Per tutti
i fulmini...
Elettrotecnica!
Volume 1
Fabio
Panozzo
Al lettore
La realizzazione di un libro comporta costi variabili (carta, stampa, legatura) e costi fissi, cioè indipendenti
dal numero di copie stampate (traduzione, preparazione degli originali, redazione, composizione, impaginazione).
I fotocopiatori possono contenere il prezzo perché, oltre a non pagare i diritti d’autore, non hanno costi fissi.
Ogni fotocopia, d’altra parte, riducendo il numero di copie vendute dall’editore, aumenta l’incidenza dei costi
fissi a copia e costringe l’editore ad aumentare il prezzo; questo, naturalmente, fornisce un ulteriore incentivo
a fotocopiare. Se questo circolo vizioso non verrà spezzato, arriveremo al punto in cui gli editori non avranno
più convenienza economica a realizzare libri di testo scolastici.
In quel momento non ci saranno più neppure fotocopie
L’editore
All’editore
La diffusione del sapere e dell’informazione comporta numerosi costi personali (tempo dedicato alla raccolta
informazioni, elaborazione dei contenuti, stesura dello scritto). Gli autori per recuperare questi costi pubblicano
i loro libri attraverso le case editrici le quali, per ricompensarli e per sostenere i loro costi, vendono i libri.
Ogni libro venduto, d’altra parte, ingolosisce ulteriormente gli autori e le stesse case editrici di un guadagno
generato dalla necessità ed esigenza del sapere dell’uomo; questo, naturalmente, fornisce un ulteriore incentivo
a vendere libri.
Se ogni autore pubblicasse i propri scritti su dominio pubblico (internet o qualsiasi altro canale di comunicazione),
nessuno più dovrebbe spendere per acquistare libri e nessuno dovrebbe spendere per produrli. Gli stessi autori
comprano a loro volta altri libri; se tutti pubblicassero in modo gratuito, gli stessi autori, pur non avendo
guadagno dalla vendita dei propri testi, non avrebbero le spese per il materiale prodotto da altri autori. Se
questo circolo virtuoso verrà innescato, arriveremo al punto in cui gli autori non daranno più un prezzo ai libri
di testo scolastici.
In quel momento non ci saranno più neppure case editrici
L’autore
2
Il contenuto di questo libro è protetto dalle leggi sul copyright e dalle disposizioni dei trattati internazionali.
il materiale qui contenuto può essere copiato (o comunque riprodotto) ed utilizzato liberamente dagli studenti,
dagli istituti scolastici afferenti ai Ministeri della Pubblica Istruzione per scopi istituzionali non a fine di lucro.
Ogni altro utilizzo o riproduzione (ivi incluse, ma non limitatamente a, le riproduzioni a mezzo stampa, su
supporti magnetici o su reti di calcolatori) in toto o in parte è vietata, se non esplicitamente autorizzata per
iscritto, a priori, da parte dell’autore. L’informazione contenuta in queste pagine è ritenuta essere accurata
alla data della pubblicazione. Essa è fornita per scopi meramente didattici. L’autore non si assume alcuna
responsabilità per il contenuto di queste pagine (ivi incluse, ma non limitatamente a, la correttezza, completezza, applicabilità ed aggiornamento dell’informazione). In ogni caso non può essere dichiarata conformità
all’informazione contenuta in queste pagine. In ogni caso questa nota di copyright non deve mai essere rimossa
e deve essere riportata anche in utilizzi parziali.
Copyright 2008 Fabio Panozzo
Prefazione
Legnano, 14 settembre 2008
Il presente libro nasce dall’esigenza di avere materiale semplice, completo e gratuito per l’insegnamento dell’elettrotecnica, sicurezza e disegno elettrico in un centro di formazione professionale.
Dopo tre anni di insegnamento ho ritenuto opportuno non gravare economicamente sulle famiglie degli allievi del Centro di Formazione Luigi Clerici per l’acquisto di libri di testo di cui ne
verrebbe utilizzata solo una parte o che non sono adatti all’esigenze dell’utenza; ho preferito
creare qualcosa su misura, che possa rendere ai ragazzi semplice lo studio della materia, che
possa interessarli e che soprattutto sia il più economico possibile.
La quasi totalità delle informazioni inserite in questo libro sono tratte dal world wide web, come
segno di coerenza e propaganda dell’informazione gratuita ed alla portata di tutti.
Fabio Panozzo
Ricordo e ringrazio
I collaboratori di Wikipedia, enciclopedia on-line, grazie alla quale sono riuscito
rapidamente a trovare tutte le informazioni di mio interesse ed a comporre questo
libro;
Ghirardello Matteo, caro amico, per i consigli nell’utilizzo di CAD grazie ai quali
ho risparmiato molto tempo ed alle nottate passate insieme a preparare i disegni
3D;
Fallea Marco, mio alunno, per i consigli sulla stesura, la rilettura e correzione
paziente, i disegni CAD utilizzati negli esercizi;
Tutti i miei colleghi , con i quali mi posso confrontare, crescere ed impare (e con
i quali il divertimento è assicurato!);
Magarelli Nicolò e Salvalaglio Giuseppe, colleghi di laboratorio, che pazientemente sopportano ogni mia richiesta e colmano ogni mia lacuna professionale;
Leoni Silvia, amica e collega, grazie alla quale tutto è cominciato, una sera incontrata quasi per caso, una chiaccherata, una domanda e, tre anni dopo, eccoci
qui...;
Poretti Michele, collega mai incontrato a cui sono successo; a te, tutto il mio
affetto.
ii
Agli alunni dell’Istituto “Fondazione Luigi Clerici”
affinché possiate imparare,
come grandi nomi nel campo elettrico hanno fatto prima di voi,
a donare la vostra vita dedicandovi al prossimo,
ovunque ed in qualunque modo.
iii
Indice
viii
Elenco delle figure
1
Elettrotecnica: grandezze e definizioni
1
1.1
Tensione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.2
Potenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.3
Resistenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.3.1
Resistenza di un filo conduttore . . . . . . . . . . . . . . . . . . . . . .
3
1.3.2
Resistore reale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.4
Legge di Ohm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.5
Generatori ideali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.6
Resistore ideale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.7
Topologia delle reti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.8
Leggi di Kirchhoff . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.8.1
Legge di Kirchhoff delle correnti . . . . . . . . . . . . . . . . . . . . . .
8
1.8.2
Legge di Kirchhoff delle tensioni . . . . . . . . . . . . . . . . . . . . . .
9
Serie e parallelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
1.9.1
Circuiti in serie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
1.9.2
Circuiti in parallelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
1.10 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
1.11 Soluzioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
Regime alternato sinusoidale
27
2.1
27
1.9
2
Induttore ideale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
INDICE
2.2
3
4
Condensatore ideale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
2.2.1
Leggi fisiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
2.2.2
La capacità (in un condensatore lineare) . . . . . . . . . . . . . . . . .
28
2.3
Valore efficace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
2.4
Le potenze in regime alternato sinusoidale . . . . . . . . . . . . . . . . . . . .
30
2.4.1
Potenza attiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
2.4.2
Potenza reattiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
2.4.3
Potenza apparente . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
2.5
Impedenza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
2.6
Collegamenti stella e triangolo . . . . . . . . . . . . . . . . . . . . . . . . . . .
34
2.6.1
35
Passaggio da triangolo a stella e da stella a tringolo . . . . . . . . . . .
La distribuzione dell’energia elettrica italiana
36
3.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
3.2
Sistemi di distribuzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
3.3
Schema di distribuzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
3.4
Messa a terra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
3.5
Contabilizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
3.6
Misuratore elettronico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
3.7
Caratteristiche di fornitura . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
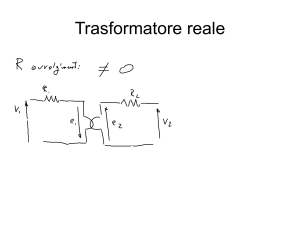
Trasformatore
41
4.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
4.2
Invenzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
4.3
Costruzione e principio di funzionamento . . . . . . . . . . . . . . . . . . . . .
43
4.4
Dal trasformatore ideale al reale . . . . . . . . . . . . . . . . . . . . . . . . . .
45
4.4.1
Riluttanza del nucleo non nulla . . . . . . . . . . . . . . . . . . . . . .
45
4.4.2
Perdite nel nucleo non nulle . . . . . . . . . . . . . . . . . . . . . . . .
46
4.4.3
Accoppiamento non perfetto tra gli avvolgimenti . . . . . . . . . . . . .
46
4.4.4
Resistenza degli avvolgimenti non nulle . . . . . . . . . . . . . . . . . .
46
4.4.5
Schema completo equivalente . . . . . . . . . . . . . . . . . . . . . . .
47
4.5
Il trasformatore reale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
4.6
Funzionamento a vuoto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
4.7
Funzionamento in corto circuito . . . . . . . . . . . . . . . . . . . . . . . . . .
49
v
INDICE
4.8
Prove sul Trasformatore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
4.8.1
Prova a vuoto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
51
Perdite e rendimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
4.10 Configurazione in parallelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
4.11 Valori nominali dei trasformatori . . . . . . . . . . . . . . . . . . . . . . . . .
53
4.12 Tipi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
4.12.1 Di tensione (TV) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
4.12.2 Di isolamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
4.12.3 Trasformatore trifase . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
4.12.4 Autotrasformatore . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
4.12.5 Trasformatore variabile o variac . . . . . . . . . . . . . . . . . . . . . .
56
4.12.6 Di corrente (TA) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
4.12.7 A corrente costante . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
4.12.8 Risonante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
4.12.9 Di impulso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
4.12.10 D’uscita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
4.12.11 Rotante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
4.13 Ricerca . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
Sistema trifase
60
5.1
Diagramma delle fasi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
5.2
Stella e triangolo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
5.3
Il neutro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
5.4
L’utenza monofase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
5.5
Le grandezze elettriche nei sistemi trifase . . . . . . . . . . . . . . . . . . . . .
63
5.6
Misura della potenza attiva . . . . . . . . . . . . . . . . . . . . . . . . . . . .
64
5.7
Vantaggi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
5.7.1
Momento di rotazione . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
5.7.2
Ottimizzazione dei conduttori . . . . . . . . . . . . . . . . . . . . . . .
66
5.7.3
Minori perdite di trasporto . . . . . . . . . . . . . . . . . . . . . . . . .
66
5.8
Codice colore CEI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
5.9
Rifasamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
5.9.1
Che cos’è . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
5.9.2
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
68
5.9.3
Il rifasamento elettrico - aspetti teorici e presupposti tecnici . . . . . .
69
4.9
5
vi
INDICE
6
Quando rifasare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
5.9.5
Calcolo della capacità . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
Motori elettrici
71
6.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
6.2
Funzionamento tecnico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72
6.2.1
Parti principali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72
6.2.2
Funzionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
Motori in corrente continua . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
6.3.1
Cenni storici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
6.3.2
Motore a spazzole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
6.3.3
Motore lineare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
6.3.4
Motore brushless . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
6.3.5
Motore passo-passo . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
Motori in corrente alternata . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
6.4.1
Motore asincrono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
6.4.2
Motore sincrono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
88
6.4.3
Motore monofase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
90
6.4.4
Motore trifase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
92
Motore CC con statore a filo avvolto . . . . . . . . . . . . . . . . . . . . . . .
94
6.3
6.4
6.5
A
5.9.4
Software e fonti
95
A.1 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
95
A.2 Fonti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
95
vii
Elenco delle figure
1.1
Resistori assiali (cioè con i reofori in asse) di diverso valore . . . . . . . . . . .
4
1.2
Significati delle linee colorate di un resistore . . . . . . . . . . . . . . . . . . .
5
1.3
Colori delle fasce delle resistenze . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.4
Generatore ideale di corrente (verde) e di tensione (blu): simboli circuitali
. .
6
1.5
Resistore ideale: simbolo circuitale . . . . . . . . . . . . . . . . . . . . . . . .
7
1.6
Esempio di circuito elettrotecnico . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.7
Nodi, rami e maglie di un circuito elettrotecnico . . . . . . . . . . . . . . . . .
8
1.8
Collegamento in serie di resistori . . . . . . . . . . . . . . . . . . . . . . . . . .
11
1.9
Collegamento in parallelo di resistori . . . . . . . . . . . . . . . . . . . . . . .
12
2.1
Induttore ideale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
2.2
Vari tipi di piccoli induttori reali . . . . . . . . . . . . . . . . . . . . . . . . .
27
2.3
Vari tipi di condensatori reali . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
2.5
Condensatore ideale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
2.6
Sinusoide di tensione alternata e valore efficace . . . . . . . . . . . . . . . . . .
29
2.7
Potenza istantanea e attiva in regime sinusoidale . . . . . . . . . . . . . . . . .
31
2.8
Tensione, corrente, potenza istantanea, potenza attiva e potenza apparente nel
caso di v e i in fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.9
33
Tensione, corrente, potenza istantanea, potenza attiva e potenza apparente nel
caso di v e i sfasate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
2.10 Configurazione di stella (circuito di sinistra) e triangolo (circuito di destra) . .
34
2.11 Schema di connessione a stella (circuito di sinistra) e triangolo (circuito di destra) 35
3.1
Traliccio dell’alta tensione . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
ELENCO DELLE FIGURE
4.1
Trasformatore: simbolo circuitale . . . . . . . . . . . . . . . . . . . . . . . . .
4.2
Trasformatore di media tensione su palo in una zona rurale. Alla sommità del
41
palo si vede l’arrivo dei tre fili della media tensione con isolatori in vetro,appena
sotto si vedono gli scaricatori per le sovratensioni di origine atmosferica, alla cui
altezza partono anche due cavi di uscita verso le utenze in bassa tensione. A
sinistra sopra il trasformatore è visibile il serbatoio dell’olio di raffreddamento
42
4.3
Schema di principio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
4.4
Trasformatore ideale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
4.5
Trasfomatore trifase a bagno d’olio privo del contenitore . . . . . . . . . . . .
48
4.6
Un trasformatore raffreddato ad olio con primario a 10 [kV] e secondario a 220
[V], risalente agli anni sessanta
. . . . . . . . . . . . . . . . . . . . . . . . . .
54
4.7
Trasformatore variabile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
4.8
Parte fissa di un trasformatore rotante a 6 canali usato in un videoregistratore
a 6 testine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
58
4.9
Parte rotante del trasformatore, con visibili tre delle sei testine . . . . . . . . .
59
5.1
Interruttore magnetotermico con differenziale per sistemi trifase (400 [V]) . . .
60
5.2
Diagramma delle fasi di un sistema trifase isofrequenziale . . . . . . . . . . . .
61
5.3
Sistema di trasmissione costituito da tre sistemi monofase . . . . . . . . . . . .
61
5.4
Rete trifase equivalente a quella di Figura 5.3 . . . . . . . . . . . . . . . . . .
62
5.5
Contatore elettronico trifase con magnetotermico fornito dall’ENEL per le industrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
5.6
Circuito per la misura della potenza in un sistema trifase con neutro . . . . . .
64
5.7
Misura della potenza in un sistema trifase con il metodo Aron . . . . . . . . .
65
5.8
Un elettrodotto (su cui si possono osservare quattro terne di fili) ed una cabina
elettrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66
5.9
Apparato per la correzione automatica dello sfasamento . . . . . . . . . . . . .
68
6.1
Illustrazione di un motore elettrico in corrente continua . . . . . . . . . . . . .
71
6.2
Spettro magnetico (ovvero l’insieme delle linee di campo) dovuto ad un magnete,
reso visibile da un po’ di limatura di ferro su un foglio di carta . . . . . . . . .
73
6.3
Particolare di un motore elettrico . . . . . . . . . . . . . . . . . . . . . . . . .
74
6.4
Schema del principio di funzionamento . . . . . . . . . . . . . . . . . . . . . .
75
6.5
Un semplice motore CC. Quando la corrente scorre negli avvolgimenti, si genera
un campo magnetico intorno al rotore. La parte sinistra del rotore è respinta
dal magnete di sinistra ed attirata da quello di destra. Analogamente fa la parte
in basso a destra. La coppia genera la rotazione . . . . . . . . . . . . . . . . .
76
ix
ELENCO DELLE FIGURE
6.6
Il rotore continua a girare . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7
Quando le armature si allineano orizzontalmente, il commutatore inverte la
76
direzione di corrente attraverso gli avvolgimenti, modificando anche il campo
magnetico. Il processo ritorna quindi allo stato di partenza e il ciclo si ripete .
6.8
AirTrain all’aeroporto JFK. Si noti la linea di indotti in allumino in mezzo alle
rotaie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
Motori passo-passo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
83
6.10 Struttura di un motore passo-passo . . . . . . . . . . . . . . . . . . . . . . . .
84
6.11 Il campo magnetico rotante generato in un motore asincrono trifase . . . . . .
85
6.12 Motore asincrono a gabbia di scoiattolo . . . . . . . . . . . . . . . . . . . . . .
87
6.13 Collegamenti di un motore bifase . . . . . . . . . . . . . . . . . . . . . . . . .
91
6.14 Collegamenti a triangolo (sinistra) e stella (destra) di un motore trifase . . . .
93
6.9
x
77
Capitolo
1
Elettrotecnica: grandezze e definizioni
La trattazione del presente capitolo ha valenza generale, tuttavia le formule riportate sono state
espresse in condizione di corrente continua, cioè di regime stazionario.
1.1
Tensione
Definizione 1.1 (Tensione (o differenza di potenziale - d.d.p.)). La tensione è il lavoro
effettuato per spostare la carica elettrica.
L’unità di misura della tensione è il Volt 1 [V ] in onore di Alessandro Volta.
Considerando L il lavoro espresso in Joule 2 [J ] valgono le seguenti equazioni:
L=Q·V
(1.1)
[J] = [C] · [V ]
(1.2)
Espressa in unità di misura:
1.2
Potenza
Definizione 1.2 (Potenza). La potenza è il lavoro svolto da una carica elettrica in un campo
elettrico nell’unità di tempo.
1
Alessandro Giuseppe Antonio Anastasio Volta: (Camnago, 18 febbraio 1745 - Como, 5 marzo 1827)
è stato un fisico e inventore italiano. E’ conosciuto soprattutto per l’invenzione della pila elettrica.
2
James Prescott Joule: (Salford, 24 dicembre 1818 - Sale, 11 ottobre 1889) è stato un fisico inglese.
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
Si tratta semplicemente della definizione data in fisica nel caso particolare in cui le uniche
forze presenti siano quelle dovute al campo elettrico.
Esprimendola tramite le grandezze usate in elettrotecnica si ottiene:
P =V ·I
(1.3)
L’unità di misura della potenza è il Watt [W ]. La potenza può essere anche espressa in termini
di lavoro nell’unità di tempo:
P =
Con le relative unità di misura:
[W ] =
1.3
L
t
(1.4)
[J]
[s]
(1.5)
Resistenza
Definizione 1.3 (Resistenza). La resistenza elettrica è una grandezza fisica che misura la
tendenza di un conduttore di opporsi al passaggio di una corrente elettrica quando è sottoposto
ad una tensione.
Questa opposizione dipende dal materiale con cui è realizzato, dalle sue dimensioni e dalla sua temperatura. Uno degli effetti del passaggio di corrente in un conduttore è il suo
riscaldamento (effetto Joule3 ).
La resistenza è data dalla:
R=
V
I
(1.6)
dove:
• R: resistenza tra gli estremi del componente misurata in Ohm [⌦];
• V: tensione a cui è sottoposto il componente, misurata in Volt [V ];
• I: corrente che attraversa il componente misurata in Ampere [A].
NOTA: molti ritengono che l’equazione sopra sia la legge di Ohm ma ciò è sbagliato. Questa
equazione è semplicemente la definizione di resistenza. La legge di Ohm, invece, si riferisce a una
relazione lineare fra corrente e tensione per alcune classi di conduttori, per i quali il rapporto
tra tensione e corrente è costante, indipendentemente dalla tensione applicata. Per queste classi
di conduttori, allora, la definizione sopra di resistenza diventa anche la prima legge di Ohm.
3
Effetto Joule: osservato dal fisico James Prescott Joule attorno al 1840, è quel fenomeno per cui un
conduttore attraversato da una corrente elettrica dissipa energia sotto forma di calore in quantità proporzionale
al tempo trascorso ed alla potenza del circuito.
2
1.3. RESISTENZA
1.3.1
Resistenza di un filo conduttore
La resistenza R di un filo può essere calcolata
R=⇢·
l
S
(1.7)
dove:
• l: lunghezza del filo, misurata in [m];
• S: area della sezione, misurata in [mm 2 ];
• ⇢4 : resistività elettrica (detta anche resistenza elettrica specifica o resistività) del matemm2 ].
riale, misurata in [ ⌦ · m
La resistività è la misura della capacità del materiale di opporsi al fluire in esso della
corrente elettrica (indipendentemente dalle sue dimensioni e dalla sua forma). Frequentemente
mm2 ] e ciò esprime la resistenza in [⌦] di uno specifico
la resistenza specifica viene data in [ ⌦ · m
materiale di lunghezza 1 [m] e sezione 1 [mm2 ]. Ad esempio la resistenza specifica del rame è
mm2 ] e ciò sta ad indicare che un filo di rame di lunghezza 1 [m] e sezione 1 [mm2 ]
0,0175 [ ⌦ · m
ha una resistenza elettrica di 0,0175 [⌦].
