UNIVERSITA' DEGLI STUDI DI NAPOLI
FEDERICO II
FACOLTA' DI SCIENZE MATEMATICHE,
FISICHE E NATURALI
TESI DI LAUREA IN FISICA
Teoria neutrale dell'evoluzione molecolare
Relatore
Candidato
Prof. Gennaro Miele
Andrea Maria Chiariello
matr. N85/007
ANNO ACCADEMICO 2010/2011
Indice
Introduzione
1
Capitolo 1: Teoria neutrale
3
1.1 Le forze evolutive: drift genetico e mutazione
1.2
Il concetto di dimensione effettiva Ne
3
9
1.3 Coalescente
11
1.4 Relazione tra la natura stocastica del drift e il determinismo di G e H
13
Capitolo 2: Teoria di Darwin e pressione selettiva
16
2.1 I parametri della selezione
16
2.2 I tre tipi di selezione
18
2.3 Equilibrio selezione – mutazione e interazione selezione – drift
20
2.4 Ambiente e migrazione
23
Capitolo 3: Un modello di evoluzione
27
Appendice
32
A.1 La legge di Hardy – Weinberg
32
A.2 Dimostrazione sulla probabilità di fissazione
34
Bibliografia
35
Introduzione
L’oggetto della trattazione esposta in questo lavoro è una presentazione delle due teorie
evoluzionistiche fondamentali: la teoria di Darwin, basata sul concetto di selezione naturale, e la
teoria neutrale, di più recente sviluppo, ad opera di Motoo Kimura, basata sull’idea che le mutazioni
neutrali sono responsabili ( principalmente ) dell’evoluzione.
Le questioni affrontate nelle seguenti pagine sono soprattutto incentrate sugli aspetti matematici
presenti nelle teorie suddette, con particolare attenzione ai vari modelli utilizzati per descriverne i
sistemi considerati, ovvero le popolazioni. Da questo punto di vista, lo studio di tali sistemi si basa
su metodi sviluppati nell'ambito della Meccanica Statistica, come l'analisi del punto finale per
verificare l'esistenza di un valore di equilibrio, applicato a grandezze che descrivono lo stato della
popolazione, oppure la teoria della diffusione, applicata a un insieme di individui. Grazie a questo
approccio, di cui il presente lavoro vuole essere un esempio introduttivo, è possibile modellizzare
sistemi di notevole complessità, dapprima considerando situazioni ideali semplici da descrivere, e
poi passando ad un livello superiore tenendo conto di fenomeni precedentemente trascurati,
rendendo così la descrizione maggiormente conforme alla realtà.
Di una popolazione ciò che interessa in questo caso è la descrizione della sua struttura genetica,
nonché delle forze che agiscono in essa e ne determinano l’evoluzione. Naturalmente, una totale
conoscenza di questo genere è impossibile perché significherebbe non solo descrivere il genoma e
la posizione di ogni individuo ad ogni istante, ma anche i cambiamenti casuali che continuamente
intervengono a modificare lo stato della popolazione.
E’ necessario pertanto semplificare la complessità delle popolazioni reali sia dal punto di vista
genetico, sia dal punto di vista delle sue dinamiche relative alla riproduzione: per quanto riguarda il
primo aspetto, si considererà il processo evolutivo soltanto di uno o pochi “loci” ( cioè dei luoghi
sui cromosomi che contengono un certo gene ); d’altro canto, si supporrà che l’accoppiamento
avvenga in modo del tutto casuale, o, come si dice usualmente, che ci sia un regime di “random
mating”. Più precisamente, con random mating si indica la circostanza secondo cui gli individui si
accoppiano ignorando completamente il fenotipo, la parentela, la posizione geografica.
Una prima applicazione di queste semplici ipotesi è rappresentata dalla legge di Hardy – Weinberg,
che descrive l’equilibrio di un singolo locus somatico in una popolazione diploide, composta da un
numero infinito di individui, trascurando qualunque tipo di forza evoluzionaria agente in essa (come
le mutazioni del DNA). Nella situazione più elementare, si considera un locus in cui segregano (
ovvero il locus può essere caratterizzato da varianti geniche differenti ) due alleli A1 e A2 con
frequenze p e q rispettivamente, in una qualche generazione; la legge afferma che le frequenze
1
genotipiche x( AiAj ) relative al locus in questione dipendono, all’equilibrio, soltanto dalle
frequenze alleliche p e q secondo le relazioni:
x( A1A1 ) = p2
x( A1A2 ) = 2pq
x( A2A2 ) = q2.
Poiché le frequenze p e q sono uguali per tutte le generazioni, essendo infinito il campione, una
volta raggiunto l’equilibrio, la legge di Hardy – Weinberg implica che le frequenze genotipiche
restano anch’esse le stesse per le varie generazioni. Inoltre, essendo le quantità p e q legate dalla
relazione q = 1 – p, è sufficiente la conoscenza della sola p ( oppure q ) per prevedere la struttura
genetica della popolazione.
In una popolazione ermafrodita, nota p, il tempo necessario affinché il sistema raggiunga
l’equilibrio è di una generazione, mentre per una popolazione sessuata, dove le frequenze alleliche e
e genotipiche dipendono, in generale, dal sesso, sono necessari due cicli di random mating. In
APPENDICE A.1 è discussa la dimostrazione di quanto affermato.
Naturalmente, le popolazioni reali sono ben lungi dall’essere caratterizzate dalle condizioni
dell’equilibrio di Hardy – Weinberg; tuttavia, esistono esempi concreti di raggruppamenti umani
locali che presentano frequenze genotipiche relative a certi geni in accordo con le previsioni della
legge suddetta, a testimonianza del fatto che tali gruppi hanno storicamente seguito un ciclo
compatibile, almeno approssimativamente, con un regime di random mating. La distribuzione delle
frequenze relative all’allele della fosfatasi alcalina nella popolazione inglese è un esempio di questo
fenomeno.
2
Capitolo 1
Teoria neutrale
Tradizionalmente, lo studio dell'evoluzione è basato solo sulle strutture visibili degli organismi,
come le ali degli uccelli, i colli delle giraffe, i denti dei cavalli e così via. Il principio guida
nell'interpretazione sui cambiamenti dei fenotipi è stato il concetto di selezione naturale, sviluppato
da Darwin nell'opera “L' Origine della Specie”, di cui si parlerà in seguito. All'epoca di Darwin,
tuttavia, non erano ancora noti i meccanismi di trasmissione dei caratteri, scoperti da Mendel, e
soprattutto non era conosciuto il DNA e la sua struttura. Con la nascita della genetica molecolare, è
stato possibile indagare sui processi evolutivi a un livello più profondo rispetto a quello basato
esclusivamente sull'osservazione dei fenotipi.
Attraverso studi comparati di sequenze di amminoacidi relative a proteine omologhe tra organismi
affini, ad esempio l'emoglobina nei vertebrati, è possibile ricostruire il percorso dei cambiamenti
degli amminoacidi e stimare il loro tasso di sostituzione. Da questi si deduce poi il tasso di
sostituzioni dei nucleotidi nei geni che codificano per le proteine in esame. Si trova che il tasso di
accumulazione di mutazioni nelle varie specie nel corso dell'evoluzione è molto più alto di quello
previsto dalla teoria di Darwin. Da qui lo sviluppo della teoria neutrale, secondo cui la grande
maggioranza delle sostituzioni mutanti che provocano l'evoluzione e della variabilità tra le specie
non sono causate dalla selezione naturale, ma da fissazione casuale di mutanti neutrali o quasi
neutrali rispetto alla selezione. Nella teoria si ammette comunque la possibilità di mutazioni non
neutrali, che sono quindi oggetto di selezione, favorevoli per l'adattamento dell'individuo che ne è
portatore; tuttavia queste mutazioni avvengono con una frequenza talmente bassa da contribuire
poco all'evoluzione complessiva. L'evoluzione effettiva è dunque dovuta ad una matrice puramente
casuale, laddove il destino dei mutanti che compaiono nella popolazione, se equivalenti alle forme
preesistenti, è completamente affidato al caso.
1.1 Le forze evolutive: drift genetico e mutazioni
Come già detto, le ipotesi alla base della legge di Hardy – Weinberg sono troppo semplici per
descrivere una popolazione reale; innanzitutto, è necessario tenere conto, nelle dinamiche evolutive,
della dimensione finita della popolazione, ovvero del numero di individui presenti, che nel modello
3
precedente risulta infinito. Come conseguenza, si devono considerare i cambiamenti casuali nelle
frequenze alleliche ( costanti nella popolazione di Hardy - Weinberg ), dipendenti da due fattori
principali: la diversità del numero di figli dei vari individui e la legge di Mendel. Consideriamo per
esempio una popolazione di quattro elementi, 2 maschi e 2 femmine, e consideriamo un locus in cui
segregano 2 alleli, bianco e nero; supponiamo che le frequenze alleliche siano p = q = ½ e che i
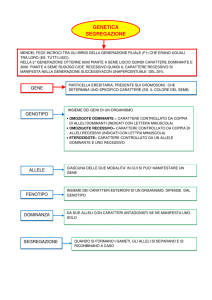
genotipi siano 2 omozigoti (maschi ) e 2 eterozigoti ( femmine ), come mostrato in FIGURA 1.
Nella seconda generazione una possibile distribuzione delle frequenze alleliche è quella
rappresentata in figura, dove il risultato della ricombinazione è p = 3/8 per il nero e q = 5/8 per il
bianco, diverse dalla prima generazione. Ripetiamo comunque che la variazione delle frequenze
alleliche è un processo rigorosamente stocastico.
