλ ν
Il risultato del prodotto di più tensori eseguito secondo queste regole è un altro tensore,
di rango pari al numero di indici liberi.
La traccia di un tensore di rango 2, ottenuta contraendo i due indici tra di loro, è un
invariante:
T r(T ) = T µµ = T 00 + T 11 + T 22 + T 33 = T 00 − T 11 − T 22 − T 33
Insomma, le regole d’oro per lavorare con i tensori sono: quando si contraggono due
indici, uno deve essere in alto ed uno in basso. Dalla contrazione di due indici, si ottiene un tensore di rango inferiore di due unità. A destra e a sinistra di una uguaglianza,
si devono trovare lo stesso numero di indici, con lo stesso nome e nella stessa posizione. Queste regolette ci permettaranno di procedere alla formalizzazione della teoria ella relatività procedendo pressocché alla velocità della luce (senza mai superarla,
ovviamente).
Possiamo osservare, en passant, come le matrici gµν e Λµ ν siano dei tensori (cosa di
per sé non banale). La dimostrazione è lasciata come esercizio.
3.3. Invarianza sotto trasformazioni di Lorentz. A questo punto possiamo capire
cosa vuol dire che le equazioni della meccanica e dell’elettromagnetismo devono essere invarianti sotto trasformazioni di Lorentz: vuol dire che possiamo scriverle in
forma cosiddetta covariante a vista ovvero del tipo: Aµ = B µ , dove Aµ e B µ sono due
quantità fisiche che si trasformano entrambe come quadrivettori. Ovviamente anche le
forme T µν = S µν od anche Aµ = T µν B ν sono forme covarianti, e quindi possibili leggi
fisiche. La cosa importante è che a destra e a sinistra delle equazioni si abbiano oggetti
che si trasformano allo stesso modo da un sistema di riferimento inerziale all’altro.
Adesso possiamo tornare alla fisica, e classificare le quantità che conosciamo in base
alle proprietà di trasformazione.
12
italianISIDORO FERRANTE
3.4. Coordinate, separazione. Il primo quadrivettore con cui avremo a che fare sarà
il vettore posizione, che individua univocamente un evento dello spazio tempo, dato
un particolare riferimento inerziale. Sarà xµ = (ct, ~x). Dati due eventi vicini a e b, e
indicate con xµa e xµb le coordinate dei due eventi, definiamo come separazione tra gli
eventi la differenza tra le due coordinate ∆xµ = xµb − xµa . Sia inoltre tb > ta in quel
particolare riferimento, ovvero a precede b.
Il modulo quadro (con la metrica relativistica) di questo quadrivettore è l’intervallo tra
i due eventi: ∆s2 = ∆xµ ∆xµ = c2 (tb − ta )2 − (~xb −~xa )2 . Questo intervallo può essere
positivo, negativo o nullo.
Se l’intervallo è positivo, allora si dice di tipo tempo. In questo caso esiste un sistema
di riferimento in cui gli eventi a e b avvengono nello stesso
luogo, ma con un certo
q
intervallo di tempo. In questo caso, la quantità ∆τ = ∆s
rappresenta l’intervallo
c2
temporale tra i due eventi. Si può verificare facilmente che in ogni altro sistema di
riferimento la distanza temporale tra i due eventi risulterà maggiore: la quantità ∆τ
costituisce l’intervallo di tempo proprio tra i due eventi a e b. I due eventi possono (ma non debbono necessariamente) essere collegati da un nesso di tipo causale, e
precisamente a è la causa e b l’effetto.
Se l’intervallo è negativo, è detto di tipo spazio. Esiste un sistema di riferimento in cui
i due eventi avvengono nello stesso istante, ma in luoghi diversi. √
In quel sistema di
riferimento, la componente temporale si annulla. La quantità ∆l = −∆s2 costituisce
la distanza propria tra i due eventi. Stavolta i due eventi NON sono collegati da un
nesso causale.
Infine particolare importanza riveste il caso ∆s2 = 0: in questo caso, esiste un raggio
di luce che partendo dall’evento a raggiunge l’evento b : i due eventi sono separati
da un intervallo di tipo luce. Può esistere anche in questo caso un nesso causale tra
l’evento a e l’evento b.
2
4. C INEMATICA .
Si consideri un punto materiale (o particella) che descrive una certa traiettoria nello
spazio. Siamo abituati a descrivere la traiettoria come una curva nello spazio tridimensionale, data da tre equazioni parametriche ~x(t). La descrizione relativistica del
moto della stessa particella non cambia di molto: stavolta abbiamo un quadrivettore
~
xµ (t) = (ct, x(t)).
Rispetto al caso non relativistico, la traiettoria deve soddisfare in
più alla condizione che la velocità risulti inferiore alla velocità della luce. Ovviamente
i valori delle coordinate cambiano a seconda del sistema di riferimento che abbiamo
scelto per descrivere il moto: supponiamo di averne scelto uno in modo assolutamente
casuale ed arbitrario.
4.1. Tempo proprio. Consideriamo due punti della traiettoria, agli istanti t e t + dt.
La separazione tra questi due eventi è uguale a dxµ = (cdt, ~v dt).L’intervallo è ovviamente di tipo temporale, come del resto si osserva calcolandolo esplicitamente:ds 2 =
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
13
F IGURA 4.1. Diagramma spazio temporale del paradosso dei gemelli
ct
ct1
1/2
cdτ =(c2 dt2 −dx2 )
<dt
x
q
2
dt (1 −
L’intervallo di tempo proprio è quindi dτ = dt 1 − vc2 = dt
. Ecco
γ
che si scopre un effetto relativistico che già conoscevamo sotto il nome di dilatazione dei tempi: l’intervallo di tempo misurato da un orologio posto a cavallo del punto
materiale che stiamo studiando risulta più breve dello stesso intervallo misurato in un
qualsiasi altro sistema di riferimento. Supponiamo che la particella passi all’istante
t = 0 dall’origine delle coordinate, e che in quel momento l’orologio solidale con essa
segni l’istante τ = 0. Allora il tempo segnato dall’orologio negli istanti successivi
si otterrà integrando l’elemento dτ lungo tutta la traiettoria. Quindi, ad esempio, se
la particella ripassa dall’origine
delle
coordinate
R t1 spaziali all’istante t1 , il suo orologio
R t1
R t1 dτ
segnerà un tempo τ = 0 dτ = 0 dt dt = 0 γdt > t1 . Questo non è altro che il
paradosso dei gemelli esposto in modo formalmente rigoroso.
2
v2
).
c2
4.2. Velocità. La velocità ordinaria di una particella risulta dal rapporto tra la parte
x
spaziale e quella temporale di un quadrivettore:~v = d~
. Quindi le proprietà di trasfordt
mazione da un sistema di riferimento all’altro non sono per niente ovvie: la velocità
non è un quadrivettore. Per questo motivo, le sue proprietà di trasformazione da un
sistema di riferimento all’altro risultano particolari: per ottenerle, basta scrivere le
trasformazioni di Lorentz in forma differenziale:
dx0
cdt0
dy 0
dz 0
=
=
=
=
γ (dx − βcdt)
γ (cdt − βcdx)
dy
dz
dove β = v0 /c è la velocità di S 0 rispetto ad S, e poi dividere membro a membro:
14
italianISIDORO FERRANTE
dx0
dx − βcdt
vx − v 0
=
=
dt0
dt − βdx/c
1 − vxc2v0
dy 0
dy
vy
=
=
=
0
dt
γ (dt − βdx/c)
γ 1 − vxc2v0
vx0 =
(4.1)
vy0
vz0 =
dz
vz
dz 0
=
=
dt0
γdt − βdx/c
γ 1 − vxc2v0
Si lascia come esercizio la dimostrazione che qualunque siano ~v e v 0 , si ha sempre
|~v 0 | < c, e che se |~v | = c allora anche |~v 0 | = c
4.3. Quadrivelocità. Dividendo invece la separazione infinitesima tra due punti della traiettoria di una particella (quadrivettore) per il corrispondente intervallo di temµ
. Il nome
po proprio (invariante) si ottiene ovviamente un quadrivettore: u µ = dx
dτ
che viene dato a questa quantità fisica è quadrivelocità. Le sue componenti sono:
uµ = (γc, γ~v ). Il concetto di quadrivelocità non scalza quello di semplice velocità di
una particella: infatti, la velocità di un punto materiale risulta facilmente accessibile
alla misurazione, in quanto coinvolge il rapporto tra grandezze misurate nello stesso
sistema di riferimento (mentre l’intervallo di tempo proprio è definito nel sistema di
quiete della particella). Si noti inoltre che la quadrivelocità non risulta definita per un
raggio di luce, in quanto l’intervallo di tempo proprio risulta identicamente uguale a
zero.
