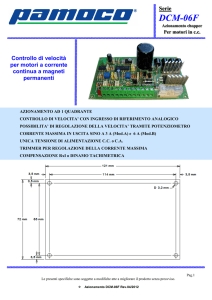
Guida all’installazione rapida di Optidrive HVAC
OPTIDRIVE HVAC (Taglie da 4 a 7).
Installazione meccanica
Informazioni a pag. 10, sezione 3.5
Display
(Stato, Diagnostica e Programmazione)
Informazioni sul funzionamento del
tastierino a pag. 16, sezione 5.1
Morsettiera di controllo
Impostata sui parametri di fabbrica
(default)
Funzione arresto in sicurezza Safe
Torque Off (STO)
Collegare i morsetti come mostrato
attraverso i circuiti di arresto di
emergenza
Supply Voltage
Avvio / Arresto
Potenziometro 10K
Chiudere l’interruttore per avviare
l’azionamento, aprirlo per arrestarlo
Cavo motore
Per le sezioni corrette, verificare i dati
tecnici a pag. 51, sezione 13.4.
Non superare la lunghezza massima
consentita.
Si raccomanda l'uso di un filtro di uscita
per cavi motore di lunghezza superiore
a 50 metri.
Utilizzare un cavo schermato, collegato
a terra da entrambe le estremità.
Fusibili o
magnetorermici
Verificare i valori
nominali a
pag. 51, sezione
13.4
PE
L1 L2 L3
Collegamento CA
200 – 240 V + / - 10%
380 – 380 V + / - 10%
Verificare i valori nominali a
pag. 51, sezione 13.2
M
Collegamento motore
Controllare il collegamento a stella o a
triangolo. Inserire i dati di targa del
motore nei parametri
dell'azionamento:
Tensione nominale motore: P1-07
Corrente nominale motore: P1-08
Frequenza nominale motore: P1-09
Velocità nominale motore (opzionale):
P1-10
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
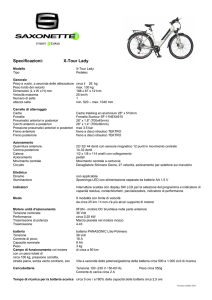
Guida all’installazione rapida di Optidrive HVAC
OPTIDRIVE HVAC (Taglie 2 e 3).
Installazione meccanica
Informazioni a pag. 9, sezione 3.4
Display HVAC
(Stato, Diagnostica e Programmazione)
Solo nella versione con
sezionatore integrato:
Alimentazione principale On / Off
Informazioni sul Funzionamento del
tastierino a pag. 16, sezione 5.1
Morsettiera di controllo
Impostata sui parametri di fabbrica
(default)
Funzione arresto in sicurezza Safe
Torque Off (STO)
Collegare i morsetti come mostrato
attraverso i circuiti di arresto di
emergenza
Avvio / Arresto Potenziometro 10K
Fusibili o
magnetotermici
Verificare I valori
nominali a
pag. 51, sezione
13.4
Chiudere l’interruttore per avviare
l’azionamento, aprirlo per arrestarlo
Dimensioni del Cavo motore
Verificare i dati tecnici a pag. 58,
sezione 13.4
PE
L1 L2 L3
Collegamento CA
200 – 240 V + / - 10% : mono/trifase
380 – 380 V + / - 10% : trifase
Verificare i valori nominali a pag. 51,
sezione 13.2
M
www.invertek.co.uk
Collegamento motore
Controllare il collegamento a stella o a
triangolo secondo la tensione nominale
motore, come indicato a pag. 14, sezione
4.5
Dati di targa motore
Tensione nominale motore: P1-07
Corrente nominale motore: P1-08
Frequenza nominale motore: P1-09
Velocità nominale motore (opzionale):
P1-10
3
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Dichiarazione di conformità:
Invertek Drives Ltd. dichiara che la gamma di prodotti Optidrive HVAC è conforme alla Direttiva Bassa Tensione 2006/95/EC e alla Direttiva
Europea sulla Compatibilità Elettromagnetica EMC 2004/108/EC, e che è stata progettata e fabbricata in conformità alle seguenti norme
europee:
EN 61800-5-1: 2003
Azionamenti elettrici a velocità variabile. Prescrizioni di sicurezza - Sicurezza elettrica, termica ed energetica
nd
EN 61800-3 2 Ed: 2004
Azionamenti elettrici a velocità variabile (EMC parte 3). Requisiti di compatibilità elettromagnetica e
metodi di prova specifici
Apparecchi industriali, scientifici e medicali (ISM) - Caratteristiche di radiodisturbo - Limiti e metodi di
misura
Gradi di protezione degli involucri (Codice IP)
EN 55011: 2007
EN60529 : 1992
Compatibilità Elettromagnetica
Tutti i prodotti della gamma Optidrive sono stati progettati per elevati standard EMC. Tutte le versioni con funzionamento ad alimentazione
monofase 230 V e trifase 400 V, e intese per l'utilizzo all'interno dell'Unione Europea, contengono un filtro EMC interno. Tale filtro EMC è
progettato per ridurre le emissioni condotte nell'azionamento attraverso i cavi di alimentazione elettrica, in accordo con gli standard europei
di riferimento.
L’installatore ha la responsabilità di assicurarsi che l’apparecchio o il sistema nel quale il prodotto viene incorporato risponda alla legislazione
EMC in vigore nel Paese di utilizzo. Nell’ambito dell’UE, le apparecchiature nelle quali è stato installato il prodotto devono essere conformi alle
norme 2004/108/EC sulla Compatibilità Elettromagnetica. Utilizzando un prodotto Optidrive con filtro interno o esterno opzionale, si può
ottenere la conformità per le seguenti categorie EMC, come definite dalla norma EN61800-3:2004:
Tipo di azionamento/
Tensione
ODV-2-x2xxx-xxBxx /
Alimentazione monofase
230 V
Cat C1
Non è necessario alcun filtro addizionale
Utilizzare un cavo motore schermato
Categorie EMC
Cat C2
Cat C3
ODV-2-x4xxx-xxAxx /
Utilizzare un filtro esterno
Non è necessario alcun filtro addizionale
Alimentazione trifase
OD-Fx34x
400 V
Utilizzare un cavo motore schermato
Per cavi motore di lunghezza superiore a 100 metri è necessario usare un filtro d’uscita; per ulteriori dettagli, consultare il Catalogo
Note
Invertek relativo agli Azionamenti
Tutti i diritti riservati. È fatto divieto di riprodurre o trasmettere questo manuale in qualsiasi forma o con qualsiasi mezzo, elettrico o
meccanico incluse fotocopie, registrazioni o con l’utilizzo di sistemi di memorizzazione o reperimento senza il consenso scritto dell’editore.
Copyright Invertek Drives Ltd © 2011
Tutti i prodotti della gamma Invertek Optidrive HVAC hanno una garanzia di 2 anni dalla data di produzione per eventuali difetti di
fabbricazione. Il produttore non risponde di alcuna conseguenza per i danni derivanti da trasporto, consegna, installazione o avviamento. Il
produttore non risponde inoltre dei danni o delle conseguenze derivanti dall'installazione inappropriata, negligente o non corretta
dell'azionamento, né di modifiche dei parametri di lavoro opzionali o dell’errato collegamento dell'azionamento al motore, errata
installazione, esposizione a polvere, umidità, sostanze corrosive, vibrazioni intense o temperature oltre le specifiche indicate.
Il distributore locale potrebbe offrire a propria discrezione termini e condizioni differenti, e in tutti i casi che concernono la garanzia il
distributore locale va contattato per primo.
Il contenuto di questo manuale è da ritenersi veritiero al momento della stampa. Nell’ottica dell’impegno verso un continuo miglioramento, il
produttore si riserva il diritto di modificare le specifiche di prodotto, le sue prestazioni o i contenuti del manuale senza darne notizia.
Il presente Manuale d'uso è inteso per l'utilizzo con la versione Firmware 0.40
Manuale d'uso - Revisione 1.00
Nell'ottica dell'impegno verso un continuo miglioramento da parte di Invertek Drives Ltd e quantunque sia stato profuso il massimo impegno
per fornire informazioni accurate ed aggiornate, le informazioni contenute in questo Manuale d'uso si considerano valide ai fini dei soli
supporto e assistenza e non costituiscono parte del contratto.
4
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
1.
Introduzione .............................................................................................................................................................................. 6
1.1.
Informazioni importanti sulla sicurezza............................................................................................................................................................... 6
2.
Informazioni generali e valori nominali ...................................................................................................................................... 7
2.1.
Modelli dell'azionamento .................................................................................................................................................................................... 7
2.2.
Identificazione del codice del modello dell’azionamento ................................................................................................................................... 7
3.
Installazione meccanica ............................................................................................................................................................. 8
3.1.
Generale .............................................................................................................................................................................................................. 8
3.2.
Prima dell'installazione ....................................................................................................................................................................................... 8
3.3.
Installazione conforme alle norme UL ................................................................................................................................................................. 8
3.4.
Dimensioni meccaniche e installazione – Taglie 2 e 3 ......................................................................................................................................... 8
3.5.
Dimensioni meccaniche e installazione – Taglie da 4 a 7 ................................................................................................................................... 9
3.6.
Linee guida per l'installazione ............................................................................................................................................................................. 9
3.7.
Rimozione del pannello frontale ....................................................................................................................................................................... 10
4.
Installazione elettrica ............................................................................................................................................................... 11
4.1.
Messa a terra dell'azionamento ........................................................................................................................................................................ 11
4.2.
Precauzioni per il cablaggio ............................................................................................................................................................................... 11
4.3.
Collegamento alla rete elettrica ........................................................................................................................................................................ 11
4.4.
Collegamento dell'azionamento al motore ....................................................................................................................................................... 12
4.5.
Collegamenti della morsettiera del motore ...................................................................................................................................................... 12
4.6.
Cablaggio dei segnali di controllo ...................................................................................................................................................................... 13
4.7.
Schema di collegamento della morsettiera di controllo .................................................................................................................................... 13
4.8.
Collegamenti della morsettiera ......................................................................................................................................................................... 13
5.
Funzionamento del tastierino .................................................................................................................................................. 14
5.1.
Funzione e utilizzo dei tasti ............................................................................................................................................................................... 14
5.2.
Aspetto del display con l’azionamento in funzione ........................................................................................................................................... 14
5.3.
Accesso e modifica dei valori dei parametri ...................................................................................................................................................... 14
5.4.
Ripristino delle impostazioni di fabbrica ........................................................................................................................................................... 15
5.5.
Ripristino dei parametri predefiniti ................................................................................................................................................................... 15
5.6.
Selezione della lingua sul display OLED ............................................................................................................................................................. 16
5.7.
Selezione della Modalità manuale / automatica ............................................................................................................................................... 16
6.
Messa in servizio ...................................................................................................................................................................... 17
6.1.
Generale ............................................................................................................................................................................................................ 17
7.
Impostazione funzionalità specifiche HVAC (menù 8) ............................................................................................................... 18
7.1.
Funzione multipompe – controllo di pompe ausiliarie a velocità fissa .............................................................................................................. 18
7.2.
Funzione multipompe – controllo multiplo di pompe ausiliarie a velocità variabile ......................................................................................... 19
7.3.
Impostazione e ripristino del tempo mancante alla manutenzione .................................................................................................................. 20
7.4.
Controllo del profilo di carico ............................................................................................................................................................................ 21
7.5.
Pulizia della pompa ........................................................................................................................................................................................... 22
7.6.
Funzione antideposito ....................................................................................................................................................................................... 24
7.7.
Modalità Bypass ................................................................................................................................................................................................ 25
7.8.
Modalità incendio ............................................................................................................................................................................................. 27
7.9.
Pre-riscaldamento del motore e iniezione di tensione continua ....................................................................................................................... 28
8.
Applicazioni del controllo PID .................................................................................................................................................. 30
8.1.
Panoramica ....................................................................................................................................................................................................... 30
8.2.
Impostazione della funzione PID ....................................................................................................................................................................... 30
8.3.
Esempi di applicazioni ....................................................................................................................................................................................... 33
9.
Parametri................................................................................................................................................................................. 34
9.1.
Impostazione generale dei parametri ............................................................................................................................................................... 34
9.2.
Gruppo 1 – Parametri di base............................................................................................................................................................................ 34
10. Configurazione ingressi digitali ................................................................................................................................................. 36
10.1. Configurazione ingressi digitali - Parametri P1-13............................................................................................................................................. 36
11. Parametri estesi ....................................................................................................................................................................... 37
11.1. Gruppo 2 – Parametri estesi.............................................................................................................................................................................. 37
11.2. Gruppo 3 – Controllo retroazione (controllo PID) ............................................................................................................................................. 42
11.3. Gruppo 4 – Controllo motore ad alte prestazioni.............................................................................................................................................. 43
11.4. Gruppo 5 – Parametri di comunicazione ........................................................................................................................................................... 43
11.5. Gruppo 6 – Configurazione impostazioni avanzate ........................................................................................................................................... 44
11.6. Gruppo 7 – Parametri riservati (non disponibili) ............................................................................................................................................... 45
11.7. Gruppo 8 – Funzioni specifiche HVAC ............................................................................................................................................................... 45
11.8. Gruppo 9 – Impostazione avanzata logica di controllo dell’azionamento ......................................................................................................... 46
11.9. Gruppo 0 – Monitoraggio parametri in tempo reale (solo lettura) ................................................................................................................... 47
12. Comunicazioni seriali ............................................................................................................................................................... 49
12.1. Interfaccia RS-485 ............................................................................................................................................................................................. 49
12.2. Interfaccia ModbusRTU ..................................................................................................................................................................................... 49
13. Specifiche tecniche .................................................................................................................................................................. 51
13.1. Ambiente ........................................................................................................................................................................................................... 51
13.2. Tensione di alimentazione................................................................................................................................................................................. 51
13.3. Alimentazione massima consentita in conformità alle norme UL ..................................................................................................................... 51
13.4. Potenza e corrente di uscita .............................................................................................................................................................................. 51
14. Tavola per la modifica dei parametri ........................................................................................................................................ 53
15. Risoluzione dei problemi .......................................................................................................................................................... 55
15.1. Messaggi di errore ............................................................................................................................................................................................. 55
www.invertek.co.uk
5
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
1. Introduzione
1.1. Informazioni importanti sulla sicurezza
Leggere attentamente le INFORMAZIONI IMPORTANTI SULLA SICUREZZA, e tutte le Avvertenze e Precauzioni.
Pericolo : Indica il rischio di uno shock elettrico che, se non
Pericolo : Indica una situazione potenzialmente
opportunamente evitato, può comportare il
pericolosa diversa dallo shock elettrico che, se non
danneggiamento dell'apparecchio e provocare il possibile
opportunamente evitata, può comportare un danno
ferimento o morte.
del dispositivo.
Il presente azionamento a velocità (Optidrive) è inteso per essere inserito professionalmente in apparecchiature complete o in
sistemi come parte di un'installazione fissa. Se installato in maniera non corretta, può rappresentare un pericolo per la sicurezza.
Optidrive utilizza tensioni e correnti elevate, immagazzina un consistente quantità di energia elettrica, viene utilizzato per il
controllo di impianti meccanici che possono causare ferimento. Prestare attenzione alla programmazione del sistema e
all'installazione elettrica, per evitare rischi sia durante l'utilizzo corretto che in caso di malfunzionamento. È permessa solo a
personale qualificato l'installazione e la messa in funzione di questo prodotto.
La programmazione del sistema, l'installazione, la messa in funzione e la manutenzione devono essere eseguite esclusivamente da
persone con le indispensabili competenze ed esperienza. Queste devono leggere con attenzione la presente informativa di
sicurezza e le istruzioni presenti su questa Guida, e seguire tutte le informazioni riportate inerenti al trasporto, manutenzione,
installazione e messa in funzione dell’Optidrive, comprese le specifiche limitazioni ambientali.
Non eseguire alcun flash test o prova di isolamento di tensione con Optidrive. Qualunque tipo di misurazione elettrica va eseguita
con l’Optidrive disconnesso.
Pericolo di shock elettrico! Disconnettere e ISOLARE Optidrive prima di tentare qualunque tipo di intervento sul dispositivo. Sono
presenti alte tensioni nei terminali e nell'azionamento fino a 10 minuti dalla disconnessione dell'alimentazione elettrica. Assicurarsi
sempre attraverso un multimetro che non sia presente tensione in nessuno dei morsetti di alimentazione dell'azionamento prima
di iniziare qualunque tipo di intervento.
Quando l'alimentazione dell’azionamento avviene attraverso una spina inserita in una presa di corrente, non disconnettere il
dispositivo per 10 minuti dall'interruzione di alimentazione.
Assicurarsi che i collegamenti a terra siano eseguiti correttamente. Il cavo a terra deve essere sufficiente a trasportare la corrente
di guasto massima dell'alimentazione che normalmente è limitata dai fusibili o dagli interruttori magnetotermici (MCB). I fusibili e
gli interruttori magnetotermici devono essere collegati all'azionamento attraverso l'alimentazione principale, conformemente alla
legislazione e alle norme vigenti in materia.
Non eseguire alcun intervento sui cavi di controllo dell'azionamento quando questo o i circuiti di controllo esterni sono alimentati.
All'interno dell'Unione Europea, tutti gli apparecchi in cui questo prodotto viene utilizzato devono ottemperare alla Direttiva
Macchine 98/37/EC. In particolare, il produttore dell'apparecchio è responsabile della fornitura di un interruttore principale e deve
assicurarsi che l'apparecchiatura elettrica sia conforme alla norma EN60204-1.
Il livello di integrità offerto dalle funzioni di controllo di ingresso dell’Optidrive (fatta esclusione per la funzione "Ingresso Safe
Torque") – per esempio arresto/avvio, marcia in avanti/marcia indietro e velocità massima, non è sufficiente per l'utilizzo in
applicazioni critiche dal punto di vista della sicurezza senza canali di protezione indipendenti. Tutte le applicazioni in cui il
malfunzionamento potrebbe causare ferimento o perdita della vita devono essere soggette all'accertamento dei rischi e a ulteriori
forme di protezione ove necessario.
Il motore può entrare in funzione se è presente un segnale in ingresso.
La funzione di STOP non rimuove il rischio di tensione elevata potenzialmente letale. ISOLARE l'azionamento ed attendere 10 minuti
prima di iniziare qualunque tipo di intervento. Non effettuare mai alcun intervento sull' azionamento, sul motore o sul cavo motore
quando l'alimentazione è presente.
Optidrive può essere programmato per azionare il motore a velocità superiori o inferiori alla velocità raggiunta collegando
direttamente il motore all'alimentazione principale. Chiedere conferma ai produttori del motore e dell'apparecchio circa la
possibilità di operazioni oltre la velocità prevista prima di accendere l'apparecchio.
Non attivare la funzione di ripristino automatico dopo un errore in qualunque sistema ove il riavvio potrebbe causare una
situazione potenzialmente pericolosa.
Optidrive ODV-2 ha un grado di protezione dell’involucro IP55, e si intende per esclusivo uso interno.
Durante l'installazione dell'azionamento, assicurarsi che sia presente un sufficiente spazio di ventilazione. Non eseguire
perforazioni sul dispositivo, polvere e trucioli derivanti dalla lavorazione potrebbero provocare danni all'apparecchio.
Evitare l'ingresso di corpi esterni conduttivi o infiammabili. Non posizionare materiale infiammabile in prossimità dell'azionamento.
L'umidità relativa deve essere inferiore al 95% (senza condensa).
Assicurarsi che la tensione di alimentazione, la frequenza e il tipo di fasi (monofase o trifase) corrispondano al valore dichiarato
dell’Optidrive.
Non collegare mai l'alimentazione principale con i morsetti di uscita U, V, W.
Non installare alcun tipo di interruttore automatico tra l'azionamento e il motore.
Ogniqualvolta il cablaggio di controllo è vicino al cablaggio di alimentazione, mantenere una distanza minima di 100 mm e
predisporre incroci a 90°. Assicurarsi che tutti i morsetti siano serrati con una coppia opportuna.
Non provare ad eseguire alcun tipo di riparazione sull'Optidrive. In caso di errore o malfunzionamento, contattare il Distributore
Autorizzato Invertek Drives di zona.
6
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
2. Informazioni generali e valori nominali
2.1. Modelli dell'azionamento
Alimentazione monofase - 200-240 V ±10%
Modelli kW
kW
Con Filtro
ODV-2-22075-1KF1N
ODV-2-22150-1KF1N
ODV-2-22220-1KF1N
Alimentazione trifase - 200-240 V ±10%
Modelli kW
Con Filtro
ODV-2-22075-3KF1N
ODV-2-22150-3KF1N
ODV-2-22220-3KF1N
ODV-2-32040-3KF1N
ODV-2-42055-3KF1N
ODV-2-42075-3KF1N
ODV-2-42110-3KF1N
ODV-2-52150-3KF1N
ODV-2-52185-3KF1N
ODV-2-62022-3KF1N
ODV-2-62030-3KF1N
ODV-2-62037-3KF1N
ODV-2-62045-3KF1N
ODV-2-72055-3KF1N
ODV-2-72075-3KF1N
ODV-2-72090-3KF1N
Alimentazione trifase - 380-480 V ±10%
Modelli kW
Con Filtro
ODV-2-24075-3KF1N
ODV-2-24150-3KF1N
ODV-2-24220-3KF1N
ODV-2-24400-3KF1N
ODV-2-34055-3KF1N
ODV-2-34075-3KF1N
ODV-2-44110-3KF1N
ODV-2-44150-3KF1N
ODV-2-44185-3KF1N
ODV-2-44220-3KF1N
ODV-2-54300-3KF1N
ODV-2-54370-3KF1N
ODV-2-54450-3KF1N
ODV-2-64055-3KF1N
ODV-2-64075-3KF1N
ODV-2-64090-3KF1N
ODV-2-64110-3KF1N
ODV-2-74132-3KF1N
ODV-2-74160-3KF1N
Modelli HP
Con Filtro
HP
Corrente
d’uscita (A)
Taglia
0,75
1,5
2,2
ODV-2-22010-1HF1N
ODV-2-22020-1HF1N
ODV-2-22030-1HF1N
1
2
3
4,3
7
10,5
2
2
2
kW
Modelli HP
Con Filtro
HP
Corrente
d’uscita (A)
Taglia
0,75
1,5
2,2
4,0
5,5
7,5
11
15
18,5
22
30
37
45
55
75
90
ODV-2-22010-3HF1N
ODV-2-22020-3HF1N
ODV-2-22030-3HF1N
ODV-2-32050-3HF1N
ODV-2-42075-3HF1N
ODV-2-42100-3HF1N
ODV-2-42150-3HF1N
ODV-2-52020-3HF1N
ODV-2-52025-3HF1N
ODV-2-62030-3HF1N
ODV-2-62040-3HF1N
ODV-2-62050-3HF1N
ODV-2-62060-3HF1N
ODV-2-72075-3HF1N
ODV-2-72100-3HF1N
ODV-2-72120-3HF1N
1
2
3
5
7,5
10
15
20
25
30
40
50
60
75
100
120
4,3
7
10,5
18
25
39
46
61
72
90
110
150
180
202
240
300
2
2
2
3
3
4
4
5
5
5
6
6
6
6
7
7
kW
Modelli HP
Con Filtro
HP
Corrente
d’uscita (A)
Taglia
0,75
1,5
2,2
4
5,5
7,5
11
15
18,5
22
30
37
45
55
75
90
110
132
160
ODV-2-24010-3HF1N
ODV-2-24020-3HF1N
ODV-2-24030-3HF1N
ODV-2-24050-3HF1N
ODV-2-34075-3HF1N
ODV-2-34100-3HF1N
ODV-2-44150-3HF1N
ODV-2-44200-3HF1N
ODV-2-44250-3HF1N
ODV-2-44300-3HF1N
ODV-2-54040-3HF1N
ODV-2-54050-3HF1N
ODV-2-54060-3HF1N
ODV-2-64075-3HF1N
ODV-2-64120-3HF1N
ODV-2-64150-3HF1N
ODV-2-64175-3HF1N
ODV-2-74200-3HF1N
ODV-2-74250-3HF1N
1
2
3
5
7.5
10
15
20
25
30
40
50
60
75
120
150
175
200
250
2.2
4.1
5.8
9.5
14
18
24
30
39
46
61
72
90
110
150
180
202
240
300
2
2
2
2
3
3
4
4
4
4
5
5
5
6
6
6
6
7
7
2.2. Identificazione del codice del modello dell’azionamento
Tutti gli azionamenti sono identificati dal numero di serie del modello, come illustrato sotto. Il numero di serie si trova sull’etichetta di
spedizione e sulla targa dell’azionamento, e comprende anche informazioni sulle opzioni dell’azionamento e di fabbricazione.
www.invertek.co.uk
7
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
3. Installazione meccanica
3.1. Generale
Installare l'Optidrive esclusivamente in posizione verticale, su supporto piatto, ignifugo e resistente alle vibrazioni, utilizzando i fori di
montaggio predisposti.
Installare l'Optidrive unicamente in ambienti con classe di inquinamento 1 o 2.
Non collocare materiali infiammabili vicino all'Optidrive.
Assicurarsi che lo spazio di ventilazione minimo sia libero da ingombri, come illustrato in dettaglio nella sezione 3.
Assicurarsi che la temperatura dell'ambiente circostante non superi i limiti consentiti, come indicato nella sezione 13.1.
Predisporre un'adeguata ventilazione, priva di umidità e sostanze contaminanti, per permettere all'Optidrive di raffreddarsi come
illustrato nella sezione 11.2.
3.2. Prima dell'installazione
Estrarre con cura dalla confezione l'Optidrive e verificare la sua integrità. Contattare immediatamente il corriere se sono presenti
segni di danneggiamento.
Controllare l'etichetta dell'azionamento per assicurarsi che le caratteristiche del modello e dell'alimentazione siano quelle corrette.
Conservare l'Optidrive nella sua scatola fino all'utilizzo. La conservazione deve avvenire in un luogo secco e asciutto e a una
temperatura compresa fra –40°C e +60°C.
3.3. Installazione conforme alle norme UL
Prendere nota dei seguenti punti per procedere con l'installazione conforme alle norme UL:
L'azionamento può essere messo in funzione in un ambiente sottoposto a temperature come indicato nella sezione 13.1.
È consentita l'installazione in un ambiente con classe di inquinamento 2.
Utilizzare morsetti e capicorda conformi UL per tutti i collegamenti della barra di distribuzione e di terra.
3.4. Dimensioni meccaniche e installazione – Taglie 2 e 3
Taglia
A
mm
257
310
2
3
B
in
10,12
12,20
mm
220
276,5
D
in
8,67
10,89
mm
200
251,5
Coppia di serraggio morsetti di controllo :
Coppia di serraggio morsetti di potenza :
8
E
in
7,87
9,90
mm
28,5
33,4
F
in
1,12
1,31
Tutte le taglie :
Tutte le taglie :
mm
238
256
G
in
9,37
10,08
mm
188
210,5
0.8 Nm (7 lb-in)
1 Nm (8.85 lb-in)
www.invertek.co.uk
H
in
7,40
8,29
mm
176
197,5
I
in
6,93
7,78
mm
4,2
4,2
J
in
0,17
0,17
mm
8,5
8,5
in
0,33
,.33
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
3.5. Dimensioni meccaniche e installazione – Taglie da 4 a 7
Drive
Size
4
5
6
7
A
mm
440
540
865
1280
B
in
17.32
21.26
34.06
50.39
mm
418
515
830
1245
in
16.46
20.28
32.68
49.02
C
mm
423
520
840
1255
Coppia di serraggio morsetti di controllo :
Coppia di serraggio morsetti di potenza:
in
16.65
20.47
33.07
49.41
D
mm
8
8
10
10
E
in
0.315
0.315
0.394
0.394
mm
230
270
340
370
F
in
9.06
10.63
13.39
14.57
mm
173
235
290
330
G
in
6.81
9.25
11.42
12.99
mm
110
175
200
200
H
in
4.33
6.89
7.87
7.87
mm
4.25
4.25
5.5
5.5
I
in
0.167
0.167
0.217
0.217
mm
7.5
7.5
11
11
in
0.295
0.295
0.433
0.433
Tutte le taglie: 0.8 Nm (7 lb-in)
Taglia 4: 1,2 – 1,5 Nm / Taglia 5: 2,5 – 4,5 Nm / Taglia 6: 8 Nm / Taglia 7: 8 Nm
3.6. Linee guida per l'installazione
Prima di procedure con l’installazione, assicurarsi che il luogo prescelto sia conforme ai requisiti ambientali illustrati nella sez. 13.1.
L’azionamento deve essere installato in posizione verticale, su una supporto piatto
Osservare le distanze minime indicate nella tabella sottostante
Il luogo di installazione ed il supporto devono poter sopportare il peso degli azionamenti.
Taglia
4
5
6
7
X
Spazio sopra e sotto
Y
Da entrambi i lati
mm
in
mm
in
200
200
200
200
7,87
7,87
7,87
7,87
10
10
10
10
0,394
0,394
0,394
0,394
Note :
La perdita di calore tipica dell' azionamento ammonta al
3% delle condizioni di carico operative.
