UNIVERSITÀ DEL SALENTO
FACOLTÀ DI SCIENZE MATEMATICHE, FISICHE E NATURALI
CORSO DI LAUREA IN FISICA
TESI DI LAUREA SPECIALISTICA
RIMOZIONE DELLE DISUNIFORMITÀ
INTER E INTRA IMMAGINE IN MRI
Relatore:
Ch.mo Prof. Giorgio DE NUNZIO
Correlatore:
Ch.mo Dott. Marco FAVETTA
Laureanda:
Alessandra CARLÀ
Anno Accademico 2008-2009
2
3
SOMMARIO
Introduzione ......................................................................................................................... 7
CAPITOLO 1: Il morbo di Alzheimer ............................................................................... 10
Caratteristiche della patologia. ...................................................................................... 10
Le cause che portano all’insorgere del morbo di Alzheimer......................................... 12
L’amiloide ................................................................................................................... 13
I Grovigli neuro fibrillari .............................................................................................. 14
L’infiammazione ......................................................................................................... 14
Diagnosi precoce ............................................................................................................ 14
CAPITOLO 2: Risonanza Magnetica (MRI): fisica, tecnologia, e artefatti ...................... 16
Evoluzione storica dell’MRI ............................................................................................ 16
La fisica dell’imaging in Risonanza Magnetica ............................................................... 18
Proprietà magnetiche del nucleo atomico ................................................................. 18
Interazione dei nuclei con un campo magnetico ....................................................... 19
Magnetizzazione macroscopica .................................................................................. 21
Fenomeni di rilassamento ........................................................................................... 23
Sequenze di acquisizione ............................................................................................ 26
Saturation Recovery ................................................................................................... 26
Inversion Recovery ..................................................................................................... 27
Spin Echo .................................................................................................................... 28
Mezzi di contrasto ...................................................................................................... 29
Struttura di un apparecchiatura MRI ............................................................................. 29
Artefatti .......................................................................................................................... 31
Rumore RF .................................................................................................................. 32
Disomogeneità di campo magnetico Bo..................................................................... 32
4
Gradienti ..................................................................................................................... 32
Disomogeneità di RF ................................................................................................... 33
Suscettività magnetica................................................................................................ 34
Movimento ................................................................................................................. 34
Volume Parziale .......................................................................................................... 35
CAPITOLO 3: Il problema delle disomogeneità di scala di grigi in MRI......................... 36
CLASSE I: Inomogeneità dell’intensità............................................................................ 37
CLASSE II: Standardizzazione dell’intensità .................................................................... 39
Metodi per la standardizzazione dell’intensità: breve rassegna ................................... 41
Standardizzazione tramite landmark.......................................................................... 41
Miscela di gaussiane ................................................................................................... 42
Minimizzazione della divergenza di Kullback-Leibler ................................................. 43
Metodo di standardizzazione tramite Landmark: dettagli ............................................ 44
Notazione.................................................................................................................... 45
Procedimento ............................................................................................................. 45
Limiti del metodo........................................................................................................ 49
Operazioni rilevanti per la procedura completa di standardizzazione .......................... 50
Coregistrazione ........................................................................................................... 50
Segmentazione ........................................................................................................... 63
CAPITOLO 4: Un software per la standardizzazione delle scale di grigi ......................... 67
Descrizione del software ................................................................................................ 68
Coregistrazione ........................................................................................................... 68
Segmentazione ........................................................................................................... 70
Passaggio dalle mappe di probabilità alle immagini WM/GM/CSF............................ 71
Standardizzazione ....................................................................................................... 73
Applicazione e risultati ................................................................................................... 74
Analisi quantitativa......................................................................................................... 78
5
Conclusioni e prospettive ................................................................................................... 80
Bibliografia ........................................................................................................................ 81
Ringraziamenti ................................................................................................................... 85
6
― Non è perché le cose sono difficili che non osiamo,
ma è perché non osiamo che sono difficili.”
Seneca
7
Introduzione
Nella società contemporanea le patologie neurodegenerative sono in continuo aumento;
verso la fine del 2006, secondo uno studio promosso da Alzheimer’s Disease International
(ADI) e pubblicato su Lancet, le persone colpite da demenza nel mondo (lo studio riguarda
cinque aree geografiche: America , Europa, Africa del Nord, Medio Oriente, Asia del Sud e
Pacifico occidentale) erano quasi 27 milioni.
A causa di quest‘enorme diffusione, negli ultimi anni molte delle energie della comunità
scientifica sono state rivolte allo sforzo di diagnosticare in maniera precoce alcune delle più
importanti patologie neurodegenerative, nonché a investigare le prospettive di cura.
Per molte di queste patologie, e in particolare per la malattia di Alzheimer (Alzheimer’s
Disease, AD) che totalizza circa il 70% dei casi, la Ricerca ha individuato una forte
correlazione tra il progredire della malattia e l‘atrofia di alcune strutture cerebrali.
Gran parte degli studi di risonanza magnetica strutturale (Magnetic Resonance Imaging,
MRI) sulla malattia di Alzheimer e sul deterioramento cognitivo lieve (Mild Cognitive
Impairment, MCI, fase di transizione tra il normale invecchiamento e la malattia di Alzheimer
precoce) si sono concentrati sull'ippocampo e sulla corteccia entorinale, strutture
principalmente composte di materia grigia, situate nel lobo temporale mediale (Medial
Temporal Lobe, MTL). Uno studio sistematico delle immagini, con l‘analisi in particolare
delle alterazioni della struttura ippocampale, sembra infatti poter fornire un buon indicatore
per eseguire la diagnosi precoce del morbo di Alzheimer.
Occorre infatti dire che una procedura di valutazione standardizzata e affidabile, capace di
fornire indicazioni specifiche sullo sviluppo della malattia di Alzheimer, non è ancora
disponibile.
Attualmente
l‘unico
approccio
diagnostico
per
l‘individuazione
del
deterioramento cognitivo precoce si basa su test neuropsichiatrici, che però producono molti
falsi positivi per le differenze culturali, di scolarità e legate all‘umore del soggetto.
Al momento, quindi, l‘unica diagnosi ―definita‖, ossia certa, può essere effettuata solo
dopo aver esaminato il cervello post mortem, per confermare la presenza delle caratteristiche
anomalie (placche neuritiche, gomitoli neurofibrillari).
È evidente pertanto l‘importanza di sviluppare un metodo di diagnosi precoce, non
invasivo, riproducibile e per quanto possibile non inficiato da fattori umani (paziente e
medico).
8
Questa Tesi di Laurea si pone nella cornice del Progetto MAGIC5 (Medical Applications
on a Grid Infrastructure Connection), che raccoglie svariate università italiane e alcuni
ospedali, finanziato dall‘Istituto Nazionale di Fisica Nucleare (INFN). Esso si occupa dello
sviluppo e dell‘ottimizzazione di sistemi automatici per la diagnosi assistita (CAD, Computer
Assisted Diagnosis).
Attualmente, MAGIC5 si occupa, tra l‘altro, di realizzare un sistema per la diagnosi
precoce della malattia di Alzheimer in immagini di Risonanza Magnetica. Questo sistema ha
alla base un metodo di estrazione automatica della regione ippocampale, identificata sotto
forma di una scatola di dimensioni opportune, che include sia l‘ippocampo che regioni
limitrofe. La scatola è posizionata nella corretta zona del tessuto cerebrale tramite operazioni
di coregistrazione, a partire da scatole ippocampali campione (denominate template) già
estratte in precedenza, anche manualmente da un medico.
Dopo l‘estrazione, la scatola viene esaminata allo scopo di individuare e quantificare le
regioni atrofiche, giungendo così alla valutazione della presenza della malattia di Alzheimer.
Nell‘operazione di estrazione della scatola ippocampale gioca un ruolo determinante il
confronto tra i valori di grigio del cervello in esame, e quelli delle scatole campione.
Quest‘operazione è semplice solo in apparenza, perché presuppone che il significato fisico dei
valori di grigio nelle immagini (template e paziente) sia simile, ossia che la scala dei livelli di
grigio delle due immagini sia comune.
Purtroppo, le intensità dei pixel di un immagine MRI non hanno un valore assoluto fissato
per specifici tessuti, per cui le scale di grigi non sono direttamente rapportabili ai tessuti tipici
dei vari comparti dell‘organismo esaminato. Nel caso particolare delle neuro immagini ciò
comporta, ad esempio, che dal valore di grigio di un pixel non si può dedurre in maniera
diretta il tipo di materia cerebrale corrispondente (bianca o grigia o fluido cerebrospinale, etc).
Questa Tesi di Laurea propone una soluzione al problema, con la realizzazione di un
software (scritto in ambiente Matlab) che, partendo da immagini MRI con scale di grigi
diverse (perché ottenute in momenti diversi, o da macchinari diversi) attua delle
trasformazioni puntuali standardizzando gli istogrammi, e giungendo dunque ad un set di
immagini tra loro coerenti e confrontabili. A questo punto tutte le operazioni di
coregistrazione con le scatole template diventano lecite, con un miglioramento
dell‘accuratezza della procedura di estrazione.
9
La Tesi è divisa in alcuni capitoli, secondo la struttura seguente.
Nella convinzione che uno studio così interdisciplinare come quello della Fisica e
dell‘Informatica applicate alla Medicina, non possa avvenire a compartimenti stagni, e che il
fisico che se ne occupa debba anche possedere una sia pur minima base nozionistica medica,
il Primo Capitolo introduce brevemente il problema della malattia di Alzheimer, della sua
diagnosi e della cura.
Il Secondo Capitolo descrive la tecnica di imaging medico basata sulla Risonanza
Magnetica, dandone le basi fisiche e ingegneristiche, e introducendo gli artefatti, classe di
fenomeni alla quale anche le disuniformità delle scale di grigi appartengono.
Il Terzo Capitolo espone in dettaglio il problema delle disuniformità dei grigi, e dà una
brevissima rassegna su alcuni metodi, reperibili in letteratura, tesi alla rimozione
dell‘artefatto. Si sofferma in particolare sul procedimento su cui si basa il software realizzato.
Il Quarto Capitolo descrive infine la procedura software, e dà alcuni risultati preliminari
della sua applicazione a un insieme di immagini disomogenee.
Seguono le Conclusioni e Prospettive, e una Bibliografia essenziale.
Chiudono la Tesi i Ringraziamenti.
Per ciò che concerne il lavoro da me eseguito per la realizzazione della Tesi, mi sono
occupata, innanzitutto, del reperimento, dello studio, e del confronto degli articoli di Ricerca
disponibili sull‘argomento. Una volta scelta una procedura promettente di standardizzazione
delle scale di grigi, era necessario decidere come implementare gli algoritmi descritti: essendo
infatti le procedure di segmentazione e coregistrazione (adoperate nel software) piuttosto
complicate da realizzare ex novo in un qualsivoglia linguaggio di programmazione (anche ad
alto livello come Matlab) si è stabilito di adoperare per queste fasi dei software già esistenti;
ho testato allora diversi software (ad esempio SPM e FSL) su molte immagini, per individuare
il più adatto anche in base a considerazioni di compatibilità con i file immagine. Iniziata la
fase di sviluppo vera e propria, in base alle conoscenze di Matlab in mio possesso ho
contribuito alla stesura del codice, e ne ho effettuato il test.
10
CAPITOLO 1: Il morbo di Alzheimer
La malattia di Alzheimer (AD) è stata definita ―Epidemia silente del terzo millennio‖. Fu
descritta per la prima volta nel 1906 da Alois Alzheimer, neuropsichiatra tedesco, in una
donna di 51 anni che presentava perdita della memoria, cambiamento del carattere, delirio di
gelosia, incapacità a provvedere alle cure domestiche. Fino agli anni 70 si riteneva che la
malattia potesse colpire solo le persone al di sotto dei 65 anni: si parlò quindi di "demenza
presenile". Solo negli ultimi decenni si è accertato che la malattia. non è esclusiva dell‘età
presenile, ma anzi è tanto più frequente quanto più aumenta l‘età. Essa è una patologia
degenerativa del sistema nervoso centrale, caratterizzata da un progressivo e irreversibile
declino cognitivo e funzionale e da anomalie del comportamento.
Nel mondo sono colpite 26.6 milioni di persone, 6 milioni in Europa, 800.000 in Italia;
numeri destinati a raddoppiarsi nei prossimi 10-15 anni.[1]
È una patologia grave e in crescita numerica continua, fortemente invalidante; la sua
incidenza socio-economica e le prospettive tutt‘altro che rassicuranti sulla sua espansione
hanno spinto il Parlamento Europeo ad adottare una dichiarazione scritta con cui si riconosce
l‘Alzheimer priorità di salute pubblica, impegnandosi ad un piano d‘azione.
Francia, Gran Bretagna, Norvegia, seguendo le direttive di Strasburgo, hanno varato un
piano quinquennale stanziando finanziamenti straordinari per migliorare la qualità della vita
dei malati, per potenziare i servizi socio-sanitari, per favorire la ricerca clinica, per la
diagnosi precoce.
In Italia un d.d.l. giacente in Senato, pur con un finanziamento minimo, prevede
soprattutto il miglioramento dell‘autosufficienza e della qualità della vita del malato e della
sua famiglia. Poco viene stanziato per la ricerca clinica, determinante per scoprire le cause
scatenanti della malattia, e per la diagnosi precoce, fondamentale per tamponare il processo
degenerativo nella sua fase iniziale, quando è ancora almeno in parte controllabile.
Caratteristiche della patologia.
Tra le malattie neurodegenerative il morbo di Alzheimer rappresenta la causa più
frequente di demenza ed è caratterizzata dalla morte di cellule celebrali, particolarmente in
quelle aree del cervello deputate alla memoria e alle funzioni cognitive. La sua durata,
comunque dell‘ordine di 10 – 20 anni, è difficile da definire in quanto l‘esordio è lento e la
diagnosi spesso tardiva.
11
La patologia inizia in maniera subdola e insidiosa: le prime avvisaglie sono solitamente
piccoli disturbi della memoria, associati spesso a sintomi di tipo depressivo ed ansioso.
Molto spesso, infatti, la malattia all‘esordio viene interpretata e diagnosticata come un
disturbo depressivo.
Le caratteristiche di questa malattia variano da una persona all‘altra; tuttavia è possibile
differenziarle, con molta approssimazione, in tre fasi.
Nella prima si riscontra una leggera perdita della memoria circoscritta a sporadici episodi
della vita quotidiana, ovvero disturbi della memoria breve termine, denominata anche ongoing memory. Si possono manifestare, inoltre, lievi problemi nella concentrazione,
incertezza nei calcoli matematici e nei ragionamenti che richiedono una certa logica. Nel
malato si riscontra cambiamenti del carattere e della personalità, difficoltà nelle relazioni col
mondo esterno e diminuzione delle capacità visuo-spaziali.
Nella fase successiva i sintomi sono dati dal peggioramento delle difficoltà già presenti.
Inoltre appare una prima forma di leggera demenza, in cui vi è un manifesto aumento delle
difficoltà di apprendimento e memorizzazione ed in alcuni casi si presentano difficoltà di
linguaggio, disturbi della percezione (agnosia) o nell‘eseguire movimenti volontari (aprassia).
Non tutte le forme di memoria vengono colpite nella stessa misura: la memoria episodica
legata ai ricordi più vecchi, le conoscenze acquisite (memoria semantica) e la memoria
implicita e più in particolare quella procedurale, vengono alterate a un livello minore rispetto
alla memoria legata ad accadimenti nuovi o ricordi recenti. I disturbi del linguaggio sono
caratterizzati da una riduzione del vocabolario e dalla minore scorrevolezza della parole che
portano ad un impoverimento del linguaggio scritto e parlato. Le sequenze motorie più
complesse diventano sempre più scoordinate col progredire della malattia, il che comporta un
aumento del rischio, per il soggetto affetto da morbo di Alzheimer, di cadere.
Il peggioramento delle capacità visuo-spaziali porta il malato a perdersi sui percorsi
conosciuti, a non impararne di nuovi e a non orientarsi tra le mura di casa. La capacità di
riconoscere facce e luoghi viene progressivamente perduta.
La terza fase è caratterizzata da una completa dipendenza dagli altri. Le funzioni
intellettive sono gravemente compromesse.
Compaiono difficoltà nel comunicare, rigidità degli arti, crisi epilettiche. Le espressioni
verbali sono ridotte a ripetizioni di parole dette da altri, o ripetizioni continua di gemiti ed in
alcuni casi si può arrivare alla completa perdita della capacità di parlare.
12
Il paziente alla fine non è più in grado di eseguire neanche il più semplice compito senza
l‘aiuto di qualcuno. Spesso la massa muscolare e la capacità di camminare si riducono a tal
punto che il soggetto non può far altro che rimanere a letto.
L‘immobilità e la continua costrizione al letto possono fare insorgere piaghe da decubito,
infezioni urinarie, respiratorie oltre a contratture muscolari. In seguito a queste complicanze
sopraggiunge la morte.
Lungo tutto il decorso della malattia, ma soprattutto nelle prime due fasi, sono presenti
sintomi cosiddetti ―non cognitivi‖, in varia misura e di diversa gravità: agitazione,
irrequietezza, apatia, disturbi del sonno, ansia ed anche alterazioni del comportamento
alimentare.
Le cause che portano all’insorgere del morbo di Alzheimer.
Nei vari anni sono state fatte tante ipotesi per comprendere da cosa potesse originare il
morbo di Alzheimer; attualmente tre sono le ipotesi che esistono e tentano di spiegare la causa
della patologia. La più vecchia, sulla quale si basano molte delle terapie farmacologiche oggi
a disposizione, è l‘ipotesi colinergica,1 secondo la quale l‘Alzheimer è causato dalla riduzione
della sintesi del neurotrasmettitore acetilcolina.2 Quest‘ipotesi non ha ampio sostegno, poiché
le terapie volte a trattare la deficienza di acetilcolina non sono state molto efficaci nel frenare
l‘AD.
