ALMA MATER STUDIORUM
•
UNIVERSITÁ DI BOLOGNA
Facoltà di Scienze Matematiche, Fisiche e Naturali
Corso di Laurea Triennale in Fisica
MISURE DI RESISTIVITÀ NELLE MRPC DEL
RIVELATORE DI TEMPO DI VOLO
DELL’ESPERIMENTO ALICE
Relatore:
Candidato:
Prof.
Maurizio BASILE
Alessandro SILENZI
II sessione di Laurea
Anno Accademico 2003-2004
i
Sommario
1. Introduzione
1.1
1
L’esperimento ALICE………………..…………………… 1
1.1.1 Una sfida tecnologica………………..……………………. 1
1.2
L’apparato di rivelazione dell’esperimento ALICE ..…….. 2
1.3
L’identificazione delle particelle nell’esperimento ALICE
1.4
Il TOF ..………………………………………………….... 3
3
1.4.1 Specifiche richieste al TOF ..……………………………... 3
2. Lo sviluppo del TOF
5
2.1
La scelta di un rivelatore a gas ..………………………….
5
2.2
La scelta delle MRPC..……………………………………
5
2.2.1 Il contatore Pestov..……………………………………….
5
2.2.2 La PPC..…………………………………………………...
6
2.2.3 La MRPC ………………………………………………..
7
2.3
Lo sviluppo delle MRPC ..………………………………..
2.4
Descrizione delle “strips” di MRPC ..……………………… 8
3. Misure di resistività
7
10
3.1
Caratteristiche minime degli elettrodi ……………..……..
11
3.2
Strumenti di misura di resistività ..……………………….
13
3.2.1 Il picoamperometro con interfaccia ………………………
16
3.2.2 Schema elettrico del “set-up” sperimentale ……………….. 16
3.3
Software di acquisizione …………………………………
17
3.4
Ripetibilità e incertezze ………………………………….
18
3.4.1 Operazioni standard di misura ……………………………
19
ii
4.
5.
Caratteristiche resistive degli elettrodi
20
4.1
Composizione chimica della vernice resistiva ...….……...
20
4.2
Uniformità e valor medio della resistività ……………….
21
4.3
Assestamento delle caratteristiche della vernice …………
23
4.4
Assestamento tramite trattamento termico .………………
24
Conclusioni
Bibliografia
25
26
1
1.
Introduzione
Lo scopo di questa relazione è quello di sviluppare un metodo “rapido” per
la misura della resistività superficiale degli elettrodi nelle MRPC del
rivelatore di tempo di volo (TOF) dell’esperimento ALICE, e verificare
alcune caratteristiche di questi riscontrate con sistemi di misura precedenti.
Una prima parte descrittiva porterà l’attenzione dal generale al particolare
per coinvolgere argomenti via via più specifici dell’attività in laboratorio.
1.1
L’esperimento ALICE
ALICE è un esperimento attualmente in fase di costruzione presso i
laboratori del CERN di Ginevra che si propone di investigare il
deconfinamento e il ripristino della simmetria fra quark studiando eventi
prodotti dalla collisione fra ioni pesanti, in particolare Pb-Pb con energia
nel sistema del centro di massa di circa 5.5 TeV per coppia di nucleoni.
Una collisione di questa energia realizza le condizioni di temperatura e
densità elevatissime tipiche degli attimi successivi al big bang permettendo
la formazione di uno stato della materia nucleare: il Quark-Gluon Plasma
(QGP). Stando ai modelli ipotizzati sulla base del modello standard, questo
“nuovo” stato della materia nucleare, è esistito nei primi 10 milionesimi di
secondo del big bang ed è presente nelle stelle di neutroni super dense e
consiste nella presenza di quark e gluoni liberi.
1.1.1
Una sfida tecnologica
É possibile sapere se si è verificato un evento di creazione di QGP dalla
misura delle particelle prodotte e dei rapporti fra le popolazioni delle varie
famiglie di particelle.
Nell’esperimento, l’ostacolo maggiore è rappresentato dal numero di
particelle che saranno prodotte: 8000 particelle cariche per unità di rapidità.
2
La grande densità di tracce e la piccola granularità dello spazio delle fasi
richiesta rappresenta la più grande sfida tecnologica nella progettazione di
ALICE. Il rivelatore efficace deve avere la capacità di identificare il tipo di
particella (massa e carica elettrica) e misurarne l’impulso, in modo tale da
ottenere informazioni sul QGP e la termodinamica QCD (Quantum
Chromo-Dynamics) per ogni evento in ALICE.