Prima
generazione
Maschi
Femmine
Gameti
Random mating
Seconda
generazione
FIGURA 1: Esempio di variazione delle frequenze alleliche dopo un ciclo di random mating
Questi cambiamenti sono indicati genericamente con la locuzione “drift genetico”; affiancando a
quest'ultimo le mutazioni del codice genetico, si ottiene l'insieme delle due forze fondamentali per
l'evoluzione nella teoria neutrale. Per comprendere quantitativamente l'azione del drift consideriamo
una popolazione diploide di N individui ermafroditi e introduciamo una variabile G che ne descrive
lo stato geneticamente. Questa variabile è definita come la probabilità che due geni distinti, relativi
4
ad un certo locus, scelti a caso nell'insieme dei 2N totali siano identici per stato, ovvero sono
caratterizzati dalla stessa sequenza nucleotidica e codificano quindi per lo stesso carattere. In
pratica, G è una misura della varietà genetica nella popolazione: se G = 0, tutti gli alleli sono
diversi tra loro; se G = 1, non c'è
varietà e l'allele è unico. Nello spirito della teoria neutrale, supponiamo che tutti gli alleli siano
equivalenti rispetto alla pressione selettiva, cioè nessuno presenta un vantaggio per sopravvivere
rispetto agli altri.
Dopo una generazione, il valore di G cambia secondo la relazione:
G' = 1 / 2N + ( 1 – 1 / 2N ) G ;
nella generazione successiva, due geni scelti a caso possono essere uguali in due modi: i due geni
sono copie dello stesso gene nella generazione precedente, e ciò avviene con probabilità 1 / 2N,
oppure non sono copie dello stesso gene, ma i loro geni genitori sono identici tra loro, e questo
avviene con probabilità ( 1 – 1 / 2N ) G.
A questo punto, conviene introdurre la quantità H = 1 – G, tale che:
H' = 1 – G' = ( 1 – 1 / 2N ) H
da cui:
ΔH = – H / 2N.
Poiché H rappresenta la probabilità che due geni scelti a caso sono diversi per stato, si nota che il
drift tende a diminuire la varietà genetica della popolazione, essendo la variazione di H negativa
sempre. L'effetto del drift è inoltre più blando nelle popolazioni con N grande, e quindi si manifesta
su tempi molto lunghi. Supponendo che H0 sia il valore iniziale di H, dopo t generazioni si ha:
Ht = H0 ( 1 – 1 / 2N )t.
Il tempo necessario affinché Ht si dimezzi è dato da:
t1/2 = 2Nln2 ,
che è proporzionale ad N, in accordo con quanto osservato in precedenza sull'effetto del drift in
5
popolazioni grandi.
Se il drift tende ad eliminare la varietà genetica nella popolazione, ciò significa che sopravviverà un
solo allele tra quelli presenti inizialmente; tale evento si chiama fissazione dell'allele in questione.
La probabilità di un evento simile è data proprio dalla frequenza iniziale dell'allele stesso. Questo è
vero per tutti gli alleli che segregano nel locus considerato. Il motivo di questa semplice quanto
importante affermazione sta nel fatto che gli alleli sono equivalenti, uguali insomma agli occhi della
selezione naturale.
L'altra grande forza responsabile dell'evoluzione di una popolazione è la mutazione del codice
genetico. Questa agisce in maniera opposta al drift introducendo di continuo nuovi alleli,
compensando l'effetto di appiattimento del drift e arricchendo la varietà dell'insieme dei geni
presenti. Le mutazioni rappresentano una generica variazione della sequenza nucleotidica che
costituisce un certo gene, comportando quindi una possibile modificazione del carattere per cui quel
gene codifica; si possono distinguere due tipi di mutazioni: sostituzioni semplici di un solo
nucleotide ( o equivalentemente di una base ) nella catena, oppure cambiamenti strutturali come
delezioni o inserzioni di uno o più nucleotidi, fino ad arrivare alla trasposizione di segmenti di DNA
più lunghi. Dal confronto fra geni omologhi di organismi all'interno di varie specie, risulta che le
sostituzioni di singoli nucleotidi sono molto più frequenti; ne segue che queste mutazioni
rappresentano i principali cambiamenti a livello molecolare dovuti all'evoluzione. Nell'ambito delle
sostituzioni di singoli nucleotidi, si distinguono poi quelle che causano sostituzioni di amminoacidi
nella catena che codificano e quelle che lasciano invariata la sequenza ( sostituzioni silenti ), dovute
alla degenerazione del codice genetico.
All'interno di una popolazione, è l'interazione fra le due tendenze citate a favorire l'evoluzione. Per
descriverla quantitativamente, il punto di partenza è il modello di una popolazione soggetta al drift
discussa in precedenza, introducendo questa volta la probabilità di mutazioni; lo scopo è trovare
l'espressione della variabile H che descrive lo stato del sistema, quando questo è all'equilibrio.
Si definisce un tasso di mutazione u all'interno di un gamete, relativamente ad un locus specifico,
che è il numero medio di mutazioni che intervengono ad ogni generazione; questa quantità
rappresenta in pratica la probabilità di mutazione per generazione. Poiché in una popolazione
diploide di N individui si hanno 2N cromosomi in totale, ad ogni generazione compariranno, in
media, 2Nu mutanti. In questo modello, si suppone che ogni mutazione genera una sequenza
nucleotidica unica, non preesistente nella popolazione. Questa ipotesi è lecita in quanto nelle
popolazioni reali segregano un numero grande in generale di alleli, che però risulta piccolo se
confrontato con il numero totale di possibili sequenze per un locus di un certo gene. Si parla
pertanto di modello “ad infiniti alleli”; ad esempio, per un locus di 1000 nucleotidi, ci sono 4 1000
possibili sequenze, nonché 3000 possibili mutanti raggiungibili con una singola sostituzione, per
6
cui la probabilità di tornare all'allele iniziale con una ulteriore sostituzione è di 1/3000, del tutto
trascurabile.
Anche in questo caso si assume un regime di random mating; in tal modo il valore di G dopo una
generazione è dato da:
G' = ( 1 – u )2 ( 1 / 2N + ( 1 – 1 / 2N ) G ) ;
questa espressione differisce dalla precedente per la presenza del fattore ( 1 – u )2,
che rappresenta la probabilità che due geni presi a caso non abbiano subito una mutazione. Poiché u
risulta in generale piccolo ( da 10-5 fino a 10-9 circa ), si sviluppa ( 1 – u )2 al primo ordine 1 – 2u;
trascurando i contributi in u / N, si ha:
G' = 1 / 2N + ( 1 – 1 / 2N ) G – 2uG.
Portando G a primo membro e dividendo per dt, si ottiene l'equazione differenziale:
dG / dt = 1 / 2N – ( 2u + 1 / 2N ) G
la quale ha per soluzione :
G = Geq + ( Geq – G0 ) exp[ – ( 2u + 1 / 2N ) t ] ,
laddove:
Geq = 1 / ( 4Nu + 1 ).
Questa quantità rappresenta il valore atteso di G all'equilibrio. Se la popolazione non è
all'equilibrio, essa tende a questo stato con una “velocità” di ( 1 + 4Nu ) / 2N per generazione. Ciò
significa che se la dimensione è grande, è necessario un tempo estremamente lungo affinché venga
raggiunto l'equilibrio.
Considerando che H = 1 – G, risulta:
Heq = 1 – Geq = 4Nu / ( 1 + 4Nu ).
Alternativamente, è possibile ricavare questa relazione imponendo che la variazione di H sia nulla
7
all'equilibrio, ovvero:
H' = 1 – G' = 1 – 1 / 2N + ( 1 / 2N – 1 ) ( 1 – H ) + 2u ( 1 – H ) = ( 1 – 1 / 2N ) H + 2u ( 1 – H ) .
La variazione di H ad ogni generazione è:
ΔΗ = – H / 2N + 2u ( 1 – H ) ;
e all'equilibrio, dovendo essere ΔΗ = 0, si ha:
H = Heq = 4Nu / ( 1 + 4Nu ) .
Dall'espressione di ΔΗ si nota che le mutazioni introducono una tendenza all'aumento di H,
descritta dalla quantità ΔuH = 2u ( 1 – H ), che è sempre positiva. Se u = 0, cioè eliminando la
possibilità di mutazioni, ΔΗ assume la forma trovata per la popolazione soggetta al solo drift.
L'intensità relativa tra drift e mutazione è descritta dalla quantità 4Nu: se questa è piccola, allora la
tendenza dominante è il drift, e la variabilità genetica è rimossa quasi del tutto dalla popolazione;
viceversa, se 4Nu è grande, la mutazione domina e la popolazione è molto varia.
Il modello appena esposto consente di calcolare il tasso di sostituzione k di mutazioni neutrali, che è
dato dal numero medio di mutazioni subentranti ad ogni generazione per la frazione v di quelle che
si fissano nella popolazione: la prima quantità è data da 2Nu, mentre la seconda è data da
v
= 1 / 2N, che è la frequenza iniziale di un allele mutante ( nel modello ad infiniti alleli ), e
rappresenta proprio la probabilità di fissazione dell'allele stesso, ammesso che questo sia neutrale;
se l'allele non fosse neutrale, ma soggetto ad una pressione selettiva, l'espressione della probabilità
v va sostituita con una più generale che tiene conto della non neutralità del mutante, come si vedrà
in seguito. Il tasso k risulta pertanto:
k = 2Nuv = u ,
cioè il tasso di sostituzione, e quindi l'evoluzione, di alleli neutrali è uguale al tasso di mutazione
degli stessi, e risulta quindi indipendente dalla dimensione della popolazione.
