Capitolo 1
INTRODUZIONE
Il ruolo fondamentale di un centro di controllo, è quello di soddisfare l’esigenza di tenere sotto
controllo un determinato processo industriale, grande o piccolo che sia.
Nel caso più semplice il processo è equipaggiato con vari tipi di dispositivi di misura (sensori),
che svolgono la funzione di monitoraggio, e da dispositivi di esecuzione per il controllo
(attuatori). Usando questi strumenti gli operatori del centro devono essere in grado di
controllare il processo di cui essi sono responsabili.
Quando un processo richiede parecchi sensori e attuatori, è naturale che essi vengano
raggruppati in un unico pannello di controllo, talora indicato come “mimic board”.
In questo modo l’operatore può ottenere un’immagine dello stato del processo da una o più
postazioni di lavoro. Nel caso in cui vengano coinvolti grandi processi, è importante riuscire ad
ottenere una buona visione d’insieme dell’evento da un’unica posizione di regia. Questa è la
ragione per cui vengono costruiti i centri di controllo, dai quali il processo può essere
interamente osservato e controllato.
Per processi estesi geograficamente, questi centri di controllo sono necessariamente localizzati
in edifici separati dall’impianto controllato.
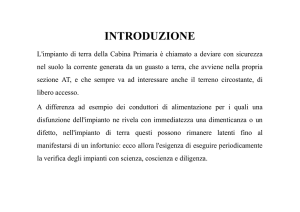
Una stanza di controllo tradizionale è rappresentata in Fig. 1.1: essa consiste di un pannello di
controllo su cui è schematizzato un modello del processo e da varie postazioni di lavoro per gli
operatori. Le dimensioni del pannello di controllo sono direttamente proporzionali alle
dimensioni e alla complessità del processo da controllare.
In passato, pannelli di controllo in marmo con strumenti di ottone costituivano la regola
piuttosto che l’eccezione ed erano fabbricati con grande abilità e cura riportando ogni aspetto
del processo da controllare. Tutte le volte
che il processo veniva sostanzialmente
modificato, si rendeva però necessario
aggiornare il pannello di controllo. Per
processi in continua evoluzione come sono
le reti elettriche di trasmissione,
l’aggiornamento del pannello è diventato
una procedura complessa e costosa. Nuove
linee e nuove stazioni vengono costruite e
aggiunte alla rete. In conseguenza di ciò i
pannelli di controllo diventano complessi,
la visione d’insieme diventa problematica e
Figura 1.1 Tradizionale stanza di controllo con pannello
questo determina un impatto negativo
di controllo
sull’efficienza
delle
funzioni
di
monitoraggio e controllo.
Per superare le limitazioni imposte da questa tecnologia costosa e poco flessibile la tecnologia
informatica si è proposta come valida alternativa all’impiego dei pannelli di controllo. Quando,
intorno al 1960, i prezzi dei computer sono diventati accessibili per l’industria elettrica, essi
sono stati immediatamente integrati nel progetto dei nuovi centri di controllo. In questo contesto
il computer elabora tutti i segnali e le misure, visualizzandoli sul video della postazione di
lavoro dell’operatore; il video-terminale ha dunque rimpiazzato i vecchi pannelli di controllo.
In questo modo si sono evoluti i moderni centri di controllo che hanno il loro punto di forza
proprio nella flessibilità di esercizio.
Molti dei centri di controllo odierni, che possono contare sulle tecniche di visualizzazione più
moderne, presentano ancora i pannelli di controllo, ma questi ultimi si presentano in una forma
molto più stilizzata che in passato. Essi offrono un mezzo per acquisire rapidamente una visione
d’insieme del processo e, secondo il parere di alcuni operatori, rappresentano una forma di
decorazione per la stessa sala controllo.
Occorre tenere presente che il processo energetico è geograficamente esteso ed interconnesso in
modo da coprire intere nazioni o addirittura continenti. Questo fatto ha spinto le compagnie
elettriche a far uso di centri di controllo e supervisione fin dai primordi della loro attività, per
permettere il controllo remoto di attività localizzate in luoghi distanti dal centro.
Il progetto di un sistema di supervisione e controllo deve coniugare la complessità di un evoluto
sistema informatico con la complessità del processo da controllare. L’insieme della produzione,
trasmissione e distribuzione dell’energia elettrica costituisce forse il processo industriale più
avanzato nella moderna società industriale. Applicare ad esso i più sofisticati sistemi di
controllo computerizzati costituisce ancor oggi una sfida, in particolar modo dal punto di vista
della vasta distribuzione geografica. Non deve quindi sorprendere che i mezzi di controllo usati
per l’industria elettrica, siano tecnicamente più avanzati di quelli utilizzati per altri processi
industriali.
Gli odierni sistemi di controllo consistono di elaboratori di differente complessità, operanti in
tempo reale. Essi sono spesso organizzati in modo da formare strutture gerarchiche che
rispondono meglio alle diverse esigenze. L’ampiezza geografica del sistema pone inoltre al
sistema di elaboratori del sistema di controllo pressanti esigenze di comunicazione dei dati.
Il ruolo degli operatori è quello di tenere sotto costante osservazione il sistema elettrico, usando
un’interfaccia di comunicazione con i computer del centro che consiste di video-terminali e
tastiere. Il video mostra ciò che avviene nella rete in modo rapido, accurato e facilmente
comprensibile.
1.1 Tecnologia attuale
La necessità di far fronte a complesse esigenze di controllo, ha fatto sì che l’industria elettrica si
dotasse di strumenti efficienti per assicurare la fornitura di energia elettrica con le desiderate
2
garanzie di qualità e disponibilità, a prezzi contenuti. La supervisione centralizzata fornisce una
visione d’insieme totale dello stato attuale del sistema elettrico. Per svolgere tutte le funzioni
precedentemente descritte e quindi consentire il controllo della rete elettrica, devono essere
acquisite dagli operatori del sistema misure e segnalazioni tali da assicurare l’osservabilità di
ogni impianto. In particolare devono essere supportate le funzioni essenziali di gestione del
sistema elettrico, quali ad esempio la stima dello stato, i bilanci, il computo della riserva e delle
perdite, secondo quanto verrà definito più avanti. Le informazioni acquisite dagli impianti sono
poi elaborate dai vari programmi applicativi residenti nel sistema di controllo, sia in linea sia
fuori linea, aventi lo scopo di svolgere e verificare tutte le attività di controllo di pertinenza
degli operatori.
Le informazioni devono inoltre essere rese disponibili in maniera perfettamente compatibile con
il Sistema di Controllo del Gestore, senza riduzione delle sue prestazioni globali.
I computer del centro di controllo supervisionano lo stato attuale del sistema, segnalano
situazioni di allarme all’operatore quando si verificano deviazioni dallo stato normale, come ad
esempio operazioni di interruzione non preventivate oppure flussi di potenza attraverso le linee
che ne superano il limite operativo.
Gli allarmi sono solitamente raggruppati in modo selettivo per aiutare ulteriormente gli
operatori nella ricerca rapida delle cause dell’inconveniente. I più grandi centri di controllo
impiegano strumenti avanzati di analisi e simulazione di reti elettriche per aiutare gli operatori a
prevenire i disturbi.
Anche programmi di controllo della produzione fanno di solito parte della dotazione software di
un centro di controllo; essi ottimizzano economicamente le operazioni dei sistemi di energia.
Il controllo centralizzato del sistema elettrico permette di riunire in un’unica postazione tutte le
azioni necessarie di configurazione e controllo della rete. Gli operatori possono operare
interruzioni agendo sugli interruttori delle stazioni e sottostazioni elettriche e controllare le
unità di generazione in servizio.
Il ruolo degli operatori ha subito grandi mutazioni da quando sono stati introdotti i sistemi di
controllo computerizzati. Nei primi tempi il loro compito principale consisteva
nell’archiviazione di dati e nella registrazione di eventi; ora le loro mansioni hanno un carattere
maggiormente analitico.
Il sistema computerizzato provvede automaticamente alla registrazione dei dati, li elabora e
presenta agli operatori informazioni di contenuto più ricco che permettono loro di preparare
operazioni di controllo coordinate secondo una strategia preordinata; tali operazioni sono poi
eseguite di nuovo mediante il sistema computerizzato. Il nuovo ruolo degli operatori impone
quindi notevoli requisiti all’interfaccia tra il sistema di controllo e l’utente umano.
I requisiti funzionali del sistema di controllo a disposizione delle industrie elettriche sono vasti,
ma differiscono, quanto a complessità, a seconda all’area di applicazione. Negli impianti sono
presenti alcuni apparati che svolgono le funzioni di acquisizione delle informazioni necessarie
3
per tutti i processi di controllo e di difesa, nonché di restituzione dei telecomandi di competenza
degli operatori e dei livelli di regolazione verso gli attuatori.
I requisiti funzionali più importanti includono sempre la cosiddetta funzione di “acquisizione
dati, supervisione e controllo”, nota anche come SCADA (dall’inglese “Supervisory Control
And Data Acquisition”) e la funzione di “gestione dell’energia” o EMS (dall’inglese “Energy
Management System”) che comprende procedure di calcolo orientate all’analisi e simulazione
dei sistemi elettrici.
Per quanto riguarda i requisiti funzionali, va ricordato che il sistema di controllo deve risultare:
gerarchico, distribuito e affidabile.
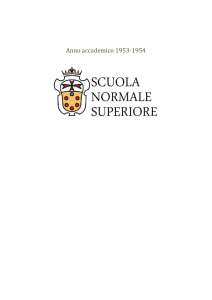
Il requisito di possedere una struttura gerarchica è una conseguenza naturale
dell’organizzazione dell’industria elettrica in cui le decisioni del centro giungono alla periferia
del sistema attraverso numerosi stadi organizzativi (vedi Fig. 1.2).
Il requisito di avere un sistema di controllo distribuito è motivato dal fatto che il sistema
elettrico è geograficamente esteso sopra un’area molto vasta.
Infine gli oneri economici e sociali derivanti da un non corretto funzionamento del sistema di
controllo sono così elevati da giustificare i severi requisiti in merito alla sua affidabilità e
sicurezza.
Esistono oggi una serie di dispositivi (sostanzialmente computer e sistemi informatici per
Figura 1.2 Il sistema di controllo deve essere adatto alla diffusione geografica e alla struttura gerarchica del
sistema elettrico
4
l’acquisizione di dati in tempo reale) in grado di soddisfare le esigenze della supervisione e
controllo dei sistemi elettrici.
Una lista anche approssimativa dei centri di supervisione e controllo operativi oggi nel mondo
sarebbe necessariamente molto lunga.
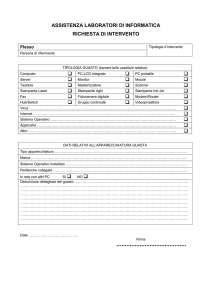
Solo a titolo d’esempio viene mostrato qui il sistema nazionale di controllo e monitoraggio
della rete elettrica di trasmissione di un paese in via di sviluppo, di recente messa in servizio.
Come si può vedere dalla Fig. 1.3, questo è un esempio di sistema di controllo gerarchico.
Il paese è diviso in tre regioni operative: il nord, il centro e il sud. Ogni regione ha un suo centro
di controllo, esso è responsabile di ciò che accade nell’area di sua competenza. I centri di
controllo regionali formano, insieme con il centro di controllo nazionale, un sistema gerarchico,
nel quale il centro nazionale è responsabile di coordinare e pianificare le operazioni. Ogni
regione ha un suo sistema di controllo al quale sono associate unità di controllo terminali. Il
sistema di controllo della regione centrale assume in questo caso le funzioni del centro di
controllo nazionale e comunica con gli altri sistemi. In caso di necessità, la funzione di centro
nazionale può essere affidata ad uno degli altri due centri regionali.
Figura 1.3. Schema del sistema di controllo e monitoraggio per la generazione di energia e la rete ad alta
tensione di un paese in via di sviluppo
5
Capitolo 2
ESIGENZE DI CONTROLLO PER I SISTEMI ELETTRICI
DI ENERGIA
Per far fronte ad esigenze di controllo sempre più complesse, le industrie elettriche necessitano
di strumenti efficienti atti a garantire le caratteristiche desiderate di qualità a costi competitivi
dell’energia elettrica. L’obiettivo principale del controllo, sia a breve che a lunga scadenza, è
quello di trovare il miglior compromesso tra le esigenze di sicurezza e di economia d’esercizio.
Questo vuol dire che le azioni di controllo possono essere caratterizzate da tre obiettivi
indipendenti e talora contrastanti: qualità, sicurezza ed economia.
¾ Qualità: è normalmente definita sotto forma di un profilo accettabile per la tensione
(intesa come intervallo ammissibile e assenza di flicker) e per la frequenza elettrica
(intesa come valore nominale con una stretta banda di regolazione e una soglia per
l’errore di tempo).
¾ Sicurezza: è molto più difficile da descrivere in termini quantitativi. Di solito esistono
regole che riguardano il bilancio delle potenze nei sistemi elettrici, i livelli di carico di
linee e trasformatori e così via. Esse hanno lo scopo di prevenire eventuali disturbi
ritenuti probabili.
¾ Economia: fa riferimento a costi d’investimento sulle apparecchiature, i sistemi di
controllo ecc., e i costi variabili legati all’esercizio per l’intero sistema elettrico di
potenza.
Non esiste una soluzione ideale in grado di combinare i tre obiettivi sopra menzionati nel modo
migliore. Inoltre gli obiettivi di sicurezza ed economia sono in contrasto tra loro, in quanto per
garantire ragionevoli livelli per ciascuno dei tre obiettivi, è ormai obbligatorio impiegare sistemi
di controllo avanzati e quindi abbastanza costosi.
Per comprendere pienamente lo sviluppo della tecnologia dei centri di controllo è necessario
riflettere brevemente sui compiti delle industrie elettriche. Questo capitolo è quindi dedicato
alla descrizione degli obiettivi e delle funzioni svolte, attraverso la pianificazione a breve
termine e la gestione giornaliera.
Anche le necessità organizzative e le attività di un centro di controllo sono brevemente discusse.
Gli aspetti relativi all’investimento di risorse economiche in un sistema di controllo
computerizzato verranno pure brevemente esaminati.
Infine sono fornite alcune osservazioni generali sulla base dell’esperienza operativa di molti
centri di controllo.
6
2.1 Stati operativi di un sistema elettrico
Non c’è un unico modo per descrivere le condizioni operative di un sistema elettrico di energia,
dal momento che ciascun sistema ha caratteristiche proprie per quanto riguarda la produzione,
la trasmissione, la distribuzione e i carichi. Le peculiarità del sistema e dei vincoli di natura
fisica e legale, impongono restrizioni anche molto differenti da un caso all’altro. Inoltre le
attività in un centro di controllo seguono regole severe sviluppate da ciascuna industria elettrica.
Gli aspetti operativi che influenzano direttamente il centro di controllo possono essere divisi in
tre gruppi che riflettono i differenti orizzonti temporali di competenza:
1)
pianificazione a breve termine delle operazioni, da poche ore fino a pochi mesi. Le
operazioni pianificate riguardano sia l’utilizzazione delle risorse di produzione che le
previsioni del carico, come pure la preparazione del personale a fronteggiare potenziali
fuori-servizio di parti del sistema;
2)
controllo in tempo reale. Questa funzione implica il monitoraggio della produzione, dei
carichi e delle tensioni, la verifica di eventuali violazioni dei livelli di sicurezza e azioni di
controllo sul sistema in risposta ad eventuali guasti di protezione;
3)
archiviazione delle operazioni e registrazione di disturbi. Queste operazioni hanno lo
scopo di collezionare dati statistici del funzionamento del sistema, per scopi contabili e in
modo da pianificare al meglio gli interventi. La registrazione dei disturbi permette di
localizzarli e facilita un veloce ripristino del normale funzionamento.
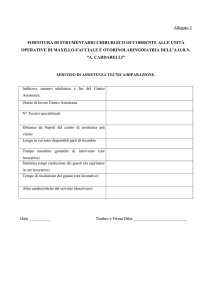
E’ noto che il funzionamento di un sistema elettrico può essere caratterizzato da uno dei quattro
modi o stati operativi mostrati in Fig. 2.1: più precisamente
• lo stato normale;
• lo stato di allerta;
• lo stato d’emergenza;
• lo stato ristorativo.
Lo scopo generale delle operazioni svolte dal centro di controllo è quello di mantenere il
sistema il più a lungo possibile nello stato normale. Questo è ottenuto individuando
tempestivamente ogni possibile evento che porterebbe il sistema in stato di allerta e mettendo in
gioco le opportune azioni di controllo per riportarlo il più presto possibile nello stato normale.
Se il sistema energetico collassa (cioè se si verifica un black-out) la ripresa di carico in fase
ristorativa deve essere graduale, ma comunque abbastanza rapida.
Si considerino ora le funzioni di pianificazione delle operazioni e di preparazione dei rapporti
per i sistemi elettrici. La pianificazione delle operazioni in un centro di controllo viene
principalmente svolta a breve termine (ogni giorno per il successivo). L’obiettivo è quello di
minimizzare il costo di produzione mediante la programmazione delle generazioni tenendo
conto del carico previsto e della programmazione delle unità di generazione in servizio. Anche
lo scambio di potenza con altri produttori di energia elettrica viene considerato in questa sede.
7
Figura 2.1 I quattro Stati Operativi
Il carico previsto è normalmente calcolato dapprima su base annuale ed è poi riportato per
intervalli di tempo più brevi. Quindi la funzione di previsione del carico implica l’esame di un
gran numero di fonti di informazioni, per esempio relative all’andamento della produzione
industriale, del terziario, contatti con società locali di distribuzione e grandi consumatori,
nonché le previsioni del tempo.
La minimizzazione del costo di produzione di un sistema è altamente dipendente dalle risorse
energetiche disponibili e dal tipo di impianti di generazione disponibili (idroelettrici,
termoelettrici o nucleari). Per un sistema di produzione interamente termoelettrico, la spesa di
produzione è soprattutto funzione dell’efficienza degli impianti e del costo del combustibile
purché quest’ultimo sia disponibile.
In un sistema di produzione misto con maggioranza di generazione idroelettrica,
l’ottimizzazione delle risorse è molto complicata. Il costo del combustibile per l’energia
idroelettrica è sostanzialmente nullo. Il problema è che la fornitura d’acqua è limitata e incerta
sia in volume che per quanto riguarda la sua distribuzione nel tempo, a causa delle
imprevedibilità delle precipitazioni. Inoltre, una volta che un certo volume d’acqua ha raggiunto
un bacino idrico, bisogna decidere quando esso verrà usato per produrre energia elettrica. Il
costo minimo per un sistema misto viene ottenuto utilizzando tutte le risorse idriche e,
conseguentemente, con il minimo ricorso alla generazione termoelettrica.
La minimizzazione dei costi deve però tener conto di una varietà di limitazioni relative a:
• ubicazione dei carichi nella rete;
• programmi di manutenzione;
• restrizioni delle capacità di generazione;
• piani di scambio energetico;
8
• disponibilità di impianti e unità;
• variazioni del costo del combustibile e sua disponibilità;
• previsioni dell’afflusso d’acqua;
• restrizioni legali e ambientali;
• necessità di regolazione, lenta o veloce.
2.1.1 Cooperazione tra industrie elettriche
La cooperazione tra industrie elettriche in un sistema interconnesso sta diventando sempre più
comune. La cooperazione porta immensi vantaggi economici in termini di migliore stabilità,
disponibilità di un maggior numero di impianti di produzione, mantenimento di un livello
adeguato di generazione di riserva. Tale cooperazione rende tuttavia indispensabile
l’acquisizione in tempo reale, presso il centro di controllo, della misura della potenza scambiata
attraverso le linee di interconnessione.
2.1.2 Controllo in tempo reale
L’obiettivo principale del controllo del sistema elettrico è quello di assicurare, istante per
istante, la copertura del fabbisogno, ottemperando ai requisiti predefiniti di qualità e continuità
del servizio.
Per quanto riguarda il controllo in tempo reale, le funzioni di monitoraggio e di controllo
possono essere suddivise in due parti:
1)
2)
bilancio istantaneo della potenza attiva e controllo della frequenza;
valutazione della capacità del sistema di trasmissione con riferimento al controllo dei
limiti di transito di corrente lungo le linee e ai livelli delle tensioni.
La potenza elettrica richiesta dai consumatori (il carico) deve essere prodotta nel momento
stesso in cui è utilizzata. Una variazione del carico deve quindi essere seguita immediatamente
da un adeguamento della generazione o si avrà uno squilibrio nel bilancio delle potenze del
sistema. Nel caso in cui il carico aumenta senza che abbia luogo alcuna azione di controllo per
aumentare la produzione, il deficit di potenza andrà a carico dell’energia cinetica delle masse
rotanti delle macchine e la frequenza tenderà a scendere. E’ quindi necessario un incremento di
produzione per sostenere la frequenza. L’uguaglianza tra carico e generazione è una condizione
necessaria per il funzionamento stabile e la variazione della frequenza dal suo valore nominale è
una misura dello squilibrio. Un sistema di potenza interconnesso può far fronte nel modo
migliore alle variazioni casuali del carico in uno dei differenti sottosistemi dal momento che la
maggior parte di tali variazioni tende a compensarsi automaticamente. Tuttavia ci sarà sempre
uno squilibrio tra i valori effettivi e quelli pianificati per il sistema carico-generazione; perciò, il
9
centro di controllo, ha il compito di mantenere il bilancio della potenza e la frequenza al livello
di qualità desiderata.
La rete elettrica ad alta tensione permette la trasmissione di energia dagli impianti di
generazione ai consumatori. Generalmente la capacità complessiva di trasmissione di una rete è
determinata dalle caratteristiche di stabilità del sistema e dai limiti fisici sul transito di corrente
attraverso le linee di trasmissione. Le funzioni di un centro di controllo consistono quindi nel
tenere sotto controllo i limiti di transito di potenza preparando il sistema a resistere a possibili
situazioni di fuori servizio. Per questo motivo, ogni industria elettrica normalmente stabilisce
propri criteri e standard operativi.
Per esempio, il sistema elettrico dovrebbe resistere a:
• fuori-servizio improvviso di un generatore;
• fuori-servizio di una linea di trasmissione o di un trasformatore;
• guasti di tipo transitorio.
In una situazione di fuori-servizio il centro di controllo deve essere preparato a intraprendere
appropriate azioni per modificare la produzione e/o ridisegnare la topologia della rete di
trasmissione in seguito all’intervento dei dispositivi di protezione.
Un requisito fondamentale dell’esercizio della rete di trasmissione è che il sistema possa
mantenere il livello desiderato di tensione in diverse condizioni operative. Lo strumento
principale per una regolazione stabile della tensione è il sistema di eccitazione delle macchine
sincrone. Lo scopo del controllo è quello di garantire che ci sia sufficiente margine di
eccitazione in entrambe le direzioni. I margini di eccitazione sono espressi in termini del valore
di potenza reattiva di riserva disponibile. Nel caso di un disturbo della rete, la potenza reattiva
di supporto deve essere disponibile nella stessa area del sistema dove è avvenuto il disturbo. Le
stesse considerazioni valgono per le variazioni del carico reattivo assorbito dai consumatori. Per
questo motivo vengono impiegati anche i trasformatori con rapporto variabile e dispositivi
elettronici come gli SVC (“Static Var Compensator”), dislocati in posizioni strategiche della
rete.
Il centro di controllo ha il compito di mantenere adeguato il livello della tensione in tutta la rete,
mediante un monitoraggio continuo e attivando o disattivando opportunamente i dispositivi di
compensazione.
La sorveglianza continua delle connessioni degli elementi di rete (posizione degli organi di
manovra) e dei dati dinamici degli impianti (misure di potenza, di frequenza e di tensione)
consente agli operatori di attuare tutte le azioni di controllo necessarie al fine di conseguire gli
obiettivi sotto elencati:
• Verifica della disponibilità dei componenti del sistema elettrico: l’operatore di sala
controllo verifica le prestazioni dei gruppi di generazione rispetto al programma di produzione
10
previsto e, tenendo conto di eventuali avarie verificatesi sul sistema elettrico, definisce gli
assetti di rete opportuni.
• Verifica della sicurezza: per garantire un adeguato livello di sicurezza nel servizio ed
individuare eventuali aree critiche, l’operatore di sala controllo esegue simulazioni in regime
stazionario e/o dinamico di guasti ritenuti particolarmente probabili (es. guasti causati da
fulminazioni). Nel caso in cui il guasto ipotizzato sia di gravità tale da portare il sistema in uno
stato vulnerabile (per esempio, se sono presenti componenti in sovraccarico) o in emergenza
(perdita di qualche componente, disalimentazioni, separazione di rete) l’operatore interviene
immediatamente sul sistema per ricondurlo in condizioni di funzionamento in “Sicurezza N-1”.
• Regolazione della frequenza e controllo dell’interconnessione con l’estero: l’operatore,
utilizzando la funzione di regolazione frequenza-potenza, mantiene la deviazione fra scambio di
energia programmato con gli altri paesi europei e scambio reale ai valori più bassi possibili, e
comunque entro i limiti stabiliti dalle regole UCTE. In caso di separazione della rete italiana
dall’estero questa funzione garantisce il mantenimento della frequenza di rete al valore
programmato.
• Regolazione della tensione: per il controllo dei profili di tensione l’operatore utilizza la
funzione di regolazione di tensione del sistema di controllo. E’ definito, inoltre, un piano per la
gestione coordinata di inserzione e disinserzione delle batterie di condensatori e dei reattori in
derivazione. Qualora i provvedimenti e le risorse disponibili non assicurino un regime di
tensione soddisfacente si procede alla variazione dell’entità del parco generatori in servizio e, se
necessario, anche a variazioni topologiche della rete al fine di variare l’apporto di potenza
reattiva da parte della rete.