NOTA: vi sono due motivi per cui una piccola sezione del filo tende ad aumentare la sua
resistenza. Uno è che gli elettroni, che hanno tutti la stessa carica negativa, si respingono
tra di loro. Quindi c’ una resistenza alla loro compressione in un piccolo spazio. L’altro
motivo è dovuto al fatto che gli elettroni “si urtano” tra di loro generando scattering (in inglese
letteralmente: sparpagliamento, dispersione) e quindi mutano la loro traiettoria originale.
1.3.2
Resistore reale
Il resistore (comunemente resistenza) è un componente elettrico di enorme importanza per
le sue innumerevoli applicazioni sia in apparecchiature elettriche che elettroniche. I resistori
sono a volte utilizzati per convertire energia elettrica in energia termica.
I resistori reali, spesso anche chiamati impropriamente resistenze, sono caratterizzati dal
valore della loro resistenza elettrica, espressa in Ohm [⌦], nonch dalla massima potenza che
possono dissipare, senza distruggersi, espressa in Watt [W ]. A volte, ma più raramente, al posto
del valore della resistenza, è indicato quello della loro conduttanza (che è l’inverso matematico
della resistenza). Per molte applicazioni civili ed industriali, al posto del loro valore resistivo,
ovvero della resistenza, si indica la tensione tipica di funzionamento, espressa in Volt [V ].
Sia in campo civile che industriale, l’impiego prevalente dei resistori è quello di produrre
calore da elettricità per Effetto Joule. Molti sono gli impieghi negli elettrodomestici, quali forni
4
⇢ - ro minuscola: lettera greca
3
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
elettrici, ferri da stiro e bollitori d’acqua, asciugacapelli, lavatrici e lavastoviglie, ecc... Un ferro
da stiro, tipicamente, ha un resistore della potenza di 1 [kW ]. Resistori di potenze anche molto
superiori sono utilizzati nei forni industriali e nei circuiti di controllo dei veicoli elettrici (per
esempio nei locomotori elettrici) per dissipare l’energia in eccesso (per questo ultimo impiego,
recentemente sono stati sostituiti da circuiti di regolazione elettronici più efficienti).
Questi resistori, cosiddetti di potenza, sono tipicamente realizzati con un avvolgimento
di filo di leghe metalliche a base di ferro, cromo, tungsteno, una lega utilizzata da molto
tempo per questo uso è la costantana. Per
evitare, parzialmente, che questo tipo di resistori a filo si comporti da induttore (perch si
vuole avere un comportamento resistivo puro
o si vuole evitare la generazione di interferenze elettromagnetiche) l’avvolgimento viene fatto sia in un senso che in quello opposto
(avvolgimento detto di Ayrton Perry).
Figura 1.1: Resistori assiali (cioè con i reofori in
asse) di diverso valore
I resistori trovano poi largo impiego nei
circuiti elettronici, per i quali sono prodotti in una variet di forme e assortimenti di valori
resistivi (da frazioni di Ohm a svariate centinaia di Megaohm) e di potenza (da pochi Milliwatt
a centinaia di Watt).
Calcolare il valore della resistenza di un resistore reale
Il calcolo del valore della resistenza di un resistore reale è un conto molto agevole grazie alla
Figura 1.3.
Ogni resistenza ha disegnate su di sé quattro o cinque linee colorate (in questo paragrafo
tratteremo solo il caso con quattro). Le fasce sono divise in due gruppi: un gruppo di tre ed
un’ultima più lontana dalle altre. La loro numerazione avviene guardando il resistore con il
gruppo delle tre linee a sinistra e numerando le fasce con ordinamento lessicografico.
Ognuna di esse ha un particolare significato:
• I fascia: I cifra;
• II fascia: II cifra;
• III fascia: moltiplicatore;
• IV fascia: tolleranza.
4
1.3. RESISTENZA
Il valore della resistenza si ricava scrivendo accanto I cifra e II cifra, moltiplicandole per il
moltiplicatore ed aggiungendo la tolleranza.
Il tutto è sintetizzato dalla seguente formula:
I cifra II cifra · moltiplicatore ± tolleranza %
Figura 1.2: Significati delle linee colorate di un
resistore
Colore
I fascia
II fascia
III fascia
IV fascia
I cifra
II cifra
Moltiplicatore
Tolleranza
0
1
Nero
Marrone
1
1
101
1%
Rosso
2
2
102
2%
Arancio
3
3
103
Giallo
4
4
104
Verde
5
5
105
Azzurro
6
6
106
Violetto
7
7
Grigio
8
8
Bianco
9
9
Oro
10-1
5%
Argento
10-2
10%
Magenta
20%
Figura 1.3: Colori delle fasce delle resistenze
5
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
1.4
Legge di Ohm
La legge di Ohm5 esprime una relazione tra la differenza di potenziale V (tensione elettrica)
ai capi di un conduttore e la corrente elettrica I che lo attraversa. Sia R la resistenza del
conduttore, abbiamo:
V =R·I
(1.8)
Gli elementi elettrici per i quali la legge è soddisfatta sono detti resistori (o resistenze) ideali
o ohmici; tuttavia, per ragioni storiche, si continua ad attribuire all’enunciato il rango di legge.
Si noti che la legge di Ohm esprime unicamente la relazione di linearità fra la corrente elettrica
I e la differenza di potenziale V applicata. L’equazione indicata è semplicemente una forma
dell’espressione che definisce il concetto di resistenza ed è valida per tutti i dispositivi conduttori.
1.5
Generatori ideali
I componenti in cui si sviluppano forze elettriche specifiche
generatrici sono detti generatori elettrici. Essi sono sede delle interazioni tra fenomeni elettrici e fenomeni di altra natura (p.e. la
batteria di accumulatori delle autovetture trasforma energia chimica in energia elettrica), che realizzano la generazione di energia
Figura 1.4: Generatore ideale
di corrente (verde) e di tensione (blu): simboli circuitali
elettrica attraverso la conversione da altre forme di energia.
Sono dei bipoli attivi, sono dotati di terminali (o morsetti)
che consentono la connessione con altri componenti elettrici e si
dividono in due categorie: tensione e corrente.
Definizione 1.4 (Generatore ideale di tensione). Il generatore ideale di tensione è un dispositivo capace di mantenere, in modo costante nel tempo, una tensione tra i suoi morsetti pari
alla sua f.e.m. (forza elettromotrice), sempre identica nonostante le variazioni di corrente (e
quindi del carico alimentato).
Definizione 1.5 (Generatore ideale di corrente). Il generatore ideale di corrente fornisce ai
morsetti una corrente sempre identica, indipendentemente dalla variazione di tensione o del
carico (resistenza).
I generatori ideali si definiscono tali perché hanno resistenza interna nulla.
I generatori ideali, ovviamente, non esistono: sarebbero infatti in grado di erogare una
potenza arbitrariamente grande (se necessario infinita, ad esempio in cortocircuito). Infatti,
dato un generatore ideale di tensione, essendo la corrente non vincolata, la potenza erogata ai
suoi morsetti può assumere qualsiasi valore tra più e meno infinito (stesso dicasi per i generatori
5
Georg Simon Ohm: (Erlangen, 16 marzo 1789 - Monaco di Baviera, 6 giugno 1854) è stato un fisico
tedesco.
6
1.6. RESISTORE IDEALE
ideali di corrente). Un generatore ideale è quindi in grado di erogare o assorbire una potenza
arbitraria, il che è fisicamente impossibile.
Malgrado questo fatto, i generatori ideali sono essenziali nello studio delle reti elettriche.
Infatti:
• qualsiasi generatore reale si comporta approssimativamente come un generatore ideale se
la potenza che sta erogando è piccola rispetto alla potenza massima che è in grado di
erogare;
• qualsiasi generatore reale può essere rappresentato dalla combinazione di un generatore
ideale con una impedenza6 .
1.6
Resistore ideale
Nella Teoria dei circuiti 7 il resistore è un componente ideale (resistenza) che risponde, se lineare, alla legge di Ohm, i resistori non
lineari sono essenziali per fare modelli circuitali, per esempio, degli
oscillatori elettronici.
I resistori lineari ideali non hanno in generale limiti in potenza e
sono caratterizzati da una relazione costitutiva lineare per qualsiasi
valore di tensione e corrente.
1.7
Figura 1.5:
Resistore
ideale: simbolo circuitale
Topologia delle reti
Definizione 1.6 (Nodo). Un nodo è un punto nel quale confluiscono almeno tre conduttori.
Definizione 1.7 (Ramo). Un ramo è ciascun tratto di circuito compreso tra due nodi adiacenti.
Definizione 1.8 (Maglia). Una maglia è un insieme di più rami consecutivi costituente un
circuito chiuso.
Per le reti elettriche, indicando con M il numero delle maglie, con R il numero dei rami e
con N il numero dei nodi, esiste la relazione:
M =R
6
N +1
(1.9)
Impedenza: L’impedenza è una grandezza fisica vettoriale che rappresenta la forza di opposizione di un
bipolo al passaggio di una corrente elettrica alternata.
7
Teoria dei circuiti: La teoria dei circuiti, o teoria delle reti elettriche, dal punto di vista dell’ingegneria
elettrica è la disciplina che si occupa della caratterizzazione sistematica dei circuiti elettrici tramite la creazione
di modelli matematici.
7
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
Esempio 1.1.
Calcolare il numero di nodi, rami e maglie della Figura 1.6
Figura 1.6: Esempio di circuito elettrotecnico
Soluzione (dell’esempio) 1.1 (Nodi 5, rami 6, maglie 2).
Figura 1.7: Nodi, rami e maglie di un circuito elettrotecnico
1.8
Leggi di Kirchhoff
Le leggi di Kirchhoff descrivono le proprietà dei circuiti elettrici a parametri concentrati. Furono
formulate da Gustav Robert Kirchhoff8 nel 1845 a seguito di esperimenti empirici. Nei circuiti a
parametri concentrati sostituiscono completamente le leggi dell’elettromagnetismo permettendo
di ridurle a pure relazioni topologiche.
1.8.1
Legge di Kirchhoff delle correnti
Definizione 1.9 (Legge di Kirchhoff delle correnti (LKC o LKI)). Definita una superficie
chiusa che attraversi un circuito elettrico, la somma algebrica delle correnti che attraversano
la superficie (con segno diverso se entranti o uscenti) è nulla.
8
Gustav Robert Kirchhoff (Knigsberg, 12 marzo 1824 - Berlino, 17 ottobre 1887) è stato un fisico e
matematico tedesco. Si occupò specialmente di spettroscopia, elettrotecnica e termodinamica.
8
1.8. LEGGI DI KIRCHHOFF
Definendo una superficie che racchiuda un singolo nodo del circuito, si può dire che in esso
la somma delle correnti entranti è uguale alla somma delle correnti uscenti.
Indicando con Ie le correnti entranti e con Iu le correnti uscenti, in formula si scrive:
X
Ie =
X
Iu
(1.10)
Ad esempio, prendiamo un nodo a cui giungono quattro rami del circuito e chiamiamo le
correnti i1 , i2 , i3 ed i4 . Decido che da un solo ramo uscir corrente (i4 ), quindi la formula sar:
i1 + i2 + i3 = i4
(1.11)
In questo caso essendoci un’unica uscita, i4 sarà la somma di tutte le altre correnti. La somma
algebrica totale sar quindi nulla. Se risolvendo il circuito otteniamo un valore negativo di
corrente questo significa che il verso effettivo con cui la carica percorre il ramo è l’opposto di
quello ipotizzato all’inizio.
Se il circuito è in corrente continua la somma va intesa come somma algebrica. Se il circuito
è in regime sinusoidale la somma può essere fatta anche sui fasori corrispondenti alle correnti
(quindi come somma vettoriale).
La prima legge semplicemente riflette il fatto che la carica non può essere dispersa. Se
vengono indicati tutti i possibili tragitti lungo i quali il trasferimento della carica è possibile, e se
si è certi che una emissione effettiva di elettroni o effetti collaterali non esistono, allora la carica
netta spostata verso un nodo, deve uguagliare quella che vi si allontana. Conseguentemente, la
velocit totale con cui la carica entra in un nodo, ovvero la corrente in entrata, deve uguagliare
la velocit totale della carica che lo lascia, ovvero la corrente in uscita.
1.8.2
Legge di Kirchhoff delle tensioni
Definizione 1.10 (Legge di Kirchhoff delle tensioni (LKT o LKV)). La somma algebrica delle
tensioni lungo una linea chiusa (con il segno appropriato in funzione del verso di percorrenza
della maglia stessa) è pari a zero.
Data una maglia ed indicando con Va le tensioni positive in senso antiorario e Vo le tensioni
positive in senso orario, in formula si può scrivere:
X
Va =
X
Vo
(1.12)
Una maglia è un percorso chiuso di una rete elettrica che partendo da un nodo torna allo stesso
senza attraversare uno stesso ramo due volte, non è necessario che tra due nodi successivi di una
maglia ci sia un componente “effettivo” (anche perché si può sempre immaginare la presenza di
un componente circuito aperto).
9
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
Ad esempio, prendiamo una maglia nella quale ci sono quattro elementi e chiamiamo le
tensioni v1 , v2 , v3 e v4 . Decido che due correnti sono orarie (v1 e v2 ) e due sono antiorarie (v3
e v4 ), quindi la formula sarà:
v1 + v2 = v3 + v4
(1.13)
Questa legge corrisponde alla legge di conservazione dell’energia per un campo conservativo, in
quanto afferma che il lavoro compiuto per far compiere ad una carica un percorso chiuso deve
essere uguale a zero.
1.9
Serie e parallelo
I componenti elettrici di un circuito elettrico possono essere collegati fra loro in serie oppure in
parallelo per mezzo di un conduttore elettrico che “trasporta” la corrente per il funzionamento.
(In pratica un filo elettrico, che naturalmente varia a seconda della quantità di corrente che vi
deve scorrere).
Conoscendo il valore della resistenza e l’intensità della corrente elettrica è possibile determinare la tensione elettrica su una resistenza con la Legge di Ohm:
V =R·I
(1.14)
Ovviamente, conoscendo la tensione sulla resistenza e il valore stesso della resistenza, è possibile
calcolare l’intensità della corrente elettrica che circola utilizzando la stessa formula all’inverso:
I=
1.9.1
V
R
(1.15)
Circuiti in serie
Si parla di collegamento in serie quando due o più componenti sono collegati in modo da formare
un percorso unico per la corrente elettrica che li attraversa; nel caso di componenti elettrici a
due terminali il collegamento in serie prevede che l’estremità di ciascuno di essi sia collegata
solo con l’estremità di un altro, come se fossero persone che si prendono per mano a formare
una catena. Il primo e l’ultimo componente hanno una estremità libera, e a queste si applica
la tensione elettrica, in pratica cio si infilano le due estremità libere del conduttore (filo) in
una presa elettrica o vi si applica una batteria o qualsiasi altro generatore di corrente, che
grazie alla propria tensione genera una corrente, o meglio un flusso di corrente, che permette il
funzionamento di tutto l’insieme.
Due elementi in serie hanno due caratteristiche fondamentali:
10
1.9. SERIE E PARALLELO
• Hanno in comune un solo morsetto;
• Sono attraversati dalla stessa corrente.
Resistori
La resistenza totale di n resistori in serie è data dalla somma delle resistenze di ciascun resistore:
Rtotale = R1 + R2 + · · · + Rn
(1.16)
Il collegamento in serie di resistori a volte
si adotta per necessit. Un tipico esempio è
il circuito che genera l’alta tensione nei vecchi oscilloscopi a tubo catodico; Un resistore
da 50 [M ⌦] (MegaOhm) avente ai suoi capi
una tensione di 2000 [V ], va incontro a conse-
Figura 1.8: Collegamento in serie di resistori
guenze distruttive nel caso si verifichi un arco
voltaico; per prevenire questo rischio, il costruttore realizza il resistore da 50 [M ⌦] collegando in
serie 5 resistori da 10 [M ⌦], conseguentemente ciascun resistore vede ai suoi capi una tensione
di 400 [V ], un valore di tutta sicurezza.
1.9.2
Circuiti in parallelo
Si parla invece di collegamento in parallelo quando i componenti sono collegati ad una coppia
di conduttori in modo che la tensione elettrica sia applicata a tutti quanti allo stesso modo.
Riprendendo l’esempio delle persone, queste sono disposte fra due corde distese e parallele, ed
ogni persona stringe ciascuna corda con una mano in modo che ognuno tenga con la mano
destra la stessa corda che tutti gli altri tengono con la mano destra, e lo stesso per la mano
sinistra. Due elementi in parallelo hanno due caratteristiche fondamentali:
• Hanno in comune entrambi i morsetti;
• Su di essi cade la stessa tensione.
Resistori
La resistenza totale di n resistori in parallelo è data dalla relazione:
1
Rtotale
=
1
1
1
+
+ ··· +
R1 R2
Rn
(1.17)
11
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
Se in un circuito occorre dissipare in calore 100 [W ] tramite un resistore da 50 [⌦], a volte
risulta più conveniente impiegare due resistori da 100 [⌦] - 50 [W ], collegati in parallelo.
Ovvero è il reciproco della somma dei reciproci delle resistenze dei singoli resistori.
La formula sopra citata si semplifica notevolmente nel caso di sole due resistori. In questo
caso si avrà:
Rtotale =
1.10
R1 · R2
R1 + R2
(1.18)
Figura 1.9: Collegamento in parallelo di resistori
Esercizi
Esercizio 1.1.
Di una resistenza sono noti la lunghezza 0.02 [m], la sezione 5 [mm 2 ] e la resistività 10
mm2 ]. Calcolare il valore della resistenza espresso in [⌦].
[⌦ · m
Esercizio 1.2.
Di una resistenza sono noti la lunghezza 0.04 [m], la sezione 4 [mm 2 ] e la resistività 1
mm2 ]. Calcolare il valore della resistenza espresso in [⌦].
[⌦ · m
Esercizio 1.3.
Di una resistenza sono noti la lunghezza 0.06 [m], la sezione 3 [mm 2 ] e la resistività 5
mm2 ]. Calcolare il valore della resistenza espresso in [⌦].
[⌦ · m
Esercizio 1.4.
Di una resistenza sono noti la lunghezza 0.01 [m], la sezione 6 [mm 2 ] e la resistività 30
mm2 ]. Calcolare il valore della resistenza espresso in [⌦].
[⌦ · m
Esercizio 1.5.
Di una resistenza sono noti la lunghezza 0.05 [m], la sezione 2 [mm 2 ] e la resistività 10
mm2 ]. Calcolare il valore della resistenza espresso in [⌦].
[⌦ · m
12
1.10. ESERCIZI
Esercizio 1.6.
Di una resistenza sono noti i seguenti colori: I fascia rosso, II fascia nero, III fascia marrone,
IV fascia argento. Calcolare il valore della resistenza espresso in [⌦].
Esercizio 1.7.
Di una resistenza sono noti i seguenti colori: I fascia marrone, II fascia verde, III fascia
rosso, IV fascia oro. Calcolare il valore della resistenza espresso in [⌦].
Esercizio 1.8.
Di una resistenza sono noti i seguenti colori: I fascia giallo, II fascia arancio, III fascia verde,
IV fascia magenta. Calcolare il valore della resistenza espresso in [⌦].
Esercizio 1.9.
Di una resistenza sono noti i seguenti colori: I fascia azzurro, II fascia grigio, III fascia
giallo, IV fascia marrone. Calcolare il valore della resistenza espresso in [⌦].
Esercizio 1.10.
Di una resistenza sono noti i seguenti colori: I fascia violetto, II fascia bianco, III fascia
azzurro, IV fascia rosso. Calcolare il valore della resistenza espresso in [⌦].
Esercizio 1.11.
Calcolare il numero di nodi, rami e maglie della seguente figura.
13
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
Esercizio 1.12.
Calcolare il numero di nodi, rami e maglie della seguente figura.
14
1.10. ESERCIZI
Esercizio 1.13.
Calcolare il numero di nodi, rami e maglie della seguente figura.
15
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
Esercizio 1.14.
Calcolare il numero di nodi, rami e maglie della seguente figura.
16
1.10. ESERCIZI
Esercizio 1.15.
Calcolare il numero di nodi, rami e maglie della seguente figura.
17
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
Esercizio 1.16.
Calcorale il valore della corrente incognita nel nodo della seguente figura.
Esercizio 1.17.
Calcorale il valore della corrente incognita nel nodo della seguente figura.