Nel 1991 è stata avanzata l‘ipotesi amiloidica secondo la quale i depositi di β-amiloide
(un peptide) con la formazione di placche sono la causa fondamentale dell‘insorgere del
morbo. A supporto di questa ipotesi vi è la localizzazione del gene per l‘amyloid precursor
protein (APP) sul cromosoma 21, e il fatto che le persone con la trisomia 21 (sindrome di
Down), che hanno una copia extra del gene, quasi universalmente presentano la
sintomatologia dell‘Alzheimer a partire dai 40 anni di età.
Nel 2004 uno studio ha trovato che la deposizione di placche non è ben correlata con la
perdita neuronale; questa osservazione va a sostegno dell‘ipotesi tau, secondo la quale le
anomalie della proteina tau sono la causa della malattia e della sua progressiva degenerazione.
Secondo questo modello quando la proteina tau è iperfosforilata essa produce dei grovigli
neurofibrillari all‘interno della cellula nervosa. Quando ciò accade, si ha il collasso del
sistema di trasporto neuronale. Questo potrebbe causare in una prima fase il
1
―Colinergica‖ è la particolare fibra nervosa che produce l'acetilcolina.
Il composto chimico noto come acetilcolina, (abbreviazione ACh), è stato il primo neurotrasmettitore ad
essere individuato. È responsabile in molti organismi (tra cui l'uomo) della neurotrasmissione sia a livello di
Sistema nervoso centrale (SNC) che di Sistema nervoso periferico (SNP).
2
13
malfunzionamento della comunicazione biochimica tra i neuroni e conseguentemente la morte
delle cellule.
Al di là dell‘origine della malattia, gli studiosi sono concordi nell‘affermare che quattro
sono i processi che contribuiscono alla formazione delle lesioni presenti nel cervello delle
persone con malattia di Alzheimer: la produzione di amiloide, la formazione dei grovigli
neurofibrillari, l‘infiammazione e la neurodegenerazione (o morte cellulare).[2] Ciascun
processo contribuisce sia autonomamente sia in relazione agli altri nel provocare il danno
cerebrale. I meccanismi molecolari della neurodegenerazione sono a tutt‘oggi non del tutto
chiari, mentre di più si sa sugli altri tre processi, che vediamo in maggior dettaglio.
L’amiloide
Due decadi di ricerche hanno permesso di determinare l‘effetto prodotto dalla formazione
di placche di ß-amiloide negli spazi extra-cellulari. La presenza di β-amiloide, di cellule
infiammatorie e radicali liberi crea un microambiente che porta alla morte i neuroni.[3]
Amiloide e ß-amiloide sono il prodotto di due vie cataboliche della stessa molecola, ma,
mentre il primo, presente nelle persone sane, è solubile e dunque eliminabile, il secondo,
tipico dell‘Alzheimer, è insolubile e si deposita in placche. Il cervello di persone anziane,
cognitivamente integre, spesso contiene diffusi depositi di sostanza amiloide ma poche
placche. Nella malattia di Alzheimer le placche si accumulano nella corteccia temporale e
parietale
e
nell‘ippocampo,
aree
associate
con
le
funzioni
della
memoria
e
dell‘apprendimento. Il β-amiloide si forma da una molecola, l‘Amyloid precursor protein
(APP), una glicoproteina con funzioni di adesione e integrità della membrana. Enzimi presenti
sulla superficie della membrana tagliano l‘APP formando amiloide ed altri frammenti.
Questo processo avviene in tutti i soggetti. L‘amiloide è presente nel fluido
cefalorachidiano di soggetti sani. I livelli di questa sostanza risultano notevolmente aumentati
nelle persone con malattia di Alzheimer. Mentre la α-secretasi3 produce amiloide, l‘azione
della β- e γ-secretasi produce, partendo dall‘APP, la forma insolubile (β-amiloide), che si
deposita aggregandosi in placche.[4] Le placche così formate attivano astrociti e cellule gliali
a rilasciare citochine e altre proteine di fase acuta che attivano la cascata dell‘infiammazione
con fenomeni di iperfosforilazione proteica, disfunzione neuronale, perdita di sinapsi,
diminuzione del rilascio di neurotrasmettitori (in particolare acetilcolina) e infine morte dei
neuroni.
3
Le α-, β- e γ-secretasi sono tre proteasi, ossia tre enzimi che sottopongono la APP ad un taglio
endoproteolitico.
14
I Grovigli neuro fibrillari
Patognomonici della malattia di Alzheimer sono frequenti nel citoplasma dei neuroni
della corteccia frontale, temporale e parietale, nell‘ippocampo e nell‘amigdala.[4] I grovigli
sono
filamenti
elicoidali
costituiti
da
microtubuli
intracellulari
e
proteina
tau
iperfosforilata.[5]
L’infiammazione
Tutti gli studi fisiopatologici confermano l‘accumulo di microglia intorno alle placche di
β-amiloide.[6] Queste cellule eliminano fibre e prodotti di degradazione cellulare nel cervello,
ma in questo processo rilasciano radicali liberi e citochine che attivano gli astrociti. Questi
ultimi, la popolazione cellulare di maggiore dimensione nel Sistema Nervoso Centrale,
provvedono normalmente al supporto metabolico dei neuroni ma, in questa particolare
situazione, danno avvio alla cascata infiammatoria.[5] Numerosi approcci antinfiammatori
sono stati studiati per trattare la malattia di Alzheimer. Ad alcuni antinfiammatori non
steroidei (FANS) è risultato associato un effetto protettivo sul decorso della malattia. [2]
Diagnosi precoce
Una delle richieste più sentite nella pratica clinica attuale è la possibilità di identificare i
soggetti a rischio di sviluppare la malattia e lo sviluppo di strategie che possano modificare la
progressione dell‘espressione sintomatologica.
I fattori di rischio conosciuti per lo sviluppo della patologia includono l‘età avanzata,
condizioni di malnutrizione, dimensioni ridotte del cranio, traumi cranici pregressi e sesso
femminile. La diminuzione della sensibilità sensoriale con particolare riguardo alla vista e
all‘udito possono condurre il soggetto a perdita della capacità di relazione, depressione con un
aumento di rischio di demenza. Riportare condizioni generali di salute insoddisfacenti è
associato ad un rischio cinque volte maggiore di sviluppare malattia di Alzheimer.[7] Molti
soggetti presentano lievi segni di deterioramento cognitivo ma utilizzano strategie
compensative nelle attività quotidiane. Solo il 20% di questi soggetti andranno incontro a
demenza.[8] Una valutazione standardizzata capace di fornire indicazioni specifiche sullo
sviluppo della malattia di Alzheimer non è ancora disponibile. I test cognitivi proposti su una
popolazione anziana non selezionata producono molti falsi positivi per le differenze culturali,
di scolarità e legate all‘umore del soggetto.[9] Attualmente si considera che i soggetti a
rischio di sviluppare la malattia dovrebbero essere sottoposti ogni 6-12 mesi a valutazioni
cognitive come il Mini-Mental Status Examination o il Clock Drawing Test.[10] Nel caso si
osservi un declino di 3 punti tra una valutazione e l‘altra, i soggetti devono essere considerati
15
a rischio di esordio e valutati per un trattamento.[11] È evidente pertanto l‘importanza di
sviluppare un metodo di diagnosi precoce stabile, riproducibile e per quanto possibile non
inficiato da fattori umani (paziente e medico).
A livello macroscopico, la malattia è caratterizzata da una diminuzione nel peso e nel
volume del cervello, dovuta ad atrofia corticale, visibile anche in un allargamento dei solchi e
corrispondente appiattimento delle circonvoluzioni. Inoltre, come detto in precedenza,
all'interno dei neuroni, una proteina tau, fosforilata in maniera anomala, si accumula in
aggregati neurofibrillari o in ammassi neurofibrillari. Particolarmente colpiti da questo
processo patologico sono i neuroni colinergici, specialmente quelli delle aree corticali,
sottocorticali e, tra queste ultime, le aree ippocampali.
In
particolare
l'ippocampo
interviene
nell'apprendimento
e
nei
processi
di
memorizzazione perciò la distruzione dei neuroni di queste zone è ritenuta essere la causa
della perdita di memoria dei malati. Pertanto le modificazioni delle strutture cerebrali, ed in
particolare dell‘ippocampo potrebbero essere dei buoni markers per una diagnosi precoce
scevra da fattori umani. Questo è possibile oggigiorno grazie all‘analisi delle immagini
strutturali del cervello dei vari pazienti ottenute tramite la MRI.
16
CAPITOLO 2: Risonanza Magnetica (MRI): fisica, tecnologia, e artefatti
La medical imaging è un insieme di tecniche diagnostiche che permettono l‘esplorazione
del corpo umano senza ricorrere alle tradizionali tecniche invasive.
Gli ultimi cento anni sono stati testimoni dell‘inarrestabile sviluppo e miglioramento delle
tecniche di diagnosi, tra le quali rientrano la CT (Computerized Tomography), gli ultrasuoni,
la SPECT (Single-Photon Emission Computerized Tomography), la PET (Positron Emission
Tomography) e la MRI (Magnetic Resonance Imaging).
In generale le immagini acquisite possono essere di tipo strutturale o funzionale. Le prime
permettono l‘analisi di strutture interne del corpo previa ricostruzione dei distretti anatomici .
Le seconde permettono la visualizzazione di processi dinamici e chimici legati al
funzionamento di una particolare regione anatomica presa in esame.
In questo lavoro di tesi si analizzeranno immagini strutturali acquisite tramite Risonanza
Magnetica (RM, oppure MRI, Magnetic Resonance Imaging).
Evoluzione storica dell’MRI
La MRI è una tecnica diagnostica utilizzata principalmente in campo medico per produrre
immagini ad alta definizione di sezioni del corpo umano. Essa si basa sui principi di
Risonanza Magnetica Nucleare (NMR), tecnica spettroscopica usata per avere informazioni di
tipo microscopico, chimico e fisico sulle molecole.
Prima di spiegare il funzionamento della MRI, è utile ripercorrere la sua breve storia [12].
Il fenomeno della risonanza magnetica è stato scoperto, nel 1946, separatamente da Felix
Bloch ed Edward Purcell che per questo condivisero il premio Nobel per la Fisica nel 1952.
Nel periodo tra il 1950 e il 1970 la NMR fu sviluppata e usata principalmente per analisi
molecolari, chimiche e fisiche.
Nel 1971, Raymond Damadian dimostrò, con esperimenti su cavie da laboratorio, che i
tempi di rilassamento magnetico-nucleari dei tessuti sani erano differenti da quelli dei tessuti
tumorali, stimolando così i ricercatori a prendere in considerazione la risonanza magnetica per
la rivelazione delle patologie umane.
Nel 1973, Paul Lauterbur sperimentò per primo, e con successo, la possibilità di fare
imaging con risonanza magnetica utilizzando come "oggetto test" dei piccoli tubi contenenti
acqua. Per la ricostruzione dell'immagine egli usò algoritmi di retroproiezione simili a quelli
17
impiegati nella tomografia assiale computerizzata. Questo portò ad un nuovo strumento di
diagnostica in campo medico: la Risonanza Magnetica per Immagini (MRI).
Fu Richard Ernst nel 1975 a proporre l'utilizzo nell'MRI di un processo di codifica di fase
e di codifica in frequenza e l'impiego della trasformata di Fourier, elementi ancora oggi alla
base delle moderne tecniche di MRI. Un paio di anni dopo, nel 1977, Raymond Damadian
sperimentò tale tecnica sull'intero corpo umano. Nello stesso anno, Peter Mansfield ideò la
tecnica di imaging eco-planare (EPI) che, negli anni successivi, fu ulteriormente sviluppata
per produrre immagini a frequenza video (30 ms/immagine).
1946 MR phenomenon - Bloch & Purcell
Nobel Prize - Bloch & Purcell
1952
NMR
developed as analytical tool
1950
1960
1970
Computerized Tomography
1972
Backprojection MRI - Lauterbur
1973
Fourier Imaging - Ernst
1975
Echo-planar imaging - Mansfield
1977
Nobel Prize - Ernst
1991
Functional MRI
1992
Hyperpolarized 129Xe Imaging
1994
2003 Nobel Prize - Lauterbur & Mansfield
Tabella 1: tabella temporale delle principali scoperte per lo sviluppo della MRI
Nel 1991 Richard Ernst ricevette il premio Nobel per la Chimica per i suoi risultati sulla
spettroscopia NMR con l'uso della trasformata di Fourier.
Il 1992 segnò l'inizio dello sviluppo dell'MRI funzionale (fMRI), una tecnica che
permette di costruire una mappa delle funzioni delle varie regioni del cervello umano. Solo
cinque anni prima molti clinici ritennero che le applicazioni primarie dell'imaging eco-planare
dovessero limitarsi all'imaging cardiaco in tempo reale. Lo sviluppo della fMRI rivelò invece
una nuova applicazione per l'EPI: costruire una mappa delle regioni del cervello responsabili
del controllo del pensiero e del movimento.
Nel 1994, alcuni ricercatori delle Università di Stony Brook e Princeton nello stato di
New York sperimentarono con successo l'imaging del gas
129
Xe iperpolarizzato per studi
respiratori.
Nel 2003 Paul C. Lauterbur dell'Università dell'Illinois e Sir Peter Mansfield
dell'Università di Nottingham ricevettero il premio Nobel per la Medicina per le loro scoperte
nel campo dell'imaging con risonanza magnetica.
18
Questa rapida cronologia evidenzia che l'MRI è una scienza giovane, ma in rapida
evoluzione.
La fisica dell’imaging in Risonanza Magnetica
I paragrafi seguenti riportano alcuni cenni sulle basi fisiche dell‘imaging in RM.
Proprietà magnetiche del nucleo atomico
Il fenomeno della risonanza magnetica (RM) si basa sulla proprietà dei nuclei di
possedere un momento angolare intrinseco detto spin nucleare I.
Lo spin è una grandezza vettoriale e quantizzata che descrive una caratteristica intrinseca
delle particelle elementari.. Può assumere solo valori multipli interi o semi-interi di h/2π, dove
h è la costante di Planck. Il valore assunto dipende dal numero di massa del nucleo: se questo
è pari lo spin può essere intero o nullo, altrimenti assumerà valore semi-intero. Protoni,
elettroni e neutroni presi singolarmente presentano valore di spin pari a 1/2.
Quando differenti particelle elementari formano insieme un atomo, la particella risultante
possiederà sia uno spin elettronico che uno spin nucleare.
Nella risonanza magnetica si fa riferimento allo spin nucleare.
Affinché si verifichi il fenomeno della risonanza magnetica è necessario che il campione
in esame abbia valori di spin non nulli, e in particolare, si considerano solo nuclei con valore
di spin semi-intero. Tra tutti il più importante è il nucleo d‘idrogeno [13]. In quanto
quest‘elemento si trova nella maggior parte dei composti organici, in particolar modo nelle
molecole d‘acqua che costituiscono il 70% dei tessuti organici. Il nucleo di idrogeno, inoltre,
avendo spin semi-intero (½ h/2π) e carica elettrica positiva, ha un momento magnetico (
diverso da zero.
Il momento magnetico nucleare, al pari dello spin, è una grandezza vettoriale e
quantizzata ed è dato da:
μ I
dove la costante di proporzionalità γ è il fattore giromagnetico di Larmor, si misura in MHz/T,
ed è una proprietà caratteristica di ciascun nucleo.
Il modulo del momento magnetico è dato dall‘equazione:
h
2
I ( I 1)
19
con h costante di Planck e I numero quantico di spin.
Dall‘equazione si nota come nuclei con un numero di massa pari, avendo I=0, non possiedono
momento magnetico. Questi nuclei vengono chiamati ―NMR - non attivi‖, in quanto non
interagiscono con un campo magnetico esterno.
Un nucleo con spin I diverso da zero, ha un momento magnetico che può assumere 2I+1
orientamenti, a ciascuno dei quali corrisponde uno stato quantico magnetico mI, che può
assumere valori compresi tra –I e I, e ai quali corrispondono i diversi livelli energetici
permessi.
Interazione dei nuclei con un campo magnetico
In assenza di un campo magnetico esterno, i (2I+1) stati con lo stesso valore di I, ma
diverso numero quantico magnetico, sono degeneri (Figura 1 (a)). Quando, invece, si applica
un campo magnetico esterno, la degenerazione viene rimossa , in quanto si impone al sistema
un ordine che porta la popolazione nucleare a distribuirsi su due o più livelli energetici; ed i
nuclei, assimilabili a piccoli dipoli magnetici, si orientano in modo parallelo o antiparallelo al
campo magnetico applicato (Figura 1 (b)).
Figura 1: (a)In assenza di campo magnetico esterno gli spin sono orientati in modo
disordinato.(b) Esposto a un campo magnetico esterno B0 ogni spin può assumere due orientazioni,
parallela o antiparallela.
È possibile calcolare le energie dei diversi livelli secondo la seguente formula:
E= - μ· B0
(1)
20
in cui μ rappresenta il vettore momento magnetico e B0 il campo magnetico applicato.
Se si considera, in un sistema di assi cartesiano xyz, B0 diretto lungo l‘asse z, la relazione (1)
diventa:
E= -γ mIB0
Nel caso del nucleo di idrogeno si hanno due possibili valori:
Eup= - 1 γ B0
2
Edown= + 1 γ B0
2
La statistica di Boltzmann poi, permette di rappresentare la distribuzione dei nuclei di
idrogeno tra il livello energetico inferiore e superiore in funzione della differenza di energia
ΔE tra questi due stati:
N + / N − = e (ΔE
/ k T)
Con:
N + numero di nuclei allo stato energetico inferiore;
N − numero di nuclei allo stato energetico superiore;
ΔE energia di transizione tra i due stati;
k
costante di Boltzmann;
T
temperatura assoluta espressa in Kelvin.