• Gestione dei piani di difesa e di riaccensione: in occasione di un incidente generalizzato
o di grande estensione, l’intervento dei dispositivi automatici o manuali previsti nei piani di
difesa del sistema elettrico ha l’obiettivo di ridurre l’entità del disservizio. Se, malgrado questi
interventi, il sistema elettrico dovesse evolvere in uno stato di black-out esteso, l’operatore
dispone l’attivazione del piano di riaccensione del sistema elettrico o, in alternativa, dirige tutte
le manovre da effettuare per riportare il sistema elettrico in condizioni di normale
funzionamento.
Nel seguito verranno esaminate le caratteristiche salienti del centro di controllo computerizzato
con riferimento al modo in cui i sopramenzionati compiti di controllo sono incorporati nel suo
progetto.
Le funzioni di un centro di controllo spesso servono a soddisfare i requisiti sia di sicurezza che
di economia, almeno nello stato normale. Nello stato di allerta lo scopo è di impedire una
separazione della rete, per cui l’aspetto della sicurezza del sistema diventa preminente. Nello
stato ristorativo lo scopo è quello di riportare il sistema elettrico nello stato normale il più in
fretta possibile, prendendo in considerazione sia gli aspetti di sicurezza che di economia. Infine
nello stato di emergenza tutti i sistemi di controllo centralizzato vengono fatti funzionare solo
11
mirando all’aspetto della sicurezza. La supervisione centralizzata fornisce una visione completa
dello stato effettivo del sistema elettrico rendendo possibile il mantenimento dello stato
operativo normale. Qualunque scostamento dalle condizioni normalmente pianificate è
automaticamente identificato e riportato agli operatori. Essi possono avviare azioni di controllo
intese a impedire che un guasto si propaghi a cascata in tutta la rete oppure a modificare
condizioni di funzionamento non economiche. La supervisione d’insieme è tesa a minimizzare
le conseguenze di una parziale interruzione del servizio sfruttando al meglio il sistema di
produzione e trasmissione.
I più grandi centri di controllo dispongono di strumenti avanzati di supervisione, analisi e
simulazione che assistono gli operatori nel compito di prevenire, se possibile, i disturbi. Questi
centri usualmente utilizzano tecniche di ottimizzazione per il controllo della produzione e per la
pianificazione, mettendo in conto costi e perdite di potenza. Il controllo centralizzato, grazie
alla funzione di SCADA, permette di intervenire su tutto il sistema elettrico da una sola
postazione. Operazioni sicure e veloci possono perciò essere attuate sia nello stato normale sia
nello stato ristorativo abbreviando la durata dei disservizi. In questo contesto il controllo
consiste nel comando a distanza degli interruttori. Tutte le parti del sistema possono essere
selettivamente interrotte per consentire all’operatore di localizzare la causa del disturbo e di
impedirne la propagazione. In aggiunta, i dati delle interruzioni sono raccolti in opportuni
archivi per consentire agli operatori una dettagliata analisi a posteriori. Oggi i centri di controllo
computerizzati possono spesso contenere funzioni per raccogliere dati statistici e rapporti sulle
operazioni eseguite; queste ultime sono stampate direttamente o trasferite ad altri sistemi
computerizzati per mezzo di un nastro magnetico o direttamente con un collegamento tramite
computer. I vantaggi di queste integrazioni sono quelli di avere attendibili informazioni
statistiche e alleggerire l’operatore da lavoro di routine.
2.2 Organizzazione e attività degli operatori
La responsabilità delle operazioni del sistema elettrico e del mantenimento della sicurezza del
personale è normalmente assegnata al centro di controllo. A causa dell’interconnessione dei
sistemi e della più stretta collaborazione tra gli operatori dei diversi sistemi elettrici, questa
responsabilità viene ad essere in qualche modo suddivisa tra differenti centri di controllo.
Questa suddivisione di compiti ha luogo anche all’interno del centro stesso, dal momento che
un numero sempre maggiore di funzioni è svolta dai computer del centro e sempre più persone
traggono vantaggio da queste funzioni per il loro lavoro. Tale situazione richiede una chiara
suddivisione delle responsabilità e delle attività che sono svolte presso il centro. In questo modo
operano i centri di controllo gerarchici con le loro differenti strutture operative.
Le molte attività di un centro di controllo sono, come precedentemente accennato:
• controllo della produzione;
• definizione del sistema di trasmissione;
12
• organizzazione della manutenzione;
• simulazione di fuori-servizio e addestramento degli operatori;
• supervisione del sistema di controllo.
Le prime tre attività sono quelle che tradizionalmente e logicamente hanno la massima priorità.
Le due attività che seguono sono state introdotte dall’impiego del computer, ma sono tuttavia
cruciali.
Inoltre, le attività degli operatori possono essere organizzate in tre gruppi, ciascuno dipendente
dal particolare orizzonte temporale a cui fa riferimento: pre-dispacciamento, dispacciamento e
post-dispacciamento.
Le attività di pre-dispacciamento sono destinate a sviluppare il piano delle generazione a breve
termine, cioè dall’ora presente alle ore successive della giornata.
Le attività incluse sono:
previsione del carico a brevissimo termine;
dispacciamento delle generazioni;
pianificazione dell’interscambio;
pianificazione del carico e della potenza reattiva;
pianificazione delle operazioni di manutenzione;
sviluppo di operazioni di interruzione pianificate;
elaborazione di piani per il ripristino del servizio dopo i disturbi.
Le attività di dispacciamento realizzano i piani sviluppati nella fase di pre-dispacciamento e
controllano il sistema per far fronte alle necessità effettive che si manifestano in esso per
l’intervallo di tempo attuale (di solito 1 ora).
Queste attività normalmente includono:
• monitoraggio del sistema di potenza, del suo equipaggiamento e del suo stato operativo;
• dispacciamento della potenza per ottimizzare i costi di produzione e per realizzare il
bilancio tra la generazione e il carico;
• negoziazione degli interscambi e valutazione degli aspetti economici e di sicurezza
derivanti;
• operazioni di interruzione pianificate oppure conseguenti a disturbi.
Le attività di post-dispacciamento analizzano ed elaborano le informazioni raccolte durante il
periodo di dispacciamento per soddisfare i requisiti di archiviazione dei dati e identificare i
fuori-servizio fra gli effettivi disturbi. Queste attività migliorano la pianificazione e l’esercizio
dei sistemi elettrici.
Fra le attività svolte troviamo:
• memorizzazione di eventi e dell’attività degli operatori;
• raccolta di dati statistici;
• preparazione di rapporti sulla generazione di potenza;
• preparazione di bilanci di energia;
13
• analisi dei disturbi.
Il sottosistema di comunicazione uomo-macchina di un centro di controllo computerizzato
costruisce l’interfaccia operativa verso il sistema di potenza e il suo funzionamento. Un profilo
concettuale si trova in Fig. 2.2.
Stando a quanto visto finora, l’efficienza del sottosistema di interfaccia è di fondamentale
importanza per il funzionamento del centro di controllo e deve possedere importanti requisiti
come la qualità, la funzionalità e la versatilità.
2.3 Fattori economici relativi all’investimento
L’investimento in un sistema di controllo computerizzato implica un gran numero di fonti di
spesa al di là dell’acquisto dell’equipaggiamento di base. Fra questi costi possiamo, per
esempio, menzionare l’investimento per i sistemi ausiliari (alimentazione di potenza, impianto
di condizionamento, sistema di comunicazioni), adattamento del sistema di potenza alla
tecnologia del centro, operazioni di manutenzione, mantenimento di pezzi di ricambio e costi di
ampliamento del sistema durante tutta la sua vita.
Può risultare interessante valutare il costo complessivo del sistema di controllo, relativo
all’intera durata di vita del centro, per paragonarlo con i benefici che questa tecnologia
introduce. A causa del fatto che i requisiti di economia e di sicurezza sono contrastanti, una
grande varietà di metodologie sono state sviluppate nell’analisi dei costi-benefici di un centro di
controllo automatizzato.
Figura 2.2 Attività operative, piani concettuali
14
Non esistono quindi metodologie generali per valutare il valore economico o meglio le riduzioni
di spesa prodotte dal sistema di controllo. Generalmente ogni industria elettrica sviluppa una
propria tecnica di valutazione. In ogni caso, si possono identificare alcuni fattori comuni.
Fondamentalmente, i benefici derivanti dall’installazione di un sistema di controllo
computerizzato possono essere divisi in tre categorie:
a. razionalizzazione dell’esercizio;
b. migliore efficienza economica del sistema;
c. migliore affidabilità del sistema elettrico.
I benefici relativi alla prima categoria sono facilmente quantificabili economicamente e possono
da soli giustificare l’investimento di base. Il nuovo sistema impone un mutamento
nell’organizzazione sia dell’esercizio che della manutenzione, per esempio procedendo verso la
gestione remota di stazioni e sottostazioni elettriche non presidiate. Questi cambiamenti spesso
comportano riduzione del personale e costi di manodopera. In molti paesi c’è mancanza di
personale qualificato e ciò giustifica le spese d’investimento, le quali si possono misurare in
termini economici.
I benefici della seconda categoria sono generalmente facili da stimare e conseguentemente è
possibile assegnare a loro un valore. L’ottimizzazione economica delle risorse produttive è
sempre stata di grande interesse e sia la pianificazione dell’esercizio sia l’ottimizzazione della
produzione in tempo reale sono ora incluse tra le funzioni di un centro di controllo
automatizzato.
Una significativa analisi dei costi-benefici può essere svolta per quanto riguarda gli effetti sulla
razionalizzazione dell’esercizio e sull’economia delle operazioni. Questa analisi può includere i
miglioramenti economici nel dispacciamento e nella previsione dei carichi. Tuttavia gli
investimenti nel sistema di controllo non sono orientati esclusivamente al conseguimento di
vantaggi di natura economica e, per questo motivo, l’analisi costi-benefici deve comprendere
anche il criterio dell’affidabilità e sicurezza dell’esercizio.
L’investimento orientato alla sicurezza è spesso considerato come una forma di assicurazione
contro i black-out nei sistemi elettrici. Se una industria elettrica ha sperimentato un grande
black-out, un’analisi dei costi di investimento nelle funzioni orientate alla sicurezza è pressoché
inutile. In caso contrario la giustificazione della spesa richiede qualche altro dettaglio.
Esistono inoltre due approcci per la valutazione dell’investimento dal punto di vista della
sicurezza; ciascuno di essi basa la sua valutazione sull’aumento dell’affidabilità del sistema e su
i costi di interruzione.
La stima dei costi di interruzione deriva da costi diretti, come per esempio il costo del kWh non
fornito e da costi indiretti per la società dovuti ad una disalimentazione del carico totale o
parziale. I costi indiretti sono di solito più grandi dei costi diretti, però entrambi questi costi
sono in realtà difficili da dedurre e quindi ciascuna società prevede una propria linea di
condotta.
L’introduzione dei centri di controllo automatizzati permette una riduzione dei tempi di
15
disservizio tra il 20% e il 50%.
Il complesso di queste valutazioni e la considerazione di eventuali alternative nel progetto e
nell’esercizio dei sistemi elettrici di energia porta ad affermare che l’investimento in un centro
di controllo computerizzato rappresenta una spesa alquanto giustificata.
2.4 Esperienza dei centri di controllo
Un grande numero di centri di controllo computerizzati sono stati introdotti in tutto il mondo
durante l’ultimo trentennio. Viste da una prospettiva globale queste realizzazioni sono state
spesso una sfida per le industrie elettriche. Questi nuovi strumenti spesso impongono nuove
procedure di pianificazione e di esercizio. Oltre a ciò, i nuovi sistemi computerizzati richiedono
un tipo di manutenzione al quale il personale addetto non è abituato. Inoltre la lista dei progetti
sbagliati e delle consegne ritardate indica che quello dei centri di controllo è un settore soggetto
a rapido sviluppo tecnologico. L’esperienza insegna che i sistemi standardizzati giocano un
ruolo importante per la realizzazione di un progetto di successo. La standardizzazione copre sia
l’aspetto funzionale che quello di progetto (hardware, software e database), e conferisce al
sistema di controllo flessibilità e qualità.
La flessibilità è richiesta per adattare il sistema alle differenti necessità delle industrie e per una
futura espansione dei sistemi installati. La qualità permette di soddisfare specifici requisiti in
termini di tempi di consegna, di funzionalità e di prestazioni. Essa garantisce anche una
realizzazione graduale e mantiene la disponibilità del sistema al livello richiesto.
I requisiti di base delle industrie elettriche per la supervisione remota ed il controllo, sono vasti
e molto differenziati. Le funzioni del sistema SCADA di solito soddisfano le esigenze
fondamentali, mentre quelle del sistema EMS forniscono ulteriori applicazioni di calcolo a
disposizione degli operatori.
Lo sviluppo delle applicazioni orientate ai sistemi elettrici di potenza o funzioni EMS è svolto
in parallelo con lo sviluppo delle funzioni del sistema SCADA. L’integrazione stretta tra queste
funzioni nel sistema di controllo in tempo reale è molto importante con riguardo sia alla
comunicazione uomo-macchina che ai programmi di calcolo.
Gli sviluppi tecnologici compiuti negli ultimi anni, hanno permesso di ampliare la gamma delle
funzioni del centro di controllo; ad esempio i tempi di risposta del sistema di comunicazione
uomo-macchina sono tipicamente dell’ordine di un secondo, una nuova rappresentazione
topologica della rete può essere presentata sul video in qualche secondo e la stima dello stato
può essere svolta ciclicamente allo stesso livello dell’acquisizione dati. Il livello delle
prestazioni del sistema durante un grave disturbo della rete è di grande interesse e si può
prevedere per il futuro un incremento dei requisiti relativi al numero di eventi da elaborare e
alla classificazione degli allarmi.
Oggi, le industrie elettriche si affidano ai centri di controllo computerizzati per il loro esercizio,
una situazione che sarà sempre più accentuata in futuro. La disponibilità dei sistemi di controllo
16
diventerà sempre più importante e stimolerà necessariamente la ricerca di nuovi strumenti sia
hardware che software.
17
Capitolo 3
FUNZIONI DI SUPERVISIONE E CONTROLLO
I sistemi di controllo di supervisione computerizzati delle industrie elettriche sono in attività in
tutto il mondo da oltre 30 anni. L’esperienza maturata attraverso numerose installazioni ha
permesso di stabilire un insieme comune di funzioni base operanti in quasi tutte le realizzazioni
esistenti sul mercato, a prescindere dal venditore. Queste funzioni si riferiscono al sistema di
acquisizione dati, controllo e supervisione e sono d’ora in avanti indicate come funzioni
SCADA (dall’inglese “Supervisory Control And Data Acquisition”).
Durante lo sviluppo delle funzioni di SCADA si è affermato un concetto di sistema elettrico
abbastanza standardizzato che può adattarsi facilmente alle peculiari caratterisitiche delle
differenti realizzazioni. Ne consegue che il sistema SCADA è un complesso di strumenti
hardware e software generici in grado di fornire un insieme di funzioni molto flessibile.
L’effettivo impiego di SCADA è specificato dai parametri contenuti all’interno del suo
database. Ciò permette di ridurre i costi, aumentare l’affidabilità del sistema attraverso il ricorso
a progetti già collaudati e rende sicure le fasi dello sviluppo e della realizzazione del sistema.
Il sistema SCADA costituisce inoltre la base per l’implementazione di altre funzioni avanzate;
ad esempio in passato alcune funzioni, come la stima dello stato, venivano svolte “in
background” cioè con bassa priorità ed erano poco integrate con il sistema SCADA. Oggi,
alcuni venditori hanno già cominciato la completa integrazione di queste funzioni, non solo dal
punto di vista dell’interfaccia con l’operatore, ma anche nel software e nel progetto del database
e questa tendenza è destinata a continuare certamente nel futuro.
Requisito fondamentale per la funzione SCADA è quello di consentire un ulteriore sviluppo del
sistema di controllo una volta che essa è stata messa in servizio. Questo è importante, per
rendere possibile l’aggiunta di nuovi componenti al sistema elettrico, i quali devono essere
monitorati e controllati dal sistema di controllo. I computer odierni permettono lo sviluppo del
software e sono per questo dotati di sistemi di sviluppo e di compilatori di facile uso. Il
software, scritto con linguaggi di alto livello, ha un’architettura di tipo funzionale e modulare
che si adatta facilmente ad aggiornamenti ed espansioni. Mediante l’uso dei servizi di database
in tempo reale, è possibile introdurre facilmente nuovi dati e nuove strutture nel sistema tutte le
volte che è necessario.
Questo capitolo fornisce una panoramica delle funzioni SCADA disponibili nei sistemi di
controllo odierni. Dapprima è presentata la funzione di acquisizione ed elaborazione dei dati;
poi sono descritti il monitoraggio, l’elaborazione degli eventi e l’utilizzo dei dati. Il sistema di
controllo agisce sul sistema elettrico, sia in modo automatico che a richiesta, con differenti
funzioni di controllo. Viene presentato il concetto di etichettamento temporale dei dati e ne
18
viene chiarito l’uso per la pianificazione e l’analisi. Il capitolo si conclude con una descrizione
delle funzioni di elaborazione, della preparazione di relazioni e di calcolo matematico.
3.1 Acquisizione dati
Le informazioni di base per quanto riguarda il sistema elettrico sono raccolte dai dispositivi che
si trovano nelle stazioni, sottostazioni e negli impianti di generazione. Le apparecchiature del
sistema di controllo, territorialmente distribuito, permettono l’acquisizione di dati remoti. I dati
possono anche essere inseriti manualmente oppure calcolati. Questi ultimi sono trattati
esattamente come quelli ottenuti con il collegamento dati automatico. Per esempio, i dati relativi
a stazioni passive, cioè sprovviste di attrezzature per l’acquisizione di dati, possono essere
immessi dall’operatore dopo che egli ha ricevuto, per telefono, le necessarie informazioni. Altri
dati possono anche essere calcolati e immagazzinati nel database utilizzando per il calcolo i
valori ottenuti automaticamente; per esempio valori di potenze apparenti possono essere
calcolati a partire dai valori misurati delle potenze attive e reattive.
3.1.1 Indicatori di stato
Lo stato degli interruttori e dei sezionatori e i segnali d’allarme sono indicati con il termine
collettivo di “indicatori di stato”. Normalmente ci sono indicatori di stato sia di tipo singolo (1bit) che doppio (2-bit). La doppia indicazione è normalmente usata per gli interruttori, i
sezionatori e tutti i dispositivi con due stati; un bit rappresenta il contatto chiuso e l’altro bit il
contatto aperto. Questo facilita l’identificazione di valori erronei o di valori transitori (per
esempio le combinazioni 00). Ci possono essere anche indicatori di stato a tre bit nei quali il
terzo bit indica se, nel periodo compreso tra due successive scansioni delle misure, si è
verificata una manovra rapida del tipo chiusura-apertura-chiusura.
Gli indicatori di stato sono normalmente trasmessi solo quando ha luogo un cambio di stato.
All’avvio del sistema (oppure in caso di riavvio del medesimo) è necessario eseguire una
completa acquisizione del valore di tutti gli indicatori. I sistemi di controllo procedono
all’acquisizione di questi dati secondo schemi differenti; per esempio è possibile che tutte le
indicazioni vengono raccolte ciclicamente. Questa soluzione richiede però una sufficiente
capacità del sistema di trasmissione dei dati.
Molto spesso si fa uso della memorizzazione transitoria (o “buffering”) dei dati che rende
possibile la memorizzazione di più di una variazione di stato durante un ciclo di scansione.
In questo modo nessun cambiamento di stato viene perso, anche se si verificano alcuni
cambiamenti, per esempio durante la fase di transitorio che fa seguito ad un guasto.
19
3.1.2 Valori misurati
Diversi tipi di valori misurati vengono acquisiti dal sistema di controllo; ad esempio, livelli di
tensione, flussi di potenza attiva e reattiva, posizione dei variatori di rapporto di trasformatori,
temperature del macchinario elettrico. Questi valori rappresentano lo stato istantaneo delle
grandezze misurate o “punti misura”. Vengono raccolti due tipi di valori:
• valori analogici trasformati in formato binario mediante conversione analogico-digitale
• valori codificati digitalmente
Di solito questi valori istantanei giungono il sistema di controllo sotto forma di pacchetti di
stringhe binarie. Ciò significa che è necessario normalizzare questi valori prima che siano
memorizzati nel database.
I valori delle misure devono essere scalati ed espressi in unità ingegneristiche, prima di essere
presentati all’operatore. Lo scalamento, generalmente di tipo lineare, è comunemente realizzato
come parte delle funzioni del database. Ciò significa che i valori vengono scalati solo quando
sono recuperati dal database e non quando essi vi sono memorizzati, perchè quest’ultimo è il
processo più frequente. Ci sono anche soluzioni progettuali in cui computer speciali, detti
computer “front-end”, effettuano lo scalamento; in questo caso i valori scalati sono poi
memorizzati nel database.
L’acquisizione dei valori misurati è effettuata ciclicamente (è necessario specificare cicli di
scansione e gruppi di misure da acquisire per ciascun ciclo), oppure solo in caso di variazione (è
necessario specificare una banda morta per ciascun punto misurato; la misura è trasmessa solo
quando viene superata la banda morta rispetto all’ultimo valore trasmesso). Quest’ultimo
metodo è frequentemente usato se si dispone di canali di comunicazione a bassa velocità.
Naturalmente all’avvio del sistema SCADA è necessario svolgere un ciclo completo di
acquisizione di tutte le misure. Spesso è realizzato anche un sistema digitale di filtraggio per
ridurre ulteriormente la necessità di acquisire dati.
I cicli di scansione delle misure e i punti misura appartenenti a ciascun gruppo sono di solito
presentati su un apposito terminale video. Le bande morte e i parametri di filtraggio possono
essere memorizzati nel centro di controllo e trasferiti alle RTU; eventuali variazioni sono
eseguite usando semplici procedure interattive attraverso le unità video.
3.1.3 Valori dell’energia
La misurazione dei valori di energia è ottenuta per mezzo dei “contatori di impulsi”. Il
conteggio degli impulsi impiega normalmente due registri: un contatore e un registro a
intervallo di tempo. L’intervallo di tempo normalmente accettato è di un’ora. Quando l’ora
scade, si avvia il trasferimento dal contatore al registro a tempo (congelamento); quindi il
contatore riprende a contare per l’ora successiva e il contenuto del registro è trasmesso al centro
come parte della normale scansione dei dati di misura. Il trasferimento del contenuto del
20
contatore al registro è attuato sulla base del tempo scandito da un orologio locale oppure a
richiesta.
Talora vengono inviate richieste dei valori dell’energia ad intervalli di tempo intermedi. Ciò dà
luogo alla raccolta di una successione di valori parziali, per esempio ogni 6 minuti (10 volte
all’ora), e i successivi calcoli di bilancio energetico permettono agli operatori di tenere sotto
controllo gli interscambi e la generazione secondo i programmi.
3.2 Monitoraggio ed elaborazione degli eventi
I dati acquisiti dal sistema di potenza sono automaticamente controllati per garantire che i valori
calcolati e misurati stiano all’interno dei limiti ammissibili. Anche gli indicatori di stato sono
monitorati relativamente ai mutamenti di stato e memorizzati nella giusta sequenza temporale. I
valori misurati sono controllati anche per quanto riguarda la velocità di variazione e per la
registrazione della loro evoluzione nel tempo (“trend” continuo). Essi sono anche registrati per
permettere l’analisi “a posteriori” dei guasti.
Il monitoraggio dei dati raccolti può avere diversi obiettivi e naturalmente differisce a seconda
dei dati acquisiti. In caso vengano identificate una violazione dei limiti e una variazione degli
indicatori di stato, si procede all’elaborazione di eventi. Questa elaborazione assegna l’evento a
certe classi prestabilite e il risultato di questa viene riportato all’operatore, attraverso il
sottosistema di interfaccia uomo macchina.
3.2.1 Monitoraggio degli stati
Il valore di ciascun indicatore di stato è confrontato con quello precedentemente memorizzato
nel database. Quando lo stato cambia, viene generato un evento. Di solito l’indicatore di stato è
confrontato con uno stato “normale” selezionato in precedenza. In questo modo si può
prevedere una transizione di stato operativo normale/anormale per quel particolare dispositivo
che può essere segnalata all’operatore. Spesso viene specificato che eventi prodotti da
cambiamenti di stato siano presentati all’operatore con un ritardo di qualche secondo. Ciò
risulta utile per sopprimere segnali d’allarme transitori e false posizioni intermedie degli
apparecchi di manovra a due stati. Per esempio, il normale tempo di intervento di un sezionatore
occupa alcuni secondi il che significa che all’operatore verrebbe notificato uno stato
temporaneo 00 nel caso di ritardo nullo.
La Fig. 3.1 fornisce un esempio di monitoraggio degli indicatori di stato.
Spesso sono anche realizzati speciali schemi di ritardo, per identificare operazioni automatiche
di richiusura. Nel caso di una richiusura riuscita degli apparecchi di manovra locali, gli allarmi
vengono soppressi. Ad ogni modo il sistema automatico di monitoraggio, indica esattamente ciò
che è successo nella lista degli eventi.