Le indicazioni di cui sopra sono da ritenersi semplici
linee guida, e la gamma di temperature ambientali
consentite DEVE essere sempre rispettata.
www.invertek.co.uk
9
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
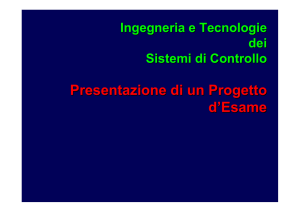
3.7. Rimozione del pannello frontale
3.7.1. Taglia 4
Utilizzando un cacciavite a lama
piatta, ruotare le due viti di
supporto indicate in figura fino a
che gli intagli delle viti si trovano in
posizione verticale.
3.7.2. Taglia 5
Utilizzando un cacciavite a
lama piatta, ruotare le quattro
viti di supporto indicate in
figura fino a che gli intagli delle
viti si trovano in posizione
verticale.
Apertura/chiusura delle viti del pannello frontale
3.7.3. Taglia 6
Rimuovere le due viti indicate in figura, spostare il pannello frontale in avanti e successivamente sollevarlo. Per riposizionare il pannello, far
scivolare le alette fino alla parte superiore del quadro, e poi riavvitare le viti nella parte inferiore.
10
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
4. Installazione elettrica
4.1. Messa a terra dell'azionamento
Il presente manuale è da considerarsi una guida per l'installazione. Invertek Drives Ltd non si assume alcuna responsabilità circa
la conformità o non conformità alle normative vigenti, o ancora circa la corretta installazione dell'azionamento o delle
apparecchiature associate. Esiste il pericolo di ferimento e/o danneggiamento dell'apparecchiatura se vengono ignorate le
norme durante la procedura di installazione.
Optidrive contiene condensatori per alta tensione che impiegano un certo tempo a scaricarsi dopo l'interruzione
dell'alimentazione principale. Prima di eseguire qualunque tipo di operazione sull'azionamento, assicurarsi che il cavo di
alimentazione principale sia scollegato. Attendere dieci (10) minuti per permettere ai condensatori di scaricarsi fino a livelli di
tensione sicuri. La non osservazione di tali precauzioni potrebbe portare a ferimento o perdita della vita.
Solo personale qualificato che ha familiarità con l'architettura ed il funzionamento di questo apparecchio e con i rischi correlati
dovrebbe installare, regolare, far funzionare o riparare il presente dispositivo. Leggere attentamente il presente manuale ed
altre pubblicazioni correlate prima di procedere. La mancata osservazione di tali precauzioni potrebbe tradursi in ferimento o
perdita della vita.
4.1.1. Indicazioni per la messa a terra
Il morsetto di terra di ciascun Optidrive deve essere singolarmente collegato DIRETTAMENTE alla barra di terra (o attraverso il filtro se
installato). Le connessioni di terra dell’Optidrive non devono creare anelli fra un azionamento e l’altro o con altre apparecchiature.
L’impedenza del collegamento di terra deve essere conforme alle norme di sicurezza locali. Per adeguarsi alle norme UL, tutti i collegamenti di
terra devono essere effettuati utilizzando morsetti e capicorda certificati UL.
Il morsetto di terra dell’azionamento deve essere collegato a terra. L’impedenza a terra deve essere conforme alle norme di sicurezza locali
sugli impianti elettrici e industriali. Controllare periodicamente l’integrità di tutti i collegamenti a terra.
4.1.1. Conduttore di protezione PE
La sezione del conduttore di protezione PE deve essere almeno equivalente a quella del conduttore di alimentazione in ingresso.
4.1.2. Messa a terra in sicurezza
Questo simbolo individua il morsetto per la messa a terra in sicurezza per l’azionamento, come richiesto dalle norme. Uno di questi punti deve
essere collegato all’adiacente struttura portante dell’edificio (travi, putrelle), a un picchetto di messa a terra o a una barra equipotenziale. I
punti di messa a terra devono essere conformi alle norme di sicurezza locali sugli impianti elettrici e industriali.
4.1.1. Messa a terra del motore
Il morsetto di terra del motore deve essere collegato a uno dei morsetti di terra dell’azionamento.
4.1.1. Monitoraggio guasti a terra
Come per tutti gli inverter, può succedere che insorgano correnti di dispersione verso terra. L’Optidrive è progettato per disperdere meno
corrente possibile, nel rispetto degli standard internazionali. Il livello di corrente è determinato dalla lunghezza e dal tipo del cavo motore,
dall’effettiva frequenza di commutazione, dai collegamenti a terra usati e dal tipo di filtro RFI installato. Se si utilizza un interruttore
automatico di protezione di tipo ELCB (Earth Leakage Circuit Breaker), rispettare le seguenti indicazioni:
Utilizzare un apparecchio di Tipo B
L’apparecchio deve essere adatto a proteggere il dispositivo con una componente a corrente continua nella corrente di dispersione
Utilizzare un singolo interruttore ELCB per ogni Optidrive
4.1.2. Schermatura dei cavi
Il morsetto di terra offre un punto di messa a terra per la schermatura del cavo motore. La schermatura del cavo motore collegata a questo
morsetto (lato azionamento) deve anche essere collegata alla carcassa del motore (lato motore). Utilizzare un morsetto schermato o con filtro
EMI per collegare la schermatura del cavo schermato al morsetto di terra.
4.2. Precauzioni per il cablaggio
Collegare l’Optidrive come illustrato nelle sezioni 4.3 e 4.4, assicurandosi che le connessioni della morsettiera del motore siano corrette. In
generale ci sono due collegamenti possibili: Stella e Triangolo. È essenziale assicurarsi che il motore sia collegato in modo conforme alla
tensione alla quale verrà messo in funzione. Per maggiori informazioni, fare riferimento alla sezione 4.5 Connessioni della morsettiera del
motore.
È consigliabile che il cablaggio di potenza sia effettuato con cavi a 4 poli isolati in PVC e schermati secondo le normative locali.
4.3. Collegamento alla rete elettrica
Con alimentazione monofase,la rete elettrica va collegata alle fasi L1/L, L2/N.
Con alimentazione trifase, la rete elettrica va collegata alle fasi L1, L2, e L3. La sequenza delle fasi non è rilevante.
Si raccomanda l’utilizzo di un cavo schermato simmetrico, in accordo con le norme CE e EMC C Tick.
Si raccomanda un’installazione fissa in accordo con lo standard IEC61800-5-1 con un adeguato dispositivo di sezionamento installato
tra l’Optidrive e la sorgente di alimentazione CA. Il dispositivo di sezionamento deve essere conforme alle norme di sicurezza vigenti
(per l'Europa, la norma EN60204-1 sulla Sicurezza dei Macchinari).
La dimensione dei cavi deve rispettare norme e direttive vigenti. Indicazioni sulle dimensioni si possono trovare nella sezione 0.
Installare nella linea di alimentazione fusibili adeguati a proteggere i cavi dell’alimentazione in ingresso, secondo i dati forniti nella
sezione 0. I fusibili devono essere conformi alle norme e alle direttive vigenti. In generale, sono ammessi fusibili di tipo gG (IEC
www.invertek.co.uk
11
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
60269) o UL tipo T; in qualche caso possono essere ammessi fusibili di tipo aR. Il tempo di intervento dei fusibili deve essere inferiore
a 0,5 secondi.
Ove permesso dalle normative vigenti, al posto dei fusibili è possibile utilizzare interruttori automatici di tipo B MCB di valore
equivalente, sempre che la capacità di interruzione sia sufficiente.
Quando l’alimentazione viene interrotta, attendere almeno 30 secondi prima di riattivarla. Attendere almeno 10 minuti prima di
rimuovere il rivestimento della morsettiera e le connessioni.
La corrente massima di corto circuito permessa sui terminali di potenza dell’Optidrive è di 100 kA, come definito dalla norma
IEC60439-1.
Si raccomanda l’installazione nei cavi di alimentazione degli azionamenti di un’induttanza di ingresso opzionale, qualora si verificasse
una delle seguenti condizioni:o L’impedenza dell’alimentazione è bassa oppure la corrente di guasto / corto circuito è alta
o La linea di alimentazione è soggetta a buchi o cali di tensione
o La linea di alimentazione presenta squilibri (azionamento trifase)
o L’alimentazione dell’azionamento avviene attraverso una linea di contatto a strisciamento (tipica dei carroponte).
Per tutte le altre installazioni, si raccomanda l’uso di un’induttanza di ingresso per assicurare la protezione dell’azionamento contro i
guasti sulla linea di alimentazione. I dati relativi sono mostrati nella seguente tabella.
I modelli di Optidrive HVAC taglia da 4 a 7 sono regolarmente già forniti di un’induttanza di ingresso.
Alimentazione
Taglia
Induttanza d’ingresso CA
230 V
2
OD-IL221-IN-I55
Monofase
2
OD-IL-263-IN-I55
230 / 400 V
(1)
Trifase
3
OD-IL-363-IN-I55
(1) : Non adatto per l’utilizzo su unità 400 V, 7,5 kW, FS3
4.4. Collegamento dell'azionamento al motore
Il motore deve essere collegato ai morsetti U, V, e W dell' Optidrive attraverso cavi a 3 o 4 poli. Quando si utilizza un cavo a 3 poli,
con la schermatura che funziona da conduttore di terra, la schermatura deve avere una sezione almeno equivalente a quella dei
conduttori di fase quando questi sono dello stesso materiale. Quando si utilizza un cavo a 4 poli, il conduttore di terra deve avere una
sezione quantomeno equivalente, composta dello stesso materiale dei conduttori di fase.
La terra del motore deve essere collegata a uno dei terminali di terra dell'Optidrive.
Utilizzare un apposito cavo schermato, in accordo con la direttiva europea EMC. Si raccomandano cavi schermati intrecciati o a
spirale la cui copertura rappresenti almeno l'85% della superficie del cavo, progettati con bassa impedenza ai segnali ad alta
frequenza. È generalmente ammessa anche l'installazione con apposito cavo in acciaio o rame.
La schermatura del cavo deve essere fissata sul lato del motore attraverso un pressacavo EMC che permetta la connessione al corpo
motore utilizzando la maggior superficie possibile.
Quando gli azionamenti sono montati in un quadro elettrico metallico, il cavo schermato deve essere terminato direttamente sul
pannello di controllo attraverso un apposito morsetto o pressacavo EMC, il più possibile vicino all'azionamento.
Per azionamenti IP55, collegare il cavo motore schermato alla morsettiera interna di terra.
4.5. Collegamenti della morsettiera del motore
La maggior parte dei motori offerti vengono avvolti per funzionare con tensioni doppie. Ciò viene indicato sulla targa del motore.
La tensione di funzionamento viene selezionata normalmente quando si installa il motore scegliendo il collegamento stella o triangolo. Il
collegamento a stella dà sempre la tensione più elevata fra le due.
Tensione di
alimentazione (V)
Tensione indicata sulla
targa del motore
230
230 / 400
Collegamento
Triangolo
12
400
400 / 690
400
230 / 400
www.invertek.co.uk
Stella
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
4.6. Cablaggio dei segnali di controllo
Tutti i cavi di segnale analogici devono essere schermati. Si raccomanda l'uso di cavi intrecciati.
Instradare separatamente, ove possibile, i cavi di alimentazione e controllo, e non disporli in parallelo.
Segnali a tensione diversa (ad esempio 24 V CC e 110 V CA), non devono essere instradati nello stesso cavo.
La coppia di serraggio massima è di 0.5 Nm.
4.7. Schema di collegamento della morsettiera di controllo
Identificazione dei morsetti e funzioni predefinite
Alimentazione del circuito di
controllo +24 V oppure
Alimentazione esterna 24 V
Arresto / Marcia (abilitazione)
Riferimento analogico / Velocità
preimpostata 1
+24V
DI1
DI2
RL1-C
RL1-NO
Uscita relè programmabile
RL2-C
+10V
RL2-NO
AI2
0V
Azionamento in funzione
Uscite analogiche programmabili
AI1
Ingressi analogici programmabili
Azionamento senza errori
RL1-NC
DI3
Controllo remoto / Controllo locale
Uscita relè programmabile
AO1
Velocità in uscita
0V
Corrente in uscita
AO2
Circuito di arresto in sicurezza per
funzione Safe Torque Off
STOSTO+
4.8. Collegamenti della morsettiera
1
+24 V
2
3
4
5
6
7
8
9
10
11
12
DI 1
DI 2
DI 3
+10 V
AI 1
0V
AO1
0V
AI 2
AO2
STO+
13
STO-
14
15
16
17
18
RL1-C
RL1-NO
RL1-NC
RL2-A
RL2-B
Morsettiera principale
Ingresso / Uscita Utente
Uscita 100 mA o +24 V alimentazione di back up
+24 V
Ingresso 1
Digitale 8 – 30 V CC
Ingresso 2
Digitale 8 – 30 V CC
Ingresso 3
Digitale 8 – 30 V CC
Uscita Utente + 10 Volt
10 mA per connessione potenziometro utente
Ingresso 4
Digitale da 8 a 30 V CC / Ingresso analogico 1, da -10 a +10 V, da 0 / 4 a 20 mA
Comune 0 Volt
Uscita 1
1° Uscita analogica / digitale, da 0 a 10 V, da 4 a 20 mA o +24 V CC Digitale
Comune 0
Ingresso 5
Digitale da 8 a 30 V CC / Ingresso analogico 2, da 0 a 10 V, da 0 / 4 a 20 mA o PTC motore
Uscita 2
2° Uscita analogica / digitale, da 0 a 10 V, da 4 a 20 mA o +24 V CC Digitale
Disabilitazione hardware
Ingresso “Safe” 24 V - deve essere collegato a una tensione +24 V (18 – 30 V) CC esterna per
abilitare lo stadio di potenza
Ingresso disabiltazione 0V
Comune 0 V per tensione 24 V “Safe” (STO)
Morsettiera supplementare
Uscita relè 1 Comune
Contatti relè, 250 V CA, 30 V CC, 5 A
Uscita relè 1 NO
Contatti relè, 250 V CA, 30 V CC, 5 A
Uscita relè 1 NC
Contatti relè, 250 V CA, 30 V CC, 5 A
Uscita relè 2 Comune
Contatti relè, 250 V CA, 30 V CC, 5 A
Uscita relè 2 NO
Contatti relè, 250 V CA, 30 V CC, 5 A
www.invertek.co.uk
13
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
5. Funzionamento del tastierino
L'azionamento è configurato per operare tramite tastierino e display OLED.
5.1. Funzione e utilizzo dei tasti
Display OLED
Visualizzazione parametro principale
Mostra quale dei parametri selezionabili
è al momento attivo sul display
principale, ad esempio Velocità del
Motore, Corrente del Motore, ecc.
Tastierino di controllo
Fornisce l'accesso ai parametri, e
permette il controllo dell'azionamento
quando viene selezionata la modalità
Manuale.
Informazioni sull'operatività
Fornisce informazioni in tempo reale
sull'operatività, ad esempio Corrente in
uscita e Potenza
Tasto Navigate
Mostra informazioni in tempo reale,
permette di entrare e uscire dalla
modalità modifica dei parametri,
memorizza modifiche nei parametri
Tasto Start
In modalità Manuale serve ad avviare
l'azionamento.
Tasto Up
Utilizzato per incrementare la velocità
nella modalità tempo-reale o per
aumentare i valori dei parametri in
modalità modifica
Tasto Stop / Reset
Serve a resettare un azionamento in
errore. In modalità Manuale, arresta
l'azionamento
Tasto Down
Utilizzato per ridurre la velocità nella
modalità tempo-reale o per ridurre i
valori dei parametri in modalità modifica
Tasto Modalità manuale
Serve a far funzionare l’azionamento in
modalità manuale (tramite tastierino)
Tasto Modalità automatica
Serve a far funzionare l’azionamento in
modalità automatica (da remoto)
5.2. Aspetto del display con l’azionamento in funzione
Viene visualizzata quando la
funzione Safe Torque Off è attiva
Visualizzata quando si applica
alimentazione all'azionamento, il
motore è fermo
L'azionamento è in funzione, il
display mostra informazioni
sull'uscita
Schermata di blocco, viene
visualizzata la causa del blocco
dell'azionamento
5.3. Accesso e modifica dei valori dei parametri
Mantenere premuto il tasto
Navigate per più di 1 secondo
14
Usare i tasti Up e Down per
scorrere i parametri
Premere Navigate per
selezionare il parametro
desiderato
www.invertek.co.uk
Utilizzare i tasti Up e Down per
modificare il valore del
parametro
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
5.4. Ripristino delle impostazioni di fabbrica
Il display mostra P-Def.
L’azionamento è tornato ai
parametri predefiniti. Premere il
tasto Stop
Nota: I parametri non possono venire riportati ai valori predefiniti quando P2-39=1 (set di parametri bloccato).
Mantenere premuti i tasti Up,
Down, Start e Stop per più di 2
secondi
5.5. Ripristino dei parametri predefiniti
Le impostazioni correnti dei parametri possono essere memorizzate come impostazioni predefinite dell’azionamento. Tale opzione non
invalida la procedura per il ripristino delle impostazioni di fabbrica descritta sopra.
Si può abilitare P6-29 Memorizza i parametri predefiniti come default (immettendo il valore 1) per memorizzare le impostazioni dei parametri
correnti come valore di default dell’azionamento. Si può accedere al menù del gruppo 6 con un accesso del livello di sicurezza avanzato
(impostazione di default P1-14=201).
Il display mostra P-Def.
L’azionamento è tornato ai
parametri predefiniti. Premere il
tasto Stop
Nota: I parametri non possono venire riportati ai valori predefiniti quando P2-39=1 (set di parametri bloccato).
Mantenere premuti i tasti Up,
Down e Stop per più di 2 secondi
www.invertek.co.uk
15
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
5.6. Selezione della lingua sul display OLED
Tenere premuti i tasti Start,
Navigate e Up per più di 1 secondo
Usare i tasti Up e Down per
selezionare la lingua. Premere il
tasto Navigate per effettuare la
selezione
5.7. Selezione della Modalità manuale / automatica
A = Automatica
H = Manuale
La modalità di controllo in uso viene
mostrata sul display OLED.
Utilizzare i tasti Modalità manuale e
Modalità Automatica sul tastierino per
passare da una modalità di controllo
all’altra
16
La modalità manuale permette di
controllare l’azionamento direttamente
dal tastierino. La modalità automatica è
configurata con il parametro P1-12
(Modalità di controllo)
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
6. Messa in servizio
6.1. Generale
Le seguenti linee guida si intendono valide per tutte le applicazioni.
6.1.1. Inserimento dei dati di targa del motore
I dati di targa del motore dell‘Optidrive HVAC servono per:
Far funzionare il motore alla massima efficienza possibile
Proteggere il motore da possibili danneggiamenti dovuti al funzionamento in condizioni di sovraccarico.
Per conseguire tali risultati, inserire i dati di targa del motore nei parametri :P1-07 Tensione nominale motore. Indica la tensione del motore a seconda del collegamento utilizzato (triangolo o stella). La tensione
massima in uscita dell’Optidrive non potrà mai superare la tensione in ingresso.
P1-08 Corrente nominale motore. Indica la corrente a pieno carico del motore
P1-09 Frequenza nominale motore. Individua la frequenza di funzionamento nominale del motore, generalmente 50 o 60 Hz
P1-10 Velocità nominale motore. Questo parametro può essere opzionalmente impostato al valore di RPM indicato nei dati di targa del
motore. Quando si inserisce questo parametro, tutti i parametri relativi alla velocità vengono visualizzati in RPM. Quando il valore del
parametro è impostato a 0, tutti i parametri relativi alla velocità vengono visualizzati in Hz.
6.1.2. Velocità e Frequenze minime / massime
Le impostazioni di fabbrica delle unità Optidrive HVAC consentono al motore di funzionare con velocità da 0 alla velocità nominale (50 o 60 Hz
in uscita). In generale, questo intervallo di funzionamento è adatto per soddisfare un’ampia gamma di necessità; in ogni caso, in alcune
circostanze potrebbe essere necessario modificare tali limiti, ad es. quando alla velocità massima una ventola o una pompa farebbero circolare
un flusso eccessivo, oppure quando il funzionamento non deve avvenire al di sotto di una certa velocità. In questo caso i seguenti parametri
possono essere modificati per adattarsi all‘applicazione.
P1-01 Frequenza massima. Generalmente, questo parametro è allineato alla frequenza nominale motore. Se si desidera far funzionare il
motore oltre la frequenza massima consentita, verificarne la fattibilità con il produttore del motore e delle ventole o pompe collegate, così da
non danneggiare l’apparecchio.
P1-02 Frequenza minima. È possibile impostare una frequenza minima così da evitare il funzionamento a velocità ridotta, che potrebbe
causare il surriscaldamento del motore. In alcune applicazioni, come nel caso di una pompa per la circolazione dell‘acqua in una caldaia,
potrebbe essere necessario impostare la velocità minima così da impedire alla caldaia di rimanere senz’acqua durante il funzionamento.
www.invertek.co.uk
17
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
7. Impostazione funzionalità specifiche HVAC (menù 8)
L’Optidrive HVAC presenta diverse funzionalità integrate nel software che sono state progettate specificatamente per soddisfare le esigenze
delle applicazioni nel campo del riscaldamento, ventilazione e condizionamento (HVAC). La maggior parte dei parametri utilizzati per abilitare
ed impostare queste funzioni sono contenuti nel menù 8. Nella sezione 13 si può trovare una spiegazione delle finalità e del modo operativo di
ognuna di queste funzioni.
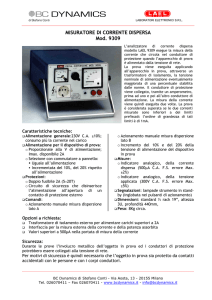
7.1. Funzione multipompe – controllo di pompe ausiliarie a velocità fissa
Riepilogo: Lo schema sottostante illustra l’utilizzo di un’unità Optidrive HVAC come controllore in un impianto composto da una pompa
principale a velocità regolabile affiancata da pompe ausiliarie a velocità fissa alimentate direttamente dalla rete. La pompa principale viene
comandata dall’uscita dell’Optidrive HVAC in modalità velocità variabile, mentre fino a 4 pompe slave a velocità fissa alimentate dalla rete
vengono controllate tramite le uscite a relè dell’Optidrive HVAC che comandano i rispettivi contattori, come illustrato nello schema.
L’uscita relè 1 della morsettiera principale (T14 e T15) non può essere utilizzato come parte del controllo multipompe, ma è liberamente
programmabile per altre funzioni tramite l’impostazione del parametro P2-15. L’uscita relè 2 della morsettiera (T17 e T18) può essere utilizzata
come comando a velocità fissa per la prima pompa asservita (slave 1); il relè 2 viene dedicato al controllo multipompe impostando il
parametro P2-18 = 8, o può essere utilizzato per una funzione alternativa immettendo un valore diverso da 8. Nel caso di impianti con più di
una pompa asservita, sarà necessario un installare un modulo opzionale di espansione I/O. Tali moduli consentono di collegare fino ad altre 3
pompe ausiliarie a velocità fissa (per un totale di 4 pompe slave a velocità fissa). Potrebbe essere necessario installare dei relè supplementari
qualora la tensione o la corrente di comando richieste dal contattore superino i valori massimi ammessi dalle specifiche dei relè
dell’azionamento (consultare la sezione 4.8, Collegamenti della morsettiera). Il sensore della variabile d’uscita del sistema di pompaggio è
collegato all’ingresso analogico 1 o 2 (T6 o T10) dell’Optidrive HVAC e viene selezionato come retroazione del controllo PID dell’azionamento.
Consultare il menù dei parametri del gruppo 3 per la configurazione dei parametri PID e retroazione.
Funzionamento generale: Il controllo di più pompe ausiliarie a velocità fissa in cascata (cascade) viene abilitato impostando P8-14=1
(Selezione funzione multipompe). Inoltre, il valore di P8-15, ‘Numero di pompe asservite’ deve essere impostato con il numero di pompe
ausiliarie in modalità slave alimentate direttamente dalla rete disponibili (con valore diverso da 0). L’Optidrive HVAC comanda la pompa
principale tramite il controllo a velocità variabile. Il numero di pompe ausiliarie a velocità fissa disponibili nel sistema è determinato dal
parametro P8-15. Ad un livello di flusso predefinito, le pompe ausiliarie a velocità fissa vengono avviate nel sistema in sequenza per aiutare la
pompa principale controllata a velocità variabile. La sequenza di accensione delle pompe ausiliarie viene definita dai singoli orologi che
registrano il rispettivo tempo di funzionamento effettivo (controllati e gestiti dall’Optidrive HVAC); la pompa ausiliaria che ha lavorato per
meno tempo sarà quella accesa per prima. Verrà osservato un intervallo minimo predefinito di lavoro per la pompa ausiliaria (impostato in P819) prima che ogni altra pompa ausiliaria presente nell’impianto venga accesa o spenta. In questo modo, l’impianto di pompaggio può
raggiungere uno stato di funzionamento stabile prima di accertare ulteriori esigenze di avvio o arresto delle pompe ausiliarie. Lo spegnimento
della pompe ausiliarie avviene in sequenza ad un livello predefinito in ordine di periodo di funzionamento. La differenza massima nel tempo di
funzionamento tra le pompe ausiliarie a velocità fissa può essere regolata impostando il parametro P8-16, Tempo di lavoro di ogni pompa.
Quando viene immesso un valore in P8-16 e tale valore viene superato, l’Optidrive HVAC spegnerà automaticamente la pompa ausiliaria a
velocità fissa in funzione da più tempo e accenderà quella con il tempo di funzionamento minore. Quando il valore di P8-16 è impostato a 0,
viene disabilitato l’intervallo di commutazione delle pompe, e la commutazione di queste viene determinata soltanto attraverso i limiti di
flusso (su richiesta). I contatori relativi al tempo di funzionamento si possono visualizzare in P0-19, e vengono ripristinati impostando a 1 il
parametro P8-20, Reset contatore pompe.
18
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Impostazione rapida:
Impostare i parametri di base da P1-01 a P1-10. Il Risparmio energia P1-06 deve rimanere disabilitato.
Impostare il parametro P1-14= 101 per accedere ai parametri estesi
Configurare i parametri del gruppo 3 per il controllo PID
Se il relè 2 dell’azionamento viene utilizzato per il controllore delle pompe a velocità fissa, impostare P2-18 = 8
Impostare P8-14=1 per abilitare la modalità multipompe
Impostare il numero di pompe ausiliarie a velocità fissa disponibili (esclusa la pompa principale controllata in velocità) in P8-15
Impostare i limiti di velocità dell’Optidrive HVAC per avviare / arrestare le pompe ausiliarie a velocità fissa come segue:
o P8-17: Velocità della pompa principale per l’avvio delle pompe a velocità fissa – Limite superiore per l’avvio di una pompa
ausiliaria a velocità fissa
o P8-18: Velocità della pompa principale per l’arresto delle pompe a velocità fissa – Limite inferiore per lo spegnimento di
una pompa ausiliaria a velocità fissa
Impostare in P8-19 un intervallo tempi di lavoro minimo per garantire l’assestamento delle pompe (almeno 10 secondi). Il valore
immesso in P8-19 deve essere sufficiente al segnale di retroazione PID del sensore di uscita del sistema per raggiungere una
condizione stabile di assestamento.
Se gli intervalli di funzionamento tra le pompe ausiliarie devono essere bilanciati, allora la differenza massima consentita va immessa
in ore in P8-16.
7.2. Funzione multipompe – controllo multiplo di pompe ausiliarie a velocità variabile
Riepilogo:
Lo schema sottostante illustra l’utilizzo di più unità Optidrive HVAC come controllori in un impianto di pompaggio costituito da più pompe a
velocità variabile. Tutte le pompe vengono controllate dalle singole unità Optidrive HVAC in modalità velocità variabile; il coordinamento e la
comunicazione tra gli azionamenti avvengono tramite i collegamenti RS485 integrati, come illustrato nello schema.
Gli azionamenti possono essere collegati utilizzando cavi di rete RJ45 e lo splitter RS485 come illustrato sopra, fino ad un massimo di 5
azionamenti, rispettando i seguenti dati tecnici:
Codice
prodotto
OPT-RJ45SP
OPT-J4505
OPT-J4510
OPT-J4530
Descrizione
Splitter RJ45 mono/bidirezionale
Cavo di rete da RJ45 a RJ45 RS485, 0,5 m
Cavo di rete da RJ45 a RJ45 RS485, 1 m
Cavo di rete da RJ45 a RJ45 RS485, 3 m
Ogni motore/pompa presente nel sistema viene controllata da un azionamento HVAC dedicato (uno per pompa). Tutti gli azionamenti
funzionano a velocità variabile e i riferimenti della velocità vengono trasmessi attraverso la rete di comunicazione.