La differenza di energia ΔE tra i due stati quantici magnetici fornisce informazioni
sull‘energia che bisogna fornire al sistema per ottenere una transizione quantica:
ΔE=Edown - Eup = γ B0
Si nota come la differenza di energia risulti essere proporzionale al fattore giromagnetico e al
campo magnetico applicato.
La radiazione assorbita dal sistema ha frequenza pari a
0
B0
2
Questa relazione prende il nome di equazione di Larmor e rappresenta l‘equazione
fondamentale che descrive la fisica della risonanza magnetica nucleare.
Il fattore giromagnetico per i nuclei di idrogeno vale circa 42 MHz/T, questo vuol dire
che, in presenza di campi magnetici compresi tra 0.5T e 1.5T (queste sono le intensità dei
21
campi magnetici delle macchine di uso diagnostico), le frequenze di risonanza sono comprese
tra 21 e 63 MHz, rientrano quindi nel range delle radiofrequenze (10-100MHz).
Classicamente i protoni ruotano intorno al proprio asse e in presenza di un campo
magnetico B0, subiscono una forza torcente, o momento di rotazione:
τ μ B0
producendo un moto di precessione attorno all‘asse del campo magnetico applicato.
Figura 2:rappresentazione della precessione di Larmor del momento magnetico µ
La velocità angolare ω0 di questo moto è:
0 B0
quindi la frequenza di precessione, denominata anche frequenza di Larmor, risulta:
0
B0
2
I protoni possono orientarsi, rispetto a B0, in modo parallelo o antiparallelo. In condizioni
di equilibrio, il numero di protoni paralleli è lievemente superiore rispetto al numero di
protoni antiparalleli.
Questa piccola prevalenza produce una magnetizzazione risultante M.
Magnetizzazione macroscopica
Data la difficoltà che si riscontra nel descrivere il fenomeno della NMR in scala
microscopica, risulta conveniente una descrizione macroscopica. In questa visione , il sistema
22
dei nuclei viene sostituito con un vettore di Magnetizzazione Macroscopica M, allineato
parallelamente al campo magnetico esterno ed esprimibile, nel caso di un campione costituito
da N nuclei, dalla seguente relazione:
M
N
μ
i 1
i
All‘equilibrio M ha un valore massimo corrispondente a M0. La componente di M lungo
z, (parallela al campo magnetico B0) è denominata Magnetizzazione Longitudinale (Mz). Non
esiste alcuna componente di M sul piano trasversale a causa dello sfasamento del moto di
precessione dei nuclei intorno a B0.(Figura 3)
Figura 3: Magnetizzazione Longitudinale
Applicando un secondo campo magnetico B1, ortogonale a B0 ed oscillante alla frequenza di
Larmor, tutti i momenti magnetici che prima precedevano fuori fase, risulteranno in coerenza
di fase. Questa coerenza di fase fa si che M inizi a precedere attorno all‘asse z, sempre con la
frequenza di Larmor. Di conseguenza M avrà una componente nel piano xy, detta
Magnetizzazione Trasversale Mxy.
Durante l‘invio di un impulso di radiofrequenza (RF) il valore della Magnetizzazione
Longitudinale diminuisce, mentre quello della Magnetizzazione Trasversale aumenta, l‘entità
di questo scambio è proporzionale alla durata dell‘impulso RF.
Figura 4: Magnetizzazione Trasversale dopo l’invio di un impulso RF
23
Quando l'impulso RF è interrotto, il sistema tende a tornare nella sua condizione di equilibrio,
cedendo all'ambiente esterno l'energia precedentemente assorbita sotto forma di onda
elettromagnetica.[14]
Nel processo di ritorno al valore di equilibrio (Mz=M0), la Magnetizzazione trasversale si
attenua in maniera esponenziale e oscilla con una frequenza pari a quella di Larmor.
In questo modo, secondo la legge di Faraday-Neumann dell'induzione elettromagnetica,
si induce una corrente elettrica alternata in una bobina ricevente posta sul piano trasversale a
MZ, in quanto il campo che la genera è oscillante. Il processo dura per tutto l'intervallo di
tempo necessario alla Magnetizzazione trasversale per ritornare al suo valore di equilibrio.
Figura 5: rappresentazione di un segnale FID
Questo fenomeno, denominato FID (Free Induction Decay), permette la formazione delle
immagini di RMN. (Figura 5)
Fenomeni di rilassamento
L‘interruzione dell‘impulso a RF, come precedentemente accennato, comporta un
decadimento esponenziale del segnale, questo è dovuto al ritorno degli spin al livello
energetico iniziale e alla perdita di coerenza di fase. [13] Tali processi causano una
diminuzione della componente macroscopica trasversale Mxy, (rilassamento spin-spin), e un
ritorno della componente longitudinale Mz al suo valore di equilibrio, (rilassamento spinreticolo).
Nel rilassamento spin-spin, denominato anche rilassamento trasversale, i protoni perdono
la loro coerenza di fase a causa dell‘interruzione dell‘impulso RF. Questo processo è dovuto
all‘interazione tra momento magnetico intrinseco di un nucleo e quello dei nuclei vicini.
24
Idealmente il campo magnetico applicato dovrebbe essere spazialmente omogeneo, in
realtà però presenta disomogeneità. Inoltre gli spin generano campi magnetici aggiuntivi, che
si sommano o si sottraggono al campo magnetico esterno in modo diverso a seconda della
loro distribuzione spaziale nel reticolo.
Gli spin, quindi, sono soggetti ad un campo magnetico locale variabile, che produce una
differenzazione delle frequenze di precessione dei singoli nuclei e di conseguenza uno
sfasamento degli spin, con relativa perdita di coerenza di fase. In questo modo la
magnetizzazione trasversale diminuisce secondo la seguente legge:
M xy (t) = M xy (t = 0) e -t/T2
dove:
Mxy(t) è la magnetizzazione trasversale residua al tempo t;
Mxy(t=0) è la magnetizzazione trasversale iniziale (al termine dell‘impulso);
T2 è la costante di rilassamento trasversale che regola il processo, questa rappresenta il
tempo necessario a ridurre la magnetizzazione trasversale del 37% del suo valore
iniziale. Se si tiene conto del solo effetto della mutua interazione dei nuclei si parla di
T2 puro; quando, invece, si tengono in considerazione anche le disomogeneità del
campo esterno si parla di T2 disomogeneo, ed il valore di T2 viene indicato con T2*.
Esso è legato al tempo di rilassamento trasversale puro dalla seguente relazione:
B0
1
1
*
2
T2 T2
in cui ΔB0 è la variazione del campo magnetico dovuta alle disomogeneità.
Figura 6: curva di rilassamento T2
Fisicamente T2 dipende dalle caratteristiche chimico-fisiche della sostanza analizzata;
quindi i tessuti biologici presentano valori diversi che sono influenzati dalla composizione
25
chimica e da proprietà fisiche, quali la temperatura e lo stato di aggregazione. Ad esempio i
liquidi sono caratterizzati da un valore di T2 elevato, in quanto i protoni dei nuclei conservano
la coerenza di fase più a lungo poiché le molecole hanno ampia libertà di movimento. In
questo modo la magnetizzazione trasversale diminuisce lentamente ed il relativo segnale è
elevato. Invece il tessuto adiposo presenta un valore di T2 molto basso e quindi produce un
segnale poco intenso. Dalla misura dei diversi segnali provenienti da tessuti differenti è
possibile individuare e differenziare i tessuti in esame.
Le immagini ottenute con questo metodo vengono chiamate immagini T2 pesate.
Il rilassamento spin-reticolo, conosciuto anche come rilassamento longitudinale, si
osserva quando i nuclei, a causa dell‘interruzione del segnale RF, ritornano al loro stato di
energia fondamentale cedendo energia all‘ambiente esterno.
A causa di questo processo si nota un aumento esponenziale della magnetizzazione
longitudinale secondo la seguente relazione:
M z (t) = M z (t = 0) (1 - e -t/T1 )
in cui:
Mz(t) è la magnetizzazione longitudinale residua al tempo t;
Mz(t=0) è la magnetizzazione longitudinale iniziale (al termine dell‘impulso);
T1 è la costante di rilassamento longitudinale che regola il processo, questa
rappresenta il tempo necessario a ridurre la magnetizzazione longitudinale del 63% del
suo valore iniziale.
Figura 7: curva di rilassamento T1
Fisicamente T1 dipende dal‘interazione tra i nuclei di idrogeno e l‘ambiente circostante.
Nei liquidi la costante di rilassamento T1 ha un valore elevato e quindi un segnale basso, a
causa della scarsa interazione tra le molecole. I tessuti adiposi, invece, presentano un valore di
26
T1 basso, ma segnale elevato, in quanto le molecole che li compongono sono dotate di moti
molecolari con frequenza uguale a quella di precessione.
È importante osservare che per uno stesso tessuto T1 è sempre maggiore di T2; e in
generale vale:
T1gas T1liquido T1solido
T2 gas T2liquido T2 solido
Si riportano in Tabella 2 i valori di T1 e di T2 per alcuni tessuti biologici:
Tessuto
T1 (ms)
T2 (ms)
Muscolo scheletrico
732 ± 132
47 ± 13
fegato
423 ± 93
43 ± 14
Rene
589 ± 159
58 ± 24
Tessuto adiposo
241 ± 68
84 ± 36
Cervello:materia grigia
813 ± 138
101 ± 13
Cervello:materia bianca
683 ± 116
92 ± 22
Tabella 2: Tempi di rilassamento T1 e T2 per differenti tessuti biologici
Sequenze di acquisizione
Il segnale ottenuto con un singolo FID risulta molto basso ed inoltre presenta un basso
segnale/rumore, per ovviare a questo problema si utilizzano nella pratica clinica sequenze di
impulsi, ossia più impulsi in successione rapida. Esistono numerosi tipi di sequenze, ognuna
in grado di fornire informazioni differenti in relazione al tipo di applicazione richiesta.
Saturation Recovery
Nella sequenza Saturation Recovery (SR) vengono applicati ripetuti impulsi a 90º,
distanziati da un tempo di ripetizione TR. Il tempo di ripetizione determina il contrasto
dell‘immagine.
Se si sceglie un TR lungo, in modo da far tornare la magnetizzazione macroscopica al suo
valore iniziale per tutti i tessuti coinvolti nell‘esame, il contrasto dell‘immagine dipende solo
dalla densità protonica.
27
Se, invece, si sceglie un TR breve, il contrasto dipende dalla diversa velocità con cui la
componente longitudinale della magnetizzazione ritorna al suo valore nei diversi tessuti. Il
contrasto in queste immagini è più netto e dipende dai diversi valori di T1 nei tessuti biologici.
Figura 8: sequenza saturation recovery
Inversion Recovery
Nella sequenza di Inversion Recovery viene applicato, perpendicolarmente alla direzione
del campo magnetico principale, un impulso a 180° seguito, dopo un tempo TI ( tempo di
inversione), da un impulso a 90°. Successivamente, dopo un tempo pari a TR, la sequenza
viene ripetuta. Il tempo di inversione determina il contrasto nelle immagini, infatti
selezionando TI in modo opportuno è possibile sopprimere il segnale proveniente da un
determinato tessuto.
Figura 9: sequenza inversion recovery
Si ottengono in questo modo immagini T1- pesate con un ottimo contrasto, dalle quali è
possibile evidenziare piccole differenze in T1 tra i tessuti.
28
Spin Echo
La sequenza Spin Echo (SE) si ottiene inviando due impulsi di RF: il primo a 90° ed il
secondo a 180°.
Figura 10: sequenza spin echo
Il primo impulso ruota la magnetizzazione longitudinale sul piano trasversale (x,y), la
magnetizzazione trasversale inizia così a perdere la coerenza di fase. Dopo un intervallo di
tempo t (pari a TE/2), viene inviato un secondo impulso RF a 180° che ribalta i momenti
magnetici sullo stesso piano, in tal modo gli spin tornano in fase generando un segnale echo al
tempo TE (tempo di echo). Tale eco non risulta affetto da fenomeni di disomogeneità di
campo magnetico e la distanza temporale fra l‘applicazione degli impulsi di eccitazione e la
sua formazione ne consentono una più agevole registrazione.
La sequenza SE viene ripetuta dopo un tempo TR. La scelta dei parametri TE e TR
determina il contrasto delle immagini finali e le loro caratteristiche; infatti è possibile,
variando questi due parametri, ottenere immagini T1- pesate, T2- pesate o a densità protonica.
(Tabella 3)
29
Tipo di
TE
TR
Esempio di
immagine
(ms)
(ms)
immagine
densità protonica
breve
lungo
(10-30)
(>1800)
breve
breve
(10-30)
(300-600)
lungo
lungo
(>80)
(>1800)
T1-pesata
T2- pesata
Tabella 3: intervallo di valori per la classificazione dei parametri tecnici usati per ottenere immagini
il cui contrasto dipende da T1, T2 o dalla densità protonica
Mezzi di contrasto
In risonanza magnetica vengono utilizzati, molto spesso, mezzi di contrasto,
comunemente denominati magnetofarmaci, che modificano temporaneamente le proprietà
magnetiche di aree del corpo umano agendo sulle costanti di tempo T1 e T2. I mezzi di
contrasto non possiedono un segnale proprio ma modificano il segnale dei tessuti in cui si
depositano, ricoprendo il ruolo di accettori energetici e di disomogeneizzanti del campo
magnetico. Essi quindi riducono i tempi di rilassamento fornendo immagini con contrasti più
netti.
Struttura di un apparecchiatura MRI
Uno scanner di Risonanza Magnetica per Immagini è principalmente composto da quattro
elementi:
30
Magnete principale: utilizzato per creare un campo magnetico statico ed omogeneo
ad elevata intensità che permetta la polarizzazione dei nuclei. È il componente più
importante di uno strumento di RM e dalle sue caratteristiche dipende la qualità delle
immagini restituite.
Un buon magnete deve avere un‘elevata intensità di campo magnetico, da cui deriva la
maggiore polarizzazione degli spin. Inoltre deve presentare una buona omogeneità
spaziale e una buona stabilità temporale.
I primi magneti utilizzati sono stati quelli permanenti, ossia blocchi di materiale
ferromagnetico magnetizzati in modo permanente. A causa della loro ingente
dimensione (arrivano a pesare anche 100 T), della limitata intensità di campo
magnetico (<0,3 T) e alla non eccellente stabilità nel tempo ed omogeneità, questo
tipo di magnete è stato sostituito da un magnete di tipo resistivo. In questo caso il
campo magnetico generato da una bobina attraversata da corrente possiede un valore
d‘intensità (fino a 0,6 T) più adatto alle misure di risonanza magnetica.
Dagli anni Novanta si è iniziato ad utilizzare magneti superconduttivi. Questa nuova
generazione di magneti, è in grado di fornire intensità di campo molto elevate (oltre 4
T), oltre ad un‘alta omogeneità di campo e una buona stabilità temporale.
Bobine di gradiente: create per generare campi magnetici che variano linearmente
nello spazio. Queste sono fondamentali per la localizzazione dell‘area da esaminare e
per la ricostruzione dell‘immagine. I gradienti di campo sono ottenuti facendo passare
corrente elettrica attraverso le bobine. Le caratteristiche necessarie affinché una
bobina possa essere considerata di buona qualità sono rappresentate da un‘elevata
intensità e linearità, e da una rapida e controllata variazione temporale.
Le bobine di gradiente dei primi tomografi possedevano una variazione spaziale di
10mT/m, mentre la variazione spaziale delle bobine attuali è pari a 40-60 mT/m,
permettendo così l‘acquisizione di slice più sottili e quindi di informazioni più
dettagliate.
Bobine a radiofrequenza (RF): usate per eccitare il sistema di spin tramite l‘invio di
impulsi a radiofrequenza e per raccogliere l‘informazione proveniente dal campione
sotto forma di onda elettromagnetica. Il sistema è costituito da una bobina
trasmittente, capace di creare un campo magnetico intenso ed omogeneo per un breve
periodo, e da una bobina ricevente con un‘elevata sensibilità, in modo da captare
anche segnali molto bassi.
31
Parte elettronica ed informatica: questo componente presenta un‘elevata importanza
in ogni strumento MRI, in quanto l‘imaging di risonanza magnetica richiede
considerevoli risorse di calcolo. La potenza di calcolo a disposizione permette di
ottenere e di manipolare immagini senza tempi morti e consente acquisizioni in tempo
reale e ricostruzioni tridimensionali. Tutte queste funzioni si ottengono utilizzando la
stessa consolle di acquisizione, che presenta un‘interfaccia di facile intuizione.
Figura 11: schema a blocchi di un apparecchiatura per MRI
Artefatti
Nelle immagini di MRI si presentano vari artefatti, con questo termine si vuole indicare
una qualsiasi caratteristica che appare nell‘immagine, ma che non è presente nell‘oggetto in
esame.[15] In altre parole l‘artefatto può essere definito come un sottoinsieme di pixel o voxel
che non rappresenta fedelmente l‘anatomia studiata.
Queste alterazioni possono essere generate o da sorgenti esterne al paziente o dal paziente
stesso.
Quest‘ultimi possono essere dinamici o statici. Gli artefatti statici sono indotti
dall‘interazione del campo magnetico con entità estranee, mentre quelli dinamici sono causati
da processi o proprietà naturali del corpo umano, quali movimenti cardiaci, respiratori o dal
flusso sanguigno.
Gli artefatti esterni sono invece causati da interferenze con il campo magnetico o dal
funzionamento errato dell‘apparecchiatura stessa.