Moltiplicando la quadrivelocità per se stessa, si trova facilmente: uµ uµ = γ 2 c2 −
γ 2~v 2 = c2 .
Un esercizio interessante consiste nel ricavare la trasformazione della velocità a partire
dalla quadrivelocità : infatti, se in un sistema di riferimento una particella ha velocità
~v , ed in un altro sistema di riferimento, in moto con velocità ~v 0 rispetto a questo,
ha velocità ~v 0 , allora sarà uµ = (cγ, γ~v ) e u0µ = (cγ 0 , γ 0~v 0 ). Ma d’altro canto u ed
u0 devono essere collegati da una T.L. di velocità ~v0 . Sfruttando queste relazioni, è
possibile trovare la relazione esistente tra ~v e ~v 0
4.4. Quadriaccelerazione. La derivata della quadrivelocità rispetto al tempo proprio
µ
si chiama quadriaccelerazione: aµ = udτ . La quadriaccelerazione ha la particolarità di
essere ortogonale (con la metrica di Minkowsky) alla quadrivelocità: infatti u µ aµ =
µ
2
µ
uµ du
= 12 dudτuµ = 12 dc
= 0. La relazione tra l’accelerazione e la parte spaziale della
dτ
dτ
quadriaccelerazione è piuttosto complicata: si lascia per esercizio la dimostrazione che
i due vettori puntano in lgenerale in direzioni diverse.
5. D INAMICA
La dinamica è la parte più delicata della relatività speciale: infatti è quella parte della teoria in cui i principi della dinamica newtoniana vengono messi in discussione e
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
15
modificati in modo da rimanere consistenti con gli altri postulati della relatività. Ovviamente, in questo come in altri casi, la parola ultima delle modifiche apportate spetta
agli esperimenti, che finora hanno verificato solidamente i risultati ottenuti.
5.1. Massa di quiete. Un primo concetto che vogliamo definire è quello di massa di
quiete di un corpo. Vogliamo che la massa costituisca una proprietà del corpo, che non
dipenda dal sistema di riferimento. Non esistono motivi di principio per cui si debba
effettuare una richiesta del genere: infatti proprietà come il volume, le dimensioni,
anche il colore (vedremo in seguito) possono cambiare da un sistema di riferimento
all’altro, e quindi dipendere dalla velocità del corpo. Del resto, alcuni testi di relatività parlano tranquillamente di massa relativistica di un corpo come dipendente dalla
velocità. Però esistono tutta una serie di ragioni pratiche e teoriche non disprezzabili
che fanno preferire una definizione invariante: ad esempio, le particelle subatomiche
sono caratterizzate da una serie di proprietà che le identificano, ed una di esse è la
massa. Tutti gli elettroni, e i protoni, ad esempio, hanno la stessa massa quando questa viene misurata nel sistema di riferimento in cui essi sono in quiete, e così tutti i
neutroni e tutti i mesoni K, π, e qualunque altro riusciate ad immaginare. Sembra un
delitto mascherare questo fatto della natura utilizzando una definizione di massa che
dipenda dalla velocità. Inoltre, e questo lo vedremo in seguito, la massa a riposo di
una particella fornisce una misura dell’energia interna di legame dei vari costituenti.
La scelta che risulterà alla fine più elegante sarà quella di definire la massa di un corpo
tramite misure effettuate nel suo riferimento di quiete. In questo modo la massa risulta
uno scalare (possiede ovviamente lo stesso valore in ogni sistema di riferimento) , e
può essere misurata tranquillamente adoperando i metodi della meccanica newtoniana,
misurando ad esempio l’accelerazione che il corpo subisce quando viene sottoposto ad
una forza nota, purché le velocità che entrano in gioco nel misuramento risultino molto
piccole.
5.2. Quadriimpulso. Possiamo creare un nuovo tensore moltiplicando la quadrivelocità per la massa a riposo di un corpo:
(5.1)
P µ = muµ = (mcγ, mγ~v )
Concentriamo momentaneamente la nostra attenzione sulla parte spaziale: osserviamo
come a bassa velocità il fattore γ tende ad 1, e quindi la parte spaziale tende alla quantità di moto della particella. Adesso il problema è: la definizione di quantità di moto
newtoniana è corretta, oppure è solamente il limite a bassa velocità della espressione
relativistica8?
Il punto focale è: dato un sistema di due particelle che interagiscono tra di loro, vogliamo che la quantità di moto risulti definita in modo tale che si conservi durante
l’urto. Questa proprietà, dovendo rimanere valida in ogni sistema di riferimento, ci fa
8
In questi appunti, considero sinonimi i termini quantità di moto, impulso e momento della particella
(anche se a stretto rigore il secondo è l’integrale della forza, mentre l’ultimo termine è una cattiva
traduzione dell’inglese momentum) in quanto ormai questo è l’uso corrente.
16
italianISIDORO FERRANTE
F IGURA 5.1. Esempio adoperato per il calcolo della forma relativistica
dell’impulso: supponiamo che le masse siano uguali, e che la componente y dell’impulso totale sia nulla. Allora la massa 1 torna indietro
con la stessa velocità, mentre la massa 2 cambia il segno della componente y. Lo stesso urto, visto nel sistema S 0 che si muove con velocità
v0 , appare praticamente uguale, tranne che per il fatto che le masse 1 e
2 si scambiano il ruolo.
−v
u1
−u1
u2
u2
u1
v
Urto visto in S’
Urto visto in S
immediatamente sospettare che la quantità di moto debba essere la parte spaziale di
un quadrivettore. Per corroborare questa ipotesi, possiamo considerare un urto in due
sistemi di riferimento, scelti in modo che i conti siano particolarmente facili. questo
esempio è adoperato dalla maggior parte dei libri, ma una trattazione più generale si
trova nel libro di Jackson.
Supponiamo allora di trovarci in un sistema di riferimento in cui si ha un urto come in
figura 5.1: le masse siano uguali, e la massa 1 torni indietro dopo l’urto con la stessa
velocità u1 . La massa 2, d’altro canto, prima dell’urto ha una velocità ~v di componenti
vx = v0 , vy = u2 : dopo l’urto, la componente x rimane invariata, mentre quella y
cambia di segno.
Supponiamo di osservare adesso lo stesso urto da un sistema di riferimento S 0 che si
muove con velocità v0 rispetto ad x: stavolta, nel nuovo sistema di riferimento, la
massa 2 avrà una componente x della velocità nulla sia prima che dopo l’urto; al
contrario, la massa 1 avrà sia prima che dopo l’urto una componente x della velocità
pari a vx = −v0 .
In pratica, le due masse si saranno scambiate il ruolo! quindi per simmetria, osservando la figura, possiamo concludere che nel sistema di riferimento S 0 la massa 1 avrà
velocità lungo y pari ad u2 , mentre la massa 1 avrà velocità lungo y uguale a u2 . Ma
le due velocità sono collegate da una trasformazione di Lorentz, ovvero: u 01 = u2 ed
anche u02 = u1 . quindi varrà, applicando le 4.1:
(5.2)
u2 = u01 =
u1
γ
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
17
Passiamo adesso a considerare la quantità di moto: supponiamo inanzitutto che questa
abbia una forma del tipo: P~ = mg(v)~v dove g(v) è una funzione del modulo della
velocità della particella. In entrambi i sistemi, visto che le masse 1 e 2 tornano indietro con la stessa velocità, la componente y della quantità di moto totale deve essere
nulla: quindi deve risultare mg(u1 )u1 = mg(v)u2 . Applicando la relazione 5.2 si
trova:g(u1) = g(v)/γ. Prendendo il limite per piccole velocità, ed osservando che
perché risulti valido il limite newtoniano deve essere g(0) = 1, si trova: g(v) = γ.