1.2
L’apparato di rivelazione dell’esperimento ALICE
L’apparato di rivelazione, denominato anch’esso ALICE, è composto di
diverse parti. La parte centrale si sviluppa attorno al punto dove avviene la
collisione fra i due nuclei di piombo e possiamo elencare i vari componenti
partendo dal centro verso l’esterno:
ITS (Inner Tracking System) un sistema di rivelatori a semiconduttore in
grado di rivelare le tracce con risoluzioni spaziali dell’ordine del
micrometro;
TPC (Time Projection Chamber) scelta obbligata dalla necessità di avere
un grande numero di punti per ogni traccia, in modo da poter separare il
grande numero di tracce, ottenere informazioni sulla lunghezza della
traiettoria, sulla curvatura di quest’ultima ecc.
I due rivelatori si trovano all’interno del magnete L3 con un “debole campo
magnetico di 0,2÷0,5 T.
All’esterno di questo troviamo il TRD (Transition Radiation Detector), il
TOF (Time Of Flight), del quale parlerò in seguito e due rivelatori di area
ridotta: il PHOS (PHOton Spectrometer) un calorimetro elettromagnetico e
il HMPID (High Momentum Particle IDentification) composto da contatori
RICH (Ring-Imaging CHerenkov).
In aggiunta alla parte centrale di ALICE ci sono il Forward muon
spectrometer, i calorimetri PMD e ZDC e rivelatori a piccolissimo angolo
polare (Vo,To).
3
1.3 L’identificazione
delle
particelle
nell’esperimento
ALICE
L’identificazione delle particella permette di studiare separatamente le
caratteristiche di pioni, kaoni, protoni, ed elettroni o muoni. Tre rivelatori
di ALICE sono progettati esclusivamente per l’identificazione delle
particelle (PID) : il TRD, il TOF e l’HMPID. Il primo è riservato
all’identificazione degli elettroni, il secondo è in grado di riconoscere
particelle con impulso compreso tra 0,5 GeV/c e 2,5 GeV/c, il terzo a
particelle di impulso superiore ai 2,5 GeV/c. L’identificazione di particelle
di impulso inferiore a 0,5 GeV/c è prerogativa dei rivelatori interni (ITS e
TPC).
1.4
Il TOF
1.4.1 Specifiche richieste al TOF
Il TOF è posto a 3,7m di distanza dal punto di collisione, deve coprire un
angolo solido di 2 2π sterad (angolo polare =[45°,-45°] e angolo
azimutale=[0°,360°]) e un area attiva complessiva di ~150 m2. Il TOF è
preposto all’identificazione delle particelle di impulsi compresi fra 0,5 GeV
e 2,5 GeV. Dando uno sguardo alla formula per calcolare la massa di una
particella:
m = p c2
t2
−1
l2
(1.1)
dove m è la massa della particella, t è il tempo di volo e l è la lunghezza
della traiettoria misurata accuratamente con la TPC, c la velocità della luce,
possiamo facilmente ricavare i contributi alla risoluzione temporale:
∂m ∂t E
=
m
t m
2
;
∂m ∂l E
=
m
l m
2
;
∂m ∂p
=
.
m
p
(1.2)
4
Per particelle di energia relativamente grande il terzo contributo risulta
trascurabile rispetto gli altri due. La misura del tempo di volo è prerogativa
del TOF; ad esso viene richiesta una risoluzione temporale intrinseca
migliore di 90ps e una risoluzione complessiva migliore di 150ps tenendo
conto di tutte le sorgenti di errori.
fig.1.1: Il grafico illustra la capacità di separazione di un sistema di tempo
di volo posto a 3,7m dalla sorgente in funzione dell’impulso e della
risoluzione temporale
5
2.
Sviluppo del TOF
Il processo di ricerca e sviluppo del TOF sarà descritto solo nell’ambito del
rivelatore, lasciando la descrizione della parte elettronica del TOF,
altrettanto fondamentale, ad altre fonti.
2.1
La scelta di un rivelatore a gas
La grande superficie del TOF impone dei costi produttivi per il singolo
rivelatore molto bassi. Le specifiche richieste dal progetto sono state
ottenute in passato con sistemi di tipo scintillatore-fototubo, ma il costo di
un TOF basato su questa tecnologia è decisamente proibitivo. I rivelatori a
gas a facce piane parallele, grazie al campo elettrico uniforme che li
caratterizza, forniscono un segnale immediato alla formazione di coppie
elettrone-ione nel “gap” e questo li rende i candidati ideali per la
costruzione del TOF. I candidati a questo scopo sono tre : il contatore di
Pestov (Pestov Spark Counter), la PPC (Parallel Plate Chamber) e la
MRPC.