Un azionamento verrà definito come “Master di rete”. Al master di rete fanno capo il sensore di retroazione e il valore di riferimento in
ingresso, tramite i quali e la funzione di controllo PID calcola la velocità di funzionamento del sistema. Il master di rete comunica lo stato di
abilitazione e la velocità di riferimento a tutti gli altri azionamenti collegati in rete.
www.invertek.co.uk
19
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Funzionamento generale:
La funzione di controllo multipompe con azionamenti multipli in cascata (cascade) viene abilitata impostando P8-14=2 (Selezione funzione
multipompe) solo sul master di rete. Tutti gli altri azionamenti devono essere impostati come slave impostando il parametro P1-12= 5
“Modalità slave”. Inoltre, il valore di P8-15 sul master di rete, ‘Numero di pompe asservite’ deve essere impostato con il numero di
azionamenti disponibili nel sistema (azionamenti slave) ad esclusione del master (con valore diverso da 0). Il master di rete va impostato con
indirizzo 1 (default), e gli indirizzi degli azionamenti slave in sequenza agli indirizzi successivi (2. 3. 4. 5...). Gli indirizzi vengono determinati in
P5-01. Quando il sistema è abilitato, il master controllerà i contatori relativi al funzionamento di tutti gli azionamenti in rete, e ne registrerà i
dati nel menu del gruppo 0. Il primo azionamento disponibile con tempo di funzionamento minore verrà automaticamente avviato per primo.
Ad un livello predefinito verranno accesi in sequenza anche gli altri azionamenti per aiutare le pompe in funzione. La sequenza di accensione è
determinata dai contatori relativi al tempo di funzionamento degli azionamenti (controllati e gestiti dal master di rete); la pompa con tempo
di funzionamento minore sarà quella accesa per prima. Verrà osservato un intervallo predefinito di lavoro minimo per l’assestamento
(impostato in P8-19) prima che ogni altra pompa del sistema venga accesa o spenta. Ciò permette all’impianto di pompaggio di raggiungere
una condizione di funzionamento stabile prima di accertare ulteriori esigenze di avvio o arresto delle pompe ausiliarie. Lo spegnimento della
pompa avviene in sequenza ad un livello predefinito in ordine di periodo di funzionamento. Le velocità massima e minima ed i tempi di rampa
di ogni azionamento vengono determinati dalle impostazioni individuali di ogni azionamento (da P1-01 a P1-04). La differenza massima nel
tempo di funzionamento tra le pompe ausiliarie può essere regolata attraverso il parametro P8-16, Tempo di lavoro pompa. Quando viene
immesso un valore in P8-16 e questo viene superato, il master di rete spegnerà automaticamente l’azionamento / pompa in funzione da più
tempo e avvierà quella con il tempo di funzionamento minore. Quando il valore di P8-16 è impostato a 0 viene disabilitato l’intervallo di lavoro
minimo delle pompe, la commutazione di queste viene determinata soltanto attraverso i limiti di flusso (su richiesta). I contatori relativi al
tempo di funzionamento si possono visualizzare in P0-19 sul master di rete, e vengono ripristinati impostando a 1 il parametro P8-20, Reset
contatore generale pompe, sul master di rete. Il master di rete presumerà che ogni azionamento che non risponde alla comunicazione di rete
non sia disponibile (perché spento o perché il bus RS485 è disconnesso). Il master di rete continuerà a interrogare gli azionamenti offline ma
non tenterà di avviare un azionamento fino al ripristino della comunicazione. Qualora qualunque azionamento, compreso il master di rete,
entri in una condizione di blocco / guasto, questo verrà temporaneamente sospeso dall’operatività e il sistema continuerà a funzionare con gli
altri azionamenti disponibili. Quando un azionamento viene ripristinato a seguito di un blocco / guasto, diventa subito disponibile per il master
di rete. L’ingresso di abilitazione (T1 – T2) al master di rete è considerato quello dell’intero sistema, e può avviare o arrestare il funzionamento
dell’impianto di pompaggio. Gli ingressi individuali di abilitazione (T1 – T2) sul master di rete forniscono un ingresso di inibizione che impedirà
il funzionamento di quel particolare azionamento.
Impostazione rapida:
Per tutti gli azionamenti HVAC
Impostare i parametri di base da P1-01 a P1-10. P1-06, Risparmio energia, deve rimanere disabilitato.
Impostare P1-14= 101 per accedere ai parametri estesi
Per il Master di rete
Configurare i parametri del gruppo 3 per il controllo PID
Assicurarsi che l’indirizzo seriale in P5-01 sia stato lasciato come default (1)
Impostare il parametro P8-14=2 per abilitare la funzione multimpompe – azionamenti multipli in rete
Impostare il numero di pompe ausiliarie disponibili in rete (ad esclusione del master di rete VFD) in P8-15
Impostare i limiti di velocità per il funzionamento dell’Optidrive HVAC per avviare / arrestare le pompe ausiliarie come segue:
o P8-17: Velocità della pompa principale per l’avvio delle pompe ausiliarie – Limite superiore per l’avvio di una pompa
ausiliaria
o P8-18: Velocità della pompa principale per l’arresto delle pompe ausiliarie – Limite inferiore per lo spegnimento di una
pompa ausiliaria
Impostare in P8-19 un tempo di lavoro minimo per l’assestamento delle pompe (almeno 10 secondi). Il valore immesso in P8-19 deve
essere sufficiente al segnale di retroazione PID del sensore di uscita del sistema per raggiungere una condizione stabile di
assestamento.
Se gli intervalli di funzionamento tra le pompe ausiliarie devono essere bilanciati, allora la differenza massima consentita va immessa
in ore in P8-16.
Per gli slave di rete
Definire gli azionamenti come slave impostando P1-12 = 5
Impostare l’indirizzo seriale di rete in sequenza in P5-01 con indirizzi univoci, a partire dall’indirizzo 2 (2, 3, 4, 5...)
7.3. Impostazione e ripristino del tempo mancante alla manutenzione
L‘Optidrive HVAC è dotato un contatore che indica il tempo mancante alla manutenzione, visualizzabile su display e configurabile per
permettere l’impostazione di un ciclo di manutenzione o di intervalli dal funzionamento del dispositivo / sistema e per segnalare la necessità di
eseguire la manutenzione. Tale intervallo viene calcolato facendo riferimento al ‘Contatore ore di funzionamento dell’azionamento’ ed indica
per quanto tempo l’azionamento ha effettivamente lavorato.
Funzionamento generale:
La gestione degli intervalli di manutenzione viene abilitata e regolata attraverso il parametro P6-24, Tempo intervallo manutenzioni. Quando
P6-24 è impostato al valore di 0 il contatore è disabilitato. L’intervallo di tempo mancante alla manutenzione (P6-24) viene impostato in ore,
con un valore da 1 a 60.000 (l’impostazione di default è di 5.000 ore). È possibile accedere al menù del gruppo 6 soltanto a seguito
dell’immissione di una password di sicurezza avanzata in P1-14 (la password di default è 201). Il contatore viene attivato quando si immette un
valore valido in P6-24. Il tempo mancante alla manutenzione viene registrato e si può visualizzare in P0-22 (Tempo prossima manutenzione).
20
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Quando P0-22 arriva a 0 e si è esaurito il valore dell’intervallo impostato, l’Optidrive HVAC indicherà la necessità di effettuare la manutenzione
nelle modalità seguenti:
L’icona della manutenzione si visualizza automaticamente sul display OLED (in
alto a destra, in alternanza con l’indirizzo di comunicazione
dell’azionamento.
È possibile configurare uno dei relè di uscita dell’azionamento per indicare la
necessità di effettuare la manutenzione.
Un bit di avviso viene impostato nelle parole di comunicazione dell’azionamento (consultare il prontuario relativo alla comunicazione).
I seguenti parametri vengono usati per configurare i relè di uscita dell’azionamento così da attivare l’avviso relativo alla manutenzione.
Parametro
P2-15
P2-18
Descrizione
Funzione relè di uscita 1
Funzione relè di uscita 2
Morsetto
14 / 15
16 / 17 / 18
Valore
impostato
10
10
Quando l’intervallo impostato si è esaurito e la manutenzione è stata eseguita, il contatore viene ripristinato impostando a 1 il valore di P6-25,
Reset tempo intervallo manutenzioni. Il contatore riferito al successivo intervento di manutenzione si avvierà al momento del ripristino. È
necessario effettuare l’accesso avanzato (il default è P1-14 = 201) per accedere al parametro di Reset tempo intervallo manutenzioni.
Installazione rapida:
Impostazione del Tempo mancante alla manutenzione
Impostare P1-14 = 201 per accedere ai parametri avanzati del gruppo 6
Impostare l’intervallo di ore che si desiderano frapporre tra le manutenzioni tramite il parametro P6-24, Tempo intervallo
manutenzioni (per default le ore saranno 5.000).
Se è necessario utilizzare un’uscita dell’azionamento per indicare la necessità di effettuare la manutenzione, configurare l’uscita
secondo quanto indicato in tabella (P2-15 o P2-18 = 10).
Ripristino del Tempo mancante alla manutenzione
Impostare P1-14 = 201 per accedere ai parametri avanzati del gruppo 6
Impostare P6-25 = 1, Reset tempo intervallo manutenzioni per ripristinare il contatore relativo alla manutenzione.
7.4. Controllo del profilo di carico
La funzione di controllo del profilo di carico di protegge il sistema da condizioni di coppia eccessivamente elevata o eccessivamente ridotta
applicata al carico. Le applicazioni pratiche di questa funzione comprendono il rilevamento di rotture della cinghia di trasmissione o condizioni
di stallo del motore, oppure per evitare condizioni di blocco o di funzionamento a secco della pompa.
La funzione del controllo del profilo di carico di prende in considerazione un profilo di coppia di riferimento archiviato in memoria. Durante il
funzionamento, la corrente erogata dall’azionamento viene costantemente confrontata con quella teorica del profili di riferimento. Qualora
durante il funzionamento la corrente si distaccasse dai parametri impostati nel profilo di riferimento per un certo intervallo di tempo, si
genererà un blocco. Per modellare le condizioni di funzionamento normale, l’Optidrive HVAC utilizza 5 punti significativi nella curva che lega la
corrente erogata alla frequenza.
Qui sotto è riportata la rappresentazione grafica della funzione di controllo del profilo di carico.
www.invertek.co.uk
21
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Funzionamento generale: Per utilizzare il controllo del profilo di carico, deve essere abilitato il profilo standard di riferimento che lega la
corrente erogata con la velocità di funzionamento del motore pilotato dall’azionamento. L’impostazione della funzione di controllo del profilo
di carico di corrente e del profilo di riferimento rappresenta generalmente l’ultima fase delle attività messa in servizio del sistema.
Il profilo operativo standard viene definito usando una sequenza di misurazione automatica, che viene attivata quando la funzione di controllo
del profilo di carico è abilitata (P8-06 diverso da 0). Quando l’azionamento viene avviato per la prima volta a seguito dell’abilitazione del
controllo del profilo di carico, l’uscita verrà portata alla frequenza massima impostata in P1-01, e verranno registrate 5 misurazioni di corrente
equispaziate. L’azionamento tornerà poi alla velocità di riferimento normale. Per ripetere la sequenza di misurazione automatica, disabilitare il
controllo del profilo di carico (P8-06 = 0) e poi riabilitarlo (P8-06 <> 0).
Attenzione: La sequenza di misurazione automatica supera la velocità di riferimento normale e l’azionamento porterà il motore alla
massima frequenza (P1-01). Assicurarsi che il sistema si trovi nelle condizioni di poter funzionare nella gamma di velocità
programmata.
I parametri relativi alla frequenza / velocità massima (P1-01) e frequenza / velocità minima (P1-02) possono essere regolati a seguito
dell’esecuzione di una sequenza di misurazione automatica senza compromettere i risultati della misurazione stessa. Quando il funzionamento
avviene fuori dai limiti dell’intervallo relativo alla velocità la funzione è disabilitata.
Quando si regola il parametro P8-06 per attivare il controllo del profilo di carico, viene impostato un valore che indica all’Optidrive HVAC di
bloccarsi qualora venissero rilevate condizioni di sottocorrente (P8-06=1), sovracorrente (P8-06=2), o entrambe (P8-06=3).
Nel parametro P8-07 è possibile impostare una tolleranza per il controllo del profilo di carico. Il parametro P8-07 (Larghezza profilo carico)
viene visualizzato come valore di corrente (A) ed è applicato al profilo operativo standard per consentire variazioni accettabili nelle misurazioni
della corrente del motore. Il valore immesso si applica simmetricamente al valore della corrente nominale, cosicché la larghezza di banda
totale sarà 2 x P8-07. I valori relativi alla corrente misurati durante la procedura automatica autotune sono registrati nel parametro P0-58.
Oltre alla tolleranza applicata alla larghezza di banda del profilo operativo standard (P8-07), è possibile indicare un ritardo del blocco o limite di
tempo nel caso di funzionamento con coppia eccessiva o insufficiente. Questo intervallo di tempo è impostabile in P8-08 (Ritardo allarme
carico) per evitare blocchi indesiderati dovuti a disturbi mentre il carico si trova in uno stato temporaneo o di transizione.
L’Optidrive HVAC andrà in blocco non appena individuerà una condizione di coppia eccessiva o insufficiente per un intervallo di tempo
superiore a quello impostato in P8-08, e disabiliterà l’uscita del motore facendolo decelerare fino ad arrestarsi. La condizione di blocco verrà
visualizzata sul display OLED e potrà essere ripristinata premendo il tasto STOP sul tastierino.
È possibile impostare l’Optidrive HVAC per avviare un ciclo di pulizia automatica della pompa quando il controllo del profilo di carico individua
una condizione di eccessivo coppia eccessiva. Consultare la sezione 7.5, Pulizia della pompa, per maggiori informazioni.
Codici di blocco:
: Rilevazione di coppia eccessiva e successivo blocco (codice di guasto 24)
: Rilevazione di coppia insufficiente e successivo blocco (codice di guasto 25)
Impostazione rapida:
Leggere attentamente la sopracitata Nota riferita a questa funzione
Impostare i limiti Massimo e minimo di velocità dell’azionamento (P1-01 e P1-02).
Impostare i parametri di base da P1-03 a P1-10. P1-06, Risparmio energia, deve rimanere disabilitato.
Impostare P1-14 = 101 per accedere ai parametri avanzati del gruppo 8
Abilitare la funzione Controllo del profilo di carico di tramite la regolazione del parametro P8-06
o 0: Disabilitato
o 1: Abilitazione rilevazione carico insufficiente (guasto alla cinghia / pompa a secco / guasto alla ventola)
o 2: Abilitazione rilevazione carico elevato (blocco della pompa)
o 3: Rilevazione di carichi insufficienti ed elevati
Impostare una tolleranza conveniente per la larghezza di banda in P8-07. Impostare inizialmente un’ampia larghezza della banda e
controllare la corrente durante il funzionamento dell’azionamento per definire eventuali restrizioni nella banda.
Abilitare l’azionamento e consentire la sequenza di misurazione automatica.
Nel caso dovessero avere luogo dei blocchi dovuti a disturbi, aumentare il Ritardo allarme carico in P8-08. Qualora il blocco
persistesse, ripetere la sequenza di misurazione automatica.
7.5. Pulizia della pompa
La funzione di pulizia della pompa serve a rimuovere eventuali blocchi o ostruzioni dalla pompa. Tale funzione può essere avviata
manualmente tramite ingresso digitale oppure venire attivata automaticamente all’accensione, oppure ogni volta che l’azionamento rileva una
condizione di coppia eccessiva sul carico che può indicare il formarsi di un’ostruzione.
Quando il ciclo di pulizia viene attivato, l‘Optidrive HVAC esegue un profilo di velocità predefinito (ciclo di pulizia) per provare a rimuovere il
blocco nella pompa.
Funzionamento generale: La funzione di pulizia della pompa può essere abilitata o disabilitata, e il suo avvio automatico è definito
dall’impostazione del parametro P8-03, Selezione funzione pulizia:
0. Disabilitato
1. Pulizia della pompa all’avvio
2. Pulizia della pompa all’avvio o in caso venga rilevato una coppia eccessiva
3. Pulizia della pompa in caso venga rilevato una coppia eccessiva
22
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Se vengono selezionate le opzioni 1 o 2 verrà eseguito immediatamente un ciclo di pulizia all’avvio dell’azionamento (il comando di abilitazione
viene dato da ingresso digitale 1, morsetto 2). Non appena il ciclo di pulizia sarà terminato, l’azionamento ritornerà in una condizione
operativa normale.
Se vengono selezionate le opzioni 2 o 3, allora andrà impostata la funzione di Controllo del profilo di carico per rilevare un’eventuale
condizione di coppia eccessiva. Seguire le istruzioni riportate in questo manuale d’uso alla sezione 7.4 – Controllo del profilo di carico per
impostare la funzione di Controllo del profilo di carico. Qualora venisse avviata la pulizia della pompa in presenza di coppia eccessiva,
l’azionamento non andrà in una condizione di blocco per coppia eccessiva, bensì intraprenderà automaticamente un ciclo di pulizia della
pompa. Una volta terminato il ciclo di pulizia, l’azionamento ritornerà in una condizione operativa normale. Nell’eventualità che venisse
riscontrato un’ulteriore condizione di coppia eccessiva nei 60 secondi immediatamente successivi alla conclusione di un ciclo di pulizia, allora
l’azionamento si bloccherà per coppia eccessiva.
Si potranno programmare ulteriori tentativi per effettuare la pulizia della pompa (fino ad un massimo di 5) attraverso la funzione di Ripristino
automatico di un blocco (vedere P2-36 – Modalità di start). Quando viene automaticamente riavviato in seguito a un blocco per coppia
eccessiva, l’azionamento intraprende automaticamente un ciclo di pulizia della pompa se tale funzione è stata abilitata.
Se a questa funzione viene assegnato un ingresso digitale, l’attivazione dell’ingresso avvierà il ciclo di pulizia della pompa indipendentemente
dalle impostazioni del parametro P8-03 (Selezione funzione pulizia). Quando la pulizia della pompa viene avviata da un ingresso
dell’azionamento, questo accelererà dall’attuale velocità di funzionamento alla prima velocità impostata dal ciclo di pulizia della pompa
utilizzando i valori di rampa di riferimento applicabili.
L’assegnazione dell’ingresso digitale dedicato alla funzione di pulizia della pompa è definita dal parametro P9-42 – Ingresso comando pulizia. Il
menù del gruppo 9 è accessibile soltanto dopo aver effettuato l’accesso di sicurezza avanzata (l’impostazione di default è P1-14=201).
Impostare P9-42 con il valore associato all’ingresso digitale da utilizzare.
Il ciclo di pulizia viene determinato dalla combinazione di due valori di velocità, dal tempo di rampa di accelerazione e decelerazione e dal
tempo impostato per il ciclo di pulizia:
Parametro
P2-05
P2-06
P8-04
P8-05
Descrizione
Velocità di pulizia 1
Velocità di pulizia 2
Durata della pulizia della pompa
Tempo di rampa accelerazione pulizia della pompa
Se entrambe le velocità di pulizia sono impostate a 0, allora quel segmento del ciclo di pulizia è disabilitato. Le velocità di pulizia possono
essere positive o negative per permettere la marcia in avanti o indietro e la creazione profili bidirezionali. Il valore della rampa di accelerazione
per la funzione pulizia della pompa viene determinata dall’impostazione del parametro P8-05. Il valore della rampa di decelerazione viene
determinato dalla rampa di decelerazione standard del parametro P1-04.
Attenzione: Assicurarsi che la pompa sia idonea ad effettuare l’inversione di marcia prima di applicare un valore negativo alla
velocità di pulizia 1 o alla velocità di pulizia 2 (P2-05 e P2-06).
Di seguito è riportato un esempio di profilo di velocità per la pulizia della pompa.
Quando è stato completato il ciclo di pulizia della pompa, l’azionamento ritorna immediatamente al valore di riferimento della velocità di
funzionamento. È possibile ritornare alla velocità operativa normale utilizzando le impostazioni standard relative alla rampa (P1-03 / P1-04). Il
tempo di esecuzione del segmento (impostato in P8-04) include il tempo impiegato per consentire l’accelerazione del motore fino alla velocità
necessaria alla pulizia, ma non comprende il ritorno alla velocità di funzionamento normale.
www.invertek.co.uk
23
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Impostazione rapida:
Se la pulizia della pompa viene avviata in conseguenza della rilevazione di coppia eccessiva, deve prima essere impostata la funzione
descritta nella sezione 7.4, Controllo del profilo di carico.
Impostare i parametri di base da P1-01 a P1-10. Mantenere disabilitato P1-06, Risparmio energia.
Impostare P1-14 = 101 per accedere ai parametri avanzati del gruppo 8.
Impostare la velocità per ogni segmento di pulizia nei parametri P2-05 e P2-06.
Abilitare la pulizia della pompa impostando il parametro P8-03. Non è necessario impostare P8-03 se la funzione di pulizia è attivata
solo da un ingresso digitale.
o 0: Disabilitata
o 1: Attivata all’abilitazione (avvio della pompa)
o 2: Attivata all’abilitazione (avvio della pompa), o in caso di funzionamento con coppia eccessiva
o 3: Attivata in caso di funzionamento con coppia eccessiva
Impostare il tempo del segmento del ciclo di pulizia nel parametro P8-04. Individua il tempo necessario ad avviare un segmento di
pulizia, inclusa l’accelerazione.
Impostare il tempo di rampa per la pulizia della pompa in P8-05. Rappresenta il valore di rampa per l’accelerazione alla Velocità di
pulizia 1 e alla Velocità di pulizia 2.
7.6. Funzione antideposito
La funzione anti deposito serve ad avviare la pompa a seguito di un periodo di inattività. Quando il motore non ha funzionato per un periodo di
tempo predefinito, viene eseguito un profilo di velocità definito dall’utente. La funzione è attiva quando l’azionamento si trova in modalità PID
e il contatore attivato dall’azionamento entra in standby. Serve a impedire che la pompa si ostruisca o si deteriori a seguito di prolungati
periodi di inattività. Questa funzione può essere utile anche nel caso di applicazioni di ventilazione per prevenire il deterioramento dei
lubrificanti dei cuscinetti.
Funzionamento generale:
Il tempo trascorso il quale viene avviata la funzione antideposito viene impostato nel parametro P8-01 (Intervallo antideposito). Quando
l’azionamento passa in modalità di standby (consultare il paragrafo relativo al controllo PID, sezione 8) viene avviato un contatore interno.
Quando questo contatore supera il limite di tempo impostato dall’utente in P8-01 viene attivato un profilo di velocità predefinito. Al
completamento della funzione, l’azionamento ritornerà in modalità di standby. Il contatore interno verrà ripristinato uscendo dalla modalità di
standby o al completamento della funzione antideposito.
Il profilo di velocità viene impostato attraverso due parametri. Il parametro P8-02 (Durata funzione anti-deposito) definisce l’intervallo di
tempo in cui la pompa deve funzionare e P2-07 (Velocità preimpostata 7 – Velocità di Boost / Funzione anti-deposito) determina la velocità a
cui verrà accelerata e funzionerà la pompa nel corso del ciclo anti-deposito. Il tempo di funzionamento della funzione antideposito comprende
il tempo necessario ad accelerare ma non il tempo che servirà per decelerare ed arrestarsi.
Di seguito è riportato un esempio di profilo di velocità della funzione antideposito:
Impostando a 0 il contatore intervallo funzione antideposito (P8-01) o il contatore durata funzione antideposito (P8-02) si disabilita la funzione
antideposito. Questa funzione è disabilitata come impostazione di default.
Impostazione rapida:
Impostare i parametri di base da P1-01 a P1-10
Impostare P1-14 = 101 per accedere ai parametri avanzati del gruppo 8
Impostare i parametri del controllo PID del gruppo 3 (consultare la sezione 11.2)
Impostare la velocità per la funzione antideposito al parametro P2-07
Impostare in P8-01 l’intervallo di tempo per lo standby prima che venga avviata la funzione antideposito
Impostare in P8-02 l’intervallo di tempo in cui sarà operativa la funzione antideposito
24
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
7.7. Modalità Bypass
La modalità Bypass consente al motore di funzionare essendo alimentato dall’azionamento Optidrive HVAC (a velocità variabile) o
direttamente dalla linea di alimentazione (a velocità fissa). Per la creazione del circuito di bypass, il circuito di controllo necessita di
componenti esterni e di connessioni che non fanno parte dell’Optidrive HVAC e che sono di responsabilità del progettista di sistema.
Attenzione: Gli esempi circuitali forniti in questo manuale servono solo da linee guida. La progettazione del sistema, installazione,
messa in servizio e manutenzione devono essere eseguiti esclusivamente da personale esperto. Il sistema deve essere installato
solo da personale qualificato e in ottemperanza alle normative locali vigenti.
La modalità bypass di controllo permette all’azionamento di attivare automaticamente il circuito di bypass in caso di blocco o guasto o in caso
di attivazione della Modalità incendio (consultare la sezione 7.8 – Modalità incendio), o di passarvi manualmente attraverso un ingresso
comandato.
Invertek Drives Ltd raccomanda l’uso di tre contattori di bypass per la predisposizione di un circuito di bypass. Si raccomanda
l’interlacciamento elettrico e meccanico per prevenire il guasto del contattore e per evitare danni al sistema.
Funzionamento generale:
Di seguito verrà illustrata la configurazione di base di un circuito di bypass con tre contattori,
mostrando l’interlacciamento meccanico tra il contattore di bypass e il contattore di uscita dell’azionamento. Si raccomanda anche
l’interlacciamento elettrico tra il bypass e l’uscita dell’azionamento servendosi di contatti ausiliari su ogni dispositivo.
Attenzione: La tensione di alimentazione della bobina dei contattori non deve eccedere il valore dei contatti dei relè di controllo
(250 V CA / 30 V CC @ 5 A)
www.invertek.co.uk
25
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Il commutatore principale serve per selezionare una delle seguenti condizioni:
Sistema spento: L’azionamento non è alimentato; il contattore di bypass è aperto
Modalità Bypass: L’azionamento non è alimentato; il contattore di bypass è chiuso, il motore è in funzione grazie
all’alimentazione del circuito bypass
Controllo dell’azionamento: L’azionamento è alimentato; il contattore di uscita o di bypass è controllato dall’azionamento
Quando l’interruttore principale è impostato per il controllo dell’azionamento, il contattore in ingresso è chiuso così da avviare l’azionamento.
La selezione dei due contattori in uscita del motore è controllata dall’azionamento in base ai valori impostati dall’utente. Quando viene
selezionato il controllo dell’Optidrive HVAC l’azionamento può coordinare l’alimentazione del motore tramite il circuito Bypass o l’uscita
dell’azionamento a seconda delle impostazioni e delle condizioni di funzionamento.
I due relè di controllo (relè 1 e relè 2) vengono automaticamente configurati quando la modalità Bypass è abilitata. Il relè 1 è configurato per
controllare il Bypass ed è collegato direttamente al contattore del Bypass. Il relè 2 è configurato per il controllo da parte dell’azionamento ed è
collegato direttamente al contattore di uscita. Durante il funzionamento normale l’azionamento chiuderà il relè 2, accendendo il contattore di
uscita, ed il funzionamento del motore dipenderà dalla configurazione del valore di logica e velocità dell’azionamento.
L’azionamento spegnerà il contattore di uscita (relè 2) e accenderà il contattore di bypass (relè 1) se una delle funzioni di controllo della
modalità Bypass è abilitata, e se la logica di avvio della funzione diventa vera. Le funzioni di controllo della modalità Bypass comprendono:
Bypass dovuto a
guasto
Bypass dovuto a
Modalità incendio
Bypass in ingresso
L’azionamento passerà in modalità Bypass se una condizione di blocco impedisce il
funzionamento del motore.
L’azionamento passerà in modalità Bypass se viene assegnata la Modalità incendio
ad un ingresso digitale e tale ingresso diventa vero (può essere aperto attivo oppure
chiuso attivo).
L’azionamento passerà in modalità Bypass se viene assegnato un ingresso digitale al
controllo del Bypass di controllo (attraverso i parametri del gruppo 9) e l’ingresso
diventa vero.
Nota: è possibile che si verifichino contemporaneamente diverse condizioni per l’attivazione della modalità Bypass.
Bypass dovuto a guasto. La modalità Bypass dovuto a guasto viene abilitata impostando il parametro P8-11=1 (abilitato). Una volta abilitato,
l’azionamento passerà alla modalità Bypass ogniqualvolta verrà riscontrato un blocco o guasto. In caso di blocco, l’azionamento aprirà
immediatamente il contattore di uscita (con l’uscita dell’azionamento già disabilitata a causa del blocco), attenderà un intervallo di tempo
(definito in P8-13) e poi chiuderà il contattore di bypass. Il motore rimarrà sotto il controllo della modalità di Bypass fino alla rimozione
dell’ingresso di abilitazione / avvio dall’azionamento (morsettiera 2), e a questo punto il contattore di bypass verrà aperto. Quando verrà
nuovamente richiuso l’ingresso di abilitazione / avvio, l’azionamento proverà ad avviarsi di nuovo (contattore di uscita chiuso).
È necessario che sia abilitata la modalità Spin Start (P2-26).