18
1.10. ESERCIZI
Esercizio 1.18.
Calcorale il valore della corrente incognita nel nodo della seguente figura.
Esercizio 1.19.
Calcorale il valore della corrente incognita nel nodo della seguente figura.
19
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
Esercizio 1.20.
Calcorale il valore della corrente incognita nel nodo della seguente figura.
Esercizio 1.21.
Calcorale il valore della tensione incognita nella maglia della seguente figura.
Esercizio 1.22.
Calcorale il valore della tensione incognita nella maglia della seguente figura.
20
1.11. SOLUZIONI
Esercizio 1.23.
Calcorale il valore della tensione incognita nella maglia della seguente figura.
Esercizio 1.24.
Calcorale il valore della tensione incognita nella maglia della seguente figura.
Esercizio 1.25.
Calcorale il valore della tensione incognita nella maglia della seguente figura.
1.11
Soluzioni
Soluzione 1.1 (0.04 ⌦).
21
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
Soluzione 1.2 (0.01 ⌦).
Soluzione 1.3 (0.1 ⌦).
Soluzione 1.4 (0.05 ⌦).
Soluzione 1.5 (0.25 ⌦).
Soluzione 1.6 (200 ⌦ ± 10%).
Soluzione 1.7 (1500 ⌦ ± 5%).
Soluzione 1.8 (4300000 ⌦ ± 20%).
Soluzione 1.9 (680000 ⌦ ± 1%).
Soluzione 1.10 (79000000 ⌦ ± 2%).
Soluzione 1.11 (Nodi 3, rami 5, maglie 3).
Soluzione 1.12 (Nodi 5, rami 8, maglie 4).
22
1.11. SOLUZIONI
Soluzione 1.13 (Nodi 5, rami 8, maglie 4).
23
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
Soluzione 1.14 (Nodi 5, rami 9, maglie 5).
24
1.11. SOLUZIONI
Soluzione 1.15 (Nodi 11, rami 22, maglie 12).
Soluzione 1.16 (2 A).
Soluzione 1.17 (2 A).
Soluzione 1.18 (1 A).
Soluzione 1.19 (2 A).
25
Capitolo 1. ELETTROTECNICA: GRANDEZZE E DEFINIZIONI
Soluzione 1.20 (1 A).
Soluzione 1.21 (8 V).
Soluzione 1.22 (4 V).
Soluzione 1.23 (6 V).
Soluzione 1.24 (4 V).
Soluzione 1.25 (4 V).
26
Capitolo
2
Regime alternato sinusoidale
Nella trattazione del presente capitolo si assume di operare sempre in regime sinusoidale quindi,
dove non diversamente specificato, le formule si riferiranno al caso di corrente alternata.
2.1
Induttore ideale
L’induttore è un componente elettrico che genera
un campo magnetico al passaggio di corrente elettrica
(continua o alternata od impulsiva).
Nella teoria dei circuiti l’induttore è un componente ideale (la cui grandezza fisica è l’induttanza) in cui
tutta l’energia elettrica assorbita è immagazzinata nel
Figura 2.1: Induttore ideale
campo magnetico prodotto. Gli induttori reali, realizzati con un avvolgimento di un filo conduttore, presentano anche fenomeni dissipativi e
capacitativi di cui si deve tenere conto.
Gli induttori sono impiegati in una varietà
di dispositivi elettrici ed elettronici, tra i quali
i trasformatori ed i motori elettrici nonché in
svariati circuiti a corrente alternata ad alta
frequenza.
Una corrente elettrica i che scorre in un
circuito elettrico produce un campo magnetico nello spazio circostante e un flusso magnetico
attraverso il circuito.
Figura 2.2: Vari tipi di piccoli induttori reali
Capitolo 2. REGIME ALTERNATO SINUSOIDALE
Definizione 2.1 (Induttanza). L’induttanza del circuito è quindi il rapporto tra il flusso
magnetico generato e la corrente passante.
La definizione operativa di induttanza di una spira di corrente è data dalla seguente relazione:
L=
(2.1)
i
La caratteristica dell’induttore è l’induttanza L e si misura in [H ] (Henry1 ).
2.2
Condensatore ideale
Il condensatore o capacitore è un componente elettrico che immagazzina l’energia in
un campo elettrostatico, accumulando al suo
interno una certa quantità di carica elettrica.
Nella Teoria dei Circuiti il condensatore è
Figura 2.3: Vari tipi di condensatori reali
un componente ideale che può mantenere la
carica e l’energia accumulata all’infinito, se
isolato (ovvero non connesso ad altri circuiti), oppure scaricare la propria carica ed energia in
un circuito a cui è collegato.
Nei circuiti in regime sinusoidale permanente esso determina una differenza di fase di 90
gradi fra la tensione applicata e la corrente che lo attraversa.
2.2.1
Leggi fisiche
Un condensatore è generalmente costituito da una qualsiasi coppia di conduttori (armature
o piastre) separati da un isolante (dielettrico). La carica è immagazzinata sulla superficie delle
piastre, sul bordo a contatto con il dielettrico. Poiché ogni piastra immagazzina una carica
uguale ma di segno opposto una rispetto all’altra, la carica totale nel dispositivo è sempre zero.
L’energia elettrostatica che il condensatore accumula si localizza nel materiale dielettrico che è
interposto fra le armature.
2.2.2
La capacità (in un condensatore lineare)
Se si applica una differenza di potenziale alle armature, le cariche elettriche si separano e si
forma un campo elettrico all’interno del dielettrico. L’armatura collegata al potenziale più alto
1
Joseph Henry: (71 Dicembre 1797 - 13 Maggio 1878) fu uno scienziato americano noto anche per essere
stato il primo segretario dello Smithsonian Institute
28
2.3. VALORE EFFICACE
si carica positivamente, negativamente l’altra. Le cariche positive e negative sono uguali ed il
loro valore assoluto costituisce la carica Q del condensatore.
Definizione 2.2 (Capacità). La capacità elettrica o capacitanza è una grandezza fisica scalare che misura la quantità di carica elettrica accumulata da un condensatore in rapporto alla
differenza di potenziale fra i suoi capi.
La carica è proporzionale alla tensione applicata e la costante di proporzionalità è una caratteristica di quel particolare
Figura 2.5:
Condensatore
condensatore che si chiama capacità elettrica (simbolo C):
ideale
C=
Q
V
(2.2)
Ossia la capacità è uguale al rapporto tra la carica elettrica fornita Q e la differenza di
potenziale V . L’unità di misura della capacità è [F ] (Farad2 ).
2.3
Valore efficace
Il valore efficace di una grandezza elettrica in corrente alternata è un parametro
che ha lo scopo di semplificare i calcoli ingegneristici evitando di analizzare ogni istante
infinitesimo che costituisce la forma d’onda.
Il valore efficace di una grandezza equivale a quel valore che in regime di tensione
continua svilupperebbe la stessa potenza. Un
segnale variabile periodico infatti non ha un
valore definito di tensione o corrente come nel
caso della corrente continua, ma varia istante per istante. Ad esempio sottoponendo un
resistore a una corrente alternata, cioè di forma d’onda sinusoidale variabile in ampiezza
fra +318 [V ] e -318 [V ] si svilupperebbero gli
Figura 2.6:
Sinusoide di tensione alternata e
valore efficace
stessi effetti di riscaldamento come se fosse sottoposto a una tensione continua di 230 [V ].
Matematicamente, dato il valore d’ampiezza VM AX dell’onda si ottiene facilmente il valore
efficace VEF F attraverso la formula:
2
Michael Faraday: (Newington Butts, 22 settembre 1791 - Hampton Court, 25 agosto 1867) è stato un
chimico e fisico britannico.
29
Capitolo 2. REGIME ALTERNATO SINUSOIDALE
VM AX
VEF F = p
2
(2.3)
Nel seguito della trattazione, dove non diversamente specificato, i valori efficaci delle tensioni
saranno indicati semplicemente con la loro lettera maiuscola (p.e. V ), mentre i valori massimi
con la lettera maiuscula seguita dal solo pedice
2.4
M
(p.e. VM ).
Le potenze in regime alternato sinusoidale
Si ricorda che:
Definizione 2.3 (Potenza). La potenza è il lavoro svolto da una carica elettrica in un campo
elettrico nell’unità di tempo.
Esprimendola tramite le grandezze variabili nel tempo:
(2.4)
p(t) = v(t) · i(t)
dove p(t) è la potenza entrante (uscente) in un componente se la tensione v(t) e la corrente
i(t) sono misurati con un verso che rispetti la convenzione degli utilizzatori (convenzione dei
generatori). Generalmente la potenza espressa in funzione del tempo viene chiamata potenza
istantanea per distinguerla dalle grandezze usate nei sistemi periodici (che sono invece delle
medie sul periodo).
Si ricorda altresì che in corrente continua tutta la potenza fornita dai generatori è dissipata
sui resistori del circuito. La potenza istantanea assorbita da un resistore, il cui valore di
resistenza è R, si può calcolare, come in qualsiasi regime di funzionamento, con la legge di
Ohm. La potenza p(t) sarà allora data dalla formula generale:
p(t) = v(t) · i(t) = R · i2 (t) =
v 2 (t)
R
(2.5)
se v(t) e i(t) sono, rispettivamente, la tensione e la corrente misurate nell’istante t sul bipolo
secondo la convenzione degli utilizzatori. In corrente continua si può semplicemente scrivere:
P = R · I2 = V · I =
30
V2
R
(2.6)
2.4. LE POTENZE IN REGIME ALTERNATO SINUSOIDALE
2.4.1
Potenza attiva
Definizione 2.4 (Potenza attiva). La potenza attiva è la media della potenza istantanea sul
periodo.
Esprimendola in modo matematico otteniamo:
P = V · I · cos '
(2.7)
dove il termine ' indica l’angolo di sfasamento tra tensione e corrente e cos ' prende
il nome di fattore di potenza.
Questa grandezza rappresenta l’energia assorbita dal bipolo in un periodo (o generata, a
seconda della convenzione utilizzata) e viene quindi chiamata potenza attiva o potenza reale. È legata, come detto sopra, alla
componente a segno costante della potenza
istantanea.
La definizione di media sul periodo della
Figura 2.7: Potenza istantanea e attiva in regime
potenza istantanea resta valida in qualunque sinusoidale
regime periodico. La potenza attiva si misura
in [W ] Watt.
2.4.2
Potenza reattiva
Alcuni bipoli (bipoli reattivi) come induttori e condensatori sono in grado di immagazzinare
energia e cederla successivamente. Poiché gli scambi avvengono in modo conservativo, l’energia
complessivamente ceduta o assorbita in un periodo è nulla. L’effetto complessivo è che corrente
e tensione vengono sfasate.
Per tenere conto di questo fenomeno, si introduce la potenza reattiva.
Definizione 2.5 (Potenza reattiva). La potenza reattiva è definita come la massima potenza
reattiva istantanea.
Esprimendola in modo matematico otteniamo:
Q = V · I · sin '
(2.8)
31
Capitolo 2. REGIME ALTERNATO SINUSOIDALE
di nuovo ' è l’angolo di sfasamento. In regimi periodici non sinusoidali la definizione di
potenza reattiva è meno intuitiva (vedere sotto). In regime sinusoidale è la parte immaginaria
della potenza complessa. L’unità di misura è preferibilmente il [VAr ] (Voltampere reattivo).
2.4.3
Potenza apparente
Per quanto non dissipino energia, i bipoli reattivi fanno sì che in alcuni intervalli di tempo
la corrente che circola sia maggiore di quella necessaria ai carichi resistivi (e quindi anche la
potenza istantanea ceduta dal generatore). Per dimensionare opportunamente conduttori e
generatori si introduce allora la potenza apparente:
A=V ·I
A=
p
P 2 + Q2
(2.9)
Definizione 2.6 (Potenza apparente). La potenza apparente è l’ampiezza della massima oscillazione della potenza istantanea rispetto alla potenza attiva.
In regimi periodici non sinusoidali la definizione è sempre il prodotto dei valori efficaci di
tensione e corrente. Si misura in [VA] (Voltampere).
Dall’equazione 2.9 si deduce che:
P = A · cos '
e
Q = A · sin '
(2.10)
In Figura 2.8 e Figura 2.9 sono riportati i grafici riassuntivi delle grandezze presentate.
2.5
Impedenza
Il concetto di impedenza generalizza la legge di Ohm estendendola ai circuiti funzionanti in
regime sinusoidale (comunemente detto corrente alternata): in regime di corrente continua
rappresenta infatti la resistenza elettrica.
Essa tiene conto dei fenomeni di consumo di energia elettrica e dei fenomeni di accumulo di
energia elettromagnetica. L’impedenza è descritta matematicamente da un numero complesso,
la cui parte reale rappresenta il fenomeno dissipativo e corrisponde alla resistenza, R; la parte
immaginaria, detta reattanza, X, è associata ai fenomeni energetici di accumulo.
Impedenza = Resistenza + Reattanza
(2.11)
Indicando con v ed i la tensione e la corrente in regime sinusoidale, l’impedenza è esprimibile
come:
32
2.5. IMPEDENZA
Figura 2.8: Tensione, corrente, potenza istantanea, potenza attiva e potenza apparente nel caso di v
e i in fase
Figura 2.9: Tensione, corrente, potenza istantanea, potenza attiva e potenza apparente nel caso di v
e i sfasate
33
Capitolo 2. REGIME ALTERNATO SINUSOIDALE
p
v
= Z = R2 + X 2
i
(2.12)
Per un bipolo passivo la resistenza è un numero sempre positivo, la reattanza può essere positiva
o negativa: nel primo caso prevale l’accumulo di energia magnetica (impedenza induttiva), nel
secondo quello di energia elettrostatica (impedenza capacitiva). Riassumendo si ha:
X > 0 ! impedenza induttiva
X < 0 ! impedenza capacitiva
X = wL
(2.13)
1
wC
(2.14)
X=
dove
w =2·⇡·f
2.6
frequenza f =
1
T
(2.15)
Collegamenti stella e triangolo
Oltre ai già noti collegamenti serie e parallelo, in elettrotecnica esistono altri due tipi di collegamenti denominati stella e triangolo.
Le trasformazioni stella-triangolo o triangolo-stella sono molto utilizzate nel campo dell’elettrotecnica per poter più agevolmente risolvere circuiti con bipoli passivi.
Le configurazioni di stella (indicata tipicamente con Y) e triangolo (indicata con
) sono
rappresentate in Figura 2.10 e in Figura 2.11.
Figura 2.10: Configurazione di stella (circuito di sinistra) e triangolo (circuito di destra)
34
2.6. COLLEGAMENTI STELLA E TRIANGOLO
Figura 2.11: Schema di connessione a stella (circuito di sinistra) e triangolo (circuito di destra)
2.6.1
Passaggio da triangolo a stella e da stella a tringolo
Come esistono formule che ci permettono di calcolare agevolmente l’equivalente serie o parallelo
di un insieme di impedenze, altrettanto si può fare per il passaggio da stella a triangolo e
viceversa.
Triangolo-Stella ( -Y)
Za =
Zab Zca
Zab + Zbc + Zac
(2.16)
Zb =
Zab Zbc
Zab + Zbc + Zac
(2.17)
Zc =
Zbc Zca
Zab + Zbc + Zac
(2.18)
Zab =
Za Zb + Zb Zc + Zc Z a
Zc
(2.19)
Zbc =
Za Zb + Zb Zc + Zc Za
Za
(2.20)
Zca =
Z a Zb + Zb Zc + Zc Za
Zb
(2.21)
Stella-Triangolo (Y- )
35
Capitolo
3
La distribuzione dell’energia elettrica italiana
3.1
Introduzione
La distribuzione elettrica è l’ultima fase
nel processo di consegna dell’elettricità all’utente finale dopo la produzione e la trasmissione.
Generalmente comprende linee elettriche
ad alta tensione (tra i 60 e 150 [kV ]), linee a
media tensione (tra i 5 e i 25 [kV ]) e linee a
bassa tensione (inferiore a 1000 [V ], normalmente 400 [V ]), impianti di trasformazione
AT/MT (cabine primarie), trasformatori su
pali o cabine elettriche a media tensione (cabine secondarie), sezionatori ed interruttori,
strumenti di misura.
A partire dagli anni ’60 la consegna e la distribuzione dell’energia elettrica in Italia veniva svolta in regime di monopolio dall’ENEL; negli anni ’90 il settore è stato proFigura 3.1: Traliccio dell’alta tensione
gressivamente liberalizzato (decreto n 79 del
1999), e attualmente diverse aziende tra cui
società private e municipalizzate svolgono il
servizio producendo in proprio l’energia o acquistandola da produttori e trasportatori.
3.2. SISTEMI DI DISTRIBUZIONE
3.2
Sistemi di distribuzione
Nell’era pionieristica dell’elettricità la produzione era effettuata in corrente continua e la consegna avveniva entro brevi distanze alla stessa tensione. Oggigiorno è utilizzata pressoché ovunque
la corrente alternata con il sistema trifase, che permette il funzionamento dei trasformatori e
quindi la trasmissione e distribuzione a notevole distanza.
Gli elettrodotti portano l’energia ad altissima tensione (tra i 220 e i 380 [kV ]) dalle centrali
elettriche fino alle stazioni ricevitrici alle porte delle città o dei distretti di distribuzione. Qui
enormi autotrasformatori (con potenze che vanno dai 100 ai 400 [MW ]) riducono la tensione
secondo le esigenze della distribuzione primaria, con tensioni che possono essere di 150, 132 o 60
[kV ]; attraverso elettrodotti aerei o in cavo (con isolamento ad olio o in gomma etilenpropilenica
EPR) l’energia elettrica giunge negli impianti di trasformazione AT/MT (alta tensione / media
tensione), denominati cabine primarie, dove, con trasformatori di potenza compresa tra i 10
e i 60 [MW ], viene ulteriormente abbassata ad una tensione che, a seconda dei distributori,
può variare tra gli 8.4 [kV ] (come nella rete di Roma) e i 20 [kV ], per essere immessa poi
nella rete elettrica a media tensione. L’elettricità prosegue su elettrodotti minori su tralicci e
pali in aree di campagna, oppure in cavi isolati nel sottosuolo urbano, fino alle sottostazioni
di media tensione (cabine secondarie). Nelle cabine secondarie di media tensione (MT) altri
trasformatori (con potenze comprese tra 50 e 1000 [kW ]) riducono la tensione al valore finale
di consegna all’utente, in Italia 400 [V ] trifase. Da questo punto fino al contatore dell’utente
si può parlare di consegna di energia elettrica, la quale avviene utilizzando cavi isolati e, più
raramente e nel caso di località rurali, su linee aeree su palo.
Gli avvolgimenti primari e secondari del trasformatore di consegna possono essere configurati
a stella o a triangolo. (Nota: esiste anche il collegamento a zig-zag che sebbene permetta di
unire i vantaggi degli altri due è caduto in disuso per ragioni economiche)
Le combinazioni possibili sono quattro:
• triangolo-triangolo;
• triangolo-stella;
• stella-stella;
• stella-triangolo.
Il sistema più usato nel mondo ed anche in Italia è il triangolo-stella. In questa configurazione il centro stella del secondario, chiamato neutro, viene consegnato alle abitazioni assieme
ad una delle tre fasi (sistema monofase). In un sistema trifase a 400 [V ], la tensione presente
tra fase e neutro è di 230 [V ]. Agli utilizzatori maggiori (laboratori, industrie, ecc...) vengono
consegnate tutte e tre le fasi più il neutro.
37
Capitolo 3. LA DISTRIBUZIONE DELL’ENERGIA ELETTRICA ITALIANA
In alcune zone del mondo ed anche in poche zone d’Italia viene usata una distribuzione
bifase: nelle case vengono portate due fasi di un sistema trifase con tensione fase-fase di 220 [V ].
In questo caso la tensione fase-neutro è di 127 [V ], e in alcune nazioni sono messe a disposizione
entrambe le tensioni su prese differenti. La tensione minore è usata per l’illuminazione, mentre
la maggiore è impiegata per alimentare grossi carichi come lavatrici e condizionatori.
3.3
Schema di distribuzione
Per quando riguarda lo schema della rete di distribuzione essa può essere principalmente di tre
tipi:
• radiale;
• a maglia (o ad anello);
• mista.
3.4
Messa a terra
In cabina di trasformazione il punto del neutro dell’avvolgimento BT del trasformatore MT/BT
è messo a terra, ovvero collegato con un picchetto (dispersore) infisso nel terreno. Per ridurre
la resistenza di contatto la stessa cosa è ripetuta in più punti lungo la linea di consegna.
L’impianto elettrico privato è solitamente messo a terra attraverso un proprio impianto e con
un proprio dispersore. In questo modo in caso di guasto verso terra di un apparecchio, si crea
una corrente di ritorno attraverso la terra che provoca lo scatto degli interruttori magnetotermici
o differenziali di protezione. Questo sistema è detto Terra-Terra (TT), poiché la corrente di
guasto ritorna al neutro attraverso la terra.