Si è detto che u è il tasso di mutazione per allele per generazione; poiché un allele è una sequenza di
nucleotidi, allora u risulterà dalla composizione delle mutazioni che avvengono sui singoli siti
nell'allele. A questo livello, si suppone che ogni qual volta ci sia una mutazione, questa coinvolge
sempre un sito diverso; in altre parole, la sequenza di nucleotidi è considerata infinita, e per questo
8
si parla di modello ad “infiniti siti”. Conseguenza di ciò è che il tasso di mutazione per nucleotide,
U = u / n, con n numero di nucleotidi nella sequenza, è molto basso; il tasso di sostituzione per sito
K è ovviamente K = U. Da tutto ciò risulta inoltre che, se è noto K, è possibile risalire ad u
assumendo che le varie mutazioni occorse nel tempo siano neutrali. Ad esempio, la Drosophila
melanogaster e la Drosophila erecta differiscono per 36 dei 768 nucleotidi del gene che codifica per
l'alcool deidrogenasi ADH; assumendo, come risulta da studi sui geni, che le due specie si sono
separate 23 milioni di anni fa e che ci sono state esattamente 36 sostituzioni lungo le linee parentali
che hanno condotto alle due specie, allora il tasso di sostituzione per sito è:
K = ( 36 / 768 ) / ( 2*23000000) mutazioni/sito*anno ≈ 10-9
Il fattore 2 a denominatore tiene conto del fatto che il tempo che separa le due specie è la somma
dei tempi che conducono fino all'antenato comune. Assumendo che le sostituzioni siano neutrali,
deve essere K = U, per cui, supponendo che la Drosophila produce una generazione all'anno, il tasso
di mutazione per generazione è proprio il valore calcolato in precedenza.
Poiché il tasso di sostituzioni dipende solo dal tasso di mutazioni, che dipende a sua volta dal gene,
è ragionevole aspettarsi che il tasso di sostituzioni sia approssimativamente lo stesso per diversi
gruppi di specie. In effetti questa è una previsione abbastanza corretta confermata dai dati
sperimentali, dove il tasso di evoluzione annuale per una data molecola, ad esempio l'emoglobina, è
costante per linee parentali di diverse specie, in accordo con la teoria neutrale. Di contro,
l'espressione di k che si ricava sulla base della teoria di Darwin, come si vedrà, dipende da
parametri strettamente correlati con il tipo di specie, cosa che contrasta con le osservazioni
sperimentali, deponendo quindi maggiormente a favore della teoria neutrale.
1.2 Il concetto di dimensione effettiva Ne
Nei modelli utilizzati finora per descrivere le popolazioni si è assunto, tra le altre cose, che la
dimensione resti constante al variare delle generazioni; ovviamente, per le popolazioni reali, ciò non
è vero. Le dimensioni fluttuano casualmente e in maniera spesso larga, rendendo il sistema
estremamente complesso da trattare. E' pertanto conveniente ridurre la complessità della realtà,
riconducendo il sistema ad uno equivalente molto più semplice da descrivere matematicamente.
Questo obiettivo si realizza in modo elegante definendo una dimensione effettiva Ne, che
rappresenta la dimensione di una popolazione idealizzata conforme al modello di Wright – Fisher,
in cui la popolazione è ermafrodita e soggetta al random mating, in cui inoltre le generazioni non si
9
sovrappongono e la dimensione è costante. Nel caso di una popolazione soggetta a variazioni della
dimensione, Ne si ricava imponendo che il tasso di decadimento della variabile H introdotta in
precedenza è lo stesso per la popolazione ideale e per quella reale.
Supponiamo ad esempio che, nella prima generazione, sia N1 la dimensione della popolazione reale,
N2 nella seconda e così via. Il valore di H nella generazione t-esima sarà:
Ht+1 = Ht ( 1 – 1 / 2Nt ) ,
e quindi:
Ht = H0 Πi ( 1 – 1 / 2Ni ) .
Dalla definizione di dimensione effettiva si ottiene:
H0 ( 1 – 1 / 2Ne )t = H0 Πi ( 1 – 1 / 2Ni ) .
Riscrivendo il primo membro come esponenziale del logaritmo naturale, che poi diventa una
somma di logaritmi, e sviluppando questi ultimi al primo ordine, si ottiene exp[ – t/2Ne ], mentre,
procedendo il maniera analoga per il secondo membro, si ricava l'uguaglianza:
exp[ – t / 2Ne ] = exp[ – Σi = 0 1 / 2Ni ] ,
da cui:
Ne = 1 / [ ( 1 / t ) Σi = 0 1 / Ni ] .
Questa espressione per la dimensione effettiva coincide con la media armonica delle dimensioni che
la popolazione reale assume durante le varie generazioni. Il risultato è molto interessante perché la
media armonica è molto sensibile ai valori piccoli che la compongono. Quindi, per popolazioni che
subiscono brusche diminuzioni nella dimensione, dovuti per esempio a flussi migratori o
cambiamenti climatici, la dimensione effettiva sarà considerevolmente più piccola di quella tipica.
Un evento simile viene chiamato “collo di bottiglia” o “bottleneck”.
Un altro fattore che influenza la dimensione effettiva è la diversità del numero di individui
10
appartenenti a sessi differenti nelle popolazioni diploidi, dove il numero di maschi è Nm e il numero
di femmine è Nf. La dimensione effettiva si ottiene partendo dalla varianza della frequenza allelica
p', assegnata la frequenza p della generazione precedente ( di cui si dimostra l'espressione nel
paragrafo 1.4 ):
var( p' | p ) = p ( 1 – p ) / 2N .
Si uguaglia quindi la varianza della popolazione reale con quella di una popolazione idealizzata di
dimensione Ne, e si ricava la relazione:
Ne = p ( 1 – p ) / 2 [ p ( 1 – p ) / 8Nm + p ( 1 – p ) / 8Nf ] ,
che fornisce, semplificando, l'espressione cercata:
Ne = 4Nm Nf / ( Nm + Nf ) .
Anche in questo caso, la dimensione effettiva dipende principalmente dal numero di individui
appartenenti al sesso con meno esponenti, e inoltre si riduce alla dimensione reale N se Nm = Nf =
N /2
1.3 Coalescente
Nel paragrafo 1.1 si è detto che la quantità 4Nu fornisce una misura della varietà genetica della
popolazione. Posto 4Nu = θ, è quindi di notevole interesse avere una stima di questo parametro, che
si può ottenere efficacemente con la tecnica del coalescente. Questo rappresenta l'insieme delle
stirpi di un set di alleli preso dalla popolazione, partendo da ciascun allele del set e andando a
ritroso nel tempo fino all'antenato comune. Si tratta quindi di una sorta di albero genealogico per
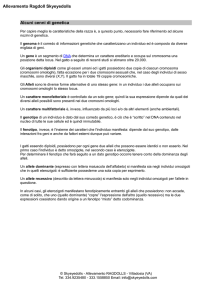
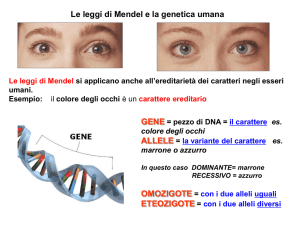
alleli. In FIGURA 2 è rappresentato un coalescente a 4 alleli; le generazioni t i indicate sono quelle
in cui si registra un antenato comune tra due alleli. In questa circostanza, si dice che è intervenuta
una coalescenza, e il numero di linee parentali si riduce di uno.
Consideriamo un set di n alleli. Naturalmente, non c'è modo di sapere le relazioni di parentela tra i
vari alleli del set e nemmeno i tempi ti che portano ad un antenato comune; questi tempi sono
comunque legati tra loro dalla relazione:
11
t2
t3
t4
FIGURA 2: Coalescente di 4 alleli
Tc = ntn + ( n – 1 ) ( tn-1 – tn ) + ….. + 2( t2 – t3 ) ,
dove Tc è il tempo totale nel coalescente, ovvero la somma dei prodotti dei tempi che intercorrono
tra due coalescenze consecutive per il numero di linee presenti in questo intervallo di tempo. Per
esempio, con riferimento alla figura, alla quarta generazione sono presenti quattro linee, tra la terza
e la quarta ce ne sono tre, e così via. Se u è il tasso di mutazioni neutrali, allora il valore atteso del
numero di mutazioni è uTc; in realtà di questo numero si ha già una stima, che è il numero di siti di
segregazione Sn presenti sui vari alleli del set e per i quali essi differiscono tra loro. Per dare una
stima del tempo Tc, è necessario dare una stima dei singoli ti, che si ottiene nel seguente modo.
La probabilità Q che tutti gli alleli nel set non abbiano antenati comuni nella generazione
precedente è data dalla quantità:
Q = ( 1 – 1 / 2N ) ( 1 – 2 / 2N ) ( 1 – 3 / 2N ) … ( 1 – ( n – 1 ) / 2N ) ≈ 1 – 1 / 2N – 2 / 2N – …
… – ( n – 1 ) / 2N ,
dove sono stati trascurati i contributi in ( 1 / N )2 e superiori. La probabilità P che esiste almeno una
coppia di questi alleli aventi un antenato comune è quindi:
P = 1 – Q = [ 1 + 2 + … + ( n – 1 ) ] / 2N = n ( n – 1 ) / 4N .