5.3. L’energia. Adesso che abbiamo giustificato l’ipotesi che la parte spaziale del
quadriimpulso corrisponda alla quantità di moto, occupiamoci della componente temporale.
Una prima osservazione che possiamo fare è la seguente: noi vogliamo che la quantità
di moto totale si conservi in un urto indipendentemente dal sistema di riferimento dal
quale compiamo la misura. Ma una trasformazione di Lorentz da un sistema di riferimento all’altro comporta mescolamenti tra la parte spaziale e quella temporale: quindi,
se vogliamo che la conservazione sia indipendente dal sitema scelto, allora dobbiamo
concludere che anche la parte temporale rappresenta una quantità conservata.
Per capire di cosa si tratta, facciamo il limite per piccole velocità:
1
1 v2
1 2
2
0
P = mcγ w mc 1 + 2 =
mc + mv
2c
c
2
Come si vede, a parte il termine mc2 , non è altro che l’energia cinetica della particella
divisa per la velocità della luce. Ma cosa significa il termine mc2 ? La tentazione è
quella di attribuirgli il significato di energia posseduta dalla particella in assenza di
velocità. Si tratterebbe quindi di un termine che tiene conto di tutta l’energia interna
della particella. Ma è giustificata una ipotesi di questo tipo? Evidentemente si tratta
di una congettura molto forte, in quanto non esiste assolutamente niente del genere in
meccanica newtoniana!
Ci viene incontro in questa supposizione un argomento molto semplice: immaginiamo
di avere un sistema composto da due masse uguali M tenute ad una distanza L da un
sistema di asticciole rigido (vedi figura 5.2). Da una di queste masse parte una certa
quantità di energia sotto forma di onda elettromagnetica che viene assorbita dall’altra.
Sappiamo che la relazione tra l’energia e l’impulso della radiazione elettromagnetica
è E = cP : quindi, in seguito all’emissione, le due masse rinculano e si muovono in
direzione opposta alla radiazione con velocità v = P/2M . Quando la radiazione viene
assorbita dall’altra massa, dopo un tempo circa L/c, il sistema si trova nuovamente
a riposo: nel frattempo però si è spostato in direzione della massa che ha emesso
l’energia di una quantità ∆x = vL/c = EL/(2M c2 ). D’altro canto, però, per la
conservazione della quantità di moto, la posizione del centro di massa deve essere
rimasta invariata! L’unica possibilità a questo punto è che una piccola quantità di
massa ∆M si sia spostata dal’emettitore all’assorbitore, in maniera che il baricentro
non si trovi più al centro delle due masse, ma si sia spostato verso la massa più pesante
18
italianISIDORO FERRANTE
F IGURA 5.2. Schema dell’esperimento mentale in grado digiustificare l’equivalenza tra massa ed energia: due masse uguali sono connesse
rigidamente a distanza L. Il centro di massa si trova al centro. Dalla
massa di sinistra un fotone di energia E viene emesso verso destra: le
due masse rinculano con velocità v = P/2M . Quando il fotone viene assorbito, dopo un tempot = L/c, il sistema torna in quiete, ma si
è spostato di una quantità ∆x = vt = P L/(2M c). Essendo però il
sistema isolato, il centro di massa deve essere rimasto in quiete: pertanto, si deve supporre che la massa di sinistra abbia perduto una quantità
di massa ∆M e che una uguale quantità sia stata acquisita dall’altra
massa. Imponendo che lo spostamento del centro di massa sia uguale
ed opposto allo spostamento del sistema formato dalle due masse, si
ottiene:∆M = E/c2 .
M
v=P/2M
M−∆ M
M
L
E=cP
∆x
M+ ∆ M
di una quantità ∆x. Insomma, bisogna avere:∆x = ∆M L/2M = EL/(2M c 2 ) ovvero
∆M = E/c2 . Quindi si trova che appunto la variazione di massa dell’emettitore è
uguale all’energia della radiazione emessa diviso la velocità della luce al quadrato!
Ovviamente questo ragionamento è solamente approssimativo, in quanto mescola concetti provenienti dall’elettrodinamica e dalla meccanica newtoniana per giungere ad un
risultato relativistico: un conteggio più accurato porta tuttavia allo stesso risultato.
Siamo quindi autorizzati ad ipotizzare che l’energia di una particella relativistica sia
2
data dalla formula E = √ mc 2 2 . Le conferme sperimentali di questo risultato sono
1−v /c
ormai così tante che non avrebbe senso elencarle tutte: questa formula è adoperata
ormai correntemente in tutti quei calcoli che coinvolgono le particelle all’interno degli
acceleratori che si muovono a velocità molto vicine a quella della luce, e non si sono
mai osservate deviazioni significative.
~ ).
Quindi il quadriimpulso assume definitivamente la forma: P µ = (E/c, P
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
19
Prendendone il quadrato, si ottiene: m2 c2 = E 2 /c2 − P~ 2 od anche E 2 = m2 c4 + c2 P~ 2 .
Nel caso di corpi di massa 0, allora E = c|P~ |.
Inoltre, dal semplice esame delle formule 5.1 che danno energia ed impulso in termini
della velocità, si ricava:
P~ = ~v E/c2
Nel caso m = 0 si trova |~v | = c: le particelle prive di massa possono muoversi
solamente alla velocità della luce!
5.3.1. Urti. Definiamo dapprima il concetto di urto in modo preciso: in un processo
di urto si hanno due corpi non interagenti, ciascuno in moto rettilineo uniforme. I due
corpi vengono portati ad interagire brevemente in una regione limitata di spazio e per
un intervallo di tempo finito, dopo di ché l’interazione cessa e i corpi ricominciano a
viaggiare con velocità costante.
Come abbiamo visto, nell’urto tra due particelle si conserva il quadriimpulso totale:
questo significa che nel trattamento relativistico degli urti l’energia totale si conserva
sempre. La cosa non è in contrasto con l’esperienza quotidiana: infatti, in un urto anelastico, l’energia cinetica dei due corpi coinvolti nella collisione si converte in energia
interna, di legame o di agitazione termica. Questa energia rientra nel calcolo della
massa dei corpi: pertanto, in un urto anelastico relativistico, esiste la possibilità che le
masse delle particelle dopo l’urto (dette anche prodotti di reazione) risultino differenti
da quelle che si avevano prima dell’urto! Nel caso di corpi macroscopici, solitamente
le energie cinetiche in gioco sono cosi’ piccole rispetto alla massa a riposo che una
conversione di energia in massa corrisponde ad un trascurabile aumento della massa,
che passa inosservato, a fronte di una grande perdita di energia cinetica, facilmente
osservabile.
Per una trattazione relativistica completa degli urti dobbiamo allora considerare la
possibilità che le masse cambino.
Avremo quindi 2 particelle, a e b, con masse ma ed mb , prima dell’urto, e quadrimomenti Paµ e Pbµ , prima dell’urto, ed altre due particelle c e d dopo l’urto, con quadrimomenti Pcµ e Pdµ . Se sia la particella a a trasformarsi nella c, o se sia la particella b, è
una questione inessenziale, e sostanzialmente indecidibile, soprattutto se consideriamo
particelle microscopiche. La conservazione del quadriimpulso si scrive nella forma:
Paµ + Pbµ = Pcµ + Pdµ
e contiene sia la conservazione dell’impulso che quella dell’energia.
Una quantità molto utile è il modulo quadro dell’impulso totale, moltiplicato per la
velocità della luce al quadrato:
2
s = c2 (Pa + Pb )µ (Pa + Pb )µ = (Ea + Eb )2 − c2 P~a + P~b
Il significato di questa quantità diventa chiaro calcolandola nel sistema del centro dei
momenti, impropriamente detto spesso anche sistema del centro di massa: infatti si
20
italianISIDORO FERRANTE
F IGURA 5.3. Scattering Compton: un fotone urta contro un elettrone
in quiete; a seguito dell’urto, l’elettrone rincula e il fotone cambia la
sua energia ed il suo impulso.