3.5
Contabilizzazione
La consegna a 230/400 [V ] avviene attraverso un contatore di energia, che ha gli scopi di contabilizzare i consumi per la fatturazione, definire il punto di consegna e offrire una prima protezione contro sovraccarichi e cortocircuiti grazie a un interruttore magnetotermico integrato.
Lo strumento è essenzialmente un wattmetro integratore elettromeccanico o, negli apparecchi
recenti, elettronico, in grado di totalizzare l’energia attiva (potenza attiva integrata nel tempo) consumata. Nelle consegne trifase rilevanti, viene contabilizzata a parte anche l’energia
reattiva, sulla quale è applicata una sovrattassa, in quanto dannosa per l’ente erogatore.
38
3.6. MISURATORE ELETTRONICO
3.6
Misuratore elettronico
I nuovi misuratori elettronici sono in corso di installazione presso gli utenti finali in tutta
Italia, sulla spinta della flessibilità tariffaria propugnata dall’AEEG1 . Permettono la misura
della potenza attiva e reattiva in ingresso ed in uscita, quindi l’utente può FORNIRE energia al fornitore, incentivando l’autoproduzione e l’uso delle fonti rinnovabili (in particolare gli
impianti fotovoltaici). Inoltre permette di applicare tariffe diversificate per fasce orarie, incentivando l’uso delle ore vuote, e riflettendo giustamente il valore dell’energia elettrica sulla borsa
dell’energia.
Il misuratore elettronico fornisce i seguenti dati:
• Ora corrente e valore di potenza contrattuale disponibile [kW ];
• A + = Totalizzatore energia attiva assorbita [kWh] (ciò che si paga);
• A - = Totalizzatore energia attiva ceduta [kWh] (ciò che viene pagato);
• RQ1 = Energia reattiva induttiva assorbita [kVARh];
• RQ2 = Energia reattiva capacitiva prodotta [kVARh];
• RQ3 = Energia reattiva induttiva prodotta [kVARh];
• RQ4 = Energia reattiva capacitiva assorbita [kVARh];
• A+(T1), (T2), (T3) e (T4) = Totalizzatore energia attiva assorbita in 4 diverse fasce
orarie.
3.7
Caratteristiche di fornitura
Le caratteristiche tecniche dell’elettricità consegnata al cliente sono stabilite dalla normativa
elettrica e sono principalmente determinate da:
• Configurazione delle fasi: monofase, bifase o trifase;
• Tensione nominale: in Italia 400 [V ] fase-fase, ovvero 230 [V ] fase-neutro con tolleranza
1
±10%;
L’Autorità per l’energia elettrica e il gas (AEEG): è un’autorità indipendente che, come l’Autorità
per le garanzie nelle comunicazioni, ha lo scopo di favorire lo sviluppo di un mercato concorrenziale nel settore
energetico, in seguito alla sua privatizzazione.
L’Autorità è un istituto nato in seguito alla decisione dell’Unione Europea di liberalizzare il settore dell’energia,
sostituendo di fatto i monopoli presenti nella maggior parte dei paesi aderenti alla comunità.
39
Capitolo 3. LA DISTRIBUZIONE DELL’ENERGIA ELETTRICA ITALIANA
• Frequenza: 50 [Hz ];
• Corrente nominale massima (dipendente dal contratto di fornitura);
• Massimo sfasamento ammesso dall’ente erogatore;
• Configurazione di terra: TT, TN, TN-S, TN-C o TN-C-S;
• Corrente massima di cortocircuito (negli impianti domestici è limitata dall’interruttore
automatico abbinato al contatore);
• Massimo livello e frequenza dei transienti, delle sovratensioni temporanee e delle microinterruzioni;
• Continuità del servizio, garanzie contro i black-out.
40
Capitolo
4
Trasformatore
Definizione 4.1 (Trasformatore). Il trasformatore è una macchina elettrica statica (perché
non contiene parti in movimento) appartenente alla categoria più ampia dei convertitori.
In particolare il trasformatore consente di
convertire i parametri di tensione e corrente in ingresso rispetto a quelli in uscita, pur
mantenendo costante la quantità di potenza elettrica (a meno delle perdite per effetto
dell’isteresi e delle correnti parassite). Il trasformatore è una macchina in grado di ope-
Figura 4.1: Trasformatore: simbolo circuitale
rare solo in corrente alternata, perché sfrutta
i principi dell’elettromagnetismo legati ai flussi variabili.
Il trasformatore ha importanza fondamentale nel mondo di oggi: senza di esso le grandi reti
di trasporto dell’energia elettrica che collegano le centrali elettriche a milioni di industrie e di
case non potrebbero funzionare.
4.1
Introduzione
Le enormi quantità di energia elettrica richieste dalla società moderna fanno sì che questa debba
essere prodotta in grandi quantità presso centri di produzione denominati centrali elettriche.
Un parametro utile per determinare la dimensione e la quantità di energia prodotta da una
centrale è la potenza la quale può variare dalle decine di [kW ] (1 [kW ] = 1000 [W ]) di piccole
centrali idroelettriche o solari alle centinaia di [MW ] (1 [MW ] = 1.000.000 [W ]) delle grandi
centrali termoelettriche e nucleari. Questa energia deve essere trasportata anche per centinaia
Capitolo 4. TRASFORMATORE
di [km]. La potenza elettrica è legata in maniera diretta ai parametri di tensione e corrente,
secondo la formula
P = VEF F · IEF F · cos '
(4.1)
dove cos ', detto fattore di potenza, è il
correttivo dovuto allo sfasamento.
Ciò significa che a parità di potenza aumentando la tensione v diminuisce la corrente i (e
si deve mantenere cos ', più vicino possibile
al valore unitario. Ciò è molto importante in
quanto la corrente i genera al suo passaggio
nei conduttori elettrici calore (Effetto Joule),
più la corrente è alta e più calore si genera;
per ovviare a questo bisogna aumentare la sezione dei conduttori, ma viene da sé che c’è un
limite economico e tecnologico nel dimensionamento delle linee elettriche, legato anche al
fenomeno della caduta di tensione delle linee
stesse. Al fine quindi di abbassare la corrente
i si effettua una trasformazione aumentando
la tensione v a parità di potenza P . Naturalmente diminuendo le distanze da percorrere
e la potenza da trasportare viene anche meno l’esigenza di avere tensioni alte, se a queFigura 4.2: Trasformatore di media tensione su
palo in una zona rurale. Alla sommità del palo si
vede l’arrivo dei tre fili della media tensione con
isolatori in vetro,appena sotto si vedono gli scaricatori per le sovratensioni di origine atmosferica,
alla cui altezza partono anche due cavi di uscita
verso le utenze in bassa tensione. A sinistra sopra il trasformatore è visibile il serbatoio dell’olio
di raffreddamento
sto si associa l’altra esigenza che è quella di
avere per l’uso domestico e industriale un livello di tensione compatibile con le esigenze
di sicurezza ne conviene che dalla produzione alla distribuzione è opportuno effettuare
un numero adeguato di trasformazioni verso
tensioni più basse.
La macchina che si occupa di effettuare tali
trasformazioni è appunto il trasformatore. A
titolo di esempio cito alcune delle tensioni tipiche di esercizio degli impianti elettrici ovvero:
• 230 [V ] - tensione per usi domestici;
• 400 [V ] - tensione per uso industriale;
42
4.2. INVENZIONE
• 15/20 [kV ] (15.000 ÷ 20.000 [V ]) tensione di esercizio delle reti elettriche di distribuzione
secondaria (lunghezza alcune decine di [km]);
• 132/150/220/380 [kV ] tensione di esercizio delle linee elettriche di distribuzione primaria
(lunghezza alcune centinaia di [km]);
• 0,5/1 [MV ] tensione di esercizio delle linee elettriche di interconnessione su lunghissime
percorrenze (lunghezza alcune migliaia di [km]).
4.2
Invenzione
Fra le principali tappe che hanno portato all’attuale trasformatore ricordo:
• Michael Faraday inventò il 29 agosto 1831 l’anello a induzione, il primo trasformatore.
Egli lo usò però solamente per dimostrare i principi dell’induzione elettromagnetica e non
ne intravide un uso pratico.
• Lucien Gaulard e John Dixon Gibbs presentarono a Londra nel 1881 un dispositivo
chiamato generatore secondario e vendettero l’idea alla società americana Westinghouse.
Fu il primo trasformatore di uso pratico, ma impiegava un nucleo lineare, abbandonato
poi in favore del nucleo circolare. Fu anche presentato a Torino nel 1884, dove fu adottato
per un sistema di illuminazione.
• William Stanley, un ingegnere della Westinghouse, costruì un modello di trasformatore
nel 1885 dopo che George Westinghouse acquistò l’invenzione di Gaulard e Gibbs. Egli
utilizzò per il nucleo due ferri sagomati a forma di E ed il modello entrò in commercio
nel 1886.
• Ottó Bláthy, Miksa Déri e Károly Zipernowsky, ingegneri ungheresi della società
Ganz di Budapest svilupparono nel 1885 un efficiente modello “ZBD” basato sul progetto
di Gaulard e Gibbs.
• Nikola Tesla nel 1891 inventò la bobina di Tesla, un trasformatore risonante con
avvolgimenti sintonizzati in aria per produrre altissime tensioni ad alta frequenza.
4.3
Costruzione e principio di funzionamento
Il trasformatore più semplice è costituito da due conduttori elettrici (solenoidi) avvolti su un
anello di materiale ferromagnetico detto nucleo magnetico. L’avvolgimento al quale viene for43
Capitolo 4. TRASFORMATORE
Figura 4.3: Schema di principio
nita energia viene detto primario, mentre quello dalla quale l’energia è prelevata è detto secondario. I trasformatori sono macchine reversibili, per cui questa classificazione non corrisponde
ad un avvolgimento fisico unico.
Quando sul primario viene applicata una tensione elettrica alternata sinusoidale, per effetto
dell’induzione magnetica si crea nel nucleo un flusso magnetico con andamento sinusoidale. Per
la legge di Faraday-Neumann-Lenz, questo flusso variabile induce nel secondario una tensione
sinusoidale.
La tensione prodotta nel secondario è proporzionale al rapporto tra il numero di spire del
primario e quelle del secondario secondo la relazione:
V1
N1
=
= k0
V2
N2
(4.2)
dove V1 è la tensione applicata sul primario, V2 la tensione indotta sul secondario, N1 il numero di spire del primario e N2 il numero di spire del secondario, k0 è chiamato rapporto di
trasformazione.
44
4.4. DAL TRASFORMATORE IDEALE AL REALE
4.4
Dal trasformatore ideale al reale
Figura 4.4: Trasformatore ideale
Per il trasformatore ideale in Figura 4.4 si assume la convenzione degli utilizzatori alla porta
1 (primario) e la convenzione dei generatori alla porta 2 (secondario). Questo è governato dalle
equazioni simboliche:
V 1 = k0 · V 2
V2 =
1
· V1
k0
(4.3)
I 2 = k0 · I 1
I1 =
1
· I2
k0
(4.4)
dove k0 è il rapporto di trasformazione.
Un trasformatore reale approssima quello ideale quando:
• la riluttanza del nucleo è nulla (cioè, la permeabilità del nucleo è infinita);
• le perdite nel nucleo sono nulle (cioè, le perdite nel ferro per correnti parassite e isteresi
magnetica);
• gli avvolgimenti hanno accoppiamento perfetto (assenza dei flussi dispersi);
• le resistenze degli avvolgimenti sono nulle (assenza delle perdite per effetto Joule).
4.4.1
Riluttanza del nucleo non nulla
Per rendere conto della permeanza finita del nucleo viene introdotto un induttore al lato
primario di induttanza molto elevata.
45
Capitolo 4. TRASFORMATORE
4.4.2
Perdite nel nucleo non nulle
Essendo le perdite non nulle, in parallelo con l’induttore precedentemente inserito, viene affiancato un resistore con resistenza molto elevata.
4.4.3
Accoppiamento non perfetto tra gli avvolgimenti
L’accoppiamento imperfetto tra gli avvolgimenti è dovuto a linee di flusso che abbandonano il
nucleo per richiudersi attraverso percorsi in aria, si avranno cosi altri 2 flussi:
• flusso di dispersione al primario
• flusso di dispersione al secondario
1d
2d
posso definire:
• reattanza di dispersione a primario X1 = !L1 =
N1 1d
I1
• reattanza di dispersione a secondario X2 = !L2 =
4.4.4
N2 1d
I2
Resistenza degli avvolgimenti non nulle
Considera la resistenza dei conduttori che costituiscono gli avvolgimenti R1 e R2 poste in serie
con le perdite per accoppiamento non perfetto.
46
4.5. IL TRASFORMATORE REALE
4.4.5
Schema completo equivalente
4.5
Il trasformatore reale
Il trasformatore converte la tensione entrante in un valore differente, ma senza aumentare la
potenza. Il prodotto di tensione per corrente tra i due circuiti è uguale:
Vp · Ip = Vs · Is
(4.5)
Un trasformatore reale però non è una macchina perfetta e per questo presenta delle perdite,
ovvero la potenza assorbita dal primario è sempre superiore a quella fornita dal secondario. I
diversi motivi di perdita sono:
• effetto Joule prodotto dalla corrente che scorre negli avvolgimenti (dette perdite nel rame);
• induzione di correnti parassite nel nucleo che possono a loro volta dissipare energia per
effetto Joule (dette perdite nel ferro);
• perdita di flusso magnetico al di fuori del nucleo che può indurre correnti su oggetti vicini
al trasformatore;
• perdite per isteresi magnetica (sono perdite nel ferro);
• perdite per movimenti meccanici dovuti a forze magnetiche o magnetostrizione, solitamente percettibili come il classico ronzio del trasformatore;
Per contrastare questi problemi si adottano avvolgimenti con il minimo numero di spire
possibile, di sezione quadrata o (meglio ancora, dove possibile) circolare per minimizzare la
lunghezza complessiva del filo; i nuclei magnetici devono avere una sezione adeguata, una
lunghezza minore possibile e devono essere costituiti da materiale ferromagnetico che abbia
una resistenza elettrica il più possibile alta, per minimizzare le perdite per effetto Joule, e una
47
Capitolo 4. TRASFORMATORE
forza coercitiva il più possibile bassa, per avere un ciclo di isteresi il più possibile stretto (e
quindi delle perdite magnetiche minori possibili). In genere si adottano nuclei fatti di pacchi
di lamierini di acciaio magnetico al silicio, per ridurre al minimo le correnti parassite.
La forma può essere quella di un toro (trasformatori toroidali) oppure, più comunemente, quadrata o di due rettangoli uniti per un
lato. In questo caso gli avvolgimenti sono posti sul lato comune. Il nucleo non è realizzato
in metallo compatto, ma è costituito da sottili
lamierini incollati a formare pacchetti. Questo ha lo scopo di impedire che nel nucleo
circolino correnti parassite. Nei trasformatori operanti a frequenze elevate, il nucleo è
costituito da polveri metalliche agglomerate
con collanti.
Più un trasformatore è grande, maggiore
è il suo rendimento: i trasformatori di potenza molto piccola (da 1 a 10 [W ]) hanno
una efficienza dell’80% appena, mentre i trasformatori più grandi (oltre i 20 [kW ]) arrivano ad un rendimento del 99,98% circa. Per
queste potenze la potenza dissipata è comunque notevole e perciò sono necessari sistemi di
raffreddamento molto efficienti: trasformato-
Figura 4.5: Trasfomatore trifase a bagno d’olio
privo del contenitore
ri così grandi lavorano in un bagno di olio
dentro involucri metallici opportunamente sagomati per facilitare la dispersione del calore; in
alcuni casi sono previste pompe per la circolazione forzata dell’olio e un sistema di ventilatori esterni per aumentare l’asportazione di calore. La potenza assorbita da queste funzioni
accessorie è considerata tra le perdite.
4.6
Funzionamento a vuoto
Si ha quando non ci sono carichi alimentati dal circuito secondario, quindi I2 = 0 e quindi è
anche nulla anche I12 mentre circola solo corrente nella prima parte del circuito primario quindi
I1 = I10 .
48
4.7. FUNZIONAMENTO IN CORTO CIRCUITO
Ricordando lo schema di trasformatori reali, definisco impedenza a vuoto al primario:
Z10 =
q
2
2
X10
+ R10
(4.6)
Si trascura:
Z10
q
R12 + X12
tipicamente di un fattore 1000
(4.7)
La resistenza e l’induttanza al secondario non sono attraversate da corrente quindi vengono
sostituite con un corto circuito.
Si ottiene così lo schema di funzionamento a vuoto sopra riportato.
Questo schema ci da un’idea delle perdite nel ferro perché legate all’impedenza Z10 e quindi
della relativa perdita di potenza che ci sarà utile per il calcolo del rendimento del trasformatore.
4.7
Funzionamento in corto circuito
Si ha una configurazione di corto circuito quando si sostituisce il carico con un corto circuito:
in questo caso si annullerà la tensione V2 = 0 e le correnti vengono chiamate correnti di cortocircuito (la tensione V1 dovrà essere opportunamente ridotta per non generare correnti che
guastino il trasformatore):
I1 = I1CC
I2 = I2CC
(4.8)
Per l’analisi del trasformatore in corto circuito, partendo dalla configurazione di trasformatore
reale, si riportano al primario la resistenza e l’induttanza del secondario, mettendole in parallelo
con Z10 e in serie con R1 e X1
49
Capitolo 4. TRASFORMATORE
R12 = n2 · R2
X12 = n2 · X2
(4.9)
Adesso prendiamo in considerazione la prima parte dello schema proposto e definiamo l’impedenza al primario:
Z1C
q
2
2
= R1C
+ X1C
(4.10)
dove:
• R1C è definita resistenza in corto circuito a primario
• X1C è definita reattanza in corto circuito a primario
• le resistenze e le induttanze del primario sono considerate in serie:
R1C = R1 + R12
• ricordo che Z10
X1C = X1 + X12
(4.11)
p
R12 + X12 tipicamente di un fattore 1000 e quindi viene trascurata.
Considerando la parte di destra dello schema, possiamo trasportare l’impedenza del primario
al secondario e ottenere:
Z2C
q
2
2
= R2C
+ X2C
(4.12)
dove:
• R2C è definita resistenza in corto circuito a secondario
• X2C è definita reattanza in corto circuito a secondario
R2C =
R1C
n2
X2C =
X1C
n2
(4.13)
In conclusione il funzionamento in corto circuito è dipendente dalle impedenze al primario e al
secondario Z1C , Z2C , quindi la potenza assorbita dal trasformatore in corto circuito è legata
alle perdite dovute alle resistenze quindi alle perdite nel rame; questa considerazione ci sarà
utile per il calcolo del rendimento del trasformatore.
50
4.8. PROVE SUL TRASFORMATORE
4.8
Prove sul Trasformatore
4.8.1
Prova a vuoto
La prova a vuoto serve per determinare i componenti del circuito equivalente del ramo magnetizzante (trasversali), visti dal lato primario, le perdite nel ferro dovute al nucleo ferromagnetico
e la caratteristica a vuoto della macchina.
Pf =
V12
R10
(4.14)
Lo schema prevede l’utilizzo dei seguenti strumenti da collegare al primario:
• un frequenzimetro, per controllare che la frequenza sia sempre quella nominale;
• un variac, per regolare la tensione per ogni lettura da svolgere;
• un amperometro;
• un voltmetro;
• un wattmetro.
La prova viene svolta nel seguente modo:
• viene alimentato il trasformatore alla frequenza nominale e con una tensione leggermente
superiore alla tensione nominale: ad esempio 1, 1 · V2n ,
• tramite un variac o (autotrasformatore) viene abbassata gradualmente la tensione di
alimentazione fino al valore 0, effettuando per ogni tensione diverse letture di corrente e
potenza, riportando il tutto in una tabella;
• con i dati ricavati è possibile costruire dei grafici e determinare graficamente il valore della
Pf
I grafici sono:
• I20 = f (V2 ),
• P0 = f (V2 ),
• cos '0 = f (V2 ).
Dai grafici è possbile determinarsi i valori nominali di corrente, potenza e cos ' (tutti riferiti al
funzionamento a vuoto) in corrispondenza del valore della tensione nominale di funzionamento.
In particolare: il valore di potenza nominale a vuoto ricavato dal grafico è proprio il valore di
Pf .
51
Capitolo 4. TRASFORMATORE
4.9
Perdite e rendimento
I trasformatori reali presentato due tipi di perdite:
• perdite nel rame dovute all’effetto Joule che si manifesta negli avvolgimenti percorsi da
corrente:
PCu = R1C · I12 + R2C · I22
(4.15)
• perdite nel ferro dovute al nucleo ferromagnetico (perdite per isteresi e correnti parassite):
PF e =
V12
R10
(4.16)
quindi definiamo il rendimento:
⌘=
Pu
PCu + PF e + Pu
(4.17)
dove:
• Pu potenza utile al secondario
• Pd potenza disponibile al primario
Da ricordare che il rendimento è funzione della condizione di carico, ossia di quanto sia sfasata
la corrente al secondario.