21
Figura 3.1 Monitoraggio degli stati
3.2.2 Controllo dei valori limite
Ogni valore misurato può essere spesso controllato rispetto ad una serie di valori limite. Come è
Figura 3.2 Monitoraggio di valori limite
22
illustrato nella Fig. 3.2, possono essere limiti introdotti su entrambi i lati di un valore tipico, o
ragionevole. Questi valori identificano la zona normale di una certa grandezza fisica. Alcuni
possibili limiti e i motivi della loro assegnazioni sono i seguenti:
• limiti superiori ed inferiori di misura, usati per specificare l’intervallo in cui ci si aspetta
di trovare un valore ragionevole della grandezza misurata. Se il limite è violato, c’è un guasto
nel sistema di controllo. Alcune volte questo tipo di monitoraggio è intrinseco al progetto del
sistema e dipende dal numero di bit dei convertitori A/D, dal protocollo delle comunicazioni,
dal numero di bit della memoria del database;
• limiti superiori ed inferiori di allarme usati per specificare limiti operativi di
un’apparecchiatura. La violazione di un limite di allarme normalmente produce un messaggio
d’allarme per l’operatore;
• limiti superiori ed inferiori di avviso (“warning”) usati per mettere gli operatori in allerta
permettendo loro di intervenire prima che si siano superati i limiti d’allarme;
• valore limite zero, usato per specificare una banda intorno al valore zero. Un valore che
appare nell’intorno dello zero può essere stimato a zero, rendendo l’eventuale violazione un
evento da elaborare.
Ci sono varie soluzioni per realizzare il monitoraggio dei valori limite; esso può essere
realizzato centralmente o localmente. I sistemi più avanzati per la raccolta dei dati locali usano
sempre il monitoraggio dei valori limite. Quando è realizzato centralmente, il monitoraggio è
usualmente eseguito insieme all’aggiornamento dei valori nel database. Talvolta è anche
eseguito ciclicamente.
I limiti sono specificati individualmente per ogni punto misura e può facilmente essere
modificato dall’operatore attraverso un terminale video. Quando il monitoraggio dei valori
limite è eseguito localmente, i nuovi valori dei limiti sono trasferiti attraverso la rete di
comunicazione dati.
Il monitoraggio è svolto con una banda di insensibilità per ciascun limite, allo scopo di impedire
l’attivazione di un evento da elaborare in relazione a piccole oscillazioni intorno al limite, come
mostrato, per esempio, in Fig. 3.3.
Figura 3.3 Monitoraggio con banda di insensibiltà
23
Spesso si realizza anche un sistema di attivazione ritardata, simile a quello descritto per gli
indicatori di stato, in cui il ritardo nella notificazione di una violazione di limite è utile per
sopprimere gli allarmi in corrispondenza di violazioni transitorie.
3.2.3 Monitoraggio dei valori misurati
Esistono molti sistemi per controllare l’andamento (trend) dei valori misurati.
Di seguito si riporta una descrizione di alcune possibilità:
• calcolo del tasso di variazione per individuare il trend;
• registrazione a penna su modulo continuo, con pannello di controllo oppure con
terminale dedicato;
• presentazione di curve di andamento temporale a video. Spesso questa presentazione è
combinata con qualche tipo di algoritmo di estrapolazione. Esempi di applicazione sono la
previsione dei carichi e i trend del livello d’acqua nei bacini.
L’esame dell’andamento può essere utile quando devono essere controllati certi valori specifici,
per esempio quando sorgono dubbi riguardo al modo in cui una grandezza possa evolvere nel
tempo.
3.2.4 Attributi di qualità per i dati
Tutta la raccolta dei dati e le funzioni di monitoraggio normalmente associano una certa
etichetta di stato ai singoli dati. Queste etichette costituiscono gli attributi di qualità con i quali i
dati sono presentati sull’unità video e nei rapporti.
Nel seguito è presentata una lista di alcuni attributi di uso comune:
• aggiornato o non aggiornato, dato acquisito, inserito manualmente o calcolato;
• bloccato in via di aggiornamento;
• bloccato per elaborazione di eventi;
• bloccato per un controllo remoto;
• stato normale o anormale;
• fuori dai limiti (accettabile, allarme, preavviso, zero);
• stato dell’allarme (riconosciuto o non riconosciuto).
3.2.5 Elaborazione di eventi
Tutti gli eventi generati dalle funzioni di monitoraggio o prodotti da azioni di controllo da parte
degli operatori, sono elaborati prima di essere memorizzati nel database. Questa elaborazione
consiste nel classificare gli eventi raggruppandoli in modo da ottenere una presentazione
appropriata degli allarmi agli operatori sui pannelli di controllo, sui terminali video e in diversi
24
tipi di resoconti. In Fig. 3.4 è riportato un esempio di come gli avvenimenti possono essere
raggruppati e classificati.
Considerando le prestazioni richieste, è essenziale che il sistema sia progettato in modo da
garantire un’elevata efficienza nel trattamento degli eventi, al fine di consentirne una rapida
elaborazione anche durante i disturbi. L’elaborazione degli eventi è una funzione cruciale per il
sistema di controllo e influenza significativamente le prestazioni in tempo reale e le
caratteristiche del sistema sesso. Un esempio di come può essere realizzata la funzione di
elaborazione degli eventi metterà in evidenza le principali considerazioni di progetto.
3.2.6 Sottosistemi e stazioni
I dati inseriti nel database sono sempre accompagnati da un codice di identificazione del
sottosistema, per consentire l’attribuzione dei compiti al personale del centro come descritto nel
capitolo 4. I dati del sistema elettrico sono anche corredati con l’indicazione della stazione di
appartenenza.
Figura 3.4 Classificazione di eventi
25
Ad ogni evento è allora assegnato il medesimo sottosistema e la stessa stazione dei dati. Inoltre
sono di solito impiegati contatori di eventi per sottosistema e per stazione. Questi contatori sono
poi usati per presentare tabelle riassuntive sui livelli d’allarme a video o su di una stampante.
Gli eventi sono memorizzati nel database del sistema in ordine cronologico su una lista, in
modo che l’evento più recente si sostituisca sempre all’evento più vecchio.
Talvolta è possibile distinguere gli eventi relativi a ciascun sottosistema da quelli del sistema di
controllo. Tale suddivisione può essere utile quando è attuata una rigida separazione di compiti
e di responsabilità tra gli operatori.
3.2.7 Classificazione di eventi
L’elaborazione degli eventi analizza ciascun evento e gli assegna uno o più attributi. Questi
attributi riflettono il modo con cui un evento è presentato all’operatore. La classificazione è
usata per smistare gli eventi tra le differenti finestre delle unità video e per classificarli in ordine
di priorità, sulla base delle loro caratteristiche peculiari. I parametri di classificazione sono
forniti in grande varietà dai differenti venditori di sistemi SCADA. Nel seguito viene presentato
un breve elenco.
• Allarme persistente non riconosciuto: dà luogo ad una segnalazione lampeggiante, per
esempio sui diagrammi unifilari come pure in altre finestre a video. Un allarme non
riconosciuto permane fino a che non avviene il riconoscimento da parte di un operatore, ma
l’allarme persiste finché lo stato d’allarme scompare o è inibito.
• Tipo di apparecchiatura: è assegnato un attributo a ciascun punto misura. Per esempio, si
può impiegare una suddivisione che prevede linee di potenza, interruttori di linea, segnali
d’allarme di trasformatori, segnali d’allarme di relè di protezione, ecc.
• Origine dell’evento (assegnata dalla funzione di monitoraggio): un esempio sono gli
eventi spontanei, l’apertura o la richiusura di un interruttore, il comando manuale o automatico.
• Priorità: la priorità è spesso determinata combinando il tipo di apparecchiatura e
l’origine dell’evento.
3.3 Funzioni di controllo
Un’importante classe di funzioni è quella che riguarda le azioni di controllo sul sistema
elettrico. Queste funzioni possono essere raggruppate in quattro sottoclassi: controllo di singoli
dispositivi, messaggi di controllo ai dispositivi di regolazione, schemi di controllo sequenziale e
schemi di controllo automatico.
Controllo di singoli dispositivi significa che alcuni comandi di tipo semplice possono essere
diretti verso il sistema. I comandi di apertura/chiusura di interruttori e sezionatori di linea e i
comandi di avviamento/arresto di generatori sono esempi di questo tipo di funzioni di controllo.
La trasmissione di messaggi di controllo diretti verso dispositivi di regolazione è una funzione
26
di tipo un po’ più avanzato. Possibili applicazioni comprendono le regolazioni di
aumento/diminuzione della potenza e la regolazione puntuale (set-point) della generazione.
Queste funzioni si eseguono transitoriamente, il che implica la necessità di una supervisione
locale. I valori immessi dall’operatore sono confrontati con i valori limite ammessi per impedire
la trasmissione di valori anormali dei parametri di regolazione.
Comunemente, il controllo implica che sia eseguita una sequenza di comandi di controllo
correlati. La funzione di controllo sequenziale permette che una tale sequenza di comandi sia
eseguita automaticamente secondo un ordine predefinito, compresi gli opportuni controlli di
sicurezza ed eventuali ritardi. L’accensione di apparecchiature di illuminazione o di
riscaldamento e alcune manovre sulle sottostazioni, sono esempi di applicazione del controllo
sequenziale.
Le funzioni di controllo suddette sono avviate manualmente eccetto che per le attività di
controllo sequenziale le quali possono essere avviate automaticamente. Ci sono anche azioni di
comando avviate automaticamente, nell’ambito di funzioni di regolazioni ad anello chiuso. Un
esempio è la funzione di “controllo automatico della generazione” (AGC), a cui è assegnata la
responsabilità di modificare la produzione dei generatori per far fronte alle esigenze di
mantenere la frequenza al valore nominale e di mantenere al valore di programma lo scambio di
potenza attraverso le linee di interconnessione. Sono misurati i valori della potenza generata, dei
transiti di potenza lungo le linee di interconnessione e della frequenza. Calcolando opportune
azioni di controllo, vengono determinati i nuovi valori della potenza generata, i quali
ritorneranno ai sistemi di regolazione locali di ogni generatore.
3.4 Etichetta temporale dei dati
I sistemi SCADA di oggi dispongono di notevoli capacità di memorizzazione di dati storici e di
pianificazione. I periodi di tempo per la memorizzazione di dati storici sono diventati sempre
più lunghi (mensili e perfino annuali).
I dati di memorizzazione includono tutti i tipi di dati sia quelli raccolti dal campo che quelli
calcolati, e sono usualmente chiamati “etichettati temporalmente” (“time tagged data” TTD). La
memorizzazione dati e gli strumenti informatici per la loro memorizzazione e per il recupero di
dati dalla memoria, possono essere visti come un’estensione dei servizi del database.
Un pacchetto software per la memorizzazione dei TTD semplifica le operazioni di
memorizzazione di dati in tempo reale e l’esecuzione di calcoli di elaborazione statistica sul
funzionamento del sistema elettrico durante periodi di tempo diversi (ora, giorno, settimana,
ecc). Il legame con la redazione di rapporti è forte dal momento che entrambe le funzioni sono
necessarie per ottenere analisi statistiche.
A supporto di tutte le funzioni che fanno uso dei dati etichettati temporalmente spesso c’è un
comune sottoprogramma d’accesso. La funzione del sottoprogramma è di tradurre le identità dei
valori richiesti e la serie dei tempi di riferimento in opportuni indirizzi di accesso ai dati e di
27
trasferire i dati stessi dalla memoria fisica alla memoria interna del calcolatore. Il
sottoprogramma contiene anche verifiche di sicurezza in modo tale che richieste errate non
vengano eseguite.
3.4.1. Raccolta di dati storici
La raccolta di dati storici è una delle operazioni di memorizzazione di dati etichettati
temporalmente. La necessità di avere dati storici, presenta notevoli diversificazioni tra le
differenti realizzazioni riguardo al numero di grandezze, cicli di acquisizione, ed intervalli di
tempo. I dati storici sono più frequentemente usati per preparare relazioni. E’ ormai prassi
comune memorizzare grandi volumi di dati su nastro magnetico e di effettuare vari tipi di
elaborazione statistica su altri computer invece di memorizzarli presso il centro di controllo.
Normalmente ogni registrazione è costituita da un gruppo di dati e dalla specificazione del
corrispondente periodo di tempo. I valori memorizzati sono sia il valore effettivo che gli
attributi di qualità ad esso associati.
Di solito la registrazione è effettuata ciclicamente. Spesso esiste una funzione integrata di
analisi che, per esempio, calcola valori medi o determina il valore massimo/minimo durante un
dato intervallo di tempo. Per esempio, se viene registrato il valore di un flusso di potenza 60
volte all’ora (uno per ogni minuto), un valore medio può essere calcolato continuamente così
che, per ogni ora, è disponibile una stima dell’energia trasmessa corrispondente.
3.4.2 Dati di pianificazione
La memorizzazione di dati di pianificazione è simile a quella dei valori storici, dal momento
che i dati etichettati temporalmente possono essere trattati come dati di pianificazione; vengono
allora contrassegnati con una data futura. Questa funzione è utile per la valutazione degli
scambi di potenza sulle linee di interconnessione e degli schemi di dispacciamento delle
generazioni nel sistema. La funzione può anche essere utile per simulare fuori servizio
pianificati o per la programmazione della manutenzione.
Quando i dati di pianificazione devono essere immessi per un periodo di tempo successivo, per
esempio le prossime 24 ore, la memoria dei dati di tempo etichettati deve essere aperta, questo
può essere fatto automaticamente o su richiesta di un operatore. In seguito all’apertura, i valori
di pianificazione possono essere aggiornati e ottenuti da varie fonti:
• valori delle previsioni giornaliere, settimanali, ecc.;
• un catalogo predefinito di dati di pianificazione;
• varie fonti di dati calcolati.
28
3.4.3 Memorizzazione su nastro magnetico
I dati di tempo etichettati e gli eventi del sistema di controllo possono essere memorizzati fuori
dal database in file sequenziali su nastro magnetico. Questo è necessario dal momento che
molte industrie elettriche hanno un proprio computer, diverso da quello del centro di controllo,
dove sono eseguiti opportuni programmi per tutte le elaborazioni statistiche.
Dati di tempo etichettati
Scaricare i dati di tempo etichettati su nastro magnetico rende possibile trasferire facilmente i
dati storici e di pianificazione verso computer non in linea. Inoltre, per scopi di simulazione può
essere interessante ricaricare alcuni dati storici nel sistema di controllo, sempre che lo spazio
disponibile sia sufficiente.
Quando i dati di tempo etichettati sono memorizzati su nastro magnetico, è dapprima necessario
fornire un’ intestazione che identifica l’insieme dei dati memorizzati in formato standard. Una
descrizione dei nomi delle grandezze, del periodo di tempo e successivamente i valori effettivi
devono essere riversati su nastro secondo un formato comprensibile. Le operazioni con i nastri
magnetici sono normalmente svolte sotto il controllo di un operatore; egli richiede la copia delle
memorie e carica il nastro appropriato.
Memorizzazione di eventi
Molti sistemi hanno la capacità di riversare tutti gli eventi del database su nastro magnetico.
Questa copia della memoria è utile per la memorizzazione a lungo termine di eventi, ed elimina
la necessità di tenere un’ulteriore copia cartacea del giornale cronologico degli eventi.
Comunemente, gli eventi sono copiati su nastro magnetico in formato ASCII. Questo rende
possibile trasferire la copia degli eventi verso altri computer per ulteriori analisi. La
memorizzazione su nastro magnetico è sempre fatta su richiesta dell’operatore.
3.5 Raccolta e analisi dati relativi ai disturbi
Uno degli obiettivi principali di un sistema di controllo del sistema elettrico è quello di
prevenire le interruzioni nell’erogazione dell’energia. Se si verificano delle interruzioni ci
dovrebbero essere opportune funzioni di assistenza all’operatore. In anni recenti una serie di
funzioni di questo tipo è stata integrata nel sistema SCADA e la tendenza odierna è quella di
integrare le unità di registrazione dei disturbi nel sistema di controllo. Più probabilmente
saranno realizzati algoritmi di l’analisi per assistere gli operatori. La Fig. 3.5 dà una
rappresentazione d’insieme delle funzioni di raccolta dati relativi ai disturbi in un sistema
SCADA.
29
3.5.1 Registrazione di sequenze di eventi
I cambiamenti di stato sono registrati nel corretto ordine temporale; ogni evento è etichettato
insieme con il corrispondente istante di tempo, fornito da un orologio interno. La risoluzione
temporale varia tra differenti sistemi di controllo, ma è tipicamente nell’intervallo tra 1 e 10
millisecondi.
Per ottenere la sincronizzazione per tutto il sistema, le apparecchiature per la registrazione
devono essere equipaggiate con un accurato orologio che deve essere tenuto sincronizzato. C’è
spesso la necessità di realizzare qualche correzione dei singoli orologi.
La sincronizzazione può essere ottenuta per mezzo di messaggi di sincronizzazione emessi dal
centro o piuttosto impiegando orologi locali molto precisi nelle stazioni. Per ottenere una buona
sincronizzazione nel sistema, spesso sono usati segnali radio per la sincronizzazione degli
orologi locali.
La sequenza di avvenimenti registrati è usualmente trasferita al centro di controllo con una
priorità inferiore rispetto agli indicatori di stato e ai valori misurati. Dal momento che ogni
cambiamento di stato è riportato immediatamente con elevata priorità, l’acquisizione delle
sequenze di eventi per successive analisi può essere ritardata. Un tale schema di acquisizione
dati richiede una sufficiente capacità di memoria temporanea (buffer) per la memorizzazione
delle sequenze. La dimensione normale per una tale memoria è di 256 eventi, ma essa può
essere estesa semplicemente aggiungendo altra memoria al computer. Nei computer del centro i
messaggi relativi alla sequenza degli eventi sono memorizzati con una metodologia simile a
quella usata per la memorizzazione della lista di eventi.
Figura 3.5 Schema concettuale della funzione di raccolta di dati relativi ai disturbi
30
La memorizzazione in ordine cronologico è usata nella forma di una lista ad avvolgimento.
I messaggi di sequenza degli eventi sono usualmente presentati in una lista in ordine
cronologico sull’unità video oppure suddivisa per ogni singola stazione. I tabulati possono
essere ottenuti localmente o centralmente usando una stampante o nella forma di relazioni di
sequenza di eventi sull’unità video.
3.5.2 Analisi post-mortem
La funzione di analisi post-mortem (“Post Mortem Review”, PMR) è usata per registrare dati
analogici precedenti e successivi a un disturbo nel sistema elettrico. Alcuni sistemi di controllo
forniscono la registrazione degli indicatori di stato nelle rispettive realizzazioni di PMR. Sia
l’evento che ha causato la registrazione che tutti i dati ad esso relativi vengono memorizzati, per
permettere di studiare successivamente il disturbo attraverso l’interfaccia operatore.
I dati per l’analisi post-mortem sono raccolti realizzando una registrazione ciclica di una serie di
valori selezionati (gruppo PMR) o in qualche caso di tutti i valori. A ciascun gruppo PMR può
allora essere assegnato il proprio tempo di ciclo. Questa registrazione dati è generalmente fatta
centralmente. Il tempo ciclico varia dal ciclo di acquisizione dati ad un intervallo dell’ordine del
minuto. Ci sono anche realizzazioni in cui la registrazione dei dati è fatta localmente il che
permette di raggiungere una discretizzazione temporale dell’ordine dei millisecondi.
Quando si verifica un evento predefinito, i dati memorizzati ininterrottamente vengono spostati
in aree specifiche di memoria (aree PMR) dove la registrazione dei dati continua anche dopo la
fine del disturbo. Ogni cambiamento di indicatori di stato e la violazione dei valori limite di
grandezza sotto controllo può provocare il “congelamento” dei dati PMR e il loro trasferimento
alla memoria permanente del computer. Nel caso che la funzione PMR sia realizzata
localmente, i dati registrati, suddivisi in una serie di messaggi di comunicazione, sono trasferiti
per essere memorizzati nelle aree PMR del computer centrale.
Il sistema può essere dimensionato per memorizzare un certo numero di disturbi contraddistinti
da differenti aree PMR. Ogni area copre un periodo di tempo prima e dopo il disturbo. Intervalli
di tempo tipici per la funzione PMR implementata centralmente sono di 10 minuti prima del
disturbo e di 5 minuti dopo. Per le realizzazioni locali della funzione PMR, si usano periodi di
tempo più brevi.
Quando un’area PMR è completa, essa resta occupata fino a che l’operatore non la libera. Un
messaggio segnala all’operatore quando i dati PMR sono pronti per essere mostrati su video.
Usualmente un certo numero di unità video è disponibile per gestire i dati e le aree PMR.
Di solito i dati PMR sono presentati a video sotto forma di rapporti in cui sono presentate
informazioni sull’evento che ha causato il congelamento dei dati, il momento in cui l’evento ha
avuto luogo fino ai valori effettivi delle grandezze e i loro tempi di registrazione. Quando un
grande numero di valori è stato memorizzato durante un lungo periodo di tempo, si ha a
disposizione un sistema di paginazione dei valori in funzione del tempo.
31
Esistono anche strumenti che permettono il trasferimento di dati dalle aree PMR in altre
secondarie aree di memoria, oppure su nastro per analisi future.
Se la registrazione degli indicatori di stato fa parte del concetto realizzativo della funzione
PMR, è anche possibile visualizzare i dati PMR su diagrammi unifilari simili a quelli usati per
la presentazione dei dati in tempo reale.
3.6 Redazione di rapporti e calcolo
Il sistema di gestione dell’energia (“Energy management system” EMS) è composto da un gran
numero di procedure di calcolo dedicate a particolari scopi; ad esempio la stima dello stato, il
calcolo di flussi di potenza, di dispacciamento economico e la previsione del carico. I calcoli di
competenza del sistema SCADA non sono molto complessi matematicamente, ma sono pesanti
sia per numero sia per la frequenza con cui il calcolo deve essere ripetuto.
Il sistema SCADA perciò comprende una grande varietà di calcoli di tipo sia numerico che
logico. Seguono dei tipici esempi:
• calcolo di dati presentati nei rapporti;
• calcolo dei valori di energia;
• calcolo della riserva;
• valutazione degli interscambi;
• collegamento delle linee alle sbarre di stazione.
I calcoli sono tradizionalmente realizzati scrivendo un programma in un linguaggio ad alto
livello. Questo ha lo svantaggio che la persona che realizza il programma di calcolo deve
conoscere dettagliatamente la programmazione in tempo reale.
Per estendere la possibilità e migliorare l’utilizzo del mezzo di calcolo, spesso è incluso in
SCADA un pacchetto software per l’implementazione uniforme e semplificata del calcolo
numerico. Ciò significa che l’utente non ha la necessità di conoscere dettagliatamente la
programmazione in tempo reale; i calcoli possono facilmente essere realizzati e modificati
quando cambiano le esigenze. Questo pacchetto di software semplifica sia il calcolo che
l’accesso alle grandezze utilizzate. Spesso la definizione del calcolo può essere fatta in modo
interattivo attraverso unità video dedicate. Inoltre, tutti i riferimenti al database e alle operazioni
aritmetiche sono effettuati per nome, in modo tale che il sistema fornisce una buona
documentazione del calcolo.
3.6.1 Calcoli numerici
Comprendono i calcoli il cui risultato, inviato al database, è di tipo numerico. Tipici esempi di
calcolo in un sistema SCADA sono:
32
• calcolo dei dati per la stesura di rapporti;
• calcoli di bilancio di potenza e di valori dell’energia;
• calcoli di potenza disponibile come riserva;
• calcoli di flusso dell’acqua e di contenuto dei serbatoi.
Tutti questi calcoli possono essere realizzati, per esempio, usando uno specifico linguaggio
come prima detto. Questo richiede che il sistema abbia almeno le seguenti caratteristiche:
• svolgere calcolo aritmetico;
• permettere verifiche logiche e sui valori;
• comunicazione con il database per i dati in tempo reale e per quelli etichettati
temporalmente;
• svolgere operazioni matriciali e interpolazioni tabellari.
I calcoli numerici sono usualmente eseguiti ciclicamente su richiesta dell’operatore, oppure, in
qualche caso, in connessione alla presentazione a video o a stampa.
3.6.2 Calcolo dello stato
Un calcolo di stato è una combinazione logica di stati di una serie di indicatori. Si possono
definire gruppi di indicatori in vista della presentazione sul pannello di controllo oppure sulle
unità video. Per esempio, è necessario conoscere lo stato degli interruttori di linea per
determinare il colore con cui la linea è presentata sul video oppure per indicare la connessione
della linea alle sbarre di stazione. Il risultato dei calcoli è spesso anche memorizzato sotto forma
di indicatore di stato.
La definizione di un calcolo di stato è usualmente fatta anche per mezzo del linguaggio speciale
già illustrato. Per essere in grado di svolgere questo tipo di operazioni, il sistema deve possedere
almeno le seguenti caratteristiche:
• verifica e combinazione degli indicatori di stato;
• svolgere operazioni logiche sugli indicatori di stato;
• comunicare con il database per lo scambio dei dati.
La stessa logica può essere usata per calcolare gli stati di molti differenti gruppi di punti. Spesso
è utile definire calcoli tipici. Le variabili e la logica necessaria per svolgere il calcolo sono
inclusi in un “calcolo tipo”. Il calcolo tipo è descritto facendo riferimento a variabili
generalizzate mentre gli effettivi elementi vengono specificati in un secondo tempo mediante
gruppi di variabili.
Il calcolo di stato è avviato solo se cambia il valore di un indicatore di stato che può influire sul
calcolo effettivo. Talvolta il calcolo è svolto ciclicamente o su richiesta dell’operatore.
33
34
Capitolo 4
INTERFACCIA CON L’OPERATORE
La comunicazione uomo macchina è della massima importanza per un moderno sistema di
controllo. Poche funzioni sono totalmente automatiche e la maggior parte di esse richiedono che
l’uomo interagisca con il sistema di controllo, ragione per cui il progetto del sottosistema di
interfaccia con l’operatore coinvolge molte caratteristiche ergonomiche che hanno la stessa
importanza di quelle puramente tecniche. Il progettista del centro di controllo, deve anche
conoscere come è organizzata l’industria elettrica che ha commissionato il centro di controllo,
quanti operatori dovranno lavorarci, con quali ruoli e le eventuali responsabilità di controllo.