/home/ferrante/tex/relativita/compton.eps not f
tratta di un invariante, e possiamo calcolarlo dove i conti sono più semplici. Nel sistema del centro di massa, appunto, la somma dei momenti delle particelle è nulla.
Pertanto, la quantità s si riduce al quadrato della somma delle energie delle due particelle nel centro di massa, ovvero più semplicemente il quadrato dell’energia nel centro
di massa. Se si ricorda che l’energia di una particella è sempre maggiore alla sua massa
per c2 , si ottiene che per ottenere due particelle di un tipo dato, condizione necessaria
(ma non sufficente) è che l’energia del centro di massa debba essere maggiore della
somma delle masse dei prodotti finali, moltiplicata per c2 .
Example 5.1. Scattering Compton.
Uno degli esempi più interessanti è l’effetto Compton, che consiste nell’urto di un
fotone con un elettrone in quiete (vedere figura 5.3). Si tratta in questo caso di un
urto elastico, in quanto le masse dei prodotti finali sono uguali a quelle dei prodotti
~ mentre P µ = hν 0 /c(1, k̂),
iniziali. In questo caso, Paµ = hν/c(1, k̂); Pbµ = (me c, 0),
c
µ
Pd = (me γc, me γ~v ).
Le incognite sono sei (le tre componenti dell’impulso per ognuna delle particelle),
mentre le equazioni sono 4. Una incognita è però eliminabile facilmente osservando
che l’impulso iniziale e i due finali giacciono sullo stesso piano: quindi un angolo
di rotazione intorno alla direzione dell’impulso iniziale è arbitrario, e non cambia le
energie delle particelle finali. Dopo essersi ridotti ad un piano, rimangono 4 equazioni
e tre incognite. Una ulteriore quantità rimane indeterminata: assumiamo che sia l’angolo formato tra la direzione del fotone entrante e quella del fotone uscente, ovvero
l’angolo di scattering del fotone.
Allora scriviamo la conservazione del quadriimpulso nella forma:
Pdµ = Paµ + Pbµ − Pcµ
e calcoliamo il prodotto scalare di questa espressione per sè stessa. Ricordiamo che
in base alla definizione Pdµ Pdµ = Pbµ Pbµ = m2e c2 ed inoltre Pcµ Pcµ = Paµ Paµ = 0;
rimangono i doppi prodotti Paµ Pbµ = hνme , Pcµ Pbµ = hν 0 me ed infine Paµ Pcµ =
h2 νν 0
(1 − cos θ). Mettendo assieme tutti i pezzi, si ha:
c2
c
c
h
0
−
=
λ
−
λ
=
(1 − cos θ)
ν0 ν
me c
Example 5.2. Energia di soglia
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
21
Un altro esempio interessante riguarda il concetto di energia di soglia. Si supponga di voler inviare un positrone (Particella avente la stessa massa dell’elettrone, ma
di carica positiva: è l’antiparticella dell’elettrone) contro un elettrone, in modo che
nella reazione finale si ottengano un protone ed un antiprotone (protone con carica negativa). L’ elettrone, inoltre, sia in quiete e il positrone venga sparato addos~i ed energia Ei . L’energia del centro di massa è allora:
so con impulsoq
indidente P
√
√
Ecm = s = (Ei + me c2 ) − P~ 2 = 2Ei me c2 . Perché si possano produrre due
i
m2
protoni, deve risultare Ecm > 2mp c , ovvero 2E i me c2 > 4m2p c4 , ed infine E i > 2 mpe c2 .
2
La massa dell’elettrone è di 9.1 × 10−31 Kg, corrispondente ad una energia a riposo di
circa 8 × 10−14 Joule. La massa del protone è circa 1.7 × 10−27 Kg, pari a circa 1.5 ×
10−10 Joule. Inserendo i numeri, si trova allora che il positrone deve avere un’energia
di 5.5 × 10−7 , ovvero 6.7 milioni di volte maggiore della sua massa a riposo 9.
Se invece elettrone e positrone vengono fatti collidere sparandoli uno contro l’altro con
la stessa velocità ed energia Ei , allora l’energia nel centro di massa è semplicemente
2Ei , e quindi basterà che sia Ei > mp c2 , ovvero l’energia incidente deve essere semplicemente maggiore dell’energia a riposo del protone, pari a circa 1800 volte l’energia a
risposo dell’elettrone, decisamente minore di quella calcolata nel caso precedente. E’
proprio su questo principio che si basa il funzionamento dei collisionatori, od anche,
usando il termine inglese, colliders, in cui le particelle vengono scagliate l’una contro
l’altra con uguale velocità.
5.4. Forze. Il concetto di forza in relatività risulta problematico.
Innanzitutto, si perde il concetto di azione a distanza: se ad esempio considero l’interazione tra due elettroni in moto, allora l’informazione sulla posizione di uno dei
due elettroni giunge all’altro con un ritardo che dipende dalla distanza. Nel frattempo,
il primo elettrone si è spostato e quindi la forza non potrà in principio essere diretta
lungo la congiungente, se non in casi speciali. Viene a mancare così il principio di
azione e reazione, fondamentale nella meccanica newtoniana. In fisica relativistica le
interazioni avvengono non tra corpi, bensì tra i corpi ed il campo (elettrico, magnetico,
gravitazionale, o di altra natura) nelle immediate vicinanze di ogni corpo.
Rimane valido però il principio della conservazione della quantità di moto, a patto di
tenere conto della quantità di moto associata al campo che trasporta l’interazione.
Quale sarà la forma assunta dall’equazione F~ = m~a ? Una ipotesi potrebbe essere
qualcosa del tipo: maµ = F µ , dove F µ è un quadrivettore la cui parte spaziale si riduce alla forza newtoniana nel limite di piccole velocità. Ma questo non ci dice molto:
infatti le forme γ F~ , F~ , F~ /γ si riducono tutte alla forma newtoniana per basse velocità,
e niente ci impedisce di pensarne mille altre. Si rende necessario dare parola all’esperimento: ad esempio, considerando la deflessione di un elettrone a velocità prossima
9
Per confronto, un insetto di massa intorno ad 1 mg, che vola ad una velocità di circa 50 cm/s ha una
energia cinetica di circa 10−4 Joule. La sua energia a riposo, per contro, è di circa 1014 Joule.
22
italianISIDORO FERRANTE
a c in conseguenza di un campo elettrico perpendicolare alla direzione del suo moto;
oppure la relazione tra il raggio e la velocità in una particella che descrive una circonferenza sotto l’azione del campo magnetico. Questi esperimenti danno come risultato
che la parte spaziale del quadrivettore F µ deve essere uguale a γ F~ : con questa scelta,
~
~
si ha tra l’altro che la parte spaziale dell’equazione diventa: ddτP = γ ddtP = γ F~ , per cui
~
si recupera la forma newtoniana ddtP = F~ , dove stavolta P~ è però la versione relativistica della quantità di moto. A dare maggior forma a questa ipotesi, scopriremo più in
là che le equazioni dell’elettrodinamica forniscono esattamente la stessa formula.
Rimane da scoprire cosa sia la componente temporale della quadriforza: per questo, osserviamo che, come abbiamo visto in precedenza, quadriaccelerazione e quadrivelocità sono ortogonali, e quindi lo sono anche quadriimpulso e quadrivelocità:
F µ uµ = 0. Da questa relazione si ottiene: F 0 γc = γ 2 F~ · ~v ovvero:
F0 =
γ dE
γ~
F · ~v =
c
c dt
Quindi la componente temporale della quadriforza è uguale a γ/c volte la derivata
dell’energia della particella, ovvero la potenza sviluppata dalla forza.
Questo risultato rafforza l’identificazione dell’energia cinetica della particella con la
componente temporale del quadriimpulso, e nel contempo l’identificazione della componente spaziale della quadriforza con γ volte la forza newtoniana.