4.10
Configurazione in parallelo
Porre due trasformatori in parallelo è giustificato da queste esigenze:
• variabilità del carico: non sarà sempre richiesta la potenza nominale di progetto sulla
rete (es: esigenze domestiche o industriali sono variabili a seconda delle ore della giornata)
così da abbassare sensibilmente il rendimento del trasformatore quando questo lavori
lontano dalle condizioni di progetto;
• sicurezza: nel caso di guasto di uno dei due trasformatori non risulta compromessa del
tutto l’erogazione della rete (black out);
• manutenzione: si possono effettuare operazioni di manutenzione sui trasformatori di-
sattivandoli alternativamente senza dover interrompere completamente l’erogazione del
servizio.
52
4.11. VALORI NOMINALI DEI TRASFORMATORI
4.11
Valori nominali dei trasformatori
• V1n tensione nominale primaria [V ];
• V2n tensione nominale secondaria [V ];
• I2n corrente nominale primaria [A];
• I2n corrente nominale secondaria ([A];
• Pn potenza nominale [VA];
• fn frequenza nominale [Hz ];
• n rapporto di trasformazione.
Tra i valori nominali di tensione e corrente sussistono le relazioni:
V1n
=n
V2n
I1n
1
=
I2n
n
(4.18)
La potenza nominale è legata alle tensioni e correnti nominali dalle relazioni:
Pn = V1n · I1n = V2n · I2n
Pn =
4.12
p
3 · V1n · I1n =
p
3 · V2n · I2n
per il monofase
per il trifase
(4.19)
(4.20)
Tipi
Sebbene basati sullo stesso principio, esistono trasformatori di tutte le dimensioni, da quelli
grandi pochi millimetri usati in elettronica a grandi macchine alte diversi metri e con potenze
di gigawatt usati nella distribuzione di energia elettrica.
La classificazione può essere fatta in base alla potenza trasferita, al rapporto di trasformazione, al fatto che primario e secondari siano isolati, al tipo di segnale su cui operano.
4.12.1
Di tensione (TV)
È il trasformatore classico descritto precedentemente. La tensione sul secondario è costante e
determinata dal rapporto nel numero di spire. Si può ulteriormente suddividere questa categoria in trasformatori riduttori o elevatori a seconda che il rapporto di tensione sia in aumento o in
diminuzione. Gli avvolgimenti possono avere prese intermedie che permettono di decidere all’installazione tra diversi rapporti, per esempio per utilizzare una apparecchiatura su reti elettriche
53
Capitolo 4. TRASFORMATORE
a diversa tensione nominale. Le prese intermedie sul secondario, oppure avvolgimenti secondari
aggiuntivi, permettono di avere a disposizione diversi valori di tensione contemporaneamente.
4.12.2
Di isolamento
Sono trasformatori con rapporto unitario
(o leggermente maggiore per compensare le
perdite) ma con isolamento elettrico tra gli
avvolgimenti particolarmente curato. Sono
usati per disaccoppiare la massa di un apparecchio di misura dalla massa del circuito
in esame quando entrambi siano messi a terra. La separazione tra gli avvolgimenti viene generalmente assicurata mediante doppio
isolamento oppure per mezzo di uno schermo
metallico messo a terra.
Possono essere anche usati per aumentare la sicurezza delle apparecchiature mediche
connesse alla rete, ma in questo caso il trasformatore deve essere conforme anche alla
norma IEC 65558-2-15, specifica per l’applicazione in locali adibiti ad uso medico. Tra le
caratteristiche peculiari, la potenza di uscita
Figura 4.6: Un trasformatore raffreddato ad olio
non può superare 10 [kVA] e, se viene utilizza-
con primario a 10 [kV] e secondario a 220 [V],
to per alimentare più di un apparecchio medi-
risalente agli anni sessanta
cale contemporaneamente, deve essere dotato di un dispositivo di controllo permanente
dell’isolamento non disinseribile.
4.12.3
Trasformatore trifase
Sono macchine in grado di convertire una tensione trifase e sono comunemente usati nella rete
di distribuzione elettrica. Possono essere costituiti da tre trasformatori monofasi indipendenti,
ma spesso sono realizzati con tre avvolgimenti primari e tre secondari montati su un unico
nucleo con tre rami paralleli. Gli avvolgimenti possono essere collegati a stella (sigla Y per
alta tensione - sigla y per bassa tensione), a triangolo (sigla D per alta tensione - sigla d per
bassa tensione) o a zig-zag (sigla Z per alta tensione - sigla z per bassa tensione). Vengono di
54
4.12. TIPI
solito abbinati a degli Isoltester o chiamati anche Controllori di isolamento che permettono di
regolare tramite pannello sinottico le varie soglie di resistenza verso terra. Nel caso si debbano
mettere in parallelo due o più trasformatori trifase bisogna, preventivamente, accertarsi che
appartengano antrambi al medesimo gruppo. Il gruppo di un trasformatore trifase si definisce
come l’angolo di ritardo della bassa tensione rispetto all’alta tensione assumendo come senso
antiorario in senso di rotazione dei vettori di tensioni. Solo in questo caso siamo certi di non collegare in cortocircuito i due trasformatori che vogliamo mettere in parallelo. Nei trasformatori
commerciali i gruppi più utilizzati sono quattro:
• gruppo 0 (nessun sfasamento tra primario e secondario);
• gruppo 5 (sfasamento di 150 tra primario e secondario);
• gruppo 6 (sfasamento di 180 tra primario e secondario);
• gruppo 11 (sfasamento di 330 tra primario e secondario);
Questo angolo di ritardo è dovuto al diverso montaggio degli avvolgimenti del trasformatore.
Per fare un semplice esempio se gli avvolgimenti sono stati collegati a stella (sia del primario
che del secondario) possiamo avere un trasformatore sia con gruppo 0 sia con gruppo 6. Nel
caso uno dei due sia collegato a triangolo e l’altro a stella possiamo avere un trasformatore sia
con gruppo 5 sia con gruppo 11.
4.12.4
Autotrasformatore
L’autotrasformatore è un particolare tipo di trasformatore costituito da un unico avvolgimento
dotato di prese intermedie. Avere un solo avvolgimento semplifica molto la costruzione dell’autotrasformatore, riduce di molto le perdite ohmiche dovute alla resistenza dei conduttori
ed elimina i problemi di isolamento fra avvolgimenti. D’altro canto, al contrario del normale
trasformatore, primario e secondario non sono isolati.
In un autotrasformatore la corrente che fluisce nel primario crea un flusso magnetico che
induce una corrente di verso opposto nel secondario, come nel normale trasformatore: ma
poiché in questo caso il secondario è parte del primario le due correnti si sottraggono, con il
risultato che in parte dell’avvolgimento scorre una corrente molto più bassa di quella assorbita
ed erogata. Il rapporto tra le correnti è pari al rapporto tra il numero di spire degli avvolgimenti.
55
Capitolo 4. TRASFORMATORE
4.12.5
Trasformatore variabile o variac
Sono autotrasformatori in cui la presa intermedia è un contatto strisciante sull’avvolgimento
primario: questi apparecchi possono fornire in uscita una tensione regolabile praticamente con
continuità tra zero e il valore massimo. Il Variac è un marchio registrato da General Radio.
4.12.6
Di corrente (TA)
Forniscono sul secondario una corrente proporzionale alla corrente circolante nel primario. Sono
spesso usati nei sistemi di misura per correnti elevate al fine di ridurle a valori più facilmente
misurabili. Sono costituiti da un nucleo toroidale al cui interno passa il cavo (anche isolato) su
cui compiere la misura e su cui è avvolto il filo del secondario. È importante che il secondario
sia sempre in cortocircuito sullo strumento di misura per evitare la formazione di tensioni
pericolosamente elevate. Sono usati nei sensori di una pinza amperometrica.
4.12.7
A corrente costante
Questi trasformatori mantengono costante entro certi limiti la corrente fornita sul secondario piuttosto che la tensione. In pratica la tensione prodotta si regola automaticamente per mantenere una corrente costante
sul carico. Sono costituiti da nucleo interrotto da un traferro la cui apertura è regolata
da una sezione mobile del nucleo tirata da
un contrappeso. La presenza del traferro determina un aumento della riluttanza, ovvero
il rapporto tra la forza magnetomotrice generata dal primario e il flusso di induzione
prodotto nel nucleo.
Quando il circuito secondario assorbe troppa corrente, le forze elettromagnetiche provocano l’allargamento del traferro, da cui ne
deriva una diminuzione del flusso e quindi la
diminuzione della tensione indotta.
Questi trasformatori sono usati per alimentare le lampade di illuminazione pubblica
collegate in serie a corrente costante.
56
Figura 4.7: Trasformatore variabile
4.12. TIPI
Versioni con traferro regolabile manualmente sono usati nelle saldatrici elettriche: in questo
caso l’apertura del traferro non è automatica ma impostata dall’utilizzatore con una manopola.
La corrente è quindi limitata ad un valore prefissato ma non regolata.
4.12.8
Risonante
Un trasformatore risonante opera alla frequenza di risonanza di uno (o più) avvolgimenti, solitamente il secondario, sfruttando la capacità parassita fra una spira e l’altra dell’avvolgimento.
Se il primario è alimentato con una tensione periodica ad onde quadre o dente di sega, ad ogni
impulso viene fornita energia sul secondario, che sviluppa progressivamente una tensione molto
elevata alla frequenza di risonanza del circuito oscillante. La tensione prodotta è limitata da
fenomeni di scarica distruttiva fra le spire dell’avvolgimento risonante e la corrente è molto più
elevata di quella ottenuta dai generatori elettrostatici come il Generatore Van de Graaff e il
Generatore Wimshurst. Di solito questi trasformatori lavorano a frequenze piuttosto elevate,
per cui non hanno bisogno di nucleo magnetico. La bobina di Tesla è un tipico trasformatore
risonante.
4.12.9
Di impulso
Un trasformatore di impulso è ottimizzato per trasferire un impulso rettangolare. Modelli
di piccola potenza (detti di segnale) sono usati in elettronica digitale e telecomunicazioni, in
genere per adattare i circuiti alle linee di trasmissione e per attivare triac o scr. Modelli di medie
dimensioni sono usati per controlli su circuiti di potenza, come per esempio per innescare i flash
fotografici.
Per limitare la distorsione nella forma dell’impulso, il trasformatore deve avere basse perdite,
bassa capacità distribuita ed alta induttanza a circuito aperto. Nei modelli di potenza deve
essere bassa la capacità di accoppiamento tra primario e secondario, per proteggere i circuiti
collegati al primario dagli impulsi di elevata tensione creati dal carico. Per la stessa ragione
deve essere elevato l’isolamento.
La qualità di un trasformatore di impulso è determinabile con il prodotto tra la tensione di
picco e la durata dell’impulso (o più esattamente l’integrale dell’impulso). Più alto è il valore,
maggiore è il costo del trasformatore.
4.12.10
D’uscita
Questo tipo di trasformatore è utilizzato solitamente come adattatore d’impedenza. Normalmente è usato negli amplificatori audio valvolari per adattare l’alta impedenza dei tubi d’uscita
con la bassa impedenza dell’altoparlante. Infatti, solitamente, per questo tipo di trasformatori
57
Capitolo 4. TRASFORMATORE
non viene definito direttamente il rapporto di trasformazione N delle tensioni ma il rapporto
delle impedenze tra primario e secondario. Dal punto di vista matematico risulta che:
Z1
= N2
Z2
(4.21)
con Z1 e Z2 le impedenze del primario e del secondario. Inoltre, in questa specifica applicazione,
svolge anche il compito di separare la componente continua da quella alternata. Dal punto di
vista costruttivo è come un normale trasformatore monofase con degli accorgimenti particolari.
Prima di tutto il materiale dei lamierini: si usano solitamente lamierini con percentuale di silicio,
però a grani orientati, oppure altri materiali più costosi (permalloy, etc.). Un altro accorgimento
che si pratica è quello di intercalare il primario con il secondario, in modo tale da aumentare
l’accoppiamento tra gli avvolgimenti e diminuire la capacità parassita (e quindi estendere la
banda passante) degli avvolgimenti. Nei trasformatori d’uscita per stadi single end occorre
aggiungere del traferro (aria o carta) al nucleo in modo tale da evitare premature saturazioni,
visto che in questa configurazione l’avvolgimento primario è attraversato dalla corrente continua
del tubo in un solo senso e non in due (ma opposti) come in quelli per push-pull, i quali non
richiedono il traferro. In un amplificatore audio è un componente fondamentale, in quanto se
di scarsa qualità può limitare pesantemente le prestazioni.
4.12.11
Rotante
Un trasformatore rotante è un tipo specializzato di trasformatore, usato per accoppiare segnali elettrici tra due parti rotanti
tra di loro. un trasformatore rotante permette di superare i difetti tipici degli anelli
collettori, come attrito, frizione, intermittenza del contatto e limitazione della velocità di
rotazione.
Un trasformatore rotante è costruito con
gli avvolgimenti primari e secondari in metà
Figura 4.8: Parte fissa di un trasformatore rotante
separate, montate poi una di fronte all’altra.
a 6 canali usato in un videoregistratore a 6 testine
La connessione tra le due metà degli avvolgimenti è assicurata dal flusso magnetico che
fornisce l’induttanza reciproca dal primario al secondario.
58
4.13. RICERCA
L’uso più comune dei trasformatori rotanti è nei videoregistratori, per la trasmissione dei
segnali di pilotaggio delle testine video montate su un tamburo rotante. La maggior parte dei
videoregistratori richiede più di un segnale, e in questo caso si usano trasformatori rotanti a
più canali, con più avvolgimenti concentrici. Nella foto si vede un trasformatore rotante con 6
avvolgimenti individuali.
Un altro uso è per trasmettere segnali dai sensori di coppia sui motori elettrici, per controllarne la velocità e la coppia generata tramite feedback.
4.13
Ricerca
Fino al 1965 è stata opinione scientificamente condivisa che il trasformatore in corrente continua fosse impossibile da realizzare, in quell’anno un gruppo di ricercatori della General Electric guidati dal premio Nobel (1973) Ivar Giaever riuscirono nell’impresa, come conseguenza di studi sulla superconduttività a bassa temperatura. L’applicabilità pratica e su larga scala di questa scoperta comunque non è ancora stata conseguita,
gli studi intanto proseguono nel campo della
Figura 4.9: Parte rotante del trasformatore, con
superconduttività ad alta temperatura.
visibili tre delle sei testine
59
Capitolo
5
Sistema trifase
In elettrotecnica con sistema trifase si intende un particolare sistema di produzione,
distribuzione e utilizzazione dell’energia elettrica basato su tre tensioni elettriche alternate aventi la stessa frequenza (isofrequenziali)
e la stessa differenza di fase.
Il sistema trifase è stato inventato da Nikola
Tesla1 .
5.1
Figura 5.1:
Interruttore magnetotermico con
differenziale per sistemi trifase (400 [V])
Diagramma delle fasi
Si può considerare un generatore trifase come costituito da tre generatori singoli di corrente
alternata con la stessa frequenza ma con le fasi traslate di 120 . Se si considera a potenziale
di riferimento zero un terminale di ciascun generatore, la tensione presente ai capi liberi è
schematizzata nel seguente diagramma polare di Figura 5.2.
Si noti come fra i tre assi di un sistema di riferimento può esservi un angolo qualsiasi, non
necessariamente di 90 .
Si possono osservare i fasori corrispondenti alle tre tensioni di fase E1 , E2 ed E3 , misurate
in riferimento al punto centrale N , (che vedremo essere chiamato neutro). La somma vettoriale
delle tensioni è nulla se il sistema è equilibrato2 e simmetrico3 .
1
Nikola Tesla: (Smiljan, 10 luglio 1856 - New York, 7 gennaio 1943) è stato un fisico, inventore e ingegnere
serbo naturalizzato statunitense nel 1891.
2
Equilibrato: l’impedenza su ogni filo di fase è uguale in modulo.
3
Simmetrico: la terna di tensioni è simmetrica, cioè ogni tensione è sfasata dalla precendente di 120
5.2. STELLA E TRIANGOLO
Le tensioni misurate tra i punti A-B, B-C e C-A sono dette tensioni concatenate. In un
sistema equilibrato e simmetrico, la relazione tra tensioni di fase e tensioni concatenate è data
da:
V12 = VF 1
VF 2 =
V23 = VF 2
VF 3 =
V31 = VF 3
VF 1 =
p
p
p
3 · VF
3 · VF
3 · VF
(5.1)
(5.2)
(5.3)
dove VF è il modulo identico per le tre tensioni di fase.
In modulo, si ha:
VC =
p
3 · VF
(5.4)
Le tensioni ufficialmente usate in Italia sono:
230 [V ] per le tensioni linea-neutro e 400 [V ]
Figura 5.2: Diagramma delle fasi di un sistema
trifase isofrequenziale
per le tensioni concatenate.
Come descritto se un sistema è equilibrato
e simmetrico la somma vettoriale delle tensioni è nulla. Conseguentemente, ricordando che
la corrente è
I=
V
Z
(5.5)
anche la somma vettoriale della corrente è
nulla. Questo permette di scrivere un sistema
Figura 5.3: Sistema di trasmissione costituito da
trifase come la somma di tre sistemi monofa-
tre sistemi monofase
se (Figura 5.3) in cui il filo di ritorno è stato
cancellato perché percorso da corrente nulla (Figura 5.4).
5.2
Stella e triangolo
Definendo tensione di linea la tensione misurata tra due linee, nel collegamento a stella la
tensione di linea equivale alla differenza (vettoriale) tra due tensioni di fase, ovvero in modulo,
61
Capitolo 5. SISTEMA TRIFASE
in un sistema equilibrato, pari a
p
3 volte la tensione di fase. Nel collegamento a triangolo la
tensione di linea corrisponde alla tensione di fase. Ogni schema a stella può essere convertito
in uno a triangolo e viceversa.
Il collegamento dei carichi nella pratica
quotidiana, per esempio gli avvolgimenti di
un motore elettrico o di un trasformatore,
può essere effettuato nelle due modalità. In
genere sulle macchine è presente una scatola (morsettiera) in cui è possibile configurare
il circuito per mezzo di ponticelli, in modo
da adattare il funzionamento a tensioni concatenate di 400 [V ] oppure 230 [V ]. In alcuni grossi motori asincroni trifase progettati
per funzionare con gli avvolgimenti collegati a
triangolo (quindi sottoposti alla tensione con-
Figura 5.4: Rete trifase equivalente a quella di
Figura 5.3
catenata) è possibile effettuare l’avviamento
stella.
5.3
Il neutro
Nella configurazione a stella esiste un punto centrale su cui converge un terminale di ciascuna
impedenza. Questo punto è chiamato neutro. Il potenziale elettrico presente sul punto neutro è
la somma vettoriale delle tensioni di fase, che in un sistema equilibrato e simmetrico ha valore
nullo. Se il sistema viene squilibrato o le tensioni diventano asimmetriche, il punto neutro si
sposta dal centro del triangolo. In tale caso le tensioni fase-neutro non saranno uguali tra loro.
Generalmente nelle cabine di distribuzione elettrica il secondario del trasformatore di riduzione è configurato a stella, e il punto neutro viene collegato a terra per mezzo di un dispersore
infisso nel terreno. Inoltre è consegnato all’utente (oltre alle fasi) per mezzo della linea del
neutro.
Lo scopo è quello di permettere il ritorno della differenza di corrente tra le linee di fase nel
caso, peraltro frequentissimo nella distribuzione elettrica pubblica, in cui i carichi presenti non
siano equilibrati. In tale situazione infatti il potenziale del neutro del generatore ed il potenziale
del neutro del carico non corrispondono. Il collegamento di neutro rappresenta un cortocircuito
che tende a uguagliare il potenziale del neutro del carico a quello del generatore, ripristinando
così parzialmente la simmetria delle tensioni di linea.
62
5.4. L’UTENZA MONOFASE
5.4
L’utenza monofase
Nelle abitazioni domestiche arrivano solamente due fili: una fase ed il neutro. In una
rete trifase a 400 [V ], la tensione linea-terra
è ufficialmente pari a circa 230 [V ], che è la
nota tensione per usi domestici.
Questo viene fatto essenzialmente perché
questo tipo di utenza è prevalentemente destinata all’illuminazione e ad altri utilizzi in cui
una singola fase è sufficiente. Non si ha a che
fare con grosse macchine rotanti come avviene nelle industrie, inoltre la potenza installata
è modesta, limitata a pochi kilowatt.