Lo stato dell’arte nel progetto della stanza di controllo si basa sull’uso di unità video a colori
come interfaccia principale per la presentazione delle informazioni. Oggigiorno il ruolo dei
pannelli di controllo analogici è cambiato ed essi forniscono solo una visione d’insieme delle
informazioni relative allo stato della rete elettrica.
Le unità video terminali a colori sono ottimi strumenti per presentare all’operatore vari tipi di
informazione che provengono dal complesso delle informazioni raccolte, elaborate e
memorizzate nel database. L’informazione, a partire dalla visione d’insieme fino al livello di
massimo dettaglio, può essere presentata in forme diverse utilizzando, per esempio, schemi
grafici unifilari, tabelle, istogrammi, curve e liste di eventi.
Il posto di lavoro dell’operatore, cioè la sua “console”, è costituito dalla combinazione di una
tastiera e, di solito, più unità video. Il lavoro svolto dall’operatore comprende anche chiamate
telefoniche, comunicazioni via radio con il personale addetto alla manutenzione, operazioni
necessarie ad ottenere le informazioni sul video, l’immissione di dati d’ingresso e le operazioni
di controllo. Perciò è necessario sottolineare l’importanza della progettazione del posto di
lavoro e delle capacità di dialogo, non solo nelle normali condizioni operative, ma anche nelle
situazioni più critiche in occasione di gravi disturbi nel funzionamento della rete elettrica.
Una volta che sono state stabilite le esigenze del sottosistema di interfaccia, è necessario
affrontare le questioni organizzative. Il sistema SCADA - EMS normalmente integra funzioni
sia di natura operativa che di pianificazione, e questo può provocare cambiamenti nelle
procedure tradizionali.
I requisiti relativi alle capacità di presentazione dei dati del sistema e alla gestione di una
comunicazione efficiente con il sistema di controllo computerizzato sono della massima
importanza. E’ necessario che l’operatore sia coinvolto nello sviluppo del sottosistema di
interfaccia con un occhio di riguardo per la tutela del suo ambiente di lavoro.
4.1 Il quadro di comando dell’operatore
Il quadro di comando dell’operatore è normalmente equipaggiato con un numero variabile, da
35
uno a quattro, di video-terminali, da una tastiera, da alcuni dispositivi di puntamento (mouse,
track-ball, penna ottica, ecc.) e da attrezzature ausiliarie di comunicazione (telefono, radio,
ecc.). Tutte le unità video sono usate per presentare simultaneamente differenti parti del sistema
e per immettere i comandi. Tuttavia, nel dialogo con l’operatore, solo un’unità alla volta risulta
connessa con la tastiera.
In un centro di controllo sono normalmente previste più console di comando alle quali sono
assegnati differenti compiti con differenti responsabilità. Per adattare il sistema di controllo
all’organizzazione delle operazioni svolte presso il centro, esiste la possibilità di limitare le
funzioni di dialogo di ciascuna console soltanto ad un’area del sistema elettrico. Questo è
particolarmente importante per un sistema con console remote.
Di solito la comunicazione uomo-macchina mediante console remote è limitata ad una selezione
delle complessive funzioni di dialogo e di presentazione del sistema. Tuttavia, se è disponibile
un sistema di comunicazione di caratteristiche adatte, anche con una console remota è possibile
accedere a tutte le funzioni di dialogo e di presentazione di una qualsiasi console presente nel
centro di controllo.
4.1.1 Suddivisione del sistema
Generalmente i compiti di un operatore fanno riferimento solo a una parte limitata del sistema
di potenza; per questo motivo la suddivisione del sistema nelle sue sezioni e la classificazione
degli elementi che ad esse appartengono è un requisito utile a rendere efficiente il dialogo tra
l’operatore ed il sistema di controllo. Alcune possibili suddivisioni del sistema di potenza sono:
• generazione, trasmissione e distribuzione;
• livelli di tensione della rete di trasmissione;
• regioni geografiche.
Inoltre, ci sono specifici sistemi di funzioni disponibili solo da postazioni di lavoro dedicate e
anche queste funzioni necessitano di una classificazione. Tra tali funzioni si possono
menzionare il simulatore di addestramento, l’interscambio, la programmazione operativa, il
calcolo di flussi di potenza, ecc..
4.1.2 Assegnazione delle funzioni di console.
Il sistema di potenza è normalmente controllato da un numero di operatori che lavorano su
differenti console. Per impedire a persone non autorizzate di interferire o utilizzare il sistema, è
necessario adottare misure di sicurezza per l’intero sistema di controllo, partendo da sistemi di
identificazione del personale autorizzato, aree riservate ecc.. Di solito sono presenti alcune
semplici misure di sicurezza anche per le console, come, per esempio, chiavi di chiusura
combinate con l’impiego di una parola d’ordine per abilitare le funzioni di controllo.
36
Per evitare interferenze tra personale autorizzato, dovute all’esecuzione di azioni di controllo al
di fuori della sfera di competenza, è prevista di solito una verifica di autorizzazione per alcune
funzioni critiche.
Il principio della verifica dell’autorizzazione all’uso di una console si basa sul fatto che il
sistema è diviso in un numero di aree di competenza, ciascuna definita da uno o più sottosistemi
(come sopra descritto). L’autorizzazione all’uso di una console è quindi definita come la
possibilità di presentare informazioni su video e avviare azioni di controllo relativamente a
funzioni esecutive che incidono sul sistema di potenza, sul sistema di controllo o sul contenuto
del database. Quando si richiede di mostrare a video una certa informazione, il controllo di
autorizzazione dà, come risultato, che l’informazione è presentata solo se essa è definita come
appartenente al settore di autorizzazione assegnato a quella console. In caso contrario, essa non
è esposta e viene mostrato all’operatore un messaggio in tal senso.
Generalmente le autorizzazioni di controllo per le azioni dell’operatore vengono svolte nel
seguente modo: la funzione è eseguita se l’apparecchiatura scelta è specificata come facente
parte del settore di competenza attribuito alla console. Se la console non ha l’autorizzazione per
la funzione richiesta, l’operazione non è eseguita. Il risultato è solo un messaggio di errore per
l’operatore. Spesso l’assegnazione di autorizzazioni alla console è presentato a sua volta su
un’unità video.
4.1.3 Allarmi udibili
L’allarme udibile è un sistema per notificare all’operatore una situazione di allarme. Qualche
volta un allarme sonoro è condiviso dall’intera stanza di controllo, ma spesso ciascuna console
ha il proprio sistema di allarmi sonori la cui attivazione segue l’assegnazione delle competenze
della console. Se il sistema applica differenti livelli di priorità agli allarmi, può anche essere
presente una serie di diversi allarmi sonori.
4.2 L’unità video e il suo utilizzo
Il video a colori è il mezzo principale per presentare le informazioni all’operatore (e
probabilmente tale rimarrà ancora per molto tempo). Il terminale video fornisce all’operatore
uno strumento efficiente e flessibile per ottenere informazioni nello stato dei sistemi di potenza
e di controllo. Tutti i dati nel database di sistema sono accessibili dallo schermo.
I terminali video permettono la presentazione delle informazioni in molti modi diversi:
• schemi unifilari;
• tabelle alfanumeriche;
• liste di vario tipo;
• diagrammi.
37
Inoltre, il video può essere usato per presentare le informazioni con differenti livelli di dettaglio,
dalla visione d’insieme dello stato dell’intera rete di trasmissione, fino allo schema di stazione
che mette in evidenza lo stato degli interruttori e dei sezionatori. Dal momento che l’operatore
usa più di un’unità video nella console, egli può studiare lo stato del sistema da differenti punti
di vista simultaneamente. Inoltre, la grande quantità di dati storici raccolta nei computer
permette anche di presentare i dati storici con il medesimo display dei dati in tempo reale.
La disponibilità della rappresentazione a colori e le proprietà grafiche dei terminali sono
sfruttate per distinguere l’importanza relativa delle informazioni. Tutte queste capacità sono
intrinseche ad ogni pagina del display, la quale è costituita da informazioni statiche (che
mostrano la struttura del sistema di potenza) e da informazioni dinamiche (che aggiungono alla
rappresentazione gli aspetti che ne caratterizzano il funzionamento attuale). Lo stato del sistema
di potenza è presentato non solo nello stato operativo normale ma anche nelle condizioni
successive a disturbi. Quest’ultimo richiede mezzi efficienti per presentare gli allarmi, fornendo
consigli e assistenza all’operatore
Il numero di finestre e di pagine di rappresentazione presenti è elevato, ciò dimostra
l’importanza di studiare la capacità di selezione della finestra utile a trovare l’informazione
appropriata.
4.2.1 Aspetto dell’informazione a video
Lo schermo dei computer è usato in una maniera standardizzata permettendo all’operatore di
trovare facilmente l’informazione desiderata. In ciascuna finestra video presentata all’operatore,
sono sempre identificabili due parti che rispettivamente contengono:
• informazioni generali
• informazioni specifiche per un certo display
Le informazioni generali sono comuni per tutti i display e sono sempre rappresentate sullo
schermo. Un esempio effettivo dell’aspetto del video è mostrato in Fig. 4.1.
Il contenuto delle informazioni generali potrà differire nei diversi sistemi ma i punti che
seguono danno un’idea del contenuto più comune.
• Identificazione del display, cioè la designazione del contenuto del video come ad
esempio il nome delle sottostazioni, del sottosistema, ecc.
• Numero di pagine nella forma di x(y) quando il display consta di più di una pagina.
• Il livello di sistema o di sottosistema.
• Data e ora del giorno.
• La situazione degli allarmi (per esempio il più recente allarme non riconosciuto
nell’ambito del settore di competenza della console).
38
• Puntatore che indica quale unità video è collegata con la tastiera.
• Descrizione dei tasti funzione (funzioni di paginazione del display, selezione oggetti,
ecc.)
• Settore di dialogo che contiene i messaggi provenienti dal computer e i caratteri immessi
dall’operatore. Contiene anche i messaggi d’errore per l’ operatore in caso di richieste errate.
4.2.2 Elementi di un display
L’area di presentazione delle informazioni in una finestra video consiste di due parti: la prima è
destinata a contenere le informazioni statiche mentre la seconda mostra le informazioni
dinamiche.
Le informazioni statiche di un display consistono di caratteri alfanumerici o grafici, i quali sono
sempre presentati con lo stesso simbolo e gli stessi colori. L’informazione statica non è
influenzata dallo stato del sistema di potenza (o di controllo). Tutti i caratteri (alfanumerici e
grafici) e i colori disponibili possono essere usati per la rappresentazione degli elementi statici
di un display.
L’informazione dinamica nei display è generata in corrispondenza ad una serie di elementi del
display noti come punti dinamici che dipendono dal tipo di informazioni presentate. In aggiunta
ai punti dinamici ci sono anche gli elementi dinamici, come i messaggi di evento, che
descrivono tutti ciò che accade nel sistema (di potenza e di controllo).
Figura 4.1 Aspetto dello schermo di un terminale video
39
Punti dinamici
Indicatori di stato, valori numerici, “flag” di stato, testi memorizzati nel database di sistema,
possono essere assunti come punti dinamici da presentare in un campo specifico del display.
Inoltre ogni punto dinamico richiede una descrizione che include:
• localizzazione e dimensioni del campo sullo schermo;
• riferimento al database con indicazione dell’intervallo di tempo di aggiornamento dalla
raccolta dei dati storici;
• simbolo e testo per essere presentato con forma e dimensioni corrette;
• attributi di qualità per l’attribuzione dei colori e/o dei simboli.
Nei sistemi SCADA esistono inoltre differenti tipi di punti dinamici come per esempio:
indicatori di stato, valori misurati o testo (si veda la Fig. 4.2.).
Le indicazioni sono usate per mostrare il livello dello stato degli elementi a cui si fa riferimento.
Il valore indicato può essere spesso presentato per mezzo di simboli o differenti tipi di testo. Il
colore e la luce lampeggiante sono spesso utilizzate per presentare alcuni di questi attributi
quali:
• allarme non riconosciuto;
• allarme persistente;
• variabile di controllo con valore bloccato;
• valore non aggiornato;
• blocco dell’elaborazione degli eventi;
• valore aggiornato manualmente;
Figura 4.2 Esempio di presentazione di punti dinamici
40
I valori sono raccolti automaticamente, introdotti manualmente, oppure calcolati e possono
essere mostrati direttamente a video. L’effettivo valore può essere presentato nella forma di
valore numerico o in valore percentuale, in relazione al loro valore nominale. La direzione di
flusso (per le correnti o le potenze) può essere indicata mediante una freccia. Le figure più
importanti possono essere mostrate in differenti dimensioni e il colore della presentazione
controllato usando parametri simili (i soliti attributi di qualità) a quelli usati per gli indicatori di
stato.
I dati numerici possono essere valori accumulati (lettura di contatori di energia); il valore
accumulato per un certo intervallo di tempo viene rappresentato numericamente.
La visualizzazione analogica può essere presentata per un arbitrario valore numerico, di solito,
nella forma di un grafico a barre secondo lo schema di Fig. 4.3. Essa normalmente comprende
molte caratteristiche:
• rappresentazione in diverse direzioni: orizzontale, verticale, positiva, negativa;
• valori assoluti o percentuali (per i valori misurati);
• colore specifico per ogni tipo di variabile.
Le variabili testo sono stringhe di testo che sono mostrate in funzione di qualche variabile.
Queste possono essere presentate come complemento del testo dell’informazione statica.
Punti sensibili (“poke points”)
Un punto sensibile viene definito come punto dinamico su una pagina video, sul quale
l’operatore può puntare il cursore (o altro dispositivo di puntamento) per eseguire un’azione. In
Figura 4.3 Rappresentazione analogica a video
41
aggiunta esistono spesso altri punti sensibili atti a selezionare le informazioni, come ad
esempio: selezionare un sottosistema, selezionare una stazione o selezionare una pagina da
presentare.
Messaggi di evento
Gli eventi, nel sistema di potenza e di controllo, sono registrati e memorizzati nel database di
sistema in ordine cronologico. Questi messaggi di evento sono presentati a video, il più delle
volte, attraverso una lista chiamata appunto “Lista degli eventi”. Il messaggio di evento
normalmente contiene:
• l’istante di tempo di identificazione;
• designazione del punto o dispositivo implicato;
• descrizione dell’ evento;
• attributi di classificazione;
4.2.3 Presentazione dei sistemi di potenza
In questa sezione vengono descritte alcune caratteristiche tipiche di alcuni modi di
rappresentazione.
Schema unifilare
La configurazione e lo stato del sistema di potenza o una parte di esso sono presentati nello
schema unifilare che contiene sia informazioni statiche sia punti dinamici. Le informazioni
statiche consistono nella presentazione di linee, sbarre di stazione, trasformatori e apparecchi di
manovra, presenti nell’effettivo sistema di potenza. I punti dinamici rappresentano le posizioni
degli apparecchi e i valori numerici di flussi di potenza, tensioni e di altre misure, oppure valori
calcolati.
Un terminale video può mostrare informazioni dettagliate sullo stato di una stazione includendo
sbarre, interruttori e sezionatori, oppure può mostrare il collegamento tra diverse stazioni. In
quest’ultimo caso la presentazione della tipologia della rete può essere semplificata mediante un
simbolo per ogni terminale di linea. Questo simbolo mostra se la linea è connessa alla stazione e
la presentazione implica che questa informazione è generata da un calcolo.
L’aggiornamento dei punti dinamici, negli schemi unifilari, si ha in contemporanea alla loro
presentazione sul video; questi valori misurati sono normalmente aggiornati in modo ciclico e
gli indicatori di stato variano quando sono avvertiti dei cambiamenti.
42
Presentazione di tabelle
La presentazione di tabelle è generata a partire da informazioni statiche e dinamiche. Quando si
tratta di dati dinamici, il tempo di riferimento per l’identificazione dei dati è cruciale.
La presentazione in una forma tabellare è adatta per fornire informazioni sul sistema di potenza
non direttamente connesse con i dispositivi del sistema come, per esempio, il rendiconto
momentaneo della produzione e dei consumi o una panoramica di dati storici.
Presentazione di eventi a video
Una caratteristica dei moderni sistemi SCADA è che si possono facilmente selezionare un gran
numero di messaggi relativi ad eventi memorizzati. Questo significa che l’operatore può
facilmente selezionare, per la presentazione a video, solo la classe di eventi desiderata.
La varietà delle classi di eventi è determinata dalla flessibilità nelle funzioni di SCADA
menzionate nel capitolo 3. Alcune classificazioni comuni suddividono gli eventi sulla base di:
• parti del sistema, come sottosistemi o stazioni;
• tipo di apparecchiatura, come trasformatori, interruttori, relè di protezione, ecc.;
• livello di priorità;
• tipo di evento; ad esempio allarmi spontanei, apertura di interruttori o comandi manuali.
Sono considerati due tipi di rappresentazione di eventi:
rappresentazione di tutti i messaggi di evento memorizzati nel database. Il tempo assegnato a
ciascun evento generalmente ha la risoluzione di un secondo.
rappresentazione di sequenze di eventi registrati da equipaggiamenti remoti di acquisizione dati
per ottenere la sequenza di eventi corretta in una situazione di disturbo. Il tempo di risoluzione
tra gli eventi è nell’intervallo tra 1 e 10 ms.
Gli eventi sono presentati in ordine cronologico. Talvolta viene assegnato un colore ad una
videata di eventi, a seconda del suo significato (allarmi = rosso, messaggi = verde). Certi colori
possono essere assegnati ad alcuni eventi a seconda della priorità. La finestra degli eventi è
aggiornata quando si verifica un nuovo evento o quando gli eventi sono riconosciuti e
cancellati.
Liste di stato
Le liste di stato sono usate per presentare sunti di valori e di indicazioni. Il criterio di
preparazione del sommario è determinato, per ogni lista di stato, in base a certe caratteristiche
che devono essere testate per ogni grandezza. Esempi di questi caratteristiche sono:
• condizioni di allarme persistente;
43
• blocco per aggiornamento database;
• blocco per elaborazione di eventi;
• aggiornamento manuale;
• posizione anormale;
• fuori dai limiti di allarme.
L’informazione della lista di stato consiste di una linea per ogni punto misura che soddisfa
almeno uno dei criteri sopra esposti.
Diagrammi
I diagrammi sono usati per seguire le variazioni di grandezze misurate o calcolate durante un
certo intervallo di tempo, o per la presentazione di trend di valori. Esempi di grandezze studiati
sotto forma di diagrammi sono i flussi di potenza, le tensioni, le generazioni e i carichi.
Un diagramma consiste di informazioni dinamiche (di solito con un certo numero di curve per
ciascun diagramma) e di informazioni statiche come il tempo e i valori riportati sugli assi.
E’ necessario che i valori presentati in una curva siano memorizzati dalla funzione di raccolta di
dati storici. Naturalmente questo rende anche possibile seguire l’andamento di una grandezza in
tempo reale, cioè la curva è aggiornata non appena un nuovo valore viene caricato dalla
funzione di raccolta di dati storici.
Finestre a formato
Una finestra a formato è una tabella video con disposizione comune per tutti gli elementi
mostrati (valori misurati, indicatori di stato) di uno specifico tipo di dato. Una finestra a formato
presenta sempre la stessa forma per ogni punto misura presentato. Questo tipo di videata è
spesso usato per la creazione del database; un esempio è mostrato in Fig. 4.6.
Blocco degli appunti dell’operatore
Il blocco degli appunti dell’ operatore è usato per gli appunti correnti. L’intera area dello
schermo può essere usata per le annotazioni dell’operatore e tutti i simboli e i colori disponibili
possono normalmente essere usati in queste schermate.
Il blocco degli appunti appare in differenti livelli di dettaglio e può essere composto da molte
pagine. Di solito negli appunti possiamo trovare funzioni di avviso, pro-memoria di tempi,
scadenze ecc..
44
Figura 4.6 Finestra a formato
4.2.4 Schermate del sistema di controllo
Un sistema SCADA di ultima generazione contiene molte funzioni di autodiagnostica di tutte le
parti del sistema, dall’acquisizione dei dati per le apparecchiature di controllo nelle stazioni di
potenza fino all’interfaccia operatore nel centro di controllo. I risultati del monitoraggio e gli
eventi identificati sono poi memorizzati nel database. Per fornire all’operatore delle
informazioni relative allo stato del sistema di controllo, sono spesso disponibili finestre di
comunicazione con possibilità di presentazione simili a quelle descritti nel paragrafo
precedente. Nel seguito è fornita una descrizione delle caratteristiche di questi display.
Display di configurazione
La configurazione e il suo stato effettivo è presentato sullo schermo di un terminale video in
una forma simile a quella degli schemi unifilari. Il display mostra i dispositivi e il collegamento
come informazioni di tipo statico e lo stato dei dispositivi come informazioni di tipo dinamico.
Il display di configurazione, vedi Fig. 4.7 e 4.8, mostra pure diversi livelli di dettaglio, cioè:
panoramica dell’intero sistema di controllo;
• apparecchiature dell’interfaccia operatore;
• sistema principale di computer;
• sistema di computer front-end;
• sistema di comunicazione;
45
• unità terminali remote (attrezzatura di acquisizione dati nelle stazioni).
Display di evento
I display di evento per il sistema di controllo seguono i medesimi principi impiegati per la
rappresentazione degli eventi del sistema di potenza. La memorizzazione dei messaggi relativi
al sistema di controllo è, però, normalmente separata dalla memorizzazione degli eventi per il
sistema di potenza. Gli eventi mostrati a video sono spesso divisi in due gruppi:
Figura 4.7 Display di configurazione per l’interfaccia operatore
Figura 4.8 Display di configurazione: sistema di comunicazione
46
• gli eventi che contengono messaggi in tempo reale
• gli eventi per la diagnostica del software, dell’hardware e di manutenzione
4.3 Comunicazioni dell’operatore
La comunicazione dell’operatore con il sistema di controllo prende la forma di dialogo
attraverso la console equipaggiata con le unità video e le tastiere. Considerando il progetto del
sistema di comunicazione di un sistema di comunicazione uomo-macchina, tre requisiti
principali dovrebbero essere tenuti in conto: la sicurezza, la semplicità e la flessibilità.
I requisiti di sicurezza sono normalmente soddisfatti mediante controlli sulla validità delle
azioni dell’operatore e inerenti la sicurezza del sistema, come per esempio il controllo
“seleziona-prima-di-agire” (select-before-operate).
Il requisito della semplicità è soddisfatto adottando una formulazione uniforme (facile da
imparare e ricordare) per tutti i dialoghi presentati a video e fornendo sufficienti informazioni
all’operatore. La disposizione della tastiera e lo sforzo di limitare il numero di tasti da premere
sono pure importanti per semplicità.
Le esigenze di flessibilità sono normalmente soddisfatte fornendo la possibilità di progettare
finestre di dialogo a video, praticamente senza limiti. I database e i sistemi di sviluppo su video
possono essere usati interattivamente da una comune console.
In questo paragrafo si considera il dialogo tra l’operatore e il sistema di controllo da un punto di
vista pratico. In particolare vengono mostrati parecchi esempi tratti da realizzazioni pratiche in
questo campo. Gli esempi non fanno necessariamente riferimento ad un particolare sistema, ma
piuttosto riflettono i principi fondamentali del progetto di una tipica interfaccia operatore.
4.3.1 Principi di dialogo e progetto della tastiera
Il dialogo sistema-operatore è svolto normalmente con riferimento alle finestre video. Tutti i
dispositivi e i dati sono interessati da una certa azione di controllo e devono perciò essere
rappresentati a video nella forma di informazioni dinamiche. L’informazione dinamica può
servire come punto sensibile da premere per selezionare il dispositivo.
La tastiera è lo strumento con il quale l’operatore immette i comandi nel computer. Esistono
quattro tipi fondamentali di immissione:
• posizionamento del cursore in un campo dell’unità video che è definito come punto
sensibile per l’azione dell’operatore (per esempio, scelta della schermata video, scelta di un
dispositivo o avvio di una funzione). Normalmente i punti dinamici sono definiti anche come
punti sensibili
• azionamento di un tasto funzione, dedicato o dinamico (dipende dal video)
• scrittura di testi, codici o valori numerici su una linea di dialogo dell’unità video per
47
mezzo dei tasti alfanumerici e del posizionamento del cursore
• riempimento di campi tabellari sullo schermo per mezzo dei tasti alfanumerici e del
posizionamento del cursore
Uno di questi quattro tipi di immissione è sempre usato quando si svolge un’azione di controllo.
Alcune azioni sono considerate come eventi del sistema che, a loro volta, generano messaggi
nella lista di eventi in cui vengono specificati l’ora del giorno, il tipo di azione, i dispositivi
usati e talvolta anche l’identità dell’operatore.
Progetto della tastiera
Il progetto della tastiera è di importanza vitale per la semplicità e l’efficienza della
comunicazione sistema-operatore. Diversi sistemi di controllo sono progettati e realizzati
diversamente; tuttavia si possono sempre identificare alcune funzioni in comune degli stessi.
Segue una descrizione di una tipica serie di tasti funzione su di una tastiera operativa:
• Tasti per visualizzare e selezionare i sottosistemi: aree del sistema, stazioni, schema
unifilare, videate di tabelle, videate di eventi, curve ecc., funzioni menu
• Tasti per selezionare funzioni: controllo, regolazione (aumento/diminuzione e set-point),
immissione di dati, cancellazione (della funzione selezionata)
• Tasti per l’esecuzione di funzioni: aprire/chiudere, avviare/stop, bloccare/sbloccare,
selezione, fine immissione dati
• Tasti per l’assegnazione dei compiti della console: operativa/back-up (collega la console
al computer), video 1-4 (scelta di quale unità video si vuole usare), tempo reale/prova/studio
(per cambiare la modalità operativa)
• Tasti funzioni dinamici, la cui funzione dipende dalla schermata presentata sul video. Il
significato dei tasti funzioni dinamiche è normalmente presentato come parte della schermata
per assistere l’operatore nella scelta
• Tasti per il posizionamento del cursore secondo le diverse direzioni. Spesso sono usati
per indirizzare verso un punto sensibile. Questi tasti sono spesso integrati con altri sistemi di
puntamento: mouse, trackball, joystick o penna ottica
• Simboli alfanumerici e grafici da presentare sullo schermo
• Tasti per il controllo dei colori, delle dimensioni della scrittura e dei simboli
• Tasti per correggere e modificare la schermata
4.3.2 Scelta della schermata
La presentazione di una nuova schermata su un’unità video viene richiesta dall’operatore.