In alcuni testi a questo punto si cerca di ricavare la legge di trasformazione della forza
da un sistema di riferimento all’altro: si tratta di equazioni complicate che non aggiungono niente al contenuto fisico delle equazioni che abbiamo visto. Nel caso in
cui saremo costretti a trasformare una forza da un sistema di riferimento all’altro, ci
basterà sapere che la quadriforza si trasforma come un quadrivettore. E’ il caso di
notare, però, che nel passaggio da un sistema di riferimento all’altro la direzione della
forza cambia, mentre le trasformazioni di Galileo lasciano invariati sia modulo che
direzione!
5.5. La massa relativistica. Alcuni autori introducono il concetto di massa relativistica, o semplicemente massa, di una particella, dicendo che la massa varia con la
velocità secondo la formula: m = √ m02 2 , dove m0 è la massa a riposo, in modo da
1−v /c
scrivere l’energia nella forma E = mc2 . Il guadagno che si ottiene con questa scelta
è quello di poter conservare l’espressione P~ = m~v per la quantità di moto, e quella
di poter considerare la massa una grandezza additiva. A parte questo, la massa relativistica è quasi sempre fonte di grandi confusioni ed è preferibile a giudizio di chi
scrive evitarne l’uso. Rimane da notare che tuttavia molti testi, anche estremamente
qualificati, continuano ad adoperarla.
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
23
6. C AMPI
Un campo tensoriale, del tipo di quelli che interessano noi fisici, è una applicazione
che associa ad ogni evento nello spazio-tempo una quantità di tipo tensoriale.
Il più semplice di tutti è il campo scalare. Nel caso del campo scalare, ad ogni punto
dello spazio quadridimensionale va assegnata una quantità che non cambia sotto trasformazione di Lorentz. Specifichiamo meglio cosa si intende. Sia Φ(x µ ) un campo
scalare. Allora, sotto una trasformazione che porta il quadrivettore x µ nel quadrivettore x0µ , in generale la forma della funzione Φ cambia, diventando Φ 0 , ma in modo tale
che il valore assunto nel punto di coordinate x0µ sia uguale a quello assunto da Φnel
corrispondente punto xµ .
Ovvero:
Φ0 (x0µ ) = Φ(xµ )
In modo analogo è possibile definire un campo quadrivettoriale: stavolta, sotto l’effetto
di una trasformazione di Lorentz, le componenti del quadrivettore cambiano. Ovvero:
V 0µ (x0 ) = Λµ ν V ν (x)
E lo stesso può avvenire con un tensore di grado generico.
Nel seguito, terremo sottintesi gli argomenti delle varie funzioni, sottindendendo che i
campi siano calcolati in un punto dello spazio tempo, le cui coordinate vanno calcolate
nello stesso sistema di riferimento in cui si calcolano le componenti dei tensori.
6.1. Operatori differenziali.
6.1.1. Gradiente. Consideriamo un campo Φ, e calcoliamone il differenziale, ovvero
la variazione lineare per un piccolo spostamento ∆xµ . Si ha:
∆Φ =
∂Φ
∂Φ
∂Φ
∂Φ
∆x0 + 1 ∆x1 + 2 ∆x2 + 3 ∆x3
0
∂x
∂x
∂x
∂x
Ora, sappiamo che ∆Φ è invariante per T.L.; sappiamo anche che ∆x µ è un quadrivettore controvariante. Ma allora le componenti del gradiente di Φ devono costituire un
vettore controvariante!
Possiamo attribuire questa proprietà all’operatore gradiente, definito come:
−
∂
∂
∂
∂
1∂ →
∂µ =
,∇
,
,
,
=
∂x0 ∂x1 ∂x2 ∂x3
c ∂t
.
µν
µ
Moltiplicando
semplicemente per g possiamo trovare l’operatore covariante: ∂ =
→
−
1 ∂
, −∇
c ∂t
24
italianISIDORO FERRANTE
6.1.2. Dalembertiano. Moltiplicando i due operatori covariante e controvariante otteniamo un operatore scalare che ha una sua particolare importanza: si tratta del
cosiddetto Dalembertiano, che ha un suo simbolo particolare: .
1 ∂2
~2
−∇
c2 ∂t2
si riconosce immediatamente in questo operatore quello che compare nelle equazioni
d’onda......
= ∂ µ ∂µ =
6.1.3. Divergenza. La divergenza di un campo quadrivettoriale è definita come:
1 ∂V 0 ~ ~
+ ∇V
c ∂t
Ovviamente si tratta di un invariante. Se la divergenza è zero in un sistema di riferimento, allora lo è dappertutto.
(6.1)
∂µ V µ =
7. L’ ELETTRODINAMICA
E LE EQUAZIONI DI
M AXWELL
7.1. Richiami di elettrodinamica. Siamo pronti a questo punto a scrivere la teoria
relativistica dell’elettrodinamica.
Scopriremo che le equazioni sono già covarianti per trasformazioni di Lorentz, e che
quindi la teoria di Maxwell non richiede alcuna modifica, ma solamente una re-interpretazione
di alcuni risultati.
Partiamo dal ricordare le equazioni di Maxwell. Adoperemo come unità di misura
il sistema gaussiano, una variante del CGS, che permette di scrivere rapidamente le
equazioni senza le complicazioni derivanti dalle costanti 0 e µ0 .
Ricordiamo rapidamente alcune caratteristiche del cgs:
1
(1) La costante 0 vale 4π
. In conseguenza, non esiste una unità di misura propria
della carica, che risulta una grandezza derivata.
. Di conseguenza, i campi elettrici e magnetici hanno le
(2) La costante µ0 vale 4π
c
stesse dimensioni, e si misurano con le stesse unità.
In queste unità di misura, le equazioni di Maxwell diventano:
~ ·E
~
∇
~ ·B
~
∇
~ ×E
~
∇
~ ×B
~
∇
= 4πρ
= 0
~
= − 1c ddtB
= 4π
J~ +
c
~
1 dE
c dt
A cui vanno aggiunte l’equazione di continuità e l’espressione della forza agente su di
una carica:
∂ρ ~ ~
+∇·J =0
∂t
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
~
~ + ~v × B
F~ = q E
c
25
I campi possono essere derivati da un potenziale scalare ed uno vettoriale in base alle
equazioni:
~
~ = −∇φ
~ − 1 ∂A
E
c ∂t
~ = ∇
~ ×A
~
B
I campi scalari e vettoriali non sono definiti completamente da queste relazioni: per
rimuovere l’indeterminatezza si adopera una ulteriore relazione, detta condizione di
gauge. Nella relatività si preferisce adoperare la cosiddetta gauge di Lorentz, che
corrisponde all’equazione:
1 ∂φ ~ ~
+∇·A=0
c ∂t
In questa gauge, le relazioni che legano i potenziali alle sorgenti sono del tipo:
1 ∂2φ ~ 2
− ∇ φ = 4πρ
c2 ∂t2
~
1 ∂2A
~ 2A
~ = 4π J~
−
∇
c2 ∂t2
c
Scrivere queste equazioni in forma covariante a vista sarà poco più che un gioco da
ragazzi.....
7.2. La carica. Partiamo come al solito, da un dato sperimentale: la carica è un invariante. Non esiste un vero esperimento effettuato allo scopo di verificare questa
congettura, ma sostenere il contrario porterebbe a conseguenze facilmente osservabili:
ad esempio, sappiamo che la carica è quantizzata, cosa difficilmente compatibile con
una sua dipendenza dalla velocità, e sappiamo anche che le cariche dell’elettrone e
del protone sono uguali entro una parte su 10−19 . Ma il protone è circa 2000 volte
più pesante dell’elettrone, e conseguentemente più lento: una dipendenza della carica
dalla velocità porterebbe ad uno squilibrio nell’accurata cancellazione tra le cariche
che si osserva quotidianamente. Possiamo quindi assumere tranquillamente che la carica dellélettrone rimanga la stessa quando misurata in sistemi di riferimento inerziali
diversi.