32
Fondamentale è saper riconoscere e correggere questi problemi poiché possono
nascondere e, quindi, compromettere l‘accertamento di una patologia; producendo falsi
negativi (regione malata non identificata come patologica) o falsi positivi (regione sana
erroneamente segnata come malata).
Si riporta di seguito le origini degli artefatti più significativi.[12]
Rumore RF
L‘artefatto da rumore RF è causato da un malfunzionamento nello schermo RF, il cui
scopo è quello di evitare che il rumore esterno possa raggiungere il rivelatore. Il modo in cui
questo si manifesta nell'immagine dipende dalla sorgente del rumore ed in quale parte del
segnale il rumore ha avuto effetto.
Figura 12: immagine con due artefatti da rumore RF rappresentati da linee diagonali e due linee
orizzontali segnalate con delle frecce
Disomogeneità di campo magnetico Bo
La disomogeneità del campo B0 è la causa di immagini distorte. Le distorsioni possono
essere di intensità, spaziali o di entrambe.
Questa disomogeneità del campo può essere prodotta dalla presenza di campi magnetici
generati dagli spin, che si vanno a sommare o a sottrarre al campo magnetico esterno in modo
differente a seconda della distribuzione spaziale degli spin nel reticolo.
Gradienti
Gli artefatti derivanti da problemi con il sistema dei gradienti sono molto simili a quelli
descritti per la disomogeneità di Bo. Un gradiente non costante rispetto alla direzione cui
33
agisce distorcerà l'immagine. Questo, tipicamente, può aver luogo se è stata danneggiata una
bobina di gradiente.
Figura 13 distorsione di un’immagine dovuta ad un gradiente non uniforme.
Disomogeneità di RF
Un artefatto da disomogeneità della RF si manifesta con un‘ indesiderata variazione di
intensità attraverso l'immagine. La causa può essere sia una disomogeneità del campo B1 che
una non uniforme sensibilità delle bobina ricevente. Alcune bobine di RF, come le bobine di
superficie, hanno naturalmente variazioni di sensibilità e mostrano sempre questo artefatto.
La presenza di questo artefatto in altre bobine rappresenta il guasto di un elemento nella
bobina di RF o la presenza di materiale metallico nell'oggetto esaminato. Ad esempio, un
oggetto metallico che impedisce il passaggio della RF attraverso un tessuto comporterà la
mancanza di segnale nell'immagine.
Figura 14: immagine rappresentante un artefatto da disomogeneità della RF nella regione della
bocca.
34
Suscettività magnetica
La suscettibilità magnetica () di una sostanza è la misura di quanto viene magnetizzata
questa sostanza una volta posta all‘interno di un campo magnetico [15]. Gli artefatti da
suscettibilità si rilevano quando tessuti o materiali con differente sono tra loro adiacenti
provocando una disomogeneità del campo magnetico locale.
L'immagine in figura15 mostra una regione con un campo magnetico omogeneo nel quale
è stato posto un oggetto con un'alta suscettività magnetica.
Figura 15: variazione delle linee di forze di un campo magnetico nel quale è posto un oggetto con
alta suscettività.
Il risultato è che le linee di forza curvano all'interno dell'oggetto, causando la variazione
del valore del campo al variare della posizione intorno all'oggetto esaminato. La distorsione si
ripercuote sul campo magnetico a radiofrequenza B1, su quello statico B0, e sui gradienti di
campo. Quest‘artefatto può essere causato da metalli come titanio o acciaio presenti
all'interno del corpo.
Movimento
Gli artefatti da movimento sono dovuti alla variazione della posizione dell'oggetto in
esame o ad una sua piccola parte.
Il movimento di tutto l'oggetto produce l'offuscamento dell'intera immagine ad opera di
"immagini fantasma" nella direzione di codifica di fase. Mentre la variazione di posizione di
una parte dell'oggetto esaminato provoca l'offuscamento nell'immagine di quella porzione
dell'oggetto.
Si mostra in Figura 16 l‘immagine MRI della testa di un soggetto che, durante
l'acquisizione, ha mosso la testa nella direzione superiore-inferiore.
35
Figura 16: scansione di una testa che durante l’acquisizione è stata mossa
La soluzione per un artefatto da movimento è quella di immobilizzare il paziente o
l'oggetto esaminato. Spesso il movimento è dovuto al battere del cuore o al respiro del
paziente.
Volume Parziale
Questo difetto si presenta quando le dimensione del voxel dell‘immagine è maggiore
della dimensione del dettaglio che si deve esaminare, e quindi si manifesta quando uno stesso
voxel è occupato da più di un tipo di tessuto. L‘intensità risultante è allora un miscuglio dei
valori associati a questi tessuti, si ottiene in questo modo una bassa risoluzione
dell‘immagine.
In figura 17 si riportano due scansioni della stessa sezione della testa la prima acquisita
con uno spessore di fetta di 3 mm e la seconda con uno spessore di 10mm.
Figura 17: a sinistra si riporta la scansione di una sezione della testa con spessore 3 mm, a destra la
stessa sezione della testa ma con uno spessore di 10 mm
36
CAPITOLO 3: Il problema delle disomogeneità di scala di grigi in MRI
La risonanza magnetica (MRI), della quale il capitolo precedente ha esposto le basi
fisiche e strumentali, ha rivoluzionato l‘imaging radiologico per lo studio, l‘analisi e la
diagnosi di strutture interne del corpo umano, fornendo informazioni sull‘anatomia dei tessuti.
Rispetto ad altre tecniche di diagnostica per immagini presenta numerosi vantaggi: non è
invasiva e non è considerata dannosa per la salute del paziente; inoltre restituisce immagini
delle sezioni corporee su tre piani diversi: assiale (piano di imaging perpendicolare all'asse
passante lungo il corpo), coronale (piano che biseca il corpo in parte anteriore e parte
posteriore) e sagittale (piano che biseca il corpo in parte destra e parte sinistra), permettendo
al medico l‘esame visivo ottimale dei tessuti.
Figura 18: rappresentazione delle sezioni corporee sui tre piani diversi:assiale, coronale e sagittale.
Attualmente sono disponibili molti protocolli MRI, con o senza l‘ausilio di agenti di
contrasto, ad esempio T1 con o senza agente di contrasto, T2 con o senza agente di contrasto,
densità protonica (Pd), etc.[16] Tutti questi protocolli permettono la realizzazione di immagini
con differenti contrasti per i vari tessuti di uno stesso organo; in particolare si ottiene un
eccellente contrasto per i tessuti molli, e proprio per questo motivo la tecnica MRI è adatta
allo studio del cervello.
Il risultato di un‘acquisizione in MRI è un‘immagine tridimensionale in toni di grigio
(solitamente alcune migliaia di livelli) di risoluzione variabile: tipicamente per le neuro
immagini, caso di interesse di questa tesi, si ottengono volumi di un centinaio di slice (‗fette‘
o ‗sezioni‘) ciascuna di 128x128 o 256x256 pixel (o valori intermedi). Le dimensioni del
voxel (volume element) sono dell‘ordine di 1 mm nella migliore delle ipotesi e nel piano della
37
slice ma, nella direzione ortogonale alla fetta (in genere, nelle neuro immagini, quella assiale
testa-piedi), questa dimensione spesso è maggiore, anche dell‘ordine di 2 mm o più.
L‘esistenza di diversi schemi di acquisizione, ma anche alcuni fattori insiti nella tecnica
di imaging in risonanza magnetica, comporta un problema non trascurabile: le intensità dei
pixel di un immagine MRI non hanno un valore assoluto fissato per specifici tessuti, per cui le
scale di grigi non sono direttamente rapportabili ai tessuti tipici dei vari comparti
dell‘organismo esaminato. Nel caso particolare delle neuro immagini ciò comporta, ad
esempio, che dal valore di grigio di un pixel non si può dedurre in maniera diretta il tipo di
materia cerebrale corrispondente (bianca o grigia o fluido cerebrospinale, etc).
L‘inconveniente della mancanza di una scala assoluta assume rilevanza quando si
confrontano acquisizioni ottenute con dispositivi differenti, o con lo stesso dispositivo ma in
momenti differenti. Inoltre esso si può verificare nella stessa acquisizione tra una fetta e
un‘altra dell‘immagine, e addirittura all‘interno della stessa fetta.
Queste variabilità delle scale di intensità possono essere distinte in due differenti gruppi
[17, 18]: nel primo, indicato nel seguito con il termine CLASSE I, rientrano le variabilità di
scala di grigi all‘interno della medesima fetta o tra una slice e l‘altra di una scansione. In
letteratura questo problema è chiamato propriamente inomogeneità dell’intensità o anche
campo di bias.
Il secondo tipo di variabilità della scala dei livelli di grigi, denominato nel seguito
CLASSE II, è relativo alla variazione dei valori dell‘intensità corrispondenti ad un particolare
tessuto in immagini di pazienti differenti, ma anche nelle acquisizioni di uno stesso paziente
ottenute con lo stesso scanner e con lo stesso protocollo, ma in momenti differenti. A causa
della variabilità di scala dei grigi in MRI, diversamente da altre modalità di imaging come la
tomografia assiale computerizzata, una certa intensità misurata non può dunque essere
associata ad uno specifico tipo di tessuto (o a una classe di tessuti, ma comunque in maniera
univoca e ripetibile). La soluzione di questo problema, in letteratura, prende genericamente il
nome di standardizzazione delle intensità.
CLASSE I: Inomogeneità dell’intensità
Il problema dell’inomogeneità dell’intensità, detta anche campo di bias o non uniformità
dell‘intensità, è usualmente riscontrabile nelle immagini come una lenta variazione di
38
intensità di grigio di uno stesso tessuto sull‘intero dominio dell‘immagine stessa (entro la
slice, o tra una slice a l‘altra).[19] Le cause possono essere divise in due gruppi.
Nel primo rientrano quelle dovute alle proprietà del dispositivo di MRI, in particolare
l‘inomogeneità del campo magnetico statico, la larghezza di banda adoperata nel filtraggio dei
dati, le correnti parassite indotte dai gradienti del campo e soprattutto la non-uniformità della
trasmissione e ricezione delle radiofrequenze (RF). Queste inomogeneità possono essere
corrette calibrando la strumentazione MRI con l‘ausilio di un fantoccio o attraverso modelli
matematici.
Nel secondo gruppo rientrano le cause legate al soggetto dell‘immagine, alla sua forma,
alla posizione ed all‘orientazione all‘interno del magnete, alle proprietà dielettriche e alla
permeabilità magnetica specifica del soggetto. La non uniformità delle intensità dovuta a
questi motivi è difficile da trattare. Si osserva che l‘impatto del soggetto in esame è piuttosto
piccolo se il valore del campo magnetico è basso, ed è elevato se il valore del campo è molto
alto.
La presenza del campo di bias può ridurre significativamente l‘accuratezza della
segmentazione e della registrazione dell‘immagine, e quindi comportare una diminuzione
dell‘attendibilità delle successive misure quantitative.
Un‘immagine con un alto campo di bias è rappresentata nella Figura 19, da cui si può
notare come l‘intensità varia significativamente per i pixel corrispondenti ad uno stesso
tessuto. Una volta calcolato il campo di bias, esso può essere adoperato per la correzione
dell‘immagine.
L‘inomogeneità delle intensità non sempre è evidente per un osservatore umano, ma molti
metodi di analisi di immagini mediche sono altamente sensibili a queste false variazioni di
intensità. Proprio per questo motivo è importante avere degli algoritmi per la correzione di
questo artefatto.
Nella Tesi questo problema non verrà trattato, in quanto vi sono già dei software che
effettuano automaticamente la correzione. Sarà però necessario adoperare questi software nella
parte applicativa, in quanto la rimozione del campo di bias è conditio sine qua non per la
riuscita degli algoritmi di coregistrazione, segmentazione, e standardizzazione degli
istogrammi di intensità, descritti nei prosieguo della Tesi.
39
(a) Immagine originale
(b) Campo di Bias
(c) Immagine corretta
Figura 19: inomogeneità dell’intensità in un’immagine MR del cervello
CLASSE II: Standardizzazione dell’intensità
Teoricamente in un‘immagine, dopo aver applicato con successo un algoritmo per la
correzione del campo di bias, tutte le classi di tessuto con lo stesso segnale di intensità
dovrebbero avere identici range di valori di grigi. Come anticipato, sfortunatamente questo
risultato non si verifica, perciò non è possibile assegnare un significato anatomico alle
intensità osservate.
Questo problema si evidenzia sia nelle immagini di pazienti differenti ottenute con lo
stesso protocollo MRI ma con macchinari diversi, sia nelle immagini acquisite con lo stesso
dispositivo ma in momenti differenti.
Della soluzione al problema si occupa la restante parte della Tesi.
La mancanza di una scala d‘intensità standard causa molte difficoltà nella visualizzazione
e nell‘analisi dell‘immagine. [16] Ad esempio non è possibile rappresentare le immagini in
una finestra di grigi regolata in anticipo, ma bisogna adattarle quest‘ultima manualmente per
ogni nuovo caso, e un confronto accurato tra immagini diverse risulta sempre difficoltoso e
parzialmente soggettivo. Sarebbe invece opportuno che, per gli stessi protocolli, le immagini
risultanti fossero simili tra loro, sia a vantaggio del radiologo che le esamina, sia per il
trattamento automatico attraverso programmi di elaborazione quali i sistemi CAD (Computer
Assisted Detection). Per questo motivo si potrebbe pensare di incorporare uno
standardizzatore nel flusso di acquisizione o durante il processamento di un immagine. Esso
potrebbe essere inglobato nel dispositivo di imaging che, durante il tempo di acquisizione,
sarebbe dunque capace di produrre immagini già standardizzate, o potrebbe essere usato in
una fase successiva di post-processamento.
40
A differenza del problema dell‘inomogeneità delle intensità (campo di bias), che è stato
ampiamente studiato e per il quale esistono svariate soluzioni, la standardizzazione non ha
ricevuto la stessa attenzione, nonostante la sua soluzione sia altrettanto importante e
necessaria.
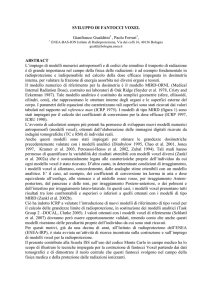
Figura 20: inomogeneità inter e intra scansione. Riga superiore: a sinistra si mostra una scansione
originale di un paziente, a destra la stessa scansione dopo aver corretto il campo di bias. Riga
inferiore: si riportano le scansioni di due pazienti differenti: si nota che stesse zone anatomiche
presentano valori di intensità differenti.
La relazione tra il problema del campo di bias, e la mancanza di un segnale di intensità
standardizzato, può essere osservata in Figura 20, da cui si può constatare come gli algoritmi
di correzione dell‘inomogeneità influenzino il segnale delle intensità localmente, mentre i
metodi di standardizzazione debbano variare l‘intensità globalmente.[18]
41
Metodi per la standardizzazione dell’intensità: breve rassegna
In questo paragrafo si illustrano alcuni metodi per la standardizzazione delle intensità,
reperibili in letteratura.
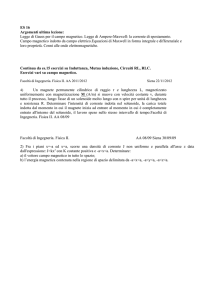
Standardizzazione tramite landmark
Il metodo proposto da Nyul et al., [16, 20] è basato sull‘analisi degli istogrammi
unidimensionali dei livelli di grigio delle immagini da standardizzare, e sull‘applicazione di
una funzione lineare a tratti ai valori di grigio dei voxel, che trasforma gli istogrammi in modo
che siano tra loro simili.
In questo approccio al problema, le immagini vengono dunque modificate attraverso un
processo non lineare con lo scopo di ottenere immagini finali simili tra loro nel senso della
distribuzione dei grigi, ossia in cui tutte le immagini, indipendentemente dai pazienti e dalla
specifica marca dei dispositivi MRI utilizzati per l‘acquisizione, sono trasformate in modo
tale che, per un determinato protocollo e per una specifica regione del corpo, intensità simili
potranno essere associate ad uno stesso tessuto anatomico.
Il procedimento è diviso in due fasi, nel primo step si individuano dei landmark
(parametri di riferimento) su un set di istogrammi utilizzati come training. I landmark
vengono poi mediati per generare un set di parametri da impostare come standard. Nella
seconda fase, sia le immagini usate per individuare i landmark standard (medi), che le nuove
immagini in seguito acquisite, sono standardizzate mappando i loro landmark sulle posizioni
standard precedentemente calcolate.
In un primo lavoro il parametro di riferimento utilizzato per la trasformazione era
individuato dalla moda dell‘istogramma; se l‘istogramma presentava più di un massimo
relativo, tutti i punti di massimo erano presi in considerazione. In uno studio successivo è
stato dimostrato che la moda non è un landmark robusto, e quindi è stata proposta una
variante in cui la moda è sostituita dalla mediana e da altri percentili.
Questo metodo è stato valutato su neuroimmagini, ma può anche essere applicato ad altre
regioni del corpo. Naturalmente per ogni nuova regione o nuovo protocollo di acquisizione
devono essere identificati i parametri (landmark) appropriati.
Siccome il metodo qui accennato è alla base di quello proposto in questa Tesi, esso verrà
trattato in dettaglio al termine di questa breve rassegna.
42
Miscela di gaussiane
Un altro criterio di standardizzazione basato sullo studio degli istogrammi è stato
proposto da Pierre Hellier.[21] Questo metodo è, così come quello descritto in precedenza,
completamente automatico..
Il metodo consiste nello stimare una miscela di gaussiane che approssima l‘istogramma
delle intensità (supponendo che ciascun tipo di materia sia descrivibile con una distribuzione
gaussiana) e nel calcolare la correzione parametrica dell‘intensità necessaria per allineare
l‘intensità media dei tessuti anatomici.