Normalmente ci sono molti modi per collegare le pagine video allo scopo di facilitarne la
consultazione da parte dell’operatore. Nel seguito vengono considerate le scelte più frequenti.
48
Tasti per selezionare un sottostistema o una stazione
Una modo diretto e veloce per ottenere l’informazione desiderata è quello di avere sulla tastiera
tasti dedicati per le schermate di uso più frequente, ottenere la panoramica di un sottosistema e
lo schema unifilare di una stazione. Questi tasti sono spesso forniti di LED per indicare gli
allarmi.
Selezione di sottosistemi
Quando un sottosistema è selezionato una schermata di riepilogo viene automaticamente
mostrata sull’unità video. Questa consiste di una lista di stazioni, schermate e funzioni e
contiene inoltre punti sensibili da selezionare entro la lista per mezzo di un cursore.
Per ogni parte del sistema (sottosistema o stazione) ci possono essere una serie di schermate
suddivise per numero e per tipo. Il passaggio dall’uno all’altro tipo di rappresentazione è
solitamente eseguito per mezzo di una serie di tasti funzione, uno per ogni tipo di schermata.
Esempi tipici di schermata sono:
• schemi unifilari;
• tabelle;
• rapporti;
• diagrammi;
• liste di eventi di varie classi;
• liste di stato.
Di solito, la selezione può anche essere fatta digitando il nome del sottosistema o della stazione
che interessa in una linea di dialogo ed eseguendo la richiesta pigiando un tasto di scelta.
Scelta mediante tasti funzione dinamici
I tasti funzione possono essere usati per estendere le funzioni di scelta delle schermate. Per ogni
schermata può essere specificato un insieme ben definito di ulteriori videate, una per ognuno di
questi tasti funzione, in modo da definire una sequenza logica di pagine video.
Paginazione
Il cambiamento di pagina è eseguito dalla funzione di paginazione. Per ogni schermata la pagina
precedente e quella successiva sono definite e selezionate rispettivamente per mezzo del tasto di
pagina avanti e pagina indietro.
Paginazione in funzione del tempo
49
Di solito è possibile presentare a video dati relativi a differenti istanti di tempo, facendo uso
della funzione di raccolta di dati storici. Questo significa che è possibile presentare i dati storici
sotto forma di schemi unifilari, rapporti o pagine di dati per differenti istanti successivi di
tempo. L’operatore seleziona il tempo iniziale desiderato per mezzo di una finestra di dialogo e
può cambiare pagina secondo la sequenza temporale con i tasti pagina seguente e pagina
precedente.
4.3.3 Controllo del sistema di potenza
Il controllo del sistema di potenza normalmente comprende tre tipi fondamentali di controllo:
• controllo di un singolo componente; ad esempio comandi di apertura e chiusura di
interruttori e sezionatori, comandi di avvio e fermata di generatori;
• messaggi di controllo per i regolatori; ad esempio controllo del rapporto di
trasformazione sotto carico mediante segnali di aumento/diminuzione, valore puntuale
desiderato per una grandezza data inviato ad un dispositivo di regolazione remoto;
• schemi di controllo sequenziali eseguiti automaticamente per svolgere comuni sequenze
di comandi in modo uniforme e sicuro; ad esempio mettere in (o togliere dal) servizio linee o
sezioni di sbarra nelle stazioni elettriche, sequenze di presa di carico per servizi di illuminazione
e di riscaldamento.
Le conseguenze di un’azione di controllo involontaria o erronea possono essere disastrose.
Perciò, il sistema di controllo è stato sempre progettato con grande cura per corrispondere ai
requisiti di sicurezza desiderati. La sicurezza riguarda tutti gli aspetti del sistema, dai dialoghi
dell’interfaccia operatore alla realizzazione dei sistemi di controllo locale nelle sottostazioni.
Il colloquio tra il sistema e l’operatore, per quanto riguarda il controllo del sistema di potenza, è
articolato sulla base dei principi già precedentemente descritti. Tutte le azioni di controllo sono
perciò emanate attraverso il video. L’operatore dapprima seleziona il monitor in cui è
rappresentato il dispositivo da controllare, per esempio uno schema unifilare. Il dispositivo
viene selezionato per il controllo posizionando su di esso il cursore e in seguito si seleziona la
funzione di controllo.
Viene eseguita una verifica per accertare se il controllo è autorizzato dalla console. La validità
del dato immesso dall’operatore è controllata in relazione con i parametri memorizzati nel
database e con lo stato attuale del dispositivo da controllare. Spesso l’azione di controllo è
eseguita secondo lo schema verificare-prima-di-agire (“check-before-operate”), cioè un
comando di selezione è lanciato al dispositivo di controllo locale della sottostazione. Viene
quindi eseguita una verifica sulla possibilità di controllo del dispositivo e la selezione è
riconosciuta mediante l’invio di un messaggio per il centro di controllo.
La selezione del dispositivo è notificata all’operatore da un cambiamento di colore (o dal
lampeggiare) del simbolo del disposi e dall’indicazione del nome del dispositivo selezionato su
di una linea di dialogo. Eventuali errori di selezione danno luogo a messaggi di errore sulla
50
linea di dialogo.
L’esecuzione dell’azione di controllo vera e propria è quindi avviata premendo uno dei tasti di
esecuzione (per es. chiuso/aperto) dopo di che il messaggio di controllo viene trasmesso al
dispositivo locale (RTU).
La notifica dell’ esecuzione della richiesta, è fornita in termini di un messaggio nella lista di
eventi contenente il tempo dell’azione di controllo, l’identificazione e la funzione del
dispositivo interessato. L’operatore può sempre annullare la selezione del dispositivo, invece di
eseguire l’azione di controllo, premendo il tasto di cancellazione, che implica anche la
cancellazione della selezione del dispositivo da controllare.
Il controllo di un dispositivo normalmente risulta nel cambiamento di un indicatore di stato,
che, a sua volta, è presentato come un evento del sistema. La risposta al comando è usualmente
monitorata nel tempo, per verificare che l’indicazione del cambiamento abbia luogo
effettivamente entro un intervallo di tempo predefinito. Al termine dell’intervallo, viene
generato un messaggio d’allarme per l’operatore.
Controllo di un singolo dispositivo
Il controllo di un singolo dispositivo segue lo schema sopra descritto. In questo modo sono
controllati molti dispositivi; tra essi ricordiamo:
• comandi di apertura e chiusura di interruttori e sezionatori
• comandi di avvio e fermata, ad esempio di unità di produzione
• selezione di regolazione manuale o automatica, ad esempio di rapporti di trasformazione
Regolazione in aumento o in diminuzione
La regolazione in aumento o in diminuzione è eseguita come una serie di comandi di controllo
successivi di uno stesso dispositivo. Ciascun comando è emesso dall’operatore ed è letto dal
dispositivo di regolazione come un impulso di controllo di lunghezza fissa.
L’aumento e la diminuzione sono eseguiti dall’operatore in modo simile al controllo di un
singolo dispositivo. Si richiede la regolazione selezionando il dispositivo mediante un
opportuno tasto “regolazione”. L’esecuzione del comando è avviata premendo uno dei tasti di
esecuzione, cioè aumento o diminuzione, i quali determinano l’invio dell’ordine conseguente
all’attrezzatura di controllo locale. Il tasto di aumento/diminuzione può anche essere premuto
ripetutamente. L’operatore termina l’azione di regolazione premendo il tasto di cancellazione
che annulla anche la selezione del dispositivo.
Regolazione puntuale
La regolazione puntuale o di “set-point” consiste nella trasmissione di un valore di regolazione
51
(valore di set-point) per una grandezza il cui dispositivo di regolazione non fa parte delle
attrezzature sotto controllo remoto nella stazione elettrica. La regolazione del set-point è svolta
approssimativamente nella stesso modo del controllo di un singolo dispositivo. La scelta del
dispositivo e la richiesta di regolazione sono riconosciute sulla linea di dialogo. Il nuovo valore
del set-point, nella forma di un valore ingegneristico (MW, kV, ecc.), viene immesso nella linea
di dialogo e la trasmissione del comando è avviata usando il tasto di INVIO.
Il valore del set-point è verificato rispetto ai limiti predefiniti per la corrispondente grandezza; il
suo valore è convertito in un codice adatto alla trasmissione. L’immissione di un valore di setpoint fuori dai limiti di ammissibilità non è accettata e produce un messaggio d’errore sulla
linea di dialogo. Il dispositivo rimane selezionato per la regolazione di set-point finché
l’operatore non annulla il comando di regolazione per mezzo del tasto di cancellazione.
Controllo di sequenze di comandi
Una funzione di controllo di sequenze permette di programmare l’esecuzione automatica degli
ordini di controllo secondo una sequenza predefinita. Le verifiche di sicurezza e gli eventuali
ritardi nel tempo sono incorporati nella sequenza di controllo. La funzione di controllo di
sequenze può essere usata per una grande varietà di applicazioni. Ogni tipo di sequenza di
comandi è prevista sulla base delle esigenze e della prassi operativa di ciascuna industria
elettrica. Nel seguito sono riportati alcuni esempi di applicazione del controllo di sequenze di
comandi:
• connessione/sconnessione di linee di trasmissione alle sbarre di stazione, cioè la
sequenza di comandi di apertura e chiusura degli interruttori e dei sezionatori;
• riconfigurazione delle stazioni elettriche agendo sugli apparecchi di manovra;
• sequenza di comandi di avvio/fermata per impianti di illuminazione pubblica.
Ogni sequenza di controllo contiene un numero di comandi elementari, compresi:
• comandi di controllo;
• verifiche di sicurezza;
• introduzione di ritardi di tempo.
Ogni comando è eseguito nello stesso modo dei controlli manuali descritti in precedenza e
possono essere specificati certi criteri di verifica della sicurezza. In una sequenza di controllo,
questi criteri devono essere soddisfatti prima che il comando di controllo possa essere emesso.
Le verifiche di sicurezza possono essere usate per verificare la correttezza dei dati acquisiti,
come valori misurati e indicatori di stato, o dati che devono essere calcolati. Se un criterio non è
soddisfatto, la sequenza può prevedere diverse possibilità di continuazione o anche la
conclusione della sequenza. Nella sequenza di controllo possono essere inseriti ritardi arbitrari
espressi in secondi. Nei periodi di ritardo le fasi di una sequenza hanno, per esempio, la
52
funzione di attendere il cambiamento di stato di un dispositivo prima che sia attivata la
successiva manovra della sequenza.
Il colloquio tra sistema e operatore, nel caso del controllo di sequenze segue lo stesso principio
di tutte le altre azioni di controllo. La selezione del dispositivo è fatta posizionando il cursore in
un punto in uno schema unifilare o di una tabella video che rappresenta l’oggetto del controllo
sequenziale, dopo di che viene premuto il tasto di avvio del comando. La scelta del dispositivo è
riconosciuta a video dall’identificazione dell’oggetto sulla linea di dialogo. L’operatore dà
inizio all’esecuzione con l’uso di un opportuno tasto di esecuzione; quindi è presentato un
messaggio sulla linea di dialogo per indicare che il controllo sequenziale è in corso.
Durante l’esecuzione l’operatore può seguire la sequenza dei comandi da osservando i
cambiamenti di stato dei dispositivi interessati sullo schermo. L’operatore può anche
interrompere una sequenza di controllo in fase di esecuzione.
4.3.4 Immissione di dati
I sistemi SCADA ed EMS sfruttano tecniche avanzate di database per raccogliere e
memorizzare dati relativi al sistema di potenza (e anche di controllo) nella memoria del
computer. In questo modo è possibile accedere facilmente a tutti i dati mediante riferimento al
database. Dal momento che ogni punto dinamico di una schermata corrisponde ad un
riferimento al database, è facile realizzare procedure di immissione dati nel sistema.
In linea di principio, tutti i dati che sono presentati in una schermata come punti dinamici
possono essere aggiornati per mezzo della funzione di immissione dati.
Il principio è quello di selezionare i dati, mostrati come punti dinamici in una schermata e poi
scegliere la funzione di immissione. Le funzioni di selezione e di immissione sono riconosciute
dal sistema sia tramite cambiamento di colore del punto dinamico sia con la scrittura del dato
selezionato sulla linea di dialogo.
L’immissione di un nuovo valore avviene scrivendo lo stesso su una linea di dialogo e poi
premendo il tasto di fine immissione.
Si usano anche altri tipi di dialogo per l’immissione di dati. Per esempio, l’immissione di un
gran numero di dati, è spesso effettuata utilizzando una tabella di ingresso dove il campo di tutti
i punti dinamici è riempito direttamente sullo schermo senza impiegare tutte le volte la linea di
dialogo. Un tale metodo è utile per inserire o aggiornare i valori previsti dell’interscambio di
potenza o di altri valori utili alla pianificazione. Quando tutti i campi della schermata sono
riempiti o modificati, viene richiesto un aggiornamento del database per mezzo del tasto “fine
immissione”.
I sistemi SCADA ora disponibili hanno una grande varietà di funzioni di immissione di dati.
Qui sotto è mostrata una lista dei tipi differenti di dati che, di solito, possono essere immessi
dalla funzione descritta:
• indicatori di stato;
53
• valori misurati;
• valori programmati;
• appunti sul taccuino dell’operatore;
• commenti sulla schermata degli eventi.
Questi valori sono usualmente elaborati esattamente come quelli raccolti in modo automatico,
cioè sono verificati con riferimento ai cambiamenti di stato e ai valori limite.
Normalmente i valori programmati sono presentati in forma tabellare con una colonna per ogni
grandezza rappresentata, per esempio il transito di potenza lungo una linea di interconnessione,
la potenza generata da un’unità o assorbita da un carico. Ogni riga della tabella rappresenta un
intervallo di tempo. Quando una serie di valori programmati deve essere aggiornata, è
necessario inserire parecchi valori nella medesima colonna. Per semplificare questo tipo di
operazione, in alcuni casi, è possibile selezionare l’intera colonna e quindi passare da un valore
all’altro della colonna usando i tasti di tabulazione.
Scrivendo o cancellando dei testi nel blocco-note dell’operatore, si possono aggiungere nuovi
dati e cancellare quelli vecchi.
Qualche volta il sistema prevede la possibilità di inserire in una o più linee, commenti riguardo
agli eventi presentati a video. Una volta selezionato l’evento al quale si vuole aggiungere un
commento, è possibile inserire il testo desiderato utilizzando la linea di dialogo e premendo
infine il tasto di fine degli ingressi.
4.3.5 Riconoscimento degli allarmi
Gli allarmi diretti alla console dell’operatore devono essere riconosciuti dallo stesso operatore
(o almeno presso la stessa console). Il riconoscimento degli allarmi può avere le seguenti
funzioni:
1. il riconoscimento di un allarme informa il sistema che l’operatore ha preso l’ allarme in
considerazione
2. il blocco o l’inibizione di un allarme persistente indica che l’operatore non necessita di
essere ulteriormente avvertito.
Di solito, il riconoscimento viene eseguito premendo un opportuno tasto nel momento in cui il
cursore è posizionato sul messaggio d’allarme nella schermata degli eventi o su un punto
sensibile nello schema unifilare. E’ possibile il riconoscimento video di tutti gli allarmi.
54
4.4 Funzioni del pannello di controllo analogico
Il pannello di controllo analogico fa parte dell’equipaggiamento tradizionale della stanza di
controllo e ha lo scopo di presentare informazioni e inviare comandi ai dispositivi del sistema di
potenza. Lo sviluppo dei sistemi di controllo computerizzati ha drasticamente cambiato il ruolo
del pannello di controllo.
Oggi il pannello di controllo è usato per fornire all’operatore una visione d’insieme dello stato
del sistema di potenza. Questa visione d’insieme è poi usata per integrare le informazioni
dettagliate che l’operatore ottiene per mezzo del terminale video.
Spesso il pannello di controllo è usato anche per il monitoraggio continuo di certe misure
selezionate dal misuratore, le quali possono anche essere presentate sullo schermo del terminale
video; spesso è conveniente verificare i valori misurati utilizzando unità indipendenti, il più
delle volte costituiti da strumenti di misura (per esempio voltmetri o wattmetri).
4.4.1 Presentazione di indicatori di stato
I dati che rappresentano lo stato di certi dispositivi del sistema di potenza sono presentati sul
pannello di controllo per mezzo di lampadine o diodi emettitori di luce (led). Il valore attuale di
un indicatore di stato determina l’accensione delle lampadine o dei led. Ci sono due differenti
tipi di approcci nella presentazione dei dati di stato sui pannelli di controllo:
1. la presentazione di informazioni dettagliate su ogni interruttore e sezionatore per mezzo
di lampadine o di led. Il vantaggio è che il pannello dà una buona visione d’insieme di
tutti gli apparecchi di manovra del sistema di potenza. Questo sistema è in difficoltà nel
presentare lo stato di una rete di potenza abbastanza estesa, per esempio con 50-100
sottostazioni;
2. la presentazione sul pannello di controllo di dati acquisiti o calcolati fornendo
un’informazione condensata sullo stato dei sistemi di potenza. Può essere utilizzato un
elaboratore degli stati che esegue calcoli di tipo logico impiegando i valori acquisiti
circa lo stato degli interruttori. Lo stato di connessione o distacco di ogni linea può
essere quindi visualizzato per mezzo di una lampadina (accesa o spenta) sul pannello di
controllo.
Esistono anche esempi in cui lo stato è presentato con più lampadine, allo scopo di
rappresentare anche gli attributi di qualità (ad esempio: manovra manuale, bloccato, ecc.).
L’accensione dei led è determinata dai valori effettivi degli indicatori di stato (chiuso, aperto o
in manovra per un indicatore a due valori) e lo stato di alcuni attributi di qualità (ad esempio
allarmi non riconosciuti).
Allarmi di tipo complessivo, ad esempio per insufficiente livello di tensione, gestiti dal database
di sistema, possono essere evidenziati sul pannello di controllo per mezzo dell’accensione di
55
una lampadina nelle vicinanze di una delle stazioni elettriche interessate. La lampadina è accesa
quando ci sono allarmi e luce lampeggiante se questi non sono riconosciuti dall’operatore.
4.4.2 Presentazione di valori misurati
Anche i valori misurati del sistema di potenza sono spesso rappresentati sul pannello di
controllo tramite l’indicazione di uno strumento (analogico, digitale o registratore) o mediante
l’accensione di un gruppo di lampadine.
I valori evidenziati sui pannelli sono aggiornati ciclicamente con un intervallo di aggiornamento
coordinato con il tempo di scansione dell’acquisizione dei dati. Molto spesso si applica un
piccolo ritardo all’intervallo di aggiornamento a causa degli intenti puramente rappresentativi
del pannello di controllo. Infatti va tenuto presente che il monitoraggio continuo di tutte le
grandezza di interesse è svolto dal computer, il quale avverte l’operatore se vengono superati i
limiti operativi.
4.5 Stampanti
Normalmente l’operatore ottiene informazioni circa lo stato del sistema di potenza attraverso il
terminale video della console. Per registrazioni permanenti dello stato, sono disponibili, a
seconda della configurazione del sistema di controllo, diverse unità d’uscita:
• stampanti;
• sistemi per la copia di schermate video (hard-copy);
• plotter.
I documenti prodotti sono usati per successive operazioni, per scopi di documentazione e per la
manutenzione del database del sistema di controllo. Di solito il rapporto stampato è relazionato
per alcune specie di compilazioni o calcolo delle uscite.
Normalmente le stampe sono trattate da funzioni di "spooler", cioè sono inserite in una coda ed
eseguite, a bassa priorità, in parallelo con le altre funzioni del computer. Le stampe sono
memorizzate in memorie secondarie veloci così che i programmi applicativi non subiranno i
rallentamenti dovuti alla lentezza dei dispositivi di stampa.
4.5.1 Relazione di eventi
Si può far riferimento a due tipi di relazione di eventi: la registrazione di eventi, cioè
registrazione continua di eventi su una stampante dedicata nell’esatta sequenza con cui si
verificano, oppure il rapporto sugli eventi generato ciclicamente o a richiesta degli eventi più
recenti.
Il rapporto elimina la necessità di una stampante dedicata per la registrazione di eventi.
56
Registrazione di eventi
La registrazione degli eventi rappresenta il modo tradizionale di mantenere un resoconto degli
eventi accaduti. ed è spesso usata anche come copia di riserva per la funzione di
memorizzazione di eventi nel computer. La registrazione contiene sempre tutte le informazioni
che compaiono nella schermata dedicata agli eventi.
Talvolta è necessaria più di una stampante per la registrazione di eventi; si può infatti arrivare
ad una completa suddivisione del sistema. Ad esempio una stampante è dedicata agli eventi del
sottosistema a 220 e 380 kV, una seconda per quelli del sottosistema a 110 kV, una terza per gli
eventi del sistema di controllo.
Rapporto sugli eventi
In pratica, la funzione di stampa di rapporti in modo periodico o su richiesta dell’operatore
elimina la necessità di mantenere un giornale continuo per gli eventi registrati. Con questa
funzione è possibile ottenere degli estratti dall’insieme degli eventi memorizzati, con la
possibilità di stampare gli eventi relativi ad uno specifico sottosistema, a una sottostazione o gli
eventi di una certa priorità o di una classe precisata. L’aspetto di uno di questi rapporti è simile
a quello della registrazione continua di eventi.
4.5.2 Rapporti di stato
I rapporti di stato sono un utile complemento alla lista degli stati presentata sullo schermo del
terminale. In questo modo è possibile ricevere dal database estratti di qualsiasi grandezza alla
quale è associata una variabile di stato. Per esempio si può ottenere una relazione su tutti gli
indicatori di stato che presentano un valore non autorizzato oppure uno stato intermedio (00), o
una relazione in merito a tutti i valori fuori dai limiti operativi.
I moderni sistemi dispongono di una grande varietà di possibilità per la costruzione selettiva di
liste e rapporti che sfruttano il contenuto del database.
4.5.3 Copia dello schermo
Quasi tutti i sistemi forniscono la funzione di copia di una schermata presentata sul terminale
video. In questo modo una situazione transitoria può essere conservata come documentazione e
utilizzata per una successiva discussione con gli ingegneri di sistema.
La copia a stampa di una schermata è quasi sempre di tipo grafico e è anche possibile ottenere
una stampa a colori. In generale ci sono due differenti tipi di attrezzature per la copia di
schermate:
• una (o più) unità di hard-copy che utilizza i segnali video per la ristampa grafica. Questa
57
copia è spesso in bianco e nero; un’unità di questo tipo normalmente può essere collegata solo
con quattro differenti terminali mediante un multiplexer e ciò ne limita le possibilità di impiego
• una (o più) stampante grafica, in bianco e nero o a colori. Questa stampante può essere
collegata direttamente attraverso il terminale video che è dotato del software e di una memoria
dedicata alla funzione di stampa. La stampante usa carta normale, può essere usata da tutti i
terminali e da tutte le console
La stampa di schermate è ottenuta premendo un apposito tasto funzione presente sulla tastiera.
4.5.4 Relazioni statistiche
L’ampiezza delle relazioni statistiche prodotte dal sistema è aumentata drasticamente negli anni
più recenti. Oggi, le relazioni prodotte dal sistema di controllo costituiscono la parte più
rilevante dei rapporti operativi utilizzati dai diversi dipartimenti delle compagnie elettriche.
Allo stesso tempo il computer principale garantisce la possibilità di memorizzare ed elaborare
grandi quantità di dati storici e di pianificazione.
La funzione di redazione di rapporti è strettamente collegata con le funzioni di memorizzazione
di dati storici e di calcolo. L’operatore può raccogliere e compilare i dati nonché svolgere
elaborazioni di natura statistica prima che abbia luogo la stampa di un rapporto. Molto spesso i
rapporti specificati vengono presentati sul terminale video prima di avviarli ad una coda di
stampa.
L’aspetto, il contenuto e gli eventuali calcoli possono essere facilmente modificati per mezzo di
una funzione per la redazione di rapporti. Il rapporto consiste di elementi simili a quelli delle
schermate video (per esempio, nome del rapporto, titolo, formato dei testi e riferimenti al
database per i valori dinamici).
Il numero di rapporti generati da un sistema di controllo è molto variabile, a seconda del tipo,
della complessità e dalla natura della rete di potenza e delle unità di generazione. Solo qualche
esempio è fornito nel seguito per indicarne le potenzialità.
Per documentare la produzione e i consumi totali di energia elettrica in un’area è possibile
richiedere (o stampare) rapporti. In questo caso si può attivare una opportuna funzione di
calcolo allo scopo di riassumere i dati relativi alla produzione e al consumo per i nodi compresi
nell’area.
La funzione di redazione di rapporti può anche presentare valori ottenuti dalla raccolta di dati
storici, ad esempio una stampa della produzione riassuntiva di un’area, per tutti i giorni della
settimana o la produzione di un generatore per ogni ora di un giorno. Sono compresi anche
rapporti giornalieri e mensili per gli interscambi di energia tra le società elettriche.