Bypass dovuto a Modalità incendio. La modalità Bypass dovuto a Modalità incendio viene abilitata impostando il parametro P8-12=1
(abilitato). Una volta abilitato, l’azionamento passerà alla modalità Bypass qualora venisse riscontrata l’attivazione della Modalità incendio
(logica vera). La modalità incendio va configurata (consultare la sezione 13.8, Funzionamento della Modalità incendio), e prima di abilitare il
Bypass dovuto a Modalità incendio assegnare un ingresso o tramite l’impostazione del parametro P1-13 o i parametri del gruppo 9 (P9-32).
Quando l’ingresso dedicato alla Modalità incendio diventa vero, l’azionamento disabiliterà immediatamente la sua uscita e aprirà il contattore
di uscita dell’azionamento, attenderà un intervallo di tempo (definito in P8-13) e poi chiuderà il contattore di bypass. Il motore rimarrà sotto il
controllo della modalità Bypass fino alla disattivazione della Modalità Incendio. Quando l’ingresso dedicato alla modalità incendio è disattivato,
il contattore del circuito bypass sarà aperto, si riscontrerà un breve ritardo (definito da P8-13) e il contattore dell’uscita dell’azionamento si
chiuderà. Se l’ingresso di abilitazione sarà ancora presente, l’azionamento controllerà il funzionamento del motore.
È necessario che sia abilitata la modalità Spin Start (P2-26).
Bypass in ingresso. La modalità bypass in ingresso viene abilitata assegnando un ingresso di bypass nel menu del gruppo 9. Impostare il
parametro P9-13 (Abilitazione ingresso di bypass) per uno degli ingressi digitali disponibili. Una volta che l’ingresso è stato assegnato,
l’azionamento passerà alla modalità di bypass qualora l’ingresso diventasse attivo (logica vera). L’azionamento disabiliterà immediatamente le
uscite e aprirà il contattore in ingresso, attenderà un intervallo di tempo (definito in P8-13) e poi chiuderà il contattore di bypass. Il motore
rimarrà sotto il controllo della modalità Bypass fino alla disattivazione dell’ingresso di bypass. Quando l’ingresso di bypass è disattivato, il
contattore del bypass sarà aperto e ci sarà un piccolo ritardo (definito in P8-13), il contattore di uscita dell’azionamento si chiuderà e
l’azionamento controllerà il funzionamento del motore. Se l’ingresso di abilitazione viene rimosso, l’azionamento si spegnerà
indipendentemente da quale dei due contattori di uscita è acceso. Quando l’azionamento verrà nuovamente abilitato, questo verificherà lo
stato dell’ingresso del bypass per determinare quale dei contattori di uscita far funzionare.
È necessario che sia abilitata la modalità Spin Start (P2-26).
In tutte le modalità operative, l’intervallo di tempo che trascorre tra lo spegnimento di uno dei contattori in uscita e l’accensione del
successivo viene definito dal parametro P8-13 (Tempo di commutazione bypass). Questo parametro va impostato con un valore che assicuri
che il primo contattore abbia il tempo di liberarsi prima di provare ad accendere il secondo. Effettuare inoltre l’interlacciamento meccanico o
elettrico.
Il display OLED visualizzerà la seguente schermata ogni volta che si attiva la modalità bypass sull’Optidrive HVAC:
26
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Installazione rapida:
Impostare i parametri di base da P1-01 a P1-10.
Impostare il parametro P1-14 = 201 per accedere ai parametri avanzati dei gruppi 8 e 9
Impostare il tempo di attesa tra lo spegnimento dei contattori di uscita al livello di sicurezza nel parametro P8-13 (l’impostazione di
default è 2 secondi).
Per Bypass dovuto a guasto:
Impostare la modalità bypass dovuto a guasto inserendo il valore 1 nel parametro P8-11 (abilitato)
Per Bypass in Modalità incendio:
Seguire la procedura di impostazione della Modalità incendio (sezione 13.6) prima di abilitare la funzione Bypass in Modalità
incendio.
Impostare la modalità di bypass dovuto a guasto inserendo il valore 1 nel parametro P8-12 (abilitato)
Per Bypass in ingresso:
Impostare il parametro P9-43 per l’avvio del bypass tramite ingresso digitale disponibile
Nota: Impostare i parametri del gruppo 9 P1-13 a 0 e programmare manualmente le funzioni di ingresso.
7.8. Modalità incendio
La Modalità incendio serve a garantire il funzionamento continuo dell’Optidrive HVAC fino alla disattivazione dell’ingresso dedicato alla
Modalità incendio, oppure fino a quando l’azionamento non è più in grado di funzionare. Viene utilizzata in applicazioni dove viene fornito
all’azionamento un ingresso da parte di un sistema di controllo per incendi, nel caso si sviluppi un incendio nell’edificio e occorra mantenere
l’azionamento in funzione il più a lungo possibile per eliminare il fumo o salvaguardare la qualità dell’aria.
Funzionamento generale:
La Modalità incendio prevede la possibilità di configurare l’ingresso digitale dedicato con il software Optidrive HVAC. È possibile assegnare un
ingresso per attivare la Modalità incendio in una delle modalità seguenti:
P1-13: La Modalità incendio può essere automaticamente configurata sull’ingresso digitale 2 immettendo i valori 4, 8, o 13 nel
parametro P1-13 (consultare la sezione 10.1 – Configurazione ingressi digitali).
P9-32: L’ingresso dedicato alla Modalità incendio può venire impostato tramite il parametro P9-32 e un ingresso digitale disponibile.
È necessario l’accesso ad un livello di sicurezza avanzata (il default è P1-14 = 201) per accedere ai parametri del gruppo 9.
La Modalità incendio si attiva non appena è assegnato un ingresso all’attivazione della funzione.
La selezione della logica viene effettuata tramite il parametro P8-09 – Logica modalità incendio, e può essere impostata ad aperto attivo (0) o
chiuso attivo (1). L’impostazione di default è aperto attivo, cosicché la perdita del segnale in ingresso comporti l’attivazione della modalità
incendio. La velocità di funzionamento dell’Optidrive HVAC durante la Modalità incendio è definita dal parametro P8-10 – Velocità modalità
incendio, e può essere impostata a qualunque valore fino a quello che indica la velocità massima della marcia in avanti o indietro (P1-01).
Quando un ingresso è configurato per attivare la Modalità incendio e tale ingresso si attiva, tutti gli altri ingressi vengono ignorati e ritornano
attivi soltanto quando la Modalità incendio è rimossa.
Attenzione: Le funzioni degli ingressi digitali (compresi Avvio / Arresto e Marcia in Avanti / Marcia indietro) vengono disabilitate
quando la Modalità incendio è attiva. L’azionamento può essere fermato solo rimuovendo la Modalità incendio o interrompendo
l’alimentazione principale.
Quando l’azionamento funziona in Modalità incendio verrà visualizzata la seguente schermata:
‘Fire Mode’
[In alternanza con
la Frequenza di
uscita]
Quando l’azionamento si trova in Modalità incendio verranno ignorati i seguenti blocchi / guasti:
Display
O-t
U-t
Th-FLt
E-trip
4-20 F
Ph-Ib
P-Loss
SC-trp
I_t-trp
Blocco
Surriscaldamento del dissipatore di calore
Raffreddamento dell’azionamento
Termistore del dissipatore guasto
Blocco esterno
Errore 4-20 mA
Sbilanciamento delle fasi
Blocco dovuto a perdita della fase in ingresso
Blocco dovuto a perdita di comunicazione
Blocco dovuto a sovraccarico
www.invertek.co.uk
27
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Quando l’azionamento si trova in Modalità incendio non verranno ignorati i seguenti blocchi / guasti:
Display
O-Volt
U-Volt
h O-I
O-I
Out-F
Blocco
Sovratensione del bus CC
Sottotensione del bus CC
Blocco dovuto a sovracorrente improvvisa
Sovracorrente istantanea in uscita
Guasto in uscita
P2-36 (Modalità di start) deve essere impostato a Auto-1, Auto-2, Auto-3, Auto-4, o Auto-5 a seconda del numero di ripristini automatici
desiderati, così da ripristinare automaticamente l’azionamento in seguito all’eventualità di uno dei blocchi / guasti non ignorati. Tra ogni
tentativo di ripristino verrà osservato un intervallo di 20 secondi.
Fare riferimento al menù del gruppo 0 per il funzionamento della Modalità incendio. Il tempo trascorso dall’avvio della Modalità incendio è
registrato dal parametro P0-51 – Tempo trascorso dall’attivazione della Modalità incendio (ore). Questo valore è riferito al contatore della vita
operativa dell’azionamento, cosicché sia visibile quanto tempo è trascorso dall’ultima attivazione della Modalità incendio.
La quantità di tempo in cui l’azionamento ha funzionato in Modalità incendio è registrata nel parametro P0-52 – Tempo trascorso in Modalità
incendio (minuti).
Attenzione: Il funzionamento in Modalità incendio potrebbe influenzare la durata della garanzia dell’Optidrive HVAC, o in alcuni
casi potrebbe invalidare la garanzia stessa. Contattare il distributore locale autorizzato Invertek per ulteriori informazioni.
Uno dei relè di uscita può essere impostato per segnalare quando l’azionamento sta funzionando in Modalità incendio. Per impostare il relè 1
immettere il valore 9 nel parametro P2-15. Per impostare il relè 2 immettere il valore 9 nel parametro P2-18.
Impostazione rapida:
Impostare i parametri di base da P1-01 a P1-10
Impostare P1-14 = 201 per accedere ai parametri avanzati dei gruppi 8 e 9
Impostare la logica per l’ingresso dedicato alla Modalità incendio in P8-09: 0 = Aperto attivo, 1 = Chiuso attivo.
Impostare la velocità necessaria per il funzionamento dell’azionamento in Modalità incendio al parametro P8-10
Immettere in P1-13 un valore che attivi la Modalità incendio sull’ingresso digitale 2 (4, 8, o 13).
OPPURE
Immettere in P9-32 un valore per un ingresso digitale disponibile. P1-13 deve essere impostato a 0. Tutti gli altri ingressi digitali
devono essere configurati tramite i parametri del gruppo 9.
Se necessario, impostare P2-15 o P2-18 = 9 per configurare il relè di uscita 1 o 2 per indicare l’attivazione della Modalità incendio.
7.9. Pre-riscaldamento del motore con iniezione di tensione continua
È possibile configurare l’Optidrive HVAC per l’iniezione di tensione continua nel motore all’avvio o all’arresto, oppure per il mantenimento di
tensione magnetica nel motore quando la velocità di riferimento dell’azionamento è impostata a 0. L’applicazione di tensione al motore crea
una corrente circolante negli avvolgimenti del motore che riscalda il motore e impedisce la formazione di condensa sulla sua superficie; tale
condensa può essere determinata dal funzionamento del motore in condizioni ambientali particolarmente sottoposte ad umidità, o
dall’esposizione a basse temperature ambientali, o da variazioni nella temperatura del motore (in maniera particolare durante il
raffreddamento).
Funzionamento generale: Impostare la l’iniezione di tensione DC continua in frenatura all’avvio o all’arresto
Questa funzione utilizza i parametri dell’iniezione di tensione continua all’avvio o all’arresto del motore per creare un flusso di corrente e
mantenere una temperatura conveniente prima dell’avvio o dopo l’arresto. I parametri necessari alla configurazione dell’iniezione di tensione
continua sono contenuti nel menù del gruppo 6, il cui accesso è possibile solo effettuando l’accesso ad un livello di sicurezza avanzato (il valore
di default è P1-14=201). La tensione applicata al motore viene determinata dal parametro P6-18 (Iniezione tensione DC in frenatura). È
possibile monitorare la corrente sul display OLED visualizzando gli ampére (premere il tasto Navigate e scorrere i valori sul display fino a
visualizzare gli A).
Attenzione: Accertarsi sempre del valore di corrente massima applicabile al motore fermo prima di impostare la funzione di
iniezione di corrente continua. Potrebbe rendersi necessario contattare il costruttore del motore per inserire i valori corretti per il
funzionamento. Verificare il funzionamento dell’azionamento per assicurarsi che i valori della corrente si mantengano entro i limiti
specificati.
La durata di applicazione della tensione continua all’avvio del motore viene impostata col parametro P6-11 (Ritardo all’abilitazione). Il tempo
impiegato ad applicare l’iniezione di corrente continua all’arresto del motore viene impostato dal parametro P6-12 (Ritardo alla
disabilitazione). Il valore immesso in P6-11 o in P6-12 individua in per quanto tempo verrà applicata l’iniezione DC (fino ad un massimo di 250
secondi). La funzione è attivata da un segnale di abilitazione / disabilitazione (generalmente ingresso digitale 1 – morsetto di controllo 2) che
porta ad una condizione di abilitazione (avvio) o disabilitazione (arresto).
La velocità per il ritardo all’abilitazione è determinata dalla velocità preimpostata 7 (P2-07), mentre la velocità del ritardo alla disabilitazione è
determinata dalla velocità preimpostata 8 (P2-08). Questi parametri vanno impostati a 0 per la funzione di iniezione di tensione continua.
28
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Nota: La velocità preimpostata 7 (P2-07) e la velocità preimpostata 8 (P2-08) vengono utilizzate anche come velocità boost per il controllo
PID (consultare la sezione 8), pertanto l’iniezione di tensione continua non può venire utilizzata quando il controllo PID è abilitato (P112=3).
Abilitare Ramp to Stop (P1-05=0) e immettere valori di rampa adeguati in P1-03 e P1-04.
Di seguito è riportato il profilo di velocità nel tempo relativo all’iniezione di tensione continua.
Pericolo: L’uscita dell’azionamento collegata al motore rimarrà attiva mentre è applicata la frenatura per iniezione di tensione
continua. Disconnettere sempre l’alimentazione principale ed attendere 10 minuti prima di effettuare qualunque tipo di
intervento sull’azionamento o sul motore.
Impostazione rapida: Impostazione della frenatura per iniezione di tensione continua all’avvio o all’arresto
Impostare i parametri di base da P1-01 a P1-10.
Assicurarsi che P1-05 sia impostato a 0, Ramp to Stop. Assicurarsi che siano stati immessi dei valori di rampa adeguati in P1-03 e P104.
Impostare P1-14 = 201 per accedere ai parametri avanzati del gruppo 6.
Impostare a 0 Hz le velocità preimpostate 7 e 8 (P2-07 e P2-08).
Impostare il tempo di frenatura per iniezione di tensione continua all’avvio in P6-11.
Impostare il tempo di frenatura per iniezione di tensione continua all’arresto in P6-12.
Impostare la tensione continua applicata per la frenatura in P6-18.
Verificare i valori di corrente e la temperatura del motore sul display OLED e assicurarsi che rimangano entro i limiti specificati dal
costruttore.
Funzionamento generale: Impostazione della frenatura per iniezione di tensione continua a velocità di riferimento 0
Questa funzione utilizza il boost di tensione quando l’azionamento raggiunge la velocità 0 per creare un flusso di corrente e mantenere nel
motore un livello di temperatura adeguato. La modalità di standby deve essere disabilitata cosicché la corrente di uscita dell’azionamento non
venga messa automaticamente in standby a seguito del funzionamento a velocità di riferimento 0.
La tensione continua iniettata viene impostata col parametro P1-11 (Boost di tensione). È possibile monitorare la corrente sul display OLED
visualizzando gli ampére (premere il tasto Navigate e scorrere i valori sul display fino a visualizzare gli A).
Attenzione: Accertarsi sempre del valore di corrente massima applicabile al motore fermo prima di impostare la funzione di boost
di tensione. Potrebbe essere necessario contattare il costruttore del motore per confermare i valori corretti per il funzionamento.
Verificare il funzionamento dell’azionamento per assicurarsi che i valori della corrente si mantengano entro i limiti specificati.
Il valore del tempo in modalità standby (P2-27) deve essere 0, così da disabilitare la modalità di standby ed assicurarsi che la tensione di boost
venga applicata mentre l’azionamento è abilitato a velocità di riferimento 0.
Abilitare Ramp to Stop (P1-05=0) e immettere valori di rampa adeguati in P1-03 e P1-04.
Qualora fosse necessario un ingresso per attivare l’arresto del motore con la tensione di boost, configurare un ingresso digitale alla velocità
preimpostata 1 (consultare la sezione 8.1) e impostare a 0 Hz il valore della velocità reimpostata 1 (P2-01).
Installazione rapida: Impostazione della frenatura per iniezione di tensione continua a velocità di riferimento 0
Impostare i parametri di base da P1-01 a P1-10.
Assicurarsi che P1-05 sia impostato a 0, Ramp to Stop. Assicurarsi che siano stati immessi dei valori di rampa adeguati in P1-03 e P104.
Impostare P1-14 = 201 per accedere ai parametri avanzati del gruppo 6.
Impostare P2-27 = 0 per disabilitare la modalità di standby dell’azionamento (default)
Qualora fosse necessario un ingresso digitale per attivare l’arresto del motore con la tensione di boost, assicurarsi che P1-13 sia
impostata a 1 (default). L’ingresso digitale 2 (morsetto di controllo 3) è così impostato per questa funzione. Assicurarsi che P2-01 = 0.
Impostare la tensione di boost nel parametro P1-11.
Verificare i valori di corrente e la temperature del motore sul display OLED e assicurarsi che questi rimangano entro i limiti specificati
dal costruttore.
www.invertek.co.uk
29
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
8. Applicazioni del controllo PID
8.1. Panoramica
Il controllo PID è una funzione matematica che serve ad automatizzare le regolazioni del sistema sostituendo l’attività di un tecnico che dedichi
costante attenzione al funzionamento del dispositivo ed effettui regolazioni manuali. Nel caso di un azionamento, questo si traduce nella
regolazione automatica della velocità del motore per mantenere un valore specifico misurato da un rilevatore di misura del sistema, con il
valore di riferimento fornito direttamente all’azionamento. Per esempio, quando l’Optidrive HVAC controlla una pompa, potrebbe essere
necessario mantenere una pressione proporzionale alla velocità alla quale l’azionamento pilota il motore. La pressione richiesta (definita
“valore di riferimento” o “set point”) è fornita all’azionamento. Il sensore di misura è collegato all’ingresso analogico dell’azionamento e
fornisce una misura della pressione del sistema (retroazione). La funzione di controllo PID confronta il valore di riferimento e il segnale di
retroazione e modifica la velocità del motore per far sì che il valore di retroazione aumenti o diminuisca fino a raggiungere il valore di
riferimento. Qualora il valore di riferimento dovesse essere modificato, l’azionamento modificherà di nuovo la velocità del motore per
equiparare il valore del segnale di retroazione al nuovo valore di riferimento.
La differenza istantanea tra i segnali relativi ai valori di riferimento e di retroazione in tempo reale è nota come errore PID. “PID” sta per P proporzionale, I - integrale, D – derivativo e descrive le tre funzioni matematiche applicate al segnale di errore, che sommate costituiscono il
riferimento per controllare la velocità del motore. Regolando i valori associati alle funzioni P, I, e D, chi configura l’azionamento può
programmare la risposta dinamica all’errore PID e la stabilità della velocità di uscita del motore. Il raggiungimento della miglior risposta
dinamica possibile e il mantenimento della stabilità del sistema tramite la regolazione dei valori utilizzati dalle funzione P, I e D è noto come
“taratura del controllo PID”.
Attenzione: La taratura dei valori del controllo PID potrebbe provocare una risposta dinamica da parte del motore e introdurre
instabilità nel controllo della velocità del motore. La taratura del controllo PID deve essere eseguita solamente da personale
esperto.
L’Optidrive HVAC controlla la velocità del motore tramite un controllo PID completo a 3 termini. Il valore di riferimento PID può essere di tipo
analogico o digitale. Il feedback avviene tramite uno dei due ingressi analogici attestati alla morsettiera standard dell’azionamento. Tutti i
valori vengono considerati internamente in % per consentire una regolazione semplice. Il controllo PID è abilitato quando P1-12 = 3.
Di seguito è riportato il diagramma a blocchi relativo al controllore PID interno dell’azionamento.
8.2. Impostazione della funzione PID
8.2.1.
Selezione del valore di riferimento PID
Il valore di riferimento del controllo PID può essere rappresentato da un segnale analogico o digitale fisso. La selezione del riferimento viene
effettuata impostando il parametro P3-05 (Selezione riferimento PID). Sia l’ingresso analogico 1 (morsetto 6) che 2 (morsetto 10) possono
venire configurati per determinare il riferimento. Il formato del riferimento analogico comprende tutti gli standard previsti. P2-30 determina il
formato del segnale dell’ingresso analogico 1, mentre P2-33 determina il formato del segnale dell’ingresso analogico 2.
Il parametro P3-06 (Valore riferimento digitale PID) può fornire un riferimento digitale e P3-05 essere impostato per fornire un riferimento per
questo valore (P3-05=0). Un altro riferimento digitale è individuato da P3-15 (2° valore digitale di riferimento), un ingresso digitale può essere
configurato per passare da un riferimento digitale all’altro (fare riferimento al parametro P1-13 e consultare la sezione 8 – Funzioni ingressi
digitali). Quando non è impostata alcuna selezione digitale, il riferimento digitale PID è sempre determinato da P3-06. Il valore di riferimento
del controllo PID può essere visualizzato nel parametro di sola lettura P0-08 – Riferimento ingresso PID (Setpoint).
I riferimenti digitali per il controllo PID (P3-06 e P3-15) forniscono valori di riferimento fissi per il controllo PID, e possono anche essere
modificati tramite comunicazione seriale o attraverso le funzionalità PLC dell’azionamento.
30
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
8.2.2.
Selezione del segnale di retroazione PID
Il segnale di retroazione del controllo PID può essere configurato su entrambi gli ingressi analogici. Se si utilizza un ingresso analogico per il
riferimento PID, allora non lo si potrà utilizzare anche per la retroazione. La selezione del segnale di retroazione PID si effettua attraverso il
parametro P3-10 (Selezione segnale di retroazione PID). Sia l’ingresso analogico 1 (morsetto 6) che 2 (morsetto 10) possono essere configurati
per fornire il segnale di retroazione. Il formato del segnale analogico di retroazione può essere configurato per uniformarsi al sensore di
retroazione secondo tutti gli standard previsti. P2-30 determina il formato del segnale dell’ingresso analogico 1 e P2-33 determina il formato
del segnale dell’ingresso analogico 2.
8.2.3.
Selezione della modalità operativa PID
Il funzionamento di default prevede che l’azionamento risponda ad un aumento del segnale di retroazione diminuendo la velocità del motore,
e viceversa, così da regolare il segnale di retroazione al valore di riferimento. Questa modalità operativa è indicata come “Modalità diretta” del
controllo PID. Per esempio, quando in un impianto di pompaggio la pressione aumenta e il segnale di retroazione aumenta, allora
l’azionamento rallenterà la pompa così da ridurre la pressione. Questa modalità operativa corrisponde alla modalità operativa di default
dell’azionamento, e può venire selezionata impostando P3-04=0 (Modo operativo PID = Modalità diretta).
La modalità operativa inversa ha luogo quando un aumento del segnale di retroazione comporta un aumento della velocità del motore. Questa
modalità operativa è riferita come “Modalità inversa” del controllo PID. Per esempio, nel caso della ventola di un condensatore in cui il segnale
di retroazione aumenta per via dell’aumento del carico sul condensatore, la ventola verrà fatta funzionare a velocità più elevata. Questa
modalità operativa può essere selezionata impostando P3-04=1 (Modo operativo PID = Modalità inversa).
La selezione della modalità operativa PID è così riassunta:
Impostazione parametro
P3-04
0
Modalità
selezionata
Modalità
diretta
Retroazione
Motore
Il segnale aumenta
La velocità
diminuisce
La velocità
aumenta
La velocità
aumenta
La velocità
diminuisce
Il segnale diminuisce
1
Modalità
inversa
Il segnale aumenta
Il segnale diminuisce
8.2.4.
Limiti uscita del controllo PID
È possibile impostare dei limiti nell’uscita del controllo PID indipendentemente dai limiti massimi e minimi di velocità impostati nei parametri
P1-01 e P1-02. Questo significa che si possono applicare diversi valori massimi e minimi o limiti variabili quando l’azionamento passa dal
controllo PID alla velocità preimpostata (attraverso un ingresso digitale). Il parametro P3-09 – Limite uscita controllo PID determina la modalità
utilizzata per determinare i limiti di uscita PID. Sono disponibili le seguenti opzioni:
Parametro P3-09
0
1
2
3
Descrizione
Il limite digitale preimpostato (P3-07 e P3-08) servirà da limite per l’uscita del controllo PID
L’ingresso analogico 1 (morsetto 6) verrà usato come limite massimo di uscita
L’ingresso analogico 1 (morsetto 6) verrà usato come limite minimo di uscita
L’ingresso analogico 1 (morsetto 6) verrà usato come valore di riferimento e aggiunto all’uscita
del controllo PID
Il diagramma a blocchi nella sezione 8.1 illustra i limiti applicati quando P3-09 è impostato a 0. Quando vengono impostati altri valori in P3-09 i
limiti per l’uscita PID sono determinati secondo le modalità indicate nella tabella soprastante.
Quando P3-09=0 (impostazione di default) i limiti sono determinati digitalmente dai parametri P3-07 e P3-08 e i limiti del controllo PID
vengono calcolati come segue: Limite superiore = P3-07 * P1-01: (Un valore del 100% limita la velocità massima del controllo PID alla velocità
massima impostata in P1-01). Limite inferiore = P3-08 * P1-01
8.2.5.
Valori di rampa del controllo PID
I valori di rampa standard definiti in P1-03 e P1-04 sono normalmente attivi quando l’azionamento opera in modalità PID. P3-11 (Errore PID per
abilitazione rampa) può essere impostato per determinare un limite all’errore PID, per cui le rampe vengono abilitate o disabilitate a seconda
della grandezza dell’errore PID. Se la differenza tra il valore di riferimento e il valore di feedback è inferiore al limite impostato in P3-11, i tempi
di rampa interni verranno disabilitati. Qualora si verificasse un errore PID più grande, i tempi di rampa verranno abilitati. In questo modo la
modifica della velocità del motore per errori PID grandi verrà limitata, mentre la reazione ad errori PID più piccoli sarà più rapida. Impostare
P3-11 a 0 significa che le rampe sono sempre abilitate.
Attenzione: Prestare attenzione nella regolazione del parametro P3-11. La disabilitazione delle rampe potrebbe provocare una
reazione critica del motore a errori maggiori del controllo PID, e la taratura del controllo PID potrebbe avere effetti contrari.
8.2.6.
Taratura del guadagno del controllo PID
Come in ogni controllo PID, il comportamento e la risposta del sistema sono controllati dal fattore di guadagno proporzionale (P3-01), dalla
costante di tempo integrale (P3-02) e dalla costante di tempo differenziale (P3-03). È essenziale impostare correttamente tali parametri in
modo da garantire la stabilità e l’affidabilità del sistema. Esistono molti libri e metodi che illustrano il funzionamento e la taratura di un
controllore PID, pertanto qui di seguito verrà dato soltanto un breve riepilogo.
www.invertek.co.uk
31
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
P3-01 Guadagno proporzionale: da 0,1 a 30, impostazione di default 1
Il guadagno proporzionale funge da moltiplicatore della differenza tra i valori dei segnali di feedback e di riferimento. Il controllo PID
determina l’errore PID per calcolo diretto
Errore PID = valore di riferimento PID – Feedback PID
Il guadagno proporzionale viene poi moltiplicato per il valore dell’errore PID. Se le costanti di tempo integrale e differenziale sono entrambe a
0, allora Uscita PID = Guadagno proporzionale x (valore di riferimento PID – Feedback PID).
Un valore grande del guadagno proporzionale comporterà una maggiore variazione nella frequenza di uscita a fronte di una piccola differenza
tra il valore di feedback e quello di riferimento. Se il valore è troppo grande, il sistema sarà probabilmente instabile e la velocità di uscita del
motore oltrepasserà il valore di riferimento. Valori elevati sono accettabili nel caso di applicazioni dinamiche in cui la risposta deve essere
rapida. Valori contenuti dovrebbero essere utilizzati per sistemi che rispondono con maggior ritardo, come nel caso di applicazioni di controllo
di ventole e pompe. Se il sistema tende ad oltrepassare il limite, riducendo il guadagno proporzionale si ridurrà il livello di superamento del
valore di riferimento.
P3-02 Costante di tempo integrale: da 0 a 30, impostazione di default 1
La costante di tempo integrale è una funzione basata sul tempo che modifica l’uscita del controllo PID basandosi sulla variazione dell’errore
PID in un determinato intervallo di tempo. La costante di tempo integrale tenderà sempre a ridurre l’errore PID a 0 (in modo che il valore del
segnale di retroazione e quello di riferimento coincidano). Nel caso di sistemi dinamici il cui tempo di risposta è rapido, il valore dovrà essere
minore. Nel caso di sistemi il cui tempo di risposta è lento, come applicazioni per il controllo della temperatura, si richiederà un valore
maggiore applicato alla variabile del tempo.