Date due immagini I1 e I2 e i rispettivi istogrammi h1 e h2, l‘obiettivo è stimare una
funzione di correzione f tale che i corrispondenti tessuti anatomici di f (I1) e f (I2) abbiano la
stessa intensità, ossia tale che l‘intensità corrispondente alla materia grigia (GM), alla materia
bianca (WM) e al liquido cerebrospinale (CSF) relativi a f (I1) coincidano rispettivamente con
l‘intensità di GM, WM e CSF associati a f (I2).
Per assicurare la coerenza, si stima una miscela di n distribuzioni Gaussiane che
modellano i due istogrammi h1 e h2 utilizzando un algoritmo iterativo.
Nel caso dello studio di immagini del cervello si utilizzano usualmente cinque
distribuzioni gaussiane che modellano le principali classi che si riscontrano nell‘immagine: lo
sfondo, CSF, GM, WM e grasso.
Per ogni classe di tessuto k, si ottiene il centro della distribuzione µk per l‘immagine I1 e νk
per I2.
Successivamente, per allineare le intensità dei tessuti anatomici e per interpolare la
correzione, si considera una funzione di correzione polinomiale di grado p, che viene
applicata al valore x del grigio dei pixel:
p
f p ( x) i x i
i 0
dove i coefficienti 𝜃𝑖 sono stimati in modo da minimizzare la seguente funzione di costo
secondo il tipico schema di un problema ai minimi quadrati:
n
( f
k 1
p
(k ) k ) 2
La funzione di correzione così trovata, essendo polinomiale, è una mappatura smooth.
Quest‘approccio è ristretto alla sola regione della testa, in quanto solo in questa regione si
possono distinguere classi di tessuto in numero così limitato.
43
Minimizzazione della divergenza di Kullback-Leibler
Bergeest e Jäger [22] propongono un metodo combinato per la correzione delle
inomogeneità e la standardizzazione delle intensità. Esso si basa sulla stima di un campo di
correzione moltiplicativo che adatta le statistiche delle intensità di grigi di un volume MR ad
un modello precedentemente acquisito. Come modello si utilizza l‘istogramma di
un‘immagine acquisita in precedenza con opportune proprietà.
In questo processo si modella dapprima la presenza della variazione d‘intensità (campo di
bias) attraverso l‘espressione:
O FI n
In cui si indica con:
O l‘immagine osservata, da correggere, affetta da un campo moltiplicativo F e da
rumore n;
F la correzione moltiplicativa dell‘intensità (che agisce singolarmente sui pixel);
n il rumore;
I l‘immagine corretta.
Poiché n è usualmente di frequenza spaziale elevata rispetto ad F e di grandezza
relativamente piccola in confronto ad I, il rumore può essere trascurato.
Quindi il risultato che si vuole ottenere è 𝐼 ≈ 𝐹 −1 𝑂; è corretto che 𝐹 −1 abbia una bassa
frequenza spaziale, in quanto con questa assunzione il procedimento preserva il contrasto
locale che definisce le aree anatomiche d‘interesse.
Infine si trovano i parametri, relativi al campo utilizzato per la correzione dell‘intensità,
che minimizzano la cosiddetta divergenza di Kullback-Leibler4 tra l‘immagine corretta e
l‘immagine di riferimento:
arg min
p k log 2 p k q k
1
F
k
dove:
pk è la probabilità che nell‘immagine corretta 𝐹 −1 𝑂 il segnale d‘intensità si trovi
nello stato k (istogramma normalizzato di F-1O)
qk è la probabilità che nell‘immagine di riferimento M il segnale d‘intensità si
trovi nello stato k (istogramma normalizzato di M)
4
La divergenza di Kullback-Leibler, anche denominata entropia relativa, è un indice di similarità adoperato
per quantificare le differenze esistenti tra popolazioni: si usa in statistica e in teoria dell‘informazione per
confrontare due distribuzioni, una considerata ―vera‖, e una arbitraria. Essa non è considerabile una vera
distanza, in quanto non simmetrica: K(p,q) ≠ K(q,p).
44
Questo processo può essere utilizzato sia per le scansioni del cervello che per altre regioni
del corpo.
Metodo di standardizzazione tramite Landmark: dettagli
In questo paragrafo sono discussi i dettagli del metodo di standardizzazione tramite
landmark, [16, 20] al quale si è accennato nella parte di breve rassegna. Esso infatti è alla
base del lavoro sperimentale di cui tratterà il prossimo capitolo.
Questo metodo, come accennato, attua la trasformazione di un istogramma di intensità di
un immagine data, in un istogramma standard. Esso consta di due fasi: una di training ed una
di trasformazione.
Nella fase di training viene usato come input un set di immagini di una stessa regione del
corpo, acquisite con il medesimo protocollo. Da questo gruppo di immagini vengono stimati i
landmark di un istogramma ―standard‖. I landmark possono essere di varia natura: i punti di
massimo, particolari percentili, etc, e portano alla determinazione dei parametri della
trasformazione. Questo step viene eseguito una sola volta per un determinato protocollo e per
una specifica regione del corpo, su un numero di immagini (tipicamente, parecchie decine)
sufficientemente rappresentativo della popolazione delle immagini che saranno in seguito
trattate.
Nella fase di trasformazione ogni immagine acquisita con lo stesso protocollo e per la
stessa regione del corpo utilizzati nel primo step è trasformata in modo tale che i parametri del
suo istogramma combacino con quelli dell‘istogramma standard. I valori di grigio dei
landmark sono mappati su quelli standard, mentre i livelli intermedi sono mappati
linearmente. La trasformazione globale è quindi lineare a tratti. In questa maniera
l‘istogramma di ogni immagine è mappato su quello di riferimento.
La fase di trasformazione (non quella di training!) deve essere naturalmente ripetuta per
ogni nuova immagine acquisita.
La trasformazione applicata per la standardizzazione è evidentemente non lineare.
Tuttavia le relazioni tra le intensità dei tessuti vengono conservate e quindi il confronto delle
intensità può essere effettuato utilizzando le immagini standardizzate.
Seguono i dettagli del metodo, come formalizzati negli articoli citati.
45
Notazione
Si denoti con 𝒫 = 𝑃1 , 𝑃2 , … , 𝑃𝑛 il set di protocolli MRI e con 𝒟 = 𝐷1 , 𝐷2 , … , 𝐷𝑚
l‘insieme delle regioni del corpo considerate. Si indichi un‘immagine del volume con una
coppia 𝒱 = 𝑉, 𝑔 , dove V è un array tridimensionale dei voxel che ricoprono la regione del
corpo di un particolare paziente per il quale l‘immagine 𝒱 è acquisita, e 𝑔 è una funzione,
chiamata funzione di intensità, che assegna un valore di intensità intero per ogni voxel 𝑣 ∈ 𝑉.
Si assuma che 𝑔(𝑣) ≥ 0 per tutti i 𝑣 ∈ 𝑉 e 𝑔 𝑣 = 0 se e solo se non vi sono dati misurati per
il voxel 𝑣. Quindi con 𝒱𝑃𝐷 si indica l‘insieme di tutte le immagini rappresentanti una regione
del corpo 𝐷 ∈ 𝒟 e che sono state acquisite utilizzando un protocollo 𝑃 ∈ 𝒫.
L‘istogramma di ogni immagine 𝒱 sia rappresentato dalla coppia ℋ = (𝐺, ℎ), dove 𝐺 è il
range di tutti i possibili valori di intensità in 𝒱, e
è una funzione il cui dominio è 𝐺 e il cui
valore per ogni 𝑥 ∈ 𝐺 è il numero di voxel 𝑣 ∈ 𝑉 per cui 𝑔 𝑣 = 𝑥. Siano
𝑚1 = min 𝑔(𝑣) 𝑣 ∈ 𝑉 𝑒 𝑔 𝑣 > 0 e 𝑚2 = max 𝑔(𝑣) 𝑣 ∈ 𝑉 𝑒 𝑔 𝑣 > 0 rispettivamente
il valore minimo e massimo in 𝒱.
Procedimento
Nel caso di immagini di risonanza magnetica trattate dagli autori in [16, 20], si osservano
principalmente due tipi di istogrammi: unimodale e bimodale. Nello studio di questi
istogrammi la scelta dei landmark è un fattore molto importante, che incide notevolmente sul
risultato della standardizzazione.
Figura 21: esempi di istogrammi ottenuti da immagini cerebrali MRI e riportati in [16]; nel caso
dell’istogramma a sinistra (bimodale) il riferimento adottato è la seconda moda; nell’istogramma a
destra, praticamente unimodale, è scelto come landmark la spalla del primo picco (), dove per
spalla si intende il punto con pendenza -1. In entrambi i casi, il grosso picco a sinistra contiene
soprattutto voxel di sfondo.
46
In [20] gli autori usano come landmark, nel caso di istogrammi bimodali, la seconda
moda 𝜇 che corrisponde all‘oggetto in primo piano (toni di grigio più chiari), perché la moda
vera e propria dell‘istogramma (il punto di massimo assoluto) corrisponde alla sfondo Per gli
istogrammi unimodali, non potendo appunto considerare la moda, si sceglie di usare come
landmark la spalla della seconda moda, definita come l‘ascissa ove la tangente all‘istogramma
ha pendenza pari a -1.
In [16], d‘altra parte, si dimostra che utilizzare solo la moda come parametro per la
standardizzazione rende il metodo poco robusto. Infatti in alcuni istogrammi la moda
corrisponde all‘intensità relativa alla materia grigia, in altri casi all‘intensità dovuta alla
materia bianca, in altri ancora a intensità intermedie tra GM e WM. Quindi, nel momento in
cui si mappa la moda nella scala standard, non si conosce esattamente cosa si sta mappando.
Per ovviare a questo problema, nel medesimo articolo si considerano come landmark, anche
nel caso di istogrammi bimodali, i percentili. Nel prosieguo esponiamo la procedura estesa al
caso dei percentili.
In un istogramma i primi parametri che vengono determinati sono quelli corrispondenti al
minimo e al massimo valore di percentile, 𝑝𝑐1 e 𝑝𝑐2 rispettivamente (valori scelti
arbitrariamente, ad esempio 𝑝𝑐1 = 5° percentile e 𝑝𝑐2 = 95° percentile), che delimitano il
range di intensità di interesse, IOI. In questo modo vengono tagliate le code dell‘istogramma
che spesso causano diversi problemi: ad esempio la coda relativa alle alte intensità può
corrispondere ad artefatti che provocano variazioni nelle scansioni inter ed intra paziente.
I valori di intensità corrispondenti a 𝑝𝑐1 e 𝑝𝑐2 nell‘istogramma ℋ sono indicati con 𝑝1 e
𝑝2 .
Ecco come esempio alcuni possibili gruppi di landmark.
𝐿1 = 𝑝𝑐1 , 𝑝𝑐2, 𝜇 .
𝐿2 = 𝑝𝑐1 , 𝑝𝑐2, 𝜇10 , 𝜇20 , … , 𝜇90
(1)
in cui:
𝜇𝑝 , con 𝑝 ∈ 10,20, … ,90 , è il p-mo percentile in un istogramma di un‘immagine
considerata;
𝜇 rappresenta la seconda moda (considerando la prima inutile in quanto relativa ai
pixel di sfondo).
47
Fissati i landmark, ossia l‘insieme L opportuno, e un‘immagine 𝒱𝑗 , indichiamo con p1j e
p2j i grigi corrispondenti ai percentili pc1 e pc2 nell‘immagine 𝒱𝑗 , mentre 1j, 2j, … etc sono i
livelli di grigio corrispondenti ai percentili 10, 20, … etc.
Si ricorda, come già accennato, che la procedura consiste di due parti: una fase di training
e una di trasformazione, di seguito dettagliate.
Nella fase di training, i parametri, 𝑝1𝑗 , 𝑝2𝑗 , 𝜇1𝑗 , 𝜇2𝑗 , … , 𝜇𝑙𝑗 , ottenuti (una volta fissato
uno dei gruppi L di landmark dell‘eq.1) dagli istogrammi di ogni immagine 𝒱𝑗 , sono mappati
nella scala standard (arbitraria!) attraverso una trasformazione lineare delle intensità da
𝑝1𝑗 , 𝑝2𝑗 a 𝑠1 , 𝑠2 , dove 𝑠1 e 𝑠2 rappresentano rispettivamente il minimo ed il massimo
valore delle intensità che delimitano la IOI nella scala standard (Figura 22).
Figura 22. Rappresentazione grafica della creazione della scala standard
La formula che si utilizza per mappare 𝑥 ∈ [𝜇𝑘𝑗 , 𝜇𝑘+1 𝑗 ] in 𝑥 ′ sulla scala standard è la
seguente:
x k j
x k j
k 1 j k j
( k 1 j k j )
per convenzione si è posto 0 j p1 j , 0 j s1 ; l 1 j p2 j , l1 j s2
A questo punto, ciascun valore di grigio kj (grigio corrispondente al percentile k0
dell‘immagine j-ma) è stato proiettato nella scala standard, sul valore ’kj.
Terminata quest‘operazione su tutte le immagini di training, per ogni 𝑘, con 1 ≤ 𝑘 ≤ 𝑙, si
calcola la media 𝜇𝑘𝑠 di ciascun landmark 𝜇𝑘𝑗 ottenuto per ogni immagine 𝒱𝑗 .
48
E‘ stata a questo punto costruita una scala standard dei grigi corrispondenti ai landmark.
Essa è limitata dai valori s1 e s2, e comprende un insieme di valori di grigio ks (si veda ancora
la Figura 22).
Avviene ora la fase di trasformazione, applicata sia a tutte le immagini già adoperate per
il training, sia ad ogni nuova immagine.
Nello step di trasformazione, per ogni immagine 𝒱𝑖 si mappa la reale posizione dei
parametri 𝜇𝑘𝑖 nei corrispondenti valori 𝜇𝑘𝑠 attraverso una trasformazione lineare a tratti (in
pratica una interpolazione), come mostrato in Figura 23, ossia [𝑝1𝑖 , 𝜇1𝑖 ] in [𝑠1 , 𝜇1𝑠 ], [𝜇1𝑖 , 𝜇2𝑖 ]
in [𝜇1𝑠 , 𝜇2𝑠 ],…., [𝜇𝑙𝑖 , 𝑝2𝑖 ] in [𝜇𝑙𝑠 , 𝑠2 ].
Figura 23: rappresentazione grafica della trasformazione lineare a tratti
49
Inoltre si determina il valore standardizzato della minima e della massima intensità
dell‘immagine i-ma mappando m1i e m2i in s’1i e s’2i con la seguente espressione (estrapolante):
s1 1s
1s ( x 1i ) p , se m1i x 1i
1i
1i
vi ( x )
s
ls
( x ) 2
, se li x m2i
li
ls
p2i li
I valori s’1i e s’1i dipendono dall‘immagine 𝒱𝑖 considerata, a differenza dell‘intervallo
𝑠1 , 𝑠2 , che rappresenta il range in cui si ottiene la standardizzazione delle intensità.
Giunti a questo punto, le immagini sono state normalizzate su una scale standard
arbitraria, con il risultato che i toni di grigio corrispondenti a tessuti simili in immagini
diverse, sono simili, e quindi le immagini possono essere direttamente confrontate.
Limiti del metodo
Il metodo di standardizzazione esposto non è esente da difetti. Siccome, infatti, le scale di
grigio iniziali non sono legate da relazioni ben definite e note, può succedere ad esempio che,
in una delle immagini, voxel appartenenti a tessuti di tipo diverso siano rappresentati da valori
uguali di grigio, mentre in un‘altra immagine ciò non si verifichi. A questo punto,
evidentemente i landmark nelle due immagini rischiano di avere significato fisico diverso e
non coerente, e quindi non possano essere confrontabili e dunque utilizzabili nel processo di
training: si rischierebbe, infatti, di mescolare in talune immagini tipi di materia diversi.
Poiché questa situazione non può essere conosciuta a priori, il sistema rischia di fallire
nel compito di creare una scala comune a tutte le immagini veramente utile per i confronti.
Una soluzione, che lascia distinti in partenza i vari tipi di materia (WM, GM, CSF) e
quindi non rischia di introdurre artefatti di questo tipo, è segmentare le immagini nelle tre
classi di materia prima di procedere alla standardizzazione, che verrà quindi compiuta
all‘interno di ciascuna classe e non sull‘intera immagine. In questo modo, la probabilità di
introdurre artefatti è fortemente diminuita.
Questa è la strada seguita nel Capitolo 4. Prima di vederne i dettagli, occorre però
introdurre e descrivere alcune operazioni tipiche dell‘image processing.
50
Operazioni rilevanti per la procedura completa di standardizzazione
Come sarà esposto in dettaglio nel Capitolo 4, dedicato alla procedura software impiegata in
questa Tesi per la standardizzazione degli istogrammi dei grigi, sono necessarie, per la
realizzazione di un sistema basato sulla pre-segmentazione nelle tre materie principali
costituenti il cervello (bianca, grigia e liquido cerebrospinale), due operazioni tipiche di
processamento delle immagini: la coregistrazione, e la segmentazione. Per questa ragione,
dette operazioni sono trattate brevemente nei prossimi paragrafi.
Coregistrazione
Col termine coregistrazione si intende un insieme di metodi automatici o semiautomatici
che correlano spazialmente la posizione reciproca di due (o più) immagini del medesimo
soggetto, acquisite o in tempi differenti o con tecniche di imaging diagnostico diverse. Le due
immagini sono dette immagine d‘origine (o mobile) e immagine di riferimento (o fissa, o
target); la procedura di coregistrazione permette di individuare la trasformazione spaziale che,
applicata pixel per pixel all‘immagine d‘origine, porta quest‘ultima ad assomigliare
all‘immagine di riferimento (Figura 24).