58
Capitolo 5
CENTRI DI CONTROLLO PER LE RETI DI DISTRIBUZIONE
Scopo dei sistemi di distribuzione è quello di far giungere a ciascun utente, l’energia elettrica al
livello di tensione più appropriato in relazione alle esigenze del carico.
La rete di distribuzione si sviluppa in:
- media tensione (10-60 kV)
- bassa tensione (400 V)
ed ha una diffusione capillare sul territorio, proprio per l’esigenza di raggiungere il singolo
utente.
Le caratteristiche tipiche di un sistema di distribuzione sono:
•
scopo fondamentale del Gestore del sistema è l’alimentazione dei carichi con la massima
continuità possibile;
•
il sistema è costituito da molti nodi (stazioni, cabine, linee d’alimentazione,…);
•
la rete consiste normalmente di linee radiali più o meno ramificate, alimentate da una sola
parte, con la possibilità di realizzare anelli, per avere linee alternative;
•
le configurazioni di rete sono molto stabili, e sono richieste pochissime manovre all’anno di
interruttori e sezionatori;
•
in molti casi, gli organi di sezionamento, non sono né comandabili né segnalati attraverso lo
SCADA;
•
il sistema si estende su vaste aree del territorio, con continui interventi di modifica ed
ampliamento;
•
è fondamentale la capacità di localizzare i guasti ed intervenire nel minor tempo possibile
per ripararli;
•
il numero di misure disponibili sull’impianto è limitato;
•
la capacità di interruzione degli interruttori può essere inferiore alla corrente di guasto
massima in alcune configurazioni di impianto;
•
il gestore del sistema di distribuzione, non ha alcuna possibilità di controllo sulle sorgenti di
energia (la rete di produzione e trasmissione), mentre può intervenire sui carichi.
Nell’ottica di uno SCADA, un sistema di distribuzione è caratterizzato dall’avere un enorme
numero di componenti semplici, sparsi sul territorio, con un elevato tasso di modifiche ed
ampliamenti nel tempo. Di converso, non è richiesto nessun intervento di controllo o
regolazione real-time, se non a seguito di eventi di guasto. L’adozione di uno SCADA da parte
di un’azienda della distribuzione comporta benefici in termini di:
•
possibilità di automatizzare funzioni manuali, quali ad esempio, il controllo di sezionatori di
linea o la lettura dei contatori di energia;
59
•
migliore sfruttamento della rete, possibile grazie alla conoscenza dello stato di
funzionamento che lo SCADA consente;
•
migliore gestione delle emergenze, con più rapidi interventi di ripristino a seguito di guasti;
miglioramento della qualità del servizio all’utente.
Questi vantaggi possono essere fortemente ampliati se alle funzioni base dello SCADA, si
aggiungono funzionalità specifiche per le reti di distribuzione. Le funzioni applicative
specifiche per la distribuzione elettrica, sono genericamente raggruppate sotto il nome di
“Distribution Management System” (DMS).
La distribuzione elettrica è molto spesso effettuata da aziende multi-servizi, che gestiscono tutte
(o quasi) le reti tecnologiche; dall’acqua ai rifiuti, dalla distribuzione del gas, all’illuminazione
pubblica, al teleriscaldamento, ecc.
La spinta verso un’integrazione orizzontale tra fornitori di servizi diversi, presenta indubbi
vantaggi sia per l’utente, che ha un’unica interfaccia, sia per le aziende che possono realizzare
significativi risparmi.
E’ evidente come un’azienda multi-servizi possa, ad esempio, utilizzare lo stesso scavo per la
posa contemporanea di una tubazione dell’acqua, un cavo elettrico, un tubo del gas, e magari
una fibra ottica se gestisce anche telecomunicazioni. La riduzione dei costi aziendali deve poi,
auspicabilmente, ricadere sugli utenti in termini di riduzioni delle tariffe.
Lo SCADA ha il compito di consentire la gestione in tempo reale degli impianti, mentre lo
strato del DMS ha il compito di predisporre le informazioni necessarie alle varie funzioni
dell’azienda, con particolare riferimento a:
•
ingegneria: i dati rel-time del sistema servono per studi di ottimizzazione, di ampliamento di
rete, di programmazione;
•
acquisti: per programmare gli acquisti di pacchetti di energia da produttori diversi sul
mercato libero;
•
manutenzione: per la gestione degli interventi di manutenzione programmata o straordinaria,
a seguito di guasti;
•
commerciale: per la contabilizzazione dei consumi e l’emissione delle fatture di vendita
dell’energia;
•
pubbliche relazioni: per garantire un’informazione corretta ed immediata circa la qualità del
servizio.
5.1 Integrazione con Custemer Information System
L’elemento critico di un’azienda multi-servizi, risiede nella capacità di interfacciarsi con i
clienti per tutti gli aspetti commerciali e tecnici. Una serie di servizi, sviluppati specificatamente
per sviluppare questi aspetti, sono raccolti nel Customer Information System (CIS).
60
Le principali funzionalità del CIS, svincolate dallo SCADA, sono:
•
Customer Processing: gestisce tutti gli aspetti di interfaccia con il cliente, dall’apertura di un
nuovo contratto fino alla sua estinzione;
•
Customer Information: database di tutti i dati relativi ad un cliente, dallo stato dei
pagamenti, alle abitudini di consumo;
•
Gestioni degli ordini di lavoro: le relazioni con un cliente possono originare la necessità di
eseguire un lavoro, ad esempio installare un contatore di energia. La gestione degli ordini di
lavoro comporta un’integrazione verticale tra diversi reparti aziendali per garantirne la
rintracciabilità e poterne seguire in tempo reale l’evoluzione;
•
Billing: la lettura dei contatori dell’energia può essere automatizzata (attraverso lo SCADA)
o manuale. In entrambe i casi, i valori letti devono essere processati, attribuiti ad uno
specifico cliente, utilizzati per la fatturazione. L’emissione delle fatture e il sollecito dei
pagamenti da parte dei clienti rientra nelle funzionalità definite dal billing.
Tra le funzionalità che correlano lo SCADA-DMS con la gestione clienti, vi sono:
•
Gestione delle chiamate di intervento (Trouble Call Management)
•
Gestione dei gruppi di intervento (Crew Management)
5.1.1 Gestione delle chiamate di intervento
Lo scopo di questa funzione è quello di gestire le chiamate degli utenti che lamentano
disservizi. Le telefonate arrivano ad un centro di chiamate che provvede a registrarle nel DMS.
Questo opera i seguenti passi:
•
raggruppamento delle chiamate provenienti da aree omogenee;
•
localizzazione dei guasti sulla base dei disservizi denunciati dai clienti;
•
richiesta di un intervento manutentivo;
•
descrizione del disservizio.
La localizzazione del componente guasto, avviene associando automaticamente, ad ogni
numero telefonico, un cliente (dal database del Customer Information), ed a questo una sezione
di impianto: linee d’alimentazione, trasformatore MT/BT, cabina di trasformazione. Sulla base
delle chiamate ricevute, viene stilata una lista dei componenti potenzialmente guasti, origine del
disservizio. Viene quindi inviata una richiesta di intervento alla funzione del Crew
Management, il quale provvede ad attivare una squadra di pronto intervento.
Al termine dell’intervento, viene stilato un rapporto del disservizio, in cui compaiono i dati
statistici necessari a quantificare l’entità, solitamente misurata in minuti–per–utente (numero di
minuti di durata del disservizio moltiplicata per il numero di utenti colpiti).
61
5.1.2 Gestione dei gruppi di intervento
La funzione di Crew Management ha lo scopo di gestire le squadre di manutenzione, sia per gli
interventi programmati, si per quelli di emergenza.
La funzione ha lo scopo di ottimizzare le schede di intervento, valutando:
•
la posizione dei veicoli, identificata attraverso l’uso dei GPS e delle mappe del territorio;
•
le caratteristiche della squadra in termini di mezzi e di personale;
•
eventuali apparecchiature per l’intervento richiesto;
•
il tempo di esecuzione stimato degli interventi in corso.
•
Attraverso la funzione di Crew Management, è possibile generare il foglio di lavoro di
ciascun intervento, e creare un archivio storico dei disservizi.
5.2 Integrazione con Geographic Information System
Si è già sottolineato come i sistemi di distribuzione presentino una capillare diffusione sul
territorio, siano costituiti da un numero molto elevato di componenti, e subiscano frequenti
modifiche ed ampliamenti.
La gestione e l’aggiornamento delle informazioni relative agli impianti, risultano quindi
particolarmente complessi, e possono essere fortemente agevolati da un approccio di tipo
grafico, basato su una rappresentazione fisica degli impianti nel territorio.
Analogamente è importante per l’operatore, poter visualizzare su una mappa del territorio
coperto dall’impianto, la posizione dei quadri elettrici, delle linee, delle cabine di
trasformazione, ecc.
Il sistema di gestione delle informazioni in modalità grafica, prende il nome di Geographic
Information System (GIS).
5.2.1 Integrazione in tempo reale
In fase di comando dell’impianto, o alla ricezione di un allarme, è molto utile per l’operatore
avere la possibilità di visualizzare la sezione di impianto interessata.
Per mezzo dello SCADA l’impianto è visualizzato in maniera dettagliata attraverso uno schema
elettrico convenzionale, privo di relazioni con la realtà fisica dell’impianto stesso.
Al contrario, sulle mappe del DMS, sono riportate informazioni molto riassuntive ma
posizionate correttamente sul piano geografico.
Sulle mappe sono riportati simboli statici (non animati) e simboli dinamici, la cui
rappresentazione cambia cioè con lo stato del componente cui si riferiscono. Tipici simboli
dinamici sono quelli di interruttori, sezionatori in linea, misure, allarmi.
Una funzionalità particolarmente utile è quella della colorazione dinamica delle linee, in grado
di mostrarne a colpo d’occhio lo stato. Sono solitamente utilizzate tre colorazioni diverse per
62
indicare linee in servizio, linee fuori servizio, linee guaste.
La rappresentazione geografica dell’impianto, possiede di solito alcune funzionalità tipiche,
quali:
•
Commutazione: consente di commutare automaticamente dalla rappresentazione geografica
a quella schematica di un componente. L’operatore può, ad esempio, selezionare un
interruttore sulla mappa, e passare automaticamente sulla finestra dello SCADA dove
l’interruttore è rappresentato.
•
Zoom: centrando su un punto, mediante un cursore, l’operatore può attivare le funzioni di
ingrandimento o riduzione, per cambiare la scala della mappa visualizzata.
•
De-cluttering: sempre associato alla funzione di zoom, il de-cluttering consiste nel mostrare
o nascondere dettagli non essenziali al variare della scala. Questo garantisce la leggibilità
delle mappe a tutti i livelli di scala, e può essere utilizzato in maniera automatica o manuale,
suddividendo le informazioni per tipologie omogenee, che possono essere attivate o
nascoste a richiesta dall’operatore.
•
Panning: consiste nello spostamento manuale della mappa, ed equivale a cambiare il punto
di osservazione. Il panning sposta di fatto la sezione di mappa visibile nella finestra senza
modificarne il livello di informazione.
Vi sono tre tipi di panning:
grabbing: consente di selezionare un oggetto sulla mappa e di spostarlo con continuità
sulla finestra, trascinando nello stesso tempo la mappa;
scrolling: consente spostamenti a gradini dell’immagine, agendo su cursori per lo
spostamento verticale e orizzontale;
re-centering: è possibile selezionare un punto e riposizionare la mappa in modo che
questo venga posto al centro dello schermo.
•
Find: consente di identificare sullo schermo strade, trasformatori, cabine, linee, attraverso
una funzione di ricerca automatica.
•
Pop-up: finestre operative possono essere aperte per visualizzare risultati di calcolo,
comandare interruttori, leggere misure,…
La rappresentazione geografica degli impianti, rappresenta di fatto il maggior valore aggiunto
del DMS, ed attorno a questa ruotano tutte le funzioni applicative.
5.2.2 Integrazione off-line
Oltre all’esercizio dell’impianto, l’integrazione tra DMS e GIS, risulta molto efficace nella
gestione delle informazioni statiche dell’impianto. Nei GIS le informazioni sono solitamente
immagazzinate a strati, ed è possibile attivare uno o più strati contemporaneamente in
63
visualizzazione o in stampa.
La gestione di un GIS integrato su servizi diversi (acqua, elettricità, gas), rappresenta i maggiori
vantaggi quando si deve operare sul territorio. Diventa infatti possibile ingrandire l’immagine di
una strada e visualizzare tutte le tubazioni sottostanti, o verificare la disponibilità di tubi in un
cavidotto interrato per ottimizzare la gestione dei cantieri e le opere di scavo.
Il GIS è interfacciato con il Customer Information System, e da questo viene aggiornato
quotidianamente per seguire la dinamica dei clienti: un nuovo contratto rappresenta un punto di
misura da posizionare nel GIS, la segnalazione di un guasto deve attivare un intervento di
verifica, una modifica o la cancellazione di un contratto devono essere riportate nel database del
GIS.
Come mostrato in Fig. 5.1, le informazioni del GIS sono rese disponibili a tutti i servizi
aziendali che ne fanno richiesta (ingegneria, personale, esercizio) attraverso la rete interna, e
possono, in alcuni casi e con limitazioni specifiche, essere resi disponibili a terzi registrati.
5.3 Calcoli di rete
Come già per gli EMS, anche per i DMS i calcoli di rete hanno una duplice utilità:
•
on-line per garantire la sicurezza e l’economicità del sistema
• off-line per la pianificazione del sistema
I calcoli di rete che vengono realizzati nei sistemi di distribuzione, sono essenzialmente il
calcolo di cortocircuito e quello di load-flow.
Figura 5.1 Struttura di un sistema SCADA-DMS
64
Le finalità dei calcoli di rete sono riassunte nella tabella seguente:
Tipo di calcolo
On-line
Utilizzo
Cortocircuito
SI
Verifica correnti di cortocircuito
NO
Taratura protezioni
NO
Dimensionamento impianto
SI
Previsione violazioni
NO
Pianificazione interventi
SI
Ottimizzazione assetto
SI
Gestione potenza reattiva
NO
Progetto ampliamenti e nuovi impianti
Load-flow
Il DMS possiede un modello del sistema di distribuzione che ne rappresenta la topologia, ed è
integrato con il database dello SCADA, dal quale vengono prelevati i dati in tempo reale relativi
allo stato degli organi di sezionamento per determinare l’assetto di rete, e dall’assorbimento dei
carichi. Le caratteristiche dei componenti di rete (trasformatori, linee,…) sono prelevate dal
database del GIS insieme ai dati geografici (lunghezze dei cavi, linee,…).
Il DMS è quindi in grado di ricostruire un modello del sistema completo ed aggiornato in tempo
reale sul quale possono operare i programmi di calcolo.
Al di là degli studi off-line, tipici di qualunque sistema di potenza, risulta interessante
analizzare le funzioni operative che possono essere implementate utilizzando i risultati del
calcolo on-line.
5.3.1 Controllo delle manovre
L’esecuzione di una manovra di apertura/chiusura di un organo di sezionamento da parte
dell’operatore, può comportare la redifinizione dell’asseto della rete di distribuzione.
Utilizzando la capacità di eseguire calcoli on-line, è possibile verificare preventivamente gli
effetti della manovra, preavvisando l’operatore di eventuali problemi prima che questi si
manifestino.
Le verifiche preventive sono relative alla verifica delle violazioni dei vincoli di rete; per
esempio, attraverso un calcolo di load-flow, vengono calcolati gli effetti della manovra sulle
tensioni ai nodi e sui flussi di potenza. Per ciascuna tensione è definita una banda di
accettabilità intorno al valore nominale (ad es. ±5%) e per ciascun transito su linee e
trasformatori un carico massimo trasportabile. Quando l’operatore seleziona un comando, viene
calcolato un load-flow partendo dallo stato attuale e vengono verificati tutti i vincoli. Se sono
calcolate violazioni, viene inviato un messaggio di allarme all’operatore che può decidere se
portare a termine o meno la manovra.
65
Un’altra funzione è quella della verifica dei paralleli di rete; la chiusura di un interruttore può
comportare il parallelo di sezioni di rete separate, con potenziali rischi di sovracorrenti, legate
ad eventuali differenze di fase e di ampiezza. Il DMS verifica che le sezioni eventualmente
parallele siano già connesse a monte.
La verifica delle correnti di cortocircuito consiste nel controllare quegli assetti di rete in cui le
correnti di cortocircuito in alcune sezioni possono superare la capacità di interruzione degli
interruttori. Il DMS effettua un calcolo di cortocircuito e confronta il valore delle correnti di
guasto trifase, con i limiti assegnati a ciascun interruttore, inviando un allarme ove questi
vengano superati.
Infine la verifica dell’angolo di fase richiede il controllo dei trasformatori con gruppi orari
diversi (DY11, DY1, YY, DD, …) che potrebbero essere messi in parallelo dalla chiusura di un
interruttore congiuntore, con rischi di sovracorrenti molto elevate. Il DMS verifica l’angolo di
fase tra due sbarre messe in collegamento dalla chiusura di un interruttore, ed invia un allarme
quando l’angolo si avvicina o supera i 30°.
La verifica preventiva degli effetti, consente la definizione off-line di sequenze di manovre che
possono poi essere gestite in automatico dal DMS. In questo modo si evitano, a priori, manovre
dannose, e si elimina il rischio di manovre sbagliate.
5.3.2 Ottimizzazione di rete
Scopo di questa funzione è determinare l’assetto di rete che minimizza le perdite di
trasformazione e distribuzione. Nelle reti MT/BT questo si traduce, il più delle volte,
nell’identificazione del punto di sezionamento delle linee d’alimentazione ad anello, che
garantisce il miglior rendimento nel rispetto dei vincoli di load-flow (tensioni alle sbarre a
carico su linee e trasformatori).
Le configurazioni tipiche delle reti, sono (vedi Fig. 5.2):
•
Anello dalla stessa stazione;
•
Anello da due stazioni diverse;
Figura 5.2 Differenti configurazioni di rete
66
• Albero (con la possibilità di alimentazione da altri rami).
Il numero di nodi e di configurazioni, insieme ai vincoli dimensionali dei componenti, è
talmente elevato nei sistemi reali da rendere impossibile ad un operatore l’identificazione della
configurazione ottima. L’uso di strumenti di calcolo automatico, basati su tecniche di Optimal
Power-Flow, è pertanto indispensabile.
Sono state proposte, ma non ancora applicate su larga scala, tecniche di quasi ottimizzazione,
basate su algoritmi fuzzy.
La ricerca della configurazione a minime perdite, è un’operazione che viene svolta fuori linea in
fase di pianificazione di rete (aggiunta di nuovi segmenti), a seguito di interventi manutentivi,
che rendono indisponibili sezioni di linea, o a fronte di variazioni significative del carico.
5.4 Localizzazione dei guasti
La localizzazione dei guasti nelle reti di distribuzione MT, rappresenta uno dei compiti più
complessi sia per l’estensione delle reti, sia per la scarsa quantità di informazioni disponibili.
In caso di guasto di una rete ad anello (con riferimento alla rete in Fig. 5.3) intervengono le
protezioni in cabina primaria, aprendo l’interruttore in partenza. tutte le cabine di
trasformazione da 1 a 10 sono disalimentate.
Per identificare il punto di guasto vengono aperti progressivamente i sezionatori di linea,
Figura 5.3 Situazione di alimentazione delle cabine elettriche a seguito di un guasto
67
richiudendo l’interruttore in cabina finché il relé di protezione non rileva più il guasto. Le
cabine a valle del punto di guasto sono quindi ri-alimentate dall’altra estremità dell’anello.
La ricerca del guasto in reti ad albero risulta ancora più complessa poiché possono aversi
numerose biforcazioni che devono essere testate progressivamente, sino ad identificare quella
guasta. Questa operazione, in assenza di un sistema SCADA, richiede l’invio di squadre in
campo e può durare ore. Gli utenti possono subire più rilanci di tensione e successive
disalimentazioni.
Il numero e la tipologia dei guasti in una rete di distribuzione dipendono principalmente da due
fattori:
•
Il tipo di linea: aerea o in cavo. Le linee aeree sono soggette a numerosi guasti dovuti a
contatti con alberi, irrigazione dei campi, fulminazioni, ed altri imprevisti. Questi guasti
sono per lo più del tipo monofase a terra, con ripristino automatico delle condizioni di
isolamento una volta che la linea è stata disalimentata. Le linee in cavo, al contrario,
sperimentano guasti di tipo permanente (l’isolamento non si ripristina) sia di tipo monofase,
sia bi o tri-fase. I guasti sono spesso dovuti a lavori di scavo che danneggiano la linea
elettrica.
•
Condizioni di messa a terra del neutro. La scelta di collegare o meno a terra il centro stella
dei trasformatori AT/MT ha ripercussioni pesanti su diversi aspetti del sistema di potenza,
ed è una scelta di base da compiere. Ogni possibile modo di gestione del neutro, presenta
una serie di pregi e difetti, per cui non esiste una soluzione preferibile alle altre. Nel corso
degli anni si sono consolidati usi diversi nelle diverse aree: in nord America si tende a
mettere francamente a terra il neutro, mentre in Europa si preferiscono sistemi isolati o
messi a terra con impedenza risonante.
Le differenze operative tra i diversi sistemi di messa a terra del neutro, si manifestano in caso di
guasto a terra, e si possono riassumere come segue:
•
Messa a terra franca: le correnti di guasto a terra sono elevate, dello stesso ordine di
grandezza delle correnti di guasto trifase e dipendono dalla posizione del guasto. Un guasto
a terra comporta una significativa variazione della tensione sull’intero sistema, ma, allo
stesso tempo, risulta facile rilevare il guasto per mezzo per mezzo di semplici relé di
massima corrente, con selettività cronometrica ed in corrente.
•
Messa a terra su resistenza: la corrente di guasto è limitata a valori contenuti, solitamente tra
100 e 2000 A, riducendo così gli effetti dannosi del guasto stesso. Gli effetti sulle tensioni
sono limitati, e la rilevazione dei guasti può essere attuata utilizzando relé di massima
corrente omopolare (che rilevano cioè la somma delle correnti di fase) con selettività.
•
Messa a terra con bobina di Petersen: la bobina di messa a terra è accordata in modo da
offrire la stessa reattanza delle capacità verso terra del sistema. La corrente che fluisce nel
guasto è così teoricamente nulla, di fatto limitata a pochi Ampere, agevolando l’estinzione
naturale dei guasti transitori. La posizione del guasto non ha effetti sulla corrente di guasto.
Un guasto a terra non causa perturbazioni alla tensione del sistema, ma la rilevazione dei
68
guasti richiede sistemi di protezione complessi.
•
Sistema a neutro isolato: le correnti di guasto sono legate alle capacità verso terra del
sistema, e variano tipicamente da qualche decina a qualche centinaio di Ampere (valori
maggiori nei sistemi in cavo). La corrente di guasto non dipende dalla posizione del punto
di contatto a terra, ma solamente dalla configurazione della rete. Le tensioni non sono
modificate in maniera significativa dal guasto, ma il sistema di protezione è complesso, e
deve utilizzare relé omopolari direzionali, coordinati in tempo.
Il sistema SCADA-DMS può essere utilizzato in maniera efficace per identificare il punto di
guasto, utilizzando tecniche e algoritmi diversi, a seconda del tipo di gestione del neutro e del
tipo di guasto.
La logica di localizzazione del guasto è basata sul confronto dell’impedenza di guasto con
l’impedenza del circuito. Le condizioni necessarie per implementare l’algoritmo di
localizzazione sono:
•
l’acquisizione delle informazioni relative al tipo di guasto (tra le fasi o fase-terra) ed alla
corrente di guasto dai relé di protezione. I relé a microprocessore sono in grado di
trasmettere l’informazione relativa alle correnti di guasto, mentre i relé convenzionali
possono al più segnalare il tipo di guasto ma non la sua entità;
•
la disponibilità del valore della tensione di sbarra in condizioni pre-guasto. La misura
proviene dai trasduttori di misura o da relé di tensione intelligenti;
•
la presenza nel database del DMS dei parametri e della topologia di tutte le sezioni di rete.
In particolare è necessario conoscere: l’impedenza diretta e omopolare di cavi e linee aeree,
la lunghezza di ogni sezione di linea aerea o cavo e la struttura della rete.
5.4.1 Guasti tra le fasi
Nel caso di guasto tra le fasi, la corrente di guasto dipende dalla posizione del guasto stesso,
essendo:
I 3Φ =
V PF
ZF
I 2Φ =
3 / 2 ⋅ VPF
ZF
per guasti trifase
per guasti fase-fase
69
dove Z F è l’impedenza di guasto e VPF è la tensione di fase prima del guasto.
L’algoritmo per la ricerca del guasto consta dei seguenti passi:
1. Determinare il tipo di guasto: acquisire dal relè di protezione l’informazione sul tipo di
guasto (trifase o bifase) e la corrente di guasto;
2. Calcolare l’impedenza di guasto: l’impedenza di guasto è data dalla somma
dall’impedenza a monte del quadro di distribuzione e l’impedenza della linea fino al
punto di guasto. Per ogni quadro l’impedenza a monte è nota, e coincide in pratica con
quella del trasformatore AT/MT. Dal valore della corrente di guasto e dalla tensione preguasto VPF è possibile calcolare l’impedenza di guasto utilizzando le formule sopra
indicate
3. Stimare la posizione del guasto: partendo dal quadro di distribuzione vengono aggiunte
le impedenze dei tratti di linea/cavo in successione, finché non viene raggiunto il valore
dell’impedenza di guasto calcolata. L’impedenza della linea è calcolata partendo dalle
componenti resistive e reattive dei singoli tratti.
Ad ogni biforcazione devono essere considerati entrambi i percorsi e l’algoritmo identifica più
posizioni candidate.