2.2
La scelta delle MRPC
2.2.1
Il contatore di Pestov
Il contatore Pestov è un rivelatore a “gap” singolo che registra il passaggio
di una particella carica tramite la creazione di uno “streamer”, questo
genera un ritardo dovuto alla transizione nel meccanismo di scarica nel gas
da un regime di valanga Townsend ad un regime di scintilla. Il suddetto
ritardo non è costante, ma ha una variabilità che influenza negativamente la
risoluzione temporale; per migliorare la risoluzione temporale occorre
aumentare la pressione del gas, riducendo il cammino libero medio e
accelerando il processo di creazione dello “streamer”. Un esempio di
6
contatore Pestov per un sistema di tempo di volo è composto da elettrodi
metallici piani paralleli distanti 100µm ed ha un’area di pochi cm2, le
dimensioni sono limitate per non consentire lo sviluppo di scariche con
energia sufficiente a danneggiare gli elettrodi. Il contatore Pestov ha un
tempo morto di conteggio superiore al ms, tempo necessario a rimuovere
dal gap gli ioni creati (tempo morto dipendente dalla miscela di gas).
Sostituendo l’anodo metallico con uno resistivo (vetro semiconduttivo) e
aggiungendo al gas una miscela fotoassorbente è possibile localizzare
spazialmente la scarica e gli effetti di questa sulla tensione dell’anodo; la
tensione cala drasticamente solo dove è presente la scintilla lasciando il
resto dello strumento sensibile al passaggio delle particelle e aumentando
notevolmente il “rate” di acquisizione dello strumento. Nonostante il
processo di sviluppo, il rivelatore presenta un “rumore di fondo” ovvero di
conteggi in assenza di sorgente radioattiva nel caso di tensioni di lavoro
alte e code temporali non gaussiane nel caso di una tensione di lavoro
bassa. In entrambi i casi la pressione del gas interno ad un contatore di
Pestov con la risoluzione temporale richiesta al TOF è 12 bar, il cui
mantenimento su un volume simile a quello occupato dal sistema TOF,
grava sull’energia necessaria al funzionamento del rivelatore ALICE.
2.2.2
La PPC
Una PPC è un rivelatore a “gap” singolo che opera in regime di valanga, è
normalmente composto di due elettrodi metallici, o ricoperti di metallo,
piani e paralleli distanti 0,5÷2 mm. L’uso delle PPC dà diversi problemi dal
punto di vista tecnico: la larghezza del gap necessita una precisione di
10µm, così come la planarità delle superfici. Dal punto di vista delle
prestazioni la piccola funzione lavoro del metallo abbassa notevolmente il
rapporto segnale-rumore, inoltre il segnale è piccolo( 100 fC).
7
2.2.3
MRPC
Le RPCs (Resistive Plate Chambers) sono camere piane parallele a singolo
“gap” con elettrodi resistivi che presentano diversi vantaggi rispetto alle
PPC, ad esempio il rapporto segnale-rumore delle RPC è più grande di
quello delle PPC. Sono stati prodotti dei prototipi di RPCs con un “gap” di
6÷8mm dette Wide Gap RPC nelle quali la distanza fra gli elettrodi ha una
tolleranza maggiore e il “rate” di acquisizione 10 volte maggiore rispetto
alle RPCs con “gap” di 2mm che, per contro, hanno una migliore
risoluzione temporale. La ricerca ha sviluppato un rivelatore che riassume
le caratteristiche positive dell’uno e dell’altro tipo di RPC, tramite la
suddivisione del “gap” in sotto-gaps con dei setti a potenziale elettrico
fluttuante, da cui il nome MRPC (Multigap Resistive Plate Chamber).
Il vantaggio della creazione di più “gaps” è quello di conservare i pregi
dell’una e dell’altra soluzione: è possibile ottenere una buona risoluzione
temporale e rate di acquisizione senza dover ridurre il volume di gas
sensibile o “appensantirlo” con una maggiore quantità di freon.
La MRPC è, quindi, un rivelatore a stato gassoso con “gap” multiplo con
elettrodi resistivi, a ridosso dei quali sono posti circuiti stampati con
“pads” di “read-out” allo scopo di misurare i segnali indotti dallo
spostamento nel campo elettrostatico delle cariche prodotte dalle valanghe
in ciascuno dei sotto-gaps.