La coregistrazione può anche essere realizzata solo in base a una parte di ciascuna
immagine, come quando si desidera raccordare immagini telerilevate di zone limitrofe della
Terra, che siano parzialmente sovrapposte (Figura 25) oppure quando si voglia sfruttare la
coregistrazione per individuare, in un‘immagine più grande, un oggetto rappresentato in una
più piccola (e.g. un dettaglio anatomico).
La coregistrazione può essere effettuata attraverso una trasformazione rigida, se il
soggetto dell‘immagine d‘origine deve essere semplicemente ruotato e/o traslato in modo da
ottenere una buona corrispondenza;[23] se una trasformazione comprende anche operazioni
diverse, allora si dice non rigida.
Un tipo importante di trasformazione non rigida, usata nella coregistrazione di immagini,
è la trasformazione affine, che considera, oltre ai parametri utilizzati nella rigida, anche fattori
di scala e shear (stiramento) (Figura 26, dove le trasformazioni componenti una mappatura
affine sono rappresentate nello spazio 2D). Le trasformazioni affini sono utili per correggere
51
parzialmente le differenze di calibrazione, ottenute acquisendo immagini con dispositivi
differenti.
Figura 24: Schema di coregistrazione.[23] L’immagine d’origine (immagine mobile, indicata come
source) è trasformata avendo per modello quella fissa (target). Dapprima è ruotata, poi è applicata
una scalatura globale (isotropa nelle due dimensioni) e infine, grazie a una trasformazione non
rigida, locale, non lineare, diventa il più possibile simile all’immagine fissa
Per la registrazione di neuroimmagini è spesso sufficiente una trasformazione rigida o al
più affine, perché la forma, la dimensione, e la posizione del cervello variano poco da una
scansione ad un altra.
La coregistrazione non è naturalmente fine a stessa, ma è un valore aggiunto
all‘immagine: essa permette, di visualizzare e analizzare immagini, sia funzionali che
strutturali, anche di diversa risoluzione, in uno stesso sistema di riferimento; inoltre è utile per
monitorare e quantificare l‘evoluzione di malattie.
In alcuni settori applicativi è diventato uno strumento fondamentale: analisi affidabili di
immagini MRI del cervello richiedono la coregistrazione per correggere piccole variazioni
dovute ai movimenti che il paziente ha effettuato nel momento dell‘esame; le tecniche di
morfometria basata sui voxel (VBM, Voxel-Based Morphometry) utilizzano immagini
coregistrate per avere immagini del cervello (usualmente di centinaia di pazienti) in un
sistema di coordinate comune per tutti.
52
Figura 25: Coregistrazione di immagini telerilevate; in questo caso l'immagine mobile (in alto a
destra) condivide solo parte del soggetto con quella fissa.
La corrispondenza tra le immagini, ottenuta attraverso rotazioni, traslazioni o stiramenti,
può essere usata per cambiare l‘aspetto di un immagine, in modo tale che questa risulti molto
simile ad un‘altra utilizzata come riferimento, ottenendo così la possibilità di effettuare
direttamente confronto e analisi.
Nella coregistrazione l‘immagine di riferimento rimane stazionaria mentre l‘altra,
l‘mmagine d‘origine, viene trasformata spazialmente finché non si sovrappone a quella di
riferimento. Per ottenere la trasformazione è necessario mappare le posizioni di ogni voxel
dell‘immagine di riferimento nelle corrispondenti posizioni dell‘immagine d‘origine; in
questo modo l‘immagine d‘origine è rimodellata nelle nuove posizioni.[24]
Per effettuare la mappatura si richiede la stima di un set di parametri di trasformazione.
Ad esempio in una trasformazione rigida tridimensionale si hanno sei parametri: tre relativi
alle traslazioni e tre alle rotazioni, mentre in una trasformazione affine i parametri utilizzati
53
sono dodici: tre relativi alle traslazioni, tre alle rotazioni, tre alle scalature (indipendenti sui
tre assi) e tre alla deformazione (shear).
Figura 26: rappresentazione grafica delle possibili componenti di una trasformazione affine (in 2D)
Trasformazioni affini
Le trasformazioni affini sono trasformazioni lineari, che preservano:
la collinearità: punti appartenenti a una linea retta giacciono ancora su una linea
retta dopo la trasformazione
il rapporto tra le distanze: il punto medio di un segmento rimane, dopo la
trasformazione, il punto medio dello stesso segmento trasformato.
Le trasformazioni geometriche ad essa associate sono rotazione, traslazione, scalatura e
deformazione (shear). Le trasformazioni affini includono quelle rigide in quanto quest‘ultime
consistono nelle sole operazioni di rotazione e traslazione.
In un‘immagine 3D, per ogni punto (𝑥1 , 𝑥2 , 𝑥3 ) una mappatura affine può essere definita
nelle coordinate di un altro spazio (𝑦1 , 𝑦2 , 𝑦3 ) attraverso le seguente espressioni[25]:
𝑦1 = 𝑚11 𝑥1 + 𝑚12 𝑥2 + 𝑚13 𝑥3 + 𝑚14
𝑦2 = 𝑚21 𝑥1 + 𝑚22 𝑥2 + 𝑚23 𝑥3 + 𝑚24
𝑦3 = 𝑚31 𝑥1 + 𝑚32 𝑥2 + 𝑚33 𝑥3 + 𝑚34
che possono essere scritte anche sotto forma matriciale:
y1 m11 m12
y m
2 21 m22
y 3 m31 m32
0
1 0
m13
m23
m33
0
m14 x1
m24 x 2
m34 x3
1 1
Vediamo in dettaglio i possibili parametri di una trasformazione affine.
54
Traslazioni
Se un punto x deve essere traslato di un‘unità q, allora la trasformazione che si deve
applicare è:
yi = xi + qi
(i = 1, 2, 3)
o, in termini matriciali:
y1 1
y 0
2
y 3 0
1 0
0
1
0
0
0 q1 x1
0 q 2 x 2
1 q 3 x3
0 0 1
Rotazioni
Nel caso 2D la rotazione avviene intorno a un singolo angolo.
Si consideri un punto di coordinate (𝑥1 , 𝑥2 ) in uno spazio bidimensionale. Una rotazione
di angolo 𝜃 può essere generata dalla seguente trasformazione:
y1 cos( ) x1 sin( ) x2
y 2 sin( ) x1 cos( ) x2
Nello spazio 3D vi sono tre piani ortogonali in cui l‘oggetto può ruotare e la
trasformazione avviene rispetto a un asse fisso non necessariamente coincidente con uno degli
assi. In questo caso gli angoli di rotazione rispetto agli assi, che producono la rotazione 3D
desiderata, si chiamano angoli di Pitch, di Roll e di Yaw (Figura 27).
55
Figura 27: Angoli di yaw (imbardata), pitch (beccheggio) e roll (rollio)
Una rotazione di angolo 𝑞1 rispetto all‘asse x, è chiamata pitch e può essere espressa nel
seguente modo:
0
0
y1 1
y 0 cos(q ) sin(q )
1
1
2
y 3 0 sin(q1 ) cos(q1 )
0
0
1 0
0 x1
0 x 2
0 x3
1 1
Analogamente, le rotazioni intorno all‘asse y e all‘asse z, denominate rispettivamente roll
e yaw, si possono ottenere utilizzando le seguenti matrici:
cos(q 2 )
0
sin(q 2 )
0
0 sin(q 2 )
1
0
0 cos(q 2 )
0
0
0
0
0
1
cos(q3 ) sin(q3 )
sin(q ) cos(q )
3
3
0
0
0
0
0
0
1
0
0
0
0
1
La matrice di rotazione complessiva si ottiene moltiplicando queste matrici nell‘ordine
appropriato (ricordando che le rotazioni nello spazio tridimensionale non commutano).
56
Ingrandimenti
Gli ingrandimenti sono necessari per cambiare la grandezza delle immagini (anche in
maniera anisotropa, ossia diversamente nelle tre direzioni dello spazio) e per lavorare su
immagini i cui voxel hanno grandezze diverse o non sono isotropici.
Questo cambiamento di scala lungo gli assi ortogonali si rappresenta nel modo seguente:
y1 q 0
y 0 q
2
2
y3 0 0
1 0 0
0
0
q3
0
0 x1
0 x 2
0 x 3
1 1
Shear
Lo shear è una particolare trasformazione di deformazione (detta anche di taglio) in cui i
punti di una particolare linea retta l rimangono fissi mentre altri punti appartenenti a rette
parallele ad l vengono traslati, in maniera proporzionale alla distanza tra le due rette, e nella
direzione delle rette medesime. In Figura 28 si può osservare un esempio di trasformazione di
taglio.
Figura 28: esempio di trasformazione di deformazione
Una trasformazione di deformazione è rappresentata dalla seguente matrice, in cui
𝑞1 , 𝑞2 , 𝑞3 sono i parametri di taglio:
1 q1
0 1
0 0
0 0
q2
q3
1
0
0
0
0
1
57
Interpolatori
Gli spazi in cui sono definite le immagini digitali sono, naturalmente, discreti.
Conseguentemente, i centri dei voxel sono vincolati a giacere sui nodi di una griglia, più o
meno fitta a seconda della risoluzione. Quando un punto viene mappato dallo spazio di
un‘immagine a quello di un‘altra attraverso una trasformazione (ad esempio nel corso della
coregistrazione), esso generalmente non si posiziona con precisione sulla griglia
dell‘immagine di arrivo.[24] E‘ quindi necessario utilizzare un interpolatore per determinare i
valori di grigio sulla griglia in base a quelli (eventualmente) fuori griglia provenienti dalla
trasformazione dell‘immagine di partenza.
La scelta degli interpolatori comporta variazioni nel costo computazionale dell‘algoritmo,
quindi risulta importante scegliere un interpolatore capace di bilanciare la qualità con la
velocità di esecuzione.
Un primo approccio è rappresentato dal metodo Nearest Neighbor Interpolator (Figura
30), che semplicemente assegna al voxel interpolato (quello giacente sulla griglia) l‘intensità
del voxel trasformato ad esso più vicino, assumendo a priori che l‘intensità di grigio si
conservi per piccoli intorni del voxel in esame; sebbene il metodo abbia il vantaggio di
preservare i valori dei grigi iniziali, l‘immagine finale così ricampionata non è generalmente
smooth in quanto, in caso soprattutto di ingrandimenti e forti shear, tende ad assumere un
aspetto ‗a blocchi‘.
Un altro metodo (in 3D) è basato sull‘interpolazione trilineare; essa presenta un tempo di
esecuzione più lungo rispetto al precedente, ma l‘immagine risultante è smooth, talvolta anche
in maniera eccessiva, in quanto può verificarsi la perdita dei dettagli più fini (di alta
frequenza).[25]
In
Figura
29
Si
illustra
l’interpolazione
bilineare,
versione
bidimensionale
dell‘interpolazione trilineare. Si assume che ci sia una griglia regolare di pixel. Volendo
calcolare il valore di grigio T, si usa dapprima l‘interpolazione lineare per calcolare il valore
di Ta e Tb, e poi si determina il valore T interpolando nuovamente Ta e Tb. Ogni volta è
effettuata una media pesata dei valori dei pixel, in cui i pesi sono legati alle distanze tra i
pixel. L‘estensione al caso 3D è immediata.
58
Figura 29: illustrazione dell’interpolazione bilineare, equivalente alla trilineare per il caso 2D. I
punti indicati con T1-T4 rappresentano la griglia originale dei pixel (Ti è il valore di grigio nel punto
i-mo). Il valore T è quello da determinare; i valori Ta e Tb sono risultati intermedi usati per il calcolo.
http://didattica.arces.unibo.it/file.php/59/Elaborazione_dellImmagine_L-S/Materiale_Didattico/Interpolazione_Bilineare.pdf
di Luigi Di Stefano.
Figura 30: Metodi di interpolazione; l'immagine originale (a sinistra) è stata ingrandita 5 volte:
conseguentemente la risoluzione della griglia di pixel è aumentata, ed è stato necessario ricorrere a
un interpolatore;l’immagine al centro è stata calcolata tramite Nearest Neighbor (NN), quella a
destra con interpolazione bilineare. E’ evidente la scarsa qualità dell’interpolatore NN, il quale però,
a suo vantaggio, non “inventa” nulla, dando in output solo i valori di grigio presenti in input.
Metodi di registrazione
Prima di individuare le trasformazioni necessarie per la coregistrazione, è necessario
misurare la similarità delle immagini su cui si vuole applicare la coregistrazione; in base alla
59
similarità, si varieranno i coefficienti delle trasformazioni iterativamente, in modo da ottenere
il massimo di somiglianza tra l‘immagine mobile trasformata, e l‘immagine fissa.
La misura della similarità può essere effettuata con un approccio geometrico (label based)
o con un approccio basato sui valori delle intensità (intensity based).[26]
Nel metodo geometrico (spesso denominato point based) si identifica a priori un insieme
di elementi (punti, linee o superfici) corrispondenti tra le immagini da registrare; gli elementi
vengono etichettati e si calcola la similarità tra le immagini in base alla distanza euclidea tra
ciascun elemento di riferimento in un‘immagine e il suo corrispondente nell‘altra. Si cerca
successivamente la trasformazione che permette di ottenere la migliore sovrapposizione delle
immagini, ottimale quando gli elementi etichettati nell‘immagine mobile si sovrappongono il
più possibile (compatibilmente con il tipo di coregistrazione richiesto: rigida, affine etc) a
quelli dell‘immagine fissa.
Poiché tali punti vengono considerati precisi e la loro posizione reputata esatta per
definizione, essi vengono denominati punti fiduciali (fiducial points), o più spesso markers.
Per essere effettivamente utilizzabili, i marker devono solitamente risiedere in zone
facilmente individuabili, le cosiddette fiducial features.
I riferimenti possono essere di natura anatomica, come il punto di intersezione tra due
strutture lineari (esempio: biforcazione di un vaso); questi vengono identificati visivamente,
comportando un dispendio di tempo non indifferente e una valutazione soggettiva, oppure in
maniera automatica da un sistema di image processing opportuno.
I riferimenti possono anche essere individuati piazzando marker estranei all‘anatomia da
analizzare (reperi); essi devono risultare facilmente individuabili dagli algoritmi di
registrazione.
Questi elementi di riferimento saranno, all‘inizio, inevitabilmente disallineati tra le due
immagini; la misura dell‘errore di allineamento in ciascuna coppia di marker è usualmente
indicata con il termine fiducial localization error (FLE), per cui la coppia i-ma sarà
caratterizzata dal valore FLEi (Figura 31).
La procedura di coregistrazione prevede la minimizzazione del Fiducial Registration
Error (FRE), tipicamente una misura quadratica del tipo:
1 N
FRE i2 Rx i t yi
N i 1
2
2
con
i
1
FLEi2
dove si è supposto che la trasformazione desiderata sia rigida, ossia una rototraslazione data
dalla coppia (R, t), e che la posizione degli N marker sull‘immagine mobile sia xi, mentre
quella sull‘immagine fissa sia yi,
60
Figura 31: schematizzazione della registrazione point-based illustrante il Fiducial Localization Error;
i punti neri rappresentano le posizioni in cui ciascun punto grigio dovrebbe spostarsi per ottenere la
coregistrazione.
Questo metodo consente di raggiungere un buon livello di accuratezza; esso tuttavia
necessita usualmente dell‘intervento umano per l‘individuazione dei marker, che
costituiscono la base di partenza per la corretta registrazione: l‘individuazione di marker in
maniera automatica è infatti spesso poco affidabile.
Per questo motivo sono stati cercati delle tecniche alternative, dette intensity based, che
sono la classe di metodi maggiormente diffusi allo stato attuale tra tutti gli approcci alla
registrazione di immagini. Essi lavorano direttamente sui voxel e determinano la
trasformazione geometrica tra due immagini ottimizzando iterativamente un‘opportuna
funzionale di similarità, calcolata sulla base dei valori di grigio di tutti voxel dell‘immagine.
La funzione di similarità fornisce una misura quantitativa del grado di allineamento di due
immagini, e quindi della bontà della coregistrazione.
Un modo per definire la misura di similarità è basato sul calcolo della somma dei quadrati
delle differenze dei livelli di grigio, voxel per voxel, grandezza denominata Sum of Square
Differences (SSD); la SSD avrà valore pari a zero in caso di corretto allineamento, e assumerà
valori crescenti al crescere del disallineamento tra le immagini. E‘ una misura adatta a quei
casi in cui le due immagini da registrare sono identiche, fuorché per un lieve disallineamento:
61
N
SSD( A, B) ( Ai Bi ) 2
i 1
Ai e Bi rappresentano l‘i-mo pixel delle immagini A e B rispettivamente.
Se il valore risultante è elevato allora vi è una scarsa corrispondenza tre le immagini.
Alcune applicazioni reali risultano effettivamente vicine al caso ideale; ad esempio nello
studio della degenerazione di patologie mediante scansioni MR eseguite in tempi successivi,
una relativamente piccola porzione dei valori di grigio subirà dei cambiamenti significativi.
La debolezza di questo approccio si presenta qualora l‘entità dei cambiamenti diventa troppo
ingente e, nonostante questi siano limitati a ristrette regioni di interesse, la misura della SSD
ne risente in maniera sostanziale.
La Figura 32 mostra un caso reale, ottenuto tramite coregistrazione non rigida su
neuroimmagini.
Figura 32: Esempio di coregistrazione non rigida su volumi T1 in MRI. Il Subject 1 è l’immagine
fissa, il Subject 2 la mobile; la terza riga mostra l’effetto di una coregistrazione non rigida del
Subject 2 sul Subject 1. Le principali strutture anatomiche sono state messe in corrispondenza.