P3-03 Costante di tempo differenziale: da 0 a 1, impostazione di default 0
Anche la costante di tempo differenziale è una funzione basata sul tempo che modifica l’uscita del controllo PID basandosi sulla variazione del
valore di riferimento. Nella maggior parte delle applicazioni, si otterranno i migliori risultati lasciando a 0 l’impostazione del parametro P3-03.
L’utente dovrà regolare i parametri del controllo PID (guadagno P, guadagno I, guadagno D) rispettivamente in P3-01, P3-02 e P3-03
per ottenere le migliori prestazioni. I valori dipenderanno dall’inerzia del sistema e dalla costante di tempo (velocità di variazione) del
sistema.
8.2.7.
Modalità PID Sleep (riposo) e Wake (risveglio)
L’Optidrive HVAC può essere configurato per disabilitare l’uscita durante il funzionamento in modalità PID quando la velocità di uscita del
motore scende al di sotto di un valore preimpostato. Tale condizione è definita modalità Sleep o standby (riposo). Generalmente, le
applicazioni con ventole e pompe non svolgono lavoro utile quando funzionano al limite inferiore di velocità, pertanto la funzione di Sleep
consente all’azionamento di risparmiare energia durante periodi di funzionamento che sarebbero comunque poco efficienti spegnendo del
tutto l’uscita del motore. La modalità Sleep viene regolata attraverso il parametro P3-14. Viene programmato anche un intervallo di tempo di
intervento per la modalità Sleep, in modo tale che la velocità del motore debba rimanere al di sotto del valore impostato in P3-14 per la durata
dell’intervallo di tempo programmato in P2-27 (Tempo modo standby) prima dell’attivazione della funzione di Sleep. La modalità Sleep viene
disattivata quando P2-27 = 0.
Quando l’Optidrive HVAC entra in modalità Sleep, è possibile applicare all’azionamento anche l’indipendente modalità Wake (risveglio). Il
valore riferito alla modalità Wake serve a far uscire l’azionamento dalla modalità Sleep per tornare a funzionare normalmente. L’impostazione
di limiti per le modalità Sleep e Wake permette di individuare del valori limite che impediscano all’azionamento di entrare e uscire
continuamente dalla modalità Sleep, e tali valori possono essere impostati per massimizzare l’efficienza operativa del sistema. Il limite per la
modalità Wake viene impostato con il parametro P3-13 – Livello di retroazione per Wake up PID e rappresenta una percentuale del segnale di
retroazione, cosicché quando il segnale di feedback raggiunge un determinato livello l’azionamento esce dalla modalità Sleep e il controllo PID
viene nuovamente abilitato.
8.2.8.
Ciclo di Boost PID per Sleep e Wake
È possibile configurare l’Optidrive HVAC per eseguire un ciclo di boost predefinito all’avvio o alla conclusione della modalità Sleep. Questa
funzione può essere utilizzata per aumentare la pressione della pompa prima che l’azionamento entri in modalità Sleep, cosicché questo sia in
grado di restare in modalità Sleep per un intervallo di tempo maggiore (si consiglia di evitare di passare troppo frequentemente da una
modalità all’altra). La funzione di boost in modalità Wake potrebbe essere utile per eseguire un ciclo che riporti rapidamente il sistema al
funzionamento normale, prima di ritornare in modalità controllo PID.
Il boost della pompa in modalità Wake viene abilitato quando il Ritardo all’abilitazione (P6-11) è impostato ad un valore diverso da 0. Il
parametro P6-11 comprende l’intervallo di tempo in cui l’azionamento eseguirà un ciclo di boost in modalità Wake. La velocità del ciclo di
boost corrisponde alla velocità preimpostata 7 (P2-07). Il grafico della velocità in funzione del tempo di seguito riportato costituisce un
esempio di comportamento durante il ciclo di boost in modalità Wake.
32
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Il boost della pompa in modalità Sleep viene abilitato quando il Ritardo disabilitazione (P6-12) è impostato ad un valore diverso da 0. Il
parametro P6-12 comprende l’intervallo di tempo in cui l’azionamento eseguirà un ciclo di boost prima di entrare in modalità Sleep. La velocità
del ciclo di boost corrisponde alla velocità preimpostata 8 (P2-08). Il grafico della velocità in funzione del tempo di seguito riportato costituisce
un esempio di comportamento durante il ciclo di boost in modalità Sleep.
Il tempo di esecuzione del ciclo di boost in modalità sia Sleep che Wake (P6-11 e P6-12) comprende il tempo necessario per raggiungere la
velocità di boost (P2-07 e P2-08), ma non il tempo necessario per accelerare o decelerare una volta che il ciclo di boost è terminato. Questo
risulta chiaro nei diagrammi di tempo. Quando la funzione boost in modalità Sleep è attivata, l’Optidrive HVAC eseguirà il ciclo di boost in
modalità Sleep ogni qual volta l’azionamento verrà arrestato o disabilitato. Quando la funzione boost in modalità Wake è attivata, l’Optidrive
HVAC eseguirà il ciclo di boost in modalità Wake ogni qual volta l’azionamento verrà avviato o abilitato.
8.3. Esempi di applicazioni
Utilizzo di un Optidrive HVAC per controllare la pressione in un impianto di pompaggio semplice.
Di seguito è riportato lo schema relativo ad un impianto di pompaggio semplice.
L’Optidrive HVAC mantiene la pressione in uscita della pompa al valore di riferimento e mantiene tale valore mentre vengono aperte e chiuse
diverse valvole in uscita.
Innanzitutto il sensore di pressione viene collegato all’ingresso analogico 2 dell’azionamento (morsetto 10). Vengono poi modificati i seguenti
parametri per permettere all’HVAC di accettare il segnale di retroazione del sensore.
P3-10 = 0 (default): Imposta l’ingresso analogico 2 come sorgente della retroazione PID
P2-33 = t 4-20: Permette all’ingresso analogico 2 di accettare un valore di riferimento 4-20 mA e di bloccarsi se perde il segnale.
Successivamente il segnale di riferimento del sistema di controllo viene collegato all’ingresso analogico 1 (morsetto 6). Vengono poi modificati
i seguenti parametri per permettere all’HVAC di accettare il segnale di riferimento del sistema.
P3-05 = 1: Imposta l’ingresso analogico 1 come sorgente del valore di riferimento PID
P2-30 = U 0-10 (default): Permette all’ingresso analogico 1 di accettare un valore di riferimento di 0-10 V
www.invertek.co.uk
33
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Infine vengono configurate e regolate le impostazioni PID.
Impostare P1-12 = 3: Imposta il controllo dell’azionamento in modalità PID (abilitazione del controllo PID)
Impostare P3-04 = 0 (default): Seleziona la modalità diretta. Alla diminuzione del segnale di retroazione (perdita di pressione) la
velocità della pompa verrà aumentata, e viceversa.
A seconda dei valori di default, vengono tarati i valori del guadagno PID rispettivamente nei parametri P3-01, P3-02 e P3-03 per
garantire le migliori prestazioni.
Aggiungere limiti per le modalità Sleep e Wake all’impianto di pompaggio
Secondo lo schema dell’impianto di pompaggio (sopra), le prestazioni dell’impianto saranno ridotte quando la velocità scende sotto i 20 Hz.
L’azionamento dovrà spegnere la pompa se la velocità della pompa scende sotto i 20 Hz per più di un minuto. La pompa ripartirà quando
l’errore di retroazione aumenterà oltre il 10%. Vengono applicate le seguenti impostazioni:
P3-14 = 20 Hz: Soglia velocità standby. La funzione di standby viene attivata quando l’azionamento scende sotto i 20 Hz per un
intervallo di tempo superiore al valore impostato in P2-27
P2-27 = 60 s: Tempo modo standby. La funzione di standby viene attivata quando l’azionamento scende sotto il valore impostato in
P3-14 per più di 60 secondi.
P3-13 = 10%: L’azionamento si riavvierà (Wake) quando l’errore PID aumenta oltre il 10%.
9. Parametri
9.1. Impostazione generale dei parametri
Il set di parametri dell’Optidrive HVAC consiste di 9 gruppi:
Gruppo 1 – Parametri di base
Gruppo 2 – Parametri estesi
Gruppo 3 – Parametri del controllo PID
Gruppo 4 – Parametri del controllo motore
Gruppo 5 – Parametri fieldbus
Gruppo 6 – Parametri riservati (Funzionalità avanzate: consultare il Manuale d’uso avanzato)
Gruppo 7 – Parametri riservati (Non disponibili)
Gruppo 8 – Parametri funzioni specifiche HVAC
Gruppo 9 –Logica di controllo avanzata dell’azionamento (Funzionalità avanzate: consultare il Manuale d’uso avanzato)
Gruppo 0 – Monitoraggio parametri e diagnostica (solo lettura)
Quando sull'Optidrive sono state ripristinate le impostazioni di fabbrica, o quando questo è uscito dalla fabbrica, sarà possibile accedere
soltanto ai parametri del gruppo 1.
Per accedere ai parametri degli altri livelli, P1-14 deve essere impostato allo stesso valore di P2-40 (impostazione di default = 101). In questa
maniera si potrà accedere ai parametri dei gruppi 1 - 5, in aggiunta ai 39 parametri del gruppo 0. Tali parametri sono elencati nelle tabelle
sottostanti.
Per accedere ai parametri avanzati, P1-14 deve essere impostato allo stesso valore di P6-30 (impostazione di default = 201); in questo modo si
potrà accedere a tutti i gruppi e tipi di parametri. La descrizione dei parametri avanzati è reperibile nel Manuale d’uso avanzato.
I valori indicati tra parentesi () sono da considerarsi impostazioni di default per i modelli con caratteristiche nominali definite in HP.
9.2. Gruppo 1 – Parametri di base
Par
Descrizione
P1-01
Frequenza Massima / Limite Velocità
P1-02
120
50 (60)
Limite massimo di frequenza / velocità – visualizzato in Hz o Rpm
Se P1-10 >0, il valore immesso / mostrato è in Rpm
Frequenza Minima / Limite Velocità
0
P1-01
0
Hz / Rpm
Limite minimo di frequenza / velocità – visualizzato in Hz o Rpm.
Se P1-10 >0, il valore immesso / mostrato è in Rpm
Tempo rampa accelerazione
0
6000
30
Secondi
Tempo di accelerazione da 0 fino alla velocità base di (P1-09). Visualizzazione in secondi.
Tempo rampa decelerazione
0
6000
30
Secondi
Tempo di decelerazione da velocità base (P1-09) all’arresto visualizzato in secondi. Quando impostato al valore 0, il motore si arresta
il più rapidamente possibile senza generare un blocco.
Modalità di stop
0
1
0
0 : Ramp To Stop. In caso di mancanza del segnale di abilitazione, l'azionamento decelererà fino ad arrestarsi, con il valore controllato
da P1-04 come descritto sopra.
1 : Coast to Stop. In caso di mancanza del segnale di abilitazione, il motore rallenterà spontaneamente per inerzia (freewheel) fino ad
arrestarsi.
P1-02
P1-03
P1-04
P1-05
34
Minimo
www.invertek.co.uk
Massimo
Default
Unità di
misura
Hz / Rpm
P1-06
P1-07
P1-08
P1-09
P1-10
P1-11
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Risparmio energia
0
1
0
0 : Disabilitato
1 : Abilitato. Quando è abilitato, il Risparmio energetico riduce la tensione al motore per carichi leggeri e velocità costante. La
tensione applicata al motore viene ridotta. La modalità Risparmio energetico è intesa per applicazioni in cui l'azionamento può
funzionare per alcuni periodi con velocità costante e carichi leggeri.
Tensione nominale motore
0
250 / 500
230 / 400 (460)
V
Imposta il dato di targa della tensione nominale del motore. Viene visualizzato in Volt (V).
[dipende
Corrente nominale
100% corrente
Corrente nominale motore
A
dall’azionamento]
azionamento
Imposta il dato di targa della corrente nominale del motore
Intervallo dei parametri:
Taglia 2, da min 10% a max 100% della corrente nominale dell’azionamento
Taglia da 3 a 7, da min 20% a max 100% della corrente nominale dell’azionamento
Frequenza nominale motore
25
120
50 (60)
Hz
Imposta il dato di targa della frequenza nominale del motore.
Velocità nominale motore
0
7200
0
Rpm
Questo parametro può essere impostato opzionalmente al dato di targa della frequenza nominale del motore (Rpm). Quando
impostato al valore 0, tutti i relativi parametri di velocità vengono visualizzati in Hz, e la compensazione dello scorrimento del motore
viene disabilitata. L'inserimento del dato di targa del motore abilita la funzione di compensazione dello scorrimento, e il display
mostrerà la velocità stimata del motore in Rpm. Tutti i relativi parametri di velocità, come la Velocità minima e massima, la velocità
preimpostata ecc. vengono visualizzati in Rpm.
15 – 30%
0,5 – 2,5%
Boost di tensione in modalità V/F
0
%
[Dipende
dall’azionamento]
P1-12
P1-13
P1-14
nominale
azionamento
[Dipende
dall’azionamento]
L'aumento di tensione (boost) viene utilizzato per aumentare la tensione sul motore a basse frequenze in uscita, così da ottimizzare la
velocità e la coppia di spunto. Una tensione di alimentazione eccessiva può provocare un aumento di corrente e temperatura nel
motore, nel qual caso potrebbe rendersi necessaria la ventilazione forzata del motore.
È possibile inserire un'impostazione automatica (),cosicché l'Optidrive imposti automaticamente questo parametro basato sui
parametri del motore misurati durante la configurazione automatica con la procedura Auto-Tune (vedere il parametro P4-02).
Selezione modo operativo
0
6
0
0: Controllo da morsettiera. L'azionamento risponde direttamente ai segnali applicati ai morsetti di controllo.
1: Controllo unidirezionale da tastierino. L'azionamento può essere controllato unidirezionalmente usando il tastierino integrato o
remoto.
2: Controllo bidirezionale da tastierino. L'azionamento può essere controllato bidirezionalmente usando il tastierino integrato o
remoto. Premendo il tasto START si seleziona la Marcia Avanti e Indietro.
3: Controllo PID. La frequenza in uscita è regolata dal controllore PID interno.
4: Controllo Fieldbus Il funzionamento avviene tramite il fieldbus selezionato (parametri gruppo 5) – escluso BACnet (vedere
l’opzione 6)
5: Modalità Slave. L'azionamento funziona da Slave per un Optidrive connesso che opera in modalità Master.
6: Modalità BACnet. L’azionamento comunica / funziona da Slave in una rete BACnet.
Funzione ingressi digitali
0
13
1
Definisce il funzionamento degli ingressi digitali. Quando impostato a 0, gli ingressi sono definiti dall’utente utilizzando i parametri del
gruppo 9 o le funzionalità PLC presenti nel software OptiTools Studio PC. Quando il valore impostato è diverso da 0, la configurazione
degli ingressi digitali è definita dalla tabella di definizione degli ingressi digitali (consultare la sezione 8.1)
Accesso menù esteso
0
30000
0
Permette l'accesso ai parametri estesi. Valori di accesso applicabili:
P1-14 <> P2-40 e P1-14 <> P6-30: consente l’accesso esclusivamente ai parametri del gruppo 1
P1-14 = P2-40 (101 default): consente l’accesso ai parametri dei gruppi 0 – 5 e del gruppo 8
P1-14 = P6-30 (201 default): consente l’accesso ai parametri dei gruppi 0 - 9
www.invertek.co.uk
35
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
10. Configurazione ingressi digitali
10.1. Configurazione ingressi digitali - Parametri P1-13
P1-13
*(2)
0
1
*(3)
2
3
4
5
6
7
8
9
*(3)
10
*(3)
11
12
13
Controllo
locale
(manuale)
Ingresso digitale 1
(Morsetto 2)
Ingresso digitale 2 Ingresso digitale 3
(Morsetto 3)
(Morsetto 4)
Ingresso
analogico 1
(Morsetto 6)
Ingresso
analogico 2
(Morsetto 10)
Tutte le funzioni sono definite dall’utente nel menù 9 o configurate attraverso le funzionalità PLC del software
OptiTools Studio PC
O: Operatività
normale
O: Stop
O: Controllo remoto Ingresso
Ingresso
C: Velocità
C: Marcia
C: Controllo locale
analogico 1
analogico 2
preimpostata 1 / PI
Ingresso
Set-point 2
analogico 2 O: Nessuna funzione
O: Stop (disabilitato) O: Controllo remoto Ingresso
Ingresso
C: Pulsante avviamento C: Marcia (abilitato) C: Controllo locale
analogico 1
analogico 2
O: Stop
O: Marcia in avanti O: Controllo remoto Ingresso
Ingresso
C: Marcia
C: Marcia indietro
C: Controllo locale
analogico 1
analogico 2
O: Modalità
O: Stop
“Incendio” *(1)
O: Controllo remoto Ingresso
Ingresso
C: Marcia
C: Operatività
C: Controllo locale
analogico 1
analogico 2
normale * (1)
O: Velocità
O: Blocco esterno
O: Stop
preimpostata 1
O: Controllo remoto Ingresso
C: Operatività
C: Marcia
C: Velocità
C: Controllo locale
analogico 1
normale
preimpostata 2
Velocità
O: Velocità
preimpostate O: Nessuna funzione
O: Stop (disabilitato) O: Controllo remoto Ingresso
preimpostata 1
C: Pulsante avviamento C: Marcia (abilitato) C: Controllo locale
analogico 1
C: Velocità
preimpostata 2
O: Velocità
O: Stop
O: Marcia in avanti O: Controllo remoto Ingresso
preimpostata 1
C: Marcia
C: Marcia indietro
C: Controllo locale
analogico 1
C: Velocità
preimpostata 2
O: Modalità
O: Velocità
O: Stop
“Incendio” *(1)
O: Controllo remoto Ingresso
preimpostata 1
C: Marcia
C: Operatività
C: Controllo locale
analogico 1
C: Velocità
normale * (1)
preimpostata 2
O: Operatività
normale
O: Stop
O: Controllo remoto Ingresso
Ingresso
C: Velocità
C: Marcia
C: Controllo locale
analogico 1
analogico 2
preimpostata 1 / PI
Set-point 2
Velocità di
O: Operatività
riferimento
normale
O: Blocco esterno
O: Stop
O: Controllo remoto Ingresso
selezionata su
C: Velocità
C: Operatività
C: Marcia
C: Controllo locale
analogico 1
tastierino
preimpostata 1 / PI
normale
Set-point 2
O: Nessuna funzione
O: Stop (disabilitato) O: Controllo remoto Ingresso
Ingresso
C: Pulsante avviamento C: Marcia (abilitato) C: Controllo locale
analogico 1
analogico 2
O: Stop
O: Marcia in avanti O Controllo remoto Ingresso
Ingresso
C: Marcia in avanti
C: Marcia indietro
C: Controllo locale
analogico 1
analogico 2
O: Modalità
O: Stop
“Incendio” *(1)
O: Controllo remoto Ingresso
Ingresso
C: Marcia in avanti
C: Operatività
C: Controllo locale
analogico 1
analogico 2
normale * (1)
Note
N/A
Con ingresso 3 chiuso:
Velocità di riferimento =
Ingresso analogico 2
Comando di avvio =
Ingresso 1
In modalità PI, l’ingresso
analogico 1 serve per
feedback
Con ingresso 3 chiuso:
Velocità di riferimento =
Velocità preimpostata 1
/2
Comando di avvio =
Ingresso 1
Con ingresso 3 chiuso:
Velocità di riferimento =
Selezione su tastierino
Comando di avvio =
Determinato da P2-37
Nota
*(1): La logica mostrata è da considerarsi impostazione di default. È possibile configurare la logica della Modalità Incendio attraverso il
parametro P8-09.
*(2): Impostazioni di default per P1-13 = 1
*(3): Quando l’azionamento è in modalità controllo PID (P1-12 = 3) ed è attiva la preselezione digitale di riferimento (P3-05 = 0), allora P1-13
può essere impostato a 1, 9, o 10 per permettere la selezione tra due riferimenti digitali indipendenti utilizzando l’ingresso digitale 2. Le
preselezioni digitali di riferimento 1 e 2 vengono impostate rispettivamente in P3-06 e in P3-15.
Nota: La connessione “Guasto del termistore del motore” avviene tramite l’ingresso analogico 2 ed è determinata dal parametro P2-33
(). L’ingresso del “Guasto esterno” non è più utilizzato per l’ingresso del termistore, diversamente da quanto avviene negli azionamenti
ODP ed E2.
36
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
11. Parametri estesi
11.1. Gruppo 2 – Parametri estesi
Par
P2-01
P2-02
P2-03
P2-04
P2-05
P2-06
P2-07
P2-08
P2-09
P2-10
P2-11
Nota:
Descrizione
Minimo
Massimo
Default
Unità di misura
Velocità preimpostata 1
-P1-01
P1-01
5
Hz / Rpm
La velocità preimpostata 1 viene regolata selezionando P1-13 con una opzione che permetta la selezione della logica, utilizzando le
impostazioni dei parametri di logica definiti dall’utente nel menù 9 (da P9-21 a P9-23), oppure attraverso le funzionalità PLC
dell’azionamento reperibili nella suite software Optitools Studio PC.
Velocità preimpostata 2
-P1-01
P1-01
10
Hz / Rpm
La velocità preimpostata 2 viene regolata selezionando P1-13 con una opzione che permetta la selezione della logica, utilizzando le
impostazioni dei parametri di logica definiti dall’utente nel menù 9 (da P9-21 a P9-23), oppure attraverso le funzionalità PLC
dell’azionamento reperibili nella suite software Optitools Studio PC.
Velocità preimpostata 3
-P1-01
P1-01
25
Hz / Rpm
La velocità preimpostata 3 viene regolata selezionando le impostazioni dei parametri di logica definiti dall’utente nel menù 9 (da P9-21
a P9-23), oppure attraverso le funzionalità PLC dell’azionamento reperibili nella suite software Optitools Studio PC.
Velocità preimpostata 4
-P1-01
P1-01
P1-01
Hz / Rpm
La velocità preimpostata 4 viene regolata selezionando le impostazioni dei parametri di logica definiti dall’utente nel menù 9 (da P9-21
a P9-23), oppure attraverso le funzionalità PLC dell’azionamento reperibili nella suite software Optitools Studio PC.
Velocità preimpostata 5 / Velocità di pulizia 1
-P1-01
P1-01
0
Hz / Rpm
La velocità preimpostata 5 è automaticamente impostata dalla Funzione pulizia quando questa è abilitata. Consultare la sezione 7.5,
Pulizia della pompa. Quando la pulizia è disabilitata, la velocità preimpostata 5 può essere selezionata per il modo operativo normale e
si determina attraverso le impostazioni dei parametri di logica definiti dall’utente nel menù 9 (da P9-21 a P9-23), oppure attraverso le
funzionalità PLC dell’azionamento reperibili nella suite software Optitools Studio PC.
Velocità preimpostata 6 / Velocità di pulizia 2
-P1-01
P1-01
0
Hz / Rpm
La velocità preimpostata 6 è automaticamente impostata dalla Funzione pulizia quando questa è abilitata. Consultare la sezione
sezione 7.5, Pulizia della pompa. Quando la pulizia è disabilitata, la velocità preimpostata 6 può essere selezionata per il modo
operativo normale e si configura attraverso le impostazioni dei parametri di logica definiti dall’utente nel menù 9 (da P9-21 a P9-23),
oppure attraverso le funzionalità PLC dell’azionamento reperibili nella suite software Optitools Studio PC.
Velocità preimpostata 7 / Velocità di boost / Funzione
-P1-01
P1-01
0
Hz / Rpm
anti-deposito
La velocità preimpostata 7 fa automaticamente riferimento al boost all’avvio / arresto, oppure alla funzione anti-deposito, quando
queste sono abilitate. Consultare la sezione 7.6, Funzione anti-deposito e la sezione 8, Applicazioni del controllo PID. Quando le
funzioni HVAC sono disabilitate, la velocità preimpostata 7 può essere selezionata per la modalità di operatività normale e si configura
attraverso le impostazioni dei parametri di logica definiti dall’utente nel menù 9 (da P9-21 a P9-23), oppure attraverso le funzionalità
PLC dell’azionamento reperibili nella suite software Optitools Studio PC.
Velocità preimpostata 8 / Velocità di boost 2
-P1-01
P1-01
0
Hz / Rpm
La velocità preimpostata 7 fa automaticamente riferimento al boost all’avvio / arresto, quando questo è abilitato. Consultare la
sezione 8, Applicazioni del controllo PID. Quando la funzione Boost è disabilitata, la velocità preimpostata 8 può essere selezionata per
la modalità di operatività normale e si configura attraverso le impostazioni dei parametri di logica definiti dall’utente nel menù 9 (da
P9-21 a P9-23), oppure attraverso le funzionalità PLC dell’azionamento reperibili nella suite software Optitools Studio PC.
Centro salto di frequenza
P1-02
P1-01
0
Hz / Rpm
Individua il centro del salto di frequenza, che è così definita:
Limite inferiore = P2-09 - P2-10/2 Limite superiore = P2-09 + P2-10/2
Tutte le larghezze salto di frequenza definite per velocità di Marcia in Avanti vengono replicate per le corrispettive velocità negative.
Larghezza salto di frequenza
0
P1-01
0
Units
Individua la larghezza del salto di frequenza, che è così definita:
Limite inferiore = P2-09 - P2-10/2 Limite superiore = P2-09 + P2-10/2
Tutte le larghezze salto di frequenza definite per velocità di Marcia in Avanti vengono replicate per le corrispettive velocità negative.
Funzione uscita analogica 1 (morsetto 8)
0
11
8
Modalità uscita digitale. Logica 1 = +24 V CC
0 : Azionamento abilitato (in funzione). Logica 1 quando l'Optidrive è abilitato (in funzione).
1: Azionamento senza errori. Logica 1 quando non sussiste alcun errore / guasto.
2 : Frequenza di riferimento (velocità). Logica 1 quando la frequenza di uscita corrisponde al valore della frequenza di riferimento.
3 : Frequenza di uscita > 0.0 Hz. Logica 1 quando il motore funziona a velocità > 0 Hz.
4 : Frequenza di uscita >= Limite. Logica 1 quando la velocità del motore supera il limite regolabile.
5 : Corrente in uscita >= Limite. Logica 1 quando la corrente del motore supera il limite regolabile.
6 : Parametro riservato. Nessuna funzione.
7 : Segnale in ingresso analogico 2 >= Limite. Logica 1 quando il segnale applicato all'ingresso analogico 2 supera il limite modificabile.
Modalità uscita analogica (impostazione in P2-12)
8 : Frequenza di uscita (velocità del motore). Da 0 a P1-01
9 : Corrente in uscita (motore). Da 0 a 200% di P1-08
10 : Parametro riservato. Nessuna funzione
11 : Potenza in uscita (motore). Da 0 a 150 % della potenza nominale motore
Quando si utilizzano le impostazioni 4 – 7, i parametri P2-16 e P2-17 controllano il comportamento in uscita. L’uscita passerà a Logica 1
quando il segnale selezionato oltrepasserà il valore impostato in P2-16, e ritornerà a Logica 0 quando il segnale scenderà sotto il valore
impostato in P2-17.
www.invertek.co.uk
37
P2-12
P2-13
Nota:
P2-14
P2-15
Nota:
P2-16
P2-17
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Formato uscita analogica 1 (morsetto 8)
-
= da 0 a 10 V
= da 10 a 0 V
= da 0 a 20 mA
= da 20 a 0 mA
= da 4 a 20 mA
= da 20 a 4 mA
Funzione uscita analogica 2 (morsetto 11)
0
11
9
Modalità uscita digitale. Logica 1 = +24 V CC
0 : Azionamento abilitato (in funzione). Logica 1 quando l'Optidrive è abilitato (in funzione).
1: Azionamento senza errori. Logica 1 quando non sussiste alcun errore / guasto.
2 : Frequenza di riferimento (velocità). Logica 1 quando la frequenza di uscita corrisponde al valore della frequenza di riferimento.
3 : Frequenza di uscita > 0.0 Hz. Logica 1 quando il motore funziona a velocità superiore a 0 Hz.
4 : Frequenza di uscita >= Limite. Logica 1 quando la velocità del motore supera il limite regolabile.
5 : Corrente in uscita >= Limite. Logica 1 quando la corrente del motore supera il limite regolabile.
6 : Parametro riservato. Nessuna funzione.
7 : Segnale in ingresso analogico 2 >= Limite. Logica 1 quando il segnale applicato all'ingresso analogico 2 supera il limite modificabile.
Modalità uscita analogica (impostazione in P2-14)
8 : Frequenza di uscita (velocità del motore). Da 0 a P1-01
9 : Corrente in uscita (motore). Da 0 a 200% di P1-08
10 : Parametro riservato. Nessuna funzione.
11 : Potenza in uscita (motore). Da 0 a 150 % della potenza nominale motore
Quando si utilizzano le impostazioni 4 – 7, i parametri P2-19 e P2-20 controllano il comportamento in uscita. L’uscita passerà a Logica 1
quando il segnale selezionato oltrepasserà il valore impostato in P2-19, e ritornerà a Logica 0 quando il segnale scenderà sotto il valore
impostato in P2-20.