26
italianISIDORO FERRANTE
7.3. Le densità di carica e di corrente. Se la carica si conserva in un sistema di
riferimento, allora si conserva in tutti i sistemi di riferimento: ovvero, l’equazione di
continuità mantiene la sua forma in tutti i sistemi di riferimento.
Se la osserviamo bene, e la confrontiamo con la 6.1 vediamo subito che l’equazione
di continuità non è altro che la divergenza di un campo quadrivettoriale avente come
parte temporale la densità di carica moltiplicata per la veclocità della luce, e come
~
parte spaziale la densità di carica: J µ = (cρ, J)
Questa semplice osservazione ci dice già molto: ci dice, infatti, come si modifica la
densità di carica nel passare da un sistema di riferimento ad un altro: basta applicare
le trasformazioni di Lorentz!
ρ
0
Jx0
Jy0
v = γ ρ − 2 Jx
c
= γ (Jx − vρ)
= Jy
Jz0 = Jz
Facciamo qualche esempio. Supponiamo dapprima di avere, in un sistema di riferimento, una certa densità di carica in quiete ρ0 , e di non avere alcuna corrente elettrica
di nessun tipo.
Allora, in un sistema di riferimento che si muove con velocità vx rispetto a questo, la
densità di carica risulterà aumentata per un fattore γ. La cosa si comprende immediatamente se si pensa ad un parallelepipedo di volume V0 nel sistema originale: all’interno,
si troverà la carica Q = ρV0 .
Nel sistema di riferimento in cui la carica è in moto, il volume in esame si restringerà
di un fattore γ(per la contrazione delle lunghezze): V = V0 /γ. Ma per l’invarianza
della carica, conterrà la stessa carica Q! La densità di carica sarà allora ρ 0 = VQ =
γ VQ0 = γρ. La presenza della densità di corrente nel nuovo sistema di riferimento si
spiega facilmente osservando che in questo la carica si muove con velocità v lungo
l’asse x.
Più difficile risulta comprendere il caso seguente: supponiamo che esista in un sistema
di riferimento una certa densità di corrente J~0 , che per comodità possiamo considerare
diretta lungo l’asse x, e confinata ad esempio all’interno di un filo. Supponiamo che
nello stesso sistema di riferimento non si misurino cariche elettriche libere.
Cambiamo sistema di riferimento passando ad un altro in moto con velocità v parallela
~ nel nuovo sistema di riferimento la densità di corrente vale J 0 = γJ0 , ed inoltre
a J:
appare una densità di carica ρ0 = − cv2 J0 . L’apparizione di una densità di carica elettrica
cambiando sistema di riferimento è abbastanza strana e difficile da spiegare. Proviamo
a darne una spiegazione intuitiva: ipotizziamo, in modo del tutto arbitrario, che la
densità di corrente sia dovuta ad una carica positiva ρ0 che si sposta verso destra con
velocità v, ed una carica negativa che rimane ferma, di valore −ρ 0 . Si osservi che sia
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
27
F IGURA 7.1. Schema per mostrare la trasformazione delle correnti: lo
stesso filo, visto da due sistemi di riferimento diversi. Nel primo caso,
le cariche positive si muovono e quelle negativa rimangono in quiete;
nel secondo avviene l’opposto. Tuttavia, nel primo caso le cariche si
bilanciano perfettamente, mentre nel secondo no.
/home/ferrante/tex/relativita/correnti.eps not fo
ρ0 che v sono arbitrari; l’unico vincolo è che J0 = ρ0 v. Supponiamo di osservare
questo sistema da un sistema di riferimento in moto con velocità v diretta verso destra.
In questo sistema di riferimento, la densità di carica positiva apparirà ferma, e quindi
1/γ volte più piccola di quanto appariva nel primo sistema di riferimento; in contrasto,
la densità di carica negativa adesso appare in moto verso sinistra con velocità v , e
quindi maggiore di un fattore γ.
Quindi la densità di carica totale sarà: ρ0 = ρ0 /γ − γρ0 = γρ0 1−γ
= −γv 2 ρ0 =
γ2
−γvJ0 mentre la densità di corrente sarà dovuta alla carica negativa che si sposta
verso sinistra, e quindi J 0 = γρ0 v = γJ0 .
2
Si ritrovano quindi le espressioni ottenute direttamente tramite trasformazione di Lorentz.
7.4. I potenziali. Passiamo ad osservare adesso le equazioni dei potenziali.
Stavolta è immediato osservare come queste equazioni risultano covarianti, una volta
che si è assunto che il quadrivettore formato da una componente temporale pari a φ ed
~ Aµ = (φ, A).
~
una spaziale uguale ad A:
Abbiamo fatto già un bel po’ di passi avanti: sappiamo adesso che se in un sistema
di riferimento conosciamo i potenziali, automaticamente sappiamo calcolarli in ogni
sistema di riferimento.
7.5. I campi elettrici e magnetici e il tensore elettromagnetico. Passiamo adesso
ad esaminare le equazioni che dai potenziali portano ai campi.
Esaminiamole in dettaglio, ad esempio quella che consente di trovare la componente z
del campo magnetico e la componente xdel campo elettrico:
y
x
− ∂A
Bz = ∂A
∂x
∂y
x
− 1c ∂A
Ex = − ∂φ
∂x
∂t
Possiamo notare come la parte destra delle equazioni è della forma ∂ µ Aν − ∂ ν Aµ :
come si vede, si tratta di un tensore antisimmetrico!
28
italianISIDORO FERRANTE
Si trova allora che le componenti del campo elettrico e magnetico altro non sono che
le componenti di un tensore antisimmetrico di rango 2... una conclusione per lo meno
inaspettata!
Il tensore antisimmetrico che prende il posto dei campi elettrici e magnetico assume la
forma seguente:
F µν
0 −Ex −Ey −Ez
Ex
0
−Bz By
= ∂ µ Aν − ∂ ν Aµ =
Ey Bz
0
−Bx
Ez −By Bx
0
a questo punto, come ulteriore regalo, siamo in grado di conoscere le leggi di trasformazione dei campi elettrici! Infatti, basta moltiplicare per due matrici Λ!
F 0µν = Λλµ Λκν F λκ
Questa espressione è molto carina e molto compatta, però non soddisfa del tutto i
fisici, soprattutto quelli sperimentali, che preferiscono avere visione diretta dei campi
elettrici e magnetici. Esplicitando rispetto ai campi, si ottiene allora che in un sistema
di riferimento che viaggia lungo l’asse x con velocità ~v i campi elettrici e magnetici
assumono la forma:
(7.1)
Ey0
Ez0
Ex0 = Ex
Bx0 = Bx
0
= γ (Ey − βBz ) By = γ (By + βEz )
= γ (Ez + βBy ) Bz0 = γ (Bz − βEy )
Quindi si ha che la componente dei campi parallela alla direzione di moto non viene
alterata, mentre le componenti trasverse subiscono dei mescolamenti. In particolare, se
in un sistema di riferimento inerziale si ha esclusivamente un campo elettrico statico,
in qualunque altro sistema di riferimento si ha anche un campo magnetico.
Ricordiamo, en passant, come i campi vadano calcolati nello stesso punto dello spazio
tempo: e quindi, se nel sistema di riferimento originario, si adoperano le coordinate
xµ , allora nel nuovo sistema di riferimento sarà il caso di passare alle nuove coordinate
tramite la trasformazione x0µ = Λν µ .
Notiamo come a partire dal tensore elettromagnetico siamo in grado di calcolare ben
~2 − B
~ 2 ed
due quantità invarianti: si dimostra facilmente infatti come le quantità E
~ ·B
~ rimangono inalterate dopo avere applicato le 7.1. Si verifica anche come la priE
ma espressione corrisponda alla quantità esplicitamente invariante F µν Fµν , mentre la
seconda a αβγδ Fαβ Fγδ , dove αβγδ è un tensore che cambia di segno per ogni scambio
di indici, e la cui componente 1234 vale 1.