62
SPM per la coregistrazione delle immagini
Il sistema realizzato per questo lavoro di Tesi sfrutta, per la coregistrazione e la
segmentazione delle immagini, alcuni strumenti già esistenti e disponibili nel pacchetto
SPM,[27] a sua volta basato su Matlab.
La scelta di SPM non è stata causale, e ha comportato il test di diversi software per la
coregistrazione e/o per la segmentazione delle immagini del cervello nelle tre materie
fondamentali (WM, GM, CSF). In particolare, tra questi, è stata esaminata la libreria software
denominata FSL (http://www.fmrib.ox.ac.uk/fsl/).
Nei test si è dovuta prestare attenzione a svariati fattori:
qualità di processing
compatibilità con le immagini in nostro possesso, da non sottovalutare, in quanto i
molti formati di immagini diagnostiche esistenti (DICOM, Analyze, Nifti…)
conducono spesso a risultati imprevedibili e difficili da comprendere (ad esempio,
nel formato del file può essere memorizzata una trasformazione spaziale alla quale
è soggetta l‘immagine, ma non tutti i software sono in grado di vederla e
applicarla)
semplicità d‘uso e tempi di calcolo ragionevoli
E‘ stato preferito SPM, avendo esso dimostrato una buona versatilità, anche a causa
dell‘interfaccia semplice e completa, e avendo buoni risultati e tempi di calcolo gestibili
(tipicamente alcuni minuti per immagine, per ciascuna operazione).
SPM (Statistical Parametric Mapping) è un package software progettato per l‘analisi di
sequenze di dati di imaging cerebrale, in particolare MRI, ma anche fMRI, PET, SPECT. In
futuro dovrebbe anche incorporare l‘analisi di dati EEG e MEG. La versione corrente di SPM
è la 8, rilasciata in Aprile 2009.
SPM effettua la coregistrazione delle immagini tramite metodi statistici, partendo da
immagini fisse standard (‗template’) ottenute mediando un gran numero di immagini reali
precedentemente coregistrate tra loro. In alcuni casi le immagini template sono fortemente
smussate, allo scopo di velocizzare la convergenza degli algoritmi di coregistrazione, e ridurre
63
il rischio che il sistema di ottimizzazione possa cadere in minimi relativi delle funzioni
distanza, a causa dell‘eccessivo numero di dettagli dell‘immagine template.
Segmentazione
La segmentazione è il processo di partizionamento di un immagine in regione omogenee,
sulla base di determinati criteri di appartenenza di un pixel a una regione. Il suo obiettivo è
focalizzato sull‘individuazione e l‘esaltazione di oggetti ad alta priorità rispetto allo sfondo o
rispetto ad altri oggetti circostanti.
I tessuti di un cervello sano possono generalmente essere classificati in tre classi
principali: materia grigia (GM), materia bianca (WM) e liquido cerebrospinale (CSF).
Partendo, ad esempio, da immagini T1, questa classificazione potrebbe essere eseguita
manualmente, selezionando nell‘immagine adeguati range di intensità che comprendono la
maggior parte dei voxel di un particolare tipo di tessuto. Tuttavia la selezione manuale delle
soglie è altamente soggettivo. Per ovviare a questo problema molti gruppi di ricerca hanno
utilizzato algoritmi di clustering (classificazione non supervisionata). Questo metodo può
essere applicato sia ad immagini acquisite con uno stesso protocollo, sia ad immagini, tra loro
coregistrate, ed ottenute con sequenze diverse.
SPM per la segmentazione delle immagini
Il programma di segmentazione utilizzato in questa Tesi è quello inserito in SPM [27].
Esso si basa sull‘approccio al clustering tramite ‖mixture model‖,[28] esteso per includere
mappe di probabilità a priori e anche per correggere la non uniformità delle intensità nelle
immagini; la correzione del campo di bias, com‘è stato illustrato nel capitolo precedente, è
necessaria in quanto la distinzione dei tessuti è basata sull‘intensità dei voxel e quindi
variazioni d‘intensità provocano errori di classificazione.
Nel modello utilizzato si assume che le immagini MR contengano un determinato numero
di tessuti differenti (cluster). Le intensità dei voxel appartenenti ad ognuno di questi cluster si
attengono a una distribuzione normale, che può essere descritta dalla media, dalla varianza e
dal numero di voxel appartenenti alla distribuzione.
64
Algoritmo di classificazione dei voxel
Per semplificare la spiegazione dell‘algoritmo utilizzato per la segmentazione dei tessuti
consideriamo la sua applicazione su una singola immagine bidimensionale, ma il discorso è
ripetibile senza variazioni rilevanti anche nel caso 3D.[29]
Assumiamo inoltre che:
1. ognuno degli I x J voxel dell‘immagine F sia tratto da una di un numero noto (k)
di classi distinte di tessuto (cluster); nel caso di interesse k = 3 per GM, WM,
CSF;
2. la distribuzione delle intensità dei voxel in ogni classe sia normale e inizialmente
sconosciuta
3. i parametri che descrivono la distribuzione delle intensità nel cluster k siano il
numero di voxel nel cluster stesso (ℎ𝑘 ), la media (𝑣𝑘 ) e la varianza (𝑐𝑘 ).
Le probabilità a priori che i voxel appartengano rispettivamente alla materia grigia, alla
materia bianca e al liquido cerebrospinale sono note, in quanto le immagini si suppongono
coregistrate inizialmente con un atlante già segmentato, e quindi sono mappate in un ben
determinato spazio stereotassico5. Quest‘informazione è disponibile sotto forma di immagini
contenenti mappe di probabilità, ottenute dalle scansioni di 152 soggetti sani e giovani e
fornite dall‘istituto neurologico di Montreal, partecipante al progetto ICBM (International
Consortium for Brain Mapping).
Le mappe di probabilità (in numero di tre, una per ciascuna classe principale di tessuto)
contengono voxel i cui valori sono compresi tra zero ed uno, e rappresentano la probabilità a
priori che un voxel appartenga a GM, WM o CSF dopo che le immagini sono state
normalizzate nello stesso spazio.
L‘ultima assunzione che si effettua è che l‘intensità e il rumore associati ad ogni voxel
sono modulati moltiplicandoli per un campo scalare di smussamento non noto (il campo di
bias).
5
lo spazio stereotassico è utilizzato per descrivere la posizione delle strutture cerebrali indipendentemente dalla
differenza di forma e di dimensione tra i cervelli presi in esame. Il sistema stereotassico viene definito a partire
dalle commessure anteriore e posteriore unite da una linea retta. L‘origine del sistema è posto nella commessura
anteriore dalla quale si misurano le distanze.
65
Ci sono molti parametri che devono essere determinati dall‘algoritmo utilizzato per la
classificazione dei voxel, e inoltre la stima di alcuni di essi richiede l‘acquisizione precedente
di altri. La determinazione dei parametri che descrivono un cluster (ℎ𝑘 , 𝑣𝑘 , 𝑐𝑘 ) dipende dalla
conoscenza di quali voxel appartengono a quel determinato cluster,e inoltre dalla forma della
funzione che modula l‘intensità (campo di bias). La stima di quali voxel debbano essere
assegnati ad ogni cluster presuppone, d‘altra parte, che i parametri dei cluster siano già stati
definiti, cosi come il campo di modulazione. A sua volta la determinazione del campo di
modulazione necessita la conoscenza dei parametri dei cluster e le probabilità di
appartenenza. Sembra dunque che il problema sia insolubile, almeno in maniera diretta.
È necessario, quindi, ricorrere a un algoritmo iterativo, che assegna dei valori iniziali per i
vari parametri. Il valore iniziale per il campo di bias di solito è uniformemente uno, mentre i
valori per le probabilità di appartenenza alle classi GM, WM e CSF sono basati sulle mappe
di probabilità note a priori di cui si è già parlato. Dal momento che, perlomeno in
quest‘implementazione del software, non esistono mappe di probabilità per il fondo e per le
classi di tessuto che non appartengono al cervello, queste sono determinate sottraendo le
mappe di probabilità note a priori della GM, WM e CSF dalla mappa complessiva, e
successivamente dividendo equamente il risultato tra i cluster rimanenti.
Figura 33: diagramma di flusso per la segmentazione dei tessuti
Ogni iterazione dell‘algoritmo comporta:
66
la valutazione dei parametri dei cluster relativi alle immagini corrette
dall‘inomogeneità delle intensità;
l‘assegnazione delle probabilità di appartenenza basata sui parametri delle classi;
il controllo della convergenza;
la determinazione e l‘applicazione della funzione di modulazione.
Ad ogni nuova iterazione i valori che descrivono la distribuzione cambiano in modo da
ottenere un fit migliore e le probabilità di appartenenza (P) variano leggermente per adattarsi
alle nuove distribuzioni. Il processo continua finché non si raggiunge la convergenza
desiderata.
I parametri che descrivono i cluster, se sono coerenti con le immagini di probabilità note a
priori e fornite al sistema, convergono molto più velocemente degli altri. Questo è dovuto,
parzialmente, alla migliore stima iniziale. I valori finali relativi alle probabilità di
appartenenza sono compresi tra zero ed uno, tuttavia la maggior parte di essi presentano un
valore più vicino ad uno dei due estremi.
In sostanza l‘algoritmo è basato sul processo di Expectation Maximization6 (EM), in cui
la fase di expectation è il calcolo delle probabilità di appartenenza ai vari cluster, e la fase di
maximization è il calcolo dei parametri dei cluster e della correzione del campo di bias.
6
Lo scopo dell‘algoritmo EM, procedura iterativa che alterna due step: Expectation e Maximization, è
quello di aumentare, e possibilmente massimizzare, l‘attendibilità dei parametri di un modello probabilistico
rispetto a un insieme di dati statistici.
67
CAPITOLO 4: Un software per la standardizzazione delle scale di grigi
Il capitolo descrive lo schema generale del software per la standardizzazione delle
intensità, proposto in questo lavoro di Tesi. Vengono poi riportati alcuni risultati preliminari
ottenuti su un piccolo gruppo di immagini.
Si mostra in Figura 34 lo schema generale dell‘algoritmo implementato.
Figura 34: Schema delle fasi principali della standardizzazione delle intensità dei grigi.
L‘algoritmo è stato sviluppato su immagini di risonanza magnetica reperibili dal database
della LONI (Laboratory of Neuro Imaging, http://www.loni.ucla.edu/).
I primi tre blocchi del diagramma di flusso sono stati sviluppati con l‘ausilio del software
SPM (Statistical Parametring Mapping) nella versione 8.
SPM richiede che queste immagini, essendo di pazienti differenti e acquisite in tempi e
con dispositivi diversi, siano coregistrate spazialmente su un‘immagine di riferimento
(template) prima che venga effettuata la procedura di segmentazione tramite il medesimo
template.
Nella seconda fase dell‘algoritmo viene eseguita la correzione del campo di bias, seguita
dalla segmentazione. Prima della segmentazione è necessario effettuare la correzione del
68
campo di bias in quanto la disuniformità delle intensità, che si manifesta con il cambiamento
dell‘intensità di uno stesso tessuto all‘interno di una stessa immagine, renderebbe poco
accurata la fase di segmentazione.
Col processo di segmentazione si vuole suddividere il cervello nelle sue principali
componenti: materia grigia (GM), materia bianca(WM) e liquido cerebrospinale(CSF), in
modo che la standardizzazione dei livelli di grigio possa avvenire senza mescolamento delle
tre materie.
Nell‘ultima fase, che rappresenta il lavoro più pregnante di questa tesi, si standardizzano
le intensità di ogni immagine, separatamente nelle tre materie.
Descrizione del software
Segue la descrizione dettagliata del software realizzato.
Coregistrazione
Per la fase di coregistrazione, come anticipato, si utilizza SPM8 (Figura 35).
Figura 35: Interfaccia grafica del software SPM8 utilizzato per le fasi di coregistrazione e di
segmentazione.
69
Fornendo le immagini da analizzare e selezionando l‘immagine di riferimento (template)
su cui le nostre immagini devono essere coregistrate, si ottiene la sovrapposizione di queste
nello spazio del template.
La scelta del template è arbitraria; quello utilizzato in questo lavoro presenta le seguenti
caratteristiche principali:
dimensione dell‘immagine: 181x217x181;
l‘origine delle coordinate nel punto x = 46, y = 64, z = 37;
dimensione dei voxel: 1x1x1 (mm3)
Dopo la coregistrazione tutte le scansioni, appartenenti al set di immagini che si vogliono
analizzare, avranno le stesse dimensioni e la stessa origine. In Figura 36 si mostra la
variazione delle caratteristiche di una stessa immagine dopo averla coregistrata con
un‘immagine di riferimento.
Figura 36: si riporta a sinistra l’immagine con le sue caratteristiche originali, al centro i valori del
template e a destra la scansione dopo la coregistrazione.
70
Segmentazione
Anche la fase di correzione del campo di bias e di segmentazione sono effettuate
attraverso l‘uso di SPM8. Questo step viene eseguito sulle immagini di output che
provengono dal processo di coregistrazione. Ad ogni immagine in input ne corrisponderanno
quattro di output:
una rappresentante l‘immagine del cervello intero corretta dal campo di bias;
tre, raffiguranti il risultato della segmentazione, ossia corrispondenti alle mappe di
probabilità relative alla materia grigia, alla materia bianca e al liquido cerebrospinale.
Figura 37: Mappe di probabilità GM, in alto a destra, WM, in alto a sinistra, e CSF in basso.
A questo punto si passa alla fase di standardizzazione (figura seguente, che dettaglia la
procedura).
71
buildAndSaveAllFiles
(1)
Preparazione delle immagini; per ciascuna immagine:
carica l'immagine originale
carica le mappa di probabilità della materia bianca, grigia e
liquido;
crea 3 maschere (WM/GM/CSF) a partire dalle mappe di probabilità
estrae 3 immagini dall'originale in base alle maschere, allo scopo
di calcolare poi gli istogrammi ed effettuare la standardizzazione
separatamente sulle tre materie.
Per WM/GM/CSF:
(2)
Calcola statistiche (NormalizedMeanIntensity)
main_train (fase di training)
main_standardize (fase di standardizzazione)
Calcola statistiche immagini standardizzate
(NormalizedMeanIntensity)
composeWGF
(3)
Unisci le immagini WM/GM/CSF per ottenere
le immagini finali standardizzate
Figura 38: Diagramma di flusso dettagliato della fase di standardizzazione degli istogrammi e di
ricostruzione dell’’immagine completa.
Siccome l‘output della fase di segmentazione è costituto da mappe di probabilità, e non da
distribuzioni spaziali di grigi (ossia da immagini vere e proprie), prima di poter applicare il
metodo di standardizzazione è necessario effettuare delle operazioni sulle mappe, tese a
costruire delle immagini contenenti solo i voxel di materia bianca, grigia e liquido
rispettivamente.
Queste operazioni sono necessarie in quanto il metodo di standardizzazione si applica
naturalmente a vere e proprie immagini.
Passaggio dalle mappe di probabilità alle immagini WM/GM/CSF
Per ottenere le immagini della materia grigia, bianca e del liquido cerebrospinale, bisogna
prima trasformare le mappe di probabilità nelle relative maschere, da usare per estrarre le
immagini WM/GM/CSF dall‘immagine originale, si veda il blocco (1) nella Figura 38.
72
La differenza tra mappe di probabilità e maschere sta nei valori delle intensità: mentre per
le mappe di probabilità il range di valori è compreso tra 0 e 1 (Figura 37), nelle maschere i
valori sono esclusivamente 0 o 1 (Figura 39 riga inferiore).
Figura 39: nella prima riga si mostrano le immagini della materia bianca, del liquido cerebrospinale,
della materia grigia e l’originale; nella seconda riga si riportano le rispettive maschere.
Andando ad analizzare le mappe di probabilità, si è notata la presenza di voxel a volume
parziale:
voxel a ridosso del margine del cervello
voxel che possono essere in comune tra due o tre tessuti
Per poter attribuire ogni voxel ad una sola classe di tessuto e quindi ottenere le maschere
relative alle tre materie si applicano delle soglie alle mappe di probabilità.
Per i voxel che si trovano sul bordo del cervello: si attribuisce valore 1 se presenta un
valore di intensità maggiore di 0,5, altrimenti zero; in quest‘ultimo caso il voxel si trova
presumibilmente nel vuoto, o potrebbe rappresentare osso o grasso (rimossi durante la
segmentazione).
Per i voxel misti, si assegna il voxel alla maschera corrispondente alla mappa di
probabilità che presenta per il voxel stesso la probabilità più alta di appartenenza. Ossia se si
ha un voxel con un valore di probabilità di appartenenza alla materia grigia, bianca e al
liquido cerebrospinale rispettivamente 0.7, 0.2, 0.1 il voxel sarà assegnato alla maschera della
materia grigia.
Costruite le maschere, si ―mascherano‖ le immagini originali, ossia si estraggono
dall‘immagine originale i pixel corrispondenti ai diversi tipi di materia (materia bianca,
73
materia grigia e liquido cerebro spinale), ottenendo in questo modo le immagini vere e proprie
per ciascuna delle tre materie.
Standardizzazione
A questo punto si hanno tre gruppi di immagini sui cui è possibile applicare,
separatamente, il metodo di standardizzazione descritto nel Capitolo 3, si veda il blocco (2)
nella Figura 38. In questo lavoro di tesi si è scelto di applicare questo metodo di
standardizzazione utilizzando differenti tipi di landmark e confrontando tra loro i risultati. I
landmark scelti sono la moda, la mediana ed i decili.
Il codice è stato implementato in Matlab, e testato sia in Windows XP sia in linux.
Il processo di standardizzazione, come spiegato in precedenza, consta di due step.