Le forniture agli utenti monofase sono distribuite tra le tre fasi in modo da equilibrare statisticamente gli assorbimenti ed ottimizzare il trasporto. Le correnti di ritorno dai neutri delle abitazioni si compensano
mediamente in modo da fare tendere a zero
Figura 5.5:
la corrente di neutro verso il trasformatore.
magnetotermico fornito dall’ENEL per le industrie
5.5
Contatore elettronico trifase con
Le grandezze elettriche nei sistemi trifase
Di seguito verranno così indicate:
• Vt : tensione di fase (nel sistema trifase);
• Vm : tensione di fase (nel sistema monofase);
• Vc : tensione concatenata;
• It : corrente di linea (nel sistema trifase);
• Im : corrente di linea (nel sistema monofase);
• Pt , Qt , At : potenze nel sistema trifase;
• Pm , Qm , Am : potenze nel sistema monofase;
63
Capitolo 5. SISTEMA TRIFASE
Vt = Vm = V
It = I m = I
Pt = 3 · Pm = 3 · V · I · cos ' =
VC =
p
p
3 · Vm =
p
3·V
3 · VC · I · cos '
p
Qt = 3 · Qm = 3 · V · I · sin ' = 3 · VC · I · sin '
p
At = 3 · Am = 3 · V · I = 3 · VC · I
p
p
p
At = Pt2 + Q2t = (3 · Pm )2 + (3 · Qm )2 = 3 · Pm2 + Q2m
5.6
(5.6)
(5.7)
(5.8)
(5.9)
(5.10)
Misura della potenza attiva
La potenza attiva assorbita da un carico trifase, che è quella considerata al fine della fatturazione. Il circuito di misura è riportato in Figura 5.6.
Figura 5.6: Circuito per la misura della potenza in un sistema trifase con neutro
Se non è presente il neutro si può immaginare di realizzare un circuito simile al precedente,
in cui come riferimento per le tensioni di due fasi è utilizzata la terza linea. Si può realizzare il
circuito di misura di Figura 5.7.
Questa configurazione a tre fili è comunemente utilizzata nella pratica ed è nota come
inserzione Aron4 . La potenza totale è data dalla somma algebrica del valore indicato dai
4
Inserzioni di Aron: Metodo di misura della potenza elettrica di un sistema trifase tramite l’ausilio di due
soli wattmetri.
Sebbene in un sistema trifase le potenze da misurare siano tre, una per ogni fase, con l’ausilio dell’inserzione
64
5.7. VANTAGGI
Figura 5.7: Misura della potenza in un sistema trifase con il metodo Aron
wattmetri5 . Se il carico è equilibrato e puramente resistivo l’indicazione dei due strumenti è
identica, se invece il carico ha una componente induttiva il valore indicato dal primo wattmetro
in ordine di rotazione delle fasi (la sequenza temporale con cui iniziano i cicli dell’onda) indica
un valore maggiore del secondo. La situazione è opposta nel caso di un carico a componente
capacitiva. Se lo sfasamento supera il limite di 60 lo strumento di valore minore inizierà a
fornire un valore negativo, fino a che in teoria i due strumenti daranno indicazioni uguali in
modulo ma opposte per carichi puramente reattivi (potenza attiva pari a zero).
5.7
Vantaggi
La grande importanza del sistema trifase è dovuta a tre fondamentali vantaggi:
• momento di rotazione;
• ottimizzazione dei conduttori;
• minori perdite di trasporto.
5.7.1
Momento di rotazione
La presenza di tre segnali sfasati permette di creare facilmente un campo magnetico rotante,
alla base del funzionamento del motore elettrico. I piccoli motori elettrici utilizzati negli eletAron si riesce a misurare la potenza del sistema con due soli wattmetri, collegando le amperometriche sulle
fasi 1 e 3 e le [V ] metriche tra le fasi 1-3 e 2-3. La somma delle letture dei due wattmetri è la potenza attiva
assorbita dal sistema trifase.
5
Wattmetro: è uno strumento che misura la potenza elettrica, esprimendone il valore in watt. Se di tipo
tradizionale è elettromeccanico (i modelli più pregiati sono di tipo elettrodinamico), ma i modelli più recenti
sono anche di tipo elettronico (strumenti digitali).
65
Capitolo 5. SISTEMA TRIFASE
trodomestici, alimentati con una sola fase, devono generare il campo rotante con particolari
artifici, e si ha comunque un considerevole calo di rendimento.
5.7.2
Ottimizzazione dei conduttori
Possiamo tranquillamente immaginare i tre generatori del sistema trifase come tre generatori
fisicamente separati, ciascuno con la propria linea a due fili diretta verso i carichi. In questo caso
i fili necessari sarebbero sei. Ebbene, nel sistema trifase questi tre generatori sono sincronizzati
e sfasati come già detto di 120 .
Questo fatto comporta che la somma algebrica delle correnti circolanti istante per istante in uno dei due fili di ciascuna linea è
nulla. Ne consegue che se questi tre fili vengono collegati assieme in un unico conduttore,
su di esso non si ha circolazione di corrente,
ed allora si può addirittura eliminare questo
filo, del tutto inutile se il sistema è equilibrato. Il risultato è la possibilità di trasportare
la stessa quantità di energia utilizzando tre
Figura 5.8:
Un elettrodotto (su cui si posso-
no osservare quattro terne di fili) ed una cabina
elettrica
fili al posto di sei, con un enorme risparmio
in rame o alluminio specialmente sui lunghi
elettrodotti. Osservando una linea elettrica
ad alta tensione si potrà notare la presenza
di tre fili, detta terna (o multipli se i tralicci
portano più linee). Nelle linee in altissima tensione (>150 [kV ]) la singola fase viene trasportata su conduttori multipli, binati o trinati, al fine di ridurre l’induttanza e l’effetto corona con
i relativi effetti dispersivi.
5.7.3
Minori perdite di trasporto
Il terzo ma non meno importante aspetto del sistema trifase è la minore potenza dissipata
lungo le linee elettriche rispetto a un sistema monofase (maggiore rendimento di trasmissione).
Infatti poiché l’energia dei tre generatori viene trasmessa con solo tre fili anziché sei, la perdita
di potenza elettrica lungo gli elettrodotti è esattamente la metà del caso monofase.
66
5.8. CODICE COLORE CEI
5.8
Codice colore CEI
La norma CEI 16-4 / EN 60446 (Individuazione dei conduttori tramite colori o codici numerici )
stabilisce per i fili elettrici degli impianti trifase un preciso codice colore:
• Fase R o L1: nero
• Fase S o L2: grigio
• Fase T o L3: marrone
• Neutro N: blu
• Terra/schermo: giallo/verde
Non sempre gli elettricisti e le industrie produttrici rispettano questo codice. Si trovano
comunemente in commercio cavi trifase con due conduttori neri e uno marrone, ma i colori del
neutro e della messa a terra sono sempre rigidamente rispettati.
Negli impianti monofase (230 [V ]) si usano i colori blu per il neutro, marrone (generalmente)
per la fase e giallo/verde per il filo di messa a terra.
5.9
Rifasamento
Per rifasamento si intende quella pratica che permette di supplire allo sfasamento introdotto
nella linea da un carico reattivo. Il parametro più significativo è lo sfasamento ' tra la tensione
e la corrente di alimentazione.
5.9.1
Che cos’è
Si definisce “rifasamento” qualsiasi provvedimento inteso ad aumentare (o come si dice comunemente a “migliorare”) il fattore di potenza cos ' di un dato carico, allo scopo di ridurre, a
pari potenza attiva assorbita, il valore della corrente che circola nell’impianto. Lo scopo del
rifasamento è soprattutto quello di diminuire le perdite d’energia e di ridurre l’assorbimento
di potenza “apparente” proporzionalmente ai macchinari e alle linee esistenti in un sito industriale. Il rifasamento degli impianti ha acquistato importanza poiché l’ente distributore
dell’energia elettrica ha imposto clausole contrattuali attraverso i provvedimenti tariffari del
CIP (n 12/1984 e n 26/1989) che obbligano l’utente a rifasare il proprio impianto pena il
pagamento di una penale. Il rifasamento dell’impianto elettrico industriale correttamente dimensionato rappresenta l’intervento tecnologico a più basso tempo di pay-back. Generalmente,
il rifasamento di un impianto produttivo si ripaga in pochi mesi. Nei circuiti con particolari
67
Capitolo 5. SISTEMA TRIFASE
utilizzatori come le lampade a filamento, gli scaldacqua, certi tipi di forni, la potenza apparente
assorbita è tutta potenza attiva. Nei circuiti con utilizzatori che hanno al loro interno avvolgimenti come i motori, le saldatrici, gli alimentatori delle lampade fluorescenti, i trasformatori,
una parte della potenza apparente assorbita viene impegnata per eccitare i circuiti magnetici e
non è quindi impiegata come potenza attiva ma come potenza generalmente chiamata potenza
reattiva.
5.9.2
Introduzione
Il problema del rifasamento nasce quando
gli utilizzatori sono macchine elettriche come
motori e trasformatori; al loro interno hanno
degli avvolgimenti ed una parte della potenza assorbita viene impegnata per eccitare i
circuiti magnetici.
Il valore di corrente assorbita da un’utenza è espressa dal rapporto tra la somma in
quadratura tra la potenza attiva e potenza
reattiva e la tensione concatenata.
Nei sistemi di distribuzione dell’energia elettrica è opportuno minimizzare tale corrente,
dato che da essa dipendono la potenza attiva
e reattiva in funzione dell’angolo ' (impendenze del carico).
A tale corrente sono associati i fenome-
Figura 5.9: Apparato per la correzione automatica
ni di dissipazione per effetto Joule, caduta di
dello sfasamento
tensione nei vari componenti elettrici, e le potenze apparenti delle macchine elettriche impiegate. È facile osservare che un incremento
dell’angolo ' comporti un aumento della potenza reattiva a scapito della potenza attiva con
una conseguente perdita, prima di tutto sul piano economico.
Questo perché un incremento dello sfasamento comporta un aggravio per il distributore di
energia elettrica che deve fornire più potenza e quindi è costretto a un sovradimensionamento
degli impianti di generazione, trasporto e trasformazione.
68
5.9. RIFASAMENTO
5.9.3
Il rifasamento elettrico - aspetti teorici e presupposti tecnici
Nelle utenze industriali, la maggior parte dei carichi è costituita da motori e trasformatori
che generano un campo magnetico, che “sfasa” tensione e corrente causando la produzione di
energia reattiva (espressa in [KVArh] - KiloVoltAmpere Reattivi Ora). La sola potenza “utile”
(in grado, cioè, di trasformare l’energia elettrica in lavoro meccanico) è quella attiva. La
potenza reattiva, non solo non può essere trasformata in lavoro meccanico, ma causa anche
il transito in rete di corrente induttiva. Questa corrente induttiva causa una diminuzione
della capacità di trasporto di energia “utile” da parte del cavo, in quanto (se assimiliamo il
cavo elettrico ad un ipotetico tubo) la sua presenza “ruba” spazio ad una certa quantità di
energia attiva. La potenza reattiva induttiva, quindi, costituisce un carico supplementare per
i generatori, i trasformatori e le linee di trasporto e distribuzione, impegnando il fornitore di
energia a sovradimensionare i propri generatori a scapito del rendimento e provocando altresì
una maggiore caduta di tensione in linea, che si traduce in ulteriori perdite di potenza attiva.
Per ovviare a questo problema si inseriscono in parallelo ai motori delle batterie di condensatori
(carichi capacitivi) che contrastano l’effetto dei carichi induttivi, tendendo a riportare in “fase”
tensione e corrente. Proprio per questo motivo tale operazione viene detta “rifasamento”.
5.9.4
Quando rifasare
Per gli impianti in bassa tensione e con potenza impegnata maggiore di 15 [kW ]:
• quando il fattore di potenza medio mensile è inferiore a 0,7 l’utente è obbligato a rifasare
l’impianto;
• quando il fattore di potenza medio mensile è compreso tra 0,7 e 0,9 non c’è l’obbligo di
rifasare l’impianto ma l’utente paga una penale per l’energia reattiva;
• quando il fattore di potenza medio mensile è superiore a 0,9 non c’è l’obbligo di rifasare
l’impianto e non si paga nessuna quota d’energia reattiva.
L’utente è quindi sollecitato a rifasare almeno fino ad un fattore di potenza cos ' = 0, 9.
5.9.5
Calcolo della capacità
L’ultimo aspetto del rifasamento consiste nel calcolare il valore della capacità della batteria di
condensatori da inserire in parallelo ai motori.
Di seguito sono riportate le formule per inserire una batteria in configurazione stella (Y ) ed
in configurazione triangolo ( ), avendo deciso di rifasare l’angolo ' per ottenere un fattore di
potenza cos ' noto.
69
Capitolo 5. SISTEMA TRIFASE
CY =
Q
P · tan '
Q P · tan '
=
2
3 · w · VF
w · VC2
(5.11)
P · tan '
3 · w · VC2
(5.12)
C =
70
Q
Capitolo
6
Motori elettrici
Col termine motore elettrico si definisce una macchina elettrica in cui la potenza di ingresso è
di tipo elettrico e quella di uscita è di tipo meccanico, assumendo la funzione di attuatore.
6.1
Introduzione
I motori elettrici hanno importanza fondamentale nella società moderna, tanto che
la popolazione dei motori elettrici di un paese
è utilizzata quale indicatore del suo sviluppo
tecnologico. Inoltre l’andamento, ovvero l’aumento o la diminuzione della popolazione dei
motori elettrici, è uno dei fattori utilizzati per
valutare il livello di crescita tecnologica di un
paese. Per verificare ciò basti pensare a tutti gli oggetti che normalmente ci circondano,
dal treno al frullatore, dal walkman al frigo e
via dicendo, di cui la società moderna fa ampio uso e che si può dire mettano in moto la
nostra vita. Al motore elettrico è in genere
richiesto un particolare comportamento. Tale
Figura 6.1: Illustrazione di un motore elettrico in
corrente continua
comportamento viene realizzato inserendo il motore in un azionamento elettrico.
Capitolo 6. MOTORI ELETTRICI
6.2
Funzionamento tecnico
6.2.1
Parti principali
Statore
Lo statore, in una macchina avente parti in movimento, è l’insieme delle parti fisse. Il termine
è di uso comune nelle macchine rotanti, quali i motori elettrici, le turbine o altre macchine, in
quanto contrapposto al rotore (parte mobile).
Funzioni Lo statore ha la funzione di sostenere, almeno parzialmente, la macchina. Nelle
macchine elettriche, è parte del circuito magnetico insieme al rotore e contiene gli avvolgimenti
indotti o induttori installati in apposite cave.
Caratteristiche Nelle macchine elettriche, lo statore quando è a magneti permanenti, è costituito
da magneti e ha una superficie liscia, quando è del tipo avvolto è costituito da lamierini in lega
acciaio-silicio da mezzo millimetro di spessore a svariati millimetri, o da acciaio massiccio, isolati
tra di loro. Questo dipende da quanto lo statore viene interessato da flussi magnetici variabili
nel tempo: più il flusso magnetico sarà variabile, minore sarà la dimensione dei lamierini.
Questo perché la variazione di flusso nei materiali ferromagnetici (come l’acciaio) provoca la
circolazione di correnti senza impieghi utili, chiamate correnti parassite e la perdita di energia
dovuta alla magnetizzazione non lineare del materiale.
Rotore
Un rotore è la parte rotante attorno al proprio asse, se esiste, di un macchinario per la
generazione o la trasmissione di potenza.
Il termine viene usato se la parte rotante è strutturata in maniera tale da contribuire significativamente alla trasmissione di potenza: una ruota a pale di una turbina o il nucleo rotante
di un motore elettrico sono chiamati rotori, mentre l’albero a camme di un motore a scoppio
no.
Funzionamento Laddove occorra trasformare il movimento in energia o viceversa, una delle
parti della macchina utilizzata dovrà essere mobile rispetto all’altra. Una larga classe di queste
macchine risolvono il problema utilizzando una parte ruotante attorno al proprio asse, detta
appunto rotore, che da un lato trasmette o riceve forza e potenza meccanici, e dall’altra riceve
o trasmette energia sotto un’altra forma o utilizzando un diverso modo di trasmissione. In
contrapposizione, lo statore è la parte del macchinario che rimane solidale col terreno o con un
72
6.2. FUNZIONAMENTO TECNICO
altro riferimento fisso, e che spesso (non sempre) è anche il veicolo di trasmissione di forza e
potenza che interagisce col rotore.
Impiego Viene utilizzato in maggior parte nei motori, tipicamente quelli elettrici, costituiti da un accoppiamento rotore-statore, dove la trasmissione di potenza è affidata alle forze
elettromagnetiche che si generano fra le due parti, opportunamente alimentate dalla corrente. Il generatore elettrico inverte concettualmente il percorso della potenza, da una sorgente
meccanica a una linea elettrica.
Le turbine sono invece un esempio di macchina generatrice, che riceve potenza dalla pressione
del gas o dell’acqua entranti e la trasmettono lungo il proprio asse, mentre lo statore svolge
solo una funzione di contenimento ed eventualmente indirizzamento dei fluidi.
Svantaggi La necessità di dover controllare i rotori, per modificare ad esempio l’inclinazione
delle pale nelle turbine, pone il problema di dover agire tramite contatti mobili, striscianti o
volventi poiché non è possibile fissare nessun componente fisso con l’ambiente al rotore. Questi
contatti, specie quelli elettrici, possono rappresentare un punto debole per l’intera apparecchiatura, preferendo nella maggior parte dei casi l’adozione di soluzioni che ne prevedano l’uso il
meno possibile.
Campo magnetico
Un campo magnetico è un campo vettoriale: associa, cioè, ad ogni punto nello spazio
un vettore che può variare nel tempo. L’effetto fisico di un campo magnetico si esplica
in termini della forza di Lorentz subita da
una carica elettrica in movimento attraverso, appunto, il campo. Sorgenti del campo
magnetico sono correnti elettriche.
Storicamente gli effetti magnetici vengono
scoperti grazie a magneti naturali che, allo Figura 6.2: Spettro magnetico (ovvero l’insieme
stesso tempo, generano un campo magnetico delle linee di campo) dovuto ad un magnete, reso
e ne subiscono gli effetti per via delle correnti
elettriche su scala atomica.
visibile da un po’ di limatura di ferro su un foglio
di carta
La direzione del vettore campo è la direzione indicata dalla posizione d’equilibrio dell’ago di una bussola immersa nel campo. Il verso
del vettore campo si determina con la regola della presa della mano destra.
73
Capitolo 6. MOTORI ELETTRICI
~ storicamente era la densità
Il campo magnetico, solitamente indicato con il vettore B,
~
~ (H
~ = B ) era il campo magnetico: questa
di flusso magnetico o induzione magnetica, e H
µ
~ e quello in
terminologia è oggi utilizzata per distinguere tra il campo magnetico nel vuoto (B)
~ con µ1 diversa dall’unità). L’unità di misura dell’induzione magnetica nel SI
un materiale (H,
è il tesla [T ].
Lo strumento per la misura del campo magnetico è il magnetometro.
Magneti
Un magnete (o calamita) è un corpo che
genera un campo magnetico. Il nome deriva
dal greco µ↵ ⌫⌘⌧ ⌘&
◆#o& (magnítis líthos),
cioè “pietra di Magnesia”, dal nome di una
località greca nota sin dall’antichità per gli
ingenti depositi di magnetite. Un magnete
può essere permanente o un elettromagnete:
un magnete permanente non necessita di nessuno stimolo esterno per generare il campo
magnetico, mentre un elettromagnete genera
il campo grazie allo stimolo di una corrente
elettrica; un magnete permanente si può forFigura 6.3: Particolare di un motore elettrico
mare naturalmente in alcune rocce, ma può
anche essere creato artificialmente.
I magneti sono attratti o respinti da diversi materiali; un materiale fortemente attratto da
un magnete possiede un’alta permeabilità magnetica: esempi in questo senso sono il ferro e
alcuni tipi di acciaio, detti “ferromagnetici”. L’ossigeno liquido è invece un esempio di materiale
con bassa permeabilità, o “paramagnetico”, essendo attratto solo debolmente da un campo
magnetico. L’acqua possiede una permeabilità così bassa da venire respinta da un campo
magnetico (fenomeno del “diamagnetismo”). Tutto ha una permeabilità misurabile: le persone,
i gas e persino il vuoto dello spazio.
6.2.2
Funzionamento
La corrente elettrica passa in un avvolgimento di spire che si trova nel rotore. Questo avvolgimento, composto da fili di rame, crea un campo elettromagnetico al passaggio di corrente.
Questo campo elettromagnetico è immerso in un altro campo magnetico creato dallo statore,
1
74
µ: permeabilità magnetica.
6.3. MOTORI IN CORRENTE CONTINUA
il quale è caratterizzato dalla presenza di due o più coppie polari (calamite, elettrocalamite,
ecc...).