~ ·B
~ ci dice ad esempio che se in un sistema di riferimento i campi
L’invarianza di E
elettrici e magnetici sono ortogonali dappertutto, allora lo stesso succede in qualsiasi
altro sistema di riferimento.
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
29
Inoltre, se in un sistema di riferimento il campo elettrico o magnetico sono nulli, allora
in ogni altro sistema di riferimento i due campi sono ortogonali tra di loro.
~2 − B
~ 2 ci dice che se in un sistema di riferimento in un determinato
L’invarianza di E
punto ed istante, il campo elettrico risulta maggiore di quello magnetico, allora esiste
un sistema di riferimento in cui si riesce ad annullare il campo magnetico.
Inoltre, se i moduli dei campi elettrici e magnetici sono uguali tra di loro, allora lo
stesso succederà in ogni sistema di riferimento.
Example 7.1. Condensatore in moto
Come esempio delle trasformazioni dei campi, consideriamo il caso di due piani parallei carichi uniformemente con densità ±σ (praticamente, un condensatore). Sappiamo che tra i due piani il campo elettrico è perpendicolare alle due superfici, e vale
E = 4πσ.
Supponiamo adesso che il condensatore si muova con velocità v ortogonale ai due
piani, e quindi parallela al campo elettrico. Come si sa, la contrazione di Lorentz non
agisce sulle distanze perpendicolari alla direzione del moto: pertanto, il condensatore
apparirà leggermente schiacciato, ma non vi saranno cambiamenti nella ditribuzione
di carica. Il campo allora apparirà invariato: è esattamente quello che ci aspettiamo
dalle leggi di trasformazioni dei campi.
Supponiamo adesso che il condensatore si muova con velocità parallela ai piani e perpendicolare al campo elettrico: stavolta, le lastre appariranno contratte in direzione
parallela al moto, e quindi la densità di carica apparirà maggiore di un fattore γ: corrispondentemente, l’intensità del campo elettrico apparirà aumentata di un fattore γ,
nuovamente in accordo con le leggi di trasformazione.
Inoltre, le due densità di carica con il loro moto produrranno una densità di corrente
superficiale J~s = γσ~v . Sappiamo che una distribuzione di corrente di questo tipo produce un campo magnetico parallelo alle due superfici, ed ortogonale a J~s , di intensità
B = 4π
J = 4π
γσv = γ vc E: nuovamente, si trova un risultato in accordo con le leggi
c s
c
di trasformazioni dei campi
Carica puntiforme in moto con velocità costante ~v
Vogliamo calcolare il campo elettrico prodotto da una carica in moto rettilineo uniforme con velocità ~v diretta lungo l’asse x. Supponiamo, per semplicità, che la carica
passi per l’origine delle coordinate all’istante t = 0, e calcoliamo il campo proprio
in quell’istante, in cui si ha anche t0 = 0. Allora, la relazione tra le coordinate ~x nel
sistema del laboratorio e le coordinate ~x0 nel sistema in cui si muove sono date da:
x0 = γx, y = y, z 0 = z.p
Nel sistema di riferimento in cui la carica è in quiete, si ha
ˆ
r0
1
0
0
~
E = 4πc q r02 , dove r = x02 + y 02 + z 02 .
30
italianISIDORO FERRANTE
~ ottenibile tramite le leggi di
Nel sistema del laboratorio, invece, si ha un campo E
trasformazione 7.1:
x0
γx
Ex = Ex0 = q
=q
3/2
02
02
02
2
2
(x + y + z )
(γ x + y 2 + z 2 )3/2
γy
y0
=q
Ey = γEy0 = γq
3/2
(x02 + y 02 + z 02 )
(γ 2 x2 + y 2 + z 2 )3/2
γz
z0
=q
Ez = γEz0 = γq
3/2
(x02 + y 02 + z 02 )
(γ 2 x2 + y 2 + z 2 )3/2
Un esame approfondito di queste espressioni mostra che il campo rimane radiale, ma
rispetto a quello della carica ferma nell’origine delle coordinate diminuisce di un fattore 1/γ 2 sull’asse delle x, mentre aumenta di un fattore γ sul piano yz: quindi, contrariamente a quanto sembra derivare dalle equazioni di trasformazione, la componente
parallela alla velocità non rimane invariata, perché le distanze vengono contratte di un
fattore γ.
Infine si calcola il campo magnetico, ottenendo:
~
~ = ~v × E
B
c
Il campo magnietico risulta quindi ortogonale sia al campo elettrico che alla velocità;
le linee di forza sono anelli concentrici all’asse x
7.6. Equazioni di Maxwell. Scrivere le equazioni di Maxwell in forma covariante è
un semplicissimo esercizio di trascrizione.
~ ·E
~ = 4πρ.
Partiamo dalle equazioni contenenti i termini di sorgenti. Ad esempio, ∇
Utilizzando i simboli definiti in precedenza, questa diventa:∂1F 01 + ∂2 F 02 + ∂3 F 03 =
4π 0
J
c
~ ×B
~ = 4π J~ + 1 ∂ E~ diventa
La componente x dell’equazione contenente la corrente ∇
c
c ∂t
1
10
invece: ∂2 F 12 + ∂3 F 13 = 4π
J
−
∂
F
.
Si
verifica
immediatamente
che
è possibile
0
c
scrivere queste due e le altre equazioni nella forma:
∂µ F µν =
4π µ
J
c
Un po’ più di lavoro richiede la trascrizione delle altre due equazioni di Lorentz: ad
~ ×E
~ = − 1 ∂ B~ diventa ∂ 2 F 03 + ∂ 3 F 20 + ∂ 0 F 32 = 0.
esempio la componente x di ∇
c ∂t
~ B
~ = 0 diventa ∂ 1 F 23 +∂ 2 F 13 +∂ 3 F 12 = 0. Ci si convince
Similmente, l’equazione ∇·
rapidamente che l’equazione
∂ µ F νλ + ∂ ν F λµ + ∂ λ F µν = 0
contiene tutte e due le equazioni di Maxwell rimanenti.
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
31
7.7. Forza di Lorentz. Rimane un’ultima equazione da analizzare: si tratta dell’equazione che dà la forza su di una particella carica.
~ Ovvero, il
~ v , γ(E+
~ ~v ×B))
Una verifica rapida permette di appurare che: F µν uν = (γ E~
c
quadrivettore ottenuto moltiplicando il tensore elettromagnetico con la quadrivelocità
ha una parte spaziale che è γ volte la forza di Lorentz, mentre la sua parte temporale
altro non è che γ volte la potenza acquistata dalla carica. Insomma, il cerchio si chiude:
basta equagliare questa espressione con la derivata covariante della quantità di moto
per ottenere l’espressione relativisticamente invariante dell’equazione del moto di una
carica elettrica in un campo elettrico esterno:
dpµ
= eF µν uν
dτ
Possiamo studiare due casi, particolarmente semplici: il moto in un campo elettrico o
megnetico uniformi.
Example 7.2. Campo elettrico costante ed uniforme
In questo caso le equazioni del moto assumono la forma particolarmente semplice:
dP~
~
= qE
dt
e quindi:
~
P~ = P~0 + q Et
L’energia allora varia secondo la formula:
2
~
E 2 = m2 c4 γ 2 = c2 P 2 + m2 c4 = c2 P~0 + q Et
+ m 2 c4
da cui si ricava la velocità (per semplicità, supponiamo la carica ferma all’istante t=0):
2
~
qE
q Et
t
1
2
mc
γ =
=
+ 1 → v = c r
2
2
v2
m c
2
1 − c2
qE 2
1 + mc
t
Si nota che per tempi piccoli, e quindi basse velocità, si ritrova la formula newtoniana.
A tempi grandi, e quindi ad alte velocità, la velocità tende invece a c, ma senza mai
superarla.
Un caso interessante si ha quando si spara in campo elettrico orientato in direzione x
una carica con velocità iniziale diretta lungo y.