La generazione in cui si verifica una generica coalescenza è rappresentata da una variabile
discreta ) indicata con un indice i, descritta da una distribuzione di probabilità geometrica dove la
12
(
probabilità di successo è proprio P; poiché la media di una distribuzione geometrica è 1 / P – 1, la
generazione attesa E( ti ) in cui avviene l'evento di una coalescenza sarà:
E( ti ) = 4N / [ i ( i – 1 ) ] – 1 ≈ 4N / [ i ( i – 1 ) ] ,
dove l'approssimazione vale se i << N; da questa si ricava il tempo totale nel coalescente Tc:
E( Tc ) = Σi = 2 i E( ti ) = 4N Σi = 2 1 / ( i – 1 ) ,
essendo i il numero di linee dopo l' i-esima generazione. Il numero atteso di mutazioni è quindi:
E( Sn ) = u E( Tc ) = ( 4Nu ) Σi = 2 1 / ( i – 1 ) = θ Σi = 2 1 / ( i – 1 )
Disponendo del numero di mutazioni nel set di alleli Sn, si ottiene finalmente la stima del parametro
θ.
1.4 Relazione tra la natura stocastica del drift e il determinismo di
GeH
L'andamento di G e H, come si nota, è monotòno. Questo è apparentemente in contrasto con il fatto
che alla base di tutto ci sono dei cambiamenti casuali. Le previsioni ben delineate che si ottengono
dalle leggi ricavate su G e H si conciliano con il background stocastico dell'evoluzione se si
considera che leggi stesse ne rappresentano una tendenza media. Se prendiamo un set di
popolazioni con le stesse condizioni iniziali, ciascuna presenterà un percorso evolutivo diverso
dagli altri; quindi, per ogni sistema, ci saranno vari valori di G e H ad ogni generazione. La loro
media fornirà i valori calcolati di G e H, e l' evoluzione della media è data proprio dalle leggi
trovate.
Per dimostrare quanto affermato, consideriamo una popolazione e un locus biallelico dove segrega
con frequenza p un allele A. La probabilità di ritrovare un solo allele A nella generazione
successiva è data dalla sua frequenza, mentre la probabilità di ritrovare i alleli del tipo A è la stessa
probabilità di avere i esiti positivi su un insieme di 2N esperimenti indipendenti, dove la probabilità
di successo è p per ogni esperimento.
Questa definizione è proprio quella di distribuzione binomiale, pertanto la probabilità cercata è:
13
P( i alleli A ) = [ ( 2N )! / i! ( 2N – i )! ] pi q2N - i .
La media di una variabile binomiale ( i in questo caso ) è E( i ) = 2Np ( E sta per “expected” );
poiché nella generazione successiva la frequenza è p' = i / 2N, la frequenza attesa in questa nuova
generazione sarà:
E( p' ) = E( i / 2N ) = E( i ) / 2N = p ;
la frequenza media, quindi, non cambia. Allo stesso modo, la variazione media di p è tale che:
E( p' – p ) = E( i / 2N – p ) = E( i / 2N ) – p = 0 .
La varianza della variazione è data da:
var( p' – p ) = var( i / 2N – p ) = var( i ) / ( 2N )2 = p ( 1 – p ) / 2N
poiché la varianza della variabile binomiale i è 2Np ( 1 – p ). Si vede quindi che maggiore è la
dimensione della popolazione, minore è la dispersione delle frequenze alleliche attorno al loro
valore iniziale, come conseguenza del fatto che la grandezza del campione assorbe le fluttuazioni
casuali.
A questo punto, si introduce una nuova variabile, analoga alla quantità G, detta omozigosità della
popolazione, indicata con G e definita come:
G t = pt2+ qt2 = pt2+ ( 1 – pt )2 ;
il suo valore medio in una qualche generazione t + 1 è:
E( Gt+1 ) = E( p2t+1 ) + E( q2t+1 ) = var( pt+1 ) + [ E( pt+1 ) ]2 + var( qt+1 ) + [ E( qt+1 ) ]2 = pt qt / 2N + pt2
+
pt qt / 2N + qt2 = 1 / 2N + ( 1 – 1 / 2N ) ( pt2 + qt2 ) = 1 / 2N + ( 1 – 1 / 2N ) Gt ,
dove si è tenuto presente che 2pq + p2 + q2 = 1.
14
Mediando sulla distribuzione di p alla generazione t, si ottiene una uguaglianza tra quantità non
random che è la stessa soddisfatta dalla G definita inizialmente; resta da trovare quindi la relazione
tra G e G: dalla definizione di omozigosità, si vede che questa rappresenta la probabilità di scegliere
consecutivamente due geni uguali dallo stesso set complessivo; questo evento si può verificare in
due modi: può accadere che venga scelto il medesimo ( fisicamente, oltre che dal punto di vista
della sequenza ) gene due volte di seguito, e ciò ha probabilità 1 / 2N, oppure possono essere due
geni diversi, ma uguali per stato, e ciò si verifica con probabilità ( 1 – 1 / 2N ) G. Si ottiene quindi
per una generica generazione, diciamo ad esempio quella iniziale, la relazione cercata:
G0 = 1 / 2N + ( 1 – 1 / 2N ) G0 ;
si vede quindi che G e G seguono la stessa equazione, ma differiscono per la condizione iniziale, in
modo meno evidente per popolazioni grandi, per le quali l'omozigosità infatti è una stima di G. Si
definisce eterozigosità la quantità:
H=1–G,
la cui evoluzione è data da:
Ht = H0( 1 – 1 / 2N )t ,
e poiché H0 = ( 1 – 1 / 2N ) H0 , si ha:
Ht = H0( 1 – 1 / 2N )t +1 .
E' dimostrato pertanto che le quantità H e G descrivono un comportamento medio di sistemi
caratterizzati dalle fluttuazioni casuali delle variabili binomiali p e q, delle quali è impossibile
prevedere l'evoluzione generazione dopo generazione, ma di cui è possibile invece dare la
probabilità delle varie “strade” che possono seguire, e quindi ricavarne dei valori di aspettazione.
15
Capitolo 2
Teoria di Darwin e pressione selettiva
Nella trattazione svolta fino a questo punto sono state prese in considerazione popolazioni in cui gli
alleli relativi ad un locus particolare sono del tutto equivalenti dal punto di vista della pressione
selettiva: tutte le mutazioni che compaiono nel modello precedente hanno la stessa probabilità di
sopravvivere degli individui già presenti. Consideriamo qui il caso in cui gli individui sono soggetti
alla selezione naturale. Poiché il concetto di selezione naturale, introdotto da Darwin, è esposto in
maniera massimamente chiara nella Introduzione della sua opera, “L'Origine della Specie”,
riportiamo il passo testualmente:
“Gli individui che nascono di ciascuna specie sono più numerosi di quanti ne possono
sopravvivere, e quindi la lotta per l'esistenza si ripete di frequente; ne consegue che qualsiasi
vivente, che sia variato seppure di poco, ma in senso a lui favorevole nell'ambito delle condizioni di
vita, che a loro volta sono complesse ed alquanto variabili, avrà maggiori possibilità di
sopravvivere e, quindi, sarà selezionato naturalmente. In virtù del possente principio
dell'ereditarietà, ciascuna varietà, selezionata in via naturale, tenderà a perpetuare la sua nuova
forma modificata.”
2.1 I parametri della selezione
Consideriamo una popolazione ermafrodita, il cui processo evolutivo è scandito da cicli consecutivi
di random mating e selezione. Se nella generazione iniziale è presente, in un certo locus, un allele (
non neutrale questa volta ) A con frequenza p, questo passerà alla generazione successiva di neonati
con una frequenza attesa sempre di valore p; le frequenze genotipiche saranno conformi alle
aspettazioni descritte dalla legge di Hardy – Weinberg, poiché l'accoppiamento è random, mentre i
neonati, nel loro percorso verso l'età adulta ( quando cioè sono in grado riprodursi ), saranno
soggetti alla selezione naturale. Questa nuova forza evolutiva è descritta da una probabilità di
sopravvivenza che dipenderà dal fenotipo, e quindi, ad un livello più profondo, dal genotipo.
Supponendo che gli alleli che segregano nel locus in questione siano due, A e a, assegniamo quindi
16
ai tre genotipi possibili AA, Aa e aa le quantità, che vengono definite “viabilità”, w AA , wAa e waa
rispettivamente; questi oggetti hanno lo scopo di quantificare l'effetto della selezione, in quanto,
dopo la sua azione, le frequenze x dei genotipi saranno variate secondo le le relazioni:
x( AA ) = p2 wAA / wm ,
x( Aa ) = 2p ( 1 – p ) wAa / wm , x( Aa ) = ( 1 – p )2 waa / wm ,
dove wm è una costante di normalizzazione, data da:
wm = p2 wAA + 2p ( 1 – p ) wAa + ( 1 – p )2 waa ,
e rappresenta la viabilità media della popolazione.
Insieme con le frequenze genotipiche, cambiano anche le frequenze alleliche; pertanto, dopo la
selezione, ci sarà una nuova frequenza p' data da:
p' = ( p2 wAA + pq waa ) / wm ,
da cui si ottiene la variazione Δsp in frequenza:
Δsp = pq [ p( wAA – wAa ) + q( wAa – waa ) ] / wm .