Z = (RS + R1 + ...+ Rn ) + ( XS + X1 + ...+ Xn )
2
2
Un algoritmo di localizzazione di questo tipo, offre un’accuratezza piuttosto limitata, a causa di
una serie di imprecisioni intrinseche non superabili, quali:
•
precisione di TA e TV: non migliore del ±1%;
•
circuiti di misura dei relè di corrente: circa 5%;
•
trasduttori di tensione e circuiti di ingresso delle RTU: circa 2%;
•
variazioni dell’impedenza a monte: circa 5-10%;
•
errore nella conoscenza dei parametri delle linee.
L’accuratezza che ci si può aspettare nella localizzazione dei guasti, è dell’ordine del 15-20%,
valore che può consentire comunque una riduzione significativa dei tempi di fuori servizio.
5.4.2 Guasti a terra
Di gran lunga il maggior numero di guasti nelle reti di distribuzione, avviene tra una fase e
terra. Le percentuali variano a seconda della configurazione della rete e del territorio, ma i
guasti a terra rappresentano comunque almeno una quota intorno all’85% del totale. La
localizzazione dei guasti a terra è quindi uno dei compiti più importanti di uno SCADA-DMS.
Purtroppo è anche uno dei più complessi.
70
Contrariamente a quanto avviene peri guasti tra le fasi, i guasti a terra presentano alcune
caratteristiche che rendono di fatto non utilizzabile un algoritmo di localizzazione basato sul
calcolo dell’impedenza di guasto.
I problemi risiedono nel fatto che:
•
nei sistemi neutro isolato, o con messa a terra su impedenza, la corrente di guasto è
indipendente dalla posizione del guasto stesso;
•
un guasto verso terra può presentarsi come un arco elettrico con una resistenza d’arco e di
contatto elevate rispetto alle altre impedenze in gioco. L’entità della corrente di guasto viene
così a dipendere da fattori casuali, certamente non noti né compensabili da parte dello
SCDA-DMS.
la corrente di guasto monofase a terra è determinata dall’equazione
I1Φ =
3 ⋅ VPF
Xd + Xi + Xo
dove entra in gioco l’impedenza omopolare che per i cavi e le linee aeree, contrariamente a
quella diretta ed inversa, dipende in maniera significativa dall’ambiente circostante. In altri
termini, l’impedenza diretta ed inversa, sono un dato intrinseco ad un cavo ed una linea, mentre
l’impedenza omopolare può assumere valori diversi a seconda dei possibili percorsi delle
correnti nel terreno. La presenza di tubazioni, rotaie, altri cavi con schermi metallici, ecc., può
modificare l’impedenza omopolare di una linea di un fattore 5-10.
Il grado di inaccuratezza di un algoritmo basato sul calcolo dell’impedenza di guasto è talmente
elevato da rendere il risultato del tutto inutile per qualsiasi utilizzo pratico.
L’unico modo di agevolare la localizzazione dei guasti a terra, è quello che prevede
l’installazione in punti strategici della rete di Localizzatori di Guasto (Earth Fault Indicators,
EFI). Si tratta di semplici relé di massima corrente collegati a TA toroidali in grado di rilevare
le correnti omopolari. Quando un localizzatore rileva il passaggio di una corrente omopolare,
prima dell’intervento dei relé di protezione, invia un segnale ad una RTU che trasmette
l’informazione allo SCADA-DMS. Posizionando i localizzatori di guasto alle biforcazioni della
rete guasta. Maggiore è il numero di localizzatori installati, migliore sarà la risoluzione della
localizzazione.
Il guasto è infatti posizionato tra l’ultimo EFI ed il primo non intervenuto.
L’algoritmo del DMS deve quindi essere in grado di ricostruire la topologia della rete, e
devono quindi essere trasmessi i dati relativi ai sezionatori di linea. Sul piano logico, la
localizzazione dei guasti, è un compito semplice, ma richiede l’acquisizione di un numero molto
elevato di informazioni dell’impianto, e costringe all’installazione di RTU nei punti di
sezionamento e di EFI+RTU in tutte le biforcazioni della rete.
71
5.5 Misura della qualità del servizio
L’attività di distribuzione dell’energia elettrica deve essere svolta nel rispetto della Normativa
di Legge e dei provvedimenti dell’Autorità di settore, che in Italia è l’Autorità per l’Energia
Elettrica e il Gas (http://www.autorita.energia.it). La sensibilità alle problematiche legate alla
qualità del servizio è cresciuta in questi ultimi anni. Oggigiorno l’unico parametro che viene
monitorato è la continuità del servizio per gli utenti, misurando il numero di minuti per anno in
cui l’erogazione di energia è sospesa. Non è difficile ipotizzare che in un prossimo futuro altri
parametri saranno monitorati, quali: il flicker, l’inquinamento armonico, i buchi di tensione.
La maggiore difficoltà risiede nell’identificazione di un meccanismo di premio/punizione per
chi viola i limiti posti su questi parametri, tenuto conto dell’interazione che si compie tra
distributore ed utente, per cui si dice che l’utente sia responsabile della qualità della corrente,
mentre il distributore lo è per la tensione.
5.5.1 Le delibere dell’Autorità per l’Energia Elettrica e il Gas
Per migliorare la qualità del servizio di fornitura dell’energia elettrica, nel settembre 1999,
l’Autorità italiana ha emesso la delibera n°128/99, “Definizione degli obblighi di registrazione
delle interruzioni del servizio di distribuzione dell’energia elettrica e di indicatori di continuità
del servizio”.
Questa delibera ha subito delle modifiche e delle integrazioni con ulteriori delibere, 201/99,
202,99, 143/00, 144/00, 138/00, ed è stata quindi sintetizzata nella 155/02, che rappresenta una
sorta di testo unico sull’argomento.
L’Autorità stabilisce i criteri ed i metodi di rilevazione della qualità del servizio, ed impone i
metodi di miglioramento, mediante un meccanismo di premi o penali legate al numero
minuti/anno di mancata fornitura dell’energia agli utenti.
La delibera richiede la produzione di:
•
dati statistici annuali separati per livelli AT, MT, BT;
•
lista delle interruzioni annuali per ciascun utente AT, MT;
•
lista indici medi per area territoriale per utenti BT.
Nel calcolo degli utenti di bassa tensione interessati dai vari disservizi, sono possibili due
diverse opzioni fra loro alternative:
•
rilevazione puntuale degli utenti sottesi ad ogni trasformatore MT/BT e ad ogni partenza BT
di cabina; adottabile se si dà un’esatta attribuzione del numero degli utenti (la rilevazione
puntuale comporta l’installazione di strumenti di misura per utente, oppure l’uso di sistemi
informativi di rete in BT integrati con gli archivi d’utenza e continuamente aggiornati anche
in relazione alle modifiche quotidiane degli assetti rete),
•
stima del numero di utenti per trasformatore e per linea BT calcolati all’inizio di ogni anno
72
rispettivamente come rapporti fra il numero di utenti ed il numero di linee BT.
Le aree geografiche sono localizzate in tre fasce in funzione della densità abitativa:
•
alta (>50000 abitanti della stessa provincia);
•
media (tra 5000 e 50000 abitanti);
• bassa (<5000 abitanti).
In caso di Aziende distributrici che servono più di 50000 abitanti caratterizzate da grandi
differenze interne di densità, è possibile ottenere il permesso di classificare sottoporzioni di rete
in media e bassa concentrazione, purché in ciascuna porzione sia presente un numero pari ad
almeno il 10% degli utenti.
Ogni interruzione si classifica in quattro categorie:
•
con preavviso, notificata con almeno un giorno di anticipo;
•
senza preavviso lunga, con durata >3 minuti;
•
senza preavviso breve, con durata compresa tra 1 s e 3 minuti;
• senza preavviso transitoria, con durata <1 s.
Il tempo d’inizio dell’interruzione è quello dell’apertura del primo interruttore e la durata di
ciascuna interruzione è la somma degli intervalli nel quale l’utente non è alimentato, escludendo
i periodi nei quali è rialimentato durante il corso delle manovre per la ricerca del guasto. Se
un’azienda non è dotata di uno SCADA che rilevi automaticamente l’apertura degli interruttori,
viene considerato come istante iniziale dell’interruzione, il momento in cui si riceve la prima
telefonata di protesta.
L’Autorità richiede la registrazione separata delle cause prime dell’interruzione, classificate
come:
•
Guasto sulla rete nazionale;
•
Guasto alla rete AT;
•
Guasto sulla rete MT (inclusi trasformatori AT/MT);
• Guasto sulla rete BT (inclusi i trasformatori MT/BT).
E’ richiesta anche una registrazione separata delle interruzioni relative ad eventi che non sono
sotto il controllo dell’operatore della distribuzione, quali eventi di forza maggiore, decisioni
dall’Autorità, stato di emergenza o calamità naturali dichiarati dall’Autorità, eccezionali
condizioni meteorologiche per cui sono superati i parametri climatici stabiliti dagli standard
elettrici (vento, temperatura, manicotto di ghiaccio sulle linee,…), guasti causati dagli utenti
(per esempio un guasto dentro l’impianto utente, che causa l’apertura dell’interruttore della rete
pubblica), eventi provocati da altri operatori pubblici quali ad esempio guasti sulla rete di
trasmissione che provocano un black-out della rete di distribuzione.
Gli indici di qualità che devono essere rilevati sono: la media minuti persi in un anno per
ciascun utente, a causa di interruzioni lunghe ed interruzioni notificate; la media minuti persi in
un anno per tutti i tipi di interruzione.
73
Il parametro che viene preso in considerazione per misurare la qualità del servizio, è il valore
medio annuale dei minuti persi per utente per ogni area, solo per interruzioni lunghe dipendenti
dall’operatore di distribuzione. In pratica vengono escluse le interruzioni dovute alla rete
nazionale e quelle dovute ad eventi di forza maggiore o terze parti. Per ogni area geografica
viene stabilito dall’Autorità, un obiettivo di miglioramento partendo dal livello di qualità
attuale: peggiore è il livello e più alto è il miglioramento richiesto.
5.5.2 Il ruolo dello SCADA
L’Autorità italiana impone in pratica a tutte le aziende distributrici di energia elettrica, di dotarsi
di un sistema di telecontrollo o altra idonea strumentazione per la registrazione della continuità
del servizio, in grado di svolgere la funzione di registrazione automatica delle interruzioni senza
preavviso lunghe, brevi e transitorie, queste ultime identificate in base all’intervento di
dispositivi automatici con tempi inferiori a un secondo, e di consentire la successiva
consultazione dei dati registrati.
Lo SCADA dispone infatti dei dati necessari a rilevare le interruzioni, e può essere aggiunta, a
livello DMS, una funzione software per la classificazione delle statistiche richieste
dall’Autorità.
Questo tipo di funzionalità, se deve essere pienamente automatizzata, coinvolge profonde
interazioni tra sottosistemi diversi. Lo SCADA acquisisce i dati in tempo reale dell’impianto
necessari a ricostruire le manovre ed identificare le aree disalimentate. La struttura della rete è
ottenuta dal GIS, mentre il CISA consente di identificare gli utenti coinvolti in una interruzione.
Restano comunque necessarie interazioni manuali degli operatori, per gestire le situazioni che
sfuggono al controllo dello SCADA ( ad esempio identificare le cause di forza maggiore o i
guasti nella rete nazionale). A prescindere dagli obblighi imposti dall’Autorità, la gestione di un
archivio di interruzioni è utile all’azienda distributrice per:
•
migliorare i rapporti con i clienti;
•
identificare aree o situazioni critiche;
•
pianificare gli interventi di manutenzione straordinaria degli impianti.
74
Capitolo 6
STRUTTURA DEL SISTEMA
Il sistema elettrico per l' energia è geograficamente distribuito e spesso attraversa intere nazioni.
Esso comprende produzione, trasmissione, distribuzione e consumo di energia elettrica.
La progettazione di un sistema di controllo è complessa tanto quanto il processo che deve essere
controllato; quindi tra i sistemi di supervisione e controllo di potenza si possono trovare un gran
numero di strutture di controllo e di filosofie di progettazione.
Il repertorio di funzioni di un sistema di controllo dipende da dove esso opera e dal motivo per
cui opera. Diversi tipi di società elettriche, o anche dipartimenti diversi all’interno di una stessa
società, hanno diverse esigenze funzionali che richiedono requisiti differenti al sistema di
controllo, in base ai compiti che devono assolvere. Una società di distribuzione di solito ha
bisogno di un sottoinsieme delle funzioni SCADA e quindi di un piccolo sistema di controllo,
mentre una società più grande può avere un sistema di controllo avanzato che esegue il
controllo in tempo reale.
La filosofia alla base del funzionamento del sistema di potenza influisce sia sui requisiti
funzionali che sulla configurazione del sistema di controllo. Una forte centralizzazione impone
un sistema di controllo centralizzato; carichi distribuiti richiedono un equipaggiamento di
controllo distribuito, che, a sua volta, può fare capo ad un sistema di controllo centralizzato o a
sistemi di controllo dedicato distribuiti sul territorio.
Il sistema di potenza è costituito da una serie di oggetti di interesse che devono essere
controllati e da segnali da monitorare. L'organizzazione del funzionamento del sistema di
potenza è sempre strutturata in maniera gerarchica, a causa della natura stessa del sistema. In
particolare, nella struttura dei sistemi di potenza, si può riconoscere la seguente tipica
organizzazione a livelli
•
Nazionale
Responsabile dell'intero sistema di potenza o della rete di trasmissione
di un Paese
•
Regionale
Responsabile per una regione o per un Paese interconnesso con altre
regioni (o Paesi)
•
Distretto
Responsabile per una città, una grande industria o per un'area urbana o
rurale all'interno di una regione
•
Stazione
Responsabile per uno o più impianti di potenza, sottostazioni di
trasformazione, cabine di trasformazione, ecc.
75
I sistemi di controllo sono spesso strutturati in maniera identica. C'è bisogno di controllo
centralizzato a tutti i livelli. Il vantaggio di distribuire la responsabilità del funzionamento è
ovvio: ogni centro operativo regionale o distrettuale può gestire il proprio sistema se il centro di
controllo nazionale superiore non è in grado di farlo. Uno svantaggio può essere che il livello
più basso non dispone del complesso delle informazioni che potrebbe esser essenziale per il
funzionamento ottimo dell'area.
Questo capitolo introdurrà alcuni concetti di base dei sistemi di controllo, utilizzando tre
sottosistemi concettuali: il sistema locale, il sistema di comunicazione e il sistema centrale. Per
essere in grado di coprire l'intera gamma dei problemi connessi al controllo di un processo così
largamente distribuito, viene definito ogni sottosistema e ne vengono descritte le più importanti
caratteristiche. L' introduzione di questi sottosistemi introduce inoltre alcuni importanti
argomenti rilevanti per l'organizzazione e la struttura del sistema di controllo.
6.1 Sottosistemi
Nell'esaminare la struttura generale di un sistema di controllo, tre parole chiave guidano la
progettazione: gerarchia, distribuzione territoriale ed affidabilità.
La necessità di avere una struttura gerarchica, con funzioni decentrate, è una conseguenza
naturale dell'organizzazione operativa delle utenze, alla quale il sistema di controllo deve essere
adattato. L'estensione geografica del sistema di potenza è il motivo che porta alla concezione di
un sistema distribuito. I costi dovuti a guasti o a mancati interventi in un sistema di potenza
sono così elevati che è necessario imporre requisiti rigorosi per la sicurezza operativa. Il
significato della terza parola chiave è evidente. Un sistema di controllo è utile solo se è
affidabilmente operativo e può sorvegliare e controllare il sistema di potenza.
Attraverso lo studio del sistema concettuale costituito dalle tre parti sopra menzionate: ossia il
sistema locale, il sistema di comunicazione e il sistema centrale, è possibile mettere in luce le
proprietà che riguardano la struttura del sistema di controllo nel suo complesso: vedi figura 6.2
76
Figura 6.2
I sistemi locali comprendono le parti del sistema di controllo installato, per esempio, presso le
sottostazioni e le centrali elettriche per l'acquisizione a distanza di dati e per il controllo. Il
sistema locale permette di raccogliere dati e di eseguire comandi di controllo remoto da un
sistema centrale. In aggiunta alla raccolta di dati fondamentali e all'esecuzione di una funzione,
un sistema locale riferisce inoltre dello stato e del cambiamento di stato al sistema centrale e
svolge talvolta funzioni supplementari di controllo di carattere più locale. Quindi un sistema
locale è quella parte di un sistema di controllo in cui ha luogo la connessione fisica all'impianto;
i segnali e gli apparati elettrici che sono monitorati e controllati sono collegati mediante
apparecchiature elettroniche al sistema locale.
Il sistema locale comunica con il sistema centrale attraverso canali di comunicazione che
formano il sistema di comunicazione il quale connette il sistema locale geograficamente
distribuito con il sistema centrale. Il sistema centrale raccoglie le informazioni ricevute dal
sistema di comunicazione. Esso fornisce all'operatore informazioni in tempo reale utilizzando le
funzioni base di SCADA o eventuali programmi applicativi specifici (load flow, corto circuito,
ecc.). Un sistema centrale, a differenza di un sistema locale, non ha alcun collegamento fisico
diretto con il sistema di potenza.
Il sistema locale può variare in dimensioni e capacità funzionali dando così al complesso del
sistema di controllo una struttura specifica e prestazioni differenti. Semplicemente variando
questi due parametri un sistema di controllo può essere adattato per soddisfare specifiche
richieste. Un sistema centrale può, per esempio, essere collegato ad oggetti e dispositivi di
interesse per il sistema di potenza, utilizzando singoli cavi per ogni punto. Ciò è possibile se la
distanza è abbastanza breve e il numero di oggetti abbastanza limitato. Con questa semplice
procedura si potrebbe stabilire un collegamento punto-punto e trasferire i dati direttamente al
77
sistema centrale. Tuttavia, se la distanza è eccessiva e il processo ampiamente distribuito sul
territorio, questa soluzione diventa difficilmente realizzabile in pratica.
Ciò favorisce l'introduzione del sistema locale, dove i segnali possono essere raccolti, convertiti
in forma digitale e trasferiti attraverso una rete di comunicazione. Se si conferisce al sistema
locale una certa quantità di contenuti funzionali, come per esempio un sottoinsieme (o anche la
serie completa delle funzioni) di SCADA, diventa possibile aumentare la quantità di preelaborazioni eseguite sui dati raccolti al livello più basso. Con l'attribuzione delle funzioni ai
vari livelli gerarchici, ad esempio dal sistema centrale al sistema locale, le prestazioni in tempo
reale possono essere aumentate e l'ammontare delle elaborazioni di dati necessarie può essere
suddiviso fra più computer.
6.1.1 Sistema Locale
Il sistema locale comprende tutte le attrezzature necessarie per il controllo remoto di un oggetto,
di un componente o un sottosistema del sistema elettrico, ad esempio una cabina di
trasformazione o una centrale elettrica. Il sistema locale rappresenta, per così dire, gli occhi, le
orecchie e le mani del sistema centrale. I dati trattati vengono letti e riportati e i comandi
vengono eseguiti dal sistema centrale.
All'interno di un sistema locale può essere identificato un certo numero di sottocomponenti. A
seconda dell' età del sottosistema di potenza con cui il sistema locale è integrato, si possono
trovare diversi componenti del sistema. Di norma, ci sono alcune apparecchiature della
strumentazione locale che costituiscono il tradizionale mezzo di controllo a livello locale.
Queste posso essere utilizzate per fornire al sistema locale informazioni sufficienti e
costituiscono quindi l'interfaccia per il sistema di potenza circostante. Misure e informazioni
sullo stato sono raccolte da un'interfaccia I/O che converte i segnali da analogici in digitali in
modo tale da poter essere usati dal sistema di controllo. Il sistema locale deve essere in grado di
comunicare con il sistema centrale tramite alcune apparecchiature di comunicazione. Può essere
integrato un sistema locale uomo-macchina costituito perlomeno da alcuni strumenti per fornire
informazioni a livello locale utilizzando, per esempio, diagrammi riprodotti a video oppure
stampati.
In una cabina di trasformazione, dove, per esempio, l'apparecchiatura di controllo è predisposta
per il controllo remoto, un sistema locale può essere installato normalmente senza aggiunta, o
con una minima aggiunta di apparecchiature di controllo, oltre a quelle già presenti. In altre
stazioni le apparecchiature di controllo locale solitamente sono sviluppate o modificate in modo
da poter essere dotate di controllo remoto: ad esempio trasduttori e relè ausiliari possono essere
installati in modo da fornire all'interfaccia I/O i segnali di ingresso richiesti. Un sistema di
78
controllo automatico che serve, ad esempio, per la sincronizzazione di alimentatori e generatori
e per l'avvio e l'arresto dei generatori, può anche essere necessario per effettuare il controllo
remoto di una stazione o di una centrale elettrica.
Per le stazioni attualmente gestite da operatori, ma destinate ad essere incustodite quando il
controllo remoto è installato, può essere necessario aggiungere apparecchiature automatiche che
serviranno come back-up per il controllo remoto. Esempi di tali apparecchiature sono quei
controllori automatici che, tramite l'uso di unità di controllo e di sistemi di apertura e chiusura
degli scarichi, impediscono l’eccessivo riempimento dei bacini d' acqua. Le apparecchiature per
il controllo della frequenza, per la distribuzione del carico e per il distacco automatico del
carico costituiscono un altro esempio.
Un sistema locale adeguato comprende sempre le seguenti funzioni:
•
acquisizione dati
-segnali analogici
-segnali digitali
•
controllo delle uscite
-controllo di on/off
•
sistemi di comunicazione con altri computer
Questo elenco può essere esteso con le funzioni di SCADA, funzioni per il controllo locale e
funzioni uomo-macchina. Al crescere del numero di funzioni che il sistema locale deve
svolgere, crescono anche il sistema locale stesso e la sua complessità: si passa così da piccoli
sistemi locali con solo qualche dato di input e output da processare, fino a sistemi avanzati con
centinaia di dati di I/O da elaborare e dotati di funzioni avanzate. Normalmente un sistema
locale viene progettato per soddisfare esigenze che richiedono flessibilità, espandibilità ed
elevata disponibilità. Il loro progetto viene concepito per supportare soluzioni flessibili
all'interno del sistema di controllo. Questo significa che un sistema locale deve essere
modificabile e prevedere l'installazione di funzioni più avanzate.
Le attrezzature dell'interfaccia I/O e i servizi di comunicazione devono essere adattabili a
seconda delle dimensioni dei sistemi locali, dimensioni che cambiano attraverso la
trasformazione degli assetti di sistema.
Il sistema locale deve esser in grado di operare in modo sicuro per lunghi periodi di tempo e in
condizioni ambientali avverse. L' intero sistema di controllo dipende dalla funzione del sistema
locale. Senza “occhi” il sistema di controllo è inutile, “cieco” di fronte a tutte le modifiche di
processo. Infine, anche la manutenzione è molto importante per soddisfare le esigenze di alta
79
disponibilità. Una veloce localizzazione e riparazione dei guasti sono richieste per garantire
tempi di manutenzione rapidi, poiché l'attrezzatura è installata normalmente in luoghi distanti.
6.1.2 Sistema di comunicazione
Il sistema di comunicazione è una parte molto importante del sistema di controllo. Senza di esso
l'intero concetto di raccolta di dati e di controllo remoto sarebbe impossibile. Il sistema di
comunicazione connette il sistema locale con il sistema centrale. I dati vengono trasmessi nel
sistema di comunicazione informa seriale, in quanto c'è sempre una distanza fisica tra differenti
sottosistemi di controllo.
I mezzi di comunicazione che stabiliscono il percorso per la circolazione dei dati tra un sistema
locale e il sistema centrale possono assumere forme diverse, ognuna con caratteristiche
particolari che hanno un qualche effetto sul sistema di comunicazione. Fili e cavi forse sono i
primi a venire in mente, ma oggi sistemi a microonde, ponti radio e anche i satelliti sono
utilizzati per questo scopo.
I tre principi di progettazione del sistema di comunicazione più frequentemente adottati
prevedono una struttura gerarchica, dedicata oppure con struttura a rete.
Struttura gerarchica
Secondo questo tipo di struttura, il livello più basso del centro di controllo è responsabile
dell'acquisizione dei dati, nonché della supervisione e del controllo del sistema locale. Questi
sistemi locali si trovano in diverse sottostazioni, centrali elettriche, centraline di manovra, ecc.,
cioè dove ci sono informazioni rilevanti da raccogliere o apparecchiature da monitorare e
controllare. I dati raccolti vengono poi inviati ad un livello gerarchico superiore, così come sono
stati ricevuti oppure vengono filtrati, tutti insieme o a pacchetti. La stessa procedura viene
seguita al livello successivo. Tra i livelli gerarchici vi è un sistema di comunicazione che
stabilisce la connessione tra i vari livelli. Una struttura gerarchica è spesso organizzata in modo
da avere centri di controllo responsabili del controllo effettivo su un livello inferiore, mentre un
centro di controllo ad un livello superiore ha funzioni di supervisione e monitoraggio. Al
crescere della capacità di trasmissione dei dati del sistema di comunicazione, non vi è alcuna
restrizione, in linea di principio, alla connessione di tutti i centri di controllo all' interno della
gerarchia, con collegamenti computer-computer, dando così la stessa funzione di controllo tanto
al centro di controllo in cima alla struttura gerarchica, quanto al livello più basso.
Struttura dedicata
80
In una struttura dedicata pura, ogni livello gerarchico ha accesso a tutti i dati pertinenti e alle
relative apparecchiature per il controllo. Ogni livello diventa così completamente indipendente
da qualsiasi altro livello all'interno della gerarchia. Per fornire ad un altro centro di controllo i
dati e le informazioni necessarie, si può verificare uno scambio di dati tra i centri di controllo
stessi.