Formato uscita analogica 2 (morsetto 11)
= da 0 a 10 V
= da 10 a 0 V
= da 0 a 20 mA
= da 20 a 0 mA
= da 4 a 20 mA
= da 20 a 4 mA
Funzione relè di uscita 1 (morsetti 14, 15 e 16)
0
7
1
Seleziona la funzione assegnata al relè di uscita 1. Il relè presenta contatti normalmente aperti e normalmente chiusi. Logica 1 indica
che il relè è attivo, pertanto il contatto normalmente aperto è chiuso (i morsetti 14 e 15 saranno collegati) e il contatto normalmente
chiuso è aperto (i morsetti 14 e 16 non saranno più collegati).
0 : Azionamento abilitato (in funzione). Logica 1 quando l'Optidrive è abilitato (in funzione).
1: Azionamento senza errori. Logica 1 quando non sussiste alcun errore / guasto.
2 : Frequenza di riferimento (velocità). Logica 1 quando la frequenza di uscita corrisponde al valore della frequenza di riferimento.
3 : Frequenza di uscita > 0.0 Hz. Logica 1 quando il motore funziona a velocità superiore a 0 Hz.
4 : Frequenza di uscita >= Limite. Logica 1 quando la velocità del motore supera il limite regolabile.
5 : Corrente in uscita >= Limite. Logica 1 quando la corrente del motore supera il limite regolabile.
6 : Parametro riservato. Nessuna funzione.
7 : Segnale in ingresso analogico 2 >= Limite. Logica 1 quando il segnale applicato all'ingresso analogico 2 supera il limite modificabile
8 : Parametro riservato. Nessuna funzione.
9 : Modalità incendio attiva. Logica 1 quando l’azionamento opera in Modalità incendio (ingresso Modalità incendio attivo).
10 : Manutenzione necessaria. Logica 1 quando il timer della Manutenzione esaurisce il suo ciclo indicando la necessità di effettuare la
Manutenzione.
11 : Azionamento disponibile. Logica 1 quando l’azionamento opera in Modalità automatica, non sono presenti guasti / errori e il
circuito di sicurezza è abilitato indicando che l’azionamento è pronto per il controllo in modalità automatica.
Quando si utilizzano le impostazioni 4 – 7, i parametri P2-16 e P2-17 controllano il comportamento in uscita. L’uscita passerà a Logica 1
quando il segnale selezionato oltrepasserà il valore impostato in P2-16, e ritornerà a Logica 0 quando il segnale scenderà sotto il valore
impostato in P2-17.
Limite superiore relè 1 (uscita analogica 1 / relè di
P2-17
200
100
%
uscita 1)
Imposta il valore del limite superiore per P2-11 e P2-15, fare riferimento a P2-11 o P2-15
Limite inferiore relè 1 (uscita analogica 1 / relè di uscita
0
P2-16
0
%
1)
Imposta il valore del limite inferiore per P2-11 e P2-15, fare riferimento a P2-11 o P2-15.
38
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
P2-18
P2-19
Funzione relè di uscita 2 (morsetti 17 e 18)
0
8
0
Seleziona la funzione assegnata al relè di uscita 2. Il relè presenta due morsetti di uscita, Logica 1 indica che il relè è attivo, pertanto i
morsetti 17 e 18 saranno collegati.
0 : Azionamento abilitato (in funzione). Logica 1 quando l'Optidrive è abilitato (in funzione).
1: Azionamento senza errori. Logica 1 quando non sussiste alcun errore / guasto.
2 : Frequenza di riferimento (velocità). Logica 1 quando la frequenza di uscita corrisponde al valore della frequenza di riferimento.
3 : Frequenza di uscita > 0.0 Hz. Logica 1 quando il motore funziona a velocità superiore a 0 Hz.
4 : Frequenza di uscita >= Limite. Logica 1 quando la velocità del motore supera il limite regolabile.
5 : Corrente in uscita >= Limite. Logica 1 quando la corrente del motore supera il limite regolabile
6 : Parametro riservato. Nessuna funzione.
7 : Ingresso analogico 2 >= Limite. Logica 1 quando il segnale applicato all'ingresso analogico 2 supera il limite regolabile.
8 : Controllo pompa ausiliaria 1 (slave 1) . Consultare la sezione 7.1, Funzione multipompe – controllo di pompe ausiliarie a velocità
fissa alimentate direttamente dalla rete elettrica.
9 : Modalità incendio attiva. Logica 1 quando l’azionamento opera in Modalità incendio (Ingresso Modalità incendio attivo).
10 : Manutenzione. Logica 1 quando il timer della Manutenzione esaurisce il suo ciclo indicando la necessità di effettuare la
Manutenzione.
11 : Azionamento disponibile. Logica 1 quando l’azionamento opera in Modalità automatica, non sono presenti guasti / errori e il
circuito di sicurezza è abilitato indicando che l’azionamento è pronto per il controllo in modalità automatica.
Quando si utilizzano le impostazioni 4 – 7, i parametri P2-19 e P2-20 controllano il comportamento in uscita. L’uscita passerà a Logica
1 quando il segnale selezionato oltrepasserà il valore impostato in P2-19, e ritornerà a Logica 0 quando il segnale scenderà sotto il
valore impostato in P2-20.
Limite superiore relè 2 (uscita analogica 2 / relè di uscita 2)
P2-20
200
100
%
P2-20
Imposta il valore del limite superiore per P2-13 e P2-18, fare riferimento a P2-13 o P2-18.
Limite inferiore relè 2 (uscita analogica 2 / relè di uscita 2)
0
P2-19
Nota:
P2-21
P2-22
Nota:
P2-23
P2-24
P2-25
P2-26
P2-27
0
%
Imposta il valore del limite inferiore per P2-13 e P2-18, fare riferimento a P2-13 o P2-18.
Scalatura display
-30
30
0
Determina il fattore di scala del display.
La variabile selezionata in P2-22 viene moltiplicata per il fattore immesso in P2-21.
Sorgente scala display
0
2
0
Tipo di segnale usato come sorgente usato quando sul display dell’azionamento vengono visualizzate le unità personalizzate.
0: Velocità del motore
1: Corrente del motore
2: Ingresso analogico 2
P2-21 e P2-22 permettono di programmare l’Optidrive per visualizzare sul display un’unità di uscita alternativa tramite un fattore di
scala basato su un parametro esistente (per esempio la visualizzazione della velocità di un trasportatore in metri al secondo basata
sulla frequenza di uscita).
Questa funzione viene disabilitata quando P2-21 è impostato al valore di 0. Se P2-21 è >0, la variabile selezionata in P2-22 viene
moltiplicata per il fattore immesso in P2-21, e viene visualizzata mentre l'azionamento è in funzione.
Tempo mantenimento velocità zero
0
60
0,2
Secondi
Determina il tempo per cui la frequenza di uscita dell'azionamento è mantenuta a 0 all'arresto, prima che l'azionamento venga
disabilitato.
[Dipende
[Dipende
Frequenza di switching reale
4 kHz
Default
dall’azionamento]
dall’azionamento]
Effettiva frequenza di commutazione (switching) dello stadio di potenza. Frequenze più alte riducono il "ronzio" udibile provocato dal
motore e migliorano la forma d'onda della corrente in uscita, a discapito del rendimento dell'azionamento.
Nota: Potrebbe essere necessario diminuire la corrente di uscita dell’azionamento quando P2-24 viene portato oltre il valore di
impostazione minimo.
Tempo rampa decelerazione rapida
0
30
0
Secondi
Questo parametro consente di programmare una seconda rampa di decelerazione alternativa a quella principale.
La rampa di decelerazione rapida viene automaticamente selezionata in caso di interruzione dell’alimentazione se P2-38 = 2.
Quando è impostato a 0 in P2-25, l'azionamento rallenterà spontaneamente per inerzia fino ad arrestarsi.
La rampa di decelerazione rapida può venire selezionata anche usando i parametri di configurazione logica definiti dall’utente nel
menù 9 (P9-02), oppure attraverso le funzionalità PLC dell’azionamento reperibili nella suite software Optitools Studio PC.
Abilitazione Spin Start
0
1
1
0 : Disabilitata.
1 : Abilitata. Se abilitata, all'accensione l'azionamento tenterà di determinare se il motore stia già girando e di stabilire la velocità e
direzione di rotazione. L’azionamento controllerà il motore a partire dalla velocità attuale rilevata. Potrebbe verificarsi un piccolo
ritardo nell'accensione del motore durante il completamento della funzione spin start.
Tempo intervento modalità standby
0
250
0
Secondi
Questo parametro indica un intervallo di tempo; se l'azionamento funziona a velocità minima per almeno la durata dell'intervallo di
tempo impostato, l'uscita dell'Optidrive verrà disabilitata, e il display mostrerà la dicitura . La funzione viene disabilitata se P227 = 0.
www.invertek.co.uk
39
P2-28
P2-29
P2-30
P2-31
P2-32
P2-33
P2-34
P2-35
P2-36
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Scalatura velocità Slave
0
3
0
Attivo solo in modalità di controllo da tastierino (P1-12 = 1 o 2) e in modalità Slave (P1-12 = 4). Il riferimento del tastierino può essere
moltiplicato da un fattore di scala preimpostato o modificato attraverso un fattore moltiplicativo o un offset analogico.
0 : Disabilitato. Non viene applicato alcun offset o cambio di scala.
1 : Velocità effettiva = Velocità digitale x P2-29
2 : Velocità effettiva = (Velocità digitale x P2-29) + Ingresso di riferimento analogico 1
3 : Velocità effettiva = (Velocità digitale x P2-29) x Ingresso di riferimento analogico 1
Scalatura velocità digitale
-500
500
%
100
Fattore scala velocità slave usato in combinazione con P2-28.
Formato ingresso analogico 1 (morsetto 6)
= segnale da 0 a 10 V (unipolare)
= segnale da 10 a 0 V (unipolare)
= segnale da -10 a +10 V (bipolare)
= segnale da 0 a 20 mA
= segnale da 4 a 20 mA, l'Optidrive si blocca e mostrerà il codice errore se il segnale scende sotto 3 mA
= segnale da 4 a 20 mA, l'Optidrive decelera fino alla velocità preimpostata 4 se il segnale scende sotto 3mA
= segnale da 20 a 4 mA, l'Optidrive si blocca e mostrerà il codice errore se il segnale scende sotto 3 mA
= segnale da 20 a 4 mA, l'Optidrive decelera fino alla velocità preimpostata 4 se il segnale scende sotto 3mA
Scala ingresso analogico 1
0
500
100
%
P2-31 viene usato per scalare l’ingresso analogico prima che questo sia utilizzato come riferimento. Per esempio, se P2-30 è impostato
per 0 – 10 V, e il fattore di scala è impostato al 200%, ci sarà un ingresso da 5 V che farà funzionare l'azionamento a massima velocità
(P1-01).
Offset ingresso analogico 1
-500
500
0
%
P2-32 definisce l’offset per l’ingresso analogico come percentuale della scala totale dell’ingresso. Un offset positivo viene sottratto dal
segnale analogico in ingresso e un offset negative viene addizionato al segnale. Per esempio, se P2-30 è impostato per 0 – 10 V, e
l’offset analogico è impostato al 10%, allora verrà sottratto 1 V (10% di 10 V) dal riferimento analogico in ingresso prima di venire
applicato.
Formato ingresso analogico 2 (morsetto 10)
= segnale da 0 a 10 V (unipolare)
= segnale da 10 a 0 V (unipolare)
= termistore PTC sul motore
= segnale da 0 a 20 mA
= segnale da 4 a 20 mA, l'Optidrive si blocca e mostrerà il codice errore se il segnale scende sotto 3 mA
= segnale da 4 a 20 mA, l'Optidrive decelera fino alla velocità preimpostata 4 se il segnale scende sotto 3mA
= segnale da 20 a 4 mA, l'Optidrive si blocca e mostrerà il codice errore se il segnale scende sotto 3 mA
= segnale da 20 a 4 mA, l'Optidrive decelera fino alla velocità preimpostata 4 se il segnale scende sotto 3mA
Scala ingresso analogico 2
0
500
100
%
P2-34 viene usato per scalare l’ingresso analogico prima che venga utilizzato come riferimento dell’azionamento. Per esempio, se P234 è impostato per 0 – 10 V, e il fattore di scala è impostato al 200%, ci sarà un ingresso da 5 V che farà funzionare l'azionamento a
massima velocità (P1-01).
Offset ingresso analogico 2
-500
500
0
%
P2-35 definisce l’offset per l’ingresso analogico come percentuale della scala totale dell’ingresso. Un offset positivo viene sottratto dal
segnale analogico in ingresso e un offset negative viene addizionato al segnale. Per esempio, se P2-33 è impostato per 0 – 10 V, e
l’offset analogico è impostato al 10%, allora verrà sottratto 1 V (10% di 10 V) dal riferimento analogico in ingresso prima di venire
applicato.
Modalità di start / Restart automatico
Definisce il comportamento dell'azionamento in relazione al segnale di abilitazione in ingresso e configura la funzione di Riavvio
automatico.
: A seguito dell'accensione dell'alimentazione o al riavvio, l'azionamento non si avvierà se l'ingresso digitale 1 rimane chiuso.
L'ingresso deve essere chiuso dopo l'accensione dell'alimentazione o il riavvio dell'azionamento.
: A seguito dell'accensione dell'alimentazione o al riavvio, l'azionamento si avvierà automaticamente se l'ingresso digitale 1 è
chiuso.
Da a : A seguito di un blocco, l'azionamento eseguirà 5 tentativi per riavviarsi, uno ogni 20 secondi. L'azionamento
deve essere disalimentato per riavviare il contatore. Il numero di tentativi di riavvio è limitato, e se l'azionamento non riesce a
riavviarsi all'ultimo tentativo, il dispositivo entrerà in condizione di guasto, e l'utente dovrà eliminare la condizione di guasto
manualmente.
40
www.invertek.co.uk
P2-37
P2-38
P2-39
P2-40
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Restart con tastierino
0
7
2
Le opzioni da 0 a 3 sono attive solo quando P1-12 = 1 o 2 (modalità tastierino).
0 : Velocità minima. A seguito di un arresto e riavvio, l'azionamento ritornerà alla velocità minima iniziale P1-02.
1 : Velocità operativa precedente. A seguito di un arresto e riavvio, l'azionamento ritornerà all'ultima velocità operativa impostata sul
tastierino prima dell'arresto.
2 : Velocità attuale. Configurato per velocità di riferimento multiple (solitamente controllo manuale / automatico oppure controllo
locale / remoto); quando l'Optidrive passa in modalità tastierino attraverso un segnale in ingresso digitale, l'azionamento continuerà a
funzionare all'ultima velocità operativa rilevata.
3 : Velocità preimpostata 4. A seguito di un arresto e riavvio, l'Optidrive si avvierà sempre alla velocità preimpostata 4 (P2-04)
Le opzioni da 4 a 7 sono attive in tutte le modalità di controllo. L’avvio dell’azionamento in queste modalità è controllato
dall’abilitazione dell’ingresso digitale nella morsettiera di controllo.
4 : Velocità minima (abilitazione da morsetto). A seguito di un arresto e riavvio, l'azionamento si avvierà sempre alla velocità minima
P1-02.
5 : Velocità operativa precedente (abilitazione da morsetto). A seguito di un arresto e riavvio, l'azionamento ritornerà all'ultima
velocità impostata sul tastierino prima dell'arresto.
6 : Velocità attuale (abilitazione da morsetto). Configurato per velocità di riferimento multiple (solitamente controllo manuale /
automatico oppure controllo locale / remoto), quando l'Optidrive passa in modalità tastierino tramite un segnale in ingresso digitale,
l'azionamento continuerà a funzionare all'ultima velocità operativa.
7 : Velocità preimpostata 8 (abilitazione da morsetto). A seguito di un arresto e riavvio, l'Optidrive si avvierà sempre alla velocità
preimpostata 4 (P2-04).
Arresto per mancanza rete / Controllo arresto
0
2
0
Controlla il comportamento del dispositivo in risposta a una perdita di alimentazione mentre l'azionamento era abilitato.
0: Alimentazione dal carico. L'Optidrive tenterà di restare in funzione prendendo energia dal carico del motore. Se il periodo di
assenza di alimentazione è limitato, e si può recuperare sufficiente energia prima che i controlli elettronici dell'azionamento si
spengano, l'azionamento si riavvierà automaticamente al ripristino dell'alimentazione principale.
1: Rallentamento fino all'arresto. L'Optidrive disabiliterà immediatamente il segnale di uscita al motore, permettendo così al carico di
rallentare spontaneamente per inerzia (freewheel). Quando si utilizza questa impostazione con elevati carichi di inerzia, potrebbe
venire richiesta l'abilitazione della funzione spin start (P2-26)
2: Decelerazione rapida. L'azionamento decelererà fino ad arrestarsi al valore programmato nell'intervallo di tempo definito nella
seconda rampa di decelerazione P2-25
Blocco parametri
0
1
0
0 : Sblocco. Tutti i parametri possono essere modificati
1 : Blocco. I parametri possono essere visualizzati ma non modificati
Accesso al menù esteso
0
9999
101
Individua il codice per l'accesso da inserire in P1-14 per accedere ai Gruppi di parametri successivi al gruppo 1
www.invertek.co.uk
41
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
11.2. Gruppo 3 – Controllo retroazione (controllo PID)
Par
Descrizione
P3-01
P3-02
P3-03
P3-04
P3-05
P3-06
P3-07
P3-08
P3-09
P3-10
P3-11
P3-12
P3-13
P3-14
P3-15
Unità di
misura
Guadagno proporzionale PID
0,1
30
1
Guadagno proporzionale PID. L’errore immediato tra il segnale di retroazione e valore di riferimento (set point) del controllo PID
viene moltiplicato in P3-01 per produrre l’uscita del controllo PID. Valori più alti comportano un maggiore variazione della frequenza
di uscita dell'azionamento in risposta a piccole variazioni nel segnale di retroazione. Valori troppo elevati possono causare instabilità.
Costante tempo integrale PID
0
30
1
Secondi
Costante di tempo integrale PID. Errore accumulato nel controllo PID. Utilizza gli errori accumulati tra il segnale di retroazione e
valore di riferimento (set point) per influenzare l’uscita del controllo PID. P3-02 rappresenta la costante di tempo per l’accumulo degli
errori. Valori più alti comportano una risposta più smorzata del sistema. Valori più bassi comportano una risposta più rapida del
sistema, ma possono causare instabilità.
Costante tempo differenziale PID
0
1
0
Secondi
Costante di tempo differenziale PID. La costante di tempo differenziale fa riferimento alla velocità di variazione del segnale di
retroazione nel tempo e serve a rallentare il valore del cambiamento del controllo PID, in particolare quando si avvicina al valore di
riferimento (setpoint). Impostando un tempo minore si diminuirà il superamento dei valori limite, si ma rallenterà il tempo di risposta
del sistema e si potrebbe causare instabilità. Nota: P3-03 è impostata per default a 0, disabilitando così la costante di tempo
differenziale. Prestare attenzione quando si imposta questo valore diversamente dall’impostazione di default.
Modo operativo PID
0
1
0
0 : diretto. Usare questa modalità se una diminuzione del segnale di retroazione provoca un aumento della velocità del motore.
1 : inverso. Usare questa modalità se un aumento del segnale di retroazione provoca un aumento della velocità del motore.
Selezione riferimento PID (setpoint)
0
2
0
Selezionare la sorgente per il segnale di controllo PID di riferimento (setpoint)
0 : Riferimento digitale usando P3-06
1 : Ingresso analogico 1
2 : Ingresso analogico 2
Valore riferimento digitale PID (setpoint)
0
100
0
%
Quando P3-05 = 0, questo parametro imposta il riferimento digitale usato per il controllo PID
Limite d'uscita alto PID
P3-08
100.0
100
%
Limita il valore massimo in uscita del controllore PID
Limite d'uscita basso PID
0
P3-07
0
%
Limite il valore minimo in uscita del controllore PID
Controllo limite uscita PID
0
3
0
0 : Limiti d'uscita digitali. La gamma di valori d’uscita del controllore PID è limitata dai valori dei parametri P3-07 e P3-08
1 : Ingresso analogico 1 impone un limite alto variabile. La gamma di valori d’uscita del controllore PID è limitata dai valori dei
parametri P3-08 e dal segnale applicato all'ingresso digitale 1
2: Ingresso analogico 1 impone un limite basso variabile. La gamma di valori d’uscita del controllore PID è limitata dai valori applicati
all'ingresso digitale 1 e al parametro di P3-07
3: Uscita PID + ingresso analogico 1. Il valore dell'uscita dal controllo PID viene sommato al segnale della velocità di riferimento
applicato all'ingresso analogico 1
Selezione segnale retroazione PID
0
1
0
Individua la sorgente del segnale di feedback PID (sensore segnale feedback)
0 : Ingresso analogico 2
1 : Ingresso analogico 1
Errore PID per abilitazione rampa
0
25
0
%
Individua un massimo errore PID, per cui se la differenza tra il valore impostato e il valore di retroazione è minore del limite
impostato, i tempi di rampa interna dell'azionamento vengono disabilitati per permettere all’azionamento di rispondere rapidamente
a piccoli errori. In caso venga riscontrato un errore PID più grande, i tempi di rampa sono abilitati per limitare il cambiamento della
velocità del motore.
Un valore pari a 0 significa che le rampe dell'azionamento sono sempre abilitate. Questo parametro permette all'utente di disabilitare
le rampe interne dell'azionamento ove occorra una reazione immediata al controllo PID. Disabilitando le rampe solamente a fronte di
un piccolo errore PID, si riduce il rischio di sovratensione e sovracorrente.
Scalatura valore di retroazione PID
0
50
0
Applica un fattore di scala al valore di retroazione mostrato sul display, permettendo all'utente di visualizzare i segnali nella scala del
trasduttore, ad esempio 0 – 10 Bar ecc.
Livello di retroazione per wake up PID
0
100
0
%
Impostazione programmabile, per cui se l'azionamento va in stand-by mentre si trova in controllo PID, il segnale di retroazione
selezionato deve scendere al di sotto di questo limite prima che l'azionamento ritorni al funzionamento normale.
Livello velocità standby
0
P1-01
0
Hz / Rpm
Determina il punto in cui l’azionamento entrerà in modalità standby. Per attivarlo, impostare P2-27 con un valore di tempo per la
funzione standby. L’azionamento entra in modalità standby se la velocità del motore rimane sotto il valore impostato in P3-14 per
l’intervallo di tempo impostato in P2-27.
Valore 2° riferimento PID
0
100
0
%
Quando P3-05 = 0, e il 2° valore digitale di riferimento viene selezionato (consultare la sezione 10.1 – Configurazione ingressi digitali),
questo parametro individua il valore digitale di riferimento preimpostato (setpoint) del controllo PID.
42
Minimo
www.invertek.co.uk
Massimo
Default
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
11.3. Gruppo 4 – Controllo motore ad alte prestazioni
Par
P4-02
L'impostazione errata dei parametri del Gruppo 4 potrebbe causare azioni impreviste da parte del motore e dei dispositivi
collegati. Si raccomanda la regolazione di tali parametri solamente a personale qualificato ed esperto.
Descrizione
Minimo
Massimo
Default
Unità di
misura
Abilitazione Auto-tune motore
0
1
0
Quando impostato su 1 l'azionamento esegue immediatamente una misura statica dei parametri del motore (senza rotazione)
acquisendoli per ottimizzare l’algoritmo di controllo. Al termine della procedura Auto-tune, il parametro ritorna automaticamente a 0.
11.4. Gruppo 5 – Parametri di comunicazione
Par
Descrizione
P5-01
Indirizzo comunicazione bus di campo
0
63
Impostazione dell'indirizzo fieldbus dell'Optidrive.
Velocità Modbus RTU / BACnet
9,6
115,2
115,2
Kbps
Impostazione della velocità di simbolo (baud rate) quando si utilizzano i protocolli di comunicazione Modbus/BACnet
9,6 kbps, 19,2 kpbs, 38,4 kpbs, 57,6 kpbs, 115 kbps
Formato dati Modbus / BACnet
Imposta il telegramma Modbus o BACnet nelle seguenti modalità:
: Nessun bit di parità, 1 bit di stop
: Nessun bit di parità, 2 bit di stop
: Parità Odd, 1 bit di stop
: Parità Even, 1 bit di stop
Tempo massimo perdita di comunicazione
0
5
1
Secondi
Imposta l’intervallo di vigilanza per i canali di comunicazione. Se l'Optidrive non riceve un telegramma valido in questo intervallo di
tempo, l'azionamento registrerà una perdita di comunicazione e si comporterà come indicato sotto (P5-06).
Azione dopo perdita comunicazione
0
3
0
Controlla il comportamento dell'azionamento in seguito ad una perdita di comunicazione come indicato sopra (P5-05).
0: Blocco e decelerazione spontanea fino all'arresto
1: Decelerazione fino all'arresto e poi blocco
2: Decelerazione fino all'arresto (senza blocco)
3: In funzione alla velocità preimpostata 4
Controllo rampe con bus di campo
0
1
0
Seleziona il controllo diretto dell'accelerazione e della decelerazione tramite il fieldbus, o tramite i parametri interni dell'azionamento
P1-03 e P1-04.
0 : Disabilitato. Le rampe vengono controllate dai parametri interni dell'azionamento
1 : Abilitato. Le rampe vengono controllare direttamente dal fieldbus
Numero identificativo BACnet (bit bassi)
0
65535
1
Identificativo unico del dispositivo (device instance number) all’interno della rete BACnet network. Combinato con P5-10, il valore
immesso deve rappresentare un valore unico nella rete BACnet. P5-09 rappresenta i 16 bit meno significativi del numero
identificativo, che in totale è composto da 22 bit.
Numero identificativo BACnet (bit alti)
0
63
0
Identificativo unico del dispositivo (device instance number) all’interno della rete BACnet network. Combinato con P5-09 il valore
immesso deve rappresentare un valore unico nella rete BACnet. P5-10 reppresenta rappresenta i 6 bit più significativi del numero
identificativo, che in totale è composto da 22 bit.
Numero Massimo di Master BACnet
0
127
127
Definisce il numero massimo di indirizzi master BACnet disponibili nella rete locale MSTP BACnet. Quando il dispositivo interrogherà il
master successivo in rete, non farà richiesta per il valore impostato in P5-11. Per esempio, se il valore immesso è 50, quando
l’azionamento terminerà la comunicazione e dovrà passare a controllare il master successivo interrogherà fino a 50 indirizzi prima di
ritornare all’indirizzo 0.
P5-03
P5-04
P5-05
P5-06
P5-07
P5-09
P5-10
P5-11
Minimo
www.invertek.co.uk
Massimo
Default
Unità di
misura
1
43
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
11.5. Gruppo 6 – Configurazione impostazioni avanzate
Par
Descrizione
P6-01
P6-02
P6-03
P6-04
P6-05
P6-10
P6-11
P6-12
P6-18
P6-22
P6-23
P6-24
P6-25
P6-26
P6-27
P6-28
P6-29
P6-30
Unità di
misura
Abilitazione aggiornamento firmware
0
1
0
Consente l’aggiornamento del firmware. Fare riferimento al Manuale d’uso avanzato prima di eseguire qualunque aggiornamento.
Gestione automatica temperatura
4
16
4
kHz
L’azionamento ridurrà automaticamente la frequenza di switching in uscita di fronte a temperature elevate del dissipatore, così da
ridurre il rischio di guasto dovuto a surriscaldamento. Il valore minimo della frequenza di switching in uscita viene individuato dal
limite impostato in P6-02.
Tempo ritardo auto-reset
1
60
20
Secondi
Imposta il tempo di attesa tra tentativi consecutivi di riavvio dell’azionamento quando il riavvio automatico è stato abilitato in P2-36.
Isteresi relè velocità
0
1
0
Questo parametro agisce in combinazione con P2-11 e P2-13 = 2 o 3 per impostare una banda di valori intorno alla velocità di
riferimento (P2-11 = 2) o alla velocità zero (P2-11 = 3). Quando la velocità si trova entro questa banda, l’azionamento si considera alla
velocità di riferimento o a velocità zero. Questa funzione si usa per prevenire lo scatto continuo del relè di uscita se la velocità
durante il funzionamento coincide con il punto in cui il relè digitale / di uscita cambia stato. Ad esempio, se P2-13 = 3, P1-01 = 50 Hz e
P6-04 = 5%, i contatti del relè si chiudono oltre 2,5 Hz.
Selezione caratteristica V/F
0
1
0
Scelta dei parametri V/F utilizzati per controllare il motore.
P6-05 = 0 seleziona una caratteristica quadratica, P6-05 =1 una caratteristica lineare.
Abilitazione funzione PLC
0
1
0
Questo parametro abilita la funzione PLC e va impostato a 1 prima di far partire qualunque programma PLC caricato
nell’azionamento. Quando impostato a 0, il programma PLC sarà disabilitato.