2.3
Lo sviluppo delle MRPC
Il processo di sviluppo della tecnologia delle MRPC si è articolato in due
fasi, la prima è la ricerca di una soluzione tecnica che soddisfacesse le
richieste progettuali, costruendo un rivelatore a celle singole. Il passo
successivo è l’implementazione di una matrice di rivelatori con le stesse
caratteristiche del rivelatore singolo semplificando i processi di
costruzione, migliorando la capacità produttiva e abbassando nel contempo
8
i costi di produzione. Queste fasi hanno portato allo sviluppo dell’attuale
metodo di produzione delle MRPCs.
2.4
Descrizione delle “strips” di MRPC
La ricerca di soluzioni efficaci ai molteplici problemi nella costruzione ha
portato alla forma attuale delle “strips” composte da due MRPC
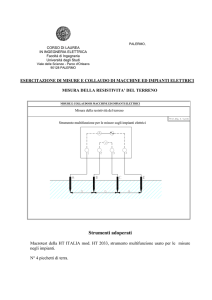
sovrapposte. La figura2.1 mostra la sezione trasversale delle “strips” di
MRPC illustrandone i componenti principali.
fig. 2.1: La figura illustra la sezione trasversale di una “double-stack”
MRPC.
Le parti campite diagonalmente della figura 2.1 rappresentano i PCB sui
quali sono stampate due file da 48 “pads” ognuna che hanno dimensioni
9
25x35 mm2. La MRPC ha una lunghezza complessiva di 122 cm e l’area
attiva è di 1200 x 74 mm2 sui quali il campo elettrico deve essere uniforme.
La richiesta sull’uniformità del campo elettrico rende necessaria
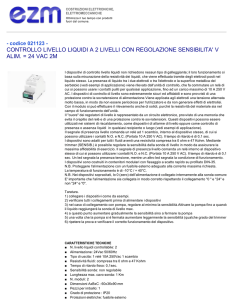
l’uniformità della resistività superficiale degli elettrodi. Nella figura 2.2
possiamo vedere l’immagine della di una MRPC aperta ed un suo
particolare
fig.2.2: “Strip” di MRPC e suo dettaglio. I rilievi paralleli trasversali che si
notano sono fili plastici che mantengono lo spesssore tra i vetri.
Il sistema TOF è costituito da 1638 “strips” di MRPC disposte in modo
tale da coprire l’angolo solido con ottima accettanza ed economia.
10
3.
Misure di resistività
L’uniformità della resistività superficiale lungo gli elettrodi è importante,
perchè qualunque sia la posizione lungo la MRPC nella quale si genera una
ionizzazione a valanga il segnale in uscita dalla “read-out pad”
corrispondente deve essere il medesimo (par.3.1); da questo la necessità di
monitorare la resistività. Prima di procedere è bene introdurre l’unità di
misura della resistività superficiale. Scriviamo la legge di Ohm per 2dimensioni:
E=ρ ⋅
S
j
S
(3.1)
dove E è il campo elettrico, ρS è la resistività superficiale e jS è la densità di
corrente superficiale che definiamo scrivendo la corrente dI che attraversa
un segmento infinitesimo dl come
dI = j S ⋅ n dl
(3.2)
dove n è il versore normale al segmento dl.
Considerando ora una superficie rettangolare attraversata da una densità di
corrente superficiale jS uniforme e parallela all’asse x (fig.3.1)
fig. 3.1:
con una resistività superficiale ρS anch’essa uniforme nella regione di
spazio descritta, calcoliamo il rapporto fra la differenza di potenziale
elettrico tra i punti x=0 e x=∆X e la corrente che attraversa il rettangolo:
11
∆X
V
R= =
I
0
∆Y
∆X
E ⋅ dx
=
j S ⋅ xˆdy
0
0
ρ S ⋅ j S ⋅ xˆdx
∆Y
ρS
=
j S ⋅ xˆdy
0
∆X
∆Y
j S dx
0
= ρS
j S dy
∆X
∆Y .
(3.3)
0
Si nota dalla (3.3) che la resistività superficiale ha le dimensioni di una
resistenza, tuttavia per ricordarsi le restrizioni (bidimensionalità) poste al
sistema, l’unità di misura standard è Ω square o Ω/ , in quanto ρS=R se
∆X=∆Y.
3.1
Caratteristiche minime degli elettrodi
Le caratteristiche richieste agli elettrodi sono una “rate capability”
maggiore di 50Hz/cm2 e la trasparenza al segnale di ionizzazione, queste
incidono
sulla
resistività
degli
elettrodi
richiesta.
Ricordando
l’elettrodinamica classica possiamo dedurre il comportamento dinamico
dell’eccesso di carica in una superficie resistiva tramite la generalizzazione
della soluzione unidimensionale del problema della diffusione che vedremo
in dettaglio.