Dividendo le varie viabilità per wAA ( o equivalentemente per waa ), è possibile definire delle
viabilità relative che per i tre genotipi sono rispettivamente 1, wAa / wAA e waa / wAA . Ciascuna di
queste quantità la indichiamo con il nome di fitness relativo, ognuno riferito al suo genotipo.
Riscriviamo le ultime due nel seguente modo:
wAa / wAA = 1 – hs
waa / wAA = 1 – s ;
il parametro s è chiamato coefficiente di selezione, ed è una misura del fitness relativo tra i genotipi
aa e AA: se s è positivo, aa è meno vantaggioso di AA, mentre se s è negativo, è vero il contrario.
Supponendo, senza perdere di generalità, che AA è più vantaggioso, si può porre 0 < s < 1. Il
parametro h tiene conto del cosiddetto effetto eterozigote, e rappresenta una misura della dominanza
degli alleli a e A. Si possono avere le seguenti situazioni:
h=0:
A dominante
h=1:
A recessivo
17
0<h<1:
dominanza incompleta
h<0:
sovradominanza
h>1:
sottodominanza .
I primi due casi si presentano raramente nelle popolazioni reali, mentre gli altri tre sono di maggiore
interesse per l'evoluzione. Il caso h = ½ rappresenta la situazione di un eterozigote esattamente a
metà tra i due omozigoti per la selezione. Con questi nuovi parametri, l'espressione di Δsp può
essere riscritta come:
Δsp = pqs [ ph + q( 1 – h )] / wm
wm = 1 – 2pqsh – sq2 .
Supponendo che s > 0, il segno di Δsp è determinato dalla quantità ph + q( 1 – h ), che verrà
analizzata nel seguente paragrafo.
2.2 I tre tipi di selezione
La selezione in generale può essere di due tipi: positiva o negativa. La prima interviene quando un
gene mutante aumenta il fitness degli individui che ne sono portatori, favorendone la diffusione
nella popolazione, mentre la seconda interviene se il gene mutante diminuisce il fitness e tende ad
essere eliminato.
Poiché la selezione agisce primariamente sul fenotipo, l'evoluzione del genotipo è determinata dagli
effetti della pressione selettiva sui fenotipi. Conviene pertanto considerare la selezione su questi due
livelli separatamente. Per quanto riguarda la selezione fenotipica, questa si suddivide in tre tipi:
stabilizzante, direzionale, distruttiva.
Consideriamo un generico carattere ( ad esempio l'altezza ) e consideriamo la distribuzione dei suoi
valori nella popolazione; supponiamo che questa distribuzione segua l'andamento di una
distribuzione normale. Si dice che c'è selezione stabilizzante quando l'optimum del fitness si ha per
valori del carattere vicino alla media della distribuzione. Gli individui che hanno una misura
maggiore o minore di quella media sono selezionati negativamente. In pratica, essa taglia fuori gli
estremi. Per questo motivo tale selezione è anche definita centripeta o normalizzante.
L'altro tipo di selezione è quella direzionale, e si manifesta quando l'optimum fenotipico è spostato
rispetto alla media dei valori del carattere considerato, con l'effetto di “direzionare” i valori dei
fenotipi verso l'optimum; in questo tipo di selezione Darwin individua la causa fondamentale
18
dell'evoluzione. Il terzo tipo di selezione, quella distruttiva, interviene quando esistono due o più
optima dei fenotipi, e rappresenta la situazione opposta alla selezione stabilizzante.
Per quantificare l'effetto della selezione sulla genetica della popolazione, è necessario andare oltre i
fenotipi ed assegnare direttamente ai genotipi i valori dei fitness, come è stato fatto all'inizio del
capitolo. I tre tipi di selezione fenotipica possono quindi essere ricondotti ai casi elencati per i vari
valori di h.
Il caso della selezione stabilizzante corrisponde al caso di overdominanza, caratterizzato da h < 0,
in cui l'eterozigote è più vantaggioso dei due omozigoti. In questo caso, supponendo s > 0, si vede
dall'espressione di Δsp che quando p ( frequenza dell'allele A ) è vicino allo zero, l'incremento è
positivo, e la frequenza allelica aumenta, mentre se p è vicino all'unità, l'incremento è negativo e p
diminuisce, in un meccanismo di feedback negativo. In altre parole, p tende ad un valore di
equilibrio pe, diverso da zero e da 1, che si ricava ponendo Δsp = 0. Si ottiene in tal modo:
pe = ( h – 1 ) / ( 2h – 1 ) .
Se si verifica una deviazione dalla frequenza pe , positiva o negativa, il sistema reagisce in modo da
riportarsi all'equilibrio: si tratta quindi di un equilibrio stabile.
La selezione direzionale è invece ricondotta al caso relativo alla dominanza incompleta ( 0 < h < 1
), in cui il fitness del genotipo AA è maggiore di quello di Aa, che a sua volta è maggiore del
fitness di aa. L'incremento di p in questo caso è positivo qualunque sia il suo valore iniziale; in tal
modo, l'allele A tende a fissarsi sempre nella popolazione; la velocità di questo processo dipende
invece dal valore iniziale di p, e raggiunge il suo massimo per p = ½, cioè quando c'è il massimo
della varietà genetica, mentre quando p è molto piccolo o quando è quasi 1, ovvero quando c'è poca
varietà, Δsp è quasi nullo. La situazione p = 0 rappresenta un equilibrio instabile, mentre p = 1 è un
equilibrio stabile.
La selezione distruttiva si ha quando c'è underdominanza, cioè per h > 1, dove l'eterozigote ha un
fitness minore di entrambi gli omozigoti. Questo caso è opposto a quello della selezione
stabilizzante, come detto in precedenza: infatti l'incremento di p è negativo se il suo valore è minore
di pe, tendendo quindi a zero, mentre è positivo se p è maggiore di pe, tendendo ad 1 in questo caso.
Quando p = pe, le frequenze alleliche non cambiano; si tratta comunque di un equilibrio altamente
instabile, in cui anche la più piccola variazione di p causa un cambiamento radicale del sistema. La
variazione di p può essere causata facilmente dal drift.
19
2.3 Equilibrio selezione-mutazione e interazione selezione-drift
Consideriamo una popolazione diploide soggetta al random mating. Supponiamo che in locus
segreghino due alleli A1 e A2 , dove A2 risulta dalla mutazione di A1 ed è deleterio per l'individuo
che ne è portatore. Se assumiamo che il rapporto tra i due alleli sia di dominanza incompleta, la
selezione sarà allora di tipo direzionale, e tenderà ad eliminare dalla popolazione l'allele A 2, che
però continua a comparire a causa di nuove mutazioni dell'allele A1. L'effetto delle mutazioni sulla
frequenza p dell'allele A1 è rappresentato da una sua variazione Δup rispetto alla generazione
successiva, ed è data da:
Δup = p ( 1 – u ) – p = – up ,
dove u è il tasso di mutazioni, per cui ( 1 – u ) è la probabilità che non avvengano mutazioni. Se la
selezione è sufficientemente intensa da mantenere la frequenza dei mutanti A2, q = 1 – p, molto
piccola, si ha:
Δup = – u ( 1 – q ) = – u + qu ≈ – u ,
mentre la variazione Δsp dovuta esclusivamente alla selezione, ricavata in precedenza, si riduce,
con queste ipotesi, alla quantità:
Δsp = pqs [ ph + q( 1 – h ) ] / wm ≈ qhs .
All'equilibrio, la somma delle due variazioni deve essere zero, e questo fornisce l'espressione di qe:
qe = u / hs .
Questa relazione è in accordo con l'osservazione sperimentale secondo cui gli alleli rari sono più
comuni in eterozigoti piuttosto che in omozigoti, e quindi è ragionevole aspettarsi che la frequenza
di tali alleli dipenda dal fitness dell'eterozigote hs.
Per quantificare l'intensità della selezione, si introduce una quantità L, detta carico genetico,
definita dalla relazione:
20
L = ( wop – wm ) / wop ,
dove wop è il fitness del genotipo più vantaggioso. Il fitness medio wm per una popolazione
all'equilibrio selezione – mutazione è:
wm = 1 – 2peqehs – qe2 s ≈ 1 – 2qehs = 1 – 2u ,
quindi la presenza dell'allele A2 deleterio diminuisce il fitness medio di una quantità 2u. Il carico
genetico, in questo caso, vale pertanto 2u, poiché wop = 1 .
Consideriamo adesso l'azione del drift su una popolazione soggetta alla selezione naturale.
Dal modello teorico sulla selezione direzionale, risulta che l'allele più vantaggioso raggiunge
sempre fissazione. In realtà questo è vero per alleli con frequenza non troppo piccola, ma non lo è
per alleli unici o aventi poche copie nella popolazione, e ciò accade a causa del drift. La selezione
infatti diventa debole per gli alleli rari, poiché Δsp contiene p come fattore: ad esempio, se
p = 1 / 2N, la forza della selezione è proporzionale al prodotto s / 2N, ed è quindi minore
dell'effetto del drift che è proporzionale a 1 / 2N. Se la frequenza dell'allele diventa più consistente,
allora l'intensità della selezione dipende dal coefficiente s: se s >> 1 / 2N, allora la selezione
domina sul drift e condiziona fortemente il destino degli alleli più comuni.