Allora si possono esplicitare le due componenti della quantità di moto, ottenendo:
Py = P0 = mγvy
Px = qEt = mγvx
32
italianISIDORO FERRANTE
La tangente dell’angolo tra la velocità e il campo elettrico varia linearmente secondo la
stessa legge del caso non relativistico: tan θx = qEt/P0 , però la componente y della
velocità, anzicché aumentare, diminuisce! Infatti l’energia vale:
v
u
2 !
u
qEt
E = mγc2 = mc2 t 1 + P02 /(mc)2 +
mc
da cui, sostituendo γ,si trova:
vx = r
vy = r
qEt
1 + P02 /(mc)2 +
P0 /m
1+
P02 /(mc)2
+
qEt 2
mc
qEt 2
mc
Il calcolo della traiettoria tramite integrazione rispetto al tempo è lasciato come esercizio.
Example 7.3. Campo magnetico costante ed uniforme
Il caso di un campo magnetico uniforme si riesce a risolvere facilmente:
~v
dP~
~
=q ×B
dt
c
Ora, osservando come F~ · ~v = 0 anche nel caso relativistico, dobbiamo dedurre che
l’energia, e quindi γ, e infine anche il modulo della velocità rimangano costanti.
L’equazione del moto diventa allora:
~v
d~v
~
=q ×B
mγ
dt
c
La soluzione di questa equazione è un vettore ~v rotante in senso orario (se q è po~ con velocità angolare ω =
sitiva, antiorario altrimenti) intorno alla direzione di B
qB
. A parte il fattore c, dovuto all’uso del sistema cgs, questa espressione differisce
mcγ
dall’espressione solita della frequenza di Larmor per un fattore γ al denominatore.
La traiettoria corrisponde all’elica del caso non relativistico, dove però stavolta la reqB
lazione tra raggio e componente trasversa della velocità è data da: v T = ωR = mcγ
R,
2πmcγ
2π
mentre il passo dell’elica è d = vk ω = vk qB . Si noti che in termini del momento
della particella, le relazioni rimangono identiche a quelle del caso classico: R = mc
P ,
qB T
2πmc
d = Pk qB .
Example 7.4. Campi elettrico e magnetico ortogonale
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
33
Un campo elettromagnetico in cui le componenti elettriche e magnetiche risultino ortoganali in ogni punto dello spazio non è un caso strano, bensì è quello che si ottiene normalmente osservando un campo elettroco o magnetico statico da un differente
sistema di riferimento inerziale.
Pertanto, questo caso è riconducibile facilmente ad uno dei due precedenti: infatti,
~ ·B
~ = 0, è possibile trovare un sistema di riferimento in cui il campo
visto che E
magnetico o elettrico si annullino, a seconda che risulti E 2 − B 2 maggiore o minore
di zero.
Il caso E 2 = B 2 richiede invece un trattamento a parte.
7.8. Onde elettromagnetiche. L’equazione delle onde, applicata al tensore elettromagnetico, non crea nessun problema in quanto è invariante a vista:
F µν = 0
alla stessa maniera non creano problemi le espressioni delle onde piane monocromatiche, che richiamiamo per comodità:
~ = E~0 e−i(ωt−~k~x) , B
~ = k̂ × E
~
E
Ricordiamo che per soddisfare alle equazioni di Maxwell nel vuoto, ~kdeve essere
ortogonale sia a B che ad E.
Come si fa a trasformare questa equazione in una equazione invariante a vista? Semplice: si costruisce in quadrivettore k µ = ( ωc , ~k).
L’equazione diventa immediatamente:
F µν = F̃ µν e−ik
µx
µ
dove F̃ µν indica un tensore costante ed uniforme nello spazio: di nuovo, un’equazione
covariante a vista!
Le equazioni di Maxwell portano a due condizioni su k µ : la prima deriva dalla divergenza del tensore elettromagnetico, ed è: kµ F µν = 0: questa condizione porta
~ La seconda
~ nonchè alla relazione ~k × B
~ = − ω E.
all’ortogonalità di ~k ed il campi E,
c
~ = 0 e ~k × E
~ = ω B.
~
equazione, porta invece alle condizioni ~k · B
c
Lavorando con queste equazioni, si giunge alle condizioni su k µ : k µ kµ = 0, ovvero:
ω2
− ~k 2 = 0: insomma, viene fuori la solita relazione ben consociuta tra il modulo di
c2
~k e la frequenza ω,ovvero k = ω , o anche, visto che k = 2π , λ = ν/c.10
c
λ
10Una piccola incursione nella meccanica quantistica:
sappiamo che l’energia di un fotone è E = ~ω,
mentre la sua uantità di moto è P = ~~k. Utilizzando la notazione relativistica, si ha: P µ = ~k µ , che è
una espressione covariante a vista.
34
italianISIDORO FERRANTE
Inoltre si può giungere alla dimostrazione che i due invarianti già visti sono entrambi
nulli: ovvero, i campi sono ortogonali e i moduli dei campi elettrico e magnetico sono
uguali.
Insomma, troviamo che tutte le caratteristiche delle onde elettromagnetiche sono invarianti per trasformazioni di Lorentz: un’onda elettromagnetica monocromatica piana
rimane un’onda eletromagnetica piana vista in qualsiasi sistema di riferimento.
Le condizioni che l’onda sia monocromatica e piana in realtà sono superflue: l’equazione delle onde, essendo invariante per trasformazione di Lorentz, ci riporta indietro
al punto da cui siamo partiti:ci dice infatti che la velocità della luce è indipendente dal
sistema di riferimento.
Ma adesso abbiamo una ulteriore informazione preziosa: sappiamo adesso come si
trasformano i vettori ~k e la frequenza ωda un sistema di riferimento all’altro!
Infatti, applicando una T.L. diretta lungo l’asse xotteniamo:
ω 0 = γ(ω − vkx )
kx0 = γ(kx − cv2 ω)
ky0 =
ky
0
kz =
kz
Vediamo una conseguenza di questa equazione: supponiamo che in un certo sistema di
riferimento noi misuriamo una certa frequenza ωe che questa frequenza derivi da una
direzione ~k. Supponiamo che la sorgente di questa radiazione si muova con velocità ~v
lungo una direzione nota, che arbitrariamente decidiamo essere la direzione x. Allora,
dalle equazioni precedenti, siamo in grado di ricostruire la frequenza e la direzione nel
sistema di riferimento in cui la sorgente è in quiete, ovvero la frequenza e direzione di
emissione.
In particolare, si ha: ω 0 = γ(ω − vc ω cos θ), dove θ è l’angolo tra la direzione di
osservazione e la velocità della sorgente.
Di solito l’equazione si scrive nella forma:
ω=
ω0
1
v
γ 1 − c cos θ
Questa equazione assomiglia molto a quella dell’effetto Doppler, ma contiene un termine γ aggiuntivo: in particolare, si ottiene che se si osserva una sorgente ad angolo
retto (cos θ = 0), allora la freuqenza dell’onda elettromagnetica risulta minore di quella di emissione di un fattore γ! Si tratta di quello che viene comunemente definito
effetto Doppler trasverso, e che è stato misurato in esperimenti a terra effettuati su
di una piattaforma rotante. L’effetto Doppler trasverso è una conseguenza della dilatazione relativistica dei tempi: infatti sappiamo che un orologio posto sulla sorgente
scandisce il tempo più lentamente di un orologio solidale con l’osservatore. Ed infatti,
la frequenza emessa risulta diminuita esattamente di un fattore γ!
italianIL FORMALISMO COVARIANTE NELLA TEORIA DELLA RELATIVITÀ RISTRETTA
35
Un altro effetto estremamente interessante che segue dalle regole di t rasformazione
del quadrivettore k µ è che la direzione di propagazione dell’onda cambi nel passaggio
da un sistema di riferimento all’altro: si tratta del fenomeno dell’aberrazione della
luce, che non risulta spiegabile in termini della relatività galileiana.
Si ha ad esempio:
cos θ 0 − vc
γ (kx − βω)
kx0
0
=
cos θ = 0 =
ω
γ (ω − βkx )
1 − vc cos θ 0
e si verifica che per velocità piccole rispetto a quelle della luce si ottiene la formula
classica dell’aberrazione ∆θ = vc sin θ