Si consideri un elemento di lunghezza dx di un conduttore infinito con
resistenza per unità di lunghezza ρL e capacità per unità di lunghezza ξ, con
schema elettrico riportato in figura 3.2
dx
ρLdx
ξdx
fig.3.2
scrivendo la caduta di potenziale elettrico sull’elemento dx
12
∂U = I ρ ∂x ,
L
(3.4)
la corrente che scorre nella capacità
∂I = ξ∂x
∂U
∂t
(3.5)
e l’equazione di continuità per la carica nel conduttore ∇I =
∂q
∂t
otteniamo l’equazione di diffusione
∂U
1 ∂ 2U
=
∂t
ρ Lξ ∂x 2 .
(3.6)
la soluzione dell’equazione differenziale con condizioni iniziali
q ( x , t = 0) =
x = t = 0;
Q0
(3.7)
x ≠ 0 , t = 0;
0
è la distribuzione di carica q(x,t) valida per t
q ( x ,t ) =
Q0
π
t
ρ Lξ
exp −
ρ Lξ
t
si noti che le dimensioni di
0
x2
(3.8)
1
= T −1 L2 sono quelle di un parametro di
ρ Lξ
[
]
diffusione. Analizzando la soluzione 3.8 alla luce delle richieste progettuali
vediamo che la lunghezza
tr
ρLξ
, dove tr è il tempo di risposta delle “pad”,
deve essere inferiore alle dimensioni delle stesse per evitare che la scarica
coinvolga più “pads”. Il tempo ρ Lξ ⋅ d 2 , dove d è metà della lunghezza
dell’elettrodo, deve essere inferiore a 20ms che è il tempo morto che ci si
aspetta con una “rate capability” di 50Hz/cm2. Valutando come la capacità
per unità di superficie di un condensatore ad armature piane parallele
(εRε0/l) con le dimensioni e i materiali del caso sotto esame, la resistività
13
superficiale dovrà avere un valore di circa
5 MΩ
square
e una varianza
specifica (σ/media) inferiore al 30%.
3.2
Strumenti di misura
La misura di resistività superficiale è fondamentalmente una misura di
resistenza. Lo strumento che si utilizzerà sarà quindi un ohmetro collegato
ad un sensore in grado di fornire una grandezza legata univocamente alla
resistività superficiale sotto analisi. Esistono diversi tipi di sensore a questo
scopo. Il sensore che permette un uso più flessibile è di forma circolare, la
densità di corrente superficiale scorre radialmente nell’area in analisi che è
una corona circolare
fig.3.3
In questo caso la resistenza misurata fra i due elettrodi, supponendo la
resistività costante all’interno dell’area, si ricava ponendo j s =
I
2πr
con r
distanza dal centro della corona ed integrando lungo il raggio la legge di
Ohm (3.1)
V =
Routr
Rout
Rin
Rin
E ⋅ d r = ρS
jS ⋅ d r =
ρS I
2π
Rout
Rin
dr
= ρS I
r
ln
rout
rin
2π
.
(3.9)
la resistenza misurata è uguale alla resistività superficiale per un fattore
moltiplicativo
r
1
ln out . Questa soluzione è ottima se si desidera
2π
rin
investigare piccole porzioni di grandi aree, tuttavia presenta alcune
14
difficoltà dal punto di vista costruttivo, prima fra tutte la difficoltà di
sagomare le superfici conduttive in forma perfettamente circolare e
concentrica.
Una soluzione più semplice ed efficace per il caso in questione è la
costruzione di un sensore di forma quadrata che realizza le condizioni
descritte dalla figura 3.1. Un sensore di resistività costruito con questo
criterio presenta il problema di dover essere applicato ad un area resistiva
rettangolare con il lato più corto uguale alla distanza fra i contatti metallici.
Nel caso in cui il sensore è più piccolo dell’area da investigare si verifica
una situazione simile a quella illustrata in figura 3.4, ovvero un flusso di
corrente disperso sulla superficie che non permette di analizzare
esclusivamente l’area all’interno del quadrato, con conseguente sottostima
della resistività ρS. Le restrizione d’uso di questo sensore non influiscono
particolarmente sul nostro caso, in quanto è sufficiente dimensionare il
sensore in modo da avere la distanza fra i contatti uguale alla larghezza
dello strato di vernice resistiva. Gli elettrodi resistivi delle MRPC sono
costituiti da vetri spessi 550µm di forma rettangolare di dimensioni
85x1220mm2; una vernice resistiva copre una superficie di 74x1220mm2.
fig. 3.4
La situazione teorica descritta non corrisponde esattamente alla realtà a
causa della rugosità delle superfici. Sulla superficie resistiva, presso i punti
di contatto con il sensore, ci sono delle zone di transizione fra il regime di
corrente ideale descritto nella figura 3.1 e i punti di contatto con il sensore.