0: disabilitato
1: abilitato
Ritardo all’abilitazione
0
250
0
Secondi
Definisce l’intervallo di tempo in cui l’azionamento opera alla velocità preimpostata 7 (P2-07) in seguito all’abilitazione del segnale di
abilitazione. Questo parametro è utile per pompe che necessitano di rotazione inversa all’avvio, per liberarsi di potenziali blocchi.
Ritardo alla disabilitazione
0
250
0
Secondi
Definisce l’intervallo di tempo in cui l’azionamento opera alla velocità preimpostata 8 (P2-08) in seguito alla rimozione del segnale di
abilitazione, prima di decelerare ed arrestarsi. Questo parametro è utile per pompe sotterranee volumetriche per consentire il
rallentamento dell’albero all’arresto.
Iniezione tensione DC in frenatura
0
25
0
%
Imposta il livello di tensione continua come percentuale della tensione nominale (P1-07) che viene applicata al motore alla ricezione
di un comando di arresto.
Reset tempo funzionamento ventole
0
1
0
Quando impostato al valore 1, ripristina il contatore della ventola di raffreddamento (come mostrato in P0-35).
Reset misuratore kWh
0
1
0
Quando impostato al valore 1, ripristina il contatore interno kWh (come mostrato in P0-26 e P0-27)
Tempo intervallo manutenzioni
0
60000
5000
Ore
Mostra quanto tempo rimane prima della manutenzione prevista. Vengono indicate sul display OLED le ore totali di funzionamento
mancanti alla prossima manutenzione. Quando P6-25=1, il contatore tempo intervallo manutenzione viene impostato su questo
valore.
Reset tempo intervallo manutenzioni
0
1
0
Quando impostato al valore 1, il contatore manutenzione è impostato al valore definito in P6-24.
Scalatura uscita analogica 1
0
500
100
%
Definisce il fattore di scala come percentuale usata per l’uscita analogica 1.
Offset uscita analogica 1
-500
500
0
%
Definisce l’offset come percentuale usata per l’uscita analogica 1.
Indice P0-80
0
127
0
Questo parametro definisce la lista delle variabili interne, i cui valori si possono visualizzare in P0-80.
Viene solitamente usato in combinazione con le funzionalità PLC.
Salva i parametri di base
0
1
0
Impostando questo parametro a 1, si memorizzano le impostazioni correnti dei parametri come “Parametri di default utente”.
Quando l’utente esegue il comando premendo i tasti UP, DOWN e STOP, il parametro salvato all’ultima impostazione di P6-29=1 verrà
ripristinato.
Codice di accesso livello 3
1
9999
201
Individua il codice di accesso che deve essere inserito in P1-14 per permettere l’accesso ai parametri avanzati dei gruppi da 6 a 9 (il
menu del gruppo 8 è accessibile tramite livello di sicurezza 2).
44
Minimo
www.invertek.co.uk
Massimo
Default
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
11.6. Gruppo 7 – Parametri riservati (non disponibili)
I parametri del gruppo 7 non vengono utilizzati dall’HVAC e non influenzano alcuna funzione nella configurazione e nel set-up
dell’azionamento.
11.7. Gruppo 8 – Funzioni specifiche HVAC
Par
Descrizione
P8-01
Intervallo anti-deposito
0
60000
0
Indica il periodo di inattività (azionamento in modalità standby) cui seguirà l’avvio della funzione anti-deposito.
Durata funzione anti-deposito
1
6000
10
secondi
Imposta l’intervallo di tempo in cui la funzione anti-deposito sarà attiva una volta avviata (ad esclusione del tempo necessario alle
operazioni di decelerazione – arresto).
Per i dettagli relativi alla configurazione della funzione anti-deposito vi invitiamo a consultare la sezione 7.6, Funzione anti-deposito, o
a contattare il distributore Invertek locale.
Selezione funzione pulizia
0
3
0
Questo parametro configura le condizioni dell’azionamento che porteranno all’attivazione della funzione di pulizia automatica della
pompa.
0 = Disabilitata
1 = Attiva solo all’avvio. La pulizia della pompa avviene ogni volta che la pompa viene avviata.
2 = Attiva all’avvio e nell’eventualità di coppia eccessiva. La pulizia della pompa avviene ogni volta che la pompa viene avviata, ed
anche ogni volta che l’azionamento individua un possibile blocco durante la normale fase operativa. È necessario che il Controllo del
profilo di carico di corrente sia attivo e impostato per operare correttamente; controllare il parametro P8-06.
3 = Attiva solo nell’eventualità di coppia eccessiva. La pulizia della pompa avviene esclusivamente quando viene individuato un
possibile blocco durante la normale fase operativa. È necessario che il Controllo del profilo di carico sia attivo e impostato per operare
correttamente; controllare il parametro P8-06.
Nota: La pulizia della pompa può essere attivata anche tramite gli ingressi digitali configurati nei parametri del gruppo 9.
Tempo pulizia
0
600
0
secondi
Imposta la durata del ciclo di pulizia della pompa. Quando è selezionata la funzione di pulizia bidirezionale, il valore impostato per la
durata è utilizzato due volte, una per ogni direzione di pulizia.
Tempo di rampa accelerazione funzione pulizia
0
6000
30
secondi
Valore indipendente di rampa utilizzato solo per la funzione di pulizia automatica della pompa (vedere P8-03) quando il motore viene
accelerato come parte del ciclo di pulizia.
Per i dettagli relativi alla configurazione della funzione di Pulizia consultare la sezione 13.5, Funzione pulizia della pompa, o
contattare il distributore Invertek locale.
Abilitazione controllo carico
0
3
0
Questo parametro abilita la funzione Controllo del profilo di carico (controllo della corrente di carico), che può essere utilizzata per
individuare un guasto della cinghia nel caso di ventole azionate tramite un sistema di trasmissione, oppure nell’eventualità di
funzionamento a secco della pompa, blocco o rottura della ventola.
0: Disabilitato
1: Rilevazione carico insufficiente abilitata (guasto della cinghia / funzionamento a secco della pompa / rottura della ventola)
2: Rilevazione e carico elevato abilitata (ostruzione della pompa)
3: Rilevazione corrente troppo elevata o troppo bassa
La regolazione dei parametri P8-06 (<>0) farà avviare automaticamente il motore alla frequenza programmata fino alla successiva
abilitazione dell’azionamento. Assicurarsi che il sistema si trovi in una condizione adatta per permettere al motore di funzionare in
sicurezza nella sua gamma di frequenze ammesse prima di abilitare la funzione.
Larghezza profilo carico
0,1
50
1
A
Questo parametro imposta la larghezza di banda del controllo di carico impostato in P8-06. Se P8-06 è stato impostato al valore
adatto ad individuare una condizione di sotto/sovraccarico e l’azionamento opera al di fuori della larghezza banda stabilita in P8-07
per un intervallo di tempo superiore a quello definito in P8-08, allora l’azionamento andrà in blocco. Il valore immesso in P8-07
corrisponde al valore tra la normale corrente di carico e il livello di blocco, pertanto la larghezza di banda totale sarà 2 x P8-07.
Ritardo allarme carico
0
60
0
secondi
Questo parametro imposta il tempo per il quale il carico deve funzionare oltre i limiti affinché l’azionamento vada in blocco secondo
le condizioni impostate in P8-06. Se P8-06 è stato impostato al valore adatto ad individuare una condizione di sotto/sovraccarico e
l’azionamento opera al di fuori della larghezza banda stabilita in P8-07 per un intervallo di tempo superiore a quello definito in P8-08
allora l’azionamento andrà in blocco
Per i dettagli relativi alla funzione Controllo carico consultare la sezione 13.4, Controllo del profilo di carico, o contattare il
distributore Invertek locale.
Logica modalità incendio
0
1
0
Quando viene assegnata la Modalità incendio ad un ingresso digitale, allora la configurazione logica dell’ingresso sarà impostata da
P8-09 per consentire un’attivazione con logica normalmente aperta o normalmente chiusa. Il comportamento di default è logica
ingresso aperta (off) (0) per attivare la Modalità incendio (aperto attivo).
La configurazione degli ingresso in Modalità incendio viene impostata dal parametro P1-13 o può venire definita dall’utente
determinando P9-32.
0 : Aperto attivo
1 : Chiuso attivo
P8-02
Nota:
P8-03
P8-04
P8-05
Nota:
P8-06
P8-07
P8-08
Nota:
P8-09
Minimo
www.invertek.co.uk
Massimo
Default
Unità di
misura
minuti
45
P8-10
Nota:
P8-11
P8-12
P8-13
Nota:
P8-14
P8-15
P8-16
P8-17
P8-18
P8-19
P8-20
Nota:
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Velocità modalità incendio
-P1-01
P1-01
5
Hz / Rpm
Imposta la frequenza operativa dell’azionamento quando è stata selezionata la Modalità incendio. L’azionamento rimarrà in funzione
a questa frequenza fino a che il segnale di Modalità incendio verrà rimosso o l’azionamento non sarà più in grado di continuare a
funzionare.
Per i dettagli relativi alla funzione Modalità incendio consultare la sezione 13.8, Modalità incendio, o contattare il distributore
Invertek locale.
Modalità bypass dopo allarme
0
1
0
Questo parametro consente all’azionamento di passare automaticamente alla Modalità bypass nell’eventualità di un guasto. Quando
abilitato, i relè standard 1 e 2 vengono dedicati al bypass di controllo e non possono essere assegnati ad altre funzioni.
0 = Disabilitato
1 = Abilitato
Modalità bypass per incendio
0
1
0
Questo parametro consente all’azionamento di passare automaticamente alla Modalità bypass quando un ingresso viene configurato
per operare in Modalità incendio e diventa attivo. Quando abilitato, i relè standard 1 e 2 vengono dedicati al bypass di controllo e non
possono essere assegnati ad altre funzioni.
0 = Disabilitato
1 = Abilitato
Tempo di commutazione circuito di bypass
0
30
2
secondi
Parametro attivo quando la modalità di bypass è abilitata. Il parametro P8-05 imposta il tempo di attesa o di commutazione
dell’accensione dei relè che controllano il circuito di bypass.
Prestare attenzione quando si imposta P8-13 e assicurarsi che i contattori della pompa a velocità fissa e dell’azionamento non
vengano accesi simultaneamente nel circuito.
Si raccomanda la regolazione meccanica ed elettrica conforme agli standard locali dei contattori della pompa a velocità fissa e
dell’azionamento quando si configura la funzione di bypass.
Per i dettagli relativi alla funzione Modalità bypass consultare la sezione 7.7, Bypass di controllo, o contattare il distributore Invertek
locale.
Selezione funzione multi pompe
0
2
0
Questo parametro abilita la funzione multipompe (a cascata).
0 = Disabilitato
1 = VFD singolo con pompe a velocità fissa alimentate direttamente (massimo 4 pompe a velocità fissa)
2 = Azionamento Master di un sistema multipompe con più azionamenti in rete (valido solo quando l’azionamento è impostato
all’indirizzo master Optibus, P5-01 = 1)
Numero di pompe asservite
0
4
0
Parametro valido quando P8-14 è impostato al valore di 1 o 2 per abilitare la funzione multipompe. P8-15 determina il numero di
pompe asservite (P8-14 = 1) o di azionamenti in modalità Slave (P8-14 = 2) disponibili in un impianto con più pompe. Impostando il
valore a 0 si disabilita la funzione multipompe.
Impostazione tempo lavoro di ogni pompa
0
1000
0
ore
È possibile impostare con P8-16 il limite di tempo per la commutazione delle pompe, così da bilanciare il tempo di funzionamento di
ogni pompa presente nell’impianto e da assicurare il funzionamento periodico di ogni pompa. Quando il valore impostato è diverso da
0 (disabilitato), il funzionamento di ogni pompa verrà alternato in modo tale che il tempo di funzionamento complessivo tra ogni
pompa asservita superi il valore impostato in P8-16.
Velocità di avvio pompe asservite
P8-18
P1-01
0
Hz / RPM
Limite di velocità superiore dell’HVAC Optidrive per avviare le pompe ausiliarie. Quando l’uscita dell’azionamento supera questo
limite, la successiva pompa ausiliaria presente nell’impianto viene accesa. Il tempo di lavoro minimo della pompa asservita deve
trascorrere prima di avviare o fermare altre pompe. Viene sempre data la priorità per l’accensione alla pompa che ha accumulato il
minor tempo di funzionamento.
Velocità di arresto pompe asservite
0
P8-17
0
Hz / RPM
Limite di velocità inferiore dell’HVAC Optidrive per arrestare le pompe ausiliarie. Quando l’uscita scende al di sotto di questo limite,
una delle pompe ausiliarie in funzione nell’impianto viene spenta. Il tempo di lavoro minimo della pompa asservita deve trascorrere
prima di avviare o fermare altre pompe. Viene sempre data la priorità per lo spegnimento alla pompa che ha accumulato il maggior
tempo di funzionamento.
Tempo di lavoro minimo della pompa asservita
10
600
10
secondi
Questo parametro determina un intervallo di tempo per l’impianto di pompaggio di modo che, in conseguenza all’accensione o
spegnimento di una pompa, le altre pompe non vengano accese o spente fino a che il suddetto intervallo di tempo sia trascorso.
Questo parametro dovrebbe venire impostato in maniera da permettere un adeguato tempo di assestamento tra le transizioni delle
pompe.
Reset contatore generale pompe
0
1
0
L’azionamento principale controlla e registra il tempo di funzionamento per tutte le pompe presenti nell’impianto di pompaggio. I
contatori si possono visualizzare in P0-20. P8-20 consente il ripristino completo di tutti i contatori usati per la funzione multipompe
(tutti gli orologi vengono reimpostati a 0).
Per i dettagli relativi alla configurazione della funzione multimpompe consultare le sezioni 7.1 e 7.2, o contattare il distributore
Invertek locale.
11.8. Gruppo 9 – Impostazione avanzata logica di controllo dell’azionamento
I parametri del gruppo 9 sono descritti nel dettaglio nel Manuale d’uso avanzato. È possibile accedere a questi parametri tramite tastierino
impostando un accesso di sicurezza avanzato (P1-14 = 201) oppure tramite la suite software Optitools Studio PC.
46
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
11.9. Gruppo 0 – Monitoraggio parametri in tempo reale (solo lettura)
Par
Descrizione
P0-01
Valore ingresso analogico 1
-100
100
Mostra il segnale analogico in ingresso 1 (morsetto 6) dopo che sono stati applicati la scala e l'offset.
Valore ingresso analogico 2
0
100
%
Mostra il segnale analogico in ingresso 2 (morsetto 10) dopo che sono stati applicati la scala e l'offset.
Stato ingressi digitali
00000
11111
Binary
Mostra lo stato degli ingressi dell'azionamento, compreso il modulo esteso I/O (se presente).
1° voce: 00000 ... 11111. Stato ingressi digitali. MSB rappresenta l’ingresso digitale 1 / LSB rappresenta l’ingresso digitale 5.
2° voce: E 000 ... E 111. Stato ingressi esteso (opzionale). MSB rappresenta l’ingresso digitale 6 / LSB rappresenta l’ingresso digitale 8.
Riferimento controllo velocità
-P1-01
P1-01
Hz / Rpm
Mostra il valore di riferimento in ingresso applicato al controllo interno della velocità dell'azionamento.
Riferimento digitale velocità (potenziometro
-P1-01
P1-01
Hz / Rpm
motorizzato)
Mostra il valore di riferimento della velocità applicato dal potenziometro motorizzato dell'azionamento (utilizzato per il tastierino).
Riferimento velocità da seriale
-P1-01
P1-01
Hz / Rpm
Mostra il valore di riferimento che l'azionamento riceve dall'interfaccia fieldbus attiva.
Riferimento ingresso PID (setpoint)
0
100
%
Mostra il valore di riferimento del controllore PID.
Retroazione PID
0
100
%
Mostra il segnale di retroazione per il controllore PID.
Uscita PID
0
100
%
Mostra il segnale in uscita del controllore PID.
Tensione motore
0
V
Mostra la tensione istantanea in uscita dall'azionamento al motore.
Registro allarmi
%
Mostra gli ultimi 4 codici di errore dell'azionamento. Fare riferimento alla sezione 12.1 per ulteriori informazioni.
Corrente di magnetismo (Id)
A
Mostra la corrente di magnetizzazione del motore, dopo che è stato completata con successo la procedura autotune.
Ripple tensione DC bus
Vrm
Mostra il valore dell'ondulazione (ripple) presente nella tensione DC del bus. Questo parametro viene usato dall'Optidrive per
funzioni di protezione interna e controllo.
Resistenza di statore (Rs)
Ohm
Mostra il valore della resistenza dello statore, dopo che è stato completato con successo un autotune.
Registro multipompe in funzione
Ore
Individua il tempo di funzioni della pompa principale e delle pompe ausiliarie comandate in cascata. 5 voci di registro.
0 = pompa principale (master), 1 = pompa ausiliaria 1, 2 = pompa ausiliaria 2, 3 = pompa ausiliaria 3, 4 = pompa ausiliaria 4
Gli orologi possono essere ripristinati con P8-20, Ripristino Master Clock.
Tensione DC bus
0
1000
V
Mostra la tensione DC interna del bus dell'azionamento.
Temperatura drive
0
°C
Mostra la temperatura misurata del dissipatore di calore dell'azionamento.
Tempo prossima manutenzione
Ore
Mostra quante ore rimangono sul contatore di servizio prima del prossimo intervento di manutenzione. La manutenzione viene
calcolata partendo dal valore immesso in P6-24 (Tempo mancante alla manutenzione) e dal tempo trascorso dall’abilitazione o
ripristino della funzione Tempo mancante alla manutenzione.
Tempo radiatore a >80°C
0
HH:MM:SS
Due voci di registro: la prima visualizza le ore, la seconda i minuti e secondi. Mostra quante ore e minuti l'Optidrive ha funzionato con
temperatura del dissipatore di calore superiore a 80°C. Questo parametro serve per protezione interna e controllo.
Tempo ambiente a >80°C
0
HH:MM:SS
Due voci di registro: la prima visualizza le ore, la seconda i minuti e secondi. Mostra quante ore e minuti l'Optidrive ha funzionato con
temperatura ambiente superiore a 80°C. Questo parametro serve all'Optidrive per funzioni di protezione interna e controllo.
Velocità stimata rotore
Hz
Mostra la velocità stimata del rotore..
Contatore kWh
0
999,9
kWh
Due voci di registro: la prima visualizza il contatore regolabile dall’utente (ripristino con P6-23). La seconda visualizza i valori non
regolabili. Mostra la quantità di energia consumata dall'azionamento in kWh. Quando viene raggiunto il valore 1000, il contatore kWh
viene reimpostato a 0, e il valore del parametro P0-27 ( misurazione in MWh) aumenta.
Contatore MWh
0
65535
MWh
Due voci di registro: la prima visualizza il contatore regolabile dall’utente (ripristino con P6-23). La seconda visualizza i valori non
regolabili. Mostra la quantità di energia consumata dall'azionamento in MWh.
Versione software e checksum
Mostra la versione del software dell'azionamento: Quattro voci di registro che indicano rispettivamente:
1° = Versione IO, 2° = IO Checksum, 3° = Versione DSP Verion, 4° = DSP Checksum
P0-02
P0-03
P0-04
P0-06
P0-07
P0-08
P0-09
P0-10
P0-11
P0-13
P0-14
P0-16
P0-17
P0-19
P0-20
P0-21
P0-22
P0-23
P0-24
P0-25
P0-26
P0-27
P0-28
Minimo
www.invertek.co.uk
Massimo
Default
Unità di
misura
%
47
P0-29
P0-30
P0-31
P0-32
P0-33
P0-34
P0-35
P0-36
P0-37
P0-38
P0-39
P0-40
Nota:
P0-41
P0-42
P0-43
P0-44
P0-45
P0-46
Note
P0-49
P0-51
P0-52
P0-58
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Modello drive
Mostra i dettagli relativi al modello dell'azionamento. Tre voci di registro che indicano rispettivamente:
1° = Taglia e tensione in ingresso 2° = Potenza nominale 3° = Numero fasi in uscita
Numero di serie drive
Mostra il numero di serie unico dell'azionamento. Due voci di registro che indicano rispettivamente:
1° = numero di serie (MSB), 2° = numero di serie (LMSB)
Funzionamento da produzione
0
HH:MM:SS
Due voci di registro: la prima indica le ore, la seconda i minuti e secondi. Mostra l'ammontare della vita operativa dell'azionamento.
Tempo funzionamento da allarme 1
0
99999 H
HH:MM:SS
Due voci di registro: la prima indica le ore, la seconda i minuti e secondi.
Mostra il periodo di operatività dell'azionamento dall'ultimo blocco per guasto o errore. L’orologio contatore si ferma quando
l’azionamento viene disabilitato (o a fronte di un guasto), e viene ripristinato al primo riavvio solo in caso di guasto. Il ripristino
avviene anche in occasione della prima abilitazione successiva allo spegnimento dell’azionamento.
Tempo funzionamento da allarme 2
0
99999 H
HH:MM:SS
Due voci di registro: la prima indica le ore, la seconda i minuti e secondi.
Mostra il periodo di operatività dell'azionamento dall'ultimo blocco per guasto o errore. L’orologio contatore si ferma quando
l’azionamento viene disabilitato (o a fronte di un guasto), e viene ripristinato al primo riavvio solo in caso di guasto (la sottotensione
non viene considerata un guasto) – nessun ripristino in caso di calo/ripresa dell’alimentazione, sempre che non sia occorso un guasto
prima dello spegnimento dell’azionamento.
Tempo funzionamento dall'ultima fermata
0
99999 H
HH:MM:SS
Due voci di registro: la prima indica le ore, la seconda i minuti e secondi.
Mostra il periodo di operatività dell'azionamento dall’ultimo comando di avvio.
Funzionamento totale ventole
0
99999 H
HH:MM:SS
Mostra il periodo di operatività della ventola di raffreddamento interna dell'Optidrive.
Due voci di registro: la prima visualizza il tempo regolabile dall’utente (ripristino con P6-22). La seconda visualizza valori non
regolabili. Informazioni utili alla manutenzione periodica.
Registro tensione Bus CC (256 ms)
Registro di diagnostica per la tensione bus CC. I valori vengono registrati ogni 256 mS con 8 esempi. Il registro viene sospeso in caso di
guasto dell’azionamento.
Registro oscillazioni Bus CC (20 ms)
Registro di diagnostica per le oscillazioni bus CC. I valori vengono registrati ogni 20 mS con 8 esempi. Il registro viene sospeso in caso
di guasto dell’azionamento.
Registro temperature radiatore (30 s)
Registro di diagnostica per la temperatura del radiatore. I valori vengono registrati ogni 30 S con 8 esempi. Il registro viene sospeso in
caso di guasto dell’azionamento.
Registro temperature ambiente (30 s)
Registro di diagnostica per la temperatura ambientale. I valori vengono registrati ogni 30 S con 8 esempi. Il registro viene sospeso in
caso di guasto dell’azionamento.
Registro corrente motore (256 ms)
Registro di diagnostica per la corrente del motore. I valori vengono registrati ogni 256 mS con 8 esempi. Il registro viene sospeso in
caso di guasto dell’azionamento.
I sopracitati parametri (da P0-36 a P0-40) servono a conservare lo storico di diversi valori misurati dall’azionamento ad intervalli
regolari di tempo prima di un guasto. Tali dati vengono “congelati” in caso di guasto, e sono utili alla diagnostica.
Contatore allarme sovracorrente
0
0
Contatore allarme sovratensione
0
0
Contatore allarme sottotensione
0
0
Contatore allarme sovratemperatura
0
0
Contatore allarme corto circuito chopper frenatura
0
0
Contatore allarme sovratemperatura ambientale
0
0
I sopracitati parametri (P0-41 to P0-46) rappresentano un registro di quante volte un guasto critico è occorso nel corso della vita
operativa dell’azionamento. Tali dati sono utili alla diagnostica.
Contatore allarmi Modbus / BACnet
0
0
Questo parametro viene incrementato quando c’è un errore nella comunicazione Modbus RTU. Tali dati sono utili alla diagnostica.
Contatore attivazione Modalità incendio
Ore
Questo parametro mostra l’inizio dell’ultimo evento occorso in Modalità incendio (consultare la sezione 13.8 – Funzione Modalità
incendio). Il valore registrato in P0-51 viene preso dal parametro P0-31, Funzionamento da data di fabbricazione
Contatore funzionamento Modalità incendio
Ore
Questo parametro mostra il registro di quanti minuti hanno visto l’azionamento operare in Modalità incendio (consultare la sezione
13.8 – Funzione Modalità incendio).
Registro coppia assorbita
A
Questo parametro registra i 5 valori relativi alla corrente misurata durante l’Autotune della coppia di carico.
5 voci di registro: Corrente alla velocità minima
Corrente al primo intervallo di misura
Corrente al secondo intervallo di misura
Corrente al terzo intervallo di misura
Corrente alla velocità massima
48
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
12.Comunicazioni seriali
12.1. Interfaccia RS-485
L'Optidrive HVAC presenta un connettore RJ45 sulla parte frontale del pannello di controllo. Questo connettore consente di collegare in rete
più azionamenti tramite collegamento cablato. Il connettore ospita due interfacce seriali RS485 indipendenti, una per il Protocollo Optibus
Invertek e una per il Modbus RTU / BACnet. Entrambe le connessioni possono essere utilizzate simultaneamente.
Si riporta di seguito la disposizione dei segnali elettrici del connettore RJ45:
Non utilizzato
Non utilizzato
0V
Optibus / Tastierino remoto / PC Optibus / Tastierino remoto / PC +
+24 V Alimentazione tastierino remoto
RS 485- Modbus RTU / BACnet
RS 485+ Modbus RTU / BACnet
Attenzione
Non è una connessione Ethernet.
Non collegare direttamente ad una
porta Ethernet.
Il datalink dell'Optibus serve per la funzione Master / Slave (fare riferimento al Manuale d'Uso Avanzato per ulteriori informazioni). Si possono
collegare fino a 62 slave a un azionamento master.
L'interfaccia Modbus permette la connessione a una rete Modbus RTU come descritto sotto.
12.2. Interfaccia ModbusRTU
12.2.1.
Struttura dei telegrammi Modbus
Optidrive HVAC2 P2 supporta le comunicazioni Master / Slave Modbus RTU, servendosi dei comandi 03 Lettura Registro e 06 Scrittura
Registro. Molti dispositivi Master trattano il primo indirizzo di registro come Registro 0; pertanto potrebbe essere necessario convertire i
numeri di registro sottraendo 1 così da ottenere il registro di indirizzo corretto. La struttura dei telegrammi è la seguente:-
Telegramma Master
Indirizzo Slave
Codice funzione (03)
Indirizzo 1° registro
Numero di registri
CRC Checksum
Telegramma Master
Indirizzo Slave
Codice funzione (06)
Indirizzo registro
Value
CRC Checksum
Comando 03 – Lettura Registro
Lunghezza
Risposta Slave
1 Byte
Indirizzo Slave
1 Byte
Indirizzo iniziale
2 Byte
Valore 1° registro
2 Byte
Valore 2° registro
2 Byte
ecc...
CRC Checksum
Comando 06 – Scrittura Registro
Lunghezza
Risposta Slave
1 Byte
Indirizzo Slave
1 Byte
Codice funzione
(06)
2 Byte
Indirizzo registro
2 Byte
Valore registro
2 Byte
CRC Checksum
www.invertek.co.uk
Lunghezza
1 Byte
1 Byte
2 Byte
2 Byte
2
Byte
Lunghezza
1 Byte
1 Byte
2
2
2
Byte
Byte
Byte
49
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
12.2.2.
Controllo Modbus e Registri di controllo
Qui di seguito viene riportata una lista dei registri Modbus accessibili disponibili per l’Optidrive HVAC.
I registri 1 e 2 si possono essere utilizzati per controllare l'azionamento, sempre che il Modbus RTU sia selezionato come sorgente
comando principale (P1-12 = 4).
Il registro 4 si può utilizzare per controllare l'accelerazione e decelerazione dell'azionamento, sempre che la rampa di controllo del
fieldbus risulti abilitata (P5-07 = 1)
I registri da 6 a 24 possono essere letti indipendentemente dalle impostazioni di P1-12
Registro
Byte
Byte
superiore
inferiore
Parola di controllo dei
comandi
Lettura
Scrittura
L/S
Comando Velocità di
riferimento
Comando Coppia di
riferimento
Comando Tempi di rampa
L/S
Frequenza di uscita
Corrente di uscita
Coppia di uscita
Potenza di uscita
Stato ingresso digitale
L
L
L
L
L
Segnale analogico 1
L
Segnale analogico2
L
Velocità di riferimento prerampa
Tensione bus CC
Temperatura
L
Comando per controllare l'Optidrive quando si opera con Modbus RTU. Le funzioni
dei bit sono le seguenti :Bit 0 : Comando Marcia/Arresto. Impostare su 1 per avviare l'azionamento, su 0
per arrestarlo.
Bit 1 : Arresto veloce. Impostare su 1 per permettere all'azionamento di arrestarsi
con la seconda rampa di decelerazione.