Il rotore per induzione elettromagnetica
inizia a girare, in quanto il campo magnetico del rotore è attratto dal campo magnetico
dello statore e viceversa. Ogni mezzo giro la
polarità cambia, in modo da dare continuità alla rotazione. Questo motore funziona a
corrente alternata, per il motore a corrente
continua vedere nelle voci correlate. Durante
la trasformazione, una modesta parte dell’energia viene dispersa per l’effetto Joule. Il
motore elettrico a seconda della sua tensione
di alimentazione, e del suo comportamento,
Figura 6.4: Schema del principio di funzionamento
può essere un motore asincrono, motore sincrono, o un motore in corrente continua. Dato il
principio di funzionamento, un motore elettrico fa sempre muovere l’albero motore di moto
rotatorio; un metodo per ovviare a questo problema nel caso in cui si abbia necessità di un
moto lineare è l’applicazione all’albero motore di un glifo oscillante, componente meccanico che
converte appunto il moto rotatorio in rettilineo oscillante.
6.3
Motori in corrente continua
Il motore in corrente continua (brevemente motore in CC) è stato il primo motore elettrico
realizzato, ed è tuttora utilizzato ampiamente per piccole e grandi potenze, inoltre tale motore
può funzionare da dinamo. Sono a corrente continua (o comunque alimentabili in corrente
continua) numerosi motori di piccola potenza per usi domestici, come anche motori per trazione
ferroviaria e marina della potenza di molte centinaia di [kW ].
6.3.1
Cenni storici
Uno dei primi motori elettromagnetici rotanti, se non il primo, è stato inventato da Michael
Faraday nel 1821, e consisteva in un filo conduttore tenuto fermo verticalmente alla sua estremità superiore in modo che l’estremità inferiore fosse immersa in un piatto contenente mercurio.
Un magnete permanente circolare era sistemato al centro del piatto. Quando una corrente
elettrica veniva fatta scorrere nel filo, questo ruotava attorno al magnete mostrando che la
corrente generava un campo magnetico attorno al filo. Questo è un esperimento didattico
75
Capitolo 6. MOTORI ELETTRICI
Figura 6.5: Un semplice motore CC. Quando la corrente scorre negli avvolgimenti, si genera un campo
magnetico intorno al rotore. La parte sinistra del rotore è respinta dal magnete di sinistra ed attirata
da quello di destra. Analogamente fa la parte in basso a destra. La coppia genera la rotazione
Figura 6.6: Il rotore continua a girare
76
6.3. MOTORI IN CORRENTE CONTINUA
Figura 6.7: Quando le armature si allineano orizzontalmente, il commutatore inverte la direzione di
corrente attraverso gli avvolgimenti, modificando anche il campo magnetico. Il processo ritorna quindi
allo stato di partenza e il ciclo si ripete
utilizzabile in una lezione di fisica, anche se al posto del mercurio (tossico) conviene usare un
altro liquido conduttore come acqua molto salata.
6.3.2
Motore a spazzole
Il classico motore in corrente continua ha una parte che gira detta appunto rotore o anche
armatura e una parte che genera un campo magnetico fisso (nell’esempio i due magneti colorati)
detta statore. Un interruttore rotante detto commutatore o collettore a spazzole inverte due
volte ad ogni giro la direzione della corrente elettrica che percorre i due avvolgimenti generando
un campo magnetico che entra ed esce dalle parti arrotondate dell’armatura. Nascono forze di
attrazione e repulsione con i magneti permanenti fissi (indicati con N ed S nelle Figure 6.5, 6.6
e 6.7).
La velocità di rotazione dipende da:
• tensione applicata;
• corrente assorbita dal rotore;
• carico applicato.
77
Capitolo 6. MOTORI ELETTRICI
La coppia generata è proporzionale alla corrente ed il controllo più semplice agisce sulla
tensione d’alimentazione, mentre nei sistemi più complessi si usa un Controllo automatico in
retroazione che legge le variabili per generare la tensione da applicare al motore. Il motore
CC a magneti permanenti ha un comportamento reversibile: diventa un generatore di corrente
continua se si collega un altro motore all’albero. Si può allora prelevare l’energia elettrica
prodotta collegandosi alle spazzole, inoltre da questo si può intuire la sua capacità di agire
anche da freno e/o usato per il recupero dell’energia nei mezzi ibridi o essere semplificato
come un semplice freno: applicando tra le spazzole un resistore l’energia meccanica trasmessa
all’albero si dissipa su questo resistore). Riassumendo si può affermare che il motore CC ha
tutte le funzioni necessarie per un mezzo mobile: oltre alla funzione di motore può recuperare
l’energia funzionando da dinamo quando serve l’azione frenante o agire semplicemente da freno.
Il suo limite principale è nella necessità del commutatore a spazzole:
• le spazzole sono in grafite, mentre nei piccoli servomotori e nei tipi utilizzati nei lettori
CD/DVD o registratori a cassette sono in lega metallica bianca. La differenza è nella frequenza della loro sostituzione, infatti nelle macchine utensili come smerigliatrici o trapani,
si utilizzano spazzole in grafite, perché è molto semplice e veloce sostituirle, le spazzole
in metallo, sono usate su apparecchi dove risulta scomodo o non conveniente cambiarle,
come nei motori d’avviamento dei mezzi di trasporto;
• le spazzole pongono un limite alla massima velocità di rotazione: maggiore è la velocità e
più forte è la pressione che bisogna esercitare su di esse per mantenere un buon contatto,
comunque i motori usati negli aspirapolvere e negli elettroutensili portatili (trapani, mole,
ect.) possono raggiungere i 35000-45000 giri al minuto;
• tra spazzole e collettore, nei momenti di commutazione, si hanno transitori di apertura
degli avvolgimenti induttivi e quindi scintillio (attenuabile con opportuni sistemi ma non
eliminabile);
• queste scintille comportano disturbi elettrici sia irradiati nell’ambiente circostante che
trasmessi al generatore di tensione (che alimenta il motore); questi disturbi, in determinati
settori di impiego, possono causare problemi di compatibilità elettromagnetica.
La presenza di avvolgimenti elettrici sul rotore ha anche due aspetti negativi:
• se il motore è di grossa potenza si hanno dei problemi di smaltimento del calore (gli
avvolgimenti si riscaldano per effetto Joule e il campo magnetico alternato nel nucleo del
rotore genera altre perdite, causate da isteresi magnetica e correnti parassite nel nucleo
stesso, e quindi altro calore;
78
6.3. MOTORI IN CORRENTE CONTINUA
• gli avvolgimenti appesantiscono il rotore (aumenta il momento d’inerzia): se il motore
deve rispondere con rapidità e precisione (come avviene nelle automazioni industriali e
nella robotica) il controllo diventa più complesso; per piccole potenze (da 1 a 200W)
e servocontrolli a volte si usano particolari tipi di motori con rotore con avvolgimenti
a forma di bicchiere e privo del nucleo di ferro, detti “ironless”: hanno bassa inerzia e
rendimento elettrico più elevato dei loro corrispondenti con rotore avvolto su nucleo di
ferro.
6.3.3
Motore lineare
Un motore lineare è un motore elettrico in cui il rotore e lo statore invece di essere circolari
sono “srotolati”, ed invece di produrre un momento torcente producono una forza lineare.
Esistono molte soluzioni progettuali per motori lineari, che possono essere suddivise in due
categorie: a bassa accelerazione e ad alta accelerazione. I motori a bassa accelerazione sono
adatti per treni a levitazione magnetica (maglev). I motori ad alta accelerazione sono più piccoli
ed usati per accelerare oggetti a velocità molto elevate. Sono usati prevalentemente per studi di
collisioni ad alta velocità, armi, propulsione spaziale. Anche gli acceleratori di particelle lineari
rientrano in questa categoria.
Motori lineari a bassa accelerazione
Il concetto di motore lineare fu sviluppato dal professor Eric Laithwaite dell’Imperial College di Londra. In questo progetto,
come in molti motori lineari a bassa accelerazione successivamente realizzati, la
forza è prodotta da una serie di elettromagneti che generano un campo magnetico scorrevole, il quale interagisce con elementi con- Figura 6.8: AirTrain all’aeroporto JFK. Si noti la linea di indotti in
duttori fissi sulla guida. I allumino in mezzo alle rotaie
conduttori possono essere
anelli, solenoidi e semplici pezzi di metallo. Il campo magnetico prodotto dall’elettromagnete
79
Capitolo 6. MOTORI ELETTRICI
induce nei conduttori, per effetto della legge di Faraday-Neumann-Lenz, una corrente elettrica
che agisce respingendo il campo inducente. Questo causa una forza che spinge il veicolo in senso
opposto a quello di scorrimento del campo magnetico.
Questa tecnica è impiegata in sistemi di trasporto a levitazione magnetica come i treni
maglev installati a Vancouver e Toronto (Canada), all’aeroporto JFK di New York e a Kuala
Lampur in Malesia. Il sistema è usato anche in alcune Montagne russe ed è stato proposto in
esecuzione verticale come ascensore per i pozzi delle miniere.
Motori lineari ad alta accelerazione
Questi motori hanno molte potenziali applicazioni. Sono presi in considerazione per realizzare
armi in grado di perforare corazze, poiché con il motore lineare possono essere lanciati piccoli
oggetti metallici ad altissima velocità e con grande energia cinetica. Sono anche studiati come
motori per la propulsione spaziale, poiché possono espellere massa ad alta velocità.
Recentemente i motori lineari ad alta accelerazioni trovano impiego anche in apparecchiature
dedicate alla produzione di schede elettroniche, come i sistemi di posizionamento dei componenti
(anche definite “Pick & Place”) ed i sistemi di collaudo automatico (flying probe o sonde mobili).
L’applicazione dei motori lineari in queste apparecchiature consente di ottenere prestazioni, in
termini di velocità di spostamento, decisamente superiori a quelle ottenibili con altre tipologie
di motori elettrici.
La realizzazione di motori ad alta accelerazione è complessa e la difficoltà principale è data
dalla necessità di ottenere una enorme quantità di energia in brevissimo tempo, non fornibile
dai comuni generatori elettrici. Per questo scopo sono spesso usati i condensatori, che sono
però costosi ed ingombranti. In alternativa vengono usati particolari generatori elettrici detti
omopolari in grado di convertire rapidamente l’energia cinetica accumulata in un volano in
energia elettrica.
Un altro problema è dato dalla necessità di produrre campi magnetici di eccezionale intensità, tale a volte da rendere inutilizzabili i magneti superconduttori. Il problema viene superato
con particolari soluzioni tecniche e speciali elettromagneti.
6.3.4
Motore brushless
Il motore brushless è un motore elettrico a magneti permanenti. A differenza di uno a spazzole,
non ha bisogno di contatti elettrici striscianti sull’albero motore per funzionare (da qui il nome).
La commutazione della corrente circolante negli avvolgimenti, infatti, non avviene più per via
meccanica (tramite i contatti striscianti), ma elettronicamente. Ciò comporta una minore
80
6.3. MOTORI IN CORRENTE CONTINUA
resistenza meccanica, elimina la possibilità che si formino scintille al crescere della velocità di
rotazione, e riduce notevolmente la necessità di manutenzione periodica.
Descrizione
In un motore a spazzole, il contatto meccanico delle spazzole con il collettore rotante sul rotore
chiudono il circuito elettrico tra l’alimentazione e l’avvolgimento di rotore.
In un motore brushless, l’inversione di corrente è ottenuta elettronicamente, tramite un
banco di transistor di potenza comandati da un microcontrollore che controlla la commutazione
della corrente. Dato che il controllore deve conoscere la posizione del rotore rispetto allo statore,
esso viene solitamente collegato a un sensore a effetto Hall, come il Pick-up..
Vantaggi
Il primo grosso vantaggio riguarda la vita attesa del motore, dato che le spazzole sono il “punto
debole” di un motore in corrente continua. L’assenza di spazzole elimina anche la principale
fonte di rumore elettromagnetico presente negli altri motori in continua.
L’ingombro è limitato rispetto alla potenza che possono erogare. In termini di efficienza, i
motori brushless sviluppano molto meno calore di un equivalente motore in corrente alternata.
Gli avvolgimenti sullo statore inoltre hanno una buona capacità di dissipazione e permettono di
costruire motori “lisci”. L’assenza di scintille è fondamentale quando il motore opera in ambienti
saturi di composti chimici volatili come i carburanti.
In questo tipo di motori i magneti permanenti sono posizionati sul rotore e sono realizzati
con speciali materiali che permettono di avere un’inerzia rotorica molto bassa, cosa che permette di avere un controllo estremamente preciso sia in velocità che in accelerazione. Queste
caratteristiche li rendono adatti all’utilizzo nei lettori CD e DVD ma anche, nelle versioni più
grandi nell’aeromodellismo e nei veicoli elettrici. Esistono applicazioni navali di tali motori con
tecnologie a superconduzione che hanno potenze dell’ordine di MW. Ultimamente sono molto
utilizzati in campo industriale e impiegati nelle macchine automatiche che necessitano di movimenti precisi e veloci con ingombri decisamente contenuti e grande versatilità, offerta anche da
apparecchiature di controllo programmabili molto sofisticate che danno un completo controllo
e diagnostica del motore.
Svantaggi
Il principale svantaggio di questo tipo di motori sta nel maggiore costo. Al contrario dei motori a
spazzole, infatti, il controllo viene effettuato elettronicamente con un circuito integrato venduto
81
Capitolo 6. MOTORI ELETTRICI
assieme al motore; per questo non è solitamente possibile utilizzare un potenziometro o un
reostato (inefficiente ma estremamente economico).
6.3.5
Motore passo-passo
I motori passo-passo, spesso chiamati anche passo, step o stepper, sono considerati la scelta
ideale per tutte quelle applicazioni che richiedono precisione nello spostamento angolare e nella
velocità di rotazione, quali la robotica, le montature dei telescopi ed i servomeccanismi in
generale. Tuttavia ultimamente, per le applicazioni high-end, vengano spesso sostituiti da
motori brushless o da attuatori voice-coil.
Vantaggi dei motori passo passo
• quelli costruiti con tecnologia comune hanno un costo non elevato, relativamente ad altri
tipi di motore con analoghe prestazioni;
• è possibile realizzare azionamenti di precisione controllati da computer in catena aperta,
cioè senza utilizzare sensori di posizione o di velocità. Sono quindi utilizzabili con relativa
semplicità e senza richiedere particolare potenza di calcolo;
• hanno un’elevata robustezza meccanica ed elettrica: infatti non esistono contatti elettrici
striscianti e, se necessario, possono essere realizzati anche in ambiente completamente
stagno;
• è facile far compiere all’albero piccole rotazioni angolari arbitrarie in ambedue i versi e
bloccarlo in una determinata posizione;
• la velocità di rotazione può essere molto bassa anche senza l’uso di riduttori meccanici;
• hanno molto spesso momento d’inerzia piuttosto basso;
• sono molto stabili nella posizione a rotore bloccato e non presentano pendolamenti come
nei sistemi brushless;
• se dimensionati bene non necessitano di alcuna taratura.
Difetti dei motori passo passo
• richiedono sempre circuiti elettronici per il pilotaggio, in genere di tipo digitale;
• hanno un funzionamento a scatti e producono vibrazioni, soprattutto ai bassi regimi e se
si adottano le tecniche di pilotaggio più semplici;
82
6.3. MOTORI IN CORRENTE CONTINUA
• il loro rendimento energetico dipende dalla tecnologia costruttiva adottata, la potenza meccanica espressa come coppia e misurata in Nm (Newton per metro), a parità
di assorbimento in corrente, dipende spesso dal tipo di pilotaggio elettrico/elettronico
adottato;
• permettono una velocità di rotazione massima intorno a 1000-1500 rpm. Esistono tuttavia
motori che raggiungono i 4000-5000 rpm tramite sistemi di retroazione ad anello chiuso.
La loro caratteristica di coppia tuttavia scende quasi esponenzialmente al crescere della
velocità.
Il principio di funzionamento
I motori passo-passo sono motori che, a
differenza di tutti gli altri, hanno come scopo quello di mantenere fermo l’albero in una
posizione di equilibrio: se alimentati si limitano infatti a bloccarsi in una ben precisa
posizione angolare.
Solo indirettamente è possibile ottenerne
la rotazione: occorre inviare al motore una serie di impulsi di corrente, secondo un’opportuna sequenza, in modo tale da far spostare,
per scatti successivi, la posizione di equilibrio.
Figura 6.9: Motori passo-passo
È così possibile far ruotare l’albero nella
posizione e alla velocità voluta semplicemente contando gli impulsi ed impostando la loro frequenza, visto che le posizioni di equilibrio dell’albero sono determinate meccanicamente con
estrema precisione.
La costruzione elettromeccanica
I motori passo-passo si dividono tradizionalmente in tre grandi gruppi: motori a magnete
permanente, motori a riluttanza variabile e motori ibridi; questi ultimi sono i migliori. In realtà
la quasi totalità di quelli oggi reperibili sono proprio del terzo tipo.
Un motore ibrido è costituito da un rotore e da uno statore; nella fotografia a lato è riportato
un esemplare non particolarmente recente ma in cui si vede chiaramente la struttura.
Il rotore appare come una coppia di ruote dentate affiancate e solidali all’albero (i “denti”
sono chiamati coppette) costituite da un nucleo magnetico (le due ruote sono permanentemente
magnetizzate, una come NORD, l’altra come SUD) e le coppette in materiale ferromagnetico.
83
Capitolo 6. MOTORI ELETTRICI
Il numero di denti è variabile ma 50 è in assoluto il più frequente. Tra le due ruote è presente
uno sfasamento esattamente pari ad 1/2 del passo dei denti: il dente di una delle due sezioni
corrisponde quindi alla valle dell’altra. Nel rotore non sono presenti fili elettrici e quindi manca
completamente ogni connessione elettrica tra la parte in movimento e quella fissa. In genere il
rotore è montato su cuscinetti a sfera, anche nei modelli economici.
Lo statore appare come il classico insieme
di avvolgimenti ed il circuito magnetico è costituito da 4 o, più frequentemente, 8 “espansioni polari” (otto in quello mostrato fotografia). All’interno dello statore sono presenti
piccoli denti che si affacciano esattamente a
quelli del rotore o meglio, sono esattamente
affacciati al rotore solo il gruppo di denti appartenenti ad una espansione polare e a quella
opposta; le altre coppie sono sfalsate rispettivamente di 1/4, 1/2 e 3/4 del passo dei denti.
Figura 6.10: Struttura di un motore passo-passo
Avvolti intorno ai poli magnetici dello statore
ci sono i fili che, opportunamente percorsi da corrente, generano il campo magnetico.
All’esterno sono evidentemente presenti le alimentazioni dei vari avvolgimenti; in pratica le
fasi possono essere avvolte secondo due schemi:
• sono presenti due soli avvolgimenti (avvolti su più espansioni polari) e quindi all’esterno
arrivano due sole coppie di fili: in questo caso si parla di motori bipolari in quanto
la corrente dovrà percorrere le fasi nei due versi al fine di creare gli opportuni campi
magnetici;
• sono presenti quattro avvolgimenti avvolti a coppie, in antiparallelo, sulle espansioni polari; all’esterno arrivano almeno cinque fili (spesso sono infatti presenti delle connessioni
interne al motore tra le varie fasi). Si parla in questo caso di motori unipolari in quanto
la corrente nella singola fase ha sempre lo stesso verso. È possibile creare due campi
magnetici opposti semplicemente scegliendo in quale dei fili debba passare la corrente.
Una tipologia particolare di motore passo-passo è utilizzabile sia in configurazione unipolare
che bipolare: si tratta di quelli a 6 o 8 fili.
Il numero di differenti posizioni di equilibrio presenti in una rotazione completa dell’albero
è in genere indicato come passi per giro e dipende del numero dei denti del rotore e dai poli
dello statore, non dal numero di fili uscenti o dal numero delle fasi, questo numero è spesso
stampato sul contenitore ed espresso in gradi.
84
6.4. MOTORI IN CORRENTE ALTERNATA
6.4
Motori in corrente alternata
6.4.1
Motore asincrono
Il motore asincrono è un tipo di motore elettrico in corrente alternata in cui la frequenza di
rotazione non è uguale o un sottomultiplo della frequenza di rete, ovvero non è “sincrono” con
essa; per questo si distingue dai motori sincroni. Il motore asincrono è detto anche motore ad
induzione in virtù del suo principio di funzionamento descritto di seguito.
Questo motore può essere utilizzato come alternatore con o senza l’utilizzo di condensatori
a seconda se viene collegato alla rete o no, ma solo una minima parte dei alternatori è di questo
tipo dato il suo minore rendimento.
Struttura
Il motore si compone di una parte fissa detta statore e una parte mobile detta rotore, ambedue
di forma cilindrica. In ambedue le parti, delle quali lo statore contiene il rotore, sono praticati
dei fori paralleli all’asse del cilindro, detti cave, destinati ad ospitare gli avvolgimenti, ovvero
l’insieme dei conduttori.