15
Un’idea della transizione può essere presa dalla figura 3.5, dove senza
rigore matematico sono rappresentate le linee di flusso della densità di
corrente superficiale. Questa discrepanza fra modello e realtà genera un
“off-set” nell’output resistivo del sensore che può essere ridotto ponendo
un peso (0,5÷4 Kg) sopra il sensore migliorando il contatto fra la superficie
e il sensore.
fig. 3.5
Il sensore utilizzato ha le seguenti dimensioni
fig. 3.6
16
3.2.1 Il picoamperometro con interfaccia
La misura di resistività superficiale degli elettrodi è stata svolta con il
sensore in figura 3.6 collegato ad un multimetro in modalità ohmetro.
Questo sistema di misura ha permesso di controllare il comportamento
della resistività superficiale degli elettrodi nel tempo. La grande quantità di
vetri resistivi del rivelatore di tempo di volo ha determinato la necessità di
realizzare un sistema di misura e memorizzazione dei dati più rapido. Lo
strumento che permette di ridurre i tempi di misura è un picoamperometro
con sorgente di tensione continua e interfaccia seriale RS232 e parallela
IEEE-488. Questo strumento ha la possibilità di essere interfacciato con un
calcolatore dotato di opportuna interfaccia hardware e software; questa
peculiarità permette la memorizzazione su calcolatore durante la misura
abbreviando notevolmente il tempo destinato a questa. Nella tabella 3.1
riportiamo i dati tecnici del picoamperometro Keithley6487 per gli
intervalli di lavoro dello strumento.
Current range
2 nA
20 nA
200 nA
2 µA
20 µA
voltage range
±10.1V
resolution
10 fA
100 fA
1 pA
10 pA
100 pA
step size
200µV
accuracy
0,3%+400 fA
0,2%+1pA
0,15%+10pA
0,15%+100pA
0,1%+1nA
accuracy
0,1% + 1mV
tab. 3.1
3.2.2 Schema elettrico del set-up sperimentale
Lo schema del circuito elettrico componente il set-up sperimentale è
relativamente semplice.
fig. 3.7
17
3.3 Software di acquisizione
Il software che permette di acquisire i dati dal picoamperometro e
memorizzarli nella memoria di massa di un calcolatore è uno strumento
virtuale implementato con il linguaggio di programmazione visuale
LABVIEWTM. Questa applicazione permette di utilizzare la porta di
comunicazione seriale RS232 per il trasferimento di dati fra il calcolatore e
lo strumento, in modo tale da poter pilotare in remoto lo strumento,
compiere le operazioni preliminari del medesimo e trasferire le misure di
resistività su di un file (ad es. un foglio di lavoro). In figura 3.8 è possibile
vedere il “front panel” dello strumento virtuale
fig. 3.8: Front panel dello strumento virtuale
18
3.4 Ripetibilità e incertezze
Le specifiche tecniche del Keithley6487 dovrebbero garantire un’incertezza
di misura dello 0,2÷0,4% (tab.3.1.). Ponendo il sensore sull’elettrodo con il
peso su di esso e misurando un numero di volte sufficiente ad accumulare
una statistica significativa, rileviamo una dispersione gaussiana delle
misure (fig.3.9) con varianza specifica (σ/media) dell’ordine di grandezza
aspettato.
30
80 counts ; mean=4,62MΩ ; s = 0,02 MΩ ; σ/mean = 0,46%
counts
25
20
15
10
5
0
4,56
4,58
4,6
4,62
MΩ/square
4,64
4,66
fig.3.9
Nel caso in cui la misura è ripetuta compiendo un operazione di
riposizionamento del sensore (ovvero alzandolo e riabbassandolo sullo
stesso punto), la dispersione dei dati è maggiore (fig. 3.10) a causa
dell’incertezza sulla posizione. L’incertezza relativa da considerare in una
misura sugli elettrodi dovrà quindi essere presa dell’ordine di qualche
punto percentuale, quindi perfettamente adeguata per il controllo della
resistività lungo l’elettrodo.