Bit 2 : Riavvio. Impostare su 1 per permettere il riavvio in seguito ad un errore o
blocco dell'azionamento. Reimpostare a 0 una volta che il guasto è stato risolto.
Bit 3 : Rallentamento-arresto. Impostare su 1 per provocare il rallentamento e il
successivo arresto spontaneo per inerzia.
Il setpoint deve essere impostato in Hz con un decimale dopo la virgola, ad es. 500
= 50,0 Hz
Il setpoint deve essere impostato in Hz con un decimale dopo la virgola, ad es.
2000 = 200,0 %
Questo registro specifica i tempi di rampa di accelerazione e decelerazione usati
quando è selezionato il Controllo rampa fieldbus (P5-08 = 1), indipendentemente
dal valore di P1-12. I dati immessi vanno da 0 a 60000 (da 0,00 s a 600,00 s)
Questo registro contiene 2 byte.
Il Byte inferiore contiene un drive status da 8 bit :Bit 0 : 0 = Disabilitato (Arrestato), 1 = Abilitato (In funzione)
Bit 1 : 0 = In funzione, 1 = Bloccato
Il Byte superiore conterrà il codice di errore rilevante utile in caso di blocco. Fare
riferimento alla sezione 15.1 per una lista di codici di errore / guasto e per
informazioni sulla risoluzione dei problemi.
Frequenza di uscita indicata con un decimale dopo la virgola, ad es. 123 = 12,3 Hz
Corrente di uscita indicata con un decimale dopo la virgola, ad es. 105 = 10,5 A
Coppia di uscita indicata con un decimale dopo la virgola, ad es. 474 = 47,4 %
Potenza di uscita indicata con due decimali dopo la virgola, ad es. 1100 = 11,00 kW
Indica lo stato degli ingressi dell'azionamento, dove Bit 0 = Ingresso digitale 1 e
così via.
Segnale applicato all’ingresso analogico 1 indicato in % con un decimale dopo la
virgola, ad es. 1000 = 100,0 %
Segnale applicato in ingresso analogico 2 indicato in % con un decimale dopo la
virgola, ad es. 1000 = 100,0 %
Valore della frequenza interna dell'azionamento
L
L
Tensione bus CC in V
Temperatura dissipatore di calore in °C
1
2
3
L/S
L/S
4
Codice di
errore
Stato
L
6
7
8
9
10
11
20
21
22
23
24
Note
12.2.3. Accesso ai parametri Modbus
Tutti i parametri modificabili (gruppi da 1 a 5) sono accessibili tramite Modbus, tranne quelli che influiscono direttamente sulla comunicazione
Modbus. Per esempio:
P5-01 Selezione protocollo di comunicazione
P5-03 Baud rate del Modbus RTU
P5-04 Formato dati del Modbus RTU
Tutti i parametri sono disponibili per lettura e scrittura, a seconda della modalità operativa dell'azionamento; alcuni parametri, per esempio,
non possono essere modificati mentre l'azionamento è in funzione. Quando si accede ad un parametro tramiteModbus, il numero di registro
del parametro corrisponde al numero del parametro.
Ad esempio: Parametro P1-01 = Registro Modbus 101. Il Modbus RTU supporta numeri interi a 16 bit, perciò se dovesse essere presente un
decimale nel parametro il valore del registro verrà moltiplicato per 10. Ad esempio: Valore di lettura P1-01 = 500, perciò il valore è 50,0 Hz.
Per ulteriori dettagli sulla comunicazione Modbus RTU, fare riferimento al Distributore Autorizzato Invertek di zona.
50
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
13.Specifiche tecniche
13.1. Ambiente
Temperatura ambientale
Funzionamento
: -10 … 40C
: Max 50C con declassamento
: -40 C … 60 C
: 1000 m
: 1% / 100m oltre 1000 m
: Entro 2000 m conforme alle norme UL
: Entro 4000 m non conforme alle norme UL
: inferiore al 95 % (senza condensa)
Stoccaggio
Altitudine massima per specifiche garantite
Declassamento oltre 1000 m
Umidità relativa
13.2. Tensione di alimentazione
A seconda del modello e della potenza, gli azionamenti permettono la connessione diretta alle seguenti alimentazioni:
Modello
Tensione di alimentazione
ODV-2-x2xxx-1xxxx
ODV-2-x2xxx-3xxxx
ODV-2-x4xxx-3xxxx
Fasi
1
3
3
200 – 240 V + 10% / -15%
380 – 480 V +10% / - 15%
Frequenza
50 – 60 Hz
Tutte le unità Optidrive HVAC presentano il controllo dello sbilanciamento delle fasi. Uno sbilanciamento di fase maggiore del 3% porterà al
blocco dell'azionamento. Per tutte le alimentazioni in ingresso che mostrano uno sbilanciamento maggiore del 3% (tipico della regione
dell'India e dell'Asia pacifica inclusa la Cina), Invertek Drives raccomanda l'installazione di reattori di linea in ingresso, oppure si può far
funzionare l'azionamento in modalità monofase con un declassamento del 50 %.
13.3. Alimentazione massima consentita in conformità alle norme UL
Valori nominali dell'azionamento
Tensione massima
dell'alimentazione
Corrente di corto circuito massima
sull’alimentazione
230 V
240 V rms (CA)
5 kA rms (CA)
Da 0,37kW (0,5 HP) a 18.5kW (25 HP)
230 V
240 V rms (CA)
10 kA rms (CA)
Da 22kW (30 HP) a 90 kW (120 HP)
400/460 V/600 V
500 V/600 V rms (CA)
5 kA rms (CA)
Da 0,75 kW (1 HP) a 37 kW (50 HP)
400/460 V/600 V
500 V/600 V rms (CA)
10 kA rms (CA)
Da 45 kW (60 HP) a 132 kW (175 HP)
400/460 V/600 V
500 V/600 V rms (CA)
18 kA rms (CA)
160 kW (210 HP)
Tutti gli azionamenti presenti in tabella possono essere utilizzati in un circuito in grado di erogare non più degli Ampére massimi di corto
circuito simmetrici per la tensione di alimentazione massima specificata.
Per ulteriori dettagli sulla potenza/taglia dell'azionamento, far riferimento alla brochure Optidrive.
13.4. Potenza e corrente di uscita
Le seguenti tabelle forniscono informazioni sulla corrente di uscita per i diversi modelli di Optidrive HVAC. Invertek Drives raccomanda sempre
di scegliere l'Optidrive corretto basandosi sulla corrente a pieno carico del motore e sulla tensione di alimentazione in ingresso.
200 – 240 V (+ / -10%) ingresso monofase, uscita trifase
kW
0,75
1,5
2,2
HP
1
2
3
Taglia
2
2
2
Corrente in
ingresso
nominale
Fusibile o
MCB
(tipo B)
Sezione
cavo
alimentazione
A
10,5
16,2
23,8
A
16
16
25
mm
1,5
1,5
4
2
Corrente in
uscita
nominale
110%
Corrente in
uscita
60 sec
A
4,3
7
10,5
www.invertek.co.uk
A
4,73
7,7
11,55
Sezione cavo
motore
mm
1,5
1,5
1,5
2
AWG
14
14
14
Lunghezza max cavo motore
m
100
100
100
51
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Ingresso trifase 200 – 240 V (+ / - 10%), uscita trifase
kW
HP
Taglia
Corrente
Fusibile o
in ingresso
MCB
nominale
(tipo B)
0,75
1,5
2,2
4
5,5
7,5
11
15
18,5
22
30
37
45
55
75
90
1
2
3
5
7.5
10
15
20
25
30
40
50
60
75
100
120
2
2
2
3
3
4
4
5
5
5
6
6
6
6
7
7
A
A
Sezione
cavo
alimentazione
mm2
5,7
8,4
13,7
17,3
25
46,6
54,1
69,6
76,9
92,3
116,9
150,2
176,5
211
251
301
10
16
20
32
40
50
63
80
80
100
125
160
200
250
315
315
1,5
2,5
4
6
6
10
16
25
25
35
50
70
90
120
120
170
4,3
7
10,5
18
24
39
46
61
72
90
110
150
180
202
248
312
4,73
7,7
11,55
19,8
26,4
42,9
50,6
67,1
79,2
99
121
165
198
222,2
272,8
343,2
Sezione
cavo
alimentazione
mm2
Corrente in
uscita
nominale
110%
Corrente in
uscita
60 sec
A
Ingresso trifase 380 – 480 V (+ / - 10%), uscita trifase
kW
HP
Taglia
Corrente
Fusibile o
in
MCB
ingresso
(tipo B)
nominale
A
A
Corrente in
uscita
nominale
A
110%
Corrente in
uscita
60 sec
A
mm2
AWG
m
1,5
1,5
1,5
2.5
4
10
10
16
16
25
35
55
70
90
120
170
14
14
14
12
10
8
6
4
4
2
1/0
2/0
3/0
4/0
-
100
100
100
100
100
100
100
100
100
100
100
100
100
100
100
100
A
Sezione cavo
motore
Sezione cavo
motore
mm2
AWG
Lunghezza max cavo motore
Lunghezza max cavo motore
m
0,75
1
2
3,1
6
1
2,2
2,42
1
14
100
1,5
2
2
4,8
6
1
4,1
4,51
1
14
100
2,2
3
2
7,2
10
1,5
5,8
6,38
1,5
14
100
4
5
2
10,8
16
2,5
9,5
10,45
1,5
12
100
5,5
7.5
3
13,3
20
2,5
14
15,4
2,5
12
100
7,5
10
3
18,5
20
4
18
19,8
2,5
10
100
11
15
4
26,5
25
4
24
26,4
4
8
100
15
20
4
32,9
50
6
30
33
6
6
100
18,5
25
4
46,6
50
10
39
42,9
10
6
100
22
30
4
54,1
63
16
46
50,6
10
4
100
30
40
5
69,6
80
25
61
67,1
16
2
100
37
50
5
76,9
80
25
72
79,2
16
2
100
45
60
5
92,3
100
35
90
99
25
1
100
55
75
6
116,9
125
50
110
121
35
2/0
100
75
120
6
150,2
160
70
150
165
55
3/0
100
90
150
6
176,5
200
90
180
198
70
100
110
175
6
217,2
250
120
202
222,2
90
100
132
200
7
255,7
315
120
240
264
120
100
160
250
7
302,4
315
170
300
330
170
100
Note
La lunghezza massima del cavo motore è riferita all'utilizzo di un cavo schermato. Quando si utilizza un cavo motore non schermato, la
lunghezza massima consentita può essere incrementata del 50 %. Quando si utilizza un’induttanza di uscita consigliata Invertek Drives, la
lunghezza massima consentita può essere incrementata del 100 %.
Quando il cavo motore è lungo, l'uscita dell’azionamento con modulazione PWM può provocare un aumento della tensione ai morsetti, a
seconda della lunghezza e dell'induttanza del cavo motore. Il tempo di salita e il picco della tensione possono influenzare la vita operativa
dell'azionamento. Invertek Drives consiglia l'utilizzo di un’induttanza di uscita per cavi motore di 50 metri o più, così da garantire
operatività ottimale al motore
Per l'installazione conforme alle norme UL , usare fili di rame con temperatura di isolamento minima di 75°C, e fusibili Classe CC o Classe J
a norma UL
52
www.invertek.co.uk
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
14.Tavola per la modifica dei parametri
La seguente tabella può essere utilizzata per documentare le modifiche effettuate durante l’installazione e come riferimento per il futuro.
P1-01
P1-02
P1-03
P1-04
P1-05
P1-06
P1-07
P1-08
P1-09
P1-10
P1-11
P1-12
P1-13
P1-14
P2-01
P2-02
P2-03
P2-04
P2-05
P2-06
P3-03
P3-04
P3-05
P3-06
P3-07
P3-08
P3-09
P3-10
P3-11
P3-12
P3-13
P3-14
P3-15
P4-02
P5-01
P5-03
P5-04
P5-05
P5-06
P5-07
Costante tempo differenziale PID
Modo operativo PID
Selezione riferimento PID
Valore riferimento digitale PID
Limite d'uscita alto PID
Limite d'uscita basso PID
Controllo limite uscita PID
Selezione segnale di retroazione PID
Errore PID per abilitazione rampa
Scalatura valore di retroazione PID
Livello di retroazione per wake up PID
Livello velocità standby
Valore 2° riferimento PID
Abilitazione Auto-tune motore
Indirizzo comunicazione bus di campo
Velocità Modbus RTU / BACnet
Formato dati Modbus / BACnet
Tempo massimo perdita di comunicazione
Azione dopo perdita di comunicazione
Controllo rampe con bus di campo
P5-08
Uscita bus PDO-4
P2-08
P2-09
P2-10
P2-11
P2-12
P2-13
P2-14
P2-15
P2-16
P2-17
P2-18
P2-19
P2-20
P2-21
P2-22
P2-23
P2-24
P2-25
P2-26
P2-27
P2-28
P2-29
P2-30
P2-31
P2-32
Frequenza massima / Limite velocità
Frequenza minima / Limite velocità
Tempo rampa accelerazione
Tempo rampa decelerazione
Modalità di stop
Risparmio energia
Tensione nominale motore
Corrente nominale motore
Frequenza nominale motore
Velocità nominale motore
Boost di tensione in modalità V/F
Selezione modo operativo
Funzione ingressi digitali
Accesso menù esteso
Velocità preimpostata 1
Velocità preimpostata 2
Velocità preimpostata 3
Velocità preimpostata 4
Velocità preimpostata 5 /Velocità di pulizia 1
Velocità preimpostata 6 /Velocità di pulizia 2
Velocità preimpostata 7 / Velocità di Boost /
Funzione anti-deposito
Velocità preimpostata 8 / Velocità di Boost 2
Centro salto di frequenza
Larghezza salto di frequenza
Funzione uscita analogica 1
Formato uscita analogica 1
Funzione uscita analogica 2
Formato uscita analogica 2
Funzione relè di uscita 1
Limite superiore relè 1
Limite inferiore relè 1
Funzione relè di uscita 2
Limite superiore relè 2
Limite inferiore relè 2
Scalatura display
Sorgente scala display
Tempo mantenimento velocità zero
Frequenza di switching reale
Tempo rampa decelerazione rapida
Abilitazione Spin Start
Tempo intervento modalità standby
Scalatura velocità Slave
Scalatura velocità digitale
Formato ingresso analogico 1
Scala ingresso analogico 1
Offset ingresso analogico 1
P6-01
P6-02
P6-03
P6-04
P6-10
P6-11
P6-12
P6-18
P6-22
P6-23
P6-24
P6-25
P6-26
P6-27
P6-28
P6-29
P6-30
P7-01
P7-04
P7-11
P7-12
P8-01
P8-02
P8-03
P8-04
P2-33
Formato ingresso analogico 2
P8-05
P2-34
P2-35
P2-36
P2-37
P2-38
P2-39
P2-40
P3-01
P3-02
Scala ingresso analogico 2
Offset ingresso analogico 2
Modalità di start / Restart automatico
Restart con tastierino
Arresto per mancanza rete / Controllo arresto
Blocco parametri
Accesso al menù esteso
Guadagno proporzionale PID
Costante tempo integrale PID
P8-06
P8-07
P8-08
P8-09
P8-10
P8-11
P8-12
P8-13
P8-14
Abilitazione aggiornamento firmware
Gestione automatica temperatura
Tempo ritardo auto-reset
Isteresi relè velocità
Abilitazione funzione PLC
Ritardo all’abilitazione
Ritardo alla disabilitazione
Iniezione tensione CC in frenatura
Ripristino tempo funzionamento ventilatori
Reset misuratore kWh
Tempo intervallo manutenzione
Reset tempo intervallo manutenzione
Scalatura uscita analogica 1
Offset uscita analogica 1
Indice P0-80
Salva i parametri di base
Codice di accesso livello 3
Valore Rs
Corrente magnetizzazione
Limite minimo larghezza impulso
Intervallo di magnetizzazione modalità V/F
Intervallo anti-deposito
Durata funzione anti-deposito
Selezione funzione pulizia
Tempo pulizia
Tempo di rampa accelerazione funzione
pulizia
Abilitazione controllo carico
Larghezza profilo carico
Ritardo allarme carico
Logica Modalità incendio
Velocità Modalità incendio
Modalità bypass dopo allarme
Modalità bypass per incendio
Tempo di commutazione circuito di bypass
Selezione funzione impianti di pompaggio
P2-07
www.invertek.co.uk
53
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
P8-15
P8-16
P8-17
P8-18
P8-19
P8-20
P9-01
P9-02
P9-03
P9-04
P9-05
P9-06
P9-07
P9-08
P9-09
P9-10
P9-11
P9-12
P9-13
P9-14
P9-15
P9-16
54
Numero pompe asservite
Tempo lavoro di ogni pompa
Velocità avvio pompe asservite
Velocità arresto pompe asservite
Tempo di assestamento pompe
Ripristino contatore pompa principale
Sorgente abilitazione ingresso
Sorgente ingresso arresto rapido
Sorgente ingresso marcia avanti
Sorgente ingresso marcia indietro
Ingresso di fermata
Abilitazione inversione
Sorgente ripristino ingresso
Ingresso anomalia esterna
Selezione controllo terminale
Ingresso per velocità 1
Ingresso per velocità 2
Ingresso per velocità 3
Ingresso per velocità 4
Ingresso per velocità 5
Ingresso per velocità 6
Ingresso per velocità 7
P9-17
P9-18
P9-19
P9-20
P9-21
P9-22
P9-23
P9-28
P9-29
P9-32
P9-33
P9-34
P9-35
P9-36
P9-37
P9-38
P9-39
P9-41
P9-42
P9-43
P9-44
www.invertek.co.uk
Ingresso per velocità 8
Velocità ingresso 0
Velocità ingresso 1
Velocità ingresso 2
Velocità preimpostata ingresso 0
Velocità preimpostata ingresso 1
Velocità preimpostata ingresso 2
Ingresso aumento velocità
Ingresso diminuzione velocità
Ingresso Modalità incendio
Selezione uscita analogica 1
Selezione uscita analogica 2
Selezione controllo relè 1
Selezione controllo relè 2
Selezione controllo scala
Selezione riferimento PID
Selezione retroazione PID
Selezione funzioni relè 3, 4, 5
Ingresso avvio pulizia
Ingresso avvio Bypass
Selezione 2° ingresso digitale rif.PID
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
15.Risoluzione dei problemi
15.1. Messaggi di errore
Guasto /
errore
N.
Messaggio
00 Nessun guasto/errore
03 Blocco per
sovracorrente
Descrizione
Azione correttiva
Nessun guasto/errore
Viene visualizzato in P0-13 se non ci sono guasti rilevati nel registro.
Sovracorrente istantanea
sull'uscita dell'azionamento
Guasto all'abilitazione dell'azionamento
Controllare il motore e i cavi motore per verificare l'eventuale presenza di
corto circuiti fase-fase e fase-terra. Controllare meccanicamente il carico per
verificare l'eventuale presenza di un inceppamento, un blocco o una
condizione di stallo.
Assicurarsi che i dati di targa motore siano stati correttamente inseriti, P107, P1-08, P1-09. Ridurre il valore del Boost di tensione impostato nel
parametro P1-11. Aumentare la durata della rampa dell'accelerazione in P103. Se è presente il freno del motore, assicurarsi che il freno sia
correttamente collegato e adeguatamente controllato, e che si sblocchi i in
maniera regolare.
Controllare quando i punti decimali lampeggiano (azionamento
sovraccarico) e aumentare la velocità di accelerazione o diminuire il carico.
Controllare che la lunghezza del cavo motore rientri nei limiti indicati per
l'azionamento nella sezione 0. Assicurarsi che i dati di targa del motore
siano stati correttamente inseriti in P1-07, P1-08, and P1-09. Controllare
meccanicamente il carico per verificare che sia libero, e che non ci siano
inceppamenti, blocchi o altri guasti meccanici.
Fare riferimento al guasto 03
. 04 Blocco per sovraccarico L'azionamento si è bloccato
per sovraccarico dopo aver
erogato più del 100% del
valore in P1-08
05 Blocco stadio di
06
07
08
09
10
11
12
13
14
15
16
17
potenza
Sovratensione
Sovracorrente istantanea
sull'uscita dell'azionamento
Sovratensione sul bus CC
Il valore della tensione del Bus CC viene mostrato in P0-20.
Viene conservato un registro storico a intervalli di 256 ms prima di un blocco
al parametro P0-36.
Questo tipo di guasto viene generalmente causato da un eccessivo
trasferimento di energia rigenerativa dal carico all'azionamento, quando
l'inerzia è elevata o il carico collegato è un sistema di trasporto. Se il guasto
avviene all'arresto o durante la decelerazione, aumentare la rampa di
decelerazione P1-04. Se si sta operando in modalità Controllo PID,
assicurarsi che le rampe siano attive riducendo P3-11.
Sottotensione
Sottotensione sul bus CC
Questo guasto avviene solitamente quando viene interrotta l'alimentazione.
Se si verifica mentre l'azionamento è in funzione, controllare la tensione
dell'alimentazione in ingresso, e tutti i collegamenti di azionamento, fusibili,
contattori, ecc.
Blocco per
Surriscaldamento del
La temperatura del dissipatore di calore si può visualizzare in P0-21.
surriscaldamento
dissipatore di calore
Viene conservato un registro storico a intervalli di 30 secondi prima di un
blocco al parametro P0-38. Controllare la temperatura dell'ambiente.
Assicurarsi che la ventola di raffreddamento interna dell'azionamento sia
funzionante. Assicurarsi che sia stato osservato lo spazio di installazione
necessario come illustrato nella sezione 3.6, e che lo spazio di ventilazione
dell'azionamento non sia ostruito. Ridurre l'effettiva frequenza di switching
nel parametro P2-24. Ridurre il carico sul motore e/o sull'azionamento.
Blocco per
Raffreddamento
Il blocco avviene quando la temperatura ambientale è inferiore a -10°C. La
raffreddamento
temperatura deve essere portata sopra i -10°C per avviare l'azionamento.
Caricamento delle
Sono state caricate le
Premere il tasto STOP, l'azionamento è ora pronto ad essere configurato per
impostazioni di fabbrica impostazioni di fabbrica
le applicazioni desiderate. Per i 4 tasti di default consultare la sezione 5.4.
Blocco esterno
Blocco esterno
Blocco richiesto tramite l’apposito ingresso sulla morsettiera. Alcune
impostazioni di P1-13 richiedono di solito un contattore chiuso per
procurare un blocco esterno all'azionamento, nel caso un dispositivo
esterno sviluppi un guasto. Se è collegato un termistore sul motore,
controllare che il motore non sia troppo caldo.
Errore comunicazione
Errore nella comunicazione
È caduta la comunicazione con il PC o con il tastierino. Controllare i cavi ed i
seriale Optibus
collegamenti ai dispositivi esterni.
Ondulazione eccessiva Tensione CC ondulazione
La tensione di ondulazione del Bus CC si può visualizzare nel parametro P0CC
eccessiva
16. Viene conservato un registro storico a intervalli di 20ms prima di un
blocco al parametro P0-37.
Controllare che siano presenti tutte e tre le fasi dell'alimentazione ed entro
il 3 % della tolleranza di sbilanciamento della tensione di alimentazione.
Ridurre il carico del motore. Se il guasto persiste, contattare il proprio
Distributore Autorizzato Invertek Drives.
Perdita fase in ingresso Blocco per perdita della fase in L'azionamento è inteso per l'utilizzo con alimentazione trifase, l'ingresso
ingresso
monofase è stato scollegato o si è interrotto.
Sovracorrente
Sovracorrente istantanea
Fare riferimento al guasto 03.
istantanea
sull'uscita dell'azionamento
Guasto termistore
Guasto al termistore del
Contattare il proprio Distributore Autorizzato Invertek Drives.
dissipatore di calore
Errore I/O
Errore della memoria interna I parametri non sono stati salvati, verranno ricaricate le impostazioni di
fabbrica. Riprovare. Se il problema persiste, contattare il proprio
Distributore Autorizzato Invertek Drives.
www.invertek.co.uk
55
Optidrive ODV-2 Manuale d’uso e installazione Revisione 1.02
Guasto /
errore
N.
18
Messaggio
Descrizione
Azione correttiva
Perdita segnale 4-20
mA
Il segnale 4-20 mA è stato
perso
Il segnale di riferimento agli ingressi analogici 1 o 2 (morsetti 6 o 10) è
andato sotto la soglia minima di 3 mA, quando l’intervallo standard è
impostato a 4-20 mA. Controllare la sorgente del segnale e il cablaggio della
morsettiera.
I parametri non sono stati salvati, verranno ricaricate le impostazioni di
fabbrica. Riprovare. Se il problema persiste, contattare il proprio
Distributore Autorizzato Invertek Drives.
Sono stati caricati i parametri di default impostati dall'utente. Premere il
tasto Stop. Per i tre tasti di default consultare la sezione 5.5.
Il sensore PTC collegato ha causato il blocco dell'azionamento (ingresso
analogico 2 configurato per dispositivi PTC).
Controllare e, se necessario, sostituire la ventola di raffreddamento interna
dell'azionamento.
La temperatura esterna rilevata supera il limite indicato che permette il
funzionamento dell'azionamento. Assicurarsi che la ventola di
raffreddamento interna sia operativa. Assicurarsi che sia stato rispettato lo
spazio di installazione necessario come illustrato nella sezione 3.6, e che lo
spazio di ventilazione dell'azionamento non sia ostruito. Aumentare la
ventilazione dell'azionamento. Ridurre l'effettiva frequenza di switching nel
parametro P2-24. Ridurre il carico sul motore e/o sull'azionamento.
Il limite della coppia d'uscita ha superato la capacità dell'azionamento.
Controllare il carico meccanico, e che questo non sia inceppato o in
condizione di stallo. Nel caso di applicazioni in pompe, controllare che non vi
siano potenziali fattori di blocco della pompa. Nel caso di applicazione in
sistemi di ventilazione, controllare che il flusso d’aria per e dalla ventola non
sia ostruito.
La funzione di monitoraggio della corrente ha rilevato che il livello della
corrente si trova al di sotto dello standard necessario al normale
funzionamento dell’azionamento. Controllare che non vi siano interruzioni
di tipo meccanico che provochino perdita del carico (ad esempio, la rottura
della cinghia). Controllare che il motore non sia scollegato dall’azionamento.
Guasto all'uscita dell'azionamento, contattare il proprio Distributore
Autorizzato Invertek Drives.
Il valore della resistenza di statore varia tra le fasi. Assicurarsi che le fasi del
motore siano state opportunamente collegate e siano prive di guasti.
Controllare la corretta resistenza e bilanciamento delle bobine.
Il valore della resistenza di statore è troppo alto. Assicurarsi che le fasi del
motore siano state opportunamente collegate e siano prive di guasti.
Verificare che la taglia del motore corrisponda alla taglia dell'azionamento
collegato.
Il valore dell'induttanza del motore è troppo basso. Assicurarsi che le fasi del
motore siano state opportunamente collegate e prive di guasti.
Il valore dell'induttanza del motore è troppo alto. Assicurarsi che le fasi del
motore siano state opportunamente collegate e siano prive di guasti.
Verificare che la taglia del motore corrisponda alla taglia dell'azionamento
collegato.
I parametri misurati sul motore non sono coerenti:. Assicurarsi che le fasi del
motore siano state opportunamente collegate e siano prive di guasti.
Verificare che la taglia del motore corrisponda alla taglia dell'azionamento
collegato.
Non è stato ricevuto alcun telegramma Modbus valido nel tempo di
osservazione impostato in P5-05. Controllare che il master di rete / PLC sia
ancora in funzione. Controllare i cavi di collegamento. Aumentare il valore di
P5-05 fino ad un livello valido
Si è perduta la comunicazione interna per il modulo opzioni di
comunicazione. Controllare che il modulo sia stato correttamente inserito.
Si è perduta la comunicazione interna per il modulo opzioni di
comunicazione. Controllare che il modulo sia stato correttamente inserito.
19 Errore M/C
20
21
22
23
Parametri di default
utente
Sovratemperatura PTC
del motore
Guasto ventola
raffreddamento
Temperatura
ambientale elevata
Errore della memoria interna
Parametri di default
dell'utente
Sovratemperatura PTC del
motore
Guasto alla ventola di
raffreddamento
La temperatura ambientale è
troppo alta
24 Superamento limite
Errore di sovracorrente
25 Coppia d'uscita troppo
Errore di sottocorrente
massimo coppia
d'uscita
bassa
26
40
Errore uscita
azionamento
Fallimento autotune 1
Errore nell'uscita
dell'azionamento
41 Fallimento autotune 2
42 Fallimento autotune 3
43
Fallimento autotune 4
Fallimento della procedura di
autotune
44 Fallimento autotune 5
50 Errore comunicazione
Errore nella comunicazione
Modbus
52 Errore modulo opzioni
Errore nel modulo opzioni di
comunicazione
Blocco nella comunicazione
I/O della scheda
Modbus
53
comunicazione
Blocco comunicazione
I/O scheda
82-HVMAN-EL_V1.00
56
www.invertek.co.uk