Funzionamento
Lo statore contiene in genere un numero
pari di avvolgimenti in quanto, normalmente,
ce ne sono 2 per ciascuna fase di alimentazione. Un motore a tre fasi, o trifase, avrà
di norma sei avvolgimenti ovvero tre coppie
polari.
I due avvolgimenti di ciascuna coppia polare sono collegati in serie e disposti fisicamente l’uno di fronte all’altro. Le coppie polari sono alimentate da una terna di correnti Figura 6.11: Il campo magnetico rotante generato
sinusoidali sfasate di 120 che producono un in un motore asincrono trifase
campo magnetico complessivo che ruota nello
spazio. Il rotore è dotato di un certo numero di fasi di norma chiuse in corto circuito.
La rotazione del campo magnetico di statore avviene ad una velocità fissa n legata alla
frequenza di alimentazione f , detta velocità di sincronismo. La velocità di rotazione del rotore
nr sarà sempre minore di quella di sincronismo. Questa differenza fa sì che il rotore “veda” un
85
Capitolo 6. MOTORI ELETTRICI
campo magnetico che ruota ad una velocità n nr, pertanto esso sarà sede di forze elettromotrici
e quindi correnti indotte (per questo si parla di motore a induzione).
Evidentemente le correnti di rotore produrranno a loro volta un campo magnetico che ruota
a velocità n
nr rispetto al rotore il quale ruota a velocità nr rispetto allo statore; il risultato
è che il campo di rotore ruota a velocità n rispetto allo statore ed è dunque sincrono con il
campo di statore.
Tale condizione di sincronismo tra le due onde di campo magnetico assicura che il motore
produca una coppia costante. La situazione in cui n = nr, cioè velocità di rotore uguale a quella
di sincronismo, è una condizione limite in cui non vi sono forze elettromotrici (e quindi correnti
indotte) e dunque la coppia motrice è zero. Diversamente, la mutua interazione attraverso i
relativi campi magnetici tra le correnti di rotore e quelle di statore produce una coppia risultante
netta.
Il legame tra velocità di sincronismo, frequenza f di alimentazione ed il numero di coppie
polari p è espresso dalla relazione:
n = 60 ·
f
p
(6.1)
Dove n è espressa in [rpm] (rotazioni per minuto) ed f è espressa in [Hz ]. Per esempio, un
motore con tre coppie polari (6 poli totali), alimentato a 50 [Hz ] ha una velocità angolare di
sincronismo di 1000 giri al minuto.
La velocità del rotore in condizioni nominali è sempre minore di un 3%/6%; è il fenomeno
dello scorrimento (slip) che consente la produzione della coppia. Dalla formula dello scorrimento
posso esprimere la velocità di rotazione effettiva del rotore (nr):
s=
n
nr
n
(6.2)
Ovviamente il valore effettivo dello scorrimento dipende dal carico effettivo sul rotore. Il carico
non è mai zero perché sono sempre presenti i fenomeni di attrito di scorrimento tra parti mobili
e con l’aria che impediscono al motore di ruotare alla velocità di sincronismo, impegnando una
certa coppia.
Gli avvolgimenti statorici sono in genere inglobati in resine che garantiscono un’ottima
protezione dall’acqua e dagli agenti atmosferici. Questi motori sono frequentemente alimentati
per mezzo di inverter elettronici che possono variarne la velocità variando in modo coordinato
la frequenza e la tensione di alimentazione. L’uso di inverter permette di azionare il motore
anche a partire da una corrente continua, come avviene nella trazione ferroviaria.
86
6.4. MOTORI IN CORRENTE ALTERNATA
Gli avvolgimenti statorici trifase possono essere collegati a stella oppure a triangolo, permettendo di alimentare lo stesso motore con tensioni trifase di 400 e 230 [V ]. In alcuni grossi
motori si preferisce avviare a stella e poi commutare a triangolo, al fine di limitare le correnti
di spunto, quando non sono utilizzati gli inverter.
Esistono motori asincroni di potenza usualmente inferiore a 3 [kW ] alimentati anche con
tensioni monofase. Tali motori possono essere dotati di ordinari avvolgimenti a due fasi, dove per
alimentare la seconda fase si usa il ritardo di tempo introdotto da un condensatore. Per potenze
piccolissime si usano i motori in cui la seconda fase è un circuito spazialmente asimmetrico chiuso
in corto circuito (motori a “polo shuntato”).
I motori asincroni operano normalmente con gli avvolgimenti di rotore chiusi in corto circuito
ma il rotore può essere eseguito in costruzioni differenti.
Rotore a gabbia di scoiattolo
Il circuito rotorico è costituito da barre di
alluminio pressofuse direttamente nelle cave
collegate tra loro da due anelli di alluminio.
Si tratta quindi di un circuito in cui il numero
di fasi è pari al numero di barre e che è per
costruzione in corto circuito. L’avvolgimento rotorico è praticamente un avvolgimento
ad m poli, essendo m il numero delle barre,
ma in realtà le correnti indotte circolano nelle barre in modo tale da generare lo stesso
numero di poli del campo rotante induttore;
dunque, dal punto di vista elettromagnetico,
Figura 6.12:
Motore asincrono a gabbia di
scoiattolo
l’avvolgimento del rotore a gabbia di scoiattolo è uguale ad un avvolgimento a tre fasi.
Questi motori sono largamente utilizzati nell’industria in quanto affidabili ed economici.
Accorgimenti
Per aumentare la coppia all’avviamento dei motori a gabbia di scoiattolo di grande potenza
(non avendo il rotore accessibile come in quelli di tipo avvolto) è possibile utilizzare gabbie
differenti:
• a Coppa, Viene utilizzato meno materiale di supporto per la gabbia di scoiattolo, que-
st’applicazione serve per ridurre i pesi, ma diminuisce anche la resistenza meccanica e la
sua rigidezza;
87
Capitolo 6. MOTORI ELETTRICI
• rotore a doppia gabbia, viene utilizzata una seconda gabbia, concentrica a quella più
esterna e a seconda di come sono progettate queste barre delle due gabbie, si ha un
motore piu o meno capace di sopportare l’avvio continuo e ripetitivo di carichi elevati,
questa tecnologia si distingue anche per il passaggio non sempre lineare dai bassi ai alti
regimi (cambiamento del rumore);
• rotore a gabbia profonda, la gabbia di scoiattolo, viene costruita utilizzando delle barre
profonde e questo sistema permette d’avere un passaggio fluido dai bassi agli alti regimi.
Rotore avvolto
Questo tipo di motore è costituito da un pacco di corone circolari di lamiere magnetiche scanalato come lo statore. L’avvolgimento viene costruito in maniera identica a quello di statore
e i suoi terminali fanno capo a tre anelli coassiali con il rotore. Su questi anelli strisciano delle
spazzole fisse collegate ai morsetti rotorici.
Storicamente i morsetti rotorici venivano collegati ad un reostato. Variando la resistenza
elettrica del reostato si poteva aumentare la resistenza dei circuiti rotorici spostando la coppia
massima verso lo scorrimento unitario (s = 1 ! rotore fermo), in modo da disporre in fase di
avvio del motore della coppia di spunto massima disponibile. Questo metodo serve ad avviare
motori di medie dimensioni (10-300 [kW ]). Dopo la partenza del motore le resistenze reostatiche
vanno staccate dopo aver opportunamente cortocircuitato i circuiti rotorici. In particolare, se le
resistenze reostatiche vengono collegate ai circuiti rotorici la curva di coppia si modifica perché
la coppia massima si sposta verso la scorrimento unitario e quindi si ottiene un punto di lavoro
a velocità inferiore (uso delle resistenze reostatiche per regolare la velocità).
Attualmente i motori asincroni a rotore avvolto sono applicati convenientemente, insieme
ad inverter, in unità motrici o generatrici a velocità variabile in cui l’intervallo di variazione
della velocità è piccolo. Il caso più tipico e diffuso è quello dei generatori eolici.
6.4.2
Motore sincrono
Il motore sincrono è un tipo di motore elettrico in corrente alternata in cui il periodo di rotazione
è sincronizzato con la frequenza della tensione di alimentazione, solitamente trifase.
Costruzione
È costituito da un rotore (parte rotante solidale all’albero) su cui sono presenti diversi poli magnetici di polarità alterna creati da magneti permanenti o elettromagneti alimentati in corrente
continua (detta corrente di eccitazione), e da uno statore su cui sono presenti gli avvolgimenti
del circuito di alimentazione. Le espansioni polari dello statore creano un campo magnetico
88
6.4. MOTORI IN CORRENTE ALTERNATA
rotante che trascina le espansioni polari del rotore. La frequenza di rotazione dipende dalla
frequenza di alimentazione (p.e. in Italia è 50 [Hz ]) e dal numero di terne di espansioni polari
presenti nel motore.
Funzionamento
L’avviamento di questo tipo di motore è relativamente complesso. A motore fermo, l’applicazione della tensione alternata fa si che il rotore, per effetto dell’inerzia non abbia il tempo
di seguire il campo magnetico rotante, rimanendo fermo. Il motore viene quindi inizialmente
portato alla velocità di rotazione per mezzo di un motore asincrono, quindi, dopo avere scollegato quest’ultimo, viene collegata la tensione di alimentazione ed inserito il carico meccanico
utilizzatore. Un’altra tecnica di avviamento sfrutta la possibilità di fare funzionare temporaneamente come asincroni motori appositamente realizzati, quindi passare al modo sincrono. Se
una volta a regime la rotazione viene frenata o accelerata oltre un certo limite, si innesca una
serie di oscillazioni che portano il motore al blocco e possono provocare forti sovracorrenti tali
da danneggiare il motore. Per questo motivo va prevista una protezione dalle sovracorrenti, ad
esempio con un interruttore magnetotermico di protezione.
Utilizzi
A causa della limitata praticità del motore sincrono, il suo uso con alimentazione diretta dalla
rete è limitato a campi di applicazione ove sia richiesta una velocità di rotazione particolarmente
precisa e stabile. È invece molto usato per azionare carichi a velocità variabile ove alimentato
da convertitore statico (inverter).
Esistono anche piccoli motori sincroni ad avvio automatico ed alimentazione monofase utilizzati in meccanismi temporizzatori quali i timer delle lavatrici domestiche e un tempo in alcuni
orologi, sfruttando la buona precisione della frequenza della rete elettrica.
Particolarità
Se la macchina è provvista di avvolgimenti rotorici, al variare della corrente di eccitazione
che circola sul rotore, la rete elettrica di alimentazione può vedere un carico di tipo resistivo
(ohmico), induttivo o capacitivo:
• se il motore è sottoeccitato sarà visto come ohmico-induttivo;
• se il motore è eccitato adeguatamente può essere visto come carico puramente resistivo:
in questa condizione, che è quella di normale funzionamento, si ha il minimo assorbimento
di corrente ed il massimo rendimento;
89
Capitolo 6. MOTORI ELETTRICI
• se il motore è sovraeccitato, sarà visto come ohmico-capacitivo.
Il motore si presenta tanto più con caratteristica ohmica tanto maggiore è la coppia resistente
del carico che gli viene applicato all’albero. Se non si applica nessun carico e si alimenta il
motore per ottenere la caratteristica ohmico-capacitiva, si otterrà un compensatore rotante,
poiché la caratteristica ohmica sarà ridotta al minimo. Questo è utilizzato come sistema di
rifasamento soprattutto nelle centrali di trasformazione dell’energia elettrica. La quantità di
energia reattiva che può fornire il compensatore rotante è tanto maggiore quanto maggiore è la
sovraeccitazione della macchina. Il compensatore sincrono, o rifasatore rotante, è oggi perlopiù
sostituito da gruppi di rifasamento composti da condensatori statici.
6.4.3
Motore monofase
Il motore monofase è una tipologia di motori elettrici, che per funzionare richiede l’utilizzo d’una
linea elettrica con una fase elettrica e di un filo di neutro, di questi motori si possono avere
diverse applicazioni e forme costruttive, generalmente data la caratteristica non autoavviante
di questi motori vengono utilizzati motori bifase, dove ricavano la seconda fase tramite l’utilizzo
di un condensatore.
Tipologia
• motore asincrono, è il tipo di motore monofase piu utilizzato, data la sua economicità,
caratterizzato da una rotazione del campo magnetico indotto non sincronizzato al campo
magnetico dello statore, che quindi ruotano a frequenze diverse;
• motore sincrono, è il tipo di motore monofase meno utilizzato, date le poche applicazioni,
caratterizzato da una rotazione del campo magnetico indotto sincronizzato al campo
magnetico dello statore, che quindi ruotano alla stessa frequenza.
Collegamento
Questo motore a seconda della sua tipologia, viene collegato alla linea monofase in un unico
modo:
• serie singolo o parallelo singolo, sistema caratteristico dei motori monofase, dove vie è
presente un unico avvolgimento che necessita di un capo collegato alla fase e dall’altro
capo collegato al neutro;
• parallelo di serie, sistema utilizzato sui motori bifase, dove si ha l’avvolgimento di lavoro e d’avviamento in parallelo, ma con l’avvolgimento d’avviamento con in serie un
condensatore, che ha il compito di generare la seconda fase sfasata di 90 .
90
6.4. MOTORI IN CORRENTE ALTERNATA
Verso di rotazione
Figura 6.13: Collegamenti di un motore bifase
Il verso di rotazione del motore viene determinato in modo diverso a seconda del tip di
motore:
• motore monofase, questo motore non è autoavviante e non ha un senso di rotazione spe-
cifico, permettendo quindi all’operatore di decidere il verso di rotazione, facendo ruotare
meccanicamente il motore finché non è in grado di rimanere in rotazione;
• motore bifase, il motore bifase è autoavvianete e a seconda del tipo di collegamento
il motore ruota da un vero o dall’altro, per far ciò è sufficiente ruotare le piastrine di
collegamento tra l’avvolgimento di lavoro e d’avviamento, in modo che i capi di uno dei
due avvolgimenti vengano invertiti.
Indotto/rotore
L’indotto in questo motore è del tipo a gabbia di scoiattolo, a seconda del tipo d’accorgimenti
adoperati, questi possono essere di vari tipi:
• singola gabbia di scoiattolo: Costituito da una singola gabbia, caratterizzata barre d’allumini equidistanti dall’albero motore, collegate in parallelo tra loro;
91
Capitolo 6. MOTORI ELETTRICI
• doppia gabbia di scoiattolo: Si differenzia dalla singola gabbia di scoiattolo perché utilizza
una gabbia esterna e una piu interna, questo accorgimento permette d’avere una migliore
coppia ai bassi regimi di rotazione, infatti ai bassi regimi di rotazione il campo magnetico
indotto è piu vicino all’asse dell’indotto/rotore e utilizzando una gabbia di scoiattolo piu
piccola, quindi con barre piu vicine all’albero motore si riesce a fruttare meglio questo
campo magnetico;
• a barre profonde: Si differenzia dal precedente per via dell’utilizzo di una singola gabbia di
scoiattolo, ma che possiede delle barre allungate verso l’asse di rotazione, questo permette
d’avere una curva di coppia piu lineare rispetto al sistema a doppia gabbia di scoiattolo,
la quale è caratterizzata da un passaggio brusco con il cambio d’eccitazione della gabbia.
Motore misto
Il motore bifase una volta avviato può funzionare tranquillamente da motore monofase, questo è
possibile grazie all’utilizzo di un interruttore centrifugo, che portato a una determinata velocità
di rotazione diseccita l’avvolgimento d’avviamento del motore, riducendone i consumi elettrici.
6.4.4
Motore trifase
Il motore trifase è una tipologia di motori elettrici, che per funzionare richiede l’utilizzo di tre
fasi elettriche, sfasate tra di loro di 120 e a seconda del tipo di collegamento (stellare), può
essere utilizzato un filo di neutro, di questi motori si possono avere diverse applicazioni e forme
costruttive.
Tipologia
• motore asincrono, è il tipo di motore trifase piu utilizzato, data la sua economicità,
caratterizzato da una rotazione del campo magnetico indotto non sincronizzato al campo
magnetico dello statore, che quindi ruotano a frequenze diverse;
• motore sincrono, è il tipo di motore trifase, utilizzato principalmente come generatore di
corrente, caratterizzato da una rotazione del campo magnetico indotto sincronizzato al
campo magnetico dello statore, che quindi ruotano alla stessa frequenza.
Questo motore viene collegato alla linea trifase, dato che la linea trifase può essere da 220
[V ] o piu comunemente da 380 [V ] dato che l’avvolgimento che compongono il motore devono
essere alimentate a 220 [V ] questo collegamento può essere di due tipi:
92
6.4. MOTORI IN CORRENTE ALTERNATA
Figura 6.14: Collegamenti a triangolo (sinistra) e stella (destra) di un motore trifase
• stella, questo collegamento permette portare la tensione da 380 [V ] della linea ai 220 [V ]
sugli avvolgimenti, ma nel caso di linea da 220 [V ], può essere utilizzato anche per ridurre
ulteriormente la tensione d’esercizio e ridurre la potenza assorbita, in questo caso si ha
una tensione ai capi degli avvolgimenti pari a 155 [V ];
• triangolo, questo collegamento conferisce agli avvolgimenti la stessa tensione della linea.
Per il verso di rotazione in qualsiasi tipo di collegamento, per poter scambiare il senso di
rotazione è sufficiente scambiare due fasi (come la fase “R” con la fase “T” oppure la fase “S”
con la fase “T” oppure la fase “R” con la fase “S”).
Indotto/rotore
L’indotto in questo motore è del tipo a gabbia di scoiattolo, a seconda del tipo d’accorgimenti
adoperati, questi possono essere di vari tipi:
• singola gabbia di scoiattolo: Costituito da una singola gabbia, caratterizzata barre d’allumini equidistanti dall’albero motore, collegate in parallelo tra loro;
• doppia gabbia di scoiattolo: Si differenzia dalla singola gabbia di scoiattolo perché utilizza
una gabbia esterna e una piu interna, questo accorgimento permette d’avere una migliore
coppia ai bassi regimi di rotazione, infatti ai bassi regimi di rotazione il campo magnetico
indotto è piu vicino all’asse dell’indotto/rotore e utilizzando una gabbia di scoiattolo piu
93
Capitolo 6. MOTORI ELETTRICI
piccola, quindi con barre piu vicine all’albero motore si riesce a fruttare meglio questo
campo magnetico;
• a barre profonde: Si differenzia dal precedente per via dell’utilizzo di una singola gabbia di
scoiattolo, ma che possiede delle barre allungate verso l’asse di rotazione, questo permette
d’avere una curva di coppia piu lineare rispetto al sistema a doppia gabbia di scoiattolo,
la quale è caratterizzata da un passaggio brusco con il cambio d’eccitazione della gabbia.
6.5
Motore CC con statore a filo avvolto
Nei motori CC lo statore può essere realizzato non con magneti permanenti ma, similmente
al rotore, con avvolgimenti su materiale ad alta permeabilità in cui viene fatta scorrere della
corrente: questo circuito è detto di eccitazione. In questo modo si possono avere potenze
maggiori (ma si dovrà spendere più energia anche per alimentare questo nuovo circuito). Si
possono avere vari casi nell’alimentazione del circuito di statore:
• motore ad eccitazione indipendente: l’avvolgimento di statore è alimentato in maniera
indipendente da quello di rotore. Si ha allora più flessibilità nel controllo dei parametri
(coppia e velocità) del motore;
• motore ad eccitazione in parallelo: statore e rotore sono collegati in parallelo (coppia
maggiore, minore velocità);
• motore ad eccitazione in serie: statore e rotore sono collegati in serie (coppia inferiore e
asintotica allo zero con l’aumentare del regime, maggiore velocità, definito anche come
motore in fuga).
Si possono avere anche situazioni intermedie utilizzate in passato soprattutto nella trazione
elettrica (dove è richiesta molta coppia allo spunto e maggiore velocità a regime).
Il motore con statore a filo avvolto può essere alimentato sia in corrente continua che in
alternata, e per questo motivo è chiamato anche motore universale; di fatto, nella maggior parte
delle applicazioni, questo tipo di motore è alimentato in corrente alternata. La disponibilità a
costi contenuti di dispositivi elettronici (come circuiti integrati, ponti raddrizzatori, dispositivi
di potenza a semiconduttore, ecc.), alcune applicazioni che in passato sarebbero state realizzate con motori universali ora vengono sviluppate con motori CC con magneti permanenti,
permettendo ad esempio un controllo della velocità più preciso e rendimento elettrico maggiore (nei piccoli motori la potenza spesa per l’eccitazione è spesso rilevante, mentre diviene
percentualmente esigua nei grandi motori).
94
Appendice
Software e fonti
A.1
Software
• Per la stesura dell’elaborato:
LATEX. http://www.latex-project.org/
A.2
Fonti
• Wikipedia: http://www.wikipedia.it/
A