25
55 counts; mean =5,63MΩ; σ =0,11MΩ; σ/mean=2%
counts
20
15
10
5
0
5,3
5,4
5,5
5,6
5,7
MΩ/square
5,8
5,9
fig.3.10
19
3.4.1 Operazioni standard di misura
Le operazioni di misura su di un elettrodo sono molto semplici. Dopo aver
reso operativi il calcolatore ed il picoamperometro, è necessario:
1. avviare l’applicazione di misura ,
2. inserire i dati delle variabili ambientali (temperatura, umidità relativa,
codice identificativo del vetro, ecc.),
3. iniziare l’operazione di misura sull’elettrodo premendo il pulsante
“PROCEDI” sullo schermo,
4. porre il sensore sull’elettrodo nel punto desiderato,
5. porre i peso su di esso,
6. eseguire il comando misura tramite il pulsante “MISURA” sullo
schermo,
7. attendere l’operazione di misura e trasferimento dati,
8. togliere il peso e riprendere dal punto 4. nel caso si desideri analizzare
altri punti della superficie,
9. nel caso si desideri analizzare un nuovo vetro, inserire le specifiche del
nuovo vetro e riprende dal punto 4.
10. chiudere applicazione e spegnere lo strumento.
fig.3.11: Il banco di lavoro durante la misura
20
4.
Caratteristiche resistive degli elettrodi
Le caratteristiche meccaniche degli elettrodi non sono in discussione in
questa relazione, in ogni caso gli stress meccanici (vibrazioni, flessione,
abrasione,ecc…) ai quali sono sotto posti gli elettrodi durante l’uso non
sono tali da richiedere uno studio di questo problema. Durante la vita
operativa del rivelatore gli unici shock ai quali è sottoposta una MRPC
sono gli “streamers” e la corrosione da parte degli alogenuri prodotti dalla
disgregazione delle molecole di freon nel gas. Le caratteristiche elettriche
in studio sono relative alla vernice resistiva: la funzione lavoro e la
resistività superficiale dello strato di vernice acrilica. La seconda di queste
è oggetto di questa relazione ed è riassunta in cinque misure di resistività
prese in diversi punti della superficie (2,5cm, 30cm, 55cm, 81cm e 107cm
dal bordo sinistro). È lecito domandarsi se cinque misure sono sufficienti
per esprimere le variazioni di resistività sull’elettrodo; studiando il
problema del campionamento del segnale e la trasformata di Fourier
sappiamo che qualora fossero presenti variazioni della resistività con
lunghezza d’onda inferiore alla distanza fra due punti di misura queste
potrebbero distorcere la funzione ricostruita tramite i campioni. Il dubbio in
questione può essere fugato dalla statistica, ovvero se l’andamento dei
campioni all’interno di un elettrodo è simile per tutti gli elettrodi prodotti
con lo stesso sistema, possiamo supporre che non vi siano delle distorsioni
nell’operazione di misura o che queste abbiano un valore inferiore
all’incertezza di misura.
4.1 Composizione chimica della vernice resistiva
L’aspetto degli elettrodi è quello di un vetro di dimensioni 85x1220mm
verniciato su una superficie di dimensioni 74x1220; sono stati studiati due
tipi di vernice con composizione chimicha diversa. Una di colore rosso è
una vernice acrilica non siccativa con impurità metalliche (ossidi di cromo
e zinco) dove la resistività superficiale è regolata tramite la quantità di
21
catalizzatore1 durante la produzione della vernice stessa e può essere
depositata sul vetro tramite diversi processi di verniciatura (immersione,
spruzzatura, getto di vernice). Gli elettrodi di colore grigio sono vetri
cosparsi di uno strato di Lycron miscelato con impurità di stagno; il
processo di pittura in questo tipo di elettrodi è esclusivamente la
spruzzatura, questa permette la deposizione uniforme e controllata del
Lycron, e la regolazione della resistività tramite la quantità di pigmento
depositato.
4.2 Uniformità e valor medio della resistività
La produzione degli elettrodi resistivi avviene in uno stabilimento esterno
ai laboratori dell’INFN; un continuo scambio di informazioni fra il
produttore degli elettrodi e il laboratorio è fondamentale per ottimizzare la
produzione. Il produttore costruisce campioni di elettrodi realizzati tramite
diverse tecniche di verniciatura e diverse composizioni chimiche,
permettendo al laboratorio di effettuare misure di qualità del prodotto e
determinare le tecniche più adatte per la produzione.
In Figura 4.1 sono rappresentate la resistività normalizzata (ρ’i=ρi/ρ1) in
funzione della distanza dal bordo sinistro per campioni corrispondenti ad
quattro procedimenti produttivi e composizioni chimiche di vernice
acrilica; in figura 4.2 sono rappresentate le distribuzioni delle medie sui
cinque punti di ogni singolo vetro dei quattro campioni di produzione
illustrati in figura 4.1.