Struttura a rete
La struttura a rete è la soluzione più flessibile, ma fino ad ora la meno usata. Qui, in linea di
principio, tutti i dati sono disponibili per tutti i livelli della gerarchia in qualsiasi momento. Tutti
i centri di controllo e i sistemi locali sono interconnessi in modo che i dati possano essere
raccolti da ogni punto all'interno del sistema interconnesso.
Influenzano la scelta del sistema di comunicazione:
¾ Le effettive linee di comunicazione già esistenti
¾ Le competenze di responsabilità tra le varie società
¾ I centri di controllo già esistenti
¾ Le limitazioni di spesa che può essere investita nell’acquisizione di nuove tecnologie
6.1.3 Sistema centrale
L'apparato del sistema centrale costituisce il cuore del sistema di controllo. Un sistema centrale
comprende solitamente la sala controllo con i necessari apparati di interfaccia uomo-macchina e
il sistema informatico centrale. Questo significa che un certo numero di collegamenti per la
comunicazione dei dati provenienti dal sistema locale arriva al sistema centrale. Il compito di
questo sistema è quello di raccogliere i dati e le informazioni acquisite dalla rete elettrica,
analizzarle e presentare i dati all'operatore, a cui spetta il compito di prendere la decisione finale
ed è responsabile per il funzionamento del sistema elettrico. L'operatore deve essere in grado di
prendere decisioni sulla base delle informazioni ricevute dal sistema centrale.
I requisiti che il sistema centrale deve soddisfare sono molti e stringenti. Tuttavia ci sono alcuni
requisiti generali fondamentali che influenzano pesantemente tanto la progettazione del sistema
centrale quanto le prestazioni e la struttura del sistema di controllo. Essi sono:
¾ Tempo di risposta
¾ Disponibilità
¾ Manutenzione e sviluppo del sistema
81
Il tempo di risposta può essere definito come l’intervallo di tempo che trascorre dal momento in
cui una certa funzione viene richiesta, fino a quando il risultato corrispondente diventa
disponibile. Questo criterio può essere applicato a diverse parti del sistema di controllo, ad
esempio il tempo necessario per inviare i dati dal sistema locale al sistema centrale e fornire un
database aggiornato, oppure il tempo che trascorre dal momento della richiesta di un certo dato
da parte dell'operatore fino all' output sullo schermo. Alcuni dei principali fattori che
influenzano il tempo di risposta sono:
¾ Carico di lavoro del computer
¾ Architettura del computer
¾ Sistema operativo
¾ Database del sistema e accesso al database
¾ Struttura e organizzazione del software
L’affidabilità del sistema centrale scaturisce dal fatto che il sistema centrale dovrebbe essere
sempre in funzione. La disponibilità è definita come la percentuale di tempo in cui il sistema è
in funzione e tale indice dev’essere molto elevato, di norma superiore al 99%. Tale disponibilità
elevata è il risultato del raddoppio del numero delle attrezzature in modo che almeno un
componente sia comunque in funzione.
L' obbligo di manutenzione e sviluppo del sistema è semplicemente dovuto al fatto che il
sistema stesso deve essere progettato in modo che l' hardware e il software, ma soprattutto il
software, possa essere facilmente mantenuto efficiente ed aggiornato. Il software di sistema è
normalmente molto complesso e senza la sua manutenzione ed il suo sviluppo, l'utente si
ritroverebbe in una situazione molto problematica.
La funzione fondamentale del sistema centrale è incentrata attorno all'interfaccia uomomacchina. Essa visualizza i dati di processo elaborati dal computer centrale. Il computer del
sistema centrale è inoltre collegato con i computer destinati alla gestione del sistema di
comunicazione e supporto per lo sviluppo del programma e la manutenzione del sistema.
Le dimensioni delle diverse configurazioni del sistema centrale naturalmente variano in base al
contenuto funzionale, alla quantità di dati che devono essere elaborati e raccolti dal sistema di
potenza, dal numero di utenti, ecc..
La sezione 6.2 sintetizza le tipiche configurazioni del sistema centrale in tre classi diverse. La
scelta finale del sistema centrale e la sua configurazione dipendono da come il sistema di
controllo deve essere applicato ed utilizzato, da chi e perché.
82
6.2 Classi del sistema
Le diverse esigenze richieste ai sistemi di controllo hanno prodotto alcune tipiche famiglie o
classi di sistemi di controllo. In tutti questi sistemi è possibile individuare un sistema locale, un
sistema di comunicazione e un sistema centrale; questi sottosistemi vengono configurati per
soddisfare determinate necessità o requisiti con riferimento alle funzioni che il sistema di
controllo dovrebbe avere. Questa sezione riassume le varie strutture e filosofie del sistema di
controllo, distinguendo le configurazioni esistenti in tre classi, sottolineando i criteri principali
che distinguono le une dalle altre.
La classe 1 è composta da sistemi di controllo progettati intorno ad un unico computer centrale
localizzato in un unico sistema centrale. Nonostante la sua relativa semplicità, questa classe si è
sviluppata rapidamente. Tradizionalmente sono stati usati dei minicomputer come sistemi di
elaborazione centrale per i sistemi di classe 1. Tuttavia, è oggi possibile progettare sistemi
SCADA a basso costo utilizzando anche personal computer. Questa soluzione fa di un pc
equipaggiato con un sistema SCADA la soluzione ideale per l'automazione della distribuzione.
Il rapido sviluppo delle prestazioni dei computer e delle apparecchiature elettroniche
influenzerà questa classe ancora di più in futuro facendone la sede di sistemi di controllo
sempre più avanzati.
La classe 2 è composta da sistemi di controllo con una configurazione di computer ridondante
nel sistema centrale, cercando di soddisfare al meglio le esigenze di un’elevata disponibilità.
Infine, la classe 3 è composta da sistemi multi-controllo, in cui un numero ridondante di sistemi
centrali lavora insieme in varie configurazioni.
6.2.1 Classe 1 – Sistemi non ridondanti
La classe 1 comprende i sistemi di controllo che hanno un unico computer principale. Nel
sistema centrale, un solo computer principale collega l’interfaccia uomo-macchina con il
sistema di comunicazione e i sottosistemi local1. Una configurazione tipica di un sistema di
classe 1 è illustrata nella figura 6.6. Tale configurazione è tradizionalmente basata su un
minicomputer, ma al giorno d'oggi un personal computer è in grado di eseguire un compito
simile.
83
Figura 6.6 Configurazione della classe 1
Ci sono, in linea di principio, due modi diversi di progettare i sistemi di classe 1.
Ad esempio è possibile utilizzare il computer centrale come componente per il collegamento di
tutte le apparecchiature del sistema di controllo. Il problema principale, in questo caso, è che il
computer centrale è interrotto ogni volta che un dispositivo periferico esegue una richiesta di
informazioni o invia o chiede dati da memorizzare o da recuperare dal computer centrale. Il
risultato è un sistema lento, dove c'è poco tempo per altre attività che non siano il trattamento
dei trasferimenti di dati verso la periferica.
In alternativa, il carico di lavoro del computer centrale può essere alleggerito usando sistemi
dedicati per il controllo delle comunicazioni e per la gestione del display. Un sistema “frontend” di solito serve sia come interfaccia per il sistema di comunicazione che per eseguire
qualche manipolazione dei dati. Tramite l'accesso diretto alla memoria (DMA-direct memory
access) i dati sono inviati ad alta velocità direttamente nella memoria del computer centrale, in
questo modo il computer centrale stesso viene interrotto meno frequentemente. Il computer
dedicato alla gestione dell’interfaccia uomo-macchina gestisce la visualizzazione dei dati e le
transazioni con i videoterminali. Lo stesso computer può memorizzare la schermata locale in
modo da ridurre al minimo il tempo necessario per il cambiamento di schermata. Anche questo
computer utilizza l'accesso DMA alla memoria del computer centrale. Tuttavia, non essendoci
alcun tipo di ridondanza per le singole funzioni operative, se una qualsiasi delle componenti del
sistema fallisce, il sistema centrale nel suo complesso è fuori uso.
84
I sistemi in classe 1 hanno le seguenti funzioni:
Acquisizione dei dati
Acquisizione dei dati dei valori misurati, ad esempio potenza, tensione, corrente, temperatura e
livello dell' acqua e indicazioni quali le posizioni degli interruttori e dei sezionatori e i segnali di
guasto.
Operazioni di controllo
Apertura/chiusura di sezionatori o interruttori, start/stop di gruppi elettrogeni, regolazione
manuale o automatica di apparecchiature locali, aumento o la diminuzione della potenza
generata, impostazione/modifica del set-point della potenza generata per il controllo della
produzione di energia, della tensione, ecc.
Sorveglianza
Il sistema controlla automaticamente le informazioni di processo raccolte al fine di rilevare
cambiamenti di posizione di interruttori e sezionatori, il verificarsi della mancanza di segnali
d'allarme o la violazione dei limiti previsti per i valori misurati. In tali casi l'operatore è
informato tramite l'interfaccia uomo-macchina.
Presentazione
Tutte le informazioni raccolte sul sistema di potenza e sullo stato interno del sistema di
controllo possono essere presentate all’operatore.
L'operatore gestisce il sistema di potenza tramite videoterminali e può usare una “mimic board”
come sistema di back-up per avere una panoramica della situazione. Una stampante è collegata
per la stampa, ad esempio, degli eventi provenienti dal controllo del sistema.
Le mimic board contenenti lampade, LED, display numerici, strumenti analogici, registratori su
carta, ancora sopravvivono in molte installazioni, anche se occupano molto spazio, sono costose
e difficili da modificare e ampliare. Le loro dimensioni richiedono anche accorgimenti per
quanto riguarda certi aspetti della costruzione delle sale di controllo, ad esempio l'altezza, il
pavimento su cui le mimic board verranno fissate, le canaline, ecc. Sotto questi aspetti, un
sistema basato sui videoterminali presenta al confronto grandi vantaggi, in quanto può essere
installato in stanze di controllo che somigliano a normali uffici, senza bisogno di alcun requisito
specifico. Un sistema siffatto è anche semplice da modificare o ampliare. Per esempio la
rappresentazione delle stazioni e della raccolta delle informazioni di processo nel computer
centrale, può essere facilmente modificata dallo stesso utente operatore.
85
6.2.2 Classe 2 – Sistemi ridondanti
Se la disponibilità del sistema di controllo deve essere aumentata, si rende necessario
raddoppiare le apparecchiature. Questo è vero per tutti i componenti del sistema, il loro
raddoppio favorisce una più alta disponibilità. La duplicazione, tuttavia, nella maggior parte dei
casi, riguarda solo l'attrezzatura inclusa nel sistema centrale come i computer principali, i
computer front-end, i videoterminali, ecc. Una duplicazione degli apparati di comunicazione e
delle attrezzature deli sottosistemi locali, pur essendo in molti casi vantaggiosa, non viene
sempre realizzata.
Nella configurazione ridondante i due computer principali sono, funzionalmente parlando,
identici. Essi lavorano costantemente in modalità primaria/back-up (master/slave) o in parallelo.
Nella prima modalità il database è continuamente trasferito dal computer primario a quello di
back-up e quest'ultimo computer automaticamente assume il ruolo di computer principale nel
caso in cui il computer primario si guasti. Se i computer lavorano in parallelo, entrambi
aggiornano i propri database.
Un esempio di configurazione di un sistema di classe 2 è mostrato in figura 6.8. Si noti che il
sistema centrale è composto da tre sottosistemi funzionalmente distinti: il sottosistema di
interfaccia uomo-macchina, il computer principale e il sottosistema di front-end.
86
Figura 6.8 Configurazione di un sistema di classe 2
Il sistema di classe 2 può avere un contenuto funzionale piuttosto simile a quello del sistema di
classe 1. L' unica differenza consiste nel fatto che l' apparecchiatura di sistema è duplicata.
Alcune funzioni aggiuntive, come la formazione degli operatori, possono essere facilmente
integrate se il sistema duplicato è del tipo primario/back-up. Il computer di back-up può servire
come risorsa aggiuntiva per realizzare tali funzioni. Un sistema ridondante viene spesso
preferito ad un sistema di classe 1 quando le esigenze di maggiore affidabilità del sistema di
controllo si fanno più stringenti. La capacità di elaborazione dei dati è più grande e il contenuto
funzionale è anch'esso maggiore rispetto ad un sistema di classe 1. Spesso in un sistema di
classe 2, si possono trovare funzioni di controllo aggiuntive per il controllo automatico
centralizzato e locale insieme con funzioni applicative specifiche.
La funzione di controllo di base è la stessa della classe 1, ma in aggiunta alla raccolta di dati, i
sistemi di questa classe sono predisposti per eseguire ulteriori calcoli i cui risultati possono
essere controllati rispetto a limiti specificati. Esempi di calcoli che possono essere eseguiti da
questa classe di sistemi sono:
¾ Calcolo della potenza apparente da misure di potenza attiva e reattiva. Questo può essere
87
importante nel controllo del carico sulle linee di trasmissione.
¾ Calcolo della produzione e del consumo di energia all'interno delle regioni. Questo è
essenziale sia per scopi statistici che operativi.
¾ Esecuzione di funzioni EMS (Energy Management System - sistemi di gestione dell'
energia) come load-flow, stima dello stato, AGC, ecc.
In presenza di apparecchiature più potenti dotate di capacità di immagazzinamento più grandi è
utile sfruttare i computer del centro non solo per la sola funzione di controllo del sistema di
potenza, ma anche per finalità statistiche e di segnalazione. Questa funzione può coprire la
redazione di rapporti giornalieri, settimanali o mensili sulla produzione, il carico, lo scambio di
energia, il flusso di acqua, ecc., la preparazione di rapporti relativi ad eventi nel sistema di
potenza e nel sistema di controllo e di resoconti sulla produzione idroelettrica basati sul calcolo
delle perdite di carico, delle perdite d'acqua, del flusso e della fuoriuscita d'acqua.
Un sistema di classe 2 ha di norma molte postazioni di lavoro, che possono essere installate in
luoghi distaccati, composte da videoterminali con tastiere. Le stampanti sono utilizzate per la
stampa di risultati, relazioni statistiche e per le copie cartacee delle informazioni presentate sui
videoterminali. Una mimic board può essere utilizzata per una panoramica del sistema di
potenza, ma normalmente non per il funzionamento.
6.2.3 Classe 3 – Sistema centrale multi-controllo
Le funzioni di base comprese nelle classi 1 e 2 sono le funzioni di SCADA e non sono
essenzialmente specifiche per le utility di potenza; esse sono usate anche per controllare altri
processi. In alcuni sistemi di classe 2 sono incluse speciali funzioni orientate ai sistemi elettrici
di potenza e questo separa questi sistemi dalla categoria SCADA. Questi sistemi sono spesso
definiti come sistemi di gestione dell'energia (EMS – Energy Management System).
Un sistema di classe 3 è costituito da una serie di sistemi di controllo di classe 1 o di classe 2
che sono interconnessi e lavorano assieme per risolvere esigenze organizzative e/o funzionali.
La principale differenza rispetto alle altre classi è che un sistema di classe 3 si comporta come
un sistema omogeneo nei confronti dell' utente. Nonostante che i singoli sistemi abbiano parte
al controllo in maniera indipendente l’uno dall’altro, ogni operatore ha pieno accesso a tutti dati
e alle risorse del sistema nel suo complesso. Questi dati e risorse possono provenire da qualsiasi
sistema di controllo all'interno del sistema di classe 3.
In un sistema di classe 3 ogni sistema centrale può rispondere alle esigenze di una nazione, di
un bacino di potenza o di una regione o eseguire un programma di utilità di base di
88
monitoraggio e controllo. Esso può rappresentare una gerarchia di sistemi di controllo o un
certo numero di sistemi centrali allo stesso livello all'interno di un gran numero di sistemi di
controllo gerarchici. L'interconnessione tra i diversi sistemi di controllo rende possibile per ogni
sistema di controllo condividere dati, risorse di calcolo e funzioni con gli altri sistemi. I dati e le
informazioni sono trasferiti tra sistemi diversi, quando necessario, dai sistemi locali o da altri
sistemi centrali. Così, un operatore di un centro di controllo ha uno scambio di informazioni
trasparente da e con tutti i sistemi che partecipano al controllo. La condivisione di funzioni
garantisce che una richiesta funzionale di un operatore è risolta anche se i dati richiesti devono
essere prelevati da un altro sistema di controllo e anche se le risorse informatiche degli altri
sistemi sono in uso. Ogni sistema partecipante può svolgere e rilevare il lavoro dato ad un altro
sistema.
Altri sistemi informatici che hanno bisogno di accedere ai dati e alle informazioni raccolte nel
sistema di classe 3, possono essere integrati con i computer del sistema. Alcuni esempi
includono computer per la risoluzione di compiti dedicati nell'ambito delle competenze di un
sistema di controllo, come ad esempio computer per la gestione del carico ed altri sistemi
informatici amministrativi per la gestione dei clienti e la fatturazione. L' idea chiave di un
sistema di classe 3 è quella di utilizzare i dati raccolti nell’ambito del sistema sfruttando lo
scambio di informazioni tra computer attraverso la rete informatica.
6.3 Interazioni tra i sistemi
I principi di progettazione e gli obiettivi del sistema devono soddisfare molte esigenze
contrastanti, così come diverse esigenze organizzative e funzionali. Normalmente il sistema di
controllo è costituito da numerosi sottosistemi che lavorano assieme. Sia il software che
l'hardware di questi sistemi sono progettati per specifiche funzioni e la soluzione migliore
richiede che i diversi sistemi collaborino in modo ottimale. La soluzione finale dipende in
grande misura dalle esigenze e dai bisogni degli utenti. La completa configurazione del sistema
di controllo è un risultato diretto delle esigenze degli utenti, ma le realizzazioni tecniche
disponibili naturalmente giocano un ruolo importante. In questa sezione sono esaminati alcuni
aspetti che riguardano la configurazione del sistema di controllo.
6.3.1 Organizzazione operativa
L' organizzazione e il funzionamento del sistema di potenza determinano in gran parte la
struttura del sistema di controllo. Il concetto di sottosistema nazionale, regionale e distrettuale è
in parte una conseguenza di questo fatto, ma costituisce anche una gerarchia che prevede una
89
struttura interna adeguata per il sistema di controllo stesso. In ogni livello l'operatore e il
personale di gestione utilizzano il sistema di controllo per supervisionare e controllare i
sottosistemi di potenza. Alcuni esempi di come il sistema di controllo viene utilizzato da queste
due categorie di personale, sono i seguenti.
Livello gestionale
¾ Coordinamento con la rete dei servizi pubblici e con i sistemi elettrici vicini
¾ Rilascio di documenti relativi alle sequenze di commutazioni previste
¾ Sviluppo di piani per il ripristino dell'alimentazione del sistema dopo una perturbazione
e aiuto all'operatore durante il suddetto ripristino
¾ Controllare della capacità del sistema di sopportare ulteriori disturbi
Livello operatore
¾ Controllo dello stato attuale del sistema di potenza
¾ Avviamento, fermata e controllo di dispositivi e macchinari
¾ Esecuzione di sequenze previste di commutazione
¾ Ripristino del sistema dopo i guasti
Il funzionamento del sistema di potenza è di solito effettuato in base al principio di suddivisione
gerarchica e organizzativa il che può anche essere motivato dal fatto che differenti sottosistemi
e componenti richiedano diversi tipi di gestione e di controllo.
Ad ogni livello organizzativo corrisponde un sottosistema di comando. Oggi i sistemi di
controllo sono costituti da computer, di vari gradi di complessità, che lavorano in tempo reale.
La diffusione geografica del sistema di potenza impone requisiti stringenti sulla modalità di
comunicazione dei dati. L'utente, ossia uno degli operatori del sistema, controlla e supervisiona
il processo con l'aiuto di un sistema di interfaccia uomo-macchina che consiste di un
videoterminale con grafica a colori e una tastiera. Questi videoterminali riproducono in modo
rapido, accurato ed accessibile ciò che sta accadendo, ad esempio, nella rete o in una centrale
elettrica. Normalmente le informazioni che provengono dalla rete o dalle centrali elettriche
(trasmesse dal sistema locale) sono raccolte al più basso livello gerarchico. Da questo livello
viene trasmessa al livello superiore o la serie completa dei dati oppure un estratto selezionato di
questi ultimi. La procedura viene ripetuta fino a giungere al più alto livello dove vengono prese
le decisioni in merito alla gestione del sistema elettrico nel suo complesso.
6.3.2 Attribuzione di funzioni nel sistema di controllo gerarchico
Va osservato che, in quanto precede, nulla è stato detto riguardo al livello in cui una funzione
del sistema di controllo dovrebbe essere posta nella gerarchia di un sistema di controllo. Le
90
informazioni disponibili per un centro di controllo possono includere tutti i dati disponibili ai
livelli gerarchici più bassi, oppure soltanto un sottoinsieme di essi. Se i dati trasferiti tra i
diversi livelli gerarchici sono filtrati dai livelli più bassi da alcune funzioni di elaborazione del
segnale (funzioni SCADA), allora viene eseguita una assegnazione di funzioni. L'idea chiave è
quella di trasferire informazioni da un sistema locale al sistema centrale, piuttosto che dati
grezzi. Le funzioni di supervisione, tuttavia, devono essere assegnate al sistema centrale che
deve ricevere i dati da più di un sistema locale. Le funzioni di elaborazione dei segnali, come il
trattamento di un evento e di un allarme, sono preferibilmente assegnate vicino ai punti di
raccolta del segnale, ad esempio nel sistema locale. Le attribuzioni funzionali che competono ai
diversi livelli di controllo dipendono da un gran numero di fattori, tra cui:
¾ Dimensioni del sistema locale:
un piccolo sistema locale, con pochi dati di I/O analogici e digitali, normalmente non ha
alcun trattamento del segnale o funzioni SCADA. Semplicemente raccoglie i dati e, al
massimo, esegue comandi di on/off digitali. Il sistema centrale effettua tutte le funzioni
di
controllo del sistema. Sistemi locali più grandi possono avere una notevole capacità di
calcolo che gli permette di eseguire sia le funzioni di controllo locale che una vasta
gamma
di funzioni SCADA. Questi sistemi inviano informazioni filtrate, non solo dati grezzi, al
sistema centrale.
¾ Capacità e tipo del sistema di comunicazione:
un link di comunicazione in grado di trasferire dati ad alta velocità, può naturalmente
collegare un sistema locale con un minore contenuto funzionale ad un sistema centrale
che
svolge la maggior parte delle funzioni del sistema di controllo.
¾ Capacità di trasformazione dei dati:
un sistema centrale collegato tramite, collegamenti ad alta velocità, a sistemi locali che
non
pre-elaborano i dati, deve avere una capacità di elaborazione che garantisca il
funzionamento anche alle massime frequenze di arrivo dei dati. Questa funzionalità
include
parametri interni del computer come ad esempio i tempi di accesso alla memoria, la
frequenza di ciclo, la capacità dei bus di dati, ecc.
91
Un sistema di comunicazione in grado di trasferire tutti i segnali da tutti i sistemi locali alla
massima velocità è costoso. La progettazione del sistema di comunicazione gioca
evidentemente un ruolo importante una volta che le funzioni del sistema di controllo sono state
assegnate.
6.3.3 Configurazioni del sistema di controllo
Oggi ci sono tipiche strutture in un sistema di controllo dove le unità basate sui computer sono
collegate tra di loro a formare differenti soluzioni strutturali del sistema di controllo. Di seguito
vengono brevemente descritte le funzioni di ogni livello e sono indicati alcuni importanti aspetti
di progettazione che influiscono sulla soluzione strutturale di un sistema di controllo:
¾ Sistema uomo-macchina, dove videoterminali e tastiere costituiscono le unità più
importanti per la presentazione e il dialogo con l’operatore. Il videoterminale è oggi in
genere un display grafico a colori e il controller del videoterminale (computer di
interfaccia uomo-macchina) può supportare uno o più videoterminali. Il controller può
contenere informazioni statiche che appaiono sul display. Il computer di interfaccia può
così memorizzare e supportare una soluzione distribuita dove display e informazioni
sono momentaneamente memorizzate in questi controlli dei videoterminali e non nel
computer principale.
¾ Il sistema informatico principale è costituito da sistemi costituiti da microcomputer e
minicomputer con capacità variabile. I computer possono essere configurati su base
singola, doppia e multicomputer. L'utilizzo di un database e di un design modulare del
software sono elementi chiave nella progettazione del sistema. Le caratteristiche del
real-time sono fortemente determinate dal database e dal suo design. I compiti dei
collegamenti computer-computer al computer principale sono molto chiari. Tali
collegamenti sono utilizzati per il trasferimento di dati in tempo reale e per il
collegamento con computer aziendali e con altri computer dedicati e computer
amministrativi.
¾ I computer di comunicazione (“front-end”) gestiscono la trasmissione di dati tra i
sistemi locali e centrali. Possono alleviare il carico dal (o dai) computer del sistema
centrale e locale e quindi aumentare la capacità del sistema di controllo. I computer
possono comunicare su vari link, dai collegamenti dedicati e dai collegamenti a
microonde, a reti pubbliche a commutazione di pacchetto e sistemi di telefonia mobile.
L'utilizzo di collegamenti di comunicazione ridondanti tra i vari computer ne aumenta la
disponibilità.
¾ Sistemi locali computer-based si trovano in centrali e sottostazioni. Essi comprendono
una vasta gamma di sistemi diversi sia in termini di dimensioni che di contenuti
92
funzionali. Possono avere dimensioni diverse; quelli più piccoli svolgono funzioni di
base mentre le unità più grandi eseguono funzioni distribuite (automatiche) e funzioni di
interfaccia locale uomo-macchina. Questi sistemi più avanzati possono coprire intere
centrali o sottostazioni formando complete stazioni di sistemi informatici, integrando il
controllo locale, la protezione e la funzione del tradizionale sistema di controllo locale.
93