Ingegneria e Tecnologie
dei
Sistemi di Controllo
Presentazione di un Progetto
d’Esame
Titolo
Progetto del Sistema di Controllo
di una Slitta Meccanica
azionata mediante
un Motore Elettrico in Continua
2
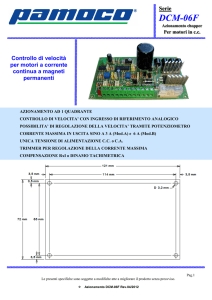
Descrizione
Motore DC
Amplific.
Switching
slitta
vite a ricircolazione di sfere
Schema a blocchi Simulink disponibili nella pagina web
del Prof. Rossi
Î
Azionamento DC da solo
Î
Sistema Completo
3
Dati
Valori Nominali
Rapporto riduzione: r = 10
R = 1 Ohm
L =25 mH
K = 1 Nm/A
Jm = 0.015 kgm2
M = 400kg
4
Dati
Incertezze
Non è detto che tutti i valori dell’impianto siano uguali a
quelli nominali…
Î
attenzione particolare ad R e L
Il sistema di conversione del moto da rotatorio a
traslatorio è stato modellato “nominalmente”con una
sola costante “r”
Î
equivale ad assumere rigidità infinita
Î
campo di validità?
5
Dati
Range Ammissibili per le variabili
Posizione Slitta: -1.25 - 1.25 m (fine corsa)
Î
Limitazione di corrente a 50A
Î
posizione iniziale slitta: 0
la corrente non deve superare questo valore per tempi troppo
lunghi altrimenti ci potrebbero essere problemi di temperatura
Î
intervento di protezioni sull’amplificatore switching
Î
non è una vera e propria saturazione
Tensione di alimentazione motore: -150 , 150V
Î
Î
saturazione dell’amplificatore
AMPLIFICATORE SWITCHING CON FREQUENZA PWM
SETTABILE ARBITRARIAMENTE NEL RANGE: 200Hz - 5kHz
6
Misure Disponibili
Modello Azionamento DC
Corrente di armatura
Velocità di rotazione del rotore
Modello Azionamento DC + riduttore/vite slitta
Corrente di armatura
Velocità del rotore
Posizione e velocità della slitta
7
Misure Disponibili
Ogni misura viene acquisita tramite
Î
Î
SENSORE + CATENA ACQUISIZIONE:
RANGE SENSORE FISSABILE ARBITRARIAMENTE
USCITA CATENA ACQ.: (-10, +10)V
FILTRO PRIMO ORDINE:
GUADAGNO STATICO UNITARIO
COSTANTE DI TEMPO FISSABILE ARBITRARIAMENTE
Tutte le misure sono affette da rumore sull’uscita
della catena di acquisizione
8
Input
Input di controllo per il sistema considerato:
percentuale di modulazione PWM (duty cycle)
Î
comando per l’amplificatore switching che alimenta il motore
elettrico
Î
Range del comando: 0 - 1
Î
Range di tensione: -150 - 150 V
Î
Corrispondenza lineare tra i due range:
z
0
→ -150V
z
1
→ 150V
z
0.5 →
0V
9
Specifiche
Moto tra 2 posizioni: -1.2 e 1.2 m
Tempo di fermata nelle due posizioni: 0.5s (circa)
Î
a partire da quando si entra in range ±1% della posizione finale
Minimizzare il tempo di transizione (compatibilmente con
i vincoli “fisici”) tra le due posizioni
Evitare l’urto contro i finecorsa
Î
attenzione all’overshoot
Posizione di partenza: 0 m
Î
inizializzazione
10
Generalità sul Progetto
Decidere quali misure utilizzare
Decidere i range dei sensori
Î
Decidere le costanti di tempo di filtraggio sulle misure
Î
attenzione al filtraggio del rumore
Decidere la struttura del controllo
Î
attenzione: il rumore è in tensione
tipicamente struttura in cascata per azionamenti elettrici
(analizzata in seguito)
Progetto Controllore tempocontinuo
Î
Controllore Feedback
Î
Generatore di traiettorie e azioni in avanti (FeedForward)
11
Generalità sul Progetto
Discretizzazione del Controllo Tempocontinuo
Î
SCELTA DEL TEMPO DI CAMPIONAMENTO
Î
SCELTA DELLA METODOLOGIA DI DISCRETIZZAZIONE
Scelta della Frequenza di PWM:
Î
Î
range 200Hz - 5kHz
Attenzione: non è prevista sincronizzazione tra PWM e
campionamento. (chiarito in seguito)
12
Consigli
Azionamento
Î
Î
Î
Costruirsi modello e controllo dell’azionamento con parametri
nominali
Confronto con azionamento “reale”
Aggiustare se necessario i parametri del regolatore, magari
identificando i parametri “veri” dell’azionamento
Considerare il sistema complessivo dopo aver realizzato
il controllo dell’azionamento
13
Consigli
ATTENZIONE:
IL PROBLEMA NON E’ MOLTO DIFFICILE
Î
Non ci dovrebbe volere troppo tempo per risolverlo
NON SERVE OTTENERE PRESTAZIONI
“STRAORDINARIE”
Î
Importante portare un progetto con SCELTE MOTIVATE
RELAZIONI SINTETICHE
Î
Punti chiave
14
Ingegneria e Tecnologie
dei
Sistemi di Controllo
Presentazione di un Progetto
d’Esame
FINE