In generale pertanto, quando compare in una popolazione di dimensione finita, a causa di una
mutazione, un nuovo allele più vantaggioso rispetto agli altri, questo sarà perduto a causa del drift.
Questo è possibile dimostrarlo utilizzando la formula per la probabilità P( p ) di fissazione di un
allele soggetto alla selezione assegnata la sua frequenza iniziale p quando h = ½ ( questo
interessantissimo risultato è dimostrato in APPENDICE A.2 ):
P( p ) = ( 1 – exp[ – 2Nsp ] ) / ( 1 – exp[ – 2Ns ] ) .
Infatti, per p = 1 / 2N, la probabilità vale:
P( 1 / 2N ) = ( 1 – exp[ – s ] ) / ( 1 – exp[ – 2Ns ] ) ,
la quale, se s è abbastanza piccolo e 2Ns abbastanza grande, si riduce all'espressione:
P( 1 / 2N ) ≈ s .
21
Poiché nel caso considerato il vantaggio selettivo per l'eterozigote vale s / 2 ( hs con h = ½ ), si può
interpretare la probabilità di fissazione degli alleli rari come una funzione di questa quantità, il che
è in accordo con l'osservazione sperimentale di alleli rari collocati principalmente in eterozigoti.
Ad esempio, se il vantaggio selettivo di una mutazione è l' 1% nell'eterozigote ( tutt'altro che
trascurabile in popolazioni grandi ), allora la probabilità di fissazione di questo allele è soltanto del
2%.
La formula sopra utilizzata consente anche di calcolare la probabilità di fissazione di un allele
deleterio. Supponendo che│s│sia piccolo, poiché questa volta s è negativo, questa probabilità è
data da:
P ( 1/2N ) ≈ s / ( 1 – exp[ – 2Ns ] ) ,
e diventa molto piccola se │2Ns│ >> 1, ma più consistente se │2Ns│ ≈ 1.
Osserviamo che l'espressione della probabilità di fissazione ha un valore generale: essa infatti, oltre
a fornire informazioni su alleli selezionati, fornisce anche la probabilità di fissazione di alleli
neutrali, ottenuta facendo tendere a zero il coefficiente di selezione s e valutando questo limite per
la funzione P. Ovviamente, il risultato è 1 / 2N, come già anticipato nel paragrafo 1.1. Definendo
quindi P0 questo valore, è interessante considerare il rapporto P / P0 per alleli debolmente
selezionati:
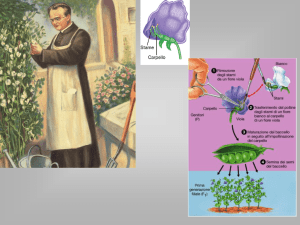
P / P0 = 2Ns / ( 1 – exp[ – 2Ns ] ) ,
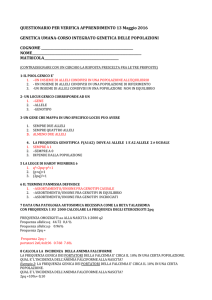
rappresentato graficamente in FIGURA 3. Come si nota, per valori negativi di s, ovvero per alleli
deleteri, la probabilità di fissazione di alleli neutrali è maggiore, mentre per valori di s positivi, e
quindi per alleli vantaggiosi, la probabilità di fissazione è maggiore; per s = 0, l'allele è neutrale,
dunque il rapporto vale 1.
22
FIGURA 3: Andamento di P / P0 per alleli debolmente selezionati
Queste espressioni sono utilizzabili per calcolare il tasso di sostituzione ks di alleli soggetti a
selezione, analogamente a quanto fatto nell'ambito della teoria neutrale: in quel caso, questa
quantità è stata ricavata come prodotto del numero medio di mutazioni che subentrano in ogni
generazione, 2Nu, per la loro probabilità di fissazione, 1 / 2N; nella circostanza della selezione, il
tasso ks si deriva allo stesso modo, con la differente espressione per la probabilità di fissazione. Si
ha pertanto:
ks = 2NuP( 1 / 2N ) = 2Nu ( 1 – exp[ – s ] ) / ( 1 – exp[ – 2Ns ] ) ,
e da questa, utilizzando la formula approssimata per P( 1 / 2N ), si ottiene:
ks = 2Nus .
Questo risultato era già stato anticipato nel capitolo precedente: il tasso di sostituzione di alleli non
neutrali dipende da quantità specifiche, variabili da popolazione a popolazione, come lo sono la
dimensione N, il coefficiente di selezione s e il tasso di mutazione di alleli vantaggiosi u. Ciò
implica che ks dipende fortemente dall'ambiente ( poiché vi dipende s ), e dalla specie ( poiché vi
dipende u ), in contrasto con la costanza ( approssimativa ) del tasso di sostituzione, per una data
proteina, di alleli neutrali.
Come conseguenza di tutti questi risultati sull'interazione selezione - drift, supponiamo che ci siano
dei cambiamenti ambientali e che intervengano delle mutazioni in vari loci tali da consentire
l'adattamento al nuovo ambiente. La prima di queste mutazioni che si fissa, determina un percorso
evolutivo della popolazione; poiché però l'allele che si fissa per primo è fondamentalmente casuale,
l'evoluzione adattativa che ne risulta è anch'essa casuale. In altre parole, l'evoluzione è un processo
irripetibile.
23
2.4 Ambiente e migrazione
Si è visto che la selezione stabilizzante ha luogo quando c'è overdominanza, cioè quando h < 0 e
l'eterozigote è più vantaggioso di entrambi gli omozigoti. E' possibile tuttavia che si verifichi una
selezione di questo tipo senza che h < 0, e ciò avviene a causa dei cambiamenti ambientali, ignorati
nei modelli proposti fino a questo punto. Immaginiamo quindi una popolazione diploide e un locus
in cui segregano due alleli A1 e A2, in una situazione di dominanza incompleta. Supponiamo inoltre
che questa si sviluppi in un ambiente vario, in cui alcuni genotipi sono favoriti in certe regioni, e
altri genotipi sono favoriti in regioni diverse dalle precedenti. In altre parole, stiamo supponendo
che i fitness dipendono dallo spazio.
Una immediata applicazione del modello appena descritto è rappresentata da un ambiente diviso in
due zone, laddove nella prima è favorito l'allele A1, nella seconda l'allele A2. Se non si verificano
fenomeni di migrazione, allora l'allele A1 si fisserà nella prima zona e l'allele A2 si fisserà nella
seconda: la specie complessivamente sarà polimorfica nel locus in questione, senza che h < 0.
Naturalmente le popolazioni reali sono soggette alle migrazioni; di queste se ne deve tener conto nel
nostro modello. Consideriamo allora un ambiente suddiviso in n regioni, ognuna caratterizzata da
una dimensione relativa ci. Ad ogni generazione, dopo la selezione all'interno di ciascuna zona, una
frazione m di geni presi a caso dalle rispettive subpopolazioni sono scambiati con geni di altre
subpopolazioni; lo scambio con geni appartenenti ad una particolare zone avviene con una
probabilità proporzionale al coefficiente c di quella regione. Ad ogni zona, corrisponde un diverso
fitness relativo ai tre genotipi. La frequenza pi' dell'allele A1 nell'i-esima zona dopo la selezione e la
migrazione è data da:
pi' = ( 1 – m ) ( pi + Δspi ) + m Σjcj ( pj + Δspj )
dove Δspi è la variazione di pi in ogni zona dovuta alla selezione locale. L'espressione discende dal
fatto che un allele A1 può essere autoctono ( probabilità ( 1 – m ) ) o provenire da un'altra zona (
probabilità m ), nel qual caso la probabilità di essere A1 è la frequenza di A1 su tutta la popolazione
dopo la selezione.
Consideriamo a questo punto due casi notevoli: m = 0, cioè nessun flusso migratorio, e m = 1, cioè
migrazione totale; in entrambi i casi, si suppone 0 < h < 1.
Quando m = 0, l'allele favorevole nella zona i-esima si fissa, per cui la frequenza pi sarà 0 oppure 1.
La frequenza complessiva è data dalla media pesata delle varie frequenze:
24
p = Σicipi ;
quando in almeno una delle zone sarà fissato A2 e nelle altre A1, o viceversa, ci sarà polimorfismo
nella specie senza l'occorrenza della overdominanza.
Consideriamo ora il caso più complesso m = 1. La frequenza totale p, dopo selezione e migrazione,
sarà data dall'espressione:
p' = Σicipi' = ( 1 – m ) Σici ( pi + Δspi ) + m ΣiciΣjcj ( pj + Δspj ) =
Σicipi + ΣiciΔspi =
p + ( Δsp )m ,
dove ( Δsp )m rappresenta la media pesata delle variazioni sulle n zone. Da qui si ottiene:
Δsp = ( Δsp )m ,
ovvero la variazione di p nell'intera popolazione è uguale alla variazione media tra le varie
subpopolazioni. Poiché m = 1, le frequenze alleliche in ogni zona sono le stesse all'inizio di ogni
ciclo di selezione, come discende dall'espressione di pi'. Posto quindi pi = p, risulta:
Δsp = pq Σici [ p( wiA1A1 – wiA1A2 ) + q( wiA1A2 – wiA2A2 ) ] / wim .
Supponiamo adesso h = ½, e poniamo wiA1A1 = 1 + si, wiA2A2 = 1 – si, wiA1A2 = 1; con queste
posizioni, l'espressione precedente diventa:
Δsp = pq Σi ( cisi ) / ( 1 + si ( p – q ) ) .