Fase di training
Per effettuare la fase di training si sono considerati gli istogrammi relativi ad ogni
immagine. Per ogni istogramma si è individuata una regione di intensità d‘interesse (IOI),
scegliendo dall‘osservazione degli istogrammi un valore di percentile minimo pari a 0.5, ed
uno massimo, 99.5. Si è proceduto considerando i vari tipi di landmark scelti: la sola moda, la
sola mediana, e i decili; i valori stimati per ognuno di essi sono stati mappati su una scala
standard secondo la procedura descritta in precedenza.
Fase di trasformazione
In questo step per ogni immagine i valori delle intensità vengono mappati, attraverso una
trasformazione lineare a tratti dipendente dai landmark, sulla scala standardizzata ottenuta
nella prima fase.(Figura 40)
Se si applicasse il metodo di standardizzazione sull‘immagine del cervello completa si
rischierebbe, nella fase di trasformazione, di mappare intensità corrispondenti ad un
determinato tessuto in un'altra classe. Proprio per ovviare a questo inconveniente si è
applicato il processo separatamente sui tre gruppi di immagini (WM/GM/CSF). Si ha cosi la
certezza che i voxel relativi alla materia bianca, dopo la trasformazione, continuano ad
appartenere a questa classe di tessuto, e analogamente per e altre materie.
74
Figura 40: Mappatura lineare a tratti a) con tre landmark (es. lo 0.5° e il 99.5° percentile più la
moda); b) nel caso generale con più landmark (es. con i decili)
Una volta standardizzate le immagini relative ai tre tessuti, queste vengono sommate tra
di loro per ottenere l‘immagine normalizzata dell‘intero cervello, si veda il blocco (3) nella
Figura 38.
Applicazione e risultati
Il metodo descritto è stato applicato su 56 immagini appartenenti al database della LONI;
le scansioni sono acquisite tutte con lo stesso protocollo T1, ma con apparecchiature
differenti; esse possono rappresentare sia pazienti differenti sia lo stesso paziente che ha
effettuato l‘esame in periodi diversi. Si tratta di immagini che provengono anche da ospedali
diversi.
In Figura 41 si mostra un confronto tra gli istogrammi di sei scansioni di sei pazienti
differenti, prima della fase di normalizzazione. Le immagini sono state preventivamente
descalpate, per poter confrontare direttamente gli istogrammi con quelli standardizzati.
Si può notare che gli istogrammi, sebbene simili come andamento, sono però ben
differenti.
E stato applicato il software di standardizzazione, utilizzando come landmark dapprima la
sola mediana, e poi i decili. Ci aspettiamo che l‘uso dei decili porti a una standardizzazione
maggiormente accurata, come in effetti si verifica e come mostrano le figure seguenti.
Per confronto, è stata anche applicata la standardizzazione basata sulla moda, ma il
risultato è stato deludente. Ciò era atteso, perché spesso negli istogrammi la moda corrisponde
alla materia bianca, ma in altri casi è legata alla grigia, e in altri ancora a intensità intermedie
75
tra GM e WM. Quindi, nel momento in cui si mappa la moda nella scala standard, non si
conosce esattamente cosa si sta mappando. Questo inconveniente si supera quindi utilizzando
come landmark la mediana o i decili. Mostriamo dunque nel seguito solo i casi della mediana
e poi dei decili.
Scala dei grigi
Figura 41: Istogrammi di sei immagini non standardizzate provenienti da sei pazienti differenti
Dopo avere applicato alle immagini di Figura 41 la standardizzazione delle intensità
basata sulla mediana da sola, gli istogrammi assumono la seguente forma (Figura 42):
Scala dei grigi
Figura 42: Istogrammi delle immagini di Figura 36 dopo aver effettuato la standardizzazione basata
sulla mediana.
76
Dopo avere applicato la standardizzazione delle intensità basata sui decili, si ottengono
invece gli istogrammi seguenti:
Scala dei grigi
Figura 43: Istogrammi delle immagini di Figura 36 dopo aver effettuato la standardizzazione basata
sui decili.
Dalle figure si evince il buon funzionamento del software: infatti tutti gli istogrammi
risultano ovviamente non identici (non potrebbero esserlo, perché le immagini sono diverse e
contengono un numero di voxel diversi per le varie materie) ma ben sovrapposti.
In particolare, la qualità della standardizzazione operata a partire dai decili sembra
lievemente migliore rispetto a quella che si basa sulla mediana.
Come ulteriore esempio, di seguito si riportano gli istogrammi di sei immagini non
trattate, relative a due pazienti e provenienti da due ospedali diversi, per cui le scansioni sono
state acquisite con dispositivi differenti. Ogni paziente ha effettuato l‘esame di risonanza
magnetica per tre volte.
Al primo paziente corrispondono gli istogrammi di colore giallo, magenta e ciano; al
secondo quelli di colore blu, verde e rosso. Come si evince dalla Figura 44 gli istogrammi
relativi allo stesso paziente presentano andamento molto simile, mentre l‘andamento degli
istogrammi ottenuti dalle immagini acquisite in ospedali diversi è abbastanza differente.
77
Scala dei grigi
Figura 44: Istogrammi di sei immagini, non trattate, appartenenti a due pazienti provenienti da due
ospedali differenti.
Le figure seguenti mostrano gli istogrammi ottenuti dopo aver applicato il metodo di
standardizzazione basato sulla mediana e poi sui decili:
Scala dei grigi
Figura 45: Istogrammi delle immagini della figura precedente, appartenenti a due pazienti diversi e
provenienti da due ospedali differenti, standardizzati a partire dalla mediana
78
Scala dei grigi
Figura 46: Medesimi istogrammi della figura precedente, appartenenti alle immagini di due pazienti
provenienti da due ospedali differenti, dopo aver effettuato la standardizzazione sui decili.
Anche in questo caso si osservano gli stessi risultati ottenuti precedentemente:la qualità
della standardizzazione basata sui decili è migliore rispetto a quella basata sulla mediana.
Analisi quantitativa
Si è proceduto effettuando un‘analisi quantitativa, nello spirito di quanto proposto in [16].
Per ogni gruppo di immagini originali (GM, WM, CSF) si è calcolata l‘intensità media
normalizzata (NMI, Normalized Mean Intensity) ottenuta dividendo l‘intensità media delle
immagini (WM/GM/CSF singolarmente) per il range della regione (IOI): p2i – p1i. Anche per
le immagini trasformate è stata calcolata la NMI, questa volta ottenuta dividendo l‘intensità
media per il range s2 – s1.
In tabella si riporta la deviazione standard dei valori NMI prima e dopo aver applicato i
diversi metodi di standardizzazione.
I risultati ottenuti indicano che le intensità della scala standard presentano un significato
anatomico più consistente, come è possibile dedurre dal confronto tra le deviazioni standard, e
i valori per l‘uso della mediana e dei decili sono molto simili, mentre la scala standard
ottenuta tramite la moda è evidentemente molto meno accurata.
79
TISSUE
WM
METHOD
SD
None
0,725
Mode
0.318
Median
0,048
Percentiles
0,049
None
0,193
Mode
0.138
Median
0,027
Percentiles
0,028
None
0,062
Mode
0.038
Median
0,015
Percentiles
0,015
GM
CSF
Si conclude che il metodo di standardizzazione opera in maniera efficace, e che l‘uso della
mediana e dei decili per la standardizzazione sono abbastanza equivalenti, con un lieve
vantaggio per l‘ultimo caso indicato, come si verifica in particolare nell‘osservazione degli
istogrammi.
80
Conclusioni e prospettive
Il lavoro descritto in questa Tesi rientra nella cornice dell‘esperimento MAGIC5
dell‘INFN e si colloca, in particolare, all‘interno del progetto di realizzazione di un sistema di
diagnosi assistita precoce del morbo di Alzheimer.
Il software realizzato ha lo scopo di inserirsi nella procedura di estrazione delle scatole
ippocampali (ossia contenenti l‘ippocampo e strutture limitrofe) dalle immagini di risonanza
magnetica del cervello, prima della fase di diagnosi vera e propria della possibile atrofia.
Il sistema parte dalla letteratura scientifica sull‘argomento della standardizzazione delle
scale di intensità in MRI, e implementa uno dei metodi descritti, quello basato sui Landmark
negli istogrammi, con la variante di lavorare sulle singole materie componenti il tessuto
cerebrale: materia bianca, grigia e liquido cerebrospinale.
I primi test sul software sono soddisfacenti: gli istogrammi risultano standardizzati e
alcune valutazioni quantitative sui medesimi rispecchiano quanto suggerito in letteratura.
Ora, il prossimo passo sarà inserire il software nel sistema CAD in corso di realizzazione
in MAGIC5, per un test ―sul campo‖, allo scopo di verificare l‘aumento di qualità
nell‘estrazione delle scatole ippocampali.
Come prospettiva di sviluppo futuro, si prevede di confrontare il metodo con altri, in
particolare con l‘uso di miscele di gaussiane, per il quale il software è stato da noi già
parzialmente implementato.
81
Bibliografia
1. K. Blennow, et al. ‗Alzheimer's disease‘. Lancet 2006; 368: 387—403
2. C. A. Scorer, ―Preclinical and clinical challenges in the development of diseasemodifying therapies for Alzheimer’s disease.‖, Drug Discov Today 2001; 6: 1207–19.
3. R.E. Olson, R.A. Copeland, D. Seiffert ‖Progress towards testing the amyloid
hypothesis: inhibitors of APP processing‖ Curr Opin Drug Discov Devel 2001; 4:390–
401
4. D.J. Selkoe ―The genetics and molecular pathology of Alzheimer’s disease: roles of
amyloid and the presenilins.‖ Neurol Clin 2000; 18: 903–22
5. R. B. Maccioni, J. P. Munoz, L. Barbeito, ―The molecular bases of Alzheimer’s
disease and other neurodegenerative disorders‖ Arch Med Res 2001; 32: 367–81
6. B.A. In t‘ Veld, A.Ruitenberg, A.Hofman, et al. ―Nonsteroidal antiinflammatory drugs
and the risk of Alzheimer’s disease‖. N Engl J Med 2001; 345: 1515–21.
7. S. F. Weisen, W. H. Frishman, M. K. Aronson, S. Wassertheil-Smoller, ―Self-rated
health assessment and development of both cardiovascular and dementing illnesses in
an ambulatory elderly population: a report from the Bronx Longitudinal Aging
Study‖, Heart Dis 1999; 1: 201–5
8. H. Wolf, M. Grunwald, G. M. Ecke, et al., ―The prognosis of mild cognitive
impairment in the elderly.‖, J Neural Transm Suppl 1998; 54: 31–50.
9. D. W. O‘Connor, P. A. Pollitt, M. Roth, P. B. Brook, B. B. Reiss, ―Memory
complaints and impairment in normal, depressed, and demented elderly persons
identified in a community survey‖, Arch Gen Psychiatry 1990; 47: 224–7.
82
10. T. Sunderland, J. L. Hill, A. M. Mellow, et al., ―Clock drawing in Alzheimer’s disease.
A novel measure of dementia severity‖, J Am Geriatr Soc 1989; 37: 725–9.
11. R. C. Petersen, J. C. Stevens, M. Ganguli, E. G. Tangalos, J. L. Cummings, S. T.
DeKosky, ―Practice parameter: early detection of dementia: mild cognitive
impairment (an evidence-based review)‖, Report of the Quality Standards
Subcommittee of the American Academy of Neurology. 2001; 56: 1133–42.
12. J. P. Hornak, ―Basics of MRI‖ http://www.cis.rit.edu/htbooks/mri/inside-i.htm
(accesso: Gennaio 2010)
13. A. Castellano, G. De Nunzio e M. Donativi, ― Fisica e tecnica delle apparecchiature
biomediche‖, Deltaedit (Arnesano – Lecce) Maggio 2009
14. www.risonanzamagnetica.org. ―Risonanza Magnetica e Safety - Principi fisici di
risonanza magnetica‖ (accesso: Gennaio 2010)
15. G. Rescinito, C. Sirlin, G. Cittadini Jr “Body MRI artefacts: from image degradation
to diagnostic utility”, Radiol. Med. 114:18–31, 2009
16. L. G. Nyúl, J. K. Udupa, and X. Zhang, ―New variants of a method of MRI scales
standardization‖, IEEE Trans. Med. Imag., vol. 19, no. 2, pp. 143–150, Feb. 2000.
17. Z. Hou ―A review on MR image intensity inhomogeneity correction‖, International
Journal of Biomedical Imaging, vol.2006, pp. 1-11, Feb.2006
18. F. Jäger and J. Hornegger, ―Nonrigid registration of joint histograms for intensity
standardization in magnetic resonance imaging‖, IEEE Trans. Med. Imag., vol. 28,
no. 1, January 2009.
19. U. Vovk, F. Pernuš, and B. Likar, ―A review of methods for correction of intensity
inhomogeneity in MRI‖, IEEE Trans. Med. Imag., vol. 27, no. 3, March 2007.
83
20. L. G. Nyúl and J. K. Udupa, ―On standardizing the MR image intensity scale,‖ Magn.
Reson. Med., vol. 42, pp. 1072–1081, 1999.
21. P. Hellier, ―Consistent intensity correction of MR images‖ in Int. Conf. Image Process.
(ICIP 2003), vol. 1, pp. 1109–12.,Sept. 2003.
22. J. P. Bergeest and F. Jäger, ―A comparison of five methods for signal intensity
standardization in MRI‖, Bildverarbeitung für die Medizin 2008, Algorithmen,
Systeme, Anwendungen, Proceedings des Workshops vom 6. bis 8. April 2008
(Berlin)
23. W R Crum, T Hartkens and D L G Hill, ―Non-rigid image registration: theory and
practice‖ British Journal of Radiology 77, S140-S153, 2004
24. G. Arnulfo ―Tecniche di coregistrazione affine ed elastica su immagini mediche
strutturali per il supporto alla chirurgia dell’epilessia‖ Tesi di laurea specialistica in
Ingegneria Biomedica, Università di Genova, Facoltà di Ingegneria (aa 2006/07),
(http://www.premiocdi.org/Archivio/2008/arnulfo_abstract.pdf,
accesso:
Dicembre
2009)
25. J. Ashburner and K. J. Friston, ―Rigid-body registration‖, in R.S.J. Frackowiak, K.J.
Friston, C. Frith, R. Dolan, K.J. Friston, C.J. Price, S. Zeki, J. Ashburner, and W.D.
Penny, editors, Human Brain Function (Ch. 2). Academic Press, 2nd edition, 2003
(http://www.fil.ion.ucl.ac.uk/spm/doc/books/hbf2/pdfs/Ch2.pdf, accesso: Dicembre
2009)
26. D. Rizzo, ―Registrazione multimodale 3D di immagini medicali‖ Tesi di laurea in
Ingegneria Informatica, Università degli Studi di Palermo - Facoltà di Ingegneria (a.a.
2003-04)
27. Statistical Parametric Mapping , http://www.fil.ion.ucl.ac.uk/spm/
28. G. J. McLachlan, S. Ng, and R. Bean, ―Robust Cluster Analysis via Mixture Models”,
Austrian journal of statistics, Volume 35, Number 2&3, 157–174, 2006
84
29. J. Ashburner and K. J. Friston, ―Image segmentation‖, in R.S.J. Frackowiak, K.J.
Friston, C. Frith, R. Dolan, K.J. Friston, C.J. Price, S. Zeki, J. Ashburner, and W.D.
Penny, editors, Human Brain Function. Academic Press, 2nd edition, 2003
(http://www.fil.ion.ucl.ac.uk/spm/doc/books/hbf2/pdfs/Ch5.pdf, accesso: Dicembre
2009)
85
Ringraziamenti
Giunta alla fine di questo lavoro desidero ringraziare ed esprimere la mia riconoscenza
nei confronti di tutte le persone che, in diversi modi, mi sono state accanto e che mi hanno
sostenuta durante tutto il mio percorso universitario. Rimarrà in me il piacevole ricordo di
questi anni di studio che ho trascorso a “tempo pieno” in questo dipartimento e per aver
trovato quasi sempre professori disponibili al dialogo.
In particolare, desidero ringraziare colui che ha reso possibile il raggiungimento di
questo traguardo: il Professor Giorgio De Nunzio . La mia gratitudine nasce dalla fiducia sin
da subito dimostratami nell’avermi accettata nel suo gruppo di lavoro. I consigli e i confronti
sono stati indispensabili ad intraprendere, ogni volta, le scelte più appropriate. Con la sua
pazienza e professionalità ha ricoperto un ruolo fondamentale nella mia carriera
universitaria. Semplicemente GRAZIE!
Un doveroso grazie anche al Dott. Marco Favetta e alla Dott. Gabriella Pastore per il
loro aiuto e per la loro disponibilità.
Sono grata ai miei genitori e a mio fratello per il sostegno morale, tacito o esplicito.
Grazie per tutte le volte che mi avete incoraggiata vedendomi presa dai libri, dagli esami, ma
soprattutto da questa tesi! Sparo che i sacrifici spesi siano, almeno in parte, ripagati.
Grazie a tutti i miei amici, dell’Università e non, ma soprattutto alle mie amiche di
sempre e compagne di quest’avventura. Sappiamo di poter contare le une sulle altre, la
nostra amicizia c’è e ci sarà sempre qualsiasi cosa accada.
Ad Antonello va un ringraziamento speciale: anche se a distanza sei stato sempre
presente, in ogni momento e situazione.
Ringrazio tutto il resto della mia famiglia per aver sempre creduto in me, per avermi
“supportata” oltre che “sopportata”.
Non può mancare un infinito grazie ad una Donna che aspettava e viveva questi momenti
con una felice frenesia tutta sua: grazie nonna per tutto quello che mi hai insegnato. Farò
tesoro della tua forza e ti porterò sempre nel mio cuore.