Il Campione Td è stato verniciato tramite getto, tuttavia la velocità
longitudinale del getto non è stata uniforme sui 120 cm del vetro cosi il
primo punto risulta molto più resistivo degli altri quattro. L’effetto appare,
sull’estremo opposto, anche nel campione Tc sebbene con minore
probabilità. I campioni Tg e Te hanno un buon grado di uniformità e il
campione Tg presenta in gran parte dei suoi elementi la resistività media
ricercata per gli elettrodi delle MRPC.
1
Le vernici e i composti denominati acrilici sono composti da polimeri di molecole che presentano il
gruppo acrilico nella loro composizione, il catalizzatore è un “reagente” che facilita la polimerizzazione.
22
fig4.1: Resistività normalizzata in funzione della distanza
fig 4.2: Distribuzioni del la resistività media degli elettrodi per i relativi
campioni; è indicata la percentuale di catalizzatore
23
4.3 Assestamento delle caratteristiche della vernice
Un inconveniente che abbiamo riscontrato in questo tipo te di misura è la
tendenza della resistività superficiale a diminuire nel tempo. Il periodo di
tempo nel quale la resistività diminuisce è limitato, si tratta di un periodo di
assestamento dopo la verniciatura nel quale lo strato resistivo raggiunge
l’equilibrio. Questo processo è più rapido nelle zone dove la resistività è
maggiore e la varianza specifica, ovvero il rapporto fra lo scarto quadratico
medio e la media sui cinque punti di misura, non ha variazioni
significative.
a
b
fig.4.3a,b: Andamento della resistività superficiale media e della varianza
specifica in funzione del tempo.
I grafici in figura 4.3 mostrano il comportamento delle due tipologie di
elettrodo.
24
4.4 Assestamento tramite trattamento termico
Il processo di assestamento è una caratteristica della vernice che presenta
diversi svantaggi, per primo la scarsa flessibilità di utilizzo, ovvero la
necessità di monitorare la resistività costantemente fino al compimento
dell’assestamento.
La necessità di accelerare il processo di assestamento è stata soddisfatta
con l’uso di un trattamento termico ad alta temperatura. Ponendo gli
elettrodi in un forno asciugatore ad una temperatura di 65÷90 °C è
possibile accelerare il processo di assestamento.
fig 4.4a,b:Esempio di assestamento accelerato per le due tipologie.
Come è possibile osservare in figura 4.4 il processo di assestamento si
compie attraverso un trattamento termico di circa 1000 minuti (16 ore e 40
minuti). Il processo di polimerizzazione di entrambe le vernici è del tipo
non siccativo (nelle vernici di tipo siccativo il processo di polimerizzazione
avviene per semplice esposizione all’aria) che avviene in un ambiente a
temperatura elevata (1200°C), il processo di assestamento consiste in un
rilassamento delle tensioni interne generate dal processo di raffreddamento.
25
5
Conclusioni
Gli scopi di questa relazione erano principalmente la realizzazione di un
sistema di misura “rapido” e la verifica delle caratteristiche degli elettrodi.
Il primo scopo è stato raggiunto grazie alla presenza dell’interfaccia nel
picoamperometro KEITHLEY6487, con la realizzazione del software
necessario alla formattazione dei dati sperimentali in foglio di lavoro.
La seconda parte degli scopi di questa relazione è stata raggiunta
riscontrando con il sistema di misura “rapido” le medesime caratteristiche
di assestamento misurate in passato con il sistema non automatizzato.
Il motivo per il quale la vernice resistiva è soggetta ad un assestamento
delle sue proprietà elettriche è da ricercarsi nella natura del processo di
polimerizzazione. Gli inconvenienti derivanti dal processo di assestamento
sono stati rimediati tramite l’utilizzo del trattamento termico. È possibile
condizionare gli elettrodi nell’arco di 24 ore ed utilizzarli, dopo gli
opportuni controlli, nella costruzione delle MRPC.
Le due tipologie di vernice riescono a soddisfare le richieste sulle proprietà
elettriche degli elettrodi; i criteri che hanno portato alla scelta della vernice
acrilica per la produzione delle MRPC sono di natura tecnica.
Il Lycron presenta diversi inconvenienti: la scarsa resistenza all’abrasione
che limita l’affidabilità degli elettrodi e la tossicità che influisce
grandemente sulla logistica e la capacità produttiva.
26
Bibliografia
ALICE Collaboration, Technical Proposal, CERN/LHCC;
ALICE Collaboration, Alice TDR8, CERN/LHCC;
G. Giacomelli, Introduzione alla fisica delle particelle elementari;