Per verificare la possibilità di polimorfismo in questo caso, che è di dominanza incompleta, si studia
Δsp quando p e q sono prossimi a zero. Nel primo caso, poiché p ≈ 0 e q ≈ 1, risulta che il segno
dell'incremento dipende dalla quantità:
Σi( cisi ) / ( 1 – si ) ≈ Σici( si + si2 ) ;
affinché Δsp > 0, deve essere Σici( si + si2 ) > 0, pertanto:
25
– Σicisi < Σici si2 .
Allo stesso modo, quando q è in prossimità dello zero e p ≈ 1, affinché Δsp < 0, deve essere:
Σicisi < Σici si2 .
In generale quindi, condizione sufficiente per il polimorfismo è:
│Σicisi│< Σici si2 ,
da cui, considerando le quantità si variabili random, si ottiene la relazione approssimata:
│E( si )│< Var( si ) ;
tale disuguaglianza implica che il polimorfismo è tanto più probabile quanto più vario è l'ambiente.
Questa relazione inoltre può essere soddisfatta solo se alcune si sono positive e altre negative; tale
condizione, necessaria sia quando m = 0 sia quando m = 1, è anche sufficiente nel caso m = 0 ma
non lo è per m = 1. Questo avviene poiché la migrazione, quando c'è dominanza incompleta,
favorisce il polimorfismo in misura minore a causa dell'effetto di mediazione sulle numerose
fluttuazioni ambientali che mantengono la varietà.
26
Capitolo 3
Un modello di evoluzione
Diamo qui la descrizione di un modello dinamico elaborato come programma informatico. Il
modello descrive l'evoluzione di una popolazione diploide di tipo Wright - Fisher costituita da un
numero N di individui, nella quale è presente un carattere poligenico il cui fenotipo dipende da geni
situati su un numero g di loci, che abbiamo fissato a cinque. In ogni locus segregano due alleli,
chiamati 1 e 2. Il programma è strutturato in maniera tale da gestire l'evoluzione della popolazione
in due modi: questa può essere soggetta soltanto al drift genetico, per cui gli alleli sono neutrali e
tutti i fenotipi sono equivalenti, oppure può essere sottoposta all'azione della selezione naturale
stabilizzante. In questo secondo caso, si rende necessaria l'introduzione del fitness di ciascun
individuo, che è definito nel seguente modo: per ognuno dei genotipi relativi ai cinque loci, che
sono ( 1, 1 ), ( 1, 2 ) e ( 2, 2 ), abbiamo assegnato un numero intero m che vale 0, 1 o 2
rispettivamente; il valore fenotipico M del carattere è dato quindi dalla somma degli m sui vari loci,
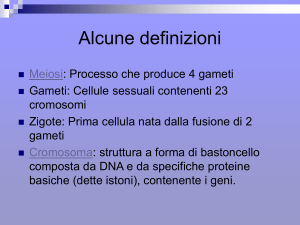
e può assumere, nel nostro caso, tutti i valori interi compresi fra 0 e 10. L'optimum fenotipico μ è
fissato a 5. Come curva del fitness è stata considerata una gaussiana F( M, μ ) di altezza massima 1,
centrata su μ ( FIGURA 4 ). L'azione della selezione si esplica attraverso l'estrazione di un numero
casuale y compreso tra zero e 1 che viene confrontato con F( M, μ ): se y < F( M, μ ), l'individuo
sopravvive, viceversa viene sostituito con un altro individuo generato in maniera casuale, e avente
pertanto un valore fenotipico in generale diverso dall'individuo soppresso dalla selezione. Viene
mantenuta in tal modo costante la dimensione della popolazione.
27
FIGURA 4: Curva del fitness ( in blu ) con S = 1 e distribuzione del valore fenotipico M ( in rosso )
Con la struttura appena proposta, l'effetto della selezione è quello di far evolvere la specie verso
l'optimum, che tuttavia non è geneticamente unico, ma può essere realizzato con diverse
combinazioni di genotipi, in modo da mantenere il polimorfismo. L'intensità della selezione viene
controllata attraverso un parametro S, che rappresenta la varianza della curva del fitness: minore è
S, più stretta è la gaussiana e quindi è più intensa la selezione.
Dal punto di vista dell'implementazione informatica, la popolazione è organizzata come una matrice
avente 2N righe, che rappresentano i “cromosomi”, e g colonne, che individuano i loci. Con questo
formalismo, un individuo è rappresentato da una coppia ( la specie è diploide ) di righe ( possiamo
dire il suo genoma ) consecutive. La popolazione iniziale è generata in maniera random assegnando
arbitrariamente le frequenze { pi } dell'allele 1 per ognuno dei vari locus, e questo viene fatto
tramite l'introduzione di un array di g oggetti. Generata la popolazione iniziale, questa viene fatta
evolvere ( con o senza selezione ), per un numero T più o meno grande di generazioni; il
programma mostra le frequenze alleliche { pi }, le frequenze genotipiche e le eterozigosità dei vari
loci durante il susseguirsi delle generazioni. Nel seguito sono presentati gli output di alcune
simulazioni eseguite con il programma appena descritto.
Plot 1:
28
N = 100
Eterozigosità
Il grafico mostra l'andamento delle frequenze alleliche p relative all'allele 1, in una popolazione di
100 individui soggetti esclusivamente al random drift, tutti con una frequenza iniziale di 0.5. Si
notano le forti oscillazioni dovute alla dimensione ridotta del campione, che in pratica esaurisce
l'evoluzione dopo 50 generazioni poiché in 3 dei 5 loci l'allele di tipo 1 raggiunge fissazione, mentre
negli altri due si fissa l'allele di tipo 2. L'eterozigosità ( a destra è rappresentata quella del locus
arancione ) di tutti i loci decade quindi a 0, secondo le previsioni del modello del drift.
Plot 2:
N = 1000
N = 10000
Anche questi grafici mostrano le frequenze p, e le condizioni iniziali sono le stesse del caso
precedente, ma sono riferite a popolazioni costituite da 1000 ( a sinistra ) e 10000 individui ( a
destra ). Si nota che al crescere di N le oscillazioni random delle frequenze diventano molto più
addolcite, poiché le fluttuazioni sono assorbite dalla grandezza del campione. Si evidenzia inoltre
29
una evoluzione più lenta, poiché nessuno degli alleli raggiunge fissazione dopo 100 generazioni in
entrambi i casi, anche se si intravede la tendenza alla fissazione o alla rimozione nel caso N = 1000,
mentre nel secondo gli andamenti si mantengono circa costanti, poiché rappresenta, essendo N
grande, una approssimazione di una popolazione di Hardy – Weinberg.
Le seguenti simulazioni riguardano l'evoluzione di un carattere che dipende da 10 geni, di cui 5
sono soggetti a selezione, mentre gli altri sono neutrali. In questo modo, è possibile confrontare
direttamente gli andamenti delle frequenze di alleli selezionati e di alleli non selezionati.
Plot 3:
Nei grafici di questa simulazione ( in alto nella pagina seguente ), gli andamenti delle frequenze
degli alleli soggetti alla selezione sono rappresentati in arancione, mentre gli alleli neutrali sono
rappresentati in blu. E' evidente che la selezione è la forza evolutiva più importante per la
popolazione con N maggiore, dove il drift è più blando poiché 1 / 2N è piccolo. Come si nota, le
frequenze arancioni evolvono in maniera tale da conferire agli individui un valore fenotipico vicino
o uguale all'optimum che è fissato a 5. E' interessante notare che l'optimum è raggiunto in modo da
favorire gli omozigoti, eccetto per uno solo dei cinque loci, dove la frequenza si mantiene attorno a
N = 1000
N = 10000
0.5. Il fatto che si ritrovano nella popolazione solo omozigoti per quattro dei cinque loci è dovuto
alla maggiore probabilità con cui si raggiunge in tal modo l'optimum fenotipico, rispetto ad una
situazione di tutti eterozigoti sui cinque loci, che è fenotipicamente equivalente, ma non lo è sul
piano della statistica. La selezione, in questo senso, induce una rottura della simmetria genotipica
nella popolazione.
30
Plot 4:
Popolazione 1
Popolazione 2
Questa simulazione confronta l'evoluzione di due popolazioni aventi 2000 individui ciascuna, e
soggette alla stessa pressione selettiva. In arancione e in blu sono, come prima, sono rappresentate
rispettivamente le frequenze di alleli selezionati e di alleli neutrali. Per seguire l'evoluzione di
singoli locus, abbiamo reso distinguibili due di questi indicando con il rosso la frequenza di uno
degli alleli selezionati, e in verde quella di un allele neutrale. Si nota subito che nella prima
popolazione il rosso ( indichiamo così l'allele per semplicità ) si fissa, mentre nella seconda
popolazione è rimosso: sebbene i due sistemi partano dalle stesse condizioni iniziali e siano
soggetti alla stessa selezione, questi evolvono in maniera del tutto diversa. L'evoluzione non si
ripete.
Conviene introdurre a questo punto il parametro FST, che rappresenta una misura della
differenziazione genetica tra popolazioni: se questo è piccolo, allora esse sono simili, mentre un
valore più consistente con l'unità implica una maggiore diversità; la stima di questa quantità relativa
alle frequenze dell'allele rosso e dell'allele verde è riportata in funzione del tempo nel seguente
grafico:
31
Le popolazioni sono simili se consideriamo l'allele verde ( di cui si intravede l'andamento per t
molto grande ), mentre sono geneticamente diverse per il locus in cui segrega l'allele rosso,
testimoniando l'unicità dei percorsi evolutivi seguiti.
Appendice
A.1 La legge di Hardy – Weinberg
Nella Introduzione, è stata citata la legge di Hardy – Weinberg come esempio di applicazione di
ipotesi semplici per descrivere un sistema complesso come una popolazione. In particolare abbiamo
considerato la distinzione tra popolazione ermafrodita e sessuata, affermando nel primo caso che
l'equilibrio è raggiunto dopo una generazione, mentre nel secondo caso è raggiunto dopo due
generazioni. Giustifichiamo qui il risultato.
Consideriamo una popolazione ermafrodita di infiniti individui e supponiamo che la frequenza
dell'allele A1 sia p ( quindi q = 1 – p è la frequenza di A2 ); assumiamo un regime di random
mating, e consideriamo la riproduzione degli individui. La probabilità che lo spermatozoo sia A1 è
32
p, mentre la probabilità che la cellula uovo sia A1 è anch'essa p, e quindi la probabilità di avere uno
zigote A1A1 è p2; in modo analogo si ottiene che la probabilità di uno zigote A2A2 è q2. La
probabilità che lo zigote sia invece A1A2 è data dalla somma delle probabilità che l'uovo sia A1 e lo
spermatozoo sia A2, ed è pq, oppure che l'uovo sia A2 e lo spermatozoo A1, anch'essa pq, fornendo
complessivamente 2pq. L'equilibrio pertanto è raggiunto dopo una sola generazione.
Per quanto riguarda il caso di popolazione sessuata, nella prima generazione le frequenze
genotipiche dipendono dal sesso: indichiamo quindi x( AiAj ) quelle relative ai maschi e y( AiAj )
quelle relative alle femmine. In un ciclo di random mating, possiamo avere nove coppie di genotipi
che si uniscono, e per ognuna si possono avere uno, due o tre possibili genotipi per i figli. Se si
accoppiano due omozigoti uguali, allora i figli sono di certo omozigoti; se si accoppiano un
omozigote e un eterozigote allora i figli potranno essere sia omozigoti ( dello stesso tipo del
genitore ), sia eterozigoti, ed entrambi gli eventi hanno ½ come probabilità di successo; se si
accoppiano due eterozigoti, allora i figli potranno essere omozigoti di entrambi i tipi con probabilità
¼ ciascuno, oppure eterozigoti con probabilità ½; se poi si accoppiano due omozigoti diversi, i figli
saranno di certo eterozigoti. Tutto ciò è riassunto in tabella nella pagina seguente.
A questo punto, la frequenza genotipica x'( A1A1 ), nella nuova generazione, è:
x'( A1A1 ) = y( A1A1 ) x( A1A1 ) + ( y( A1A1 ) x( A1A2 ) ) / 2 + ( y( A1A2 ) x( A1A1 ) ) / 2 +
( y( A1A2) x( A1A2) ) / 4 = ( x( A1A1) + x( A1 A2 ) / 2 ) ( y( A1A1) + y( A1A2 ) / 2 ) = pm pf
Tipo di coppia
Frequenza di
accoppiamento
Probabilità dei genotipi per i
figli nella seconda generazione
Femmine
maschi
A1A1
A1A1
y(A1A1) x(A1A1) 1
A1A1
A1 A2
y(A1A1) x(A1A2) ½
½
A1A1
A2A2
y(A1A1) x(A2A2)
1
A1 A2
A1A1
y(A1A2) x(A1A1) ½
½
A1 A2
A1 A2
y(A1A2) x(A1A2) ¼
½
¼
A1 A2
A2A2
y(A1 A2) x(A2A2)
½
½
A2A2
A1A1
y( A2A2) x(A1A1)
1
A2A2
A1 A2
y( A2A2) x(A1A2)
½
A2A2
A2A2
y( A2A2) x(A2A2)
A1A1
A1 A2
A2A2
½
1
Tabella riassuntiva dei possibili accoppiamenti
33
dove pm e pf sono le frequenze alleliche dell'allele A1 nei maschi e nelle femmine.
Analogamente si ottiene per il genotipo A2A2 la frequenza qm qf, mentre per A1A2 si ricava:
x'( A1A2 ) = y( A1A1 ) x( A2A2) + y( A2A2 ) x( A1A1 ) + ( y( A1A1 ) x( A1A2) ) / 2 +
+ ( y( A1 A2) x( A1A1) ) /2 + ( y( A1A2 ) x( A1A2 ) ) / 2 + ( y( A1 A2) x( A2A2) ) / 2 +
+ ( y( A2A2 ) x(A1 A2) ) / 2 = pmqf + pfqm .
Le quantità calcolate sono le stesse sia per i maschi sia per le femmine, poiché il locus in questione
non dipende dal sesso. La frequenza dell'allele A1 è quindi:
p' = x'( A1A1 ) + x'( A1 A2 ) / 2 = pm pf + ( pmqf + pfqm ) / 2 = ( pm + pf ) / 2 ,
uguale per entrambi i sessi; siamo quindi in una situazione intermedia dove non c'è ancora
l'equilibrio di Hardy – Weinberg, ma le frequenze alleliche sono diventate uguali per entrambi i
sessi, come nella popolazione ermafrodita alla prima generazione. Pertanto, dopo un altro random
mating, pervenendo così alla terza generazione, le probabilità di ottenere i vari genotipi hanno la
stessa forma di quelle discusse nel primo caso, e sono ( p' )2, ( q' )2 e 2p'q'. L'equilibrio di Hardy –
Weinberg è raggiunto in due generazioni.
A.2 Dimostrazione sulla probabilità di fissazione
Nel paragrafo 2.3 si è fatto uso dell'espressione P( p ) della probabilità di fissazione di un allele A
soggetto alla selezione assegnata la sua frequenza iniziale e in condizioni di dominanza incompleta
con h = ½. Diamo qui la dimostrazione di questo risultato.
Il punto di partenza è una decomposizione integrale della funzione P, che consente di esprimerla
nella forma:
P( p ) = ∫ f( p, p + δp )P( p, p + δp ) d( δp ) ,
dove f( p, p + δp ) è la densità di probabilità di una variazione δp nella frequenza allelica p nella
generazione successiva e l'integrazione è svolta su tutti i possibili valori di δp ( si suppone che la
popolazione sia grande abbastanza da poter considerare la variabile p continua ).
34
A questo punto si sviluppa al secondo ordine la probabilità di fissazione P( p, p + δp ) nella
generazione successiva e si pone:
∫ f( p, p + δp ) δp d( δp ) = E( δp│p ) = M( p ) ,
∫ f( p, p + δp ) ( δp )2 d( δp ) ≈ var( δp│p ) = V( p );
sostituendo queste quantità nell'espressione precedente e sottraendo P( p ) ad ambo i membri si
ottiene l'equazione differenziale:
(V( p ) / 2) P''( p ) + M( p ) P'( p ) = 0 ,
con le condizioni al contorno:
P( 0 ) = 0 , P( 1 ) = 1.
La soluzione generale di questa equazione è:
p
P( p ) =
G x
0
x
1
G x
x
0
,
dove G( x ) è:
G( x ) = exp[ – ∫ [ 2M( x ) / V( x ) ]dx ]
Occorre comunque dare le espressioni esplicite di M( p ) e V( p ) per specializzare la soluzione, e
queste dipendono dal tipo di situazione che si considera. La più semplice è quella dove l'allele A è
caratterizzato da un coefficiente s ed è tale che l'eterozigote ha vantaggio selettivo s, mentre
l'omozigote ha vantaggio 2s; si ha quindi:
M( p ) = pqs , V( p ) = pq ( 1 / 2N ) ,
che forniscono:
35
G( x ) = exp[ – 4Nsx ] ,
da cui si ottiene la soluzione:
P( p ) = ( 1 – exp[ – 4Nsp ] ) / ( 1 – exp[ – 4Ns ]) .
Più in generale, tenendo conto dell'effetto eterozigote attraverso il parametro h definito in
precedenza, si ha:
M( p ) = pqs ( h + ( 1 – 2h ) p ) , V( p ) = pq ( 1 / 2N ) ,
e quindi:
G( x ) = exp[ – ( 4Nshx + 2Ns ( 1 – 2h ) x2 )] = exp[ – ( 4Nshx – 2Nsx + 2Nsx + 2Nsx2
– 4Nshx2 ) ] = exp[ – ( 2Nsx ( 2h – 1 ) ( 1 – x ) + 2Nsx ) ] ,
che, per h = ½, diventa:
G( x ) = exp[ – 2Nsx ] ;
la soluzione con questa condizione è:
P( p ) = ( 1 – exp[ – 2Nsp ] ) / ( 1 – exp[ –2Ns ]) .
Questa è l'espressione utilizzata nel paragrafo 2.3, dimostrata con la cosiddetta teoria della
diffusione.
36
Bibliografia
John H. Gillespie, 1998. Population Genetics. The Johns Hopkins University Press.
Motoo Kimura, 1983. The neutral teory of molecular evolution. Cambrige University Press.
Motoo Kimura, 1962. On the probability of fixation of mutant genes in a population. Genetics.
B. S. Weir and C. Clark Cockerham, 1984. Estimating F-statistics for the analysis of population
structure. Evolution.
David T. Suzuki and Anthony J. F. Griffiths, 1980. Genetica, principi di analisi formale. Zanichelli.
37
38